Automatyka i sterowanie
Krzysztof Marzjan
Układy z czasem dyskretnym, jedno wejście – jedno wyjście (discrete-time single
input- single output –SISO)
Liniowe równania różnicowe
Różnica progresywna:
)
(
)
1
(
:
)
(
k
x
k
x
k
x
−
+
=
∆
[
]
)
(
)
1
(
2
)
2
(
)
(
)
1
(
)
1
(
)
2
(
)
(
)
1
(
:
)
(
2
k
x
k
x
k
x
k
x
k
x
k
x
k
x
k
x
k
x
k
x
+
+
−
+
=
=
−
+
−
+
−
+
=
∆
−
+
∆
=
∆
)
(
)
1
(
:
)
(
1
1
k
x
k
x
k
x
m
m
m
−
−
∆
−
+
∆
=
∆
2
Automatyka i sterowanie – układy dyskretne
)
(
!
)!
(
!
)
1
(
)
(
0
i
k
m
x
i
i
m
m
k
x
m
i
i
m
−
+
−
−
=
∆
∑
=
{
} {
} {
}
)
0
(
)
(
)
1
(
)
(
)
0
(
)
(
)
(
)
1
(
)
(
zx
z
X
z
z
X
zx
z
zX
k
x
Z
k
x
Z
k
x
Z
−
−
=
−
−
=
−
+
=
∆
{
}
{
}
{
} {
}
(
)
(
)
[
]
(
)
)
0
(
)
0
(
)
1
(
)
(
1
)
0
(
)
1
(
)
0
(
)
1
(
)
(
1
)
1
(
)
0
(
)
2
(
)
(
1
)
(
)
0
(
2
)
(
2
)
1
(
)
0
(
)
(
)
(
)
1
(
2
)
2
(
)
(
2
2
2
2
2
2
x
z
x
z
z
z
X
z
x
x
z
x
z
z
z
X
z
zx
x
z
z
z
X
z
z
X
zx
z
zX
zx
x
z
z
X
z
k
x
Z
k
x
Z
k
x
Z
k
x
Z
∆
−
−
−
−
=
=
−
−
−
−
−
=
−
−
−
−
=
=
+
+
−
−
−
=
=
+
+
−
+
=
∆
{
}
∑
−
=
−
−
∆
−
−
−
=
∆
1
0
1
)
0
(
)
1
(
)
(
)
1
(
)
(
m
i
i
i
m
m
m
x
z
z
z
X
z
k
x
Z
{
}
∑ ∑
=
−
−
=
−
−
−
−
−
−
=
∆
m
i
i
m
k
k
i
m
i
m
m
k
x
z
i
i
m
m
z
z
X
z
k
x
Z
0
1
0
)
(
!
)!
(
!
)
1
(
)
(
)
1
(
)
(
3
Automatyka i sterowanie – układy dyskretne
Liniowe równania różnicowe:
)
(
)
(
~
)
(
~
)
(
~
)
(
~
0
1
1
1
kT
f
kT
y
a
kT
y
a
kT
y
a
kT
y
a
n
n
n
n
=
+
∆
+
+
∆
+
∆
−
−
L
)
(
~
)
(
~
)
(
~
)
(
~
)
(
0
1
1
1
kT
u
b
kT
u
b
kT
u
b
kT
u
b
kT
f
n
n
n
n
+
∆
+
+
∆
+
∆
=
−
−
L
warunki początkowe:
)
0
(
),
0
(
,
),
0
(
1
y
y
y
n
∆
∆
−
L
)
(
!
)!
(
!
)
1
(
)
(
0
i
k
m
x
i
i
m
m
k
x
m
i
i
m
−
+
−
−
=
∆
∑
=
(
)
(
)
(
)
)
(
)
(
)
1
(
)
1
(
)
(
0
1
1
kT
f
kT
y
a
T
k
y
a
T
k
n
y
a
T
n
k
y
a
n
n
=
+
+
+
+
−
+
+
+
−
L
(
)
(
)
(
)
)
(
)
1
(
)
1
(
)
(
)
(
0
1
1
kT
u
b
T
k
u
b
T
k
n
u
b
T
n
k
u
b
kT
f
n
n
+
+
+
+
−
+
+
+
=
−
L
warunki początkowe:
)
0
(
),
1
(
,
),
1
(
x
y
n
y
L
−
{
}
∑
∑
−
=
−
−
=
−
−
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
=
+
1
0
1
0
)
(
)
(
)
(
)
(
)
(
m
i
i
m
m
m
i
i
m
z
i
x
z
X
z
z
i
x
z
X
z
m
k
x
Z
4
Automatyka i sterowanie – układy dyskretne
)
(
)
0
(
)
(
)
(
)
(
)
(
)
(
)
(
1
2
0
1
1
0
0
1
1
1
z
F
zy
a
z
i
y
a
z
i
y
a
z
Y
a
z
zY
a
z
Y
z
a
z
Y
z
a
n
i
i
n
n
n
i
i
n
n
n
n
n
n
+
+
+
+
=
=
+
+
+
+
∑
∑
−
=
−
−
−
=
−
−
−
K
K
)
0
(
)
(
)
(
)
(
1
2
0
1
1
0
1
0
zy
a
z
i
y
a
z
i
y
a
z
A
z
L
n
i
i
n
n
n
i
i
n
n
n
i
i
i
+
+
+
=
=
∑
∑
∑
−
=
−
−
−
=
−
=
K
)
1
(
)
1
(
)
0
(
2
1
1
−
+
+
+
=
n
y
a
y
a
y
a
A
n
L
)
2
(
)
1
(
)
0
(
3
2
2
−
+
+
+
=
n
y
a
y
a
y
a
A
n
L
....................................
