
Maria Kotełko
Mechanika
i Wytrzymało
ść
Materiałów
————————————————————————————————————————
Zadanie nr 32 - Dostosowanie kierunku Automatyka i Robotyka
do prowadzenia studiów niestacjonarnych
2
Mechanika i …
Wykład 5.
1. Przestrzenny układ sił zbieżnych
2. Dowolny przestrzenny układ sił
3. Redukcja dowolnego przestrzennego
układu sił
4. Moment siły względem osi
5. Warunki równowagi dowolnego
przestrzennego układu sił
3
Mechanika i …
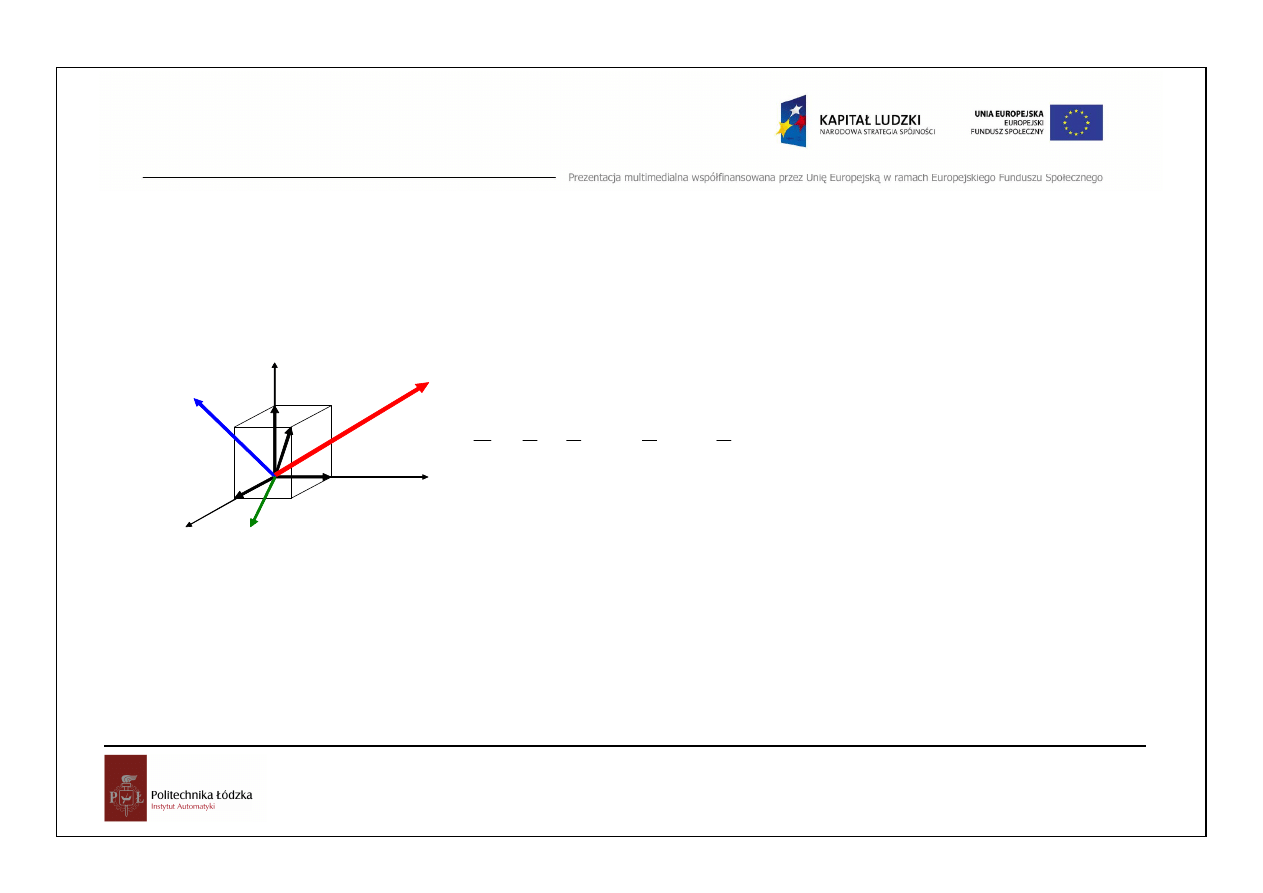
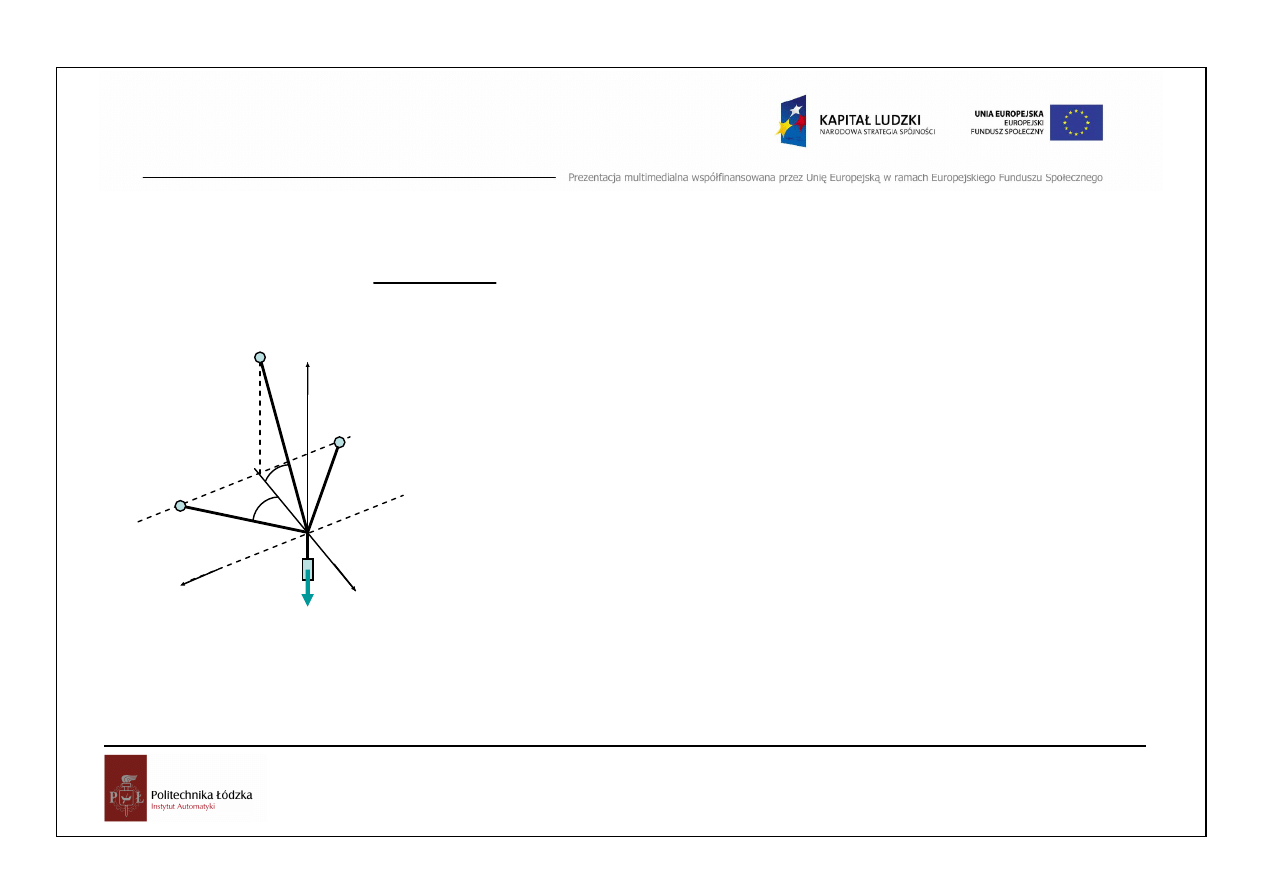
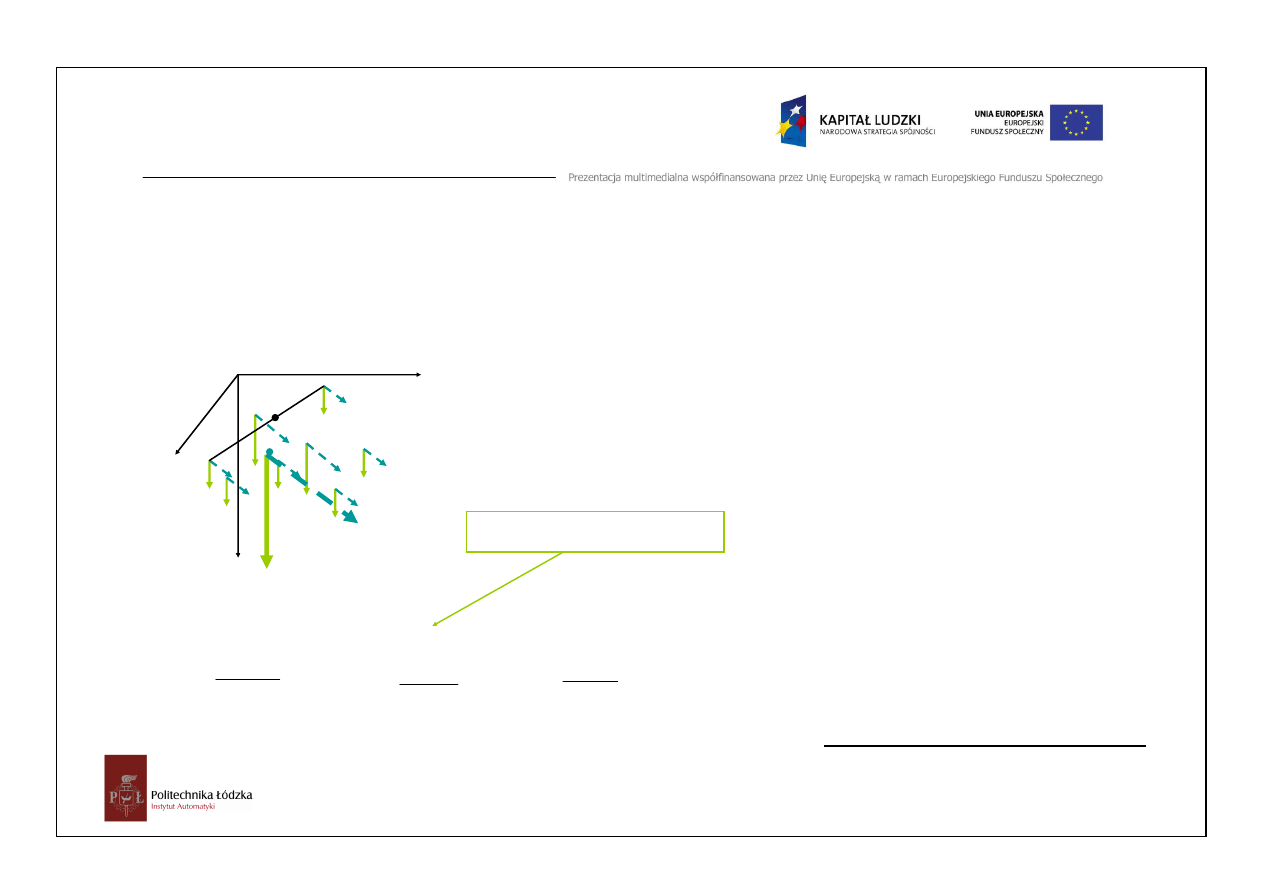
