
Błędy i komparacja dalmierzy
elektromagnetycznych
Stosując w pomiarach odległości dalmierze elektromagnetyczne musimy
uwzględniać wpływy błędów przypadkowych i systematycznych, które
obciążają wyniki tych pomiarów.
Błędy te związane są z samym dalmierzem oraz z wpływem środowiska
na
sygnał pomiarowy.
Wyróżnić można następujące błędy instrumentalne (dalmierza):
• błąd przypadkowy,
• błąd systematyczny niezależny od odległości,
• błąd systematyczny zależny liniowo od odległości,
• błąd systematyczny zależny nieliniowo od odległości,
• błąd cykliczny,
• błąd zależny od temperatury,
• błąd zależny od czasu,
• błąd zależny od napięcia zasilania.
Komparacja dalmierzy elektromagnetycznych

Błędy przypadkowe i systematyczne nie związane z instrumentem:
• błędy centrowania instrumentu i reflektora nad lub pod znakami
pomiarowymi,
• błąd poziomowania dalmierza i lustra,
• błąd wycelowania:
a) dalmierza na lustro,
b) lustra w kierunku dalmierza,
• błąd popełniany przy pomiarach nasadką dalmierczą,
• błąd pomiaru temperatury, ciśnienia i wilgotności na drodze sygnału
pomiarowego ,
• błąd pomiaru lub zaniechania wprowadzenia którejś z poprawek do
długości,
• błędy wynikające z odbicia sygnałów pomiarowych od obiektów
będących w tle reflektora,
• błędy wywołane turbulencją atmosferyczną,
• błąd zależny od czasu pomiaru i związany z różną ilością pomiarów
przejść fazowych.
Celem komparacji
jest wyznaczenie
błędów systematycznych
pochodzenia
instrumentalnego,
które mogą być wyeliminowane
z
pomiarów poprzez wprowadzenie do nich poprawek wyznaczonych
właśnie w procesie komparacji – stosując specjalną procedurę
pomiarową.
W praktyce wyznacza się
trzy rodzaje poprawek
.
1.
Poprawkę stałej dodawania k.
2.
Poprawkę ze względu na zmianę częstotliwości wzorcowej od jej
wartości nominalnej.
3.
Poprawkę ze względu na błąd cykliczny, która może występować
tylko w dalmierzach fazowych.
1.
Poprawka stałej dodawania k
Ogólny wzór na obliczenie odległości pomierzonej dalmierzem wygląda
następująco:
Stała
k
łączy ze sobą wpływ różnicy między centrem mechanicznym
dalmierza, a jego centrem elektronicznym.
Najczęściej wartość stałej
k
wyznacza
się na krótkim odcinku poprzez
porównanie odległości pomierzonej
D
i
długości wyznaczonej inną
metodą
D
0
zazwyczaj o
rząd dokładniejszą (jest to
metoda
porównawcza
).
Odcinek, na
którym wykonywane są pomiary powinien mieć około
5 - 10
metrów. Wartość stałej dodawania obliczamy wówczas ze wzoru:
Pewniejszym sposobem wyznaczenia
stałej
k
jest pomiar
odległości
2 - 3
odcinków o długościach różniących się o 1 - 2 metry. Najlepiej, jeżeli
są to np. odcinki odpowiednio o długościach 10, 12 i 15 metrów.
k = D
0
- D
k
D
2
1
Jeżeli nie znamy długości odcinka z dokładnością o rząd wyższą możemy
zastosować inną metodę wyznaczania stałej
k
(
metodę różnicową
).
Polega ona na pomiarze
długości odcinka
A
, na
który wtycza się
dodatkowo punkt
C
.
Sposób wykonania bazy pomiarowej
Mierzymy w
dwóch kierunkach odcinki
AC, CB i AB
.
Możemy wówczas
zapisać prostą zależność łączącą wyniki pomiarów i stałą
k
dalmierza:
(AC + k) + ( CB + k) = AB + k
Z czego po uproszczeniu otrzymujemy
wzór na stałą dodawania
k
:
k = AB - (AC + CB)
A
B
C

2.