)
0
(
y
a
A
n
n
=
znika dla zerowych warunków początkowych
0
1
1
1
)
(
a
z
a
z
a
z
a
z
M
n
n
n
n
+
+
+
+
=
−
−
K
5
Automatyka i sterowanie – układy dyskretne
wielomian charakterystyczny
)
(
)
(
)
(
)
(
0
z
F
z
L
z
Y
z
M
+
=
)
(
)
(
)
(
)
(
)
(
0
z
M
z
F
z
M
z
L
z
Y
+
=
⎭
⎬
⎫
⎩
⎨
⎧
+
⎭
⎬
⎫
⎩
⎨
⎧
=
−
−
)
(
)
(
)
(
)
(
)
(
1
0
1
z
M
z
F
Z
z
M
z
L
Z
kT
y
zerowe sterowanie:
)
(
)
(
)
(
0
z
M
z
L
z
Y
=
,
⎭
⎬
⎫
⎩
⎨
⎧
=
−
)
(
)
(
)
(
0
1
z
M
z
L
Z
kT
y
zerowe warunki początkowe
)
(
)
(
)
(
z
M
z
F
z
Y
=
,
⎭
⎬
⎫
⎩
⎨
⎧
=
−
)
(
)
(
)
(
1
z
M
z
F
Z
kT
y
6
Automatyka i sterowanie – układy dyskretne
(
)
)
(
)
(
)
(
)
(
0
1
1
1
z
U
z
L
z
U
b
z
b
z
b
z
b
z
F
n
n
n
n
=
+
+
+
+
=
−
−
L
Transmitancja dyskretna:
7
Automatyka i sterowanie – układy dyskretne
)
(
)
(
)
(
),
(
)
(
)
(
)
(
)
(
)
(
z
M
z
L
z
G
z
U
z
G
z
U
z
M
z
L
z
Y
=
=
=
8
Automatyka i sterowanie – układy dyskretne
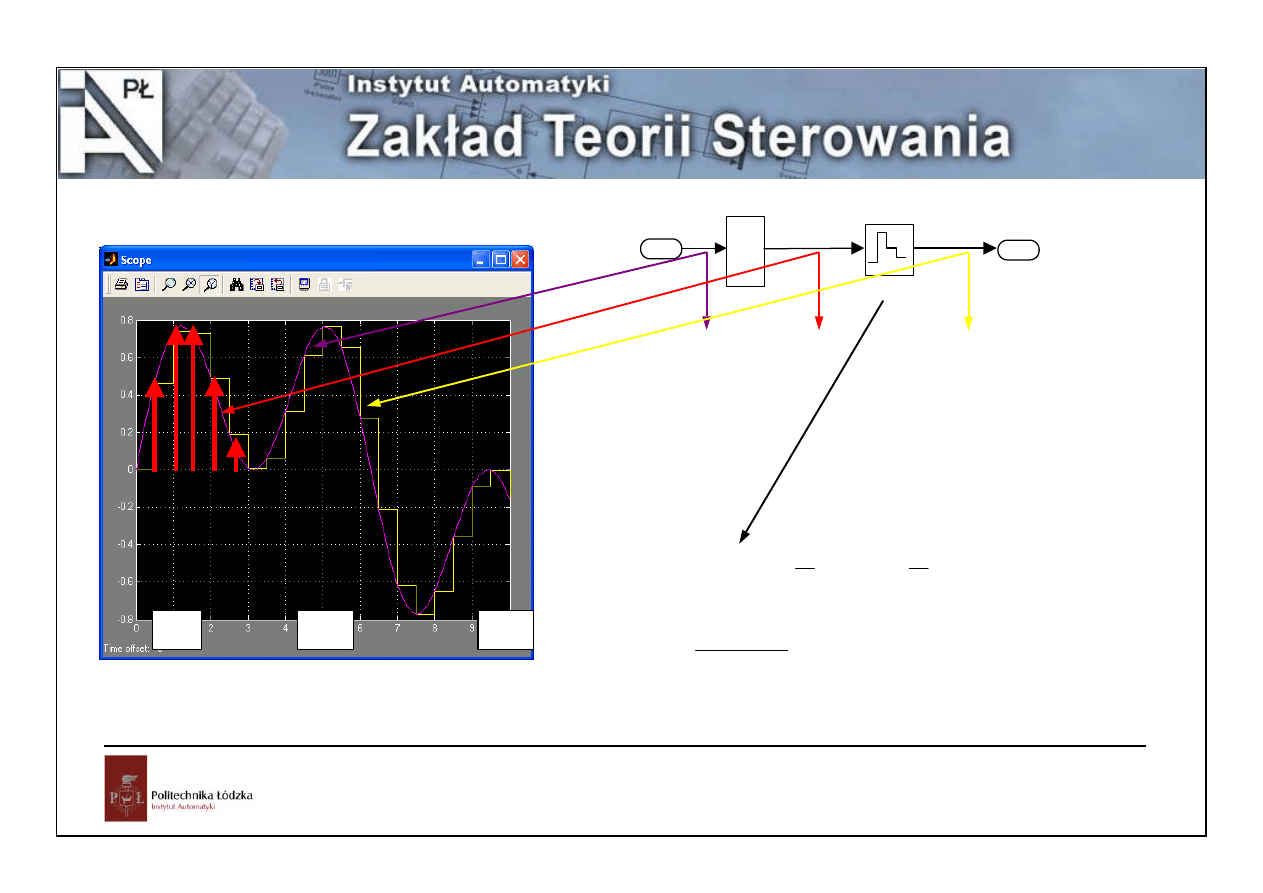
Impulsowanie i ekstrapolacja
out
x(t)
f(u)
IMPULSATOR
T
Ekstrapolator
in
f(t)
5
,
0
)
(
)
(
)
(
*
=
T
t
x
t
f
t
f
[
]
)
(
)
(
)
(
1
1
1
)
(
)
(
)
(
1
)
(
1
)
(
)
(
)
(
)
(
*
0
)
1
(
0
0
s
f
s
E
e
kT
f
s
e
e
s
e
s
kT
f
s
x
T
kT
t
kT
t
kT
f
t
x
T
kT
t
kT
kT
f
t
x
kTs
k
Ts
Ts
k
kTs
k
k
=
−
=
=
⎥⎦
⎤
⎢⎣
⎡
−
=
−
−
−
−
=
+
<
≤
=
−
∞
=
−
+
−
−
∞
=
∞
=
∑
∑
∑
2T
10T
20T
)
(
)
(
)
(
)
(
)
(
0
*
kT
t
t
f
kT
t
kT
f
t
f
k
k
−
=
−
=
∑
∑
∞
−∞
=
∞
=
δ
δ
[ ]
{
}
Ts
e
z
k
Ts
k
kTs
k
kT
f
Z
e
kT
f
e
kT
f
s
f
=
−
−
∞
=
−
∞
=
=
=
=
∑
∑
)
(
)
(
)
(
)
(
0
0
*
Jak obliczyć transmitancję dyskretną:
Jeżeli układ o wejściu u i wyjściu y składa się z impulsatora i części ciągłej o transmitancji G(s), to na wejście G(s)
do chwili t trafia ciąg impulsów Diraca
)
(
)
(
iT
t
iT
u
−
δ
. Żeby obliczyć y(t) trzeba zsumować odpowiedzi impulsowe
G(s) na wszystkie impulsy do chwili t. Tak więc:
{
}
)
(
)
(
1
s
G
L
t
g
−
=
[
]
∑
=
−
=
k
i
iT
u
T
i
k
g
kT
y
0
)
(
)
(
)
(
jest splotem ciągów u(kT) i g(kT), transformata Z będzie więc iloczynem transformat
{
}
)
(
)
(
)
(
z
U
kT
g
Z
z
Y
=
czyli
9
Automatyka i sterowanie – układy dyskretne
{
}
)
(
)
(
kT
g
Z
z
G
=
Odpowiedź impulsowa
{
}
kT
t
s
G
L
kT
g
=
−
=
)
(
)
(
1
(zerowe war. pocz.)