Przestrzenny układ sił zbie
ż
nych
P
i
P
ix
P
iz
P
iy
z
x
y
P
1
R
P
3
R
P
P
P
P
n
i
i
n
= + + + =
=
∑
1
2
1
...
.
Dowolny układ sił przy łożony ch do jednego punktu
zastąp ić możemy jedną siłą wypadkową, przy łożoną w
tymże p unkcie i równą sumie geometrycznej
poszczególnych sił.
Wypadkową tę można wyznaczyć wykorzystując
zasadę równoległościanu
, analogiczną do zasady
równoległoboku.
4
Mechanika i …
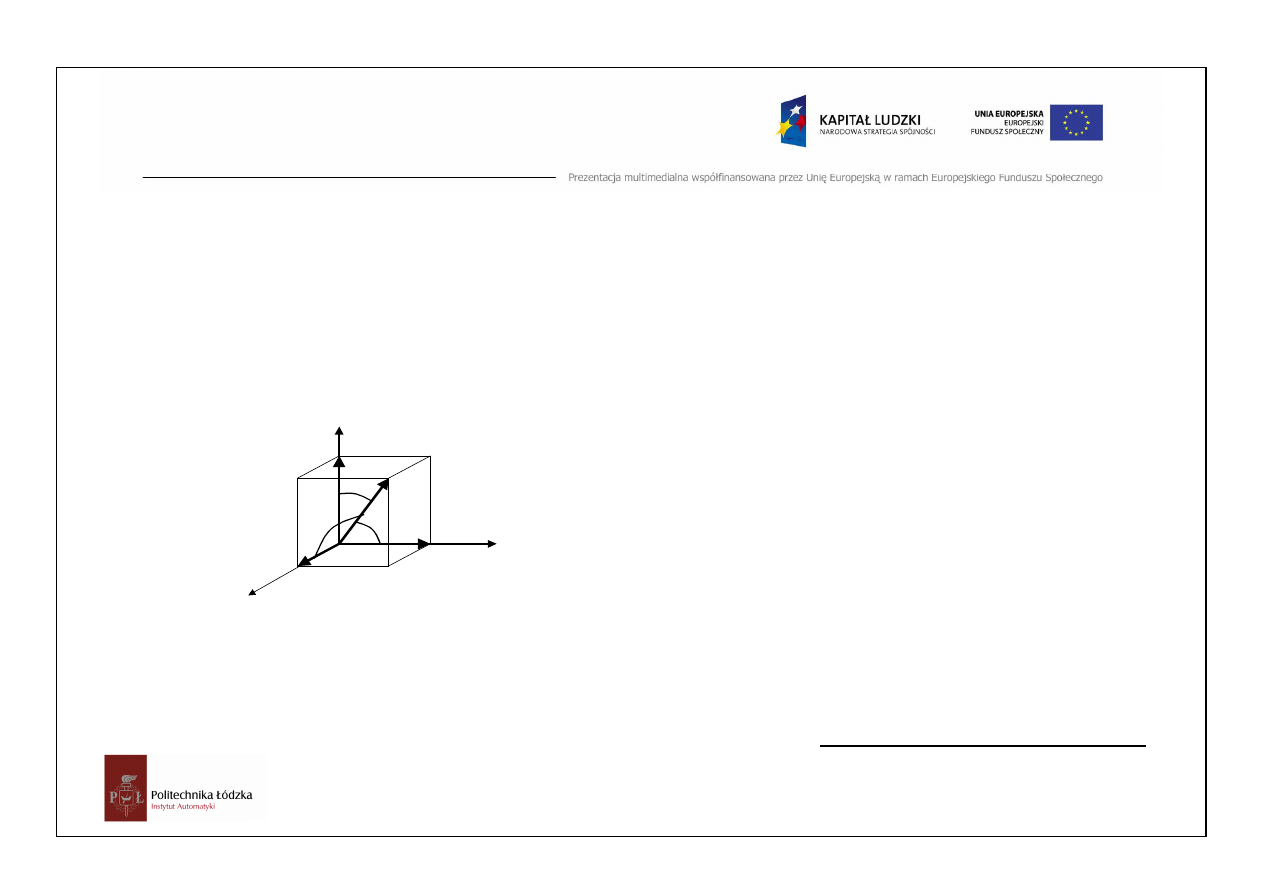
Zasady rzutowania w przestrzeni
P
i
P
ix
P
iz
P
iy
z
x
y
α
αα
α
i
ββββ
i
γγγγ
i
i
i
ix
P
P
α
cos
⋅
=
,
i
i
iy
P
