Mechanika Budowli I
Wykład 1
ZASADA PRAC WIRTUALNYCH
Dr in
ż
. Urszula PAWLAK
POLITECHNIKA
Ś
WI
Ę
TOKRZYSKA
WYDZIAŁ BUDOWNICTWA I ARCHITEKTURY
ZAKŁAD MECHANIKI BUDOWLI
KIELCE 2013
email: zmbul@tu.kielce.pl
ZAKŁAD MECHANIKI BUDOWLI
WYDZIAŁ BUDOWNICTWA I ARCHITEKTURY
ZAKŁAD MECHANIKI BUDOWLI
POLITECHNIKA
Ś
WI
Ę
TOKRZYSKA
WYDZIAŁ BUDOWNICTWA I ARCHITEKTURY
ZAKŁAD MECHANIKI BUDOWLI
POLITECHNIKA
Ś
WI
Ę
TOKRZYSKA
WYDZIAŁ BUDOWNICTWA I ARCHITEKTURY
ZAKŁAD MECHANIKI BUDOWLI
POLITECHNIKA
Ś
WI
Ę
TOKRZYSKA
WYDZIAŁ BUDOWNICTWA I ARCHITEKTURY
ZAKŁAD MECHANIKI BUDOWLI
2
PODSTAWOWE ZAŁO
Ż
ENIA MECHANIKI BUDOWLI
Zało
ż
enie jednorodno
ś
ci i izotropii materiału
Zało
ż
enie statyczno
ś
ci obci
ąż
e
ń
Zało
ż
enie małych przemieszcze
ń
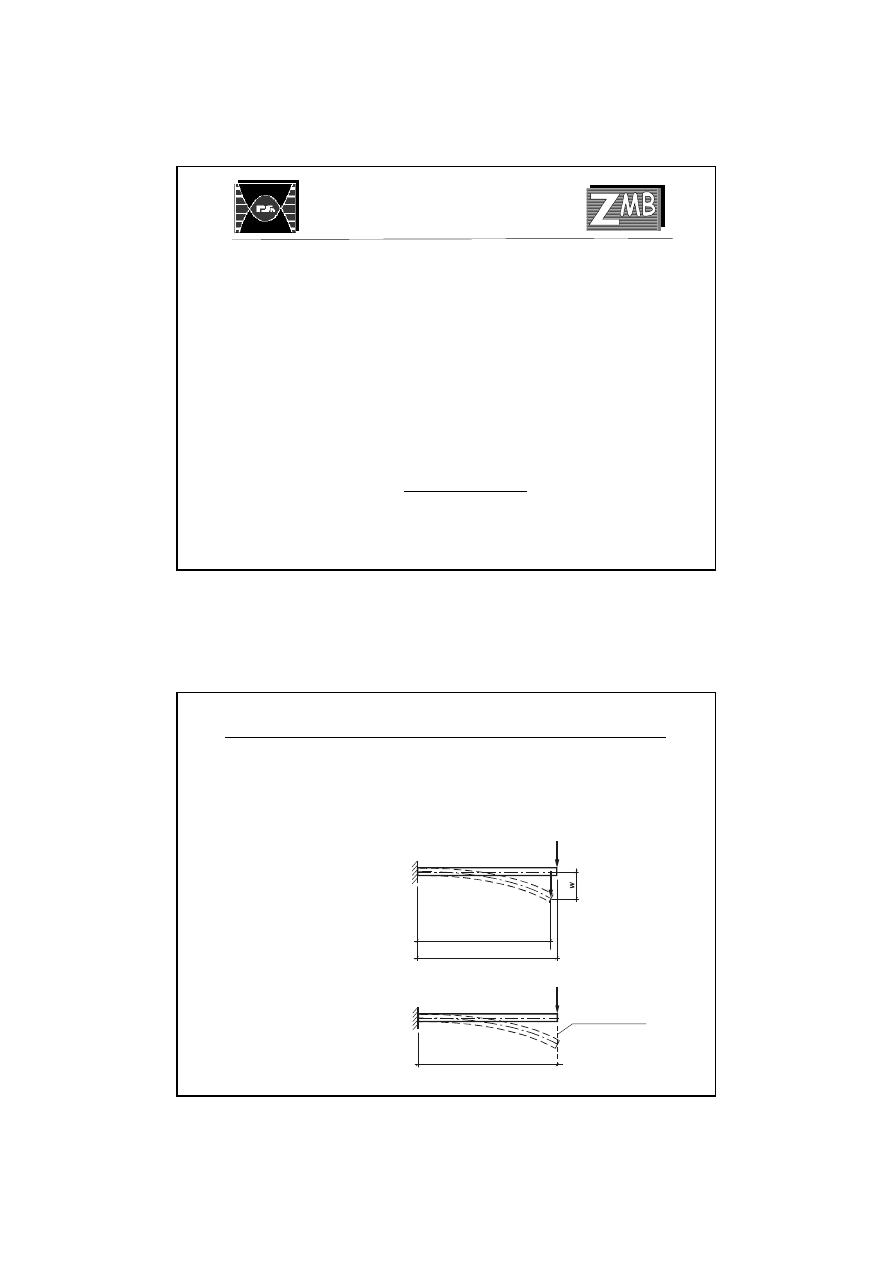
Zasada zesztywnienia
l’
l
P
P’
w< l
l
≈
l’
<
l
P
l = l’
linia działania siły P
3
Zasada superpozycji (dodawania skutków niezale
ż
nego działania sił)
P
2
P
1
f
A
(P
) 2
f
A
(P
)
f
A
1
P
2
P
1
=
+
A
A
A
f
A
=
( )
2
1
P
A
)
P
(
A
f
f
+
4
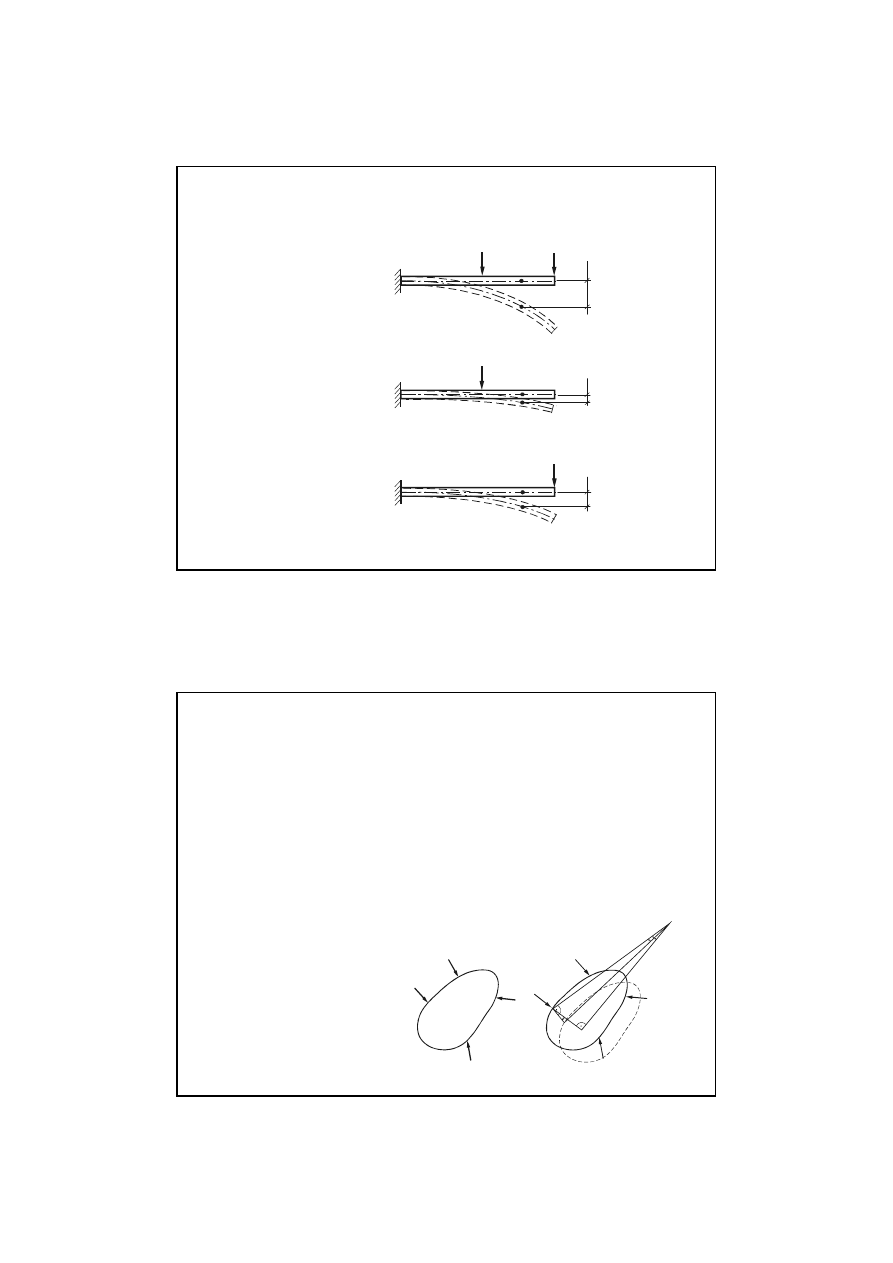