{
}
{
}
{
}
)
(
)
(
)
(
1
z
G
s
G
L
Z
kT
g
Z
kT
t
=
=
=
−
odpowiedź na dowolne wymuszenie przy zerowych warunkach początkowych jest splotem odpowiedzi impulsowej i
tego wymuszenia
Odpowiedź skokowa
10
Automatyka i sterowanie – układy dyskretne
⎭
⎬
⎫
⎩
⎨
⎧
−
=
−
1
)
(
)
(
1
z
z
z
G
Z
kT
h
(zerowe war. pocz.)
Wpływ położenia biegunów transmitancji na odpowiedź układu
∑
∑
=
=
−
=
−
=
=
m
i
m
i
i
i
i
i
i
z
z
z
B
z
A
z
z
C
z
B
z
A
z
F
1
1
1
)
(
'
)
(
)
(
)
(
)
(
)
1
(
1
)
(
'
)
(
)
(
1
1
−
=
∑
=
−
k
z
z
B
z
A
k
f
m
i
k
i
i
i
Odpowiedź jednostkowa układu o transmitancji
)
(
)
)(
(
)
(
,
)
(
)
(
)
(
2
1
n
z
z
z
z
z
z
z
M
z
M
z
L
z
G
−
−
−
=
=
L
⎭
⎬
⎫
⎩
⎨
⎧
−
=
−
1
)
(
)
(
1
z
z
z
G
Z
kT
h
(zerowe war. pocz.)
)
(
1
)
(
)
1
(
)
(
)
1
(
)
1
(
)
(
)
1
(
)
(
)
(
1
1
kT
z
z
M
z
z
L
M
L
z
M
z
z
zL
Z
kT
h
k
i
n
i
i
i
i
∑
=
−
′
−
+
=
⎭
⎬
⎫
⎩
⎨
⎧
−
=
składowa przejściowa
składowa ustalona
11
Automatyka i sterowanie – układy dyskretne
12
Automatyka i sterowanie – układy dyskretne
( )
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