P
β
cos
⋅
=
,
i
i
iz
P
P
γ
cos
⋅
=
5
Mechanika i …
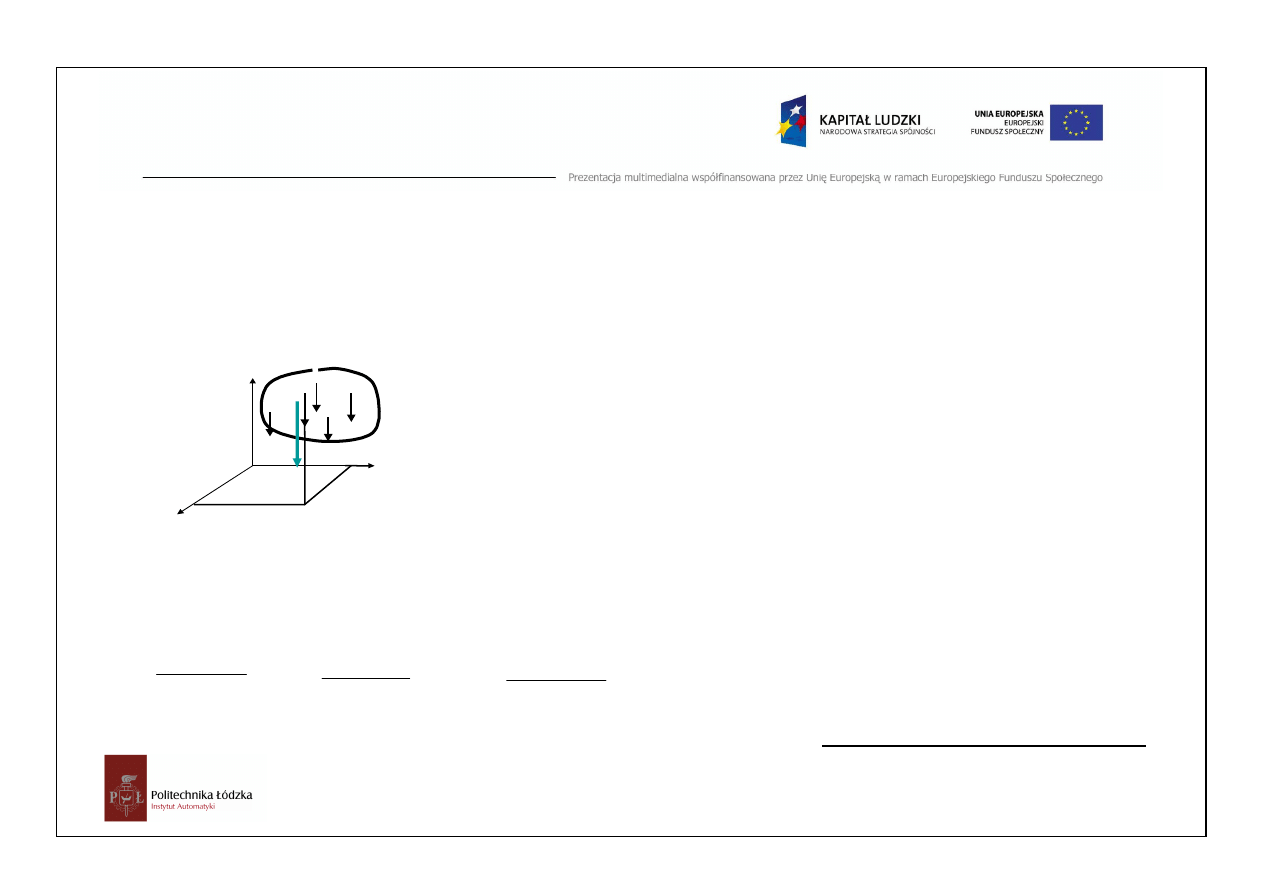
Warunek równowagi przestrzennego układu sił
zbie
ż
nych
P
P
P
P
n
i
i
n
1
2
1
0
+ + + =
=
=
∑
...
Wypadkowa przestrzennego zbieżnego układu sił musi być równa zeru, tj
musi tworzyć zamknięty wielobok sił w przestrzeni.
P
P
ix
i
n
iy
i
n
=
=
∑
∑
=
=
1
1
0
0
P
iz
i
n
=
∑
=
1
0
Warunki równowagi w postaci analitycznej:
6
Mechanika i …
Przykład
Ciało o ciężarze G zawieszone jest na
wsporniku zbudowanym z trzech
prętów.
Znaleść siły w prętach.
Ciężary własne ominąć.