Błąd zmiany częstotliwości
Pod
wpływem różnych czynników, głównie jednak na skutek starzenia się
kwarcu,
częstotliwość wzorcowa dalmierza ulega zmianie. Powoduje to
zmianę skali mierzonych nim długości. Można zapisać to następująco:
, gdzie:
f = f
wn
- f
wp
- zmiana
częstotliwości wzorcowej,
f
wn
-
częstotliwość wzorcowa nominalna (znana jest z metryki dalmierza),
f
wp
-
częstotliwość wzorcowa w czasie pomiaru.
W procesie komparacji chodzi zatem o wyznaczenie
wartości
f
.
Wykonuje
się to poprzez porównanie aktualnej częstotliwości wzorcowej
f
wp
dalmierza z
częstotliwością wytwarzaną przez odpowiedni generator.
Tego rodzaju
bezpośredni pomiar wykonuje się w laboratoriach
odpowiednich instytucji.
Komparację częstotliwości można realizować
także w warunkach polowych przez porównanie aktualnej jej wartości
z tzw. krajowym wzorcem
częstotliwości fal radiowych emitowanych
regularnie przez
niektóre radiostacje.
f
f
D
D
D
D
f
f
, gdzie:
f = f
wn
- f
wp
- zmiana
częstotliwości wzorcowej,
f
wn
-
częstotliwość wzorcowa nominalna (znana jest z metryki dalmierza),
f
wp
-
częstotliwość wzorcowa w czasie pomiaru.
Można skontrolować na bazie o długości
D
- znanej z
dużą dokładnością
(pod warunkiem
wcześniejszego wprowadzenia/uwzględnienia wszystkich
innych poprawek).
6
wn
10
f
f
k
s
Współczynnik zmiany skali k
s
mierzonych
długości spowodowany zmianą
częstotliwości wzorcowej (wyrażony w ppm) można obliczyć ze wzoru:
]
[
]
[
km
mm
D
D
k
s
3. Wyznaczenie
błędu cyklicznego
Błąd cykliczny wynika z tzw. sprzężeń pasożytniczych występujących
między częścią nadawczą a częścią odbiorczą dalmierza. Na sygnał
powracający nałożony jest niejako sygnał zakłócający o tej samej
częstotliwości. Błąd cykliczny pojawia się także w elektrycznym
przesuwniku fazy.
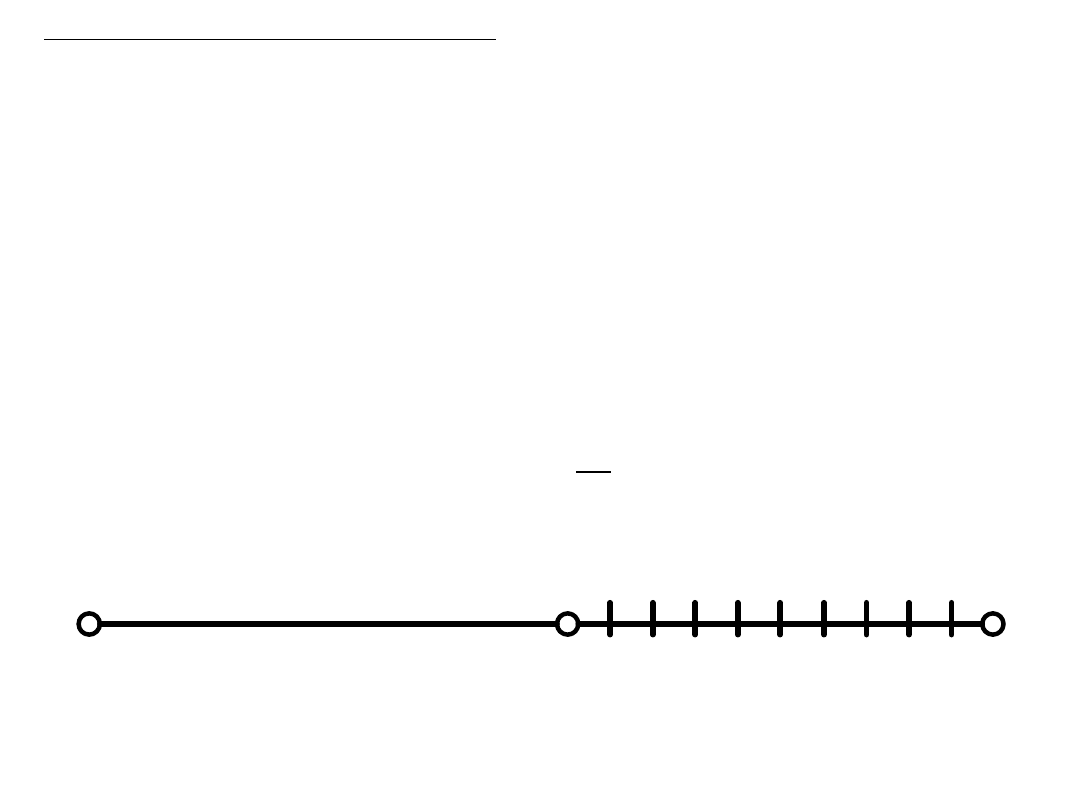
Wartość błędu cyklicznego określamy w następujący sposób.