−
+
−
+
+
−
+
=
∑
∑
∈
∈
)
(
'
)
1
(
)
(
arg
)
arg(
cos
)
(
'
)
1
(
)
(
2
)
(
1
)
(
'
)
1
(
)
(
)
1
(
)
1
(
)
(
,
i
i
i
i
C
z
z
k
i
i
i
i
R
z
k
i
i
i
i
z
M
z
z
L
z
k
z
z
M
z
z
L
kT
z
z
M
z
z
L
M
L
kT
h
i
i
i
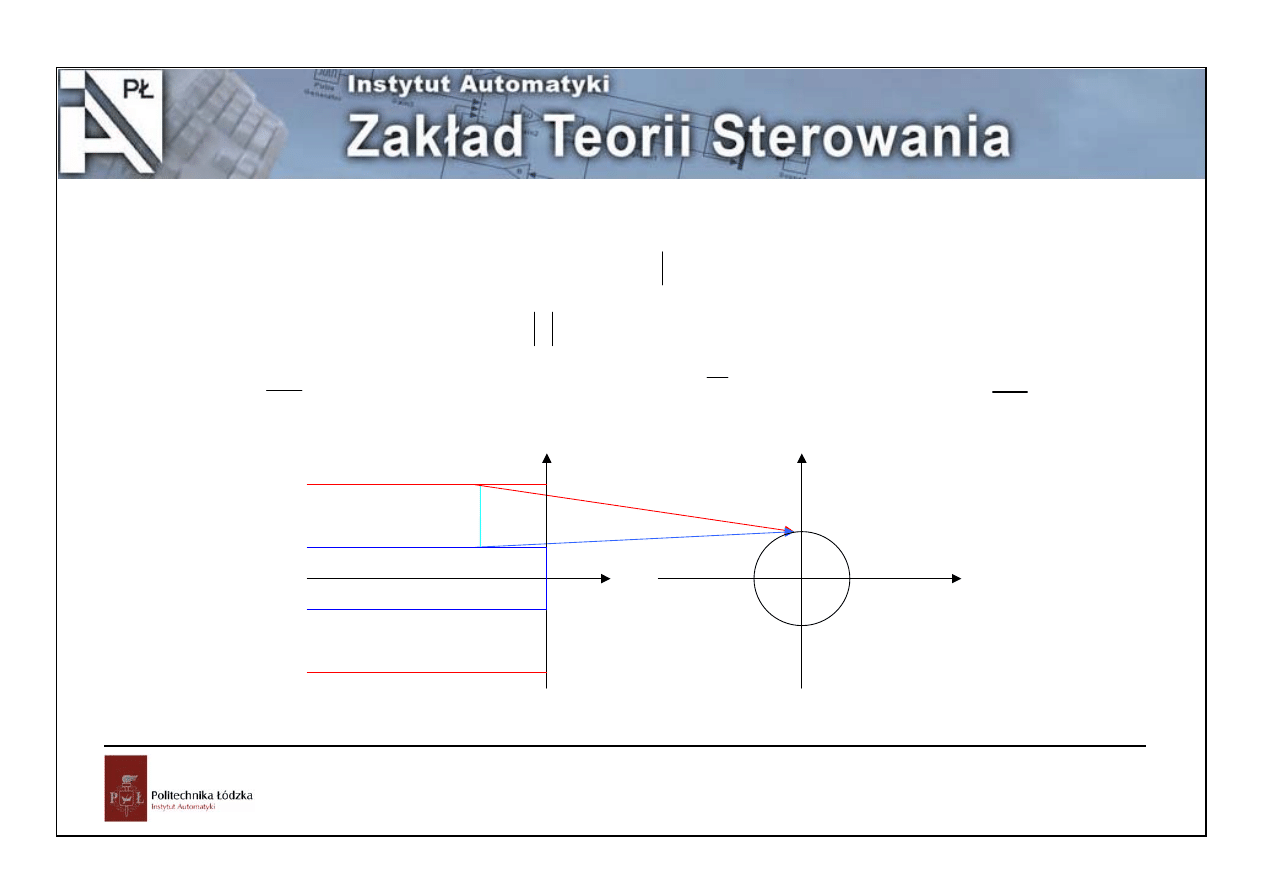
Ekwiwalentne obszary płaszczyzn s i z
[ ]
{
}
Ts
e
z
k
k
Ts
k
kTs
kT
f
Z
e
kT
f
e
kT
f
s
f
=
∞
=
−
∞
=
−
=
=
=
∑
∑
)
(
)
(
)
(
)
(
0
0
*
ω
σ
j
s
+
=
T
j
T
e
e
z
ω
σ
=
T
z
e
z
T
ω
σ
=
=
)
arg(
,
⎟
⎠
⎞
⎜
⎝
⎛ +
+
=
c
T
j
s
π
ω
σ
2
(
)
T
j
T
c
T
jT
T
c
T
j
T
e
e
e
e
e
e
z
ω
σ
π
ω
σ
π
ω
σ
=
=
=
⎟
⎠
⎞
⎜
⎝
⎛ +
+
2
2
T
i
π
ω
2
=
13
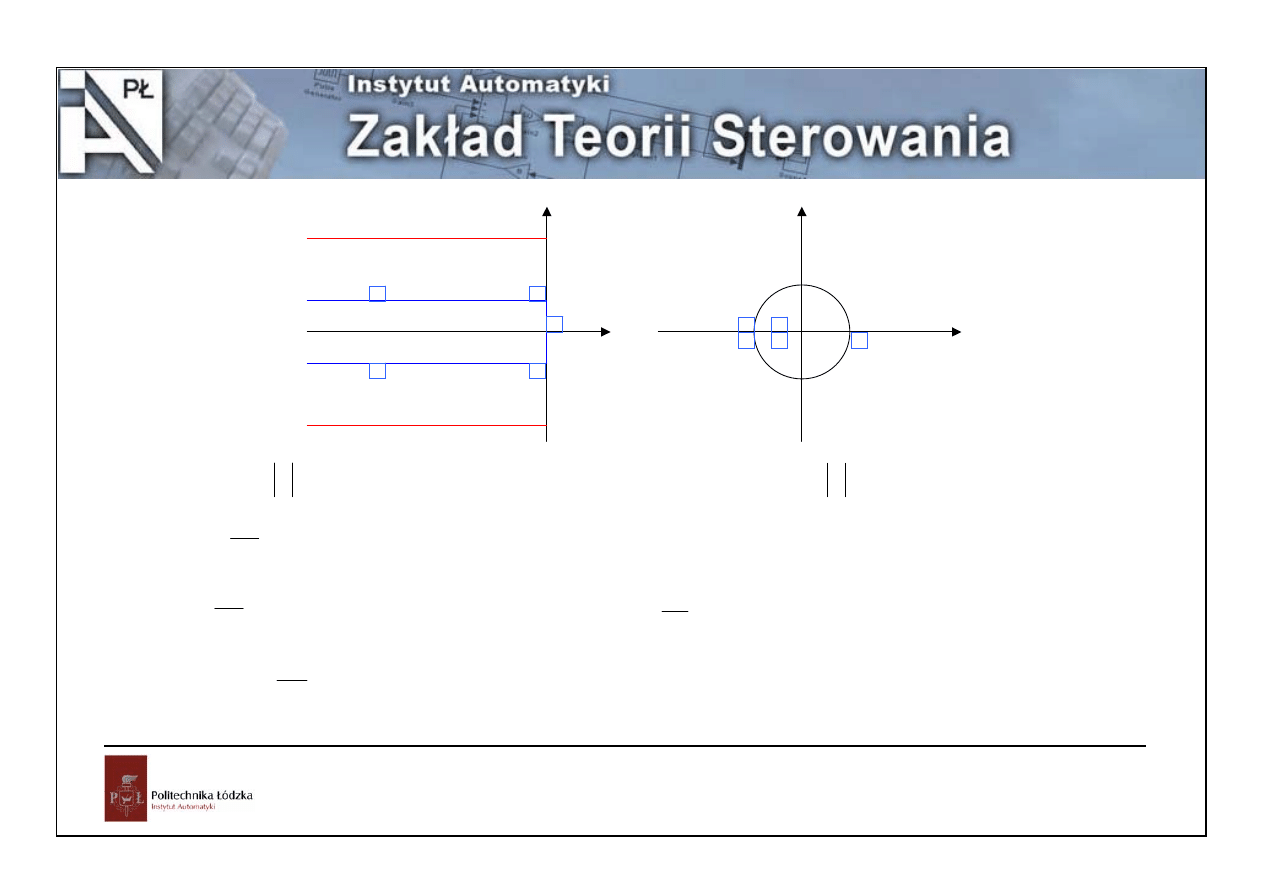
Automatyka i sterowanie – układy dyskretne
Płaszczyzna z
Płaszczyzna s
-jω
i
/2
-3jω
i
/2
jω
i
/2
3jω
i
/2
ω
i
Płaszczyzna z
Płaszczyzna s
-jω
i
/2
-3jω
i
/2
jω
i
/2
3jω
i
/2
a
b
c
d
a
b
c
d
e
e
1)
1
0
<
⇒
<
z
σ
2)
,
T
j
e
z
ω
σ
=
⇒
= 0
1
=
z
3) a)
π
ω
j
i
e
z
j
s
−
=
⇒
−
=
2
,
b)
1
0
=
⇒
=
z
s
,
c)
π
ω
j
i
e
z
j
s
=
⇒
=
2
,
d)
π
σ
ω
σ
j
T
i
e
e
z
j
s
−
=
⇒
+
−
=
2
,
14
Automatyka i sterowanie – układy dyskretne