Zasada prac wirtualnych dla ciała doskonale sztywnego
Ciało materialne nazywamy doskonale sztywnym
je
ś
li odległo
ś
ci mi
ę
dzy jego punktami nie ulegaj
ą
zmianie
Przemieszczeniem wirtualnym ciała sztywnego nazywa
ć
b
ę
dziemy
dowolne jego odchylenie od poło
ż
enia równowagi, które spełnia
nast
ę
puj
ą
ce warunki:
1) jest bardzo małe
2) jest niezale
ż
ne od obci
ąż
enia rzeczywistego działaj
ą
cego na konstrukcj
ę
3) jest zgodne z wi
ę
zami zewn
ę
trznymi
4) jest niezale
ż
ne od czasu
1
2
n
i
P
1
P
2
P
i
P
n
1
2
n
i
P
1
P
2
P
i
P
n
δ
ι
α
ι
ϕ
α
ι
0
i’
r
i
ρ
i
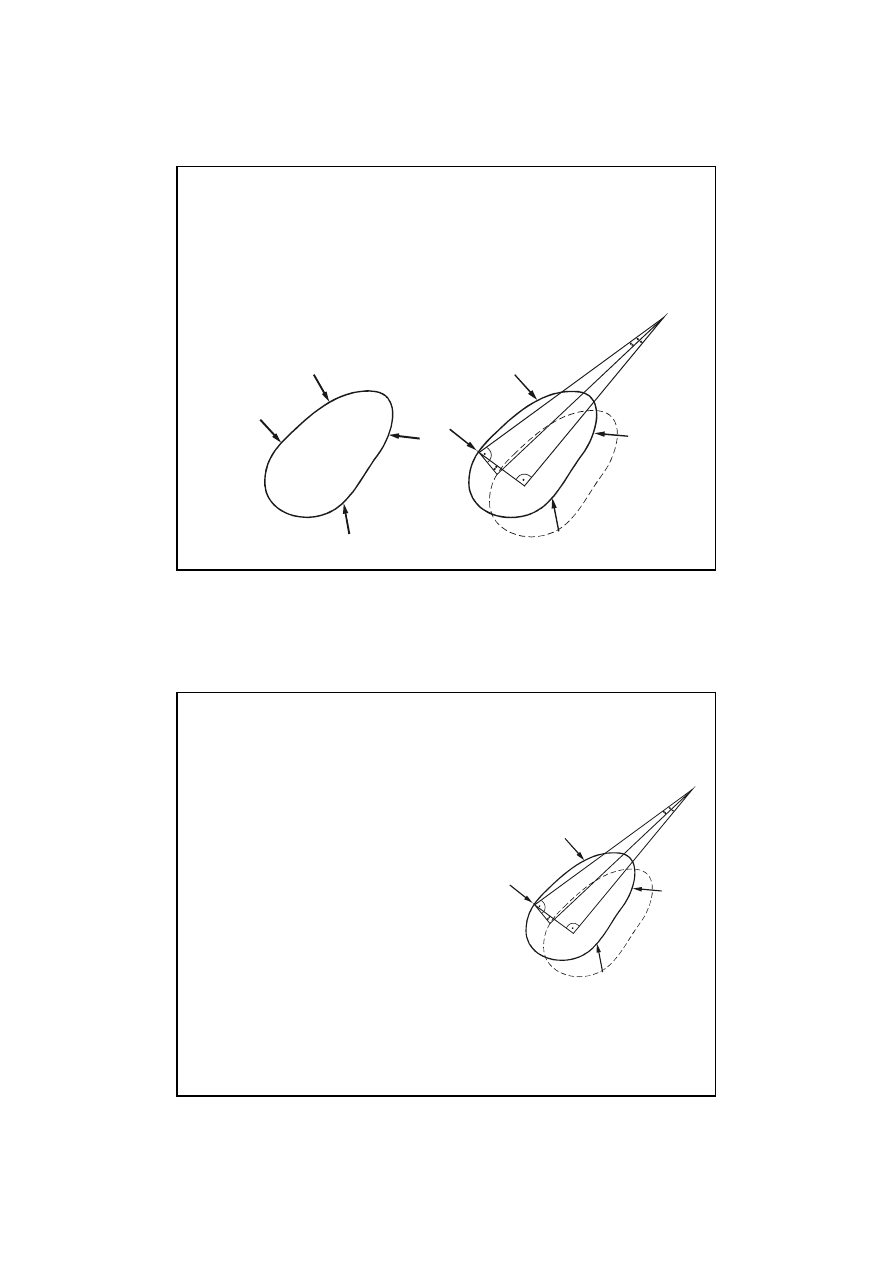
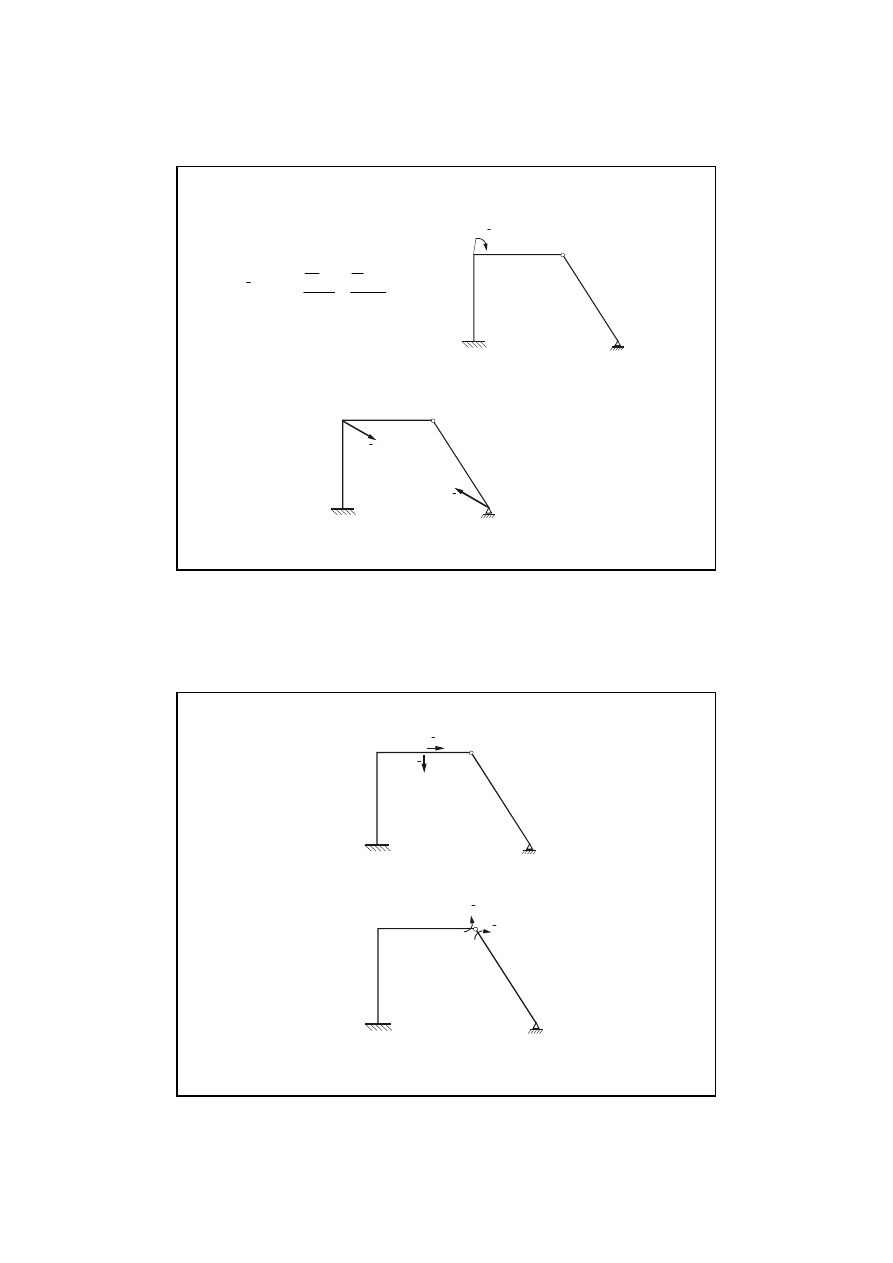
5
Ka
ż
de przemieszczenie płaskiego ciała sztywnego da si
ę
opisa
ć
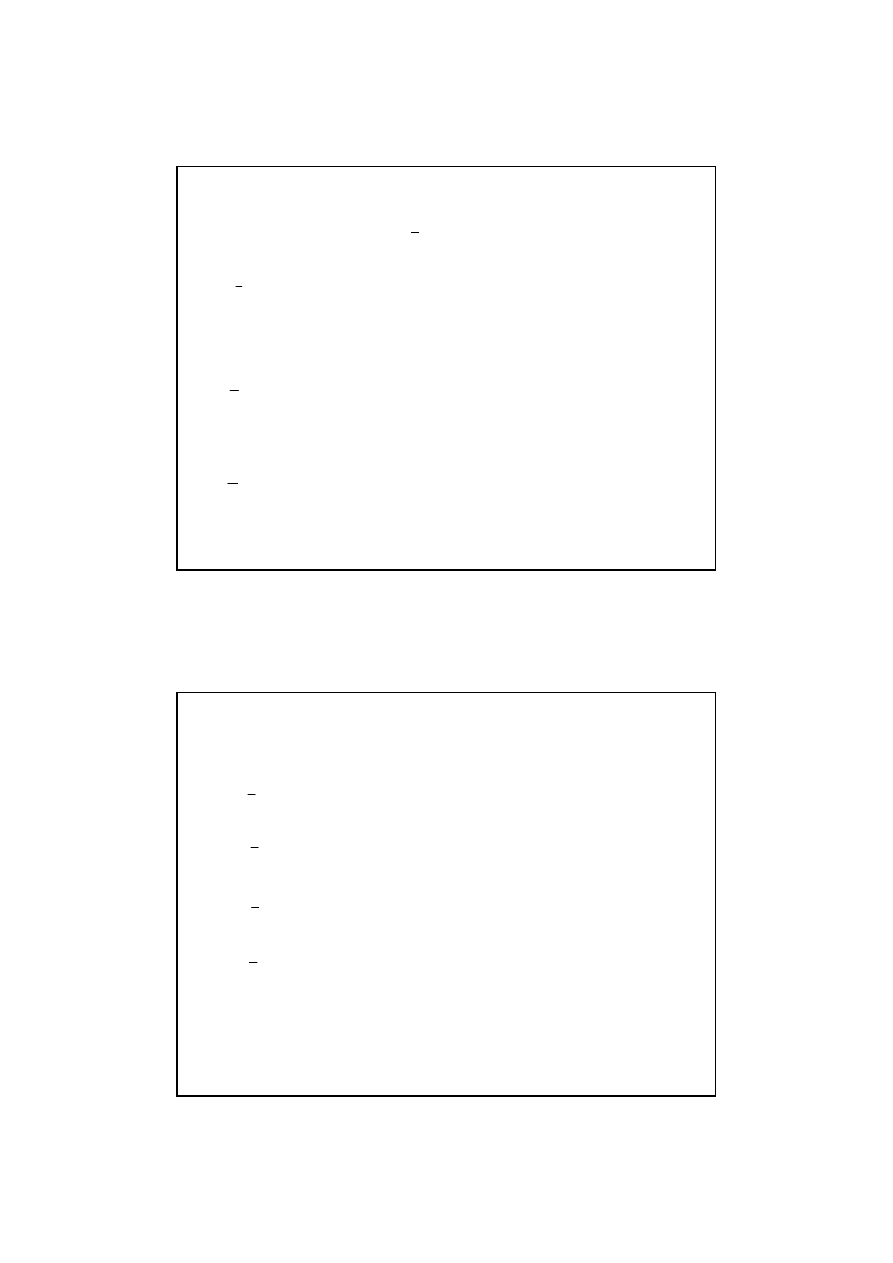
jako obrót wokół odpowiednio dobranego punktu. Dlatego nadajemy
rozpatrywanemu ciału przemieszczenie wirtualne identyczne z obrotem
o k
ą
t
ϕ
wokół punktu 0. Wskutek tego obrotu punkty zaczepienia sił
znajd
ą
si
ę
w poło
ż
eniach 1’, 2’, ...n', a ich przemieszczenia
wynios
ą
,
δ
1
,
δ
2
, ...
