
Systemy i funkcje mechatroniczne - Podręcznik
Minos
3
Spis treści:
1
Czujniki indukcyjne........................................................................................................... 7
1.1 Informacje
podstawowe.................................................................................................... 7
1.2 Konstrukcja
podstawowa.................................................................................................. 8
1.3 Współczynniki korekcyjne .............................................................................................. 11
1.4 Sposób
zabudowy .......................................................................................................... 12
1.5 Czujniki
specjalne........................................................................................................... 13
1.5.1 Czujniki
indukcyjne
pierścieniowe .................................................................................. 13
1.5.2 Czujniki
pracujące w silnym polu elektromagnetycznym................................................ 14
1.5.3 Czujniki
pracujące w trudnych warunkach...................................................................... 15
1.6 Czujniki
NAMUR............................................................................................................. 16
1.7
Analogowe czujniki indukcyjne....................................................................................... 17
1.8 Zasilanie
czujników ........................................................................................................ 18
1.9 Zasady
łączenia czujników............................................................................................. 19
1.10
Zabezpieczenia i bezpieczeństwo czujników ................................................................. 21
1.11
Podłączanie czujników do sieci komunikacyjnych.......................................................... 22
1.12 Aplikacje ......................................................................................................................... 23
2
Czujniki pojemnościowe ................................................................................................. 24
2.1
Informacje podstawowe.................................................................................................. 24
2.2
Zasada działania czujnika pojemnościowego ................................................................ 25
2.3
Typy czujników pojemnościowych.................................................................................. 27
2.4
Materiał obiektu .............................................................................................................. 28
2.5
Kompensacja zakłóceń ................................................................................................. 29
2.6
Aplikacje ......................................................................................................................... 30
3
Czujniki ultradźwiękowe ................................................................................................. 32
3.1
Informacje podstawowe ................................................................................................. 32

Systemy i funkcje mechatroniczne - Podręcznik
Minos
4
3.2
Wpływ środowiska .......................................................................................................... 33
3.3
Wytwarzanie fali ultradźwiękowej ................................................................................... 34
3.4
Zasada pracy .................................................................................................................. 36
3.5
Zakłócenia pracy czujników ............................................................................................ 41
3.6
Synchronizacja czujników ............................................................................................... 43
3.7
Specjalne czujniki ultradźwiękowe.................................................................................. 44
3.7.1 Czujnik refleksyjny .......................................................................................................... 44
3.7.2 Czujniki z dwoma przetwornikami w jednej obudowie .................................................... 45
3.7.3 Czujniki z wyjściem analogowym.................................................................................... 46
3.8
Aplikacje.......................................................................................................................... 47
4
Czujniki fotoelektryczne .................................................................................................. 49
4.1
Charakterystyka konstrukcji ............................................................................................ 49
4.2
Podstawowe rodzaje czujników ...................................................................................... 51
4.2.1 Czujnik przelotowy .......................................................................................................... 51
4.2.2 Czujniki refleksyjne ......................................................................................................... 52
4.2.3 Czujniki dyfuzyjne ........................................................................................................... 53
4.3
Zapobieganie interferencji............................................................................................... 53
4.3.1 Modulacja
światła............................................................................................................ 54
4.3.2 Polaryzacja światła ........................................................................................................ 55
4.4
Margines działania ......................................................................................................... 57
4.5
Odległość robocza .......................................................................................................... 59
4.6
Czas reakcji .................................................................................................................... 60
4.7
Specjalne rodzaje czujników........................................................................................... 61
4.7.1 Czujniki refleksyjne z polaryzacją światła ...................................................................... 61
4.7.2 Czujniki dyfuzyjne z eliminacja wpływu tła i pierwszego planu ...................................... 62
4.7.3 Czujniki refleksyjne z autokolimacją ............................................................................... 65
4.8
Czujniki ze światłowodami .............................................................................................. 66
4.8.1
Światłowody .................................................................................................................... 66
4.8.2 Zasada
działania............................................................................................................. 68
4.9
Technika połączeń .......................................................................................................... 70
4.9.1 Typy połączeń................................................................................................................. 70
4.9.2 Przełączanie wyjścia czujnika......................................................................................... 70
4.10 Aplikacje.......................................................................................................................... 72

Systemy i funkcje mechatroniczne - Podręcznik
Minos
5
5
Czujniki magnetyczne .................................................................................................... 74
5.1
Informacje podstawowe.................................................................................................. 74
5.2 Histereza ........................................................................................................................ 75
5.3 Efekt
Halla ...................................................................................................................... 76
5.4
Efekt magnetorezystancyjny .......................................................................................... 77
5.5
Efekt Wieganda .............................................................................................................. 78
5.6
Czujniki magnetyczne z kontaktronem .......................................................................... 79
5.7
Czujniki magnetyczne z hallotronem.............................................................................. 81
5.8.
Czujniki magnetyczne specjalne .................................................................................... 82
5.8.1 Czujniki magnetorezystancyjne...................................................................................... 82
5.8.2 Czujniki magnetyczne Wieganda ................................................................................... 83
5.8.3 Czujniki magnetyczne z magnesem ............................................................................... 85
5.9
Warunki zabudowy ......................................................................................................... 86
5.10
Aplikacje ......................................................................................................................... 87
6
Funkcje czujników w systemach mechatronicznych ...................................................... 88
6.1
Podstawowe zastosowania sensorów w systemach mechatronicznych ....................... 88
6.2 Złożoność struktur systemów mechatronicznych i umiejscowienie w nich sensorów ... 88
6.3 Złożoność funkcji systemów mechatronicznych i umiejscowienia w nich sensorów ..... 89
6.4
Zastosowanie sensorów do diagnozowania systemów mechatronicznych .................... 90
6.5
Zastosowanie sensorów w nadzorowaniu systemów mechtronicznych ........................ 92
6.6
Zastosowanie sensorów w diagnostyce serwisowej systemów mechatronicznych........ 92
7 Sieci
przemysłowe.......................................................................................................... 93
7.1
Istota komunikacji między czujnikami a odbiornikami ich sygnałów.............................. 93
7.2
Przetwarzanie cyfrowe i interfejsy cyfrowe..................................................................... 94
7.2.1
Interfejs RS 232 C (w Europie oznaczany symbolem V24)............................................ 98
7.3
Sieci komunikacyjne i zarządzanie nimi ......................................................................... 99
7.3.1 Hierarchia
komunikacji ................................................................................................... 99
7.3.2
Sieci i bus systemy polowe .......................................................................................... 100

Systemy i funkcje mechatroniczne - Podręcznik
Minos
6
7.3.3
Rodzaje sterowania sieci polowych. ............................................................................. 102
7.3.3.1 Sterowanie scentralizowane ........................................................................................ 102
7.3.3.2 Rozproszone sterowanie .............................................................................................. 103
7.4 Protokół sieci komunikacyjnej. Model OSI .................................................................... 104
7.5 Rodzaje
przemysłowych sieci komunikacyjnych (industrial bus systems).................... 107
7.5.1 Sieć typu AS-I (Fieldbus AS Interface) ......................................................................... 107
7.5.2 Sieć typu Fieldbus CAN o strukturze otwartej (Field bus CAN open) ........................... 108
7.5.3 DeviceNet ..................................................................................................................... 109
7.5.4 Fieldbus
Interbus-S....................................................................................................... 110
7.5.5 Sieć typu Profibus Field bus Professional Bus (-DP, -FMS) ......................................... 111
7.6
Ethernet jako uniwersalna sieć łącząca pozostałe standardy sieci przemysłowych ..... 115
7.7
Ujednolicenie programowe sieci polowych poprzez projekt standardu NOAH ............. 116
8 Projektowanie
podsystemów
mechatronicznych
......................................................... 119
8.1 Wprowadzenie .............................................................................................................. 119
8.1.1 Pojęcie mechatroniki..................................................................................................... 120
8.1.2
Obrabianie i instalacja pojedynczych części................................................................. 121
8.2 Projektowanie
sterowania ............................................................................................. 124
8.2.1 Regulacja ...................................................................................................................... 126
8.2.2 Złożone sterowania....................................................................................................... 127
8.2.3
Kryteria porównawcze sterowań złożonych .................................................................. 128
8.3 Części zasilania i sygnału w sterowaniach złożonych .................................................. 129
8.3.1 Część zasilania ............................................................................................................. 131
8.3.2 Część napędowa .......................................................................................................... 135
8.3.3 Elementy
sygnałowe, sterujące i wykonawcze ............................................................. 152
9 Projektowanie
złożonych systemów mechatronicznych ............................................... 157
9.1 Dobór
elementów.......................................................................................................... 157
9.2
Środki pomocnicze w projektowaniu złożonych systemów sterowania ........................ 158
9.2.1 Schemat
pozycjonowania ............................................................................................. 159
9.2.2 Diagram
przepływu programu....................................................................................... 160
9.2.3 Schemat
logiczny.......................................................................................................... 162
9.2.4 Plan
funkcji.................................................................................................................... 163
9.2.5 Wykres
funkcji............................................................................................................... 165
9.2.6 Schemat
podłączeń ...................................................................................................... 168
9.3
Tworzenie schematów podłączeń dla złożonego systemu sterowania......................... 172
9.3.1
Pneumatyczny schemat działania................................................................................. 173
9.3.2
Hydrauliczny schemat działania.................................................................................... 175
9.3.3
Schematy obwodów elektrycznych ............................................................................... 177
9.4 Realizowanie
złożonego sterowania............................................................................. 181
Systemy i funkcje mechatroniczne - Podręcznik
Minos
1
Czujniki indukcyjne
1.1
Informacje podstawowe
Czujniki indukcyjne stanowią najpopularniejszą grupę czujników sto-
sowanych w układach automatyki. Wykorzystywane są one do kontroli
położenia, przemieszczeń i ruchu mechanizmów związanych ze ste-
rowanymi urządzeniami. Ich prosta i zwarta konstrukcja, duża pew-
ność i niezawodność działania oraz łatwy montaż sprawia, że są chęt-
nie stosowane.
Czujniki te reagują, na pojawienie się przedmiotów metalowych w stre-
fie ich działania, przełączeniem stanu wyjścia czujnika lub zmianą war-
tości sygnału wyjściowego.
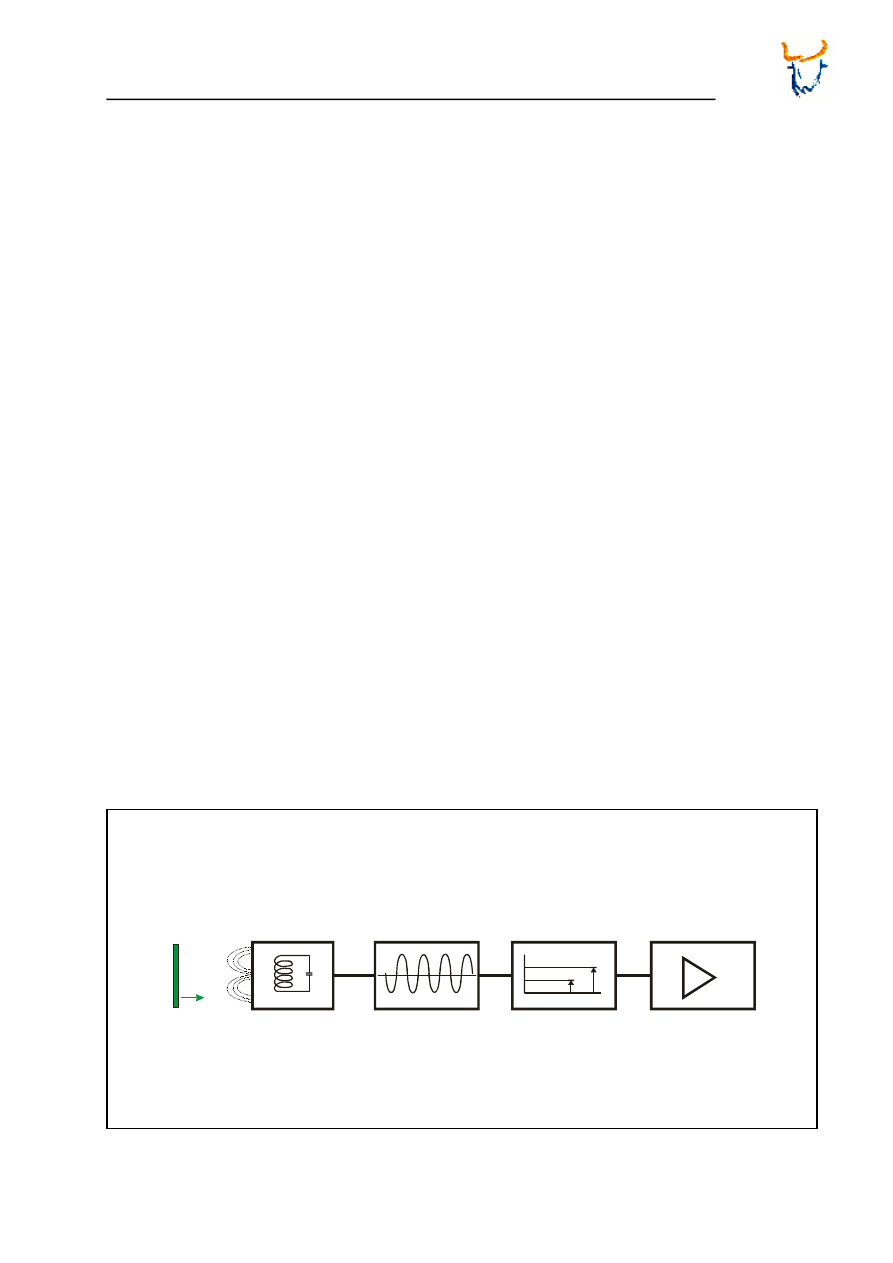
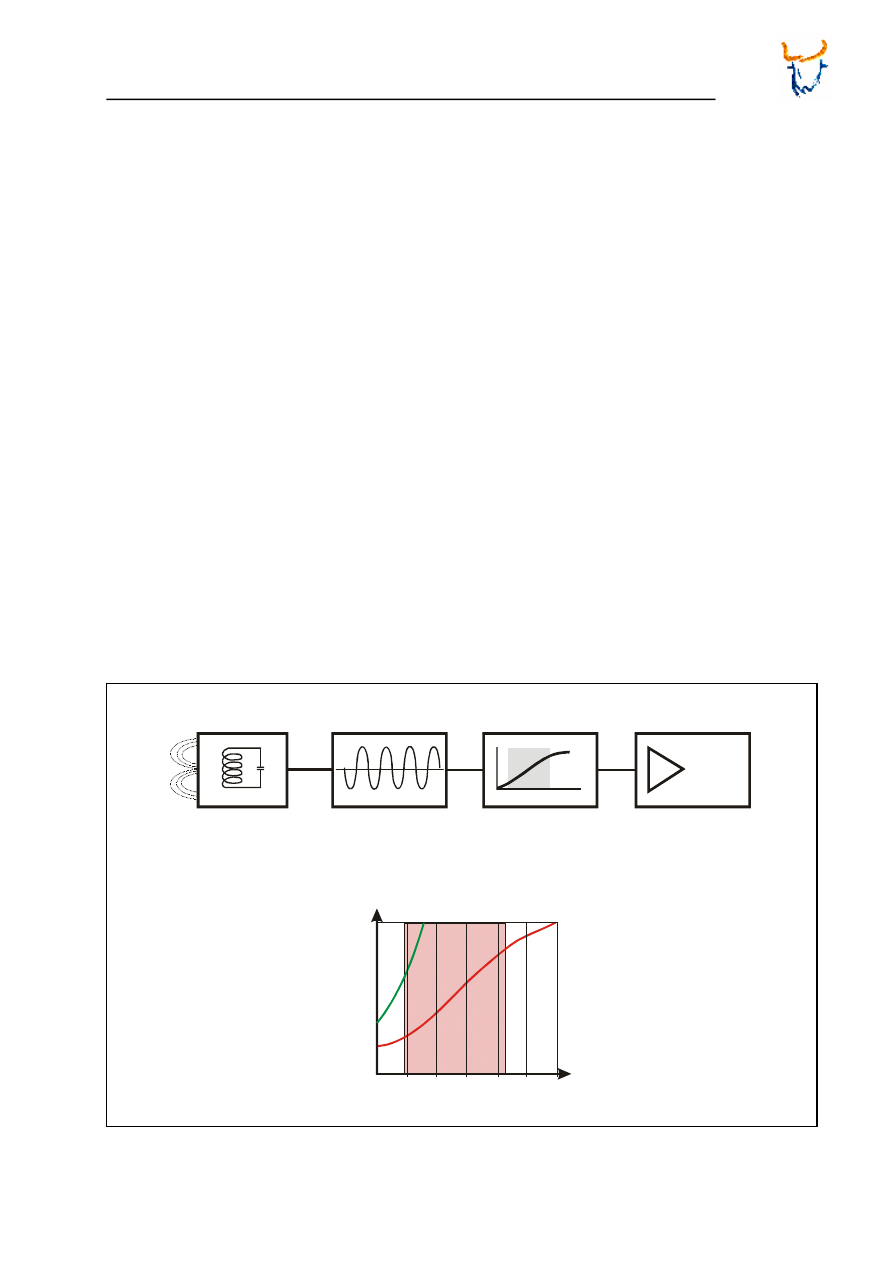
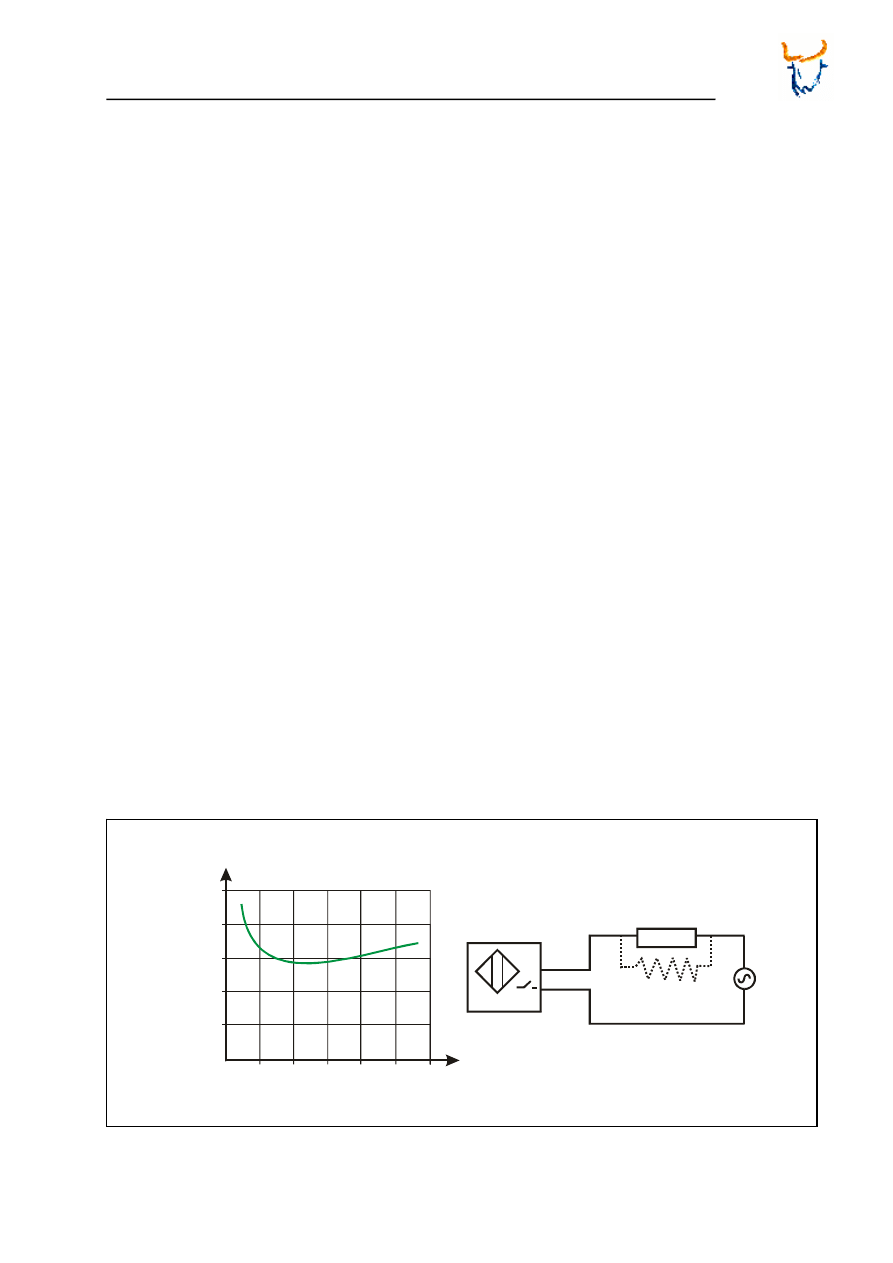
Podstawowymi składnikami czujnika indukcyjnego są (rys. 1.1): głowi-
ca zawierająca cewkę indukcyjną z rdzeniem ferrytowym, generator
napięcia sinusoidalnego, układ detekcji (komparator) i wzmacniacz
wyjściowy.
