
1
###########################################################################
Analiza wektorowa i tensorowa
D. E. Kumpiak
Wydawnictwo Uniwersytetu Twierskiego
Twier 2007
***************************************************************************
tłumaczenie : R. Waligóra
Pierwsze tłumaczenie 2008
Ostatnia modyfikacja : 2013-03-10
Tłumaczenie całości książki.
//////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
Wstęp do tłumaczenia
Przedstawiona publikacja (jak sam tytuł wskazuje) jest wprowadzeniem do algebry i analizy wektorów oraz
tensorów, wraz z pewnymi ich zastosowaniami. Większą część pracy poświęcono na wyłożenie (nowoczesne)
teorii form różniczkowych. Prezentowany tekst nie jest materiałem dla początkujacego w temacie, dlatego też od
czytelnika wymaga się znajomości podstawowych zagadnień algebry liniowej i podstaw analizy na
rozmaitościach.
Dla lepszego zrozumienia tekstu warto sięgnąć po następujące książki dostępne w języku polskim :
„Wykłady z algebry liniowej” - I. M. Gelfand PWN 1975
„ Algebra liniowa wraz z geometrią wielowymiarową” - N. W. Jefimow, E. R. Rozendorn PWN 1974
„Wstęp do algebry – algebra liniowa” - A. I. Kostrykin WN PWN 2007
„Algebra liniowa i geometria” - A. I. Kostrykin, J, I. Manin WN PWN 1993
„Algebra liniowa z geometrią” - A. Białynicki-Birula PWN 1976
„Analiza na rozmaitościach” - M. Spivak WN PWN 2005
„Teoria form różniczkowych” - H. Flanders PWN 1969
„Analiza matematyczna dla fizyków” tom 2 - L. Górniewicz, R. S. Ingarden PWN 1985
„Algebra i analiza tensorów” - J. Ploch Wydawnictwo Politechniki Warszawskiej 1990
////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////////
Oznaczenia
Umowa sumacyjna. W rachunku tensorowym ogólnie przyjmuje się następującą umowę. Jeżeli w jakimkolwiek
wyrażeniu jednoczłonowym występuje dwukrotnie jeden i ten sam indeks literowy, jeden raz na dole jeden raz
na górze to względem tego indeksu należy dokonać sumowania. Znak sumy Σ, przy takim zapisie zostaje
pominięty. Przedział sumowania zazwyczaj rozciąga się od 1 do n
∈
N. Czemu jest równe n, zazwyczaj wynika z
kontekstu. Zwykle n jest równe wymiarowi przestrzeni wektorowej (afinicznej), na której zadane są
rozpatrywane obiekty (tensory lub pola tensorowe).
Przykładowo : zapis Xi Y
i należy rozumieć jako :
n
Σ
Xi Y
i = X
1 Y
1 + … +X
n Y
n
i=1
a zapis : yi = Aij x
j – jako :
n
yi =
Σ
Aij x
j = Ai
1 x
1 + … + Ai
n x
n
i=1
Jeżeli występuje klika par powtarzających się indeksów to sumowanie prowadzimy względem każdej z takich
par. Przykładowo : Xi A
i
j Y
j , należy rozumieć jako :
n n
Σ
Σ
Xi A
i
j Y
j
i=1 j=1
Uwaga ! względem indeksów numerujących inne indeksy, sumowania nie prowadzimy.

2
Przykładowo : Xik eik
oznacza :
n n
Σ
Xik eik a nie
Σ
Xik eik
ik=1 k=1
( Uwaga !. oznaczenie Xik – oznacza, że indeks i (w tym przypadku górny ) posiada podindeks k )
Macierze. Znakiem (Aij )
n
i,j=1 oznaczamy n
×
n wymiarową macierz A o elementach Aij
Indeksy górne numerują wiersze, dolne – kolumny. Jeżeli oba indeksy są górne (dolne) to lewe indeksy
numerują wiersze a prawe kolumny. W szczególności – przykładowo – prawo mnożenia macierzy zapisujemy
następująco :
(A • B )ij = A
i
k • B
k
j .
Wektory. Dla oznaczenia wektorów wykorzystujemy pogrubione litery łacińskie postaci : X, Y, r, F, e ....
Numery współrzędnych wektora w bazie piszemy na górze.
Przykładowo : X = X1 e1 +...+ X
n e
n ,
gdzie : ei – wektory bazy, X
i – współrzędne wektora X w bazie { e
1,..., en }.
Numery współrzędnych elementów przestrzeni Rn również piszemy na górze tj. zapis a
∈
Rn oznacza ,że
a = ( a1 , .. ,an ) gdzie ai
∈
Rn .
Warto również przypomnieć znaczenia pewnych ogólnie przyjętych symboli matematycznych
def
= } znaczy „równe z definicji”
f : A
→
B } znaczy „funkcja (odwzorowanie) zadana na zbiorze A i przyjmująca wartości w zbiorze B”.
a |
→
b }znaczy „funkcja (jaka – to wynika z kontekstu) przeprowadzająca punkt a w punkt b”.
Zapis :
f
a |
→
b jest równoważny zapisowi : f(a) = b
f ○ g wyraża złożenie (iloczyn) odwzorowań f i g. Zgodnie z definicją :
( f ○ g ) (a) = f (g(a))
Znaki umowne w tekście.
◄ i ► oznacza początek i koniec dowodu
■ – koniec definicji
□ – koniec przykładu
Ćwiczenia oznaczone znakiem * nie są konieczne dla zrozumienia następującego po nich tekstu.
***************************************************************************************

3
1. Elementy algebry tensorowej
1.1 Przestrzeń sprzężona
Niech V będzie przestrzenią wektorową.
1.1.1 Definicje
Definicja. 1-forma na przestrzeni V – jest to liniowa funkcja na V tj. takie odwzorowanie ω : V
→
R dla którego
spełnione są warunki :
∀
X, Y
∈
V ω(X + Y) = ω(X) + ω(Y) (addytywność )
∀
X
∈
V i
∀
λ∈
Rn ω(
λ
• X ) =
λ
• ω(X) (jednorodność )
Pojęcia synonimiczne 1-formy, to : forma liniowa, kowektor ■
Przykład. Praca ω(r) = < F, r > stałej siły F na przemieszczeniu r jest 1-formą od r,
nak : < . , . > - oznacza standardowy iloczyn skalarny w przestrzeni trójwymiarowej. □
Zbiór wszystkich możliwych 1-form na przestrzeni V przyjęto oznaczać V*. Zbiór ten sam jest rzeczywistą
przestrzenią liniową względem naturalnych (standardowych) działań dodawania 1-form i mnożenia ich przez
liczby :
def
∀
ω,
ν
∈
V* (ω +
ν
) (X) = ω(X) +
ν
(X) + ω(Y)
def
∀
ω
∈
V* i
∀
λ∈
Rn (
λ
• ω) (X) =
λ
• ω (X) , X
∈
V
Ćwiczenie. Udowodnijcie to.
Definicja. Przestrzeń liniową V* nazywamy „przestrzenią sprzężoną” (jak również dualną lub wzajemną) do
wejściowej przestrzeni V ■
Niech rozpatrywana przestrzeń V będzie przestrzenią skończenie wymiarową : dim V = n.
Pokażemy, że w tym przypadku : dim V* = n.
W tym celu przyjmiemy w V pewną bazę (dowolną) : { e1,..., en } i rozpatrzymy
1-formy ej
∈
V* , j = 1...n, które określimy następująco :
def
∀
X
∈
V X = X1 e1+ ... + X
n e
n ; e
j(X) = Xj (1.1)
Innymi słowy, wartość ej , na wektorze X jest to j-ta współrzędna X w bazie { e1,..., en }.
Szczególnym przypadkiem wzoru (1.1) jest następująca zależność :
def
ej (e1) = δ
j
i = { 1 , jeżeli i = j (1.2)
{ 0 , jeżeli i ≠ j
Okazuje się, że układ 1-form {e1, ... en } jest bazą przestrzeni V* .
◄ Układ ten jest zupełny ponieważ :
∀
ω
∈
V* ω = ωi e
i , gdzie ω
i = ω(ei ), i = 1... n (1.3)
o czym łatwo się jest przekonać stosując trywialny rachunek :
∀
X
∈
V
ω(X) = ω(Xi ei ) = Xi ω (ei ) = Xi ωi = ωi ei (X) = ( ωi ei ) (X)
Dalej, układ ten jest liniowo niezależny ponieważ z warunku
λ
i e
i = 0 ,
λ
i
∈
R , który dosłownie znaczy, że :
∀
X
∈
V (
λ
i e
i ) (X) =0
wynika, że :
∀
j = 1...n 0 = (
λ
i e
i ) (e
j ) =
λ
i e
i (e
j ) =
λ
i δ
j
i =
λ
j ►

4
Definicja. Jeśli { ei }
n
i =1 jest pewną bazą przestrzeni V, to bazę { e
i }n
i =1 przestrzeni V
* , zbudowaną za
pomocą zależności (1.1) nazywamy „bazą sprzężoną” (lub dualną , wzajemną) względem wejściowej bazy
{ ei }
n
i =1 ■
1.1.2 Izomorfizm kanoniczny skończenie wymiarowej przestrzeni wektorowej i jej
przestrzeni sprzężonej
Dla każdego wektora X
∈
V można zdefiniować następującą 1-formę X ~ : V*
→
R na przestrzeni V*
(tj. X ~
∈
V** ) :
def
∀
ω
∈
V* X ~ (ω) = ω(X ) (1.4)
Okazuje się, że w przypadku kiedy V jest skończenie wymiarowa, odwzorowanie :
X
→
X ~
przestrzeni V na przestrzeń V** jest izomorfizmem.
◄ Liniowość ( tego odwzorowania – przypis własny ) można łatwo sprawdzić następująco :
dla dowolnych X, Y
∈
V i ω
∈
V *
( X + Y)~ (ω) = ω( X + Y) = ω(X ) + ω(Y) = X~ (ω) + Y~ (ω) = ( X~ + Y~ ) (ω)
ponieważ jest to słuszne dla dowolnego ω
∈
V *, to ( X + Y)~ = X~ + Y~. Analogiczny rachunek pokazuje ,że
dla wszystkich X
∈
V i
λ
∈
R spełniona jest równość : (
λ
• X )~ =
λ
• X ~
Udowodnimy teraz, że odwzorowanie X
→
X ~ jest bijektywne. Ponieważ dimV = dimV**, to wystarczy
udowodnić, że jest ono injektywne, tj. że jego jądro jest osobliwe.
Niech X ~ = 0 dla pewnego X ~
∈
V.
Co dosłownie oznacza, że ω(X) = 0 dla wszystkich ω
∈
V *.
Jeżeli { ei }
n
i =1 – jest bazą V, a { e
i }n
i =1 – jej bazą sprzężoną , to w szczególności mamy :
Xi =ei (X ) = 0, i = 1...n tj. X = 0 ►
Ćwiczenie. Niech { ei }n i =1 – będzie pewną bazą przestrzeni V , a { ei }n i =1 – bazą do niej sprzężoną .
Udowodnić, że : { ei
~}n
i =1 – jest bazą sprzężoną do { ei }
n
i =1
Definicja. Wskazany powyżej izomorfizm X
→
X ~ nazywamy „kanonicznym” ■
W dalszej części będziemy zawsze utożsamiać przestrzenie wektorowe V i V** tj. będziemy utożsamiać
wektory X
∈
V z odpowiadającym im zgodnie z wzorem (1.4) 1-formami X~
∈
V**. Istota takiego
utożsamienia stanie się jasna później. Dla uproszczenia zapisu znak „~” będziemy opuszczali.
W przeprowadzonych powyżej rachunkach (odnajdźcie je ! ) faktycznie udowodniliśmy, że
∀
X
∈
V i
∀
ω
∈
V**
X(ω) = ω(X) = Xk ω k = ( ω1, ... , ω n ) (X
1 )
( ... )
(Xn )
gdzie: X = Xi ei , ω = ωj e
j a { e
i }
n
i =1 i { e
j}n
j =1 – jest dowolną parą baz sprzężonych.
Ćwiczenie 1*. Udowodnić, że jeżeli { ei }n i =1 – jest pewną bazą V *, to można zawsze znaleźć bazę
{ ei }
n
i =1 przestrzeni V
, dla której { ei }n
i =1 – będzie bazą sprzężona.
Ćwiczenie 2*. Niech 1-formy: ω1, ... ,ωk
∈
V* 1 ≤ k
≤
n = dimV , będą liniowo niezależne.
Udowodnić, że zbiór :
{ X
∈
V |
∀
i = 1...k : ωi (X) = 0 }
jest podprzestrzenią liniową przestrzeni V o wymiarze (n – k).
(wskazówka : wykorzystać wynik poprzedniego ćwiczenia)

5
1.1.3 Własności transformacyjne wektorów i kowektorów
Niech { ei }
n
i =1 i { e’j }
n
j =1 będą pewnymi bazami przestrzeni V. Oznaczmy przez :
A = ( Ai j )
n
i, j = 1 , e’j A
i
j ei
j = 1… n (1.5)
macierz przejścia od pierwszej bazy do drugiej (primowanej).
Niech : { ej }n j =1 i { e’
j }n
j =1 – będą bazami odpowiednio sprzężonymi. Łatwo udowodnić , że :
e’i = (A -1)i j e
j i = 1 ... n (1.6)
◄ W istocie :
∀
X
∈
V X = X’k e’k mamy zatem :
[ (A -1)i j e
j ] (X) = (A -1)i
j e
j (X) = (A -1)i
j e
j (X’k e’
k ) = (A
-1)i
j X’
k
e
j ( e’
k ) =
= (A -1)i j X’
k ej (
A
l
k el ) = (A
-1)i
j X’
k Al
k e
j (
el ) = (A
-1)i
j X’
k Al
k δ
j
l = (A
-1)i
j X’
k Aj
k =
= δik X’
k = X’i = δj
l = e’
i (X) ►
Współrzędne jednego i tego samego wektora X = Xi ei = X’
j e’
j przestrzeni V w bazach :
{ ei
}n
i =1 i { e’j }
n
j=1 związane są między sobą zależnościami :
X’j = (A-1)j i X
i
j = 1 ... n (1.7)
lub w zapisie macierzowym :
X’ = (A-1) • X
gdzie : X’ = ( X’1 , ... X’n )T , X = (X
1, ... ,Xn )T
Współrzędne jednej i tej samej 1-formy ω = ωi e
i = ω’
j e’
j w bazach { ei }n
i =1 i { e’
j }n
j =1 związane są
miedzy sobą równością :
ω’j = (A)
i
j ωi
j = 1 ... n (1.8)
lub w zapisie macierzowym :
(ω’1, ... , ω’n ) = (ω1, ... , ωn ) • A
◄ W celu udowodnienia (1.7) wystarczy obliczyć wartość obu stron (1.6) dla dowolnego wektora X,
analogicznie dla udowodnienia (1.8) wystarczy obliczyć wartość obu stron (1.5) dla dowolnego kowektora ω :
X’j = e’j (X) = (A -1)i j e
i (
X ) = (A
-1)i
j X
i
ω’j = ω (e’j ) = e’j (ω) = Ai j ei (ω) = Ai j ω (ei ) = Ai j ωi ►
Dokonajmy podsumowania. W tym paragrafie właściwie już zbadaliśmy najprostszy przykład (szczególny)
tensorów : tensorów 1 raz kowariantnych tj. kowektorów i tensorów 1 raz kontrawariantnych tj. wektorów.
Zgodnie z definicją składowe tensora jednokrotnie kontrawariantnego (wektora) X w bazie{ ei }
n
i =1
przestrzeni V są to po prostu jego współrzędne ( X1, ... Xn ) , w tej bazie : X = Xi ei .
Zgodnie z definicją składowe tensora jednokrotnie kowariantnego (kowektora) ω w bazie { ei }
n
i =1- są to
współrzędne ( ω1, ... ωn ) rozkładu ω względem bazy { ei }n i =1 sprzężonej do bazy { ei }
n
i =1: ω = ωi e
i
„Kowariantny” tłumaczymy dosłownie jako „współzmienniczy” a „kontrawariantny” – jako
„przeciwzmienniczy”. (Zobacz uwagi w „Tadeusz Trajdos –Wróbel „Matematyka dla inżynierów” WNT 1966
str. 286 – przypis własny ).
Widzimy zatem, że przy zmianie (1.5) bazy przestrzeni V :
– składowe tensora 1 raz kowariantnego przekształcają się „tak samo” jak wektory bazy tj. jeżeli do wzorów
(1.8) podstawimy e’j – w miejsce ω’j oraz ei w miejsce ωi –to otrzymamy wzory (1.5)
- składowe tensora 1 raz kontrawariantnego przekształcają się „za pomocą” macierzy odwrotnej do macierzy
która „uczestniczy” w przekształceniu bazy : słuszne są wzory (1.7) i (1.5).
Bardziej ogólną definicję tensora rozpatrzymy w następnym paragrafie.

6
1.2 Tensory w przestrzeni liniowej Działania nad tensorami
1.2.1 Definicja tensora
Definicja. Tensor T – k razy kowariantny i m razy kontrawariantny na przestrzeni wektorowej V jest to funkcja
wieloliniowa (spotykamy również nazwę „ funkcja poliliniowa” – przypis własny )
T : V
×
...
×
V
×
V*
×
...
×
V*
→
R
________ _________
k razy m razy
T
( X1, ... , Xk ; ( ω
1, ... ωm )
→
T ( X1, ... , Xk ; ( ω
1, ... ωm ) ■
Wieloliniowość oznacza liniowość względem każdego z argumentów.
Przykładowo liniowość względem pierwszego argumentu wektora oznacza, że
∀
X, Y
∈
V i
∀
λ
,
µ
∈
R
T(
λ
• X +
µ
• Y ... ; ... ) =
λ
• T( X,... ; ... ) +
µ
• T( Y,... ; ... )
gdzie wielokropki oznaczają dowolny ustalony zbiór pozostałych (nieistotnych) argumentów. Warunek taki
powinien być spełniony również dla wszystkich pozostałych argumentów.
Liczbę k + m nazywamy „rzędem” (walencją) tensora T.
Wyrażenie : „tensor k razy kowariantny i m razy kontrawariantny” często skraca się do wyrażenia : „ tensor typu
( mk )” lub tensor postaci (k,m)”.
Zbiór wszystkich k razy kowariantnych i m razy kontrawariantnych tensorów na przestrzeni wektorowej V
oznaczamy przez : T mk (V). Zbiór ten jest przestrzenią liniową ze względu na naturalne (zwykłe) operacje
dodawania i mnożenia przez liczbę :
def
∀
T, R
∈
T mk (V). (T + R) ( ... ; ... ) = T( ... ; ... ) + R(... ; ... )
def
∀
T
∈
T mk (V) i
∀
λ
∈
R (
λ
• T) ( ... ; ... ) =
λ
• T( ... ; ... )
Ćwiczenie. Udowodnić to.
Tensory, k razy kowariantne rzędu k tj. tensory typu (k,0), są to zgodnie z ogólną definicją funkcji
wieloliniowej :
T : V
×
...
×
V
→
R
________
k razy
T
( X1, ... , Xk )
→
T ( X1, ... , Xk )
Tensory o takiej strukturze często nazywamy „formami k-liniowymi”, przy k =1 przyjęto mówić „1-forma”, przy
k=2 mówimy „forma biliniowa”. Oczywiście, że T 01 (V) = V*
Tensory, m razy kontrawariantne rzędu m tj. tensory typu (0,m) są to zgodnie z ogólna definicją funkcje
wieloliniowe :
T : V*
×
...
×
V*
→
R
________
m razy
T
( ω1, ... ωm )
→
T ( ω1, ... ωm )
Oczywiście, że T 10 (V) = V** ≈ V , gdzie znak „ ≈ ” oznacza izomorfizm kanoniczny (1.4).
Zgodnie z tym będziemy interpretować wszędzie tam gdzie to będzie potrzebne tensory 1 raz kontrawariantne
jako wektory w przestrzeni V. Wygodnie jest przyjąć zgodnie z definicją , że : T 00 (V) = R.

7
1.2.2 Iloczyn tensorowy
Definicja. „Iloczynem tensorowym” tensorów :
T
∈
T mk (V) i R
∈
T sr (V)
nazywamy tensor : T
⊗
R
∈
T m+s k+ r (V) wartość którego dla dowolnego zbioru argumentów :
( X1, ... , Xk+ r ; ( ω
1, ... ωm+ s )
∈
V k + r
×
V* m + s obliczamy zgodnie z wzorem :
( T
⊗
R ) ( X1, ... , Xk , Xk +1, ... , Xk+ r ; ω
1, ... ωm, ωm+ 1, ..., ωm+ s ) = T ( X
1, ... , Xk ; ω
1, ... , ωm) •
• R ( Xk +1, ... , Xk+ r ; ω
m+ 1, ... , ωm+ s ) ■
Ćwiczenie. Sprawdzić poprawność tej definicji tj. sprawdzić czy funkcja : T
⊗
R jest liniowa względem
każdego z argumentów. Dla uproszczenia zapisu rozpatrzcie jakikolwiek przypadek szczególny np. dla k=1,
m = 0 oraz r =0, s =1. W ogólnym przypadku postępowanie będzie analogiczne.
Z własności łączności mnożenia liczb rzeczywistych i przemienności mnożenia względem dodawania
bezpośrednio wynikają analogiczne własności iloczynu tensorowego :
( T
⊗
R )
⊗
P = T
⊗
( R
⊗
P )
T
⊗
( R + P) = T
⊗
R + T
⊗
P i (R + P)
⊗
T = R
⊗
P + P
⊗
T
gdzie : T, R i P – są dowolnymi tensorami
(w drugiej i trzeciej równości tensory R i P mają oczywiście jednakową strukturę )
Łączność iloczynu tensorowego oznacza , że wyrażenia postaci :
P
⊗
Q
⊗
…
⊗
R
nie trzeba “rozdzielać“ nawiasami.
Należy jednak mieć na uwadze, że iloczyn tensorowy - ogólnie mówiąc - jest nie przemienny : T
⊗
R
≠
R
⊗
T
1.2.3 Składowe tensora w bazie
Jesteśmy już w stanie obliczyć wymiar przestrzeni liniowej T mk (V) i wskazać jej bazę (bazy).
Twierdzenie 1.1 Niech {ei}
n
i =1- będzie pewną bazą przestrzeni V , a { e
j}n
j =1- będzie bazą do niej dualną.
1). zbiór tensorów :
{ ej1
⊗
... ejk
⊗
ei1
⊗
...
⊗
eim | j1, ... , jk ; i1 , ... , im = 1...n } (1.10)
jest bazą w przestrzeni T mk (V) . W szczególności rozmiar tej przestrzeni jest równy n
k + m
.
2).
∀
T
∈
T mk (V)
T = Ti1 ... imj1 ... jk e
j1
⊗
... ejk
⊗
ei1
⊗
...
⊗
eim (1.11)
gdzie :
def
Ti1 ... imj1 ... jk = T( ej1,..., ejk ; e
i1,..., eim )
◄ Układ tensorów (1.10) jest liniowo nie zależny. W istocie, jeśli pewna liniowa kombinacja tych tensorów jest
równa zeru (tj. jest równa tensorowi zerowemu) :
λ
i1 ... im
j1 ... jk e
j1
⊗
... ejk
⊗
ei1
⊗
...
⊗
eim = 0 gdzie
λ
...
...
∈
R
to wszystkie współczynniki
λ
...
... są równe zeru lub wartość tej liniowej kombinacji na zborze
( ej1,..., ejk ; e
i1,..., eim ) jest równa
λ
n1 ... nm
s1 ... sk e
s1
⊗
... esk
⊗
en1
⊗
...
⊗
enm ( ej1,..., ejk ; e
i1,..., eim ) =
λ
n1 ... nm
s1 ... sk e
s1( e
j1) ... e
sk ( e
jk) en1(e
i1) ... e
nm(e
im ) =
λ
n1 ... nm
s1 ... sk δ
s1
j1 ... δ
sk
jk
δi1nm =
λ
i1 ... im
j1 ... jk

8
Dalej, dla dowolnego zbioru argumentów ( X1, ... , Xk ; ω
1, ... , ωm )
∈
Vk
×
V*m
z uwzględnieniem wzorów (1.1) , (1.3) i (1.4) otrzymamy :
T( X1, ... , Xk ; ω
1, ... , ωm ) = T(Xj1
1ej1, ... , X
jk
kejk ; ω
1
i1 e
i1 , ... ,ωm
im e
im ) =
= Xj11 ... X
jk
k ω
1
i1... ω
m
im T (ej1, ... , ejk ; e
i1, ... ,eim ) =
e
i1(X
1 ) ... e
jk(X
k )
ω1 (ei1 ) ... ωm (eim ) Ti1 ... imj1 ... jk = Ti1 ... imj1 ... jk ej1
⊗
... ejk
⊗
ei1
⊗
...
⊗
eim ( X1,.. , Xk ; ω
1,... ,ωm )
co udowadnia zupełność układu (1.10) i równość (1.11) ►
Definicja. Liczby :
Ti1 ... imj1 ... jk = T( ej1,... , ejk ; e
i1, ... , eim ), j
1,.. , jk ; i1,.. , ik = 1 ... n
nazywamy „składowymi“ tensora T w bazie { ei }
n
i = 1, przestrzeni V. ■
Liczby te są również składowymi tensora T w bazie (1.10) przestrzeni T mk (V) która jest określona przez bazę
{ ei }
n
i = 1 jednoznacznie.
Przykład. Każdy operator liniowy B : V
→
V określa tensor z nim stowarzyszony (sprzężony) B
∈
T 11 (V)
wartość tego operatora na dowolnym zbiorze argumentów (X, ω)
∈
Vk
×
V* obliczamy zgodnie z wzorem :
def
B (X, ω) = ω(B(X )) (1.12)
Jeżeli ustalimy w V bazę { ei }
n
i = 1, to operator B jest jednoznacznie określony przez swoją macierz w tej bazie
,a tensor B stowarzyszony z nim – przez swoje składowe w tej bazie :
B(ej ) B
i
j ei , j = 1...n ; B = B
i
j e
j
⊗
ei ; B
i
j = (ej ; e
i )
Należy zauważyć, że w obu rozkładach współczynniki Bij - są jedne i te same. Udowodnijcie to !
Macierz operatora tożsamościowego : Id : V
→
V . Id(X) = X, w dowolnej bazie jest macierzą jednostkową
( δij )
n
i,j = 1. Zatem δ-symbol Kroneckera jest składową 1 raz kowariantnego i 1 raz kontrawariantnego tensora
– zwanego „tensorem jednostkowym”.
1.2.4 Własności transformacyjne tensorów.
Rozłożymy jeden i ten sam tensor T
∈
T 11 (V) względem różnych baz postaci (1.10) :
T = Ti1 ... imj1 ... jk e
j1
⊗
... ejk
⊗
ei1
⊗
...
⊗
eim = T’
n1 ... nmσ1 ... σk e’σ1
⊗
... e’σk
⊗
e’n1
⊗
...
⊗
e’nm
Wtedy składowe tensora T w bazach : { e’j }
n
j = 1 i { ei }
n
i = 1 związane będą między sobą równością :
T’ n1 ... nmσ1 ... σk = A
j1σ1 A jkσk (A-1)n1i1 … (A-1)nmim Ti1…im j1…jk (1.13)
gdzie : A = ( Aij )
n
i,j = 1 – jest macierzą przejścia od bazy { ei }
n
i = 1 do bazy { e’j }
n
j = 1 tj. e’j = A
i
j ei
◄ Z pomocą (1.6) znajdujemy :
Tn1 ... nmσ1 ... σk = T(e’σ1, ... , e’σk ; e’
n1, ..., e’nm ) = T(A j1σ1ej1, ... , A jkσk ejk ; (A-1)n1i1 ei1, ... ,
(A-1)nmim e
im) = A j1σ1 , … A jkσk (A-1)n1i1 , ... , (A-1)nmim T (e’j1, ... , e’jk ; e’i1, ..., e’im ) =
= A j1σ1 , … A
jkσk (A-1)n1i1 , ... , (A-1)nmim Ti1 ... imj1 ... jk ►
Zauważmy jeden podstawowy fakt. Aby zadać tensor T
∈
T mk (V) , wystarczy zadać jego składowe T
...
... w
jakiejkolwiek bazie { ei }
n
i = 1, przestrzeni V tj. zadać współrzędne rozkładu T względem bazy (1.10)
przestrzeni T mk (V) , rozpiętej na bazie { ei }
n
i = 1. W zastosowaniach rachunku tensorowego (takich jak
mechanika ośrodków ciągłych, elektrodynamika, OTW i innych ) tensory zwykle zadaje się właśnie w ten
sposób. Znając składowe T w jednej bazie, można łatwo obliczyć jego składowe w dowolnej innej bazie za
pomocą wzorów (1.13).

9
1.2.5 Operacja zawężania ( kontrakcji – przypis własny)
Definicja. Niech T
∈
T mk (V) , przy czym k > 0 i m > 0. Zawężeniem tensora T względem a-tego wektorowego
i b-tego kowektorowego argumentu ( a = 1...k ; b = 1...m) nazywamy tensor : tr ba T
∈
T m-1k-1 (V ), wartość
którego na dowolnym zbiorze argumentów ( X1, ... , Xk-1 ; ω
1, ... , ωm-1 )
∈
Vk-1
×
V* m-1
obliczamy zgodnie z zasadą : (tr – jest symbolem śladu macierzy ; ang. trace – ślad – przypis własny)
tr ba T ( X1, ... , Xk-1 ; ω
1, ... , ωm-1 ) = T ( X
1, ... , Xa-1, ei ,Xa, ... , Xk-1; ω
1, ... , ωb-1,ei ,ωb,..., ωm-1) (1.14)
gdzie : { ei }
n
i = 1- jest pewną bazą przestrzeni V, a { e
j
}
n
j = 1.- bazą do niej sprzężoną. ■
Należy upewnić się w poprawności danej definicji tj. w tym, że prawa część (1.14) nie zależy od wyboru bazy
{ ei }
n
i = 1.
Jest to łatwe. Niech { e’j }
n
j = 1i { e’
j
}
n
j = 1- będą inną parą baz dualnych oraz e’j = A
i
j ei .
Wtedy e’j = (A
-1)j
µ
e
µ
i :
T (... , e’j ,..., ; ... ,e’
j, ... ) = T(... , Ai
j ei , ... ; ... , (A
-1)j
µ
e
µ
, ... ) = Aij (A
-1)j
µ
T( ... , ei ,..., ; ... ,e
µ
, ... ) =
= δ i
µ
T ( ... , ei ,..., ; ... ,e
µ
, ... ) = T( ... , e
i ,..., ; ... ,e
i , ... ) c.b.d.u
Przykład. Zawężeniem (1,1) – tensora T jest zgodnie z definicją liczba :
tr ba T = T( ei ; e
i )
która jak udowodniliśmy powyżej nie zależy od wyboru bazy { ei }
n
i = 1. Fakt ten potwierdza nasze
def
stwierdzenie o tym , że : T 00 (V) = R.
Sprawdźcie, że tr11 T jest śladem tr T operatora liniowego T, stowarzyszonego z T (ślad operatora liniowego –
jest to suma elementów diagonalnych jego macierzy w jakiejkolwiek bazie od której wyżej zdefiniowana liczba
nie zależy). Zwykle piszemy tr T zamiast tr11 T .□
Ćwiczenie. Udowodnić, że
∀
X
∈
V i
∀
ω
∈
V *
ω(X) = X(ω) = tr (X
⊗
ω) = tr (ω
⊗
X)
Uwagi terminologiczne. Operacje zawężenia tensora po a-temu wektorowemu i b-temu kowektorowemu
argumentowi nazywamy również „operacją zawężenia względem a-temu indeksowi dolnemu i b-temu indeksowi
górnemu” Terminologia ta związana jest z prawem obliczania zawężenia we współrzędnych. (zobacz równość
(1.18) ) ■
1.2.6 Zawężenie tensora względem wielu indeksów (zawężenie multiindeksowe – przypis
własny)
Tensor można zawężać nie tylko względem pary indeksów (tj. względem pary argumentów), można go również
zawęzić względem pary wielu argumentów (tj. względem wielu par argumentów) Aby uniknąć
skomplikowanego zapisu wyjaśnimy temat na prostym przykładzie.
Niech będzie dany tensor T postaci (3,2). Zawężeniem tensora T względem indeksów (1.3) i (2.1) będzie tensor
jeden raz kowariantny : tr(2,1)(1,3) T , określony równością :
[ tr(2,1)(1,3) T ] (X) = T( ei ,X , ej ; e
j , ei )
tj. zawężamy pierwszy argument wektorowy z drugim kowektorowym a następnie trzeci wektorowy z
pierwszym kowektorowym.
W sposób analogiczny można sprawdzić ,że operacja zawężenia względem wielu indeksów jest poprawnie
zdefiniowana tj. nie zależy od wyboru bazy { ei }
n
i = 1. Oczywiście zawężenie tr
αβ
T ma sens tylko wtedy
kiedy multiindeksy
α
i
β
składają się z jednakowej ilości indeksów.

10
1.2.7 Działania algebry tensorów we współrzędnych
Niech tensory : T, P
∈
T mk (V) , R
∈
T σr (V) zadane są poprzez swoje składowe w pewnej bazie { ei }
n
i =1
przestrzeni V :
T = Ti1 ... imj1 ... jk e
j1
⊗
... ejk
⊗
ei1
⊗
...
⊗
eim
P = Pi1 ... imj1 ... jk e
j1
⊗
... ejk
⊗
ei1
⊗
...
⊗
eim
R = Ri1 ... iσjr ... jk e
j1
⊗
... ejr
⊗
ei1
⊗
...
⊗
eiσ
Wtedy składowe tensorów T + P ,
λ
T (gdzie
λ
∈
V ) , T
⊗
R, trba T w tej bazie określone są równościami :
(T + P) i1 ... imj1 ... jk = T
i1 ... im
j1 ... jk + P
i1 ... im
j1 ... jk (1.15)
(
λ
•T) i1 ... imj1 ... jk =
λ
Ti1 ... imj1 ... jk (1.16)
(T
⊗
R)i1 ... imim+1...im+σj1 ... jkjk+1 ... jk+ r = T
i1 ... im
j1 ... jk •R
im+1 ... im+σ
jk+1 ... jk + r (1.17)
( trba T )
i1 ... im -1
j1 ... jk - 1 = T
i1 ... ib - 1
µ
ib ... im - 1
j1 ... ja – 1
µ
ja ... jk - 1 (1.18)
◄ Równości (1.15) i (1.16) są oczywiste. W celu udowodnienia (1.17) wystarczy przypomnieć definicje
iloczynu tensorowego (1.9) i definicje (1.11) składowych tensora w bazie :
(T
⊗
R)i1 ... imim+1...im+σj1 ... jkjk+1 ... jk+ r = (T
⊗
R)( ej1, ..., ejk , ejk + 1, ... , ejk+ r ;
; e
i1, ... , eim ,
e
im + 1, ... , eim + σ ) = T( e
j1, ..., ejk ; e
i1, ... , eim ) •R( e
jk + 1, ..., ejk + r ; e
im + 1, ... ,eim+ σ )
= Ti1 ... imj1 ... jk • R
im + 1 ... im + σ
jk + 1 ... jk + r
Analogicznie można udowodnić (1.18):
( trba T )
i1 ... im -1
j1 ... jk - 1 = ( tr
b
a T ) ( ej1, ..., ejk - 1 ; e
i1, ... , eim - 1 ) = T( e
j1, ..., eja - 1 , e
µ
, eja , ... ,
ejk – 1; e
i1, ... , eib - 1, e
µ
, eib, . eim – 1) = Ti1 ... ib - 1
µ
ib ... im - 1
j1 ... ja – 1
µ
ja ... jk - 1 ►
Analogiczne do (1.18) zapisujemy we współrzędnych operację zawężenia względem pary multiindeksów.
przykładowo , jeśli :
T
∈
T 23 (V) , T =T
uw
imj e
i
⊗
em
⊗
ej
⊗
eu
⊗
ew
to [ tr (2,1)(1,3) T )] = T
ij
imj e
m
1.3 Tensory na przestrzeni liniowej z iloczynem skalarnym (tj. przestrzeni liniowej w której
zdefiniowano iloczyn skalarny – przypis własny)
Przypomnijmy , że „iloczynem skalarnym” na przestrzeni liniowej V nazywamy formę biliniową (tj. tensor
dwukrotnie kowariantny) g : V
×
V
→
R , spełniającą pewne dodatkowe warunki tj. symetryczności i nie
osobliwości.
1).
∀
X, Y
∈
V g (X , Y ) = g (Y , X ) (symetria)
2).
∀
Y
∈
V g (X , Y ) = 0 ⇒ X = 0 (nie osobliwość )
Definicja. Iloczyn skalarny g nazywamy również (kowariantnym) „tensorem metrycznym”.
Parę ( V, g) nazywamy przestrzenią (pseudo)euklidesową. Jeżeli forma kwadratowa tensora metrycznego g jest
dodatnio określona tj.
3).
∀
X
∈
V \{0} g (X , X ) > 0
to przyrostek “pseudo” opuszczamy. ■
Jak wiadomo z kursu algebry liniowej macierz ( gij )
n
i,j = 1 złożoną ze składowych gij , tensora metrycznego g
w jakiejkolwiek bazie { ei }
n
i = 1. przestrzeni V , nazywamy „macierzą Grama” tej bazy :
(g11, ... , gnj )
macierz Grama = ( ....... .............) gdzie gij = g ( ei , ej ) tj. g = gij e
i
⊗
ej
( gn1, ... , gnn )

11
Macierz Grama jest macierzą symetryczną (na mocy warunku 1) i nieosobliwą (na mocy warunku 2).
W przestrzeni (pseudo)euklidesowej zawsze istnieje baza w której macierz Grama jest macierzą diagonalną :
( gij )
n
i,j = 1 = diag ( +1, ... , +1, -1, ... , -1) n+ + n- = dimV
_________ _______
n+ n-
Taką bazę nazywamy (pseudo)ortonormalną (przy n- = 0 przyrostek „pseudo” opuszczamy).
Para liczb (n+ , n- ) określa „sygnaturę” tensora metrycznego.
Przestrzeń Euklidesa ma sygnaturę (n, 0) = (+, ... ,+). Ważnym przykładem przestrzeni nieeuklidesowej jest
przestrzeń Minkowskiego tj. czterowymiarowa , rzeczywista przestrzeń liniowa o tensorze metrycznym który ma
sygnaturę lorentzowską : (1,3) = (+, -, -, - )
(w literaturze fizycznej można spotkać równie często sygnaturę odwrotną tj. (3,1) = (-, + , +, + ). Odmienne
sygnatury nie wprowadzają jakiś odmiennych wniosków fizycznych są raczej wynikiem przyjętej przez autora
danej publikacji konwencji zapisu. Przeglądu spotykanych sposobów zapisu dokonują autorzy książki
„Grawitacja” ( w rosyjskim wydaniu w tomie I na wewnętrznej stronie okładki) – przypis własny.
Spotyka się również definicje sygnatury jako algebraiczną sumę znaków + i -.
Jak łatwo sprawdzić, że iloczyn skalarny wektorów X = Xi ei i Y = Y
i
ej wyraża się przez ich współrzędne w
pewnej bazie { ei }
n
i = 1 oraz przez macierz Grama w tej bazie w następujący sposób :
g(X , Y) = gij X
i
Y
j
(1.19)
gdzie : gij ( ei , ej )
W istocie : g (Xi ei , Y
i
ej ) = X
i
Y
i
g (ei , ej ) = X
i
Y
i
gij
1.3.1 Utożsamienie wektorów i kowektorów w przestrzeni (pseudo)euklidesowej
Wprowadzenie tensora metrycznego g , na skończenie wymiarowej przestrzeni V pociąga za sobą kanoniczny
izomorfizm przestrzeni V i V* :
def
G : V
→
V* ,
∀
X
∈
V G(X ) = g (X, • ) (1.20)
tj.
∀
Y
∈
V G(X )(Y) = g (X, Y )
◄ Odwzorowanie G jest zdefiniowane poprawnie :
∀
X
∈
V G(X ) jest 1-formą na V, ponieważ g jest liniowe
względem drugiego argumentu . I dalej, G jest również liniowe względem drugiego argumentu.
Udowodnimy, że G jest bijekcją. Ponieważ dimV = dimV * to w tym celu wystarczy udowodnić , że G jest
injekcją tj. kerG = {0} – co jest oczywiste. (ker G – oznacza jądro odwzorowania G – przypis własny )
Jeśli X
∈
kerG tj. G(X) = 0, to
∀
Y
∈
V G(X )(Y) = g (X, Y ) = 0.
Na mocy warunku nie osobliwości wynika, że X = 0 ►
Mówimy, że wektor X i 1-forma G(X) są sprzężone.
1.3.2 Kontrawariantny tensor metryczny
Izomorfizm kanoniczny G pociąga za sobą tensor metryczny g* na przestrzeni V*
g* : V*
×
V*
→
R :
def
g* (ω, η ) = g (G-1 (ω) , (G
-1(η ) ) = ω ( G-1(η) ) = G-1(ω) (η) (1.21)
Innymi słowy iloczyn skalarny dwóch 1-form jest to - z definicji - iloczyn skalarny tensorów z nimi
stowarzyszonych.
Ćwiczenie. Sprawdzić, że g* - jest rzeczywistą formą biliniową na V* tj.
g*
∈
T 01 (V* ) = T
1
0 (V )
spełniającą warunki symetrii i nie osobliwości.
12
Definicja. Tensor g* nazywamy „kontrawariantnym tensorem metrycznym” (kontrawariantnym względem
wejściowego kowariantnego tensora g ) ■
Niech będzie dana para (ustalonych) baz dualnych { ei }
n
i = 1i {e
i
}
n
i = 1 odpowiednio w przestrzeni V i V*.
Okazuje się , że macierz Grama :
(gij )
n
i, j = 1 , gij = ( ei , ei ) i (g
ij
)
n
i,j = 1 , g
ij
= g* ( e
i
, e
j
)
tensorów metrycznych g i g* jest wzajemnie odwrotna :
gik g
ikj
= δ
j
i (1.22)
◄ W istocie – zauważmy , że :
G( ei) = gij e
j
i G
-1
(e
i
) = g
ij
ej
(co łatwo sprawdzić prostymi rachunkami, obowiązkowo sprawdźcie je !). Odpowiednio zatem wskazane
macierze są wzajemnie odwrotne jako macierze wzajemnie odwrotnych operatorów liniowych. ►
1.3.3 Podniesienie i opuszczenie indeksów
Jeśli wektor X = Xi ei
∈
V i kowektor ω = Xi e
i
∈
V* są sprzężone to ich składowe ( w bazie { ei }
n
i = 1 )
związane są równościami :
Xi = gij X
j
i X
i
= g
ij
Xj i = 1 ... n (1.23)
◄ Łatwo to sprawdzić to prostymi rachunkami zobacz (1.1) , (1.3) i (1.21) :
Xi = ω(ei ) = G(X) (ei ) = g (X , ei ) = g ( X
j
ej , ei ) = X
j
g ( ej , ei ) = X
j
gji
Xi = X (e
i
) G
-1
(ω) (e
i ) = g* (ω, ei
) = g* (Xje
j
, e
i
) = Xj g* (e
j
, e
i
) = Xjg
ji
.►
Terminologia. Mówimy, że kowektor ω otrzymujemy z wektora X poprzez operacje „opuszczenia indeksu” , a
wektor X otrzymujemy z kowektora ω poprzez operacje „podniesienia indeksu”.
Liczby Xj , ... , Xn nazywamy składowymi kowariantnymi wektora X w bazie { ei }
n
i = 1
(w odróżnieniu od jego składowych kontrawariantnych (X1 , ... , X
n
) ■
Geometryczna interpretacja składowych kowariantnych wektora jest następująca :
Xi = g(ei , X )
◄ Xi = gij Xj = g (ei , ej )Xj = g (ei , ej Xj ) = g (ei , X) .►
W szczególności , jeśli (V, g) – jest przestrzenią euklidesową i wektor bazy ei mają długość jednostkową , to Xi
jest wartością rzutu ortogonalnego wektora X na wektor ei .
Jeśli { ei }
n
i = 1 – jest bazą ortonormalną przestrzeni Euklidesa, to macierz Grama tej bazy jest jednostkowa :
gij = δij , i jak to widać z (1.23) :
Xi = δij X
j
= X
i
i = 1 ... n
tj. w przytoczonym przykładzie składowe kowariantne wektorów są zgodne z ich składowymi
kontrawariantnymi. Właśnie z tej przyczyny w kursie geometrii analitycznej składowe kowariantne i
kontrawariantne wektorów nie są rozróżniane (zazwyczaj ), na mocy tradycji wykorzystujemy tylko bazy
ortonormalne.
Iloczyn skalarny wektorów można wyrazić zarówno przez składowe kontrawariantne jak i przez kowariantne :
g ( X, Y) = gij X
i
Y
j
= Xi Y
i
= X
i
Yi = g
ij
Xi Yj
Operacje opuszczenia i podniesienia indeksu określone są również dla tensorów o bardziej złożonej strukturze.
Przykładowo podnosząc pierwszy dolny indeks tensora :
T = Ti . jkm e
j
⊗
ek
⊗
em
⊗
ei
∈
T 13 (V)
na „drugie miejsce na górze“ (zaznaczone kropką – przypis własny), otrzymamy tensor :
P = Pij . km e
k
⊗
em
⊗
ei
⊗
ej
∈
T 22 (V)
o składowych :
Pij . km = g
j
µ
T
i .
µ
km = [ tr
3
1 ( T
⊗
g*)] ijkm

