1
Zakład Urządzeń Elektrycznych i Elektrotechniki Morskiej
Konspekty do Ćwiczeń z
LABORATORIUM
MODELOWANIE W SIMULINKU
2
LABORATORIUM „
Modelowanie w SIMULINKU
”
Cwiczenie № 1
Badania obcowzbudnej maszyny prądu stałego.
1. Cel pracy – Badania obcowzbudnej maszyny prądu stałego z wzbudzeniem szeregowym przy
prace silnikowej i generatorowej.
2. Wskazówki do pracy. Do wykonania pracy nałeży przystąpić po zapoznaniu się z literaturą:
•
Afonin A. Konspekt lekcje „Projektowanie układów elektromechanicznych w MATLABIE i
SIMULINKU. Wersja elektroniczna. ZUE i EM, In-t Elektrotechniki Politechniki
Szczecińskiej, 2003, 164 s.
•
Afonin A., Kramarz W., Cierzniewski P.: Elektromechaniczne przetworniki energii z
komutacją elektroniczna. Skrypt, seria „Tempus”, Szczecin - 2000, 242 s.
•
German-Gałkin S, Gnat K.: Ćwiczenia z Elektrotechniki w MATLABIE I SIMULINKU.
Wyższa Szkoła Morska, Szczecin - 2002.
•
Kosmol J.: Serwonapędy obrabiarek sterowanych numerycznie. WNT, W-wa, 1998, 308 s.
3. Zawartość pracy.
3.1. Wyznaczenie mechanicznych i oliczenia roboczych charakterystyk przy prace maszyny
elektrycznej w reżimie silnikowym.
3.2. Wyznaczenie mechanicznych i oliczenia roboczych charakterystyk przy prace maszyny
elektrycznej w reżimie generatorowym.
4. Wirtualny laboratoryjny układ.
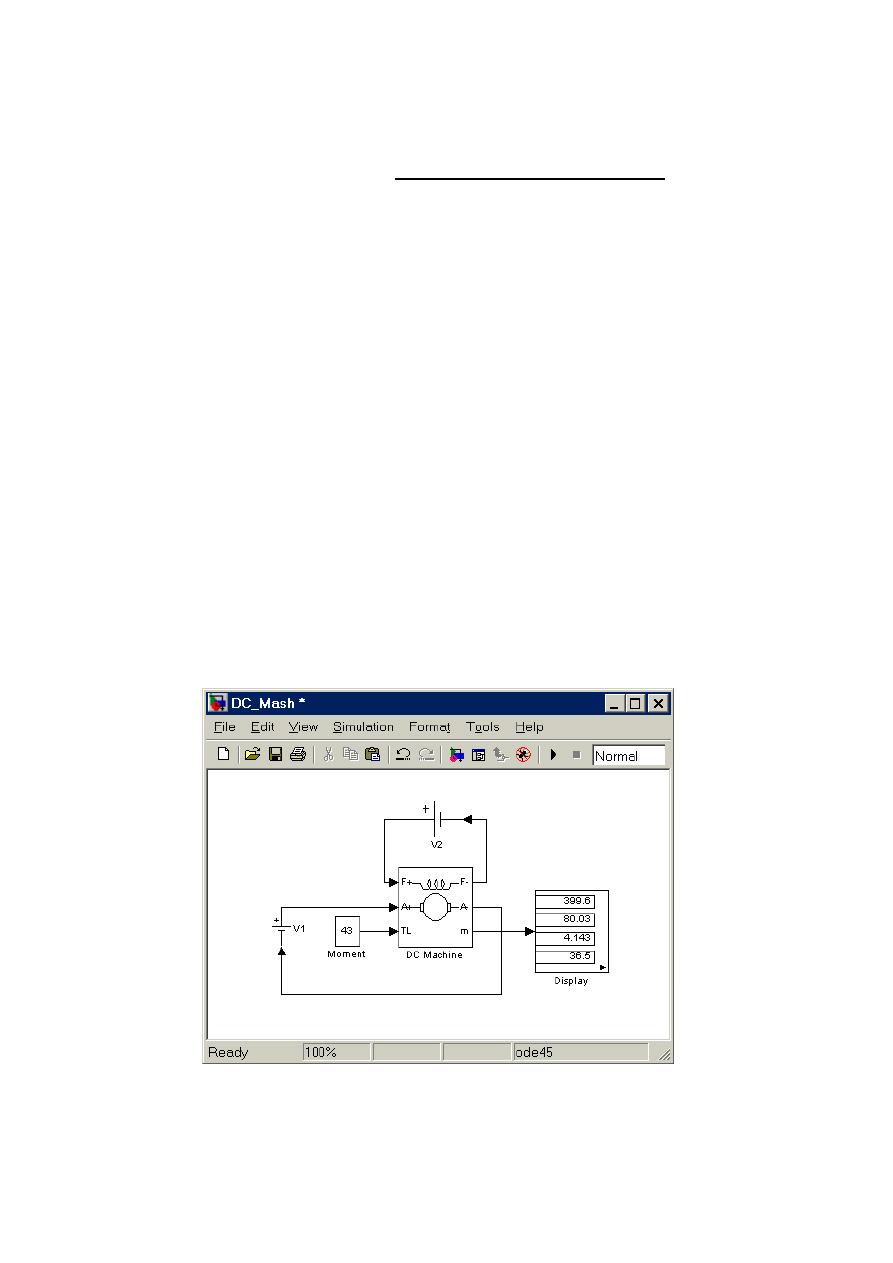
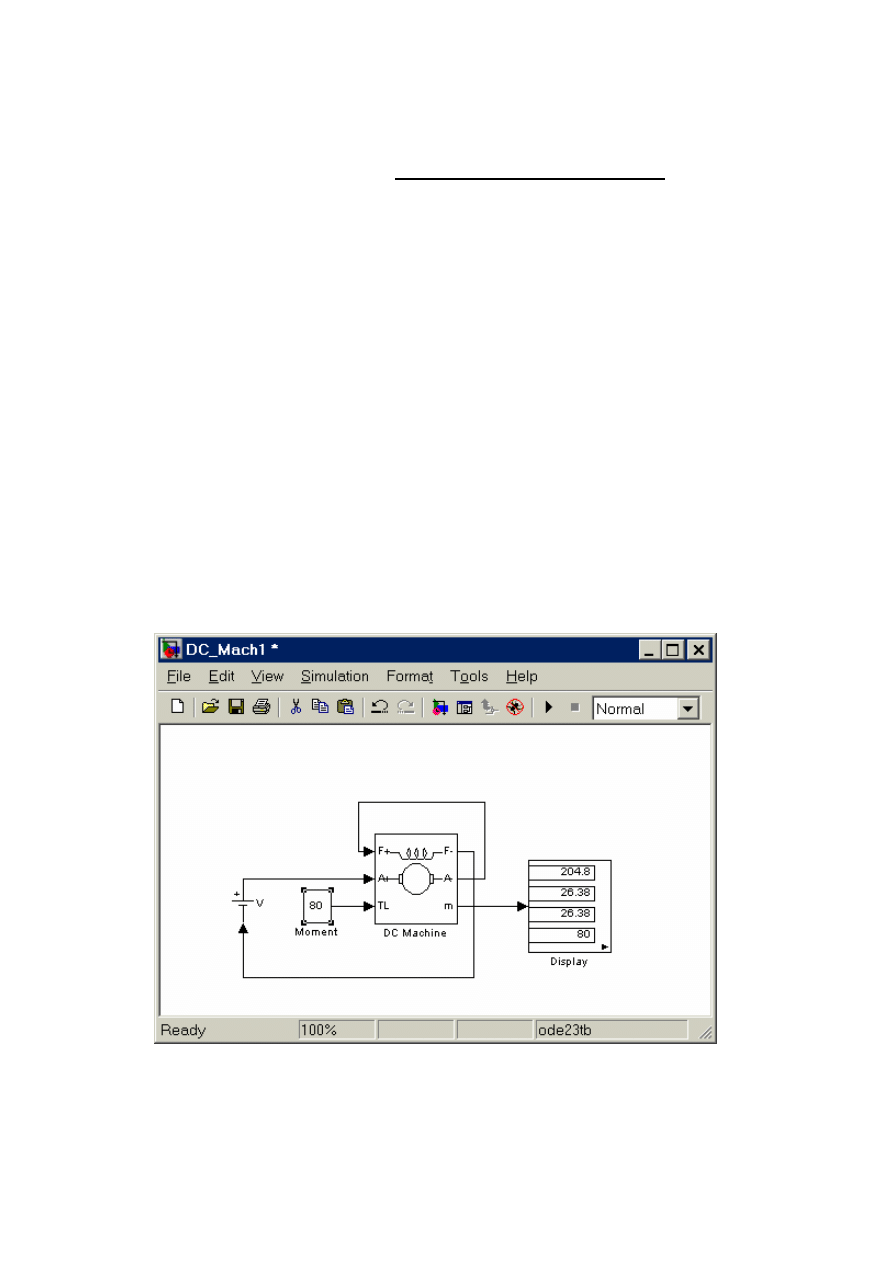
Wirtualny laboratoryjny układ pokazano na rys. 1.1.
Рис. 1.1. Model do badań obcowzbudnej maszyny prądu stałego
3
Model do badań maszyny obcowzbudnej prądu stałego zawiera żródła napięcia stałego (V1 dla
zasilania twornika maszyny – z biblioteki Power System Blockset/Electrical Sources), blok
Moment do zadania momentu obciążenia (blok Constant z biblioteki Simulink/Sources), własną
obcowzbudną maszynę prądu stałego (blok DC Machine z biblioteki Power System
Blockset/Machines), przyrząd do pomiaru zmiennych stanu maszyny - Display z biblioteki
Simulink/Sinks.
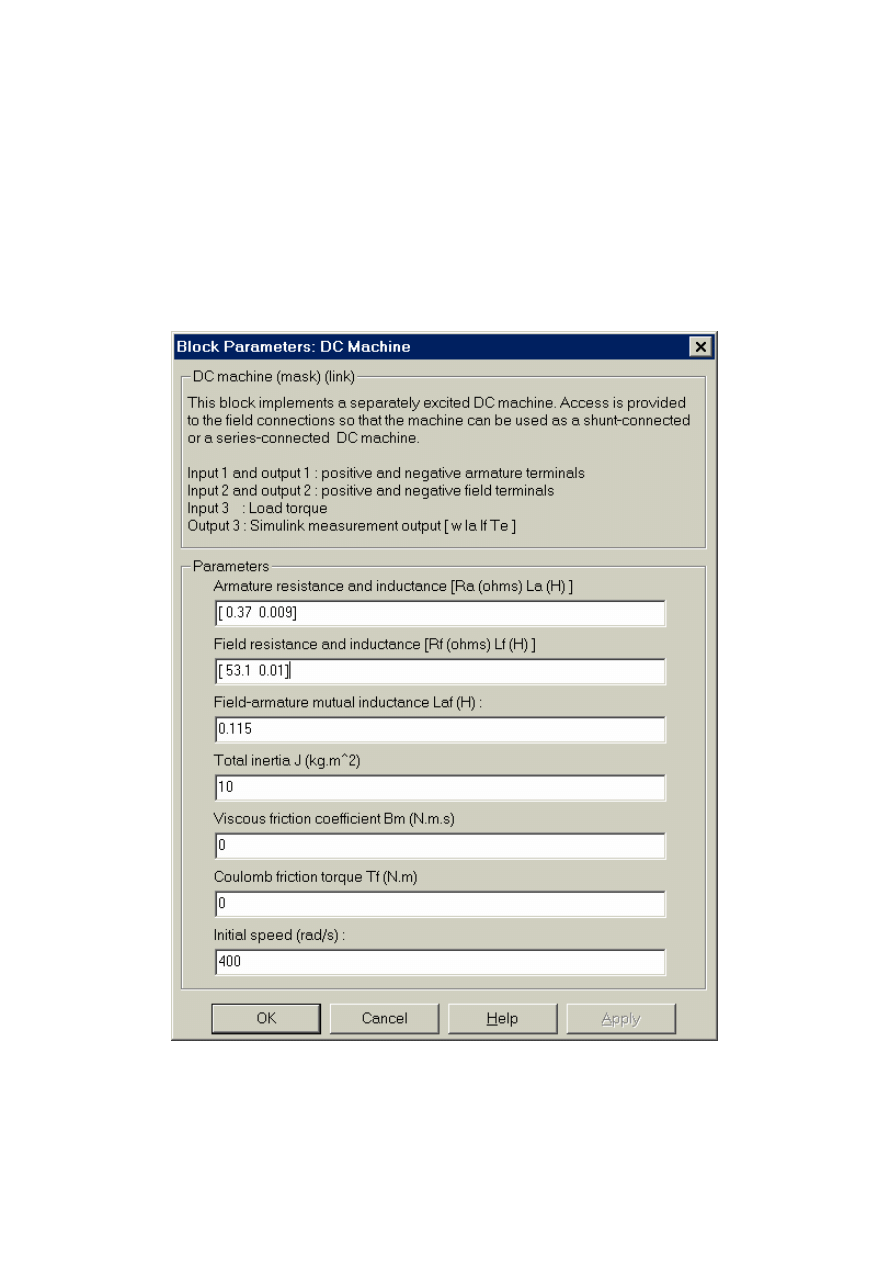
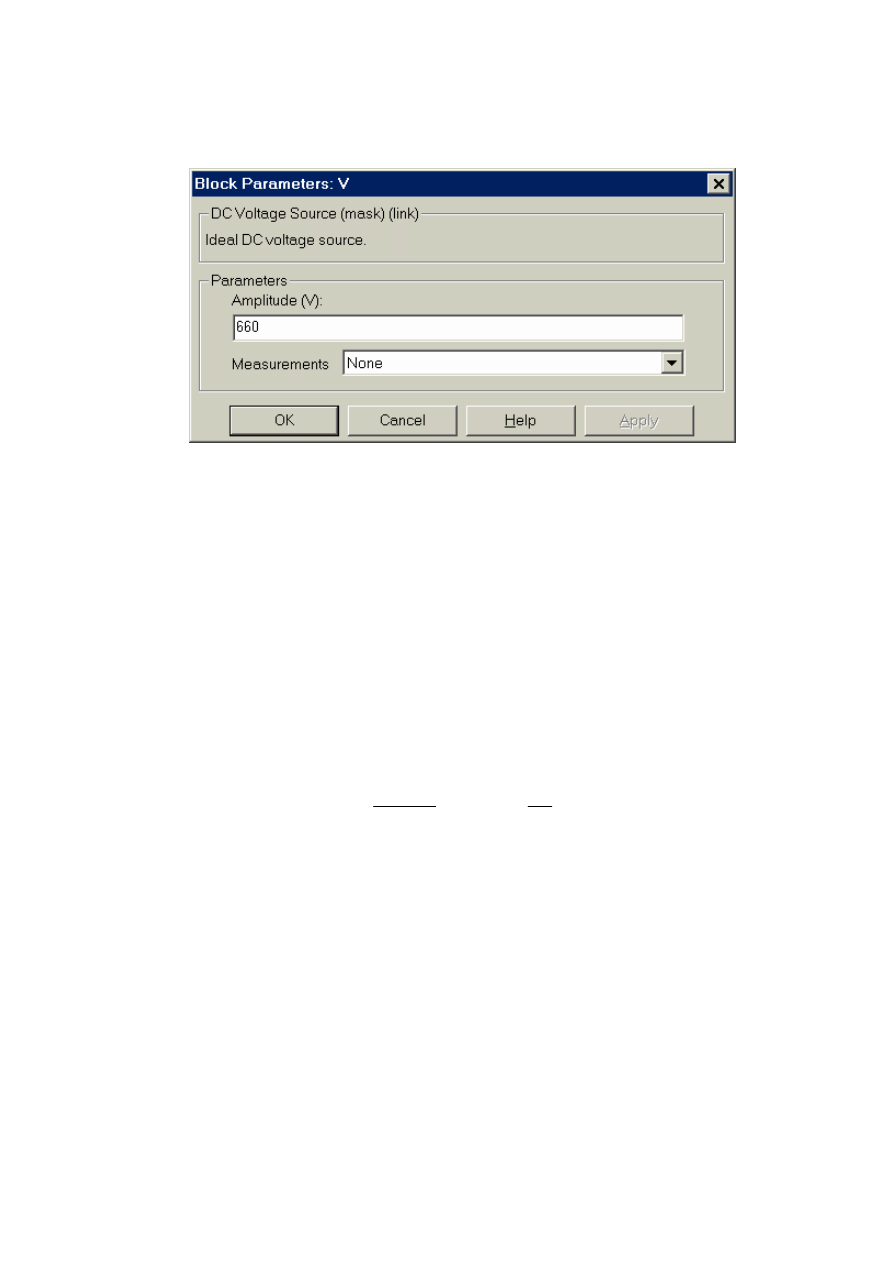
Okno dostrojenia parametrów obcowzbudnej maszyny prądu stałego pokazano na rys. 1.2, a okno
dostrojenia parametrów zródła zasilania.- na rys. 1.3.
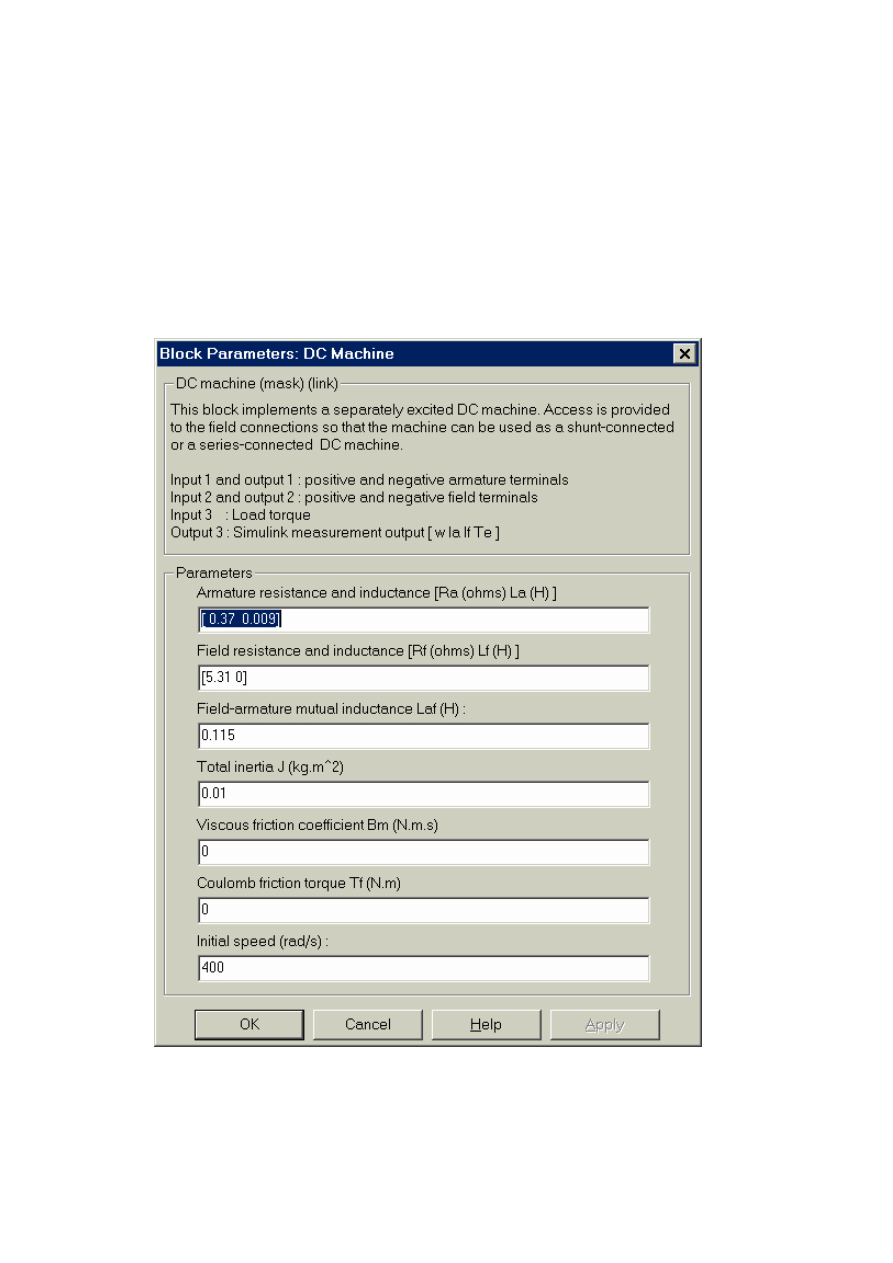
Rys. 1.2. Okno dostrojenia parametrów obcowzbudnej maszyny prądu stałego
4
Model pozwala przeprowadzić badania maszyn obcowzbudnych, bocznikowych i szeregowych.
