
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
MINISTERSTWO EDUKACJI
NARODOWEJ
Jacek Przepiórka
Charakteryzowanie maszyn i urządzeń
311[35].Z2.01
Poradnik dla ucznia
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy
Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
1
Recenzenci:
dr inż. Jan Żarłok
mgr inż. Jan Skiba
Opracowanie redakcyjne:
dr inż. Jacek Przepiórka
Konsultacja:
mgr inż. Zdzisław Feldo
Poradnik stanowi obudowę dydaktyczną programu jednostki modułowej 311[35].Z2.01,
„Charakteryzowanie maszyn i urządzeń”, zawartego w modułowym programie nauczania dla
zawodu technik technologii wyrobów skórzanych.
Wydawca
Instytut Technologii Eksploatacji – Państwowy Instytut Badawczy, Radom 2007

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
2
SPIS TREŚCI
1. Wprowadzenie
3
2. Wymagania wstępne
5
3. Cele kształcenia
6
4. Materiał nauczania
7
4.1. Podstawy mechaniki i wytrzymałości materiałów
7
4.1.1. Materiał nauczania
7
4.1.2. Pytania sprawdzające
15
4.1.3. Ćwiczenia
15
4.1.4. Sprawdzian postępów
16
4.2. Wybrane zagadnienia z części maszyn
17
4.2.1. Materiał nauczania
17
4.2.2. Pytania sprawdzające
33
4.2.3. Ćwiczenia
34
4.2.4. Sprawdzian postępów
35
4.3.Podstawy elektrotechniki i automatyki przemysłowej
36
4.3.1. Materiał nauczania
36
4.3.2. Pytania sprawdzające
48
4.3.3. Ćwiczenia
48
4.3.4. Sprawdzian postępów
50
5. Sprawdzian osiągnięć
51
6. Literatura
55

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
3
1. WPROWADZENIE
Poradnik ten będzie Ci pomocny w przyswajaniu wiedzy dotyczącej charakteryzowania
maszyn i urządzeń.
W poradniku znajdziesz:
−
wymagania wstępne – wykaz umiejętności, jakie powinieneś mieć już ukształtowane,
abyś bez problemów mógł korzystać z poradnika,
−
cele kształcenia – wykaz umiejętności, jakie ukształtujesz podczas pracy z poradnikiem,
−
materiał nauczania – wiadomości teoretyczne niezbędne do osiągnięcia założonych celów
kształcenia i opanowania umiejętności zawartych w jednostce modułowej,
−
zestaw pytań, abyś mógł sprawdzić czy już opanowałeś określone treści,
−
ćwiczenia, które pomogą Ci zweryfikować wiadomości teoretyczne oraz ukształtować
umiejętności praktyczne,
−
sprawdzian postępów,
−
sprawdzian osiągnięć, przykładowy zestaw zadań. Zaliczenie testu potwierdzi
opanowanie materiału całej jednostki modułowej,
−
literaturę uzupełniającą.
Miejsce jednostki modułowej w strukturze modułu 311[35].Z2 „Maszyny i urządzenia do
produkcji wyrobów skórzanych” jest wyeksponowane na schemacie zamieszczonym na
stronie 4.
Bezpieczeństwo i higiena pracy
W czasie pobytu w pracowni musisz przestrzegać regulaminów, przepisów bhp
i instrukcji przeciwpożarowych, wynikających z rodzaju wykonywanych prac. Wiadomości
dotyczące przepisów bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej oraz
ochrony środowiska znajdziesz w jednostce modułowej 311[35].O1.01 „Przestrzeganie
przepisów bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej oraz ochrony
środowiska”.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
4
Schemat układu jednostek modułowych
311[35].Z2
Maszyny i urz
ądzenia
do produkcji wyrobów skórzanych
311[35].Z2.02
U
żytkowanie maszyn
i urz
ądzeń do rozkroju
311[35].Z2.03
U
żytkowanie maszyn i urządzeń
do monta
żu oraz wykończania
wyrobów
311[35].Z2.01
Charakteryzowanie
maszyn i urz
ądzeń

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
5
2. WYMAGANIA WSTĘPNE
Przystępując do realizacji programu nauczania jednostki modułowej powinieneś umieć:
−
stosować przepisy bezpieczeństwa i higieny pracy, ochrony środowiska i ochrony
przeciwpożarowej podczas montażu i demontażu maszyn i urządzeń,
−
korzystać z różnych źródeł informacji,
−
organizować stanowisko pracy zgodnie z wymogami ergonomii,
−
rozróżniać materiały konstrukcyjne,
−
posługiwać się dokumentacją konstrukcyjną i technologiczną,
−
stosować i zamieniać jednostki układu SI,
−
wykonywać proste obliczenia matematyczne,
−
użytkować komputer,
−
współpracować w grupie.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
6
3. CELE KSZTAŁCENIA
W wyniku realizacji programu jednostki modułowej powinieneś umieć:
−
wyjaśnić podstawowe prawa i zasady z zakresu mechaniki, wytrzymałości materiałów,
elektromechaniki, hydromechaniki, termodynamiki i elektroniki,
−
sklasyfikować maszyny i urządzenia w zależności od budowy, zasady działania
i zastosowania praktycznego,
−
rozróżnić części maszyn oraz wyjaśnić ich konstrukcję,
−
wyjaśnić zasadę działania maszyn i urządzeń oraz możliwości ich zastosowania
w produkcji wyrobów skórzanych,
−
wyjaśnić pojęcia tolerancji i pasowania części maszyn,
−
scharakteryzować typy i rodzaje połączeń stosowanych w maszynach,
−
wyjaśnić działanie łożysk, osi, wałów, sprzęgieł, hamulców, przekładni oraz ich
zastosowanie,
−
wyjaśnić budowę, działanie, zastosowanie różnego rodzaju pomp oraz wentylatorów
i dokonać ich klasyfikacji,
−
scharakteryzować napędy i sterowanie: hydrauliczne, pneumatyczne i elektryczne,
−
scharakteryzować parametry techniczne maszyn,
−
wyjaśnić działanie i zastosowanie mechanizmów: wieloprzegubowych, krzywkowych
oraz o ruchu ciągłym i przerywanym,
−
określić zasady eksploatacji maszyn,
−
zastosować przepisy bezpieczeństwa i higieny pracy, ochrony przeciwpożarowej oraz
wymagania ergonomii podczas eksploatacji maszyn, urządzeń i narzędzi.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
7
a)
4. MATERIAŁ NAUCZANIA
4.1. Podstawy mechaniki i wytrzymałości materiałów
4.1.1. Materiał nauczania
Mechanika jest działem nauki zajmującym się ruchem ciała oraz przyczynami
powodującymi ten ruch. Wyróżnia się trzy duże działy: statykę, kinematykę i dynamikę.
Statyka bada warunki równowagi, kinematyka opisuje ruch z punktu widzenia torów,
prędkości i przyspieszeń natomiast dynamika opisuje związki przyczynowe między siłami
i ruchami ciał.
W mechanice spotykamy się z dwoma rodzajami wielkości. Są to wielkości wektorowe
i skalarne. Na przykład: siłę mierzymy w niutonach, prędkość w m/s, przyśpieszenie w m/s
2
,
masę w kg. Niektóre wielkości nie mają miana, gdyż są określane przez stosunek dwóch
wielkości o tym samym mianie. Na przykład: współczynnik tarcia, liczba Poissona,
wydłużenie względne. Wielkości mechaniczne i fizyczne są przedstawiane za pomocą
jednostek tworzących układy SI.
Wielkość skalarna określa wyłączanie liczbę jednostek przyjętych za pomiarową, np.:
czas, długość, powierzchnia, objętość, masa, temperatura itd.
Wielkość wektora (wektor) wymaga następujących określeń: punktu przyłożenia,
kierunku działania wyznaczonego linią prostą, zwrotu, liczby jednostek przyjętych za
pomiarowe, czyli modułu danego wektora.
Siła – mechaniczne wzajemne oddziaływanie ciał, które może być bezpośrednie (gdy
ciała się stykają) lub pośrednie (oddziaływanie na odległość). Każdą siłę definiuje: wartość,
kierunek, zwrot oraz punkt zaczepienia, dlatego siła jest wektorem.
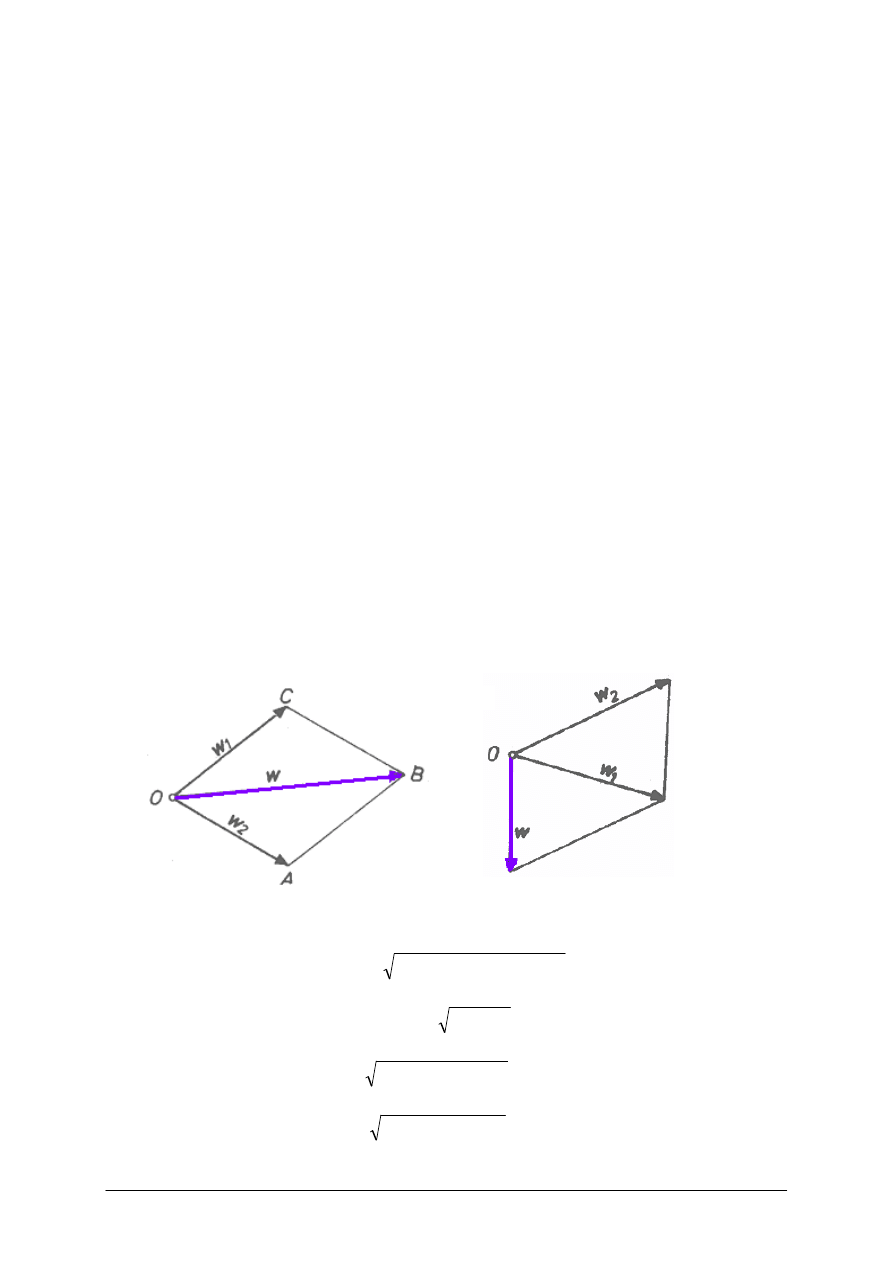
Siłę podobnie jak wektor możemy dodawać i odejmować metodą geometryczną
(rysunek 1) i analityczną.
Rys. 1. Dodawanie (a) i odejmowanie (b) wektorów (sił) metodą geometryczną [1, s. 40].
W przypadku analitycznego obliczania wartości wektora otrzymujemy:
α
+
+
=
cos
w
w
2
w
w
w
2
1
2
2
2
1
,
jeżeli α = 90
0
, to
2
2
2
1
w
w
w
+
=
,
dla α = 0
0
, to
2
1
2
1
2
2
2
1
w
w
w
w
2
w
w
w
+
=
+
+
=
,
jeżeli α = 180
0
, to
2
1
2
1
2
2
2
1
2
w
w
w
w
w
w
w
−
=
−
+
=
.
b)
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
8
W praktyce bardzo często spotykamy się z koniecznością rozkładu siły na dwie składowe
i jest to zagadnienie odwrotne do składania sił (lub wektorów).
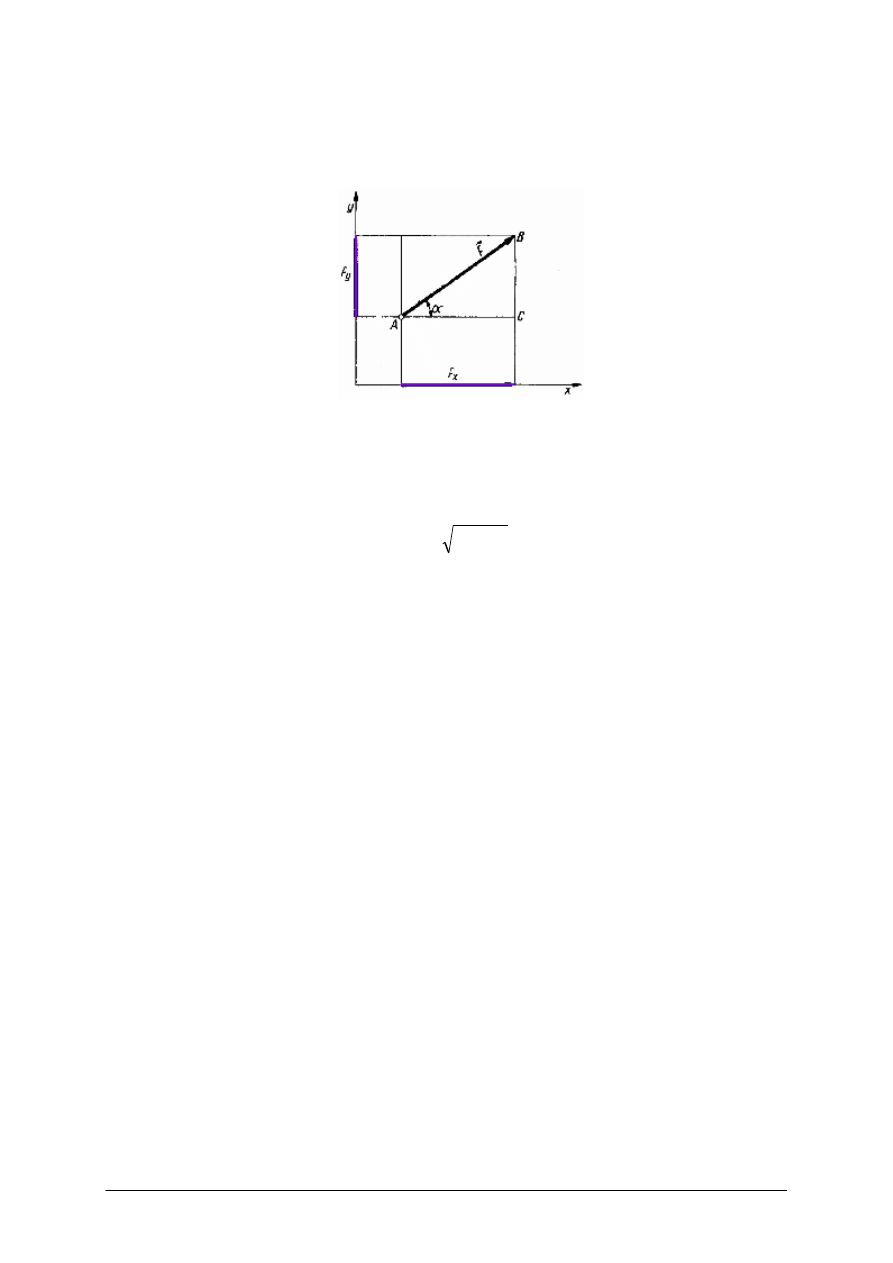
Rzutem siły na dowolną oś nazywamy wielkość odcinka łączącego rzut początku i końca
danej siły ma tę oś. Graficzną interpretacje rzutowania siły na oś przedstawiono na rysunku 2.
Rys. 2. Graficzna ilustracja rzutu siły w układzie współrzędnych [2, s. 36].
Korzystając z funkcji trygonometrycznych i twierdzenia Pitagorasa łatwo obliczyć że:
F
x
= Fcos
α
i
F
y
= Fsin
α
oraz
2
y
2
x
F
F
F
+
=
Warunkiem równowagi dla płaskiego układu sił jest zerowa wypadkowa sumy sił
działających na os X i oś Y. Analityczny zapis tego warunku przyjmują postać:
0
F
ix
=
∑
∑
=
0
F
iy
Warunki równowagi płaskiego układu sił zbieżnych stosowane są do wyznaczania sił oraz
reakcji (odpowiedzi układu na siły) w zadaniach z zakresu statyki.
Momentem siły F
r
względem punktu O nazywamy iloczyn wartości tej siły przez ramię
jej działania, czyli odległości obranego punktu od linii działania tej siły.
M
o
= F · r
Moment może przyjmować wartość dodatnią lub ujemną w zależności od przyjętego
założenia, przy czym należy pamiętać aby przyjęte zasady stosować konsekwentnie w całym
analizowanym układzie. Najczęściej moment uważamy za dodatni, jeśli siła dąży do
obrócenia swojego ramienia r dookoła bieguna O w kierunku niezgodnym z ruchem
wskazówek zegara. Jeśli dąży do obrócenia swojego ramienia r w kierunku zgodnym
z ruchem wskazówek zegara, moment uważamy za ujemny. Przykład momentu dodatniego
i ujemnego pokazano na rysunku 3.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
9
Rys. 3. Graficzna ilustracja określania znaku momentu siły [2, s. 47].
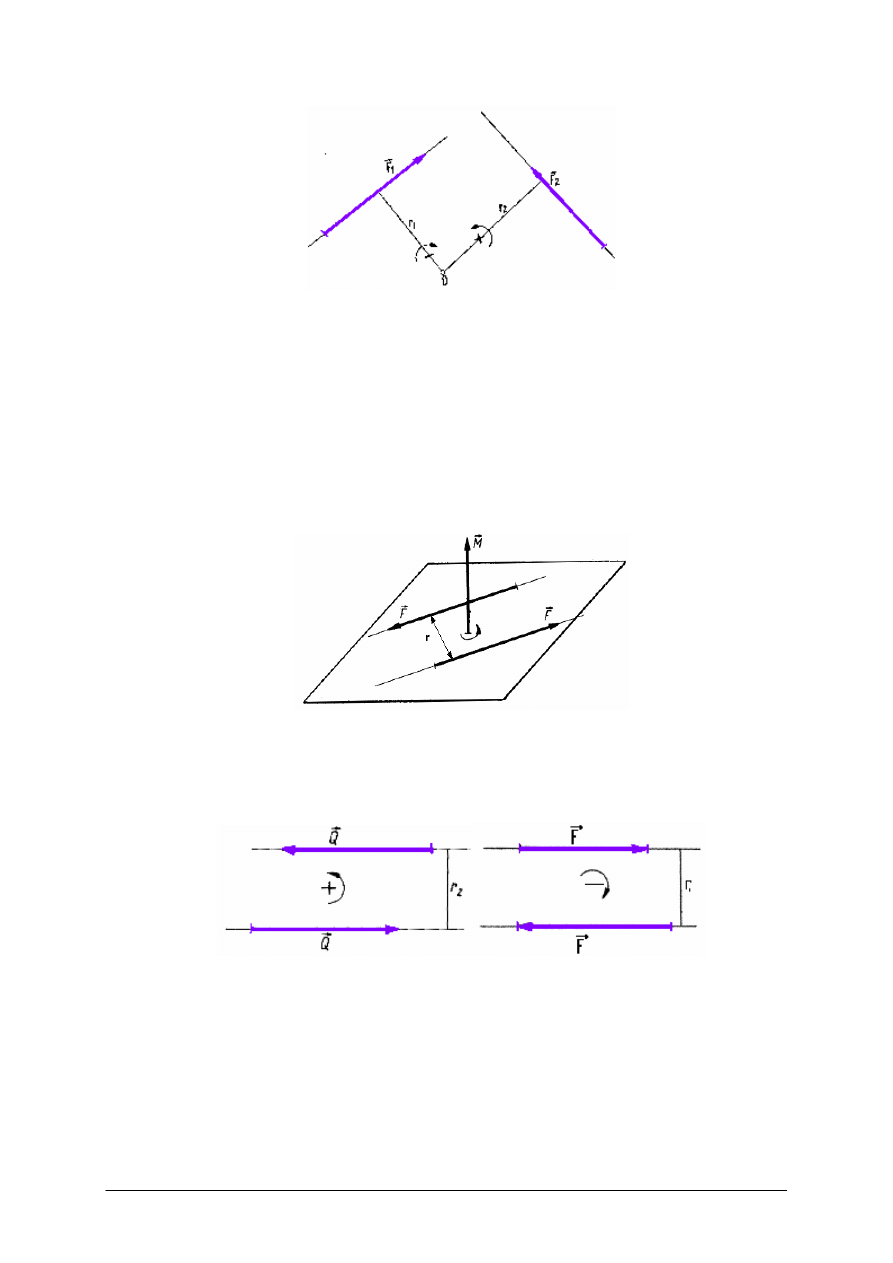
Podczas odkręcania śrub w kołach samochodowych kluczem „krzyżowym” w celu
zwiększenia siły używamy obu rąk jednocześnie. Jest to przykład zastosowania pary sił.
Parą sił nazywamy układ dwóch sił o równych wartościach i jednakowych kierunkach,
lecz o przeciwnych zwrotach. Odległości pomiędzy liniami działania obu sił oznaczamy przez
„r” i nazywamy ramieniem pary. Para sił posiada moment równy iloczynowi wartości jednej
z sił przez ramie pary. Podobnie jak w przypadku momentu siły, moment pary oznaczany
literką M. Na rysunku 4 przedstawiono parę sił oraz wektor momentu od nich pochodzącego.
M = F · r
Rys. 4. Moment skręcający wytwarzany przez parę sił [2, s. 53].
Para sił posiada moment, który może mieć znak dodatni lub ujemny podobnie jak
moment siły. Zasada określania wartości momentu pary jest identyczna jak w przypadku
momentu siły i jej graficzną ilustrację obrazuje rysunek 5.
Rys. 5. Graficzna ilustracja określania znaku momentu pary [2, s. 52].
Warunki równowagi płaskiego układu sił zbieżnych mogą okazać się niewystarczające
w przypadku układu obciążonego siłami o różnych kierunkach działania. Układ taki
nazywamy dowolnym układem płaskim sił i aby znajdował się w równowadze, muszą być
spełnione trzy analityczne warunki:
1. suma algebraiczna rzutów wszystkich sił na oś x musi równać się zeru,
2. suma algebraiczna rzutów wszystkich sił na oś y musi równać się zeru
3. suma algebraiczna momentów wszystkich sił względem dowolnego bieguna musi równać
się zeru.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
10
Warunki równowagi dowolnego płaskiego układu sił zapisuje się w postaci równań:
=
=
=
∑
∑
∑
0
M
0
F
0
F
i
iy
ix
Wykorzystując powyższy układ równań możemy obliczyć reakcje występujące
w punktach podparcia bryły obciążonej dowolnie przyłożonymi siłami znajdującymi się na
jednej płaszczyźnie. Ponieważ możemy ułożyć tylko trzy równania, dlatego liczba
niewiadomych występujących w tych równaniach nie może być większa od tej liczby.
Wprowadzenie do wytrzymałości materiałów
Pod wpływem przyłożonej siły w materiałach występują naprężenia, które mogą
powodować zmianę kształtu, a nawet uszkodzić materiał. Badaniem zależności pomiędzy
kształtem części, obciążeniem i własnościami mechanicznymi materiału zajmuje się dział
nauki nazywany wytrzymałością materiałów. Materiały stosowane na części konstrukcyjne
maszyn, będące przedmiotem badań nauki o wytrzymałości materiałów, charakteryzują
następujące własności:
−
sprężystość, tj. zdolność powrotu do postaci pierwotnej po usunięciu obciążenia, które
wywołało odkształcenie,
−
plastyczność, tj. zdolność do odkształceń trwałych, czyli nie znikających po usunięciu
obciążeń,
−
kruchość czyli pękanie materiału zanim osiągnąłby on odkształcenie trwałe,
−
twardość czyli odporność na uszkodzenia przy wywieraniu nacisku na powierzchnię
materiału,
−
wytrzymałość, tj. największa wartość obciążenia, po przekroczeniu której część
konstrukcyjna ulega zniszczeniu.
W celu wyznaczenia wytrzymałości materiałów konstrukcyjnych przeprowadza się
rozciąganie próbki wykonanej z badanego materiału na maszynie nazywanej zrywarką.
Wytrzymałość na rozciąganie R
m
określona w wyniku próby rozciągania danego
materiału wyznacza maksymalną wartość siły F
max
, po przekroczeniu której pręt
o przekroju początkowym S pracujący na rozciąganie ulega zerwaniu.