13
Możemy powrócić do wejściowego tensora T opuszczając drugi górny indeks tensora P na „pierwsze miejsce na
dole“ :
Ti . jkm = g
j
µ
P
i
µ
. km = [ tr
2
2 ( g
⊗
P)]i jkm
1.4 Formy zewnętrzne. Iloczyn zewnętrzny.
1.4.1 Działanie grupy permutacji na przestrzeni form k-liniowych.
Symbolem :
S
k , k
∈
N, będziemy oznaczali zbiór wszystkich k-permutacji tj. zbiór wszystkich możliwych
bijekcji :
σ : {1, ... , k }
→
{ 1, ... , k }
Będziemy pisać sign σ = 1 , jeżeli σ będzie permutacją parzystą i sign σ =
−
1 jeśli σ będzie permutacja
nieparzystą
.
(sign – jest to tzw. funkcja znaku – przypis własny)
Jeżeli σ
∈
S
k i P – jest formą k-liniową na przestrzeni liniowej V tj. P
∈
T 0k (V ) to określona jest forma
k-liniowa σP, wartość której dla dowolnego zbioru argumentów ( Xi , ... , Xk )
∈
Vk obliczamy według
następującego wzoru :
σP ( X1 , ... , Xk ) = P( Xσ(1) , ... , Xσ(k) )
Przykładowo , jeśli P jest formą 3-liniową i σ(1) = 2 , σ(2) = 3 , σ(3) =1 to σP(X, Y, Z) = P(Y, Z, X)
Łatwo sprawdzić , że
∀
p, σ
∈
S
k ;
∀
P, Q
∈
T 0k (V ) i
∀
λ
∈
R
(p ○ σ ) P =
ρ
(σP) (1.24)
σ(P | Q) = σP | σQ (1.25)
σ (
λ
• P ) =
λ
• (σP) (1.26)
◄ Udowodnimy (1.24) pozostałe własności można udowodnić jeszcze prościej.
Niech ( X1 , ... , Xk )
∈
V , oznaczmy Ym = Xp(m) m = 1 ... k , wtedy :
(p ○ σ ) P ( X1 , ... , Xk ) = P( X
ρ
(σ(1)) , ... , X
ρ
(σ(k)) ) = P ( Yσ(1) , ... , Yσ(k) ) = σP( Yi , ... , Yk ) =
= σP( X
ρ
(1) , ... , X
ρ
(k) ) =
ρ
(σP)( X1 , ... , Xk ) . ►
1.4.2 Formy zewnętrzne i operator alternacji
Definicja. Formę k-liniową P
∈
T 0k (V ) nazywamy „zewnętrzną” (jak również „skośnie symetryczną lub
antysymetryczną), jeśli :
∀
σ
∈
S
k σP = sign σ • P (1.27)
Innymi słowy P jest antysymetryczna jeśli P zmienia znak przy permutacji dwóch dowolnych swoich
argumentów. ■
Przykładowo, forma biliniowa P jest antysymetryczna jeżeli :
∀
X, Y
∈
V P( X, Y ) =
−
P (Y, X )
Forma P , trójliniowa jest antysymetryczna jeżeli :
∀
X, Y, Z
∈
V P( X, Y, Z ) = - P (X, Z, Y) =
−
P (Y, X, Z) = P(Y, Z, X) = P(Z, X, Y) =
−
P(Z, Y, X)
Liczbę k nazywamy stopniem formy zewnętrznej P i oznaczamy symbolem : deg P.
Zewnętrzne formy k-liniowe są nazywane w skrócie „zewnętrznymi k-formami” lub po prostu k-formami.
Przykład 1. Iloczyn mieszany wektorów przestrzeni trójwymiarowej , euklidesowej, jest to zewnętrzna 3-forma
P (X, Z, Y) = g ( X, [ Y
×
Z ] ) gdzie g – jest tensorem metrycznym (euklidesowym) □
Ćwiczenie1. Udowodnić ,że jeśli P – jest zewnętrzną k-formą i wektory ( X1 , ... , Xk ) są liniowo zależne to
P( X1 , ... , Xk ) = 0
Podpowiedź : jeśli pośród X1 , ... , Xk znajdują się dwa wektory identyczne to P( X1 , ... , Xk ) = 0. Ogólny
przypadek łatwo jest wyprowadzić z tego stwierdzenia. Warto również wspomnieć , że przekształcenie liniowe
zawsze przeprowadza zero w zero.
Przykład 2. Udowodnić , że forma biliniowa P jest zewnętrzna w tym i tylko w tym przypadku kiedy :
∀
X
∈
V P( X, X ) = 0
Podpowiedź : rozpisać wyrażenie P( X + Y, X + Y )

14
Zbiór wszystkich k-form zewnętrznych na przestrzeni liniowej V oznaczamy symbolem : Λk (V )
Przy czym :
def
Λ1 (V ) = T 01 (V ) = V* .
(tzn. jednoforma jest kowektorem – przypis własny)
Przykład 3. Udowodnić ,że Λk (V ) jest podprzestrzenią liniową przestrzeni T
0
k (V ).
Podpowiedź : jest to łatwe zobacz (1.27) oraz własność (1.25) i (1.26)
Definicja. Odwzorowanie : Alt : T 0k (V )
→
Λk (V )
Alt P (1/k !) Σ sign σ • σP , P
∈
T 0k (V ) (1.28)
nazywamy „operatorem alternacji“ (antysymetryzacji) ■
We współrzędnych równość (1.28) zapisuje się zwykle następująco :
Alt ( Pi1 ... ik e
i1
⊗
... eik ) P [i1 ... ik] e
i1
⊗
... eik (1.29)
wykorzystując przy tym ogólnie przyjęte oznaczenia :
P [i1 ... ik] = (1/k !) Σ sign σ Piσ(1) ... iσ(k)
Przykładowo , jeżeli P –jest formą biliniową , to ;
(Alt P ) (X, Y) = ½ [P(X, Y)
−
P(Y, X)] lub we współrzędnych :
Alt (Pij e
i
⊗
ej ) = ½ (Pij
−
Pji ) e
i
⊗
ej
Jeśli P- jest formą 3-liniową , to :
(Alt P ) (X, Y, Z) = 1/6 [P(X, Y, Z )
−
P(X, Z, Y)
−
P(Y, X, Z ) + P(Y, Z, X) + P(Z, X, Y )
−
P(Z, Y, X) ],
lub we współrzędnych :
Alt (Pijk e
i
⊗
ej
⊗
ek ) = 1/6 ( Pijk
−
Pikj
−
Pjik + Pjki + Pkij
−
Pkji ) e
i
⊗
ej
⊗
ek
Lemat 1.1 (własności operatora Alt )
1). Alt jest operatorem liniowym
2).
∀
σ
∈
S
k i
∀
P
∈
T 0k (V ) σ Alt P = Alt σ P= sign σ • Alt P
3). P
∈
Λk (V ) < = > Alt P = P
4).
∀
P
∈
T 0k (V ) i
∀
Q
∈
T 0m (V ) Alt ( Alt P
⊗
Q) = Alt ( P
⊗
Q)
◄ 1). od razu wynika z definicji (1.27) i własności (1.25) , (1.26)
2). Uwzględniając że sig (p ○ σ ) = sign
ρ
• sign σ oraz (sign σ)2 = 1, jak również przyjmując do wiadomości
wzory (1.24) – (1.26) , otrzymujemy :
σ Alt P =σ (1/k!) Σsign
ρ
•
ρ
P = (1/k!) Σsign
ρ
• σ(
ρ
P) = sign σ • (1/k!) Σsign (σ ○
ρ
) • (σ ○
ρ
)P = sign σ • Alt P
ρ∈
S
k
ρ∈
S
k
ρ∈
S
k
ponieważ {σ ○
ρ
|
ρ∈
S
k } =
S
k . Równość : Alt σP = sign σ • Alt P można udowodnić w analogiczny sposób.
3). Jeśli P – jest formą zewnętrzną , to
∀
σ
∈
Sk sign σ • σ P = P i :
Alt P = (1/k!) Σ sign σ • σP = (1/k!) Σ P = (k!/k!) P = P
ρ∈
S
k
ρ∈
S
k
Odwrotna implikacja wynika w oczywisty sposób z punktu 2).
4). Dla każdej k-permutacji σ oznaczymy przez σ’ następującą (k + m) permutacje :
σ’(1) = σ’(1) , ... ,σ’(k) = σ(k), σ’(k + 1)= k +1 ... σ’(k + m) = k + m
Łatwo zauważyć ,że sign σ’ = sign σ i σP
⊗
Q = σ’(P
⊗
Q). Teraz z uwzględnieniem punktów 1). i 2). mamy :
Alt (Alt P
⊗
Q) = Alt {[(1/k!)Σsign σ • σP]
⊗
Q }= Alt [(1/k!) Σ sign σ • (σP
⊗
Q )] = (1/k!)Σsign σ • Alt σ’
ρ∈
S
k
ρ∈
S
k
ρ∈
S
k
(P
⊗
Q) = (1/k!) Σ(sign σ )2 • Alt (P
⊗
Q ) = Alt ( P
⊗
Q )
ρ∈
S
k

15
Równość : Alt (P
⊗
Alt Q ) = Alt ( P
⊗
Q ) można udowodnić analogicznie. ►
1.4.3 Operacja iloczynu zewnętrznego
Definicja. Iloczynem zewnętrznym form wieloliniowych P
∈
T 0k (V ) i Q
∈
T 0m (V ) nazywamy formę
zewnętrzną :
P
∧
Q
∈
Λk + m (V ) która jest zdefiniowana następująco :
P
∧
Q = [(k + m) ! / k! m!] Alt (P
⊗
Q) ■ (1.30)
(przyjęto również iloczyn zewnętrzny nazywać iloczynem klinowym – od symbolu iloczynu
∧
- przypis własny )
Lemat 1.2 (własności iloczynu zewnętrznego)
1). Odwzorowanie
∧
: T 0k (V )
×
T 0m (V )
→
Λk + m (V ) jest biliniowe tj. iloczyn zewnętrzny jest
przemienne względem dodawania :
R
∧
( P + Q) = R
∧
P + R
∧
Q i (P + Q)
∧
R = P
∧
R + Q
∧
R
2). P
∧
Q = Alt (P)
∧
Q = P
∧
(Alt Q)
3). P
∧
Q = (-1)km Q
∧
P , gdzie k = deg P , m = deg Q
4). P
∧
( Q
∧
R ) = (P
∧
Q )
∧
R = [(k + m +n) / k! m! n! ] Alt (P
⊗
Q
⊗
R);
gdzie: k= deg P, m= deg Q , n =deg R
◄ 1). Jest oczywiste , ponieważ odwzorowanie
⊗
: T 0k (V )
×
T 0m (V )
→
T k + m (V ) jest biliniowe a
odwzorowanie Alt : T 0k + m (V )
→
Λk + m (V ) jest liniowe.
2). Bezpośrednio wynika z punktu 4 lematu 1.1
3). Rozpatrzmy następującą (k + m) permutacje σ :
σ(1)= k + 1, ... , σ (m) = k +m , σ (m +1) = 1, ..., σ(m+k) = k
Zauważamy, że P
⊗
Q = σ (Q
⊗
P ) i sign σ = (-1)km . Na mocy punktu 2 poprzedniego lematu.
Alt (P
⊗
Q ) = Alt σ (Q
⊗
P ) = sign σ • Alt (Q
⊗
P ) = (-1)km Alt (Q
⊗
P )
a równość : Alt (P
⊗
Q ) = (-1)km Alt (Q
⊗
P ) jest równoważna równości dowodzonej.
4). Wykorzystując definicję iloczynu zewnętrznego , punkty 1, 4 lematu 1.1 i łączność iloczynu tensorowego ,
otrzymujemy :
P
∧
( Q
∧
R ) = [(k + m + n)!/k!(m!+ n!)] Alt [ P
⊗
( Q
∧
R)] = [(k + m + n)! / k!(m!+ n!)]
Alt { P
⊗
[ (m + n ) ! / m! n!] Alt ( Q
⊗
R )} = [(k + m + n)! / k! m! n! ] Alt [ P
⊗
Alt (Q
⊗
R )] =
= [(k + m + n)! / k! m! n! ] Alt ( (P
⊗
Q
⊗
R)
W sposób analogiczny możemy sprawdzić równość :
(P
∧
Q )
∧
R = [(k + m +n) / k! m! n! ] Alt (P
⊗
Q
⊗
R). ►
Ponieważ iloczyn zewnętrzny jest łączny (punkt 4 lematu 1.2) to w wyrażeniach postaci : P1
∧
, ... ,
∧
Ps nie
trzeba wstawiać nawiasów. Indukcyjnie możemy wnioskować , że :
P1
∧
...
∧
Ps = [(k1 + ... + ks)! k1!... ks! ] Alt ( P
1
⊗
...
⊗
Ps ) gdzie ki = deg P
1 ; i = 1... s
Przykłady.
1. Dla dowolnych ω1... ωk
∈
V* i X1 ... Xk
∈
V
(ω1
∧
...
∧
ωk ) (X1 ... Xk ) = | ω1( X1 ) ... ω1(Xk) | (1.31)
| ....... ............ |
| ωk( X1 ) ... ω
k(X
k) |
◄(ω1
∧
...
∧
ωk ) = k! Alt (ω1
⊗
...
⊗
ωk ) = Σ sign σ • σ (ω1
⊗
...
⊗
ωk )
σ
∈
S
k
Jednak : σ (ω1
⊗
...
⊗
ωk ) (X1 ... Xk ) = ω1( Xσ(1) ) ... ωk(Xσ(k) )
zatem pozostaje jedynie wykorzystać definicję wyznacznika. ►

16
Ćwiczenie*. Za pomocą wzoru (1.31) łatwo udowodnić następujące twierdzenie :
1-formy ω1... ωk
∈
V* są liniowo niezależne w tym i tylko w tym przypadku jeśli : (ω1
∧
...
∧
ωk ) = 0
2. Jeśli {ei}
n
i = 1 i {e
i}n
i = 1 – jest para baz dualnych , to :
(e1
∧
...
∧
ek ) ( e1 ...ek ) = 1 (1.32)
lub ei(ej) =
δ
i
j
3. Na mocy punktu 3 lematu 1.2 :
∀
ω, η
∈
V* ω
∧
η = - η
∧
ω – W szczególności : ω
∧
ω = 0 □
1.4.4 Baza przestrzeni k-form zewnętrznych
Twierdzenie 1.2 Niech {ei}
n
i = 1 będzie pewną bazą w przestrzeni V a {e
i}n
i = 1 – będzie bazą do niej dualną.
1). Przy 1 ≤ k ≤ n zbiór k-form zewnętrznych
{ ei1
∧
...
∧
eik | 1 ≤ i1 < ... < ik ≤ n } (1.33)
jest bazą przestrzeni Λk (V ) . W szczególności
dim Λk (V ) = C
n
k = n! /(n – k)! k!
2). Dla dowolnej k-formy zewnętrznej P ( 1 ≤ k ≤ n )
P = Σ Pi1..ik • e
i1
∧
...
∧
eik , gdzie Pi1..ik = P( e1 , ..., ek ) (1.34)
i1 < ... < ik
3). Przy k > n Λk (V ) = {0}
◄ Niech P
∈
Λk (V ). Stosując działanie alternowania do obu części równości:
P = Pi1..ik e
i1
⊗
...
⊗
eik , gdzie Pi1..ik = P( e1 , ..., ek )
otrzymamy (zobacz punkt 1.3 lematu 1.1) :
P = Alt P = Pi1..ik • Alt (e
i1
⊗
...
⊗
eik ) = (1/k!) • Pi1..ik • k!Alt (e
i1
⊗
...
⊗
eik )
Jednak : k!Alt (ei1
⊗
...
⊗
eik ) = ei1
∧
...
∧
eik , a zatem :
P = (1/k!) Pi1..ik e
i1
∧
...
∧
eik (1.35)
Przeanalizujmy sumę w prawej części (1.35). Po pierwsze składowe w których pośród indeksów i1 ... ik są
indeksy zgodne są równe zeru. (zobacz punkt 3 ostatniego przykładu). Dlatego nie będziemy ich uwzględniać w
naszych obliczeniach. Dalej, przy permutacji dwóch sąsiednich indeksów przykładowo im i im+1, każda
składowa Pi1..ik zmienia znak (ponieważ P – jest formą zewnętrzną). Oprócz tego , przy permutacji dwóch
sąsiednich czynników przykładowo eim i eim+1 iloczyn ei1
∧
...
∧
eik również zmienia znak (zobacz punkt 3
poprzedniego przykładu). Zatem każda składowa w (1.35) nie zmienia się przy permutacji dowolnych dwóch
sąsiednich indeksów, zatem i przy dowolnej permutacji indeksów i1 , ... , ik. W takim razie składowe sumy
(1.35) które różnią się tylko porządkiem rozłożenia indeksów i1 , ... , ik, są zgodne. Każda grupa jednakowych
składowych składa się z dokładnie k! członów. Zgrupujmy w (1.35) identyczne składowe , biorąc z każdej grupy
jednakowych składowych po jednym reprezentancie tj. takie składowe w których i1 < ...< ik. Wtedy równość
(1.35) przyjmie postać (1.34).
Jeśli k > n to na mocy (1.35) dowolna k-forma zewnętrzna jest zerowa albo pośród indeksów i1 ... ik
obowiązkowo znajdują się dwa jednakowe. Dlatego dalej będziemy rozpatrywać tylko przypadek k ≤ n.
Udowodnimy liniową niezależność układu (1.33). Niech pewna liniowa kombinacja tych form zewnętrznych
będzie równa zeru :
Σ
λ
i1...ik • e
i1
∧
...
∧
eik = 0 ;
λ
...
∈
R. (1.36)
i1<...<ik

17
Zgodnie (1.31) wartość k-formy ei1
∧
...
∧
eik na zbiorze wektorów (ej1 , ..., ejk ), gdzie j1 < ... < jk, jest równa
wyznacznikowi macierzy :
( ei1( ej1 )... e
i1( e
jk ) ) (
δ
i1
j1 ...
δ
i1
jk )
( .................................. ) = ( ....................... )
( eik( ej1 )... e
ik( e
jk ) ) (
δ
ik
j1 ...
δ
ik
jk )
Jeżeli (i1, ... ,ik) = (j1, ... ,jk) to wyznacznik tej macierzy jest równy 1, (ponieważ macierz jest jednostkowa).
Jeśli (ik, ... ,ik) ≠ (j1 , ... ,jk) to wśród indeksów (i1, ... ,ik) znajduje się co najmniej jeden indeks im który nie
występuje w zbiorze (j1 , ..., jk). Wtedy m-ty wiersz wskazanej macierzy składa się z zer i jej wyznacznik jest
równy zeru. Z tego co powiedzieliśmy wynika , że wartość lewej części (1.36) na zbiorze wektorów
(ej1 , ..., ejk ), jest równa
λ
j1 ... jk tj.
λ
j1 ... jk = 0 ►
Wniosek. Jeśli dim V = n , to dim Λk (V ) = 1 i każda zewnętrzna n-forma Ω na V ma postać :
Ω = ω • e1
∧
...
∧
en , gdzie ω = Ω(e1 , ..., en ) (1.37)
Przy zmianie bazy e’j = A
i
j ei przestrzeni V współczynnik ω przekształca się według prawa :
ω’ = det A • ω , gdzie A = (Aij )ni,j = 1 (1.38)
◄ Zgodnie (1.13) ω’ = Ω(e’1 , ..., e’n ) = Ai11... Ainn ) • Ω(ei1 , ..., ein ). Ponieważ Ω jest formą zewnętrzną to
składowe z powyższej sumy w których pośród indeksów i1 ... in są jednakowe , jest równa zeru. Dlatego dana
suma jest równa :
Σ
Aσ(1)1... A
σ(n)
n • Ω(eσ(1) , ..., eσ(n) ) =
Σ
Aσ(1)1... A
σ(n)
n • sign σ • Ω(e1 , ..., en ) = det A • ω ►
σ
∈
Sn σ
∈
Sn
Wzór (1.37) pokazuje , że jeśli Ω – jest niezerową zewnętrzna n-formą na V a { ei }
n
i = 1 – jest pewną dowolną
bazą V to Ω(e1, ..., en ) ≠ 0.
Wprowadzimy wygodne oznaczenia tj. symbole Levi-Civity (Tulio Levi-Civita (1837-1941) – włoski
matematyk i mechanik (teoretyk)) :
ε
i1 ... in ; i1 , ... , in
∈
(1 , ... , n }
ε
i1 ... in = { 0 jeśli pośród indeksów i1 ... in są jednakowe
{ sign ( 1 ... n ) w przeciwnym przypadku
(i1 ... in)
Jest jasne (zobacz (1.31)), że jeśli { ei }
n
i = 1 i { e
i
}
n
i = 1 jest parą baz dualnych to :
ε
i1 ... in = ( e
1
∧
...
∧
en ) (ei1 , ..., ein ) (1.39)
◄ Jeśli ( i1 ... in) = (1... n) to lewa część (1.39) jest równa 1 zgodnie z definicją symboli Levi-Civity, a prawa
część jest równa wyznacznikowi macierzy jednostkowej. Jeśli zbiór (i1 ... in ) otrzymano z (1 ... n ) drogą
permutacji to lewa część (1.39) jest równa znakowi tej permutacji, a prawa jest równa wyznacznikowi macierzy
która otrzymana jest z macierzy jednostkowej droga takiej samej permutacji kolumn. W końcu, jeśli pośród
indeksów (i1 ... in ) są jednakowe to lewa część (1.39) jest równa 0 z definicji symboli Levi–Civity, a prawa jest
równa wyznacznikowi macierzy w której są takie same kolumny. ►
Z (1.37) i (1.39) wynika, że :
Ω(e1, ..., en ) = ω • (e
1
∧
...
∧
en ) (ei1 , ..., ein ) = ω •
ε
i1 ... in
gdzie ω = Ω(e1, ..., en ). Zatem rozkład zewnętrznej n-formy Ω względem bazowych n-liniowych form
ei1
⊗
...
⊗
ein ma postać :
Ω = ω •
ε
i1 ... in • e
i1
⊗
...
⊗
ein ω = Ω(e1, ..., en ) (1.40)
Uwaga. Zupełnie analogicznie tak jak określiliśmy przestrzeń liniową :
Λk (V )
⊂
T0k (V )
możemy określić przestrzeń liniową :

18
Λk (V )
⊂
Tk0 (V )
elementy której nazywamy k-wektorami (na V) i reprezentują sobą antysymetryczne tensory z przestrzeni
Tk0 (V ). Operator alternowania i iloczyn zewnętrzny dla tensorów przestrzeni T
k
0 (V ) definiowane są
dokładnie tak samo jak dla przestrzeni tensorowej T0k (V ). Wszystkie definicje wnioski są zupełnie
analogiczne. Istnieje oczywiście naturalna różnica we wzorach : wszystkie indeksy górne zamieniamy na dolne i
odwrotnie. Łatwo zauważyć , że :
Λk (V ) =Λk (V* )
Jeśli { ei }
n
i = 1 jest pewna bazą przestrzeni V, to zbiór k-wektorów :
{ ei1
∧
...
∧
eik | 1
≤
i1 < ... < ik
≤
n } (1.41)
stanowi bazę przestrzeni Λk (V ) . Rozkład k-wektora T
∈
Λk (V ) względem tej bazy ma postać :
T =
Σ
Ti1 ... ik • ei1
∧
...
∧
eik , gdzie : T
i1 ... ik = T( ei1, ... ,eik ) (1.42)
i1< ...<ik
tutaj { ei1, ... ,eik } – jest bazą sprzężoną do {e1, ... ,en }
Każdy n-wektor
Ψ
na V ma postać ( n = dim V) :
Ψ
=
ψ
• e1
∧
...
∧
en , gdzie
ψ
=
Ψ
( e1, ... ,en ) (1.43)
Przy zmianie bazy e’j = A
i
j ei przestrzeni V współczynnik
ψ
przekształca się według prawa :
ψ
’ = (1/det A) •
ψ
, gdzie A = ( Aij )
n
i,j = 1 (1.44)
1.5 Orientacja. Forma objętości. Operator Hodge’a
1.5.1 Orientacja przestrzeni liniowej. Forma objętości
Każda niezerowa zewnętrzna n-forma
Ω
na n-wymiarowej przestrzeni liniowej V rozbija zbiór wszystkich baz
przestrzeni V na dwie klasy :
- bazy { ei }
n
i = 1 dla których
Ω
( e1, ... ,en ) > 0
- bazy { ei }
n
i = 1 dla których
Ω
( e1, ... ,en ) < 0
Klasy te nie zależą od konkretnego wyboru formy
Ω
; jeśli
Ω
,
Ω
’
∈
Λn (V ) / {0} to istnieje liczba
λ
≠ 0 taka, że
Ω
’ =
λ
•
Ω
. To znaczy , że jeśli
Ω
przyjmuje na dowolnych dwóch bazach wartości o jednakowych znakach to i
Ω
’ będzie miała na tych bazach jeden i ten sam znak zatem obie bazy znajdą się w tej samej klasie.
Definicja. Zadać na przestrzeni liniowej V orientacje – to znaczy wybrać jedną z dwóch wymienionych klas
baz. Przy tym bazy z wybranej klasy nazywają się „dodatnio zorientowanymi” , bazy drugiej klasy nazywają się
„ujemnie zorientowanymi” O bazach z jednakowej klasy mówimy jako o jednakowo zorientowanych.
Przestrzeń V nazywamy „zorientowaną” jeśli wybrana (i ustalona) jest w niej jedna z dwóch możliwych
orientacji. Niezerowa n-forma
Ω
nazywa się „zorientowaną” , jeśli
Ω
( e1, ... ,en ) > 0 dla dowolnej bazy
zorientowanej { ei }
n
i = 1 ■
Przestrzeń afiniczna nazywamy zorientowaną jeśli wybrano orientacje w stowarzyszonej z nią przestrzeni
wektorowej.
Ćwiczenie. Niech bazę { e’1, ... ,e’n } otrzymano przez zmianę numerów wektorów bazy { e1, ... ,en } tj.
znajdzie się taka n-permutacja σ , że :
e’1
−
eσ(i) , i = 1...n
Udowodnijcie, że te bazy zadają jednakową orientacje w tym i tylko w tym przypadku , jeżeli signσ = 1
(podpowiedź : jeśli
Ω
jest n-formą , to
Ω
( e’1, ... ,e’n ) = (σ
Ω
) ( e1, ... ,en ) zobacz również (1.27))
Definicja. Formą objętości na n-wymiarowej przestrzeni liniowej V nazywamy dowolną niezerową formę
Ω
∈
Λn (V ) Przy tym liczbę
Ω
( X1, ... ,Xn ) , X1, ... ,Xn
∈
V nazywamy „objętością zorientowaną”
n-wymiarowego równoległoboku rozpiętego na wektorach X1, ... ,Xn ■
Jeśli { ei }
n
i = 1 - jest bazą V i Xj = X
i
j ei , j= 1 ... n , to na mocy (1.37) i (1.31) :

19
| X11, .. , X
1
n |
Ω
( X1, ... ,Xn ) =
Ω
( e1, ... ,en ) • | ............ ........ | (1.45)
| Xn1, .. , X
n
n |
(porównaj ze wzorem dla iloczynu mieszanego wektorów ). Z tego wzoru wynika, że jeśli wektory :
X1, ... ,Xn
∈
V są liniowo zależne to zorientowana objętość jest równa zeru (co jest w pełni zrozumiałe).
W przypadku kiedy wektory te są liniowo nie zależne, zorientowana objętość jest dodatnia – jeżeli forma
Ω
i
baza { ei }
n
i = 1 są jednakowo zorientowane i ujemna w przypadku przeciwnym.
Ćwiczenie Udowodnić za pomocą wzoru (1.45) następujące twierdzenie :
Dwie bazy przestrzeni liniowej są jednakowo zorientowane wtedy i tylko wtedy jeżeli macierz przejścia od
jednej z tych baz do drugiej ma dodatni wyznacznik.
Uwaga. W celu zadania orientacji na skończenie wymiarowej przestrzeni wektorowej V wystarczy zadać na V
jakąkolwiek formę objętości
Ω
. Z tej przyczyny zorientowaną przestrzenią wektorową często nazywamy parę
obiektów : ( V,
Ω
)
1.5.2 Metryczna forma objętości
Na n-wymiarowej przestrzeni liniowej V istnieje nieskończenie wiele form objętości. Jeśli jednak wybierzemy
na V pewną orientacje i zadamy pewien tensor metryczny g, to pośród wszystkich form objętości wyróżnimy
tzw. „metryczną formę objętości”
Ω
g. Formę tą definiujemy następująco :
Ω
g =
√
|
γ
| e1
∧
...
∧
en
⇔
Ω
g ( e1, ... ,en ) =
√
|
γ
| (1.46)
gdzie : {ei}ni = 1 – jest bazą V*. sprzężoną do pewnej zorientowanej bazy { ei }
n
i = 1 przestrzeni V, a :
| g11, .. , g1n |
γ
= | .. .................| , gij = g( ei , ej )
| gn1, .. , gnn |
Upewnijmy się w niezależności tej definicji od wyboru zorientowanej bazy.
◄ Na mocy (1.13) przy zmianie zorientowanej bazy e’j = Aij ei , składowe tensora metrycznego g
przekształcają się według prawa :
g’km = A
i
k A
j
m gij < = > G’ = A
T G A
gdzie : G’ = (g’km )
n
k, m =1 , G = (gij )
n
i, j =1 , A = (A
i
j )
n
i, j =1.
Wynika stąd , że :
γ
‘ = (det A) 2
γ
⇔
√
|
γ
’ | = | det A |
√
|
γ
| (1.47)
Ponieważ jednak bazy { ei }
n
i = 1 i { e’j }
n
j = 1 są zorientowane jednakowo to det A > 0 (zobacz (1.45)) zatem
ostatnia równość może być zapisana następująco :
√
|
γ
| = det A
√
|
γ
|
Z drugiej strony na mocy (1.38) :
Ω
g ( e’1, ... ,e’n ) = det A
Ω
g ( e1, ... ,en ) = det A
√
|
γ
| =
√
|
γ
’ |
tj. :
Ω
g =
√
|
γ
| e’1
∧
...
∧
e’n ►
Dla formy objętości metrycznej rozkład (1.40) przepisujemy w postaci :
Ω
g =
√
|
γ
| •
ε
i1 ... in • e
i1
⊗
...
⊗
ein ,
γ
= det [ ( g( ei , ej ) )
n
i, j =1 ] (1.48)
Uwaga. Jeśli baza { e1, ... ,en } jest zorientowana ujemnie to wtedy baza { - e1, e2 , ... ,en ) jest zorientowana
dodatnio (ponieważ wyznacznik macierzy przejścia jest równy –1). Łatwo stąd wywnioskować, że w przypadku
ujemnie zorientowanej bazy wzory (1.46) i (1.48) przyjmują postać :
Ω
g =
−
√
|
γ
| e1
∧
...
∧
en =
−
√
|
γ
| •
ε
i1 ... in e
i1
⊗
...
⊗
ein (1.49)

20
1.5.3 Dualna forma objętości
Niech V – będzie rzeczywistą przestrzenią liniową o wymiarze n ,
Ω
∈
Λn (V ) – niech będzie formą objętości na V.
Rozpatrzmy formę objętości
Ω
*
∈
Λn (V* ) = Λn (V ) na przestrzeni V* , którą określimy następująco :
jeśli { ei }
n
i = 1 jest pewna bazą V , {e
i
}
n
i =1 jej bazą sprzężoną oraz :
Ω
= ω e
1
∧
...
∧
en = ω •
ε
i1 ... in e
i1
⊗
...
⊗
ein
to :
Ω
* = (1/ω) e1
∧
...
∧
en
= (1/ω) •
ε
i1 ... in e
i1
⊗
...
⊗
ein
(1.50)
(symbol Levi-Civity z indeksami górnymi
ε
i1 ... in definiujemy dokładnie tak samo jak symbol Levi-Civity z
indeksami dolnymi).
Ćwiczenie Udowodnić za pomocą wzorów (1.38) i (1.44) ,że definicja ta jest poprawna tj. nie zależy od wyboru
bazy { ei }
n
i = 1
Jeśli
Ω
g – jest metryczną formą objętości na V (odpowiadającą tensorowi metrycznemu g : V
×
V
→
R ) to jak
łatwo zauważyć :
Ω
g* =
Ω
g*
tj. dualna do
Ω
g forma objętości jest to nic innego jak metryczna forma objętości na V*, wywiedziona z
kontrawariantnego tensora metrycznego g* : V*
×
V*
→
R .
W tym przypadku (1.50) przepisujemy w postaci ( zobacz (1.46) i (1.48)) :
Ω
g* = ( 1/
√
|
γ
| ) • e1
∧
...
∧
en
= (1/
√
|
γ
| ) •
ε
i1 ... in e
i1
⊗
...
⊗
ein
(1.51)
gdzie
γ
= det [ (g( ei , ej ) )
n
i, j =1 ]
1.5.4 Operator Hodge’a (zwany również gwiazdką Hodge’a – przypis własny)
Niech V – będzie rzeczywistą przestrzenią liniową o wymiarze n i niech
Ω
∈
Λn (V ) – będzie formą
objętości na V . Ustalmy pewne k
∈
{1, ... , n} i rozpatrzmy odwzorowanie :
*
* : Λk (V )
→
Λn
−
k (V ) , T
→
*T (1.52)
przeprowadzające k-wektory w (n – k) –formy. Dla dowolnego k-wektora T
∈
Λk (V ) zewnętrzna (n- k)-forma
*T zdefiniowana jest równością :
*T = (1/k!) tr
αα
(
Ω⊗
T ) gdzie
α
= ( 1, ... ,k) (1.53)
Definicja. Odwzorowanie (1.53) nazywamy operatorem Hodge’a formy objętości lub operatorem dualizacji ■
Zapiszemy (1.53) we współrzędnych. Jeżeli { ei }
n
i = 1 jest pewna bazą V , {e
i
}
n
i =1 jej bazą sprzężoną to :
T = Ti1 ...ik ei1
⊗
...
⊗
ein
,
Ω
= ω •
ε
i1 ... in e
i1
⊗
...
⊗
ein
wtedy :
T = ( T) j1 ... jn-k • e
j1
⊗
...
⊗
ejn-k , gdzie : (*T) j1 ... jn-k = (1/k!) ω •
ε
i1 ... ik j1 ... jn-k T
i1 ... ik (1.54)
Z (1.54) i antysymetryczności
ε
i1 ... ik j1 ... jn-k względem permutacji dowolnych dwóch indeksów wynika, że
*T – jest antysymetryczną (n
−
k )-formą.
Zupełnie analogicznie możemy rozpatrywać operator Hodge’a formy objętości
Ω
* , dualnej do
Ω
.
ego też oznaczamy znakiem * (na mocy tradycji), przeprowadza on (n
−
k )-formy w k-wektory :
* : Λn - k (V )
→
Λk (V ) , P
→
*P (1.55)
*P = (1/(n – k) !) tr
ββ
(
Ω
*
⊗
T ) (1.56)
gdzie
β
= ( 1, ... , n
−
k ).

21
We współrzędnych (1.56) zapisujemy następująco :
(*P )i1 ...ik = (1/(n – k) !)(1/ω)
ε
j1 ...jn-k i1 ... ik
Pj1 ... jn-k (1.57)
Operatory Hodge’a, to odwzorowania liniowe co wynika z liniowości operacji tr ...... i biliniowości operacji
⊗
.
Udowodnimy, że dla operatora Hodge’a (1.52) i (1.55) spełniona jest zależność :
*
°
* = (
−
1)k(n
−
k) Id
(1.58)
gdzie Id – jest operatorem tożsamościowym
Dokładniej :
∀
T
∈
Λk (V ) **T = (-1)
k(n-k) T (1.59)
∀
P
∈
Λn-k (V ) **P = (-1)
k(n-k) P (1.60)
◄ Udowodnimy (1.60), równość (1.59) można udowodnić w sposób analogiczny. Obliczenia wygodnie jest
prowadzić we współrzędnych. Niech :
Pj1 ... jn
−
k e
j1
⊗
...
⊗
ejn
−
k = P
∈
Λn
−
k (V )
Wybierzemy zbiór indeksów (j1 ... jn
−
k) w ten sposób aby pośród nich nie było dwóch powtarzających się.
Z pomocą (1.57) i (1.54) zapiszemy :
(**P)j1 ...jn
−
k = (1/k!) ω
ε
i1... ik j1 ... jn
−
k (*P)
i1 ... ik = (1/(n – k) !)
ε
i1... ik j1 ... jn
−
k
ε
m1 ... mn-k i1 ... ik
Pm1... mn-k = [(-1)
k(n
−
k) / k! (n – k)!]
ε
i1... ik j1 ... jn
−
k
ε
i1 ... ik m1 ... mn-k P
m1... mn
−
k
Ostatnią równość otrzymano następująco :
należy przestawić każdy z k indeksów i1 ... ik z każdym z (n
−
k) indeksów m1 ... mn
−
k co daje k mnożników
(-1)(n
−
k) . W ten sposób otrzymamy :
(**P)j1 ...jn
−
k = [(-1)
k(n
−
k) / k! (n – k)!]
ε
i1... ik j1 ... jn
−
k
ε
i1 ... ikm1 .. mn-k P
m1... mn
−
k (1.61)
W sumie z prawej części (1.61) należy pozostawić tylko te składowe dla których :
1). i1 ... ik
∈
{1 , ... , n } / {j1 ... jn
−
k }
2). pośród indeksów i1 ... ik nie ma dwóch jednakowych
(pozostałe składowe są zerowe). Składowych spełniających warunki 1) , 2) jest k! i wszystkie one są równe
jedne drugim (ponieważ przy permutacji dowolnych dwóch indeksów ze zbioru (i1 ... ik ) mnożniki :
ε
i1... ik j1 ... jn
−
k
ε
i1 ... ikm1 .. mn
−
k zmieniają znak.
Ustalmy zbiór indeksów (i1 ... ik ) spełniający warunki 1) , 2) i zapiszmy (1.61) w postaci :
(**P)j1 ...jn
−
k = [(-1)
k(n
−
k) / (n – k)!]
ε
i1... ik j1 ... jn
−
k
ε
i1 ... ikm1 .. mn
−
k P
m1... mn
−
k (1.62)
(tutaj sumowanie prowadzimy tylko względem indeksów m1, ... , mn
−
k ).
W sumie z prawej strony (1.62) różne od zera są tylko te składowe dla których :
3). m1, ... , mn-k
∈
{1 , ... , n } / {i1 ... ik }
4). pośród indeksów m1, ... , mn
−
k nie ma dwóch jednakowych
Składowych spełniających warunki 3), 4) jest (n – k )! i wszystkie one są równe jeden drugiemu.
W charakterze (m1, ... , mn-k ) spełniających warunki 3) , 4) weźmiemy zbiór (j1, ... , jn-k ) i zapiszemy
(1.62) w postaci :
(**P)j1 ...jn
−
k = (-1)
k(n
−
k)
ε
i1... ik j1 ... jn
−
k
ε
i1 ... ikj1 .. jn
−
k P
j1... jn
−
k (1.63)
(tutaj nie stosujemy umowy sumacyjnej) Jednak jak łatwo zauważyć dla dowolnej permutacji (a1, ... , an )
indeksów (1, ... ,n ):
ε
a1... an
ε
a1 ... an = 1 (nie sumujemy względem indeksów a
1, ... , an )
Z udziałem ostatniej uwagi (1.63) przepiszemy do postaci :
(**P)j1 ...jn
−
k = (-1)
k(n
−
k) P
j1... jn
−
k
a to jest to co chcieliśmy udowodnić. ►

22
Uwaga. Z (1.58) wynika, że operatory Hodge’a są izomorficzne. Zauważmy, że przy nieparzystych n, mnożnik
(-1)k(n
−
k) jest zawsze równy +1, dlatego przy nieparzystych n operatory Hodge’a (1.52) i (1.55) są wzajemnie
odwrotne.
Ćwiczenie. Niech ( V, g) – jest n wymiarową zorientowaną (pseudo)euklidesową przestrzenią.
G : V
→
V* - izomorfizmem kanonicznym (1.20),
Ω
g - jest metryczna formą objętości (tensora metrycznego g ),
* - jest operatorem Hodge’a formy objętości
Ω
g .
Udowodnić , że dla dowolnych X, Y
∈
V :
(*X)
∧
G (Y) = (-1)k(n
−
k) g (X, Y)
Ω
g (1.64)
1.5.5 Iloczyn wektorowy
Dla wektorów trójwymiarowej zorientowanej przestrzeni euklidesowej (V, g) określona jest operacja (działanie)
[ .
×
. ] : V
×
V
→
V zwane „iloczynem wektorowym”.
[ X
×
Y ] = * (G (X)
∧
G (Y)) , X, Y
∈
V (1.65)
we wzorze tym * : Λ2 (V )
→
Λ1 (V ) = V jest operatorem Hodge’a formy objętości
Ω
*g , a :
G : V
→
V*
jest izomorfizmem kanonicznym (1.20).
Wybierzemy dowolną bazę { e1, e2
, e
3 } przestrzeni V i wyrazimy składowe iloczynu [ X
×
Y ] przez składowe
składników tego iloczynu : X , Y w tej bazie. Niech : X = Xi ei , Y = Y
j e
j , wtedy :
G(X) = Xi e
i
, X
i = g
imX
m , G(Y) = Y
je
j
, Y
i = g
jmY
m i
G(X)
∧
G(Y) = 2! Alt ( G(X)
⊗
G(Y)) = 2! Alt ( Xi Yj e
i
⊗
ej ) = 2! (1/2!)( Xi Yj
−
Xj Yi ) e
i
⊗
ej =
= ( Xi Yj
−
Xj Yi ) e
i
⊗
ej ,
* (G(X)
∧
G(Y) = (1/2!) (
ε
ijk
/
±
√γ
) ( Xi Yj
−
Xj Yi ) ek .
Zauważmy , że :
ε
ijk
( Xi Yj
−
Xj Yi ) =
ε
ijk
Xi Yj
−
ε
ijk
Xj Yi =
ε
ijk
Xi Yj +
ε
jik
Xj Yi =
ε
ijk
Xi Yj +
ε
ijk
Xi Yj =
= 2
ε
ijk
Xi Yj dlatego :
* (G(X)
∧
G(Y)) =
±
( 1/
√γ
) Xi Yj ek .
Zatem rozkład iloczynu wektorowego względem bazy { e1, e2
, e
3 }ma postać :
| e1, e2
, e
3 |
[ X
×
Y ] =
±
(
ε
ijk
/
√γ
)Xi Yj ek =
±
( 1/
√γ
) |X1, X2 , X3 | (1.66)
|Y1, Y2 , Y3 |
gdzie Xi i Yj - są współrzędnymi kowariantnymi wektorów X, Y w bazie { e1, e2
, e
3 },
γ
- wyznacznik macierzy Grama bazy { e1, e2
, e
3 } , znak „+” – odpowiada dodatniemu zorientowaniu bazy ,
znak ‘-‘ – ujemnemu zorientowaniu.
Jeśli { e1, e2
, e
3 } – jest zorientowaną ortonormalną bazą , to
γ
= 1 i wybieramy znak „+” i wzór (1.66)
przybiera dobrze znaną postać.
Uwaga. Do tej pory wszędzie pisaliśmy
√γ
zamiast
√
|
γ
|, ponieważ g - jest euklidesowym tensorem
metrycznym zatem w bazie ortonormalnej
γ
= 1, a jak wiadomo z (1.47) znak
γ
od wyboru bazy nie zależy.
23
Ćwiczenie.
1). Wyprowadzić z (1.66) wzór :
[ X
×
Y ] =
±
sqrt (
γ
) gkm
ε
ijm X
i Yj
ek (1.67)
(tj. wzór na iloczyn wektorowy wyrażony przez składowe kontrawariantne wektorów)
2). Sprawdzić obliczając we współrzędnych , że :
∀
X, Y
∈
V G-1 ( * ( X
∧
Y )) =
±
√γ
gkm
ε
ijm X
i Yj
ek
Zatem z udziałem (1.67) istnieją dwie równoważne definicje iloczynu wektorowego :
[ X
×
Y ] = * (G (X)
∧
G (Y) ) = G-1 ( * ( X
∧
Y )) (1.68)
1.6 Zastosowanie 1. Tensor bezwładności
1.6.1 Tensor bezwładności ciała absolutnie sztywnego
Rozpatrzymy absolutnie sztywne ciało , które obraca się dokoła pewnego swojego punktu O i zajmuje objętość
D w układzie odniesienia V, sztywno związanym z rozpatrywanym ciałem. Z formalno-matematycznego punktu
widzenia układ odniesienia V – jest to po prostu pewna zorientowana trójwymiarowa przestrzeń Euklidesa.
Poglądowo przestrzeń V zawiera wektory wodzące o początku w punkcie O łączące wszystkie punkty
rozpatrywanego ciała sztywnego.
Niech w pewnej ustalonej chwili czasu t ciało ma prędkość kątową
ω. Zauważmy ,że ω
∈
V tj. rozpatrujemy
prędkość kątową „w ciele” a nie w zewnętrznym inercjalnym układzie odniesienia.
Rozpatrzmy „nieskończenie mały” element ciała sztywnego o masie dm i wektorze wodzącym r. Jego prędkość
liniowa v i moment pędu p są równe :
v = [
ω
×
r ] , p = dm v = [
ω
×
r ]dm
Odpowiednio zatem moment bezwładności rozpatrywanego elementu jest równy :
[ r
×
p ]
−
[ r
×
[
ω
×
r ]dm
Moment bezwładności : J = J(
ω) całego ciała otrzymujemy sumując momenty bezwładności wszystkich
nieskończenie małych elementów tj. :
J(
ω) =
∫
[ r
×
[
ω
×
r ] ] dm (1.69)
D
gdzie : dm =
ρ
(r) • (element objętości), a funkcja
ρ
: D
→
R jest gęstością rozkładu masy ( w ciele sztywnym).
Nie rozpatrujemy i nie rozpisujemy elementu objętości ponieważ w różnych współrzędnych jest on zapisywany
różnie. Przykładowo , we współrzędnych kartezjańskich : x1 , x2 , x
3 element objętości ma postać :
d3r = dx1dx2 dx
3 .
Naturalnie, jeśli ciało sztywne charakteryzuje się tylko rozkładem powierzchniowym masy ( lub nawet liniowym
rozkładem masy) należy zamienić odpowiednio element objętości na element różniczki powierzchni (lub
element liniowy ) rozkładu masy.
Jeśli ciało składa się ze skończonej ilości punktów (model dyskretny) o masach : m1, ... , mN , to (1.69)
zamieniamy na :
N
J(
ω) = ∑ mk [ rk
×
[
ω
×
rk ] ] dm (1.70)
k=1
gdzie rk - promień wodzący k-tego punktu ciała.
Z (1.69), (1.70) widać, że J zależy od
ω w sposób liniowy. Innymi słowy określiliśmy operator liniowy :
J : V
→
V ,
ω
→
J(
ω)
zadający moment bezwładności ciała sztywnego jako funkcje jego prędkości kątowej.
Ten liniowy operator nazywa się „operatorem (lub tensorem) bezwładności” rozpatrywanego ciała absolutnie
sztywnego. Pod tensorem bezwładności rozumiemy (1.1)-tensor stowarzyszony z operatorem bezwładności
(zobacz (1.12))