Obwód twornika i wzbudzenia obserwowane z graficznego przedstawienia bloku, na wejście TL
jest doprowadzony moment obciążenia, wyjście m przeznaczono do pomiaru i obserwacji
zmiennych stanu maszyny w następnej kolejności: prędkość kątowa (rad/s), prąd twornika (А),
prąd wzbudzenia (А), moment elektromagnetyczny (Nm). W polach dostrojenia zadano:
-
Parametry uzwojeń twornika - Ra (Om) La (H);
-
Parametry uzwojeń wzbudzenia – Rf (Om),Lf (H);
-
współczynnik Laf;
-
wypadkowy moment bezwładności maszyny i moment obciążenia - J (kGm
2
).
współczynnik tarcia lepkiego - Bm (Nms);
-
współczynnik tarcia suchego – Tf (Nm);
-
prędkość poczatkowa.
Obliczenia parametru Laf wykonuje się poprzez kolejne rozwiązywanie równań:
w
w
R
Uw
I
=
,
nom
m
n
n
n
n
Р
Р
М
π
ω
30
=
=
,
w
an
n
an
I
U
Р
I
−
=
η
,
an
n
М
I
М
к
=
,
w
М
af
I
к
L
=
.
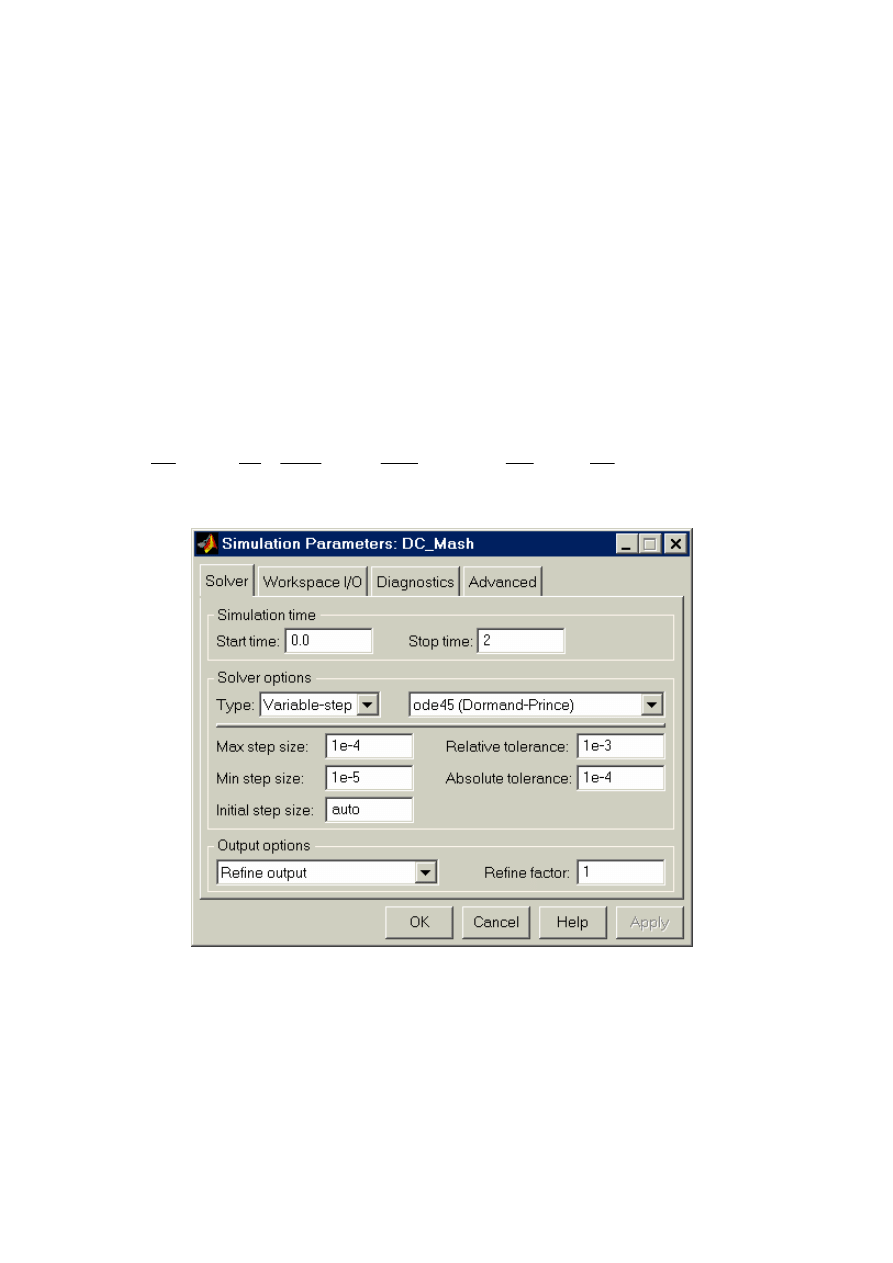
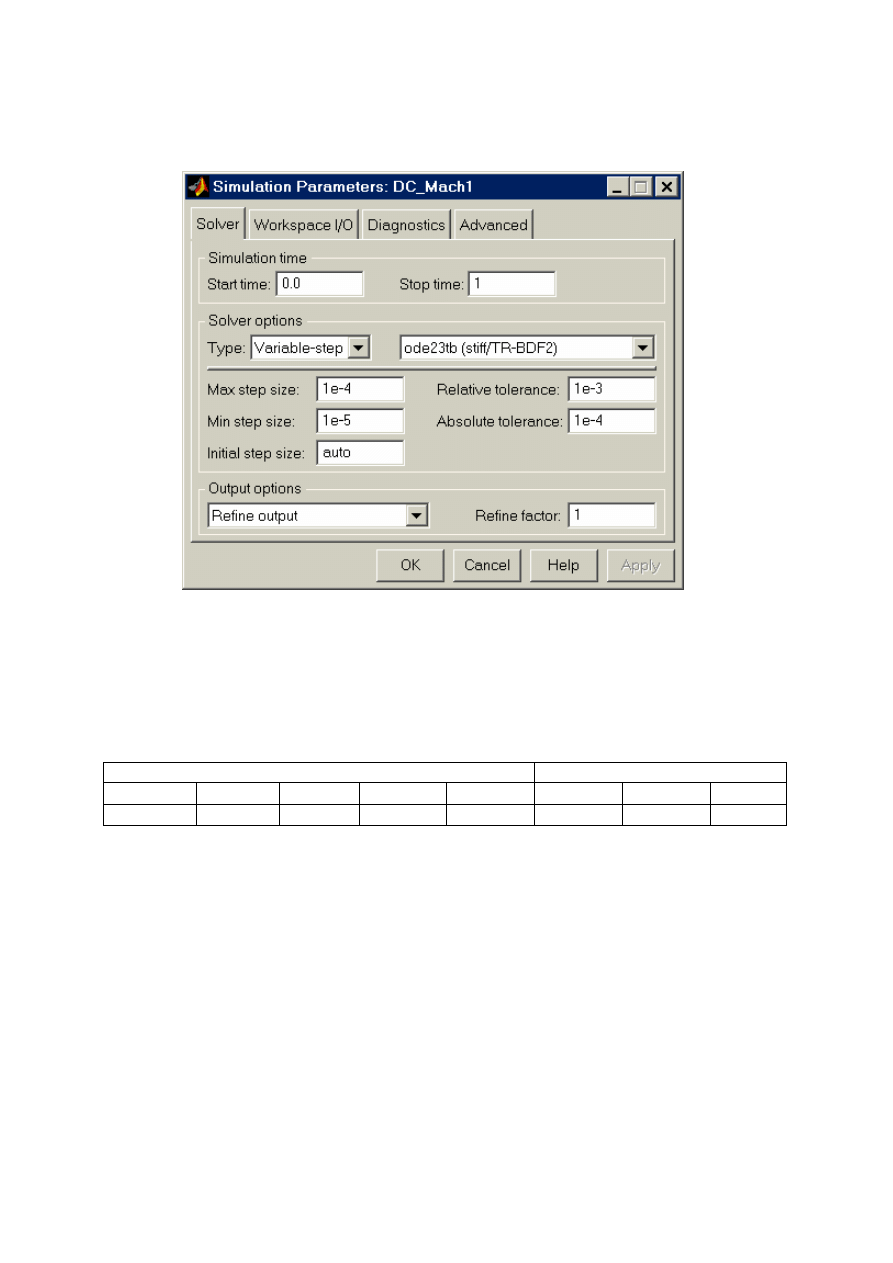
Okno dostrojenia parametrów symulacji pokazano na rys. 1.3.
Rys. 1.3. Okno dostrojenia parametrów symulacji
5. Kolejność wykonania ćwiczenia.
5.1. Parametry maszyny proponuje nauczyciel. Wykonuje się obliczenia wartości parametrów i
wypelnienie okien dostrojenia parametrów maszyny.
5.2. Zadanie parametrów symulacji.
5.3. Przy wyznaczeniu charakterystyk według p. 3.1 w oknie dostrojenia bloku Momentu z kolei
zadawano wartości momentu od 0.4 do 1.4 М
n
z interwałem. 0.2 М
n
.
5
5.4. Dla kazdej wartości momentu wykonuje się symulację i wypełnia się tabelę 1.1 z zawartością
obliczeniowych i zmierzonych parametrów.
Таbela 1.1
Pomiary
Obliczenia
М
n
(Nm)
ω
(rad/s)
I
a
(А)
I
w
(А)
М (Nm)
Р1 (W)
Р2 (W)
η
6. Spis treści sprawozdania.
6.1. Schemat modeli i opis bloków.
6.2 Zależności obliczeń parametrów maszyny elektrycznej.
6.3. Wzory obliczeń mocy Р1, Р2 i sprawności.
6.4. Wypełnienie tabeli.
6.5. Wykres charakterystyk mechanicznych maszyny elektrycznej w stanach pracy silnikowej i
generatorowej.
6.6. Wykresy charakterystyk roboczych maszyny elektrycznej w stanach pracy silnikowej i
generatorowej.
6
LABORATORIUM „
Modelowanie w SIMULINKU
”
Ćwiczenie № 2
Badania maszyny prądu stałego z wzbudzeniem szeregowym.
1. Cel pracy – Badanie maszyny prądu stałego z wzbudzeniem szeregowym podczas pracy
silnikowej.
2. Wskazówki do pracy. Do wykonania pracy należy przystąpić po zapoznaniu się z literaturą:
•
Afonin A. Konspekt lekcji „Projektowanie układów elektromechanicznych w MATLABIE i
SIMULINKU
. Wersja elektroniczna. ZUE i EM, In-t Elektrotechniki Politechniki
Szczecińskiej, 2003, 164 s.
•
Afonin A., Kramarz W., Cierzniewski P.: Elektromechaniczne przetworniki energii z
komutacją elektroniczna. Skrypt, seria „Tempus”, Szczecin - 2000, 242 s.
•
German-Gałkin S, Gnat K.: Ćwiczenia z Elektrotechniki w MATLABIE I SIMULINKU.
Wyższa Szkoła Morska, Szczecin - 2002.
•
Kosmol J.: Serwonapędy obrabiarek sterowanych numeryczne. WNT, W-wa, 1998, 308 s.
3. Treść pracy.
3.1. Wyznaczenie mechanicznych i roboczych charakterystyk maszyny elektrycznej podczas
pracy w reżimie silnika.
4. Wirtualny układ laboratoryjny.
Wirtualny układ laboratoryjny pokazano na rys. 2.1.
Рис. 2.1. Model do badań maszyny maszyny prądu stałego z wzbudzeniem szeregowym
podczas pracy silnikowej
7
Model do badań maszyny prądu stałego z wzbudzeniem szeregowym przy pracy silnikowej
zawiera źródło napięcia stałego (V1 dla zasilania maszyny – z biblioteki Power System
Blockset/Electrical Sources), blok Moment do zadania momentu obciążenia (blok Constant z
biblioteki Simulink/Sources), własną maszynę prądu stałego (blok DC Machine z biblioteki
Power System Blockset/Machines), przyrząd do pomiaru zmiennych stanu maszyny Display z
biblioteki Simulink/Sinks.
Okno dostrojenia parametrów maszyny prądu stałego pokazano na rys. 2.2, a okno dostrojenia
parametrów zródła zasilania.- na rys. 2.3.
Rys. 2.2. Okno dostrojenia parametrów maszyny prądu stałego
8
Rys. 2.3. Okno dostrojenia parametrów źródła zasilania
Model pozwala przeprowadzić badania maszyn obcowzbudnych, bocznikowych i szeregowych.
Obwód twornika i wzbudzenia obserwowane są z bloku graficznego przedstawiania , na wejście
TL jest doprowadzony moment obciążenia, wyjście m przeznaczono do pomiaru i obserwacji
zmiennych stanu maszyny w następującej kolejności: prędkość kątowa (rad/s), prąd twornika (А),
prąd wzbudzenia (А), moment elektromagnetyczny (Nm). W polach dostrojenia zadano:
-
parametry uzwojeń twornika - Ra (Om), La (H);
-
parametry uzwojeń wzbudzenia – Rf (Om),Lf (H);
-
współczynnik Laf;
-
wypadkowy moment bezwładności maszyny i moment obciążenia - J (kgm
2
).
współczynnik tarcia lepkiego - Bm (Nms);
-
współczynnik tarcia suchego – Tf (Nm);
-
prędkość poczatkową.
Obliczenia parametru Laf wykonuje się poprzez kolejne rozwiązywanie równań:
A
W
N
N
R
R
U
I
+
=
,
2
N
М
af
I
к
L
=
.
Okno dostrojenia parametrów symulacji pokazano na rys. 2.4.
5. Kolejność wykonywania ćwiczenia.
5.1. Parametry maszyny proponuje nauczyciel. Wykonuje się obliczenia wartości parametrów i
wypełnienie okien dostrojenia parametrów maszyny.
5.2. Zadanie parametrów symulacji.
5.3. Przy wyznaczeniu charakterystyk według p. 3.1 w oknie dostrojenia bloku Moment
zadawano wartości momentu od 0.4 do 4 М
n
ze skokiem 0.4 М
n
.
9
Rys. 2.4. Okno zadania parametrów symulacji
Dla każdej wartości momentu wykonuje się symulację i wypełnia się tabelę 2.1 wartościami
obliczeniowymi i pomiarowymi.
Таbela 2.1
Pomiary
Obliczenia
М
N
(Nm)
ω
(rad/s) I
A
(А)
I
W
(А)
М (Nm)
Р1 (W)
Р2 (W)
η
6. Spis treści sprawozdania.
6.1. Schemat modeli i opis bloków.
6.2 Zależności obliczeń parametrów maszyny elektrycznej.
6.3. Wzory obliczeń mocy Р1, Р2 i sprawności.
6.4. Wypełnione tabele.
6.5. Wykres charakterystyki mechanicznej maszyny elektrycznej.
6.6 Wykresy charakterystyk roboczych maszyny elektrycznej.

10
LABORATORIUM „
Modelowanie w SIMULINKU
”
Ćwiczenie № 3
Badania trójfazowego transformatora.
1. Cel pracy – Badania trójfazowego transformatora przy różnych schematach połączenia
uzwojeń pierwotnych i wtórnych.
2. Wskazówki do pracy. Do wykonania pracy nałeży przystąpić po zapoznaniu się z literaturą:
•
Afonin A. Konspekt wykładu „Projektowanie układów elektromechanicznych w MATLABIE
i SIMULINKU. Wersja elektroniczna. ZUE i EM, In-t Elektrotechniki Politechniki
Szczecińskiej, 2003, 164 s.
•
Afonin A., Kramarz W., Cierzniewski P.: Elektromechaniczne przetworniki energii z
komutacją elektroniczna. Skrypt, seria „Tempus”, Szczecin - 2000, 242 s.
•
German-Gałkin S, Gnat K.: Ćwiczenia z Elektrotechniki w MATLABIE I SIMULINKU.
Wyższa Szkoła Morska, Szczecin - 2002.
•
Kosmol J.: Serwonapędy obrabiarek sterowanych numerycznie. WNT, W-wa, 1998, 308 s.
3. Zawartość pracy.
3.1. Określenie charakterystyk trójfazowego transformatora przy schemacie połączenia
«gwiazda- gwiazda» (Y/Y).
3.2. Określenie charakterystyk trójfazowego transformatora przy schemacie połączenia
«gwiazda- trójkąt» (Y/
∆
).
3.3. Określenie charakterystyk trójfazowego transformatora przy schemacie połączenia
«trójkąt - trójkąt» (
∆
/
∆
).
3.4. Określenie charakterystyk trójfazowego transformatora przy schemacie połączenia
«trójkąt-gwiazda» (
∆
/Y).
4. Wirtualny układ laboratoryjny.
Wirtualny układ laboratoryjny pokazano na rys. 3.1.
Blok Multimeter przeznaczony jest do pomiarów prądów i napięcia transformatora. Wartości
odczytywane jest w oknie bloku Powergui. Okno dostrojenia parametrów trójfazowego
transformatora pokazano na rys. 3.2. Zawiera dwa dodatkowe pola:
•
Winding 1 (ABC) connection – schemat połączeń uzwojeń pierwotnych;
•
Winding 2 (abc) connection – schemat połączeń uzwojeń wtórnych.