δ
n
.
1
2
n
i
P
1
P
2
P
i
P
n
1
2
n
i
P
1
P
2
P
i
P
n
δ
ι
α
ι
ϕ
α
ι
0
i’
r
i
ρ
i
6
Praca L
i
siły P
i
na wirtualnym przemieszczeniu
δ
i
L
i
= P
i
δ
i
cos
α
i
.
Poniewa
ż
k
ą
t
φ
jest bardzo mały, dlatego
δ
i
= r
i
φ
,
gdzie r
i
jest odległo
ś
ci
ą
mi
ę
dzy punktami i oraz 0.
L
i
=
φ
P
i
r
i
cos
α
i
=
φ
P
i
ρ
i
gdzie
ρ
i
= r
i
cos
α
i
- rami
ę
siły P
i
wzgl
ę
dem punktu 0
Praca wszystkich sił obci
ąż
aj
ą
cych:
L =
φ
(P
i
ρ
1 +
P
2
ρ
2
+ ... P
n
ρ
n
) =
φ
∑
=
n
i
i
i
P
1
ρ
Iloczyn P
i
ρ
i
przedstawia moment siły P
i
wzgl
ę
dem punktu 0
∑
=
n
i
i
i
P
1
ρ
- suma momentów wszystkich si
ł
obci
ąż
aj
ą
cych cia
ł
o wzgl
ę
dem tego punktu
L = 0
1
2
n
i
P
1
P
2
P
i
P
n
δ
ι
α
ι
ϕ
α
ι
0
i’
r
i
ρ
i
7
Warunkiem koniecznym i wystarczaj
ą
cym
równowagi ciała sztywnego
jest by praca wszystkich obci
ąż
e
ń
na przemieszczeniach wirtualnych była równa zeru.
Zasada pracy wirtualnej dla ciała doskonale sztywnego
8
Zasada prac wirtualnych dla ciała odkształcalnego
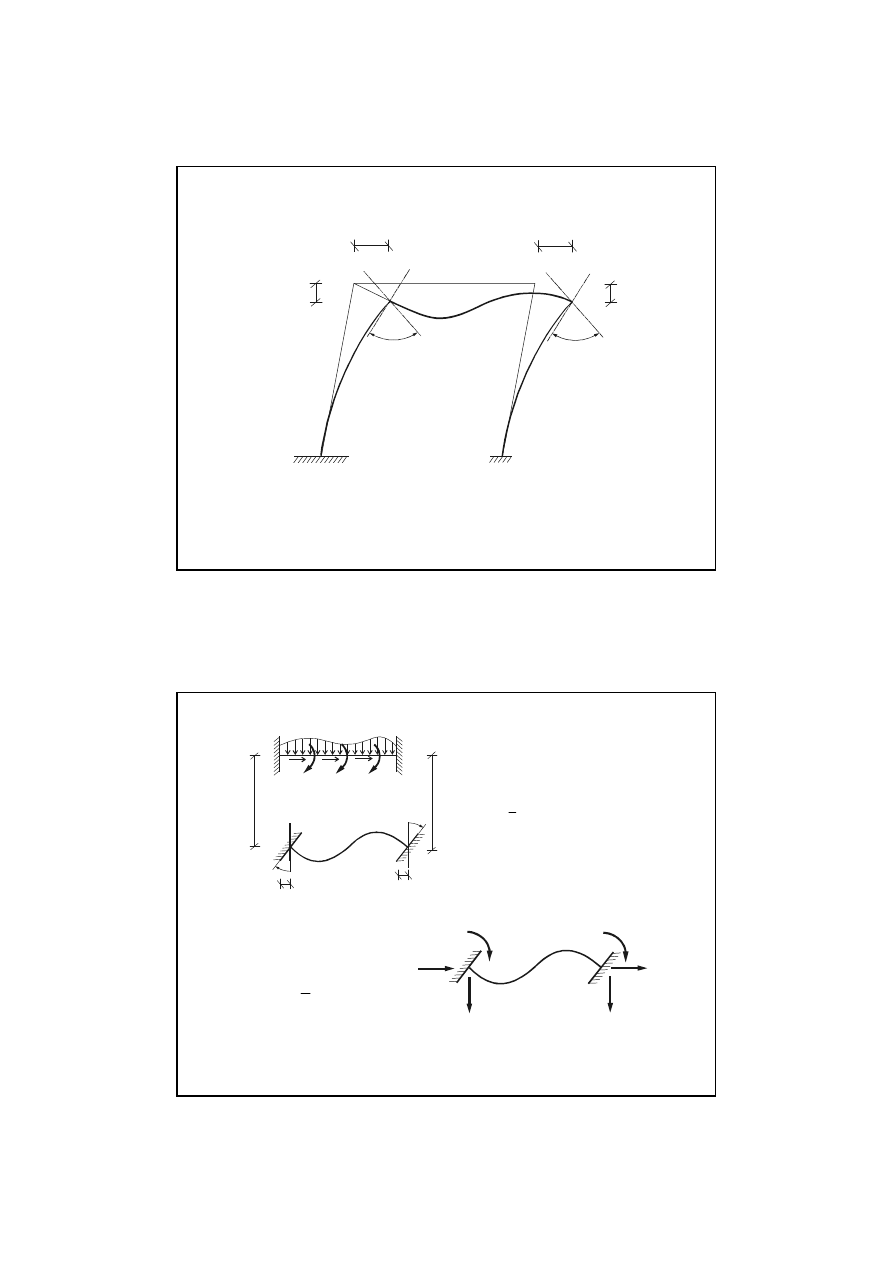
Dany jest pr
ę
t o osi prostoliniowej i stałym przekroju poprzecznym, b
ę
d
ą
cy
cz
ęś
ci
ą
dowolnego układu podpartego w sposób zapewniaj
ą
cy mu niezmienne
poło
ż
enie w przestrzeni
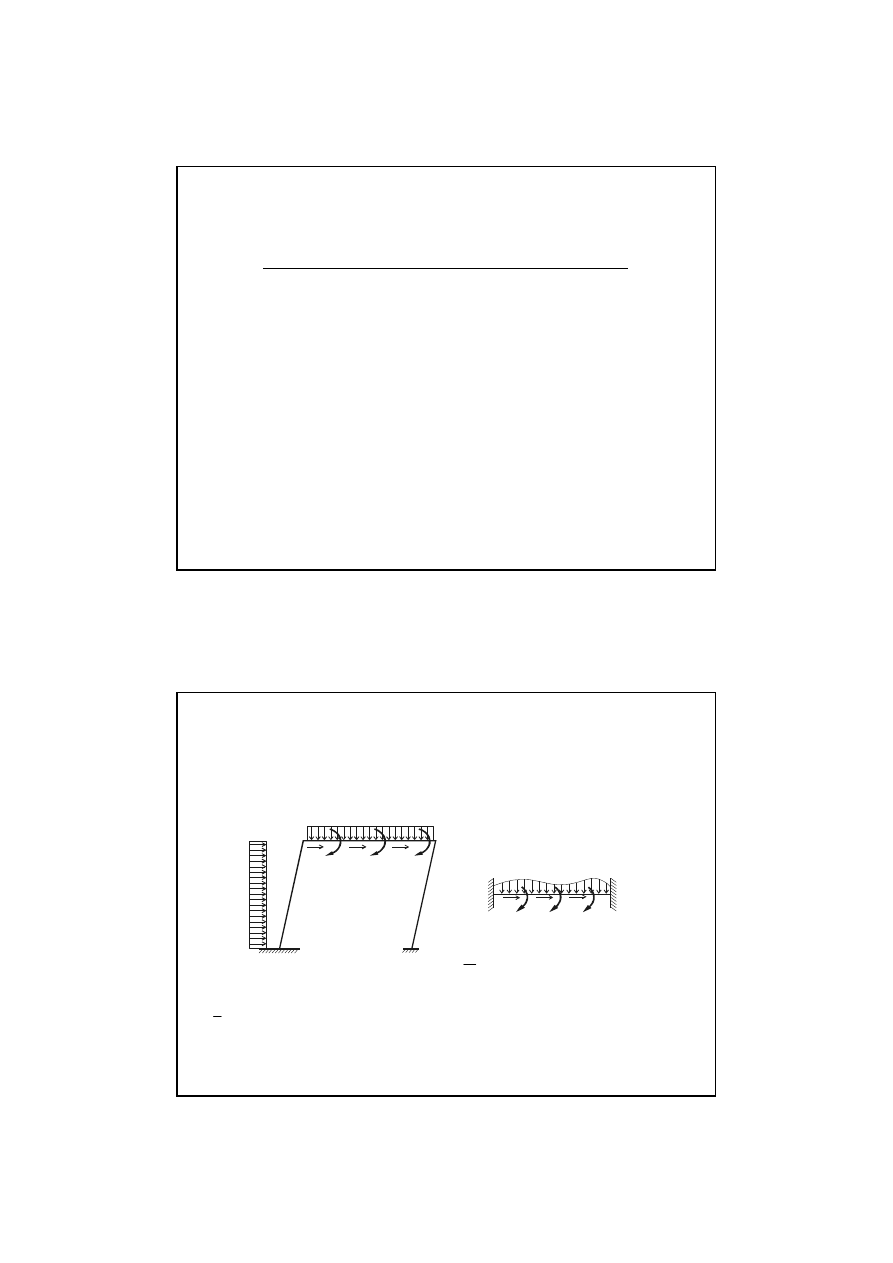
m
p
x
p
z
p
-
macierz obci
ąż
e
ń
zewn
ę
trznych
p
p
p
m
x
z
=
( )
( )
( )
x
m
m
x
p
p
x
p
p
z
x
=
=
=
-
obci
ąż
enie ci
ą
g
ł
e o kierunku osi pr
ę
ta
-
obci
ąż
enie ci
ą
g
ł
e o kierunku prostopad
ł
ym do osi pr
ę
ta
-
moment zginaj
ą
cy roz
ł
o
ż
ony wzd
ł
u
ż
osi pr
ę
ta
9
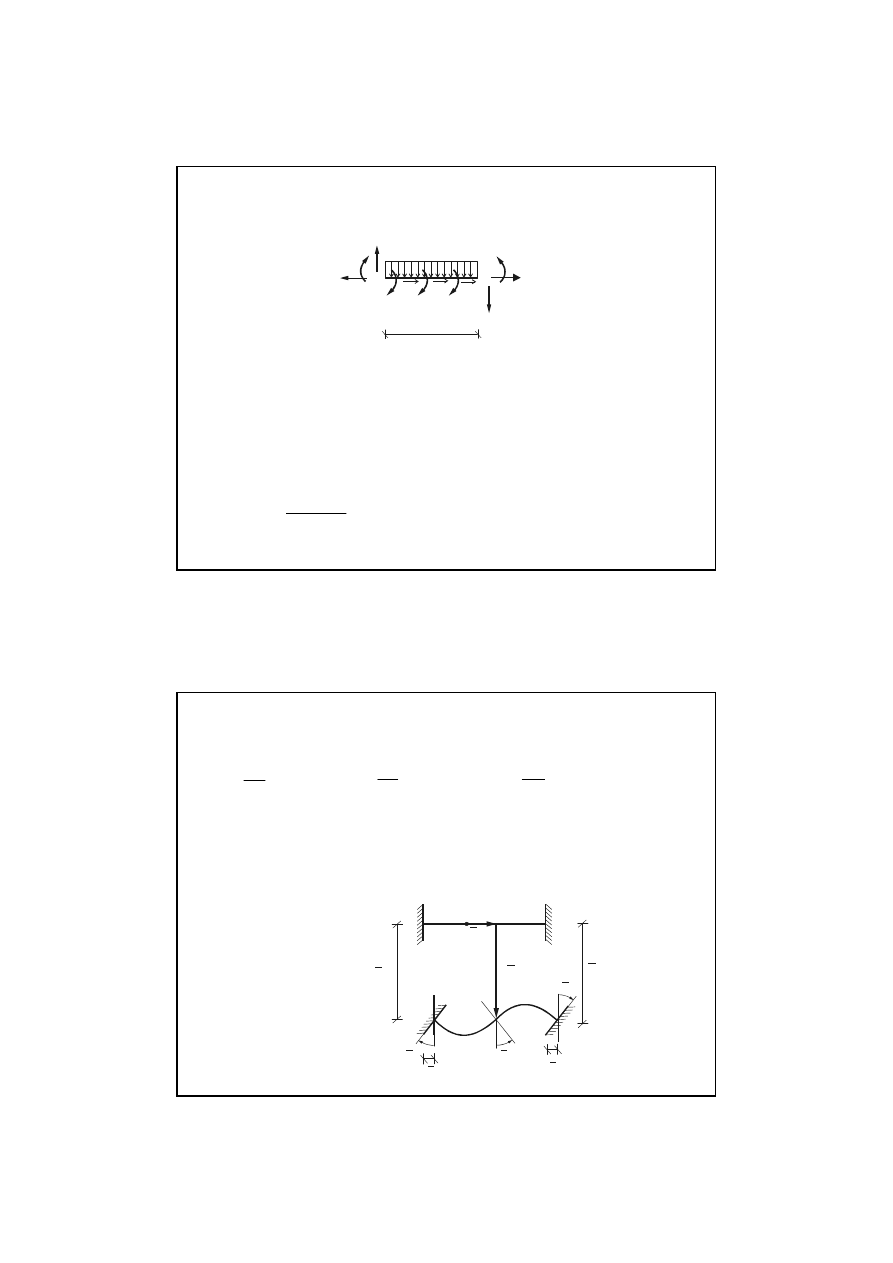
Pod wpływem obci
ąż
enia dowolny punkt osi pr
ę
ta doznaje przemieszczenia
opisanego za pomoc
ą
macierzy u.
u
u
w
=
ϕ
u
u x
w
w x
x