Tworzymy
bazę AB, na którą wtyczamy punkt C. Odcinek CB powinien
być równy lub trochę dłuższy od połowy długości „przymiaru”
podstawowego dalmierza
/
2
.
(od 0,6 m do 40 m)
)
(
2
R
N
D
A
C
B
Odcinek CB
należy podzielić na dziesięć równych części, których długość
równa jest
/2/10
– jedna dziesiąta połowy długości fali.
Pomiary na tej bazie wykonujemy tylko na podstawowej
częstotliwości
wzorcowej (w punkcie A ustawiamy dalmierz a kolejno w punktach od
C do B reflektor).
Obliczamy
odchyłki d
i
długości pomierzonych od ich nominalnych
wartości (określonych z o rząd większą dokładnością). Najpierw
obliczamy
odchyłkę średnią - d
śr
i
poszczególne różnice od tej średniej -
wartości c
i
.
Jeżeli odchyłki d
i
dla wszystkich
długości są podobne to wartość ta jest
stałą dodawania k dalmierza a błąd cykliczny nie występuje.
A
C
B
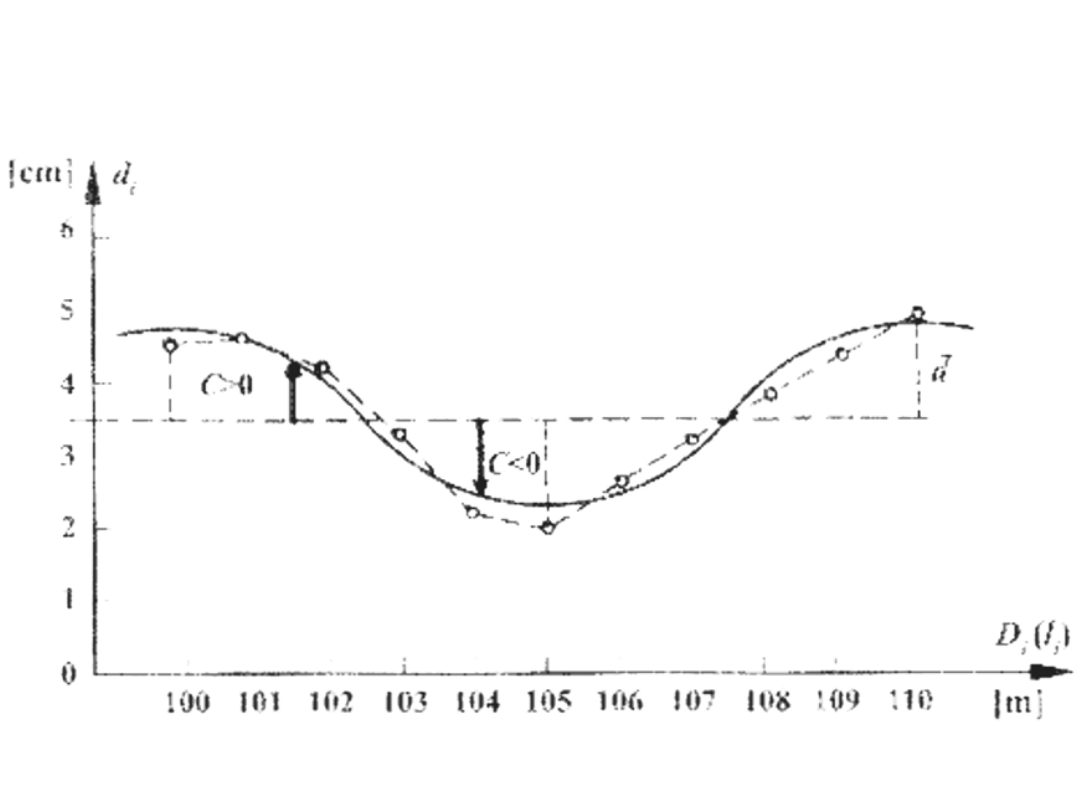
Wówczas, gdy odchyłki są różne rysujemy wykres, na którym
przedstawiamy zmiany (
c
i
to
różnice w cm lub mm od wartości średniej –
d
śr
).