Dane: G,
α,β
x
y
z
α
β
G
7
Mechanika i …
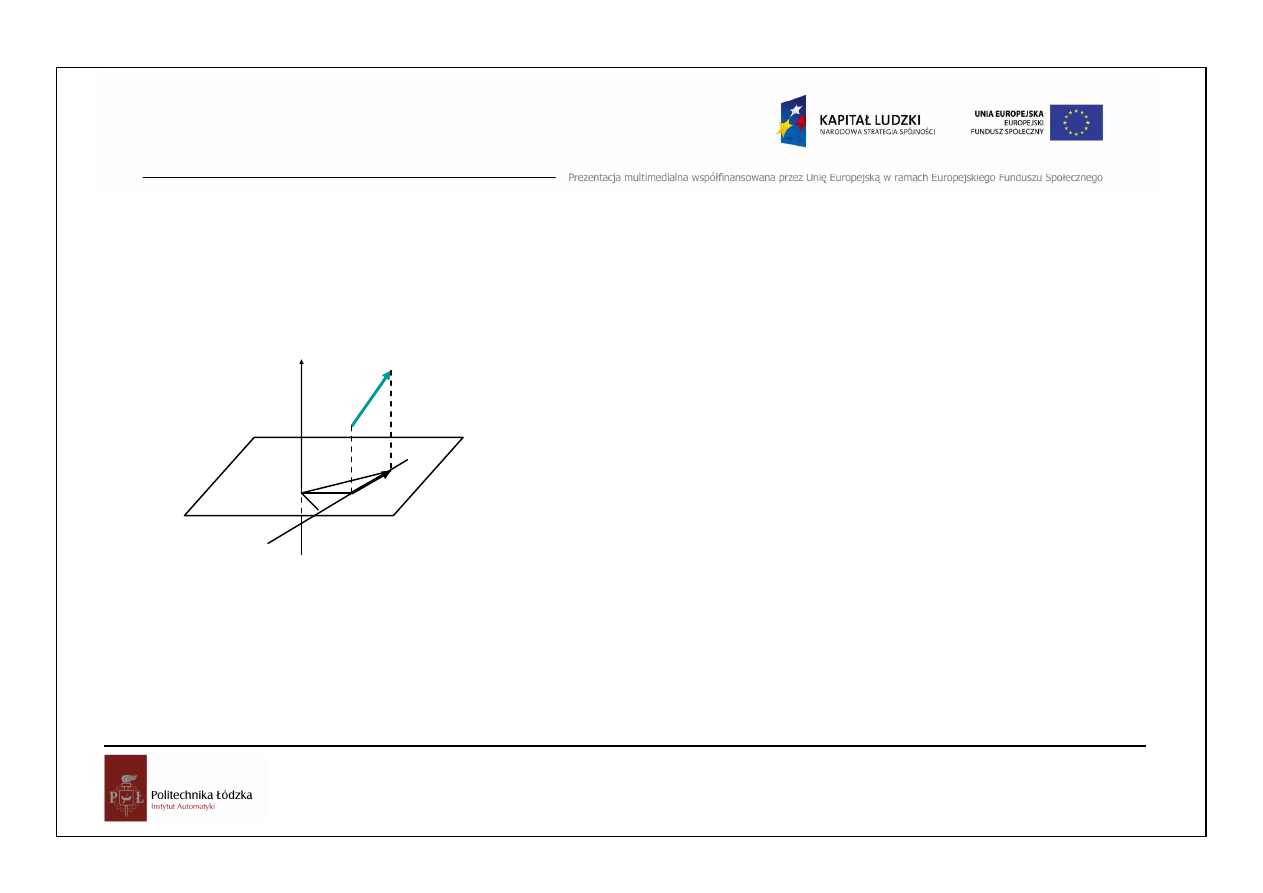
Moment siły wzgl
ę
dem osi
M omentem siły P względem osi z nazywamy moment
rzutu P na p łaszczyznę względem punktu O.
M
P h
P h
F
z
OA B
= ′ ′
′ ′ =
′
2
'
O
P
P’
h’
z
8
Mechanika i …
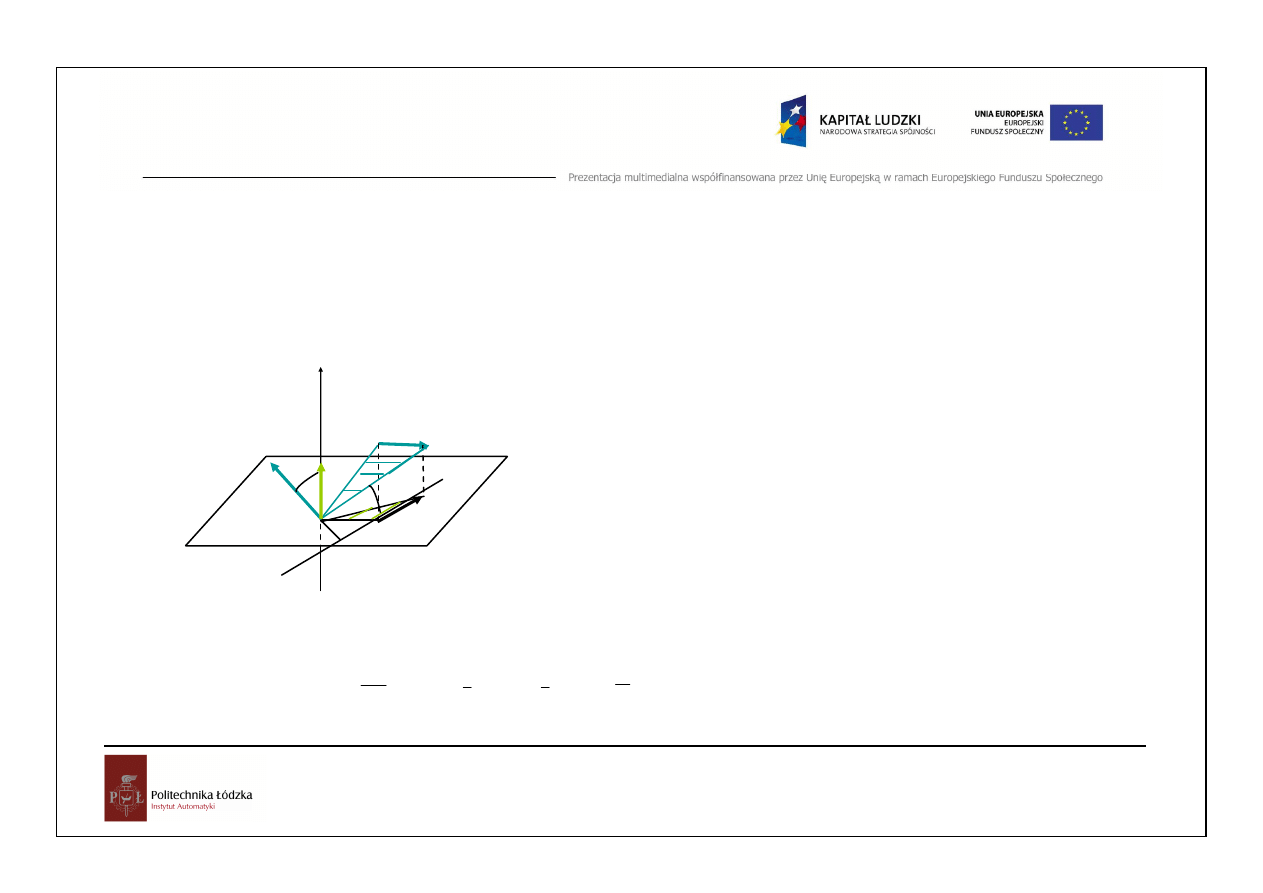
Moment siły wzgl
ę
dem osi
O
P
P’
h’
z
α
α
M oment siły względem osi równa się rzutowi na tę oś