=
=
=
( )
( )
( )
ϕ ϕ
-
przemieszczenie poziome
- przemieszczenie pionowe
- k
ą
t obrotu
Pr
ę
t zmienia kształt co mo
ż
emy opisa
ć
definiuj
ą
c jego odkształcenia
=
ε
κ
ε ε
κ κ
=
=
( )
( )
x
x
ε
-
odkszta
ł
cenie pod
ł
u
ż
ne osi pr
ę
ta
-
krzywizna pr
ę
ta
W ka
ż
dym punkcie osi pr
ę
ta powstaj
ą
siły przekrojowe.
σ
=
N
T
M
)
(
)
(
)
(
x
M
M
x
T
T
x
N
N
=
=
=
10
Macierze te mo
ż
emy równie
ż
zapisa
ć
w postaci transponowanej
p
p
p
m
x
z
=
u
u w
=
ϕ
ε
ε κ
=
σ =
N T
M
- macierz obci
ąż
e
ń
statycznych
- macierz przemieszcze
ń
- macierz odkształce
ń
- macierz sił przekrojowych
Mog
ą
wyst
ą
pi
ć
równie
ż
obci
ąż
enia pozastatyczne, np.:
- osiadania podpór
- wpływy termiczne
11
u
i
u
j
w
i
w
j
ϕ
i
ϕ
j
12
m
p
x
p
z
w
i
w
j
ϕ
i
ϕ
j
u
i
u
j
w
i
w
j
φ
i
φ
j
U
i
U
j
q
u
w
u
w
i
i
i
j
j
j
=
ϕ
ϕ
Q
U
W
U
W
i
i
i
j
j
j
=
Φ
Φ
13
m
dx
p
x
p
z
T
M
N
M+dM
N+dN
T+dT
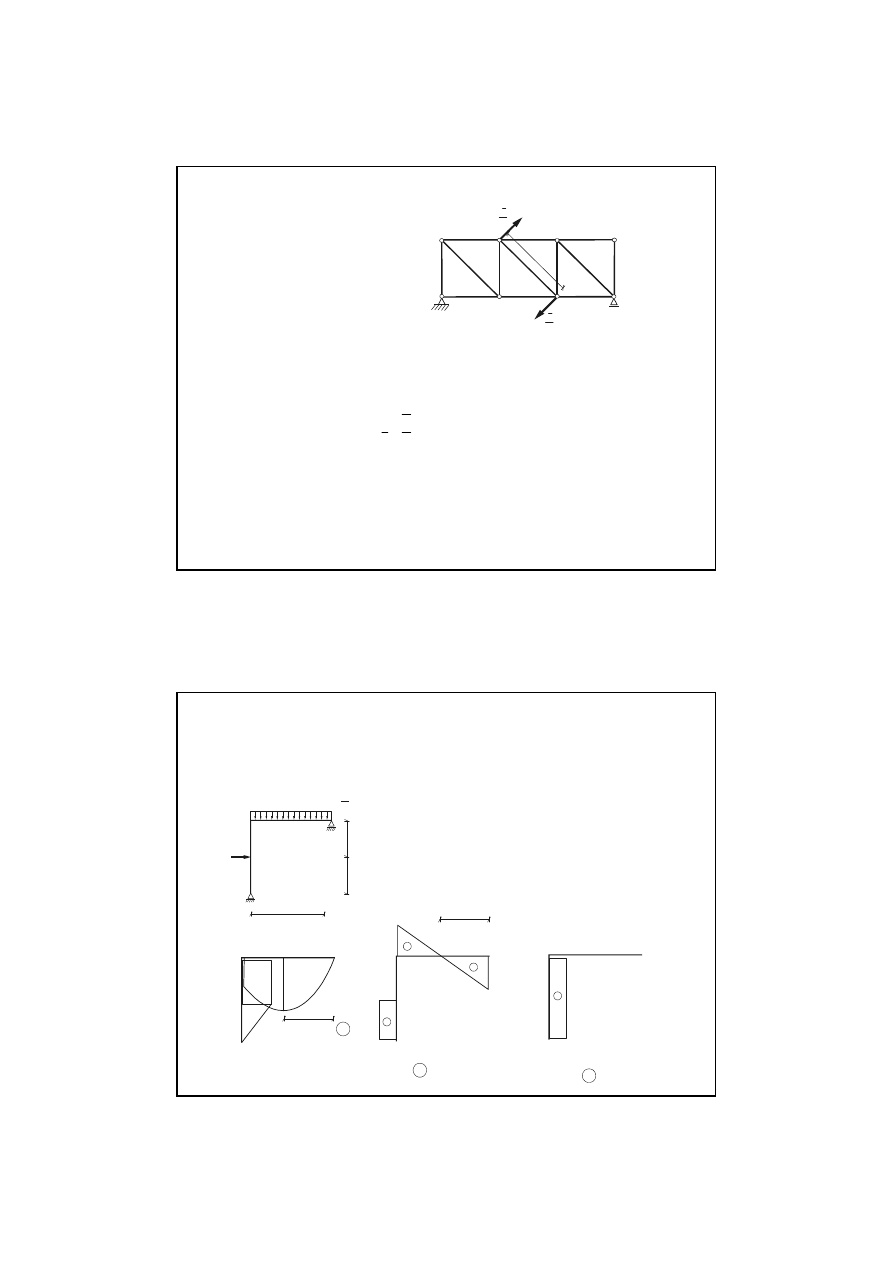
Wycinek pr
ę
ta o długo
ś
ci dx poddany działaniu obci
ąż
enia zewn
ę
trznego
i dwóch układów sił przekrojowych, który musi pozosta
ć
w stanie równowagi
− +
+
+
=
N
N
dN
p dx
x
0;
− + +
+
=
T
T
dT
p dx
z
0;
−
+
+
−
− ⋅
=
M
M
dM
Tdx
m dx
0
2
dx
dx
p
z
⋅
- człon pomini
ę
ty jako wielko
ść
mała wy
ż
szego rz
ę
du
14
Po redukcji i podzieleniu stronami przez dx (dowolnie małe ale nie równe zeru)
otrzymujemy ró
ż
niczkowe równania równowagi w postaci:
dN
dx
p
x
+
=
0
dT
dx
p
z
+
=
0
dM
dx
T
m
− − =
0
Tak obci
ąż
onemu pr
ę
towi nadajemy mo
ż
liwe, wirtualne przemieszczenia, które s
ą
:
-
bardzo małe w porównaniu z wymiarami pr
ę
ta
-
niezale
ż
ne od obci
ąż
e
ń
rzeczywistych działaj
ą
cych na pr
ę
t
-
mo
ż
liwe, czyli zgodne z warunkami ograniczaj
ą
cymi ruch pr
ę
ta.