S
R
F
m
max
=
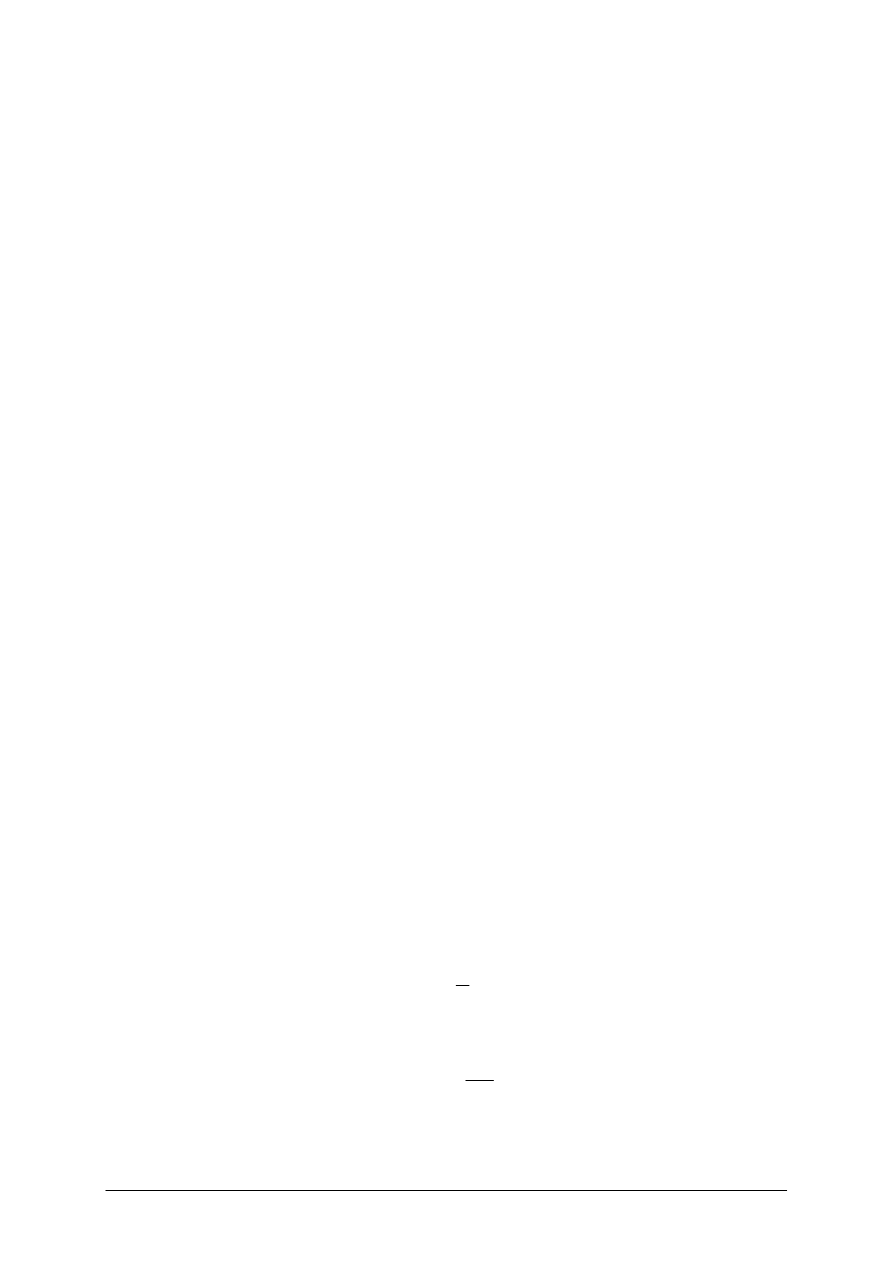
Wykres rozciągania próbki wykonanej ze stali niskowęglowej pokazano na rysunku 6.
W elementach konstrukcyjnych części maszyn nie można dopuścić do tego, aby
naprężenia osiągnęły tę graniczną wartość. W celu zabezpieczenia się przed taką
ewentualnością, należy przyjąć pewną, nieprzekraczalną w warunkach normalnej pracy,
wartość naprężenia, zwaną naprężeniem dopuszczalnym na rozciąganie i oznaczaną
r
k .
Obliczenie wytrzymałościowe elementu rozciąganego sprowadza się wtedy do sprawdzenia,
czy spełniony jest warunek:
r
k
S
F ≤
=
σ
Naprężenie dopuszczalne na rozciąganie
r
k jest z zasady dużo mniejsze od
m
R
i obliczane z zależności
n
R
k
m
r
=
Współczynnik n jest liczbą większą od jedności i nosi nazwę współczynnika
bezpieczeństwa.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
11
Rys. 6. Przebieg krzywej rozciągania dla stali niskowęglowej (do 0,30%
C).
Podobnie jak
r
k określa się dopuszczalne naprężenia dla pozostałych rodzajów naprężeń
występujących w częściach maszyn, takich jak: k
c
, k
t
, k
s
, k
g
- ściskanie, ścinanie, skręcanie,
zginanie. Wartość współczynnika bezpieczeństwa waha się w dość dużych granicach,
orientacyjnie od 2 do 15. Im większa jest wartość tego współczynnika, tym większą mamy
pewność, że konstrukcja nie zostanie zniszczona pod działaniem wewnętrznych naprężeń.
Jednocześnie
jednak
konstrukcja
taka
jest
bardziej
materiałochłonna.
Wartość
współczynników bezpieczeństwa zależy między innymi od rodzaju obciążenia, rodzaju
materiału, z jakiego konstrukcja jest wykonana, kształtu elementy konstrukcyjnego, czasu
pracy obliczanej konstrukcji, możliwości występowania wad wewnętrznych w materiale
konstrukcyjnym, możliwości występowania nieprzewidzianych dodatkowych obciążeń
konstrukcji, ważności danego elementu w konstrukcji z punktu widzenia konsekwencji, jaką
może pociągnąć zniszczenie obliczanego elementu.
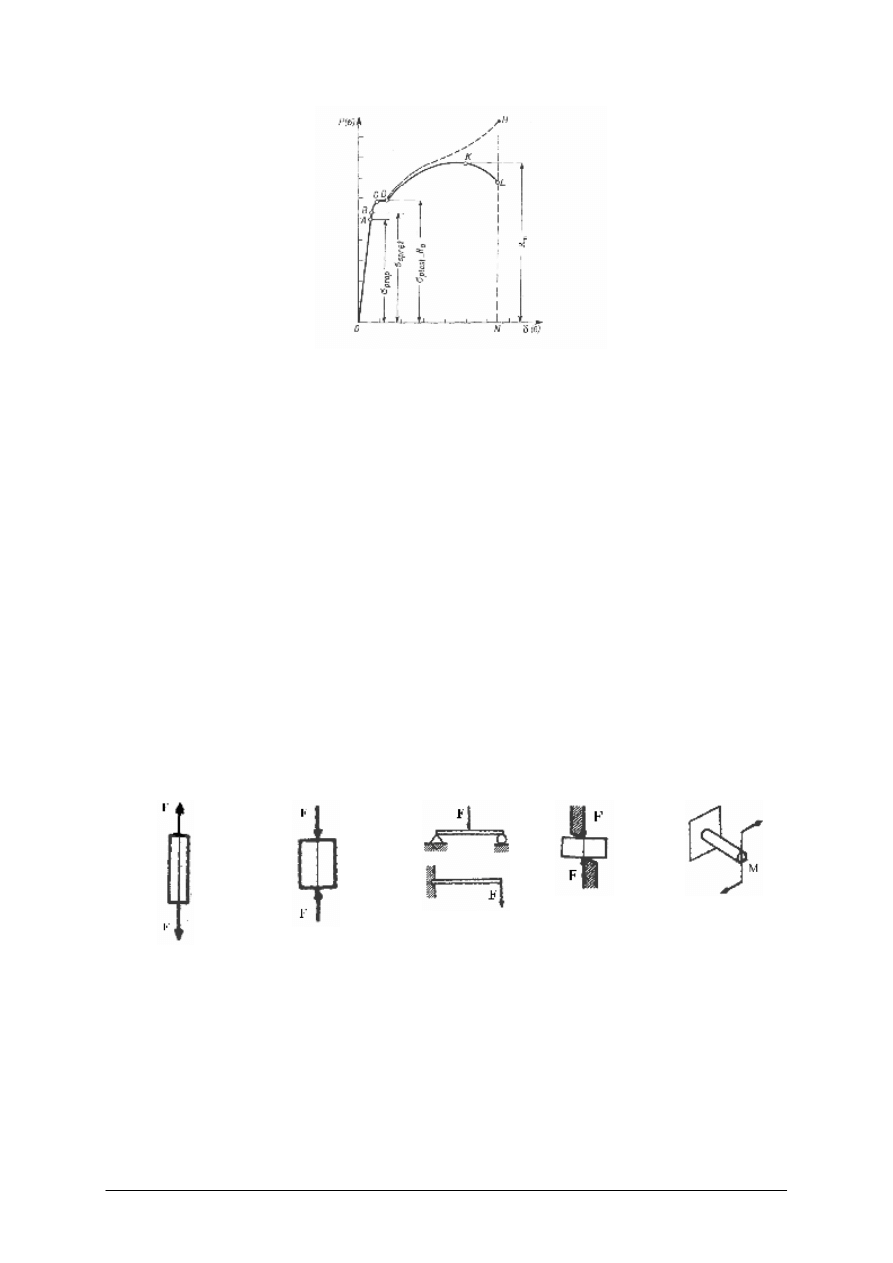
Klasyfikacja obciążeń
Działając na ciało siłą zewnętrzną, w zależności od sposobu przyłożenia tej siły można
wywołać różne odkształcenia, których podstawową klasyfikację zamieszczono na rysunku 7.
Rozciąganie
Ściskanie
Zginanie
Ścinanie
Skręcanie
Rys. 7. Główne rodzaje obciążeń prostych.
Przy obliczaniu wytrzymałości na rozciąganie i ściskanie przyjmuje się, że zniszczenie
elementu konstrukcyjnego z danego materiału nastąpi w przekroju o najmniejszej
powierzchni. Dlatego, jeżeli rozciągany element ma zmienną powierzchnię przekroju
w płaszczyznach prostopadłych do kierunku działania siły, to do obliczeń należy zawsze
przyjąć powierzchnię o najmniejszym przekroju, czyli niebezpieczną. Pręty, które
charakteryzują się dużą wysokością i małą powierzchnią przekroju, są dodatkowo obliczane
na wyboczenie.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
12
Podstawowe równania wytrzymałości materiałów przy rozciąganiu i ściskaniu można
przedstawić następująco:
c
c
r
r
k
S
F
,
k
S
F
≤
=
σ
≤
=
σ
gdzie:
c
r
σ
σ , - naprężenia rozciągające i ściskające [MPa],
c
r
k
k ,
- dopuszczalne naprężenia przy rozciąganiu i ściskaniu [MPa],
S- powierzchnia przekroju [m
2
],
F- obciążenie, siła [N].
Ścinanie występuje prawie we wszystkich konstrukcjach maszynowych. Przy ścinaniu
siły zewnętrzne sprowadzają się do dwóch sił równych sobie i leżących w płaszczyźnie
ścinanego przekroju. Siły te nazywamy siłami tnącymi lub ścinającymi. Powodują one
przesunięcie względem siebie dwóch części ciała w płaszczyźnie przekroju. Na wytrzymałość
przy ścinaniu obliczamy zazwyczaj nity, śruby, wpusty, kliny, spoiny. Istota obliczeń
wytrzymałościowych przy ścinaniu polega na określaniu jednej wartości na podstawie dwóch
znanych. Tymi wartościami są pola powierzchni przekroju, obciążenie ścinające
i dopuszczalne naprężenia na ścinanie.
Podstawowe równanie wytrzymałościowe przy ścinaniu możemy napisać w następującej
postaci:
t
k
S
F
≤
=
τ
gdzie:
τ - naprężenie ścinające [MPa],
S - powierzchnia przekroju [m
2
],
t
k - dopuszczalne naprężenia na ścinanie [MPa],
F - obciążenie danego elementu konstrukcyjnego [N].
Czyste zginanie występuje wtedy, gdy wszystkie siły zewnętrzne działające na belkę po
jednej stronie od rozpatrywanego przekroju sprowadzą się do pary sił położonej
w płaszczyźnie zawierającej oś pręta - lub równoległej do niej.
Z doświadczeń wynika, że poprzeczne przekroje zginanego pręta nachylają się względem
siebie, włókna górne wydłużają się, dolne ulegają skróceniu, a początkowo prostokątny
przekrój porzeczny pręta na skutek zginania przybiera kształt trapezu równoramiennego.
W podręcznikach technicznych wprowadza się pojęcie naprężenia dopuszczalnego na
zginanie
g
k , dla którego warunek wytrzymałościowy pręta zginanego przedstawi przybiera
postać:
g
x
g
g
k
W
M
≤
=
σ
gdzie:
g
σ - naprężenie gnące [MPa],
M
g
- maksymalny moment gnący [Nm],
W
x
- wskaźnik wytrzymałości przekroju na zginanie [m
3
],
k
g
- dopuszczalne naprężenia gnące [MPa].
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
13
Skręcanie powodowane jest działaniem dwóch par sił występujących w dwóch różnych
płaszczyznach prostopadłych do osi pręta.
Warunek wytrzymałościowy dla pręta skręcanego wyraża się wzorem:
s
0
s
max
k
W
M ≤
=
τ
gdzie:
max
τ
- naprężenie skręcające [MPa],
M
s
- maksymalny moment skręcający [Nm],
W
o
- wskaźnik wytrzymałości przekroju na skręcanie [m
3
],
k
s
- dopuszczalne naprężenia gnące [MPa].
Momenty bezwładności i wskaźniki wytrzymałości dla wybranych przekrojów
geometrycznych dla zginania i skręcania są podawane w poradnikach technicznych.
Obciążenia niektórych elementów powodują równocześnie zginanie i skręcanie, zginanie
i ściskanie, rozciąganie i zginanie itd. Tego rodzaju obciążenie nazywamy obciążeniem
złożonym. Przy obciążeniu złożonym w przekroju elementu występują naprężenia jednorodne
lub różnorodne. W przypadku naprężeń jednorodnych (normalnych lub stycznych) naprężenie
całkowite jest algebraiczną sumą naprężeń składowych. Jeżeli naprężenia normalne i styczne
są różnorodne, to naprężenia zastępcze obliczamy według hipotez wytrzymałościowych.
Najczęściej do obliczania naprężeń zastępczych powstających w materiałach plastycznych
stosowana jest hipoteza energii czystego odkształcenia postaciowego (Hubera). Dla typowego
złożonego obciążenia spotykanego w obliczeniach wytrzymałościowych wałów, hipoteza
Hubera przybiera postać:
2
s
2
g
z
M
75
,
0
M
M
+
=
gdzie:
M
z
- moment zastępczy [Nm],
M
g
- moment gnący [Nm],
M
s
- moment skręcający [Nm].
Wieloletnie badania wytrzymałościowe prowadzone w różnych krajach wykazują,
że wzory Hubera są najbardziej zgodne z rzeczywistością.
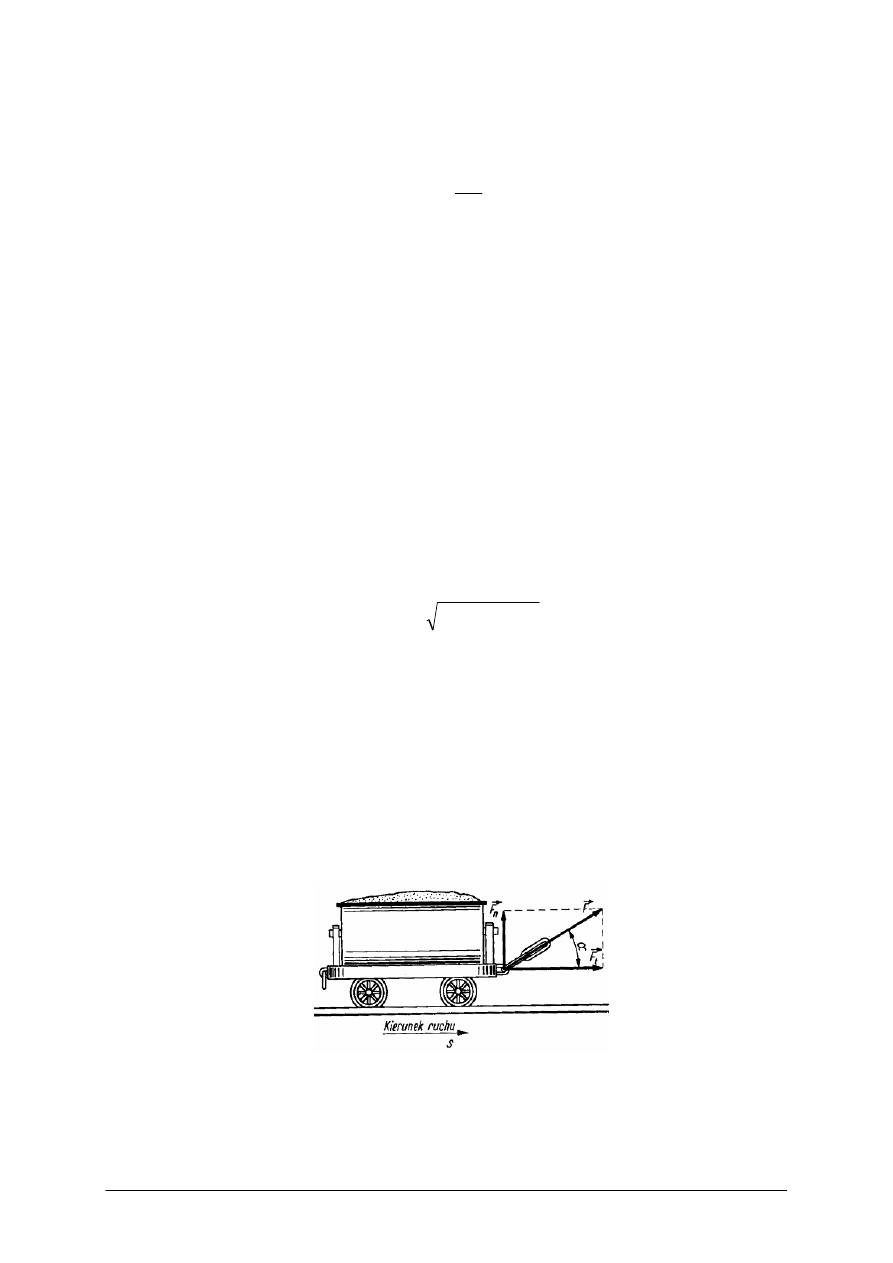
Pojęcia mechaniki klasycznej opisujące: pracę, moc, energię, sprawność maszyn i tarcie
Pracą nazywamy wielkość skalarną L, określoną iloczynem siły i przesunięcia.
Analizując rozkład sił na rysunku 8 możemy stwierdzić, że:
Rys. 8. Rozkład sił podczas przemieszczania wózka [2, s. 386].
L = F
t
⋅
s, ale
F
t
= F
⋅
cos
α
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
14
a) pracę wykonuje tylko ta składowa siły F, która działa wzdłuż przesunięcia (F
t
). Składowa
prostopadła do przesunięcia (F
n
) nie może wykonać pracy (np. siła odśrodkowa nie
wykonuje pracy),
b) w zależności od kąta
α
, siła F może wykonywać pracę dodatnią (gdy 0
°<
α
<
90
°
) lub
ujemną (gdy 90
°<α
<
180
°
) przy danym kierunku i określonym zwrocie przesunięcia s.
Jednostką pracy w układzie SI jest dżul. [1 dżul = 1 N
⋅
1 m = 1 J]
Pod pojęciem energii mechanicznej rozumiemy sumę energii kinetycznej i potencjalnej
zawartej w danym ciele.
E = E
k
+ E
p
gdzie:
- energia kinetyczna ruchu postępowego masy m poruszająca się
z prędkością v; energia kinetyczna jest równa pracy, jaka trzeba
wykonać, aby masie m nadać prędkość v,
E
p
= mgh - energia potencjalna ciała o masie m, znajdującego się na wysokości h nad
poziomem, który przyjęliśmy jako poziom zerowy energii potencjalnej.
Jednostką energii jest dżul.
Moc jest wielkością charakteryzującą zdolność maszyny lub urządzenia do wykonania
określonej pracy w określonym czasie.
t
L
P
=
, lub P
=
F
⋅v
Jednostką mocy w układzie SI jest wat
(
W). Maszyna posiada moc jednego wata, jeżeli
pracę 1 dżula wykonuje w 1 s.
Sprawnością
η
maszyny nazywamy stosunek pracy wykonanej przez tę maszyna (pracy
użytecznej) do pracy doprowadzonej do maszyny.
d
u
L
L
=
η
lub używając mocy
d
u
P
P
=
η
Sprawność każdej maszyny jest zawsze mniejsza od jedności (
η
<
1).
Przyczyną powstawania strat energii we wszystkich urządzeniach posiadających ruchome
elementy jest tarcie. Tarciem nazywamy zbiór zjawisk występujących w obszarze styku
dwóch przemieszczających się względem siebie ciał, w wyniku których powstają opory
ruchu. Miarą tarcia jest opór równoważony wypadkową siłą styczną podczas przemieszczania
jednego ciała względem drugiego. Dla celów metodycznych dokonuje się często podziału
rodzajów tarcia na:
Tarcie statyczne (spoczynkowe) występuje wówczas, gdy ciała nie zmieniają swojego
położenia względem siebie. Wyraża ono siłę, którą należy pokonać, aby zainicjować ich ruch
względny.
Tarcie dynamiczne (kinetyczne, ruchowe) to tarcie ciał znajdujących się w ruchu
względnym, wyrażające siłę, którą należy pokonać, aby trące się ciała utrzymać w ruchu.
Może ono występować jako tarcie toczne oraz ślizgowe.
Tarcie ślizgowe stanowi opór przesuwania się ciał względem siebie. Występuje ono
w ruchu postępowym, postępowo – zwrotnym, obrotowym i wahadłowym.
Tarcie toczne stanowi opór toczenia się ciał po powierzchni.
2
mv
E
2
k
=

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
15
Tarcie ze względu na lokalizację można podzielić na dwie zasadnicze grupy:
−
tarcie zewnętrzne powstaje przy powierzchniowym styku ciał. Zachodzi w warstwach
wierzchnich nie smarowanych ciał stałych, przemieszczających się względem siebie.
−
tarcie wewnętrzne powstaje wewnątrz jednego ciała, w którym przemieszczają się
względem siebie atomy, grupy atomów, cząstki chemiczne itp.
Ze względu na występowanie środka smarnego lub jego brak między trącymi się
powierzchniami rozróżnia się następujące rodzaje tarcia dynamicznego:
Tarcie technicznie suche – gdy powierzchnie trące mogą być pokryte tlenkami i warstwą
zaadsorbowanych gazów i par lecz sam proces tarcia odbywa się bez udziału środka
smarowego.
Tarcie graniczne – występuje, gdy powierzchnie trące obu ciał są oddzielone w strefie
styku warstwą substancji smarnej o najmniejszej grubości zależnej od przyczepności
substancji smarowej do powierzchni współpracujących ciał oraz od jej właściwości
reologicznych.
Tracie płynne – najbardziej pożądane występuje, gdy między współpracującymi
powierzchniami znajduje się warstwa substancji smarowej płynnej lub gazowej o znacznej
grubości oraz ciśnieniu równoważącym siły normalnego wzajemnego nacisku ciał.
Tarcie mieszane – przypadek pośredni między tarciem suchym a płynnym, podczas
którego w strefie styku trących ciał występują zjawiska charakterystyczne dla przynajmniej
dwóch z wymienionych rodzajów tarcia. Jest ono charakterystyczne dla węzłów tarcia
pracujących przy małych prędkościach, dużych naciskach oraz w stanach nieustalonych.
4.1.2. Pytania sprawdzające
Odpowiadając na pytania sprawdzisz czy jesteś przygotowany do wykonania ćwiczeń.
1. Co to jest wielkość skalarna i wektorowa?
2. Jakie znasz metody dodawania i odejmowania sił?
3. Jak można rozłożyć siłę na dwie składowe?
4. Jakie znasz podstawowe rodzaje obciążeń?
5. Czy podczas próby ściskania i rozciągania badana próbka może przenieść takie same
obciążenia?
6. W jaki sposób obliczamy naprężenia złożone?
7. Co to jest tarcie?
4.1.3. Ćwiczenia
Ćwiczenie 1
Analityczne i geometryczne dodawanie sił.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z treścią ćwiczenia,
2) zanalizować otrzymane przykłady,
3) zsumować metodą geometryczną wskazane siły,
4) metodą analityczną obliczyć sumę sił,
5) porównać otrzymane wyniki.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
16
Wyposażenie stanowiska:
−
papier w kratkę i papier milimetrowy,
−
przybory piśmiennicze,
−
przybory kreślarskie,
−
literatura z rozdziału 6.
Ćwiczenie 2
Przyporządkuj podstawowe obciążenia wyróżniane w mechanice do elementów dowolnej
maszyny przedstawionej na schemacie.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z treścią ćwiczenia,
2) zanalizować otrzymany schemat maszyny,
3) dopasować obciążenia do wybranych mechanizmów,
4) zaprezentować swoją pracę.
Wyposażenie stanowiska:
−
schematy kinematyczne maszyn,
−
przybory piśmiennicze,
−
literatura z rozdziału 6.
Ćwiczenie 3
Oblicz naprężenia, jakie powstają w nodze krzesła o średnicy 10mm, gdy na nim siedzisz.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z treścią ćwiczenia,
2) zanalizować rozkład sił w układach mechanicznych,
3) obliczyć naprężenia w jednej nodze krzesła,
4) zaprezentować swoją pracę.
Wyposażenie stanowiska:
−
kartki papieru ,
−
przybory piśmiennicze,
−
literatura z rozdziału 6.