Obwód indukcyjny składający się z cewki i rdzenia ferrytowego wytwa-
rza wokół czoła czujnika zmienne pole elektromagnetyczne o wysokiej
częstotliwości. Pole to indukuje prądy wirowe w metalu zbliżanym do
czujnika, co z kolei powoduje obciążenie obwodu indukcyjnego i w
efekcie spadek amplitudy oscylacji. Wielkość tych zmian zależy od od-
ległości przedmiotu metalowego od czoła czujnika. Przełączenie wyj-
ścia następuje po zbliżeniu metalu na określoną odległość, wynikającą
z charakterystyki czujnika. W czujnikach z wyjściem analogowym po-
ziom sygnału wyjściowego jest odwrotnie proporcjonalny do odległości
obiektu od czujnika.
UKŁAD
WYJŚCIOWY
UKŁAD
DETEKCJI
UKŁAD
GENERATORA
GŁOWICA
CZUJNIKA
OBIEKT
L
C
Rys. 1.1:
Budowa czujnika indukcyjnego
7
Systemy i funkcje mechatroniczne - Podręcznik
Minos
1.2
Konstrukcja podstawowa
Część aktywna czujnika indukcyjnego zawiera cewkę nawiniętą na fer-
rytowym rdzeniu kubkowym, wytwarzającą zmienne pole magnetycz-
ne. Zadaniem rdzenia kubkowego, o otwartym obwodzie magnetycz-
nym, jest wzmocnienie strumienia magnetycznego cewki oraz skiero-
wanie go w kierunku strefy pomiarowej czujnika.
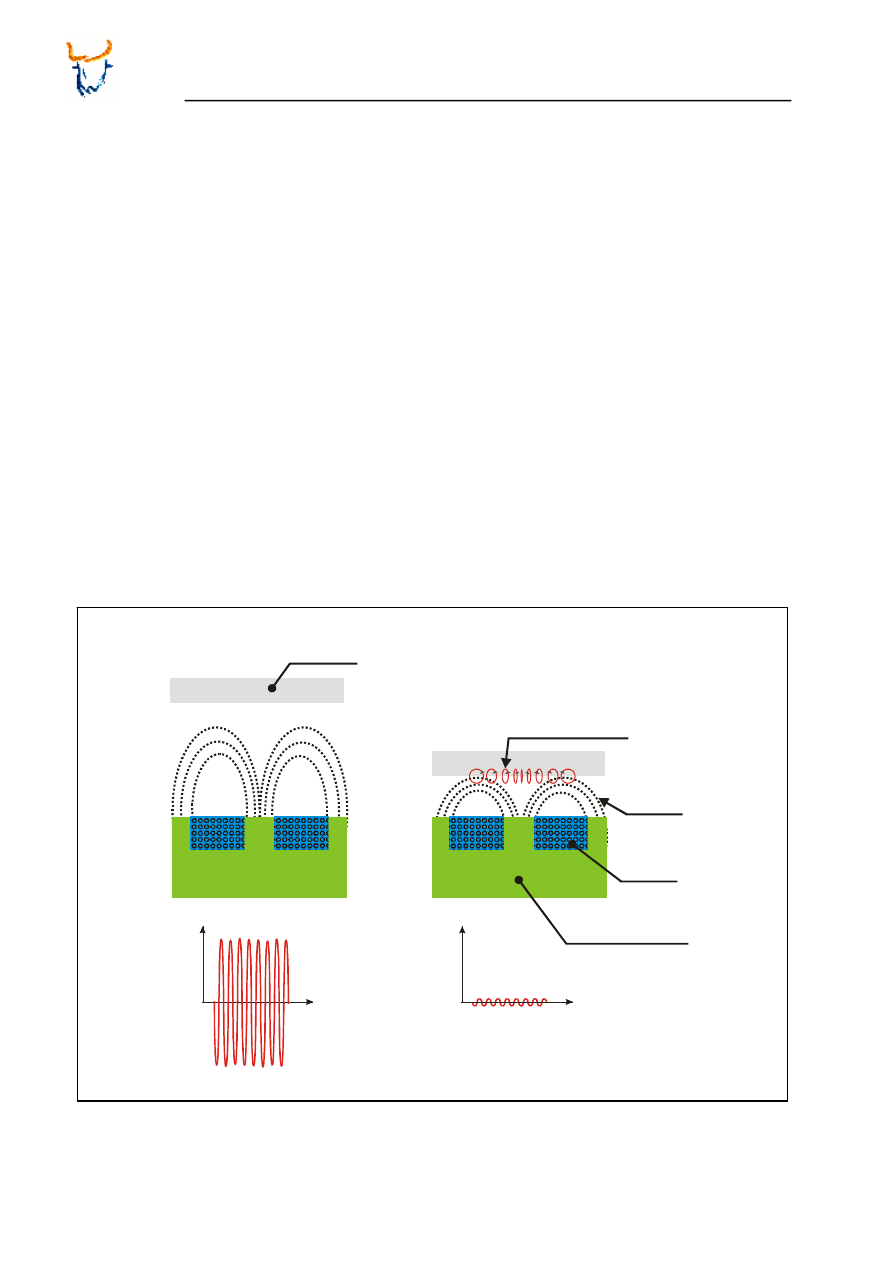
Zmianom pola magnetycznego towarzyszy zawsze powstanie pola
elektrycznego (wirowego). Gdy w tym zmiennym polu elektrycznym
znajdzie się przewodnik, to wokół linii pola elektrycznego pojawi się
pole magnetyczne wirowe (rys. 1.2). Przeciwdziała ono polu magne-
tycznemu cewki, odbierając część energii z obwodu rezonansowego.
Jest to równoznaczne ze zmianą strat w obwodzie rezonansowym, co
powoduje pogorszenie jego dobroci. Skutkuje to
tłumieniem amplitudy
oscylacji. Tłumienie amplitudy utrzymuje się przez cały czas przeby-
wania obiektu przewodzącego w strefie działania pola magnetycznego
cewki. Po usunięciu przedmiotu tłumienie obwodu rezonansowego za-
nika i amplituda oscylacji powraca do wartości początkowej.
Amplituda
Czas
Amplituda
Czas
Pole magnetyczne
prądów wirowych
Obiekt
przewodzący
Pole
magnetyczne
cewki
Rdzeń
ferromagnetyczny
Uzwojenia
cewki
Rys. 1.2:
Obiekt metalowy w polu magnetycznym cewki z rdzeniem ferrytowym
8
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Układ elektroniczny czujnika określa odległość przedmiotu od cewki,
na podstawie stopnia tłumienia amplitudy i generuje sygnał wyjściowy.
Najczęściej jest to sygnał dwustanowy: obiekt jest w zasięgu czujnika
lub go nie ma; rzadziej analogowy – odwrotnie proporcjonalny do od-
ległości obiektu od czujnika.
Poza częścią detekcyjną w skład układu elektronicznego czujnika
wchodzi komparator z histerezą i układ wykonawczy (wyjściowy).
Dzięki histerezie unika się zakłóceń, które mogłyby się pojawić na wyj-
ściu czujnika w chwili przełączania oraz w przypadku niestabilnego po-
łożenia albo też drgań wykrywanego przedmiotu oraz zakłóceń wywo-
łanych wahaniami napięcia zasilania i temperatury otoczenia.
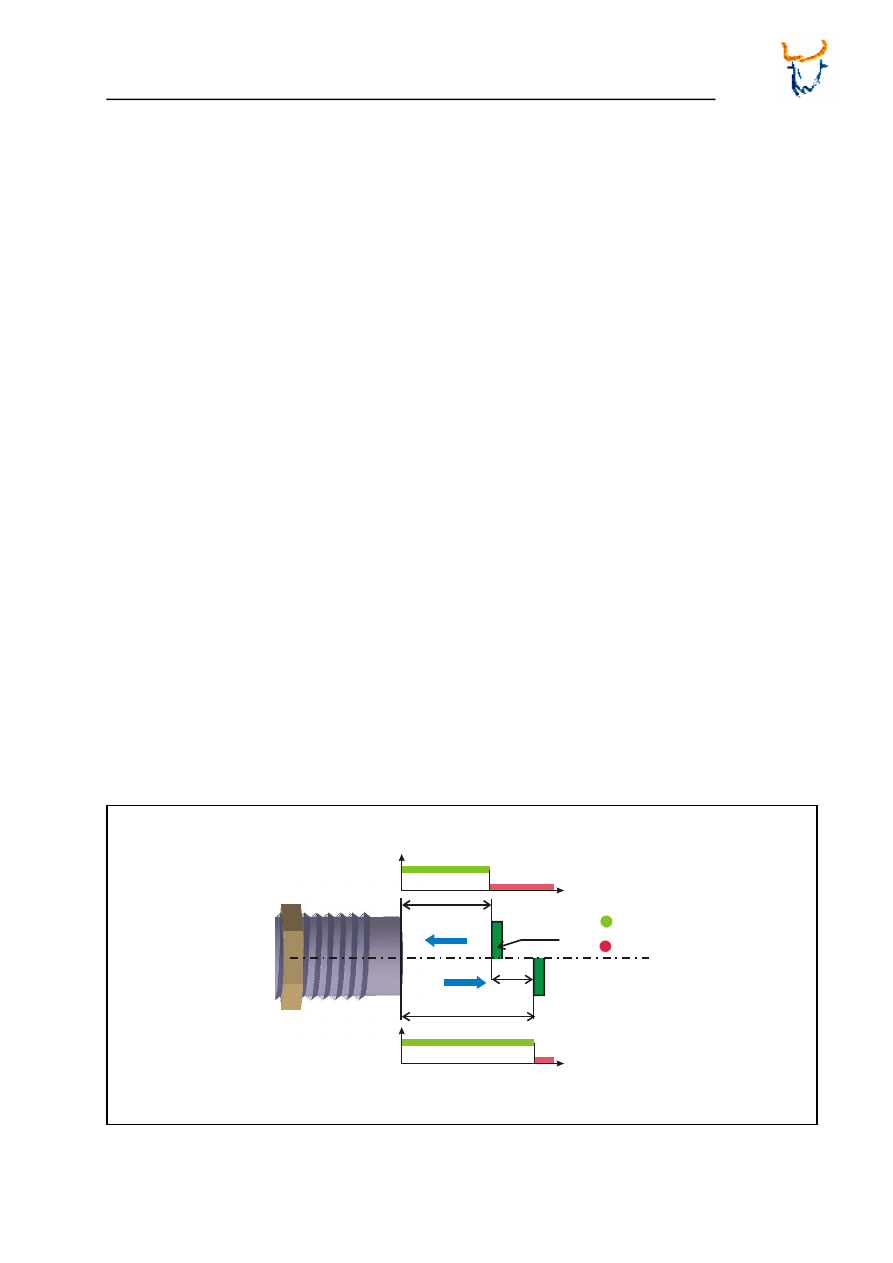
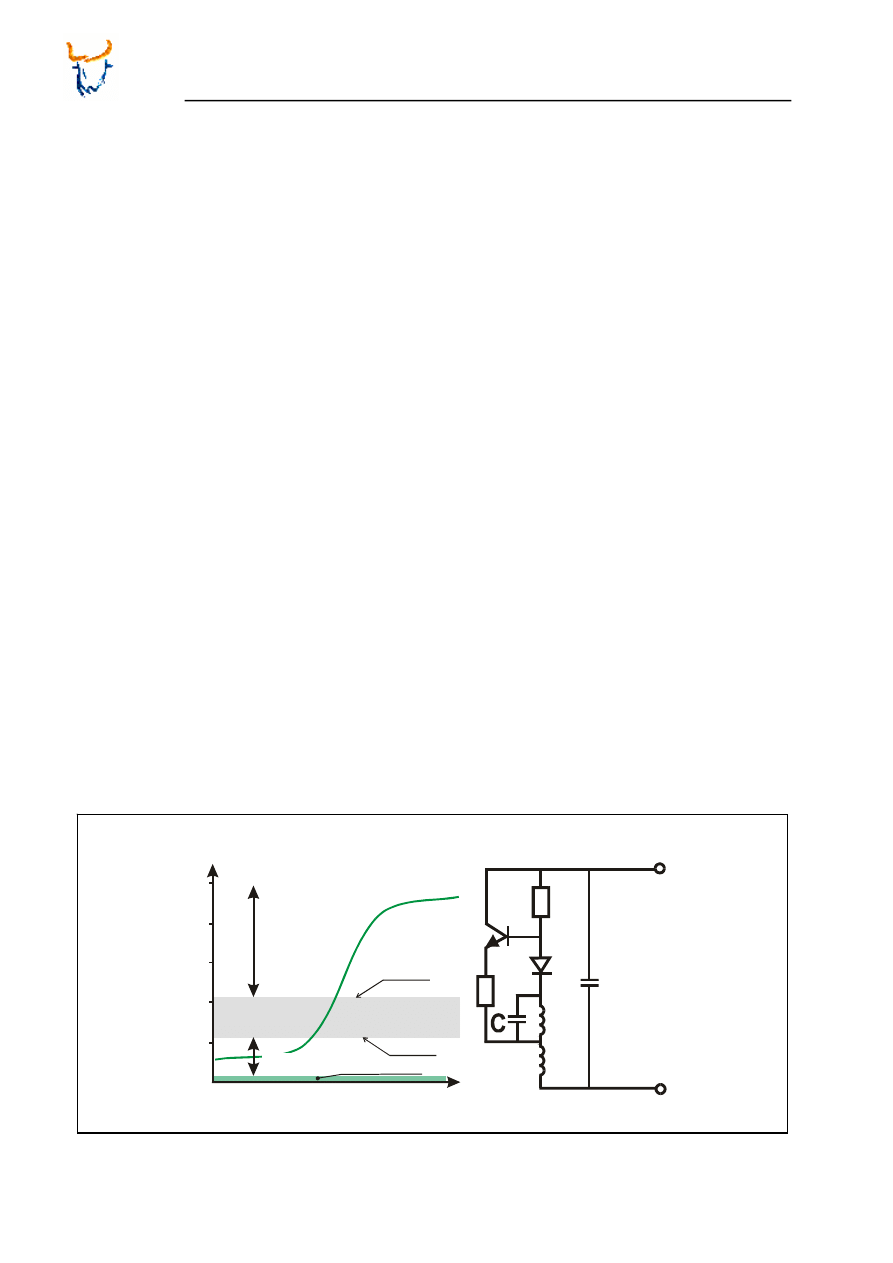
Histereza jest różnicą odległości, przy której czujnik reaguje na zbliża-
nie i oddalanie metalu od jego czoła. Wtedy stan wyjścia zmienia się
z OFF na ON lub z ON na OFF (rys. 1.3). Wartość histerezy zależy od
rodzaju i wielkości czujnika i nie przekracza 20% zakresu pomiarowe-
go. Przy jej występowaniu czujnik będzie prawidłowo pracował również
wtedy, gdy wykrywany przedmiot znajduje się na granicy strefy działa-
nia czujnika. W czujnikach wyposażonych w sygnalizacje stanu wyj-
ścia jest to sygnalizowane świeceniem diody LED.