w
i
w
j
ϕ
i
ϕ
j
u
i
u
j
A
A’
u
w
ϕ
15
W stanie wirtualnym równie
ż
definiujemy nast
ę
puj
ą
ce wektory:
u
u w
=
ϕ
- macierz wirtualnych przemieszcze
ń
punktów osi pr
ę
ta
- wektor wirtualnych przemieszcze
ń
skrajnych przekrojów pr
ę
ta
=
κ
ε
ε
- macierz wirtualnych odkształce
ń
pr
ę
ta
q
u
w
u
w
i
i
i
j
j
j
=
ϕ
ϕ
u
w
Pierwsze, drugie równanie mno
ż
ymy odpowiednio przez
,
ca
ł
kujemy w granicach od 0 do
l
i dodajemy.
dN
dx
p
udx
x
l
+
+
∫
0
dT
dx
p
wdx
z
l
+
=
∫
0
0
dN
dx
p
x
+
=
0
dT
dx
p
z
+
=
0
,
(
)
dN
dx
udx
dT
dx
wdx
p u
p w dx
l
l
x
z
l
0
0
0
0
∫
∫
∫
+
+
+
=
16
W wyniku całkowania przez cz
ęś
ci, otrzymujemy:
[ ]
dN
dx
udx
N u
N
d u
dx
dx
l
l
l
0
0
0
∫
∫
=
−
[ ]
dT
dx
wdx
T w
T
d w
dx
dx
l
o
l
l
0
0
∫
∫
=
⋅
−
Uwzgl
ę
dniaj
ą
c trzecie z równa
ń
ró
ż
niczkowych
T
dM
dx
m
=
−
[ ]
[ ]
[ ]
dT
dx
wdx
T w
T
d w
dx
dx
T w
dM
dx
d w
dx
dx
m
d w
dx
dx
T w
M
d w
dx
M
d w
dx
dx
m
d w
dx
dx
l
l
l
l
l
l
l
l
l
l
=
⋅
−
=
−
+
=
=
−
+
+
∫
∫
∫
∫
∫
∫
0
0
0
0
0
0
0
0
2
2
0
0
a nast
ę
pnie całkuj
ą
c ponownie przez cz
ęś
ci :
1)
2)
3)
17
(
)
dN
dx
udx
dT
dx
wdx
p u
p w dx
l
l
x
z
l
0
0
0
0
∫
∫
∫
+
+
+
=
Podstawiaj
ą
c równania 1), 2), i 3) do równania:
otrzymujemy:
[ ] [ ]
N u
T w
M
d w
dx
p u
p w
m
d w
dx
dx
N
d u
dx
dx
M
d w
dx
dx
l
l
l
x
z
l
l
l
0
0
0
0
0
0
2
2
+
−
⋅
+
+
+
=
−
⋅
∫
∫
∫
dx
w
d
=
ϕ
je
ś
li:
[ ] [ ] [ ]
(
)
N u
T w
M
p u
p w
m dx
N
d u
dx
dx
M
d w
dx
dx
l
l
l
x
z
l
l
l
0
0
0
0
0
2
2
0
+
−
+
+
+
=
−
∫
∫
∫
ϕ
ϕ
4)
18
uwzgl
ę
dniaj
ą
c granice całkowania:
[ ]
( ) ( )
( ) ( )
0
0
0
u
N
l
u
l
N
u
N
l
−
=
( )
u l
u
j
=
( )
u
u
i
0
=
( )
N l
U
j
=
( )
N
U
i
0
= −
[ ]
j
j
i
i
l
u
U
u
U
u
N
+
=
0
otrzymujemy:
analogicznie:
[ ]
j
j
i
i
l
w
W
w
W
w
T
⋅
+
⋅
=
0
[ ]
j
j
i
i
l
M
ϕ
ϕ
ϕ
⋅
Φ
+
⋅
Φ
=
0
(
)
dx
m
w
p
u
p
w
W
w
W
u
U
u
U
l
z
x
j
j
i
i
j
j
i
i
j
j
i
i
∫
+
+
+
Φ
+
Φ
+
+
+
+
0
ϕ
ϕ
ϕ
lewa strona równania 4) przyjmuje posta
ć
:
oraz
Jest to praca wszystkich rzeczywistych zewn
ę
trznych sił (obci
ąż
e
ń
) na
odpowiadaj
ą
cym im wirtualnych przemieszczeniach.
19
dx
M
dx
N
l
l
κ
ε
∫
∫
+
0
0
Prawa strona to
praca rzeczywistych sił przekrojowych na wirtualnych odkształceniach
gdzie:
ε
=
=
∆
dx
dx
d u
dx
2
2
3
2
2
2
1
dx
w
d
dx
w
d
dx
w
d
−
≈
+
−
=
κ
wykorzystuj
ą
c zdefiniowane poprzednio wektory
σ
ε
,
,
,
,
,
p
u
Q
q
[
]
dx
M
N
dx
m
p
p
w
u
W
U
W
U
w
u
w
u
l
z
x
l
j
j
j
i
i
i
j
j
j
i
i
i
⋅
=
⋅
+
Φ
Φ
⋅
∫
∫
0
0
κ
ε
ϕ
ϕ
ϕ
,
20
dx
dx
p
u
Q
q
l
T
l
T
T
σ
ε
⋅
=
⋅
+
⋅
∫
∫
0
0
I wariant zasady prac wirtualnych
(wirtualne wielko
ś
ci geometryczne i rzeczywiste wielko
ś
ci statyczne)
p
σ
Q
p
Dany jest ustrój poddany działaniu obciążenia zewnętrznego
które powoduje powstanie sił przekrojowych
oraz reakcji węzłów
.
oraz wymienione wielkości nazywamy rzeczywistymi.
Obciążenie rzeczywiste
wykonuje na wirtualnych
przemieszczeniach ustroju pracę równą pracy sił przekrojowych
wykonanej na wirtualnych odkształceniach.
,
Stan równowagi tego ustroju
21
Je
ż
eli jako wirtualne potraktujemy obci
ąż
enie, a jako rzeczywiste
przemieszczenia i odkształcenia. Od obci
ąż
enia wirtualnego działaj
ą
cego
na pr
ę
t
żą
damy tylko aby spełniało warunki równowagi. Jest to wi
ę
c ten
sam warunek jaki spełniało obci
ąż
enie rzeczywiste. Poniewa
ż
za
ś
rzeczywiste przemieszczenia spełniaj
ą
wszystkie warunki, jakie
w poprzednim punkcie narzucili
ś
my przemieszczeniom wirtualnym,
przeto twierdzenie o pracy obci
ąż
e
ń
wirtualnych na rzeczywistych
przemieszczeniach nie wymaga oddzielnego dowodu. Poni
ż
ej podajemy
to twierdzenie w zapisie macierzowym.
22
{
}
p
p p m
x
z
=
( )
p
p x
=
{
}
j
j
j
i
i
i
W
U
W
U
Q
Φ
Φ
=
Wirtualny stan obci
ąż
enia
=
M
N
σ
( )
σ σ
=
x
σ
ε
∫
∫
=
+
l
T
l
T
T
dx
p
u
Q
q
0
0
wirtualny stan napr
ęż
enia
II wariant zasady prac wirtualnych
(wirtualne wielko
ś
ci statyczne i rzeczywiste wielko
ś
ci geometryczne)
Jeżeli na ustrój odkształcalny działa wirtualne obciążenie zewnętrzne
spełniające warunki równowagi , to na rzeczywistych przemieszczeniach
wykonuje ono pracę równą pracy wirtualnych sił przekrojowych wykonanej
na rzeczywistych odkształceniach.
23
=
M
N
σ
ε
ε κ
=
ε
=
N
EA
κ =
M
EJ
dx
M
N
EJ
M
EA
N
dx
p
u
Q
q
l
l
T
T
=
+
∫
∫
0
0
dx
EJ
M
M
dx
EA
N
N
dx
p
u
Q
q
l
l
l
T
T
∫
∫
∫
+
=
+
0
0
0
Uwzgl
ę
dniaj
ą
c:
gdzie:
24
Twierdzenie o pracy obci
ąż
e
ń
wirtualnych na rzeczywistych przemieszczeniach
znajduje praktyczne zastosowanie do wyznaczania przemieszcze
ń
konstrukcji.
Chc
ą
c wyznaczy
ć
przemieszczenie ustroju odkształconego pod wpływem
dowolnego obci
ąż
enia wystarczy jako obci
ąż
enie wirtualne przyj
ąć
uogólnion
ą
sił
ę
jednostkow
ą
, działaj
ą
c
ą
na kierunku poszukiwanego przemieszczenia.
Prac
ę
wirtualn
ą
tej siły na odpowiednim przemieszczeniu zwi
ę
kszon
ą
ewentualnie o prac
ę
wirtualnych reakcji na rzeczywistych przemieszczeniach
podpór, trzeba przyrówna
ć
do pracy wirtualnych sił przekrojowych na
rzeczywistych odkształceniach
dx
EJ
M
M
dx
EA
N
N
Q
q
l
l
T
∫
∫
+
=
+
0
0
1
δ
δ
- poszukiwane rzeczywiste przemieszczenie
25
Dobór obci
ąż
enia jednostkowego:
∫
⋅
+
=
⋅
S
i
ds
EA
N
N
EJ
M
M
φ
1
1
i
ik
l
∆
i
φ
1
1
i
k
26
1
1
i
i
i
w
u ,
i
ϕ
∆
1
1
C
27
k
ą
ta obrotu pr
ę
ta kratownicy
i
k
l
ik
1
l
ik
1
l
ik
Je
ż
eli rozwa
ż
ania z poziomu pr
ę
ta „wyj
ę
tego” z układu pr
ę
towego przeniesiemy
na poziom konstrukcji składnik przy obliczaniu przemieszcze
ń
b
ę
dzie ukazywał
na przykład wpływ osiadania podpór układu na warto
ść
szukanego przemieszczenia.
Wirtualnymi siłami w
ę
złowymi b
ę
d
ą
wówczas reakcje podporowe powstałe w układzie
od obci
ąż
enia wirtualnego, natomiast rzeczywistymi przemieszczeniami w
ę
złowymi
warto
ś
ci przemieszcze
ń
podpór.