Przykład takiego wykresu znajduje się na rysunku poniżej.
Służy on do określania poprawek dla różnych długości z tytułu błędu
cyklicznego.
d
śr

Obowiązujące przepisy nakładają na użytkowników dalmierzy obowiązek
ich okresowej kontroli.
W jej wyniku dalmierz uzyskuje tzw.
metrykę.
Do wykonywania kontroli,
którą nazywamy komparacją dalmierza zostały
upoważnione w Polsce Instytut Geodezji i Kartografii w Warszawie oraz
kilka instytucji,
które założyły i utrzymują tzw. komparatory polowe.
Komparatory polowe
są to zbiory punktów zastabilizowanych w terenie
w linii prostej w postaci
postumentów betonowych, których trzon
osadzony jest
poniżej poziomu zamarzania gruntu.
Długości baz takich komparatorów osiągają 1,5 kilometra, a długości
odcinków zawarte w tym zakresie wahają się od kilku do kilkunastu
metrów.
Odcinki
komparatorów są wyznaczane i znane z dokładnością o rząd
większą niż posiadają badane na nich instrumenty.
PN ISO 17123-4: Optyka i instrumenty optyczne. Terenowe procedury do
badania
instrumentów geodezyjnych i pomiarowych. Część 4: Dalmierze
elektrooptyczne (instrumenty EDM).

Literatura
Holejko K., Precyzyjne elektroniczne pomiary
odległości i kątów, WNT, Warszawa 1981.
Płatek A., Geodezyjne dalmierze elektromagnetyczne i tachymetry elektroniczne, część I, Geodezyjne
dalmierze elektromagnetyczne do
pomiarów terenowych, PPWK, Warszawa – Wrocław 1991.
Płatek A., Elektroniczna technika pomiarowa w geodezji, Wyd. AGH, Kraków 1995.
Tatarczyk J., Elementy optyki instrumentalnej i fizjologicznej, Wyd. AGH,
Kraków 1984.
Wanic A., Instrumentoznawstwo geodezyjne i elementy technik pomiarowych, Wyd. UWM, Olsztyn 2007.
PN ISO 17123-4:2005 Optyka i instrumenty optyczne. Terenowe procedury do badania
instrumentów
geodezyjnych i pomiarowych.
Część 4: Dalmierze elektrooptyczne (instrumenty EDM).
www.zasoby1.open.agh.edu.pl/dydaktyka/automatyka/c_elektroniczna_techn_pomiarowa/w14.htm
(dostęp dn. 10.10.2010)

Funkcjonowanie
wybranych modułów
operacyjnych
dalmierzy
Generator częstotliwości wzorcowej
Powinien
zapewniać
wysoki
stopień
stabilności
wytwarzanej
częstotliwości wzorcowej.
Względna niestabilność częstotliwości wzorcowej może być wyrażona
wielkością zmiany generowanej częstotliwości wzorcowej do jej
nominalnej
wartości i dla fazowych dalmierzy elektrooptycznych jest
dopuszczalna w przedziale 1*10
-6
÷ 1*10
-7
.
Zmiana
częstotliwości wzorcowej generatora wynika m.in. ze zmian
czynników termicznych, pojemnościowych lub zmian napięć zasilających.
Starzenie
się elementów elektronicznych również wpływa na zmianę
parametrów obwodu rezonansowego generatora.
W celu stabilizacji
częstotliwości generatora stosuje się stabilizatory
napięcia, termostaty, a także zabezpiecza się elementy składowe
generatorów przed udarami mechanicznymi mogącymi zmienić parametry
nominalne obwodu rezonansowego.