Generatory LC w czujnikach indukcyjnych wytwarzające zmienne pole
magnetyczne, są generatorami wysokiej częstotliwości (HF) o typo-
wych zakresach 100kHz – 1 MHz. Ze wzrostem średnicy cewki zwięk-
sza się maksymalne obciążenie prądowe, lecz maleje maksymalna
częstotliwość pracy czujnika.
Zasięg działania typowych czujników indukcyjnych nie przekracza
60mm. Czujniki mają zróżnicowane obudowy zarówno cylindryczne
metalowe, jak i prostopadłościenne wykonane z tworzyw sztucznych.
Umożliwia to optymalne zamocowanie czujników w miejscach pomia-
ru.
S
n
S + H
n
ON
OFF
Metal
H
S
S
Rys. 1.3:
Histereza czujnika indukcyjnego
9
Systemy i funkcje mechatroniczne - Podręcznik
Minos
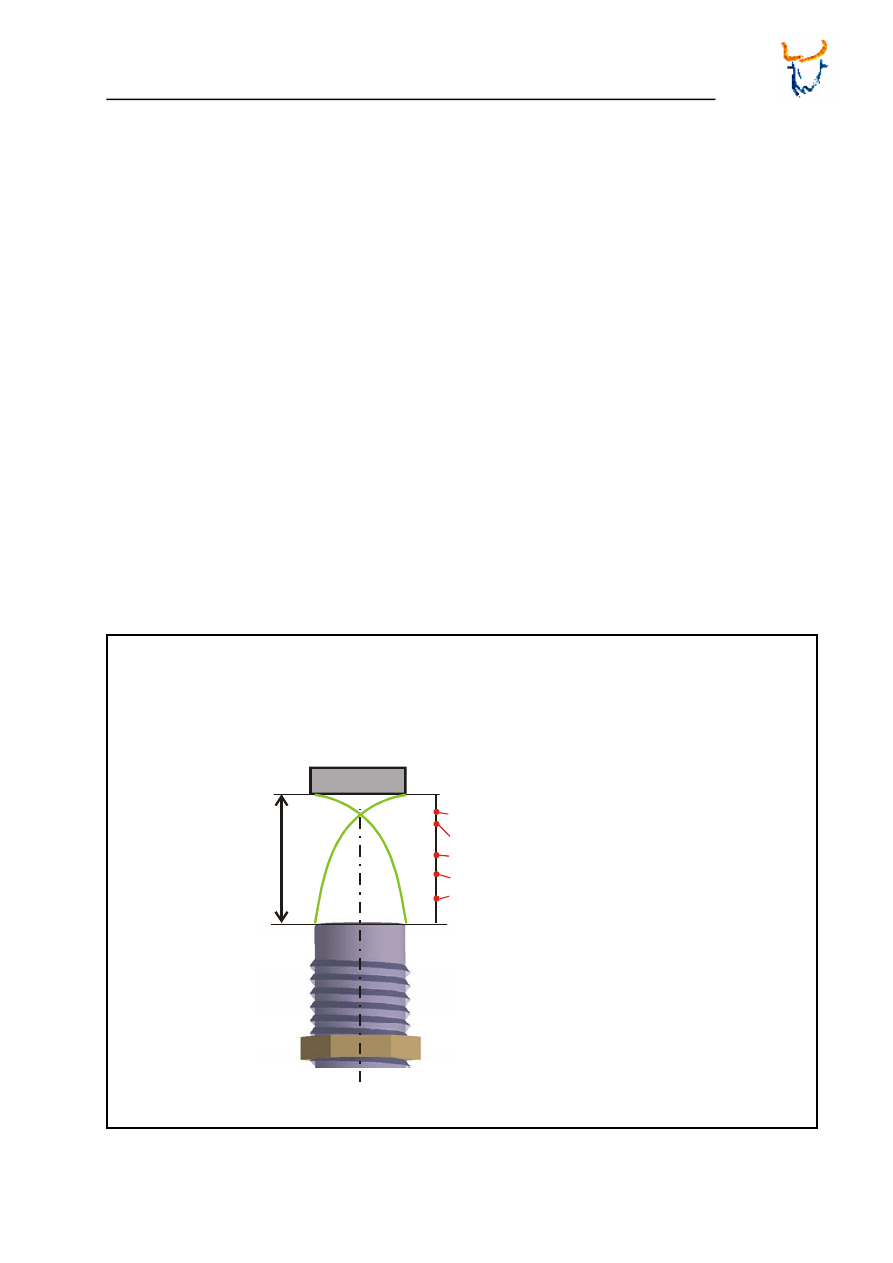
Strumień pola magnetycznego wytwarzanego przez cewkę indukcyjną
obejmuje pewien ograniczony obszar, który wyznacza maksymalny
możliwy zasięg czujnika indukcyjnego.
Odległość od czoła czujnika, przy której następuje przełączenie obwo-
du wyjściowego zdefiniowana jest jako Nominalna strefa działania
S
n
. Właśnie ta wartości podawana jest w danych katalogowych. Wy-
znacza się ją zgodnie z Normą EN 60947-5-2, dla kwadratowej płytki
stalowej (ST37) o boku równym średnicy czujnika i grubości 1mm.
Rzeczywista strefa działania S
r
ustalana w procesie wytwarzania
czujnika może odbiegać nieco od wartości S
n
. Dla nominalnego napię-
cia zasilania i nominalnej temperatury otoczenia mieści się ona w
przedziale: 0,9S
n
≤ S
r
≤ 1,1S
n
.
Dla zwiększenia pewności działania czujnika zalecaną strefą jest Stre-
fa robocza S
a
≤ 0.8S
n
. Wyznacza ona bezpieczny przedział odległości
metalu od czujnika, zapewniając prawidłową pracę w pełnym zakresie
zmian temperatury otoczenia i napięcia zasilania, niezależnie od usta-
wionej przez producenta rzeczywistej strefy działania czujnika.
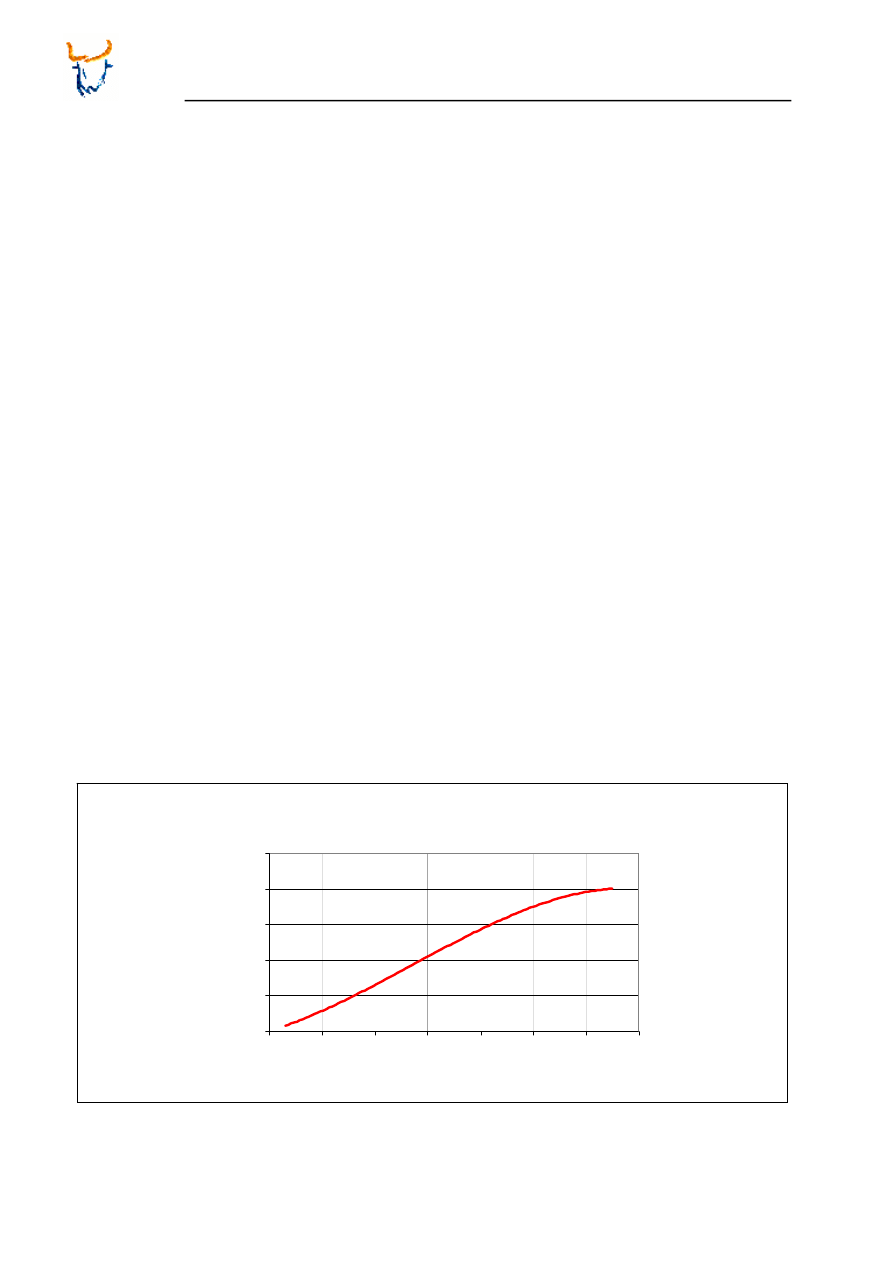
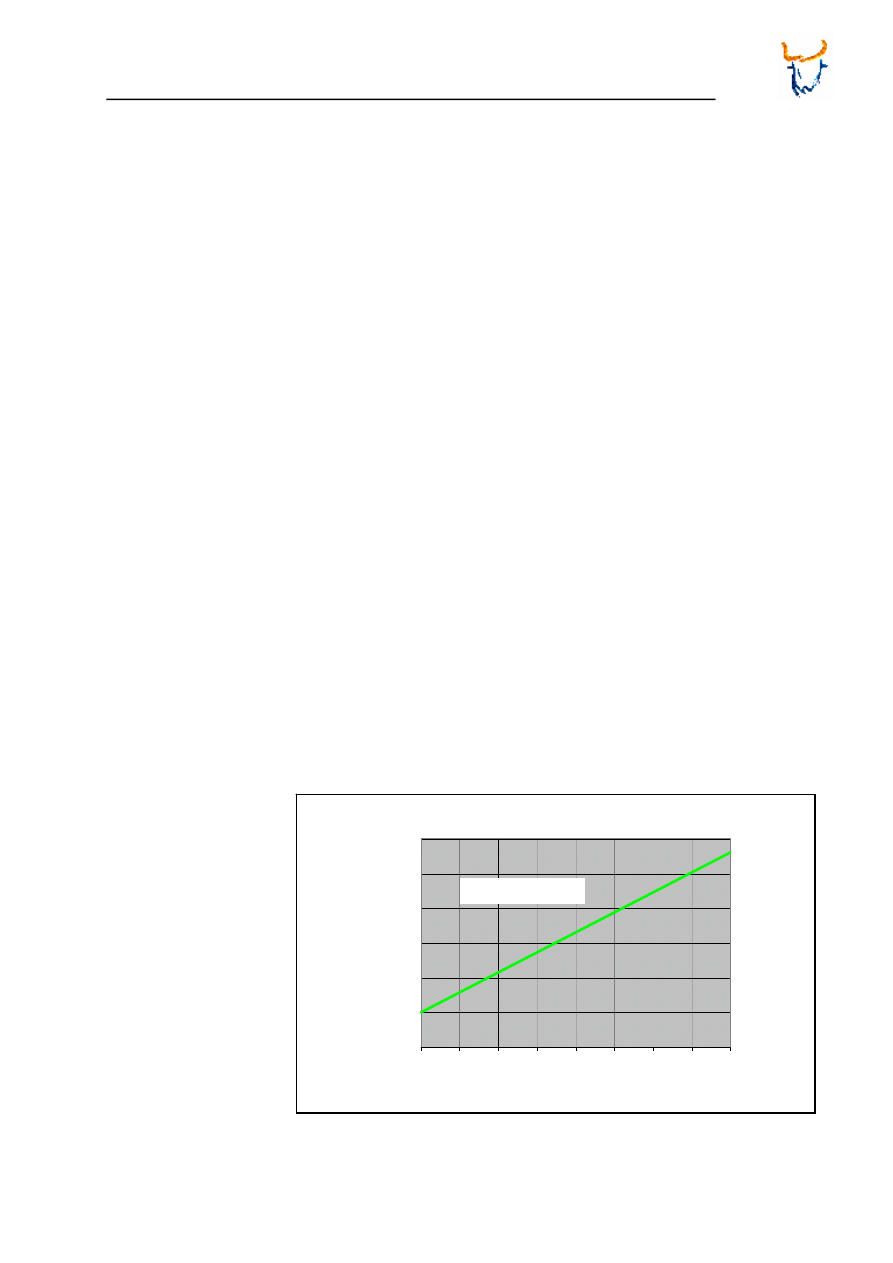
Zakres działania czujnika S
n
zależy od średnicy obudowy D, a dokład-
niej od średnicy cewki i własności rdzenia (rys. 1.4). Czujniki w małych
obudowach mają więc mniejszą strefę działania niż te o większych ga-
barytach. Są też wykonania specjalne czujników o zwiększonym za-
kresie działania.
0
10
20
30
40
50
0
10
20
30
40
50
60
70
D [mm]
Sn [
m
m
]
Rys. 1.4:
Związek pomiędzy średnicą czujnika a nominalną strefą działania standardowych
czujników indukcyjnych
10
Systemy i funkcje mechatroniczne - Podręcznik
Minos
1.3 Współczynniki korekcyjne
Przedmiot wykrywany tłumi oscylacje obwodu rezonansowego w stop-
niu zależnym od materiału, z jakiego jest wykonany. Materiały takie
jak: złoto, miedź czy aluminium, o większej przewodności elektrycznej
niż stal St37 mniej tłumią oscylacje obwodu rezonansowego.
Te różnice można skompensować zmniejszając odległość przedmiotu
od czujnika. Spowoduje to ograniczenie strefy, w której następuje wy-
krycie przedmiotu. I tak – jeżeli wykrywanym metalem jest mosiądz to
strefę działania Sn, wyznaczoną dla przedmiotu ze stali St37 należy
skorygować mnożąc ją przez współczynnik korekcyjny dla mosiądzu –
0,5 x S
n
(rys. 1.5).
Wpływ na czułość czujnika ma też jego konstrukcja. Są dwie podsta-
wowe konstrukcje czujników w obudowach cylindrycznych:
- osłonięte - cewka indukcyjna obwodu rezonansowego jest schowa-
na wewnątrz tulei tak, że czołem czujnika jest brzeg metalowej tulei
- nieosłonięte - cewka jest wysunięta i umieszczona w dodatkowym
kapturku plastikowym.
Czujniki z wysuniętą cewką charakteryzują się większą czułością i jed-
nocześnie większą wrażliwością na obecność innych obiektów meta-
lowych w ich otoczeniu.