24
1.6.2 Obliczenie tensora bezwładności we współrzędnych
Wykorzystując znaną tożsamość :
[ a
×
[ b
×
c ]] = b • < a , c >
−
c • < a , b >
(przez < . , . > oznaczyliśmy iloczyn skalarny), zapiszemy (1.69) w postaci :
J(
ω) =
∫
(
ω • r2
−
<
ω , r > • r ) dm = Ipol • ω – A(ω) (1.71)
D
gdzie : r2 = < r , r > , Ipol =
∫
r2 dm – osiowy moment bezwładności ciała (względem punktu O)
D
A(
ω) =
∫
<
ω , r > • r dm
Niech x = (x1 , x2 , x
3 ) – są kartezjańskimi współrzędnymi w V , wersory bazy { e
1, e2
, e
3 } będziemy
uważać za odłożone od punktu O. Wtedy :
r = x1e1 + x
2 e
2
+ x3 e
3 , r
2
= (x
1)2 + (x2)2 + (x3)2 , dm =
ρ
(x) dx1dx2dx3
Obliczymy składowe Jab macierzy operatora bezwładności w bazie { e1, e2
, e
3 } lub , co na jedno wychodzi,
składowe tensora bezwładności w tej bazie :
J(eb) = J
a
b ea
Z pomocą (1.71) znajdujemy :
J(eb) = Ipol (eb) – A(eb) = Ipol
δ
a
b ea
−
∫
< eb , r > r dm = Ipol
δ
a
b ea
−
∫
xb rdm = Ipol
δ
a
b ea
−
∫
xbx
a e
a dm
D D D
= ( Ipol
δ
a
b ea
−
∫
xb x
a ) e
a
D
Zatem szukane wyrażenie dla Jab ma postać :
Jab =
δ
a
b
∫
r2 (x) •
ρ
(x) • dx1dx2dx3
−
∫
xb • x
a
•
ρ
(x) • dx1dx2dx3 (1.72)
gdzie :
r2 (x) = (x
1)2 + (x2)2 + (x3)2
Zauważmy również , że xb =
δ
bax
a = xb ; b = 1, 2, 3 ze względu na to, że baza { e
1, e2
, e
3 } jest kartezjańska.
Dla przypadku modelu dyskretnego (zobacz (1.70) ) , wzór (1.72) przyjmuje postać :
N
Jab = ∑ (
δ
a
b r
2
k – xk b x
a
k ) mk (1.73)
k=1
Zauważmy, że przy a
≠
b :
N
Jab =
−
∫
xbx
a
dm ; J
a
b =
−
∑ xk b x
a
k mk
D k =1
W tym przypadku wielkość - Jab nazywa się „głównym momentem bezwładności” ciała względem osi Ox
c
gdzie c
≠
a , c
≠
b . Przy a = b mamy :
N
Jab =
∫
( (xb)2 + (x
c)2
)dm ; J
a
b =
−
∑ ( (xbk
)2
+ (x
c
k
)2
)mk
D k=1
gdzie : b
≠
a , c
≠
a . Wielkość tą nazywamy „osiowym momentem bezwładności” ciała (względem osi Oxc )

25
2. Pola wektorowe i tensorowe w przestrzeni afinicznej
2.1 „Wycieczka” w analizę
Przypomnimy (i w szczególności udowodnimy) pewne , konieczne dla dalszego wykładu fakty z kursu analizy
matematycznej. W pierwszej kolejności wprowadzimy wygodne
Oznaczenia. Niech P – będzie przestrzenia afiniczną stowarzyszoną z przestrzenią wektorową V, wtedy :
jeśli p, q
∈
P , to przez q – p oznaczymy wektor pq→
∈
V .
jeśli p
∈
P a r
∈
V , to przez p + r oznaczymy punkt q
∈
P , taki że r = pq→ (tj. p + r jest końcem wektora r
odłożonego od punktu p )
2.1.1 Różniczkowalność i różniczka
Niech P1i P2 będą skończenie wymiarowymi rzeczywistymi przestrzeniami afinicznymi stowarzyszonymi z
przestrzeniami wektorowymi, odpowiednio : V1i V2 , a U
⊂
P1 niech będzie zbiorem otwartym.
Odwzorowanie F : U
→
P2 nazywamy „różniczkowalnym” w punkcie p
∈
U, jeżeli istnieje operator liniowy :
(dF)p : V1
→
V2 .
(nazywany różniczką F w punkcie p) taki że :
F(p + r) – F(p) = (dF)p ( r) + o(r) , r
→
0 (2.1)
Tutaj jak zwykle, o(r) = h(r) || r || , gdzie h(r)
→
0 przy r
→
0
(od wyboru normy || . || na V2 warunek ten nie zależy)
Wraz z oznaczeniem (dF)p stosuje się oznaczenie dF |p .
Dla przypadku P1 = R warunek różniczkowalności funkcji F w punkcie t
∈
R jest równoważny istnieniu granicy
lim [ (F(t + ∆t) – F(t) ) / ∆t ] = dF/dt
∈
V2 .
∆t
→
0
a różniczka F w punkcie t definiowana jest wzorem :
(dF)p (∆t) = (dF/dt )(∆t) ; ∆t
∈
R .
We wskazanym przypadku P1 = R często posługujemy się następująca terminologią : F – (sparametryzowana)
krzywa, dF/dt – wektor styczny do krzywej F w punkcie t (lub w punkcie F(t) )
Jeśli { e1, e2
, e
3 }- jest bazą V2 , p0
∈
P2 i :
F = p0 + F
1e
1 + ... + F
n e
n
to różniczkowalność F jest równoważna różniczkowalności wszystkich funkcji współrzędnych Fi : U - > R.
2.1.2 Geometryczny sens różniczki. Pochodna kierunkowa.
Niech funkcja F : U
→
P2 , U
⊂
P1 będzie różniczkowalna w punkcie p
∈
U. Przeprowadźmy przez punkt p
krzywą c : R
→
P1 , wychodzącą z p z prędkością v :
c (0) = p , dc/dt = v (2.2)
Okazuje się, że obraz krzywej przy odwzorowaniu F tj. krzywa F
°
c wychodzi z punktu F(p) z prędkością
(dF)p ( v) :
d/dt | t =0 F(c (t)) = (dF)c(0) (d/dt | t =0 c(t )) (2.3)
◄ Ponieważ c przechodzi przy t = 0 przez punkt p z prędkością v, to :
c(t) = p + t v + o(t) , t
→
0
Podstawiając w (2.1) t v + o(t) w miejsce r , otrzymujemy :
F(c (t)) = F(p) + (dF)p ( t v + o(t) ) + o( t v + o(t) ) = F(c(0)) + t (dF)c(0) (v) + o(t)
lub równoważnie :
[ F(c(t)) – F(c(0))] / t = (dF)c(0) ( v ) + o(t)/t
co daje (2.3) w granicy t
→
0 ►

26
Definicja Granicę (jeśli istnieje) :
lim [F(p + tv + o(t)) – F(p)] / t = d/dt | t =0 [ F(p+ t v + o (t))]
∆t
→
0
nazywamy pochodną funkcji F w kierunku wektora v w punkcie p i oznaczamy poprzez jeden z równoważnych
sposobów :
vp (F) , v(F) (p) ,
∂
F(p)/
∂
v ,
∂
F/
∂
v |p , (
∂
F/
∂
v) p ■
Wyjaśniliśmy, że różniczkowalność funkcji F w punkcie p jest warunkiem wystarczającym istnienia pochodnej
tej funkcji w tym punkcie w dowolnym kierunku v i przy tym :
vp (F) = (dF )p (v) (2.4)
Przypomnijmy podstawowe własności pochodnej w kierunku (pochodnej kierunkowej) :
( v + w )p (F) = vp (F) + wp (F) (2.5)
(const • v )p (F) = const • v p (F) (2.6)
vp (F + Ф) = vp (F) + vp (Ф) (2.7)
vp (const • F) = const • vp (F) (2.8)
vp (f •
ϕ
) = vp (f ) •
ϕ
( p) + f(p)vp (
ϕ
) (2.9)
gdzie : w, v – wektory ; F, Ф – funkcje ; f,
ϕ
- funkcje przyjmujące wartości w R.
◄ Słuszność (2.5) i (2.6) dla przypadku kiedy F jest różniczkowalna w punkcie p od razu wynika z (2.4) i z tego
,że (dF)p – jest odwzorowaniem liniowym. Własności (2.7) , (2.8) , (2.9) – są prostymi następstwami własności
pochodnej funkcji jednej zmiennej :
(
α
+
β
)’ =
α
’ +
β
’ ; (const •
α
)’ = const •
α
’ ; (
α
•
β
)’
α
’•
β
+
α
’•
β
co wynika z tego, że vp (F) definiujemy jak pochodną funkcji jednej zmiennej :
t
→
F(p + t • v + o(t))
w punkcie t =0 ►
Obliczenie różniczki funkcji złożonej spełnia zasadę :
dФ ◦ F|p = (dФ)F(p) ◦ (dF)p (2.10)
◄ Ten fakt jest prostym następstwem (2.3). W rzeczy samej ,niech v – będzie dowolnym wektorem przestrzeni
wektorowej stowarzyszonej z przestrzenią afiniczną zawierającą obszar określoności funkcji F.
Niech c –będzie krzywą w tej przestrzeni afinicznej, spełniającą warunki (2.2).
Wykorzystując (2.3) znajdujemy
dФ ◦ F|p(v) = d/dt |t = 0[ (Ф ◦ F )c(t)] = d/dt |t = 0[ (Ф(F(c(t))) = (dФ)F(p) d/dt |t = 0 [F(c(t))] =
(dФ)F(p) [ (dF)p (v)] ►
2.2 Regularne układy współrzędnych
Niech O – będzie przestrzenią afiniczną stowarzyszoną ze skończenie wymiarową rzeczywistą przestrzenią
wektorową V , dimV = n
2.2.1 Współrzędne afiniczne (prostoliniowe)
Niech { o, e1, ...
, e
n }- będzie reperem przestrzeni afinicznej P tj. bazą {e1, ...
, e
n } przestrzeni V razem z
punktem o
∈
P – zwanym „początkiem układu współrzędnych” (początkiem układu odniesienia w
rozważaniach fizycznych , chociaż należy rozważnie stosować utożsamienie tych pojęć – przypis własny)
Definicja. Afiniczny (lub prostoliniowy) układ współrzędnych odpowiadający reperowi { o, e1, ...
, e
n }, jest to
zbiór funkcji :
x = ( x1, ... , xn ) , xi : P
→
R
zdefiniowanych następująco :
xi (p) - ei (op→ ) , i = 1, ...n (2.11)
{e1, ... , en } – jest bazą V* dualną do bazy {e1, ...
, e
n } przestrzeni V.
Funkcje xi nazywamy funkcjami współrzędnościowymi reperu. Dla punktu p
∈
P zbiór liczb :
x(p) = (x1(p) , ... , xn(p) ) nazywamy „współrzędnymi punktu“ p w układzie współrzędnych x = (x1, ... , xn )■
Zauważmy ,że (2.11) jest równoważne :
27
op→ = xi(p) • ei
tj. współrzędne punktu p są to współrzędne wektora wodzącego op→ punktu p w bazie {e1, ...
, e
n }
Ćwiczenie. Udowodnić , że funkcje współrzędnościowe x1, ... , xn i x’1, ... , x’n ,dwóch dowolnych reperów
{ o, e1, ...
, e
n }i { o’, e’1, ...
, e’
n } związane są miedzy sobą równościami :
x’k – (A-1)k i x
i + x’k
0 ;k = 1 … n (2.12)
gdzie : A = (Ai k )
n
i,k =1 – jest macierzą przejścia od bazy „nie primowanej” do ‘primowanej” tj.
e’k = A
i
k ei oraz o’o
→ = x’k
0 ek .
2.2.2 Regularne układy współrzędnych
Definicja. Odwzorowanie :
F : U
→
V
dwóch otwartych zbiorów U i V skończenie wymiarowych przestrzeni afinicznych nazywamy :
„Cr-dyffeomorfizmem” (lub dyffeomorfizmem klasy Cr ), gdzie r
∈
N lub r = ∞ , jeśli :
a) F jest bijektywne
b) F jest r -razy ciągłe i różniczkowalne
c) F -1 jest ciągłe i r -razy różniczkowalne ■
Uwaga. W tradycyjnym wykładzie analizy pojęcie r ciągłego i r – razy różniczkowalnego odwzorowania
definiowane jest na wiele równoważnych sposobów. Jedną z takich możliwości (równoważną pozostałym) jest
następująca definicja :
Niech x = (x1, ... , xn ) – będzie współrzędnymi afinicznymi na U, a y = (y1, ... , yn ) – będzie współrzędnymi
afinicznymi na V. Odwzorowanie F nazywamy r –razy w sposób ciągły różniczkowalne (lub gładkim , o klasie
gładkości Cr ) jeśli odwzorowanie : y ◦ F ◦ x-1posiada wszystkie ciągłe pochodne cząstkowe do rzędu r
włącznie. Mówiąc prościej , odwzorowanie jest r razy różniczkowalne w sposób ciągły jeżeli wyrażone przez
współrzędne posiada wszystkie pochodne cząstkowe do rzędu r włącznie.
Definicja ta nie jest zależna od wyboru współrzędnych x i y, ponieważ jak to widać z (2.12) różne współrzędne
afiniczne wyrażają się jedne przez drugie za pośrednictwem nieskończenie różniczkowalnej funkcji.
Jest jasne , że złożenie Cr -dyffeomorfizmów jest Cr –dyffeomorfizmem oraz odwzorowanie odwrotne do
Cr – dyffeomorfizmu jest znowu Cr –dyffeomorfizmem.
Definicja. „Układ współrzędnych” na otwartym zbiorze U n-wymiarowej rzeczywistej przestrzeni afinicznej P
jest to odwzorowanie :
x = (x1, ... , xn ) : U
→
Rn
spełniające następujące warunki :
Ic) x – jest injektywne
IIc) zbiór x(U )
⊂
Rn jest otwarty.
Przy tym funkcje xi nazywamy „funkcjami współrzędnościowymi” (funkcjami współrzędnych – przypis własny)
rozpatrywanego układu współrzędnych. Dla punktu p
∈
U zbiór liczb x(p) = (x1(p) , ... , xn(p) ) nazywamy
„współrzędnymi” punktu p w układzie współrzędnych x = (x1, ... , xn )
Układ współrzędnych nazywamy „globalnym” jeśli U = P oraz „lokalnym” w przeciwnym przypadku.
Układ współrzędnych x nazywamy „regularnym” (klasy Cr ) jeśli :
IIIc) x jest Cr –dyffeomorfizmem zbiorów otwartych U i x(U) ■
Dalej dla uproszczenia zapisu elementy przestrzeni Rn i zbiór funkcji współrzędnościowych będziemy często
oznaczać jednym znakiem :
x = (x1, ... , xn )

28
Definicja. Niech na otwartym zbiorze U zadane będą dwa układy współrzędnych :
x : U
→
Rn i x’ : U
→
Rn . Odwzorowanie (oczywiście bijektywne) :
x’ ◦ x-1 : x(U)
→
x’(U)
nazywamy „odwzorowaniem przejścia” od układu współrzędnych x do układu współrzędnych x’.
Dla uproszczenia zapisu odwzorowanie przejścia x’ ◦ x-1 i x ◦ x’ -1 często zapisujemy w postaci :
x’i = x’i (x1, ... , xn ) i xi = xi ( x’1, ... , x’n ) i = 1 ... n (2.13)
(tj. „jedne” współrzędne jako funkcje „drugich” ). Funkcje (2.13) nazywają się „funkcjami przejścia” od jednych
współrzędnych do drugich. ■
Uwaga. Warunek IIIc jest równoważny temu, że funkcja przejścia (2.13) od współrzędnych x = (x1, ... , xn ) do
dowolnych innych współrzędnych afinicznych x’ = ( x’1, ... , x’n ) i odwrotna jest r razy w sposób ciągły
różniczkowalna. (zobacz poprzednia uwaga).
Niech x i x’ będą dwoma regularnymi układami współrzędnych na otwartym zbiorze U. Zgodnie z oznaczeniami
(2.13) umawiamy się oznaczać macierz Jakobiego odwzorowania przejścia x’ ◦ x-1 : w punkcie x = x(p)
∈
x(U),
p
∈
U jako macierz postaci :
( (
∂
x’1/
∂
x1 )p , ... , (
∂
x’1/
∂
x1 )p )
(
∂
x’/
∂
x )p = ( ..................................................... ) (2.14)
( (
∂
x’n/
∂
x1 )p , ... , (
∂
x’n/
∂
xn )p )
tj.
def
(
∂
x’i /
∂
xj )p =
∂
(x’i ◦ x-1 ) (x) /
∂
xj .
To oznaczenie jest wygodne i łatwo je zapamiętać.
Ponieważ odwzorowanie przejścia : x’ ◦ x-1 i x ◦ x’-1 są wzajemnie odwracalne to ich macierze Jakobiego
również są wzajemnie odwracalne :
(
∂
x’i /
∂
xk ) (
∂
xk /
∂
x’j )
≡
δ
i
j
⇔
(
∂
x’ /
∂
x ) (
∂
x /
∂
x’ )
≡
I na U
( I – jednostkowa macierz rzędu n
×
n ). W szczególności te macierze Jakobiego są nieosobliwe.
Przykłady.
1. Prostym przykładem współrzędnych regularnych są współrzędne afiniczne , klasa gładkości tych
współrzędnych to - C∞. Zależności (2.12) zadają funkcje przejścia od jednych współrzędnych
afinicznych do drugich.
2. Rozpatrzmy płaszczyznę euklidesową E2 na której wprowadzono współrzędne kartezjańskie (x, y).
Współrzędne biegunowe
r : E2 / L
→
( 0 , +∞) ,
ϕ
: E2 / L
→
( 0, 2π)
gdzie : L = { p
∈
E2 | x(p) ≥ 0 i y(p) = 0 } – półoś biegunowa
bijektywnie odwzorowują płaszczyznę z nieciągłością na półosi biegunowej tj. zbiór E2 / L , na
otwartą półoś (0, +∞)
×
( 0, 2π)
⊂
R2 i związane są ze współrzędnymi kartezjańskimi funkcjami
przejścia postaci :
x = r cos (
ϕ
) ; y = r sin (
ϕ
)
Funkcje przejścia od współrzędnych biegunowych do współrzędnych kartezjańskich są funkcjami
gładkimi klasy C∞. Łatwe rachunki pokazują :
|
∂
x/
∂
r ,
∂
x/
∂ϕ
| = r > 0 przy (r,
ϕ
)
∈
(0, +∞)
×
( 0, 2π)
|
∂
y/
∂
r ,
∂
y/
∂ϕ
|
Na mocy twierdzenia o odwzorowaniu odwrotnym, funkcje przejścia od współrzędnych kartezjańskich do
biegunowych są również nieskończenie razy różniczkowalne przy (r,
ϕ
)
∈
(0, +∞)
×
( 0, 2π ).
Dlatego współrzędne biegunowe są regularne o klasie gładkości C∞ na zbiorze otwartym E2/ L .
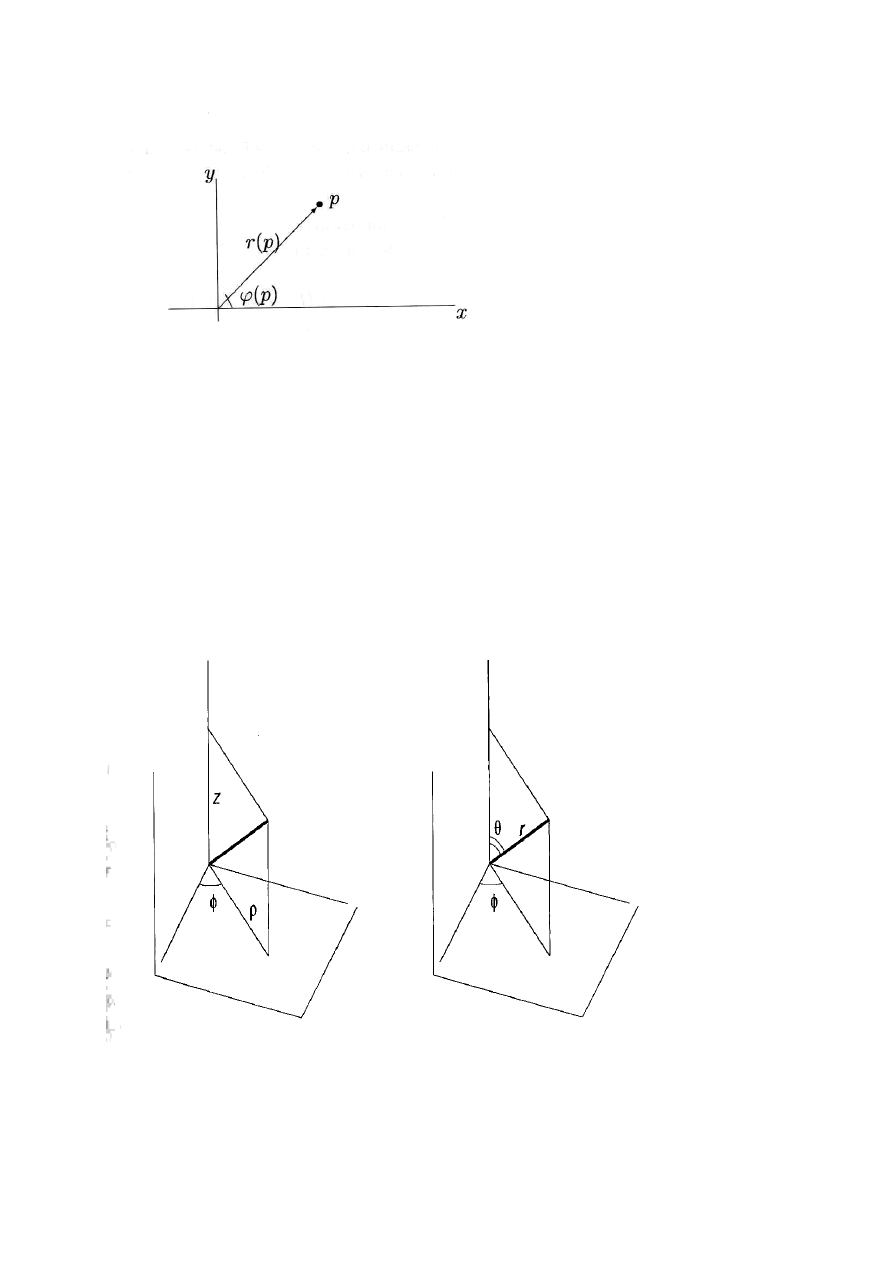
29
Rys. 1 Współrzędne biegunowe (r,
ϕ
) na płaszczyźnie euklidesowej
Oś L odrzucona jest z obszaru określoności współrzędnych nie przez przypadek. Problem polega na tym, że
funkcji
ϕ
nie można przedłużyć na całą płaszczyznę zachowując jej gładkość (tj. zachowując gładką zależność
ϕ
od x i y ) ponieważ
ϕ
ma nieusuwalną nieciągłość pierwszego rodzaju na osi L :
przy x > 0 lim
ϕ
(x, y) = 0 ; lim
ϕ
(x, y) = 2π
y
→
0+ y
→
0-
lim
ϕ
(0.y) = ½π ; lim
ϕ
(0,y) = 3/2 π
y
→
0+ y
→
0-
Punkty osi L – nazywamy „punktami osobliwymi” biegunowego układu współrzędnych. □
Ćwiczenie. Znaleźć obszar określoności współrzędnych cylindrycznych (
ρ
,
ϕ
, z) oraz sferycznych (r, θ,
ϕ
) w
trójwymiarowej przestrzeni euklidesowej :
x =
ρ
cos (
ϕ
), y =
ρ
sin (
ϕ
) , z = z
x = r sin (θ) cos (
ϕ
) , y = r sin (θ) sin (
ϕ
) , x = r cos (θ)
x, y, z – współrzędne kartezjańskie (zobacz rysunek 2)
Rys. 2 Współrzędne cylindryczne i sferyczne

30
2.2.3 Współrzędne krzywoliniowe. Linie współrzędnościowe. Baza lokalna.
Definicja. Niech x : U
→
Rn – będzie układem współrzędnych na otwartym zbiorze U.
Przez każdy punkt p
∈
Uprzechodzi n „linii współrzędnościowych” : i-ta linia współrzędnościowa jest to krzywa
o parametryzacji
ci (t) = x
-1( x1(p) , ... , xi-1(p), xi (p) + t ,xi +1(p), ... , xn (p) )
Innymi słowy wzdłuż i-tej linii współrzędnościowej funkcje xk, k ≠ i danego układu współrzędnych są stałe ,a
przyrost t i-tej współrzędnej służy jako parametr wzdłuż ci .
Przykłady.
1. Linię współrzędnościowe dowolnego afinicznego układu współrzędnych – to linię proste.
2. Liniami współrzędnościowymi układu biegunowego (r ,
ϕ
) na płaszczyźnie euklidesowej są okręgi o środku w
biegunie ( kiedy r = const. a
ϕ
się zmienia) i promienie o środku w biegunie (kiedy r się zmienia a
ϕ
= const. )
Terminologia. Współrzędne regularne nie będące afinicznymi przyjęto nazywać „krzywoliniowymi”
Jeśli x : U
→
Rn – jest regularnym układem współrzędnych , to ci – jest odwzorowaniem gładkim (takiej samej
klasy gładkości jak x ) jako złożenie odwzorowań gładkich. W tym przypadku przechodząca przez punkt p
∈
U
linia współrzędnościowa ci ma w tym punkcie wektor styczny który oznaczamy następująco :
∂
/
∂
xi |p = d/dt |t=0 ci(t) = d/dt |t=0 x
-1( x1(p) , ... , xi-1(p), xi (p) + t ,xi +1(p), ... , xn (p) )
Oczywiście (zgodnie z definicją pochodnej cząstkowej) dla dowolnej funkcji F , różniczkowalnej w punkcie p :
∂
/
∂
xi |p (F) = (
∂
F/
∂
xi )p = d/dx |t=0 F(ci ) (2.15)
Wybierzmy dowolny punkt o
∈
P – jako początek układu współrzędnych i rozpatrzmy funkcje wektorową :
r :P
→
V , r(p) = op→ (2.16)
tj. r(p) – jest wektorem wodzącym punktu p względem punktu o.
Okazuje się , że :
∂
/
∂
xi |p =
∂
r /
∂
xi |p (2.17)
◄Pochodna
∂
/
∂
xi |p = d/dt |t=0 ci(t) jest zgodna z pochodną wektora wodzącego pci(t)
→ przy t = 0 :
d/dt |t=0 ci(t) = lim [ (ci(t) - ci(0)) / t] = lim ( ci(t) – p) / t = lim pci(t)
→ / t = d/dt |
t=0 pci(t)
→
t
→
0 t
→
0 t
→
0
Na mocy (2.15) i definicji (2.16) pochodna (
∂
r /
∂
xi |p ) jest zgodna z pochodną wektora wodzącego oci(t)
→
przy t = 0. Jednak te wektory wodzące różnią się jeden od drugiego o niezależną od t składową :
op→ + pci(t)
→ = oc
i(t)
→
dlatego ich pochodne przy t = 0 są zgodne. ►
Przykład. Niech x = ( x1, ... , xn ) – będzie układem współrzędnych afinicznych, odpowiadającm afinicznemu
reperowi { o, e1, ... , en } , wtedy :
r = xk ek ( r odłożono od punktu o ), zatem :
∂
/
∂
xi |p =
∂
r /
∂
xi |p = ei i = 1 ... n □ (2.18)
Niech x = ( x1, ... , xn ) i x’ = ( x’1, ... , x’n ) – będą regularnymi układami współrzędnych na otwartym zbiorze
U, wtedy dla każdego punktu p
∈
U słuszne jest równanie :
∂
/
∂
x’k |p = (
∂
xi /
∂
x’k )
∂
/
∂
xi |p k = 1 ... n (2.19)
◄Jest to następstwo (2.17) i zasady różniczkowania funkcji złożonej :
∂
r /
∂
x’k = (
∂
r /
∂
xi ) (
∂
xi/
∂
x’k ) ►
Niech teraz x = ( x1, ... , xn ) – będzie zupełnie dowolnym regularnym układem współrzędnych , a
x’ = ( x’1, ... , x’n ) – będzie współrzędnymi afinicznymi odpowiadającymi reperowi afinicznemu
{ o, e1, ... , en }. Na mocy (2.19) i przykładu (2.18) :
∂
/
∂
xi |p = (
∂
x’k /
∂
xi )
∂
/
∂
x’k |p = (
∂
x’k /
∂
xi ) |p e’k

31
Zatem i-ta kolumna macierzy (
∂
x’ /
∂
x )p reprezentuje sobą zbiór współczynników rozkładu wektora (
∂
/
∂
xi )p
względem bazy { e’k }
n
k =1 . Ponieważ det(
∂
x’/
∂
x)p ≠ 0 , to wektory :
∂
/
∂
x1|p , ... ,
∂
/
∂
xn |p
są liniowo niezależne, a to znaczy , że same stanowią bazę przestrzeni wektorowej V.
Definicja. Niech x = ( x1, ... , xn ) : U
→
Rn - będzie regularnym układem współrzędnych.
Bazę :
{
∂
/
∂
x1|p , ... ,
∂
/
∂
xn |p } (2.20)
nazywamy „bazą lokalną” układu współrzędnych x = ( x1, ... , xn ) w punkcie p
∈
U.
Analogicznie, reper :
{ p,
∂
/
∂
x1|p , ... ,
∂
/
∂
xn |p }
nazywamy „reperem lokalnym” układu współrzędnych x = ( x1, ... , xn ) w punkcie p. ■
Okazuje się, że zbiór różniczek funkcji współrzędnych :
{ (dx1)p , ... , (dx
n )
p } (2.21)
jest bazą przestrzeni V* , dualną do bazy (2.20) przestrzeni V.
◄Wystarczy zauważyć, że na mocy (2.4) i (2.15) :
(dxj )p (
∂
/
∂
xi |p ) =
∂
/
∂
xi |p (x
j ) = (
∂
xj /
∂
xi )p =
δ
j
i ►
Z pomocą (2.4) i (2.15) również łatwo można udowodnić, że rozkład różniczki, zróżniczkowanej w punkcie
p
∈
U funkcji f : U
→
R względem 1-form bazowych (dx1)p , ... , (dx
n )
p ma postać :
(df)p = (
∂
f /
∂
xi )p (dx
i )
p (2.22)
◄ (df)p = (
∂
/
∂
xi |p ) =
∂
/
∂
xi |p ( f ) =(df )p = (
∂
f /
∂
xi)p ►
Zauważmy, również następujący prosty wzór dla obliczenia pochodnej kierunkowej we współrzędnych :
mianowicie dla różniczkowalnej w punkcie p funkcji F jest słuszny następujący wzór :
v = vi (
∂
/
∂
xi |p ⇒ vp (F) = (
∂
F/
∂
xi )p v
i (2.23)
◄ Jest to prosta konsekwencja własności (2.5), (2.6) i (2.15) .►
Zależność (2.19) mówi o tym, że jako macierz przejścia od bazy lokalnej :
{ (
∂
/
∂
x1)p , ... , (
∂
/
∂
xn )p } układu współrzędnych ( x
1, ... , xn )
do bazy lokalnej :
{ (
∂
/
∂
x’1)p , ... , (
∂
/
∂
x’n )p } układu współrzędnych ( x’
1, ... , x’n )
służy macierz Jakobiego (
∂
x/
∂
x’ )p .
Zależność (2.19) łatwo jest zapamiętać i zapisywać w postaci jednej równości macierzowej :
∂
/
∂
x’ = (
∂
/
∂
x) • (
∂
x/
∂
x’) (2.24)
w której :
∂
/
∂
x’ = (
∂
/
∂
x’1, ... ,
∂
/
∂
x’n ) ;
∂
/
∂
x = (
∂
/
∂
x1, ... ,
∂
/
∂
xn )
(
∂
x1/
∂
x’1 ....
∂
x1/
∂
x’n )
∂
x/
∂
x’ = ( . ................................. )
(
∂
xn/
∂
x’1 ....
∂
xn/
∂
x’n )
Z (2.19) natychmiast wynika prawo przekształcenia baz dualnych :
(dx'k )p = (
∂
x’k /
∂
xi )p • (dx
i )
p ; k = 1 ... n (2.25)
które można zapisać w postaci macierzowej :
dx’ =
∂
x’ /
∂
x • dx (2.26)
gdzie :
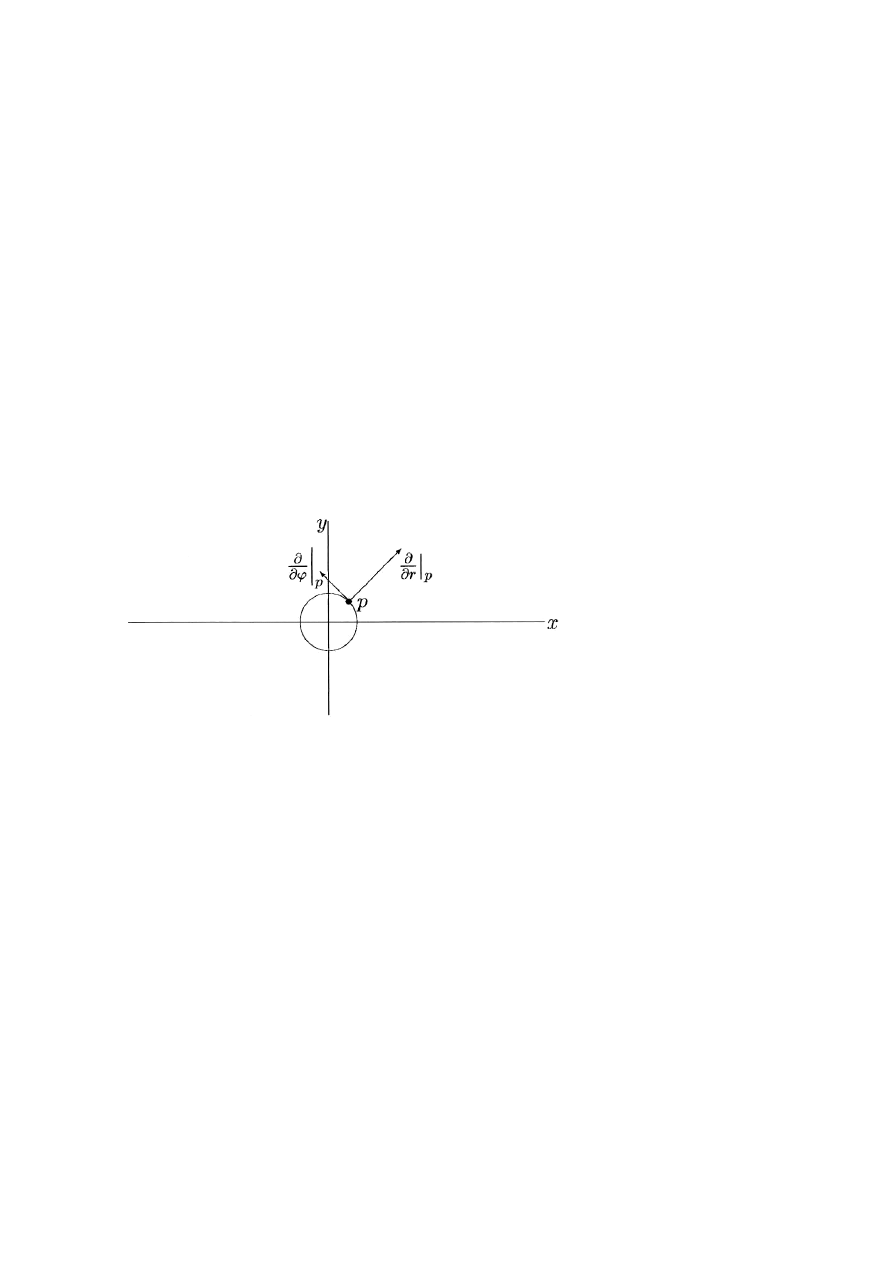
32
(dx’1 ) (dx1 ) (
∂
x’1/
∂
x1 ....
∂
x’1/
∂
xn )
dx’ = ( .... ) ; dx = ( ... ) ;
∂
x’/
∂
x = ( ................................ )
(dx’n ) ( dxn ) (
∂
x’n/
∂
x1 ....
∂
x’n/
∂
xn )
Przykłady.
1. Lokalną bazą afinicznego układu współrzędnych ( x1, ... , xn ) określonego przez reper { o, e1, ... , en } , w
dowolnym punkcie jest właśnie baza {e1, ... , en } zobacz (2.18) ( w przeciwieństwie do lokalnej bazy
krzywoliniowego układu współrzędnych który zmienia się (ogólnie) od punktu do punktu )
Odpowiednio zatem dla dowolnego punktu p
∈
U :
(dxi )p = e
i , i = 1. ..n
gdzie : {e1, .... , en } – jest bazą dualną do {e1, ... , en }
2. Dla współrzędnych biegunowych (r,
ϕ
) (wektor wodzący odkładamy od bieguna )
r(r,
ϕ
) = x(r,
ϕ
) • e1 + y(r,
ϕ
) • e2 = r cos (
ϕ
) ) • e1 + r sin (
ϕ
) ) • e2
gdzie : e1 =
∂
/
∂
x ; e2 =
∂
/
∂
y – są wersorami kartezjańskiego układu współrzędnych (x, y).
Baza lokalna współrzędnych biegunowych w dowolnym punkcie o współrzędnych (r,
ϕ
) jest następująca :
∂
/
∂
r =
∂
r /
∂
r = cos (
ϕ
) • e1 + sin (
ϕ
) • e2 = ( x •
∂
/
∂
x + y •
∂
/
∂
y ) / sqrt (x2 + y2) (2.27)
∂
/
∂ϕ
=
∂
r/
∂ϕ
= r • ( - sin (
ϕ
) • e1 + cos (
ϕ
) • e2 ) = - y •
∂
/
∂
x + x •
∂
/
∂
y (2.28)
Rys. 3 Reper lokalny { p, (
∂
/
∂
r )p , (
∂
/
∂
y)p } biegunowego układu współrzędnych
Zauważmy, że iloczyn skalarny wektorów
∂
/
∂
r i
∂
/
∂ϕ
jest wszędzie równy zeru tj. baza lokalna biegunowego
układu współrzędnych jest ortogonalna w każdym punkcie ( nie jest jednak ortonormalna).
Rozłożymy teraz bazę dualną : {dr, d
ϕ
} względem bazy {dx, dy }.
Z pomocą (2.26) w którym (x’1= r , x’2 =
ϕ
) i ( x1= x , x2= y ) znajdujemy :
( dr ) (
∂
r/
∂
x ,
∂
r /
∂
y ) ( dx ) (
∂
x/
∂
r ,
∂
x /
∂ϕ
) -1 ( dx ) ( cos (
ϕ
) -r sin(
ϕ
) ) -1 ( dx )
(d
ϕ
) = (
∂
y/
∂
x ,
∂ϕ
/
∂
y ) • ( dy ) = (
∂
y/
∂
r ,
∂
y /
∂ϕ
) • ( dy ) = ( sin (
ϕ
) r cos (
ϕ
) ) • ( dy ) =
( cos (
ϕ
), sin(
ϕ
) ) ( dx )
= (
−
sin (
ϕ
) /r ,cos (
ϕ
)/r ) dy
Zatem :
dr = cos (
ϕ
) dx + sin (
ϕ
) dy = (x dx + y dy ) /sqrt (x2 + y2) (2.29)
d
ϕ
= (
−
sin (
ϕ
) dx + cos (
ϕ
) dy ) / r = (
−
y dx + x dy ) /sqrt (x2 + y2) (2.30)
Zwróćmy uwagę na następujący interesujący fakt : bez względu na to czy współrzędne biegunowe są określone
na płaszczyźnie z wyjątkiem osi biegunowej, wektory
∂
/
∂
r ,
∂
/
∂ϕ
i 1-formy : dr , d
ϕ
są określone, jak to widać z
(2.27) – (2.30) na szerszym zbiorze - na całej płaszczyźnie □

33
Definicja. Współrzędne regularne w przestrzeni euklidesowej nazywają się „ortogonalnymi” jeśli baza lokalna
tych współrzędnych jest ortogonalna w każdym punkcie obszaru ich określoności ■
Prostszym przykładem współrzędnych ortogonalnych krzywoliniowych są współrzędne biegunowe (zobacz
poprzedni przykład i rysunek 3 ). Współrzędne sferyczne i cylindryczne są również przykładami współrzędnych
ortogonalnych krzywoliniowych (czego sprawdzenie pozostawiamy czytelnikowi )
2.2.4 Macierz Jakobiego jako macierz różniczki.
Niech P1 i P2 będą skończenie wymiarowymi , rzeczywistymi przestrzeniami afinicznymi , U
⊂
P1 – otwartym
zbiorem. Rozpatrzymy odwzorowanie różniczkowalne w punkcie p
∈
U :
F : U
→
P2
Niech x = ( x1, ... , xn ) – będzie regularnym układem współrzędnych na zbiorze U,
y = ( y1, ... , yn ) – regularnym układem współrzędnych na pewnym otwartym zbiorze V
⊃
F(U).
Okazuje się, że macierz operatora liniowego (dF)p w bazach :
{
∂
/
∂
x1|p , ... ,
∂
/
∂
xn |p } i {
∂
/
∂
y1|F(p) , ... ,
∂
/
∂
ym |F(p) }
jest to macierz Jakobiego :
( (
∂
y1○ F ) /
∂
x1 ... (
∂
y1○ F ) /
∂
xn )
( (
∂
y ○ F ) /
∂
x )p = ( ………………………………….. )
( (
∂
ym○ F ) /
∂
x1 ... (
∂
ym○ F ) /
∂
xn )p
m
(dF) p (
∂
/
∂
xi | p ) =
Σ
(
∂
yk ○ F ) /
∂
xi )p
∂
/
∂
yk | F(p) , i = 1 … n (2.31)
k =1
◄ W istocie , z jednej strony na mocy (2.4) i (2.15) :
(dF) p (
∂
/
∂
xi | p ) = (
∂
/
∂
xi |p (F) = (
∂
F /
∂
xi )p
Z drugiej strony , na mocy (2.15) i (2.3) :
(
∂
yk ○ F ) /
∂
xi )p = d/dt |p (
∂
yk ○ F ) (ci(t)) = d/dt |p y
k (F (c
i(t)) = (dy
k )
F(p) ( d/dt |p (F (ci(t)) ) =
= (dyk)F(p) (
∂
F /
∂
xi )
gdzie ci jest i-tą krzywą współrzędnościową układu współrzędnych ( x
1, ... , xn ) przechodzącą przez punkt p.
Zatem , (
∂
yk ○ F ) /
∂
xi )p jest k-tą współrzędną wektora (
∂
F/
∂
xi )p w bazie lokalnej
{ (
∂
/
∂
y1 )F(p) , ... , (
∂
/
∂
ym )F(p) } ►
2.2.5 Orientacja regularnego układu współrzędnych
Niech P – będzie zorientowaną rzeczywistą n-wymiarową przestrzenią afiniczną. Zorientowanie P , oznacza , że
w przestrzeni wektorowej V , sprzężonej z P wybrano pewną orientacje D.
Definicja. Zorientowanym lub dodatnio zorientowanym układem współrzędnych w zorientowanej przestrzeni
afinicznej P nazywamy taki regularny układ współrzędnych x : U
→
Rn , U
⊂
P, dla którego spełniony jest
następujący warunek :
orientacja sprzężonej z P przestrzeni wektorowej V zadana przez bazę lokalną
{ (
∂
/
∂
x1|p , ... , (
∂
/
∂
xn |p }
w każdym punkcie p
∈
U jest zgodna z D.
Jeśli przeciwnie, orientacja zadana przez lokalna bazę w każdym punkcie p
∈
U jest przeciwna do D , to układ
współrzędnych nazywamy „ujemnie zorientowanym”. ■
Łatwo dowodzi się następującego wniosku :
Wniosek 2.1 Jeśli obszar określoności U, regularnego , klasy gładkości C1 , układu współrzędnych
x = ( x1, ... , xn ) : U
→
Rn , jest spójny , to ten układ współrzędnych jest albo dodatnio zorientowany albo
zorientowany ujemnie.

