Statyka jako dział mechaniki ogólnej wykorzystuje następujące zasady
(aksjomaty), których się nie udowadnia, a przyjmuje jako pewniki.
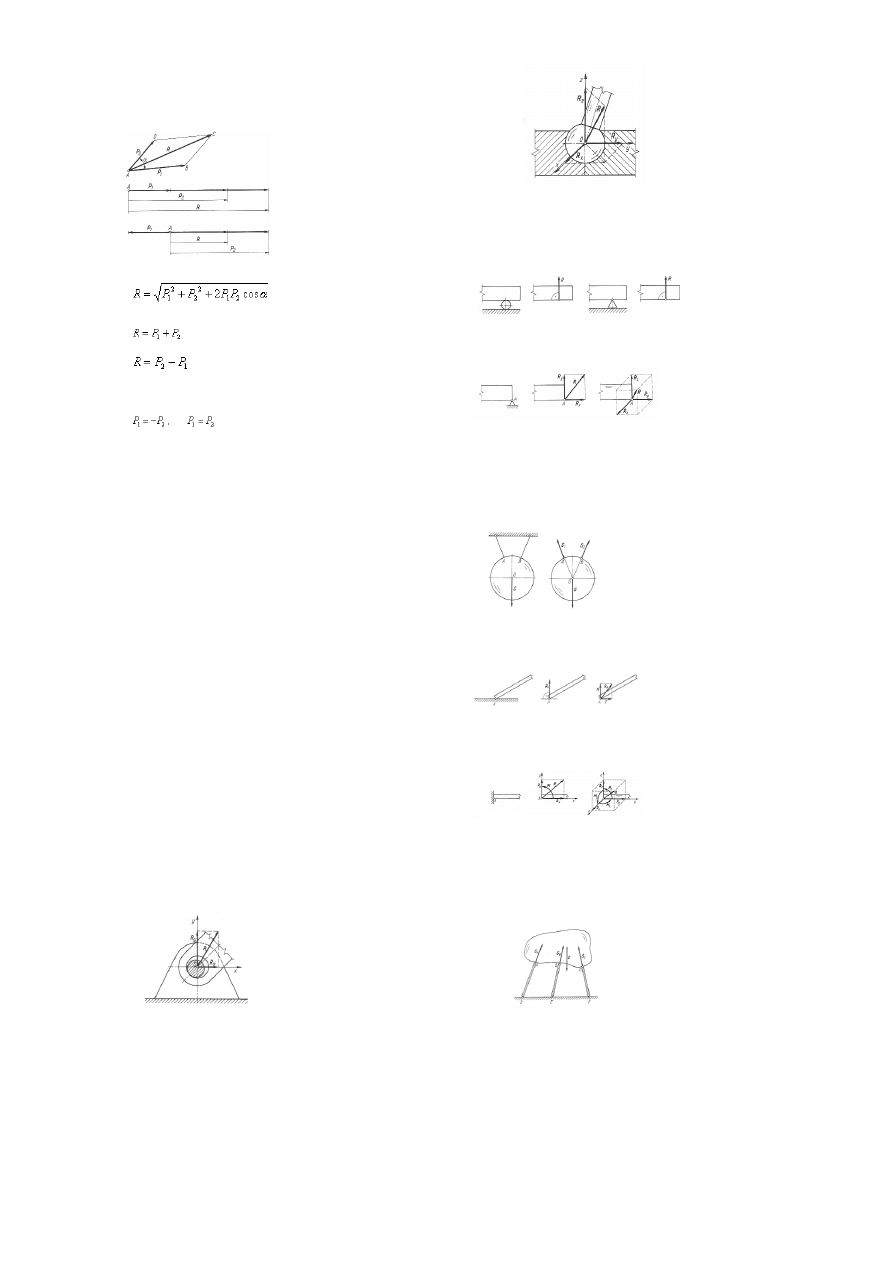
Zasada pierwsza (zasada równoległoboku). Działanie dwóch sił P
1
i P
2
można zastąpić działaniem jednej siły R, działającej na ten sam punkt,
będącej przekątną równoległoboku ABCD zbudowanego na wektorach sił P
1
i
P
2
.
Wypadkową R wyznaczamy ze wzoru
W przypadku, gdy siły P
1
i P
2
działają wzdłuż jednej prostej i są zgodnie
skierowane, wartość wypadkowej wynosi
Natomiast, gdy siły są przeciwnie skierowane i P
2
=P
1
, to
Zasada druga.
Jeżeli do ciała przyłożone są dwie siły, to równoważą się one
tylko w
tedy, gdy mają tę samą linię działania, te same wartości liczbowe i
przeciwne zwroty. Aby siły te równoważyły się, muszą być spełnione
zależności
Zasada trzecia.
Skutek działania dowolnego układu sił przyłożonego do
ciała nie zmieni się, jeśli do tego układu dodamy lub odejmiemy dowolny
układ równoważących się sił, czyli tzw. układ zerowy. Wynika stąd
następujący wniosek: każdą siłę działającą na ciało sztywne można
przesunąć dowolnie wzdłuż jej linii działania.
Zasada czwarta (zasada zesztywnienia).
Jeżeli ciało odkształcalne
znajduje się w równowadze pod działaniem pewnego układu sił, to również
pozostanie w równowadze ciało doskonale sztywne (nieodkształcalne),
identyczne z poprzednim, pod działaniem tego samego układu sił. Wynika
stąd wniosek, że warunek konieczny i wystarczający do równowagi ciała
sztywnego jest tylko warunkiem koniecznym, ale nie wystarczającym do
równowagi ciała odkształcalnego.