S
n
chrom - 0,90 S
*
n
stal nierdzewna-0,75 S
*
n
mosiądz - 0,50 S
*
n
aluminium - 0,40 S
*
n
złoto - 0,22 S
*
n
stal St37
11
Rys. 1.5:
Skorygowane zakresy działania czujnika indukcyjnego dla różnych materiałów
przedmiotu wykrywanego
Systemy i funkcje mechatroniczne - Podręcznik
Minos
1.4
Sposób zabudowy
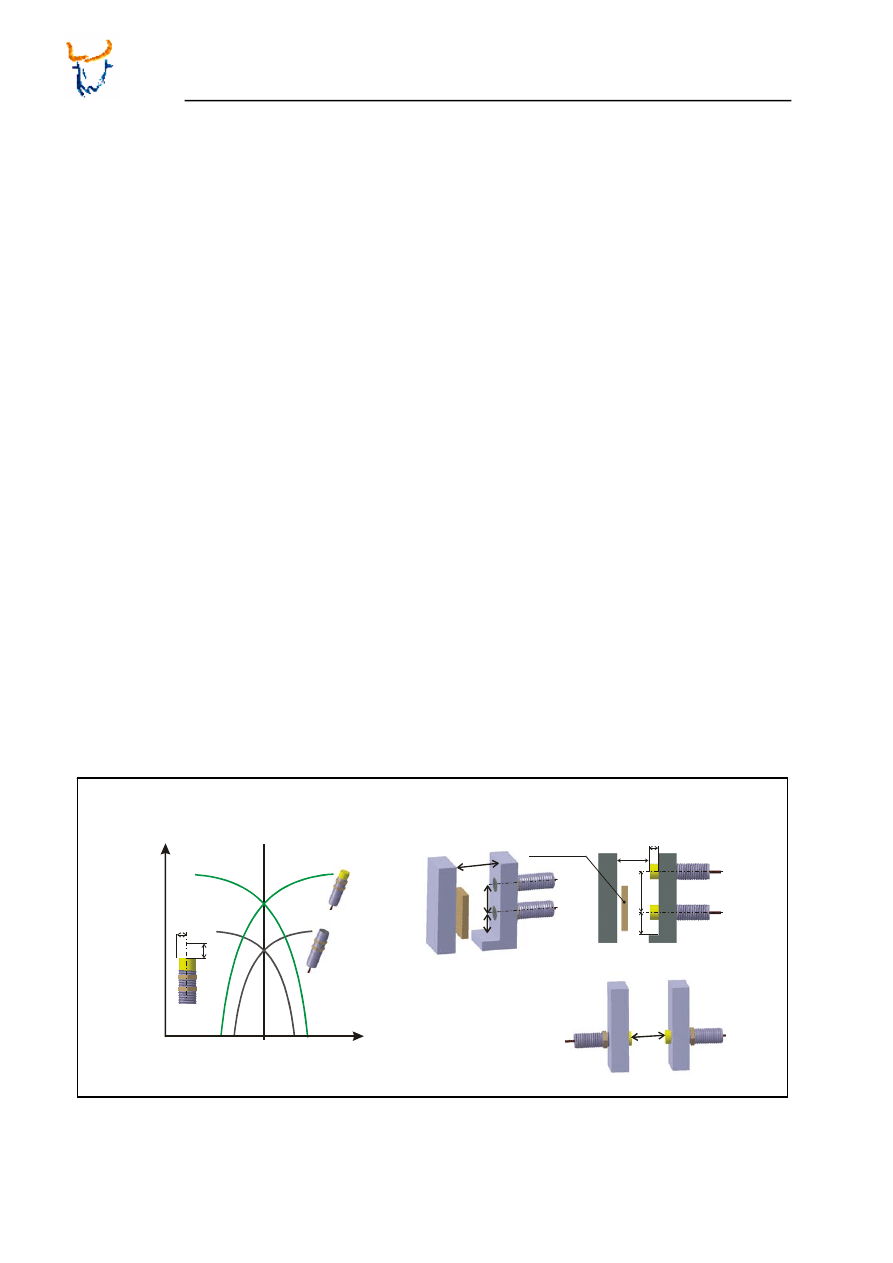
Spełnienie zaleceń montażowych pozwala uniknąć występowania za-
kłóceń w pracy czujników, powodowanych tłumiącym działaniem śro-
dowiska otaczającego czujnik lub wzajemną interferencją pomiędzy
czujnikami. Wielkość i kształt wymaganej wolnej strefy (Free zone) w
pobliżu czujnika zależy od jego strefy działania, konstrukcji i wielkości
wykrywanego przedmiotu (rys. 1.6a).
Obudowy cylindryczne w postaci metalowych tulei rzutują bezpośred-
nio na średnicę osadzanych w nich rdzeni i cewek indukcyjnych. Efek-
tem tego jest silny związek pomiędzy średnicą obudowy a strefą dzia-
łania czujnika oraz wymaganą wolną strefą, w której nie może znajdo-
wać się żaden przedmiot metalowy z wyjątkiem przedmiotu wykrywa-
nego. Czujniki o konstrukcji osłoniętej charakteryzują się większą stre-
fą działania niż czujniki nieosłonięte, więc wolna strefa wokół nich musi
być też większa.
Osłonięty czujnik cylindryczny jest niewrażliwy na otaczające go ele-
menty metalowe z wyjątkiem strefy od strony czoła czujnika. Dlatego
czujniki te mogą być osadzane w całości w elementach metalowych.
Wolną strefę od strony czoła czujnika wyznacza odległość 3Sn (rys.
1.6b). Aby uniknąć wzajemnej interferencji czujników usytuowanych
obok siebie minimalna odległość między nimi powinna być większa od
dwóch średnic D czujnika.
Nieosłonięty czujnik cylindryczny jest wrażliwy na elementy metolowe
otaczające go z trzech stron. Dlatego czujnik musi być częściowo wy-
sunięty, aby wolna strefa obejmowała również boczne powierzchnie
czujnika. W tym przypadku dla uniknięcia interferencji od sąsiednich
czujników, odległość między nimi powinna być większa niż 3xD.
a)
b)
Odległość X [mm]
O
dle
g
ło
ść
Y
[m
m
]
0
0
Y
X
Obiekt
wykrywany
3S
n
2D
8S
n
3S
n
3D
D
D
1.
5D
2S
n
Rys. 1.6:
Czujniki indukcyjne z osłoniętą i nieosłoniętą cewką: a) charakterystyki,
b) zalecenia montażowe
12
Systemy i funkcje mechatroniczne - Podręcznik
Minos
1.5.
Czujniki specjalne
1.5.1
Czujniki indukcyjne pierścieniowe
W indukcyjnych czujnikach pierścieniowych obszar aktywny znajduje
się wewnątrz pierścieniowej obudowy czujnika. Te czujniki są zapro-
jektowane tak, aby wykrywać metalowe przedmioty przechodzące
przez otwór w czujniku. Z uwagi na swoją konstrukcję są przystosowa-
ne zwłaszcza do wykrywania i zliczania małych przedmiotów metalo-
wych, takich jak: śruby, nakrętki, wkręty, lub inne małe elementy meta-
lowe przechodzące przez otwór pierścienia. Obudowy tych czujników
są plastikowe.
Zasada pracy takiego czujnika oparta jest na oscylatorze wysokiej czę-
stotliwości, który wytwarza elektromagnetyczne pole wewnątrz otworu
czujnika. Stosuje się w nich rdzenie toroidalne proszkowe o wyższym
współczynniku dobroci od rdzeni ferrytowych. Obecność przedmiotu
metalowego aktywuje czujnik powodując spadek amplitudy oscylacji.
Jest to rozpoznawane przez komparator i po przekroczeniu wartości
progowej stan wyjścia jest przełączany. Strefa działania czujnika zale-
ży od średnicy otworu czujnika oraz wielkości i rodzaju wykrywanego
metalu.
Do zainicjowania czujnika wymagany jest określony poziom tłumienia
pola magnetycznego. W przypadku zbyt małych przedmiotów poziom
wprowadzanego przez nie tłumienia może okazać się niewystarczają-
cy. Z tego powodu dla każdej wielkości czujnika istnieje minimalna
długość lub średnica wykrywanego przedmiotu, poniżej której czujnik
może nie działać poprawnie (rys. 1.7).
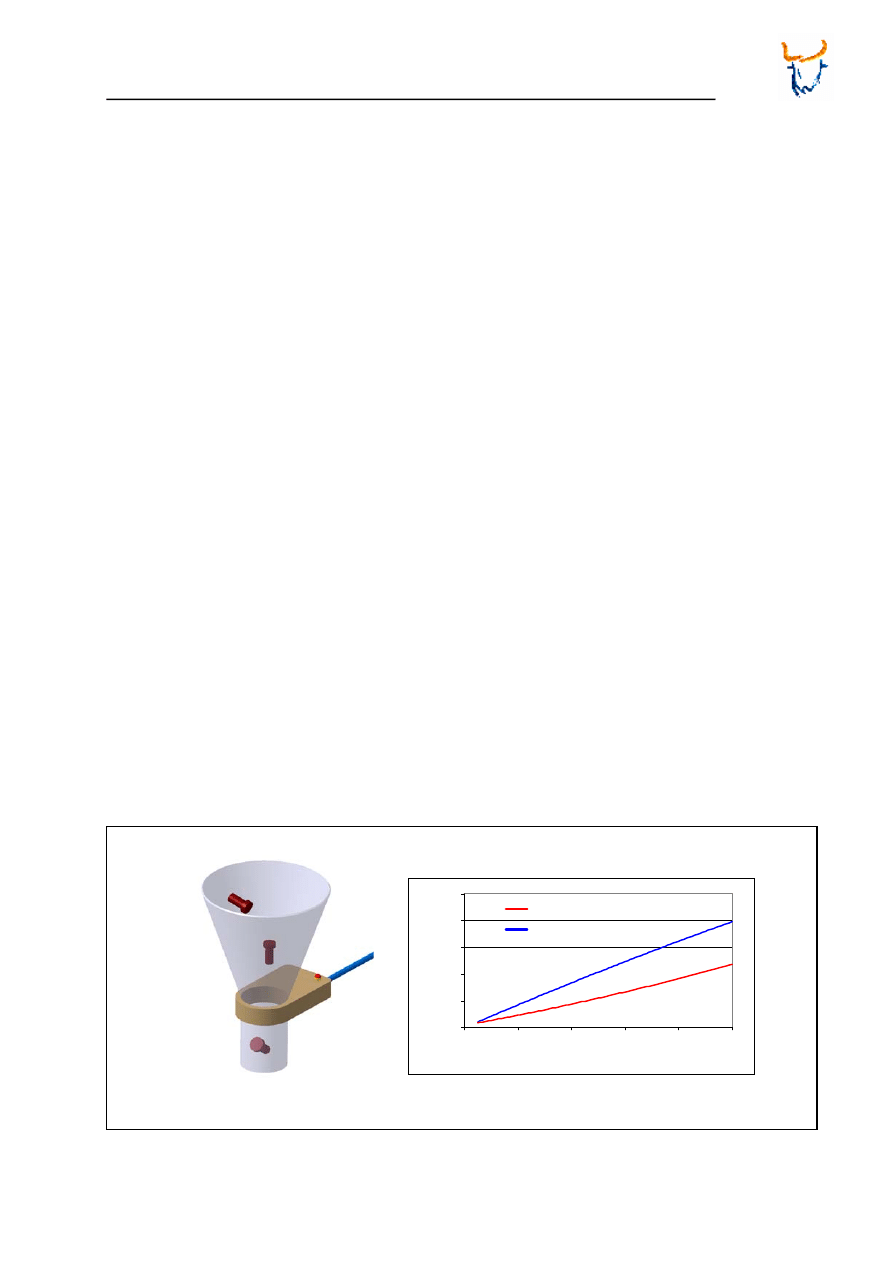
Zaletą czujników pierścieniowych jest to, że nie wymagają by wykry-
wany przedmiot poruszał się dokładnie po tej samej trajektorii. Pier-
ścieniowa aktywna powierzchnia czujnika pozwala wykrywać przed-
mioty niezależnie od ich orientacji w przestrzeni, np. spadające grawi-
tacyjnie wewnątrz rurki plastikowej.
a)
b)
0
5
10
15
20
25
0
20
40
60
80
100
Średnica otworu czujnika [mm]
Mi
n
im
al
n
a
śre
d
n
ic
a/
d
ługo
śc
p
rz
edm
io
tu
[
m
m
]
średnica
długość
13
Rys. 1.7:
Czujnik indukcyjny pierścieniowy: a) widok, b) związek między wielkością czujnika
a minimalną wielkością wykrywanego przedmiotu
Systemy i funkcje mechatroniczne - Podręcznik
Minos
1.5.2
Czujniki pracujące w silnym polu elektromagnetycznym
Procesami, którym towarzyszą silne pola elektromagnetyczne są pro-
cesy spawalnicze, wymagające dużych prądów do ich realizacji. Prąd
ten, płynąc przez przewody elektryczne oraz oprzyrządowanie spa-
walnicze, wytwarza wokół nich zmienne pole magnetyczne o dużym
natężeniu.
Umieszczenie w tej strefie czujnika indukcyjnego wiąże się z ryzykiem
niekontrolowanego przełączania stanu wyjścia, w wyniku oddziaływa-
nia pola magnetycznego na stopień nasycenia rdzenia. Drugim nega-
tywnym efektem oddziaływania silnych pól magnetycznych jest indu-
kowanie się w cewce dodatkowego napięcia. To dodatkowe napięcie
zakłóca pracę oscylatora i może spowodować przypadkowe przełą-
czenie wyjścia czujnika. Ponadto procesowi spawania nieodłącznie
towarzyszą duże ilości iskier spawalniczych, które mogą uszkodzić
obudowę czujnika, a zwłaszcza jego aktywną powierzchnię.
Z tego powodu, czujniki przeznaczone do pracy w pobliżu urządzeń
spawalniczych, wykonane są zwykle z mosiądzu pokrytego teflonem, a
ich powierzchnia czołowa chroniona jest duroplastem, odpornym na
działanie wysokiej temperatury.
Czujniki takie, aby zapobiegać przypadkom fałszywych aktywacji, mu-
szą posiadać specjalną konstrukcję układu elektronicznego oraz rdzeń
o małej przenikalności magnetycznej (rys. 1.8). Rdzenie takie wykona-
ne ze specjalnego spieku żelaznego nasycają się dopiero w strumieniu
magnetycznym o gęstości kilka razy większej niż typowy rdzeń ferry-
towy. Powoduje to większą odporność czujnika na interferencję od ze-
wnętrznych pól magnetycznych, poprzez lepsze skupiania i odpowied-
nie skierowanie własnego pola magnetycznego cewki.
Najwyższą odporność na działanie zewnętrznych pól magnetycznych
maja czujniki całkowicie pozbawione rdzenia, który w tradycyjnych
czujnikach koncentrował wokół siebie zewnętrzny magnetyzm. W ta-
kich rozwiązaniach cewki nawinięte są na niemagnetycznych szpulach
plastikowych.
Cewka
Szpula
plastikowa
Rdzeń o małej
przenikalności
Rys. 1.8
Cewki czujników indukcyjnych odpornych na silne pola magnetyczne
14

Systemy i funkcje mechatroniczne - Podręcznik
Minos
15
1.5.3
Czujniki pracujące w trudnych warunkach
Stosowanie standardowych czujników w środowisku o niestandardo-
wych parametrach zawsze stwarza możliwość wystąpienia zakłóceń w
ich pracy, a nawet trwałego uszkodzenia.
Przystosowanie czujników do pracy w specyficznych warunkach wy-
maga zwykle zastosowania specjalnych materiałów na obudowy,
zwiększenia niektórych wymiarów, opracowania specjalnych technolo-
gii montażu czujników, zapewnienia poprawnych warunków pracy
układom elektronicznym przez ich zabezpieczenie lub zmianę kon-
strukcji.
Dostosowując się do potrzeb producenci czujników proponują między
innymi:
- czujniki odporne na temperatury do 200 st C
- czujniki odporne chemicznie
- czujniki odporne na olej
- czujniki do pracy w wilgotnym środowisku
- czujniki miniaturowe o głowicach od 3-5mm
Czujniki pracujące np. w warunkach dużych ciśnień muszą posiadać
wytrzymałą i szczelną obudowę, aby zapobiec uszkodzeniom we-
wnętrznych elementów elektronicznych. Od czoła cewka i rdzeń są
chronione grubą tarczą ceramiczną, odporną na zużycie. Wymuszone
konstrukcją odsunięcie cewki od czoła czujnika skutkuje jednak
zmniejszeniem zakresu jego działania. Aby temu zapobiec niezbędne
jest dokonanie odpowiednich modyfikacji układu oscylatora. Oscylator
taki pozwalałby w normalnych warunkach uzyskiwać zakres działania
znacznie większy niż w czujnikach standardowych.
Dobrą szczelność czujnika uzyskuje się poprzez cieplne połączenie
ceramicznego czoła czujnika z metalową obudową ze stali nierdzew-
nej. Podgrzana obudowa jest nasadzana na tarczę ceramiczną i sty-
gnąc zaciska się wokół niej, tworząc wytrzymałe i szczelne połączenie.
Systemy i funkcje mechatroniczne - Podręcznik
Minos
1.6
Czujniki NAMUR
Czujniki indukcyjne NAMUR są 2-przewodowymi czujnikami, których
wewnętrzna rezystancja zmienia się w wyniku wykrycia metalu. Mała
rezystancja czujnika odpowiada sytuacji – „brak przedmiotu metalowe-
go”, a duża rezystancja – „przedmiot metalowy wykryty”. Czujniki te
współpracują z zewnętrznymi wzmacniaczami.
Czujniki NAMUR charakteryzują się ściśle określonym obszarem do-
puszczalnym prądu wyjściowego, wynoszącym zgodnie z normą EN
60947-5-6 (dawniej EN 50227) od 1,2 do 2,1 mA (rys. 1.9). Wszystkie
czujniki NAMUR, zasilane ze wzmacniacza prądu stałego, maja taką
samą charakterystykę prądową i cechują się ściśle określoną histerezą
przełączania równa 0,2mmA.
Składają się one z oscylatora mającego wytłumioną cewkę oraz de-
modulatora. Zmiana odległości między przedmiotem wykrywanym a
czujnikiem przetwarzana jest na zmianę pobieranego prądu, którą
wzmacniacz zewnętrzny zamienia na sygnał dwustanowy.
Czujniki NAMUR mogą pracować w instalacjach przeciwwybuchowych
lub w strefach zagrożonych wybuchem (strefa I lub II), tylko w połą-
czeniu z iskrobezpiecznym wzmacniaczem przełączającym. Możliwa
jest też współpraca tych czujników ze wzmacniaczami niespełniający-
mi norm bezpieczeństwa (wzmacniacze przekaźnikowe), lecz wów-
czas wzmacniacz musi być umieszczony poza strefą zagrożoną wybu-
chem.