34
◄ Niech y = ( y1, ... , yn ) – będzie afinicznym układem współrzędnych, odpowiadającym reperowi
{ o, e1, ... , en } o dodatnio zorientowanej bazie. Rozpatrzymy funkcje ciągłą :
J : U
→
R, J(p) = det (
∂
y/
∂
x)p
Funkcja ta nigdzie nie zeruje się , ponieważ macierz przejścia od jednej bazy do drugiej jest nieosobliwa.
Ustalmy dowolny punkt p0
∈
U. Wiemy, że dwie bazy są zorientowane jednakowo wtedy i tyko wtedy, jeżeli
wyznacznik macierzy przejścia od jednej z tych baz do drugiej jest dodatni.
Dlatego J(p0 ) > 0 jeśli baza{(
∂
/
∂
xi )p0}
n
i =1 jest zorientowana dodatnio i J(p0 ) < 0 jeśli jest zorientowana
ujemnie.
Rozpatrzmy dowolny punkt p
∈
U. Ponieważ U jest zbiorem spójnym, to punkty p0 i p można połączyć krzywą
ciągłą, całkowicie leżącą w U, tj. istnieje funkcja ciągła c : [a,b]
→
P, taka , że :
c(t)
∈
U, przy a
≤
t
≤
b i c(a) = p0 , c(b) = p
Teraz jest jasne, że znak J(p) jest zgodny ze znakiem J(p0). W istocie, jeśli by tak nie było to funkcja ciągła J○ c
przyjmowała by na końcach odcinka [a, b] wartości o różnych znakach. Zgodnie ze znanym twierdzeniem
analizy wynikało by z tego ,że J(c(t*)) = 0 w pewnym punkcie a < t* < b.
Jednak prowadziło by to sprzeczności z tym , że c(t*)
∈
U i J
≠
0 na U.
W takim razie, funkcja J zachowuje znak na zbiorze U tj. baza lokalna {(
∂
/
∂
xi )p}
n
i =1 zadaje w każdym
punkcie p
∈
U jedną i tą samą orientacje. ►
Przykłady. We wszystkich poniższych przykładach przyjmujemy, że współrzędne kartezjańskie są dodatnio
zorientowane.
1. Współrzędne biegunowe (x1= r , x2 =
ϕ
) (związane z współrzędnymi kartezjańskimi zwykłymi zależnościami
są orientowalne ). Jest to jasne geometrycznie, (zobacz rysunek 3 ) Dowód analityczny jest również posty :
| (
∂
x/
∂
r) (
∂
x/
∂ϕ
) | = r > 0
| (
∂
y/
∂
r) (
∂
y/
∂ϕ
) |
2. Współrzędne sferyczne (x1= r , x2 =
θ
, x3=
ϕ
) :
x = sin (
θ
) cos (
ϕ
) , y = r sin (
θ
) sin (
ϕ
) , x = r cos (
θ
)
r > 0 , 0 <
θ
<
π
, 0 <
ϕ
< 2
π
są orientowalne , ponieważ :
| (
∂
x/
∂
r) (
∂
x/
∂θ
) (
∂
x/
∂ϕ
) | = r
2 sin (
θ
) > 0
| (
∂
y/
∂
r) (
∂
y/
∂θ
) (
∂
y/
∂ϕ
) |
| (
∂
z/
∂
r) (
∂
z/
∂θ
) (
∂
z/
∂ϕ
) |
Podkreślamy jeszcze raz, że własność „orientowalności” układu współrzędnych zależna jest od porządku
numeracji współrzędnych : jeśli przenumerować współrzędne za pomocą permutacji nieparzystej, to
współrzędne te przyjmą przeciwną do wejściowej orientacje.
Przykładowo - układy współrzędnych :
(x1= r , x2 =
θ
, x3=
ϕ
) i (x1= r , x2 =
ϕ
, x3=
θ
) zadają przeciwne orientacje, chociaż geometryczny sens
wielkości : r,
ϕ
,
θ
- jest jeden i ten sam w obu przypadkach . □
2.3 Pola wektorowe i tensorowe.
Niech P – będzie rzeczywistą przestrzenią afiniczną o wymiarze n, stowarzyszoną z przestrzenią wektorową V.
2.3.1 Pola wektorowe.
Definicja. Pole wektorowe v na zbiorze U
⊂
P jest to odwzorowanie
v : U
→
V , p |
→
vp
przyporządkowujące każdemu punktowi p
∈
U pewien wektor vp
∈
V . Razem z oznaczeniem vp , dla
oznaczenia wartości pola wektorowego w punkcie p wykorzystujemy również oznaczenia : v|p , (v)p , v(p) . ■

35
Pola wektorowe można dodawać, mnożyć przez funkcje przyjmujące wartości w R. Operacje te są dane
następująco :
( v + w )p = vp + wp
(f
•
v)p = f(p)
•
vp ,
Prostym przykładem pola wektorowego- jest pole
∂
/
∂
xi i-tego wektora bazowego, i = 1 ... n, dowolnego
regularnego układu współrzędnych x = ( x1, ... , xn ) : U
→
Rn :
∂
/
∂
xi : U
→
V , p |
→
∂
/
∂
xi |p
Dowolne pole wektorowe v na U można rozłożyć względem wektorów bazowych tego pola wektorowego :
v = vi
∂
/
∂
xi
o współczynnikach rozkładu vi , zależnymi (w ogólności) od punktu p
∈
U :
vp = v
i (p)
∂
/
∂
xi |p , p
∈
U
Definicja, Funkcje v1 , ... ,vn : U
→
R nazywamy składowymi (lub współrzędnymi ) pola wektorowego v w
układzie współrzędnych x = ( x1 , ... ,xn ) ■
Jeśli na otwartym zbiorze U zadane są dwa regularne układy współrzędnych x = ( x1 , ... ,xn ) i
x’ = ( x’1 , ... ,x’n ) to dowolne pole wektorowe v można rozłożyć zarówno względem pól wektorów bazowych :
{
∂
/
∂
x1, ... ,
∂
/
∂
xn } jak i {
∂
/
∂
x’1, ... ,
∂
/
∂
x’n } :
v = vi
∂
/
∂
xi = v’k
∂
/
∂
x’k
Ponieważ macierz przejścia od bazy {
∂
/
∂
xi}ni =1 do bazy {
∂
/
∂
x’k }nk =1 jest macierzą Jakobiego
∂
/
∂
x’
(zobacz (2.19)), to współczynniki rozkładu vi i v’k związane są ze sobą równaniami :
v’k = (
∂
x’k /
∂
xi ) vi , k = 1 ... n (2.32)
spełnionym w każdym punkcie p
∈
U
Definicja. Pole wektorowe v na otwartym zbiorze U nazywamy „gładkim” o klasie gładkości Cr , jeżeli możemy
zadać na tym zbiorze, regularny (o klasie gładkości Cr+1 ) układ współrzędnych x : U
→
Rn taki, że składowe
vi pola v w tym układzie współrzędnych są funkcjami r razy różniczkowalnymi w sposób ciągły ■
Na mocy zależności (2.32) definicja ta jest poprawna tj. nie zależy od wyboru współrzędnych o wskazanej klasie
gładkości.
Zbiór wszystkich gładkich (o klasie gładkości Cr ) pól wektorowych na zbiorze otwartym U, przestrzeni
afinicznej P przyjęto oznaczać znakiem : Xr (U).
Zamiast X∞ (U), piszemy zwykle X (U). Często bywa wygodnie rozumieć pod X (U) zbiór wszystkich gładkich
pól wektorowych zadanych na wszystkich możliwych odkrytych podzbiorach U
⊂
P (z kontekstu zawsze będzie
jasno wynikać co mamy na myśli )
Definicja. Niech F – będzie różniczkowalną w otoczeniu punktu p funkcją , v – polem wektorowym, zadanym w
otoczeniu punktu p. Pochodna kierunkowa funkcji F w kierunku pola wektorowego v – jest to funkcja oznaczana
przez v(F) i określona zależnością :
v(F) (p) = vp(F) ■
Z (2.23) wynika ,że pochodna kierunkowa obliczana jest w dowolnych regularnych współrzędnych
x = ( x1 , ... ,xn ) z zależności :
v(F) = (
∂
F/
∂
xi ) vi ,gdzie v = vi (
∂
/
∂
xi ) (2.33)

36
2.3.2 Pola tensorowe o dowolnej strukturze.
Definicja. Pole tensorowe T, k razy kowariantne i m razy kontrawariantne (lub krócej - pole tensorowe o
strukturze (k, m) na zbiorze U
⊂
P - jest to odwzorowanie :
T : U
→
T mk (V) , p |
→
Tp
przyporządkowujące każdemu punktowi p
∈
U pewien (k, m )- tensor Tp
∈
T mk (V) . Razem z oznaczeniem
Tp wykorzystujemy oznaczenia : T | p i (T)p ■
Operacje algebraiczne które możemy wykonać nad polami tensorowymi są następujące :
(T + R ) p = Tp + Rp
(T
⊗
R ) = Tp
⊗
Rp
(trba T ) p = tr
b
a T p
(
ξ
∧
η
) p =
ξ
p
∧
η
p
(*A )p = *Ap
( f
•
T)p = f(p)
•
Tp ,
gdzie: T, R – pola tensorowe (oczywiście mające odpowiednią dla wykonywalności danego działania strukturę) ,
ξ
,
η
- kowariantne pola tensorowe, A – pole m-form zewnętrznych lub m-wektorów , f – funkcja przyjmująca
wartości w R (tj. pole (0, 0) tensorowe )
Prostym przykładem pola 1-form tj. pola (1, 0 )-tensorowego jest pole i-tego kowektora bazowego dxi ,
regularnego układu współrzędnych x = ( x1 , ... ,xn ) : U
→
Rn :
dxi : U
→
V* = T
0
1 (V) , p |
→
(dxi )p
Innym przykładem pól (k, m ) -tensorowych mogą być pola wektorów bazowych postaci :
dxj1
⊗
...
⊗
dxjk
⊗
∂
/
∂
xi1
⊗
...
⊗∂
/
∂
xim
Dowolne (k, m)- pole tensorowe T, na U można rozłożyć względem tych pól :
T = Ti1 ... imj1 ... jk dx
j1
⊗
...
⊗
dxjk
⊗
∂
/
∂
xi1
⊗
...
⊗∂
/
∂
xim
o współczynnikach rozkładu Ti1 ... imj1 ... jk zależnych (w ogólności ) od punktu p
∈
U :
Tp = T
i1 ... im
j1 ... jk (p) (dx
j1)
p
⊗
...
⊗
(dxjk )p
⊗
∂
/
∂
xi1 |p
⊗
...
⊗
∂
/
∂
xim |p
Definicja. Funkcje Ti1 ... imj1 ... jk : U
→
R ,
Ti1 ... imj1 ... jk (p) = Tp(
∂
/
∂
xj1|p ...
∂
/
∂
xjk |p ; (dx
i1)
p ... (dx
im
)p )
nazywamy „składowymi pola tensorowego T “ w regularnym układzie współrzędnych
x = ( x1 , ... ,xn ) : U
→
Rn ■
Przy zmianie regularnych współrzędnych x’j = x’j (x1 ... xn ) , j = 1 ... n
składowe pola tensorowego :
T = Ti1 ... imj1 ... jk dx
j1
⊗
...
⊗
dxjk
⊗
∂
/
∂
xi1
⊗
...
⊗∂
/
∂
xim = T’
n1 ... nm
s1 ... sk dx’
s1
⊗
...
⊗
dx’sk
⊗
∂
/
∂
x’n1
⊗
...
⊗∂
/
∂
x’nm
przekształcają się według prawa :
T’n1 ... nms1 ... sk = (
∂
xj1/
∂
x’s1) … (
∂
xjk/
∂
x’sk) (
∂
x’n1/
∂
xi1) ... (
∂
x’nm/
∂
xim)Ti1 ... imj1 ... jk (2.34)
macierz przejścia od bazy {
∂
/
∂
xi }n i=1 do bazy {
∂
/
∂
’xj }n j=1 jest macierzą Jakobiego (
∂
x/
∂
x’)
Szczególnym przypadkiem wzoru (2.34) jest prawo przekształcenia składowych pola wektorowego (2.32) i
prawo przekształcenia składowych pola kowektorowego (tj. 1-formy) :
ω = ωi dxi = ω’ dx’k ⇒ ω’k = (
∂
xi /
∂
x’k ) ωi (2.35)

37
Definicja. Pole tensorowe T na otwartym zbiorze U nazywamy „gładkim” o klasie gładkości Cr , jeżeli możemy
znaleźć regularny , o klasie gładkości Cr+1, układ współrzędnych x : U
→
Rn taki , że składowe T
...
.... pola T
w tym układzie współrzędnych są funkcjami r razy różniczkowalnymi. ■
Na mocy zależności (2.34) definicja ta jest poprawna tj. nie zależy od wyboru współrzędnych o wskazanej klasie
gładkości .
Zbiór wszystkich gładkich pól (k, m)- tensorowych na otwartym zbiorze U przestrzeni afinicznej P, przyjęto
oznaczać : T mk (U). Klasa gładkości C
r
w tym oznaczeniu nie jest uwzględniona jednak wynika ona z
kontekstu. Często bywa wygodnie oznaczać przez T mk (P) zbiór wszystkich gładkich pól wektorowych
zadanych na wszystkich możliwych podzbiorach U
⊂
P
(z kontekstu zawsze będzie wynikało co mamy na myśli )
Dla zbiorów T 10(U) i T
0
1(U) stosujemy osobne oznaczenia :
Χ
(U) = T 10(U) ,
Χ
*(U) = T 01(U)
Dowolne pole 1-form ω naturalnie jest interpretować jako odwzorowanie przeprowadzające pola wektorowe v
na funkcje ω(v) przyjmujące wartości w zbiorze R , zdefiniowane zależnością :
ω(v) (p) =ωp(vp )
Jest jasne , że to odwzorowanie charakteryzuje się następującymi własnościami :
(v, w – pola wektorowe , f- funkcja przyjmująca wartości w R )
ω(v + w) = ω(v) + ω(w) (2.36)
ω(f
•
v) = f
•
ω(v) (2.37)
Analogicznie będziemy interpretowali pole (k, m)-tensorowe jako odwzorowanie przeprowadzające zbiory (
( v1, ... , vk ; ω
1, ... , ωm ) w funkcje :
T( v1, ... , vk ; ω
1, ... , ωm ) zdefiniowaną zależnością :
T( v1, ... , vk ; ω
1, ... , ωm ) (p) = T
p ( v1|p , ... , vk|p ; ω
1|
p , .. , ω
m |
p )
Jest również jasne , że takie odwzorowanie spełnia warunki (2.36) i (2.37) względem każdego ze swoich
argumentów.
Ważnym przykładem pola 1-form jest różniczka df , funkcji gładkiej przyjmującej wartości w R f : p |- >(df)p.
Rozkład df względem bazowych 1-form dx1... dxn we współrzędnych regularnych (x1,...,xn ) ma postać
(zobacz (2.22) ) :
df = (
∂
f/
∂
xi) dxi (2.38)
Ćwiczenie. Sprawdzić następujące własności różniczki df :
d (f +
ϕ
) = df + d
ϕ
(2.39)
(f
•ϕ
) = df
•
ϕ
+ f
•
d
ϕ
(2.40)
d (u ○ f ) = (u’ ○ f )
•
df (2.41)
gdzie : f : U
→
R i
ϕ
: U
→
R dowolne funkcje gładkie ; u : J
→
R – funkcja gładka i J
⊂
R – zbiór otwarty
zawierający w sobie zbiór f(U) ; u’ – pochodna funkcji u.
2.3.3 Formy różniczkowe.
Definicja. „k-formą różniczkową” na zbiorze otwartym U nazywamy pole tensorowe A
∈
T 0k (U), spełniające
warunek :
∀
p
∈
U Ap
∈
Λ
p (V ) ■
Inaczej mówiąc , aby zadać k-formę różniczkową na U należy dla każdego punktu p
∈
U zadać k-formę
zewnętrzną na przestrzeni wektorowej V tak aby ta forma gładko zależała od punktu.
Zbiór wszystkich k-form różniczkowych na zbiorze otwartym U oznaczamy
Λ
k (V ). W szczególności :
Λ
1(V ) = T
0
1(U) =
Χ
* (U)

38
Jeżeli x = (x1,...,xn ) : U
→
Rn – jest regularnym układem współrzędnych na U , to dowolną k-formę
różniczkową A
∈
Λ
k (V ) na zbiorze U można przedstawić w postaci :
A =
ΣΣΣΣ
Ai1… ik dx
i1
∧
…
∧
dxik
i1<…< ik
gdzie 1-forma różniczkowa dxi – jest to różniczka funkcji współrzędnościowej xi , oraz :
Ai1… ik = A (
∂
/
∂
xi1, … ,
∂
/
∂
xik ) , i1… ik = 1 ... n
2.3.4 Tensor metryczny i forma objętości we współrzędnych krzywoliniowych
Niech P – będzie rzeczywistą przestrzenią afiniczną o wymiarze n, stowarzyszoną z przestrzenią wektorową V,
g – jest tensorem metrycznym na V ,
Ω
- formą objętości na V. Możemy rozpatrywać g i
Ω
jako pola tensorowe
na P : w każdym punkcie przyjmują one jedną i tą samą wartość. Jeśli x = (x1,...,xn ) są współrzędnymi
regularnymi na U , to pola tensorowe g i
Ω
można rozłożyć na U względem wektorów bazowych tych pól
tensorowych :
g = gik dx
i
⊗
dxk gdzie : gik = g (
∂
/
∂
xi,
∂
/
∂
xk )
Ω
= ω dx1
∧
…
∧
dxn gdzie ω =
Ω
(
∂
/
∂
xi,
∂
/
∂
xk )
W szczególności , jeśli V jest przestrzenią orientowalną i
Ω
=
Ω
g – jest metryczną formą objętości to :
Ω
g =
±
√
|
γ
| dx1
∧
…
∧
dxn gdzie
γ
= det [ (gij )
n
i, j = 1]
(znak „+” odpowiada dodatniemu zorientowaniu współrzędnych, znak „-„ ujemnemu )
Jeśli układ współrzędnych (x1,...,xn ) jest układem krzywoliniowym to mimo to , że pola tensorowe g i
Ω
są
stałe , ich składowe rozkładu gij i ω będą się zmieniały (ogólnie mówiąc) od punktu do punktu, tak jak zmienia
się baza lokalna {
∂
/
∂
xi }n i = 1 tj. będą funkcjami punktu (lub jeśli to wygodniejsze – funkcjami współrzędnych
tego punktu )
Przykład. Niech g = < . , . > - będzie euklidesowym tensorem metrycznym na dwuwymiarowej przestrzeni
afinicznej (płaszczyźnie) ,
Ω
=
Ω
g – jest metryczną formą objętości , (x
1, x2 ) = (r,
ϕ
) – współrzędne
biegunowe. Wykorzystując otrzymane wcześniej wzory (2.27) , (2.28) znajdujemy :
g11 = <
∂
/
∂
r ,
∂
/
∂
r > = 1 (2.42)
g22 = <
∂
/
∂ϕ
,
∂
/
∂ϕ
> = r2 (2.42)
g12 = g21 = (
∂
/
∂
r ,
∂
/
∂ϕ
> = 0 (2.42)
Zatem :
g = dr
⊗
dr + r2 d
ϕ
⊗
d
ϕ
I dalej :
( | g11 g12 | )
ω = sqrt ( | g21 g22 | ) = r = >
Ω
g = r dr
∧
d
ϕ
□
2.3.5 Gradient gładkiej funkcji
Niech P – będzie rzeczywistą przestrzenią afiniczną o wymiarze n, stowarzyszoną z przestrzenią wektorową V,
g – tensorem metrycznym na V, U
⊂
P – zbiorem otwartym.
Definicja. „Gradient” gładkiej funkcji f : U
→
R jest to pole wektorowe : oznaczane „ grad f ” stowarzyszone z
jego różniczką df
■
Z (2.38) wynika ,że rozkład pola wektorowego grad f względem pola wektorowego wektorów bazowych
{
∂
/
∂
xi}ni = 1 regularnych współrzędnych (x
1, ... ,xn ) ma postać :
grad f = ( gik (
∂
f /
∂
xk ))
∂
/
∂
xi (2.43)
gdzie gik – jest elementem macierzy odwrotnej do macierzy Grama ( gik )
n
i,k= 1.

39
Przykład. Wykorzystując współrzędne biegunowe ( zobacz (2.42) ) , mamy :
( g11 , g12 ) = ( 1 0 ) ⇒ ( g
11 , g12 ) = ( 1 0 )
( g21 , g22 ) ( 0 r
2 ) (g21 , g22 ) ( 0 r -2 )
Dlatego rozkład gradientu dowolnej funkcji gładkiej f względem lokalnej bazy {
∂
/
∂
r ,
∂
/
∂ϕ
} współrzędnych
biegunowych ma postać :
grad f = (
∂
f/
∂
r)
∂
/
∂
r + (1/r2 )(
∂
f/
∂ϕ
)
∂
/
∂ϕ
□
Ćwiczenie. Sprawdzić następujące właściwości gradientu :
grad ( f +
ϕ
) = grad f + grad
ϕ
(2.44)
grad ( f
•
ϕ
) = grad f
•
ϕ
+ f
•
grad
ϕ
(2.45)
(grad f ) (
ϕ
) = (grad
ϕ
) (f) = g (grad f , grad
ϕ
) (2.46)
grad ( u ○ f ) = (u’ ○ f ) grad f (2.47)
gdzie : f : U
→
R i
ϕ
: U
→
R - są dowolnymi funkcjami gładkimi ; u : J
→
R – funkcja gładka i J
⊂
R – jest
zbiorem otwartym zawierającym zbiór f(U) , u’ – jest pochodna funkcji u .
2.4 Zastosowania cz. 2 . Równanie dynamiki punktu we współrzędnych krzywoliniowych
2.4.1 Prędkość i przyspieszenie punktu we współrzędnych krzywoliniowych.
Niech En – będzie przestrzenią euklidesową (punktową) o wymiarze n ( n = 2 lub 3 ), tensor metryczny
będziemy oznaczali nawiasami ostrymi : < . , . >
Niech c : R
→
En – będzie gładką parametryzowaną krzywą (o klasie gładkości Cr , r ≥ 2 ),
x = (x1, ... ,xn ) : U
→
Rn – regularnym układem współrzędnych (o klasie gładkości Cr , r ≥ 2 ) na otwartym
zbiorze U
⊂
En , zawierającym nośnik krzywej c tj. { c(t) | t
∈
Rn }
⊂
U.
Przez r(t) oznaczmy wektor wodzący punktu p
∈
En (zobacz (2.16) )
Będziemy interpretować krzywą c ,jako prawo ruchu tego punktu w przestrzeni En , c(t) – jest położeniem
punktu w chwili t .
Przyjmijmy następującą terminologię :
x
°
- oznaczać będzie pochodną wielkości x względem t (czasu)
def
v(t) = r
°
(t) = d/dt[ r(c(t))] – wektor „prędkości“ w chwili czasu t
def
w(t) = r
°°
(t) = d 2/dt2 [ r(c(t))] – wektor „przyspieszenia“ w chwili czasu t
def
x
°°°°
i (t) = d /dt [ xi (c(t))] i x
°°°°°
i (t) = d 2/dt2[ xi (c(t))] - uogólnione prędkości i przyspieszenia w chwili czasu t
def
T(x, x
°°°°
) = T(x1, ... ,xn ; x
°
1, ... ,x
°
n ) = ½
gik (x)x
°°°°
i x
°°°°
k - energia kinetyczna
gik = <
∂
/
∂
xi ,
∂
/
∂
xk > oraz wszystkie 2n argumentów (x1, ... ,xn ; x
°
1, ... ,x
°
n ) funkcji T uważamy za zmienne
niezależne.
Rozłożymy względem wektorów lokalnej bazy rozpatrywanego układu współrzędnych (x1, ... ,xn ) wektor
prędkości punktu, poruszającego się po krzywej c. W tym celu zróżniczkujemy r(c(t)) względem t
(różniczka funkcji złożonej ) :
r
°
= (
∂
r/
∂
xi ) (dxi/dt)
a następnie zapiszemy wynik uwzględniając (2.17) i wprowadzimy w/w oznaczenia :
v = x
°°°°
i
∂
/
∂
xi (2.48)

40
Wyjaśnijmy teraz dlaczego funkcja T nazywa się energią kinetyczną. W punkcie c(t) krzywej c uwzględniając
(2.48) mamy :
T(x(t) ,x
°°°°
(t) )= ½ gik (x(t)) x
°°°°
i (t) x
°°°°
k (t) = ½ < v(t) , v(t) > = ½ [ v(t) ]2
( v 2 – kwadrat skalarny v )
Zatem , T = T(x, x
°°°°
) – jest energią kinetyczną punktu materialnego o masie m = 1, przedstawioną w postaci
funkcji współrzędnych i prędkości punktu.
Oznaczmy przez wk (t) kowariantne składowe wektora przyspieszenia w(t) w bazie lokalnej {(
∂
/
∂
xi)c(t) }
n
i = 1
Okazuje się , że wk można obliczyć korzystając ze wzoru :
wk (t) = d/dt (
∂
T ( x(t)), x
°
(t) ) /
∂
x
°°°°
k ) -
∂
T( x(t), x
°
(t) ) /
∂
x
°°°°
k , k = 1 ... n (2.49)
◄Dowód opiera się na rachunku :
T = ½ < v(t) , v(t) > = ½ < (
∂
r/
∂
xi ) x
°
i , (
∂
r/
∂
xj ) x
°
j >
∂
T/
∂
x
°
i =
∂
/
∂
x
°
k ½ < (
∂
r/
∂
xi ) x
°
i , (
∂
r/
∂
xj ) x
°
j > = ½ <
∂
r/
∂
xk , (
∂
r/
∂
xj ) x
°
j > + ½ < (
∂
r/
∂
xi ) x
°
i , (
∂
r/
∂
xk ) >
= <
∂
r/
∂
xk , (
∂
r/
∂
xj ) x
°
j > = < (
∂
r/
∂
xk ) , v >
d/dt (
∂
T /
∂
x
°
k ) = d/dt < (
∂
r/
∂
xk ) , v > = < (
∂
2 r/
∂
xi
∂
xk )x
°
i , v > + <(
∂
r/
∂
xk ) , w > =
= < (
∂
2 r/
∂
xi
∂
xk )x
°
i , v > + w
k (t)
∂
T/
∂
xk =
∂
/
∂
xk ½ < (
∂
r/
∂
xi ) x
°
i , (
∂
r/
∂
xj ) x
°
j > = ½ < (
∂
2r/
∂
xi
∂
xk )x
°
i , (
∂
r/
∂
xj) x
°
j > +
+ ½ < (
∂
r/
∂
xi ) x
°
i , (
∂
2r/
∂
xk
∂
xj )x
°
j > = < (
∂
2 r/
∂
xk
∂
xi )x
°
i , (
∂
r/
∂
xj )x
°
j > = < (
∂
2r/
∂
xk
∂
xi )x
°
i , v >
d/dt
∂
T/
∂
x
°
k -
∂
T/
∂
xk = < (
∂
2r/
∂
xk
∂
xi )x
°
i , v > + w
k (t) - < (
∂
2r/
∂
xk
∂
xi )x
°
i , v > = w
k (t) c.b.d.u
Wykorzystaliśmy w powyższych obliczeniach : rozkład (2.48) wektora prędkości , zasadę Leibniza dla
różniczkowania iloczynu skalarnego, symetryczność iloczynu skalarnego oraz niezalelożnością od kolejności
różniczek cząstkowych. ►
Przykład. Rozpatrzmy współrzędne biegunowe na płaszczyźnie : x1 = r , x2 =
ϕ
.
Rozkład wektora prędkości (2.48) względem bazy lokalnej współrzędnych biegunowych {
∂
/
∂
r, p/
∂ϕ
} ma
postać :
v = r
°
∂
/
∂
r +
ϕ°
∂
/
∂ϕ
Wykorzystując (2.42) zapiszemy energię kinetyczną we współrzędnych biegunowych następująco :
T(r,
ϕ
, r
°
,
ϕ°
) = ½ (
∂
/
∂
r r
°
+
∂
/
∂ϕ
ϕ
°
) = ½ ( r
°
2 + r2
ϕ°
2 )
Zgodnie ze wzorem (2.49) obliczamy kowariantne składowe przyspieszenia : w1 = wr i w2 = w
ϕ
:
wr = d/dt (
∂
T/
∂
r
°
) -
∂
T/
∂
r = d/dt (r
°
) – r
ϕ°
2 = r
°°
- r
ϕ°
2
w
ϕ
= d/dt (
∂
T/
∂ϕ°
) -
∂
T/
∂ϕ
= d/dt (r2
ϕ°
) = r 2
ϕ°°
+ 2 r r
°ϕ
°
Kontrawariantne składowe przyspieszenia można otrzymać z kowariantnych poprzez operacje podniesienia
indeksu :
( w1 ) = ( g11 , g12 ) ( w1 )
( w2 ) = ( g21 , g22 ) ( w2 )
( wr ) = ( 1 , 0 ) ( wr ) = ( r
°°
- r
ϕ°
2 )
( w
ϕ
) = ( 0 , r-2 ) ( w
ϕ
) (
ϕ°°
- 2 r
ϕ°
/ r )

41
2.4.2 Równanie Newtona we współrzędnych krzywoliniowych (równania Lagrange’a)
W ramach mechaniki klasycznej ruch punktu materialnego o masie m w przestrzeni euklidesowej En o
wymiarze n = 1,2,3 opisuje się następującym równaniem różniczkowym wektorowym :
m r
°°
= F ( 2.50)
zwanym równaniem dynamiki Newtona.
r – jest wektorem wodzącym punktu, r
°°
- przyspieszeniem punktu , F = F(r, r
°
, t) – zewnętrznym polem sił.
Niech ( x1 , ... ,xn ) – będzie regularnym układem współrzędnych na zbiorze otwartym U
⊂
En ,
{
∂
/
∂
x1, ... ,
∂
/
∂
xn } – baza lokalna tego układu współrzędnych, T – energia kinetyczna,
T( x , x
°
) = ½ m gik (x) x
°°°°
i x
°°°°
k gdzie :
gik = <
∂
/
∂
xi ,
∂
/
∂
xk >
F1 , … , Fn i F1 , … ,Fn – są odpowiednio składowymi kontrawariantnymi i kowariantnymi F w bazie :
{
∂
/
∂
x1, ... ,
∂
/
∂
xn } tj. :
F = Fk
∂
/
∂
xk = F1
∂
/
∂
x1 + … + Fn
∂
/
∂
xn
Fk = <
∂
/
∂
xk , F > ; k = 1 .. .n
(w mechanice Fk nazywamy „siłami uogólnionymi” )
Z (2.49) wynika, że rzut : mwk - wektora : mw = m r
°°
, na wektor bazowy
∂
/
∂
xk, może być obliczony zgodnie
ze wzorem :
m wk = d/dt (
∂
T/
∂
x
°
k )
−
∂
T/
∂
xk
(ponieważ m = const. , możemy m wyprowadzić poza znak różniczki ).
Dlatego równanie Newtona (2.50) w składowych kowariantnych zapiszemy w następujący sposób :
d/dt (
∂
T/
∂
x
°
k )
−
∂
T/
∂
xk = Fk ; k = 1 ... n (2.51)
W mechanice równania (2.51) nazywamy równaniami Lagrange’a drugiego rodzaju.
W znacznej części zagadnień mechaniki pole siłowe F jest polem potencjalnym tj. :
a) F nie zależy od czasu i prędkości punktu :
F = F (r) lub co na jedno wychodzi :F = F (x1 , ... ,xn )
b) Istnieje gładka funkcja V , przyjmującą wartości w zbiorze R (nazywana „energią potencjalną” )
F =
−
grad V
⇔
Fk =
−
∂
V/
∂
xk ; k= 1 ... n
W tym przypadku układ równań (2.51) może być przedstawiony w postaci :
d/dt (
∂
L/
∂
x
°
k )
−
∂
L/
∂
xk = 0 ; k = 1 ... n (2.52)
gdzie L – jest tzw. funkcją Lagrange’a : L (x, x
°
) = T( x , x
°
) – V (x )
◄d/dt (
∂
L/
∂
x
°
k )
−
∂
L/
∂
xk = d/dt (
∂
T/
∂
x
°
k )
−
∂
T/
∂
xk +
∂
V/
∂
xk = d/dt (
∂
T/
∂
x
°
k )
−
∂
T/
∂
xk
−−−−
Fk = 0 ►
W mechanice równanie (2.52) przyjęto nazywać „równaniem Lagrange’a drugiego rodzaju“.
Ćwiczenie. Zapiszcie równania Lagrange’a (2.51) i (2.52) we współrzędnych biegunowych na płaszczyźnie dla
przypadku w którym :
F (r) =
−
γ
m / | r3 | ,
γ
= const.
(jest to przypadek newtonowskiego pola grawitacyjnego )

42
3. Różniczkowanie zewnętrzne
W tym rozdziale zakładamy , że wszystkie układy współrzędnych są regularnymi o klasie gładkości w skrajnym
przypadku co najmniej C2. Funkcje i pola tensorowe również są gładkie o klasie gładkości co najmniej C2.
3.1 Definicja i własności różniczkowania zewnętrznego
Niech U – będzie zbiorem otwartym w n- wymiarowej rzeczywistej przestrzeni afinicznej , P
∈
Λ
k (U) – jest
k-formą różniczkową na U. Niech x = (x1, ... ,xn ) – będzie regularnym w U , układem współrzędnych oraz :
P =
ΣΣΣΣ
Pi1… ik dx
i1
∧
…
∧
dxik na U
i1<…< ik
Definicja. Różniczką zewnętrzną (lub pochodną zewnętrzną ) k-formy różniczkowej P nazywamy (k+1)- formę
dP, określoną równaniem :
dP = d (
ΣΣΣΣ
Pi1… ik dx
i1
∧
…
∧
dxik ) =
ΣΣΣΣ
(dPi1… ik )
∧
dxi1
∧
…
∧
dxik =
ΣΣΣΣ
(
∂
Pi1… ik /
∂
x
α
)
i1<…< ik i1<…< ik i1<…< ik
dx
α
∧
dxi1
∧
…
∧
dxik (3.1)
Uwaga. Wygodnie jest zdefiniować różniczkę zewnętrzną 0-formy tj. funkcji gładkiej f : U
→
R jako 1-formę
różniczkową :
df = (
∂
f/
∂
x
α
) dx
α
■
Definicja (3.1) jak za chwilę się przekonamy , nie zależy w istocie od wyboru współrzędnych (x1, ... ,xn ).
Odwzorowanie d , przeprowadzające , zgodnie z (3.1) formy różniczkowe w formy różniczkowe o stopień
wyższe niż wejściowe , nazywamy operatorem różniczkowania zewnętrznego.
Łatwo sprawdzić , że operator różniczkowania zewnętrznego jest operatorem liniowym tj. :
d (P + Q) = dP + dQ (3.2)
d ( c
•
P ) = c
•
d P (3.3)
dla dowolnych k-form różniczkowych P, Q I dla dowolnego c
∈
R .
◄ W istocie, mamy :
(P + Q)i1… ik = Pi1… ik + Qi1… ik I dlatego :
d [ (P + Q )i1… ik ] = dPi1… ik + dQi1… ik oraz
d ( P + Q) =
ΣΣΣΣ
( Pi1… ik + Qi1… ik )
∧
dxi1
∧
…
∧
dxik =
ΣΣΣΣ
[(d Pi1… ik )
∧
dxi1
∧
…
∧
dxik +
i1<…< ik i1<…< ik
+ (d Qi1… ik )
∧
dxi1
∧
…
∧
dxik ] =
ΣΣΣΣ
( Pi1… ik )
∧
dxi1
∧
…
∧
dxik +
ΣΣΣΣ
[(d Qi1… ik )
∧
dxi1
∧
…
∧
dxik =
i1<…< ik i1<…< ik
= dP + dQ.
Własność (3.3) dowodzimy analogicznie. ►
Twierdzenie 3.1 Istnieje tylko jeden jedyny liniowy operator d, przeprowadzający formy różniczkowe w formy
różniczkowe których stopień jest o jeden większy niż stopień formy wejściowej , dla którego spełnione są
następujące tożsamością :
d ( P + Q) = dP
∧
dQ + (
−
1)deg P
•
P
∧
dQ (3.4)
d ( dP) = 0 (3.5)
I przy tym dla dowolnych współrzędnych regularnych x = (x1, ... ,xn ) słuszne jest równanie (3.1)
◄ Udowodnimy istnienie operatora d, charakteryzującego się własnościami (3.2), (3.3) i (3.4), (3.5). W tym celu
ustalimy regularny układ współrzędnych x = (x1, ... ,xn ) i określimy d zależnością (3.1).
Liniowość d, tj. własności (3.2) i (3.3) już została udowodniona. Udowodnimy teraz „zasadę Leibniza” (3.4).
Niech : deg P = k , deg Q = m. Rozpatrzymy na początku przypadek szczególny kiedy formy P i Q mają
następującą prostą postać :
P = f
•
dxi1
∧
…
∧
dxik , Q =
ϕ
•
dxj1
∧
…
∧
dxjn

43
gdzie f,
ϕ
: U
→
R – funkcje gładkie
Jeśli posród indeksów i1, ... , ik ; j1, …, jn jest chociażby jeden powtarzający się (oznaczmy go przykładowo
α
) to składnik dx
α
powtórzy się w skrajnym przypadku dwukrotnie zarówno w iloczynie P
∧
Q jak i w
iloczynach dP
∧
Q i P
∧
dQ. Zatem w tym przypadku obie części równości (3.4) są równe zeru , a zatem nie ma
czego dowodzić.
Dlatego też w dalszej kolejności będziemy uważać , że pośród indeksów i1, ... , ik ; j1, …, jn nie ma dwóch
jednakowych. Uporządkujmy te indeksy wzrastająco i oznaczmy wynik tego uporządkowania przez :
(
α
1, ... ,
α
k + n ). Wtedy możemy zapisać :
P
∧
Q = f
•
ϕ
•
dxi1
∧
…
∧
dxik
∧
dxj1
∧
…
∧
dxjn = s
•
f
•
ϕ
•
dx
α
1
∧
dx
α
k + n
gdzie :
s = sign ( i1 … ik , j1 … jn )
(
α
1 …
α
k ,
α
k + 1 …
α
k + n )
Wykorzystując wzory (3.1) jak również wzory Leibniza dla obliczenia różniczki iloczynu dwóch funkcji ,
otrzymamy :
d ( P
∧
Q ) = s
•
d ( f
•
ϕ
)
∧
dx
α
1
∧
…
∧
dx
α
k + n = s
•
(df
•
ϕ
+ f
•
d
ϕ
)
∧
dx
α
1
∧
…
∧
dx
α
k + l =
= s
•
(df
•
ϕ
)
∧
dx
α
1
∧
dx
α
k + n + s
•
(f
•
d
ϕ
)
∧
dx
α
1
∧
dx
α
k + n = (df
∧
dxi1
∧
dxik )
∧
∧
(
ϕ
•
dxj1
∧
dxjn ) + dx
α
1
∧
dx
α
k + n + f
•
d
ϕ
∧
dxi1
∧
…
∧
dxik
∧
dxj1
∧
…
∧
dxjn =
= dP
∧
Q + (-1)k
•
f
•
dxi1
∧
…
∧
dxik
∧
d
ϕ
∧
dxj1
∧
…
∧
dxjn = dP
∧
Q + (-1)k
•
P
∧
dQ
( składnik (-1)k pojawia się z tego powodu , że przestawiliśmy składnik d
ϕ
z k –składnikami
dxi1
∧
…
∧
dxik )
Zatem własność (3.4) jest udowodniona dla form różniczkowych o wskazanej powyżej prostej postaci.
Rozpatrzymy teraz przypadek ogólny.
Niech formy różniczkowe P
∈
Λ
k (U) i Q
∈
Λ
m (U) mają postać :
P =
ΣΣΣΣ
Pi1 … ik dx
i1
∧
…
∧
dxik ; Q =
ΣΣΣΣ
Qj1 … jk dx
j1
∧
…
∧
dxjk
i1<…< ik j1<…< jk
Wprowadzimy w celu uproszczenia zapisu następujące oznaczenia :
I = (i1 ,…, ik ) , 1
≤
i1<…< ik
≤
n
J = (j1 ,…, jm ) , 1
≤
j1<…< jm
≤
n
PI = Pi1 ... ik dx
i1
∧
…
∧
dxik ; QJ = Qj1 ... jm dx
j1
∧
…
∧
dxjm
(nie stosujemy umowy sumacyjnej ), za pomocą tych oznaczeń możemy zapisać :
P =
ΣΣΣΣ
PI ; Q =
ΣΣΣΣ
QJ
I J
(sumowanie prowadzimy po wszystkich możliwych zbiorach indeksów I, J wskazanej postaci )
Dzięki własności łączności iloczynu zewnętrznego względem dodawania możemy opuścić nawiasy w iloczynie :
P
∧
Q = (
ΣΣΣΣ
PI )
∧
(
ΣΣΣΣ
QJ ) =
ΣΣΣΣ
ΣΣΣΣ
PI
∧
QJ
I J I J
Zróżniczkujemy ostatnią równość, a następnie wykorzystamy własność (3.2), jak również słuszność
własności (3.4) dla iloczynu
PI
∧
QJ :
d (P
∧
Q ) = d (
ΣΣΣΣ
ΣΣΣΣ
PI
∧
QJ ) =
ΣΣΣΣ
ΣΣΣΣ
d (PI
∧
QJ ) =
ΣΣΣΣ
ΣΣΣΣ
(d PI
∧
QJ + (-1)
k
ΣΣΣΣ
ΣΣΣΣ
PI
∧
dQJ =
I J I J I J I J
= (
ΣΣΣΣ
PI )
∧
(
ΣΣΣΣ
QJ ) + (-1)
k (
ΣΣΣΣ
PI )
∧
(
ΣΣΣΣ
QJ ) = dP
∧
Q + (-1)k
P
∧
dQ
I J I J
Przejdziemy teraz do dowodu własności (3.5) . Dla 0-formy tj. funkcji gładkich f : U - > R , jest on łatwy :
df = (
∂
f/
∂
xj ) dxj , ddf = d (
∂
f/
∂
xj )
∧
dxj = (
∂
2f /
∂
xi
∂
xj) dxi
∧
dxj =
ΣΣΣΣ
(
∂
2f /
∂
xi
∂
xj) dxi
∧
dxj +
i < j
+
ΣΣΣΣ
(
∂
2f /
∂
xj
∂
xi) dxj
∧
dxi =
ΣΣΣΣ
[ (
∂
2f /
∂
xi
∂
xj) – (
∂
2f /
∂
xj
∂
xi) ] dxj
∧
dxi = 0
i < j i < j

44
Przypadek ogólny może być sprowadzony do wskazanego przypadku szczególnego.
Mamy bowiem zgodnie z (3.1) i na mocy własności łączności (3.2) :
dd (
ΣΣΣΣ
Pi1 … ik dx
i1
∧
…
∧
dxik = d (
ΣΣΣΣ
(dPi1 … ik ) dx
j1
∧
…
∧
dxjk ) =
i1<…< ik i1<…< ik
=
ΣΣΣΣ
d [ (dPi1 … ik ) dx
j1
∧
…
∧
dxjk ]
i1<…< ik
Stosując kolejno „zasadę Leibniza” (3.4) do wyrażenia : d [ (dPi1 … ik ) dx
j1
∧
…
∧
dxjk ]
otrzymamy sumę złożoną z (k + 1) składowych , z których każda zawiera albo składnik ddPi1 … ik albo
składnik postaci ddxi . Własność (3.5) jest zatem udowodniona.
Udowodnimy teraz jedyność operatora d charakteryzującego się własnościami (3.2) – (3.5).
Niech d – będzie pewnym takim wskazanym operatorem. Niech (x1, ... ,xn ) – będzie dowolnym ,regularnym
układem współrzędnych oraz :
P =
ΣΣΣΣ
Pi1 … ik dx
j1
∧
…
∧
dxjk
i1<…< ik
Na mocy własności (3.2) :
dP =
ΣΣΣΣ
d (Pi1 … ik dx
i1
∧
…
∧
dxik )
i1<…< ik
na mocy własności (3.4) :
d (Pi1 … ik dx
j1
∧
…
∧
dxjk ) = ( dPi1 … ik ) dx
i1
∧
…
∧
dxik + składowe ze składnikami postaci ddxi , które
są równe zeru na mocy własności (3.5).
Zatem następstwem własności (3.2) – (3.5) jest wzór (3.1).
Zauważmy ,że przy okazji udowodniliśmy niezależność prawej strony (3.1) od wyboru współrzędnych
x1, ... ,xn . W istocie, jeśli obliczenia prowadzone w różnych możliwych współrzędnych prowadziły do różnych
wyników to mielibyśmy dwa różne operatory d, spełniające warunki (3.2) – (3.5). Jednak jak to obliczyliśmy
taki operator jest tylko jeden. ►
Uwaga. Dla przypadku w którym P = f – jest 0-formą, wzór (3.4) przyjmuje postać :
d ( f
•
Q ) = df
∧
Q + f
•
dQ (3.6)
Ściśle mówiąc , dla tego przypadku dowód wzoru (3.4) należy przeprowadzić osobno.
Ćwiczenie 1. Wyprowadzić (3.6) z (3.1) i zasady Leibniza : d ( f
•
ϕ
) = df
•
ϕ
+ f
•
d
ϕ
(f,
ϕ
- > R )
Ćwiczenie 2. Sprawdzić słuszność następującego uogólnienia wzoru (3.4) :
d ( P1
∧
…
∧
Pm ) = dP1
∧
P2
∧
…
∧
Pm + (-1)k1
•
P1
∧
dP2
∧
P3
∧
…
∧
Pm + (-1) k1 + k2
•
P1
∧
P2
∧
dP3
∧
∧
P4
∧
...
∧
Pm + ... + (-1) k1 + ... + km-1
•
P1
∧
...
∧
Pm-1
∧
dPm (3.7)
gdzie : k1= deg P
i , i = 1 .. m
Podpowiedź : dowodzić za pomocą indukcji po m
Teraz zajmiemy się prawą częścią (3.1) w postaci standardowego rozkładu względem (k + 1)-form bazowych
dxj1
∧
…
∧
dxjk+1 . Rozkład ten ma postać :
k +1
dP =
ΣΣΣΣ
d ( Pi1 … ik dx
i1
∧
…
∧
dxik ) =
ΣΣΣΣ
(
ΣΣΣΣ
(
−
1) m -1 [ (
∂
Pj1 … jm-1 jm+1...jk+1 ) /
∂
xjm ]
i1<…< ik i1<…< ik m=1
dxj1
∧
…
∧
dxik +1 (3.8)