Zasada piąta (zasada działania i przeciwdziałania). Każdemu działaniu
towarzyszy równe co do wartości, o przeciwnym zwrocie i leżące na tej samej
prostej przeciwdziałanie.
Zasada szósta (zasada oswobodzenia od więzów). Każde ciało
nieswobodne można myślowo oswobodzić z więzów, zastępując ich działanie
reakcjami, a następnie rozważać jako ciało swobodne znajdujące się pod
działaniem sił czynnych i biernych (reakcji więzów).
S
TOPNIE SWOBODY WIĘZY I ICH ODDZIAŁYWANIE
Każde ciało doskonale sztywne mogące poruszać się w przestrzeni
nazywamy
ciałem swobodnym.
Stopniem swobody
nazywa się możliwość wykonania ruchu ciała
niezależnego od innych ruchów.
Punkt materialny
ma na płaszczyźnie dwa, a w przestrzeni trzy stopnie
swobody.
Ciało doskonale sztywne ma na płaszczyźnie trzy, a w przestrzeni sześć
stopni swobody.
Trzy stopnie swobody ciała sztywnego na płaszczyźnie oznaczają możliwość
dwóch przesunięć niezależnych w kierunku osi x i y oraz możliwość obrotu
ciała w płaszczyźnie Oxy. Sześć stopni swobody ciała w przestrzeni oznaczają
możliwość trzech niezależnych przesunięć w kierunku osi x, y i z oraz
możliwość niezależnego obrotu ciała wokół tych osi. Więzami nazywamy
warunki ograniczające ruch ciała w przestrzeni.
Wprowadzenie więzów jest równoznaczne z działaniem na ciało sił biernych,
czyli reakcji. Najczęstszymi sposobami podparcia ciał sztywnych są: przegub
walcowy, przegub kulisty, podpora przegubowa stała, zawieszenie na
cięgnach wiotkich, oparcie o gładką i chropowatą powierzchnię, utwierdzenie
całkowite, podparcie na prętach zamocowanych przegubowo na obu końcach.
Przegub walcowy.
Ciało sztywne jest osadzone na walcowym sworzniu przechodzącym przez
kołowy otwór wykonany w tym ciele. Po pominięciu siły tarcia jako małej w
porównaniu z siłą normalną R do powierzchni styku linia działania tej reakcji
będzie przechodziła przez oś sworznia. Występujące dwie reakcje R
x
i R
y
stanowią dwie niewiadome i umożliwiają wyznaczenie wartości reakcji R i jej
kierunku.
Przegub kulisty.
W celu unieruchomienia punktu podparcia w przestrzeni stosuje się przeguby
kuliste, które krępują swobodę przesunięć, ale umożliwiają obrót wokół
dowolnej osi. Ich zakończenie jest wykonane w kształcie kuli, która jest
osadzona w łożysku kulistym. W wyniku pominięcia sił tarcia w przegubie
kulistym powstaje reakcja R o dowolnym kierunku w przestrzeni,
przechodząca przez środek kuli i mająca trzy niezależne składowe R
x
, R
y
i R
z
.
Podpora przegubowa przesuwna (rolkowa).
Ponieważ opór przy przesuwaniu takiej podpory w kierunku poziomym jest
bardzo mały, przyjmuje się, że linia działania reakcji jest prostopadła do
płaszczyzny poziomej (przesuwu).
Podpora przegubowa stała.
W przypadku zastosowania podpory przegubowej stałej koniec podparcia
ciała sztywnego może się obracać dookoła osi przegubu, ale nie może się
przemieszczać w dwóch kierunkach. Przy założeniu, że w przegubie nie ma
tarcia, linia działania reakcji R przechodzi przez punkt A. Powstają dwie
niezależne od siebie składowe reakcje R
x
iR
y
. Rozważając podporę
przegubową stałą w przestrzeni należy zauważyć, że koniec podparcia B nie
może się przemieszczać w trzech kierunkach i dlatego występują trzy
niezależne składowe reakcje R
x
, R
y
iR
z
.
Zawieszenie na cięgnach wiotkich.
Podwieszenie ciała za pomocą wiotkich cięgien stwarza tzw. podpory
kierunkowe jednost
ronne, bo cięgna mogą być tylko rozciągane. Reakcje S
1
i
S
2
działają na ciało wzdłuż tych cięgien, zgodnie z rysunkiem.
Oparcie o gładką i chropowatą powierzchnię.
W przypadku oparcia ciała o gładką powierzchnię (styk punktowy) występuje
jedna reakcja R
A
, prostopadła do powierzchni styku. Jeżeli powierzchnia
będzie chropowata, to wystąpią dwie składowe reakcji R
A
: normalna do
powierzchni N i styczna siła tarcia T.
Utwierdzenie całkowite.
Gdy chodzi o zupełne unieruchomienie ciała, wtedy stosuje się utwierdzenie
całkowite. Ciało sztywne na płaszczyźnie ma trzy stopnie swobody, a więc
wystąpi reakcja R o dwóch składowych R
x
i R
y
oraz moment utwierdzenia M.
Rozważając całkowite unieruchomienie ciała w przestrzeni, należy
zastosować takie utwierdzenie, które przedstawia sześć więzów. Wystąpi
wtedy reakcja R o trzech składowych R
x
, R
y
i R
z
oraz moment utwierdzenia M o
trzech składowych M
x
, M
y
i M
z
.