Q
q
T
⋅
28
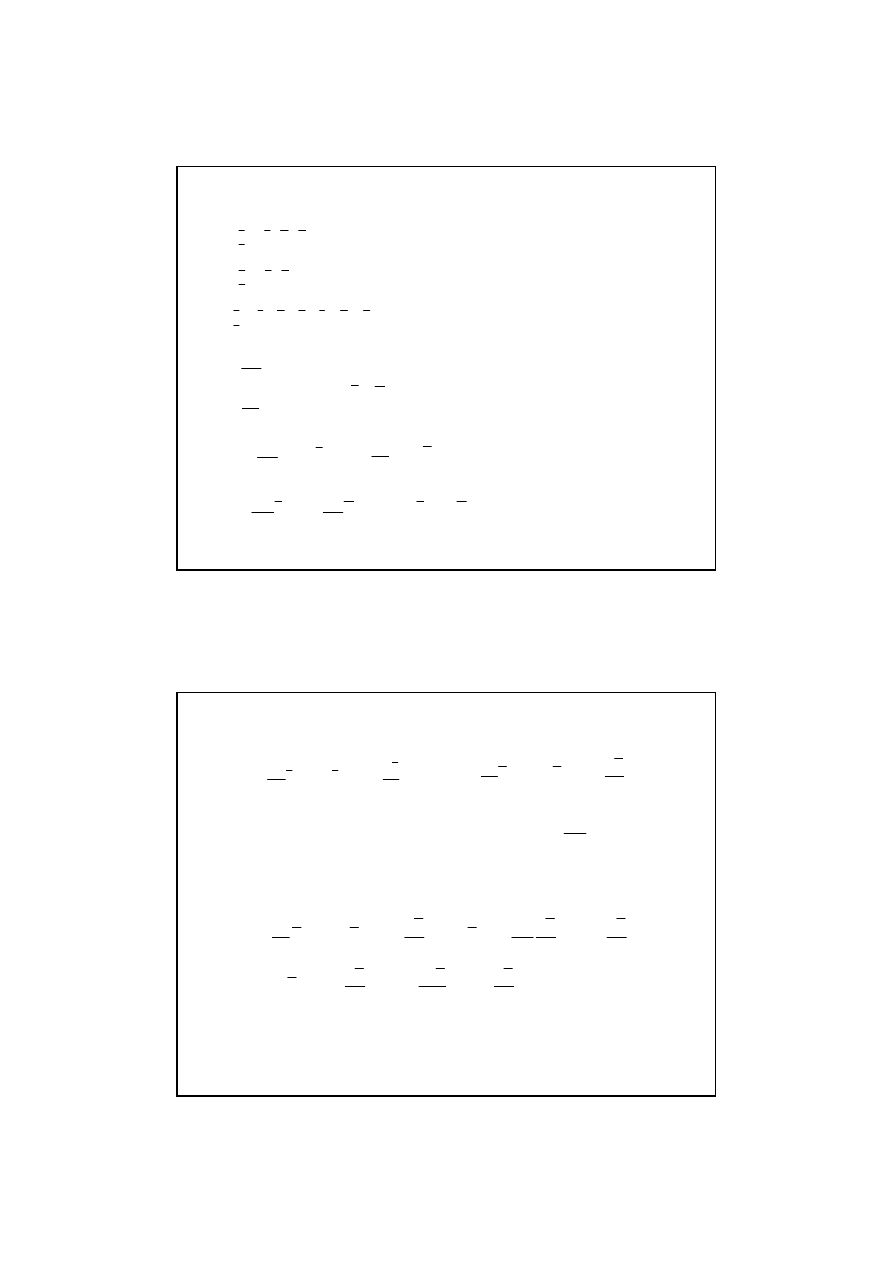
Dla podanej ramy wyznaczy
ć
przemieszczenie poziome u rygla.
Przykład 1
5kN
5m
2m
2m
10
kN
m
M
2,7m
36,45kNm
10kNm
T
2,7m
+
+
-
23kN
5kN
27kN
N
-
23kN
Stan rzeczywisty
29
Stan wirtualny
M
5m
4m
4
5
4
5
2
4
4
1
1
4
5
4
5
+
+
+
1
1
-
N
T
30
Obliczenie przemieszczenia u z udziałem momentu zginaj
ą
cego, siły
poprzecznej i siły normalnej przeprowadzono przy zało
ż
eniu,
ż
e przekroje
słupa i rygla s
ą
wykonane z dwuteowników I 260.
Dwuteownik I 260:
pole powierzchni A = 53,32 cm
2
= 53,32
·
10
-4
m
2
moment bezw
ł
adno
ś
ci I
y
= 5735 cm
4
= 5735
·
10
-8
m
4
⋅
wska
ź
nik wytrzyma
ł
o
ś
ci Wy = 441,1 cm
3
= 441,1
·
10
-6
m
3
⋅
modu
ł
Younga
2
6
10
210
m
kN
E
⋅
=
modu
ł
spr
ęż
ysto
ś
ci postaciowej
2
6
10
81
m
kN
G
⋅
=
liczba Poissona
3
.
0
=
ν
stal St 3S
2
3
10
220
m
kN
R
⋅
=
31
u
M
– przemieszczenie uwzgl
ę
dniaj
ą
ce wpływ momentów zginaj
ą
cych
(
)
=
⋅
⋅
⋅
⋅
+
⋅
⋅
⋅
⋅
+
⋅
⋅
+
+
⋅
⋅
⋅
⋅
⋅
⋅
⋅
=
−
2
5
8
25
10
3
2
10
3
2
5
4
2
1
10
2
2
4
2
1
10
3
2
2
2
2
1
10
5735
10
210
1
8
6
M
u
=
0,0289m = 2,89 cm
u
T
– przemieszczenie uwzgl
ę
dniaj
ą
ce wpływ sił tn
ą
cych
=
⋅
⋅
+
⋅
⋅
⋅
+
⋅
⋅
⋅
−
⋅
⋅
⋅
⋅
=
−
1
2
5
5
4
27
5
2
1
5
4
23
5
2
1
10
32
,
53
10
81
2
,
2
4
6
T
u
cm
m
009169
,
0
10
169
,
9
5
====
⋅⋅⋅⋅
====
−−−−
u
N
– przemieszczenie uwzgl
ę
dniaj
ą
ce wpływ sił normalnych
( )
cm
cm
m
u
N
006573
,
0
10
573
,
6
10
573
,
6
5
4
4
23
10
32
,
53
10
210
1
3
5
4
6
−
=
⋅
−
=
⋅
−
=
⋅
⋅
⋅
⋅
⋅
⋅
−
=
−
−
−
32
Oprócz przemieszcze
ń
spowodowanych obci
ąż
eniem czynnym czy osiadaniem
podpór w układach konstrukcyjnych mog
ą
pojawi
ć
si
ę
przemieszczenia wywołane
zmianami temperatury.
Wyró
ż
niamy dwa rodzaje działa
ń
termicznych na konstrukcje pr
ę
towe:
b) nierównomierne działanie temperatury na jeden pr
ę
t, kilka pr
ę
tów lub wszystkie
pr
ę
ty (przyjmujemy,
ż
e panuje inna temperatura we włóknach górnych i dolnych
pr
ę
tów),
a) równomierne nagrzanie (ozi
ę
bienie) jednego lub wszystkich pr
ę
tów,
Równanie pracy wirtualnej uwzgl
ę
dniaj
ą
ce wpływ działa
ń
termicznych
na konstrukcj
ę
przyjmuje nast
ę
puj
ą
c
ą
posta
ć
:
ds
t
N
ds
h
t
M
O
S
S
α
α
δ
∫
∫
+
∆
⋅
=
⋅
1
33
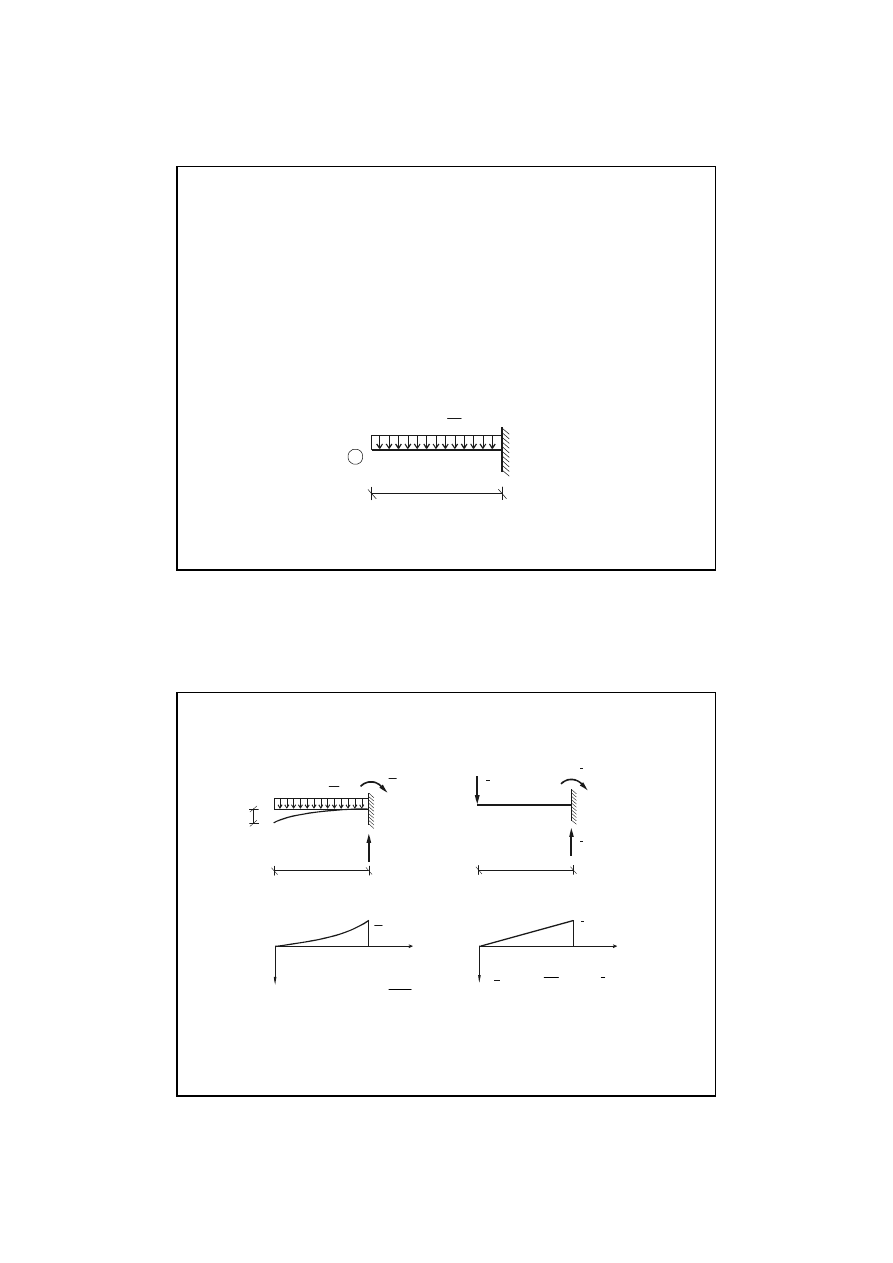
Wykorzystanie zasady prac wirtualnych do obliczania przemieszcze
ń
Przykład 1
Dana jest belka wspornikowa o d
ł
ugo
ś
ci l obci
ąż
ona obci
ąż
eniem równomiernie
roz
ł
o
ż
onym o intensywno
ś
ci p. Obliczy
ć
k
ą
t obrotu ko
ń
ca wspornika
ϕ
i
oraz
przemieszczenie pionowe ko
ń
ca wspornika w
i
.