4.1.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) rozróżnić cechy, jakie posiada wektor i skalar?
2) określić warunki równowagi płaskiego układu sił zbieżnych?
3) zdefiniować pojęcie siły i momentu siły?
4) określić warunki równowagi dowolnego płaskiego układu sił?
5) omówić i określić warunki zastosowania w obliczeniach energetycznej
hipotezy Hubera?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
17
4.2. Wybrane zagadnienia z części maszyn
4.2.1. Materiał nauczania
Tolerancja i pasowanie części maszyn
Wymiary długościowe są to wartości długości wyrażone określonymi liczbami
odpowiednich jednostek miar, np.: 31,5mm, 45µm, 2,3m.
Wymiar tolerowany jest to wymiar długościowy, którego dopuszczalne odchyłki są
liczbowo określone. Wymiarami tolerowanymi opisuje się na rysunkach technicznych
kształty części maszyn.
Wymiar rzeczywisty jest to wartość długości, jaką otrzymanoby po przeprowadzeniu
bezbłędnego pomiaru. W rzeczywistości poznaje się go tylko w pewnym przybliżeniu,
ponieważ każdy pomiar obarczony jest błędem pomiaru.
Wymiar zaobserwowany jest to wartość długości otrzymana w wyniku pomiaru
dokonanego z ustaloną dokładnością.
Wymiar długościowy tolerowany określają dwa wymiary graniczne:
−
wymiar górny B – większy wymiar graniczny,
−
wymiar dolny A – mniejszy wymiar graniczny.
W praktyce stosuje się zapisywanie wymiarów tolerowanych, poprzez tzw. tolerowanie
liczbowe. Wymiar tolerowany liczbowo składa się z trzech wymiarów, wyrażonych liczbami:
−
wymiaru nominalnego N,
−
odchyłki granicznej górnej es, ES,
−
odchyłki granicznej dolnej ei, EI.
Małymi literami (es, ei) oznacza się odchyłki graniczne wymiarów zewnętrznych
(wałków). Dużymi literami (ES, EI) oznacza się odchyłki graniczne wymiarów wewnętrznych
(otworów). Wymiar górny oznacza się B
w
dla wałka, B
o
dla otworu. Wymiar dolny oznacza
się A
w
dla wałka, A
o
dla otworu.
W ujęciu algebraicznym:
Odchyłka górna
N
B
es
w
−
=
- dotyczy wałka ,
N
B
ES
o
−
=
- dotyczy otworu.
Odchyłka dolna
N
A
ei
w
−
=
- dotyczy wałka ,
N
A
EI
o
−
=
- dotyczy otworu.
Tolerancja wymiaru
Tolerancja jest to różnica pomiędzy górnym wymiarem granicznym B a dolnym
wymiarem granicznym A lub pomiędzy odchyłką górna es (ES) a dolną ei (EI).
Tolerancja jest zawsze dodatnia i można ją obliczyć za pomocą wzorów.
A
B
T
−
=
lub
ei
es
T
−
=
lub
EI
ES
T
−
=
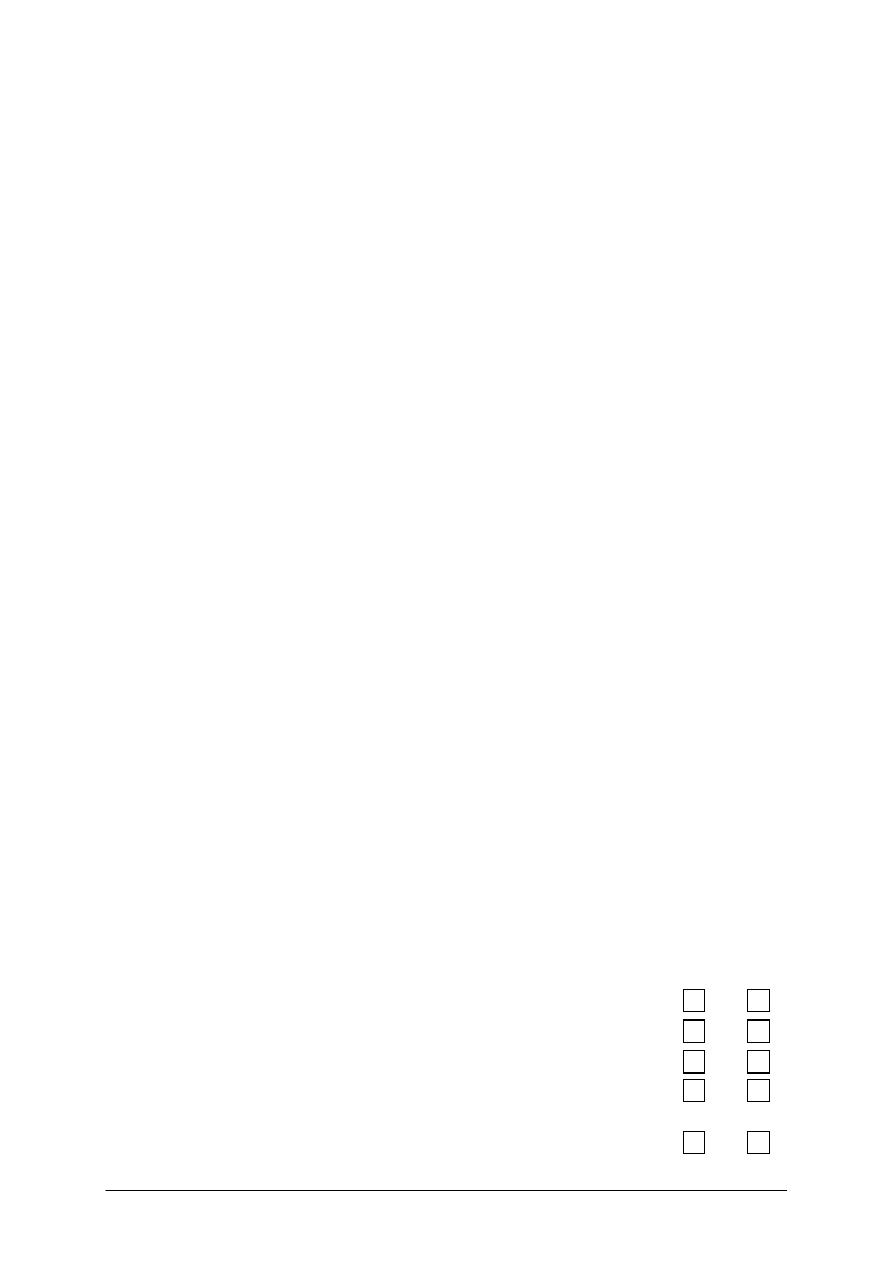
Graficznie położenie pola tolerancji przedstawia rysunek 9.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
18
Rys. 9. Wymiary graniczne dla pasowania luźnego: a) schemat pasowania, b) rozmieszczenie pola tolerancji
otworu, c) rozmieszczenie pola tolerancji wałka, d) rozmieszczenie pól tolerancji otworu i wałka [3, s.336]
Dla wszystkich wymiarów tolerowanych przyjęto system znakowania umożliwiający
szybkie rozpoznanie ich cech szczególnych. Zapis ich wartości liczbowych może być
podawany w postaci bezpośredniej jak np.
φ
08
,
0
05
,
0
150
+
−
albo pośredniej, za pomocą umownych
symboli cyfrowo – literowych.
Pasowanie, luz i wcisk pasowania
Pasowanie jest to współpraca wałka i otworu w umownym zrozumieniu znaczenia nazw
wałek i otwór. Miarą charakteru pasowania jest różnica między wymiarami otworu i wałka.
Luz jest to dodatnia lub równa zeru różnica wymiarów otworu i wałka. Wartość luzu
zaobserwowanego będzie zależała od wymiarów zaobserwowanych otworu i wałka.
Krańcowe dopuszczalne luzy, między którymi powinien być zawarty luz zaobserwowany
nazywa się luzami granicznymi.
Wcisk jest to wartość bezwzględna ujemnej różnicy wymiarów otworu i wałka przed ich
połączeniem. Gdy pasowanie jest tak zaprojektowane, że przy poprawnie wykonanych
elementach zawsze wystąpi wcisk, wówczas rozróżnić można dwa wciski graniczne, między
którymi powinien być zawarty wcisk zaobserwowany, tzn. wcisk najmniejszy W
min
i wcisk
największy W
max
.
Tolerancja pasowania T
p
jest to miara dokładności pasowania, będąca sumą tolerancji
wałka T
w
i otworu T
o
tworzących połączenie
o
w
p
T
T
T
+
=
Podział i charakterystyka pasowań
Charakter pasowania zależy od wzajemnego położenia pól tolerancji obu łączonych
elementów, zaś pasowania klasyfikuje się ze względu na mogące wystąpić odmiany miar
pasowania. Pasowania dzieli się na trzy rodzaje:
−
pasowania luźne,
−
pasowania ciasne,
−
pasowania mieszane.
Mechanizmy maszyn
Mechanizm maszynowy to łańcuch kinematyczny, w którym jeden człon jest członem
nieruchomym, tzw. ostają, pozostałe zaś wykonują ściśle określone ruchy. Każdy mechanizm
składa się z ostoi (podstawy), członu (lub członów) czynnego napędzającego, członu biernego
napędzanego lub roboczego oraz członu pośredniczącego, tzw. łącznika.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
19
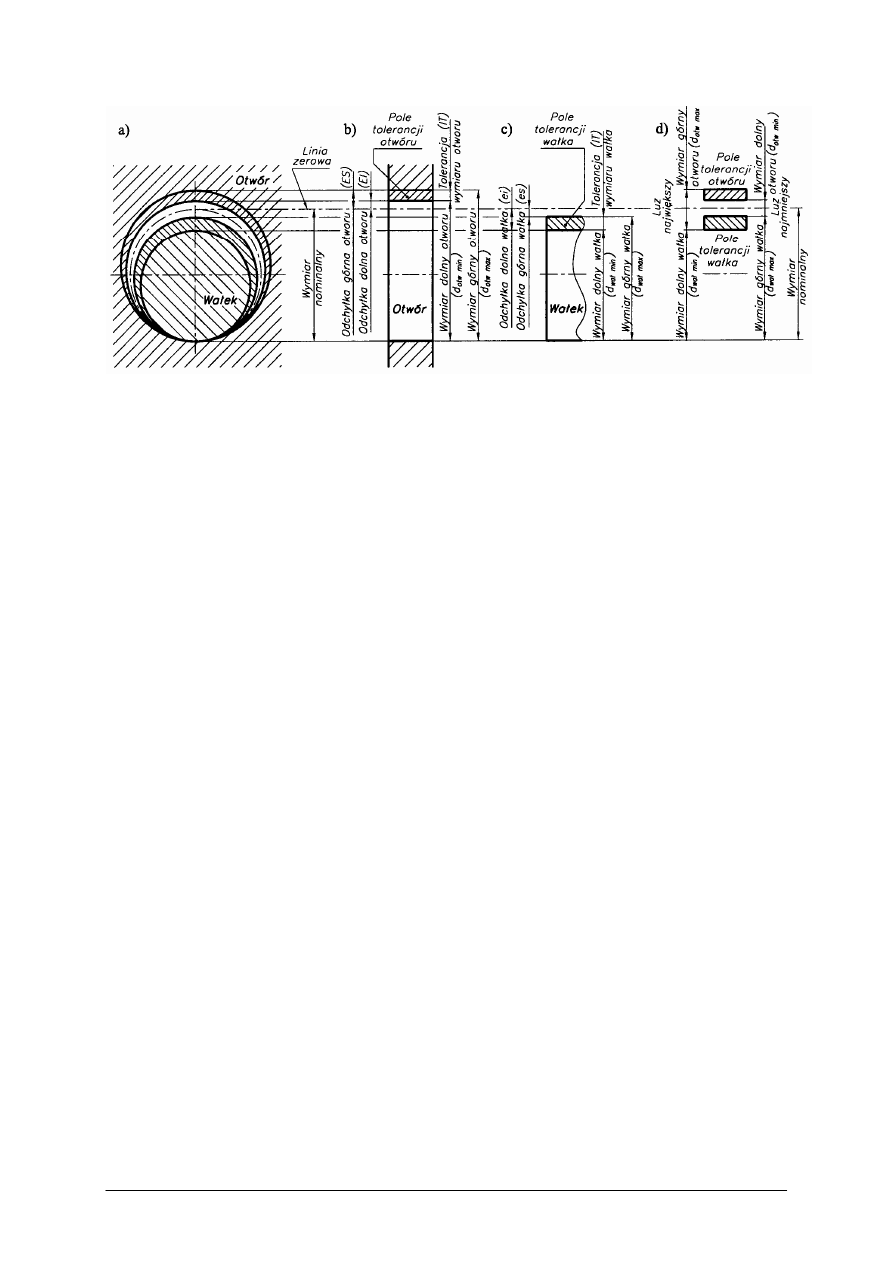
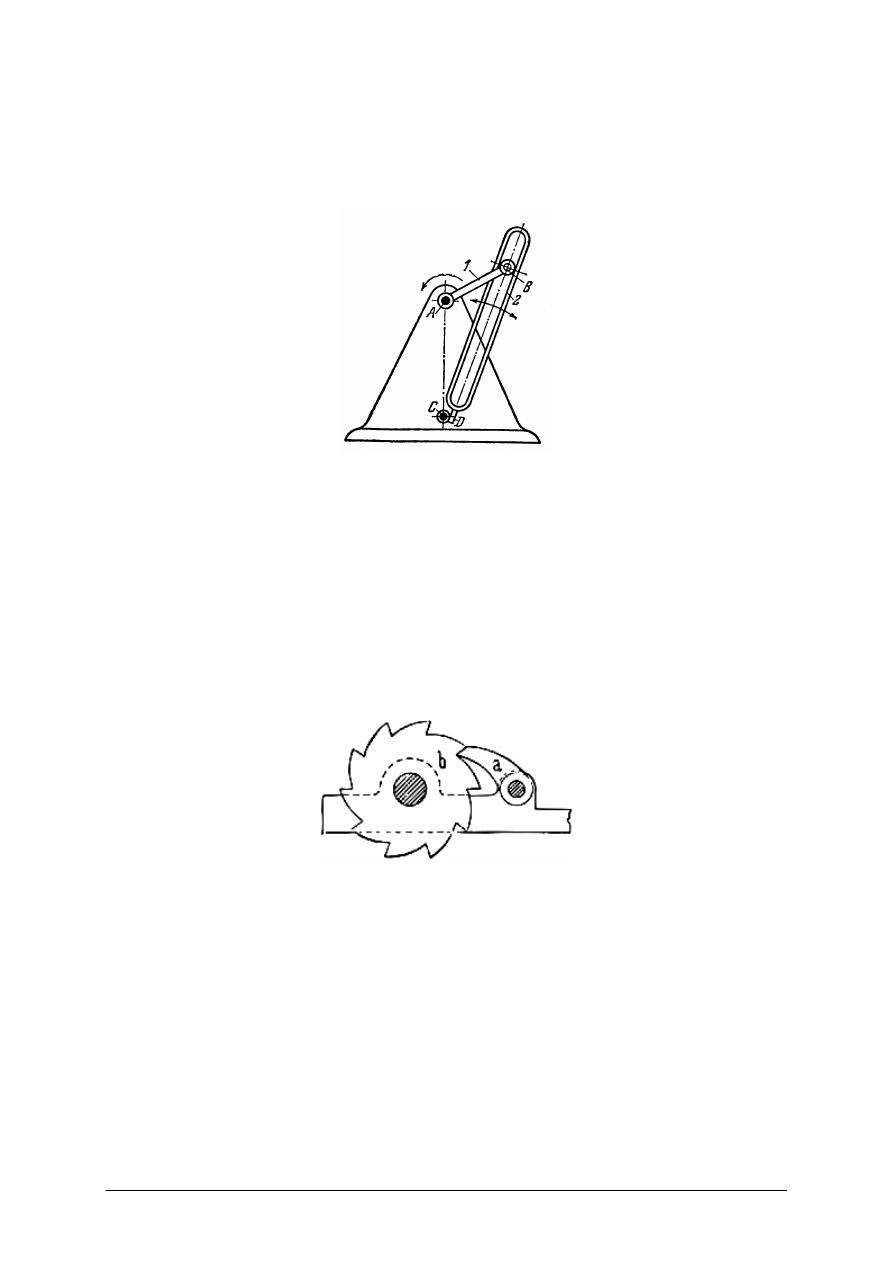
Mechanizmy dźwigniowe wieloprzegubowe są czworobokiem przegubowym pokazanych
schematycznie na rysunku 10, który składa się z podstawy 1 ostoi, z dwóch ramion 2 i 4 oraz
z łącznika 3 połączonych ze sobą przegubowo. Ramię 2 wykonując ruch obrotowy (pełny
obrót o 360
°
) nosi nazwę korby, ramię wykonujące tylko ruch wahadłowy 4 wahacz
natomiast dzwignia 3 łącząca oba ramiona nazywa się łącznikiem. Mechanizmy dźwigniowe
wyposażone w korbę noszą nazwę mechanizmów korbowych, a wyposażone w korbę
i wahacz, korbowo – wahaczowych.
Rys.10. Schemat mechanizmu dźwigniowego [www.].
Odmianą mechanizmu dźwigniowego, w którym wahacz zastąpiony został elementem
poruszający się wzdłuż ostoi tzw. wodzikiem, jest mechanizm korbowo-wodzikowy
przedstawiony na rysunku 11.
Rys.11. Mechanizmu korbowo-wodzikowy [www.].
Mechanizmy korbowo-wodzikowe znajdują szerokie zastosowanie jako układy zamiany
ruchu obrotowego na postępowo-zwrotny lub odwrotnie w maszynach szyjących (mechanizm
igielnicy) wycinarkach mechaniczny i wielu innych.
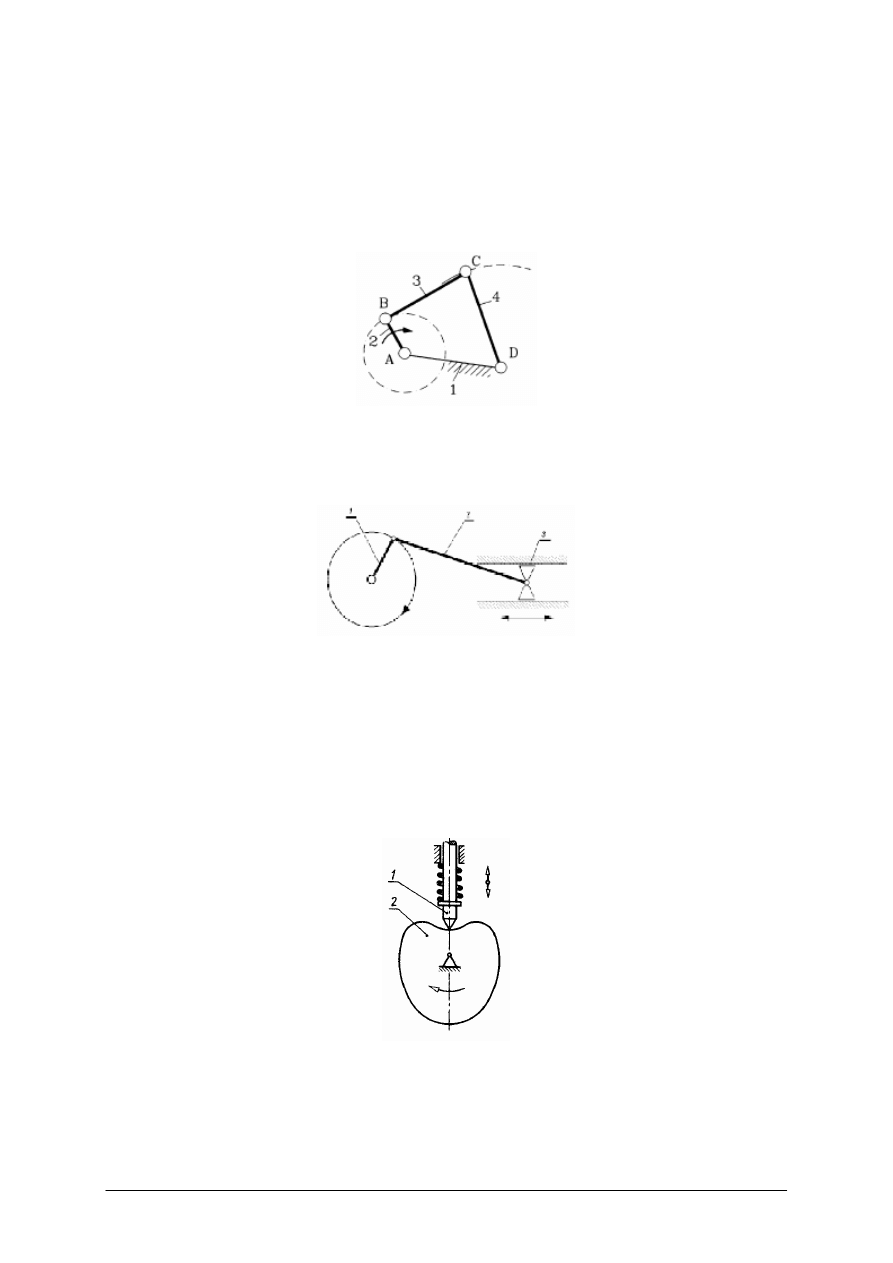
Mechanizm krzywkowy przedstawiony na rysunku 12 składa się z popychacza 1 oraz
krzywki 2. Popychacz wykonuje ruch nawrotny, natomiast krzywka wykonująca najczęściej
ruch ciągły, wyposażona jest w powierzchnię krzywą, z którą styka się popychacz i od
kształtu której uzależniony jest ruch względny popychacza.
Rys. 12. Mechanizm krzywkowy [4, s. 28].
W zależności od przeznaczenia popychacz może być zakończony ostrzem, talerzykiem
lub krążkiem. Mechanizm krzywkowy wykorzystywany jest do zamiany ruchu obrotowego
(lub postępowego) krzywki na ruch postępowy lub wahadłowy popychacza.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
20
Mechanizm jarzmowy przedstawiony na rysunku 13, służy do zamiany ruchu
obrotowego korby za pośrednictwem jarzma w prostoliniowo zwrotny ruch suwaka (niekiedy
na odwrót). Jarzmo wykonywane jest najczęściej w postaci pręta (prostego lub łukowego)
z wyciętą w nim prowadnicą, w której przemieszcza się element osadzony obrotowo na
czopie korby, zwany kamieniem.
Rys. 13. Schemat mechanizmu jarzmowego [www.].
Mechanizmy ruchu przerywanego
Mechanizmy ruchu przerywanego przeznaczone są do przekształcania ruchu obrotowego
na ruch okresowy (obrotowy przerywany). W maszynach obuwniczych najczęściej
wykorzystywane są mechanizmy zapadkowe i tzw. krzyż maltański.
Mechanizm zapadkowy pokazany na rysunku 14 jest urządzeniem ograniczającym ruch
w jednym kierunku. Mechanizm zbudowany jest z koła zębatego b lub zębatki
z niesymetrycznymi zębami i zapadki a uniemożliwiającej ruch w wybranym kierunku. Obrót
zębatki w jednym kierunku powoduje uniesienie zapadki a następnie spadek na kolejny ząb.
Rys. 14. Mechanizm zapadkowy ograniczający ruch w jednym kierunku [www.].
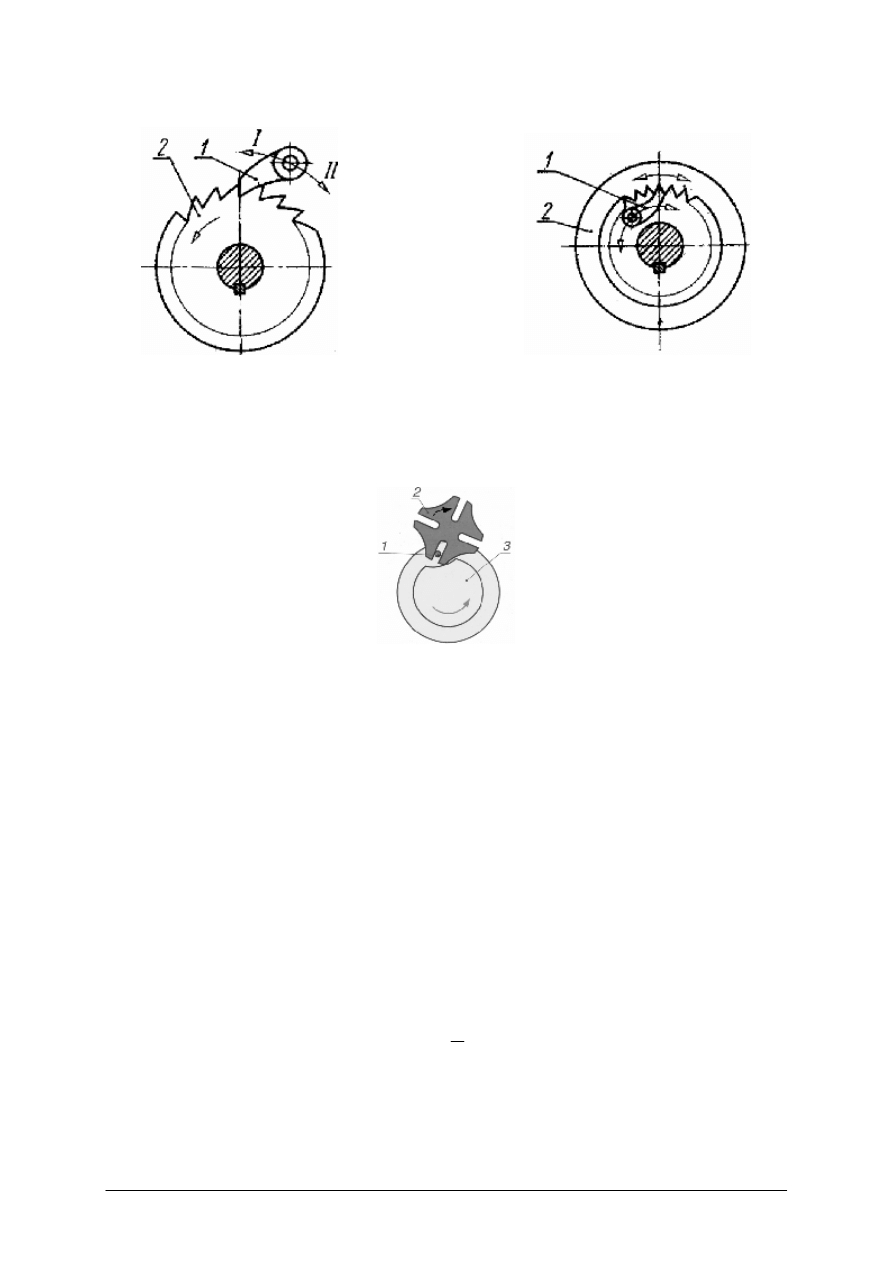
W przypadku mechanizmu zapadkowego z okresowym obrotem zapadki pokazanym na
rysunku 15, zapadka 1 wykonując ruch obrotowy w kierunku strzałki I zaczepia ząb koła
zapadkowego 2 powodując jego obrót o określoną wartość kąta. Podczas powrotnego ruchu
w kierunku strzałki II zapadka przeskakuje po zębach koła zapadkowego nie powodując jego
ruchu.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
21
a)
b)
Rys. 15. Mechanizm zapadkowy: a) zewnętrzny, b) wewnętrzny [4, s. 32].