Ciało podparte na prętach zamocowanych przegubowo na obu końcach
(prętach przegubowych).
Ciało sztywne można także unieruchomić przez podparcie na prętach
zakończonych przegubami. Jeżeli pominiemy ciężary własne prętów i tarcie w
przegubach, to reakcje na ciało będą działać wzdłuż tych prętów S
A
, S
B
i S
C
,
zgodnie z rysunkiem.
ZBIEŻNY UKŁAD SIŁ
P
ŁASKI I PRZESTRZENNY UKŁAD SIŁ ZBIEŻNYCH
Układy sił, w których linie działania przecinają się w jednym punkcie
nazywamy
zbieżnymi układami sił. Takie układy mogą być płaskie lub
przestrzenne.
Płaski układ sił zbieżnych P
1
, P
2
,..., P
n
przyłożonych do punktu O można
zastąpić siłą wypadkową P równą sumie geometrycznej tych sił i przyłożoną
również w punkcie O.
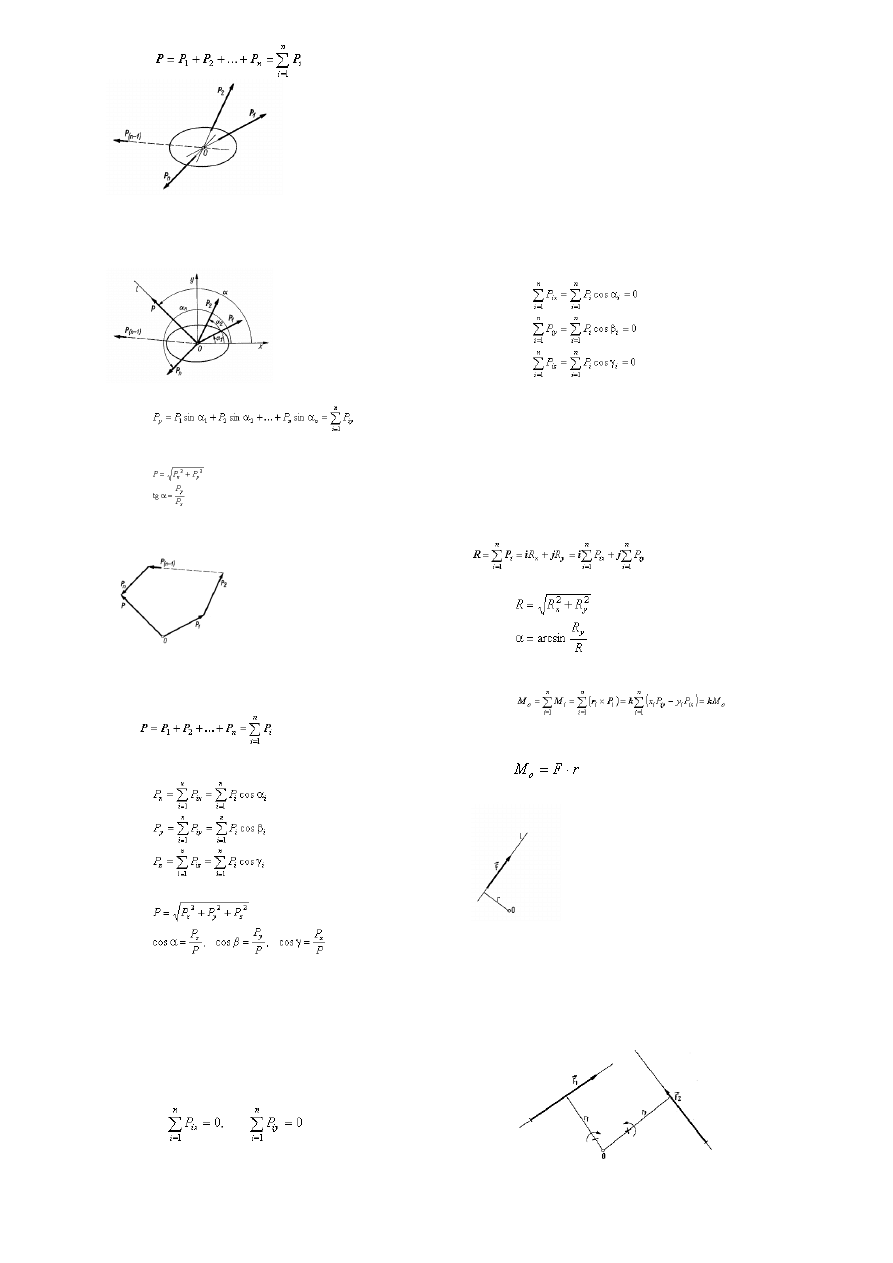
W analitycznym sposobie wyznaczania wypadkowej korzystamy z twierdzenia
o rzucie sumy wektorów, według którego rzut sumy geometrycznej wektorów
na dowolną oś jest równy sumie rzutów tych wektorów na tę samą oś.
Przyjmując układ współrzędnych Oxy, oznaczamy odpowiednio przez
1
,
2
,...,
n
kąty nachylenia poszczególnych sił do osi Ox. Wypadkowa tych sił
działa wzdłuż prostej l przechodzącej przez punkt O i nachylonej do osi Ox
pod kątem
.
Składowe wypadkowej P
x
i P
y
mają postać
Wartość liczbową wypadkowej P i kąt
, który tworzy ona z osią Ox,
wyznaczamy ze wzorów
W geometrycznym sposobie wyznaczania wypadkowej
należy zbudować
wielobok sił, w którym wektory sił odkładamy równolegle do ich linii działania.