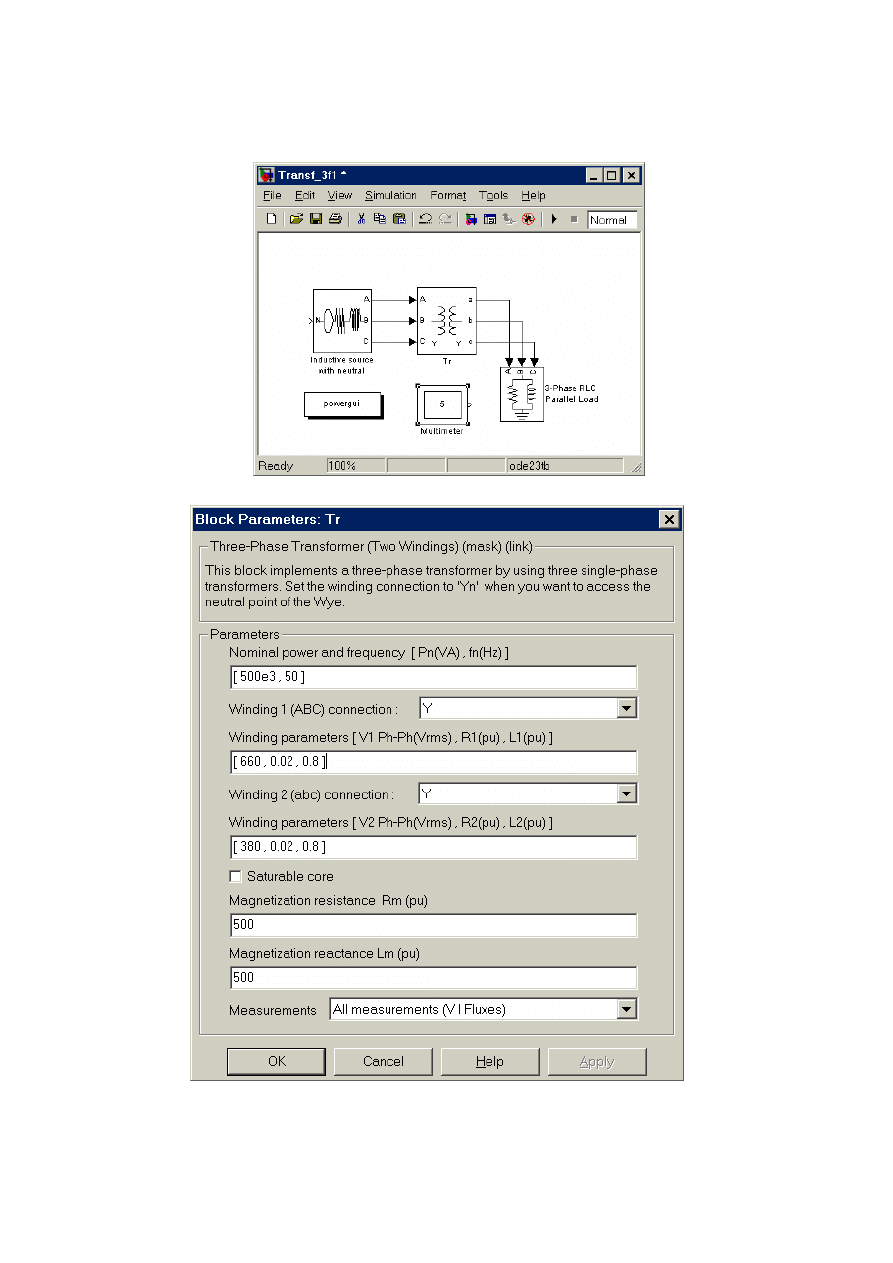
11
Rys. 3.1. Model trójfazowego transformatora
Rys. 3.2. Okno dostrojenia parametrów trójfazowego transformatora
12
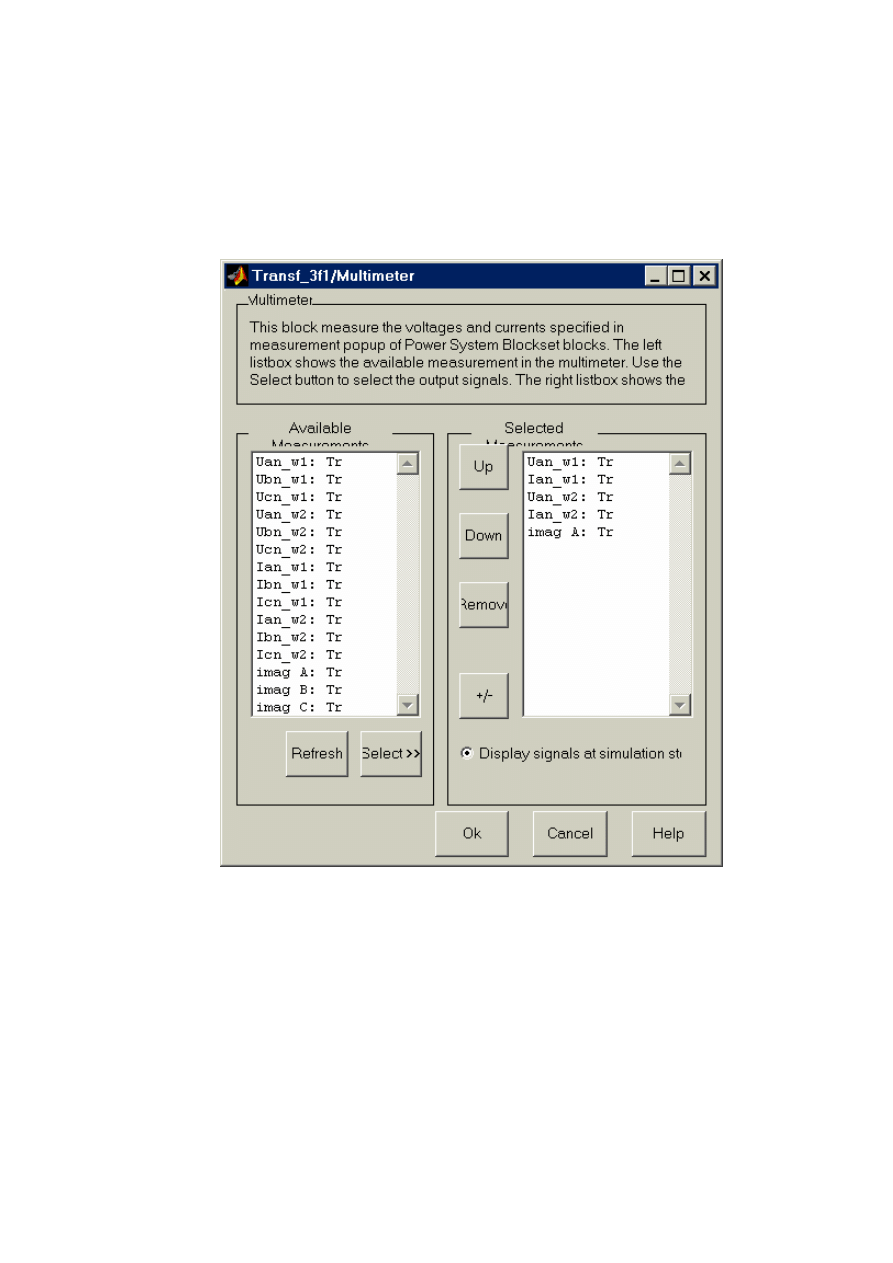
W menu pola zadawano schemat połączeń, a w polu Measurement wybierana jest opcja All
measurement (V I Fluxes), przy której można zmierzyć napięcia i prądy wszystkich uzwojeń a
także prądy magnesowania pierwotnych uzwojeń.
Okno bloku Multimeter pokazano na rys. 3.3.
Рис. 3.3. Okno bloku Multimeter
W lewym polu obecne zmienne stanu transformatora, stany pokazano w oknie bloku Powergui po
prowadzeniu symulacji. W prawym oknie przyciskiem Select przeniesiono zmienne dla
obserwacji. Włączony flag “Display signals at simulation stop” zabezpiecza graficzne wyjście
wybranych zmiennych przy symulacji.
13
5. Kolejność wykonania ćwiczenia..
Kolejność prowadzenia ćwiczeń laboratoryjnych zgodnie ze wszystkimi punktami 3.1-3.4
pozostaje stała. Parametry źródła zasilania transformatora wybierane są przez nauczyciela.
Podczas pracy samodzielnej mogą one być zgodne z pokazanymi na rys. 3.2, 3.4, 3.5.
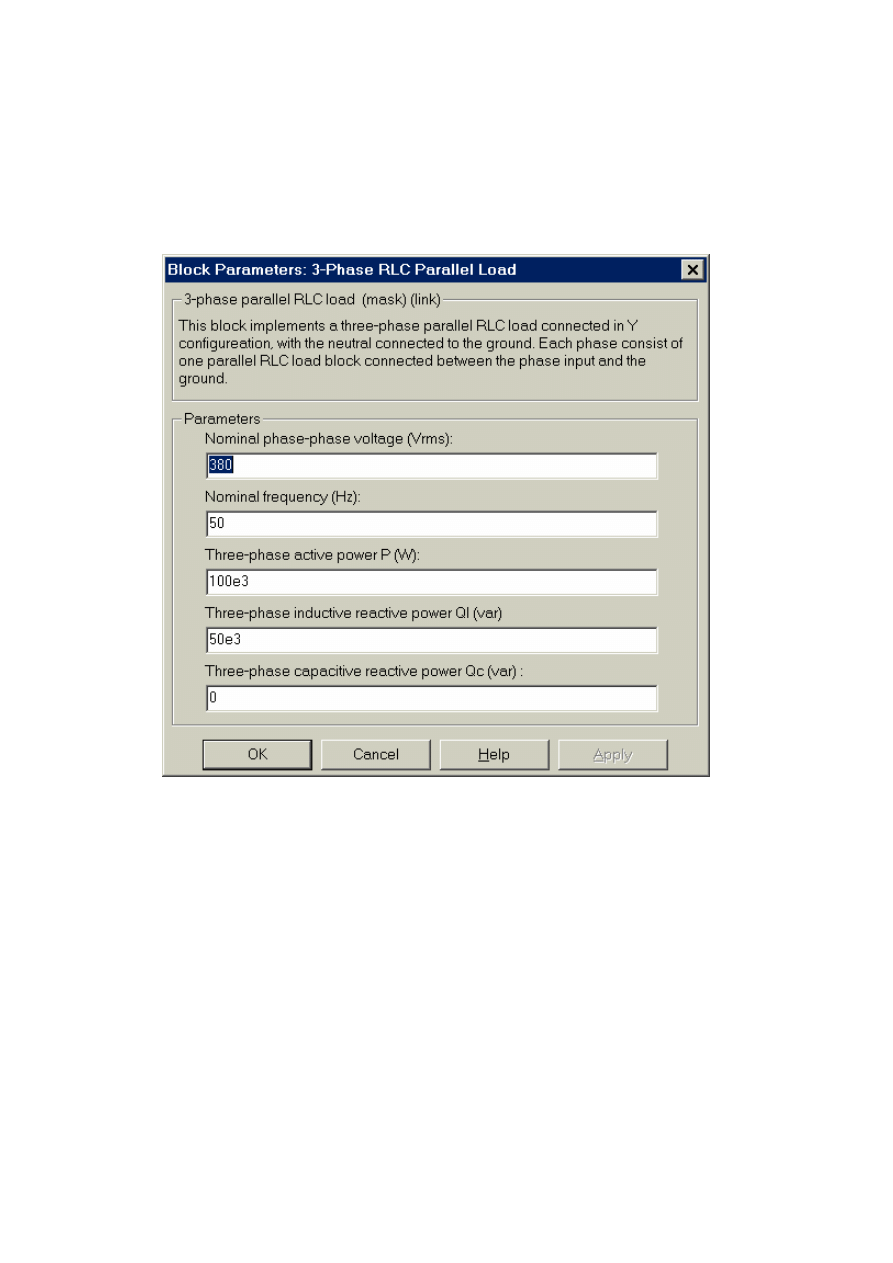
Rys. 3.4. Okno zadania parametrów obciążenia
14
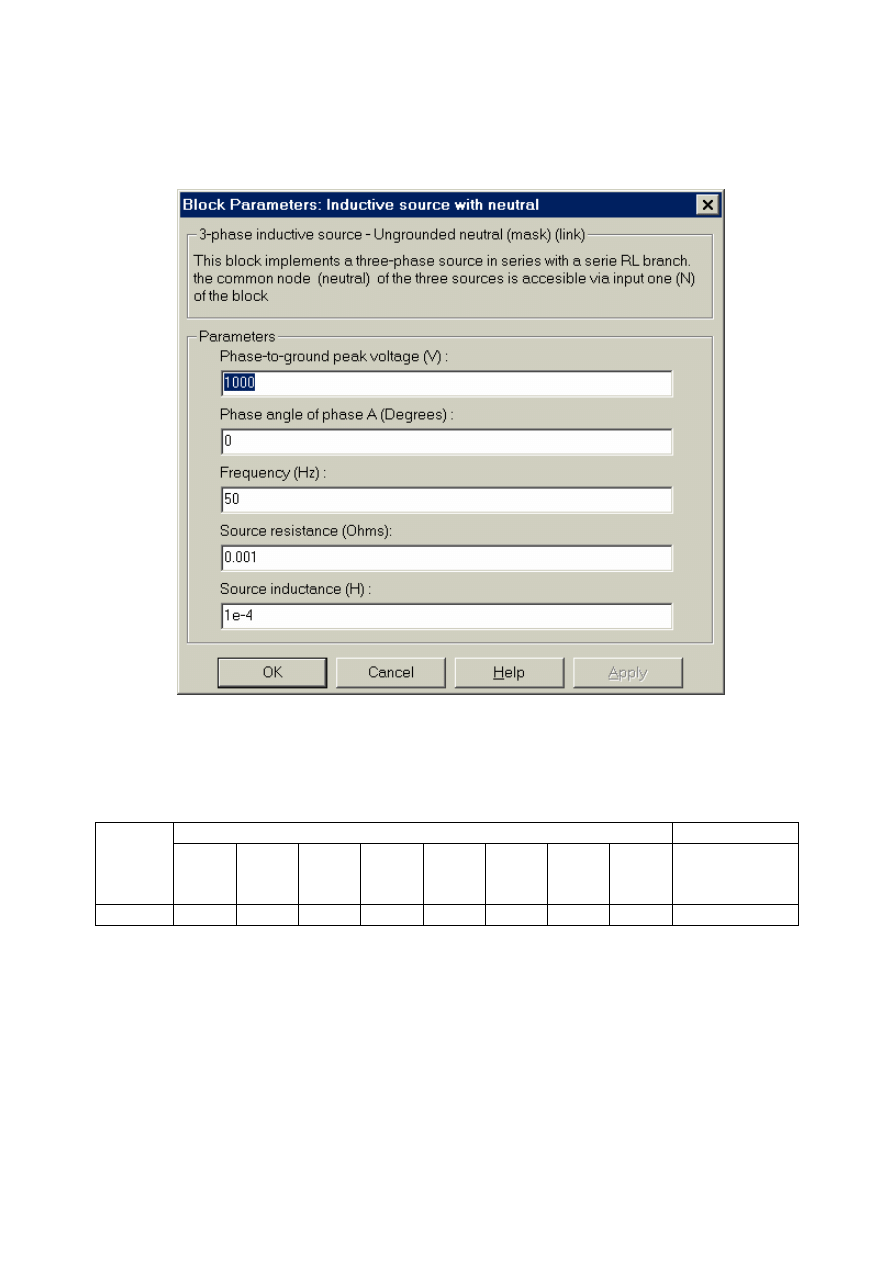
Rys.3.5. Okno dostrojenia parametrów źródła trójfazowego
Dla każdego punktu (3.1-3.4) wykonywana jest symulacja i dla każdej fazy wypełnia się tabelę
3.1.
Таbela 3.1
Pomiary w fazie
Obliczenia
Schemat
połączeń
U1f
1
U
ϕ
I1ф
1
I
ϕ
U2f
2
U
ϕ
I2f
2
I
ϕ
Współczynnik
transformacji
V
grad
А
grad
V
grad
А
grad
Do tabeli 3.1 wprowadzono napięcie fazowe, prądy i ich fazą początkową.
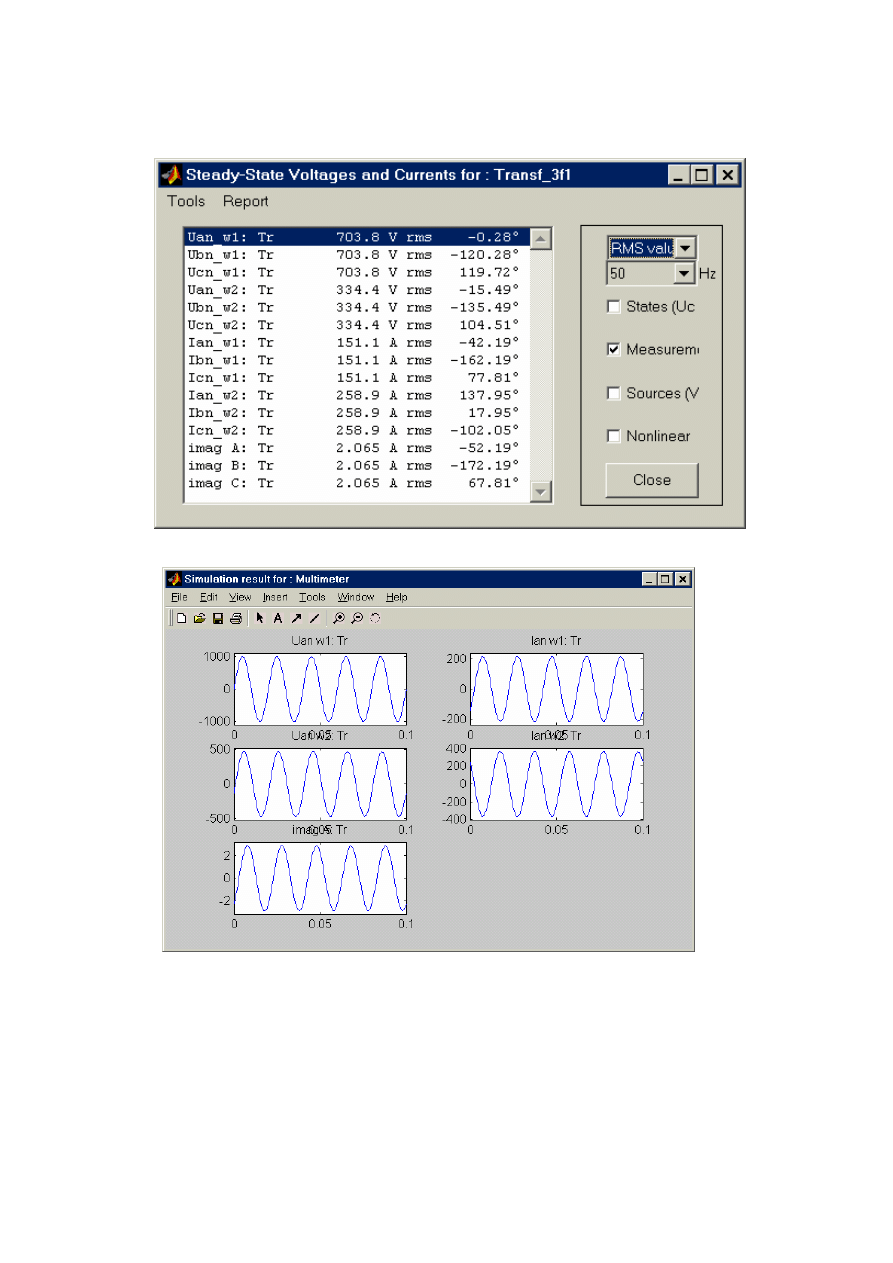
Na rys.3.6 pokazano okno bloku Powergui z wynikami symulacji przy schemacie połączeń
«gwiazda- gwiazda».
Na rys.3.7 przedstawiono wyniki w postaci graficznej bloku Multimeter.
15
Rys. 3.6. Wyniki symulacji przy schemacie połączeń uzwojeń Y/Y
Rys.3.7. Wyniki symulacji w oknie bloka Multimeter
6. Zawartość sprawozdania.
6.1. Schemat modeli i opis wirtualnych bloków.
6.2. Wypełnienie tabeli.
6.3. Diagram wektorowy.

16
LABORATORIUM „
Modelowanie w SIMULINKU
”
Ćwiczenie № 4
Badania generatora synchronicznego.
1. Cel pracy – Badania generatora synchronicznego ze wzbudzeniem elektromagnetycznym przy
pracy z obciążeniem biernym.
2. Wskazówki do pracy. Do wykonania pracy nałeży przystąpić po zapoznaniu się z literaturą:
•
Afonin A. Konspekt wykładu „Projektowanie układów elektromechanicznych w MATLABIE
i SIMULINKU. Wersja elektroniczna. ZUE i EM, In-t Elektrotechniki Politechniki
Szczecińskiej, 2003, 164 s.
•
Afonin A., Kramarz W., Cierzniewski P.: Elektromechaniczne przetworniki energii z
komutacją elektroniczna. Skrypt, seria „Tempus”, Szczecin - 2000, 242 s.
•
German-Gałkin S, Gnat K.: Ćwiczenia z Elektrotechniki w MATLABIE I SIMULINKU.
Wyższa Szkoła Morska, Szczecin - 2002.
•
Kosmol J.: Serwonapędy obrabiarek sterowanych numerycznie. WNT, W-wa, 1998, 308 s.
3. Zawartosć pracy.
3.1. Wyznaczenie charakterystyk biegu jalowego.
3.2. Budowa zewnętrznej (obciążenia) charakterystyki generatora przy obciążeniu czynnym.
3.3. Budowa zewnętrznej (obciążeniowej) charakterystyki generatora przy obciążeniu czynno-
indukcyjnym.
3.4. Budowa zewnętrznej (obciążeniowej) charakterystyki generatora przy obciążeniu czynno-
pojemnościowym.