e)
π
σ
ω
σ
j
T
i
e
e
z
j
s
−
−
=
⇒
−
−
=
2
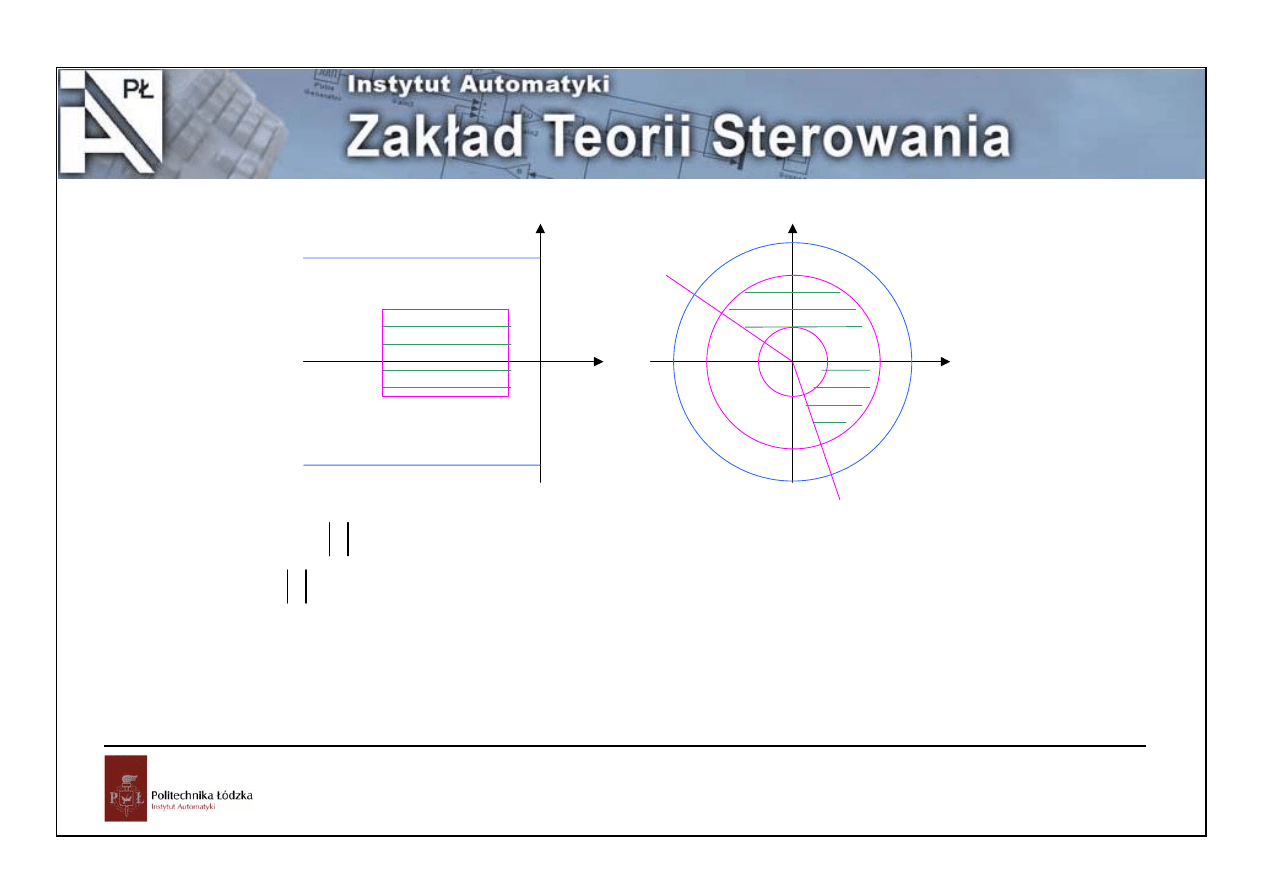
Płaszczyzna z
Płaszczyzna s
-jω
2
-jω
i
/2
jω
1
jω
i
/2
-σ
1
-σ
2
e
-σ
1
T
e
-σ
2
T
z=e
T(σ-jω
2
)
z=e
T(σ+jω
1
)
4)
const
z
const
=
⇒
=
σ
5)
T
e
z
1
1
σ
σ
σ
<
⇒
<
15
Automatyka i sterowanie – układy dyskretne
6)
const
T
z
const
=
=
⇒
=
ω
ω
)
arg(
Transmitancja widmowa
)
sin(
)
(
t
U
t
u
ω
=
T
Ue
Ue
kT
U
i
jk
kT
j
i
ω
ω
ω
ω
=
=
=
)
(
~
i
j
e
z
z
U
z
G
z
U
z
G
z
Y
ω
−
=
=
)
(
)
(
~
)
(
)
(
~
ustalona część odpowiedzi:
i
i
i
i
j
jk
j
k
j
e
z
ust
Ue
e
G
z
e
z
z
U
z
G
Res
kT
y
ω
ω
ω
ω
)
(
)
(
)
(
~
1
=
⎭
⎬
⎫
⎩
⎨
⎧
−
=
−
=
)
(
)
(
i
i
j
j
e
z
e
G
z
G
ω
ω
=
=
- transmitancja widmowa
)
(
i
j
G
ω
)
(
)
(
)
(
i
i
i
jQ
P
j
G
ω
ω
ω
+
=
)
(
)
(
i
i
P
P
ω
ω
=
−
)
(
)
(
i
i
Q
Q
ω
ω
−
=
−
charakterystyki częstotliwościowe:
16
Automatyka i sterowanie – układy dyskretne
amplitudowo-fazowa, amplitudowa, fazowa, logarytmiczne
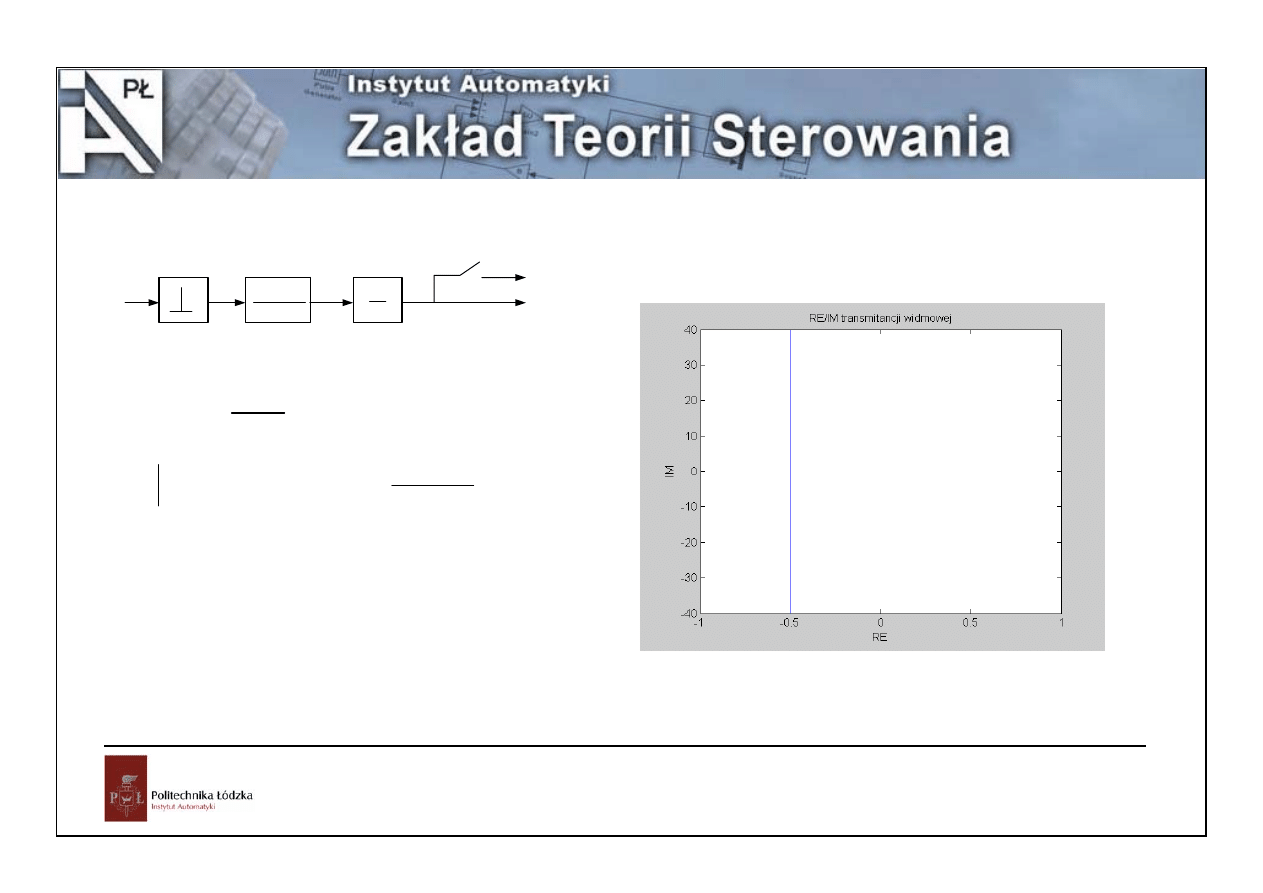
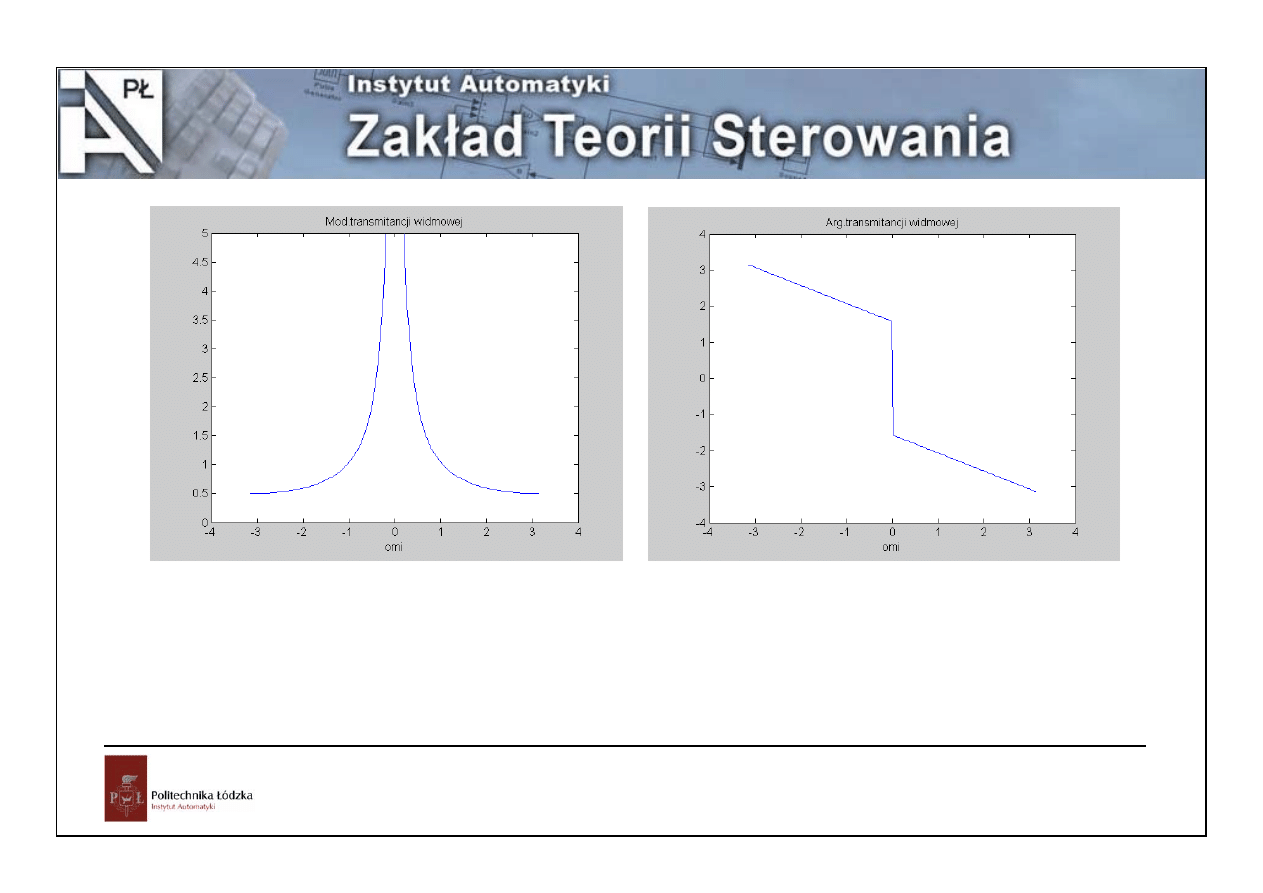
Wyznacz transmitancje i odpowiedzi układu:
s