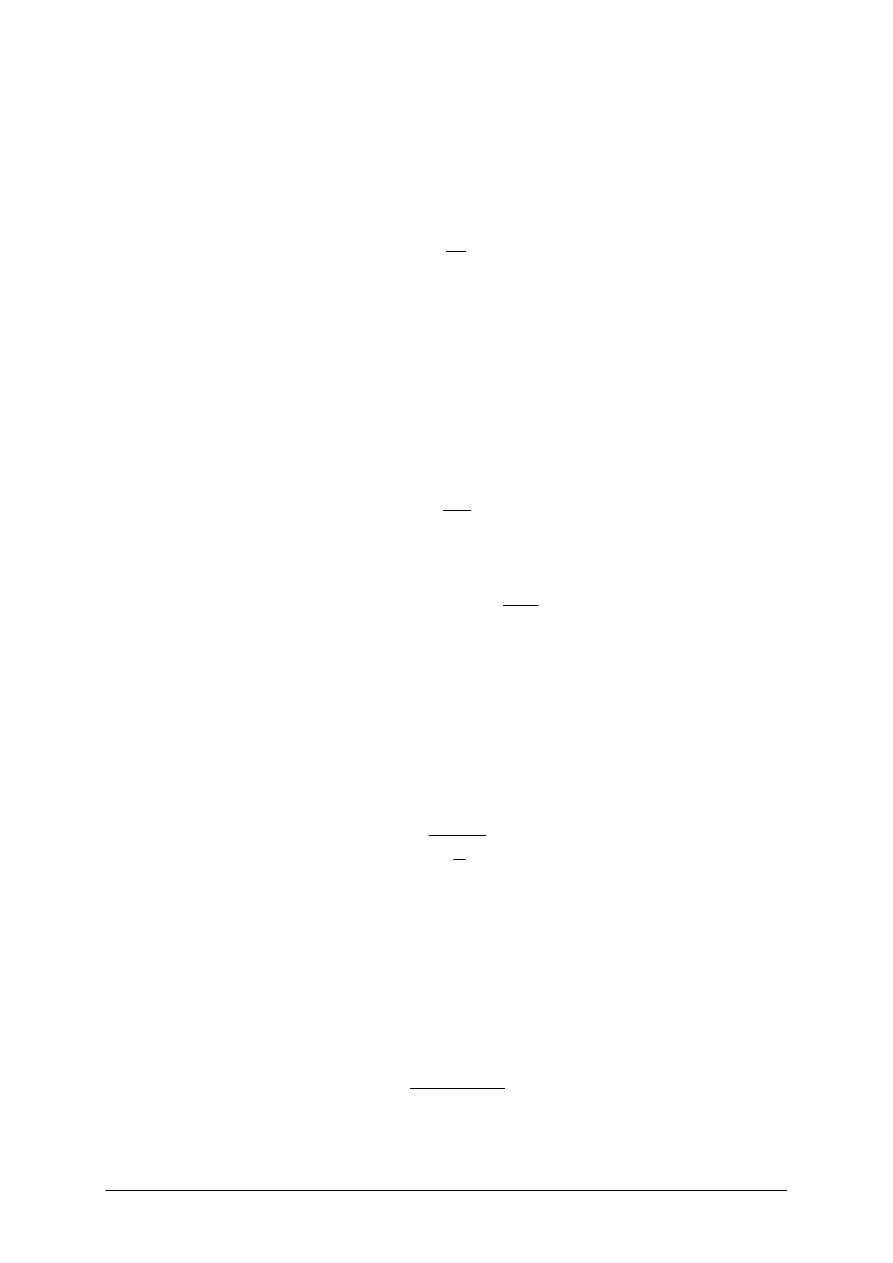
Mechanizm maltański nazywany również krzyżem maltańskim pokazany na rysunku 16
składa się zazwyczaj z krzyża 2 oraz tarczy 3 (korby) ze sworzniem zabierakowym 1.
Elementem napędowym jest korba, która z pośrednictwem sworznia, wykonując pełny obrót
przemieszcza krzyż o ściśle określony kąt.
Rys. 16. Mechanizm maltański: 1 – sworzeń zabierakowy, 2 – krzyż, 3 – tarcza (korba) [www.].
Obliczenia wytrzymałościowe części maszyn
Połączenia części maszyn dzieli się na nierozłączne, w których części złączone lub
łączniki (części łączące) ulegają uszkodzeniu przy rozłączeniu połączenia oraz rozłączne,
które można rozłączać i łączyć ponownie bez uszkodzenia części łączonych i łączników.
Najczęściej spotykanymi połączeniami nierozłącznymi są połączenia: spawane, lutowane,
zgrzewane, skurczowe, wtłaczane i nitowane, zaś do połączeń rozłącznych zaliczamy
połączenia: klinowe, wpustowe, wielowypustowe, sworzniowe, kołkowe, sprężyste i gwintowe.
Połączenia spawane
Spawanie polega na doprowadzeniu do nadtopienia powierzchni styku łączonych
materiałów i wprowadzenie dodatkowego stopionego materiału (spoiwa) w miejsce łączone.
W rozwiązaniach konstrukcyjnych części maszyn stosuje się najczęściej dwa rodzaje spoin tj.
spoiny czołowe i pachwinowe. Z uwagi na częstość ich występowania, metodyka obliczeń
wytrzymałościowych zostanie przedstawiona dla tych dwu rodzajów spoin.
Spoiny pachwinowe zawsze oblicza się na ścinanie w przekroju niebezpiecznym nawet,
jeśli występuje złożony stan naprężeń. Warunek wytrzymałościowy przybiera postać:
'
t
k
S
F ≤
=
τ
gdzie:
F – siła przypadająca na jeden szew połączenia [N],
S – przekrój spoiny [m
2
],
'
t
k – naprężenia dopuszczalne przy ścinaniu spoiny;
'
t
k =0,65 k
r
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
22
Przekrój S spoiny pachwinowej o długości l obliczamy z zależności S=l·a, gdzie grubość
spoiny a=h·cos45°
≈
07 h
Spoinę czołową obliczamy z warunku na rozciąganie, ściskanie ścinanie i zginanie.
W zależności od rodzaju obciążeń stosujemy następujące wzory:
−
dla obciążeń rozciągających, ścinających i ściskających
'
x
x
k
S
F ≤
=
τ
gdzie:
F
x
– odpowiednio F
r
, F
t
lub F
c
siła rozciągająca, ścinająca lub ściskająca spoinę
w zależności od panujących obciążeń [N],
S – przekrój spoiny [m
2
],
'
x
k – odpowiednio
'
r
k =0,9 k
r
,
'
t
k =0,65 k
r
,
'
c
k = k
r
naprężenia dopuszczalne przy
rozciąganiu, ścinaniu lub ściskaniu spoiny [MPa].
Przekrój S spoiny czołowej przyjmujemy równy przekrojowi cieńszemu z łączonych
elementów.
−
dla obciążeń zginających
'
g
x
g
k
W
M
≤
=
τ
gdzie:
M
g
– moment zginający spoinę [Nm],
W
x
– wskaźnik przekroju na zginanie;
6
a
l
W
2
x
⋅
=
[m
3
],
'
g
k – naprężenia dopuszczalne przy zginaniu;
'
g
k =0,9 k
r
Połączenia wpustowe i wielowypustowe
Połączenia te stosujemy w częściach maszyn przenoszących moment obrotowy z wału na
piastę elementu współpracującego (sprzęgła koła pasowe, zębate itd.)lub odwrotnie.
Obliczenia wytrzymałościowe połączeń wpustowych i wielowypustowych polegają na
sprawdzeniu połączenia na naciski powierzchniowe między bocznymi ścinani. Dla połączeń
wpustowych warunek wytrzymałościowy zapisujemy:
o
0
k
n
2
h
l
F
p
≤
⋅
⋅
=
gdzie:
F – siła obwodowa działająca na powierzchnię styku czopa i piasty [N],
h – głębokość rowka w czopie [m],
l
0
– czynna długość wpustu [m],
n – liczba wpustów,
k
o
– dopuszczalne naciski powierzchniowe [MPa].
Projektując połączenia wielowypustowe przyjmuje się, że tylko 75% wpustów przenosi
obciążenie. Dlatego obliczenia wykonuje się korzystając z wzoru:
o
0
k
n
h
l
75
,
0
F
p
≤
⋅
⋅
⋅
=
gdzie opisy oznaczeń jak dla połączeń wpustowych.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
23
Połączenia nitowe
Projektowanie połączeń nitowych sprowadza się do dobrania:
−
średnicy i liczby nitów,
−
wymiarów części nitowanych (pasów, blach, kształtowników),
−
wszystkich wymiarów projektowanego połączenia.
Nit pracujący w połączeniu jest narażony na ścinanie w płaszczyźnie prostopadłej do jego
średnicy oraz może ulec zniszczeniu jego powierzchnia boczna na skutek nacisków
powierzchniowych. Z tego powodu nity obliczamy:
−
na ścinanie
t
2
0
t
k
n
m
4
d
F
≤
⋅
⋅
⋅
Π
=
τ
−
na naciski powierzchniowe
o
0
k
d
g
n
F
p
≤
⋅
⋅
=
gdzie:
F – siła przenoszona przez połączenie nitowe [N],
d
0
– średnica otworu nitowego [m],
g – grubość łączonej blachy [m],
m – liczba ścinanych przekrojów w nicie,
n – liczba nitów w połączeniu,
k
t
– dopuszczalne naprężenia ścinające [MPa],
k
o
– dopuszczalne naciski powierzchniowe [MPa].
Oprócz obliczeń wytrzymałościowych nitów, elementy nitowane (płaskowniki, blachy,
kształtowniki) obliczamy najczęściej z warunku na rozciąganie, uwzględniając osłabienie
rozpatrywanego przekroju przez otwory nitowe
r
0
1
r
k
d
g
n
g
b
F
≤
⋅
⋅
−
⋅
=
σ
gdzie:
F – siła przenoszona przez elementy nitowane [N],
d
0
– średnica otworu nitowego [m],
b – szerokość płaskownika [m],
g – grubość łączonej blachy lub kształtownika [m],
n
1
– liczba nitów w połączeniu,
k
r
– dopuszczalne naprężenia rozciągające [MPa].
Połączenia gwintowe obciążone siłą poprzeczną
Sposób obliczeń połączeń śrubowych obciążonych siłami poprzecznymi uzależniony jest
od sposobu osadzenia śruby w otworze. W przypadku ciasnego pasowania śruby, narażona
jest ona na ścinanie, natomiast jeśli jest zmontowana z luzem w otworze, to istnieje
możliwość jej zginania pod wpływem sił poprzecznych.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
24
W zależności od sposobu wykonania połączenia śrubowego, obliczenia wykonujemy
według wzorów:
−
z warunku na ścinanie dla połączeń ze śrubami pasowanymi ciasno
t
k
n
S
Q ≤
⋅
=
τ
gdzie:
Q – obciążenie poprzeczne [N],
S – pole przekroju śruby [m],
n – liczba śrub przenoszących obciążenie,
k
t
– dopuszczalne naprężenia ścinające [MPa].
−
z warunku na zginanie dla połączeń ze śrubami pasowanymi luźno
r
r
k
n
S
i
k
Q
≤
⋅
µ
⋅
⋅
⋅
=
σ
gdzie:
Q – obciążenie poprzeczne [N],
S
r
– pole przekroju rdzenia śruby [m
2
],
k – współczynnik pewności, najczęściej k=0,4
÷
0,8,
i – liczba powierzchni styku,
µ
- współczynnik tarcia, najczęściej w zależności od materiału łączonego i śruby
oraz rodzaju powierzchni
µ
=0,06
÷
0,5,
n – liczba śrub przenoszących obciążenie,
k
r
– dopuszczalne naprężenia rozciągające [MPa].
W urządzeniach mechanicznych często możemy się spotkać z elementami śrubowymi
obciążonymi siłą osiową oraz siłą osiową i momentem skręcającym. Wiadomości niezbędne
do przeprowadzenia takich obliczeń nie są uwzględnione w programie nauczania dla tego
zawodu i dlatego nie będą omawiane. Dla uczniów zainteresowanych tą tematyką proponuje
się lekturę książek zamieszczonych w spisie literatury.
Osie i wały oraz ich łożyskowanie
Osiami nazywamy elementy ułożyskowane i służące do podtrzymania innych części
maszyn. Osie mogą pracować tylko na zginanie i nie są przewidziane do przenoszenia
momentu skręcającego.
Wałami nazywamy elementy służące do przenoszenia momentu obrotowego, momentu
zginającego oraz sił poprzecznych, dlatego są narażone na równoczesne skręcanie i zginanie.
Obliczenia wytrzymałościowe osi i wałów przeprowadzamy z uwzględnieniem
warunków wytrzymałościowych:
1. z warunku na zginanie obliczamy osie i wały
g
3
g
k
d
1
,
0
M
≤
=
σ
gdzie:
M
g
– maksymalny moment gnący [Nm],
d – średnica wału lub osi [m],
k
g
– naprężenia dopuszczalne przy zginaniu [MPa].
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
25
2. z warunku na skręcanie obliczamy tylko wały które przenoszą tylko moment
skręcający lub są na tyle krótkie, że moment gnący nie wpływa w znaczący sposób na ich
wytrzymałość
s
3
s
k
d
2
,
0
M
≤
=
τ
gdzie:
M
s
– maksymalny moment skręcający [Nm],
d – średnica wału [m],
k
s
– naprężenia dopuszczalne przy skręcaniu [MPa].
3. z warunku uwzględniającego jednoczesne zginanie i skręcanie obliczamy tylko wały
go
x
z
z
k
W
M ≤
=
σ
gdzie:
2
s
2
g
z
2
M
M
M
⋅
α
+
=
- moment zredukowany (zastępczy),
W
x
=0,1d
3
– wskaźnik wytrzymałości przekroju na zginanie (podany dla wału
pełnego).
Dobierając odpowiednie wskaźniki możemy wykonać obliczenia dla wałów drążonych.
Łożyska ślizgowe i toczne
Łożyskami nazywamy części maszyn służące do zapewnienia cieśle określonego
położenia osi i wałów względem nieruchomej podstawy (korpusu maszyny) oraz do
utrzymania stałego położenia osi obrotu wału.
Łożyska są obciążone siłami ciężaru wałów i osadzonych na nich elementów (koła
zębate, pasowe, sprzęgła itp.) oraz siłami pochodzącymi od obciążenia wałów i osi.
Obliczając wymiary łożyska ślizgowego poprzecznego o średnicy czopu d i długości l,
obciążonego siłą F postępujemy według schematu:
- obliczamy naciski powierzchniowe na powierzchni styku czopa i panwi
o
śr
k
l
d
F
p
≤
⋅
=
- wyznaczamy moment zginający działający na czop i obliczamy naprężenia zginające
2
l
F
M
g
⋅
=
go
3
g
k
d
l
F
5
≤
⋅
=
σ
- obliczamy współczynnik
λ
wiążący naciski powierzchniowe i naprężenia zginające
o
go
k
k
45
,
0
d
l
=
=
λ
- obliczamy średnicę otworu panwi oraz jej długość
o
k
F
d
⋅
λ
≥
l =
λ⋅
d
- sprawdzamy łożysko na rozgrzewanie
(
)
dop
śr
śr
v
p
v
p
⋅
≤
⋅
gdzie:
v – prędkość obwodowa wyliczana z
6000
n
d
v
⋅
⋅
π
=
[m/s] (dla d w cm, a n w obr/min),
v
p
śr
⋅
- umowna miara ciepła wytwarzanego w łożysku przez tarcie.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
26
W przypadku obliczania łożysk ślizgowych wzdłużnych korzystamy tylko z warunku na
naciski powierzchniowe i sprawdzamy je z warunku na rozgrzewanie.
Łożyska toczne są znormalizowane i ich dobór polega na ustaleniu typu łożyska oraz
jego wymiarów. Głównym zadaniem przy obliczaniu łożysk tocznych jest dobranie łożyska
spełniającego rzeczywiste warunki pracy i eksploatacji. Dobierając łożysko o nośności
C odpowiednio wyższej od rzeczywistego obciążenia łożyska, zapewniamy uzyskanie
odpowiedniej trwałości.
p
F
C
L
=
gdzie:
L – trwałość łożyska w mln obrotów,
C – nośność ruchowa łożyska podane w katalogach,
F – obciążenie zastępcze
P – wykładnik potęgowy; dla łożysk kulkowych p = 3, dla wałeczkowych p = 10/3
Sprzęgła i hamulce
Sprzęgłem nazywamy zespół układu napędowego maszyn służący do łączenia dwóch
wałów i przekazywania momentu obrotowego z wału czynnego (napędzającego) na wał
bierny(napędzany) bez zmiany kierunku ruchu obrotowego. Obliczanie sprzęgieł polega na
wyznaczeniu przenoszonego momentu obrotowego (równego momentowi skręcającemu)
i obliczeniu wymiarów łącznika (w sprzęgłach mechanicznych) lub na ustaleniu wymiarów
sprzęgła w zależności od rodzaju sił (np. tarcia). Podstawowym parametrem
charakteryzującym pracę sprzęgła jest wielkość przenoszonego momentu obrotowego, który
obliczamy ze wzory:
n
P
9550
M
=
[Nm]
dla mocy P podanej w kW i prędkości obrotowej podanej w obr/min. Następnie w zależności
od rodzaju sprzęgła obliczamy:
1. sprzęgła tulejowe kołkowe
- określamy maksymalną siłę działającą na jeden przekrój kołka
d
n
M
2
n
F
F
max
1
⋅
=
=
, gdzie
d jest średnicą wału a n liczbą przekrojów ścinanych kołków łączonych wał z tuleją.
- z warunku na ścinanie obliczamy średnicę kołków.
2. sprzęgła kołnierzowe
- dobieramy z norm,
- śruby łączące kołnierze liczymy z warunku na ścinanie (podobnie jak dla połączeń
śrubowych) uwzględniając, że śruby mogą być pasowane w kołnierzu ciasno lub luźno
osadzone w otworach.
3. sprzęgła cierne
- obliczamy moment tarcia jaki powinno przenieść sprzęgło (musi on być większy od
momentu obrotowego sprzęgła) ze wzoru M
T
= 0,5 F
w
⋅
D
p
⋅µ
, gdzie F
w
jest siłą włączającą
sprzęgło, D
m
jest średnią średnicą powierzchni ciernych natomiast
µ
jest współczynnikiem
tarcia którego wartość jest uzależniona od materiału tarcz ciernych,
- sprawdzamy powierzchnie cierne z warunku na naciski powierzchniowe,
- sprawdzeniu sprzęgła na rozgrzewanie (podobnie jak łożyska ślizgowe).
Hamulcem nazywamy urządzenie służące do zatrzymywania, zwalniania lub regulacji
prędkości obrotowej części maszyn. W praktyce przemysłowej spotykamy się najczęściej

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
27
z dwoma rodzajami hamulców: z hamulcami klockowymi i hamulcami cięgnowymi.
W obliczeniach hamulców klockowych wyznaczamy wartość momentu tarcia (podobnie jak
w przypadku sprzęgieł) i z warunku na naciski powierzchniowe obliczamy długość (mierzoną
po cięciwie łuku) klocka. Hamulce sprawdzamy na rozgrzewanie według tego samego wzoru,
co łożyska ślizgowe i sprzęgła cierne.
Hamulce cięgnowe w porównaniu z hamulcami klockowymi mają większą skuteczność
hamowania i dlatego stosowane są do regulacji prędkości wałów przenoszących duże
wartości momentu obrotowego. Hamulce te dzielimy na różnicowe i sumowe i obliczanie ich
polega na określeniu momentu tarcia potrzebnego do zahamowania bębna, wartości siły
w cięgnie oraz na wyznaczeniu wartości siły, jaką należy wywierać na dzwignię hamulca.
Przekładnie mechaniczne
Przekładnie
są
elementami
mechanizmów
napędowych,
pośredniczących
w przekazywaniu energii od silnika do maszyny roboczej, których zadaniem jest zmiana
prędkości obrotowej i/lub kierunku oraz wielkości przenoszonych sił i momentów.
Najczęściej dzielimy je na:
−
mechaniczne,
−
elektryczne,
−
hydrauliczne,
−
pneumatyczne
W zależności od rodzaju, przekładnie mechaniczne można podzielić na:
1. przekładnie cięgnowe rysunek 10 a
−
pasowa z pasem płaskim,
−
pasowa z pasem klinowym,
−
linowa,
−
łańcuchowa,
2. przekładnie cierne rysunek 10 b
3. przekładnie zębate rysunek 10 c
4. przekładnie ślimakowe rysunek 10 d
Wśród przekładni mechanicznych największe zastosowanie mają przekładnie zębate.
Do ich zalet należy:
−
możliwość przenoszenia dużych mocy sięgających 50 000kW (następny w kolejności
napęd łańcuchowy może przenosić ok. 5 000kW),
−
praca przy bardzo dużych prędkościach obwodowych (ok. 50m/s),
−
bardzo wysoka sprawność (około 99% dla jednego stopnia przełożenia), najwyższa wśród
wszystkich typów przekładni,
−
zwartość budowy,
−
stałość przełożenia przekładni (tą zaletę posiada jeszcze tylko przekładnia łańcuchowa);
w innych przekładniach występują poślizgi zmieniające przełożenie przekładni,
−
stosunkowo niski koszt (jest droższa od innych przekładni mechanicznych, ale jest
znacznie tańsza od innych typów przekładni).
Do wad przekładni zębatych można zaliczyć:
−
głośność,
−
generowanie drgań,
−
przenoszenie napędu na stosunkowo niewielką odległość.
Przekładnie mechaniczne mogą być:
−
redukujące (reduktory) zmniejszające obroty n
2
<
n
1
,
−
multiplikujące (multiplikatory) zwiększające obroty n
2
>
n
1
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
28
gdzie:
n
1
– prędkość obrotowa wału czynnego,
n
2
– prędkość obrotowa wału biernego,
dlatego
– przełożenie przekładni redukującej obliczamy wg
1
z
z
d
d
n
n
i
2
1
2
1
1
2
r
<
=
=
=
,
– przełożenie przekładni multiplikującej obliczamy wg
1
z
z
d
d
n
n
i
2
1
2
1
1
2
r
>
=
=
=
, z i d liczba
zębów i średnica odpowiednio koła czynnego i biernego.
Pompy są to maszyny robocze przeznaczone do podniesienia cieczy z poziomu niższego
na wyższy lub przetłoczenia cieczy z przestrzeni ssawnej o ciśnieniu niższym do przestrzeni
tłocznej o ciśnieniu wyższym. W przemyśle skórzanym pompy stosuje się w układach
hydraulicznych maszyn, dlatego bardzo często są łączone tematycznie z napędami
hydraulicznymi. Pompa otrzymuje energię mechaniczną od silnika napędowego i za
pośrednictwem elementu roboczego zamienia ją na energię cieczy. Działanie każdej pompy
polega na wytwarzaniu różnicy ciśnienia między ssawną i tłoczną stroną pompy. Zależnie od
sposobu wytwarzania różnicy ciśnień pompy dzielą się na pompy wyporowe i pompy wirowe.
Podstawowymi parametrami pracy pomp wyporowych są: wydajność, wysokość
podnoszenia lub przyrost ciśnienia, moment obrotowy i moc potrzebna do napędu pompy
oraz sprawność.
Pompy wyporowe to maszyny, w których element roboczy oddziela szczelnie przestrzeń
ssawną od przestrzeni tłocznej, co umożliwia wsteczny przepływ cieczy. Ze względu na ruch
elementu roboczego pompy wyporowe dzielą się na:
−
pompy wyporowe o postępowo-zwrotnym ruchu elementu roboczego (pompy tłokowe,
wielotłoczkowe, przeponowe),
−
pompy wyporowe o obrotowo-zwrotnym ruchu elementu roboczego (pompy
skrzydełkowe),
−
pompy wyporowe o obrotowym ruchu elementu roboczego (pompy zębate, łopatkowe,
krzywkowe, śrubowe, ślimakowe),
−
pompy wyporowe o obiegowym ruchu elementu roboczego (pompy puszkowe),
Pompy wyporowe mogą pracować pojedynczo lub w bateriach.