45
◄ Tymczasowo oznaczmy prawą stronę (3.8) przez
δ
P i udowodnimy, że :
δ
P = dP
Na początku rozpatrzmy przypadek szczególny , kiedy k-forma różniczkowa P ma postać :
P = f
•
dx
α
1
∧
…
∧
dx
α
k (3.9)
gdzie : f : U
→
R – jest funkcją gładką oraz 1
≤
α
1<…<
α
k
≤
n .
Inaczej mówiąc :
P =
ΣΣΣΣ
Pi1 … ik dx
j1
∧
…
∧
dxjk
i1<…< ik
gdzie :
Pi1 … ik = { f ; jeżeli (i1…ik ) = (
α
1…
α
k )
{ 0 ; w przypadku przeciwnym
Przeanalizujmy sumy w prawej części równości (3.8). Składowe dla których ( j1…jm-1 , jm+1…jk+1 )
≠
≠
(
α
1…
α
k ) są równe zeru. Pozostałe składowe mają postać :
(-1) m -1 (
∂
f /
∂
xjm ) dx
α
1
∧
…
∧
dx
α
m-1
∧
dxjm
∧
dx
α
m
∧
…
∧
dx
α
k = (
∂
f/
∂
xjm ) dxjm
∧
dx
α
1
∧
….
∧
dx
α
k
(aby otrzymać prawą część ostatniego równania z lewej przestawiliśmy składnik
∂
xjm z każdym z m-1
składników dx
α
1
∧
…
∧
dx
α
m-1 co dało właśnie (-1) m -1 )
I dalej, jeśli jm
∈
(
α
1…
α
k ) to iloczyn dx
jm
∧
dx
α
1
∧
….
∧
dx
α
k jest równy zeru. Dlatego :
δ
P =
ΣΣΣΣ
(
∂
f /
∂
xj ) dxj1
∧
dx
α
1
∧
dx
α
1
∧
….
∧
dx
α
k , A = { 1,…,n}/ {
α
1…
α
k }
j
∈
A
Przy czym ostatnie równanie pozostanie prawdziwe jeśli do jego prawej strony dodamy zerowe składowe :
n n
δ
P =
ΣΣΣΣ
(
∂
f /
∂
xj ) dxj1
∧
dx
α
1
∧
dx
α
1
∧
….
∧
dx
α
k = [
ΣΣΣΣ
(
∂
f /
∂
xj ) dxj1]
∧
dx
α
1
∧
….
∧
dx
α
k =
j =1 j = 1
= df
∧
dx
α
1
∧
….
∧
dx
α
k = dP
(wykorzystaliśmy tutaj łączność iloczynu zewnętrznego względem dodawania) Udowodniliśmy zatem równość
δ
P = dP, dla form różniczkowych postaci (3.9). Przypadek ogólny łatwo sprowadzić do powyższego jeżeli
uwzględnić następujące dwie uwagi. Po pierwsze, prawa strona (3.8) jest przechodnia P:
δ
(P + Q ) =
δ
(P) +
δ
(Q)
(jest tak ponieważ pochodna cząstkowa sumy jest równa sumie pochodnych cząstkowych a iloczyn zewnętrzny
jest łączny względem dodawania ) Po drugie, dowolna forma różniczkowa jest sumą form różniczkowych
postaci (3.9). Mamy zatem :
δ
P =
δ
(
ΣΣΣΣ
Pi1 … ik dx
i1
∧
….
∧
dxik ) =
ΣΣΣΣ
δ
( Pi1 … ik dx
i1
∧
….
∧
dxik ) =
ΣΣΣΣ
d ( Pi1 … ik dx
i1
∧
….
∧
dxik )
i1<…< ik i1<…< ik i1<…< ik
= dP ►
Zapiszemy teraz pewne szczególne przypadki wzoru (3.8) (dla 1-form i 2-form różniczkowych ):
d ( Pi dx
i ) =
ΣΣΣΣ
[ (
∂
Pj /
∂
xi)
−
(
∂
Pi /
∂
xj ) dxi
∧
dxj (3.10)
d (
ΣΣΣΣ
Pij dx
i
∧
dxj ) =
ΣΣΣΣ
[ (
∂
Pjk /
∂
xi) (
∂
Pik /
∂
xj ) + (
∂
Pij /
∂
xk)] dxi
∧
dxj
∧
dxk (3.11)
i<j i<j<k
3.1.1 Przykład : warunki Cauch'ego – Riemanna w języku różniczkowania zewnętrznego
Rozpatrzmy płaszczyznę C – dla zmiennej zespolonej z = x + iy, jako dwuwymiarową rzeczywistą przestrzeń
afiniczną ze współrzędnymi (x, y). Zespoloną k-formę różniczkową ( k =1,2) na C określimy jako sumę :
A + iB
w której A i B są zwykłymi rzeczywistymi k-formami różniczkowymi na C. Zgodnie z tą definicją mamy :
d ( A + i B) = dA + i dB
Każdej funkcji f = u + iv zmiennej zespolonej z = x + iy ; ( u =Re(f ), v = Im(f) ) przypiszemy 1-formę
różniczkową :
f
•
dz = (u + iv )
•
( dx + idy )
46
Obliczmy różniczkę zewnętrzną tej formy różniczkowej (funkcje f uważamy za funkcje R- różniczkowalną tj.
zakładamy , że funkcje u(x, y) i v(x, y) są różniczkowalne zgodnie z pojęciem różniczkowalności w analizie
rzeczywistej ). Wykorzystując wzory (3.6) i własność (3.5) znajdujemy :
d(f dz) = d(u + iv)
∧
(dx + idy) + (u +iv)
∧
d(dx + idy) = (du + idv)
∧
(dx + idy)= [(
∂
u/
∂
x )dx + (
∂
u/
∂
y)dy +
+ i(
∂
v/
∂
x)dx + i(
∂
v/
∂
y)dy )]
∧
(dx + idy) = { - (
∂
u/
∂
y) – (
∂
v/
∂
x) + i [(
∂
u/
∂
x) – (
∂
v/
∂
y) ]} dx
∧
dy
2-forma różniczkowa w prawej części ostatniego równania zeruje się w tych i tylko tych punktach w których
spełniony jest warunek :
∂
u/
∂
x =
∂
v/
∂
y ;
∂
u/
∂
y =
−
∂
v/
∂
x
Są to znane z wykładu teorii funkcji zmiennej zespolonej warunki Cauch’ego-Riemanna (niekiedy zwane
warunkami Dalamberta –Eulera).
Wniosek : funkcja f zmiennej zespolonej z = x + iy jest analityczna wtedy i tylko wtedy jeżeli jest ona
R-różniczkowalna i d(f dz) = 0
3.2 Operatory analizy wektorowej w języku różniczkowania zewnętrznego
3.2.1 Dywergencja pola wektorowego
Niech P – będzie n wymiarową rzeczywistą przestrzenią afiniczną , stowarzyszoną z przestrzenią wektorową V ,
Ω
∈
Λ
n (V) – jest formą objętości na V.
Dla zadanego na podzbiorze otwartym przestrzeni P gładkiego pola wektorowego Y rozpatrzymy n-formę
różniczkową :
d*Y
gdzie * : X(V) =
Λ
-1(V)
→
Λ
n-1 (V) – jest operatorem Hodge’a formy objętości
Ω
; d – jest operatorem
różniczkowania zewnętrznego.
Ponieważ przestrzeń liniowa
Λ
n-1 (V) jest jednowymiarowa , to n-formy (d*Y )p i
Ω
są proporcjonalne w
każdym punkcie p obszaru określoności pola wektorowego Y.
Definicja. Współczynniki proporcjonalności (zapisywane jako składniki przy
Ω
) nazywamy „dywergencją”
pola wektorowego Y i oznaczane są : div Y. Zatem zgodnie z definicją mamy :
d*Y = (div Y )
•
Ω
(3.12)
Funkcja div Y , p |
→
(div Y) (p) zależy nie tylko od pola wektorowego Y ale również od formy objętości
Ω
.
Podkreślając ten fakt piszemy : div
Ω
Y lub (div Y )
Ω
■
Zapiszemy wyrażenie dla dywergencji w dowolnych regularnych współrzędnych (x1, … x
n ), których obszar
określoności zawiera obszar określoności pola Y. Niech :
Ω
= ω dx1
∧
…
∧
dxn ; Y = Yk
∂
/
∂
xk ,
wtedy :
div Y = (1/ω)
∂
(ωYk ) /
∂
xk =
∂
Yk /
∂
xk + (1/ω) Y(ω) =
∂
Yk/
∂
xk + Y (ln ( |ω| )) (3.13)
◄ W celu udowodnienia (3.13) zapiszemy równość (3.12) we współrzędnych (x1, … xn ).
Mamy :
*Y = ωk i1 … in-1 Y
k dxi1
⊗
...
⊗
dxin-1k =
ΣΣΣΣ
ω
ε
k i1 … in-1 Y
k dxi1
∧
….
∧
dxin-1
i1<…< in-1
Jeśli k, i1…in-1
∈
{ 1 ... n } i i1<…< in-1 to składnik
ε
k i1 … in-1 jest różny od zera tylko przy :
( i1…in-1 ) = ( 1 , ... ,k-1 , k+1, ... , n )
tj. różnymi od zera symbolami Levi-Civity będą tylko :
ε
k1… (k-1)(k+1)…n = (-1)
k-1
Dlatego :
*Y =
ΣΣΣΣ
(-1)k-1ω Yk dx1
∧
….
∧
dxk-1
∧
dxk+1
∧
….
∧
dxn
k=1

47
Różniczkując ostatnie równanie z pomocą (3.1) i wykorzystując ten fakt, że dxi
∧
dxi = 0 , mamy :
n
d*Y =
ΣΣΣΣ
(-1)k-1d (ω Yk ) dx1
∧
….
∧
dxk-1
∧
dxk+1
∧
….
∧
dxn =
k=1
n
=
ΣΣΣΣ
(-1)k-1
∂
(ω Yk ) /
∂
xk dxk
∧
dx1
∧
….
∧
dxk-1
∧
dxk+1
∧
….
∧
dxn =
k=1
n
= (
ΣΣΣΣ
∂
(ω Yk ) /
∂
xk ) dx1
∧
….
∧
dxn =
∂
(ω Yk ) /
∂
xk ) dx1
∧
….
∧
dxn
k=1
Porównując równości :
d*Y = [
∂
(ω Yk ) /
∂
xk ] dx1
∧
….
∧
dxn oraz d*Y = (div Y) ω dx1
∧
….
∧
dxn
wnioskujemy, że :
div Y = (1/ω)
∂
(ω Yk ) /
∂
xk
tj. otrzymaliśmy pierwsze równanie z (3.13).
Dalej :
(1/ω)
∂
(ω Yk ) /
∂
xk = (1/ω) [ (
∂
Yk /
∂
xk ) ω + Yk (
∂
ω /
∂
xk ) ] = (
∂
Yk /
∂
xk ) + (1/ω) Yk (
∂
ω /
∂
xk ) =
= (
∂
Yk /
∂
xk ) + (1/ω) Y (ω) ;
(1/ω) Y (ω) = (1/ω) Yk (
∂
ω /
∂
xk ) = Yk (1/ω)(
∂
ω /
∂
xk ) = Yk [
∂
ln ( | ω | ) /
∂
xk ] = Y (ln ( | ω | )
co kończy dowód (3.13). ►
Niech teraz na V ustalona będzie pewna orientacja i
Ω
g – będzie metryczną formą objętości wynikającą z tensora
metrycznego g = gij dx
i
⊗
dxj . Wtedy :
| g11 ... g1n |
Ω
g =
±
sqrt ( |
γ
| )dx1
∧
….
∧
dxn , gdzie :
γ
= | ................. |
|gn1... gnn |
tj. ω =
±
√
|
γ
| ( „+“ – jeśli współrzędne x1…. xn są dodatnio zorientowane ; „-„ – jeśli ujemnie)
wzory (3.13) możemy dla tego przypadku przepisać w postaci :
div Y = ( 1/
√
|
γ
| ) (
∂
ln ( | ω | ) /
∂
xk = ( Yk /
∂
xk ) + ( 1/
√
|
γ
| ) Y
√
|
γ
| = ( Yk /
∂
xk )+
+ ½ Y (ln ( |
γ
| ) (3.14)
Ćwiczenie. Sprawdzić następujące własności dywergencji :
div ( X + Y ) = div X + div Y (3.15)
div ( f
•
Y ) = X (f) + f
•
div Y (3.16)
gdzie : X, Y – pola wektorowe , f – funkcja zmiennej rzeczywistej.
3.2.2 Operator Laplace’a
Niech P – będzie n wymiarową, rzeczywistą przestrzenią afiniczną stowarzyszoną z zorientowaną przestrzenią
wektorową V ; g – tensorem metrycznym na V ;
Ω
g – formą objętości związaną z tym tensorem.
Definicja. Odwzorowanie
∆
, przeprowadzające funkcje gładką f o wartościach w R w funkcje
∆
f zgodnie z
zasadą :
∆
f = div
Ω
g (grad f ) (3.17)
nazywamy operatorem Laplace’a lub laplasjanem. ■
Podkreślimy ,że operator Laplace’a istotnie zależy od wyboru tensora metrycznego g (ponieważ g określa
zarówno operator grad jak i formę objętości
Ω
g )

48
Zapiszmy (3.17) w dowolnych współrzędnych regularnych (x1, … x
n ) . Wstawiając do pierwszego z równań
(3.14) :
Yk = gik (
∂
f /
∂
xj )
gdzie : gik –składowe kontrawariantnego tensora metrycznego we wprowadzonych współrzędnych, otrzymamy :
∆
f = ( 1/
√
|
γ
| )
∂
(
√
|
γ
| gik (
∂
f/
∂
xj ) /
∂
xk (3.18)
Wykorzystując pozostałe dwie równości w (3.14), możemy otrzymać inne wyrażenie dla
∆
f zapisane we
współrzędnych. Pozostawiamy to jednak czytelnikowi do samodzielnego wykonania.
Ćwiczenie. Sprawdzić następujące własności laplasjanu :
∆
( f +
ϕ
) =
∆
f +
∆ϕ
(3.19)
∆
( f
•
ϕ
) =
∆
f
•
ϕ
+ f
•
∆ϕ
+ 2g (grad f , grad
ϕ
) (3.20)
∆
( u
°
f ) = ( u’
°
f )
∆
f + (u’’
°
f )
•
(grad f ) f (3.21)
gdzie : f,
ϕ
: U
→
R – są funkcjami gładkimi ; u : J
→
R - funkcja gładka i J
⊂
R – jest zbiorem otwartym
zawierającym w sobie zbiór f (U) ; u’ , u’’ – pierwsza i druga pochodna funkcji u.
3.2.3 Rotacja pola wektorowego
Niech E3 – będzie trójwymiarową zorientowaną przestrzenią Euklidesa,
Ω
g – formą objętości związaną z
euklidesowym tensorem metrycznym g.
Definicja. Rotacją (wirowością ) pola wektorowego Y
∈
X (E3) nazywamy pole wektorowe :
rot Y = * dY (3.22)
(w literaturze anglojęzycznej zamiast oznaczenia „rot” stosuje się oznaczenie „curl” )
gdzie: Y – 1-forma różniczkowa stowarzyszona z polem wektorowym Y ; d – operator różniczkowania
zewnętrznego ; * - operator Hodge’a formy objętości
Ω
*g (przeprowadzający 2-formy w wektory) ■
Zapiszemy (3.22) w dowolnych regularnych współrzędnych (x1, x2 ,x3 ) obszar określoności których zawiera
obszar określoności pola Y. Zakładamy , że współrzędne te na całym obszarze określoności U , są albo dodatnio
albo ujemnie zorientowane (tak będzie oczywiście jeżeli U jest zbiorem spójnym)
Niech :
Y = Yk
∂
/
∂
xk
g = gij dx
i
⊗
dxj
Yj = gjk Y
k (tj. Y = Y
j dx
j )
| g11 g12 g13 |
γ
= | g21 g22 g23 |
| g31 g32 g33 |
Wtedy :
rot Y =
±
(
ε
ijk /
√
|
γ
| ) (
∂
Yj/
∂
xi )
∂
/
∂
xk =
±
( 1/
√
|
γ
| ) {[ (
∂
Y3 /
∂
x2 ) – (
∂
Y2 /
∂
x3 )]
∂
/
∂
x1 +
+ [(
∂
Y1 /
∂
x3 ) – (
∂
Y3 /
∂
x1 )]
∂
/
∂
x2+ [(
∂
Y2 /
∂
x1 ) – (
∂
Y1 /
∂
x2 )]
∂
/
∂
x3 } (3.23)
Znak “+” – odpowiada dodatniej orientacji współrzędnych, znak „ -„ ujemnej.
◄ Z pomocą (3.10) znajdujemy :
3
dY =
ΣΣΣΣ
[ (
∂
Yj /
∂
xi ) – (
∂
Yi /
∂
xj )] dxi
∧
dxj =
ΣΣΣΣ
[ (
∂
Yj /
∂
xi ) – (
∂
Yi /
∂
xj )] dxi
⊗
dxj
i<j i ,j=1
I dalej, ponieważ :
Ω
g =
±
√
|
γ
| dx1
∧
dx2
∧
dx3 , to :
Ω
*g =
±
( 1/
√
|
γ
| )
∂
/
∂
x1
∧
∂
/
∂
x2
∧
∂
/
∂
x3 oraz :
*dY = ½ tr (1,2)(1,2) (
Ω
*g
⊗
dY) =
±
( 1/
√
|
γ
| )
ε
ijk [ (
∂
Yj /
∂
xi ) – (
∂
Yi /
∂
xj )]
∂
/
∂
xk =
=
±
(1/
√
|
γ
| ) [ ( ½
ε
ijk
∂
Yj /
∂
xi ) – ( ½
ε
jik
∂
Yi /
∂
xj )]
∂
/
∂
xk =
±
(
ε
ijk /
√
|
γ
| ) (
∂
Yj /
∂
xi )
∂
/
∂
xk ►

49
Definicja. Laplasjanem wektorowym nazywamy odwzorowanie
∆
przeprowadzające pole wektorowe Y w
trójwymiarowej zorientowanej przestrzeni Euklidesa na pole wektorowe
∆
Y zgodnie z następującym wzorem :
∆
Y = grad div Y – rot rot Y ■ (3.24)
Ćwiczenie. Sprawdzić , że we współrzędnych kartezjańskich (x, y ,z) słuszna jest następująca tożsamość :
∆
( P
∂
/
∂
x + Q
∂
/
∂
y + R
∂
/
∂
z =
∆
P
•
∂
/
∂
x +
∆
Q
•
∂
/
∂
y +
∆
R
•
∂
/
∂
z (3.25)
3.2.4 Pewne tożsamości analizy wektorowej jako konsekwencja własności pochodnej
zewnętrznej
W tradycyjnym wykładzie analizy wektorowej dowodzi się następujących tożsamości :
div
°
rot = 0 (3.26)
rot
°
grad = 0 (3.27)
Pokażemy teraz że tożsamości te są prostymi konsekwencjami tożsamości (3.5) : d
°
d = 0
Oczywiście mówimy o trójwymiarową przestrzeń Euklidesa. Euklidesowy tensor metryczny będziemy oznaczali
nawiasami : < . , . > ; metryczną formę objętości przez
Ω
.
Przez G(Y) oznaczymy jak zwykle 1-formę stowarzyszoną z wektorem Y. Przypominamy , że odwzorowanie G
jest liniowe.
◄ Udowodnimy (3.26). Na mocy definicji dywergencji (3.12), definicji rotacji (3.22) i tożsamości (3.5) dla
dowolnego pola wektorowego Y mamy :
(div rot Y )
•
Ω
= d*rot Y = d ** G (Y) = ddG(Y) = 0
zatem div rot Y = 0. Wykorzystaliśmy tu jeszcze ten fakt, że w trójwymiarowej przestrzeni (wymiar nieparzysty)
operator Hodge’a przeprowadzający 2-formy w wektory i operator Hodge’a przeprowadzający wektory w
2-formy są wzajemnie odwrotne (odwracalne)
Udowodnimy (3.27). Na mocy (3.22) i (3.5) dla dowolnej funkcji gładkiej f :
rot ( grad f ) = * d G (grad f ) = * dd f = 0 ►
Zademonstrujemy jeszcze raz elegancje aparatu różniczkowania zewnętrznego , dowodząc za pomocą własności
(3.4) następujące dwie tożsamości :
rot (f
•
Y ) = f
•
rot Y + ( grad f
×
Y ) (3.28)
div ( X
×
Y ) = < rot X , Y >
−
< X , rot Y > (3.29)
◄ Udowodnimy (3.28). Wykorzystując definicje rotacji (3.22) tożsamości (3.6) i definicji iloczynu
wektorowego , znajdujemy :
rot (f
•
Y ) = *dG( f
•
Y ) = *d[f
•
G(Y)] = *[df
∧
G(Y) + f
•
dG(Y ) ] = *[ df
∧
G(Y) ] + f
•
*dG(Y ) =
= *[ G(grad f )
∧
G(Y) ] + f
•
* dG(Y) = ( grad f
×
Y ) + f
•
rot Y.
Udowodnimy teraz (3.29). W tym celu wykorzystamy następującą , łatwą w udowodnieniu tożsamość :
(*X)
∧
G(Y) = < X , Y >
•
Ω
(3.30)
w której * - jest operatorem Hodge’a formy objętości
Ω
, przeprowadzającym wektory w 2-formy.
Istotne jest tu to , że wymiar jest równy trzy , w przypadku dowolnego wymiaru n wzór (3.30) ma postać :
(*X)
∧
G(Y) = (
−
1)n-1
•
< X , Y >
•
Ω
Na podstawie (3.12) I definicji iloczynu wektorowego zapiszemy :
[div ( X
×
Y )]
•
Ω
= d*( X
×
Y ) = d** [ G(X)
∧
G(Y) ] = d [G(X)
∧
G(Y)]
I dalej, wykorzystując własności (3.4) , (3.30) i definicje (3.22) :
[div ( X
×
Y ) ]
•
Ω
= d [G(X)
∧
G(Y)] = dG(X)
∧
G(Y)
−
G(X)
∧
dG(Y) = (*rot X)
∧
G(Y)
−
(*rot Y)
∧
G(X) =
= < rot X , Y >
•
Ω
−
< rot Y , X >
•
Ω
= ( < rot X , Y >
−
< rot Y , X > )
•
Ω
►

50
3.3 Lemat Poincarego i jego zastosowania w analizie wektorowej
3.3.1 Zamknięte i dokładne formy różniczkowe. Lemat Poincarego
Definicja. Formę różniczkową P nazywamy „zamkniętą” jeżeli jej różniczka zewnętrzna jest równa zeru :
dP = 0
Forma różniczkowa P nazywa się „dokładną” jeżeli możemy znaleźć taką formę różniczkową Q, że :
dQ = P (3.31)
W takim przypadku formę różniczkową Q nazywamy „potencjałem” formy różniczkowej P. ■
Potencjał formy dokładnej nie jest określony jednoznacznie. Przykładowo - jeżeli forma Q jest potencjałem
formy P, a R – jest formą zamkniętą i deg R = deg Q , to Q + R – jest również potencjałem formy P, ponieważ :
d(Q + R) = dQ + dR = dQ + 0 = P
Przykład. Niech x, y, z – będą pewnymi funkcjami gładkimi. Potencjałami 3-formy dx
∧
dy
∧
dz są ( jak łatwo
sprawdzić ) przykładowe 2-formy :
x dx
∧
dy ,
−
y dx
∧
dy , z dx
∧
dy , 1/3 ( x dy
∧
dz
−
y dx
∧
dz + z dx
∧
dy ), (x + y + z )dy
∧
dz ,
( z2 + arctg(x) – y )dx
∧
dz , (z +xy) dx
∧
dy
itd. □
Na mocy własności (3.5) ( d
°
d = 0 ) dowolna forma dokładna jest zamknięta.
◄ P = dQ ⇒ dP = ddQ = 0 ►
Stwierdzenie odwrotne (tzn. dowolna forma zamknięta jest formą dokładną ) ogólnie mówiąc jest nieprawdziwe.
Ściśle mówiąc prawdziwość tego odwrotnego stwierdzenia istotnie zależy od tego jaki zbiór jest obszarem
określoności formy różniczkowej.
Definicja. Podzbiór S skończenie wymiarowej przestrzeni afinicznej nazywamy „gwieździstym” jeżeli możemy
znaleźć taki punkt p0
∈
S że :
∀
p
∈
S odcinek [ p0 , p ] łączący punkty p0 i p jest całkowicie zawarty w S.
Mówimy również , że S jest gwieździsty względem punktu p0 ■
Przykładowo , dowolny zbiór wypukły jest zbiorem gwieździstym względem dowolnego swojego punktu.
Poniższe twierdzenie często nazywamy lematem Poincarego
(Jules Henri Poincare (1854-1912) – francuski matematyk i astronom))
Twierdzenie 3.2 Na podzbiorze otwartym gwieździstym skończenie wymiarowej rzeczywistej przestrzeni
afinicznej dowolna zamknięta forma różniczkowa jest dokładna.
◄ Niech P – będzie n-wymiarową rzeczywistą przestrzenią afiniczną a x : P
→
Rn – niech będzie dowolnym
afinicznym układem współrzędnych na P. Zauważmy, że taki układ jest układem globalnym i wprowadzając go
na P faktycznie utożsamiamy P z Rn. Dlatego też dalej dla prostoty zapisu nie będziemy rozróżniali punktów z
P od ich współrzędnych i odwrotnie.
Niech U
⊂
P – będzie otwartym gwieździstym podzbiorem (względem pewnego punktu x0
∈
U ).
Bez ograniczenia ogólności możemy uważać , że x0 = ( 0 , ... , 0) ponieważ zawsze można to wykonać poprzez
odpowiednie przekształcenie współrzędnych np. przesunięcie o stały wektor.
Ponieważ U – jest zbiorem gwieździstym względem x0, to :
∀
x0
∈
U [x0 , x] = { (1- t)x0 + t x | 0
≤
t
≤
1 } = { t x | 0
≤
t
≤
1 }
⊂
U
Niech forma różniczkowa P
∈
Λ
k (U) :
P =
ΣΣΣΣ
Pi1 … ik dx
j1
∧
…
∧
dxjk
i1<…< ik
będzie zamkniętą tj. dP = 0 na U
We współrzędnych warunek dP = 0 zapisujemy następująco :
k + 1
(dP)j1 … jk+1 =
ΣΣΣΣ
(- 1)n-1
∂
Pj1 … jn-1jn+1 ... jk+1 /
∂
xjn = 0
n= 1
51
Przepiszmy indeksy do postaci ( m, i1,…, ik ) = ( j1,…, jk+1 ) i zapiszmy ten warunek w postaci :
k
∂
Pi1 … ik /
∂
xm =
ΣΣΣΣ
(- 1)n-1
∂
Pm i1 … in-1in+1 ...ik /
∂
xin (3.32)
n= 1
(wszystkie składowe oprócz pierwszej przepisaliśmy na prawą stronę)
Zdefiniujmy formę różniczkową Q
∈
Λ
k-1 (U) :
Q =
ΣΣΣΣ
Qi1 …ik-1 dx
i1
∧
…
∧
dxik-1 =
ΣΣΣΣ
Q I dx
i1
∧
…
∧
dxik-1 ( I = ( i1,…, ik-1 )
i1<…< ik-1 I
w następujący sposób :
dla dowolnego punktu x
∈
U i dowolnego zbioru indeksów I :
1
QI (x) =
∫
tk –1PmI (t • x) •
xm dt (3.33)
0
W przypadku jeśli x0≠ 0 (0, ... , 0) ,wyrażenie (3.33) należy zamienić na dokładniejsze :
1
QI (x) =
∫
tk –1PmI [ (1 – t) • x0 + t • x ] •
(xm – xm
0 ) dt (3.34)
0
( w tym przypadku całkowanie prowadzimy po odcinku [ x0 , x] )
Można sprawdzić prostymi rachunkami , że forma różniczkowa Q zadana wyrażeniem (3.33) spełnia zależność
(3.31). Pochodne cząstkowe od Q I łatwo obliczymy :
1
∂
QI(x)/
∂
xi =
∫
tk –1[
∂
PmI (t • x)/
∂
xi + PmI (t • x)
δ
m
i ] dt =
0
1 1
=
∫
tk [
∂
PmI (t • x)/
∂
xi ] xm dt +
∫
tk
−
1 P
iI (t • x) dt
0
0
I dalej , wykorzystując (3.8) i (3.32) znajdujemy :
k 1 k
(dQ)i1 …ik
−
1 (x) =
ΣΣΣΣ
(
−
1)n-1[
∂
Qi1 … in
−
1 in+1 ... ik (x) /
∂
xin ] =
∫
tk {
ΣΣΣΣ
(
−
1)n-1[
∂
Pi1 … in
−
1in+1 ... ik
n=1 0 n=1
1 k
(t • x)/xi ] xn dt } +
∫
tk-1 {
ΣΣΣΣ
(
−
1)n-1[ Pini1 … in
−
1 in+1 ... ik (t • x) ] dt } =
0 n = 1
1 1
=
∫
tk (
∂
Pi1...ik (t • x) /
∂
xn ) xn dt +
∫
k tk
−
1 P
i1...ik (x) dt =
∫
d/dt ( tk Pi1...ik (t • x) ) dt = Pi1...ik (x). ►
0 0 0
Ćwiczenie. Niech f – będzie funkcją przyjmującą wartości w R, zmiennej zespolonej z = x + iy. Jak to widać z
punktu 3.1.1 ,analityczność funkcji f jest równoważna zamkniętości formy różniczkowej f dz. Jeżeli obszar
określoności funkcji f jest zbiorem gwieździstym (względem punktu z0 ) to zamknięta forma różniczkowa f dz
ma potencjał h : dh = f dz . Udowodnić ( zobacz (3.34)) , że potencjał ten można obliczyć ze wzoru :
1
h(z) =
∫
f [ tz + ( 1 – t )z0 ] • ( z - z0 )dt + const.
0

52
Przykład. Rozpatrzmy przypadek zbioru otwartego na którym nie każda zamknięta forma różniczkowa jest
dokładna.
Niech W = E2\ {p0 } – będzie płaszczyzną Euklidesa E
2 z „wykrojonym” punktem p
0.
Niech x, y – będą współrzędnymi kartezjańskimi na E2 , początek których znajduje się w punkcie p0.
1-forma różniczkowa P
∈
Λ
1 (W) :
P = ( x dy – y dx ) / x2 + y2
jak łatwo sprawdzić jest zamknięta :
dP = [x2 + y2
−
2x2 + x2 + y2
−
2y2 / (x2 + y2 )2 ] dx
∧
dy = 0
Rozpatrzmy zbiór otwarty U
⊂
W :
U = E2\ L ; L = { p
∈
E2 | x(p)
≥
0 , y(p) = 0 }
Zauważmy, że U – to nic innego jak obszar określoności współrzędnych biegunowych (r,
ϕ
) związanych z
rozpatrywanymi współrzędnymi kartezjańskimi funkcjami przejścia :
x = r cos (
ϕ
) ; y = r sin (
ϕ
)
(w punktach osi L współrzędne biegunowe mają osobliwość )
Łatwo sprawdzić, że na zbiorze U spełniona jest równość P = d
ϕ
:
P =[ r cos(
ϕ
) d(r sin(
ϕ
)) – r sin(
ϕ
) d(r cos (
ϕ
)] / r2 = … = d
ϕ
Zatem, 1-forma P , rozpatrywana jako forma różniczkowa na U, jest dokładna.
Przyjmijmy ,że P jest dokładna na W , tj. istnieje funkcja gładka f : W
→
R , taka, że P = df na W.
Ponieważ d = df na U i U jest spójny, to
ϕ
= f + const na U.
Zatem, funkcja gładka
ϕ
: U
→
R może być przedłużona do funkcji gładkiej na W (do f + const ).
Jednak to jest sprzeczne z tym, że
ϕ
jest nieciągła (ma nieciągłość pierwszego rodzaju ) w punktach zbioru L.
W takim razie P jest zamknięta na W ale nie jest dokładna na W. □
Uwaga. Lemat Poincarego często jest formułowany w następujący sposób :
dowolna zamknięta forma różniczkowa jest lokalnie dokładna.
To oznacza, że jeśli P – jest zamkniętą k-formą, to dla dowolnego punktu należącego do zbioru na którym
została określona forma P, możemy znaleźć takie jego otoczenie U ( które zawsze możemy wybrać jako zbiór
wypukły) i taka formę Q
∈
Λ
k
−
1 (U) , że dQ = P na U.
Uwaga. Warunek gwieździstości zbioru jest warunkiem dostatecznym jednak nie jest warunkiem
wystarczającym aby, zadana na tym zbiorze zamknięta forma różniczkowa miała na tym zbiorze potencjał.
Przykładowo : 1-forma różniczkowa :
ω =
−
( x1 dx1 + … + xn dxn ) / r3 , gdzie r = sqrt [ (x1)2 + ... + (xn )2 ]
określona na zbiorze otwartym U = Rn \ { (0, ... , 0)}posiada na tym zbiorze potencjał 1\r
Zbiór U, przy tym nie jest gwieździsty względem żadnego ze swoich punktów.
Prostym wnioskiem lematu Poincarego jest punkt 2. poniższego twierdzenia, dotyczącego najogólniejszego
rozwiązania równania różniczkowego (3.31). Rozpatrujemy to równanie na pewnym ustalonym podzbiorze
otwartym U, skończenie wymiarowej przestrzeni afinicznej, tj. formy różniczkowe P i Q zadane są na
zbiorze U. Niewiadomymi w tym równaniu jest forma różniczkowa Q, forma P – jest zadana. Dla prostoty
zakładamy, że wszystkie rozpatrywane formy różniczkowe są formami gładkimi klasy C∞, rozwiązania
poszukujemy w tej samej klasie gładkości
Twierdzenie 3.3 Niech na zbiorze otwartym U będzie zadana zamknięta forma różniczkowa P.
1. Jeżeli forma P jest dokładna , to ogólne rozwiązanie równania różniczkowego (3.31) ma postać :
Q = Q0 + R
gdzie : Q0 – jest pewnym rozwiązaniem szczególnym , R – jest dowolną zamkniętą formą różniczkową .
2. Jeżeli zbiór U jest gwieździsty , to ogólne rozwiązanie równania różniczkowego (3.31) ma postać :
Q = Q0 + dF
gdzie : Q0 – jest pewnym rozwiązaniem szczególnym, F – jest dowolną formą różniczkową.
Oczywiście , mamy : deg R = deg Q = deg P – 1 ; deg F = deg P – 2

53
◄ 1. Jeżeli Q0 – jest rozwiązaniem (3.31) , a R – formą zamkniętą , to Q = Q0 + R – jest również rozwiązaniem
(3.31) , co można udowodnić bez trudu (już to sprawdziliśmy na początku paragrafu 3.3 ). Odwrotnie , jeżeli Q
jest dowolnym rozwiązaniem (3.31) to forma R = Q - Q0 jest zamknięta , ponieważ : dR = dQ
−
dQ0 = P – P = 0
2. Bezpośrednio wynika z punktu 1. i lematu Poincarego . ►
3.3.2 Pewne zastosowania lematu Poincarego : potencjał skalarny i wektorowy
W standardowym wykładzie analizy wektorowej dowodzi się następujących twierdzeń.
W trójwymiarowej przestrzeni euklidesowej E3 , polem wektorowym o zerowej dywergencji jest pole rotacji, a
polem wektorowym o zerowej rotacji jest pole gradientu :
div Y = 0 ⇒ Y = rot X (3.35)
rot Y = 0 ⇒ Y = grad f (3.36)
proszę porównać to z (3.26) i (3.27).
Teraz pokażę, że (3.35) i (3.36) – są prostymi wnioskami z lematu Poincarego.
◄ Udowodnię w pierwszej kolejności (3.35). Jeżeli div Y = 0 , to na mocy definicji (3.12) d*Y = 0, tj. forma
różniczkowa *Y
∈
Λ
2 (E
3 ) jest zamknięta. Zgodnie z lematem Poincarego , możemy znaleźć 1-formę
różniczkową : X
∈
Λ
1 (E
3 ) taką, że dX = *Y. Jednak wtedy *dX = Y , lub – co na jedno wychodzi , rot X =Y,
gdzie X – jest polem wektorowym, stowarzyszonym z X (zobacz definicja (3.22) ).
Nasze wywody można zapisać , krótko tak :
div Y = 0
d*Y = 0
*Y = dX
Y = *dX
Y = rot X. (3.37)
Udowodnię teraz (3.36). Warunek rot Y = 0, na mocy definicji (3.22) jest równoważny warunkowi dY = 0, gdzie
Y – jest 1-formą różniczkową stowarzyszoną z Y. Zgodnie z lematem Poincarego , możemy znaleźć funkcje
gładką ( 0-formę ) f : E3
→
R , taką , że df = Y, lub co na jedno wychodzi : grad f = Y (ponieważ gradient jest to
pole wektorowe stowarzyszone z różniczką ) Można to zapisać krótko w postaci :
rot Y = 0
dY = 0
Y = df
Y = grad f. ► (3.38)
Oczywiście, stwierdzenia (3.35) i (3.36) pozostaną również słuszne, jeżeli w miejsce E3 weźmiemy dowolny
otwarty i gwieździsty podzbiór E3.
Definicja. Pole wektorowe Y, zadane na otwartym podzbiorze U (pseudo)euklidesowej przestrzeni, nazywamy
„potencjalnym”, jeżeli istnieje funkcja gładka f : U
→
R , taka ,że na U spełniona jest równość :
grad f = Y (3.39)
Dowolna funkcja f, spełniająca wskazany warunek nazywa się „potencjałem“ (skalarnym) pola wektorowego Y.
■
Jest zrozumiałe, że potencjał potencjalnego pola wektorowego jest określony w sposób nie jedno znaczny :
jeżeli f – jest potencjałem Y, to f + const. – jest również potencjałem pola Y.
W trójwymiarowej przestrzeni Euklidesa na to aby pole wektorowe Y ,było potencjalnym koniecznym jest
spełnienie warunku :
rot Y = 0 (3.40)
(zobacz (3.27) ). W przypadku kiedy obszar określoności pola wektorowego Y – jest zbiorem gwieździstym ,
warunek (3.40) jest również warunkiem dostatecznym , na potencjalność pola Y . (zobacz 3.36) )
Przykład. Pole wektorowe F w przestrzeni Euklidesa nazywamy „centralnym” względem punktu o, jeżeli jest
ono określone w pewnym otoczeniu punktu o i :
F |(o + r ) = Φ(r) • r , gdzie r = | r | = sqrt ( < r , r > )
Funkcja Φ przyjmuje wartości w R ,przez o + r - oznaczyliśmy koniec wektora r , przyłożonego w punkcie o ,
przez < . , . > - oznaczyliśmy iloczyn skalarny.
Centralne pole wektorowe jest polem potencjalnym w otoczeniu punktu o (przy warunku , że funkcja Φ jest
ciągła ), jego potencjał jest dany wzorem :
r
u( o + r ) =
∫
a • Φ(a) da , gdzie r0 = const. > 0
r0

54
W istocie we współrzędnych kartezjańskich (x1,…, x
n ) o środku w punkcie o :
r = sqrt [ (x1)2 + ... + (xn)2 ] ; F = Fi
∂
/
∂
xi , gdzie : Fi (x) = Φ(r) xi
Elementarnym rachunkiem można pokazać , że :
∂
u/
∂
xi = (
∂
u /
∂
r) (
∂
r /
∂
xi ) = r Φ(r) (
∂
r /
∂
xi ) = r Φ(r) xi / r = Fi □
Definicja. Pole wektorowe X w trójwymiarowej przestrzeni Euklidesa nazywamy „potencjałem wektorowym” ,
pola wektorowego Y, jeżeli :
rot X = Y (3.41)
(równość jest spełniona w każdym punkcie otwartego zbioru będącego obszarem określoności obu pól
wektorowych ) ■
Jest jasne, że potencjał wektorowy, jeśli istnieje, jest określony niejednoznacznie :
jeśli X – jest potencjałem wektorowym pola Y, to ( X + grad f ) – jest również potencjałem wektorowym Y,
ponieważ rot grad f = 0 (zobacz (3.27 )
Aby pole wektorowe Y, posiadało potencjał wektorowy konieczne jest spełnienie warunku :
div Y = 0 (3.42)
(zobacz (3.26 ). W przypadku, kiedy obszarem określoności pola wektorowego Y – jest zbiór gwieździsty ,
warunek (3.42) jest również warunkiem wystarczającym, aby pole wektorowe Y posiadało potencjał wektorowy
(zobacz (3.35) )
Definicja. Pole wektorowe o zerowej dywergencji nazywamy „solenoidalnym” ■
Jednym z możliwych sposobów obliczenia potencjału skalarnego lub wektorowego, pola wektorowego na
zbiorze gwieżdzistym jest wykorzystanie wzoru (3.34), zobacz dowód lematu Poincarego.
Niech przykładowo, mamy obliczyć potencjał wektorowy X pola wektorowego Y.
Zależności (3.37) podpowiadają następujący algorytm postępowania :
1). obliczamy *Y
2). obliczamy potencjał X 2-formy *Y zgodnie ze wzorem (3.34) :
1
Xi(x) =
∫
t • (*Y )mi [ ( 1 – t ) • x0 + t • x ] • (x
m – xm
0 ) dt ; i = 1,2 ,3 (3.43)
0
3). znajdujemy stowarzyszone do 1-formy X pole wektorowe X
Analogicznie – zależności (3.38) pokazują następujący algorytm obliczenia potencjału skalarnego f , pola
wektorowego Y :
1). znajdujemy 1-formę Y, stowarzyszoną z polem wektorowym Y
2). obliczamy potencjał f 1-formy Y (lub, co na jedno wychodzi – potencjał skalarny pola wektorowego Y )
zgodnie ze wzorem (3.34) :
1
f(x) =
∫
Ym( ( 1 – t ) • x0 + t • x ) • (x
m – xm
0 ) dt (3.44)
0
Sformułujemy teraz twierdzenie dotyczące rozwiązań równań różniczkowych (3.39) i (3.41). Każde z tych
równań rozpatrujemy jako określone na otwartym zbiorze U, tj. pola wektorowe Y, X i gładka funkcja f,
przyjmująca wartości w R są zadane na U. Niewiadomą w równaniu (3.39) jest funkcja f , a w równaniu (3.41) –
pole wektorowe X, natomiast pole wektorowe Y – jest dane. Dla uproszczenia , zakładamy ,że wszystkie
rozpatrywane pola i funkcje są klasy C∞, rozwiązań poszukujemy w tej samej klasie gładkości.
Twierdzenie 3.4 Niech na zbiorze otwartym U będzie zadane pole wektorowe Y i funkcja rzeczywista f.
1). Jeżeli zbiór U jest spójny a pole wektorowe Y jest potencjalne, to ogólne rozwiązanie równania
różniczkowego (3.39) ma postać :
f = f0 + const.
gdzie : f0 – jest pewnym rozwiązaniem szczególnym (3.39)
2). Jeżeli zbiór U jest gwieździsty, a pole wektorowe Y solenoidalne, to ogólne rozwiązanie równania
różniczkowego (3.41) ma postać ;
X = X0 + grad f
gdzie: X0 – jest rozwiązaniem szczególnym , a f – jest dowolną funkcja gładką .

55
◄ Dowód 1). pozostawiam czytelnikowi w charakterze nie złożonego ćwiczenia.
Dowód 2). Jeżeli X0 – jest rozwiązaniem (3.41) , to X = X0 + grad f - jest również rozwiązaniem ,
ponieważ rot grad f = 0 (zobacz ( 3.27) ). Odwrotnie, jeśli X – jest dowolnym rozwiązaniem (3.41) ,to :
rot ( X
−
X0 ) = 0 *d ( X
−
X0 ) = 0 d ( X
−
X0 ) = 0
gdzie : X - X0 – są 1-formami różniczkowymi , stowarzyszonymi z polami wektorowymi, odpowiednio X i X0
Na mocy lematu Poincarego istnieje funkcja gładka f (zero-forma) taka, że:
X
−
X0 = df X = X0 + df X = X0 + grad f ►
3.4 Antyprzeciągnięcie form różniczkowych poprzez odwzorowanie gładkie
Niech , P1 i P2 – będą przestrzeniami afinicznymi , stowarzyszonymi z skończenie wymiarowymi
przestrzeniami rzeczywistymi odpowiednio : V1 i V2 , U1
⊂
P1 , U2
⊂
P2 ,- będą zbiorami otwartymi ,
ϕ
: U1
→
P2 – będzie odwzorowaniem gładkim i
ϕ
(U1)
⊂
U2 .
Niech A
∈
Λ
k (U2 ) – będzie k-formą różniczkową na U2.
Wtedy na U1 możemy określić k-formę różniczkową
ϕ
*A w sposób następujący:
dla dowolnego punktu p
∈
U1 i dowolnego zbioru wektorów : X1 , ... ,Xk przestrzeni V1 :
(
ϕ
*A)p (X1 , ... ,Xk ) = A
ϕ
(p) [ (d
ϕ
)p X1, ... , (d
ϕ
)p Xk ) ] (3.45)
Definicja. Formę
ϕ
*A nazywamy “odwrotnym obrazem” formy A , przy odwzorowaniu
ϕ
, lub wynikiem
„antyprzeciągnięcia” formy A przez odwzorowanie
ϕ
.
Odwzorowanie
ϕ
* :
Λ
k (U2 )
→
Λ
k (U1 ) , A |
→
ϕ
*A
nazywamy „operatorem antyprzeciągnięcia”, k-form różniczkowych przez odwzorowanie
ϕ
.
Uwaga. Wygodnie jest zdefiniować operacje antyprzeciągnięcia 0-form różniczkowych tj. funkcji gładkich
f :U2
→
R , w następujący sposób ;
ϕ
*f = f
°ϕ
(3.46)
Twierdzenie 3.5 (własności operatora antyprzeciągnięcia)
1. Operator
ϕ
* jest liniowy i zachowuje iloczyn zewnętrzny tj. dla dowolnych dwóch form różniczkowych A i B
ϕ
*(A
∧
B ) = (
ϕ
*A )
∧
(
ϕ
*B) (3.47)
2. Operator antyprzeciągnięcia
ϕ
* jest zamienny z operatorem d – różniczkowania zewnętrznego :
ϕ
*
°
d = d
°ϕ
* (3.48)
3. Jeśli
ϕ
i
ψ
- są odwzorowaniami gładkimi i zdefiniowane jest złożenie
ψ
°
ϕ
, to :
(
ψ
°
ϕ
)* =
ϕ
*
°
ψ
* (3.49)
4. Jeśli (x1, ... ,xn ) – są współrzędnymi na P1 a (y
1, ... ,ym ) – są współrzędnymi na P
2 ,
ϕ
j = yj
°ϕ
, j = 1 ... m
A =
ΣΣΣΣ
Aj1 …jk dy
j1
∧
...
∧
dyjk
j1 < ... <jk
ϕ
*A =
ΣΣΣΣ
(
ϕ
*A)i1 …ik dx
i1
∧
...
∧
dxik
j1 < ... <jk
to :
(
ϕ
*A)i1 …ik = (
∂ϕ
j1/
∂
xi1 ) …. (
∂ϕ
jk /
∂
xik )(Aj1 …jk
°ϕ
) (3.50)
oraz :
ϕ
* (
ΣΣΣΣ
Aj1 …jk dy
j1
∧
...
∧
dyjk ) =
ΣΣΣΣ
(Aj1 …jk
°ϕ
) (
ϕ
*dyj1)
∧
...
∧
(
ϕ
*dyjk ) (3.51)
j1 < ... <jk j1 < ... <jk
gdzie :
ϕ
*dyj = d (yj
°ϕ
) = (
∂ϕ
j/
∂
xi ) dxi (3.52)
◄ 1. Liniowość operatora
ϕ
* jest oczywista i wynika z jego definicji (3.45). Udowodnimy zatem własność
(3.47). W pierwszej kolejności zauważmy ,że operator
ϕ
* zachowuje iloczyn tensorowy. Można to sprawdzić
poprzez porównanie następujących własności :
ϕ
*(A
⊗
B) |p (v, ... w, ... ) = (A
⊗
B) |
ϕ
(p) (d
ϕ
|
ϕ
(p) v, ... d
ϕ
|
ϕ
(p) w, ... ) = A
ϕ
(p) ((d
ϕ
|
ϕ
(p) v, ... )