momentu danej siły względem dowolnego punktu leżącego
na tejże osi. Stąd wynika zależność:
M
z
Mo
M
M i
M j
M k
o
x
y
z
=
+
+
9
Mechanika i …
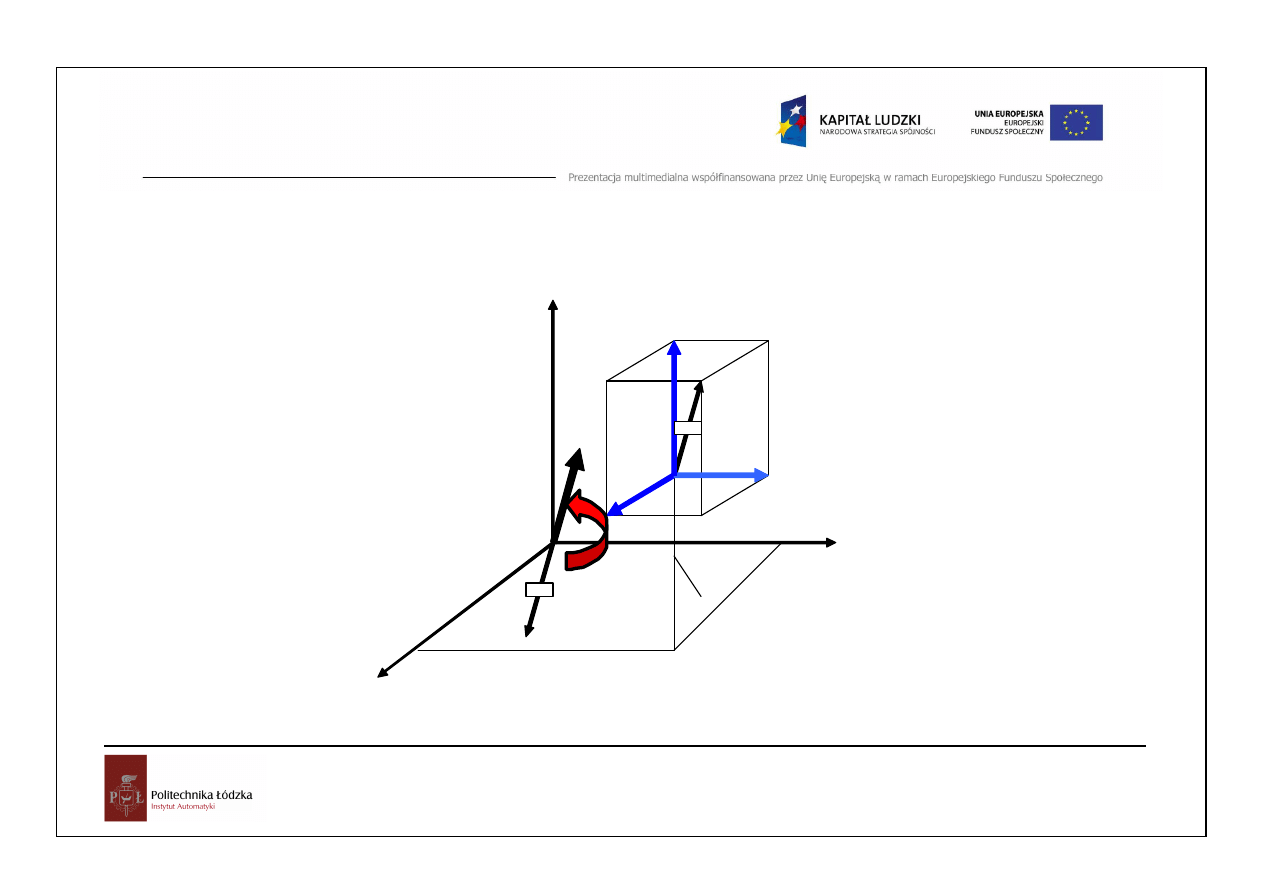
Redukcja wektora głównego R do pocz
ą
tku układu współrz
ę
dnych
R
i
R
ix
R
iz
R
iy
-R
i
M
i
z
x
y
x
i
y
i
z
i
R
i
O
10
Mechanika i …
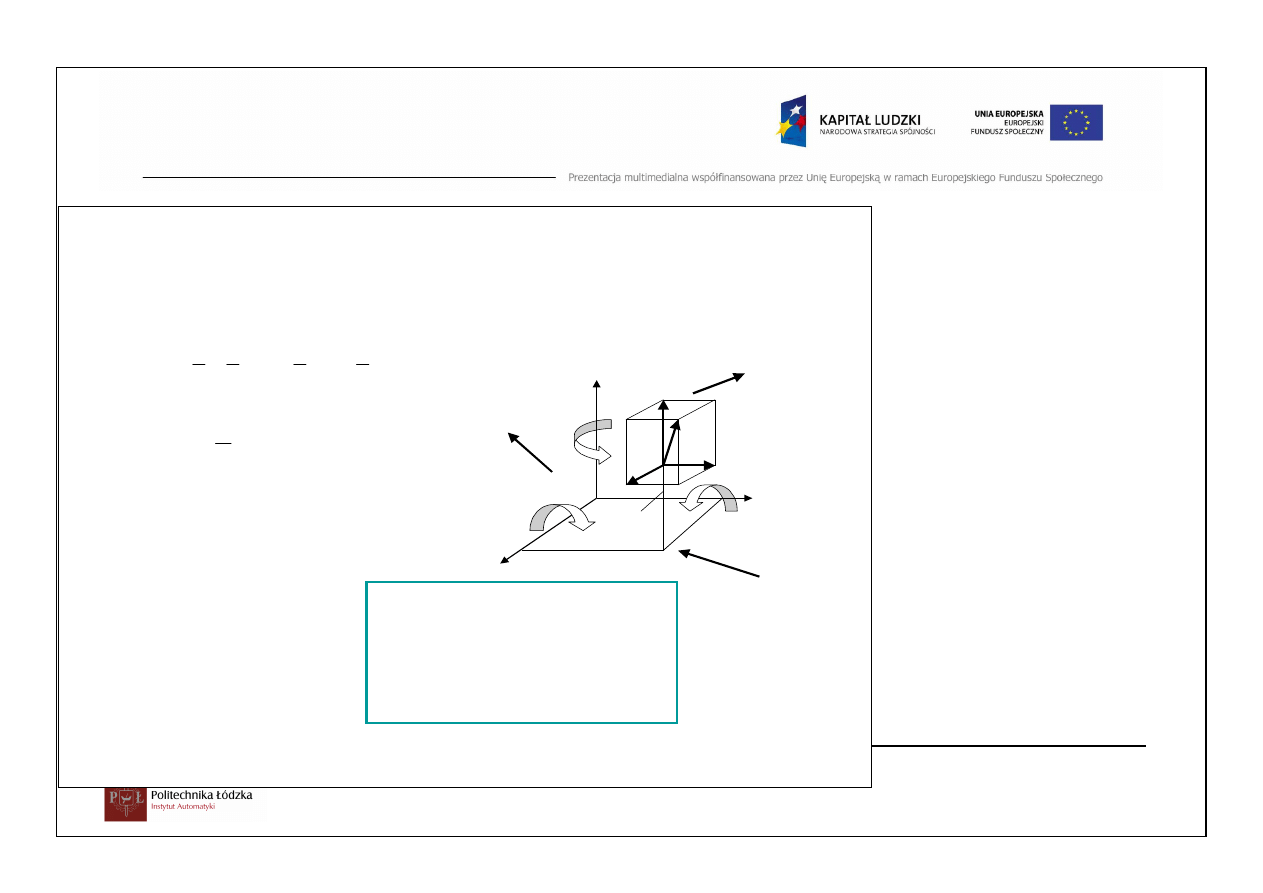
Dowolny przestrzenny układ sił - warunki
równowagi
0
...