Z punktu O odkładamy wektor P
1
, a z jego końca wektor P
2
i tak kolejne
wektory aż do P
n
.
Wektor poprowadzony z początku wektora P
1
do końca wektora P
n
jest
wypadkową rozpatrywanego układu sił zbieżnych.
Przestrzenny układ sił zbieżnych P
1
, P
2
,..., P
n
przyłożonych do punktu O
można zastąpić siłą wypadkową P równą sumie geometrycznej tych sił i
przyłożoną również w punkcie O
[
Analityczny sposób wyznaczenia wypadkowej przestrzennego układu sił
zbieżnych polega na wyznaczeniu składowych wypadkowej P
x
, P
y
i P
z
w
prostokątnym układzie współrzędnych Oxyz
Wartość liczbową wypadkowej P oraz jej cosinusy kierunkowe wyznaczamy
ze wzorów
W geometrycznym sposobie wyznaczania wypadkowej
należy zbudować
wielobok sił, w którym wektory sił odkładamy równolegle do ich linii działania.
Wektor poprowadzony z początku wektora P
1
do końca wektora P
n
jest
wypadkową rozpatrywanego układu sił zbieżnych.
równowaga płaskiego i przestrzennego
Analityczny warunek równowagi (metoda analityczna) płaskiego układu sił
zbieżnych (czynnych i reakcji więzów) brzmi następująco: aby siły zbieżne
leżące w jednej płaszczyźnie były w równowadze, sumy rzutów tych sił na
osie układu współrzędnych muszą być równe zeru
Geometryczny warunek równowagi (metoda geometryczna) płaskiego
układu sił zbieżnych brzmi: aby układ sił zbieżnych działających w jednej
płaszczyźnie znajdował się w równowadze, wielobok utworzony ze wszystkich
sił tego układu musi być zamknięty.
Wskazówki metodyczne przy wyznaczaniu reakcji więzów ciała sztywnego
poddanego działaniu płaskiego układu sił zbieżnych:
a.
wydzielić ciało sztywne, którego równowagę rozpatrujemy,
b.
narysować siły czynne i reakcje więzów,
c.
sprawdzić, czy układ sił jest statycznie wyznaczalny,
d.
obrać układ współrzędnych Oxy, napisać równania równowagi według
powyższych wzorów i rozwiązać je ze względu na niewiadome (metoda
analityczna),
e.
narysować zamknięty wielobok sił utworzony ze wszystkich sił
rozpatrywanego układu i wyznaczyć poszukiwane niewiadome (metoda
geometryczna).
Analityczny warunek równowagi (metoda analityczna) przestrzennego
układu sił zbieżnych sprowadza się do trzech równań rzutów sił na dowolne
trzy nierównoległe do jednej płaszczyzny osie. Po przyjęciu rzutowania na
osie prostokątnego układu współrzędnych Oxyz otrzymamy następujące
równania równowagi
Geometryczny warunek równowagi (metoda geometryczna)
przestrzennego układu sił zbieżnych jest spełniony, gdy wypadkowa tych sił
będzie równa zeru. Wielobok sił jest wtedy zamknięty i ma zgodny obieg
wektorów sił.
Wskazówki metodyczne przy wyznaczaniu reakcji więzów ciała sztywnego
poddanego działaniu przestrzennego układu sił zbieżnych są podobne jak w
przypadku płaskiego układu sił zbieżnych.
PŁASKI UKŁAD SIŁ
REDUKCJA PŁASKIEGO UKŁADU SIŁ
Dowolny układ sił, działających na ciało sztywne, o liniach działania leżących
w jednej płaszczyźnie możemy zastąpić wektorem głównym R, przyłożonym
do dowolnie wybranego środka redukcji O oraz momentem głównym M
o
względem środka redukcji O. Wektor główny R jest równy sumie
geometrycznej wszystkich sił układu
Wartość wektora głównego oraz kąt
, jaki wektor ten tworzy z osią Ox,
wyznaczamy ze wzorów
Moment główny M
o
względem środka redukcji O jako początku układu
współrzędnych Oxy jest równy sumie momentów danych sił układu względem
punktu O
Wektor momentu głównego M
o
jest wektorem o jednej składowej w
kierunku wersora k, czyli prostopadły do płaszczyzny Oxy i wektora głównego
R.
Wyrażenie
gdzie F jest siłą działającą wzdłuż prostej l, a r jej ramieniem nazywamy
momentem siły względem dowolnego punktu O.