Prąd w obwodzie czujnika mniejszy od 0,15mA traktowany jest przez
wzmacniacz zewnętrzny jako brak sygnału, a prąd większy od 6mA
jako zwarcie w czujniku.
a)
b)
+
_
1
2
3
4
5
2,1mA
1,2mA
I<=6mA - maksymalny prąd
P
rą
d [
m
A
]
S [mm]
L
1
L
2
Obszar
dopuszczalny
Brak
tłumienia
Tłumienie Rozłączenie
Rys. 1.9:
Czujnik typu NAMUR a) charakterystyka, b) obwód elektryczny
16
Systemy i funkcje mechatroniczne - Podręcznik
Minos
1.7
Analogowe czujniki indukcyjne
Inaczej niż w konwencjonalnych czujnikach, w których rejestrowane są
tylko stany wykrycia przedmiotu lub jego nie wykrycia, indukcyjne
czujniki z wyjściem analogowym rejestrują położenie przedmiotu w ca-
łym zakresie pomiarowym czujnika. Zmianie położenia przedmiotu z
odległości równej S
n
do zera, odpowiada zmiana sygnału wyjściowego
od 0 do 20 mA.
Czujniki z wyjściem analogowym działają w podobny sposób jak czuj-
niki zbliżeniowe. Zmienne pole magnetyczne emitowane przez układ
rezonansowy jest tłumione przez metalowy przedmiot znajdujący się w
polu działania czujnika. Tłumienie to staje się silniejsze w miarę zbli-
żania się przedmiotu do czoła czujnika.
Specjalnie zaprojektowany oscylator pozwala tłumić obwód rezonan-
sowy wraz ze zmianą odległości, czyli ze zmianą współczynnika do-
broci. Przetworzone zostaje to na sygnał wyjściowy, który dzięki ukła-
dowi linearyzacji jest w przybliżeniu liniowy (rys. 1.10).
Krzywe i liczby na wykresie oparte są na przedmiocie ze stali St37,
ponieważ ta stal daje największy zasięg wykrywania (rys. 1.10). Dla
metali o innej przenikalności magnetycznej należy posłużyć się wła-
ściwymi dla nich współczynnikami korekcyjnymi.
Większość obecnie dostępnych czujników ma praktycznie liniową cha-
rakterystykę w całym zakresie pomiarowym (obszar zaznaczony na ry-
sunku).
UKŁAD
WYJŚCIOWY
UKŁAD
LINEARYZACJI
UKŁAD
GENERATORA
GŁOWICA
CZUJnIKA
L
C
I = 0-20mA
A
St 37
Al
Pr
ąd [mA
]
S [mm]
0
1
2
3
5
6
4
Rys. 1.10:
Analogowy czujnik z wyjściem indukcyjnym
17

Systemy i funkcje mechatroniczne - Podręcznik
Minos
18
1.8
Zasilanie czujników
Czujniki zasilane prądem stałym współpracują najczęściej z zasila-
czami, których napięcie wyjściowe jest napięciem tętniącym. Zbyt duże
wahania amplitudy chwilowych wartości tego napięcia mogą spowo-
dować nieprzewidywalne zachowanie czujnika indukcyjnego.
Dla zapewnienia prawidłowej pracy, wahania napięcia zasilającego
muszą być utrzymane w zakresie nieprzekraczającym 10% średniej
wartości napięcia zasilania. Spełniony musi być zatem warunek:
U
ss
≤ 0.1U
D
Podany zakres nie może zostać przekroczony nawet przez chwilowy
skok napięcia U
ss
. W celu uniknięcia tego zjawiska zalecane jest sto-
sowanie zasilacza stabilizowanego lub większego kondensatora wy-
gładzającego napięcie.
Wyjścia czujników zasilanych prądem stałym wykonywane są w konfi-
guracji NPN lub PNP. Dla konfiguracji NPN oznacza to, że obciążenie
R
L
włączane jest pomiędzy wyjściem czujnika a plus (+) zasilania U, a
dla PNP pomiędzy wyjściem a minus (-) zasilania U. Każde z tych
dwóch typów wyjść wykonywane jest z funkcją wyjściową NO (normal-
nie otwarty) lub funkcją NC (normalnie zamknięty). Część czujników
wykonywana jest także z funkcją wyjściową NP (komplementarną), o
dwóch niezależnych wyjściach NO i NC.
Czujniki indukcyjne w wersji AC (zasilane prądem przemiennym) nie
mogą być podłączane bezpośrednio do zasilacza prądu zmiennego.
Takie podłączenie może spowodować zniszczenie wewnętrznych
układów elektronicznych czujnika.
W przypadku czujników zasilanych prądem przemiennym, łączy się je
szeregowo z obciążeniem R
L
. Stosowanie czujników dwuprzewodo-
wych, zasilanych prądem przemiennym wiąże się z wystąpieniem do-
datkowych wymagań i ograniczeń stawianych zewnętrznym obwodom
elektrycznym.
Oprócz oscylatora, 2-przewodowe czujniki prądu zmiennego posiadają
tranzystor jako wzmacniacz mocy. Te czujniki są bezpośrednio połą-
czone w szereg z obciążeniem. Efektem tego jest pozostanie w obwo-
dzie pewnego prądu (prądu upływu), mimo że czujnik znajduje się w
stanie rozłączonym. Wymusza to również pewien spadek napięcia za-
silania czujnika. Zjawiska te są szczególnie istotne przy szeregowym i
równoległym łączeniu tych czujników.
Dobierając warunki zasilania czujników prądu zmiennego należy bez-
względnie przestrzegać, podawanych przez ich producentów, wartości
prądu obciążenia, zarówno maksymalnego jak i minimalnego.
Systemy i funkcje mechatroniczne - Podręcznik
Minos
1.9
Zasady łączenia czujników
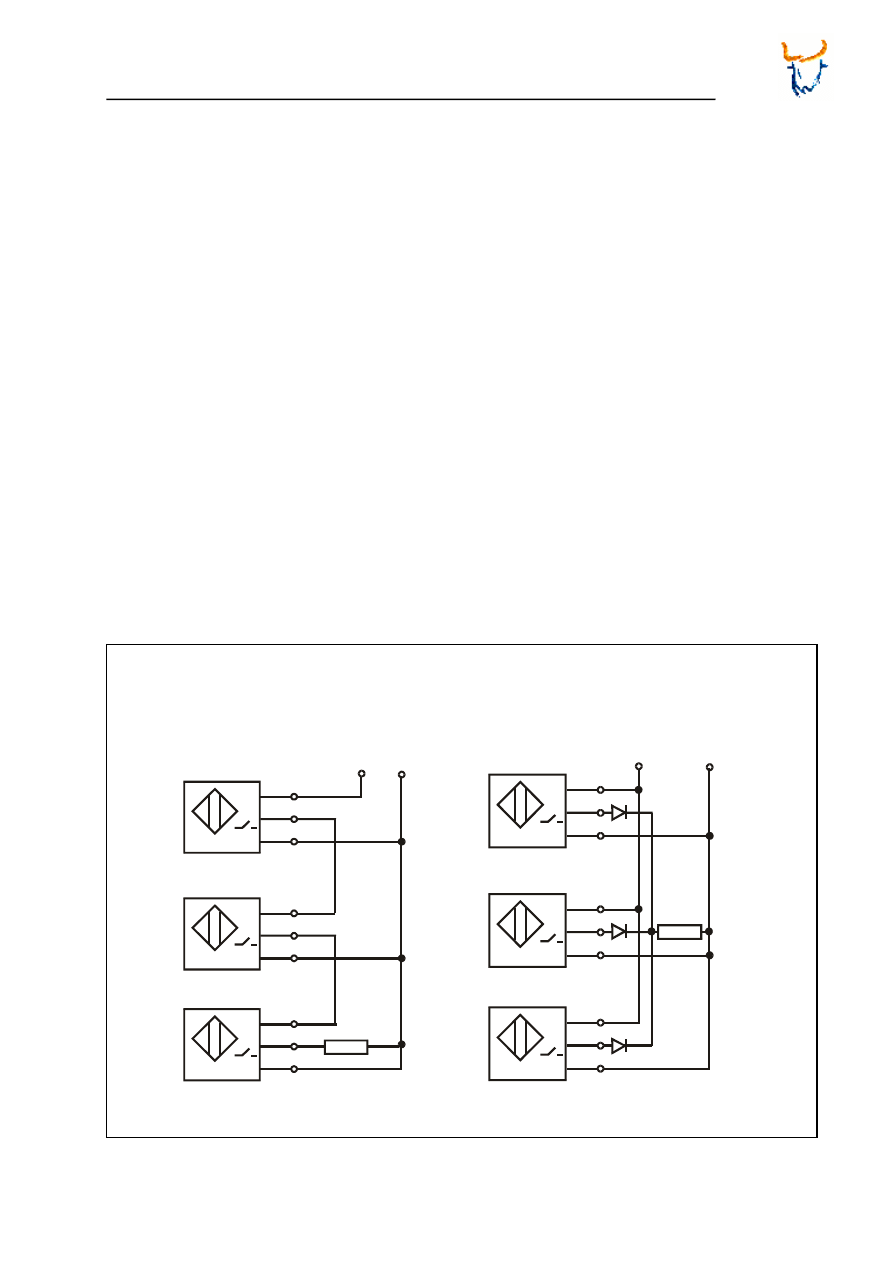
Szeregowe lub równolegle łączenie kilku czujników stwarza możliwość
realizacji różnych strategii funkcjonowania urządzeń, które mogą być
włączone w obwodzie zewnętrznym jako obciążenie (rys. 1.11). W wy-
niku odpowiedniego łączenia czujników mogą być realizowane funkcje
logiczne, takie jak AND lub NOR.
Funkcja logiczna AND gwarantuje, że sygnał wyjściowy z grupy czujni-
ków pojawi się tylko wtedy, gdy każdy czujnik w grupie zmieni stan
swojego wyjścia z OFF na ON.
Funkcja NOR powoduje przerwanie obwodu zasilającego obciążenie
R
L
, które nastapi tylko wdedy, gdy wszystkie czujniki w grupie zmienią
swój stan z ON na OFF.
Grupy czujników o różnych funkcjach wyjściowych mogą być łączone
szeregowo w celu realizacji innych zależności logicznych.
Maksymalna liczba połączonych szeregowo czujników zależy od wiel-
kości napięcia zasilania, spadków napięć na wyjściu czujników i para-
metrów dołączonego obciążenia. Napięcie zasilania układu, pomniej-
szone o sumę spadków napięć na wyjściu czujników, musi być zawsze
wyższe od minimalnego napięcia pracy przy dołączonym obciążeniu.
R
L
-
+
-
+
-
+
-
+
DC
R
L
-
+
-
+
-
+
-
+
DC
Rys. 1.11:
Łączenie szeregowe i równoległe czujników w grupy (funkcja logiczna AND i OR)
19
Systemy i funkcje mechatroniczne - Podręcznik
Minos
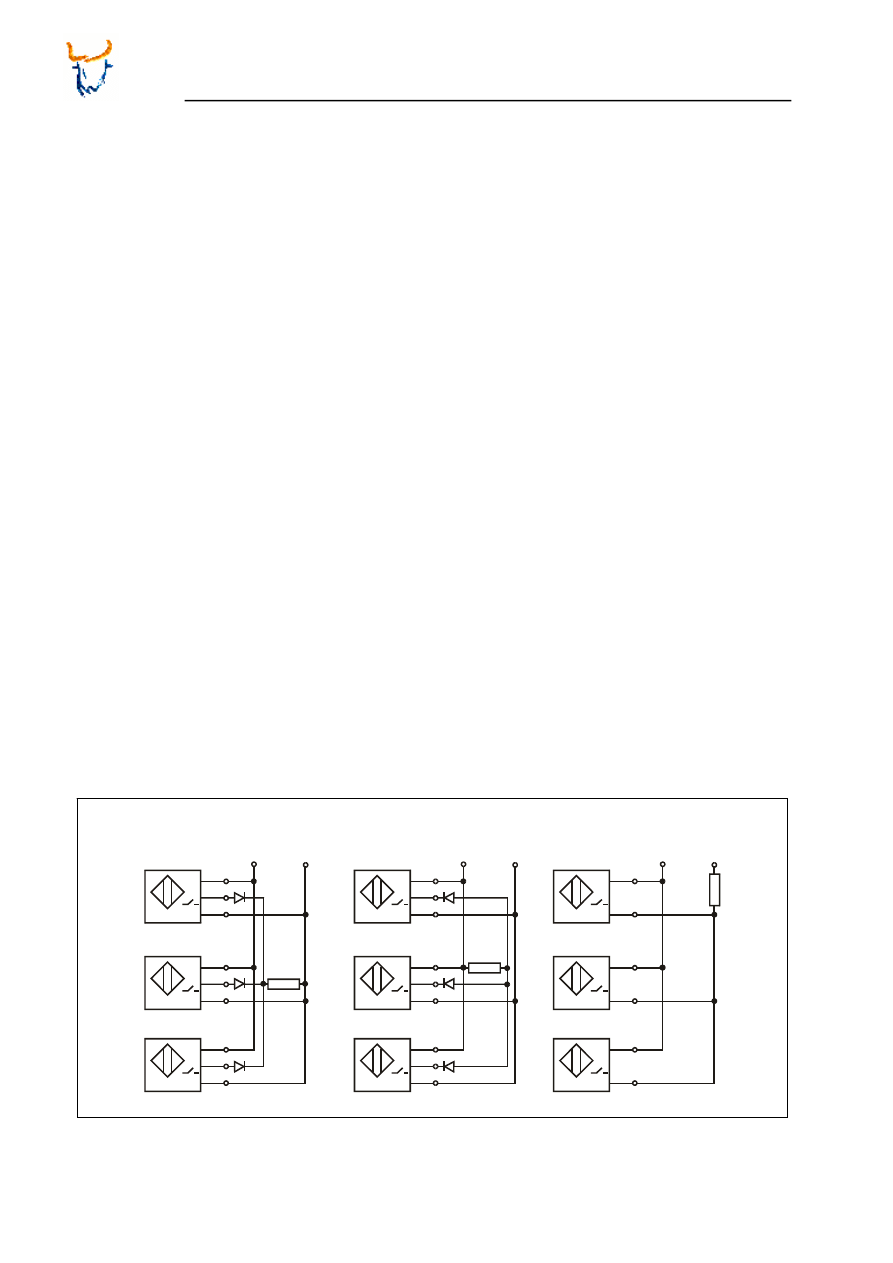
Funkcja OR powoduje pojawienie się sygnału wyjściowego, gdy cho-
ciaż jeden czujnik w grupie zmieni stan swojego wyjścia. Realizują ją
grupy czujników połączone równolegle (rys. 1.12).
Dla równolegle połączonych czujników trójprzewodowych zasilanych
prądem stałym nie ma istotnych ograniczeń ilościowych. Można rów-
nolegle łączyć wyjścia nawet kilkunastu czujników, niezależnie od typu
funkcji wyjściowej.
W przypadku połączenia równoległego czujników dwuprzewodowych,
prądy upływu wszystkich czujników w grupie mogą się sumować, co
niekorzystnie wpływa na poprawność pracy układu.
Z tego względu raczej nie zaleca się równoległego łączenia czujników
dwuprzewodowych, chociaż nie wyklucza się takiej możliwości. Mak-
symalna ich liczba w grupie zależy od rodzaju obciążenia oraz sumy
prądów upływu płynących przez obwód wyjściowy czujników.
R
L
-
+
-
+
-
+
-
+
R
L
-
+
-
+
-
+
-
+
DC
AC
DC
R
L
Rys. 1.12:
Łączenie równoległe czujników w grupy (funkcja logiczna OR)
20
Systemy i funkcje mechatroniczne - Podręcznik
Minos
1.10
Zabezpieczenia i bezpieczeństwo czujników
Jedną z ważniejszych cech czujników jest możliwość zabezpieczania
się przed błędami instalacyjnymi i awariami podczas eksploatacji. Słu-
żą do tego elementy zabezpieczeń elektrycznych, chroniących układy
wewnętrzne czujnika. W większości czujników stałoprądowych wyjścia
zabezpieczone są przed skutkami następujących niepożądanych zja-
wisk lub działań:
- odwrotnego podłączenia napięcia zasilania,
- przepięć na wyjściu, powstających przy wyłączaniu obciążeń,
- wystąpieniem krótkich i niecyklicznych impulsów od strony zasilania,
- przekroczenia dopuszczalnego prądu wyjściowego lub zwarcia.
Zwarcia w obwodzie elektrycznym z czujnikami stałoprądowymi nie
powodują uszkodzenia czujnika. Mogą one występować wielokrotnie i
przez dłuższy okres czasu. Podczas zwarcia nie działają diody w czuj-
niku, a po jego usunięciu czujnik pracuje poprawnie.
Czujniki w obudowach metalowych, jeśli są zasilane napięciami nie-
bezpiecznymi dla zdrowia człowieka, wymagają dodatkowego przewo-
du uziemiającego.
Kiedy czujnik zbliżeniowy jest w stanie niewłączonym (OFF), w obwo-
dzie pojawia się prąd upływu (rys. 1.13). Może to spowodować jego
nieprawidłową pracę czujnika, np. trwałe pozostawanie w stanie OFF.
Aby zapobiec takim zjawiskom stosuje się dodatkowy rezystor R
P
,
włączony równolegle do obciążenia. Odprowadza on prąd upływu tak,
aby prąd płynący przez obciążenie był mniejszy niż minimalna wartość
prądu wymagana przez obciążenie. Wartość rezystancji R
P
i moc P te-
go rezystora można wyznaczyć z zależności:
R
P
=U/I
min
P=U
2
/R
P
Napięcie zasilania [V]
Pr
ą
d u
pł
yw
u [
m
A]
1.0
1.5
0
0.5
100
200
R
P
R
L
Rys. 1.13:
Prąd upływu w obwodzie z czujnikiem indukcyjnym zasilanym prądem przemien-
nym
21
Systemy i funkcje mechatroniczne - Podręcznik
Minos
1.11 Podłączanie czujników do sieci komunikacyjnych
Sieci komunikacyjne są najnowocześniejszym rozwiązaniem komuni-
kacji między czujnikami a urządzeniami sterującymi. Zastępują one do-
tychczas stosowane rozwiązania klasyczne, charakteryzujące się dużą
liczbą przewodów, prowadzonych często na znaczne odległości do
układów sterujących.