1
2
1
=
=
+
+
+
∑
=
n
i
i
n
P
P
P
P
M
iy
P
i
P
ix
P
iz
P
iy
M
iz
M
ix
z
x
y
x
i
y
i
z
i
P
1
P
2
P
n
∑
=
=
n
i
ix
P
1
0
∑
=
=
n
i
iy
P
1
0
∑
=
=
n
i
iz
P
1
0
(10. 6)
0
1
=
∑
=
n
i
ix
M
0
1
=
∑
=
n
i
iy
M
0
1
=
∑
=
n
i
iz
M
0
1
=
∑
=
n
i
io
M
11
Mechanika i …
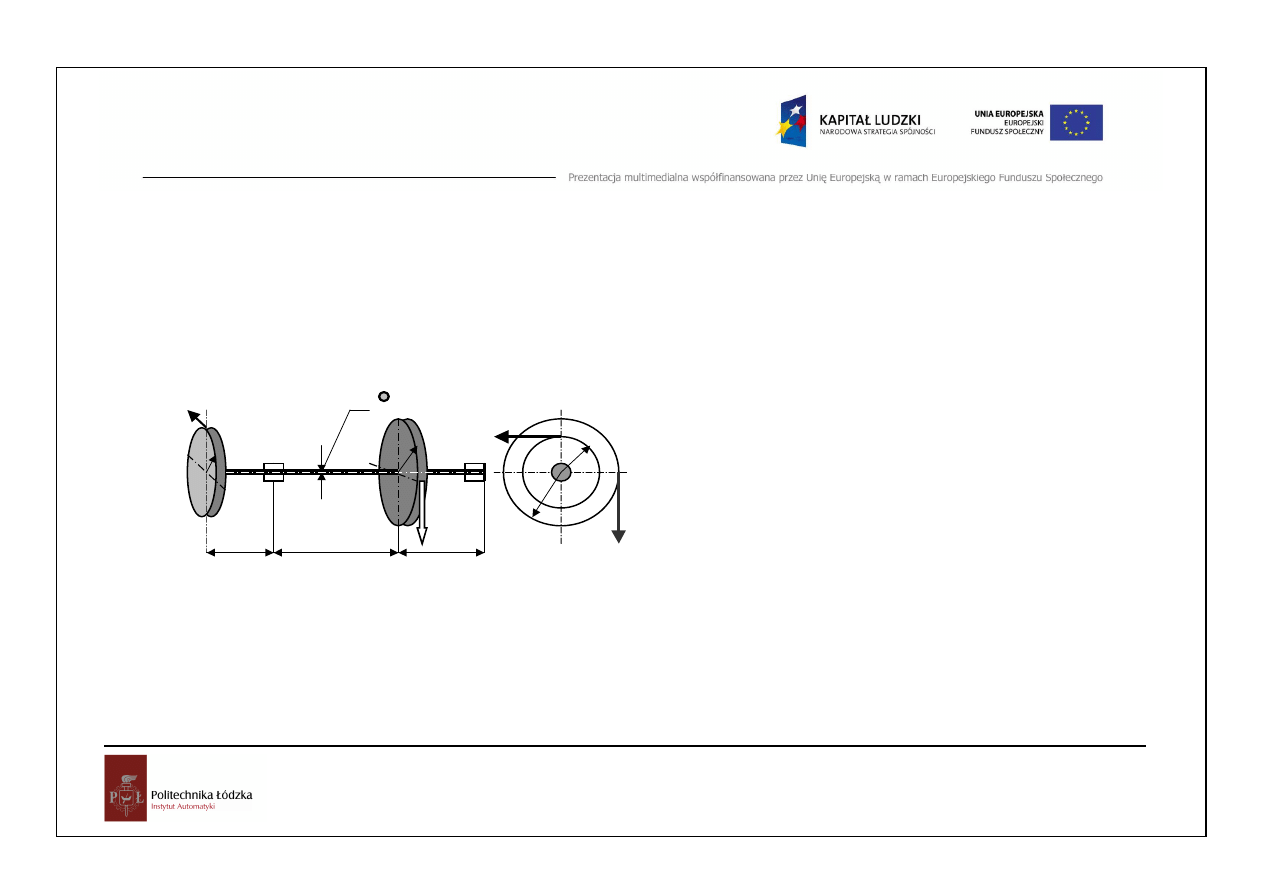
Przykład
2l
P
S
l
2R
A
B
R
l
S
R
P
2R
φ
d
12
Mechanika i …
Wykład 5.
1. Środek sił równoległych
2. Środek ciężkości
3. Metody wyznaczania środków ciężkości
4. Środki ciężkości wybranych linii, figur
płaskich i brył
5. Twierdzenia Pappusa-Guldina
13
Mechanika i …
Przestrzenny układ sił równoległych
Układ sił w przestrzeni, których linie
działania są równoległe nazywamy
układem
sił
równoległych.
Przykładami takich układów sił mogą
być siły
masowe, powierzchniowe,
elektromagnetyczne.
P
1
P
2
P
n
14
Mechanika i …
Ś
rodek sił równoległych
∑
∑
=
=
⋅
=
n
i
i
n
i
i
i
c
P
y
P
y
1
1
A
2
Punk C mający tę własność,
że przechodzi przez niego stale
wypadkowa układu sił równoległych
niezależnie od kierunku tych sił
(przy ich niezmiennych wartościach i
punktach przyłożenia) nazywamy
środkiem sił równoległych
.