56
B
ϕ
(p) ((d
ϕ
|
ϕ
(p) w, ... ) = (
ϕ
*A)p (v, ... )(
ϕ
*B)p (w, ... ) = [ (
ϕ
*A)p
⊗
(
ϕ
*B)p ] (v, ... w, ... ) =
= [ (
ϕ
*A)
⊗
(
ϕ
*B) ] |p (v, ... w, ... )
I dalej, możemy sprawdzić (porównując definicje), że
ϕ
* jest przemienny (komutuje) z operatorem
numerującym argumenty tj. jeśli A – jest k-formą a
σ
- k-permutacją , to
ϕ
*
σ
A =
σ
ϕ
*A. Stąd oraz z liniowości
ϕ
* wynika ,że
ϕ
* jest przemienny z operatorem alternowania :
ϕ
* Alt A = Alt
ϕ
*A
A z tego , że
ϕ
* zachowuje iloczyn tensorowy , jest liniowy i przemienny z operatorem alternacji , wynika ,że
ϕ
*
zachowuje iloczyn zewnętrzny.
2. Własność (3.48) łatwo jest udowodnić poprzez indukcje. Udowodnimy ją na początku dla zero-form
różniczkowych : niech f : U2
→
R – będzie funkcją gładką sprawdzimy, że :
ϕ
*df = d
ϕ
*f
Dla dowolnego punktu p
∈
U1 i dowolnego wektora X
∈
V1 mamy (zobacz (3.45) i (3.46) ):
(
ϕ
*df)p X = (df)
ϕ
(p) ( (d
ϕ
)p X ) = (d (f
°ϕ
) ))p X = (d
ϕ
* f )p X .
Teraz rozpatrzymy przypadek 1-formy różniczkowej. Na mocy liniowości
ϕ
* wystarczy sprawdzić (3.48) dla
1-formy postaci : ω = u dv, gdzie : u, v – są 0-formami,
ϕ
*dω =
ϕ
*d(u dv) =
ϕ
*(du
∧
dv) = (
ϕ
* du)
∧
(
ϕ
* dv) = (d
ϕ
* u)
∧
(d
ϕ
* v)
d
ϕ
*ω = d
ϕ
* (u dv) = d(
ϕ
* u
•
ϕ
* dv )= d(
ϕ
* u
•
d
ϕ
* v )=(d
ϕ
* u)
∧
(d
ϕ
* v)
Rozpatrzymy teraz dowolną k-formę różniczkową A , k > 1 .Formę A można przedstawić (lokalnie) w postaci :
A = B
∧
C, gdzie : deg B = m < k ; deg C < k. Równość (3.48) jest słuszna dla formy stopnia mniejszego od k.
Dlatego :
ϕ
*dA -
ϕ
*d (B
∧
C ) -
ϕ
*[dB
∧
C + (-1)m B
∧
dC ] – (
ϕ
* dB)
∧
(
ϕ
* C) + (-1)m (
ϕ
* dB)
∧
(
ϕ
* C) =
= (d
ϕ
* B )
∧
(
ϕ
*C) + (-1)m (
ϕ
* dB)
∧
(d
ϕ
* C) = d [ (
ϕ
*B)
∧
(
ϕ
* C)] = d
ϕ
* (B
∧
C) = d
ϕ
*A.
3. Własność (3.49) łatwo wywieść z definicji operatora antyprzeciągnięcia (zobacz (3.45) i (3.46) )
Udowodnimy (3.49) dla 0-formy :
(
ψ
°ϕ
)*f = f
°
(
ψ
°ϕ
) = (f
°ψ
)
°ϕ
= (
ψ
*f)
°ϕ
=
ϕ
*(
ψ
*f) = (
ϕ
*
°ψ
*)f
dla dowolnej funkcji gładkiej f : U2
→
R . Czego należało dowieść.
Udowodnimy teraz (3.49) dla form różniczkowych stopnia dodatniego. Niech A
∈
Λ
k (U2 ) a wektory :
(X1 , ... ,Xk )
∈
V1 , będą dowolne. Mamy :
(
ϕ
*
ψ
*A)p (X1 , ... ,Xk ) = (
ψ
*A)
ϕ
(p) [(d
ϕ
)p X1 , ... ,(d
ϕ
)p Xk ] = A
ψ
(
ϕ
(p)) [ (d
ψ
)
ϕ
(p)(d
ϕ
)pX1 , ... ,
(d
ψ
)
ϕ
(p)(d
ϕ
)pXk ] = A[
ψ°ϕ
](p) [ (d[
ψ°ϕ
])p X1, … , (d[
ψ°ϕ
])p Xk ] = ((
ψ°ϕ
)*A)p (X1 , ... ,Xk )
tj.
ϕ
*
ψ
*A = (
ψ
°
ϕ
)*A czego należało dowieść.
4. Ustalmy pewien punkt p
∈
U2. Wiemy, że macierz operatora liniowego (d
ϕ
)p w bazie { (
∂
/
∂
xi )p }
n
i=1 i
{ (
∂
/
∂
yj )
ϕ
(p) }
m
j=1 - jest to macierz Jakobiego (
∂ϕ
/
∂
x )p tj.
(d
ϕ
)p (
∂
/
∂
xi |p ) = (
∂ϕ
j/
∂
xi |p )
∂
/
∂
yj |
ϕ
(p)
Wykorzystując (3.45) i ostatnią zależność , znajdujemy :
(
ϕ
*A)i1 ... ik (p) = (
ϕ
*A)p [ (
∂
/
∂
xi1 |p ) … (
∂
/
∂
xik |p ) ] = A
ϕ
(p) [ (
∂ϕ
j1/
∂
xi1)p
∂
/
∂
yj1 |
ϕ
(p) …
... (
∂ϕ
jk/
∂
xik )p
∂
/
∂
yjk |
ϕ
(p)] = (
∂ϕ
j1/
∂
xi1)p …. (
∂ϕ
jk/
∂
xik )p A
ϕ
(p) [ (
∂
/
∂
yj1 |
ϕ
(p) … (
∂
/
∂
yjk |
ϕ
(p) ) =
= (
∂ϕ
j1/
∂
xi1)p …. (
∂ϕ
jk/
∂
xik )p Aj1 … jk (
ϕ
(p) ]
co dowodzi (3.50).
I dalej, słuszność (3.51) , (3.52) od razu wynika z liniowości
ϕ
* i własności (3.47) , (3.48). ►

57
Przykłady.
1. Niech c : R
→
P – będzie krzywą gładką w n-wymiarowej rzeczywistej , afinicznej przestrzeni P, A – niech
będzie 1-formą różniczkową w P. Znajdziemy c*A.
Oznaczmy przez t standardową współrzędną na prostej R. Dla dowolnych t,
ξ
∈
R, zgodnie z definicją (3.45) jest
(c*A) t (
ξ
)= Ac(t) ( (dc)t
ξ
) = Ac(t) [ (dc(t) / dt )
ξ
] =
ξ
Ac(t) ( dc(t) / dt )
(c*A) t = (c*A) t (1) dt = Ac(t) ( c
•
(t) ) dt , gdzie c
•
(t) = dc(t)/dt ; gdzie : c
•
(t) = dc
•
(t)/dt
Jeśli (x1... xn ) – są współrzędnymi regularnymi na P i A = Ai dx
i , to :
Ac(t) ( c
•
(t) ) dt = Ai ( (c
•
(t) ) xi
•
(t) ) , gdzie : xi
•
(t) = dxi( c(t) ) / dt ; gdzie : xi
•
(t) = dxi
•
(t)/dt
Zatem :
c*A = Ac (c
•
)dt = ( Ai
°
c) xi
•
dt
Przy czym , ten sam rezultat można uzyskać wykorzystując wzór (3.50).
2. Rozpatrzmy odwzorowanie gładkie :
r : W
→
E3 , (u, v ) |
→
r (u, v)
zbioru otwartego W
⊂
R2 w zorientowaną trójwymiarową przestrzeń Euklidesa E3 . Funkcja wektorowa r
zadaje parametrycznie pewien dwu wymiarowy obszar (powierzchnię ) S
⊂
E2, w przypadku , jeżeli wektory :
∂
r /
∂
u i
∂
r /
∂
v są liniowo niezależne w każdym punkcie (u, v)
∈
W.
Rozpatrzmy w E3 2-formę różniczkową :
A = R dx
∧
dy – Q dx
∧
dz + P dy
∧
dz.
(x, y, z ) - są zorientowanymi współrzędnymi kartezjańskimi , określonymi w pewnym obszarze zbioru r(W).
Obliczmy czemu równa się r*A.
Współrzędne wektora r(u, v) w bazie {
∂
/
∂
x,
∂
/
∂
y,
∂
/
∂
z }dla uproszczenia będziemy oznaczali przez :
( x(u, v) , y(u, v) , z(u, v) ). Ponieważ macierz Jakobiego :
(
∂
x/
∂
u ,
∂
x/
∂
v )
(
∂
y/
∂
u ,
∂
y/
∂
v )
(
∂
z/
∂
u ,
∂
z/
∂
v ) (u, v)
jest macierzą różniczki (dr)(u, v) w bazach :
{
∂
/
∂
u = (1, 0)T ,
∂
/
∂
u = (0, 1)T } i {
∂
/
∂
x,
∂
/
∂
y,
∂
/
∂
z } oraz :
(
∂
x/
∂
u ,
∂
x/
∂
v ) ( 1 ) = (
∂
x/
∂
u )
(
∂
y/
∂
u ,
∂
y/
∂
v ) ( 0 ) (
∂
y/
∂
u )
(
∂
z/
∂
u ,
∂
z/
∂
v ) (
∂
z/
∂
u )
(
∂
x/
∂
u ,
∂
x/
∂
v ) ( 0 ) = (
∂
x/
∂
v )
(
∂
y/
∂
u ,
∂
y/
∂
v ) ( 1 ) (
∂
y/
∂
v )
(
∂
z/
∂
u ,
∂
z/
∂
v ) (
∂
z/
∂
v )
to :
dr (
∂
/
∂
u) =
∂
r
∂
u i dr (
∂
/
∂
v) =
∂
r
∂
v
Dla 2-formy r*A słuszna jest równość :
r*A = b du
∧
dv
gdzie :
b(u, v) = (r*A )(u, v) (
∂
/
∂
u
∂
/
∂
v ) = Ar(u, v) [ (dr )(u, v) (
∂
/
∂
u) , (dr )(u, v) (
∂
/
∂
v) ] =
= Ar(u, v) [ (
∂
r (u, v) /
∂
u ), (
∂
r (u, v) /
∂
v ) ].
Aby obliczyć A(
∂
r /
∂
u ,
∂
r /
∂
v ) wprowadzimy i rozpatrzymy pole wektorowe :
A = P
∂
/
∂
x + Q
∂
/
∂
y + R
∂
/
∂
z = *A
gdzie * - jest operatorem Hodge’a metrycznej formy objętości : dx
∧
dy
∧
dz, przeprowadzającym 2-formy w
wektory.

58
Mamy zatem :
A(
∂
r/
∂
u ,
∂
r/
∂
v ) = P dy
∧
dz (
∂
r/
∂
u ,
∂
r/
∂
v ) - Q dx
∧
dz (
∂
r/
∂
u ,
∂
r/
∂
v ) + R dx
∧
dy (
∂
r/
∂
u ,
∂
r/
∂
v ) =
= P |
∂
y/
∂
u ,
∂
y/
∂
v | + Q (-1) |
∂
x/
∂
u ,
∂
x/
∂
v | + R |
∂
x/
∂
u ,
∂
x/
∂
v | = | P ,
∂
x/
∂
u ,
∂
x/
∂
v | = < A ,
∂
r/
∂
u
×
∂
r/
∂
v >
|
∂
z/
∂
u ,
∂
z/
∂
v | |
∂
z/
∂
u ,
∂
z/
∂
v | |
∂
y/
∂
u ,
∂
y/
∂
v | | Q ,
∂
y/
∂
u ,
∂
y/
∂
v |
| R ,
∂
z/
∂
u ,
∂
z/
∂
v |
Przez < . , . > oznaczono iloczyn skalarny.
Zatem :
r*A = < *A,
∂
r/
∂
u
×
∂
r/
∂
v > du
∧
dv (3.54)
W przypadku , jeżeli wektory
∂
r/
∂
u i
∂
r/
∂
v są liniowo niezależne w dowolnym punkcie (u, v )
∈
W. tj. funkcja
wektorowa r zadaje w sposób parametryczny pewną powierzchnię S
⊂
E2 ,możemy wprowadzić wektor
normalny jednostkowy do powierzchni :
n = (
∂
r/
∂
u
×
∂
r/
∂
v ) / |
∂
r/
∂
u
×
∂
r/
∂
v | = (
∂
r/
∂
u
×
∂
r/
∂
v ) / sqrt (EG – F2 )
gdzie :
( Wykorzystujemy tutaj następujące zależności : | a
×
b |2 = | a |2 | b |2 sin 2 (
θ
) = | a |2 | b |2 - | a |2 | b |2
cos 2 (
θ
) = < a , a > < b , b > - < a , b >2 , gdzie :
θ
- jest kątem między wektorami a , b . )
E = <
∂
r/
∂
u ,
∂
r/
∂
u > = (
∂
x/
∂
u)2 + (
∂
y/
∂
u)2 + (
∂
z/
∂
u)2
F = <
∂
r/
∂
u ,
∂
r/
∂
v > = (
∂
x/
∂
u)(
∂
x/
∂
v) + (
∂
y/
∂
u)(
∂
y/
∂
v) + (
∂
z/
∂
u)(
∂
z/
∂
v)
G = <
∂
r/
∂
v ,
∂
r/
∂
v > = (
∂
x/
∂
v)2 + (
∂
y/
∂
v)2 + (
∂
y/
∂
u)2
Wtedy (3.54) możemy przepisać w postaci :
r*A = < *A, n > (EG – F2 )du
∧
dv (3.55)
3. Niech P1 i P2 – będą przestrzeniami afinicznym o tym samym wymiarze n ; U1
⊂
P1 ,U2
⊂
P2 – będą
zbiorami otwartymi ;
ϕ
: U1
→
P2 – odwzorowaniem gładkim ,
ϕ
(U1)
⊂
U2 ,
Ω
∈
Λ
n ( U2 ).
Obliczmy
ϕ
*
Ω
we współrzędnych . Niech (x1, ... , xn ) – będą współrzędnymi na U1 , (y
1, ... , yn ) – będą
współrzędnymi na U2 .
Ω
= a
•
dy1
∧
...
∧
dyn ,
ϕ
*
Ω
= b
•
dx1
∧
...
∧
dxn ,
ϕ
j = yj
°
ϕ
, j = 1... n.
Wyrazimy b przez a i
ϕ
. Na mocy (3.50) :
b = (
ϕ
*
Ω
)1...n = (
∂ϕ
i1 /
∂
x1) ... (
∂ϕ
in /
∂
xn)
•
(
Ω
i1 ... in
°
ϕ
) = 0
Ponieważ
Ω
- jest formą zewnętrzną , to składowe z powyższej sumy w których pośród indeksów i1 ... in , są
indeksy które się powtarzają , są równe zeru. Dlatego dana suma jest równa :
ΣΣΣΣ
[(
∂ϕσ
(1)/
∂
x1) ... (
∂ϕσ
(n)/
∂
xn)]
•
(
Ωσ
(1) ...
σ
(n)
°
ϕ
) =
ΣΣΣΣ
[ (
∂ϕσ
(1)/
∂
x1) ... (
∂ϕσ
(n)/
∂
xn)]
•
sign
σ
•
σ⊂
Sn
σ⊂
Sn
•
(
Ω
1... n
°
ϕ
) = det (
∂ϕ
/
∂
x)
•
(a
°
ϕ
) = (det d
ϕ
)
•
(a
°
ϕ
)
Zatem :
ϕ
* ( a
•
dy1
∧
...
∧
dyn ) = (det d
ϕ
)
•
(a
°
ϕ
) dy1
∧
...
∧
dyn (3.56)
( gdzie poprzez :
•
- oznaczm iloczyn a poprzez
°
- złożenie –przypis własny )
4. Wzory (3.51) , (3.52) umożliwiają obliczenie odwrotnego obrazu we współrzędnych : wyraźmy współrzędne
punktu-obrazu poprzez współrzędne punktu-przeciwobrazu, następnie wstawmy te wyrażenia do rozkładu
formy różniczkowej względem form bazowych w przestrzeni –obrazie i dokonajmy pewnych manipulacji
różniczkami. Wyjaśnijmy sens tego co powiedziano na przykładzie.
Znajdźmy odwrotny obraz 2-formy różniczkowej :
A = 2x dx
∧
dy + dx
∧
dz (3.57)
przy odwzorowaniu :
F : R2
→
R3 , F (u, v ) = ( u cos (v), u sin (v), 2u - 1 ).
W celu rozwiązania tego zadania, podstawiamy do (3.57) u cos (v) w miejsce x, u sin (v) w miejsce y, 2u – 1
w miejsce z po tym otrzymujemy :
F*A = 2u cos(v) d(u cos(v) )
∧
d(u sin(v) ) + d( u cos(v) )
∧
d(2u – 1) = 2u cos(v) ( cos(v) du – u sin(v) dv )
∧
∧
(sin(v) )du + u cos(v) dv ) + 2( cos(v) du – u sin(v) dv )
∧
du = 2u (u cos(v) + sin(v) ) du
∧
dv □

59
3.5 Zastosowanie 3. Równania elektrodynamiki w języku form różniczkowych.
3.5.1 Klasyczna forma równań pola elektromagnetycznego
U podstaw klasycznej teorii elektromagnetyzmu leży następujący układ równań Maxwella :
div B = 0 (brak ładunków magnetycznych) (3.58)
rot E + (
∂
B /
∂
t ) = 0 (prawo indukcji Faradaya ) (3.59)
div E = 4
πρ
( prawo Gaussa ) (3.60)
rot B – (
∂
E /
∂
t ) = 4
π
J (prawo Ampera ) (3.61)
E – jest wektorem natężenia pola elektrycznego
B – jest wektorem natężenia pola magnetycznego,
ρ
- jest gęstość objętościowa ładunku elektrycznego.
J – jest wektorem gęstości prądu elektrycznego.
Równania (3.58) – (3.61) zapisane są w układzie jednostek , w których c =
ε
0 =
µ
0 ; c - jest prędkością światła w
próżni,
ε
0 –stała dielektryczna,
µ
0 – stała przenikalności magnetycznej
Wielkości : E, B, J reprezentują sobą zależne od czasu t, pola wektorowe w zorientowanej trójwymiarowej
przestrzeni Euklidesa E3 ,
ρ
jest funkcją R-wartościową na R
×
E3 :
E = E (t, a), B = B (t, a), J = J (t, a),
ρ
=
ρ
(t, a), t
∈
R ,a
∈
E3 .
Operatory różniczkowe div i rot obliczamy względem „zmiennych przestrzennych” tj. działają na
E = E (t, a), B = B (t, a) przy ustalonej wartości zmiennej t.
3.5.2 Przestrzeń Minkowskiego i tensor pola elektromagnetycznego.
Przypomnijmy ,że przestrzenią Minkowskiego nazywamy dowolną czterowymiarową pseudoeuklidesową
przestrzeń na której tensor metryczny ma sygnaturę (1.3) ( lub ( 3.1) ). Dla naszych celów wystarczy następujący
model przestrzeni Minkowskiego ( M,
η
) :
M
→
R
×
E3 ,
η
( (t, X) , (
τ
, Y ) )
→
t
τ
−
< X, Y >
gdzie : < . , . > = g - jest tensorem metrycznym przestrzeni Euklidesa E3 .
Jeżeli (x, y, z ) – są zorientowanymi współrzędnymi kartezjańskimi w E3 , a t – jest standardową współrzędną
na prostej R , to funkcje :
( x0, x1, x2, x3 ) = (t, x, y, z )
obrazują pseudoortonormalny układ współrzędnych w przestrzeni Minkowskiego M. W tych współrzędnych ,
jak łatwo sprawdzić przez proste rachunki mamy :
η
=
ηµν
dx
µ
⊗
dx
ν
= dt
⊗
dt – dx
⊗
dx – dy
⊗
dy - dz
⊗
dz
ηµν
=
η
(
∂
/
∂
x
µ
,
∂
/
∂
x
ν
) (
ηµν
) = ( 1 0 0 0 )
( 0 -1 0 0 )
( 0 0 -1 0 )
( 0 0 0 -1 )
Zauważmy, że macierz Grama (
ηµν
) kontrawariantnego tensora metrycznego
η
* w bazie { dx
µ
}3
µ
= 0 jest
zgodna z macierzą Grama (
ηµν
) kowariantnego tensora metrycznego
η
w bazie {
∂
/
∂
x
µ
}3
µ
= 0
( innymi słowy , macierz (
ηµν
) jest taka sama jak macierz do niej odwrotna, łatwo to wykazać przez
bezpośrednie mnożenie ) :
ηµν
=
ηµν
,
µ
,
ν
= 1,2, 3
Ponieważ będziemy wykorzystywali zarówno wielkości trój- jak i cztero- wymiarowe , ustalmy pewne
oznaczenia.
Oznaczenia.
Jeżeli A- jest wektorem w trójwymiarowej przestrzeni Euklidesa , to przez A oznaczymy stowarzyszoną z nim
(za pośrednictwem tensora metrycznego < . , . > = g ) 1-formę :
A = Ax
∂
/
∂
x + Ay
∂
/
∂
y + Az
∂
/
∂
z ⇒ A = Ax dx + Ay dy + Az dz

60
Przez *3 oznaczymy operator Hodge’a metrycznej formy objętości :
Ω
g = dx
∧
dy
∧
dz
w E3 ( będziemy nim działali na wektory , przeprowadzając je w 2-formy ) :
*3 (A
x
∂
/
∂
x + Ay
∂
/
∂
y + Az
∂
/
∂
z ) = Az dx
∧
dy - Ay dx
∧
dz + Ax dy
∧
dz
Przez * oznaczymy operator Hodge’a metrycznej formy objętości :
Ωη
= dt
∧
dx
∧
dy
∧
dz
w przestrzeni Minkowskiego M.
Definicja. Tensorem pola elektromagnetycznego (lub formą Maxwella-Faradaya ) nazywamy następującą
2-formę różniczkową na M :
F =
−
dt
∧
E + *3 B =
−
Ex dt
∧
dx
−
Ey dt
∧
dy
−
Ex dt
∧
dz + Bz dx
∧
dy
−
By dx
∧
dz + Bx dy
∧
dz =
=
ΣΣΣΣ
F
µν
dx
µ
∧
dx
ν
(3.62)
µ
<
ν
( 0 - Ex -Ey -Ez )
(F
µν
) =( Ex 0 Bz -By )
( Ey -Bz 0 Bx )
( Ez By -Bx 0 )
Czterowymiarowym wektorem gęstości prądu elektromagnetycznego nazywamy następujący wektor w
przestrzeni Minkowskiego :
J^ =
ρ
∂
/
∂
t + J =
∂
∂
/
∂
t + Jx
∂
/
∂
x + Jy
∂
/
∂
y + Jz
∂
/
∂
z ■
Wprowadzimy jeszcze czterowymiarowy 2-wektor F^ , stowarzyszony ( za pośrednictwem tensora
metrycznego
η
) z 2-formą F :
F ^ = tr (2,4)(1,2) (
η
*
⊗
η
*
⊗
F ) =
ΣΣΣΣ
F
µν
∂
/
∂
x
µ
∧
∂
/
∂
x
ν
, gdzie : F
µν
=
ηµα
ηνβ
F
αβ
( 0 Ex Ey Ez )
(F
µν
) = ( -Ex 0 Bz -By )
( -Ey -Bz 0 Bx )
( -Ez By -Bx 0 )
3.5.3 Równania Maxwella w języku form różniczkowych
Twierdzenie 3.6 Układ równań Maxwella (3.58) – (3.61) jest równoważny następującemu układowi równań :
dF = 0 (3.63)
d*F^ = 4
π
*J^ (3.64)
Dokładniej : równanie (3.63) jest równoważne równaniom (3.58) i (3.59) , a równanie (3.64) jest równoważne
równaniom (3.60) i (3.61).
◄ Dowód sprowadza się do prostych obliczeń we współrzędnych (t, x, y, z ). Rozpoczniemy od pierwszej pary
równań Maxwella .
dF = dE
∧
dt + d *3 B = [ (
∂
Ex /
∂
y) dy
∧
dx + (
∂
Ey
∂
z) dz
∧
dx + (
∂
Ex /
∂
t) dt
∧
dx + (
∂
Ey /
∂
x) dx
∧
dy +
+ (
∂
Ey /
∂
t) dt
∧
dz + (
∂
Ez /
∂
x) dx
∧
dz + (
∂
Ez /
∂
y) dy
∧
dz + (
∂
Ez /
∂
t) dt
∧
dz ]
∧
dz +
+ [ (
∂
Bx /
∂
x) + (
∂
By /
∂
y) + (
∂
Bz /
∂
z) ] dx
∧
dy
∧
dz + (
∂
Bz /
∂
t)dt
∧
dx
∧
dy - (
∂
By /
∂
t)dt
∧
dx
∧
dz -
- (
∂
Bx /
∂
t)dt
∧
dy
∧
dz .
Po uwolnieniu z nawiasów i skróceniu podobnych wyrazów otrzymujemy :
dF = [ (
∂
Bz /
∂
t) + (
∂
Ey/
∂
x) - (
∂
Ex/
∂
y) ] dt
∧
dx
∧
dy -
- [ (
∂
By /
∂
t) + (
∂
Ex/
∂
z) - (
∂
Ex/
∂
x) ] dt
∧
dx
∧
dz +
+ [ (
∂
Bx /
∂
t) + (
∂
Ez/
∂
y) - (
∂
Ey/
∂
z) ] dt
∧
dy
∧
dz +
+ [ (
∂
Bx /
∂
x) + (
∂
By/
∂
y) - (
∂
Bz/
∂
z) ] dx
∧
dy
∧
dz
lub stosując wzory dla obliczenia rotacji i dywergencji we współrzędnych kartezjańskich :
dF = [ (
∂
Bz /
∂
t) + ( rot E )z ] dt
∧
dx
∧
dy - [ (
∂
By /
∂
t) + ( rot E )y ] dt
∧
dx
∧
dz +
+ [ (
∂
Bx /
∂
t) + ( rot E )x ] dt
∧
dy
∧
dz + div B dx
∧
dy
∧
dz (3.65)

61
Stąd jest jasne , że dF = 0 w tym i tylko w tym przypadku kiedy słuszne są zależności (3.58) i (3.59).
Przejdziemy teraz do drugiej pary równań Maxwella. Obliczymy na początku składowe 2-formy *F^ :
(*F^)
µν
= ½
εαβµν
F
αβ
, skąd otrzymujemy :
(*F^ )01 = ½ (
ε
2301 B
x +
ε
3201 (-B
x) ) = Bx
(*F^ )02 = ½ (
ε
1302 (-B)
y +
ε
3102 B
y ) = By
(*F^ )03 = ½ (
ε
1203 B
z +
ε
2103 (-B
z ) ) = Bz
(*F^ )12 = ½ (
ε
0312 E
z +
ε
3012 (-E
z ) ) = Ez
(*F^ )13 = ½ (
ε
0213 E
y +
ε
2013 (-E
y ) ) = -Ey
(*F^ )23 = ½ (
ε
0123 E
x +
ε
1023 (-E
x ) ) = Ex
Zatem :
*F^ = Bx dt
∧
dx + By dt
∧
dy + Bz dt
∧
dz + Ez dx
∧
dy - Ey dx
∧
dz + Ex dy
∧
dz = dt
∧
B + *3 E. (3.66)
Porównując (3.62) i (3.66) widzimy , że przy formalnej zmianie zmiennych :
B
→
E , E
→
−
B
prawa strona (3.62) przekształca się w prawą stronę (3.66). Dlatego nie ma konieczności prowadzić dokładnych
wyliczeń dla d*F^. Wystarczy zamienić B na E oraz E na –B w wyrażeniach dla dF.
d*F^ = [ (
∂
Ez /
∂
t) - ( rot B )z ] dt
∧
dx
∧
dy - [ (
∂
Ey /
∂
t) - ( rot B )y ] dt
∧
dx
∧
dz +
+ [ (
∂
Ex /
∂
t) - ( rot B )x ] dt
∧
dy
∧
dz + div E dx
∧
dy
∧
dz (3.67)
Pozostaje nam obliczyć 3-formę *J^ -dualną do czterowymiarowego wektora gęstości prądu : J =
ρ∂
/
∂
t + J :
(*J)
αβγ
=
εµαβγ
J
µ
, skąd otrzymujemy :
(*J)012 =
εµ
012 J^
µ
=
ε
3012 J^
3 = -J^3 = - Jz ,
(*J)013 =
εµ
013 J^
µ
=
ε
2013 J^
2 = -J^2 = - Jy ,
(*J)023 =
εµ
023 J^
µ
=
ε
1023 J^
1 = -J^1 = - Jx ,
(*J)123 =
εµ
0123 J^
µ
=
ε
0123 J^
0 = -J^0 =
ρ
Zatem :
d*J^ = -Jz dt
∧
dx
∧
dy + Jy dt
∧
dx
∧
dz - Jx dt
∧
dy
∧
dz +
ρ
dx
∧
dy
∧
dz (3.68)
Porównanie prawych stron (3.67) i (3.68) pokazuje, że : d*F^ = 4π*J^ , w tym i tylko w tym przypadku jeżeli
słuszne są zależności (3.60) i (3.61). ►
Zauważmy jedną prostą własność wynikającą z równania (3.64). Obliczając różniczkę zewnętrzną obu stron
równania (3.64) , znajdujemy :
0 =d*J^ = divΩg J^ = (
∂
J
µ
/
∂
x
µ
) =
∂ρ
/
∂
t +
∂
Jx/
∂
x +
∂
Jy/
∂
y +
∂
Jz/
∂
z =
∂ρ
/
∂
t + divΩg J .
Zatem, prędkość zmiany w czasie gęstości objętościowej ładunku elektrycznego jest równa minus dywergencji
wektora gęstości prądu elektrycznego :
∂ρ
/
∂
t =
−
div J.

62
4. Całkowanie form różniczkowych
4.1 Całka formy różniczkowej.
4.1.1 Wycieczka w analizę : zmiana zmiennych w całce wielokrotnej
Przypomnijmy znane z wykładu analizy twierdzenie dotyczące zmiany zmiennych pod znakiem całki Riemanna.
Wystarczy nam tylko następujący szczególny wariant tego twierdzenia.
Niech będą dane : zamknięty mierzalny w sensie Jordana zbiór S
⊂
Rn i dyffeomorfizm ( „zmiana zmiennych” )
η
: X
→
Y , y =
η
(x)
pewnego otoczenia X
⊃
S zbioru S na otwarty zbiór Y =
η
(X).
Wtedy dla dowolnej ciągłej funkcji f :
η
(S)
→
R słuszna jest równość :
∫
f(y) dy1 ... dyn =
∫
|det (
∂
y/
∂
x) | f (
η
(x) ) dy1 ... dyn (4.1)
η
(S) S
lub w zapisie bezwspółrzędnościowym :
∫
f =
∫
|det d
η
| ( f
°
η
) (4.2)
Uwaga. Sformułowane powyżej twierdzenie pozostaje słuszne , jeśli jego warunki są naruszone na zbiorze
miary zero - rzykładowo w punktach naruszających wzajemną jednoznaczność lub w których jakobian staje się
równy zeru.
***********
*) Przypomnijmy ,że zbiór L
⊂
Rn posiada n-wymiarową (w sensie Lebesgue’a ) miarę , jeżeli dla dowolnego
ε
> 0 możemy znaleźć skończony lub nieskończony szereg n-wymiarowych prostopadłościanów
{ Pi } , taki , że : L
⊂
∪
Pi oraz
Σ
vol (Pi ) <
ε
, gdzie : vol (P) – jest objętością P
i i
***********
A oto jedno z dokładnych sformułowań.: niech zbiory miary zero L
⊂
S i M
⊂
η
(S), takie , że
η
(L) = M,
a zbiory X\L i Y\M są otwarte,
η
dyfeomorficznie odwzorowuje X\L na Y\M i jakobian |
η
(x) | jest ograniczony
na S. Wtedy dla dowolnej funkcji ciągłej f :
η
(S)
→
R słuszna jest równość (4.2).
Faktem tym często posługujemy się przykładowo wtedy kiedy przy obliczaniu całki wielokrotnej przechodzimy
do współrzędnych krzywoliniowych - zbiór punktów osobliwych ma miarę zero (tak jest np. dla współrzędnych
cylindrycznych i sferycznych ).
4.1.2 Całkowanie zewnętrznych form różniczkowych w zorientowanej przestrzeni afinicznej
Niech P –będzie zorientowaną, rzeczywistą n-wymiarową przestrzenią afiniczną , stowarzyszoną z przestrzenią
wektorową V. Niech D
⊂
P – będzie zamkniętym mierzalnym w sensie Jordana zbiorem , a
Ω
- niech będzie
n-formą różniczkową , określoną w pewnym obszarze zbioru D. Rozpatrzmy pewien zorientowany układ
współrzędnych :
x = ( x1, ... , xn ) : U
→
Rn , D
⊂
U .
Na zbiorze U, n-formę różniczkową
Ω
, można przedstawić w postaci :
Ω
= ω dx1
∧
...
∧
dxn
gdzie : ω : U
→
R – jest funkcją gładką , ω =
Ω
1 ... n =
Ω
(
∂
/
∂
x1 ...
∂
/
∂
xn ).
Zdefiniujemy całkę od n-formy
Ω
na zbiorze D jako n-krotną całkę Riemanna od funkcji ω
°
x-1: x(u)
→
R , na
zbiorze x(d) tj. :
def
∫
Ω
=
∫
ω
°
x-1 =
∫
(ω
°
x-1 ) ( x1, ... , xn ) dx1 ... dxn (4.3)
D x(D) x(D)
Często (na mocy tradycji ) piszemy :
∫
ω dx1 ... dxn w miejsce
∫
(ω
°
x-1 ) ( x1, ... , xn ) dx1 ... dxn
x(D) x(D)
co nie jest całkiem prawidłowe, ponieważ funkcja ω jest określona na D
⊂
P, a nie na x(D)
⊂
Rn, jednak zapis
taki pozwala zapisać (4.3) w łatwej do zapamiętania postaci :
def
∫
ω dx1
∧
...
∧
dxn =
∫
ω dx1 ... dxn (4.4)
D x(D)

63
Musimy jeszcze sprawdzić niezależność definicji (4.3) od wyboru układu współrzędnych : x = ( x1, ... , xn )
Innymi słowy musimy udowodnić , że dla dowolnego innego zorientowanego układu współrzędnych :
x’ = ( x’1, ... , x’n ) : U’
→
Rn , D
⊂
U’ .
spełniona jest równość :
∫
ω’
°
x’-1 =
∫
ω
°
x-1
x’(D) x(D)
gdzie :
Ω
= ω’ dx’1
∧
...
∧
dx’n na U’
Jest to stosunkowo proste. Zauważmy w pierwszej kolejności, że na U
∩
U’ mamy :
ω’ = det (
∂
x/
∂
x’)
•
ω oraz det (
∂
x/
∂
x’ ) > 0 (4.5)
W istocie jest tak , bowiem dla każdego punktu p
∈
U
∩
U’ macierz Jakobiego (
∂
x/
∂
x’)p jest to macierz
przejścia od bazy {(
∂
/
∂
xi )p }
n
i = 1 do bazy {(
∂
/
∂
x’i )p }
n
i = 1, a ponieważ obie te bazy zadają jedną i tą samą
orientacje przestrzeni V, to wyznacznik macierzy przejścia jest dodatnio określony.
Wykorzystując wzory (4.2) ( w których S = x’(D) ,
η
= x
°
x-1 , f = ω
°
x-1 ) oraz wzory (4.5) , znajdujemy :
∫
ω
°
x-1 =
∫
| det (
∂
x/
∂
x’)|
•
(ω
°
x-1 ) ( x
°
x-1 ) =
∫
| det (
∂
x/
∂
x’)|
•
(ω
°
x’ -1 ) =
∫
ω’
°
x’ -1
x(D) x’(D) x’(D) x’(D)
co było do udowodnienia.
Ćwiczenie. Udowodnić, że przy zmianie orientacji całka od formy różniczkowej zmienia znak.
Uwaga. Dla istnienia całki
∫
ω dx1
∧
...
∧
dxn ogólnie nie jest obowiązkowe aby n-forma podcałkowa była
D
formą gładką tj. aby ω była funkcją gładką. W pełni wystarcza wymaganie ciągłości.
Przykład. Jeżeli na przestrzeni wektorowej V zadany jest tensor metryczny g, to można scałkować metryczna
formę objętości
Ω
g . W zorientowanych współrzędnych x = ( x
1, ... , xn ) jak wiadomo :
Ω
g =
√
|
γ
| dx1
∧
...
∧
dxn , gdzie :
| g11 , .... , g1n |
γ
= | ..................... | oraz : gij = g (
∂
/
∂
xi ,
∂
/
∂
xj )
| gn1 , .... , gnn |
dlatego :
∫
Ω
g =
∫
√
|
γ
| dx1
∧
...
∧
dxn , ( objętość zbioru D )
D x(D)
Niech przykładowo , wymiar n =3 , tensor metryczny g będzie tensorem euklidesowym , a D – sferą o
promieniu R :
D = { p
∈
P | x2 (p) + y2 (p) + z2 (p)
≤
R2 }
Niech (x, y, z) – będą współrzędnymi kartezjańskimi , a ( x1, x2 ,x2 ) = (r,
θ
,
ϕ
) – będą współrzędnymi
sferycznymi . Wtedy :
( g11, g12 , g13 ) ( 1 0 0 )
( g21, g22 , g23 ) = ( 1 r
2 0 ) ,
Ω
g = r
2 sin (
θ
) dr
∧
d
θ
∧
d
ϕ
( g31, g32 , g33 ) ( 1 0 r
2 sin2 (
θ
) )
x(D) = { (r,
θ
,
ϕ
)
∈
R3 | 0
≤
r
≤
R , 0
≤
θ
≤
π
, 0
≤
ϕ
≤
2
π
}
oraz :
R
π
2
π
∫
Ω
g =
∫ ∫ ∫
r2 sin (
θ
) dr d
θ
d
ϕ
=
∫
r2 dr
∫
sin (
θ
) d
θ
∫
d
ϕ
= 4/3
π
R3 .□
D x(D) 0 0 0

64
Uwaga. wyjaśniliśmy jak scałkować n-formę różniczkową po „wystarczająco dobrym zbiorze” D w rzeczywistej
n-wymiarowej zorientowanej przestrzeni afinicznej P. Jednak nie można zdefiniować w podobny sposób całki
od funkcji f : P
→
R. , ponieważ wynik całkowania będzie zależny od wyboru układu współrzędnych.
Aby scałkować taka funkcję, należy wiedzieć względem jakiego „elementu objętości” prowadzimy całkowanie
tj. musimy ustalić na samym początku na P pewną formę objętości
Ω
. Po tym całka od funkcji f na zbiorze D
zdefiniowana jest jako całka od n-formy f
•Ω
na zbiorze D :
∫
Ω
=
∫
f
•
Ω
D D
Przy takim określeniu wynik całkowania nie zależy od wyboru współrzędnych, jednak zależy od wyboru formy
objętości.
Powyższe stwierdzenie jest równoważne twierdzeniu o zmianie zmiennych pod znakiem całki wielokrotnej.
Twierdzenie 4.1 Niech P – będzie n-wymiarową zorientowaną przestrzenią afiniczną ; D
⊂
P – zbiorem
zamkniętym mierzalnym w sensie Jordana ; U,V
⊂
P – to zbiory otwarte i D
⊂
U ; h : U
→
V - niech będzie
dyfeomorfizmem spełniającym warunek :
det dh > 0 na U
Ω
- n-forma różniczkowa, zadana w obszarze zbioru h(D). Wtedy :
∫
h*
Ω
=
∫
Ω
(4.6)
D h(D)
◄ Niech y = ( y1 ... yn ) – będzie zorientowanym układem współrzędnych w obszarze h(D) , x = ( x1 ... xn )
- zorientowanym układem współrzędnych w obszarze D. Wtedy ,jeśli :
Ω
= ω dy1
∧
...
∧
dyn
to :
h*
Ω
= ( det dh ) ( ω
°
h ) dx1
∧
...
∧
dxn
W istocie cały dowód sprowadza się zatem do zastosowania wzoru (4.2) w którym : S = x(D) , f = ω
°
y-1 i
η
= y
°
h
°
x-1 . W tym przypadku otrzymujemy :
det d
η
= (det dh )
°
x-1 > 0
η
(S) = ( y
°
h
°
x-1 ) ( x(D) ) = y( h(D) )
f
°
η
= ω
°
y-1
°
y
°
h
°
x-1 = ( ω
°
h)
°
x-1 .
Z pomocą definicji (4.3) i wzoru (4.2) kolejno znajdujemy :
∫
Ω
=
∫
ω
°
y-1 =
∫
f =
∫
(det d
η
) ( f
°
η
) =
∫
[ ( det dh )
°
x-1 ] [ ( ω
°
h )
°
x-1 ] =
∫
[ (det dh ) ( ω
°
h )]
°
x-1 =
h(D) y(h(D))
η
(S) S x(D) x(D)
=
∫
h*
Ω
co było do udowodnienia ►
Uwaga. Twierdzenie 4.1 pozostaje słuszne , jeżeli jego warunki naruszone są na zbiorze miary zero , zobacz
uwaga po wzorze (4.2). Dokładne jego sformułowanie dla takiego przypadku pozostawiamy jednak
czytelnikowi.
Uwaga. Z dowodu twierdzenia 4.1 wynika , że jeżeli warunek det dh > 0 na U, zamienić na warunkiek :
det dh < 0 na U, to w miejsce (4.6) słuszna będzie równość :
∫
h*
Ω
=
−
∫
Ω
D h(D)
4.1.3 Całkowanie form różniczkowych na łańcuchach
Zdefiniowaliśmy całkę od k-formy różniczkowej na zorientowanej „k-wymiarowej powierzchni” , która rozpada
się na kilka „elementarnych” kawałków , przedstawiających sobą obrazy „dostatecznie prostych obszarów ” w
Rk , przy odwzorowaniach różniczkowalnych. Z punktu widzenia prostoty definicji i dowodów (jednak bez
utraty ogólności ) wygodnie jest uważać , że obszar zmienności parametrów każdego z takich elementarnych
k-wymiarowych kawałków jest zamkniętą kostką (sześcianem )jednostkową - Ik w przestrzeni Rk :
Ik = { (t1 ... tn )
∈
Rk | 0
≤
ti
≤
1, i = 1.. k } = |0,1|
×
...
×
|0,1|
------k razy ----
65
Tak zdefiniowane elementarne kawałki będziemy nazywali zorientowanymi osobliwymi kostkami
(sześcianami ), ich ścisłą definicje podamy później. Dla prostoty będziemy oznaczali standardowe funkcje
współrzędnościowe w Rk i punkty przestrzeni Rk (tj. uporządkowane podzbiory ze zbioru k liczb ) w
jednakowy sposób : (t1 ... tn ).
Przez
ℑ
k
(+) – będziemy oznaczać orientacje przestrzeni R
k , zadaną bazą :
{
∂
/
∂
t1, ... ,
∂
/
∂
tk } ,
∂
/
∂
tk = (0 ... 0, 1, 0...0 )
-- i-razy -
lub, co na jedno wychodzi, orientacje zadana przez formę objętości :
dt1
∧
...
∧
dtk.
Przeciwną do
ℑ
k
(+) orientacje będziemy oznaczać
ℑ
k
(-). Będziemy również wykorzystywać oznaczenie „-
ℑ
„
dla orientacji przeciwnej do
ℑ
.
Pod odwzorowaniem gładkim , zadanym na zbiorze A
⊂
Rk (nie koniecznie otwartym ), będziemy rozumieć
odwzorowanie zadawane w pewnym obszarze U zbioru A, tj. w zbiorze otwartym U
⊃
A.
Kostki osobliwe. Całka od formy różniczkowej po kostce osobliwej. Niezależność od wyboru
parametryzacji.
Zanim sformułujemy ścisłą definicję zorientowanej kostki osobliwej, rozpatrzymy pewne pomocnicze pojęcia.
Jednowymiarowa zorientowana kostka – to krzywa zorientowana. Zadanie orientacji krzywej oznacza wybór
kierunku skierowania ruchu wzdłuż tej krzywej przy wzroście parametru. Jeżeli dokonamy zmiany
parametryzacji na krzywej za pomocą funkcji , pochodna której jest wszędzie dodatnia , to skierowanie ruchu,
wzdłuż krzywej nie zmieni się. Jeżeli jednak dokonamy zmiany parametru (reparametryzacji )za pomocą funkcji
pochodna której wszędzie jest ujemna , to kierunek ruchu zmieni się na przeciwny. Zmianę parametru
τ
= a(t),
można interpretować jako przejście od współrzędnej t na R do współrzędnej
τ
.
Przy tym :
-
jeżeli wszędzie jest : da/dt > 0, to współrzędne t i
τ
zadają jednakową orientacje przestrzeni R;
-
jeżeli wszędzie jest : da/dt < 0, to współrzędne t i
τ
zadają przeciwne orientacje przestrzeni R.
-
Zatem – zadanie orientacji krzywej jest równoważne zadaniu orientacji w przestrzeni R , zmienności tej krzywej.
Dwuwymiarową zorientowaną kostką w trójwymiarowej przestrzeni jest powierzchnia zorientowana. Orientacja
powierzchni określona jest przez wybór skierowania normalnej do tej powierzchni w każdym jej punkcie.
(poglądowo , jest to wybór jednej ze „stron” powierzchni ).
Jeżeli r = r(u, v) – jest równaniem parametrycznym powierzchni a współrzędne ( t1 = u, t2 = v) są orientowalne
,to wektor :
N = (
∂
r/
∂
t1)
×
(
∂
r/
∂
t2)
zadaje dodatnie skierowanie normalnej ( z końca wektora N widać „dodatnią“ stronę powierzchni ).
Jeżeli tylko przenumerujemy współrzędne ( t1 = v, t2 = u), to wektor N zmieni znak (jest to znana własność
iloczynu wektorowego ). W takim razie układy współrzędnych (u, v) i (v., u) zadają w R2 przeciwne orientacje
(jest tak ponieważ wyznacznik macierzy przejścia od bazy {
∂
/
∂
u,
∂
/
∂
v }do bazy {
∂
/
∂
v,
∂
/
∂
u } jest równy –1 ).
Zatem zadanie orientacji powierzchni jest równoważne zadaniu orientacji w przestrzeni R2 , zmienności
parametrów tej powierzchni.
Wniosek : orientację k-wymiarowej powierzchni zadanej parametrycznie, (k-wymiarowa osobliwa kostka )
naturalnie jest zadać jako orientację przestrzeni Rk, w której znajduje się obszar zmienności parametrów
określających tą powierzchnię. Przejdziemy teraz do ścisłej definicji zorientowanej osobliwej kostki.
Niech P –będzie pewną rzeczywistą przestrzenia afiniczną o wymiarze n.
Definicja. Osobliwą k-wymiarową (zorientowaną ) kostką w przestrzeni P (dim P = n
≥
k ) nazywamy parę :
C = (
ℑ
k ,
ϕ
)
złożoną z odwzorowania gładkiego :
ϕ
: Ik
→
P
oraz pewnej orientacji
ℑ
k przestrzeni Rk , o orientacji tej mówimy również jako o orientacji osobliwej kostki.
Odwzorowanie
ϕ
nazywamy „parametryzacją” osobliwej kostki C. Nośnikiem osobliwej kostki C jest zbiór
ϕ
(Ik )
⊂
P.