Najważniejszym jednak zabiegiem
zapewniającym stałość generowanych drgań jest zastosowanie
stabilizacji
kwarcowej,
polegającej
na
włączeniu
do
obwodu
rezonansowego generatora
częstotliwości wzorcowej - rezonatora
kwarcowego.

Rezonatorem kwarcowym jest odpowiednio
wycięta i wyposażona
w elektrody
płytka z kryształu kwarcu (SiO
2
), w
którym występuje zjawisko
piezoelektryczne
polegające na przetwarzaniu energii elektrycznej
w
mechaniczną i odwrotnie.
Po pobudzeniu
płytki kwarcu napięciem przemiennym doprowadzonym za
pomocą odpowiednich elektrod, powstają w niej drgania mechaniczne
(deformacje
sprężyste płytki kwarcu), których amplituda jest największa,
gdy
częstotliwość przemiennego napięcia pobudzającego jest równa
częstotliwości rezonansu mechanicznego płytki kwarcowej.
Maksymalna amplituda
drgań występuje wówczas, gdy częstotliwość
drgań
obwodu
elektrycznego
jest
równa
częstotliwości
rezonansu mechanicznego
płytki kwarcowej.
W ten
sposób drgania własne kwarcu sterują drganiami obwodu
elektrycznego generatora
wytwarzającego częstotliwość wzorcową.
Uzyskiwane
częstotliwości rezonansowe wynoszą od kilku kiloherców do
kilkudziesięciu megaherców.
Stosuje
się powszechnie generatory kwarcowe z termokompensacją.
Częstotliwość drgań własnych kwarcu nie jest stała. Zmiany w tym
zakresie
są spowodowane starzeniem się kwarcu i mogą zachodzić
w
sposób ciągły lub skokowy.
Źródła światła
Źródłami światła w dalmierzach elektrooptycznych dużego zasięgu
(kilkadziesiąt kilometrów) są lasery helowo-neonowe (Ne-He) o mocy
wyjściowej nieprzekraczającej 5 mW.
Lasery tego typu
są źródłem ciągłego promieniowania spójnego