K
s
e
sT
−
−
1
T
y(kT)
y(t)
1
1
)
(
−
=
z
KT
z
G
1
1
)
(
)
(
−
=
=
=
i
i
i
j
j
j
e
z
e
KT
e
G
z
G
ω
ω
ω
dla KT=1,
π
ω
π
<
<
−
i
:
17
Automatyka i sterowanie – układy dyskretne
18
Automatyka i sterowanie – układy dyskretne
Jeśli układ ma wiele wejść i wyjść, to można opisać go macierzą transmitancji dyskretnych:
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
)
(
)
(
)
(
)
(
)
(
1
1
11
z
G
z
G
z
G
z
G
z
G
mr
m
r
L
M
O
M
L
)
(
)
(
)
(
z
U
z
Y
z
G
j
i
ij
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
=
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
1
1
1
11
1
z
U
z
U
z
G
z
G
z
G
z
G
z
Y
z
Y
r
mr
m
r
m
M
L
M
O
M
L
M
19
Automatyka i sterowanie – układy dyskretne
)
(
)
(
)
(
z
U
z
G
z
Y
=
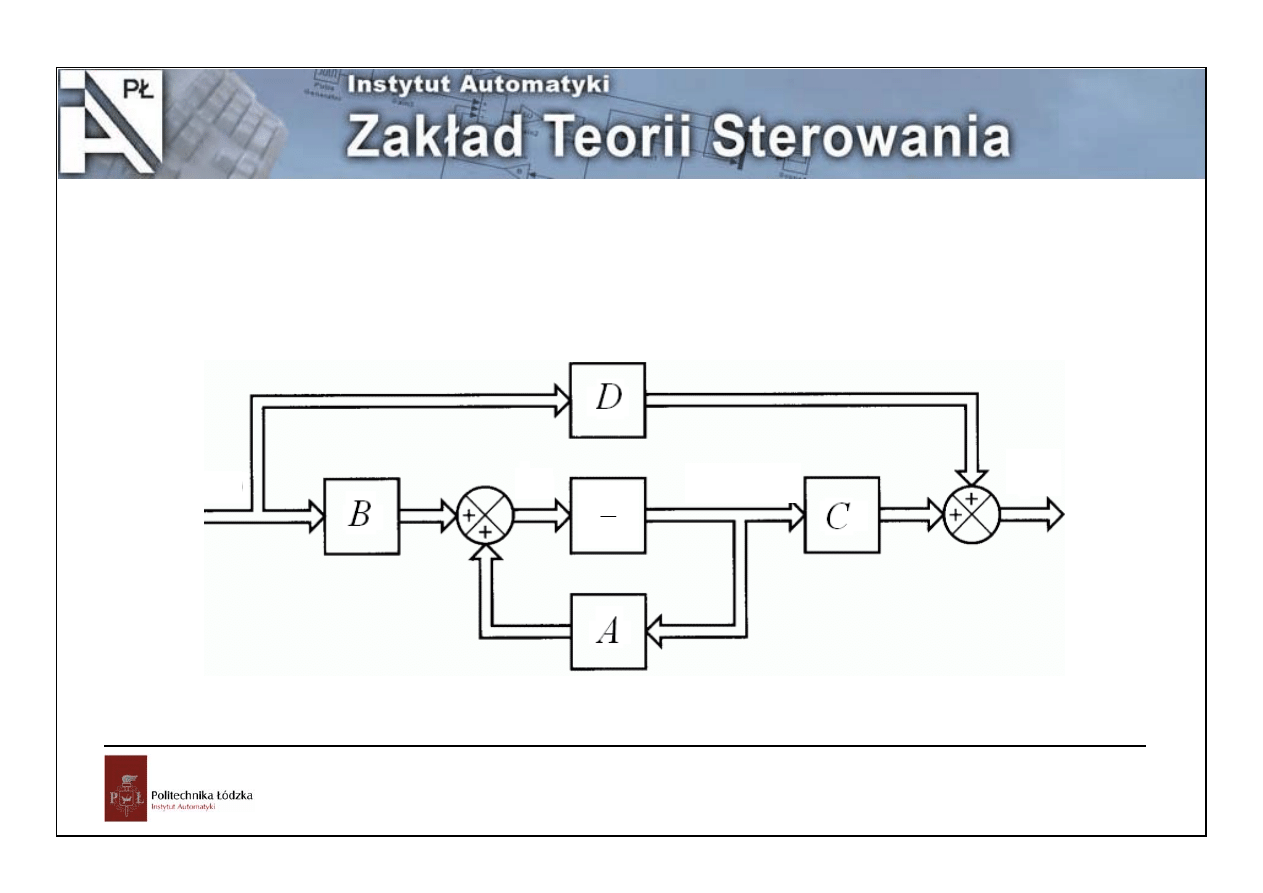
Opis układów dyskretnych w przestrzeni stanów
)
(
)
(
)
(
)
(
)
(
]
)
1
[(
kT
Du
kT
Cx
kT
y
kT
Bu
kT
Ax
T
k
x
+
=
+
=
+
20
Automatyka i sterowanie – układy dyskretne
1
z
u(kT)
x[(k+1)T]
y(kT)
x(kT)
Układ ciągły:
)
(
)
(
)
(
)
(
)
(
)
(
t
u
D
t
x
C
t
y
t
u
B
t
x
A
t
x
dt
d
c
c
c