66
Osobliwą kostkę różniącą się od zadanej osobliwej kostki C , tylko wyborem orientacji w przestrzeni
parametrów oznaczamy przez : -C tj. – (
ℑ
k ,
ϕ
) = ( -
ℑ
k ,
ϕ
). ■
Określenie „zorientowana” będziemy opuszczać, ponieważ niezorientowanych osobliwych kostek nie będziemy
rozważać. Jeżeli orientacja k-wymiarowej osobliwej kostki nie jest jawnie wskazana , to należy uważać
(domyślnie ) , że mamy na myśli orientację dodatnią tj. :
ℑ
k
(+) .
Często będziemy wykorzystywać uproszczone oznaczenia :mówiąc o osobliwej kostce będziemy wskazywać
tylko jej nośnik - jeżeli z kontekstu jest jasne jaką właściwie parametryzację i orientację mamy na myśli.
Definicja. Niech C = (
ℑ
k ,
ϕ
) – będzie osobliwą k-wymiarową kostką ,
Ω
- k-formą różniczkową , określoną
w pewnym obszarze zbioru
ϕ
(Ik ) . Całka formy
Ω
po kostce C określona jest równaniem :
def
∫
Ω
=
∫
ϕ
*
Ω
=
±
∫
ω dt1
∧
...
∧
dtk. (4.7)
C Ik Ik
gdzie :
ϕ
*
Ω
= ω dt1
∧
...
∧
dtk. (porównać ze wzorem (4.6) )
Całkę od
ϕ
*
Ω
obliczamy uwzględniając koniecznie zadaną orientację
ℑ
k przestrzeni Rk tj. znak „+” w prawej
części (4.7) odpowiada przypadkowi
ℑ
k =
ℑ
k
(+) , a znak „ - „ przypadkowi
ℑ
k =
ℑ
k
(-) . ■
Z definicji (4.7) jest jasne, że przy zmianie orientacji zorientowanej kostki , całka od formy różniczkowej po tej
kostce zmienia znak :
∫
Ω
=
−
∫
Ω
(4.8)
-C C
Dla praktycznych celów obliczeniowych jest zupełnie obojętne czy obszar określoności parametryzacji
osobliwej kostki jest zamkniętą osobliwą kostką Ik.
Następująca sytuacja jest charakterystyczna dla omawianych zagadnień.
Niech będzie zadana : k-wymiarowa osobliwa kostka C = (
ℑ
k ,
ϕ
: Ik
→
P ), zamknięty , mierzalny zbiór
D
⊂
Rk , oraz gładkie odwzorowanie
ψ
: D
→
P , Ik
→
Rk , spełniające warunki :
1) h(Ik ) = D
2) h spełnia warunki twierdzenia 4.1 o zmianie zmiennych (które mogą być naruszone co najwyżej na zbiorze
miary zero )
3)
ϕ
=
ψ
°
h
Innymi słowy,
ψ
- jest faktycznie inną parametryzacją C, jednak obszarem zmienności parametrów tej
parametryzacji D, nie musi być obowiązkowo jednostkowa kostka, odwzorowanie h , ukazuje odpowiedniość
między starymi i nowymi parametrami. (wzajemna jednoznaczność tej odpowiedniości może być naruszona co
najwyżej na zbiorze miary zero ).
W tym przypadku w celu obliczenia całki od
Ω
względem C możemy wykorzystać parametryzację
ψ
, jeżeli jest
ona bardziej dogodna, w tym przypadku mamy :
∫
Ω
=
∫
ψ
*
Ω
C D
(całkę po prawej stronie obliczamy uwzględniając zadaną orientację
ℑ
k )
◄ Wykorzystując własność (
ψ
°
h )* = h*
°
ψ
* i twierdzenie 4.1 , otrzymujemy :
∫
Ω
=
∫
ψ
*
Ω
=
∫
(
ψ
°
h )*
Ω
=
∫
h*
ψ
*
Ω
=
∫
ψ
*
Ω
=
∫
ψ
*
Ω
►
C Ik Ik Ik h( Ik) D

67
Przykład. Scałkujmy 2-formę różniczkową :
Ω
= dx
∧
dy + z dx
∧
dz
względem 2-wymiarowej osobliwej kostki (
ℑ
2
(+) ,
ϕ
).
ϕ
: I2
→
R3 ,
ϕ
(u, v) = ( u cos (2
π
v) , u sin (2
π
v) , u ), u = t1 , v = t2 .
Sposób pierwszy.
Znajdujemy obraz odwrotny :
ϕ
*
Ω
:
ϕ
*( dx
∧
dy) = d( u cos (2
π
v) )
∧
d( u sin (2
π
v) ) = 2
π
u du
∧
dv,
ϕ
*( z dx
∧
dz) = u d( u cos (2
π
v) )
∧
du = 2
π
u2 sin (2
π
v) du
∧
dv,
ϕ
*
Ω
= 2
π
u (1 + u sin (2
π
v) ) du
∧
dv,
a następnie obliczamy całkę względem kwadratu jednostkowego :
1 1 1 1
∫
ϕ
*
Ω
= 2
π
∫
u du
∫
dv + 2
π
∫
u2 du =
∫
sin (2
π
v) dv =
π
I2 0 0 0 0
Sposób drugi.
Rozpatrzmy zbiór (kostkę jednostkową) : D = { (x, y)
∈
R2 | x2 + y2
≤
1 } oraz odwzorowania :
h : I2
→
D , h(u, v) = (u cos (2
π
v) , u sin (2
π
v) )
ψ
: D
→
R3 .
ψ
(x, y) = ( x, y, sqrt ( x2 + y2 ) )
Łatwo zauważyć , że powyższe warunki nakładają następujące ograniczenia :
h(I2 ) = D ,
ψ
°
h =
ϕ
,
∂
(x, y) /
∂
(u, v) = 2
π
u > 0 na I2 (oprócz zbioru miary zero)
Znajdujemy obraz odwrotny
ψ
*
Ω
:
ψ
*(dx
∧
dy ) = dx
∧
dy.
ψ
*(z dx
∧
dz ) = sqrt ( x2 + y2 ) dx
∧
d( sqrt ( x2 + y2 ) ) = y dx
∧
dz,
ψ
*
Ω
= (1 + y) dx
∧
dy
i obliczamy całkę względem okręgu jednostkowego :
∫
ϕ
*
Ω
=
∫ ∫
dx dy +
∫ ∫
y dx dy =
π
D D D
Pierwsza z całek podwójnych jest równa jest polu okręgu jednostkowego , druga jest równa zeru , co jest jasne i
bez obliczeń, ponieważ funkcja podcałkowa jest nieparzystą na każdej prostej x = const. względem punktu
(const. , 0 ), oś odciętych jest osią symetrii zwierciadlanej dla obszaru całkowania.
Geometryczny sens parametryzacji
ψ
, jest następujący : nośnikiem rozpatrywanej osobliwej kostki jest
powierzchnia boczna stożka ograniczonego powierzchniami :
x2 + y2 = z2 , z = 0 , z = 1
za parametry (x, y) dowolnego punktu tej powierzchni przyjmujemy współrzędne kartezjańskie rzutów
współrzędnych tego punktu na płaszczyznę Oxy. □
Przykłady.
1). Niech C = (
ℑ
1
(+) , c : [ 1, 0 ]
→
P ) – będzie 1-wymiarową osobliwą kostką (krzywą) w n-wymiarowej
przestrzeni afinicznej P. A c , niech będzie 1-formą różniczkową w P.
Jeżeli (x1, ... xn ) – są współrzędnymi regularnymi w otoczeniu nośnika C i A = Ai dx
i – to jak łatwo zauważyć :
c*A = Ac (dc/dt)
•
dt = (Ai
°
c )
•
(dxi /dt ) , gdzie : (dxi (t) /dt ) = dxi ( c(t) )/dt
Zgodnie z definicją , całka od 1-formy A względem jedno wymiarowej , osobliwej kostki C , jest równa :
1 1
∫
A =
∫
Ai ( c(t) ) dx
i ( c(t) )/dt =
∫
Ac(t) (dc(t) /dt) dt (4.9)
C 0 0
Co prowadzi nas do znanego wzoru na całkę krzywoliniową II rodzaju. W tradycyjnym wykładzie analizy
matematycznej , całka krzywoliniowa II rodzaju zwykle traktowana jest jako całka od pola wektorowego wzdłuż
krzywej - dokładniej : od iloczynu skalarnego pola wektorowego i wektora stycznego do krzywej (praca siły na
przemieszczeniu ). Jednak my nie całkujemy wektora , a 1-formę.
Można to wyjaśnić całkiem prosto - jeżeli w naszej przestrzeni afinicznej zadany jest tensor metryczny :
g = gij dx
i
⊗
dxj .

68
to pól – wektorowego i kowektorowego można nie rozróżniać. W tym przypadku pole wektorowe :
A = Ak
∂
/
∂
dxk
utożsamiamy z 1-formą różniczkową :
A = Ai dx
i , A
i = gik A
k
Dla tego przypadku możemy również zdefiniować całkę od A , jako całkę od stowarzyszonej z A 1-formy A :
1 1 1
∫
Ai (dx
i/dt) dt =
∫
gik A
k (dxi/dt) dt =
∫
g (Ac(t) (dc(t) /dt) dt
0 0 0
Jeżeli droga c jest zamknięta tj. c(0) = c(1), to całka ta nazywa się „cyrkulacją” (krążeniem) pola wektorowego
A po c .
2) Jeżeli
Ω
- jest zespoloną k-formą , na rzeczywistej przestrzeni afinicznej tj. wyrażeniem postaci :
Φ
+ i
Ψ
,
gdzie ;
Φ
,
Ψ
- są zwykłymi k-formami przyjmującymi wartości rzeczywiste w tej przestrzeni, to zgodnie z
definicją :
∫
C (
Φ
+ i
Ψ
) =
∫
C
Φ
+ i
∫
C
Ψ
.
Niech : f = u + iv – będzie funkcją ciągłą zmiennej zespolonej z = x + iy ,
γ
- gładka krzywą (tj. jedno
wymiarową osobliwą kostką ) w przestrzeni zespolonej C, którą rozpatrujemy jako dwuwymiarową rzeczywistą
przestrzeń afiniczną o współrzędnych (x, y). Całka od funkcji f po
γ
, jak łatwo zauważyć , jest tym samym , co
całka po
γ
1-formy zespolonej : f dz = (u + iv ) (dx + idy ) :
∫
f dz =
∫
(u dx
−
v dy ) + i
∫
(v dx + u dy )
γ
γ
γ
Wynika to bezpośrednio z omawianych (odpowiednich) zależności.
3) Niech : C = (
ℑ
2
(+) , r : I
2
→
E3 ) – będzie dwu wymiarową kostką osobliwą w trój wymiarowej
zorientowanej przestrzeni Euklidesa E3.
Rozpatrzmy w E3 2-formę różniczkową :
A = R dx
∧
dy – Q dx
∧
dz + P dy
∧
dz
gdzie : (x, y, z ) – są zorientowanymi współrzędnymi kartezjańskimi , określonymi w pewnym obszarze zbioru
r ( I2 ). Proste rachunki pokazują , że :
r*A = < *A,
∂
r/
∂
u
×
∂
r
∂
v >
•
du
∧
dv , u = t1 , v = t2 .
Gdzie symbol <. , . > oznacza iloczyn skalarny, a * - jest operatorem Hodge’a metrycznej formy objętości
dx
∧
dz
∧
dz , przeprowadzającym 2-formy w wektory . Zatem :
*A = P
∂
/
∂
x + Q
∂
/
∂
y + R
∂
/
∂
z
W przypadku kiedy wektory :
∂
r/
∂
u i
∂
r
∂
v są liniowo niezależne w każdym punkcie (u, v )
∈
I2 tj. funkcja
wektorowa r zadaje parametryzację pewnej dwuwymiarowej powierzchni ( z brzegiem ), możemy wprowadzić i
rozpatrywać wektor jednostkowy (zadający orientacje ), normalny do powierzchni :
n = (
∂
r/
∂
u
×
∂
r
∂
v ) / |
∂
r/
∂
u
×
∂
r
∂
v | = (
∂
r/
∂
u
×
∂
r
∂
v | / sqrt (EG – F2 )
gdzie : E = <
∂
r/
∂
u ,
∂
r
∂
v > , F = <
∂
r/
∂
u ,
∂
r
∂
v > , G = <
∂
r/
∂
v ,
∂
r
∂
v >
Wtedy wyrażenie dla r*A możemy przedstawić w postaci :
r*A = < *A, n >
•
sqrt (EG – F2 ) du
∧
dv
Zgodnie z definicją całka 2-formy A po 2-wymiarowej kostce C , jest równa :
∫
A =
∫ ∫
< *A , n > sqrt (EG – F2 ) du dv (4.10)
C I2
Zatem dochodzimy do znanego wzoru dla całki powierzchniowej II rodzaju (strumień pola wektorowego *A
przez powierzchnię C ). □
69
Łańcuchy. Całka od formy różniczkowej po łańcuchu.
Nawet dla przypadku jednowymiarowego jest jasne , że niewygodnie jest ograniczać się do konturów
całkowania, składających się z jednego parametryzowanego kawałka. Wielokrotnie konieczne jest
wprowadzanie konturów składających się z kilku kawałków , które mogą przechodzić na różne strony (chodzi o
ich orientacje ). Analogiczne pojęcie dla przypadku dowolnego wymiaru nazywa się „łańcuchem”.
Definicja. k-wymiarowym łańcuchem nazywamy zbiór :
C = {l1 ... lm ; C1 ... Cm }
w którym : Ci - jest osobliwą zorientowaną , k-wymiarową kostką ; li – są liczbami całkowitymi nazywanymi
„krotnościami”. Przyjęto zapisywać łańcuch w postaci formalnej kombinacji liniowej :
m
C = l1C1 + ... + lm Cm =
ΣΣΣΣ
li Ci
i = 1
Nośnikiem łańcucha nazywamy sumę mnogościową nośników składowych łańcucha - tj. osobliwych kostek.
Całka od k-formy różniczkowej
Ω
po łańcuchu :
m
C =
ΣΣΣΣ
li Ci
i = 1
określona jest zgodnie z jej liniowa własnością jako :
def m
∫
Ω
=
ΣΣΣΣ
li
∫
Ω
■ (4.11)
i = 1
Uwaga. Wygodnie jest określić 0-wymiarowy łańcuch w przestrzeni afinicznej P jako zbiór punktów z P razem
z ich krotnościami :
C = {l1 ... lm ; p1 ... pm } , gdzie : p1
∈
P , li
∈
Z .
Całka od 0-formy , tj. funkcji - f , po 0-wymiarowym łańcuchu C, określona jest jako suma :
def
∫
f = l1 f ( p1) + ... + lm f ( pm) .
W związku z ostatnim przykładem ( zobacz (4.10) ) , wprowadzimy jeszcze jedną definicję.
Definicja. Niech C – będzie (n -1)-wymiarowym łańcuchem (tj. „powierzchnią” ) w n-wymiarowej przestrzeni
afinicznej P ;
Ω
- formą objętości na stowarzyszonej z P przestrzeni wektorowej; A – polem wektorowym ,
określonym w pewnym obszarze nośnika C. „Strumieniem” pola A przez powierzchnię C nazywamy wielkość :
∫
*A.
C
gdzie : * - jest operatorem Hodge’a formy objętości
Ω
, przeprowadzającym wektory w (n-1)-formy.
Oczywiście , strumień A przez C zależy nie tylko od A i C , ale również od wyboru formy objętości
Ω
■
Brzeg osobliwej kostki i łańcucha.
Pojęcie brzegu osobliwej kostki i brzeg łańcucha jest wygodną formalizacją i uogólnieniem takich „intuicyjnie
jasnych” pojęć jak np. : (topologiczny) brzeg zbioru na płaszczyźnie (i ogólnie w przestrzeni afinicznej
dowolnego wymiaru ), brzeg 2-wymiarowej powierzchni w 3-wymiarowej przestrzeni.
********
*) Przypomnijmy ,że w topologii brzegiem zbioru M nazywamy zbiór wszystkich punktów brzegowych zbioru
M. Punkt p nazywamy „punktem brzegowym” zbioru M , jeżeli dowolne otoczenie punktu p zawiera punkty
należące do M , jak i punkty nie należące do M.
********
Brzeg osobliwej, zorientowanej, k-wymiarowej kostki jest (k-1)-wymiarowym łańcuchem.
W szczególności pojęcie brzegu osobliwej kostki zawiera w sobie również zasadę jej orientacji.
Na początek zdefiniujmy łańcuch brzegowy, zamkniętej jednostkowej kostki I2
⊂
Rk, który będziemy
rozpatrywać jako osobliwą kostkę (
ℑ
k
(+) , Id ) w R
k z orientacją
ℑ
k
(+) i parametryzowanym odwzorowaniem
tożsamościowym Id : Ik
→
Rk , Id (t) = t.

70
Topologiczny brzeg
∂
Ik kostki Ik jest sumą mnogościową jego (k – 1)-wymiarowych brzegów :
k 1
∂
Ik =
∪
∪
∪
∪
∪
∪
∪
∪
Ik
∩
Rk
−
1
is .
i =1 s = 0
Każdy (k – 1)-wymiarowy brzeg Ik
∩
Rk
−
1
is jest to przecięcie kostki i hiperpłaszczyzny R
k
−
1
is
⊂
Rk .
Rk
−
1
is = { ( t
1, ... , tk )
∈
Rk | ti = s } ; i = 1 ... k ; s = 0 ... 1 .
Brzeg Ik
∩
Rk-1is rozpatrujemy jako (k – 1)-wymiarową osobliwą kostkę w R
k z parametryzacją injektywną
ϕ
is : R
k
−
1
→
Rk ;
ϕ
is ( I
k -1 ) = Ik
∩
Rk
−
1
is .
ϕ
is ( t
1, ... , tk ) = ( t1, ... , ti - 1 , s , ti, ... , tk
−
1 )
(4.12)
Mówiąc prościej,
ϕ
is działa następująco : R
k –1 utożsamiamy z hiperpłaszczyzną Rk
−
1
i0
⊂
Rk ,
( ti, ... , tk
−
1 ) |
→
( t1, ... , ti - 1 , 0 , ti, ... , tk
−
1 )
a zatem hiperpłaszczyzna Rk
−
1
i0 przemieszcza się o stały wektor :
s
∂
/
∂
ti = ( 0, ... 0, s, 0,... , 0 )
----- i ----
I dalej – brzeg Ik
∩
Rk
−
1
is wyposażymy w orientacje (
−
1)i + s
ℑ
k
−
1
(
±
) , tj. wybieramy orientacje
(-1)i + s
ℑ
2
(+) – jeżeli orientacja kostki I
k jest
ℑ
2
(+) ,lub wybieramy orientacje (
−
1)i + s
ℑ
k
−
1
(-) , w
przeciwnym wypadku.
Definicja. Brzegiem k-wymiarowej , jednostkowej kostki Ik
⊂
Rk , rozpatrywanej jako osobliwa kostka
(
ℑ
k
(
±
) ,Id ), nazywamy następujący (k
−
1)-wymiarowy łańcuch :
k 1
∂
(
ℑ
k
(+) , Id ) =
ΣΣΣΣ
ΣΣΣΣ
(-1)i + s (
ℑ
k
−
1
(+) ,
ϕ
is ) (4.13)
i = 1 s = 0
gdzie :
ϕ
is – jest definiowane wzorem (4.12).
Mniej formalną , lecz często spotykaną w literaturze , formą zapisu definicji (4.13) jest :
k 1
∂
(
±
Ik ) =
±
ΣΣΣΣ
ΣΣΣΣ
(-1)i + s ( Ik
∩
Rk-1is ) (4.14)
i = 1 s = 0
(we wzorze tym , zgodnie z naszą umową dotyczącą uproszczenia zapisu , pod Ik , rozumiemy osobliwą kostkę
(
ℑ
k
(+) , Id ) , a pod I
k
∩
Rk-1is - osobliwą kostkę (
ℑ
k - 1
(+) ,
ϕ
is ), zmiana znaku oznacza przejście do
osobliwej kostki która ma przeciwną orientację )
Uwaga. Wzory (4.13) , (4.14) są prostym zapisem dobrze znanej zasady zgodności orientacji obszaru i jego
brzegu, które to zastosowane dla naszego przypadku formułujemy następująco :
Rozpatrzmy dowolny brzeg kostki Ik . Niech n – będzie zewnętrzną (w stosunku do kostki) normalną
rozpatrywanego brzegu. Baza brzegu {v1, ... , vk - 1 } uważamy za zorientowaną w tym i tylko w tym
przypadku jeśli baza {n , v1, ... , vk - 1 } jest zorientowana w R
k, (zobacz rysunek 4 )
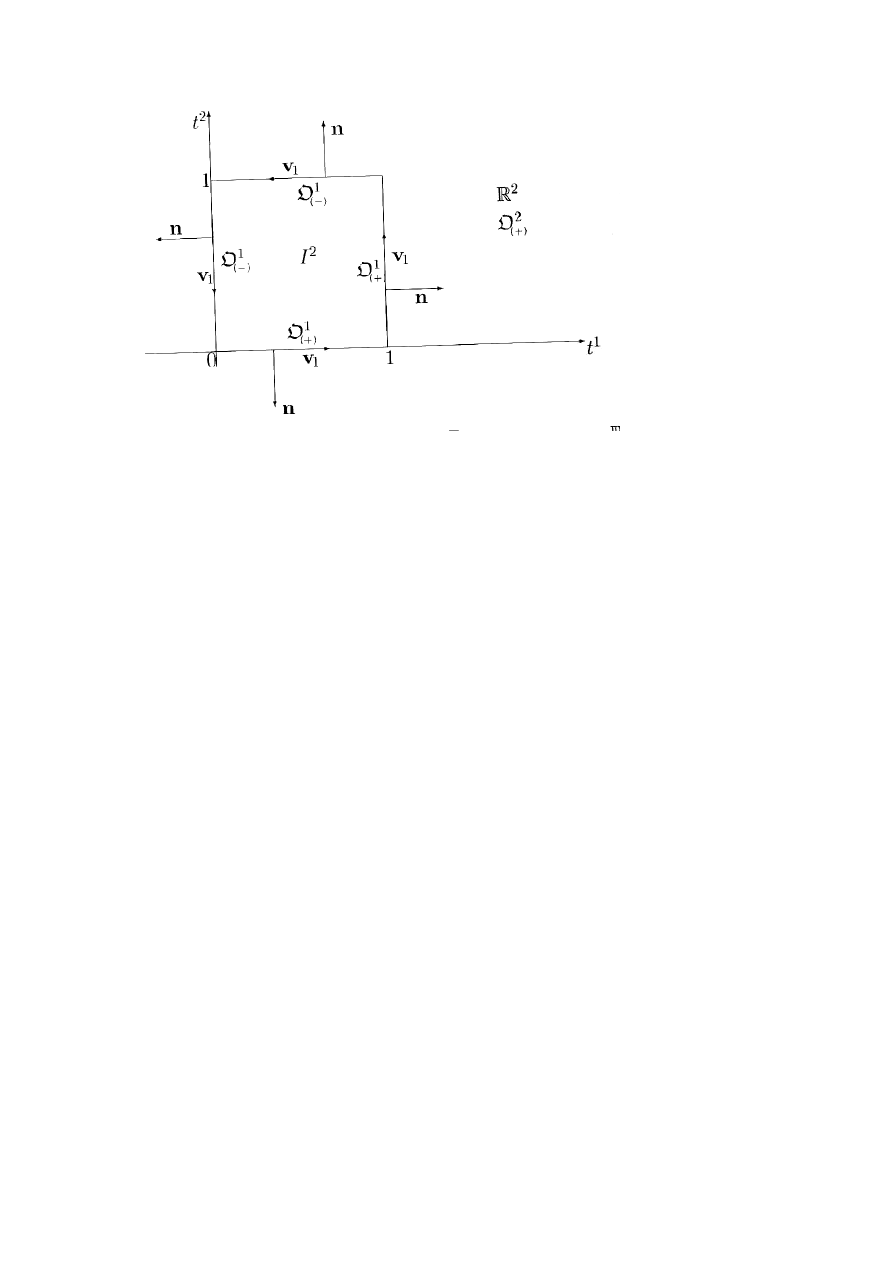
71
Rys. 4 Orientacja brzegu kwadratu.
Jeżeli orientacja R2 zadana jest przez 2-formę dt1
∧
dt2 , to obejście brzegu w kierunku dodatnim zachodzi
przeciwnie do ruchu wskazówek zegara.
Uwaga. Przy k = 1, jeśli rozumieć pod I1
∩
R01s jednopunktowy zbiór { s }
⊂
R , wzór (4.14) przyjmuje
postać :
∂
(
±
[0, 1] ) =
±
( 1 – 0 )
(brzeg dodatnio zorientowanego odcinka , to 0-wymiarowy łańcuch : punkt t = 1 brany jest ze znakiem + , a
punkt t = 0 , brany jest ze znakiem - )
niech C = (
ℑ
k
(
±
) ,
ϕ
) – będzie k-wymiarową, zorientowana osobliwą kostką w przestrzeni afinicznej P.
Obraz
ϕ
( Ik
∩
Rk – 1is ) każdego brzegu kostki I
k naturalnie jest rozpatrywać jako
(k – 1 )-wymiarową
osobliwą kostkę w P o parametryzacji :
ϕ
°
ϕ
is : I
k -1
→
P
i orientacji : (-1)i + s
ℑ
k-1
(
±
) .
Definicja. Brzegiem k-wymiarowej osobliwej kostki C = (
ℑ
k
(
±
) ,
ϕ
) nazywamy następujący
(k – 1) –wymiarowy łańcuch :
k 1
∂
(
ℑ
k
(
±
) ,
ϕ
) =
ΣΣΣΣ
ΣΣΣΣ
(-1)i + s (
ℑ
k-1
(
±
) ,
ϕ
°
ϕ
is ) (4.15)
i=1 s=0
Mniej formalną , lecz często spotykaną w literaturze formą zapisu definicji (4.15) jest zależność postaci :
k 1
∂
(
±
ϕ
(Ik ) ) =
±
ΣΣΣΣ
ΣΣΣΣ
(-1)i + s
ϕ
( Ik
∩
Rk – 1is ) (4.16)
i=1 s=0
( zobacz opis pod wzorem (4.14) )
Brzeg łańcucha definiujemy wykorzystując jego liniowość :
m m
∂
(
ΣΣΣΣ
l1C1 ) =
ΣΣΣΣ
l1
∂
C1 ■ (4.17)
i=1 i=0

72
Uwaga. Przy k = 1, jeśli rozumieć pod I1
∩
R01s jednopunktowy zbiór { s }
⊂
R , wzór (4.16) przyjmuje
postać :
∂
(
±
[0, 1] ) =
±
(
ϕ
(1) –
ϕ
(0) )
(brzeg dodatnio zorientowanej krzywej , to 0-wymiarowy łańcuch : punkt p =
ϕ
(1) = 1 brany jest ze znakiem + ,
a punkt p =
ϕ
(0) brany jest ze znakiem - )
Z (4.15) wynika jasno , że dla dowolnego łańcucha :
∂
(- C) = -
∂
C (4.19)
Przykłady.
1) Rozpatrzmy w R2 2-wymiarową osobliwą kostkę C = (
ℑ
2
(+) ,
ϕ
) o parametryzacji
ϕ
: I2
→
R2 :
ϕ
1 (t1, t2 ) = ( r + a t1 ) cos (2
π
t2 ) ,
ϕ
2 (t1, t2 ) = ( r + a t1 ) sin (2
π
t2 ) ,
gdzie : r i a - są stałymi dodatnimi.
Nośnikiem tej osobliwej kostki jest pierścień okręgu :
Sr = { (x, y)
∈
R2 | x2 + y2 = r2 } ; Sr+a = { (x, y)
∈
R2 | x2 + y2 = ( r2 + a2 ) }
Znajdziemy
∂
C. Zgodnie z definicją mamy :
ϕ
( I2
∩
R10 ) = {
ϕ
(0, t2 ) | 0
≤
t2
≤
1 } = Sr .
ϕ
( I2
∩
R11 ) = {
ϕ
(1, t2 ) | 0
≤
t2
≤
1 } = Sr+a .
ϕ
( I2
∩
R20 ) = {
ϕ
(t1 , 0) | 0
≤
t1
≤
1 } =
σ
.
ϕ
( I2
∩
R21 ) = {
ϕ
(t1 , 1) | 0
≤
t1
≤
1 } =
σ
.
gdzie :
σ
- jest odcinkiem łączącym punkty (r , 0) i (r + a , 0). Zatem mamy :
∂
C = Sr+a +
σ
- Sr -
σ
2) Rozpatrzmy w R3 2-wymiarową osobliwą kostkę C = (
ℑ
k
(+) , F ) o parametryzacji :
F : I2
→
R2 :
F1 (t1, t2 ) = R sin (
π
t1 ) cos (2
π
t2 ) ;
F2 (t1, t2 ) =R sin (
π
t1 ) sin (2
π
t2 ) ;
F3 (t1, t2 ) =R cos (
π
t1 ) ;
gdzie : R = const. > 0. Nośnikiem tej osobliwej kostki jest sfera S2R , o promieniu R .
(
θ
=
π
t1 – jest „szerokością“ ,
ϕ
= 2
π
t2 – jest „długością” ) :
S2R = { (x, y, z)
∈
R3 | x2 + y2 + z2 = R2 }
Znajdziemy brzeg tej osobliwej kostki . Zgodnie z definicją mamy :
F( I2
∩
R10 ) = { F(0, t
2 ) | 0
≤
t2
≤
1 } = Ñ.
F( I2
∩
R11 ) = { F(1, t
2 ) | 0
≤
t2
≤
1 } = È.
F( I2
∩
R20 ) = { F(t
1, 0) | 0
≤
t1
≤
1 } = H1R .
F( I2
∩
R21 ) = { F(t
1,1 ) | 0
≤
t1
≤
1 } = H1R .
gdzie : Ñ = (0, 0, R) – jest „biegunem północnym“ sfery, È= (0, 0, R) – jest „biegunem południowym” sfery
H1R – jest pół okręgiem na którym sfera S
2
R przecina półpłaszczyznę Oxy, x
≥
) , tj. :
H1R = { ( x, 0, z )
∈
R3 | x2 + z2 = R2 , x
≥
0 }
Zatem :
∂
S2R = È – Ñ + H
1
R – H
1
R
3) Rozpatrzmy w R2 , 3-wymiarową osobliwą kostkę C = (
ℑ
3
(+) , F ) o parametryzacji :
F : I2
→
R3 ,
F1 (t1, t2 , t3 ) = Rt1 sin (
π
t2 ) cos (2
π
t3 ) ;
F2 (t1, t2 , t3 ) = Rt1 sin (
π
t2 ) sin (2
π
t3 ) ;
F3 (t1, t2 , t3 ) = R t1 cos (
π
t2 ) ;
gdzie R= const. > 0. Nośnikiem tej osobliwej kostki jest oczywiście kula BR o promieniu R ( faktycznie -

73
( r = Rt2 ,
θ
=
π
t2 ,
ϕ
= 2
π
t3 ) – są współrzędnymi sferycznymi ) :
BR = { (x, y, z)
∈
R3 | x2 + y2 + z2 = R2 }
Znajdziemy brzeg tej osobliwej kostki. Zgodnie z definicją :
F( I3
∩
R210 ) = { F(0, t
2, t3) | 0
≤
t2, t3
≤
1 } = O = ( 0, 0, 0 )
F( I3
∩
R211 ) = { F(1, t
2, t3) | 0
≤
t2, t3
≤
1 } = S2R .
F( I3
∩
R220 ) = { F(t
1, 0, t3) | 0
≤
t1, t3
≤
1 } =
σ
N .
F( I3
∩
R221 ) = { F(t
1,1 ,t3) | 0
≤
t1, t3
≤
1 } =
σ
S .
F( I3
∩
R230 ) = { F(t
1, t2, 0) | 0
≤
t1, t2
≤
1 } = KR .
F( I3
∩
R231 ) = { F(t
1, t2, 1) | 0
≤
t1, t3
≤
1 } = KR .
gdzie : S2R = { (x, y, z )
∈
R3 | x2 + y2 + z2 = R2 }- jest sferą o promieniu R tj. granicą topologiczną kuli BR )
σ
N i
σ
S – są odcinkami łączącymi początek współrzędnych O odpowiednio – z północnym i południowym
biegunem sfery S2R , tj. :
σ
N = { (0, 0, Rt ) | 0
≤
t
≤
1 } ,
σ
S = { (0, 0, -Rt ) | 0
≤
t
≤
1 } ,
KR – jest półokręgiem wzdłuż którego kula BR , przecina półpłaszczyznę 0xy , x
≥
0 tj. :
KR = { (x, 0, z )
∈
R3 | x2 + y2
≤
R2 , x
≥
0 }
Zatem :
∂
BR = S
2
R – O +
σ
N -
σ
S + KR - KR . □
Rozpatrzone przykłady mogą niepokoić czytelnika tym, że obliczone granice osobliwych kostek zgodnie ze
wzorem (4.16) nie w pełni zgadzają się z poglądowym obrazem dotyczącym brzegu obszaru otwartego lub
brzegu 2-wymiarowej powierzchni w 3-wymiarowej przestrzeni , a właściwie : w każdym przykładzie brzeg
k-wymiarowej osobliwej kostki C okazuje się być (k-1)-wymiarowym łańcuchem
∂
C, składającym się zarówno
z „naturalnie oczekiwanych” składowych ( składających się na topologiczny brzeg lub kraj ) jak i „zbytecznych”
składowych (w przykładzie 2 wszystkie składowe są „zbyteczne” ponieważ sfera nie posiada brzegu ). Nasze
podstawowe spostrzeżenie dotyczy tego , że „zbyteczne” składowe albo wchodzą do łańcucha parami z
przeciwnym znakiem ( co znaczy , że nie dają żadnego wkładu przy całkowaniu
∂
C danej (k-1)-formy
różniczkowej ), albo są „powierzchniami” mniejszej niż (k-1) liczby zmiennych ( co znaczy ,że – jak zobaczymy
dalej – całka po nich od dowolnej (k-1)-formy różniczkowej jest równa zeru )
W poniższych definicjach sformułujemy pojęcie - „zdegenerowanej” ,k-wymiarowej, osobliwej kostki, tj. takiej
kostki której faktyczny wymiar jest mniejszy niż k.
Definicja. Odwzorowanie gładkie
ϕ
: Ik
→
P ( k
≤
n = dim P ) , nazywamy „regularnym” w punkcie
t = ( t1, ... ,tk )
∈
Ik , jeżeli :
rząd ((d
ϕ
)t = k
i „zdegenerowanym” w punkcie t
∈
Ik , jeżeli :
rząd (d
ϕ
))t < k ■
Przykłady.
1) Odwzorowanie stałe
ϕ
: Ik
→
P .
ϕ
(t) = const. jest zdegenerowane w każdym punkcie t
∈
Ik .
2) Obrazem kwadratu Ik przy odwzorowaniu :
ϕ
: Ik
→
Rk ,
ϕ
(u, v) = ( u cos (2
π
v) , u sin (2
π
v), u ) , u = t1 , v = t2 ,
jest powierzchnia boczna stożka ograniczonego powierzchniami :
x2 + y2 = z2 , z = 0 , z = 1 ,
Obliczenie rzędu macierzy Jakobiego daje wynik :
rząd ( (
∂ϕ
/
∂
u)T , (
∂ϕ
/
∂
v)T ) = rząd ( cos (2
π
v) -2
π
u sin (2
π
v) ) = { 2 jeżeli u
≠
0
( sin (2
π
v) -2
π
u cos (2
π
v) ) { 1 jeżeli u = 0
( 1 0 )
Dlatego
ϕ
jest zdegenerowane tylko w punktach na odcinku { (0, v) | 0
≤
v
≤
1 } , które przechodzą przy tym
odwzorowaniu do wierzchołka stożka. □
74
Twierdzenie 4.1 Niech
ϕ
: Ik
→
P – będzie odwzorowaniem gładkim ( k
≤
n = dim P ) ,
Ω
- k-forma
różniczkowa , określona w pewnym obszarze zbioru
ϕ
(Ik ).
Jeżeli
ϕ
jest zdegenerowane w punkcie t0
∈
Ik , to (
ϕ
*
Ω
)t0 = 0
◄ W istocie :
(
ϕ
*
Ω
)t0 = (
ϕ
*
Ω
)t0 (
∂
/
∂
t1, ... ,
∂
/
∂
tk ) dt1
∧
...
∧
dtk
(
ϕ
*
Ω
)t0 (
∂
/
∂
t1, ... ,
∂
/
∂
tk ) =
Ω
ϕ
(t0) [ (d
ϕ
)t0 (
∂
/
∂
t1) , ... , (d
ϕ
)t0 (
∂
/
∂
tk )]
Ponieważ rząd (d
ϕ
)t0 = dim { (d
ϕ
)t0 (v) | v
∈
Rk } < k , to wektory :
(d
ϕ
)t0 (
∂
/
∂
t1) , ... , (d
ϕ
)t0 (
∂
/
∂
tk )
są liniowo zależne . A ponieważ k-liniowa forma
Ω
ϕ
(t0) jest antysymetryczna , to jej wartość na tym zbiorze
wektorów jest równa zeru. ►
Definicja. Osobliwa k-wymiarowa kostka C = (
ℑ
3
(+) ,
ϕ
: Ik
→
P ) nazywa się „zdegenerowaną” jeżeli jej
parametryzacja
ϕ
jest zdegenerowana w każdym punkcie t
∈
Ik .
Twierdzenie 4.2 Jeżeli k-wymiarowa osobliwa kostka C jest zdegenerowana , to dla dowolnej k-formy
różniczkowej
Ω
( określonej w obszarze nośnika kostki C ) :
∫
Ω
= 0
C
◄ Wynika to bezpośrednio z definicji zdegenerowanej osobliwej kostki i twierdzenia 4.1 ►
Definicja. Dwa k-wymiarowe łańcuchy :
C = { m1 , .. ,mn ; C1, ... , Cn } i S = {
µ
1 , .. ,
µ
p ; S1, ... , Sp }
nazywamy równymi ( C = S ), jeżeli ich zapisy w postaci kombinacji liniowych :
m m
ΣΣΣΣ
miCi i
ΣΣΣΣ
µ
i Si ,
i = 1 i = 1
są zgodne jako liniowe formy „zmiennych” : C1, ... , Cn ; S1, ... , Sp .
( tj. jeśli jeden łańcuch można otrzymać z drugiego drogą „redukcji podobnych członów” ).
Z dokładnością do składowych będących wielokrotnościami zdegenerowanych k-wymiarowych osobliwych
kostek. ■
Tak więc w rozpatrywanych wcześniej przykładach :
brzeg okręgu : Sr+a +
σ
−
Sr
−
σ
= Sr+a
−
Sr .
brzeg kuli : BR : S
2
R
−
O +
σ
N
−
σ
S + KR
−
KR = S
2
R .
(pozostały tylko składowe reprezentujące brzeg topologiczny )
brzeg sfery : S2R : È – Ñ + H
1
R
−
H2R = 0 tj. po wyrugowaniu członów podobnych i odrzuceniu
zdegenerowanych składowych nie zostaje nic ( sfera nie ma brzegu ). Takie łańcuchu , bez brzegu nazywamy
„zerowymi”.
Definicja. Łańcuch o zerowym brzegu nazywamy „cyklem” ■
Jest jasne , że całki względem równych k-wymiarowych łańcuchach jednej i tej samej k-formy są takie same.
Całka po łańcuchu zerowym od dowolnej formy jest równa zeru.

75
4.2 Ogólny całkowy wzór Stokesa
Z wykładu analizy wiadomo o związku między całkowaniem na powierzchni (lub ogólnie: po trójwymiarowym
obszarze ) i całkowaniu po jej brzegu, mówią o tym wzory : Greena , Gaussa-Ostrogradzkiego i Stokesa.
Wszystkie te wyniki są szczególnymi przypadkami jednego eleganckiego wzoru , który obecnie przyjęło się
nazywać „uogólnionym (ogólnym) wzorem Stokesa”. (zobacz dalej wzory (4.20) ).
Wzory te były odkryte i udowodnione przez H. Poincarego ( w pracy pt. : „Nowe metody mechaniki nieba” ,
1899 rok ), uczony ten nazwał swoje wyniki „uogólnieniem twierdzenia Stokesa”.
Twierdzenie 4.2 Niech C – będzie k-wymiarowym łańcuchem w rzeczywistej przestrzeni afinicznej P :
m
C =
ΣΣΣΣ
miCi
i = 1
Ω
- (k-1)-forma różniczkową w przestrzeni P, zdefiniowaną w skrajnym przypadku w pewnym otoczeniu
nośnika łańcucha C. Wtedy :
∫
Ω
=
∫
d
Ω
(4.20)
∂
C C
◄ Dowód rozpoczniemy od tego ,że udowodnimy następujący, szczególny przypadek wzoru (4.20) :
∫
Ω
=
∫
d
Ω
(4.21)
∂
Ik Ik
a następnie sprowadzimy ogólny przypadek do niego. Dla uproszczenia, przez Ik - będziemy oznaczali
osobliwą kostkę o orientacji
ℑ
k
(+) i parametryzacji Id : I
k
→
R k , Id(t) = t.
Niech (x1, ... ,xk ) – będą standardowymi współrzędnymi w R k oraz :
Ω
= ω1dx
2
∧
...
∧
dxk – ω2dx
1
∧
dx3
∧
...
∧
dxk + ... + (-1)k+1 ωkdx
1
∧
...
∧
dxk-1 =
k
ΣΣΣΣ
(-1)i+1 ωidx
1
∧
...
∧
dxi-1
∧
...
∧
dxk . (4.22)
i = 1
Wygodnie jest nam teraz oznaczyć przez (-1)i+1 ωi współczynnik przy : dx
1
∧
...
∧
dxi-1
∧
dxi+1
∧
...
∧
dxk tj. ;
ωi = (-1)i+1
Ω
1 ... (i-1)(i+1)...k = (-1)
i+1
Ω
(
∂
/
∂
x1, ... ,
∂
/
∂
xi-1 ,
∂
/
∂
xi+1, ... ,
∂
/
∂
xk )
Wtedy łatwo podstawić :
k
d
Ω
= (
ΣΣΣΣ
∂
ωi/
∂
xi ) dx1
∧
...
∧
dxk (4.23)
i = 1
Lewa strona równania (4.21) jest równa (zobacz (4.13) i (4.14) ) :
k 1 k 1
∫
Ω
=
ΣΣΣΣ
ΣΣΣΣ
(-1)i+s
∫
Ω
=
ΣΣΣΣ
ΣΣΣΣ
(-1)i+s
∫
ϕ
is*
Ω
∂
Ik Ik
∩
Rk-1is I
k-1
gdzie :
ϕ
is* : I
k-1 - > Ik
∩
Rk-1is - jest parametryzacja brzegu I
k
∩
Rk-1is kostki I
k , zdefiniowana wzorem
(4.12).
Obliczmy (k-1)-formę
ϕ
is*
Ω
. Z pomocą (4.22) znajdujemy :
k
ϕ
is*
Ω
=
ϕ
is* (
ΣΣΣΣ
(-1)m+1 ωmdx
1
∧
...
∧
dxm-1
∧
dxm+1
∧
...
∧
dxk ) =
m = 1
k
=
ΣΣΣΣ
(-1)m-1 ( ωm
°
ϕ
is) (
ϕ
is*dx
1)
∧
...
∧
(
ϕ
is*dx
m-1)
∧
(
ϕ
is*dx
m+1)
∧
...
∧
(
ϕ
is*dx
k) (4.24)
m = 1
ϕ
is*dx
a =
ΣΣΣΣ
(
∂ϕ
a
is/
∂
tb ) dtb, a = 1 ... k
gdzie : t1, ... ,tk-1 – są standardowymi współrzędnymi w Rk-1.

76
Z pomocą (4.12) łatwo jest obliczyć, że :
(
∂ϕ
a
is/
∂
tb ) = {
δ
a
b jeżeli a < i
{ 0 jeżeli a = i
{
δ
a
b+1 jeżeli a > i
dlatego :
k - 1
ϕ
is*dx
a =
ΣΣΣΣ
(
∂ϕ
a
is/
∂
tb ) dtb = { dta jeżeli a < i
b = 1 { 0 jeżeli a = i
{ dta-1 jeżeli a > i
Stąd jasno wynika, że w prawej części (4.24) składowe przy m
≠
i są zerowe (ponieważ każda z takich
składowych zawiera czynnik
ϕ
is*dx
i = 0 ), zatem (4.24) można przepisać następująco :
ϕ
is*
Ω
= (
−
1)i+1 ( ωm
°
ϕ
is) dt
1
∧
...
∧
dxk
−
1 (4.25)
Obliczając lewą stronę (4.21) otrzymamy :
k 1 k 1
∫
Ω
=
ΣΣΣΣ
ΣΣΣΣ
(-1)i+s (-1)i+1
∫
( ωi
°
ϕ
is) dt
1
∧
...
∧
dxk-1 =
ΣΣΣΣ
ΣΣΣΣ
(-1)s+1
∫
( ωi
°
ϕ
is) dt
1
∧
...
∧
dxk-1 =
∂
Ik i=1 s=0 Ik-1 i=1 s=0 Ik-1
k k 1 1
=
ΣΣΣΣ
∫
( ωi
°
ϕ
i1 - ωi
°
ϕ
i0 )dt
1
∧
...
∧
dxk-1 =
ΣΣΣΣ
∫
...
∫
[ ωi (t
1, ... , ti -1, 1, ti,... , tk-1 ) - ω
i (t
1, ... , ti -1, 0,
i=1 Ik-1 0 ... 0
, ti,... , tk-1 ) ] dt1, ... , dti –1.
I dalej, z pomocą wzoru Newtona-Leibnitza , przekształcimy wyrażenie pod całką :
ωi (t1, ... , ti -1, 1, ti,... , tk-1 ) - ωi (t1, ... , ti -1, 0, , ti,... , tk-1 ) =
1
=
∫
[
∂
ωi (t1, ... , ti -1, s, ti,... , tk-1 )/
∂
xi ] ds
0
Wykorzystując tą zależność otrzymamy :
1 ... 1
∫
...
∫
[ ωi (t
1, ... , ti -1, 1, ti,... , tk-1 ) - ω
i (t
1, ... , ti -1, 0, ti,... , tk-1 ) ] dt1, ... , dti –1 =
0 .... 0
1 ... 1
=
∫
...
∫
[
∂
ωi (x1, ... , xk )/
∂
xi ] dx1 ... dxk
0 .... 0
Zatem – ostatecznie otrzymujemy :
k 1 ... 1 1 ... 1 k
∫
Ω
=
ΣΣΣΣ
∫
...
∫
(
∂
ωi/
∂
xi ) dx1 ... dxk =
∫
...
∫
[
ΣΣΣΣ
(
∂
ωi/
∂
xi ) dx1 ... dxk =
∫
[
ΣΣΣΣ
(
∂
ωi/
∂
xi ) dx1
∧
....
∧
dxk =
∂
Ik i=1 0 ... 0 0 ... 0 i=1 Ik i=1
=
∫
d
Ω
. czego właśnie należało dowieść.
Ik
Dowód wzoru (4.20) w ogólnym przypadku sprowadza się teraz do rozpisania odpowiednich zależności.
Dla k-wymiarowej osobliwej kostki C = (
ℑ
k
(+) ,
ϕ
: Ik
→
P ) mamy ( zobacz (4.15) i (4.16) ):
k 1 k 1
∫
Ω
=
ΣΣΣΣ
ΣΣΣΣ
(-1)i+s
∫
Ω
=
ΣΣΣΣ
ΣΣΣΣ
(-1)i+s
∫
(
ϕ
°
ϕ
is )*
Ω
=
∂
C i=1 s=0
ϕ
( Ik
∩
Rk-1is) i=1 s=0 I
k-1

77
k 1 k 1
=
ΣΣΣΣ
ΣΣΣΣ
(-1)i+s
∫
ϕ
is*
ϕ
*
Ω
=
ΣΣΣΣ
ΣΣΣΣ
(-1)i+s
∫
ϕ
*
Ω
=
∫
ϕ
*
Ω
=
∫
d
ϕ
*
Ω
=
∫
ϕ
*d
Ω
=
∫
d
Ω
.
i=1 s=0 Ik-1 i=1 s=0 Ik
∩
Rk-1is
∂
Ik Ik Ik C
Wyjaśnienie. Pierwsza równość - jest to definicja całki po łańcuchu. W drugiej równości wykorzystujemy
definicję całki po osobliwej kostce i fakt , że :
ϕ
°
ϕ
is jest parametryzacją osobliwej kostki
ϕ
( Ik
∩
Rk
−
1
is) .
Trzecia równość jest słuszna na mocy następującej własności operatora anty przeciągnięcia : (
α
°
β
)* =
β
*
°
α
*
Równość czwarta - jest definicją całki po osobliwej kostce Ik
∩
Rk
−
1
is wielkości
ϕ
*
Ω
.
Równość piąta – jest to definicja całki wielkości
ϕ
*
Ω
po łańcuchu
∂
Ik. W równości szóstej wykorzystujemy
własność komutacji operatorów antyprzeciągnięcia i różniczkowania zewnętrznego.
Na koniec – ostatnia równość - jest to definicja całki od d
Ω
po osobliwej kostce C.
Ponieważ obie części równości (4.20) zmieniają znak przy zmianie C na -C , (zobacz (4.8) i (4.19) ) to wzór
(4.20) jest udowodniony również dla przypadku orientacji
ℑ
k
(-) osobliwej kostki C.
Dowód wzoru (4.20) dla łańcucha :
m
C =
ΣΣΣΣ
miCi
i =1
jest teraz trywialny :
m m
∫
Ω
=
ΣΣΣΣ
mi
∫
Ω
=
ΣΣΣΣ
mi
∫
d
Ω
=
∫
d
Ω
►
∂
C i=1
∂
Ci i=1 Ci C
Własno
ść 1. Całka od dokładnej formy różniczkowej po cyklu jest równa zeru :
∫
d
Ω
= 0 jeśli
∂
C =0 (4.26)
C
Własno
ść 2. Całka od zamkniętej formy różniczkowej po brzegu łańcucha jest równa zeru :
∫
Ω
= 0 jeśli d
Ω
=0 (4.27)
∂
C
Przykłady.
1) Rozpatrzmy w zorientowanej przestrzeni E3, na której wprowadzono zorientowane współrzędne kartezjańskie
(x, y, z) 2-formę różniczkową :
Ω
= ( z dx
∧
dy – y dx
∧
dz + x dy
∧
dz ) / (x2 + y2 + z2 )3/2 = A / r3 ,
gdzie : A = z dx
∧
dy – y dx
∧
dz + x dy
∧
dz , r = sqrt (x2 + y2 + z2 )
Zauważmy, że :
Ω
= *( r /r3 ) gdzie : r = x
∂
/
∂
x + y
∂
/
∂
y + z
∂
/
∂
z.
Bezpośrednie podstawienie pokazuje , że forma
Ω
jest zamknięta :
d(r
−
3 ) =
−
3 r -5 ( x dx + y dy + z dz )
dA = 3 dx
∧
dy
∧
dz
d
Ω
= d( (r
−
3 A) = d(r
−
3 )
∧
A + r
−
3 dA = … = 0
Udowodnimy , że mimo to
Ω
nie jest dokładna.
Jeśli by forma
Ω
była dokładna to, na mocy własności 1 twierdzenia 4.2 , całka od niej po dowolnym cyklu
( nośnik którego rozłożony jest w obszarze określoności formy
Ω
tj. w E3 \ {0} ) była by równa zeru. W
charakterze takiego cyklu weźmiemy sferę o promieniu 1 o środku w początku układu współrzędnych :
S1 = { p
∈
E3 | x2(p) + y2(p) + z2 (p) = 1 } =
∂
B1 ,
gdzie :
∂
B1 = { p
∈
E3 | x2(p) + y2(p) + z2 (p)
≤
1 }
( kulę B1 rozpatrujemy jako 3-wymiarową osobliwą kostkę o orientacji
ℑ
3
(+) , zobacz jeden z wcześniejszych
przykładów ).