P
1
P
2
P
n
A
1
An
C
R
C
1
Współrzędne środka sił równoległych
:
∑
∑
=
=
⋅
=
n
i
i
n
i
i
i
c
P
x
P
x
1
1
∑
∑
=
=
⋅
=
n
i
i
n
i
i
i
c
P
z
P
z
1
1
0
1
=
∑
=
n
i
ix
M
0
1
=
∑
=
n
i
iy
M
0
1
=
∑
=
n
i
iz
M
15
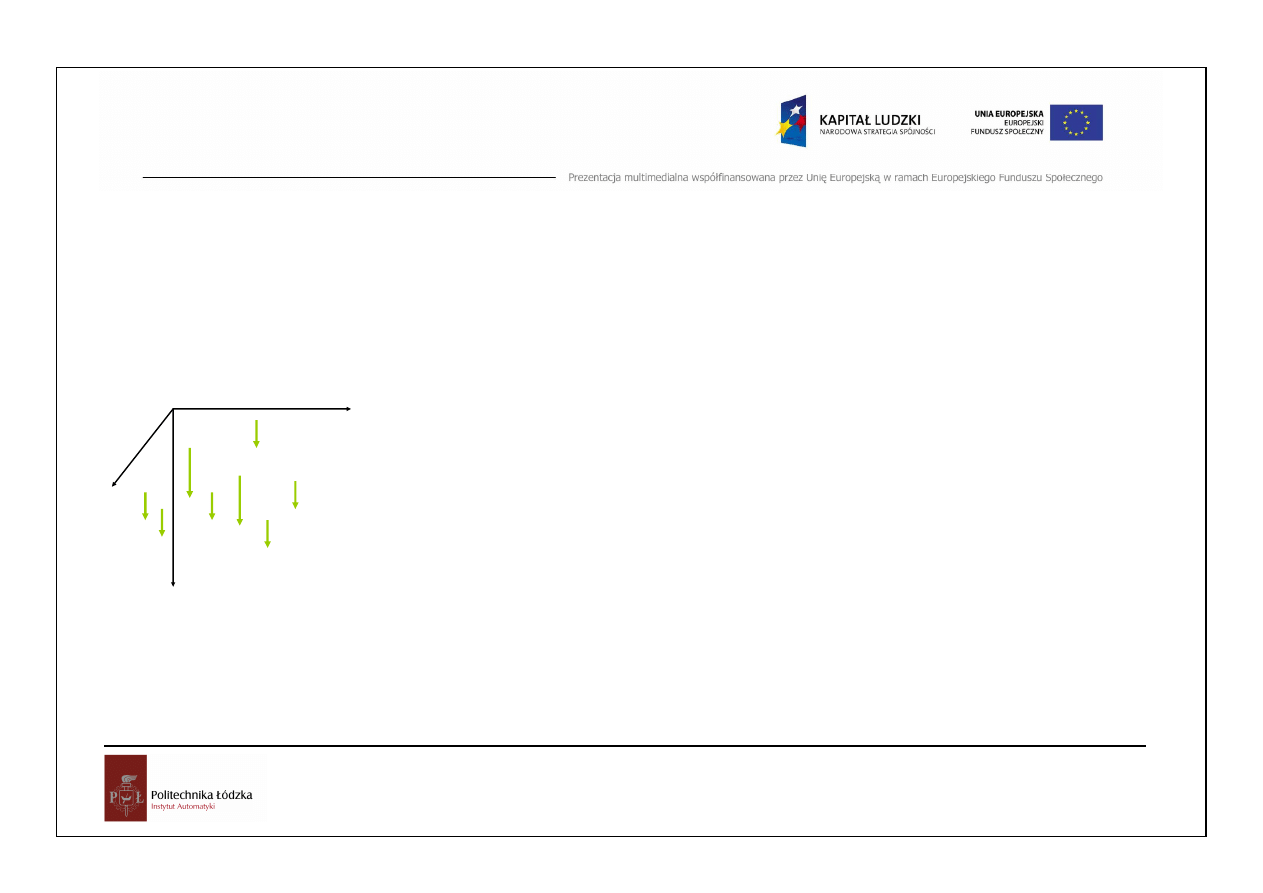
Mechanika i …
Ś
rodek ci
ęż
ko
ś
ci
iy
∆
G
1
∆
G
2
∆
G
i
∆
G
n
iz
z
x
y
x
i
y
i
z
i
∆
G
3
G
Ciężar możemy przedstawić jako iloczyn ciężaru właściwego
γγγγ
i
pomnożonego przez objętość -
∆
Gi=
∆∆∆∆
Vi
⋅γ
⋅γ
⋅γ
⋅γ
i (lub masę jako iloczyn
masy
właści wej
i
obję tości)
zatem
po
uproszczeniu
otrzymujemy:
V
x
V
x
n
i
i
i
i
c
∑
=
⋅
∆
=
1
γ
V
y
V
y
n
i
i
i
i
c
∑
=
⋅
∆
=
1
γ
V
z
V
z
n
i
i
i
i
c
∑
=
⋅
∆
=
1
γ
16
Mechanika i …
Współrz
ę
dne
ś
rodka ci
ęż
ko
ś
ci
V
x
V
x
i
n
i
i
i
i
c
γ
γ
∑
=
⋅
∆
=
1
V
y
V
y
i
n
i
i
i
i
c
γ
γ
∑
=
⋅
∆
=
1
V
z
V
z
i
n
i
i
i
i
c
γ
γ
∑
=
⋅
∆
=
1
Przechodząc do granicy przy
∆
Vi → 0
oraz zakładając
γ
i
= const.
otrzymujemy
:
V
xdV
x
V
c
∫
=
V
ydV
y
V
c
∫
=
V
zdV
z
V
c
∫
=
17
Mechanika i …
Współrz
ę
dne
ś
rodka ci
ęż
ko
ś
ci
V
xdV
x
V
c
∫
=
V
ydV
y
V
c
∫
=
V
zdV
z
V
c
∫
=
Bryły:
Analogicznie, figury płaskiej:
F
xdF
x
F
c
∫
=
F
ydF
y
F
c
∫
=
Linii:
l
xdl
x
l
c
∫
=
l
ydl
y
l
c
∫
=
l
zdl
z
l
c
∫
=
18
Mechanika i …
Metody wyznaczania
ś
rodków ci
ęż
ko
ś
ci
•Jeżeli ciało materialne posiada płaszczyznę , oś lub środek symetrii, to środek
ciężkości leży
odpowiednio w tej płaszczyźnie, na tej osi lub pokrywa się ze środkiem symetrii.
• Ciało materialne możemy podzielić myślowo na części, dla których położenia
ś
rodków ciężkości są znane , następnie zastosować następujące wzory:
- dla bryły
- dla figury płaskiej
- dla linii
V
x
V
x
n
i
i
i
c
∑
=
⋅
=
1
V
y
V
y
n
i
i
i
c
∑
=
⋅
=
1
V
z
V
z
n
i
i
i
c
∑
=
⋅
=
1
∑
∑
=
=
⋅
=
n
i
i
n
i
i
i
c
F
x
F
x
1
1
∑
∑
=
=
⋅
=
n
i
i
n
i
i
i
c
F
y
F
y
1
1
∑
∑
∑
∑
∑
∑
=
=
=
=
=
=
⋅
=
⋅
=
⋅
=
n
i
i
n
i
i
i
c
n
i
i
n
i
i
i
c
n
i
i
n
i
i
i
c
L
z
L
z
L
y
L
y
L
x
L
x
1
1
1
1
1
1
;
;
19
Mechanika i …
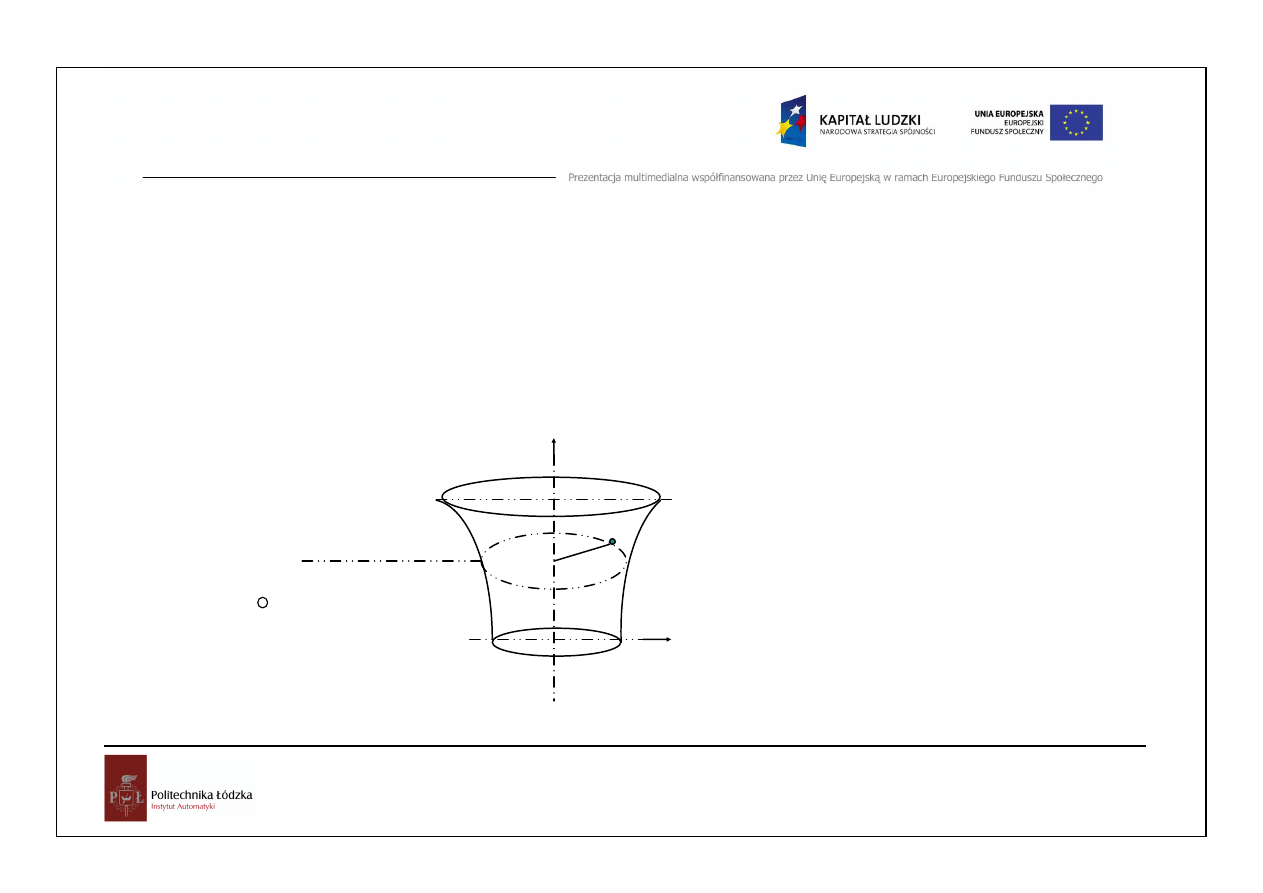
Twierdzenia Pappusa-Guldina
x
c
C
x
I.