c
c
c
+
=
+
=
poprzedzony ekstrapolatorem zerowego rzędu (odpowiedniego wymiaru) i impulsatorem:
∫
−
−
+
=
t
t
c
c
t
A
t
t
A
d
u
B
e
t
x
e
t
x
c
c
0
0
)
(
)
(
)
(
)
(
0
)
(
τ
τ
τ
)
(
)
(
,
)
1
(
,
0
kT
u
t
u
T
k
t
kT
t
c
=
+
=
=
∫
−
+
+
=
+
t
t
c
T
k
A
T
A
d
kT
u
B
e
kT
x
e
T
k
x
c
c
0
)
(
)
(
]
)
1
[(
}
}
)
1
{[(
τ
τ
21
Automatyka i sterowanie – układy dyskretne
∫
−
+
+
=
+
t
t
c
T
k
A
T
A
kT
u
B
d
e
kT
x
e
T
k
x
c
c
0
)
(
)
(
]
)
1
[(
}
}
)
1
{[(
τ
τ
∫
∫
=
=
=
−
+
T
c
A
t
t
c
T
k
A
T
A
B
d
e
B
d
e
B
e
A
c
c
c
0
)
)
1
((
0
,
τ
τ
τ
τ
gdy
0
det
≠
c
A
[
]
c
T
A
c
T
c
A
B
I
e
A
B
d
e
B
c
c
−
=
=
−
∫
1
0
τ
τ
22
Automatyka i sterowanie – układy dyskretne
0
)
det(
)
det(
)
(
≠
=
=
⇒
=
T
A
tr
T
A
T
A
c
c
c
e
e
A
e
A
Rozwiązanie:
)
(
)
(
]
)
1
[(
kT
Bu
kT
Ax
T
k
x
+
=
+
)
0
(
)
0
(
)
(
Bu
Ax
T
x
+
=
)
(
)
0
(
)
0
(
)
(
)
(
)
2
(
2
T
Bu
ABu
x
A
T
Bu
T
Ax
T
x
+
+
=
+
=
)
2
(
)
(
)
0
(
)
0
(
)
3
(
)
2
(
)
3
(
2
3
T
Bu
T
ABu
Bu
A
x
A
T
Bu
T
Ax
T
x
+
+
+
=
+
=
.....................................................................