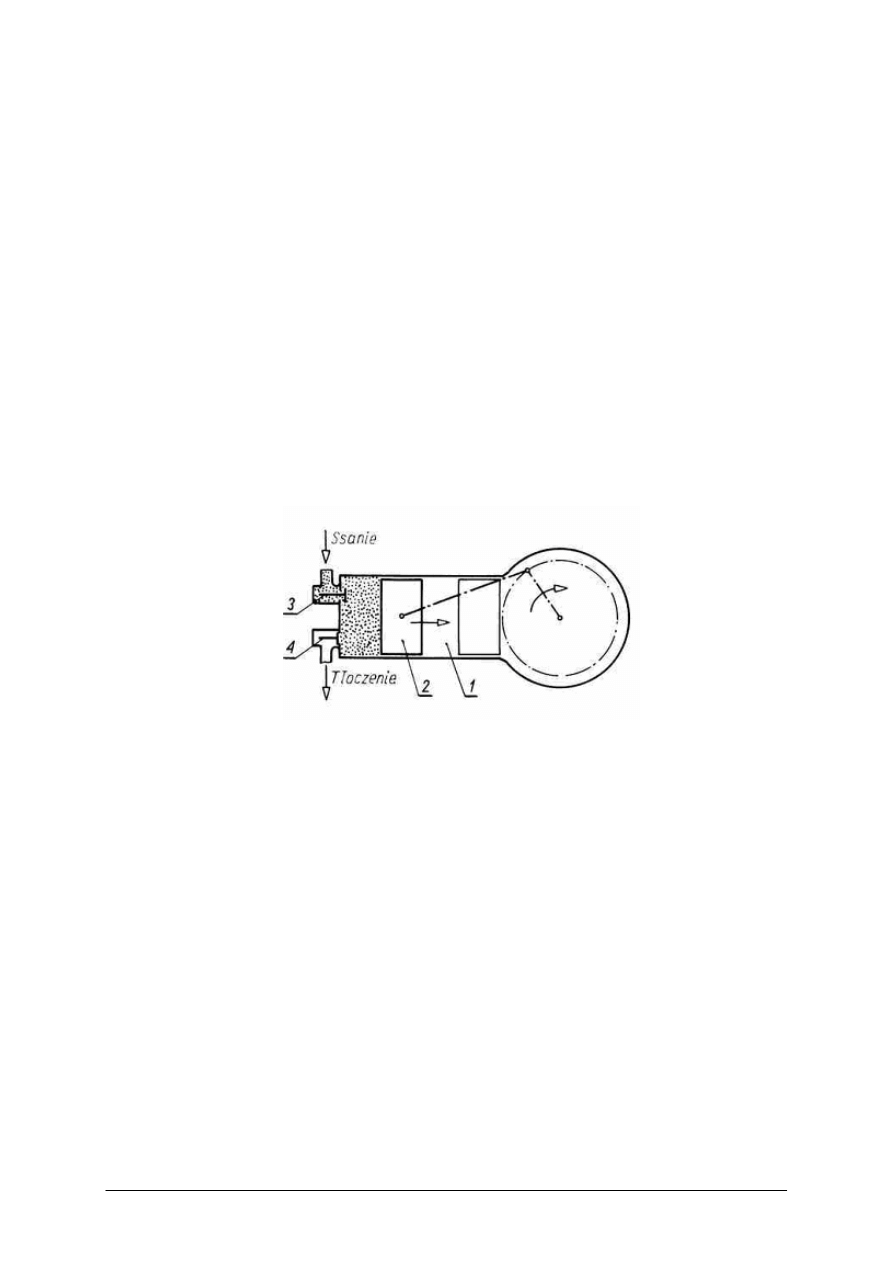
Pompy tłokowe mogą być jedno- lub wielotłokowe oraz zarówno jedno- jak
i dwustronnego działania. Budowę i zasadę działania pompy tłokowej jednostronnego
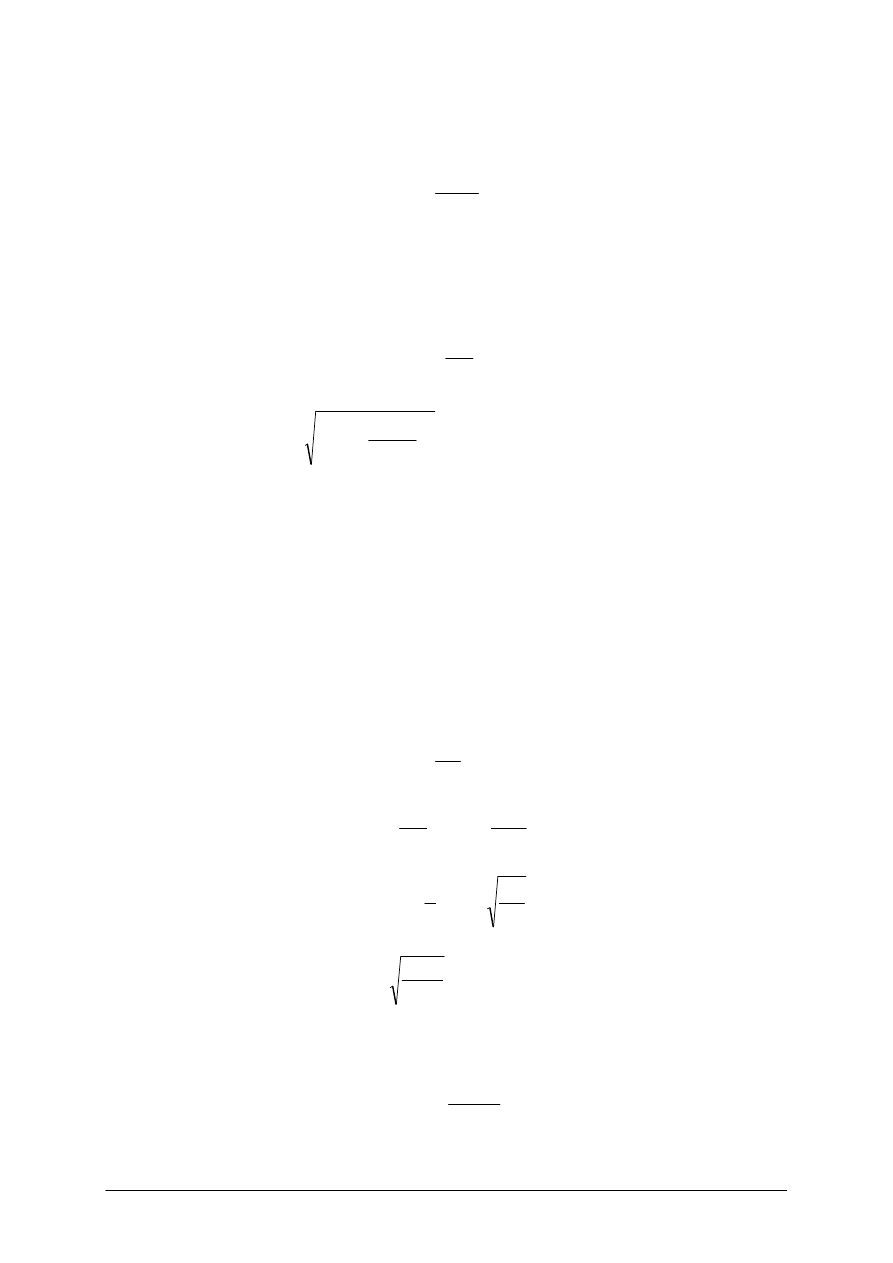
działania przedstawia rysunek 17.
Rys. 17. Pompa wyporowa tłokowa jednostronnego działania: 1 – cylinder,
2 – tłok, 3 – zawór ssawny, 4 – zawór tłoczny, 5 – rura ssawna, 6 – rura tłoczna,
7 – smok, 8 - zawór zwrotny[www.].
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
29
Tłok tarczowy 2 wykonujący ruch postępowo-zwrotny może być napędzany ręcznie, za
pomocą silnika elektrycznego lub spalinowego. Podczas przesuwania w położenie górne tłok
2 wywołuje podciśnienie w cylindrze 1, w wyniku czego otwiera się zawór ssawny 3 oraz
zawór zwrotny 8 i następuje zassanie cieczy do cylindra. Gdy tłok 2 przesuwa się w położenie
dolne pod wpływem nacisku cieczy następuje zamknięcie zaworów 3 i 8, a otwarcie zaworu
tłocznego 4 i następuje przepływ cieczy do zbiornika górnego. Przy ponownym przesunięciu
tłoka 2 w położenie górne zawór tłoczny 4 się zamyka i cykl się powtarza.
Odmianą konstrukcyjną pompy tłokowej jednostronnego działania jest pompa nurnikowa.
Pompy wyporowe jednostronnego działania (tłokowe, nurnikowe) pracują na zasadzie
dawkowania pompowanej cieczy. Bardziej równomierną pracę zapewniają pompy tłokowe
dwustronnego działania.
Pompy tłokowe i nurnikowe są stosowane w procesach uzdatniania wody w wodociągach
miejskich i oczyszczalniach ścieków, w melioracji do wypompowywania wód podskórnych,
przemyśle chemicznym do dozowania cieczy.
Pompy wielotłoczkowe wykonywane są jako pompy wielocylindrowe i o zmiennym
skoku tłoczków. Pompy te, ze względu na sposób działania i rozwiązanie konstrukcyjne,
dzielą się na pompy promieniowe i osiowe.
Pompy wielotłoczkowe są stosowane między innymi w napędach hydraulicznych.
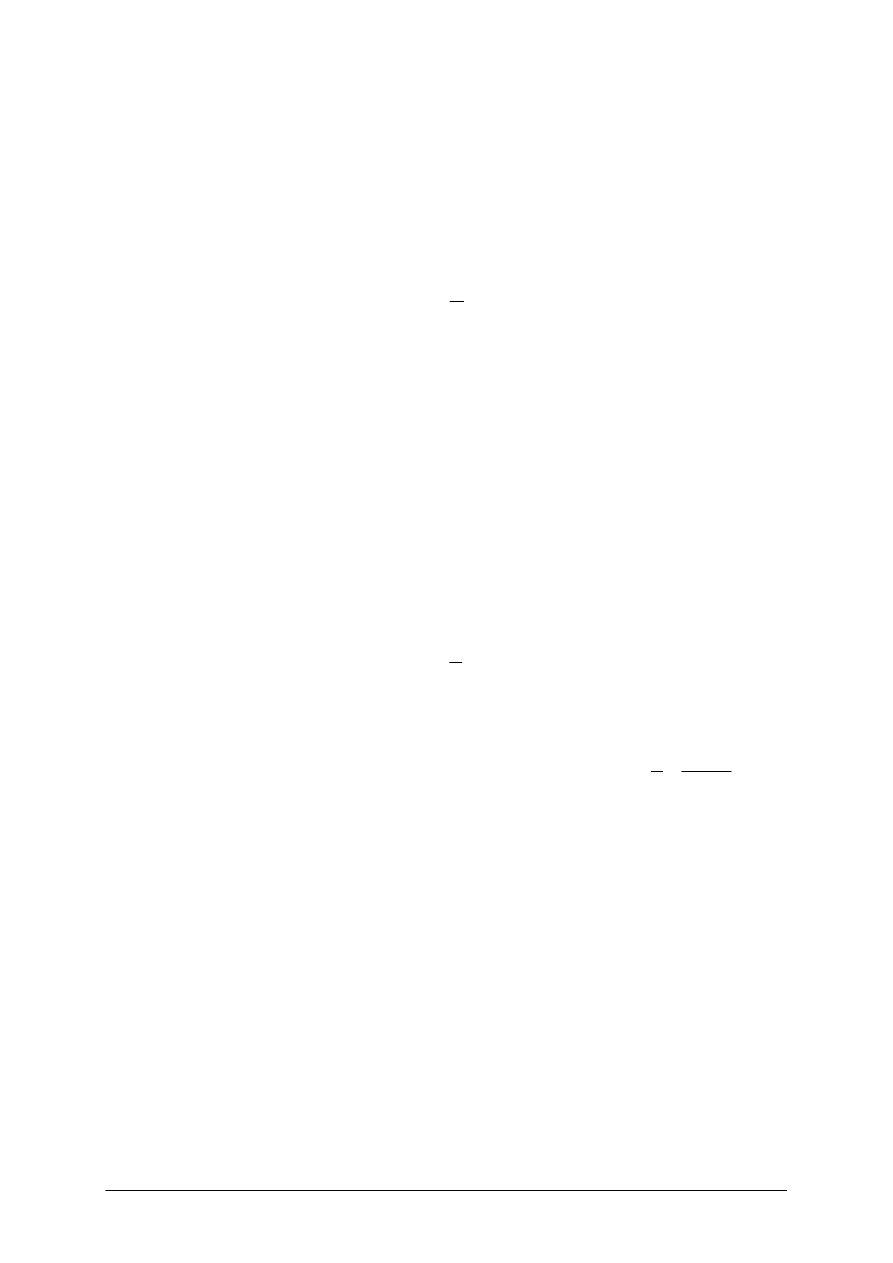
Pompy zębate charakteryzują się niezawodnością działania oraz możliwością uzyskania
dużych ciśnień czynnika roboczego. Dzielą się, w zależności od rodzaju zazębienia, na pompy
o zazębieniu zewnętrznym i pompy o zazębieniu wewnętrznym. W obu przypadkach koła
mogą mieć zęby proste, ukośne lub daszkowe. Schemat pompy zębatej o zazębieniu
zewnętrznym i wewnętrznym przedstawia rysunek 18.
a)
b)
Rys. 18. Schemat pompy zębatej a) o zazębieniu zewnętrznym: 1 – koło napędzające, 2 – koło napędzane,
3 – komora ssawna, 4 – komora tłoczna b) o zazębieniu wewnętrznym: 1 – koło napędzające,
2 – korpus, 3 – koło napędzane, 4 - przegroda[www.].
Pompy zębate ze względu na swą zwartą konstrukcję znalazły zastosowanie w napędach
hydraulicznych i układach smarowania. Cechują się dużą równomiernością pracy oraz długim
okresem eksploatacji.
Pompy łopatkowe posiadają element roboczy w postaci wysuwnych (promieniowo lub
ukośnie) łopatek.
Pompy łopatkowe ze względu na swą delikatną konstrukcję stosowane są wyłącznie do
pompowania czystych i samosmarujących cieczy, dlatego znalazły zastosowanie w napędach
hydraulicznych obrabiarek.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
30
Pompy wirowe należą do grupy maszyn wirnikowych. Ich zasada działania polega na
zwiększaniu krętu cieczy w wirniku (tj. organie roboczym) zaopatrzonym w łopatki
i obracającym się ze stałą prędkością obrotową. Ciecz stale przepływająca przez wirnik
podlega działaniu siły odśrodkowej lub działaniu siły wyporu łopatek, albo obu tych sił
łącznie. W ten sposób energia silnika jest przekazywana cieczy za pośrednictwem wirnika,
powodując w niej wzrost energii ciśnienia i energii kinetycznej. Po wyjściu cieczy z wirnika
następuje dalsza przemiana jej energii kinetycznej w energię ciśnienia. Przyrost energii
kinetycznej i ciśnienia w pompie jest zależny od konstrukcji wirnika i jego prędkości
obrotowej. W odróżnieniu od pomp wyporowych przyrost wysokości podnoszenia w pompie
wirowej jest zależny od wydajności.
W zależności od kierunku przepływu cieczy w wirniku pompy wirowe dzieli się na:
−
pompy promieniowe (odśrodkowe),
−
pompy osiowe (diagonalne i śrubowe),
−
pompy promieniowo-osiowe (helikoidalne).
Mogą to być pompy jednostopniowe – z jednym wirnikiem lub wielostopniowe –
z kilkoma wirnikami.
Pompy promieniowe posiadają element roboczy w postaci wirnika osadzonego na wale
sprzężonym z silnikiem napędowym. Z chwilą uruchomienia łopatki obracającego się wirnika
odrzucają cząsteczki cieczy ku obwodowi korpusu wskutek działania siły odśrodkowej.
Powoduje to powstanie różnicy, mniejszego ciśnienia w osi wirnika i większego na jego
obwodzie. Wytworzona różnica ciśnień umożliwia zassanie cieczy i jej wytłoczenie rurą
tłoczną. Warunkiem działania pompy jest wstępne zalanie jej cieczą, która wypełni rurę
ssawną i korpus pompy.
Pompy odśrodkowe są najczęściej stosowanymi pompami. Wydajności podnoszenia,
w zależności od wielkości wirnika leżą w zakresie od kilku centymetrów na minutę dla pomp
miniaturowych do 7000m
3
/h dla pomp stosowanych w instalacjach przemysłowych. Przy
zastosowaniu pomp wielostopniowych można uzyskać wysokości podnoszenia do kilku
kilometrów, co pozwala na zastosowanie takich pomp w instalacjach odwadniających
kopalnie. Pompy promieniowe wyposażone w wirniki gumowe mogą być także stosowane do
pompowania zawiesin, szlamów lub cieczy agresywnych.
Pompy osiowe - śrubowe posiadają element roboczy w postaci wirnika. Odpowiednio
ukształtowane łopatki wirnika wskutek ruchu obrotowego powodują podniesienie cieczy na
wymaganą wysokość. Kierownica znajdująca się za wirnikiem służy do kierunkowania strugi
cieczy. Pompy śmigłowe ze względu na niewielką wysokości podnoszenia przeważnie
poniżej 12m oraz bardzo wysokie wydajności dochodzące do 40000m3/h stosowane są
w instalacjach przemysłowych i energetycznych.
Pompy promieniowo-osiowe różnią się od pomp odśrodkowych nieco innym
ukształtowaniem korpusu i wirnika. Wirnik w kształcie stożka z łopatkami umożliwia
zasysanie cieczy wzdłuż osi wirnika, a następnie tłoczenie jej w spiralnym korpusie.
Pompy promieniowo-osiowe osiągają wysokości podnoszenia w zakresie 5 do 60m oraz
wysokie wydajności dochodzące do 14000m
3
/h. Są stosowane w instalacjach przemysłowych
lub odwadniających do pompowania cieczy czystych lub lekko zanieczyszczonych.
Sprężarki są to maszyny służące do sprężania powietrza i innych gazów, od niższego
ciśnienia ssania do wyższego ciśnienia tłoczenia. Sprężarki znalazły zastosowanie
w przemyśle skórzanym do napędu i sterowania układów pneumatycznych. W zależności od
zasady działania, sprężarki dzieli się na wyporowe i wirowe (przepływowe).
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
31
Sprężarki wyporowe dzieli się na:
−
tłokowe, o posuwisto-zwrotnym ruchu tłoka,
−
rotacyjne, o obrotowym ruchu organu roboczego.
Sprężarki wirowe (przepływowe) dzieli się na:
−
promieniowe, o promieniowym przepływie gazu.
−
osiowe, o osiowym przepływie gazu,
−
promieniowo-osiowe, o ukośnym przepływie gazu.
Sprężarki są szeroko stosowane zarówno w przemyśle (napęd różnego rodzaju narzędzi
–
kluczy pneumatycznych, szlifierek, wiertarek, młotów, piaskowanie, malowanie natryskowe,
dystrybucja gazów technicznych, pompowanie opon samochodowych, przetłaczanie gazu
ziemnego, podnoszenie ciśnienia w układach turbin gazowych, turbodoładowanie silnika
spalinowego) jak i w gospodarstwie domowym (chłodziarka, wentylator, i inne).
Sprężarki wyporowe
Sprężarki tłokowe są to urządzenia, w których zwiększanie ciśnienia gazu następuje
wskutek ruchu posuwistego tłoka w cylindrze. Należą zatem do grupy sprężarek
objętościowych. Działanie sprężarki tłokowej jest niemal identyczne jak pompy tłokowej.
Budowę, zasadę działania doskonałej sprężarki tłokowej przedstawia rysunek 19.
Rys. 19. Schemat i wykres pracy sprężarki jednostopniowej 1 – cylinder, 2 – tłok,
3 – zawór ssawny, 4 – zawór tłoczny [www. ].
Sprężarki rotacyjne są to urządzenia, w których zwiększanie ciśnienia gazu następuje
wskutek ruchu obrotowego organu roboczego. Buduje się je jako jedno- i dwustopniowe.
Budową i zasadą działania są bardzo zbliżone do pomp łopatkowych.
Odmianą konstrukcyjną sprężarek rotacyjnych są sprężarki z wirującymi tłokami, gdzie
zazębiające się tłoki tworzą zamknięte przestrzenie, które przemieszczając się od części
ssawnej do tłocznej sprężarki zmniejszają swoją objętość, powodując sprężanie gazu.
Ponadto w technice stosowane są także inne rozwiązania konstrukcyjne sprężarek
wyporowych, jak: sprężarki śrubowe, sprężarki spiralne.
Sprężarka promieniowe jest to sprężarka, w której przepływ gazu przez wirnik jest
promieniowy. Sprężarki promieniowe charakteryzują się wysoką sprawnością gdy pracują
przy parametrach nominalnych oraz posiadają wysoki stosunek sprężania π ≤ 3.
Sprężarka osiowa jest to sprężarka, w której przepływ gazu przez wirnik jest osiowy.
Sprężarki osiowe charakteryzują się wysoką sprawnością gdy pracują przy parametrach
nominalnych. Zdolne są osiągnąć wysokie natężenie przepływu przy stosunkowo małych
wymiarach poprzecznych. Wadą sprężarek osiowych jest stosunkowo niski stosunek
sprężania.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
32
Wentylator to maszyna przepływowa służąca do transportowania powietrza lub innych
gazów. Przepływ odbywa się z pomieszczeń do otoczenia lub odwrotnie, oraz przez
urządzenia technologiczne, za pośrednictwem przewodów wentylacyjnych. Przekazywanie
energii do pokonania oporów przepływu odbywa się w wirniku, podstawowej części
składowej wentylatora. Źródłem napędu wentylatora jest silnik elektryczny. Napęd może być
realizowany jako bezpośredni, pasowy lub sprzęgłowy. Wirnik wentylatora musi pracować
w obudowie spiralnej lub rurowej, zakończonej króćcami na ssaniu i tłoczeniu. Energia
mechaniczna doprowadzona do wentylatora zamieniona zostaje na przyrost ciśnienia
statycznego i dynamicznego, potrzebny do pokonania przepływowych strat ciśnienia gazu
w urządzeniach i przewodach. Przyrost ciśnienia statycznego gazu w wentylatorach jest
minimalny (nie przekracza 13kPa). Ze względu na cechy konstrukcyjne wentylatory dzielą się
na: osiowe i promieniowe.
Wentylatory osiowe dzieli się na:
−
śmigłowe,
−
normalne,
−
przeciwbieżne.
Wentylatory promieniowe dzieli się na:
−
normalne,
−
bębnowe,
−
poprzeczne.
Podstawowymi parametrami technicznymi wentylatorów są:
−
wydajność [m
3
/s],
−
wytworzone ciśnienie (spiętrzenie całkowite) [Pa],
−
sprawność [%].
Zasady użytkowania, konserwacji i napraw maszyn i urządzeń
Przydatność maszyn dla potrzeb człowieka, wynikająca z konieczności realizowania
celów, dla których została zaprojektowana nazywa się jakością eksploatacyjną. Jest to zbiór
istotnych cech określających stopień spełnienia wymagań odbiorcy (użytkownika).
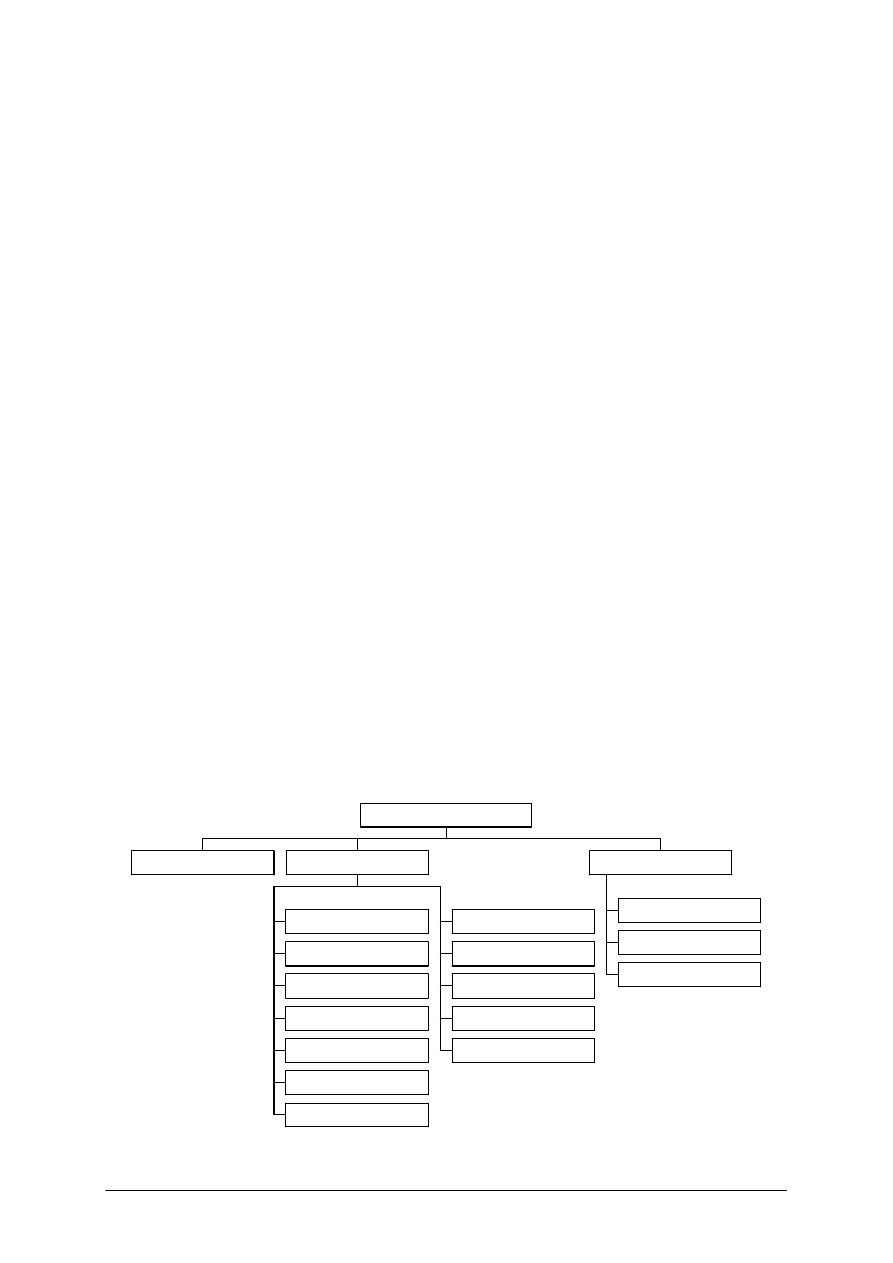
Najważniejsze kryteria oceny jakości eksploatacyjnej maszyn i urządzeń przedstawia rysunek 20.