i monochromatycznego
najczęściej o długości fali 632.8 nm.
Emitowana przez laser
wiązka świetlna może być skupiona przez układ
nadawczy dalmierza,
dzięki czemu otrzymujemy wiązkę o małym kącie
rozbieżności.
W dalmierzach
krótkiego zasięgu (do kilku kilometrów) jako źródło
światła stosuje się diody luminescencyjne wykonane z arsenku galu
(GaAs).
Cechą charakterystyczną diod luminescencyjnych oraz laserów
półprzewodnikowych jest nierównomierność fazy występująca na
powierzchni
emitującej złącza.
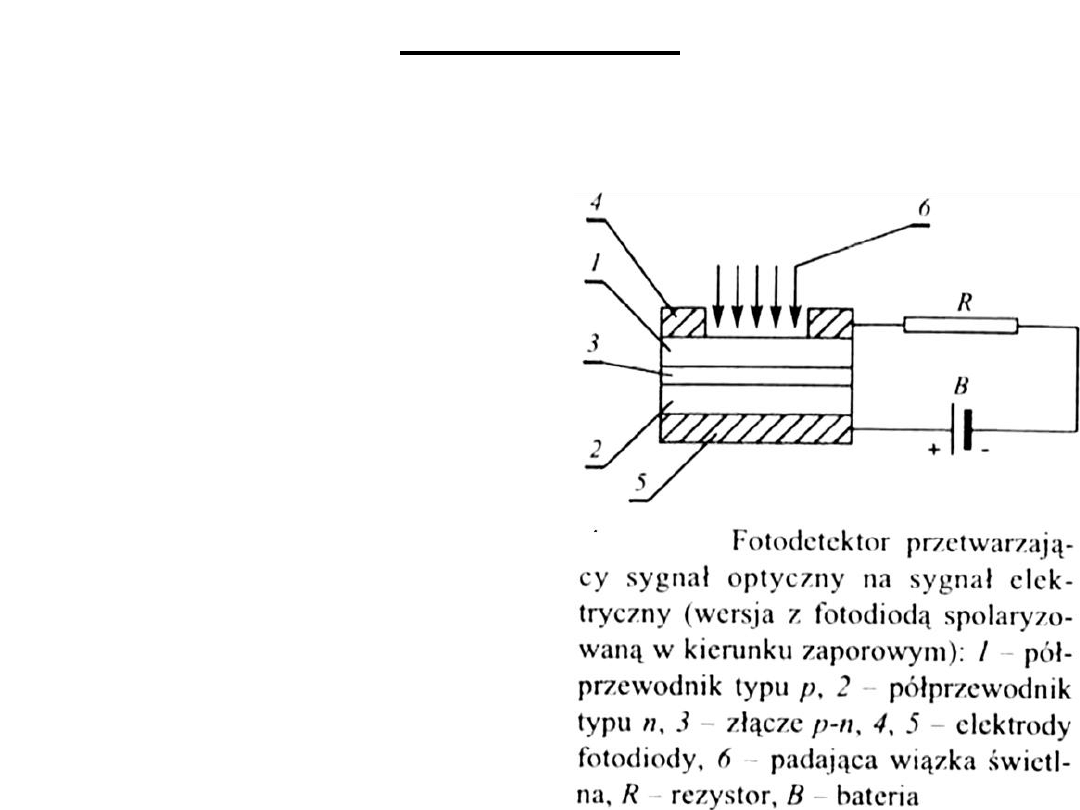
Fotodetektory
W dalmierzu elektronicznym zadaniem fotodetektora jest przetworzenie
optycznego
sygnału pomiarowego na sygnał elektryczny.
Dawniej
jako
fotodetektory
były
stosowane fotopowielacze, w
których
prąd fotoelektryczny o zmodulowanej
amplitudzie w procesie fotoemisji, jest
jednocześnie wzmacniany. Obecnie
jako fotodetektory wykorzystuje
się
elementy
półprzewodnikowe,
jak
fotodiody i diody lawinowe.
Ważnymi zaletami fotodiod są przede
wszystkim ich
małe wymiary, praca
z niskim
napięciem zasilania, a także
możliwość
detekcji
sygnałów
świetlnych przy bardzo wysokich
częstotliwościach modulacji.
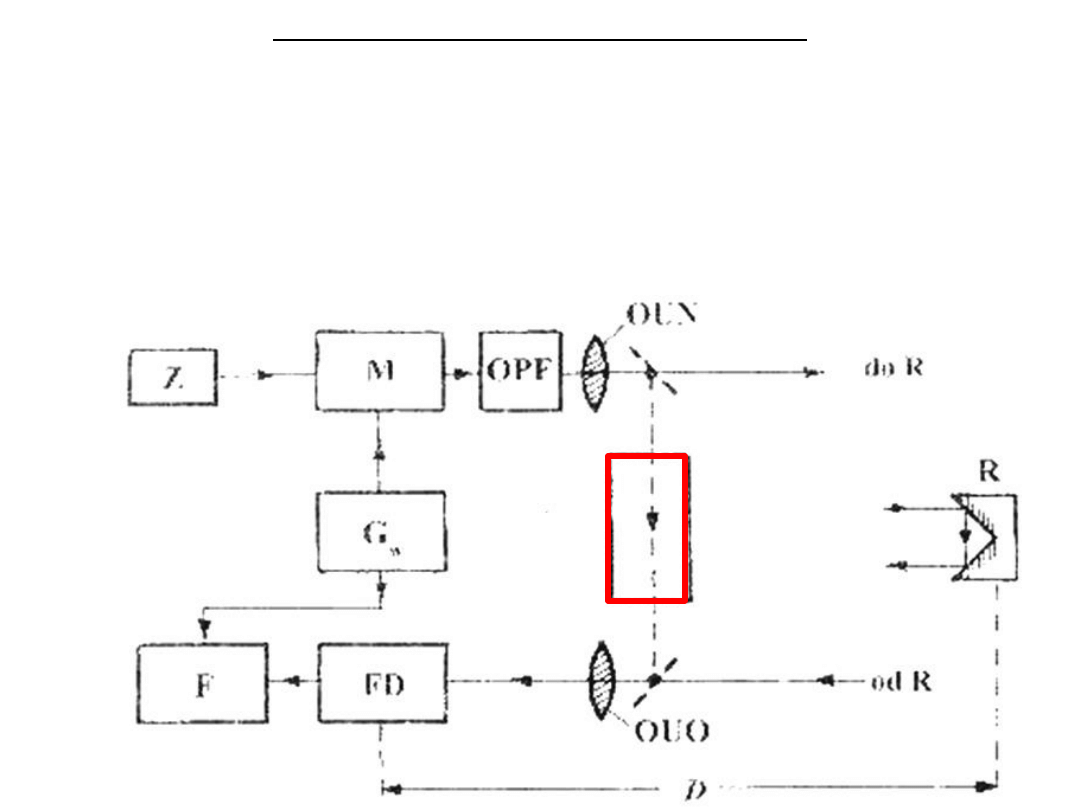
Wewnętrzna linia optyczna
W dalmierzach elektromagnetycznych tory
sygnałów elektrycznych fal
pomiarowych
doznają dodatkowych przesunięć na elementach
elektronicznych samego dalmierza. W celu wyeliminowania tych
przesunięć, które wprowadzają do pomiarów odległości błędy, dokonuje
się dodatkowego pomiaru różnicy faz na znanej drodze wewnętrznej
w
układzie nazywanym
linią skalowania
(LS)
lub
wewnętrzną linią
optyczną
.