Moment bezwładno
ś
ci przekroju belki jest jednakowy, EJ=const.
l
i
p kN
m
[
[
34
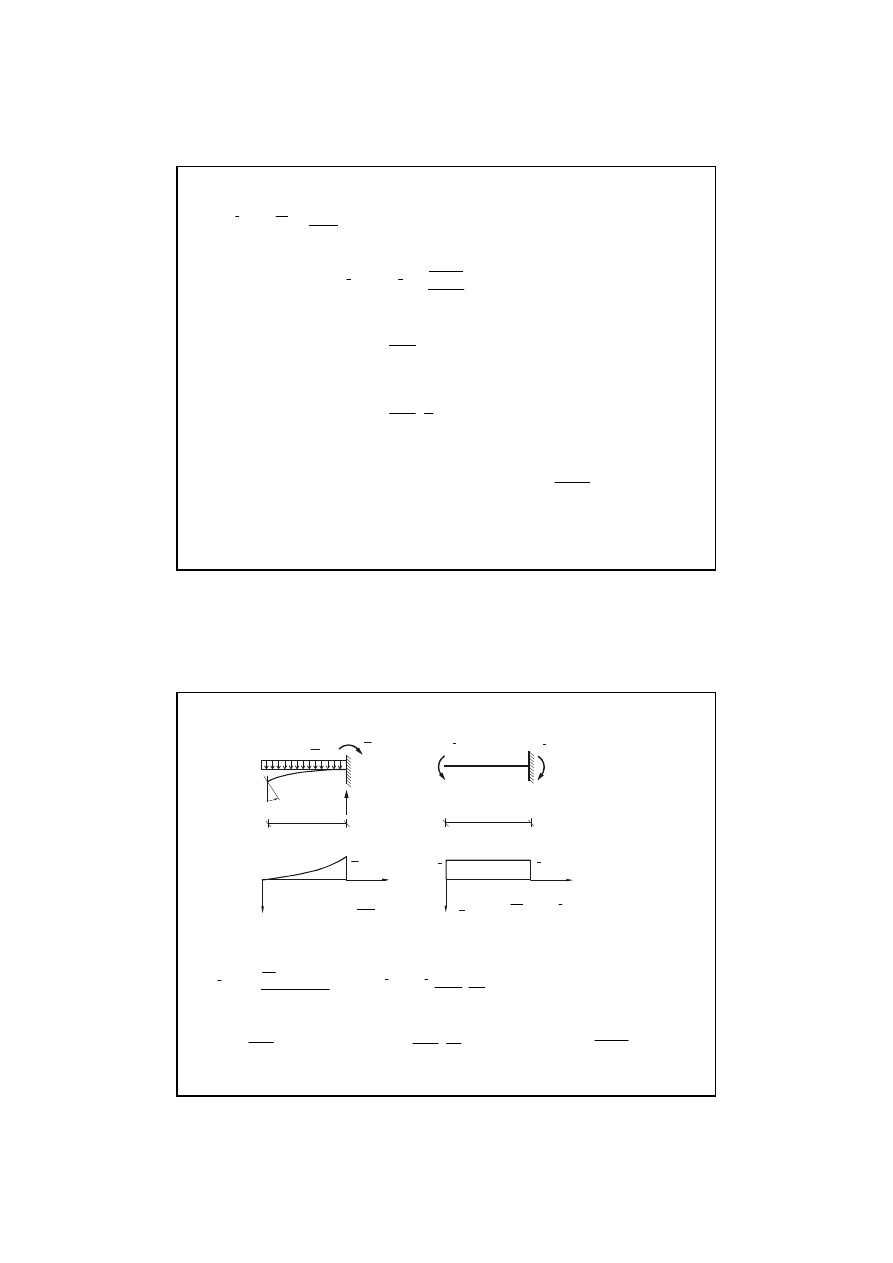
Stan rzeczywisty
Stan wirtualny
w
i
l
p kN
m
[
[
l
pl [kN]
pl
2
2
[kNm]
pl
2
2
M(x)
x
M(x)
x
1
1
1l
1l
Wykres momentów zginaj
ą
cych od obci
ąż
enia
wirtualnego
Wykres momentów zginaj
ą
cych od obci
ąż
enia
rzeczywistego
2
)
(
2
px
x
M
−
=
x
x
M
⋅
−
=
1
)
(
35
dx
EJ
x
M
x
M
w
l
i
)
(
)
(
1
0
⋅
=
⋅
∫
1
1
2
0
2
⋅
=
⋅ ⋅
⋅
∫
w
x
p x
EJ
dx
i
l
w
p
EJ
x dx
i
l
=
∫
2
3
0
w
p
EJ
x
i
l
=
2
1
4
4
0
w
pl
EJ
i
=
4
8
36
Stan rzeczywisty
Stan wirtualny
l
pl
2
2
M(x)
x
M(x)
x
1
1
1
1
l
p kN
m
[
[
pl [kN]
pl
2
2
[kNm]
ϕ
l
Wykres momentów zginaj
ą
cych
od obci
ąż
enia wirtualnego
Wykres momentów zginaj
ą
cych
od obci
ąż
enia rzeczywistego
2
)
(
2
px
x
M
−
=
1
)
(
−
=
x
M
dx
EJ
x
M
x
M
l
i
⋅
⋅
=
⋅
∫
0
)
(
)
(
1
ϕ
dx
EJ
x
p
l
i
⋅
⋅
⋅
⋅
=
⋅
∫
1
2
1
1
2
0
ϕ
dx
x
EJ
p
l
i
⋅
=
∫
0
2
2
ϕ
l
i
x
EJ
p
0
3
3
2
=
ϕ
ϕ
i
pl
EJ
=
3
6
37
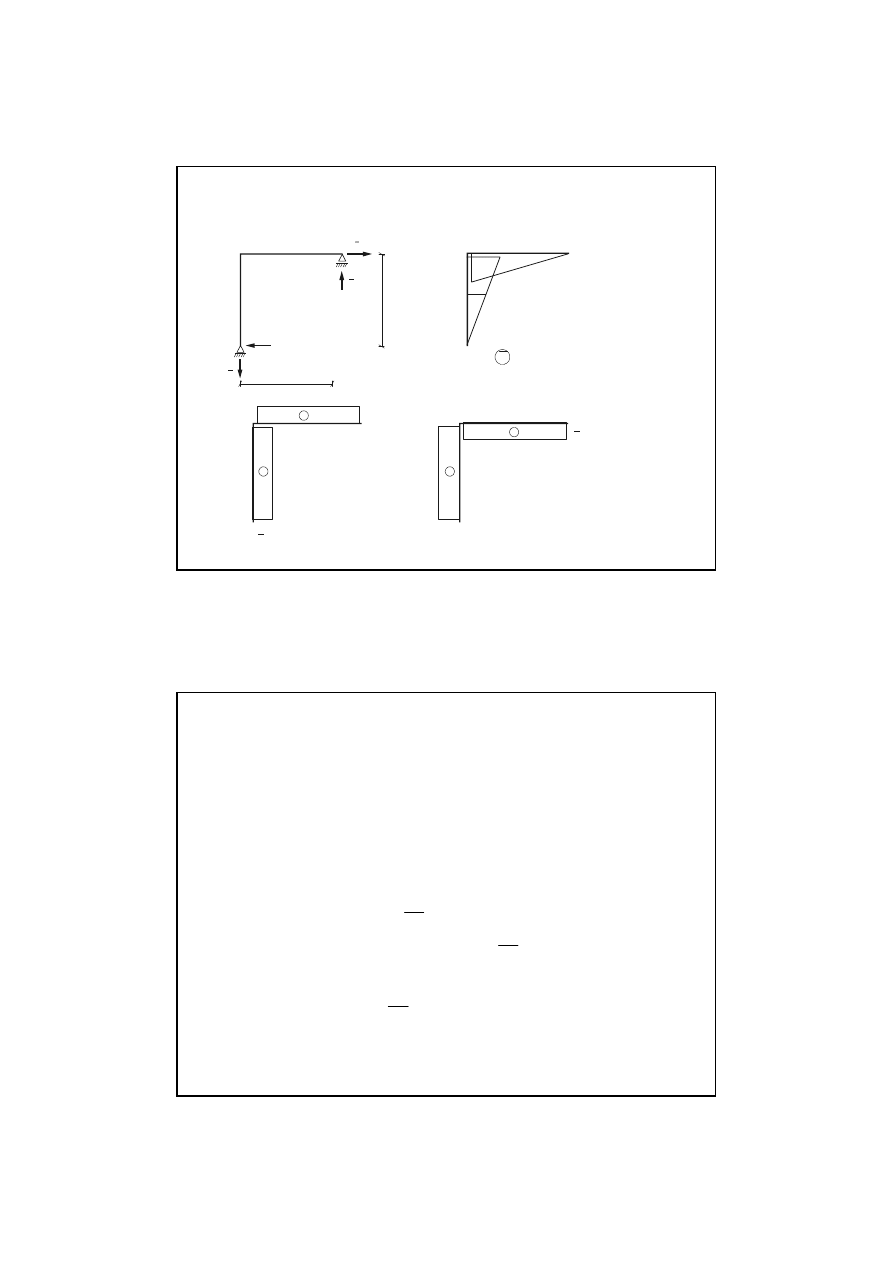
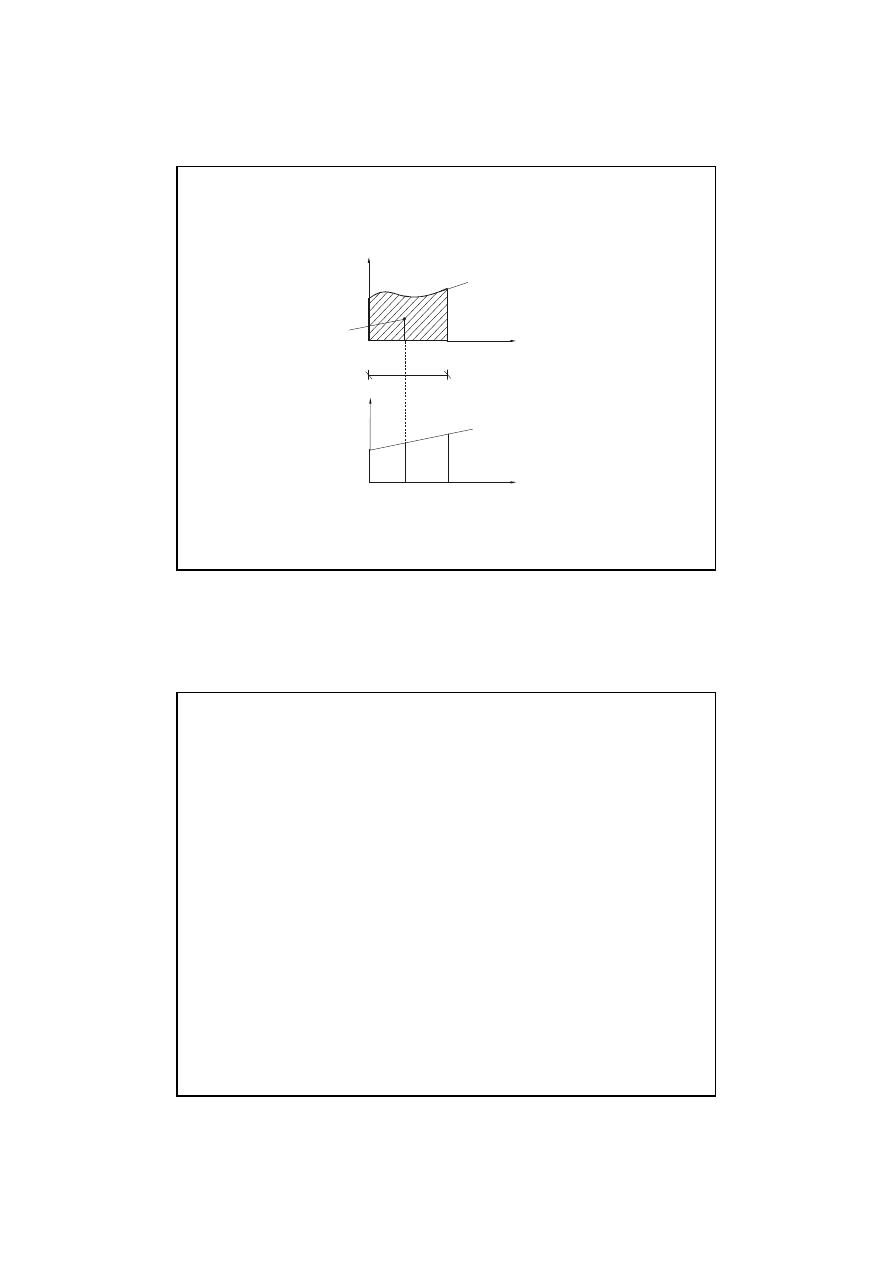
Obliczanie przemieszcze
ń
sprowadza si
ę
do obliczenia całki iloczynu dwóch funkcji.