PRZYDATNOŚĆ
Niezawodność
Podatność naprawcza
Podatność obsługowa
Trwałość
Nieuszkadzalność
Diagnozowalność
Bezpieczność
Jakość pracy
Wydajność
Przepustowość
Straty materiału
Czystość procesu
UŻYTECZNOŚĆ
Efektywność zastosowania
Koszty nabycia
Koszty eksploatacji
EKONOMICZNOŚĆ
JAKOŚĆ EKSPLOATACYJNA
Rys. 20. Kryteria oceny jakości eksploatacyjnej [5, s. 8].

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
33
Efektywne działanie maszyny jest uzależnione od jej niezawodności oraz od jakości
działań ludzi eksploatujących maszynę. Ocenę jakości maszyny określa się przez sprawdzenie
jej cech techniczno – użytkowych, do których zaliczamy: przeznaczenie, wielkości
charakterystyczne, wyposażenie, wydajność, dokładność, niezawodność, ergonomiczność
oraz bezpieczeństwo i higiena pracy.
Najważniejszą częścią procesu eksploatacji maszyn jest ich użytkowanie, ponieważ tylko
przez użytkowanie maszyn zaspokajane są potrzeby, dla których zostały one zaprojektowane
i wytworzone. Podczas pracy maszyna jest narażona na oddziaływanie różnych czynników
wymuszających. Są to:
– czynniki robocze, które oddziałują na maszynę w wyniku realizacji jej procesu roboczego,
– czynniki zewnętrzne, które oddziałują na maszynę bez względu na jej funkcjonowanie
(np. czynniki atmosferyczne),
– czynniki antropotechniczne, które oddziałują na maszynę w wyniku świadomej lub
nieświadomej działalności człowieka.
Praca maszyny wiąże się również z zużywaniem się jej części, co prowadzi do różnych
uszkodzeń, a w końcu może dojść do całkowitego zużycia maszyny.
W celu unikania awarii maszyny, należy użytkować ją zgodnie z przeznaczeniem oraz
przestrzegać zalecanych zasad użytkowania. Do najważniejszych czynności związanych
z prawidłowym użytkowaniem maszyny jest stosowanie instrukcji smarowania wszystkich
ruchomych mechanizmów i części. Konserwację należy prowadzić przestrzegając czasów
oraz rodzaju smaru (oleju) i sposobów smarowania uwzględniających specyfikę urządzenia.
W celu przywrócenia właściwości użytkowych, maszyny uszkodzone poddaje się
naprawom. W zakładach przemysłowych obowiązuje system planowo – zapobiegawczych
napraw, który zorganizowany jest zgodnie z wcześniej przygotowanymi instrukcjami
i normami. System planowo-zapobiegawczych napraw obejmuje całokształt czynności
związanych z należytym użytkowaniem, konserwacją, przeglądami technicznymi
i planowaniem oraz wykonywaniem napraw maszyn i urządzeń.
System ten przewiduje dokładne planowanie przeglądów i napraw oraz ustala ich zakres
oraz częstotliwość, co powoduje znaczne przedłużenie okresu eksploatacji maszyn i urządzeń.
Naprawy główne oraz średnie maszyn i urządzeń wykonuje się w wydziałach
naprawczych danego przedsiębiorstwa. Wydziały te muszą być wyposażone w odpowiednie
obrabiarki i urządzenia umożliwiające wykonanie napraw oraz muszą dysponować pełnym
asortymentem części zamiennych. Naprawy główne maszyn i urządzeń wykonuje się również
w specjalistycznych zakładach naprawczych.
Okres między dwiema naprawami głównymi lub czas zainstalowania nowej maszyny do
naprawy głównej, mierzony w godzinach pracy maszyny lub w kalendarzowych jednostkach
czasu, nazywa się cyklem naprawczym. W okresie tym, czyli między dwiema kolejnymi
naprawami głównymi, dokonuje się w ustalonej kolejności i odstępach czasu przeglądów oraz
napraw bieżących i średnich. Długość cyklu naprawczego i jego struktura, tzn. liczba, rodzaj
i kolejność przeglądów i napraw w czasie cyklu, zależą od tego, w jaki sposób występuje
nierównomierność zużywania się części.
4.2.2. Pytania sprawdzające
Odpowiadając na pytania sprawdzisz czy jesteś przygotowany do wykonania ćwiczeń.
1. Co to jest tolerancja wymiarów?
2. Jakie znasz rodzaje spoin i z jakich warunków wytrzymałościowych należy je obliczać?
3. Jakie naprężenia przenosi oś a jakie wał?
4. Czy tarcie jest zjawiskiem korzystnym w łożyskach?
5. Czy tarcie jest wykorzystywane podczas projektowania hamulców?

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
34
6. Co to jest przekładnia redukująca, podaj nazwę przekładni o przeciwnych właściwościach?
7. Jaka jest budowa i zasada działania sprężarki tłokowej?
8. Do jakiej grupy maszyn zalicza się wentylatory?
9. Jakie wyróżnia się rodzaje wentylatorów?
10. Co to jest jakość eksploatacyjna i podaj jej podział?
11. Wymień czynniki wymuszające na jakie jest narażona maszyna podczas pracy?
4.2.3. Ćwiczenia
Ćwiczenie 1
Dla podanego wymiaru tolerowanego liczbowo oblicz wartości wymiarów granicznych
i tolerancję wymiaru
028
,
0
015
,
0
6
,
15
+
−
.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z sposobami obliczeń wymiarów granicznych i tolerancji wymiaru,
2) wykonać obliczenia zgodnie z wymaganiami zadania,
3) sprawdzić poprawność wykonanych obliczeń,
4) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska:
−
przybory do pisania,
−
poradnik dla ucznia.
Ćwiczenie 2
Oblicz średnicę osi w przednim kole roweru, zakładając jej długość równą 15cm oraz że
ciężar twojego ciała rozkładany jest równo na oba koła. Materiał osi dobierz z tablic
wytrzymałościowych metali.
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) dobrać materiał osi z tabeli wytrzymałości materiałów,
2) obliczyć moment gnący z zależności M
g
= F
⋅
r/2,
3) wykonać obliczenia zgodnie z wymaganiami zadania,
4) sprawdzić poprawność wykonanych obliczeń,
5) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska:
−
przybory do pisania,
−
poradnik dla ucznia,
−
poradnik warsztatowca mechanika.
Ćwiczenie 3
Wskaż na schemacie dowolnej maszyny szyjącej, łańcuchy przekładni kinematycznych
oraz je nazwij. Określ, dla których przekładni tarcie jest procesem korzystnym, a dla których
szkodliwym.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
35
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie, powinieneś:
1) zapoznać się z treścią ćwiczenia,
2) przeanalizować mechanizmy przekładni w otrzymanym schemacie maszyny,
3) dopasować przekładnie do wskazanych mechanizmów,
4) określić wpływ tarcia na prawidłową pracę mechanizmu,
5) sprawdzić poprawność wykonanych obliczeń,
6) dokonać oceny poprawności wykonanego ćwiczenia.
Wyposażenie stanowiska:
−
schematy kinematyczne maszyn szyjących,
−
przybory do pisania,
−
poradnik dla ucznia
−
poradnik warsztatowca mechanika.
4.2.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) wyjaśnić istotę pasowania, tolerancji i chropowatości powierzchni?
o
o
2) obliczyć wymiary graniczne, tolerancje, luzy i wciski graniczne?
o
o
3) określić rodzaje najczęściej stosowanych spoin oraz omówić
metodykę ich obliczania?
o
o
4) określić warunki wytrzymałościowe używane do obliczeń połączeń
5) śrubowych pasowanych ciasno i luźno?
o
o
6) wymienić zasadę działania sprzęgła ciernego?
o
o
7) wymienić rodzaje i scharakteryzować zasadę działania pomp?
o
o
8) wyjaśnić budowę i zasadę działania sprężarki tłokowej?
o
o
9) dokonać podziału wentylatorów oraz podać ich podstawowe parametry
techniczne
o
o
10) wymienić cechy techniczno - użytkowe maszyny?
o
o
11) określić zasady prawidłowej konserwacji maszyny?
o
o
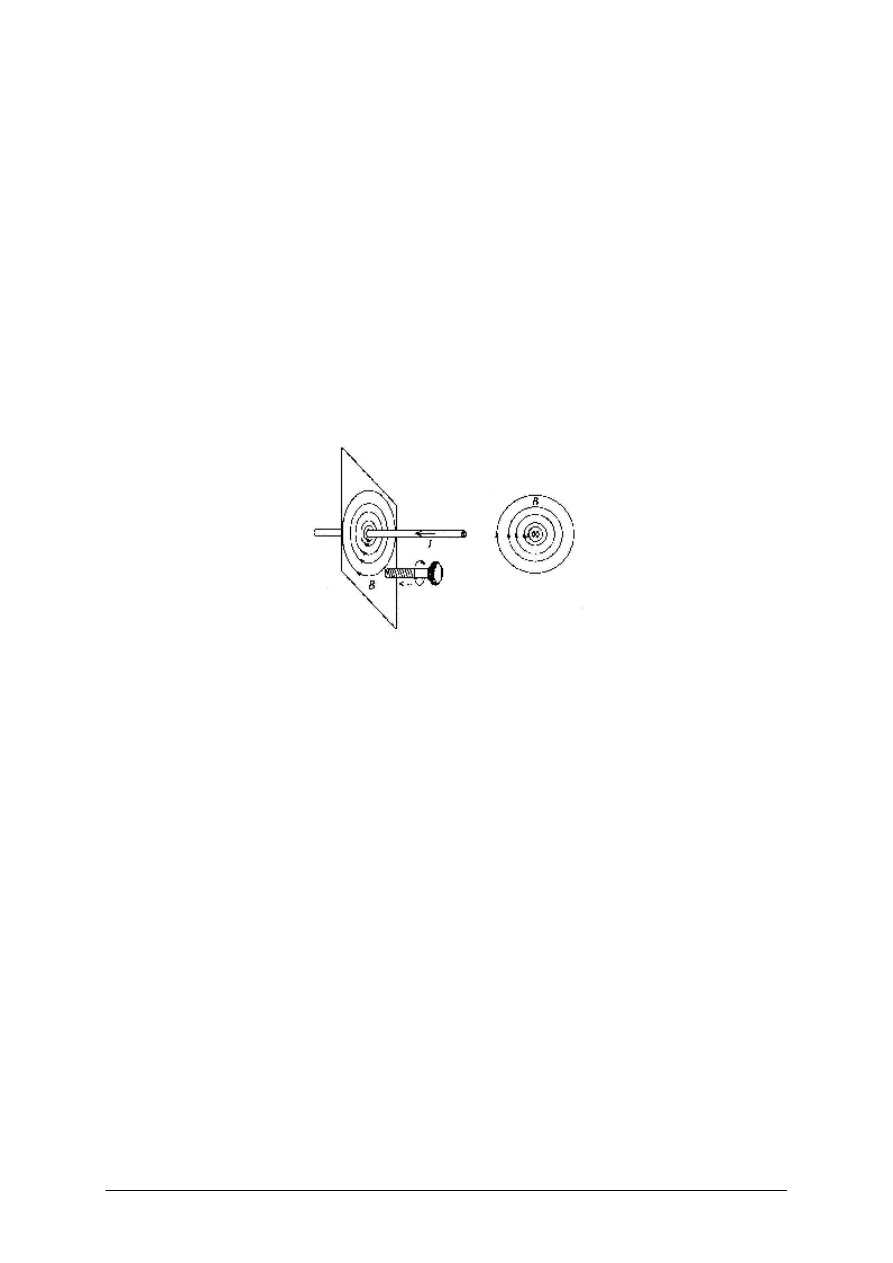
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
36
4.3. Podstawy elektrotechniki i automatyki przemysłowej
4.3.1. Materiał nauczania
Pole magnetyczne wytwarzane jest wokół przewodnika, przez który przepływa prąd
elektryczny. Pole to oddziałuję na inne pole magnetyczne, elektryczne lub na materiały
magnetyczne. Można przedstawić go graficznie w postaci symetrycznych okręgów, w środku
których umieszczony jest prostopadle przewodnik wytwarzający to pole (rysunek 21).
Kierunek linii pola magnetycznego wyznacza się za pomocą tzw. reguły śruby prawoskrętnej,
według której jeśli ruch postępowy śruby prawoskrętnej jest zgodny z kierunkiem prądu
płynącego przez przewodnik, to kierunek ruchu obrotowego tej śruby pokazuje kierunek linii
pola magnetycznego.
W praktyce oprócz przewodów prostoliniowych spotyka się przewody kołowe lub
przewody tworzące cewki, tzw. zwojnice stanowiące układ wielu przewodów kołowych.
Rys 21.Kierunek linii sił pola magnetycznego wokół przewodnika z prądem [6, s.29].
Natężenie pola magnetycznego wyraża się w henrach (H) i jest to stosunek indukcji
magnetycznej do przenikalności magnetycznej. Jest to wielkość wektorowa, kierunek wektora
jest zgodny z kierunkiem wektora indukcji magnetycznej. Jednostką jest 1 A/m.
Indukcja magnetyczna
Jeśli przewód umieszczony w zewnętrznym polu magnetycznym nie będzie zamocowany
sztywno (będzie przewodem swobodnym), to zacznie on poruszać się w kierunku zgodnym ze
zwrotem działającej na niego siły.
Długość przewodu oznacza się literą l (jest to długość tej części przewodu, którą
przecinają linie pola magnetycznego). Doświadczalnie stwierdzono, że siła działająca na
przewód wyraża się wzorem:
F = B I l
Wielkość B występująca we wzorze nazywa się indukcją magnetyczną, określa ona
gęstość linii pola magnetycznego. Im większa wartość B, tym większa siła działa na przewód
z prądem umieszczony w polu magnetycznym. Indukcja magnetyczna jest wielkością
wektorową, zwrot jej wektora jest zgodny ze zwrotem linii pola magnetycznego. Jednostką
indukcji jest tesla (T), która można zdefiniować następująco: pole magnetyczne ma w danym
punkcie indukcję B = 1 T, jeśli na przewodnik o długości l = 1 m, przez który płynie prąd
o natężeniu I = 1 A działa siła F = 1 N.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
37
Strumień magnetyczny jest to wielkość równa iloczynowi indukcji magnetycznej i pola
powierzchni, przez którą przechodzą linie pola magnetycznego. Jest to wielkość skalarna,
której jednostką jest weber (Wb). Strumień magnetyczny jest równy 1 Wb, jeżeli przez
powierzchnię 1 m
2
przechodzą prostopadle linie pola magnetycznego o indukcji równie 1 T.
Własności magnetyczne materiałów
We wszystkich materiałach znajdujących się w polu magnetycznym zachodzą dodatkowe
procesy wewnątrzcząsteczkowe, w wyniku których moment magnetyczny charakteryzujący
elektrony i związany z ich ruchem po orbicie powoduje ustawianie dipoli w poprzek kierunku
pola magnetycznego lub wzdłuż pola magnetycznego. W zależności od ustawienia się dipoli
może nastąpić wzmocnienie lub osłabienie pola magnetycznego.
Różne zachowanie się metali w polu magnetycznym związane jest z podatnością
magnetyczną
χ
, która wyraża ich zdolność do magnesowania się pod wpływem pola
magnetycznego o natężeniu H
Zależnie od podatności magnetycznej materiały dzielą się na trzy grupy:
−
materiały diamagnetyczne, w których własne pole magnetyczne (pochodzące od
znajdujących się w nim dipoli magnetycznych) osłabia zewnętrzne pole magnetyczne. Ich
przenikalność magnetyczna jest stała i mniejsza od jedności, należą do nich m.in. ołów,
miedź, bizmut, siarka , woda, chlor, srebro.
−
materiały paramagnetyczne, których własne pole magnetyczne jest zgodne ze zwrotem
pola zewnętrznego. Ich przenikalność magnetyczna jest stała i większa od jedności, należą
do nich m.in. powietrze, aluminium, platyna, magnez, cyna, mangan.
−
materiały ferromagnetyczne ,w których pod wpływem pola magnetycznego następuje
znaczny wzrost indukcji. Po zaniku pola zewnętrznego utrzymuje się w nich tzw.
magnetyzm szczątkowy. Ich przenikalność magnetyczna jest duża i zmienia się wraz ze
zmianą natężenia pola magnetycznego H. Należą do nich m.in. żelazo, stal, nikiel, kobalt,
żeliwo i niektóre stopy metali.
Elektromagnesy są zwojnicami (cewki), wewnątrz których umieszczony jest rdzeń
magnetyczny. Przepływający prąd elektryczny przez cewkę wytwarza pole magnetyczne
wzmacniane przez rdzeń, który wykonuje się zazwyczaj z materiałów ferromagnetycznych
miękkich. Dzięki temu po odłączeniu zasilania uzwojenie elektromagnesu, zanika pole
magnetyczne wytworzone przez uzwojenie i elektromagnes praktycznie traci swoje
właściwości magnetyczne. Ta cecha elektromagnesów oraz możliwość uzyskania dużych sił
przyciągania sprawia, że stosuje się je w praktyce znacznie częściej niż magnesy trwałe,
szczególnie tam, gdzie celowe jest sterowanie wartością siły przyciągania. Wykorzystuje się
je między innymi jako elektromagnesy chwytnikowe do urządzeń dźwigowych do transportu
złomu żelaznego, blachy i innych wyrobów ze stali lub żeliwa.
Zjawisko indukcji elektromagnetycznej jest podstawowym prawem, na których oparta
jest elektrotechnika i elektronika. Zjawisko to zostało odkryte i sformułowane przez M.
Faradaya w 1831 roku. Istotę zjawiska indukcji elektromagnetycznej pokazuje rysunek 22.
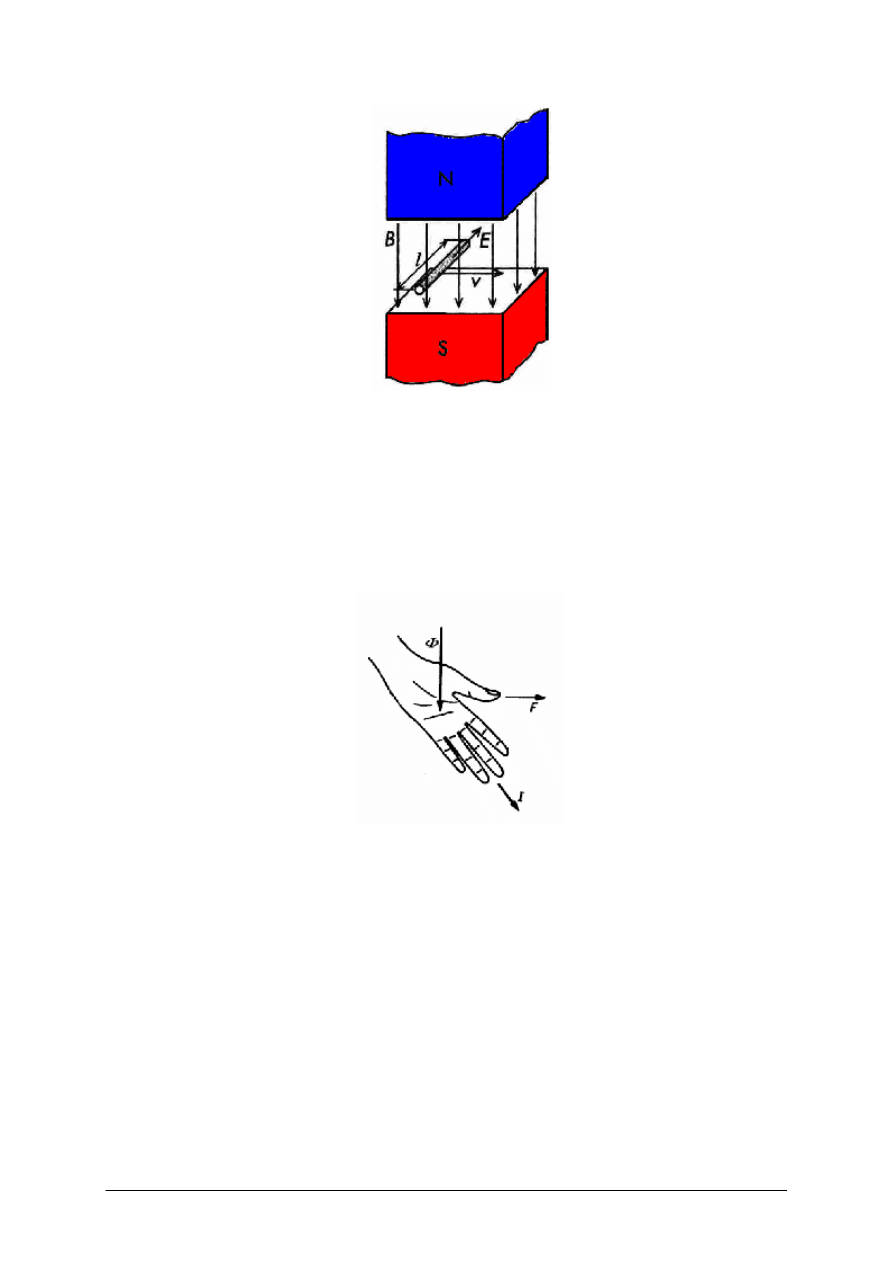
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
38
Rys. 22. Ilustracja zjawiska indukcji elektromagnetycznej- ruchomy przewodnik w polu magnetycznym [www.].
Prostoliniowy przewód o długości l porusza się w polu magnetycznym o indukcji B
z prędkością v w kierunku prostopadłym do linii indukcji. Wówczas w tym przewodzie
indukuje się siła elektromotoryczna wyrażająca się wzorem
E = B l v.
Zwrot indukowanej siły elektromotorycznej określa reguła lewej dłoni zilustrowana na
rysunku 23.
Rys. 23. Graficzna interpretacja reguły lewej dłoni [5, s.30].
Indukowanie się siły elektromotorycznej w uzwojeniu ma miejsce również wtedy, gdy
strumień skojarzony z uzwojeniem zmienia się w czasie.
Prąd elektryczny nazywamy przemiennym, jeśli zmienia się w czasie jego wartość
liczbowa przy niezmiennym zwrocie, lub zmienia się zwrot przy niezmiennej wartości, lub
zmienia się zarówno zwrot, jak i wartość liczbowa.
W przypadku przepływu prądu przemiennego przez rezystor, napięcie i natężenie prądu
początkowo narastają od zera do wartości maksymalnej a następnie opadają do zera, po czym
napięcie zmienia swoją biegunowość, a prąd kierunek przepływu. Od tej chwili natężenie
i napięcie ponownie wzrastają, jednak prąd płynie w przeciwnym niż poprzednio kierunku. Po
osiągnięciu wartości maksymalnej ponownie napięcie i natężenie maleją do zera i zjawisko
powtarza się od nowa.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
39
W obwodzie prądu przemiennego przepływowi przez rezystor prądu elektrycznego
towarzyszy wydzielanie się ciepła. O tym, ile ciepła powstanie decyduje moc czynna P, którą
dla rezystora o rezystancji R oblicza się ze wzoru:
P = R I
2
Jednostką mocy jest wat [W].
W przypadku przepływu prądu elektrycznego przez cewkę lub kondensator energia
elektryczną z obwodu, zamieniają na energię pola elektrycznego (kondensatory) lub
magnetycznego (cewki), a następnie zwracają ją z powrotem do obwodu. Miarą wymiany
energii między kondensatorem lub cewką w obwodzie prądu przemiennego jest tzw. moc
bierna, oznaczana literą Q.
Jednostką mocy biernej jest var [var]. W praktyce w obwodach prądu przemiennego
mamy do czynienia z odbiornikami składającymi się z elementów rezystancyjnych,
pojemnościowych i indukcyjnych. Każdy z nich charakteryzuje się tzw. impedancją (na którą
składa się rezystancja oraz reaktancja o charakterze pojemnościowym bądź indukcyjnym)
i przesunięciem fazowym między prądem a napięciem. Dla takiego odbiornika określa się
zarówno moc czynną jak i bierną.