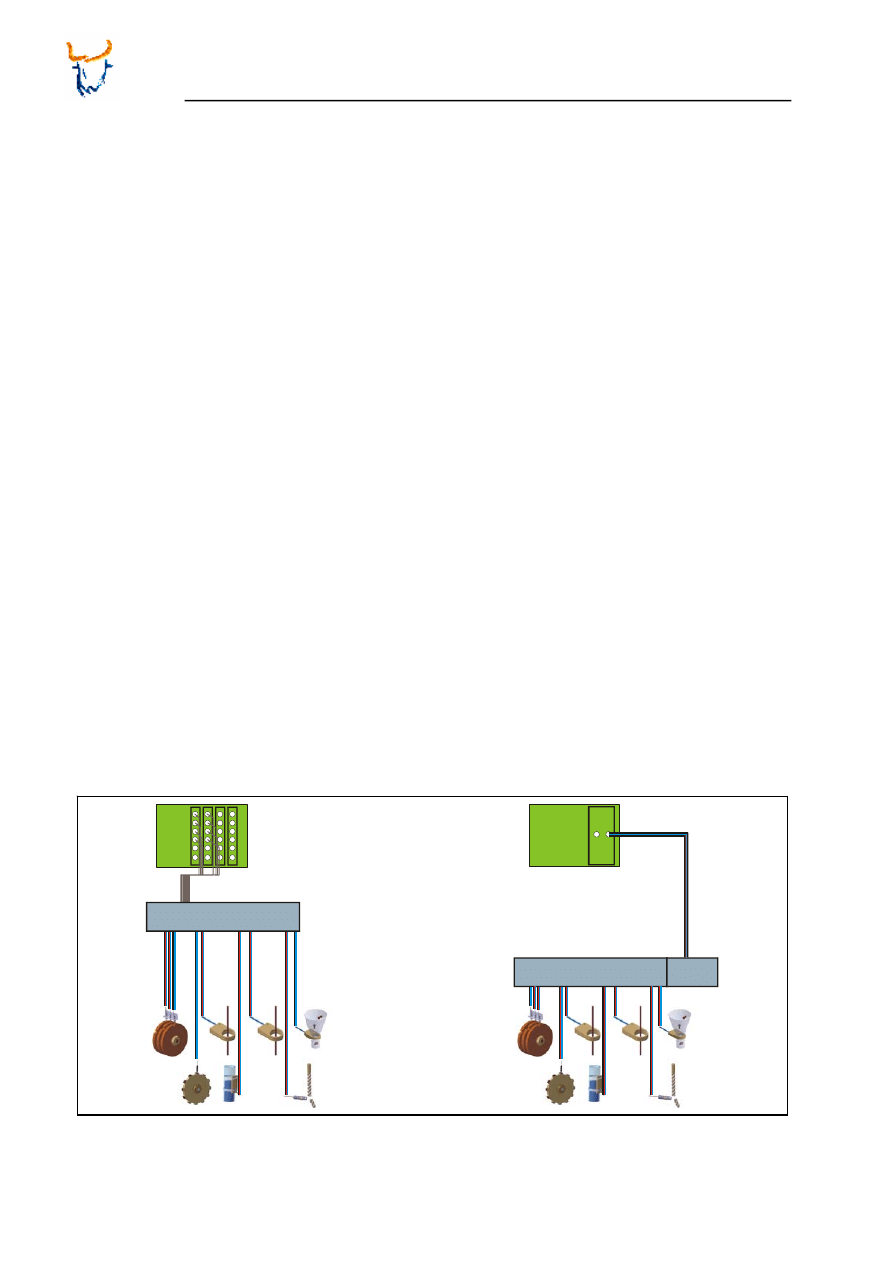
Koncepcja zastosowania rozwiązań sieciowych polega na zbieraniu
sygnałów przez urządzenia pośrednie, stanowiące węzły sieci i przesy-
łaniu ich przy użyciu magistrali do jednostki nadrzędnej (Rys. 1.14).
Pozwala to:
- znacznie obniżyć koszty,
- zwiększyć odległość między czujnikiem i sterownikiem,
- przesyłać dane dotyczące kalibracji i charakterystyki czujnika.
Największą popularnością cieszą się sieci otwarte, czyli takie, które
pozwalają na wymianę informacji między urządzeniami różnych do-
stawców według standaryzowanych zasad. Najczęściej wykorzystywa-
ne standardy przemysłowe (protokoły komunikacji) to: Ethernet, Profi-
bus, DeviceNet, Modbus, CAN, AS-I.
Dzięki sieciom powstają rozproszone systemy sterowania, pozwalają-
ce przenieść część procesu przetwarzania sygnałów na niższe pozio-
my sytemu, czyli bliżej procesu.
Podstawowymi urządzeniami sieciowymi są moduły wejść/wyjść (I/O)
wyposażone w interfejsy do określonych typów sieci. Moduł jest wi-
dziany przez jednostkę nadrzędną pod jednym adresem sieciowym i
pozwala na transmisję danych z dużą prędkością. Jest to szczególnie
istotne dla sieci na poziomie urządzeń i czujników, gdzie realizowane
jest często złożone przetwarzanie sygnałów, a czasy podejmowania
decyzji muszą być krótkie.
Analogowe
i cyfrowe
moduły I/O
PLC
Kabel
wieloprzewodowy
Skrzynka
przyłączeniowa
Kabel
3-przewodowy:
zasilanie,
sygnał,
GND
Skrzynka
przyłączeniowa
Kabel
2-przewodowy
Karta AS-I
PLC
AS- I
Rys. 1.14:
Uproszczona struktura systemu komunikacji bez sieci i z siecią
22
Systemy i funkcje mechatroniczne - Podręcznik
Minos
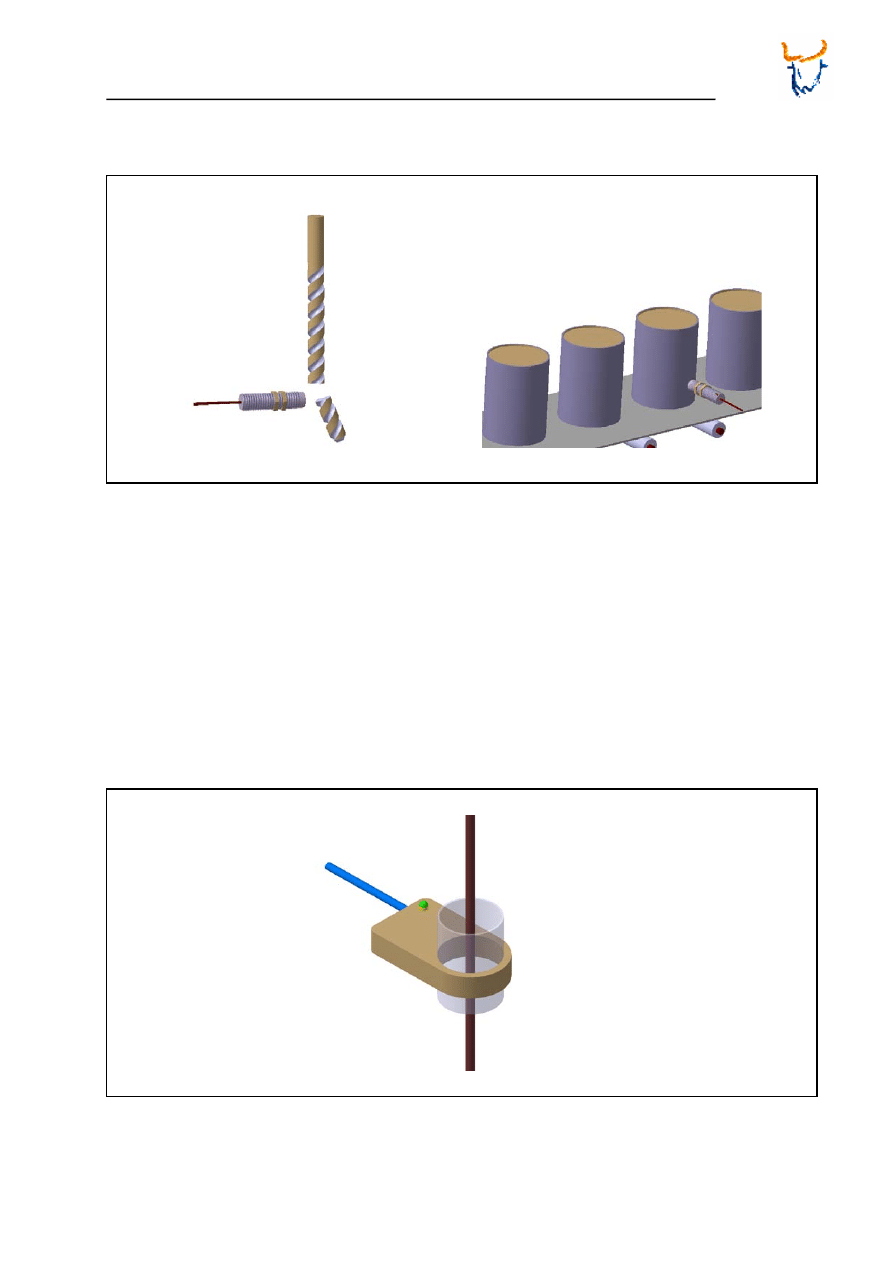
1.12 Aplikacje
Rys. 1.15:
Wykrywanie złamania wiertła i obiektów na taśmie
Rys. 1.16:
Kontrola ciągłości drutu
23
Systemy i funkcje mechatroniczne - Podręcznik
Minos
2. Czujniki
pojemnościowe
2.1
Informacje podstawowe
Czujniki pojemnościowe wykorzystują pole elektryczne do wykrywania
obiektów znajdujących się w zasięgu ich działania. W odróżnieniu od
czujników indukcyjnych mogą one, oprócz obiektów metalowych wy-
krywać, obiekty nieprzewodzące np. tworzywa sztuczne. Czujnik po-
jemnościowy jest także w stanie reagować na obiekty znajdujące się
za nieprzewodzącą warstwą, co czyni go klasycznym czujnikiem do
wykrywania obecności płynów czy granulatu poprzez ścianki pojemni-
ka. Są one używane zazwyczaj jako czujniki zbliżeniowe, choć mogą
generować również sygnał proporcjonalny do odległości przedmiotu od
czoła czujnika. Odległość działania tych czujników jest stosunkowo
mała, w zakresie do 30mm, chociaż zdarzają się one w wykonaniu
specjalnym do 60mm.
Reagują one przełączeniem stanu wyjścia ON/OFF lub OFF/ON wów-
czas, gdy w polu elektrycznym czujnika, wystarczająco blisko jego czo-
ła, pojawi się przedmiot metalowy lub dielektryk.
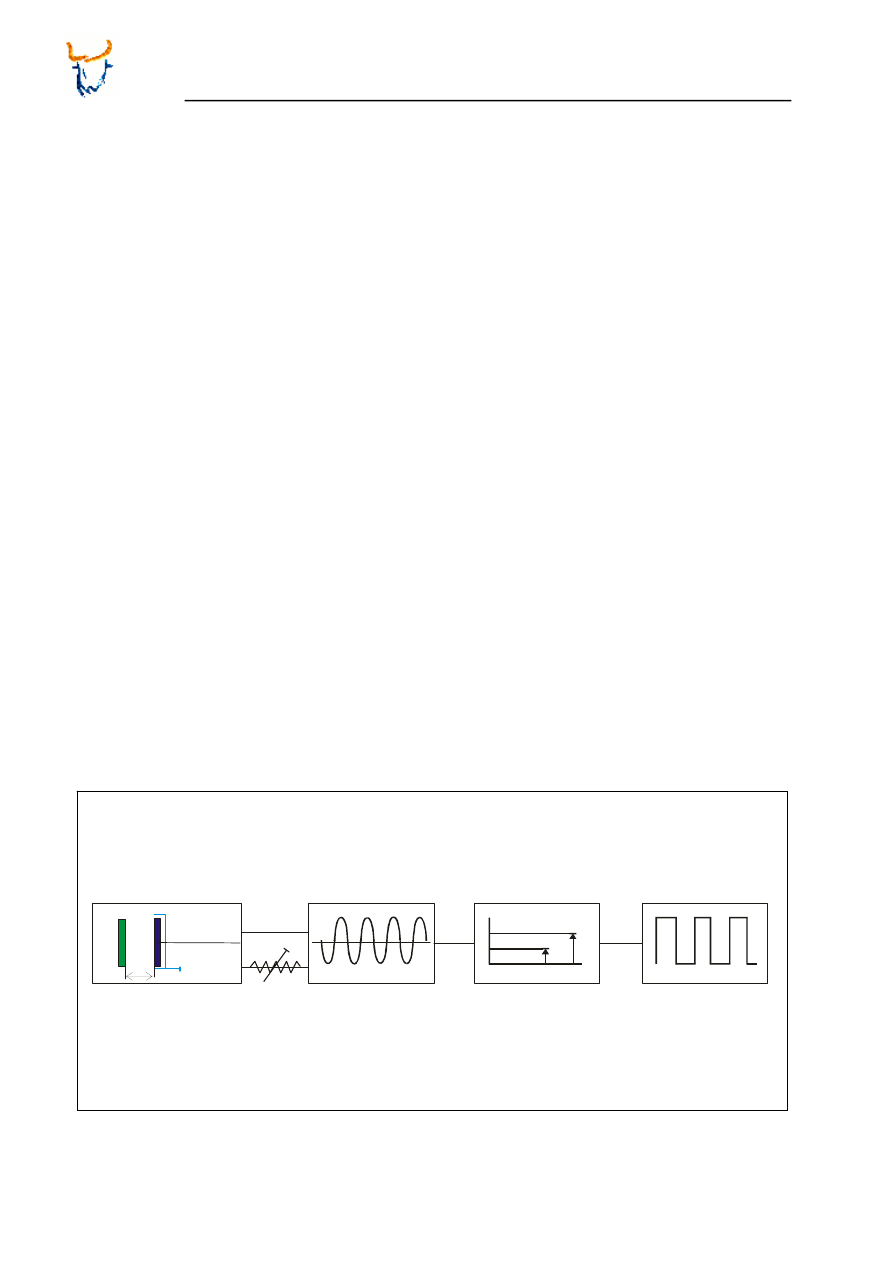
Głównymi składnikami czujnika pojemnościowego są: głowica z elek-
trodami, potencjometr P, oscylator, układ detekcji i układ wyjściowy
(rys. 2.1).
Aktywnymi elementami czujnika pojemnościowego są dwie metalowe
elektrody, tworzące kondensator otwarty. Gdy obiekt zbliża się do
czujnika to jego pojemność zmienia się. Całkowita pojemność konden-
satora, od której zależy poziom sygnału wyjściowego, jest sumą pod-
stawowej pojemności czujnika i zmiany pojemności, spowodowanej
działaniem obiektu wykrywanego.
UKŁAD
WYJŚCIOWY
UKŁAD
DETEKCJI
UKŁAD
OSCYLATORA
GŁOWICA
CZUJNIKA
S
OBIEKT
ELEKTRODY
CZUJNIKA
P
Rys. 2.1: Schemat blokowy czujnika pojemnościowego
24
Systemy i funkcje mechatroniczne - Podręcznik
Minos
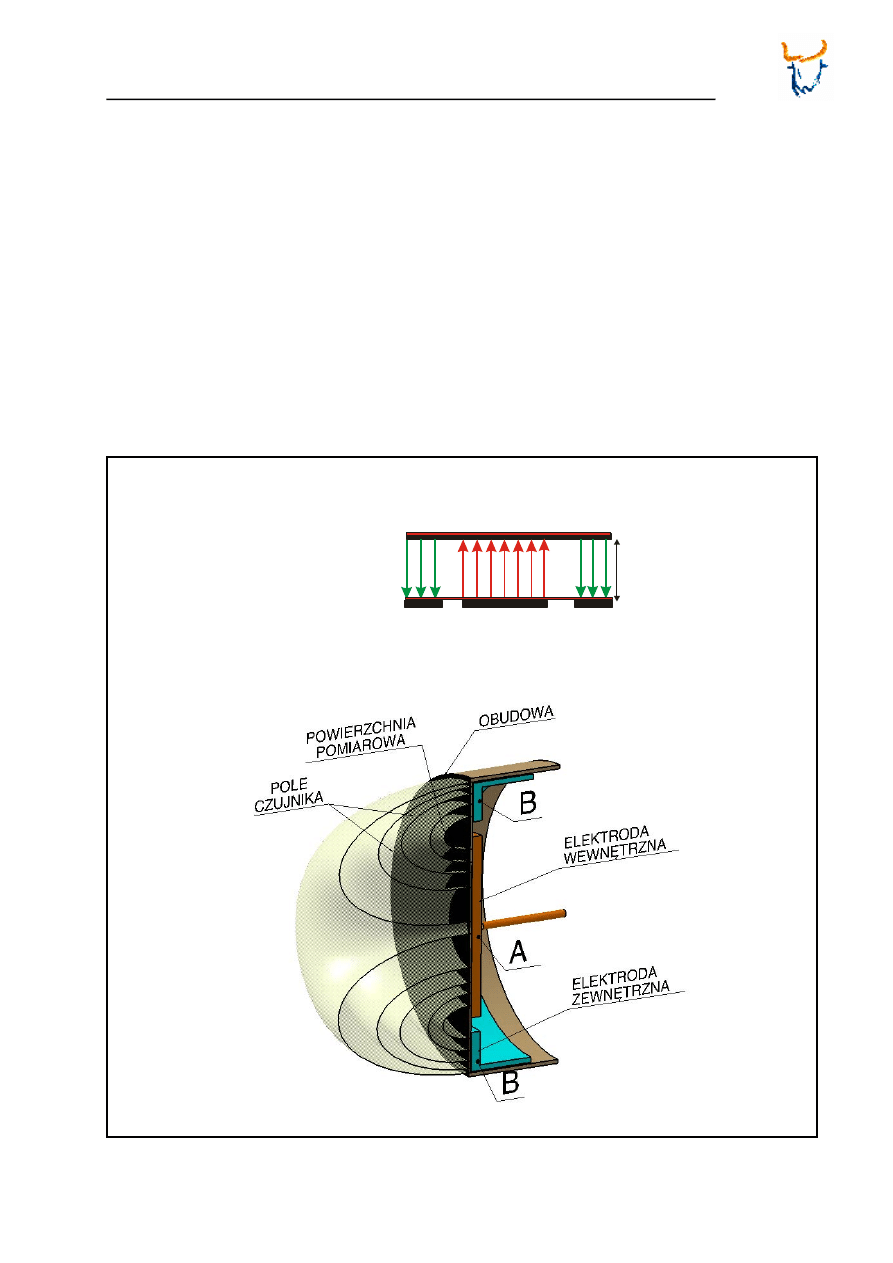
2.2
Zasada działania czujnika pojemnościowego
W celu wytworzenia symetrycznego pola elektrycznego, elektroda ze-
wnętrzna B musi mieć kształt pierścienia, koncentrycznego z cylin-
dryczną elektrodą A (rys. 2.2). Rolę elektrody pośredniej C, aktywują-
cej czujnik, pełni obiekt wykrywany. Za aktywną płaszczyznę czujnika
przyjmuje się zewnętrzną średnićę pierścienia B. Pojemność takiego
czujnika, maleje hiperbolicznie wraz z oddalaniem się przedmiotu wy-
krywanego.