78
Na początku zauważmy , że całka od formy różniczkowej po osobliwej kostce (łańcuchu) zależy jedynie od
wartości tej formy w punktach nośnika kostki (łańcucha). Jest to oczywiste i wynika z definicji.
Ponieważ
Ω
= A na S1 , to ;
∫
Ω
=
∫
A =
∫
A =
∫
dA = 3
∫
dx
∧
dy
∧
dz = 4
π
S1 S1
∂
B1 B1 B1
Wykorzystaliśmy tutaj wzór (4.20) oraz to ,że ostatnia całka jest równa objętości kuli jednostkowej.
2). Wzory (4.20) częściej wykorzystywane są „z lewa na prawo” tj. aby obliczyć
∫
Ω
, obliczamy
∫
Ω
.
∂
C C
Właśnie w ten sposób postąpiliśmy w ostatnim przykładzie.
Niekiedy wygodnie i celowo jest stosować wzory (4.20) w „odwrotną stronę” tj. aby obliczyć
∫
Q ,
C
gdzie : Q – jest formą dokładną , obliczamy
∫
Ω
, gdzie :
Ω
- jest pewnym potencjałem formy Q.
∂
C
Przykładowo obliczmy całkę od 2-formy różniczkowej Q :
Q = y dz
∧
dx – x dz
∧
dy
po powierzchni S
⊂
R3 , brzeg której
∂
S ma parametryzacje :
γ
: [ 0, 2
π
]
→
R3 .
γ
(t) = ( cos(t) , sin(t), sin(2t) )
Bezpośrednim rachunkiem upewniamy się, że : dQ = 0. Odpowiednio, zatem zgodnie z twierdzeniem Poincarego
, forma Q jest dokładna. Z pomocą opisanego w poprzednim rozdziale algorytmu znajdujemy potencjał Q :
dA = Q , A = 1/3 (yz dx + xz dy –2xy dz )
Bezpośredni rachunek daje nam
γ
*A = 0, dlatego :
∫
Q =
∫
dA =
∫
A =
∫
γ
*A = 0. □
S S
∂
S [ 0, 2
π
]
4.3 Pewne szczególne przypadki ogólnego wzoru Stokesa
4.3.1 Twierdzenie Gaussa o dywergencji.
Niech P – będzie n-wymiarową przestrzenią afiniczną stowarzyszoną z rzeczywistą przestrzenią wektorową V,
Ω
- forma objętości na V ; * : V
→
Λ
n-1 ( V ) – to operator Hodge’a formy objętości
Ω
.
I dalej niech C – będzie n-wymiarowym łańcuchem w P (obszar) , Y – gładkim polem wektorowym ,
określonym w pewnym obszarze nośnika łańcucha C.
Na mocy twierdzenia 4.2 :
∫
d*Y =
∫
*Y
C
∂
C
a ponieważ d*Y = (div Y)
Ω
, to dochodzimy do twierdzenia Gaussa o dywergencji :
∫
(div Y )
Ω
=
∫
*Y (4.28)
C
∂
C
które możemy wypowiedzieć następująco : całka od dywergencji pola wektorowego po obszarze jest równa
strumieniowi tego pola przez brzeg tego obszaru.

79
4.3.2 Pierwszy i drugi wzór Greena
Niech teraz na V będzie zadany tensor metryczny g oraz pewna orientacja i niech
Ω
g – będzie formą objętości .
Podstawiając w (4.28) :
Ω
=
Ω
g i Y = grad f
gdzie : f- jest funkcją gładką , otrzymamy tzw. pierwszą zależność Greena :
∫
∆
f
•
Ω
g =
∫
*grad f (4.29)
Podstawiając w (4.28) kolejno :
Y = u
•
grad v i Y = v
•
grad u.
i wykorzystując tożsamość :
div ( f X ) = f div X + X(f) = f div X + g (grad f, X )
otrzymamy :
∫
u
∆
v
Ω
g +
∫
g (grad u, grad v )
Ω
g =
∫
* ( u grad v ) (4.30)
C C
∂
C
∫
v
∆
u
Ω
g +
∫
g (grad v, grad u )
Ω
g =
∫
* ( v grad u ) (4.31)
C C
∂
C
Odejmując (4.31) od (4.30) dochodzimy do drugiej zależności Greena :
∫
(u
∆
v
−
v
∆
u )
Ω
g =
∫
* ( u grad v
−
v grad u ) (4.32)
C
∂
C
4.3.3 Wzór Gaussa-Ostrogradskiego
Rozpatrzymy przypadek szczególny twierdzenia Gaussa o dywergencji (4.28), kiedy P – jest trójwymiarową ,
zorientowaną przestrzenią Euklidesa , a
Ω
- jest metryczną formą objętości.
Niech (x, y, z ) będą zorientowanymi współrzędnymi kartezjańskimi :
Y = P
∂
/
∂
x + Q
∂
/
∂
y + R
∂
/
∂
z
wtedy :
Ω
= dx
∧
dy
∧
dz
*Y = R dx
∧
dy – Q dx
∧
dz + P dy
∧
dz
div Y =
∂
P/
∂
x +
∂
Q/
∂
y +
∂
R/
∂
z
zatem (4.28) możemy przepisać do postaci :
∫
(
∂
P/
∂
x +
∂
Q/
∂
y +
∂
R/
∂
z ) dx
∧
dy
∧
dz =
∫
R dx
∧
dy – Q dx
∧
dz + P dy
∧
dz (4.33)
C
∂
C
Jest to klasyczny wzór Gaussa-Ostrogradskiego. W bardziej znanej postaci jest on zapisywany następująco :
∫ ∫ ∫
(
∂
P/
∂
x +
∂
Q/
∂
y +
∂
R/
∂
z ) dx dy dz =
∫ ∫
R dx dy – Q dx dz + P dy dz
C
∂
C
(po lewej mamy całkę powierzchniowa II rodzaju )
Przykład. Niech
ρ
- będzie gęstością objętościową ładunku elektrycznego
*) Zobacz zastosowania w rozdziale 3.
rozłożonego w trójwymiarowej przestrzeni Euklidesa E3. Zakładamy, że w E3 ustalona jest pewna orientacja,
przez (x, y, z) oznaczamy zorientowane współrzędne kartezjańskie.
Niech C
⊂
E3 – będzie pewną ograniczoną objętością. Wielkość :
∫
ρ
dx dy dz
nazywa się „ładunkiem objętości C”.
Dwa z czterech równań Maxwella głoszą :
div B = 0 (brak źródeł magnetycznych )
div E = 4
πρ
(prawo Gaussa )
gdzie : E – jest wektorem natężenia pola elektrycznego , B - jest wektorem natężenia pola magnetycznego.
Wykorzystując te dwa równania oraz prawo Gaussa , otrzymujemy :
4
π
∫
ρ
dx
∧
dy
∧
dz =
∫
div E dx
∧
dy
∧
dz =
∫
* E
C C
∂
C

80
tj. strumień pola elektrycznego przez powierzchnię zamkniętą jest proporcjonalny do ładunku objętości C ,
ograniczonego tą powierzchnią.
Dalej mamy :
0 =
∫
div B dx
∧
dy
∧
dz =
∫
* B
C
∂
C
tj. strumień pola magnetycznego przez dowolną powierzchnię zamkniętą jest równy zeru.
W zastosowaniach w rozdziale 3 otrzymaliśmy, jako wniosek z równań Maxwella następującą zależność :
∂ρ
/
∂
t =
−
div J.
gdzie : J – jest wektorem gęstości prądu elektrycznego.
Całkując to równanie po objętości C i wykorzystując twierdzenie Gaussa , otrzymujemy :
∂
/
∂
t
∫
ρ
dx dy dz =
−
∫
div J dx
∧
dy
∧
dz =
−
∫
* J.
C C
∂
C
Wielkość
∫
S * J - nazywamy „całkowitym prądem elektrycznym” przepływającym przez powierzchnię S.
Zatem, prędkość zmiany ładunku objętości jest równa minus całkowitemu prądowi przez powierzchnię ,
ograniczającą objętość. □
4.3.4 Klasyczny wzór Stokesa.
Niech C – będzie 2-wymiarowym łańcuchem w trójwymiarowej , zorientowanej przestrzeni Euklidesa
(„powierzchnia z brzegiem” ), A – polem wektorowym , określonym w pewnym otoczeniu nośnika łańcucha C ,
A – stowarzyszoną z A 1-formą różniczkową.
Wiemy , że pole rotacji pola wektorowego A jest polem dualnym (według Hodge’a ) do 2-formy różniczkowej
dA tj. :
* rot A = dA
gdzie : * - jest operatorem Hodge’a metrycznej formy objętości , przeprowadzającej wektory w 2-formy.
Zgodnie z twierdzeniem 4.2 :
∫
* rot A =
∫
dA =
∫
A
C C
∂
C
zatem dochodzimy do “klasycznego” twierdzenia Stokesa :
∫
* rot A =
∫
A (4.34)
C
∂
C
Twierdzenie to można wypowiedzieć następująco :
strumień rotacji pola wektorowego przez powierzchnię jest równy cyrkulacji tego pola po brzegu powierzchni.
Niech (x, y, z) – będą zorientowanymi współrzędnymi kartezjańskimi :
A = P
∂
/
∂
x + Q
∂
/
∂
y + R
∂
/
∂
z
wtedy :
A = P dx + Q dy + R dz
dA = dP
∧
dx + dQ
∧
dy + dR
∧
dz = (
∂
P/
∂
y) dy
∧
dx + (
∂
P/
∂
z) dz
∧
dx + (
∂
Q/
∂
x) dx
∧
dy +
+ (
∂
Q/
∂
z ) dz
∧
dy + (
∂
R/
∂
x) dx
∧
dz + (
∂
R/
∂
y) dy
∧
dz = [(
∂
Q/
∂
x)
−
(
∂
P/
∂
y )] dx
∧
dy +
+ [(
∂
R/
∂
x)
−
(
∂
P/
∂
z)] dx
∧
dz + [(
∂
R/
∂
y )
−
(
∂
Q/
∂
z )] dy
∧
dz.
A zatem w zapisie współrzędnościowym wzór Stokesa przyjmie następującą postać :
∫
P dx + Q dy + R dz =
∫
[(
∂
Q/
∂
x)
−
(
∂
P/
∂
y)] dx
∧
dy + [(
∂
R/
∂
x)
−
(
∂
P/
∂
z)] dx
∧
dz +
∂
C C
+[(
∂
R/
∂
y)
−
(
∂
Q/
∂
z)] dy
∧
dz (4.35)
lub, jak przyjęto zapisywać na wykładzie analizy :
∫
P dx + Q dy + R dz =
∫
∫
[(
∂
Q/
∂
x)
−
(
∂
P/
∂
y)] dx dy + [(
∂
R/
∂
x)
−
(
∂
P/
∂
z)] dx dz + [(
∂
R/
∂
y)
−
(
∂
Q/
∂
z)] dy dz

81
Uwaga. Nie bacząc na to, że wzór (4.35) jest zapisem we współrzędnych ( kartezjańskich) wzoru (4.34),
otrzymaliśmy (4.35) bezpośrednio z wzoru (4.20), stosując go do 1-formy różniczkowej
Ω
= P
∂
/
∂
x + Q
∂
/
∂
y + R
∂
/
∂
z. Przy tym w żaden sposób nie wykorzystywaliśmy faktu, że współrzędne są
kartezjańskie, ponieważ forma zewnętrzna obliczana jest jednakowo w dowolnych współrzędnych. Z tego
wynika wniosek – wzór (4.35) jest słuszny również w tym przypadku jeśli (x, y, z) – są współrzędnymi
krzywoliniowymi.
Przykład. Dwa z czterech równań Maxwella mają postać :
rot E +
∂
B/
∂
t = 0 (prawo indukcji Faradaya )
rot B -
∂
E/
∂
t = 4
π
J (prawo Ampera )
gdzie : E – jest wektorem natężenia pola elektrycznego , B – jest wektorem natężenia pola magnetycznego.,
J – jest wektorem gęstości prądu elektrycznego.
Niech S
⊂
E3 – będzie dowolną 2-wymiarową powierzchnią z brzegiem
∂
S. Wykorzystując powyższe równania
i twierdzenia Stokesa , otrzymamy
( E i B – są 1-formami różniczkowymi, stowarzyszonymi odpowiednio z
E i B ) :
∫
E =
∫
rot E =
−
∂
/
∂
t
∫
*B.
∂
S S S
tj. krążenie pola elektrycznego po brzegu powierzchni jest równe minus prędkości zmiany strumienia pola przez
tą powierzchnię.
Dalej mamy :
∫
B =
∫
* rot B =
∂
/
∂
t
∫
*E + 4
π
∫
*J.
∂
S S S S
tj. krążenie (cyrkulacja) pola magnetycznego po brzegu powierzchni jest równa prędkości zmiany strumienia
pola elektrycznego przez ta powierzchnię dodać (z dokładnością do stałego czynnika ) całkowity prąd
elektryczny przepływający przez ta powierzchnię. □
4.3.5 Wzór Greena na powierzchni.
Rozpatrzmy na powierzchni (dwuwymiarowej przestrzeni afinicznej) 2-wymiarowy łańcuch C. Niech (x, y) –
będą współrzędnymi afinicznymi, a
Ω
= P dx + Q dy - będzie 1-formą różniczkową na płaszczyźnie.
Bezpośrednie zastosowanie ogólnego wzoru Stokesa (4.20) do
Ω
daje :
∫
P dx + Q dy =
∫
d (P dx + Q dy ) =
∫
dP
∧
dx + dQ
∧
dy =
∫
[(
∂
Q/
∂
x) – (
∂
P/
∂
y)] dx
∧
dy
∂
C C C C
co stanowi klasyczny zapis wzoru Greena :
∫
P dx + Q dy =
∫
[(
∂
Q/
∂
x) – (
∂
P/
∂
y)] dx
∧
dy (4.36)
∂
C C
lub – jak to przyjęto zapisywać na wykładzie analizy :
∫
P dx + Q dy =
∫ ∫
[(
∂
Q/
∂
x) – (
∂
P/
∂
y)] dx dy
∂
C C
Uwaga. Traktowanie (x, y) w (4.36) jako współrzędnych prostoliniowych jest standardem dla wykładu analizy,
jednak jest nie obowiązkowe. W istocie bowiem, przy wyprowadzeniu tego wzoru w żaden sposób nie
wykorzystywaliśmy faktu, iż współrzędne są prostoliniowe, wynika to z tego, że zewnętrzna forma różniczkowa
obliczana jest w sposób jednakowy w dowolnych współrzędnych. Z tego wypływa wniosek – wzór (4.36) jest
słuszny w tym przypadku kiedy (x, y) – są współrzędnymi krzywoliniowymi.

82
4.3.6 Twierdzenie Cauche’go o residuach.
Niech funkcja f zmiennej zespolonej z = x + iy, będzie analityczna w pewnym otoczeniu punktu a
∈
C. Wtedy
jak wiadomo z kursu teorii funkcji zmiennej zespolonej , w dostatecznie małym otoczeniu Ur , punktu a
Ur = { z
∈
C | 0 < | z – a | < r } , funkcje f można przedstawić w postaci szeregu Laurenta :
+
∞
f(z) =
ΣΣΣΣ
cn ( z - a )
n
n =
−∞
Współczynnik c-1 przy ( z - a )
-1 nazywamy residuem funkcji f w punkcie a :
c-1 = Res (f, a)
Dalej rozpatrujemy C jako dwuwymiarową rzeczywistą przestrzeń afiniczną o określonej orientacji zadawanej 2-
formą dx
∧
dy.
Niech
γ
∈
C – będzie zamkniętym, kawałkami gładkim konturem bez samoprzecięć ( w naszej terminologii
ϕ
-
jest 1-wymiarowym łańcuchem w C ). Niech D – będzie ograniczonym i zamkniętym obszarem, brzegiem
którego jest kontur
γ
:
∂
D =
γ
. Przyjmujemy ,że D posiada orientację zgodną z orientacją przestrzeni C, a kontur
γ
posiada orientacje zgodną z orientacją D, tj. przy obejściu
ϕ
w kierunku dodatnim obszar D „pozostaje po
lewej”.
Rozpatrzmy funkcje f – analityczną w pewnej części obszaru D, za wyjątkiem skończonej ilości punktów
wewnętrznych : ( a1 , ... , am ), obszaru D ( punkty osobne funkcji f ).
Otoczymy każdy z punktów ak dostatecznie małym otwartym kołem Bk - o środku w punkcie ak tak ,aby koła te
nie przecinały się wzajemnie i leżały we wnętrzu obszaru D. Oznaczmy przez Sk okrąg będący brzegiem koła
Bk : Sk =
∂
Bk . Przyjmujemy , że orientacja okręgów Sk odpowiada ich obejściu przeciwnie do ruchu
wskazówek zegara tj. przy obejściu Sk w kierunku dodatnim - Bk „pozostaje po lewej”.
m
Funkcja f jest analityczna w obszarze V = D \
∪
Bk . Brzegiem obszaru V jest następujący 1-wymiarowy
k = 1
łańcuch :
∂
V =
γ
−
S1
−
...
−
Sm.
Na mocy twierdzenia 4.2 :
m
∫
d( f (dz ) =
∫
f dz =
∫
f dz
−
ΣΣΣΣ
∫
f dz
V
∂
V
γ
k=1 Sk
Jednak jak widzieliśmy w punkcie 3.1.1 analityczność funkcji f jest równoważna warunkowi d( f dz ) = 0 .
Dlatego :
m
∫
f dz =
ΣΣΣΣ
∫
f dz
γ
k=1 Sk
Obliczymy teraz całkę po prawej stronie ostatniego równania. Ponieważ szereg Laurenta można całkować człon
po członie , to wystarczy obliczyć całkę o postaci :
∫
( z
−
a )n dz , gdzie Kr(a) = { z
∈
C | | z – a | = r } = { a + reit | 0
≤
t
≤
2
π
}
Kr(a)
Jest to łatwe :
∫
( z
−
a )n dz = irn + 1
∫
ei(n +1)t dt = { 2
π
i przy n = -1
Kr(a) { 0 przy n
≠
-1

83
Zatem dochodzimy do twierdzenia Cauche’go o residuach :
m
∫
f dz = 2
π
i
ΣΣΣΣ
Res (f, ar ) (4.37)
γ
k=1
tj. całka po kawałkami gładkim, zamkniętym konturze funkcji analitycznej na tym konturze i w obszarze
obejmującym przez ten kontur – za wyjątkiem skończonej liczby punktów osobnych całkowanej funkcji
znajdujących się wewnątrz konturu całowania, jest równa sumie residuów tej funkcji we wszystkich punktach
osobnych – pomnożonych przez 2
π
i.
4.3.6 Wzór Newtona-Lebniza.
Przy dowodzie ogólnego wzoru Stokesa (4.20) nie rozpatrywaliśmy przypadku k = 1.
Niech C – będzie 1-wymiarową osobliwą kostką w przestrzeni afinicznej P (dowolnego wymiaru) o orientacji
ℑ
1
(+) i parametryzacji : c : [ 1, 0 ]
→
P. Zgodnie z definicją brzegu 1-wymiarowej osobliwej kostki (4.18) :
∂
C = b – a ; gdzie : a = c(0) , b = c(1).
Niech f – będzie funkcją gładką określoną w pewnym otoczeniu zbioru c ([ 0,1 ]). Zapisując ogólny wzór
Stokesa dla 1-formy df i łańcucha C otrzymujemy dobrze znany wzór Newtona-Leibniza :
∫
df =
∫
f = f(b) – f(a) (4.38)
C
∂
C
Przypadek dowolnego 1-wymiarowego łańcucha łatwo sprowadzić do powyższego (co pozostawiamy jako
ćwiczenie).
4.4 Zastosowanie 4. Fizyczna interpretacja div i rot.
4.4.1 Fizyczna interpretacja całki powierzchniowej II rodzaju.
Rozpatrzmy przepływ cieczy w trójwymiarowej zorientowanej przestrzeni Euklidesa E3.
Zakładamy dla uproszczenia , że wszystkie cząstki cieczy poruszają się z jedna prędkością v.
Niech a i b – będą dwoma liniowo niezależnymi wektorami , P – jest równoległobokiem naciągniętym na tych
wektorach. Zorientujemy powierzchnię P przez wybór jednej z dwóch normalnych do tej powierzchni –
wybierzmy normalną postaci :
n = a
×
b /
σ
;
σ
= | a
×
b |
tj. jeśli wektory : a , b , n odłożyć od jednego punktu , to z końca wektora n „widać” dodatnią stronę P.
Obliczmy objętość cieczy przepływającej w jednostce czasu przez powierzchnię P ze jej strony ujemnej na
dodatnią. Zwrot „ze strony ujemnej na dodatnią” oznacza ,że zakładamy objętość za dodatnią, jeżeli ciecz
przepływa zgodnie z kierunkiem wektora n tj. kat między v i n – jest kątem ostrym. Jeżeli kat między v i n -
jest rozwarty to objętość należy brać ze znakiem przeciwnym.
Tak zdefiniowaną wielkość nazywamy – „ objętościowym rozpływem cieczy”.
W jednostce czasu cząstki cieczy, znajdujące się na powierzchni P przemieszczają się o wektor v. W wyniku
czego przez P wypływa ciecz zawarta w równoległoboku o podstawie P i boku v.
Zorientowana objętość tego równoległoboku jest równa :
< v , a
×
b > = < v , n >
σ
Znak tej liczby określony jest znakiem < v , n > , tj. otrzymujemy szukany objętościowy rozpływ.
Jeżeli
ρ
- jest gęstością cieczy ( na razie zakładamy
ρ
= const. ), to wielkość :
ρ
< v , n >
σ
jest równa masie cieczy przepływającej w jednostce czasu przez powierzchnię P ze strony ujemnej na dodatnią
( branej ze znakiem + , jeżeli ciecz płynie w kierunku wektora n , i ze znakiem – w przypadku przeciwnym ).
Wielkość tą nazwiemy „ rozpływem masy cieczy”.
Niech teraz v – będzie polem wektorowym , które interpretujemy jako pole prędkości poruszającej się cieczy :
prędkość chwilowa cząstki cieczy znajdującej się w danej chwili w punkcie p , jest równa vp .
Rozpatrzmy regularną , dwu wymiarową powierzchnię S
⊂
E3 i obliczmy rozpływ objętościowy cieczy
przechodzący przez tą powierzchnię.
Niech r = r(u, v) , (u, v)
∈
D- będzie równaniem parametrycznym powierzchni S , przy czym współrzędne (u, v)
są zorientowane tj. jednostkowy wektor normalny :
n = [(
∂
r/
∂
u)
×
(
∂
r/
∂
v)] / | (
∂
r/
∂
u)
×
(
∂
r/
∂
v)| = [(
∂
r/
∂
u)
×
(
∂
r/
∂
v)] / sqrt ( EG – F2 )

84
E = <
∂
r/
∂
u ,
∂
r/
∂
u > ; F = <
∂
r/
∂
u ,
∂
r/
∂
v > ; G = <
∂
r/
∂
v ,
∂
r/
∂
v >
zadaje orientacje ( jeśli n odłożony jest od punktu na powierzchni S , to z jego końca widzimy dodatnią stronę tej
powierzchni )
Weźmy dowolny punkt p ,na powierzchni S. Rozpływ objętościowy cieczy przepływającej przez „nieskończenie
małe” pole powierzchni dS o środku w punkcie p jest równy :
< vp , np > dS = < vp , np > [ sqrt ( EG – F
2 )] du dv
Zsumowanie wszystkich takich elementarnych rozpływów objętościowych (tj. całkowanie po powierzchni )daje
całkowity rozpływ cieczy przepływającej przez powierzchnię S :
∫
∫
< v , n > dS =
∫
∫
< v , n > sqrt ( EG – F2 ) du dv (4.39)
S D
Tym objaśnia się pochodzenie terminu : „strumień pola wektorowego przez powierzchnię”.
Analogicznie całka :
∫
∫
ρ
< v , n > dS =
∫ ∫
ρ
< v , n > sqrt ( EG – F2 ) du dv (4.40)
S D
równa jest rozpływowi masy cieczy przepływającej przez powierzchnię S. We wzorze tym gęstość cieczy
ρ
nie
musi być już wielkością stałą.
Przykład. (równanie ci
ągłości ). Rozpatrzmy w obszarze przepływu cieczy dowolną objętość U
( o „dostatecznie gładkim brzegu”, tak aby można było stosować twierdzenie Gaussa o dywergencji )
Jeżeli wewnątrz U nie ma źródeł i ścieków to zmiana masy cieczy wewnątrz U zachodzi tylko i wyłącznie za
sprawą przepływu z zewnątrz tj. :
∂
/
∂
t
∫
ρ
dx
∧
dy
∧
dz =
−
∫
*(
ρ
v )
U
∂
U
(
∂
U zorientowana jest przez normalną zewnętrzną, (x, y, z ) – współrzędne kartezjańskie ).
Przekształcając prawą część zgodnie z twierdzeniem Gaussa-Ostrogradskiego , przenosząc wszystko na lewa
stronę i dokonując różniczkowania , otrzymujemy :
∫
[ (
∂ρ
/
∂
t) + div (
ρ
v ) ] dx
∧
dy
∧
dz = 0
U
Ponieważ objętość U jest dowolna , to równanie powyżej jest równoważne następującemu :
∂ρ
/
∂
t + div (
ρ
v ) = 0
Równanie to nazywamy – „równaniem ciągłości“, wyraża ono prawo zachowania masy. □
Rozpatrzona przez nas interpretacja całki powierzchniowej II rodzaju nie jest jedyną możliwa.
Przykładowo, jeżeli pole wektorowe v jest gęstością strumienia ciepła , to całka (4.39) jest równa ilości ciepła
przechodzącemu w jednostce czasu przez powierzchnię S ze strony ujemnej na stronę dodatnią.
4.4.2 Fizyczna interpretacja div.
Rozpatrzmy strumień pola wektorowego v przez powierzchnię zamkniętą S. Jeżeli interpretować v jako pole
prędkości cieczy , to znak strumienia v przez S należy traktować następująco.
Jeżeli całka (4.39) jest dodatnia , to z obszaru U – ograniczającego powierzchnię S – wypływa więcej cieczy niż
do niej wpływa. To świadczy o obecności w obszarze U punktów , w których ciecz jest wytwarzana
( np. topnieje lód ). Takie punkty nazywamy „źródłami”.
Odwrotnie - jeżeli całka (4.39) jest ujemna, to do obszaru U wpływa więcej cieczy niż wypływa.
To świadczy o obecności w obszarze U punktów w których ciecz znika (przykładowo – zamarza ). Takie punkty
nazywamy „ściekami”.
Źródła i ścieki niekiedy nazywa się jednym terminem – źródła , zakładając wydajność „źródła”, za dodatnią a
ścieku za ujemną.
Wydajność jest objętością cieczy pojawiającej się ( lub znikającej )w jednostce czasu ( brana jest ona ze znakiem
+ „dla pojawiania się”, a ze znakiem – dla „znikania” )
Przejdziemy teraz do ścisłej definicji.

85
Niech Up - będzie pewnym ograniczonym otoczeniem (np. kulą ) punktu p Na mocy twierdzenia Gaussa o
dywergencji i twierdzenia o wartości średniej całki wielokrotnej :
div v (p’) vol (Up ) =
∫
*v
div v (p’) = (
∫
*v ) / vol (Up)
∂
Up
∂
Up
Przez : vol (Up ) oznaczamy objętość U . p’
∈
Up – jest pewnym punktem.
Ułamek w prawej części jest średnią wydajnością źródeł w obszarze Up , tj. pojawiająca się w jednostce czasu w
obszarze Up objętość cieczy podzielona przez objętość obszaru Up .
Ściągnijmy teraz obszar Up do punktu p, tj. ściągnijmy do zera średnicę :
diam(Up) = sup { | a – b | | a, b
∈
Up }
Ponieważ przy tej operacji p’
→
p, to otrzymujemy :
div v (p) = lim (
∫
*v ) / vol (Up ) (4.41)
diam(Up )
→
0
∂
Up
Granicę ilorazu pewnej wielkości w otoczeniu Up punktu p do objętości tego otoczenia przy diam(Up )
→
0 ,
jak wiadomo nazywa się (objętościową) gęstością tej wielkości w punkcie p.
Gęstość jako funkcja punktu nazywana jest zwykle „gęstością rozłożenia (rozkładu). Zatem , zależność (4.41)
pozwala interpretować div v jako „gęstość wydajności źródeł” cieczy o polu prędkości v.
Z tej przyczyny pola wektorowe o zerowej dywergencji nazywa się „polami bezźródłowymi”.
Pojęcie źródła (ścieku) i jego wydajności mają różne interpretacje w różnych działach fizyki. Przykładowo , w
przypadku pola wektorowego natężenia elektrycznego rolę źródeł (ścieków) grają dodatnie (ujemne) ładunki , a
ich wydajność określona jest wielkością tych ładunków. Jeżeli pole wektorowe opisuje strumień ciepła to źródła
i ścieki są odpowiednio wydzieleniem ciepła lub jego przyjęciem (np. płyta metalowa oddaje lub przyjmuje
ciepło – przypis własny ), intensywność źródła ciepła jest to ilość ciepła wydzielona (oddana, pochłonięta )w
jednostce czasu.
4.4.3 Twierdzenie o zmianie prędkości objętości w przestrzeni fazowej.
Przypomnijmy, że krzywa gładka c : (a, b )
→
P, w przestrzeni afinicznej P nazywa się „krzywą całkową” pola
wektorowego v
∈Χ
( P ), jeżeli :
∀
t
∈
(a, b) , dc/dt = v(p) (4.42)
We współrzędnych regularnych ( x1 , ... , xn ) na P równanie różniczkowe (4.42) zapisujemy w postaci układu
autonomicznych równań różniczkowych zwyczajnych :
d/dt xi ( c(t) ) = vi ( c(t) ) lub , krócej : dxi / dt = vi ( x1 , ... , xn ) , i = 1 ... n gdzie v = vi
∂
/
∂
xi .
Oznaczmy przez vt „operator przesunięcia wzdłuż krzywej całkowej pola wektorowego v o parametryzowaną
odległość t” , lub jak się jeszcze mówi : „operator strumienia fazowego” pola wektorowego v :
vt (p) = p + t v(p) + o(t) , t - > 0. (4.43)
Innymi słowy , dla każdego ustalonego punktu p, odwzorowanie t |
→
vt (p) jest rozwiązaniem zagadnienia
Cauchy’ego :
d/dt vt (p) = v| vt(p) , v0 (p) = p
Na wykładzie równań różniczkowych zwyczajnych dowodzi się , że dla dowolnego punktu p ( należącego do
obszaru określoności pola v ) znajdziemy takie jego otoczenie U oraz liczbę
ε
> 0 (zależną w ogólności od p ) że
∀
t
∈
(-
ε
,
ε
) odwzorowania vt są określone jednoznacznie i są gładkie na całym zbiorze U.
Przykład. Niech P = Rn , ( x1 , ... , xn ) – są standardowymi prostoliniowymi współrzędnymi w Rn , pole
wektorowe v
∈Χ
( P ) ma postać :
v = ( Aij
•
xj )
∂
/
∂
xi , gdzie : A = Aij – jest stałą macierzą kwadratową, wymiaru n
×
n.
Układ równań różniczkowych , który spełnia warunki krzywych całkowych tego pola – jest układem liniowym o
stałych współczynnikach :
dx/dt = A
•
x , gdzie ( x1 , ... , xn )T
Dlatego operator vt strumienia fazowego pola v działa zgodnie z wzorem :
vt (x) = e
At
•
x , x
∈
Rn . □
Następujące własności odwzorowań vt dowodzi się na wykładzie równań różniczkowych zwyczajnych :

86
v0 = Id tj. v0 (p)
≡
p (4.44)
v-t = vt
-1 (4.45)
vt
°
vs = vt + s (4.46)
( równości te są słuszne dla wszystkich t I s , dla których obie ich strony mają sens )
Naszkicujmy idee dowodu.
◄Jak łatwo sprawdzić , dla dowolnego punktu p obie krzywe t |
→
vt ( vs (p)) i t |
→
vt + s(p) spełniają
równanie (4.42) ( przy ustalonym s ). Na dodatek przy t= 0 przechodzą one przez jeden i ten sam punkt vs
(p).Dlatego własność (4.46) jest udowodniona. własność (4.45) łatwo jest wyprowadzić z (4.46) i (4.44) :
Id = v0 = v-t + t = v-t
°
vt => v-t = vt
-1 ►
Niech w przestrzeni wektorowej stowarzyszonej z przestrzenią afiniczną P – zadana będzie pewna orientacja I
formie objętości
Ω
. Wtedy możemy mówić o objętości vol (D) zbioru mierzalnego D
⊂
P :
vol (D ) =
∫
Ω
D
Rozpatrzmy zbiór mierzalny D
⊂
P w obszarze określoności pola wektorowego v. Przez Dt – oznaczymy obraz
zbioru D przy działaniu na niego operatora przesunięcia wzdłuż krzywych całkowych pola wektorowego v o
parametryzowaną odległość t :
Dt = vt ( D) , D0 D.
Następujące twierdzenie zostało sformułowane przez Liouvilla *) Liouville Joseph ( 1809 – 1882) – matematyk
francuski . Znany z prace dotyczących analizy matematycznej i równań różniczkowych *) :
d/dt |t=t0 vol ( Dt ) =
∫
div v
•Ω
(4.47)
Dt0
◄ Zauważmy przede wszystkim , że (4.47) wystarczy udowodnić przy t0 = 0 :
d/dt |t=0 vol ( Dt ) =
∫
div v
•Ω
(4.48)
D
Na mocy własności (4.46) D
ε
+t0 = v
ε
+t0 (D ) = v
ε
( vt0 (D ) ) = v
ε
(Dt0 ) , i jeżeli (4.48) jest udowodnione , to :
d/dt |t=0 vol ( Dt ) = d/d
ε
|
ε
=0 vol ( D
ε
+t0 ) = d/d
ε
|
ε
=0 vol ( v
ε
(Dt0 ) ) =
∫
div v
•Ω
Dt0
W celu udowodnienia (4.48) musimy przywołać pewne pomocnicze twierdzenie.
Niech będzie dany zbiór nieosobliwych macierzy wymiaru n
×
n { A(t)}t, zależnych w sposób gładki od
parametru liczbowego t. Wtedy dowolną funkcję :
t |
→
a(t) = det A(t)
można obliczyć według wzoru :
da/dt = a
•
tr ( A-1
•
dA/dt ) (4.49)
Udowodnimy teraz (4.49). Rozpatrzmy funkcję :
det : Rn
×
n
→
R , ( A11 , … , A
n
n ) |
→
| A11 … A
1
n |
| ……. ……….|
| An1 … A
n
n |
a następnie obliczmy jej pochodne cząstkowe. Mamy :
n
det A =
ΣΣΣΣ
Aik D
i
k .
k=1
gdzie : Dik – jest dopełnieniem algebraicznym elementu A
i
k ( rozwijamy wyznacznik względem i-tego wiersza )
Ponieważ Dik nie jest zależne od A
i
j , to :
∂
det /
∂
Aij = D
i
j
Zauważmy jeszcze, że jeśli det A
≠
0 , to Dij = ( A
-1
)
i
j
•
det A.

87
Różniczkując funkcję złożoną t |
→
det A(t) względem t , otrzymamy :
n n
d/dt ( det A(t) ) =
ΣΣΣΣ
(
∂
det /
∂
Aij ) (dA
i
j / dt ) =
ΣΣΣΣ
det A ( A-1 )
i
j (dA
i
j / dt ) = det A tr ( A
-1
•
dA/dt ) .
i,j = 1 i,j = 1
co właśnie mamy udowodnić.
Teraz możemy przejść do dowodu (4.48) :
vol ( Dt ) =
∫
Ω
=
∫
Ω
=
∫
vt*
Ω
=> d/dt |t=0 vol ( Dt ) =
∫
d/dt |t=0 vt*
Ω
Dt vt (D) D D
Niech ( x1 , ... , xn ) – będą dowolnymi współrzędnymi afinicznymi w P i
Ω
= ω dx1
∧
...
∧
dxn , (zauważmy, że
ω = const ). Wtedy :
vt*
Ω
= ( det dvt ) ω dx
1
∧
...
∧
dxn = det [ (
∂
vit /
∂
xk )
n
i,k=1] ω dx
1
∧
...
∧
dxn .
gdzie : vit = x
t
°
vt - są funkcjami współrzędnościowymi odwzorowania vt.
Różniczkując współrzędnościowy zapis zależności (4.43) względem współrzędnych , znajdujemy elementy
macierzy Jakobiego : *) Dokładnie (4.43) oznacza , że vt(p) = p + t vp + t
α
(t,p) , gdzie :
α
(t, p)
→
0 przy t
→
0
i przy każdym ustalonym p.
Zakładając v dostatecznie gładkie, możemy zapisać
α
(t, p) = t
β
(t, p), gdzie :
1
β
(t,p) =
∫
(
∂α
/
∂
t) ( t
τ
, p) d
τ
. Wtedy vt(p) = p + t vp + t
2
β
(t,p), i ocena (4.50) jest oczywista *) :
0
∂
vit /
∂
xk =
δ
i
k + t (
∂
vit /
∂
xk ) + o(t) , t
→
0 (4.50)
gdzie : vi - są składowymi pola wektorowego v we współrzędnych ( x
1 , ... , xn ).
Stąd, wykorzystując (4.49) różniczkując, otrzymujemy :
d/dt |t=0 det [ (
∂
vit /
∂
xk )ni,k=1 ] = tr [ (
∂
vi /
∂
xk )ni,k=1] =
∂
vk/
∂
xk = div v.
Zatem :
d/dt |t=0 vt*
Ω
= div v
Ω
►
Interpretacja hydrodynamiczna. jeżeli v – jest polem prędkości cieczy , a cząstki cieczy , wypełniają w chwili
t = 0 zbiór D , a w chwili t zbiór Dt . Jeżeli div v
≡
0, to objętość jednego i tego samego zbioru cząstek cieczy nie
zmienia się z upływem czasu ( chociaż sama figura geometryczna , którą tworzą te cząstki , może się
deformować w czasie ). Ciecz o takiej własności nazywamy – „cieczą nieściśliwą”.
Z tej przyczyny , pola wektorowe o zerowej dywergencji nazywa się „nieściśliwymi”.
4.4.4 Fizyczna interpretacja rot
Rozpatrzmy w trójwymiarowej zorientowanej przestrzeni Euklidesa E3 pole wektorowe B. Jeżeli interpretować
B jako pole siłowe to całka :
t2
∫
B =
∫
B
γ
(t)( d
γ
(t) /dt ) dt
γ
t1
od 1-formy różniczkowej B – stowarzyszonej z B, po gładkiej ( lub kawałkami gładkiej ) drodze
γ
: [ t1, t2 ]
→
E3, wyraża - jak wiadomo – pracę , którą wykonuje B przy przesunięciu punktu materialnego
wzdłuż
γ
- z położenia
γ
(t1) do położenia
γ
(t2). Mówimy o „pracy” nawet wtedy gdy pole wektorowe nie posiada
fizycznego sensu – pola siły.
88
Jeżeli krzywa jest zamknięta , tj.
γ
(t1) =
γ
(t2) , to całka ta nazywa się krążeniem pola wektorowego B po
konturze
γ
.
Niezerowa wartość krążenia pola wektorowego oznacza, że pole to wykonuje pracę przy przemieszczeniu
punktu materialnego przy obejściu konturu całkowania. W tym przypadku mówimy o solenoidalnym charakterze
pola wektorowego.
Niech p –będzie punktem należącym do obszaru w którym określone jest pole B , n – niech będzie wektorem
jednostkowym, Sp – zawierający punkt p, 2-wymiarowy obszar lezący w płaszczyźnie ortogonalnej do
wektora n , i ograniczony zamkniętym kawałkami gładkim konturem
∂
Sp ( przykładowo : Sp – koło o środku w
punkcie p ). Będziemy zakładali, że powierzchnia Sp jest zorientowana przez wektor normalny n.
Na mocy klasycznego twierdzenia Stokesa i twierdzenia o wartości średniej dla całek powierzchniowych :
< rot B, n > (p’ )
•
powierzchnia ( Sp) =
∫
B
< rot B, n > (p’ ) = (
∫
B ) / powierzchnia ( Sp)
Sp
∂
Sp
gdzie : p’
∈
Sp – jest pewnym punktem.
Ściągnijmy teraz powierzchnię Sp do punktu p , tj. przejdźmy do granicy : diam (Sp )
→
0. Ponieważ przy tym
przejściu p’
→
p, to otrzymujemy :
< rot B, n > (p ) = lim (
∫
B ) / powierzchnia ( Sp ) (4.51)
diam (Sp )
→
0.
∂
Sp
Granicę po prawej stronie (4.51) nazywamy zawirowaniem pola wektorowego B w punkcie p w kierunku
wektora n. Zatem – (rot B )p -jest to wektor w kierunku którego zawirowanie pola B w punkcie p jest
maksymalne, przy czym jego długość | (rot B )p | jest równa wartości maksymalnej tego zawirowania.
Przykład. Rozpatrzmy przepływ cieczy w E3 , przy którym wszystkie cząstki cieczy obracają się do okoła
jednej i tej samej osi , z jedną i tą samą prędkością kątową ω = const. ( jeżeli jest to nam wygodne , możemy to
interpretować jako obrót ciała sztywnego do okoła ustalonej osi ze stałą prędkością kątową )
Wtedy - jak wiadomo – z wykładu mechaniki , prędkość liniowa v – cząstek o promieniu wodzącym r , jest
równa :
v =
ω
×
v
( promienie wodzące wszystkich cząstek odkładamy od jednego i tego samego punktu , leżącego na osi obrotu ).
Bezpośredni rachunek we współrzędnych pokazuje , że :
rot v = 2
ω
Obliczenia są trywialne dlatego je opuścimy. Zauważymy jedynie, że najwygodniej jest wykorzystywać
współrzędne walcowe (
ρ
,
ϕ
, z ) o osi Oz zgodnej z osią obrotu , a początek dogodnie jest umieścić w punkcie od
którego odkładamy wektory wodzące cząstek , ponieważ wtedy :
ω ω
∂
/
∂
z , v = ω
∂
/
∂ϕ
, ω = |
ω |
Zatem , rotacja pola wektorowego prędkości jednostajnie obracającej się cieczy - jest równa podwojonej
prędkości kątowej. □
Spis literatury
Pozycje : 11, 14, 17 – są dostępne w polskim przekładzie.
89
Wyszukiwarka
Podobne podstrony:
Kumpiak Analiza wektorowa i tensorowa
elementy analizy wektorowej zadania
calka powierzchniowa III i analiza wektorowa
analiza wektorowa
algebra wektorów i tensorów
Gewert Skoczylas Elementy analizy wektorowej
Elementy analizy wektorowej zadania
Analiza Wektorowa Zadania M Kitlinski
wyklad1 analiza wektorowa1
Elementy analizy wektorowej lista zadań
9 EKG analiza wektorowa id 48037
elementy analizy wektorowej zadania
Elementy analizy wektorowej, 1
analiza wektorowa
Analiza Wektorowa Zadania M Kitlinski
Gewert Skoczylas Elementy analizy wektorowej
więcej podobnych podstron