Załó
ż
my,
ż
e jedna z funkcji f(x) jest liniowa, druga g(x) dowolna
l
x
x
0
ś
rodek
ci
ęż
ko
ś
ci
g(x)
funkcja
dowolna
g
x
x
0
f
ax +b
0
f(x)=ax+b
funkcja liniowa
38
Obliczenie całki iloczynu dwóch funkcji f(x) i g (x)
( ) ( )
x
f
x
g
K
l
⋅
=
∫
0
( )(
)
( )
( )
dx
x
g
b
xdx
x
g
a
dx
b
ax
x
g
K
l
l
l
∫
∫
∫
+
=
+
=
0
0
0
( )
g x dx
l
0
∫
( )
g x xdx
l
0
∫
0
x
F
S
⋅
=
(
)
b
ax
F
F
b
Fx
a
F
b
S
a
K
+
=
⋅
+
⋅
=
⋅
+
⋅
=
0
0
(
)
b
ax
F
K
+
=
0
- pole powierzchni zakreskowanej figury F
- moment statyczny pola zakreskowanej figury S
gdzie:
F – pole powierzchni wykresu krzywoliniowego
ax
0
+ b – rz
ę
dna pod
ś
rodkiem ci
ęż
ko
ś
ci tego pola ale w wykresie prostoliniowym
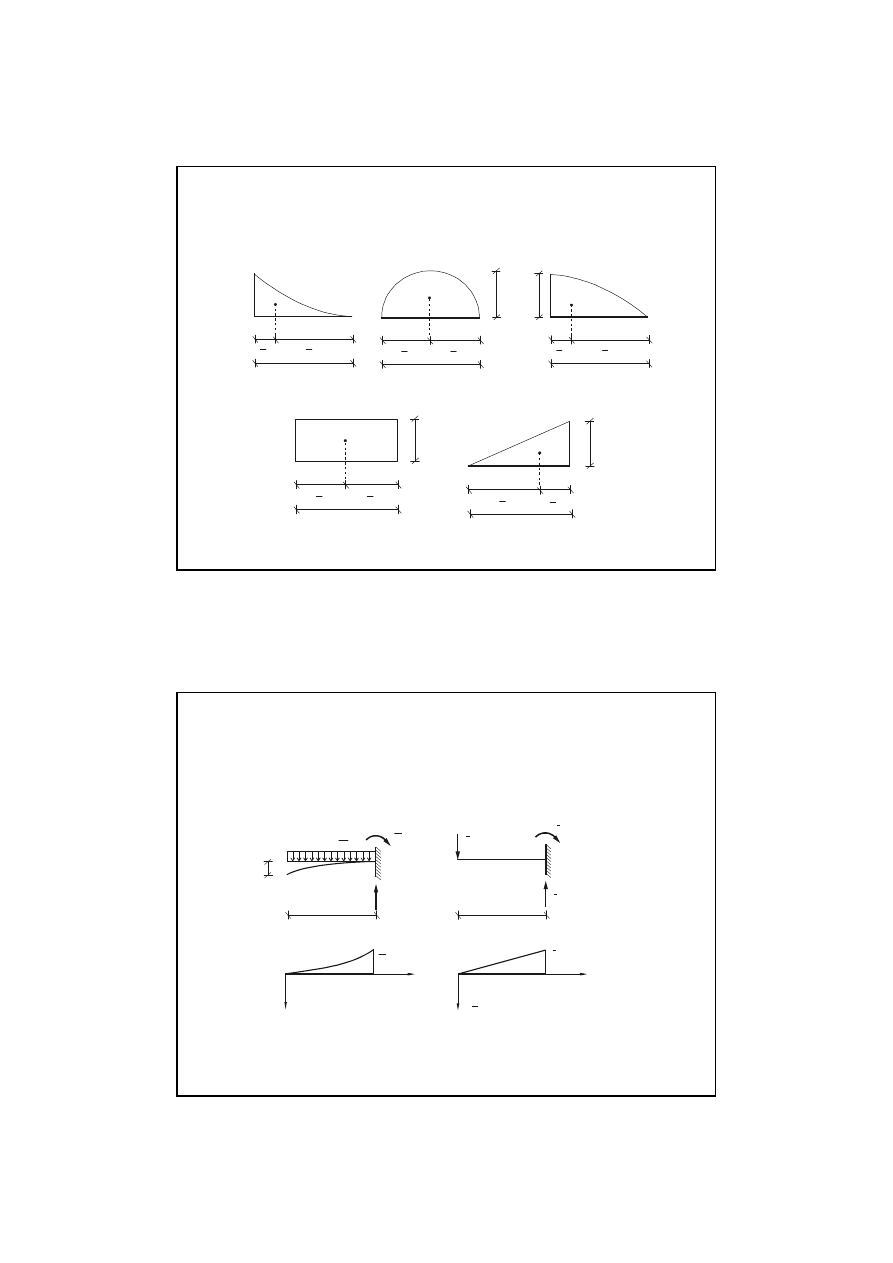
39
Typowe wykresy momentów zginaj
ą
cych z zaznaczonymi
ś
rodkami ci
ęż
ko
ś
ci pola
a
C
1
4
l
3
4
l
l
a
C
3
8
l
5
8
l
l
C
1
2
l
1
2
l
l
a
Wykres 1
Wykres 2
Wykres 3
C
1
3
l
2
3
l
C
1
2
l
1
2
l
l
l
a
a
Wykres 4
Wykres 5
40
Przykład 2
Dla belki wspornikowej opisanej w przykładzie 1 obliczy
ć
ponownie przemieszczenie
pionowe ko
ń
ca wspornika w
A
stosuj
ą
c metod
ę
mno
ż
enia wykresów
Stan rzeczywisty
Stan wirtualny
w
A
p kN
m
[
[
l
l
pl [kN]
pl
2
2
[kNm]
1
1
1l
pl
2
2
M(x)
x
M(x)
1l
x
Wykres momentów zginaj
ą
cych
od obci
ąż
enia wirtualnego
Wykres momentów zginaj
ą
cych od
obci
ąż
enia rzeczywistego
41
dx
EJ
x
M
x
M
w
l
A
∫
⋅
=
⋅
0
)
(
)
(
1
EJ
w
A
1
1
=
⋅
l
l
pl
2
2
1
1l
3
4
1
4
C
3
4
l
⋅
⋅
⋅
⋅
⋅
=
⋅
1
4
3
2
3
1
1
1
2
l
l
pl
EJ
w
A
w
EJ
pl
l
l
w
pl
EJ
A
A
=
⋅
⋅ ⋅
=
1
1
3 2
3
4
8
2
4
rz
ę
dna pod
ś
rodkiem
ci
ęż
ko
ś
ci wykresu
prostoliniowego
pole powierzchni
wykresu
krzywoliniowego
Wyszukiwarka
Podobne podstrony:
mechanika budowli nr1 id 290806 Nieznany
FIZYKA BUDOWLI wyklad2 id 91544 Nieznany
Badania operacyjne wyklad 2 id Nieznany
historia gospodarcza wyklady id Nieznany
Derma dermatologia wyklad8 id 6 Nieznany
Audyt 2012 zaoczne wyklad 4 id Nieznany (2)
Encyklopedia prawa wyklady id 1 Nieznany
Audyt 2012 zaoczne wyklad 1 id Nieznany
materialy do wykladow 1 i 2 id Nieznany
nauka administracji wyklady id Nieznany
podstawy zarzadzania wyklady id Nieznany
mechanika plynow wyklad sciaga Nieznany
Audyt 2012 zaoczne wyklad 2 id Nieznany
7191253 Automatyka wyklady id 4 Nieznany
Dynamika Budowli wyklad 2 2011 Nieznany
Audyt 2012 zaoczne wyklad 3 id Nieznany (2)
1-40, budownictwo, V semestr, Mechanika Budowli, Wykłady
MECHANIAK BUDOWLI wyklad7d
więcej podobnych podstron