LS

Aby do
wyników pomiarów na zewnętrznej linii optycznej można było
uwzględniać dawać właściwą poprawkę to w trakcie pomiarów LS i D
(odległość zewnętrzna) muszą być najpierw zrównane amplitudy tych
obydwu
sygnałów. Przy małych odległościach D, kiedy sygnał zewnętrzny
jest silniejszy, poziom jego
natężenia jest regulowany do poziomu
z obiegu
wewnętrznego przez tłumienie na torze wewnętrznym. Przy
dużych odległościach sygnał z zewnątrz jest słabszy, regulowany jest
więc poziom natężenia sygnału na linii LS.
Obecnie - w nowoczesnych dalmierzach -
zrównywanie amplitud
wykonywane jest automatycznie. Mikroprocesor blokuje a
następnie
włącza system pomiarowy po otrzymaniu informacji o wyrównaniu tych
amplitud.
Proces pomiarowy tej
długości LS jest wykonywany zawsze przez
dalmierz i nie
może być ona ustalona jako stała dodawania, gdyż zmienia
się w czasie i zależy od temperatury urządzenia.
Zmiana obiegu
sygnału pomiarowego z wewnętrznego na zewnętrzny i na
odwrót odbywa się za pomocą przełącznika zmieniającego położenie
zwierciadeł, który uruchamiany jest automatycznie przez sygnał
z mikroprocesora
sterującego pomiarem. Przełączania te muszą być
wykonywane szybko
(poniżej 1s) ze względu na zmiany czasowe samej
LS.
Specjalne tryby pracy fazomierza
- chwilowe
przesłonięcie sygnału pomiarowego
Z
chwilą pojawienia się na celowej przeszkody następuje przerwa
sygnału, do dalmierza nie trafia promień odbity, co w efekcie powoduje
przerwanie pomiaru
różnicy faz.
W nowoczesnych dalmierzach fakt ten
uwzględnia się wyposażając
fazomierz w tzw. blokowy
układ zaniku, który wstrzymuje prace
fazomierza. Po
odsłonięciu celowej układ blokady włącza fazomierz, który
kontynuuje przerwany pomiar.
Nawet wielokrotne
przesłonięcie celowej nie mają wpływu na wyniki,
„cząstkowe” pomiary nie są utracone, są one przechowywane w pamięci
mikroprocesora.
Zablokowanie pracy fazomierza
następuje także przy pomiarze odległości
przy bardzo
słabym sygnale, którego amplituda zmienia się w czasie.
Zasięg dalmierza uzależniony jest od występowania i natężenia światła
słonecznego. Fala nośna dalmierza elektrooptycznego jest podczerwona
i jest
zakłócana przez słońce. W nocy zasięg dalmierza będzie
zdecydowanie
większy.
- system tracking
Jest to system
umożliwiający pomiar odległości do reflektora w ruchu.
Określana jest wtedy chwilowa odległość z niewielkiej ilości przebiegów
fazowych w
ciągu krótkiego regularnie powtarzanego interwału czasu Ts.
Dokładność takich pomiarów jest przeważnie o rząd mniejsza od
pomiarów przy nieruchomym reflektorze.