23
Automatyka i sterowanie – układy dyskretne
]
)
[(
)
0
(
)
(
)
0
(
)
(
1
1
1
0
1
T
i
k
Bu
A
x
A
i
Bu
A
x
A
kT
x
k
i
i
k
k
i
i
k
k
−
+
=
+
=
∑
∑
=
−
−
=
−
−
Operatorowo
)
(
)
(
)
0
(
)
(
z
Bu
z
AX
zx
z
zX
+
=
−
(
) (
)
)
(
)
0
(
)
(
1
z
Bu
zx
A
zI
z
X
+
−
=
−
(
)
{
}
1
1
−
−
−
=
A
zI
z
Z
A
k
macierz tranzycyjna
(
)
{
}
1
1
1
−
−
−
−
=
A
zI
Z
A
k
(
) (
)
)
(
)
(
)
0
(
)
(
)
(
)
(
1
z
Du
z
Bu
zx
A
zI
C
z
Du
z
CX
z
Y
+
+
−
=
+
=
−
(
)
)
(
]
[
)
(
0
)
0
(
1
z
u
D
B
A
zI
C
z
Y
x
+
−
=
⇒
=
−
24
Automatyka i sterowanie – układy dyskretne
(
)
D
B
A
zI
C
z
G
+
−
=
−1
)
(
macierz transmitancji dyskretnych
Postać modalna rozwiązania:
A ma n różnych wartości własnych z
i
Macierzą przekształcenia przez podobieństwo do postaci diagonalnej jest macierz, której kolumnami są wektory
własne:
[
]
n
v
v
v
V
L
2
1
=
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎣
⎡
=
Λ
n
z
z
z
L
M
O
M
M
L
L
0
0
0
0
0
0
2
1
n
i
v
z
v
A
i
i
i
,
,
2
,
1 K
=
=
Λ
= V
AV
25
Automatyka i sterowanie – układy dyskretne
1
−
Λ
=
V
V
A
Λ
=
−
AV
V
1
1
2
1
1
2
−
−
−
Λ
=
Λ
Λ
=
V
V
V
V
V
V
A
1
3
1
1
2
3
−
−
−
Λ
=
Λ
Λ
=
V
V
V
V
V
V
A
.........................
1
−
Λ
=
V
V
A
k
k
,
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
Λ
k
n
k
k
k
z
z
z
L
M
O
M
M
L
L
0
0
0
0
0
0
2
1
⎥
⎥
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎢
⎢
⎣
⎡
=
=
−
T
n
T
T
w
w
w
W
V
M
2
1
1
:
( )
T
j
j
n
j
k
j
k
k
w
v
z
V
V
A
∑
=
−
=
Λ
=
1
1
26
Automatyka i sterowanie – układy dyskretne
( )
( )
]
)
[(
)
0
(
]
)
[(
)
0
(
)
(
1
0
1
1
0
1
T
i
k
Bu
w
v
z
x
w
v
z
T
i
k
Bu
A
x
A
kT
x
k
i
T
j
j
n
j
i
j
T
j
j
n
j
k
j
k
i
i
k
−
+
=
−
+
=
∑∑
∑
∑
=
=
−
=
=
−
( )
( )
]
)
[(
)
0
(
)
(
1
0
1
1
T
i
k
Bu
z
w
v
x
w
v
z
kT
x
i
j
k
i
n
j
T
j
j
T
j
j
n
j
k
j
−
+
=
−
=
=
=
∑
∑
∑
część swobodna
część wymuszona
27
Automatyka i sterowanie – układy dyskretne
Opis układu w przestrzeni stanów:
)
(
)
(
)
(
)
(
)
(
]
)
1
[(
kT
Du
kT
Cx
kT
y
kT
Bu
kT
Ax
T
k
x
+
=
+
=
+
x(kT) – wektor zmiennych stanu o wymiarze nx1,
u(kT) – wektor wejść/sterowań o wymiarze rx1
y(kT) – wektor wyjść o wymiarze mx1
wprowadzamy nowe zmienne stanu:
0
det
),
(
)
(
≠
=
P
kT
x
kT
Pq
)
(
)
(
]
)
1
[(
kT
Bu
kT
APq
T
k
Pq
+
=
+
nowe równanie stanu
)
(
)
(
)
(
kT
Du
kT
CPx
kT
y
+
=
nowe równanie wyjścia
)
(
)
(
]
)
1
[(
1
1
kT
Bu
P
kT
APq
P
T
k
q
−
−
+
=
+
nowe równanie stanu
28
Automatyka i sterowanie – układy dyskretne
)
(
)
(
)
(
kT
Du
kT
CPx
kT
y
+
=
nowe równanie wyjścia
B
P
B
AP
P
A
kT
u
B
kT
q
A
T
k
q
1
1
~
,
~
)
(
~
)
(
~
]
)
1
[(
−
−
=
=
+
=
+
CP
C
kT
Du
kT
x
C
kT
y
=
+
=
~
)
(
)
(
~
)
(
wartości własne
nowej macierzy stanu
są takie same
jak starej!!
Jaka będzie transmitancja:
[
]
)
(
)
(
)
(
)
(
)
(
~
)
~
(
~
)
(
~
1
1
1
1
1
1
1
1
1
1
1
z
G
D
B
A
zI
C
D
B
PP
A
zI
CPP
D
B
P
P
A
zI
P
CP
D
B
P
AP
P
zI
CP
D
B
A
zI
C
z
G
=
+
−
=
=
+
−
=
+
−
=
=
+
−
=
+
−
=
−
−
−
−
−
−
−
−
−
−
−
liniowe przekształcenie zmiennych stanu nie zmienia transmitancji!!
29
Automatyka i sterowanie – układy dyskretne
1
1
1
)
(
−
−
−
=
M
N
MN
bo
Document Outline
Wyszukiwarka
Podobne podstrony:
HYDROLOGIA 07 id 207788 Nieznany
ais 03 id 53431 Nieznany (2)
hih kolo kolo2 07 id 709394 Nieznany
I CSK 304 07 1 id 208210 Nieznany
Fizjologia Cwiczenia 07 id 1743 Nieznany
III CSK 302 07 1 id 210245 Nieznany
G2 PB 02 B Rys 3 07 id 185395 Nieznany
Bazy danych w03 07 id 81702 Nieznany
CwiczenieArcGIS 07 id 125941 Nieznany
ais 01 id 53429 Nieznany (2)
DAB 07 id 130775 Nieznany
III CZP 65 07 id 210286 Nieznany
ais 04 id 53433 Nieznany (2)
ais d05 id 53449 Nieznany (2)
ais d01 id 53441 Nieznany (2)
EGK 07 id 151005 Nieznany
06 07 id 418349 Nieznany (2)
ais d03 id 53445 Nieznany (2)
więcej podobnych podstron