Twierdzenie: Pole powierzchni obrotowej, powstałe wskutek
obrotu płaskiej linii wokół osi leżącej w jej płaszczyźnie równe jest
długości tej linii pomnożonej przez długość okręgu, który opisuje jej środek ciężkości
y
A
B
AB
c
l
x
xdl
F
⋅
⋅
=
=
∫
π
π
2
2
20
Mechanika i …
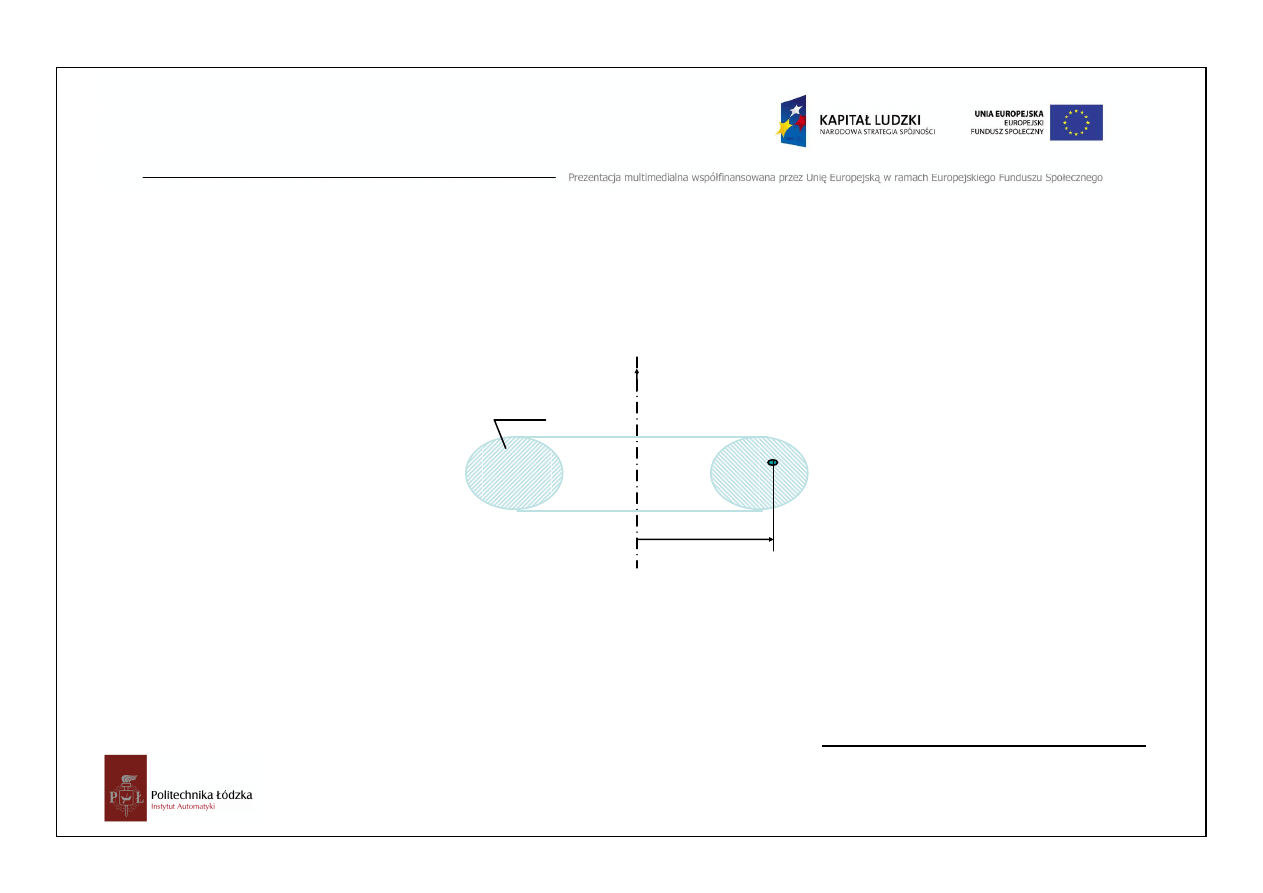
Twierdzenia Pappusa-Guldina
C
x
c
II.
Twierdzenie: Objętość bryły obrotowej,
powstałej wskutek obrotu figury
płaskiej wokół osi leżącej w jej
płaszczyźnie
i nie przecinającej tej figury, równa jest
polu powierzchni tej figury pomnożonemu
przez długość okręgu, który opisuje jej
ś
rodek ciężkości.
F
x
xdF
V
c
F
⋅
⋅
=
=
∫
π
π
2
2
F
Wyszukiwarka
Podobne podstrony:
kotelko 1 2 M1 2 id 248905 Nieznany
M5 id 275251 Nieznany
kotelko 4 M4 id 248909 Nieznany
m5 2 id 275257 Nieznany
kotelko 3 M3 id 248908 Nieznany
kotelko 10 WM 5 id 248906 Nieznany
M5 od chl id 275260 Nieznany
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
Mbaku id 289860 Nieznany
Probiotyki antybiotyki id 66316 Nieznany
miedziowanie cz 2 id 113259 Nieznany
LTC1729 id 273494 Nieznany
D11B7AOver0400 id 130434 Nieznany
więcej podobnych podstron