System ten jest wykorzystywany do zgrubnego tyczenia
punktów
w terenie albo przy pozycjonowaniu
przemieszczających się obiektów.

Sterowanie pracą dalmierza przez procesor
Do
najważniejszych funkcji mikroprocesora w dalmierzu należą:
• kontrola gotowości dalmierza do pomiaru (sprawdzanie parametrów
zasilania,
wewnętrzne testowanie),
• włączanie kolejnych częstotliwości wzorcowych w celu rozwiązania
niejednoznaczności pomiaru (obliczanie N),
• przełączanie obiegów wewnętrznych i zewnętrznych oraz zrównywanie
amplitud na tych obiegach,
• sterowanie układem blokady zaniku,
• sterowanie pomiarem w trybie tracking,
• sterowanie pracą fazomierza – realizowanie zaprogramowanego trybu
pomiaru.

Oprócz wymienionych wcześniej funkcji mikroprocesorów związanych
z pomiarem
spełniają one także wiele funkcji dodatkowych. Polegają one
na wprowadzaniu do mierzonej
odległości poprawek oraz obliczeń
redukcyjnych i innych.
Do tych funkcji
można zaliczyć (funkcje nie związane z samym
pomiarem):
• uwzględnienie poprawki dodawania,
• uwzględnienie wartości współczynnika załamania (wpływ temperatury,
wilgotności i ciśnienia),
• obliczenie poprawki na odwzorowanie,
• obliczenie długości zredukowanej na poziom lub różnicy wysokości na
podstawie wprowadzonego
kąta pionowego.
Wiele
współczesnych dalmierzy ma rozbudowane oprogramowanie
umożliwiające obliczanie współrzędnych stanowiska tachimetru lub
współrzędnych punktów celu oraz wektorów, które łączą te punkty.
Tendencje w rozwoju konstrukcji dalmierzy
Aktualne tendencje
polegają na wykorzystaniu najnowszych produktów
elektroniki tj.
włączenie ich do poszczególnych bloków konstrukcyjnych
dalmierza.
Uzyskuje
się przez to zmniejszenie ciężaru i gabarytów, chociaż w tym
zakresie
osiągnięto już raczej optimum i niewiele w najbliższej przyszłości
należy oczekiwać.

Literatura
Holejko K., Precyzyjne elektroniczne pomiary
odległości i kątów, WNT, Warszawa 1987.
Płatek A., Geodezyjne dalmierze elektromagnetyczne i tachymetry elektroniczne, część I, Geodezyjne
dalmierze elektromagnetyczne do
pomiarów terenowych, PPWK, Warszawa – Wrocław 1991.
Płatek A., Elektroniczna technika pomiarowa w geodezji, Wyd. AGH, Kraków 1995.
Tatarczyk J., Elementy optyki instrumentalnej i fizjologicznej, Wyd. AGH,
Kraków 1984.
Wanic A., Instrumentoznawstwo geodezyjne i elementy technik pomiarowych, Wyd. UWM, Olsztyn 2007.
PN ISO 17123-4:2005 Optyka i instrumenty optyczne. Terenowe procedury do badania
instrumentów
geodezyjnych i pomiarowych.
Część 4: Dalmierze elektrooptyczne (instrumenty EDM).
www.zasoby1.open.agh.edu.pl/dydaktyka/automatyka/c_elektroniczna_techn_pomiarowa/w15.htm
(dostęp dn. 10.10.2010)
Wyszukiwarka
Podobne podstrony:
Rachunkowość - wykłady - 11, Błędy księgowe muszą być poprawione, tak aby nie została naruszona moc
ETP wyklad 10 dalmierze elektromagnetyczne dokladnosc pomiaru dalmierzami wplyw warunkow meteorologi
Wyklad 11 Dekalog funkcje umysłu
wyklad 11
WYKŁAD 11 SPS 2 regulatory 0
wyklad 11 toksyczno niemetali
BUD OG wykład 11 3 Geosyntetyki
Psychometria 2009, Wykład 11, Inwentarz MMPI
BUD OG wykład 11 1 Tworzywa sztuczne
Wyklad 11 2010
Wyklad 2 11
F II wyklad 11 30 04 12
ETP wyklad 5 optyka w instrumentach geodezyjnych
chem wykład 11
Chemia fizyczna wykład 11
więcej podobnych podstron