Moc czynna stanowi iloczyn wartości skutecznych napięcia i prądu oraz kosinusa kąta
przesunięcia fazowego między przebiegami prądu i napięcia. Wyraża się ona wzorem:
P = U I cosφ
Moc bierna stanowi iloczyn wartości skutecznych napięcia i prądu oraz sinusa kąta
przesunięcia fazowego między przebiegami prądu i napięcia. Wyraża się ona wzorem:
Q = U·I·sinφ
Moc pozorna stanowi iloczyn wartości skutecznych napięcia i prądu, a jej jednostką jest
woltoamper [V A]. Wyraża się ona wzorem:
S = U·I
Prąd trójfazowy
Układem trójfazowym nazywa się zbiór obwodów elektrycznych, w których działają
napięcia źródłowe sinusoidalnie zmienne jednakowej częstotliwości, przesunięte względem
siebie o kąt 120 º w fazie i wytwarzane w jednym źródle energii, zwanym prądnicą lub
generatorem wielofazowym, przy czym rozróżnia się układy czteroprzewodowe
i trójprzewodowe.
W układzie czteroprzewodowym przez przewód łączący wspólne punkty źródła
i odbiorników płynie prąd wypadkowy, którego wartość chwilowa jest sumą algebraiczną
wartości chwilowych prądów płynących przez pozostałe przewody układu. Przewód, przez
który płynie prąd wypadkowy nazywamy przewodem neutralnym N (zerowym), zaś pozostałe
przewody przewodami fazowymi i oznacza się je: L1, L2, L3. Przewody fazowe i neutralny
nazywa się przewodami roboczymi, a punkt wspólny łączący końce uzwojeń źródła nazywa
się punktem neutralnym N (zerowym) układu zasilającego. Trójfazowe źródło lub odbiornik
energii elektrycznej może być połączone w trójkąt lub gwiazdę.
Prąd płynący w przewodzie fazowym nazywa się prądem przewodowym i oznacza
jednym indeksem: I
u
, I
v
, I
w
. Zwrot prądów przewodowych przyjmuje się umownie: od źródła
do odbiornika. W układzie trójkątowym prąd płynący w fazie źródła lub odbiornika nazywa
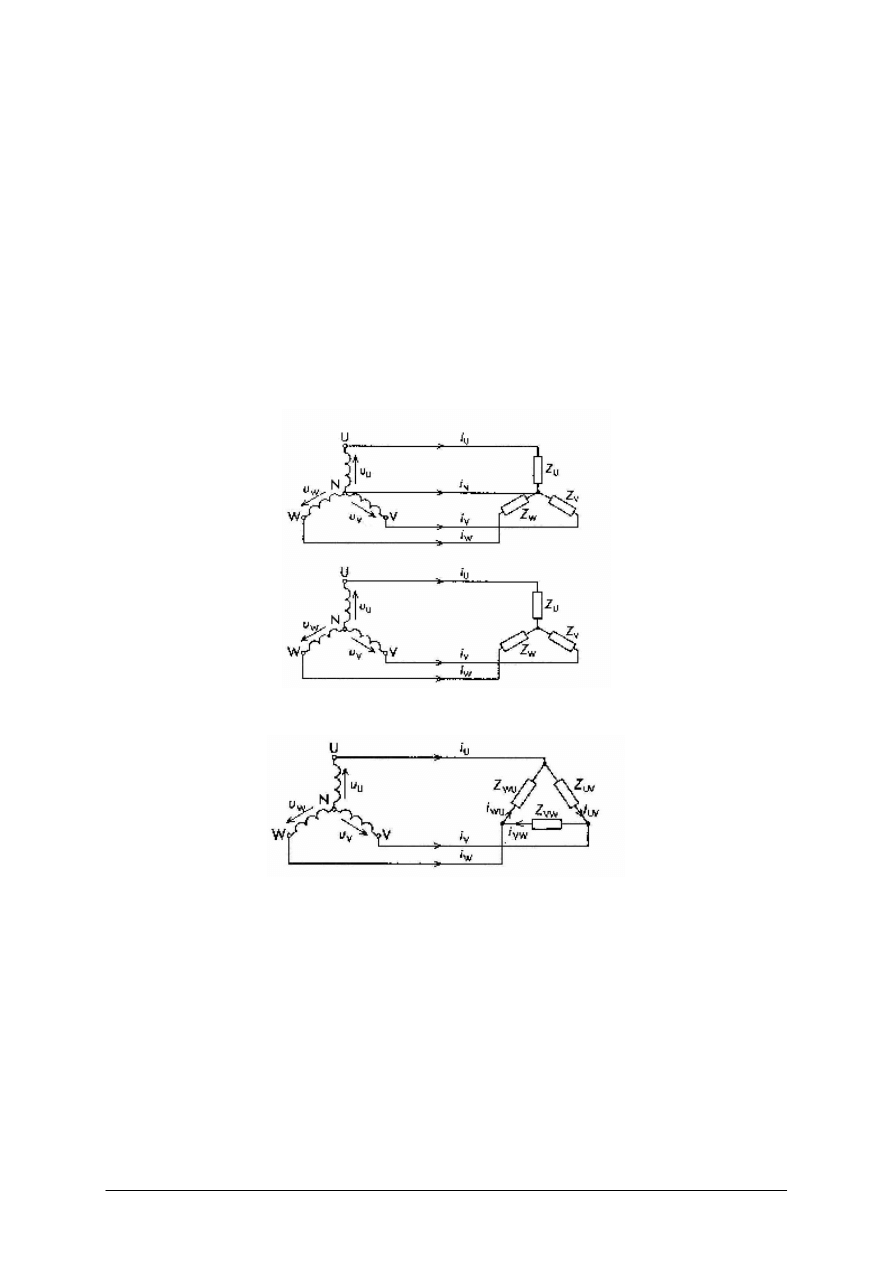
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
40
się prądem fazowym. Prądy fazowe opatruje się dwoma indeksami: I
uv
, I
vw
, I
wu
. Napięcia w
układach trójfazowych nazywamy fazowymi U
f
i oznaczamy: U
u
, U
v
, U
w
oraz
międzyfazowymi U: U
uv
, U
vw
, U
wu
. Układ połączenia w gwiazdę pokazano na rysunku 24
natomiast w trójkąt na rysunku 25.
Odmiana pierwsza to układ czteroprzewodowy z przewodem neutralnym, druga zaś to
układ trójprzewodowy – z trzema przewodami fazowymi, bez przewodu neutralnego. Układ
czteroprzewodowy stosowany jest w sieciach niskiego napięcia, pozwalając na wykorzystanie
napięcia zarówno międzyfazowego 380 V między poszczególnymi przewodami fazowymi,
jak i napięcia fazowego 220 V między każdym z trzech przewodów fazowych a przewodem
neutralnym. Odbiorniki trójfazowe połączone w gwiazdę powinny być włączane tylko do
trzech przewodów fazowych. Odbiorniki jednofazowe powinny być włączane pomiędzy jeden
z przewodów fazowych a przewód neutralny. Przewód neutralny pełni bardzo ważną funkcję
polegającą na wyrównywaniu napięć na odbiornikach, gdy wystąpi nierównomierne
obciążenie poszczególnych faz.
Rys.24.Układy trójfazowe prądu przemiennego połączone w gwiazdę
(czteroprzewodowy i trójprzewodowy) [5, s.57].
Rys.25.Układy trójfazowe prądu przemiennego połączone w trójkąt.[5, s.57].
Drugim rodzajem połączeń układu trójfazowego jest połączenie w trójkąt. W tym
przypadku odbiornik łączy się z siecią zasilającą trzema przewodami. Napięcie międzyfazowe
jest wówczas równe napięciu fazowemu, czyli napięciu występującemu na uzwojeniu jednej
fazy.
Budowa i zasada działania silnika prądu stałego i przemiennego oraz transformatora
Maszynami elektrycznymi nazywamy urządzenia, w których zachodzi zamiana energii
elektrycznej za pośrednictwem pola magnetycznego i prądu elektrycznego płynącego w ich
uzwojeniach na energię mechaniczną lub na odwrót. Ze względu na rodzaj przemiany energii
rozróżnia się trzy rodzaje maszyn elektrycznych:
−
prądnice, w których energia mechaniczna jest przekształcana na energię elektryczną,
−
silniki, w których energia elektryczna zamieniana jest na energię mechaniczną,
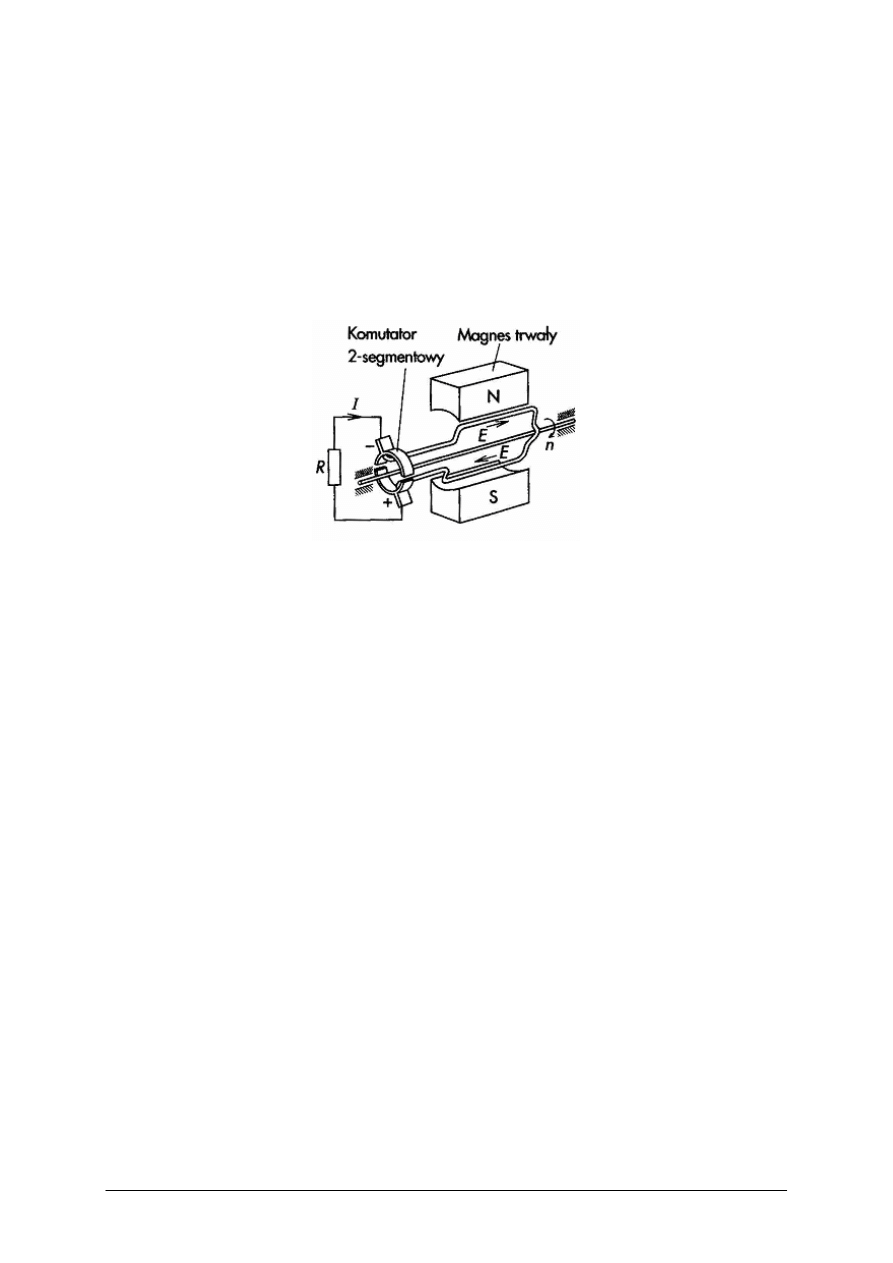
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
41
−
transformatory, w których energia elektryczna prądu przemiennego przekształca się
w energię elektryczną prądu przemiennego o innych parametrach, przy niezmienionej
częstotliwości. W praktyce oznacza to, że transformator służy do podwyższania lub
obniżania napięcia.
Budowa i zasada działania prądnicy prądu jednofazowego
Źródłami napięcia sinusoidalnie zmiennego są prądnice. Najprostszym przykładem
prądnicy jest zwój w postaci ramki, wirujący ze stałą prędkością kątową w polu
magnetycznym równomiernym o indukcji stałej w czasie. Uproszczony model takiej prądnicy
przedstawia rys 26.
Rys.26. Uproszczony model prądnicy prądu jednofazowego[6, s.76].
Zmiana położenia ramki względem nieruchomych biegunów magnesów trwałych
powoduje zmianę strumienia magnetycznego przenikającego powierzchnię ramki, co
powoduje generowania prądu elektrycznego w podłączonym odbiorniku. W prądnicy
rzeczywistej mamy nie jeden zwój, lecz N zwojów.
Prądnica prądu trójfazowego
Do wytwarzania napięć w układzie trójfazowym służą prądnice (generatory) trójfazowe.
Składa się ze statora (stojana), w którym umieszczone są uzwojenia i rotora (wirnika), który
wiruje ze stałą prędkością kątową. Zasada działania takiej prądnicy polega na przecinaniu
trzech, przesuniętych przestrzennie o kąt 120º uzwojeń stojana przez stały strumień
magnetyczny wytworzony w wirniku. Uzwojenia poszczególnych faz są wykonane
w jednakowy sposób. W każdym uzwojeniu indukuje się napięcie źródłowe sinusoidalne,
przy czym ze względu na symetrię układu i przesunięcie przestrzenne uzwojeń o ten sam kąt,
w fazach indukują się napięcia o jednakowej częstotliwości, jednakowych amplitudach
i przesunięte względem siebie o 1/3 okresu.
Budowa i zasada działania silnika prądu stałego
Silnik elektryczny prądu stałego zbudowany jest z dwóch magnesów zwróconych do
siebie biegunami różnoimiennymi, w taki sposób, aby pomiędzy nimi było pole magnetyczne.
Pomiędzy magnesami znajduje się przewód w kształcie ramki podłączony do źródła prądu
poprzez komutator i ślizgające się po nim szczotki. Przepływający przez przewód prąd
elektryczny generuje pole magnetyczne oddziaływujące na pole magnetyczne pochodzące od
magnesów trwałych wytwarzając w ten sposób moment obrotowy. Ramka wychyla się
z położenia poziomego, obracając się wokół osi. W wyniku swojej bezwładności mija
położenie pionowe, (w którym moment obrotowy jest równy zero, a szczotki nie zasilają
ramki). Po przejściu położenia pionowego ramki, szczotki znów dotykają styków na
komutatorze, ale odwrotnie, prąd płynie w przeciwnym kierunku, dzięki czemu ramka
w dalszym ciągu jest obracana w tym samym kierunku

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
42
Silniki prądu przemiennego
Silniki komutatorowe prądu przemiennego są zbliżone konstrukcyjnie do silników
szeregowych prądu stałego, z tym że zarówno stojan jaki i wirnik są w nich wykonane
z blach. Są one zwykle zasilane z sieci jednofazowej. Charakteryzują się dość dużym
momentem rozruchowym i dużą prędkością obrotową. Znajdują zastosowanie w urządzeniach
gospodarstwa domowego, a w przemyśle do napędu urządzeń automatyki.
Silniki indukcyjne buduje się w dwóch odmianach, jako jednofazowe i trójfazowe. Są one
powszechnie stosowane w przemyśle stanowiąc około 90% silników tam używanych. Zasada
działania silnika indukcyjnego polega na wykorzystaniu wirującego pola magnetycznego.
Wirujące pola magnetyczne w maszynach elektrycznych uzyskuje się w wyniku nakładania
się na siebie zmiennych pól magnetycznych wytworzonych przez poszczególne uzwojenia
stojana zasilane prądem trójfazowym. Pole to oddziałuje na przewody nieruchomego na
początku wirnika i na zasadzie indukcji elektromagnetycznej, powoduje wzbudzenie w nich
przepływu prądu elektrycznego. Przewody uzwojeń wirnika, w których płyną zaindukowane
prądy, „pociągane” są przez wirujące pole magnetyczne, wprawiając wirnik w ruch obrotowy.
Wirnik obraca się zawsze wolniej niż wirujące pole magnetyczne, nie będąc
z niezsynchronizowanym. Gdyby wirnik obracał się z prędkością wirowania pola, jego
uzwojenia nie przecinałyby linii pola i wówczas w uzwojeniach wirnika nie indukowałyby się
prądy, a co za tym idzie nie powstałby moment obrotowy. Trójfazowe silniki elektryczne
budowane są jako klatkowe i pierścieniowe. W trójfazowym silniku elektrycznym stojan
wyposażony jest w trzy uzwojenia.
Bez względu na to, czy uzwojenia połączone są w trójkąt czy w gwiazdę, po załączeniu
do źródła napięcia wewnątrz stojana tworzy się wirujące pole magnetyczne. Wynika to
z faktu, że przez odpowiednio rozmieszczone uzwojenia poszczególnych faz stojana, płyną
prądy przesunięte względem siebie w fazie o 120º. Każde z tych uzwojeń wytwarza wokół
siebie zmienne pole magnetyczne. Trzy pola nakładają się na siebie, tworząc pole wirujące.
W zależności od rodzaju zastosowanego wirnika, wyróżnia się dwa typy trójfazowych
silników elektrycznych:
−
klatkowy, w którym wirnik ma uzwojenie w postaci prętów o zwartych końcach,
−
pierścieniowy, w którym wirnik ma uzwojenia trójfazowe połączone w gwiazdę.
Oba typy silnika działają na podobnej zasadzie. Zasilane prądem trójfazowym uzwojenia
stojana powodują powstanie w jego wnętrzu wirującego pola magnetycznego, co jest
przyczyną przepływu prądu w zamkniętych obwodach uzwojeń wirnika. Na uzwojenia
wirnika zaczynają działać siły elektrodynamiczne, które powodują jego obrót w kierunku
zgodnym z kierunkiem wirowania pola.
Silnik klatkowy ma bardzo prostą budowę, dzięki czemu jest on tani w produkcji
i eksploatacji oraz niezawodny. Poza tym cechuje go niewielka zmienność prędkości
obrotowej przy dużych zmianach obciążenia i dość łatwy rozruch. Zaletą jest również
możliwość przeciążania go w znacznym zakresie.
Wadą jest duży prąd pobierany podczas rozruchu i niewielki współczynnik mocy (cosφ =
0,7- 0,85), a także znaczny wpływ wahań napięcia zasilającego na moment obrotowy silnika.
Silniki klatkowe stosowane są do napędu obrabiarek, dźwigów, różnego rodzaju maszyn
przemysłowych.
Silnik pierścieniowy ma bardziej skomplikowaną budowę, jednak również odznacza się
niewielkimi zmianami prędkości obrotowej przy zmianach obciążenia, pobiera mały prąd
podczas rozruchu. Do wad można zaliczyć mały współczynnik mocy i podatność na wahania
napięcia zasilającego. Silniki te są zwykle silnikami dużej mocy, nadają się do napędu
maszyn uruchamianych pod pełnym obciążeniem
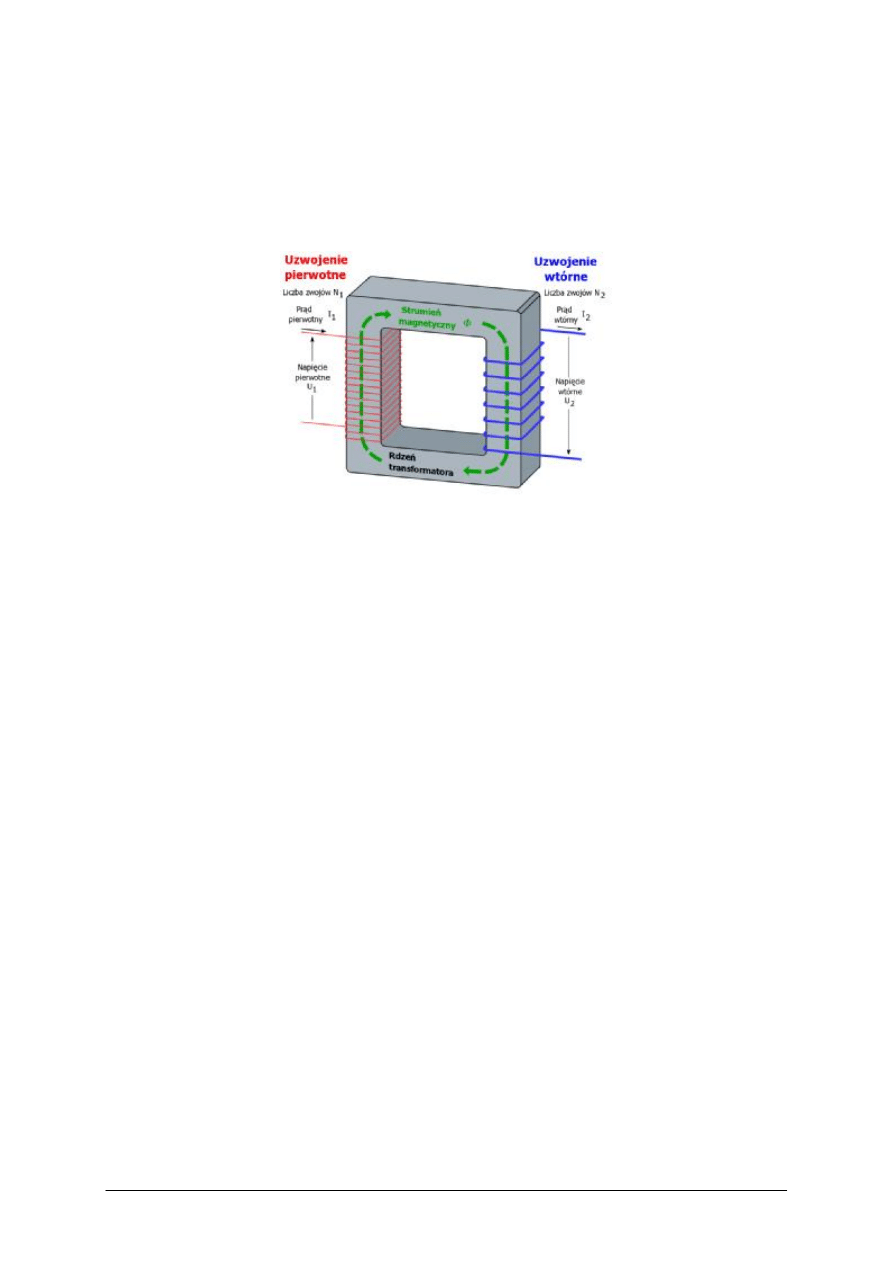
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
43
Transformator
Transformator jest to urządzenie elektryczne, w którym energia elektryczna prądu
przemiennego jednego napięcia zamieniane jest na energię elektryczna innego napięcia.
Transformatory stosuje się zarówno do przetwarzania energii prądu jednofazowego, jak
i trójfazowego. Rozróżnia się zatem transformatory jednofazowe i trójfazowe. Zasada
działania transformatora pokazana jest na rysunku 27.
Rys.27. Budowa i zasada działania transformatora [www.].
Transformator zbudowany jest z następujących części:
−
uzwojenie pierwotne - cewka o liczbie zwojów n
1
,
−
uzwojenie wtórne – cewka o liczbie zwojów n
2,
−
rdzeń , na który nałożone są oba uzwojenia.
Uzwojenie wykonane jest z miedzianego drutu lakierowanego. Stosunek liczby zwojów
uzwojenia górnego do uzwojenia dolnego nazywa się przekładnią zwojową transformatora.
Rdzenie transformatora wykonuje się zwykle z blach stalowych (jest to tzw. blacha
transformatorowa, krzemowa, walcowana na zimno), izolowanych między sobą. Pionowe
elementy rdzenia, na których umieszczone są uzwojenia nazywa się kolumnami, a elementy
poziome, łączące kolumny – jarzmami.
Uzwojenie transformatora, do którego załączone jest źródło zasilania nazywa się
uzwojeniem pierwotnym, a uzwojenie, do którego przyłącza się odbiornik – uzwojeniem
wtórnym.
Zasada działania transformatora opiera się o na elektromagnetycznym oddziaływaniu
uzwojeń sprzężonych ze sobą magnetycznie. Prąd płynący w uzwojeniu pierwotnym n
1
wytwarza w rdzeniu zmienne pole magnetyczne. Ze względu na dużą przenikalność
magnetyczną rdzenia, pole to rozchodzi się po całym rdzeniu. W tym zmiennym polu
magnetycznym znajduje się uzwojenie wtórne n
2
. W wyniku zjawiska indukcji
elektromagnetycznej w uzwojeniu wtórnym transformatora powstaje napięcie U
2
.
Transformatory mogą służyć do podwyższania i obniżania napięcia w sieciach
przesyłowych.
Ratowanie człowieka rażonego prądem elektrycznym
Człowiek rażony prądem elektrycznym powinien być natychmiast zbadany przez lekarza
i w razie potrzeby poddany leczeniu. Przy rażeniu prądem elektrycznym często niemożliwe
jest natychmiastowe sprowadzenie lekarza i pierwszej pomocy musza udzielić osoby
przygodne. Pomoc taka musi być jednak udzielona z zachowaniem zasad, zapewniających
zarówno bezpieczeństwo ratującego jak i poprawne wykonanie czynności ratowniczych
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
44
Kolejność czynności powinna być następująca:
−
uwolnienie osoby rażonej spod napięcia,
−
rozpoznanie skutków rażenia i stanu zdrowia rażonego,
−
zastosowanie właściwej metody ratowania, zależnie od rozpoznania.