Struktura pojemnościowa czujnika zależy od rodzaju wykrywanego
obiektu i jego uziemienia.
C
B
0
U
U/2
A
s
ε
0
B
0
Powierzchnia
czujnika
Element
wykrywany
Rys. 2.2:
Układ pól elektrycznych w głowicy czujnika pojemnościowego
25
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Obiekty nieprzewodzące, takie jak tworzywa, papier czy szkło, zwięk-
szają tylko pojemność własną czujnika, poprzez oddziaływanie na jego
stałą dielektryczną. Wzrost tej pojemności, uzależniony od wartości
stałe dialektycznej obiektu, jest jednak niewielki i dlatego odległość
działania jest również mała.
W przypadku obiektów przewodzących nieuziemionych tworzą się
dwa dodatkowe kondensatory ułożone szeregowo, jeden między
obiektem a elektrodą czujnika i drugi między obiektem a elektrodą ze-
wnętrzną. Odległość działania czujnika jest w tym przypadku większa.
Największą odległość działania uzyskuje się, gdy obiekt wykrywany
jest przewodnikiem i jednocześnie jest uziemiony. Wówczas dodatko-
wa pojemność, między obiektem i elektrodą, tworzy połączenie równo-
ległe z pojemnością własną czujnika.
Elektrody A i B są sprzężone z oscylatorem o dużej częstotliwości
(rys. 2.1). W przypadku braku obiektu w polu elektrycznym czujnika
oscylator nie pracuje. Gdy obiekt wchodzi w pole wywołane przez elek-
trody następuje uruchomienie oscylatora ,poprzez wzrost pojemności
między elektrodami A i B. Amplituda drgań oscylatora analizowana jest
przez układ detekcji, który generuje sygnał dla układu przełączające-
go. W układzie sprzężenia zwrotnego, między oscylatorem a elektro-
dą, występuje potencjometr, którym można ustawić próg zadziałania
układu oscylatora.
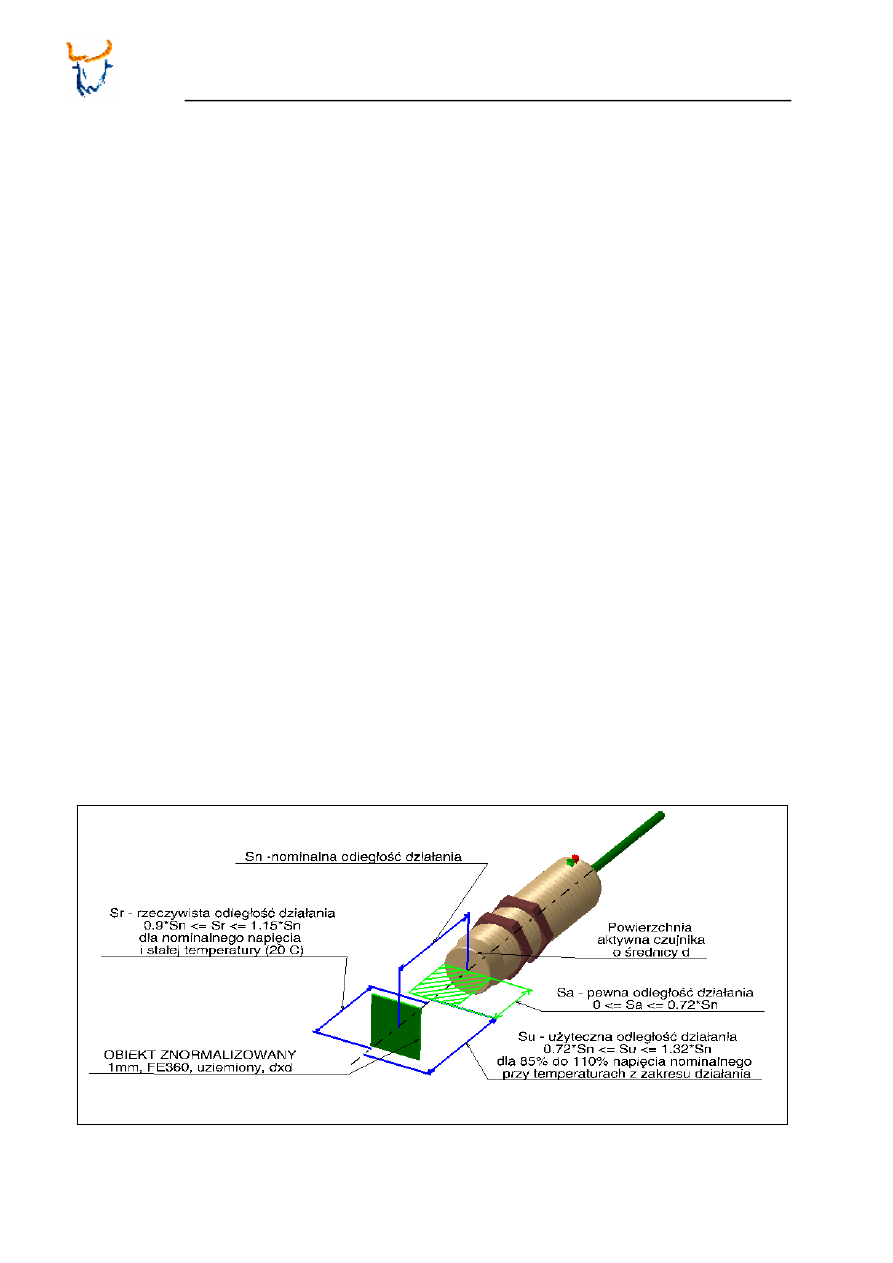
Dla czujnika pojemnościowego definjuje się nominalną odległość dzia-
łania S
n,
jako odległość, przy której następuje przełączenie układu wyj-
ściowego (rys. 2.3). Nominalna odległość działania czujnika pojemno-
ściowego odnośi się do obiektu metalowego uziemnionego o grubości
1mm, wykonanago ze stali FE360 o przekroju kwadratowym, którego
bok równy jest średnicy czoła czujnika lub równy trzem wartościom
S
n
, wzależności, która wartość jest większa.
Rys. 2.3:
Definicje odległości działania czujnika pojemnościowego
26
Systemy i funkcje mechatroniczne - Podręcznik
Minos
2.3
Typy czujników pojemnościowych
Czujniki pojemnościowe są zazwyczaj dostępne w postaci cylindrycz-
nych lub prostopadłościennych czujników zbliżeniowych, z częścią ak-
tywną na jednym z końców. Czujniki cylindryczne występują w dwóch
odmianach. Jedne są ekranowane, tak że mają strefę działania tylko
od czoła czujnika i montuje się je powierzchniowo w metalu lub two-
rzywie. Drugie mają dodatkową strefę działania w niewielkiej odległo-
ści od cylindrycznej powierzchni czujnika. Są to czujniki do zastoso-
wania w przypadkach, kiedy czujnik ma kontakt z medium wykrywa-
nym jak np. płyny czy granulat. Strefa działania tych czujników jest o
50% większa, gdyż większe pole elekryczne czujnika zamyka się na
jego bokach. Występują również specjalne konstrukcje jak elastyczne
czujniki, które mogą być przyklejone do poziomych jak i zakrzywionych
powierzchni.
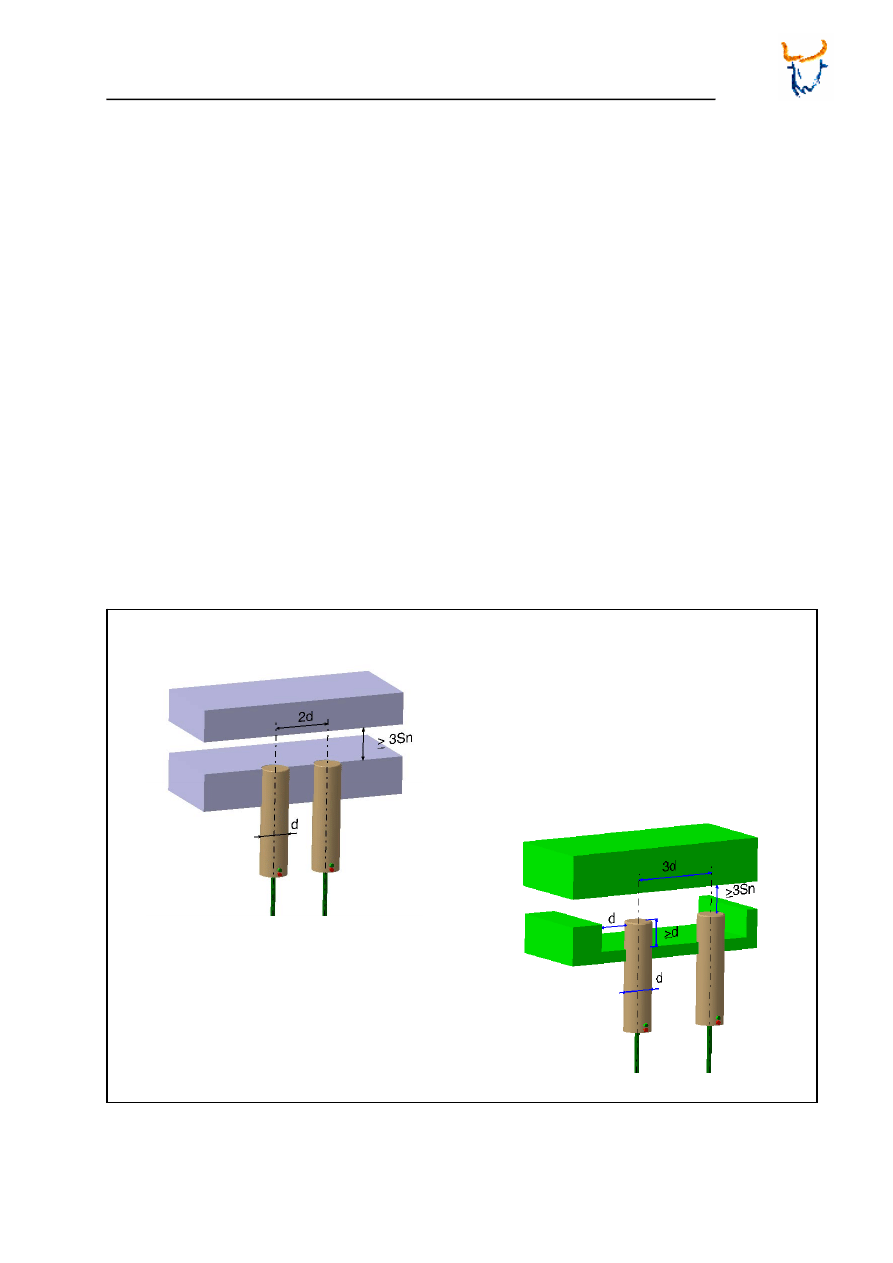
Przy montażu kilku czujników pojemnościowych należy zachować re-
guły zawarte na Rys. 2.4, w celu uniknięcia wzajemnego oddziaływa-
nia czujników i zakłóceń od elementów zewnętrznych.
Złącza przewodów zasilających i układów wyjściowych czujników po-
jemnościowych są podobne jak w czujnikach indukcyjnych. Możliwe są
więc czujniki pojemnościowe z dwoma, trzema lub czterema przewo-
dami. Mogą one być zasilane napięciem stałym jak i zmiennym.
a)
b)
Rys. 2.4:
Sposoby montażu czujników pojemnościowych: a) powierzchniowych,
b) niepowierzchniowych
27
Systemy i funkcje mechatroniczne - Podręcznik
Minos
28
2.4
Materiał obiektu
Odległość przełączania czujników pojemnościowych może ulegać du-
żym zmianom. Największy zakres osiągany jest dla materiałów prze-
wodzących. Jak wspomniano powyżej odległość ta zależy też od
uziemienia obiektu wykrywanego.
W przypadku obiektów z materiałów przewodzących rodzaj matriału
nie ma wpływu na strefą działania. Dla materiałów nieprzewodzących
odległość przełączenia zależy od stałych dielektrycznych, tj. im więk-
sza stała dielektryczna tym większy zakres przełączenia. Odległość
działania czujników pojemnościowych ulega redukcji wraz ze zmniej-
szaniem się stałej dielektrycznej obiektu.
Odległość, z jakiej czujnik wykrywa materiały organiczne, jak: drewno
czy ziarno, mocno zależy w dużym stopniu od zawartości wody w tych
materiałach. Związane to jest z bardzo dużą wartością stałej dielek-
trycznej wody (ε
wody
=80).
Nominalna odległość działania S
n
podawana w katalogach odnosi się
do znormalizowanego przedmiotu metalowego. Dla wyznaczenia rze-
czywistej odległości działania czujnika należy pomnożyć ją przez
współczynnik korekcji odpowiedni do rodzaju materiału wykrywanego
obiektu:
strefa działania=S
n
.
współczynnik korekcji
Przykładowe wartości tego współczynnika podano w tabeli 2.1.
Materiał Współczynnik korekcji
Stal 1
Woda 1
Drewno 0,7
Szkło 0,6
Olej 0,4
PCV 0,4
PE 0,37
Ceramika 0,3
Tabela 2.1:
Współczynniki korekcji dla różnych materiałów
Systemy i funkcje mechatroniczne - Podręcznik
Minos
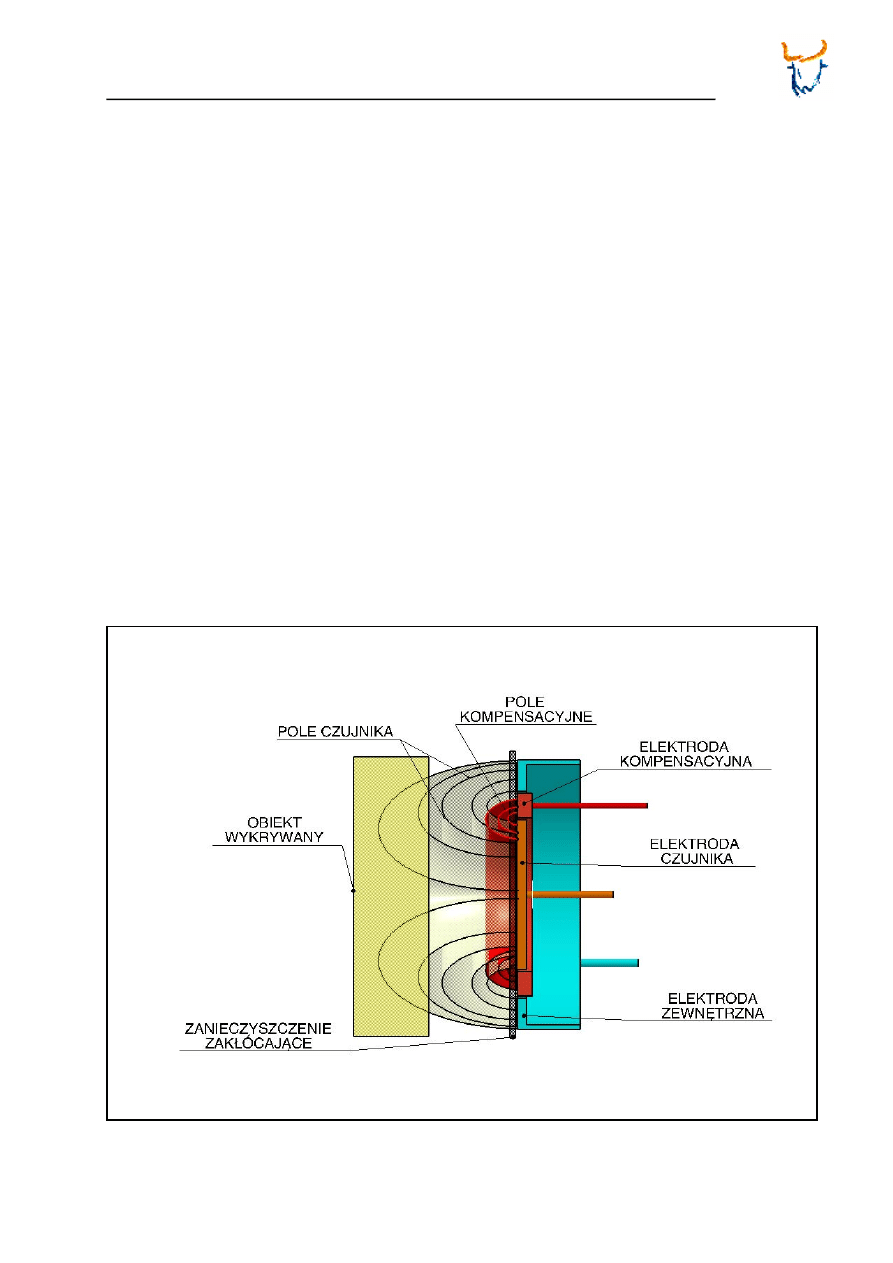
2.5
Kompensacja zakłóceń
W układzie detekcji stosuje się filtry interferencyjne, które eliminują
wpływ zewnętrznych pól elektrycznych, jeśli pola te nie są zbyt duże.