Jest to wektor mający następujące cechy:
wartość liczbową równą iloczynowi (F · r) wartości siły F i jej ramienia r
Kierunek prostopadły do płaszczyzny wyznaczonej przez linię działania
siły oraz biegun
Zwrot momentu przyjmujemy zgodnie z regułą śruby prawoskrętnej
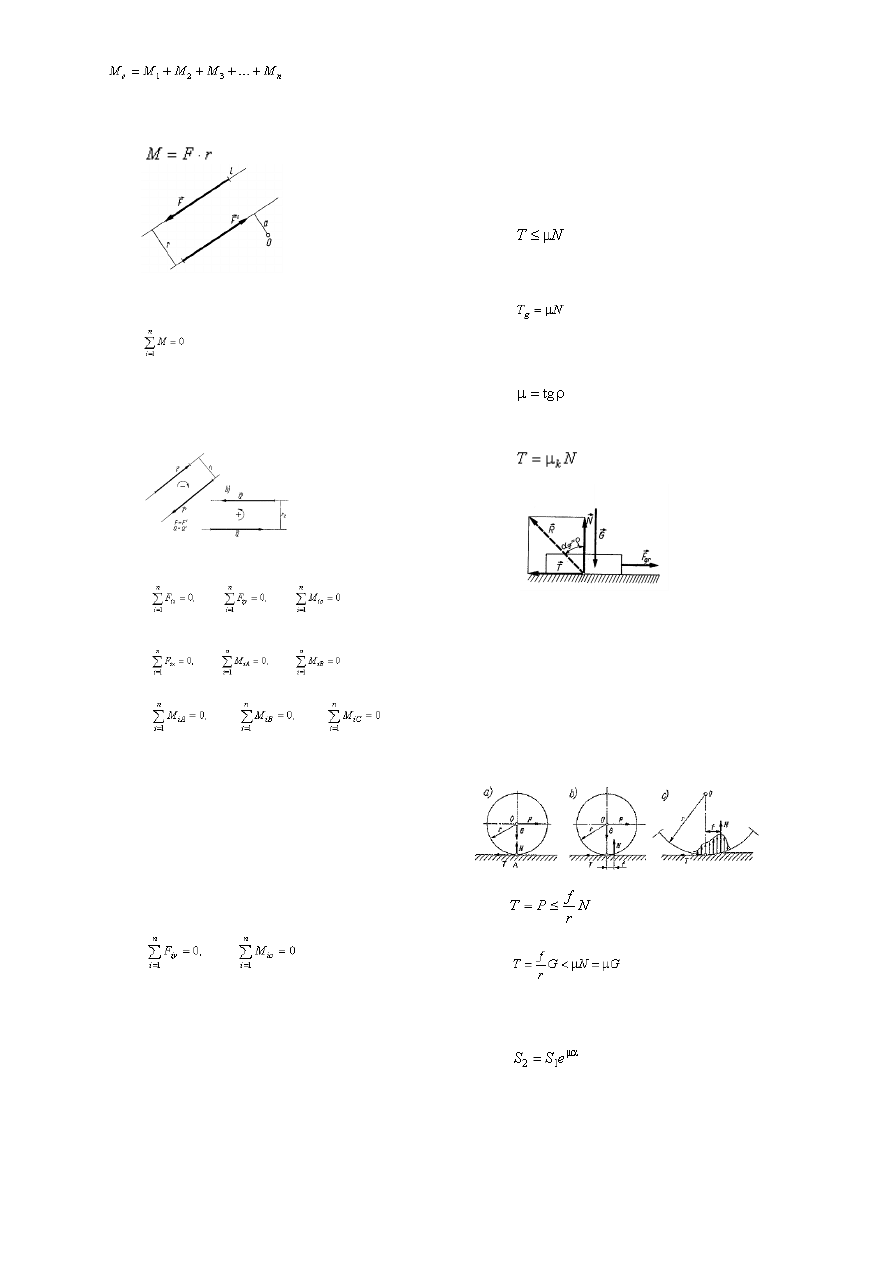
Wzór na moment główny w prostszej postaci przedstawia się następująco:
gdzie M
1
, M
2
,
, M
n
to poszczególne momenty sił.
Parą sił nazywamy układ dwóch sił równej wartości i równoległych (o
jednakowych kierunkach), lecz o przeciwnych zwrotach.
Iloczyn
wartości jednej z sił i ramienia pary nazywamy momentem pary sił.
Warunek równowagi par sił.
Dowolna liczba par sił działających w jednej płaszczyźnie lub w płaszczyznach
równoległych jest w równowadze wtedy, gdy algebraiczna suma ich momentów
jest równa zeru.
Każdą parę sił możemy zastąpić wektorem momentu sił i odwrotnie
każdy
wektor momentu sił możemy zastąpić parą sił, jeśli tylko iloczyn wartości siły i
odległości między siłami wynosi M.
Moment pary sił uważamy za dodatni, jeżeli para dąży do obrócenia swego
ramienia w stronę przeciwną do ruchu wskazówek zegara. Jeżeli para dąży do
obrócenia swego ramienia w stronę zgodną z ruchem wskazówek zegara, to jej
moment uważamy za ujemny.
RÓWNOWAGA DOWOLNEGO PŁASKIEGO UKŁADU SIŁ
Płaski dowolny układ sił znajduje się w równowadze, jeżeli sumy rzutów
wszystkich sił na osie układu są równe zeru i moment wszystkich sił względem
dowolnego punktu O płaszczyzny działania sił jest równy zeru.
Jeżeli moment układu sił względem dwóch punktów A i B jest równy zeru oraz
rzut sił na oś nieprostopadłą do odcinka AB łączącego te punkty jest równy zeru,
to płaski układ sił jest w równowadze
Dla równowagi płaskiego układu sił sumy momentów wszystkich sił względem
trzech punktów nie leżących na jednej prostej muszą być równe zeru
Wskazówki metodyczne przy wyznaczaniu reakcji więzów ciała sztywnego
poddanego działaniu dowolnego płaskiego układu sił:
a.
wydzielić ciało sztywne, którego równowagę rozpatrujemy,
b.
narysować siły czynne i reakcje więzów,
c.
sprawdzić, czy układ sił jest statycznie wyznaczalny,
d.
w metodzie analitycznej napisać równania równowagi i rozwiązać je ze
względu na niewiadome,
e.
w metodzie geometrycznej narysować zamknięty wielobok sił, utworzony ze
wszystkich sił rozpatrywanego układu i wyznaczyć poszukiwane
niewiadome.