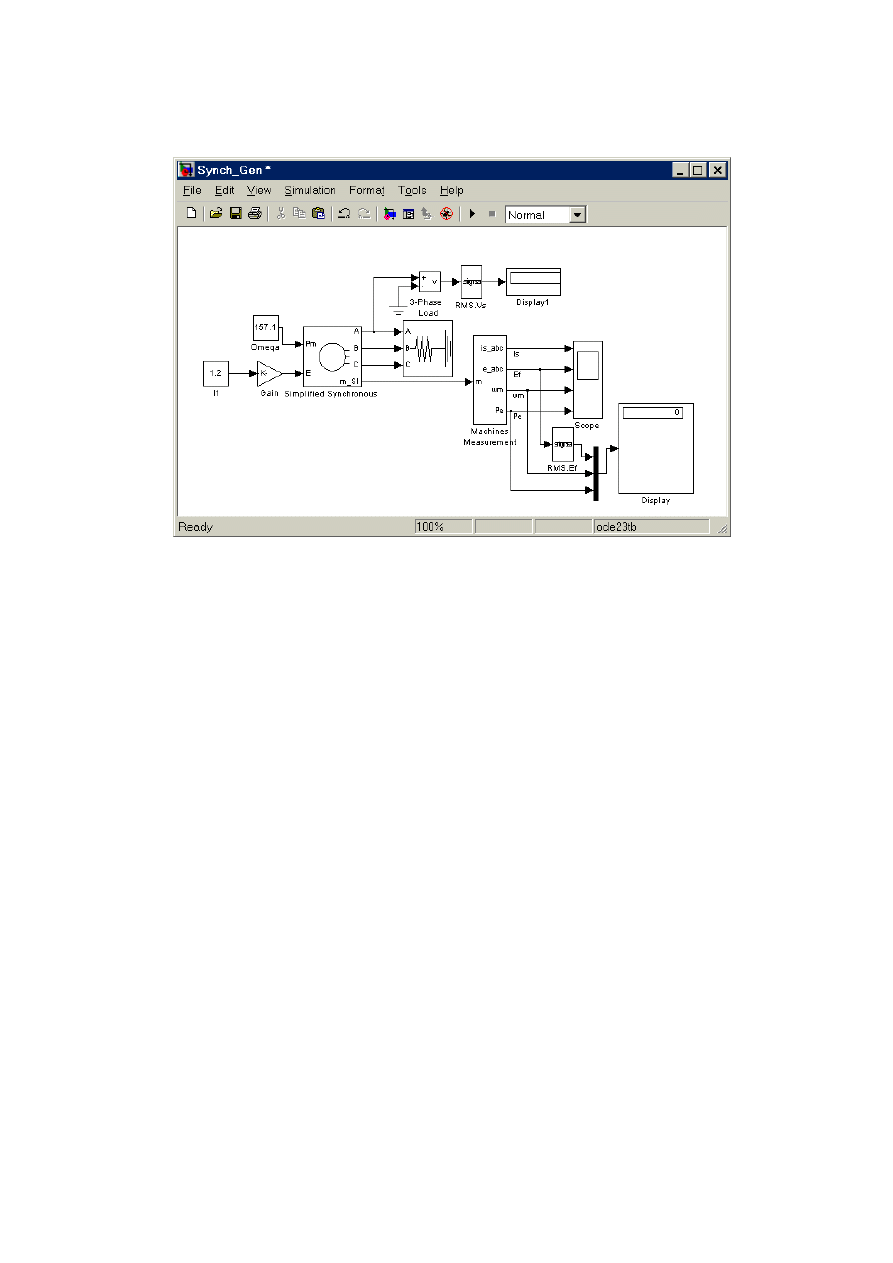
4. Wirtualny układ laboratoryjny .
Wirtualny układ laboratoryjny pokazano na rys. 4.1.
Układ zawiera:
-
Trójfazową maszyną synchroniczną Simplified Synchronous Machine z biblioteki Power
System Blockset /Machines;
-
Przyrząd pomiarowy stanów maszyny Machines Measurement z biblioteki Power System
Blockset / Machines;
-
Trójfazowe obciążenie 3-Phase Load z biblioteki Power System Blockset / Extras / Three-
Phase Library;
-
bloki RMS.Vs, RMS.Ef do pmiarów wartości skutecznej napięcia na obciążeniu i SEM
wzbudzenia maszyny;
-
wzmacniacz Gain z głównej biblioteki Simulink/Math;
-
bloki Display dla ilościowego przedstawienia wartości zmierzonych oraz blok Scope dla
obserwacji SEM wzbudzenia, prędkości i mocy elektromagnetycznej maszyny
synchronicznej z głównej biblioteki Simulink/Sinks;
-
bloki Omega, If dla zadania prędkości maszyny synchronicznej i prądu wzbudzenia
maszyny z głównej biblioteki Simulink/Source;
-
blok Mux, łączący trzy sygnały w jeden wektorowy z głównej biblioteki
Simulink/Sygnal & System.
17
Rys. 4.1. Wirtualny układ laboratoryjny
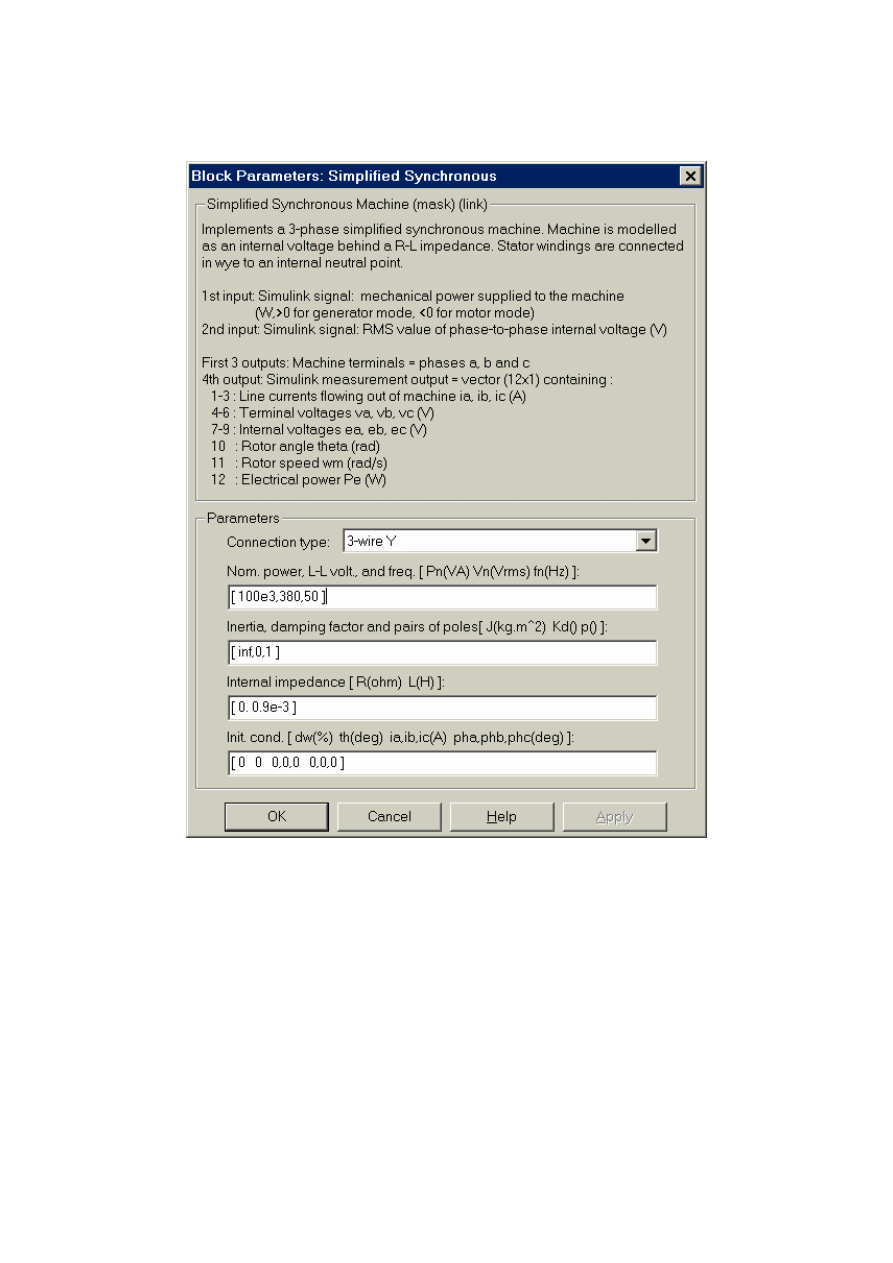
Okno dostrojenia parametrów maszyny synchronicznej pokazano na rys. 4.2.
W polach okna dostrojenia parametrów maszyny synchronicznej kolejno wprowadza się:
-
rezystancję czynną uzwojeń stojana (Om);
-
schemat połączeń uzwojeń stojana maszyny. W menu pola można wybrać połączenie w
gwiazdę bez zerowego lub z zerowym przewodem;
-
moc całkowita (VА), wartość skuteczną liniową napięcia i częstotliwość;
-
moment bezwładności (kgm
2
), współczynnik tłumienia, liczba par biegunów;
-
а uzwojeń stojana i indukcyjność uzwojenia stojana;
-
początkowe warunki przy rozruchu modelu.
18
Рис. 4.2. Okno dostrojenia parametrów maszyny synchronicznej
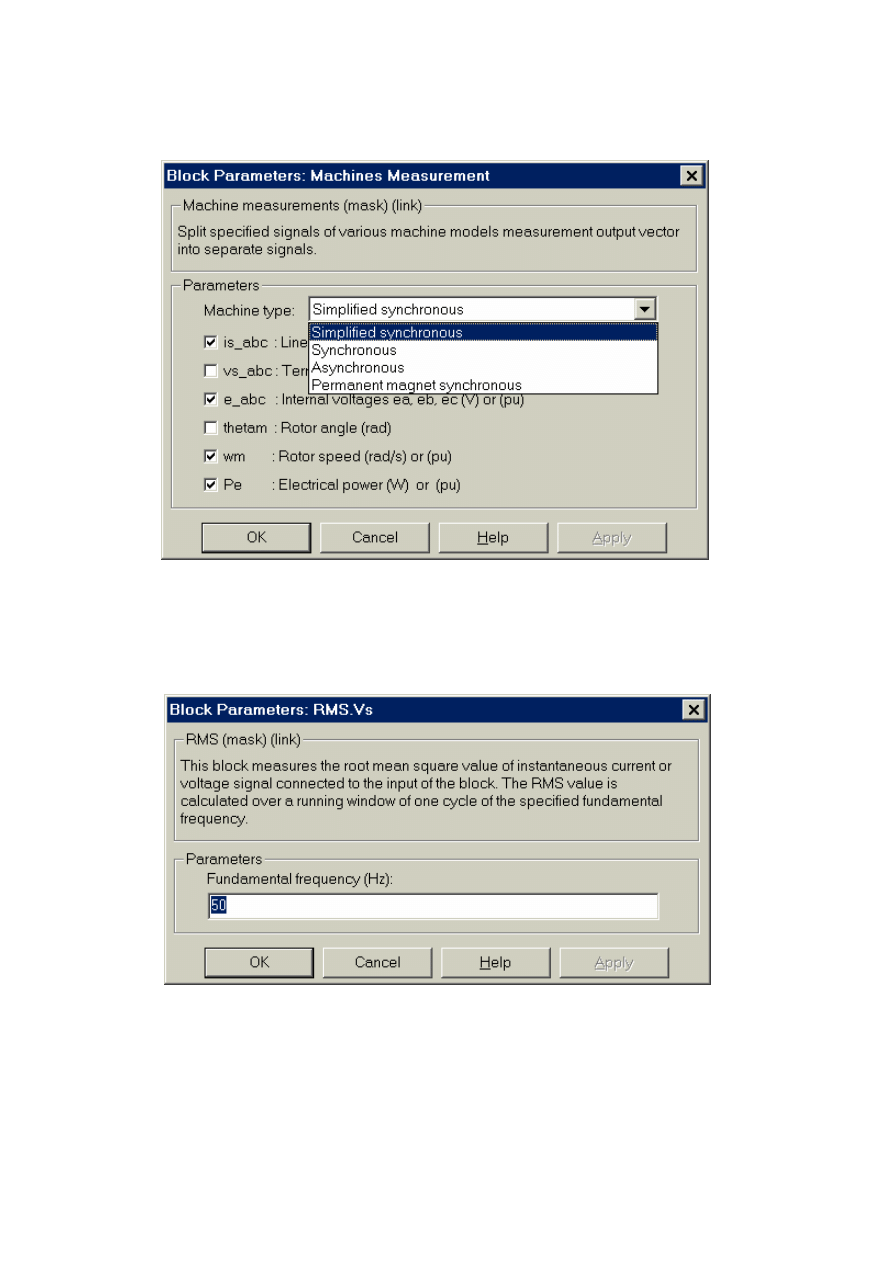
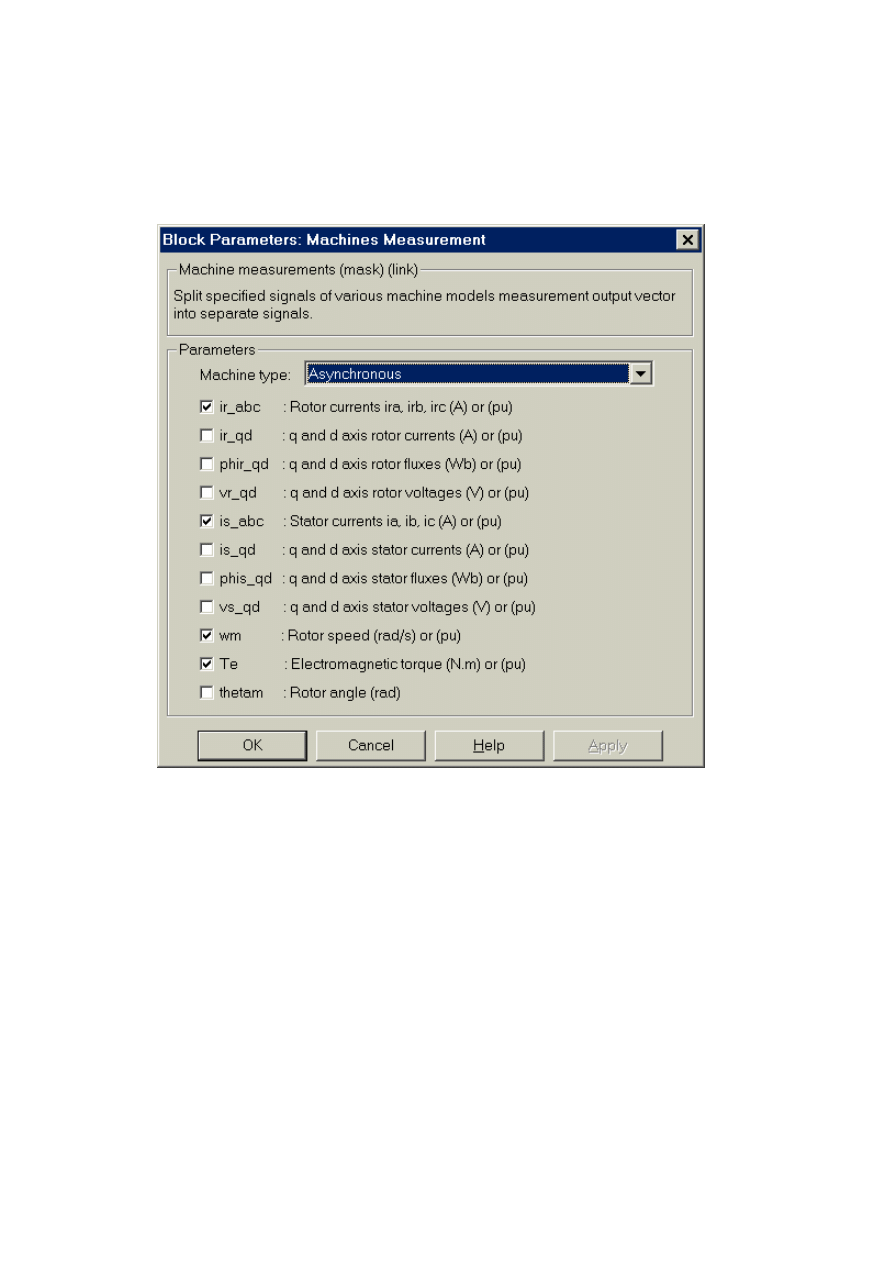
Okno dostrojenia pomiaru zmiennych stanu maszyny pokazano na rys. 4.3.
Typ maszyny wybiera się w polu Machine type. Flagi z lewej strony włączone dla tych
zmiennych stanu, które podlegają pomiarom.
19
Rys. 4.3. Okno dostrojenia pomiaru zmiennych stanu maszyny
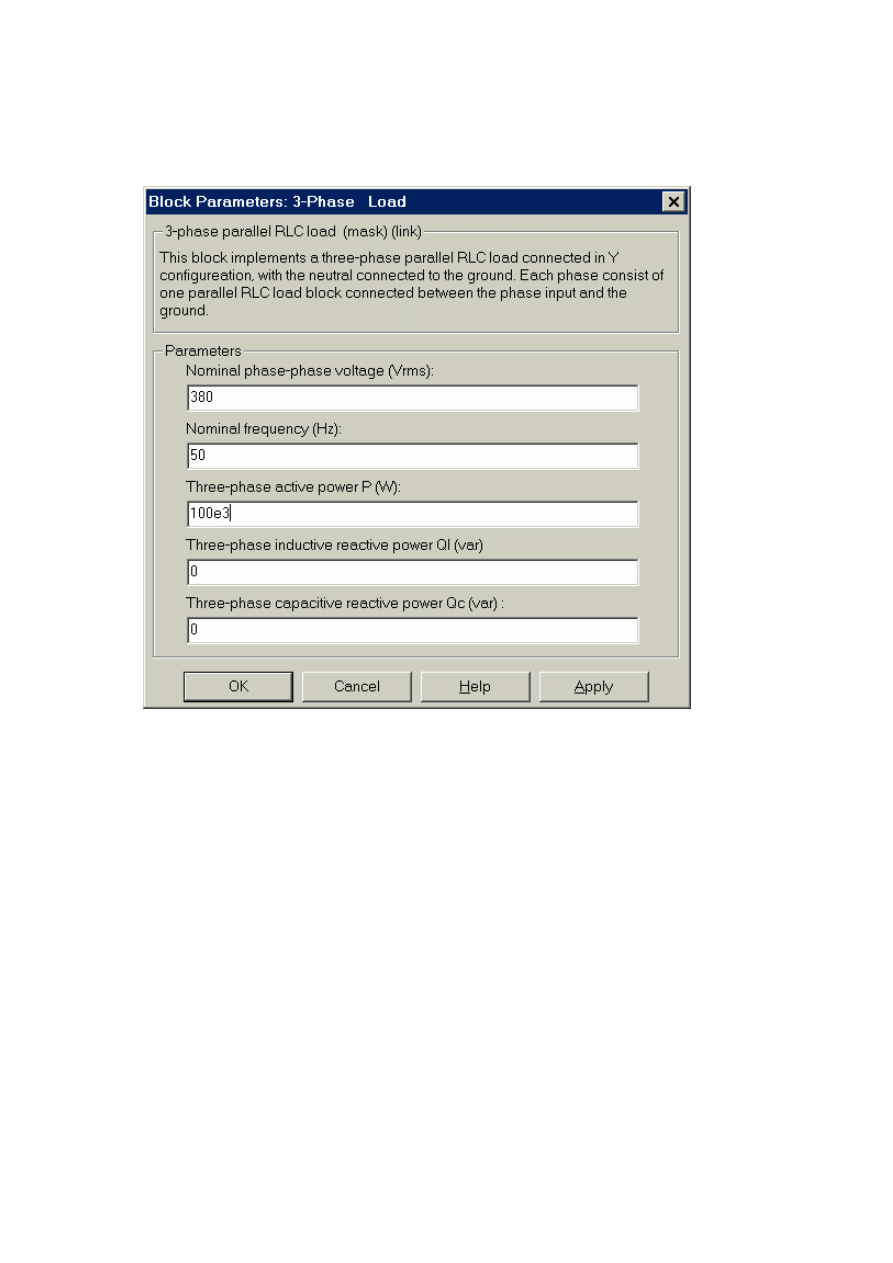
Blok dostrojenia pomiarów wartości skutecznej maszyny pokazano na rys. 4.4. W oknie
dostrojenia bloku wprowadza się częstotliwość, przy której wykonuje się pomiary.