Przystępując do uwalniania osoby rażonej spod napięcia, należy w pierwszej kolejności
szybko wyłączyć obwód elektryczny zasilający miejsce wypadku. Jeśli jest to niemożliwe, to
należy odciągnąć rażonego od przedmiotów lub urządzeń znajdujących się pod napięciem,
pamiętając, że dotknięcie gołymi rękami osoby rażonej, sami możemy ulec porażeniu.
Dlatego należy użyć przedmiotów nieprzewodzących np. suchej deski lub kija. Jeśli to nie
daje rezultatów, to można odciągnąć rażonego rękami, stojąc na powierzchni izolacyjnej np.
na suchej desce i chwytać rażonego przez materiał izolacyjny, np. ręką grubo owiniętą suchą
tkaninę.
Dalsze postępowanie ratującego zależy od tego, czy osoba rażona jest przytomna czy też
nie. W pierwszym przypadku należy ułożyć go wygodnie na wznak z głową odchyloną do
tyłu, rozluźnić ubranie w okolicy szyi, klatki piersiowej i brzucha, opatrzyć rany i przewieźć
poszkodowanego do lekarza. W przypadku, gdy poszkodowany jest nieprzytomny należy
ustalić, czy oddycha i czy pracuje serce.
Objawami braku oddychania są:
−
brak ruchów klatki piersiowej,
−
brak szmeru wydychanego powietrza,
−
sinienie twarzy i paznokci.
−
Objawami zatrzymania krążenia krwi są:
−
brak tętna w tętnicy szyjnej i udowej,
−
blade lub sinoblade zabarwienie skóry,
−
zwiotczenie mięśni (uniesione kończyny bezwładnie opadają).
Jeżeli stwierdzimy u rażonego zanik oddychania, to należy sprawdzić drożność jego dróg
oddechowych tzn. czy nie są zablokowane np. przez zapadający się język, opadającą żuchwę,
krew, ślinę lub wymiociny. Ewentualne przyczyny niedrożności należy usunąć i przystąpić do
sztucznego oddychania według jednej ze znanych i zalecanych metod: usta-usta, usta-nos,
usta-usta-nos. Jeżeli u rażonego nie wyczuwamy tętna lub jest ono nierównomierne, to trzeba
przeprowadzić bezpośredni masaż serca przez miarowe, silne uciskanie dolnej części mostka
z częstotliwością 60 – 70 razy na minutę. Skuteczność zabiegu sprawdzać co 15, 20 sekund.
Dopiero po przywróceniu rażonemu tętna i oddechu, można przystąpić do opatrzenia ran
i przetransportowania go do szpitala. Jeśli dysponujemy środkiem transportu, w którym
możliwe jest wykonanie sztucznego oddychania i masażu serca, to należy te zabiegi
wykonywać w drodze do lekarza, zwiększa to szanse rannego na uratowanie.
Automatyka przemysłowa
Typowym zadaniem automatyki przemysłowej jest nadzór i poprawne prowadzenie
procesów technologicznych bez bezpośredniego udziału człowieka. Można powiedzieć, że
automatyka to istotny etap na drodze rozwoju ludzkości. Poprzedził go etap mechanizacji,
który przez wprowadzenie maszyn i przetwarzanie energii uwolnił człowieka od ciężkiej
pracy fizycznej. Automatyka powszechnie zastępuje człowieka w prostych, ale i coraz
bardziej skomplikowanych procesach myślowych, na co pozwala szybki rozwój informatyki.
Podstawowe pojęcia
Miejsce, maszynę, urządzenie, w którym przebiega proces technologiczny nazywamy
obiektem technologicznym. Obiektem w znaczeniu szerszym określamy wydzieloną część
środowiska. Świadome, celowe oddziaływanie na obiekt nazywamy sterowaniem. Aby je
określić i wypracować trzeba dysponować odpowiednimi urządzeniami – elementami
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
45
automatyki, które odpowiednio przetworzą posiadaną informację i sterując strumieniem
energii dostarczanej do obiektu będą w sposób pożądany wpływać na jego stan. Nośnikami
informacji są fizyczne wielkości zwane sygnałami. Informacje mogą być kodowane w formie
analogowej, lub cyfrowej.
Elementem automatyki nazywa się dowolny podzespół, zespół, przyrząd lub urządzenie
występujące w układach automatycznej regulacji, w którym można wyodrębnić sygnały
wejściowy i sygnały wyjściowy. Z elementów automatyki buduje się układy sterowania
automatycznego. Układem sterowania automatycznego nazywa się zespół składający się
z obiektu sterowania i oddziałujących na niego urządzeń. Rozróżnia się dwa podstawowe
rodzaje układów sterowania automatycznego: otwarte i zamknięte. Na rysunku 28
przedstawiono części składowe układu sterowania.
Rys.28. Układ sterowania automatycznego.
Podstawowymi środkami wykorzystanymi przy technicznej realizacji układów kontroli
automatycznej są:
1. czujniki,
−
rezystancyjne,
−
indukcyjne,
−
pojemnościowe,
−
fotoelektryczne,
−
pneumatyczne,
2. wzmacniacze,
−
elektroniczne,
−
magnetyczne,
−
elektromaszynowe,
3. wskaźniki, rejestratory, sygnalizatory,
4. przekaźniki,
5. elementy wykonawcze,
6. przetworniki.
Informacje zebrane i przetworzone przez urządzenie sterujące realizowane są w układach
sterujących.
Układ sterujący jest to zestaw elementów zmieniających wartość określonej wielkości
fizycznej zwaną wielkością sterowaną w funkcję innej wielkości fizycznej zwanej wielkością
wiodącą.
Obiekt sterowany – określone urządzenie, strumień energii lub masy oddziaływujące na
układ sterowania.
Sterownik (człon sterujący) jest to element układu sterującego przetwarzający sygnały
otrzymane od wielkości wiodącej na sygnały sterujące przekazane do siłownika
Siłownik – element układu sterującego wytwarzający sygnał o charakterze przesunięcia
kątowego lub liniowego potrzebnego do przestawienia nastawnika.
Nastawnik – element układu sterującego wpływający bezpośrednio na natężenie bądź
kierunek strumienia energii lub masy przepływającej przez obiekt sterowany
Człon wykonawczy – element lub zespół elementów układu sterującego przetwarzający
sygnały wejściowe otrzymane od sterownika na zmiany natężenia lub kierunku strumienia
energii bądź masy. Gdy sygnał ze sterownika jest niewystarczający istnieje konieczność

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
46
zastosowania wzmacniacza, elementu zwiększającego sygnał wejściowy, względnie
zmieniającego rodzaj i moc sygnału wejściowego dla sterowania następnym elementem
w obwodzie
Napędy i sterowanie pneumatyczne i hydrauliczne
Napęd i sterowanie pneumatyczne
Napęd pneumatyczny jest to napęd mechanizmów maszyn i urządzeń przy wykorzystaniu
energii sprężonego gazu (zazwyczaj powietrza).
Sterowanie pneumatyczne jest to technika oddziaływania w określony sposób na obiekt
sterowania za pomocą sprężonego powietrza jako energetycznego nośnika informacji.
Urządzenia do budowy układów napędu i sterowania pneumatycznego można podzielić
na:
Urządzenia części wykonawczej
1. urządzenia przetwarzające energię czynnika na pracę mechaniczną,
−
silniki pneumatyczne o ruch obrotowym,
−
silniki pneumatyczne o ruchu wahadłowym,
−
silniki pneumatyczne o ruchu postępowo-zwrotnym,
2. urządzenia sterujące energią sprężonego powietrza,
−
zawory pneumatyczne sterujące kierunkiem przepływu,
−
zawory pneumatyczne sterujące ciśnieniem,
−
zawory pneumatyczne sterujące natężeniem przepływu,
Urządzenia części centralnej,
3. urządzenia pneumatyczne dyskretne do poboru i wprowadzania informacji do części
centralnej układu,
−
przekaźniki pomiarowe pneumatyczne,
−
urządzenia ręcznego wprowadzania informacji,
−
pneumatyczne urządzenia automatycznego wprowadzania informacji,
4. urządzenia pneumatyczne dyskretne do przetwarzania i wydawania informacji
−
pneumatyczne urządzenia przetwarzania informacji,
−
pneumatyczne urządzenia wskazujące,
−
pneumatyczne urządzenia rejestrujące,
5. urządzenia pneumatyczne do przekształcania informacji,
−
przetworniki różnych poziomów ciśnienia sygnałów,
−
przetworniki różnych postaci sygnałów,
−
przetworniki różnych nośników sygnałów,
Urządzenia pomocnicze
6. urządzenia przygotowujące czynnik w układach,
−
oddzielacze pneumatyczne,
−
smarownice pneumatyczne,
−
wymienniki ciepła pneumatyczne,
7. urządzenia do przewodzenia i gromadzenia czynnika w układach pneumatycznych,
−
przewody pneumatyczne,
−
łączniki pneumatyczne,
−
zbiorniki pneumatyczne,
−
tłumiki hałasu pneumatyczne.
Napęd pneumatyczny jest najbardziej rozpowszechniony w maszynach i urządzeniach
technologicznych do realizacji przesuwów mechanizmów oraz wywoływania określonego
nacisku statycznego.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
47
Napęd i sterowanie hydrauliczne
Napęd hydrauliczny jest to napęd wywołany ruchem cieczy pod ciśnieniem, oparty na
prawie Pascala. Sterowanie hydrauliczne jest kierowaniem pracą maszyny pod ciśnieniem.
Zasada działania napędu hydraulicznego opiera się na prawie Pascala, w myśl którego
ciśnienie wywarte w jednym punkcie cieczy znajdującej się w równowadze (mechanicznej
i cieplnej) rozchodzi się jednakowo we wszystkich kierunkach.
Naczynie całkowicie wypełnione cieczą pokazane na rysunku 28 ma dwa otwory,
w których znajdują się szczelnie do nich przylegające, ale zdolne do wykonywania ruchów
posuwistych nurniki (tłoki) o średnicach d i D. Zakładając, że nie ma strat cieczy wskutek
Rys. 28. Schemat napędu hydraulicznego jednonaczyniowego [6, s. 274].
nieszczelności, ani tarcia nurników w otworach i że ciecz jest całkowicie nieściśliwa,
otrzymamy ciśnienie
2
d
F
4
p
π
=
gdzie F jest siłą wywieraną na nurnik o mniejszej średnicy.
Zgodnie z prawem Pascala na nurnik o większej średnicy D będzie działała w kierunku
jego osi siła
2
2
2
2
2
d
D
F
4
D
d
F
4
4
F
4
D
p
'
F
=
π
π
=
π
=
która jest znacznie większa od siły F. Podobne zależności można wyprowadzić dla wielkości
H przesunięcia nurnika o średnicy D.
2
2
D
d
h
H
=
Jak widać z powyższego wzoru, przesunięcie H nurnika o średnicy D będzie znacznie
mniejsze od przesunięcia H nurnika o średnicy d.
Urządzenia i elementy zespołów napędowych i sterujących układów hydraulicznych
można podzielić na:
1. Elementy przetwarzające różne postacie energii na energię cieczy roboczej w układach
hydraulicznych,
−
pompy hydrauliczne,
−
pompy hydrauliczne umownie ręczne,
−
akumulatory hydrauliczne,
−
przetworniki hydrauliczne.
2. Hydrauliczne elementy sterujące występujące w układach hydraulicznych,
−
zawory hydrauliczne sterujące kierunkiem przepływu,
−
zawory hydrauliczne sterujące ciśnieniem,
−
zawory hydrauliczne sterujące natężeniem przepływu.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
48
3. Elementy przetwarzające energię cieczy roboczej na energię mechaniczną w układach
hydraulicznych,
−
silniki hydrauliczne o ruch obrotowym,
−
silniki hydrauliczne o ruch wahadłowym,
−
cylindry hydrauliczne.
4. Elementy utrzymujące właściwości cieczy roboczej w układach hydraulicznych,
−
filtry hydrauliczne,
−
wymienniki hydrauliczne ciepła.
5. Elementy przewodzące i gromadzące ciecz roboczą,
−
przewody hydrauliczne,
−
łączniki hydrauliczne,
−
zbiorniki hydrauliczne.
6. Elementy i zespoły układów hydraulicznych pozostałe,
−
przekładnie hydrauliczne występujące w układach hydraulicznych,
−
stacje zasilania hydrauliczne,
−
wzmacniacze hydrauliczne,
−
zespoły zasilania hydrauliczne.
Z uwagi na zalety stosowania napędu i sterowania hydraulicznego, nie ma takiego
rodzaju przemysłu, czy też dziedziny gospodarki narodowej, gdzie nie byłyby stosowane
układy hydrauliczne. Są one spotykane w: budowie maszyn, lotnictwie, okrętownictwie,
motoryzacji, kolejnictwie, hutnictwie, górnictwie, rolnictwie, budownictwie lądowym
i wodnym, sprzęcie militarnym, pojazdach i rakietach kosmicznych, gdzie obok pneumatyki
i elektroniki stanowią podstawowe układy napędu i sterowania.
4.3.2. Pytania sprawdzające
Odpowiadając na pytania, sprawdzisz, czy jesteś przygotowany do ćwiczeń.
1. Na czym polega zjawisko indukcji elektromagnetycznej?
2. Jakie materiały nazywają się paramagnetycznymi?
3. Jakie materiały nazywają się diamagnetycznymi?
4. Jakie materiały nazywają się ferromagnetycznymi?
5. Jaką maszynę nazywamy silnikiem elektrycznym?
6. Jakie znasz rodzaje silników elektrycznych prądu przemiennego?
7. Jaka jest zasada działania silnika elektrycznego prądu przemiennego?
8. Jakie urządzenie nazywamy transformatorem?
9. Jakie są zasady bezpiecznej obsługi urządzeń elektrycznych
10. Jakie znasz elementy automatyki?
11. Wymień elementy kontroli automatycznej?
12. Co nazywamy członem wykonawczym?
13. Jakie elementy układu hydraulicznego zaliczają się do układów sterujących?
4.3.3. Ćwiczenia
Ćwiczenie 1
Na podstawie rysunków przedstawiających istotę indukcji elektromagnetycznej, zdefiniuj
to zjawisko.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
49
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zorganizować stanowisko pracy do wykonania ćwiczenia,
2) zapoznać się z wiadomościami na temat zjawiska indukcji elektromagnetycznej,
3) opisać rysunki obrazujące zjawisko indukcji elektromagnetycznej,
4) dokonać oceny pracy.
Wyposażenie stanowiska pracy:
−
plansza z rysunkami pokazującymi zjawisko indukcji elektromagnetycznej,
−
kartka papieru,
−
ołówek,
−
gumka,
−
poradnik dla ucznia.
Ćwiczenie 2
Na planszy z definicjami materiałów paramagnetycznych, diamagnetycznych
i ferromagnetycznych umieść kartki samoprzylepne z nazwami tych materiałów.
Sposób wykonania ćwiczenia:
Aby wykonać ćwiczenie powinieneś:
1) zorganizować stanowisko pracy do wykonania ćwiczenia,
2) zapoznać się z wiadomościami na temat właściwości magnetycznych materiałów,
3) na kartce napisać nazwę, określającą rodzaj materiału,
4) kartkę przykleić pod odpowiednią definicją,
5) dokonać oceny pracy.
Wyposażenie stanowiska pracy:
−
plansza definicjami materiałów para, dia i ferromagnetycznych,
−
kartki samoprzylepne,
−
ołówek,
−
gumka,
−
poradnik dla ucznia.
Ćwiczenie 3
Wykonaj badanie transformatora
Sposób wykonania ćwiczenia
Aby wykonać ćwiczenie powinieneś:
1) zorganizować stanowisko pracy do wykonania ćwiczenia,
2) zapoznać się z wiadomościami na temat budowy i działania transformatora,
3) zapoznać się z przebiegiem badania transformatora znajdującym się w instrukcji do tego
ćwiczenia,
4) połączyć elementy zestawu według schematu znajdującego się w instrukcji,
5) wykonać badanie posługując się zestawem do wykonania tego ćwiczenia,
6) wykonać protokół badania,
7) zaprezentować efekty swojej pracy,
8) dokonać oceny pracy.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
50
Wyposażenie stanowiska pracy:
−
zestaw do wykonania badania transformatora,
−
instrukcja do wykonania ćwiczenia,
−
kartka papieru formatu A4,
−
przyrządy kreślarskie,
−
ołówek,
−
gumka,
−
literatura fachowa.
4.3.4. Sprawdzian postępów
Czy potrafisz:
Tak
Nie
1) określić kierunek linii pola magnetycznego?
o
o
2) wyjaśnić zjawisko indukcji magnetycznej?
o
o
3) zdefiniować i podać kilka przykładów materiałów paramagnetycznych?
o
o
4) zdefiniować i podać kilka przykładów materiałów diamagnetycznych?
o
o
5) zdefiniować i podać kilka przykładów materiałów ferromagnetycznych?
o
o
6) opisać budowę silnika prądu przemiennego?
o
o
7) opisać budowę silnika prądu stałego?
o
o
8) opisać budowę i wyjaśnić zasadę działania transformatora?
o
o
9) zastosować zasady bezpiecznej obsługi urządzeń elektrycznych?
o
o
10) określić zasady prawidłowej konserwacji maszyny?
o
o
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
51
5. SPRAWDZIAN OSIĄGNIĘĆ
INSTRUKCJA DLA UCZNIA
1. Przeczytaj uważnie instrukcję.
2. Podpisz imieniem i nazwiskiem kartę odpowiedzi.
3. Zapoznaj się z zestawem zadań testowych.
4. Test zawiera 20 zadania. Do każdego zadania dołączone są 4 możliwości odpowiedzi.
Tylko jedna jest prawidłowa.
5. Udzielaj odpowiedzi na załączonej karcie odpowiedzi, stawiając w odpowiedniej rubryce
znak X. W przypadku pomyłki należy błędną odpowiedź zaznaczyć kółkiem, a następnie
ponownie zakreślić odpowiedź prawidłową.
6. Pracuj samodzielnie, bo tylko wtedy będziesz miał satysfakcję z wykonanego zadania.
7. Jeśli udzielenie odpowiedzi będzie Ci sprawiało trudność, wtedy odłóż jego rozwiązanie
na później i wróć do niego, gdy zostanie Ci wolny czas.
8. Na rozwiązanie testu masz 45 min.
Powodzenia
ZESTAW ZADAŃ TESTOWYCH
1. Siły możemy dodawać oraz odejmować metodą analityczną i metodą
a)
graficzną.
b)
geometryczną.
c)
podobieństwa.
d)
trygonometryczną.
2. Obliczając wartość siły z jej składowych, korzystamy z twierdzenia
a) Pitagorasa.
b) Talesa.
c) o podobieństwie trójkątów.
d) o kątach naprzemianległych.
3. Wytrzymałość materiałów zajmuje się badaniem
a) relacji pomiędzy siłami a ruchem ciał.
b) relacji pomiędzy siłami a przyśpieszeniem ciał.
c) relacji pomiędzy siłami a warunkami równowagi ciał.
d) relacji pomiędzy siłami a właściwościami mechanicznymi materiału.
4. Jednostką pracy jest
a) niuton.
b) dżul.
c) wat.
d) dyna.
5. Jednostką energii jest
a) niuton.
b) wat.
c) dżul.
d) dyna.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
52
6. Długość wałka to wymiar
a) pośredni.
b) mieszany.
c) wewnętrzny.
d) zewnętrzny.
7. Spoiny pachwinowe obliczamy z warunku na
a) skręcanie.
b) zginanie.
c) ścinanie.
d) rozciąganie.
8. Osie mogą przenosić naprężenia
a) skręcające.
b) ściskające.
c) zginające.
d) rozciągające.
9. Łożyskowanie maszyn przeprowadzamy w celu
a) zwiększenia ich sztywności.
b) zmniejszenia kosztów wytwarzania.
c) zapewnienia stałego położenia osi i wałów.
d) zablokowania możliwości obrotu osi i wałów.
10. Podstawowym parametrem charakteryzującym pracę sprzęgła jest
a) przenoszona siła.
b) przenoszony moment siły.
c) przenoszony moment obrotowy.
d) przenoszona prędkość obrotowa.
11. Do pompowania cieczy gęstych i zanieczyszczonych najkorzystniej zastosować pompę
a) nurnikową.
b) odśrodkową.
c) tłokową.
d) wielotłoczkową.
12. Sprężarki są wykorzystywane do
a) podawania cieczy.
b) przepompowywania cieczy.
c) sprężania cieczy.
d) sprężania gazów.
13. Wokół przewodnika, przez który płynie prąd powstaje
a) prąd wirowy.
b) pole magnetyczne.
c) siła elektromotoryczna.
d) siła elektrodynamiczna.

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
53
14. Zjawisko indukcji elektromagnetycznej polega na
a) powstawaniu pola magnetycznego wokół przewodnika z prądem stałym.
b) powstawaniu pola magnetycznego wokół przewodnika z prądem przemiennym.
c) powstawaniu siły elektromotorycznej w obwodzie elektrycznym skojarzonym ze
zmieniającym się strumieniem magnetycznym.
d) powstawaniu siły elektromotorycznej w dowolnym obwodzie.
15. Maszyna zamieniająca energię mechaniczną na energię elektryczną to
a) twornik.
b) prądnica.
c) magneśnica.
d) silnik elektryczny.
16. Silnik elektryczny służy do
a)
wytwarzania siły elektrodynamicznej.
b)
wytwarzania siły elektromotorycznej.
c)
zmiany napięcia.
d)
zmiany natężenia prądu.
17. Do silników prądu przemiennego nie należy
a)
silnik szeregowo-bocznikowy.
b)
silnik pierścieniowy indukcyjny.
c)
silnik klatkowy.
d)
silnik komutatorowy.
18. W napędach hydrauliczny ruch siłowników jest wywołany
a) ruchem gazu pod ciśnieniem.
b) ruchem cieczy.
c) ruchem cieczy pod ciśnieniem.
d) ruchem gazu.
19. Wzmacniaczem nazywamy
a)
element zwiększający sygnał wejściowy.
b)
element zwiększający sygnał wyjściowy.
c)
element przetwarzający sygnał.
d)
element wpływający bezpośrednio na natężenie bądź kierunek strumienia energii.
20. W układach pneumatycznych wykorzystuje się energię
a)
przegrzanej pary wodnej.
b)
gazów spalinowych.
c)
sprężonego gazu.
d)
cieczy pod wysokim ciśnieniem.
„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
54
KARTA ODPOWIEDZI
Imię i nazwisko..................................................................................
Charakteryzowanie maszyn i urządzeń
Zakreśl poprawną odpowiedź.
Nr
zadania
Odpowiedź
Punkty
1.
a
b
c
d
2.
a
b
c
d
3.
a
b
c
d
4.
a
b
c
d
5.
a
b
c
d
6.
a
b
c
d
7.
a
b
c
d
8.
a
b
c
d
9.
a
b
c
d
10.
a
b
c
d
11.
a
b
c
d
12.
a
b
c
d
13.
a
b
c
d
14.
a
b
c
d
15.
a
b
c
d
16.
a
b
c
d
17.
a
b
c
d
18.
a
b
c
d
19.
a
b
c
d
20.
a
b
c
d
Razem :

„Projekt współfinansowany ze środków Europejskiego Funduszu Społecznego”
55
6. LITERATURA
1. Grabkowski M. i inni. Zarys procesów wytwarzania obuwia. Skrypt Politechniki
Radomskiej, Radom 2003
2. Kurmaz L. W., Kurmaz O. L.: Projektowanie węzłów i części maszyn. Wydawnictwo
Politechniki Świętokrzyskiej, Kielce 2006
3. Malik B.: Podstawy konstrukcji maszyn (zbiór zadań). Wydawnictwo Szkolne PWN,
Warszawa – Łódź 2000
4. Nowicki J.: Podstawy
elektrotechniki
i
elektroniki
dla
zasadniczych
szkół
nieelektrycznych. WSIP, Warszawa 1999
5. Pala S.: Maszyny i urządzenia obuwnicze. WSIP, Warszawa 1973
6. Rutkowski A., Stępień A.: Zbiór zadań z części maszyn. WSIP, Warszawa 1994
7. Siuta W.: Mechanika Techniczna. PWSzZ, Warszawa 1971
8. Mały Poradnik mechanika. Tom I i II. WNT, Warszawa 1994
9. Praca zbiorowa: Podstawy racjonalnej eksploatacji maszyn. Instytut Technologii
Eksploatacji Radom 1996
Czasopisma:
–
Mechanik
–
Przegląd Mechaniczny
Wyszukiwarka
Podobne podstrony:
03 Charakteryzowanie maszyn i u Nieznany
07 Charakteryzowanie maszyn i urządzeń
02 Charakteryzowanie maszyn rol Nieznany (2)
07 Uzytkowanie maszyn i urzadze Nieznany
07 Okreslanie budowy maszyn i u Nieznany (2)
07 Obslugiwanie maszyn i urzadz Nieznany (2)
HYDROLOGIA 07 id 207788 Nieznany
Charakterystyka i prozdrowotne Nieznany
02 Charakteryzowanie produkcji Nieznany (2)
ile czasu trwa naprawa maszyny Nieznany
5 4 Charakterystyki regulacyjne Nieznany (2)
2003 07 Szkola konstruktorowid Nieznany
07 Wykonywanie maszynowej obróbki drewna
2006 07 podkarpackie IIIetapid Nieznany (2)
hih kolo kolo2 07 id 709394 Nieznany
03 Charakteryzowanie maszyn i urządzeńid 4335
I CSK 304 07 1 id 208210 Nieznany
10 Charakteryzowanie budowy i f Nieznany (2)
więcej podobnych podstron