Szczególnym przypadkiem dowolnego płaskiego układu sił jest płaski układ sił
równoległych. Zatem płaski równoległy układ sił znajduje się w równowadze, jeżeli
spełnione są dwa równania równowagi
REDUKCJA PŁASKIEGO UKŁADU SIŁ
Zagadnieniami statycznie wyznaczalnymi
nazywamy takie zagadnienia, które
dotyczą równowagi układu sił działających w jednej płaszczyźnie na jedno lub
kilka ciał sztywnych (układ mechaniczny), w których istnieje możliwość
wyznaczenia niewiadomych sił. Niewiadome siły stanowią zwykle reakcje podpór
albo siły wzajemnego oddziaływania wewnątrz rozważanego układu
mechanicznego.
W przypadku układu statycznie wyznaczalnego liczba reakcji zastępujących
działanie więzów jest równa liczbie równań równowagi. Jeżeli więzów jest za
mało, to dany układ mechaniczny jest niesztywny. Równowaga takiego układu
może być zapewniona w przypadku spełnienia dodatkowych warunków, które
zapewniają układowi odpowiednią postać geometryczną.
Gdy więzów jest więcej niż potrzeba do unieruchomienia danego układu
mechanicznego, dany układ jest przesztywniony. Wówczas niewiadomych reakcji
jest więcej niż mamy równań równowagi i dlatego niektórych reakcji nie można
wyznaczyć metodami stosowanymi w statyce. Zagadnienia takie nazywamy
zagadnieniami statycznie niewyznaczalnymi.
TARCIE
Tarciem
nazywa się zjawisko powstawania sił stycznych do powierzchni styku
dwóch ciał.
T
ARCIE ŚLIZGOWE
W przypadku ciała pozostającego w spoczynku na chropowatej powierzchni
zależność między siłą tarcia T a naciskiem normalnym N wyraża się następująco
gdzie
współczynnik tarcia ślizgowego (statycznego).
Jeżeli siła tarcia osiąga swą graniczną wartość, co oznacza, że tarcie jest
całkowicie rozwinięte, to siła tarcia przedstawia się następująco
Kierunek siły tarcia T, działającej na ciało znajdujące się w spoczynku, jest
przeciwny do kierunku ruchu, który zaistniałby, gdyby tarcia nie było.
Kąt tarcia jest to maksymalny kąt
, o jaki może się odchylić linia działania
całkowitej reakcji R od kierunku normalnej do powierzchni styku i zachodzi
następująca zależność
W przypadku ciała ślizgającego się po chropowatej powierzchni siła tarcia jest
skierowana przeciwnie do kierunku ruchu, a jej wartość jest określona
zależnością
gdzie
k
współczynnik tarcia ślizgowego (kinetycznego).
Wskazówki metodyczne przy wyznaczaniu reakcji więzów ciał sztywnych
poddanych działaniu płaskich układów sił z tarciem
a.
wydzielić ciało sztywne, bądź ciała sztywne, których równowagę
rozpatrujemy,
b.
narysować siły czynne, reakcje więzów obciążających te ciała i siły tarcia,
c.
sprawdzić, czy układ sił jest statycznie wyznaczalny i obrać układ
współrzędnych Oxy,
d.
napisać równania równowagi,
e.
napisać równania tarcia,
f.
rozwiązać układ równań zestawionych w dwóch ostatnich punktach oraz
wyznaczyć wielkości niewiadome.
Tarcie toczenia
powstaje przy usiłowaniu przetoczenia walca o ciężarze G po
poziomej płaszczyźnie.
Siła tarcia tocznego musi spełniać warunki (przy równowadze walca)
W przypadku toczenia walca wartość siły tarcia tocznego T musi być mniejsza
od wartości siły tarcia ślizgowego
N
rozwiniętego, co wyraża się nierównością
gdzie f
współczynnik tarcia tocznego, r
promień walca.
Tarciem c
ięgna o krążek nazywamy siły tarcia występujące między
powierzchniami cylindrycznymi i cięgnami na nie nawiniętymi. Związek miedzy
napięciami S
1
i S
2
w cięgnie opasującym krążek wyraża się wzorem
gdzie
współczynnik tarcia ślizgowego (statycznego) między cięgnem a
powierzchnią krążka,
kąt opasania, na którym cięgno przylega do krążka.