Рис. 4.4. Okno dostrojenia pomiarów wartości skutecznej maszyny
20
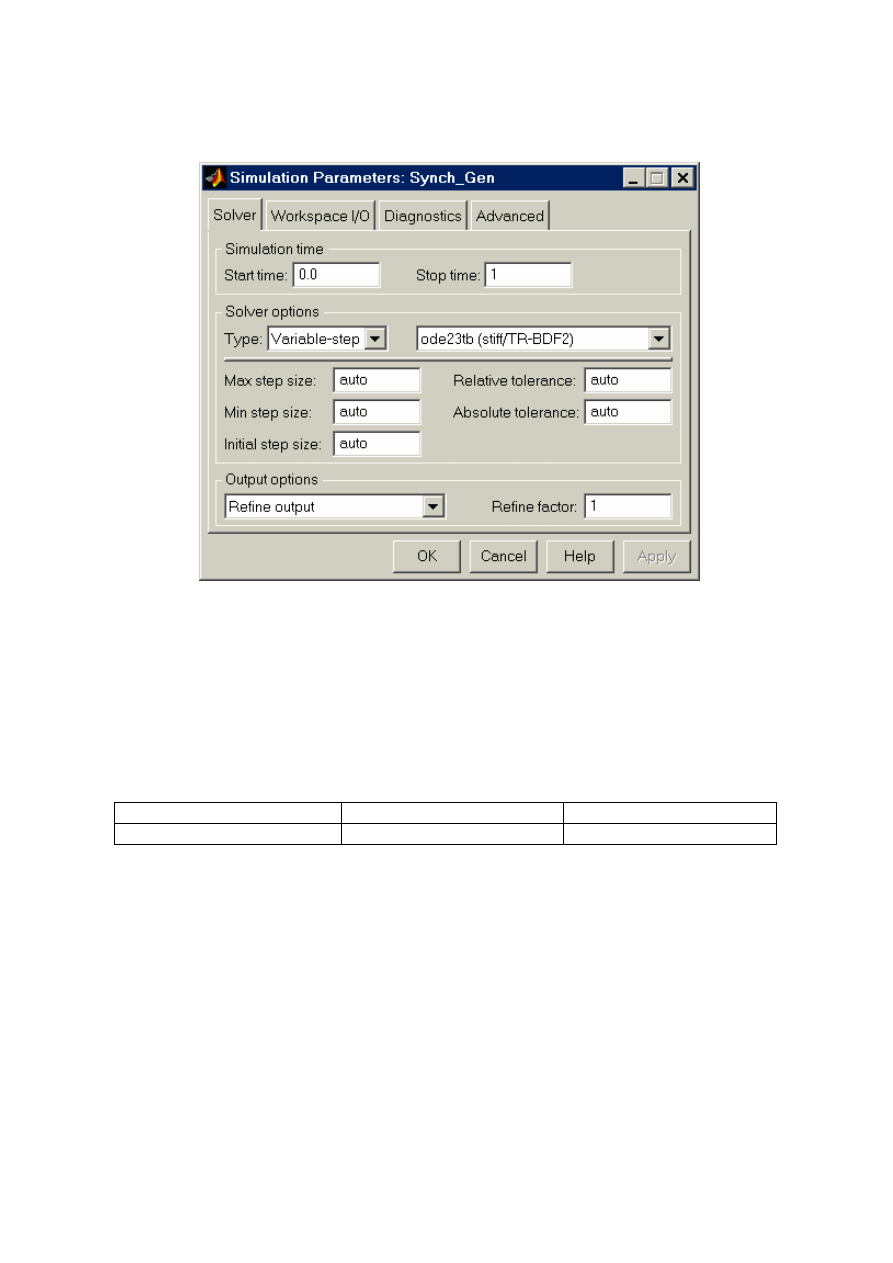
Okno dostrojenia parametrów obciążenia pokazano na rys. 4.5.
Rys. 4.5. Okno dostrojenia parametrów obciążenia
W polach okna wprowadza się wartość skuteczną liniową i częstotliwość, czynną i bierną
(indukcyjna i pojemnościowa) moc obciążenia.
5. Kolejność wykonania ćwiczenia.
Parametry maszyny synchronicznej, źródeł zasilania i bloku Gain zadawane są przez nauczyciela.
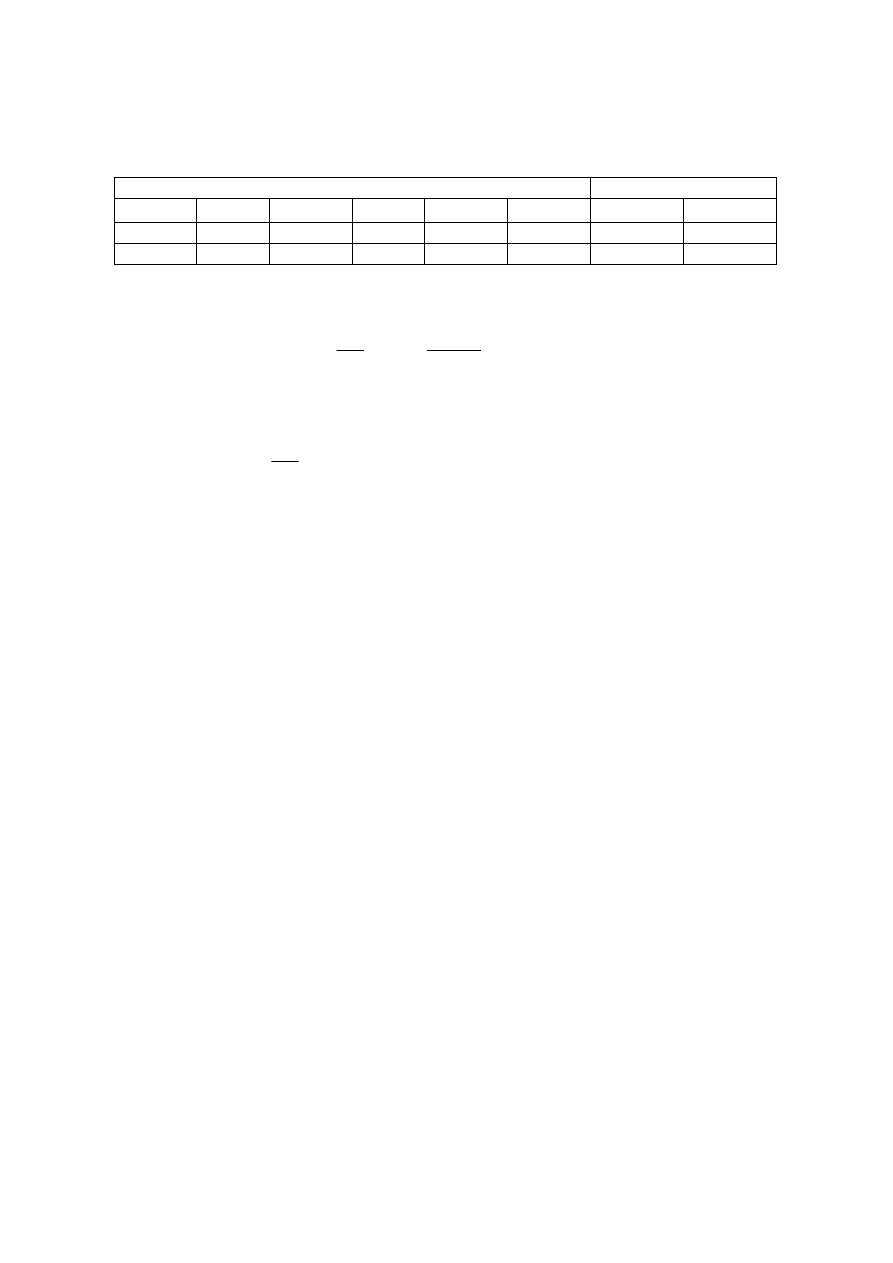
Okno dostrojenia parametrów symulacji pokazano na rys. 4.6.
21
Rys. 4.6. Okno dostrojenia parametrów symulacji
Wyznaczenie charakterystyki biegu jałowego generatora zgodnie z p. 3.1 wykonuje się na
modelu rys. 4.1 przy zmianach parametru bloku I
f
od 0 do 1.4.
Dla każdej wartości prądu wzbudzenia wykonuje się symulację. Wyznaczenie charakterystyk
odbywa się przy zerowych wartościach mocy reaktywnej obciążenia i małej (1 W) mocy
czynnej. Po wykonaniu badań wypełnia się tabelę 4.1.
Таbela 4.1
Prąd wzbudzenia I
f
Еf (V)
U (V)
Z wyników tabeli otrzymuje się zależność U=f(If), z której sposobem graficznym określa się
I
f.ob
, odpowiadająca napięciu nominalnemu maszyny.
Budowa zewnętrznej charakterystyki generatora przy obciążeniu czynnym wykonuje się za
pomocą modeli (rys. 4.1) przy zmianach mocy czynnej zakresie od 0.2 Р
G
до 1.4 Р
G
z interwałem
0.4 Р
G
. Wartość Р
G
jest wybierana w pierwszym polu bloku dostrojenia parametrów generatora
(rys. 4.2). Po otrzymaniu danych pomiarowych wypełnia się tabelę 4.2.
22
Таbela 4.2
Pomiary
Obliczenia
Р
нагр
Q
нагр
E
f
ω
Р
е
U
соs
ϕ
I
W
VАr
V
rad/s
W
V
А
Obliczenia wykonuje sie według wzorów.
ob
ob
P
Q
arctg
=
ϕ
ϕ
cos
U
P
I
ob
=
(4.1)
Z pomiarów i obliczeń uzyskuje się charakterystykę zewnętrzną generatora U=f(I).
Budowa zewnętrznych charakterystyk przy czynno-indukcyjnym i czynno-pojemnościowym
obciążeniu zgodnie z p. 3.3, 3.4 wykonuje się podobnie. Przy zmianie mocy obciążenia trzeba
uwzględniać warunek
1
=
ob
ob
Р
Q
. Zgodnie z pomiarami wypełnia się tabelę, podobnie tabelę 4.2 i
następnie buduje się zewnętrzną charakterystykę.
6. Zawartość sprawozdania.
6.1. Schemat modeli i opis bloków wirtualnych.
6.2. Charakterystyka biegu jałowego.
6.3. Zewnętrzne charakterystyki generatora przy różnych współczynnikach mocy obciążenia.
23
LABORATORIUM „
Modelowanie w SIMULINKU
”
Ćwiczenie № 5
Badania maszyny asynchronicznej z wirnikiem zwartym.
1. Cel pracy – Badania Badania maszyny asynchronicznej z wirnikiem zwartym.
2. Wskazówki do pracy. Do wykonania pracy należy przystąpić po zapoznaniu się z literaturą:
•
Afonin A. Konspekt wykładu „Projektowanie układów elektromechanicznych w
MATLABIE
i
SIMULINKU. Wersja elektroniczna. ZUE i EM, In-t Elektrotechniki Politechniki
Szczecińskiej, 2003, 164 s.
•
Afonin A., Kramarz W., Cierzniewski P.: Elektromechaniczne przetworniki energii z
komutacją elektroniczna. Skrypt, seria „Tempus”, Szczecin - 2000, 242 s.
•
German-Gałkin S, Gnat K.:
Ćwiczenia z Elektrotechniki w MATLABIE I SIMULINKU.
Wyższa Szkoła Morska, Szczecin - 2002.
•
Kosmol J.: Serwonapędy obrabiarek sterowanych numerycznie. WNT, W-wa, 1998, 308 s.
•
3. Zawartość pracy.
3.1. Wyznaczenie parametrów schematu zastępczego za pomocą metody biegu jalowego i
metody zwarcia.
3.2. Wyznaczenie mechanicznych i roboczych charakterystyk w reżimie silnika.
3.3. Wyznaczenie mechanicznych i roboczych charakterystyk w reżimie generatora.
4. Opis laboratoryjnego stanowiska wirtualnego .
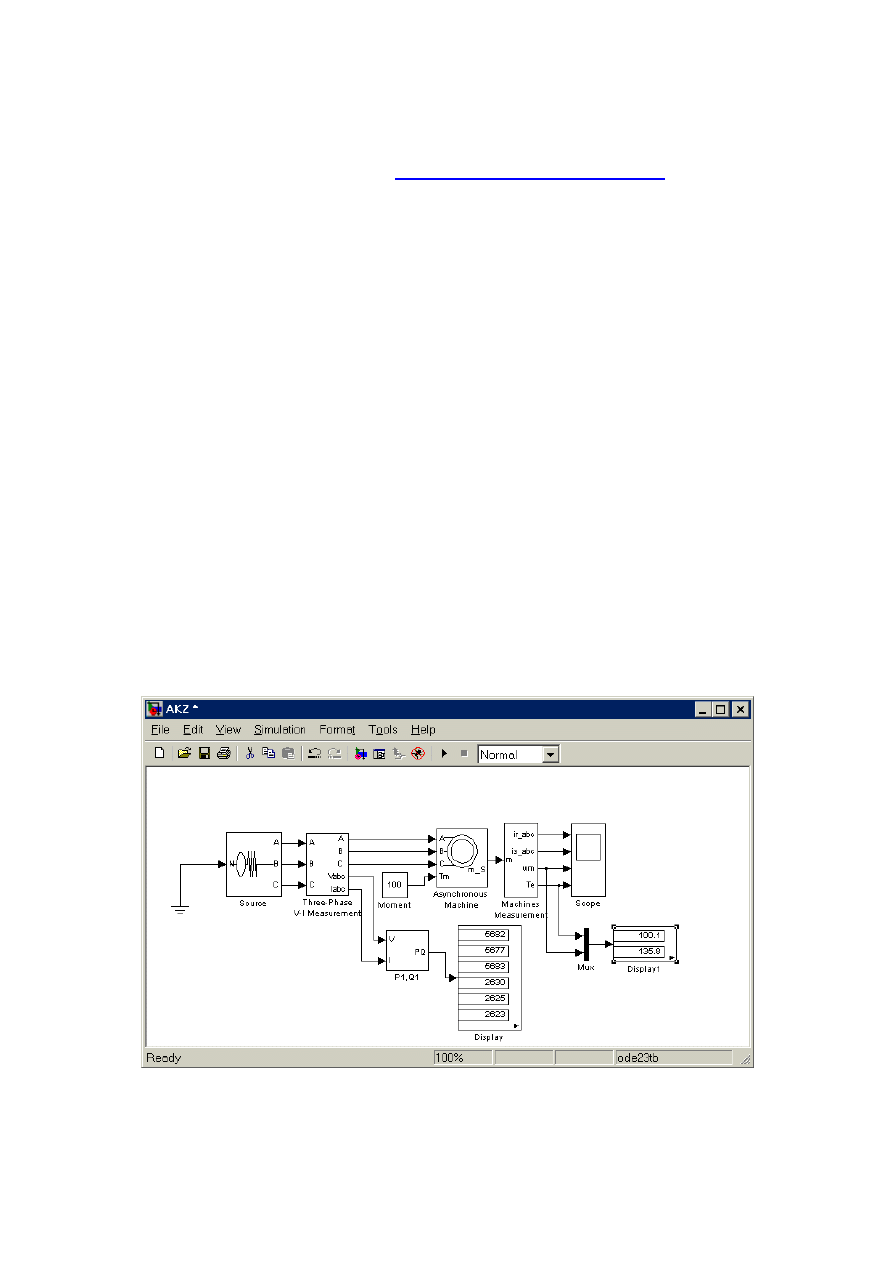
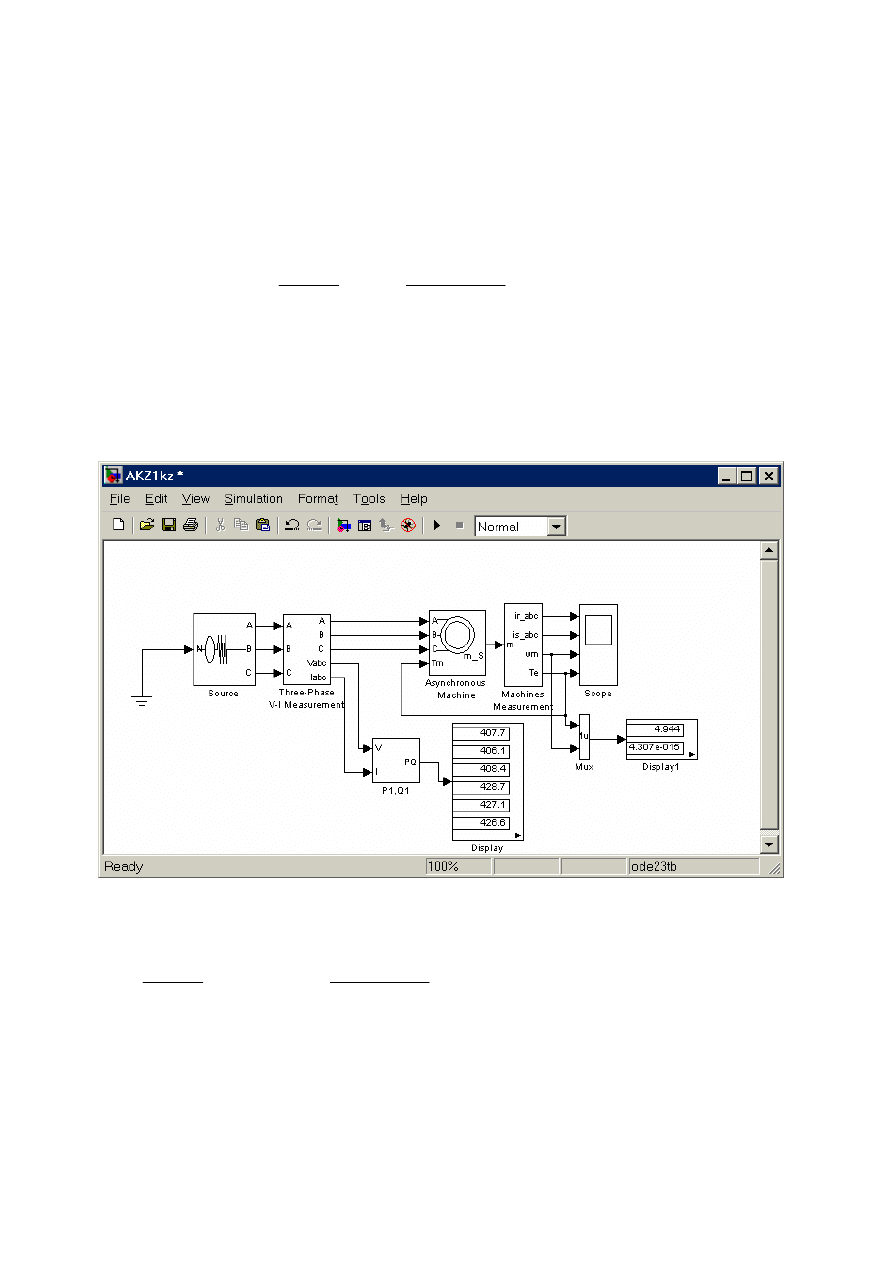
Laboratoryjne stanowisko wirtualne pokazano na rys. 5.1.
Rys. 5.1. Model do badań maszyny asynchronicznej
24
Model zawiera:
-
śródło przemiennego trójfazowego napięcia Source z biblioteki Power System Blockset
/Extras/Electrical Sources;
-
Przyrząd pomiarowy trójfazowego napięcia i prądu Three-Phase V-I Measurement z
biblioteki Power System Blockset/Extras /Measurement;
-
trófazową maszyną asynchroniczną Asynhronous Machine z biblioteki Power System
Blockset / Machines;
-
Przyrząd pomiarowy mocy czynnej i biernej P1,Q1 z biblioteki Power System
Blockset/Extras/Measurement;
-
blok Display do ilościowego przedstawienia zmierzonych mocy i blok Scope do
obserwacji prądów stojana i wirnika, a także prędkości i momentu elektromagnetycznego
z głównej biblioteki Simulink/Sinks;
-
blok Moment do zadania momentu mechanicznego na wałe maszyny z głównej biblioteki
Simulink/Source;
-
blok
Display1
do
ilościowego
przedstawienia
zmierzonych
momentu
elektromagnetycznego (Nm) i prędkości (rad/s) maszyny z głównej biblioteki
Simulink/Sinks;
-
blok Mux, łączący dwa sygnala w jeden wektorowy z głównej biblioteki Simulink/Sygnal
& System.