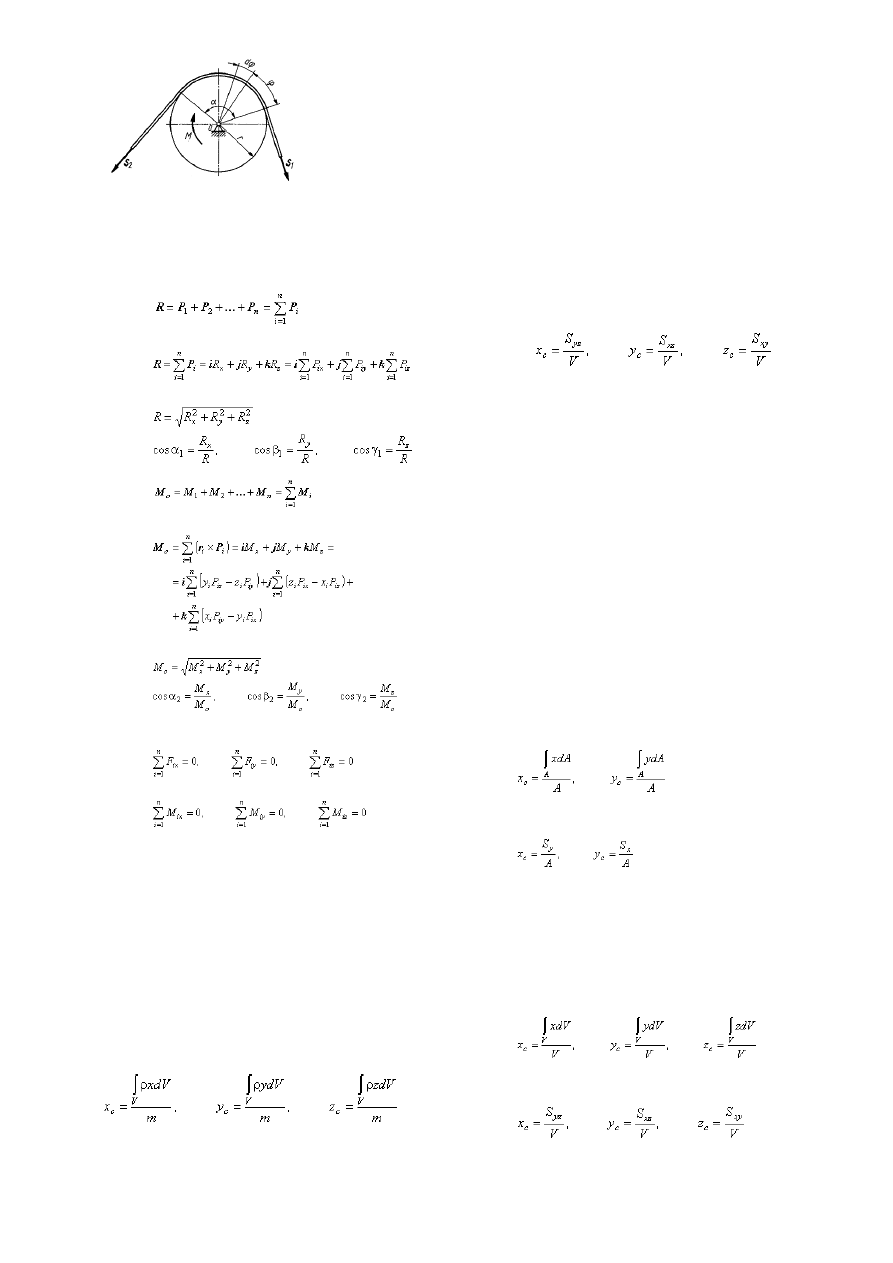
Przestrzenny układ sił
Redukcja przestrzennego układu sił
Dowolny przestrzenny układ sił działających na ciało sztywne możemy zastąpić
wektorem
głównym R, przyłożonym do dowolnie wybranego środka redukcji O,
równym sumie geometrycznej wszystkich sił układu oraz momentem głównym
M
o
, równym sumie geometrycznej momentów tych sił względem środka redukcji.
Wektor główny obliczamy ze wzoru
lub jeżeli znane są składowe sił w prostokątnym układzie współrzędnych, wektor
główny obliczamy ze wzoru
Wartość wektora głównego oraz jego cosinusy kierunkowe wyznaczamy ze
wzorów
Moment główny obliczamy ze wzoru
lub po obraniu początku układu współrzędnych jako środka redukcji, moment
główny obliczamy ze wzoru
Wartość i cosinusy kierunkowe wektora momentu głównego obliczamy ze
wzorów
Przestrzenny
układ sił jest w równowadze, jeżeli sumy rzutów wszystkich sił na
trzy osie układu równe są zeru i sumy momentów wszystkich sił względem trzech
osi układu są równe zeru.
Wskazówki metodyczne przy wyznaczaniu reakcji więzów ciała sztywnego
poddanego działaniu dowolnego przestrzennego układu sił:
a.
wydzielić ciało sztywne bądź ciała sztywne, których równowagę
rozpatrujemy,
b.
narysować siły czynne i reakcje więzów, obciążające te ciała,
c.
sprawdzić czy układ sił jest statycznie wyznaczalny i obrać układ
współrzędnych Oxyz,
d.
napisać równania równowagi,
e.
rozwiązać układ równań zestawiony w poprzednim punkcie i wyznaczyć
wielkości niewiadome.
Srodek Ciężkości
Ś jest to punkt, w którym jest zaczepiona siła
przedstawiająca ciężar danego ciała, i pokrywa się on ze środkiem sił
równoległych, które reprezentują elementarne siły ciężkości, tj. siły przyciągania
cząstek ciała materialnego przez kulę ziemską, skierowane pionowo do środka
ziemi.
Współrzędne x
c
, y
c
i z
c
środka ciężkości C dowolnego ciała jednorodnego
wyznaczamy ze wzorów
gdzie
gęstość ciała, m
masa danego ciała jednorodnego.
Z wzorów tych wynika, że współrzędne środka ciężkości C zależą od kształtu ciała
oraz rozkładu masy.
Wyrażenia w licznikach tych wzorów noszą nazwę momentów statycznych ciała
materialnego względem odpowiednich płaszczyzn układu współrzędnych Oxyz.
Twierdzenia przydatne do wyznaczania środków ciężkości ciał materialnych
jednorodnych
Jeżeli bryła ma płaszczyznę symetrii, to środek ciężkości leży w tej
płaszczyźnie.