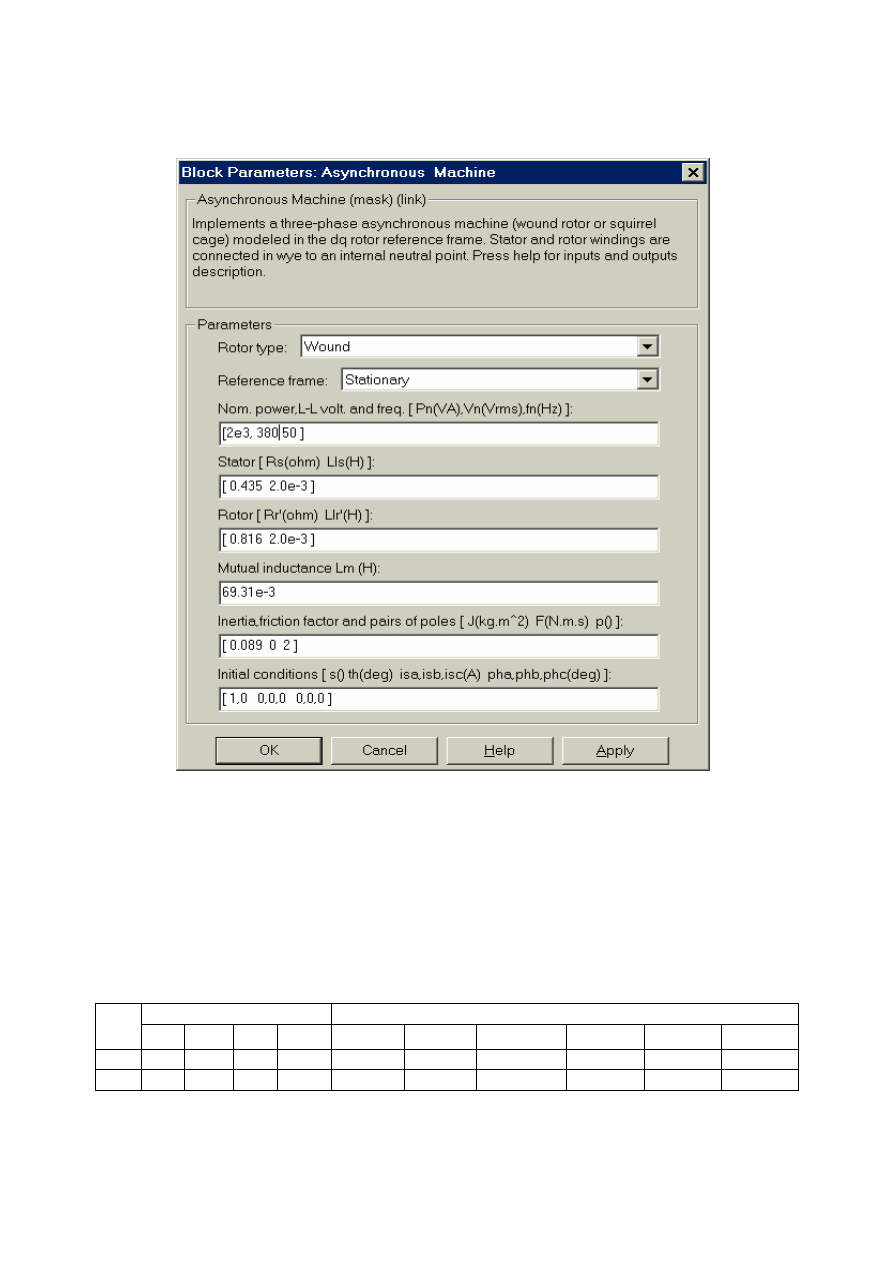
Okno dostrojenia parametrów trófazowej maszyny asynchronicznej pokazano na rys. 5.2.
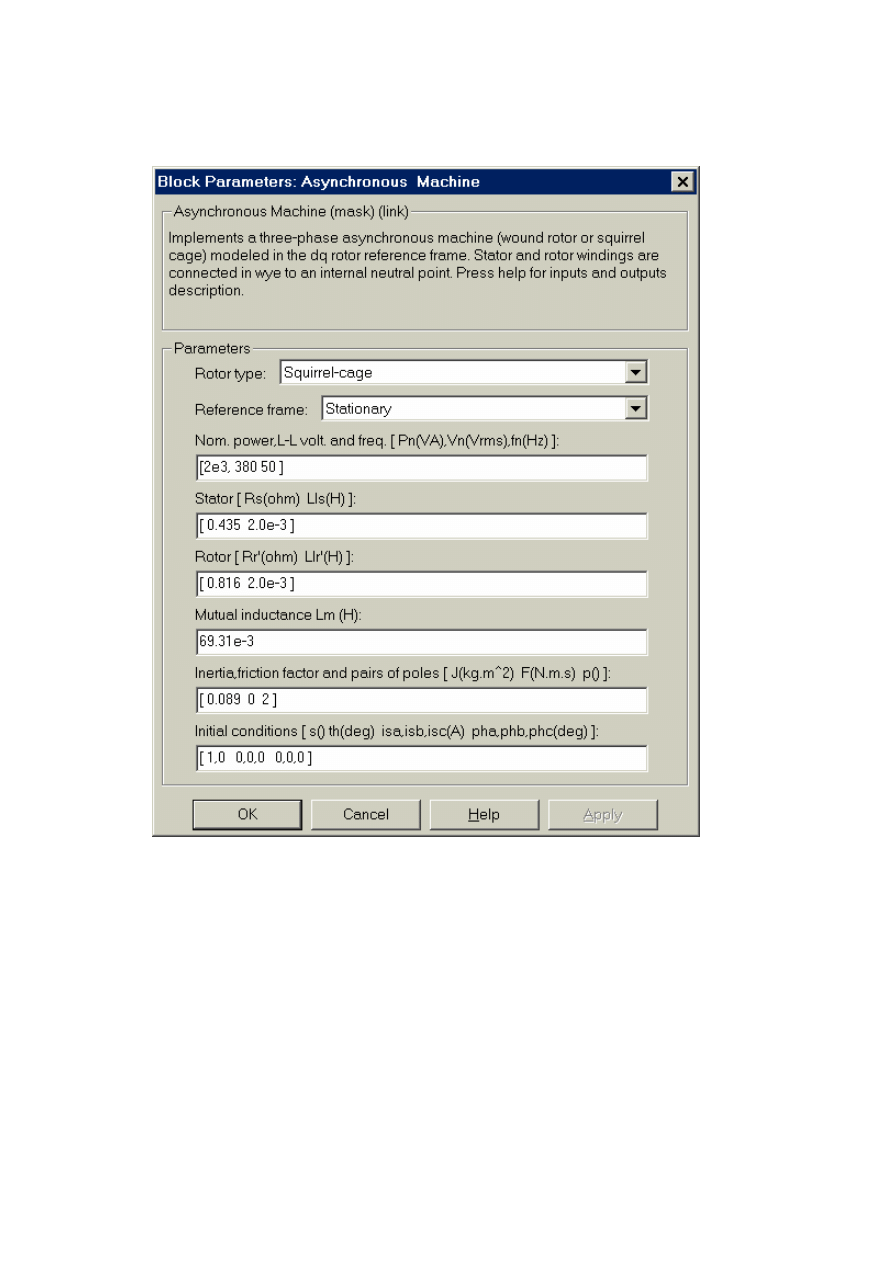
W polach okna zadawano po kolei:
-
typ wirnika (Rotor Type), w menu pola można zadać wirnik zwarty lub fazowy;
-
układ odczytu pomiarowego przy analizie (Reference frame);
-
moc, wartość znamieniowa skuteczna napięcia liniowego i częstotliwości;
-
parametry schematu zastępczego stojana;
-
parametry schematu zastępczego wirnika;
-
parametry obwodu magnesowania;
-
moment bezwładności, współczynnik tarcia lepkiego, liczba par biegunów;
-
warunki początkowe dla symulacji (poślizg, położenie wirnika, prądy stojana i ich
początkową fazę).
Wyznaczenie parametry schematu zastępczego trófazowej maszyny asynchronicznej
1. Poślizg nominalny
s
H
s
n
n
n
n
s
−
=
, (1)
gdzie:
S
n -prędkość synchroniczna (prędkość wirującego pola elektromagnetycznego),
H
n - prędkość nominalna obracania wirnika.
2. Poślizg krytyczny
(
)
n
k
k
k
s
m
m
s
1
2
−
+
=
, (2)
gdzie:
H
K
K
M
M
m
=
- stosunek momentu zwarcia (rozruchowego) do momentu nominalnego.
25
3. Współczynnik konstrukcyjny
m
ls
L
L
c
+
=
1
1
. (3)
4. Współczynnik lepkiego tarcia
2
)
60
/
2
(
Н
m
m
n
P
B
π
∆
=
. (4)
W równaniu (4) straty mechaniczne
m
P
∆
określane są w sposób następujący. Zadają zmianą
m
P
∆
w granicach od 0.01 do 0.1 mocy znamienowej i budują zależność I
1
od
m
P
∆
według wzoru
ϕη
cos
3
1
H
m
H
U
P
P
I
∆
+
=
(5)
Wartość
m
P
∆
wyznaczają w sposób graficzny przy I
1
=I
N
.
5. Rezystancia stojana
)
(
)
/
1
(
)
1
(
)
3
/
(
2
3
1
1
2
m
H
k
k
H
H
s
P
P
m
s
c
c
s
U
R
∆
+
+
−
=
. (6)
6. Rezystancja wirnika
2
2
)
1
(
)
(
3
1
H
K
H
m
H
r
I
i
s
P
P
R
−
∆
+
=
, (7)
gdzie:
H
K
K
I
I
i
=
-stosunek prądu zwarcia do prądu znamieniowego.
7. Indukcyjność stojana i wirnika
[
]
k
H
H
H
H
r
S
s
s
I
U
f
L
L
/
cos
)
(cos
1
3
/
.
2
1
2
ϕ
ϕ
π
−
−
=
≅
. (8)
8. Indukcyjność rozproszenia stojana i wirnika
[
]
2
2
)
(
)
/(
)
3
/
(
.
4
1
r
s
H
K
H
H
lr
ls
R
R
I
i
U
f
L
L
+
−
=
≅
π
. (9)
9. Wzajemna indukcyjność
ls
s
m
L
L
L
−
=
(10)
Okno dostrojenia parametrów maszyny asynchronicznej pokazano na rys. 5.2.
26
Rys. 5.2. Okno dostrojenia parametrów maszyny asynchronicznej
27
Okno dostrojenia parametrów uniwersalnego bloku pomiarów zmiennych stanów maszyny
pokazano na rys. 5.3. W menu bloku Machine type jest zadawany typ maszyny.
Рис. 5.3. Okno dostrojenia parametrów bloku pomiarowego
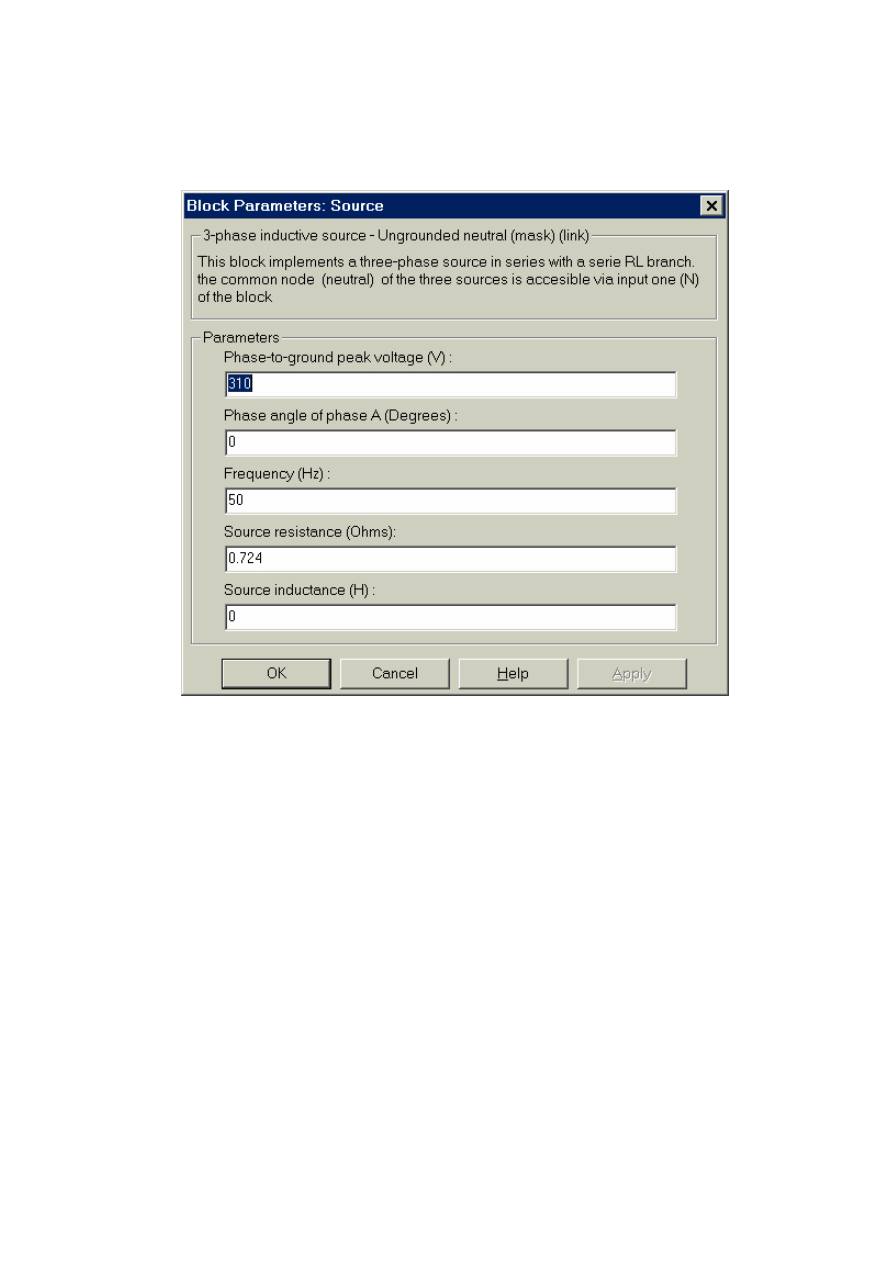
Okno dostrojenia parametrów trójfazowego źródła zasilania pokazano na rys. 5.4.
W polach okna zadawano:
-
amplituda fazowego napięcia źródła zasilania (V);
-
faza pczątkowa w gradusach;
-
częstotłiwość (Hz);
-
rezystancja wewnętrzna (Om) i indukcyjność żródła zasilania (H).
Napięcie i częstotłiwość żródła zasilania powinni odpowiadać parametrom maszyny
asynchronicznej.
28
Rys. 5.4. Okno dostrojenia parametrów trójfazowego żródła zasilania
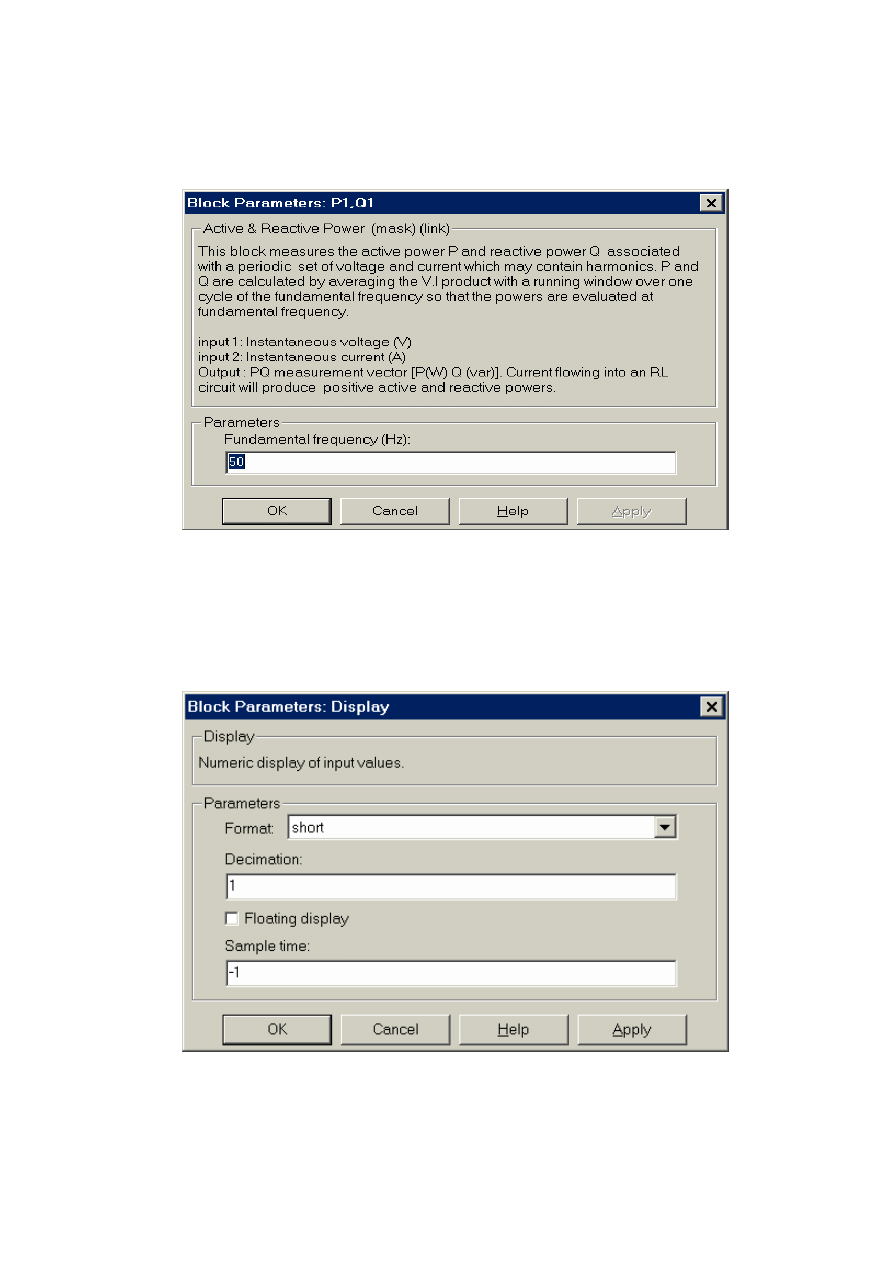
Okno dostrojenia bloku pomiru mocy czynnej i biernej pokazano na rys. 5.5. Przy tym wybierany
tylko jeden parametr – częstotłiwość, która powinna być równa częstotliwości źródła zasilania.
29
Рис. 5.5. Okno dostrojenia bloku pomiru mocy
Okno dostrojenia parametrów monitora pokazano na rys. 5.6. W polach okna dostrojenia
pokazany format rezultatów numerycznych, w polu Decimation – zadawaną liczba skoków
obliczeniowych, wartości których wyświetlone są na displeju. Ustawienie w polu Sample time
wartości –1 synchronizuje pracę bloku z dyskretą obliczeń.
Rys. 5.6. Okno dostrojenia parametrów monitora
30
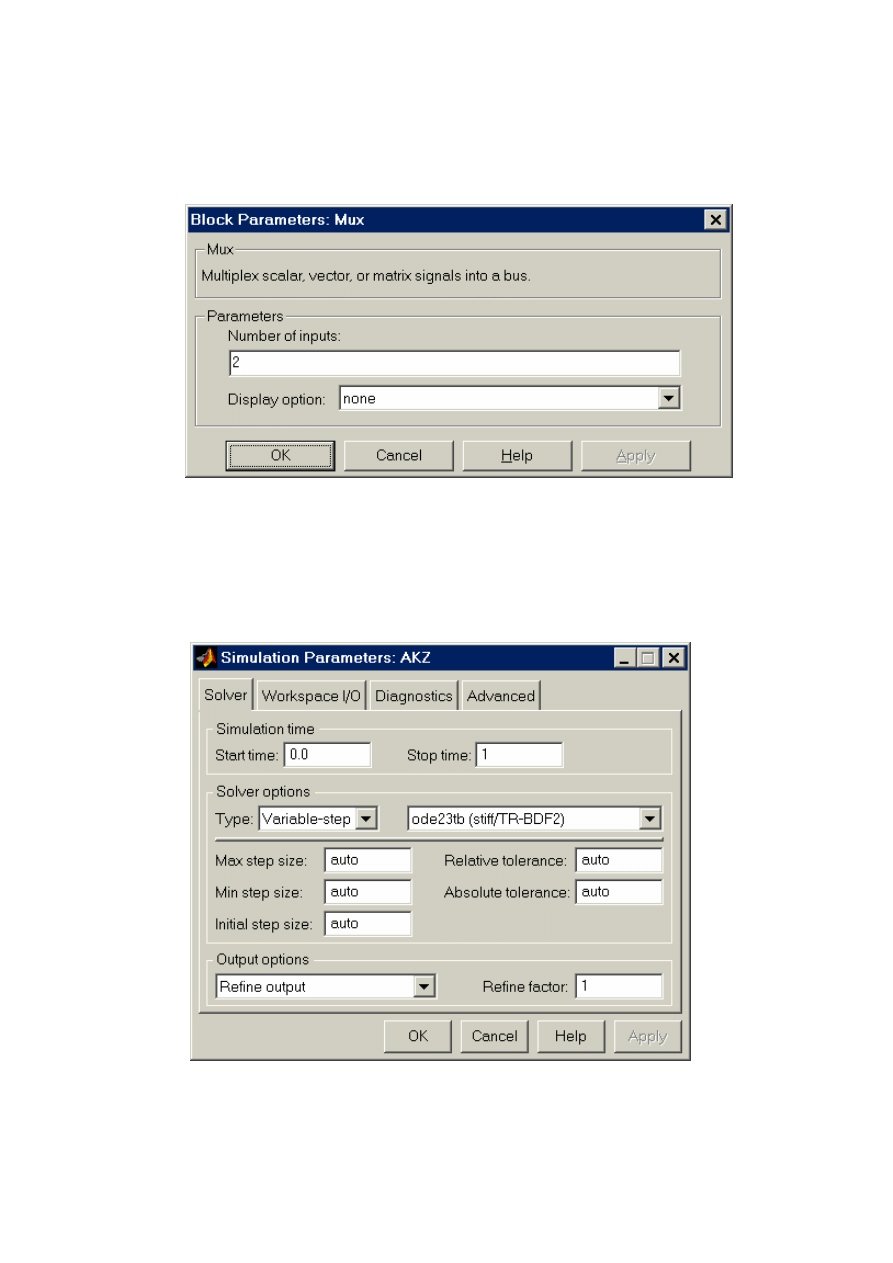
Okno dostrojenia parametrów bloku Mux pokazano na rys. 5.7. Blok Mux łączy dwa sygnala w
jeden wektorowy.
Рис. 5.7. Okno dostrojenia parametrów bloku Mux
5. Kolejność wykonania ćwiczenia.
Parametry maszyny asynchronicznej wyznacza nauczyciel.
Okno dostrojenia parametrów symulacji pokazano na rys. 5.8.
Rys. 5.8. Okno dostrojenia parametrów symulacji
31
Określenie parametrów schematu zastępczego zgodnie z punktem 3.1 i porównanie ich z
zadanymi w oknie ustawienia (rys.3.5.2.) osiąga się metodą biegu jałowego i metodą zwarcia.
Przy biegu jałowym moment obciążenia przyjmuje się równym zeru. Wielkość oporności
czynnej stojana i indukcyjność obwodu magnesowania określa się zależnościami:
2
2
2
Q
P
PU
R
s
+
=
,
)
(
2
2
2
2
Q
P
f
QU
L
m
+
=
π
,
gdzie Р, Q- wielkość moc czynnej i biernej w jednej fazie, U, f- napięcie skuteczne i
częstotliwość źródła.
Badanie stanu zwarcia przeprowadza się przy napięciu źródła zasilania 15-25% napięcia
początkowego. Model przy badaniu stanu zwarcia pokazany jest na rysunku 3.5.9, tam pokazane
są również rezultaty symulacji.
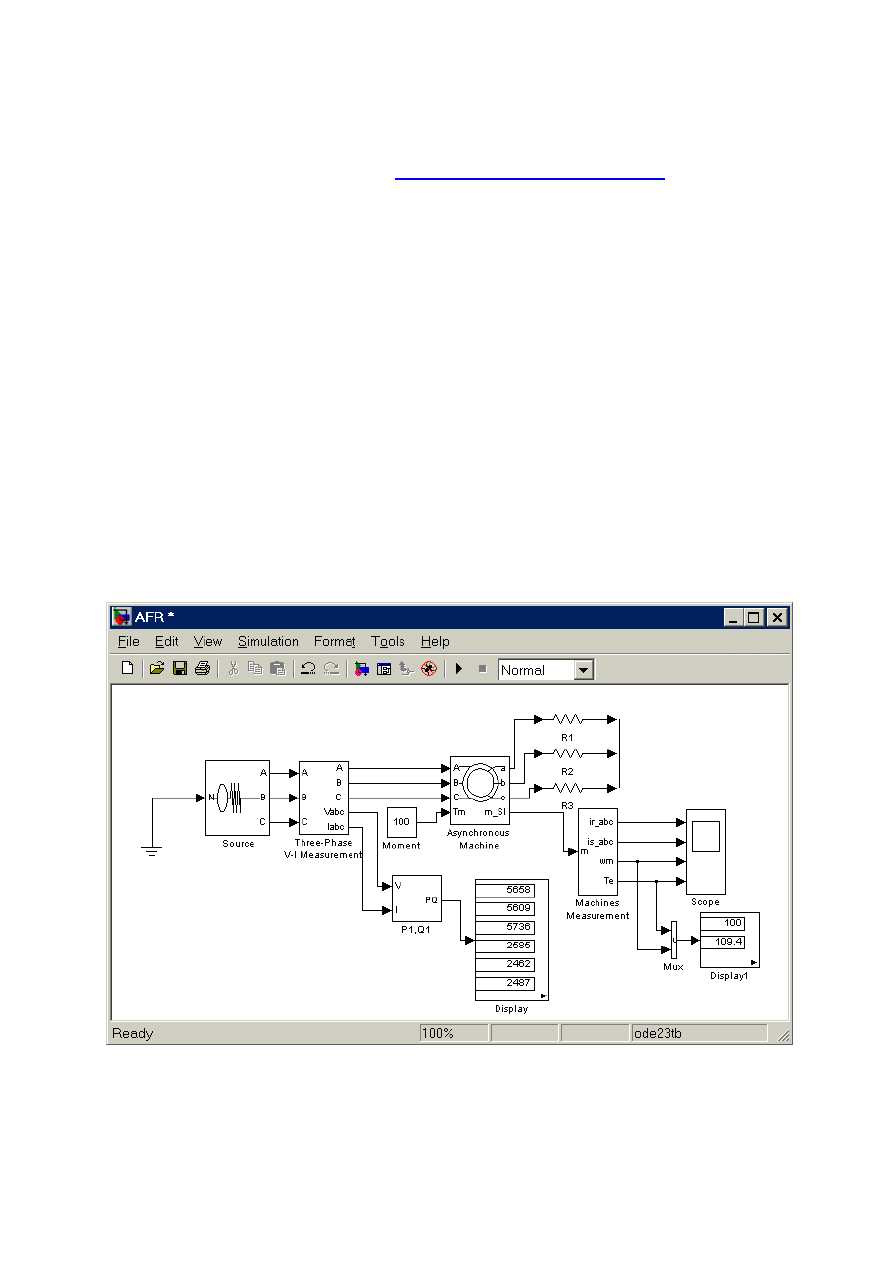
Model dla przeprowadzenia metody zwarcia razem z wynikami symulacji pokazano na rys. 5.9.
Rys. 5.9. Model dla przeprowadzenia metody zwarcia
Parametry schematu zastęczego – rezystancja wirnika i indukcyjności rozproszenia stojana i
wirnika określa się na podstawie wzorów:
s
r
R
Q
P
PU
R
−
+
=
2
2
2
,
)
(
2
2
2
2
Q
P
f
QU
L
L
r
s
+
=
=
π
gdzie: Р, Q- czynna i bierna moc w jednej fazie, U, f – wartość skuteczna napięcia i
częstotłiwość żródła zasilania.
Po wykonaniu badań i obliczeń parametrów wykonuje się porównanie ich z wprowadzonymi w
32
okna (rys. 5.2).
Budowa mechanicznych i roboczych charakterystyk maszyny w reżimie silnikowym zgodnie z p.
3.2 odbywa się za pomocą modelu (rys. 5.1) przy zmianach momentu obciążenia od 0 do 1.4
nominalnego z symulacją dla każdej wartości momentu obciążenia. Po wykonaniu badań
wypełnia się tabelę 5.1.
Таbela 5.1
Pomiary Obliczenia
M
N
Р
Q
U
ω
ϕ
cos
ϕ
P
2
η
s
I
Nm
W
VАr
V
rad/s
grad
W
%
%
А
Na podstawie wyników z tabeli buduje się mechaniczną charakterystykę maszyny przy prac
silnikowej oraz charakterystyki robocze.
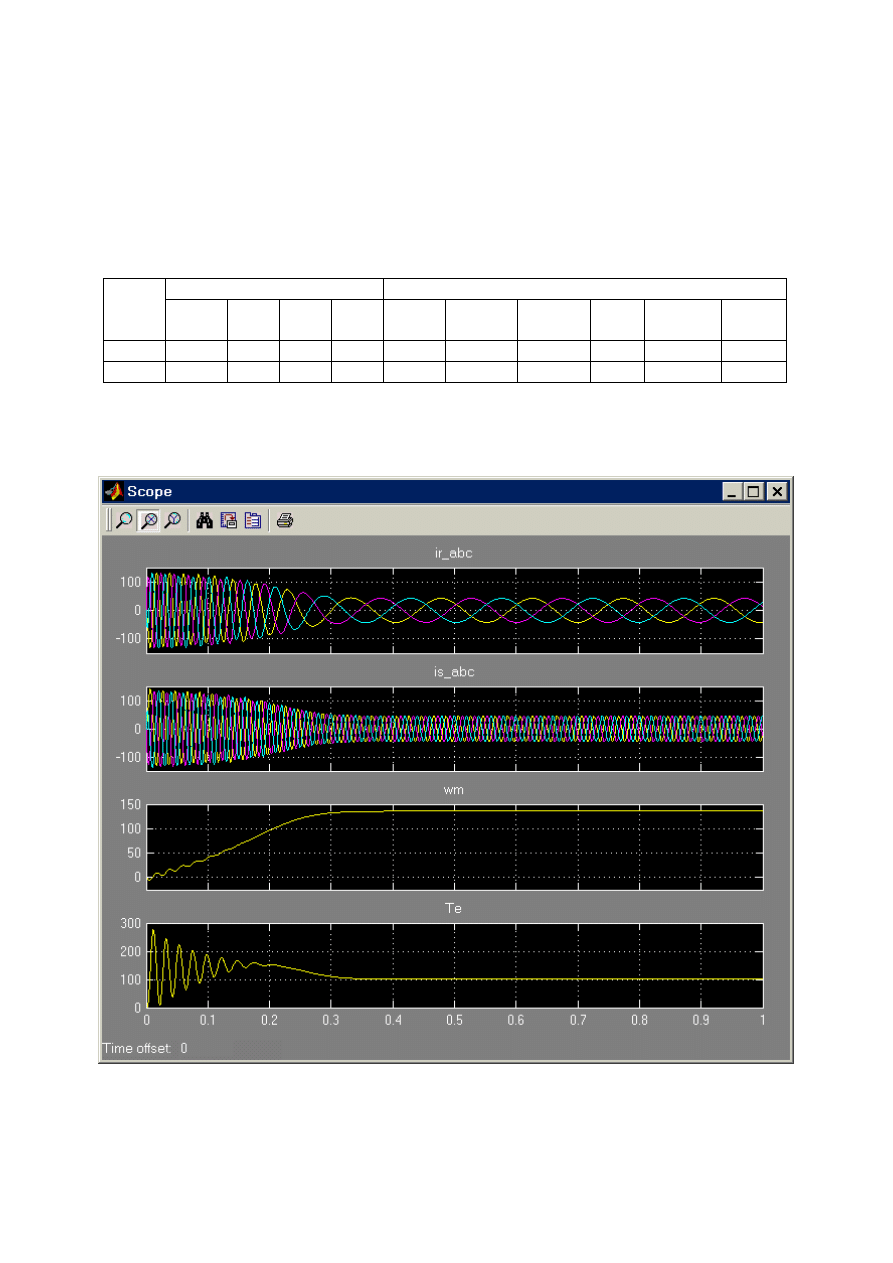
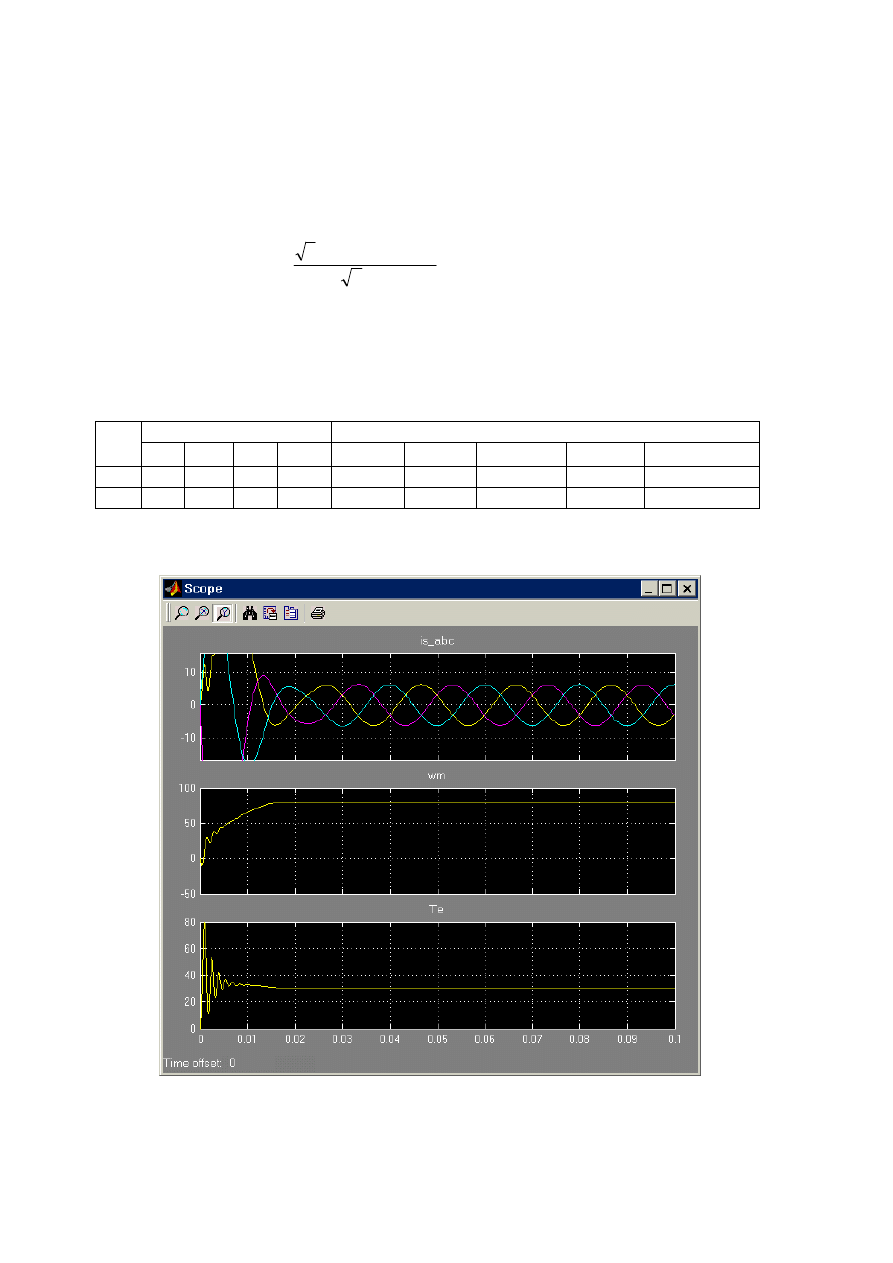
Wyniki symulacji przy М
N
=100 Nm pokazano na rys. 5.10.
Rys. 5.10. Charakterystyka w funkcji czasu zmiennych stanu maszyny przy prace silnikowej

33
Charakterystykę zmiany w czasie zmiennych stanu maszyny przy pracy silnikowej można
obserwować za pomocą oscyloskopu (rys. 5.10). Można zauważyć procesy w stanach ustalonych
i przejściowych.
Zgodnie z p.3.3 konspektu otrzymuje się charakterystyki maszyny asynchronicznej w reżimie
generatora przy zmianach momentu od 0 do –1.5 М
N
. Przy tym wypełnia się tabelę.
6. Zawartość sprawozdania.
6.1. Schemat modeli i bloków wirtualnych.
6.2. Porównawcza tabela zadanych i otrzymanych wartości metodami biegu jalowego i zwarcia.
6.3. Mechaniczna charakterystyka maszyny przy prace silnikowej i generatorowej.
6.4. Robocza charakterystyka maszyny przy prace silnikowej.
34
LABORATORIUM „
Modelowanie w SIMULINKU
”
Ćwiczenie № 6.
Badania trójfazowej maszyny synchronicznej z wirnikiem fazowym.
1. Cel pracy – Badania trójfazowej maszyny synchronicznej z wirnikiem fazowym.
2. Wskazówki do pracy. Do wykonania pracy należy przystąpić po zapoznaniu się z literaturą:
•
Afonin A. Konspekt wykładu „Projektowanie układów elektromechanicznych w MATLABIE
i SIMULINKU. Wersja elektroniczna. ZUE i EM, In-t Elektrotechniki Politechniki
Szczecińskiej, 2003, 164 s.
•
Afonin A., Kramarz W., Cierzniewski P.: Elektromechaniczne przetworniki energii z
komutacją elektroniczna. Skrypt, seria „Tempus”, Szczecin - 2000, 242 s.
•
German-Gałkin S, Gnat K.: Ćwiczenia z Elektrotechniki w MATLABIE I SIMULINKU.
Wyższa Szkoła Morska, Szczecin - 2002.
•
Kosmol J.: Serwonapędy obrabiarek sterowanych numerycznie. WNT, W-wa, 1998, 308 s.
3. Treść pracy.
3.1. Badania mechanicznych charakterystyk przy prace w stanie silnika.
4. Wirtualny układ laboratoryjny .
Wirtualny laboratoryjny układ pokazano na rys. 6.1.
Rys. 6.1. Model do badań trójfazowej maszyny synchronicznej z wirnikiem fazowym
35
Rys. 6.2. Okno dostrojenia parametrów maszyny
5. Kolejność wykonania ćwiczenia:
Parametry maszyny proponuje nauczyciel. Wyznaczenie mechanicznych charakterystyk odbywa
sie przy zmianach momentu obciążenia od 0 do 1.4 momentu znamieniowego i przy zmianach
rezystancji od 0 do 5R
S
.
Wybrana wartość rezystancji w wirniku;
-
Dla każdej wartości momentu obciążenia wykonuje się symulacja. Po zakonczeniu badań
wypełnia się tabelę 6.1.
Таbela 6.1
Pomiary
Obliczenia
M
n
Р
1
Q
1
U
1
ω
ϕ
cos
ϕ
P
2
η
s
I
1
Nm W
VAr V
rad/s grad
W
%
%
А
36
Na podstawie rezultatów symulacji z tabeli buduje się mechaniczne i robocze charakterystyki
maszyny elektrycznej.
Wyniki symulacji przy М
n
=100 Nm pokazano na rys.6.3.
Rys. 6.3. Zmienne stanu maszyny przy prace silnikowej w funkcji czasu
Zmienne stanu maszyny przy prace silnikowej w funkcji czasu można obserwować za pomocą
oscyloskopu (rys. 6.3), gdzie jest widoczy proces przejściowy podczas rozruchu a także stan
ustalony.
37
LABORATORIUM „
Modelowanie w SIMULINKU
”
Ćwiczenie № 7
Badania trójfazowej jawnobiegunowej magnetoelektrycznej maszyny synchronicznej.
1. Cel pracy – Badania trójfazowej jawnobiegunowej magnetoelektrycznej maszyny
synchronicznej.
2. Wskazówki do pracy. Do wykonania pracy nałeży przystąpić po zapoznaniu się z literaturą:
•
Afonin A. Konspekt lekcje „Projektowanie układów elektromechanicznych w MATLABIE i
SIMULINKU
. Wersja elektroniczna. ZUE i EM, In-t Elektrotechniki Politechniki
Szczecińskiej, 2003, 164 s.
•
Afonin A., Kramarz W., Cierzniewski P.: Elektromechaniczne przetworniki energii z
komutacją elektroniczna. Skrypt, seria „Tempus”, Szczecin - 2000, 242 s.
•
German-Gałkin S, Gnat K.: Ćwiczenia z Elektrotechniki w MATLABIE I SIMULINKU.
Wyższa Szkoła Morska, Szczecin - 2002.
Kosmol J.: Serwonapędy obrabiarek sterowanych numeryczne. WNT, W-wa, 1998, 308
3. Zawartość pracy.
3.1. Wyznaczenie mechanicznych i obliczenia roboczych charakterystyk pracy maszyny
elektrycznej w reżymie silnikowym.
3.2. Wyznaczenie załeżności pobieranej z sieci mocy reaktywnej od strumienia wzbudzenia
maszyny.