Gdy bryła ma dwie płaszczyzny symetrii, środek ciężkości leży na linii ich
przecięcia.
Gdy bryła ma trzy płaszczyzny symetrii, środek ciężkości leży w punkcie
przecięcia się tych płaszczyzn.
Moment statyczny dowolnej figury wzgl
ędem płaszczyzny przechodzącej
przez środek ciężkości tej figury jest równy zeru.
Metody stosowane do wyznaczenia położenia środka ciał jednorodnych
analityczna
polegająca na zastosowaniu odpowiednich wzorów,
momentów statycznych, w której korzysta się z twierdzenia, że moment
statyczny ciała względem płaszczyzny przechodzącej przez środek
ciężkości tego ciała jest równy zeru. Wzory do obliczenia współrzędnych
środka ciężkości danego ciała
gdzie S
yz
, S
xz
i S
xy
to momenty statyczne z odpowiednim indeksem,
określającym płaszczyznę, względem której oblicza się te momenty.
dzielenia
, która sprowadza się do następujących etapów:
o
podziału bryły na proste elementy bryłowe, których położenia
środków ciężkości są znane,
o
obliczenia momentów statycznych bryły względem płaszczyzn
przyjętego układu współrzędnych (sumując iloczyny objętości
brył prostych i współrzędnych środków ciężkości)
o
obliczenia z wcześniejszych wzorów współrzędnych środka
ciężkości bryły (dzieląc momenty statyczne bryły przez
całkowitą objętość bryły).
metoda ta stosowana jest również do obliczania współrzędnych środków
ciężkości figur płaskich, powierzchni i linii.
-
uzupełniania (ujemnych mas), która polega na tym, że bryłę (figurę płaską,
powierzchnię, linię) uzupełnia się inną bryłą tak dobraną, aby uzyskać bryłę
(figurę płaską, powierzchnię, linię) o możliwie prostej postaci. Wyznaczenie
środka ciężkości sprowadza się wówczas do metody momentów statycznych,
odejmując od momentu statycznego otrzymanej bryły (figury płaskiej,
powierzchni, linii) moment statyczny bryły (figury płaskiej, powierzchni, linii)
uzupełniającej.
środki ciężkości figur płaskich
Przyjmuje się, że grubość figury
płaskiej jest stała i znikomo mała w porównaniu z pozostałymi wymiarami oraz
ciężar na jednostkę pola powierzchni figury płaskiej jest stały. Położenie środka
ciężkości figury płaskiej zależy zatem tylko od kształtu geometrycznego tej figury.
Obliczanie współrzędnych środka ciężkości traktuje się jako zagadnienie
dwuwymiarowe, gdyż współrzędna z
c
= 0.
Współrzędne środka ciężkości figury płaskiej wyznaczamy ze wzorów
gdzie A -
pole powierzchni figury płaskiej w m
2
.
Przy wykorzystaniu definicji momentów statycznych figur płaskich współrzędne
środka ciężkości figury płaskiej obliczymy ze wzorów
gdzie S
y
-
moment statyczny względem osi y, S
x
-
moment statyczny względem
osi x
. Przydatne twierdzenia do obliczania współrzędnych środka ciężkości figury
płaskiej
-
gdy figura płaska ma oś symetrii, to środek ciężkości
leży na tej osi,
-
jeżeli figura płaska ma dwie osie symetrii, to środek
ciężkości leży w punkcie przecięcia tych osi.
ŚRODKI CIĘŻKOŚCI
BRYŁ
Położenie środka ciężkości bryły zależy tylko od kształtu geometrycznego tej
bryły.
Obliczanie współrzędnych środka ciężkości traktuje się jako zagadnienie
trójwymiarowe.
Współrzędne środka ciężkości bryły wyznaczamy ze wzorów
gdzie V
całkowita objętość danej bryły w m
3
.
P
rzy wykorzystaniu definicji momentów statycznych brył współrzędne środka
ciężkości bryły obliczymy ze wzorów
gdzie S
yz
, S
xz
i S
xy
to momenty statyczne z odpowiednim indeksem, określającym
płaszczyznę, względem której oblicza się te momenty
Wyszukiwarka
Podobne podstrony:
9048000196926-mechanika techniczna opracowane pytania maruszewski-ulepszone, 1
Mechanika Techniczna I Skrypt 5 06
Mechanika Techniczna Opracowanie
9496136526577-mechanika techniczna opracowane pytania maruszewski POPRAWIONE, Politechnika Poznanska
mechanika techniczna opracowane Nieznany
Mechanika Techniczna - Opracowania - Do Prof. Maruszewskiego, Politechnika Poznańska (PP), Mechanika
mechanika techniczna opracowane pytania maruszewski (1), Polibuda (MiBM), Semestr III, III semestr,
Mechanika Techniczna I Opracowanie 05
9048000196926 mechanika techniczna opracowane pytania maruszewski ulepszone
Mechanika Techniczna Opracowania Do Prof Maruszewskiego 1 semestr
opracowanie 4 mechana, Studia - Mechatronika, III semestr, Mechanika Techniczna
ZAKRES NA EGZAMIN Z MECHANIKI TECHNICZNEJ II DLA SEMESTRU III opracowanie
opracowanie 4 mt, Studia - Mechatronika, III semestr, Mechanika Techniczna
Wydymala opracowanie pytan, sem III, +Mechanika Techniczna II - Wykład.Ćwiczenia.Laboratorium, mecha
więcej podobnych podstron