4. Wirtualny układ laboratoryjny.
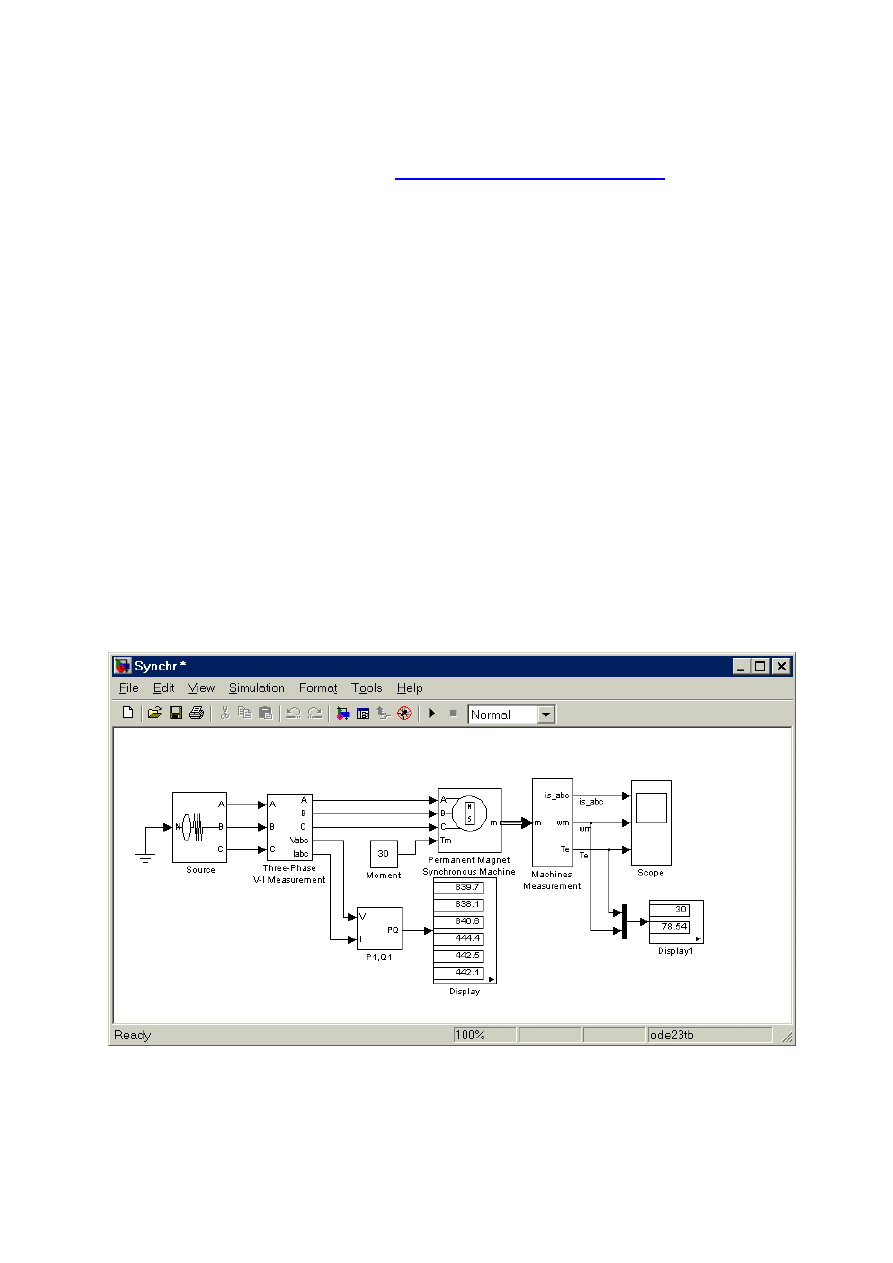
Wirtualny laboratoryjny układ pokazano na rys. 7.1.
Rys. 1.1. Model do badań maszyny synchronicznej
Układ zawiera:

38
-
Źródło napięcia przemiennego trójfazowego z biblioteki Power System Blockset
/Extras/Electrical Sources;
-
przyrząd pomiarowy trójfazowego napięcia i prądu Three-Phase V-I Measurement z
biblioteki System Blockset/Extras /Measurement;
-
badaną maszynę synchroniczną Magnet Synchronous Machine z biblioteki Power System
Blockset / Machines;
-
miernik
mocy
czynnej
i
biernej
P1,Q1
z
biblioteki
Power
System
Blockset/Extras/Measurement;
-
blok Display dla ilościowego przedstawienia mierzonych mocy i blok Scope do
obserwacji prądu stojana, a także prędkości i momentu maszyny synchronicznej z
głównej biblioteki Simulink/Sinks;
-
blok Moment do zadania momentu mechanicznego na wale maszyny synchronicznej z
głównej biblioteki Simulink/Source;
-
blok
Display1
dla
ilościowego
przedstawienia
mierzonych
momentu
elektromagnetycznego (Nm) i prędkości (rad/s) maszyny synchronicznej z głównej
biblioteki Simulink/Sinks;
-
blok Mux, łączący dwa sygnala w jeden wektorowy z głównej biblioteki Simulink/Sygnal
& System.
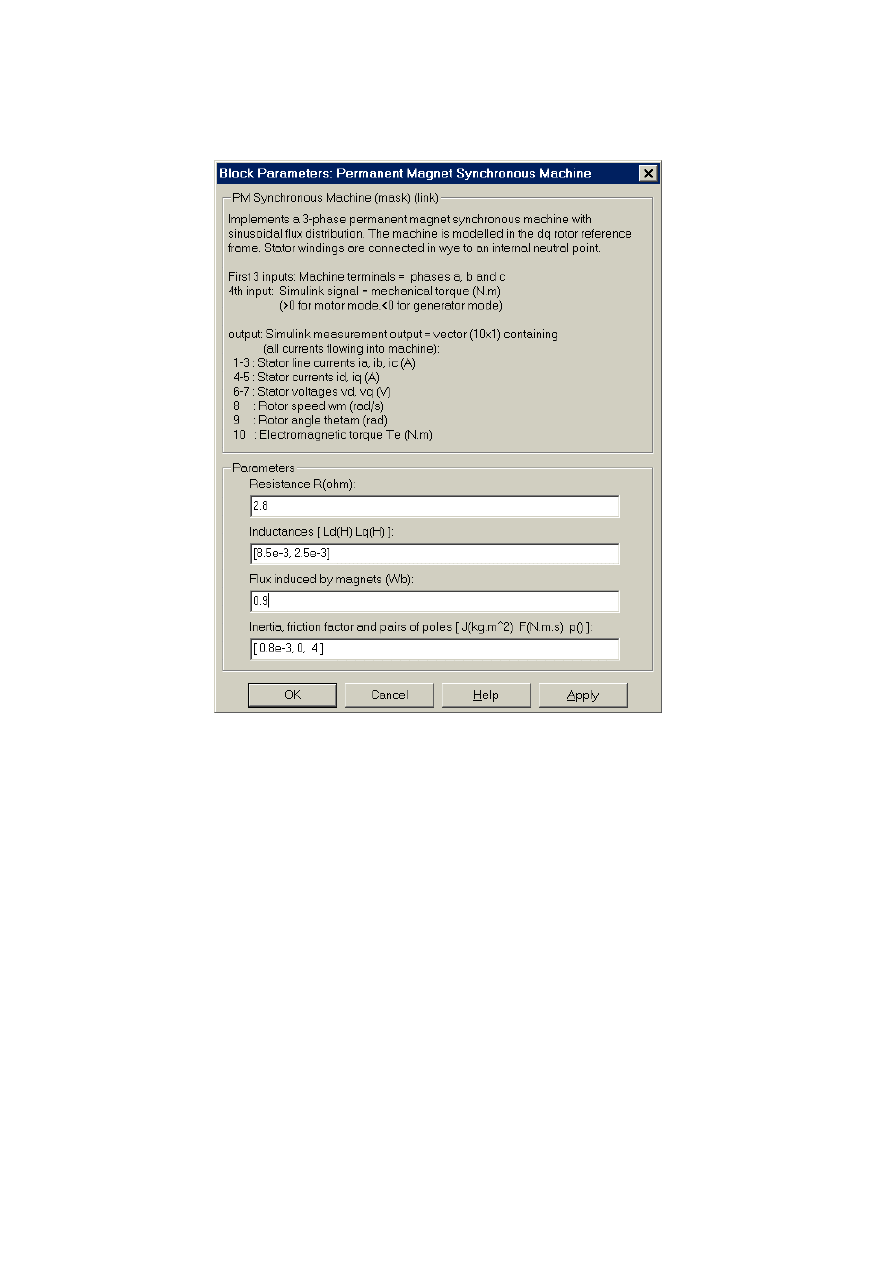
Okno dostrojenia parametrów maszyny synchronicznej pokazano na rys. 7.2.
W polach okna zadano w kołejnosci:
-
rezystancję uzwojeń stojana (Om);
-
indukcyjność osi podłużnej i poprzecznej;
-
strumień maksymalny maszyny synchronicznej (Wb);
-
moment bezwładności (kgm
2
), współczynnik tarcia lepkiego (Nms), liczbę par biegunów.
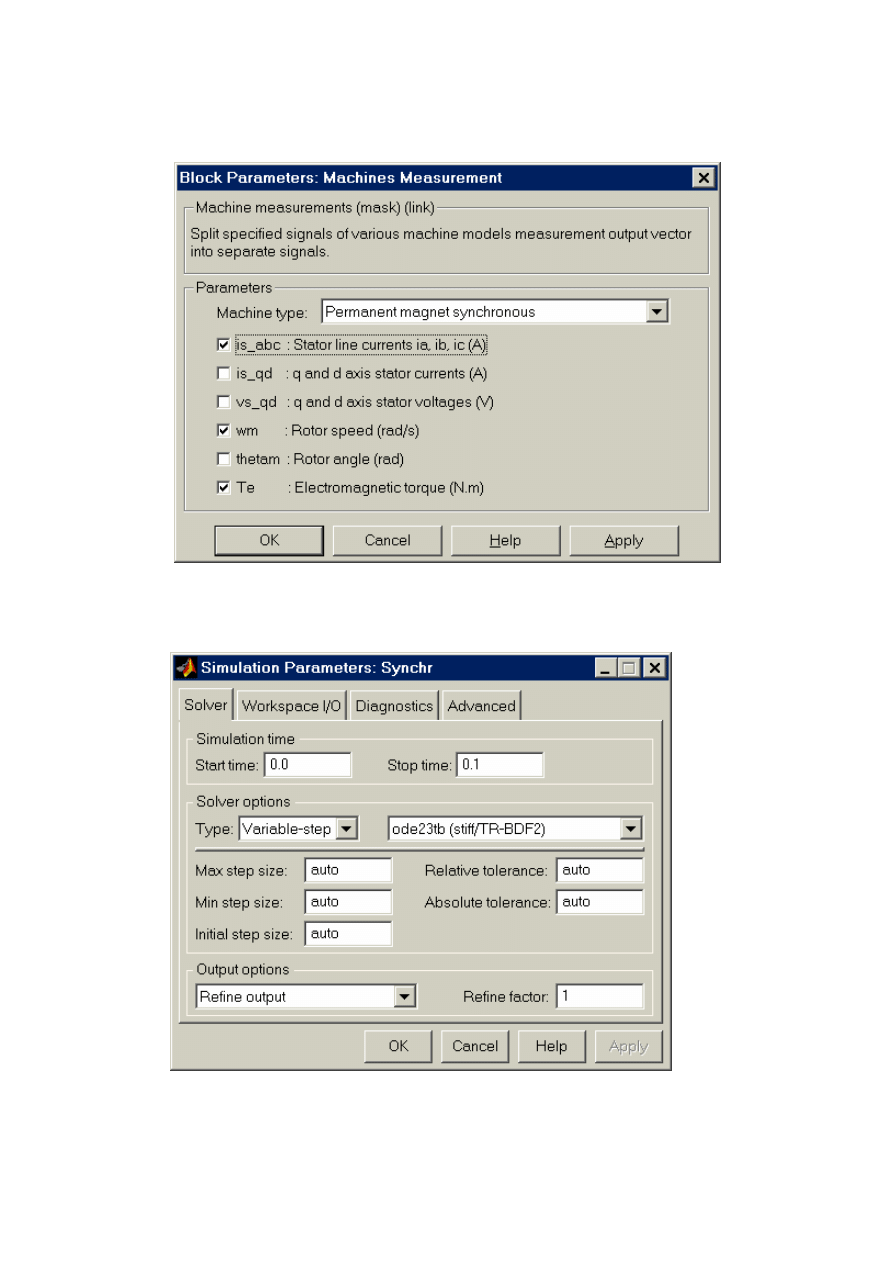
Okno dostrojenia bloku pomiarowego zmiennych stanu maszyny pokazano na rys. 7.3.
Typ maszyny jest wybierany w polu Machine type. Należy wybrać w menu Permanent magnet
synchronous i odznaczyć zmienne stanu, które podlegają pomiarom.
39
Rys. 7.2. Okno dostrojenia parametrów maszyny synchronicznej
Содержание и настройка остальных блоков модели подробно изложена в лабораторной
работе №5.
5. Kolejność wykonywania czynności
Parametry maszyny synchronicznej oraz źródła zasilania ustala nauczyciel. Przy pracy
samodzielnej dane maszyny można przyjąć takie jak na rys.3.7.2, a źródła zasilania- jak na
rys.3.5.4. Okno dostrojenia parametrów modelowania pokazano na rys.3.7.4.
40
Рис. 7.3. Okno dostrojenia bloku pomiarowego zmiennych stanu maszyny synchronicznej
Okno dostrojenia parametrów symulacji pokazano na rys. 7.4.
Rys. 7.4. Okno dostrojenia parametrów symulacji
41
Wyznaczenie mechanicznych i roboczych charakterystyk maszyny w stanie pracy silnikowej
odpowiednio do p. 3.1 zawartości ćwiczenia wykonuje się na modelu (rys. 7.1) przy zmianach
momentu obciążenia od 0 do 1.4 znamienowego. Moment znamieniowy określa się przez wzór:
s
m
m
m
H
R
p
Ф
U
U
M
ω
ω
2
)
(
3
−
≈
, (3.7.1)
gdzie U
m
,
f
π
ω
2
=
-amplituda i częstotliwość źródła zasilania, Ф
m
,
p
R
S
,
- strumień maksymalny,
rezystancja stojana i liczba par biegunów maszyny (rys. 7.2).
Dla każdej wartości momentu obciązenia wykonywana jest symulacja. Po wykonaniu badań
wypełnia się tabelę 7.1.
Таbela 7.1
Pomiary
Obliczenia
M
N
Р
Q
U
ω
ϕ
cos
ϕ
P
2
η
I
Nm W
VAr В
rad/s grad
W
%
А
Zgodnie z danymi tabeli buduje się zarówno mechaniczną jak i roboczą charakterystykę
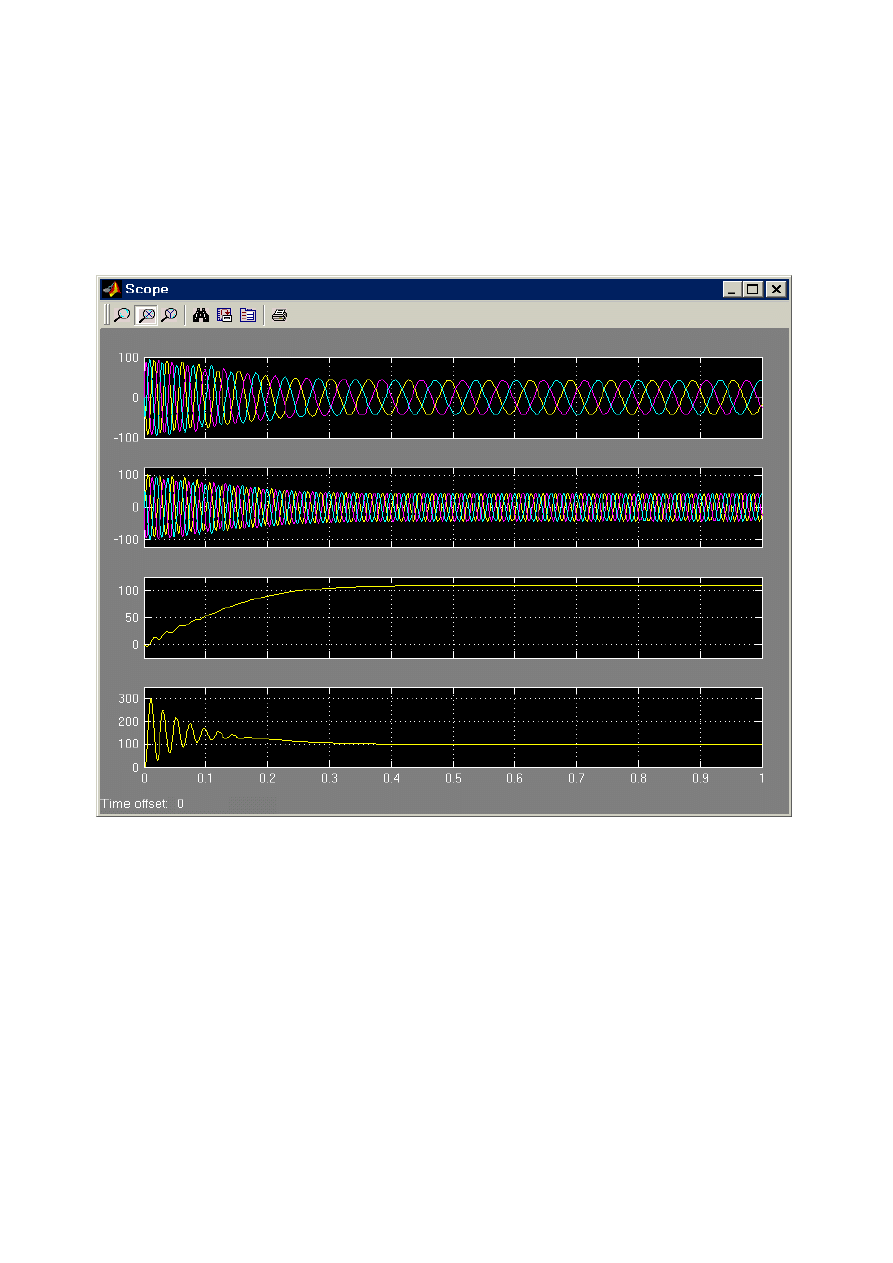
maszyny. Na rys 7.1 pokazano wyniki symulacji przy М
N
=30 Nm, a na rys. 7.5 – czasowe
zależności stanów nieustalonych maszyny.
Rys. 7.5. Zależność zmiennych stanu maszyny w czasie
42
Budowa zależności pobieranej z sieci mocy biernej od strumienia wzbudzenia zgodnie z p. 3.2
odbywa się na modelu (rys. 7.1) przy stałej wartości momentu obciążenia, który równia się
wartości znamionowej. Strumień maksymalny w polu Flux induced magnets (rys. 7.2) należy
zadać w granicach 0.8 – 1.0 Wb ze skokiem 0.01 Wb. Dla każdej wartości strumienia należy
prowadzić symulację, wyniki podać w tabeli 7.2.
Таbela 7.2
Ф
m
( Wb)
Q (VAr)
6. Zawartość sprawozdania.
6.1. Schemat modeli i opis bloków wirtualnych.
6.2. Mechaniczna charakterystyka maszyny w stanie pracy silnikowej.
6.3. Robocze charakterystyki maszyny w stanie pracy silnikowej.
6.4. fukcjonalna zależność Q od Ф
m
.

43
Wyszukiwarka
Podobne podstrony:
MiTE wykL,ad 7 8 wersja 01 id 3 Nieznany
2009 10 13 Wstep do SI [w 01]id Nieznany
(PRZEKROJ TEOWY 2002 12 01)id 1 Nieznany
Neurofizjologia Cwiczenia 01 id Nieznany
Pierwsza pomoc Cwiczenia 01 id Nieznany
Fizykoterapia Cwiczenia 01 id 1 Nieznany
MiTE wykL,ad 7 8 wersja 01 id 3 Nieznany
NLP Magazine 01 id 320421 Nieznany
I CKN 316 01 1 id 208193 Nieznany
domowe2 01 id 140222 Nieznany
CHORZOW1 TRAGEDIA 28 01 2006 id Nieznany
Cwiczenie 01 id 98935 Nieznany
HUR2006 01 id 207254 Nieznany
IMW W03 Modelowanie ukladow id Nieznany
01 id 539970 Nieznany (2)
312[01] 05 092 CZERWIEC 2009 id Nieznany (2)
26(2009) art23 Modelowanie id 3 Nieznany
ais 01 id 53429 Nieznany (2)
więcej podobnych podstron