Filtry te mogą jednak znacznie obniżać maksymalną częstotliwość
przełączeń, pogarszając charakterystykę dynamiczną czujnika.
Zabrudzenie czujnika, zmiana wilgotności powietrza, lub osadzanie się
na aktywnych powierzchniach cząsteczek rosy, może być przyczyną
jego nieprawidłowych reakcji podczas eksploatacji. Aby utrzymać stałą
odległość wykrywania, w przypadku jednorodnego pola zakłóceń sto-
suje się dodatkowo elektrodę kompensacyjną, połączoną z wyjściem
oscylatora (rys. 2.5). Zanieczyszczenie zwiększa pojemność pomiędzy
elektrodą sensora i ekranem. Jednocześnie pojemność pomiędzy elek-
trodą sensora i elektrodą kompensacyjną generuje sprzężenie kom-
pensacyjne. Jednak w przypadku bezpośredniego kontaktu cienkich
obiektów z czujnikiem, np. kartka papieru, istnieje niebezpieczeństwo,
że sygnał zakłócenia będzie neutralizował odczyt elektrody głównej i
nie nastąpi przełączenia czujnika.
Rys. 2.5:
Czujnik z dodatkową elektrodą kompensacyjną
29
Systemy i funkcje mechatroniczne - Podręcznik
Minos
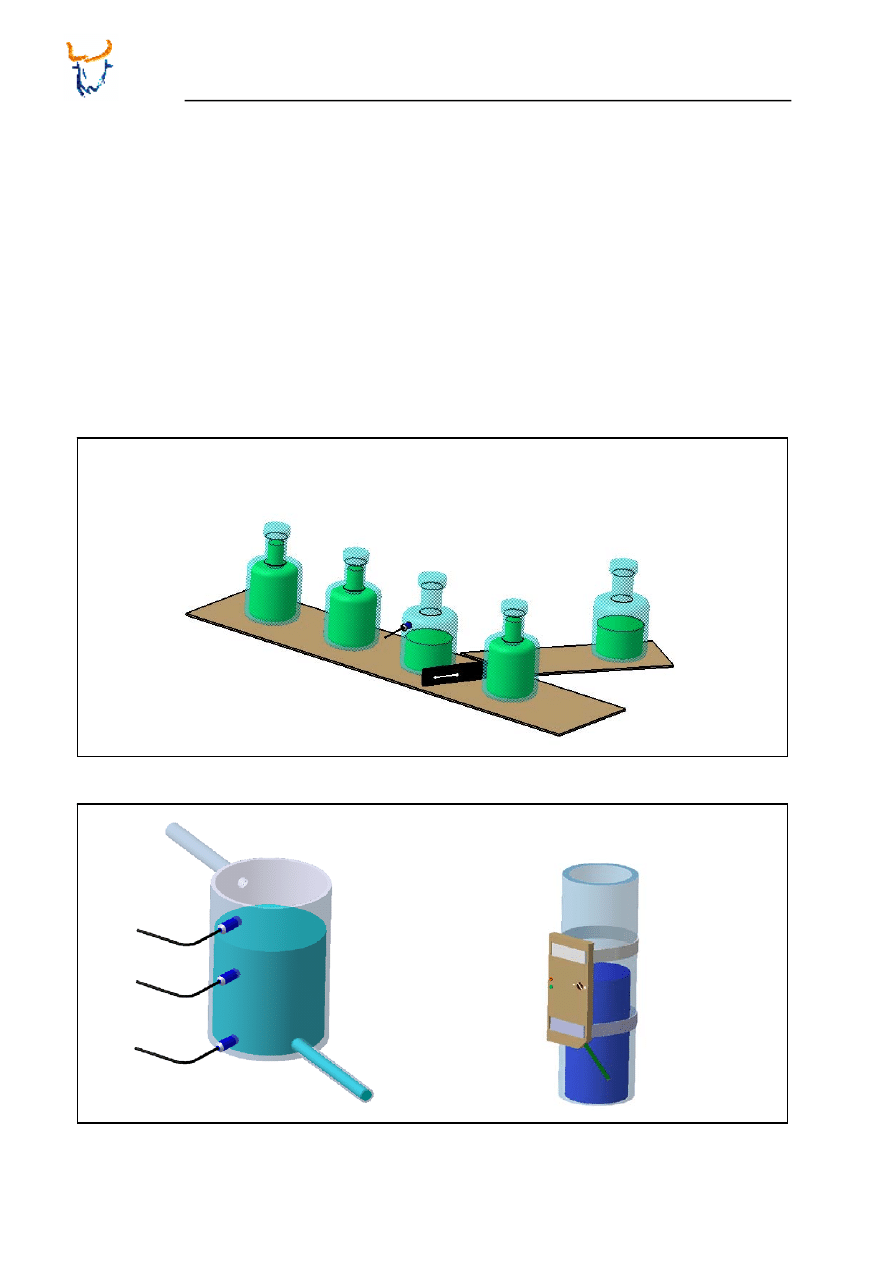
2.6
Aplikacje
W praktyce czujniki pojemnościowe ze względu na swoje cechy i pro-
stotę konstrukcji znajdują liczne zastosowania.
Czujniki te mogą monitorować:
-poziomy płynów w zbiorniku,
- poziomy granulatu w elewatorach,
- zliczać obiekty nieprzewodzące i przewodzące,
- wykrywać puste przestrzenie poprzez opakowanie,
- wykrywać uszkodzenia w obiektach.
Rys. 2.6:
Wykrywanie i odrzucanie niepełnych pojemników z płynem
Rys. 2.7:
Monitorowanie poziomu płynu w zbiorniku i wykrywanie poziomu napełnienia
przewodów
30
Systemy i funkcje mechatroniczne - Podręcznik
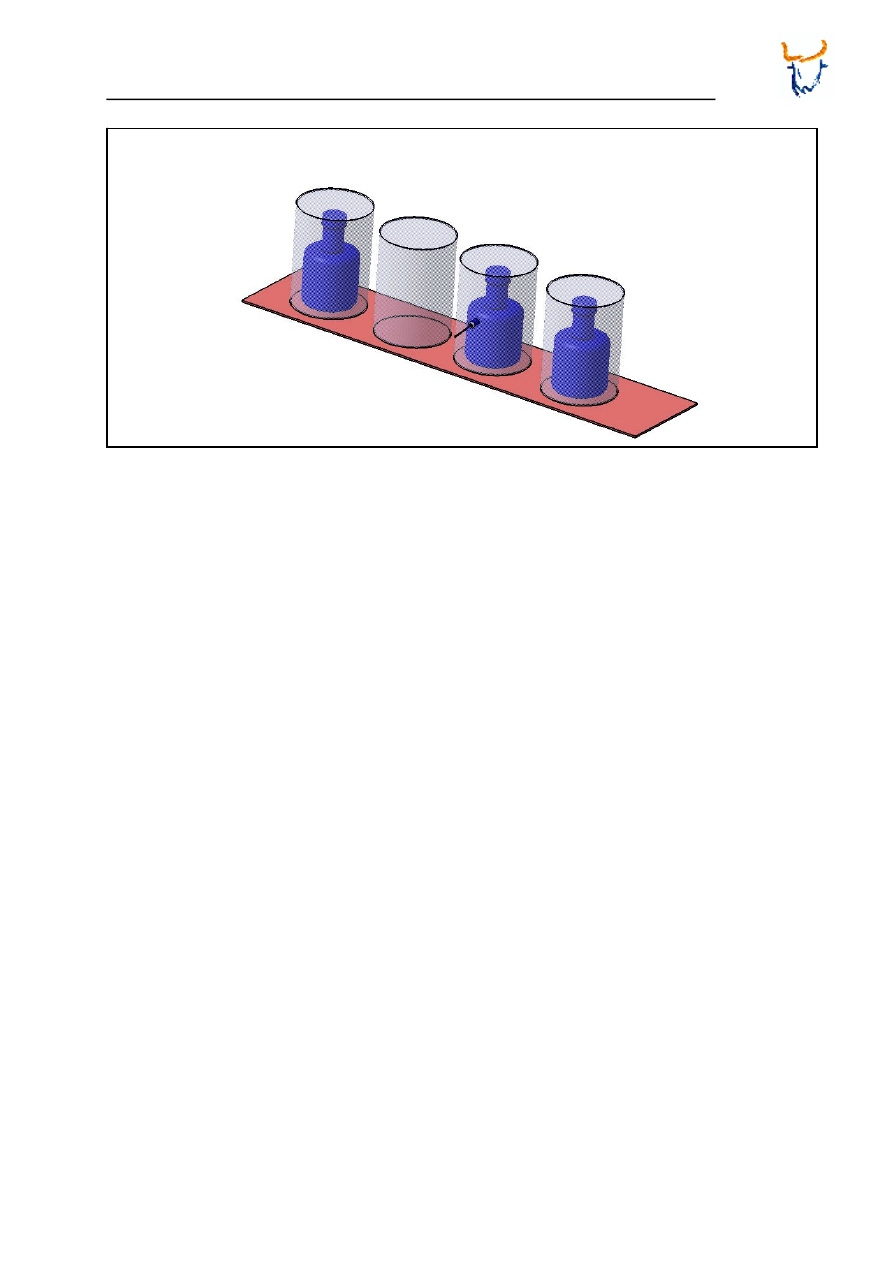
Minos
Rys. 2.8:
Wykrywanie pustych opakowań papierowych na taśmie
31
Systemy i funkcje mechatroniczne - Podręcznik
Minos
3
Czujniki ultradźwiękowe
3.1
Informacje podstawowe
Czujniki ultradźwiękowe są stosowane do wykrywania obiektów nieza-
leżnie od rodzaju materiału i koloru, detekcji poziomów cieczy przeźro-
czystych i nieprzeźroczystych. Znajdują one zastosowanie przede
wszystkim w środowisku o dużym zapyleniu i w miejscach, gdzie ze
względu na znaczne zabrudzenie, nie jest możliwe zastosowanie czuj-
ników optycznych. Czujniki te generują wiązkę ultradźwiękową. Zasa-
da działania polega na pomiarze czasu upływającego pomiędzy wy-
słanym sygnałem ultradźwiękowym a odebranym echem, odbitym od
przeszkody. Czas ten jest proporcjonalny do odległości od obiektu.
Możliwe częstotliwości przełączania stanu wyjścia w tych czujnikach
są niewielkie (od kilku do ponad 100Hz) w porównaniu do innych czuj-
ników detekcyjnych, co wynika z zasady ich działania.
Przetworniki ultradźwiękowe generują fale akustyczne o częstotliwo-
ściach leżących, wyraźnie poza zasięgiem fal słyszalnych, czyli powy-
żej 20kHz.
Duża częstotliwość pracy przetwornika ultradźwiękowego sprawia, że
są one praktycznie odporne na interferencję z dźwiękami występują-
cymi w otoczeniu czujnika.
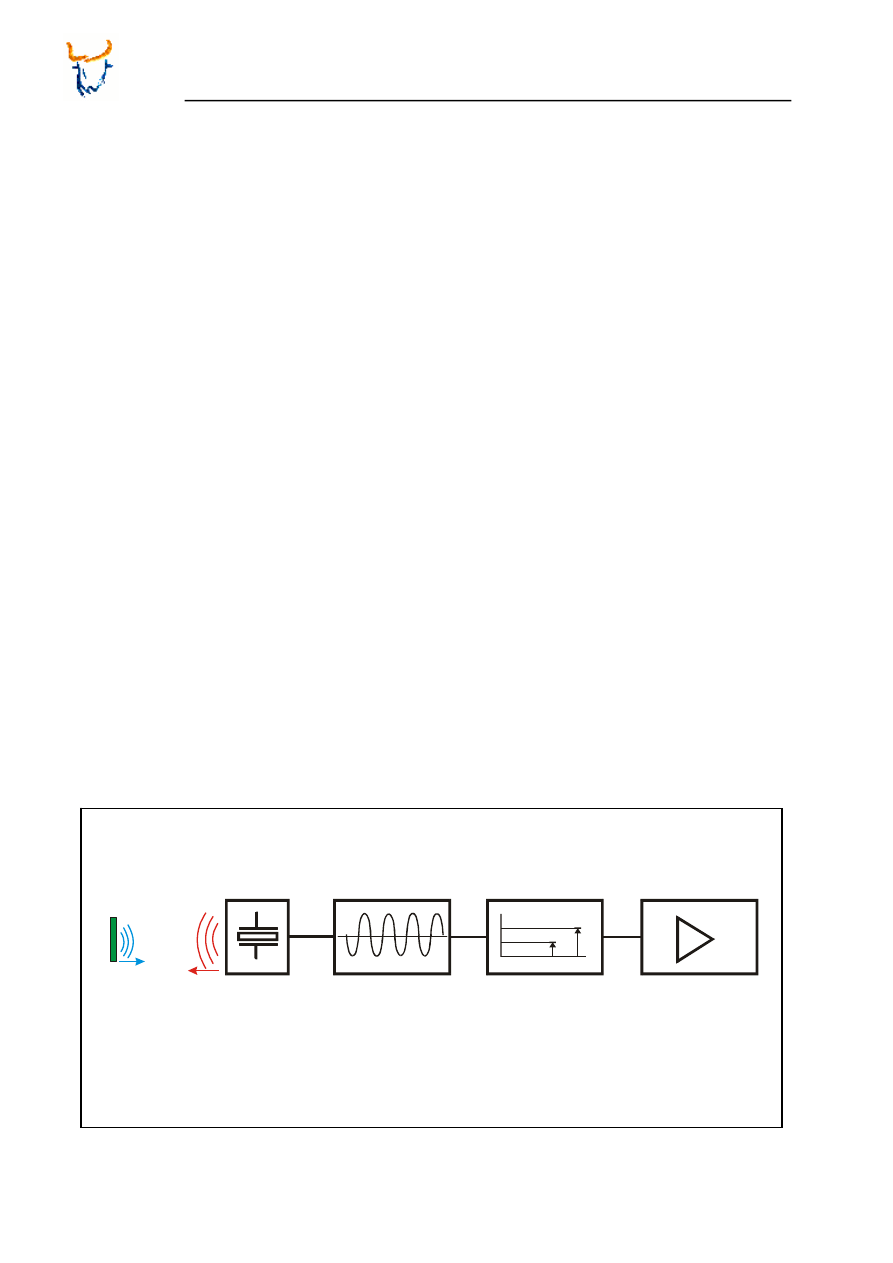
Głównymi składnikami takiego czujnika są: generator wysokiego na-
pięcia, przetwornik piezoelektryczny umieszczony w głowicy czujnika,
układ przetwarzania sygnału i układ wyjściowy (rys. 3.1).
UKŁAD
WYJŚCIOWY
UKŁAD
DETEKCJI
UKŁAD
GENERATORA
GŁOWICA
CZUJNIKA
OBIEKT
Rys. 3.1:
Schemat blokowy czujnika ultradźwiękowego
32
Systemy i funkcje mechatroniczne - Podręcznik
Minos
3.2 Wpływ środowiska
Propagacja dźwięku, jego zasięg, rozkład i prędkości fali dźwiękowej
zależy w pewnym stopniu od środowiska, w którym fala się rozchodzi.
Przypadkowe zmiany własności fizycznych środowiska, jakim jest po-
wietrze, mogą w konsekwencji oddziaływać na dokładność wyniku
pomiaru odległości. Do własności tych należą:
Temperatura: Wahania temperatury powietrza powodują zmianę
prędkości fali dźwiękowej (rys. 3.2). Zmiany te są rzędu 0.17%/°K.
Większość czujników posiada wewnętrzną elektroniczną kompensację
wpływu temperatury, co w dużym stopniu (około w 2/3) eliminuje nie-
korzystne skutki jej oddziaływania.
Ciśnienie: Wahania ciśnienia atmosferycznego w granicach ±5%,
zmieniają prędkość fali dźwiękowej o około ±0.6%.
Wilgotność: Wzrost wilgoci powietrza powoduje zwiekszenie
prędkości dźwięku maksymalnie o 2 % w stosunku do powietrza
suchego.
Prądy powietrzne: Oddziaływanie prądów powietrznych jest zależne
od ich kierunku i intensywności. Silne wiatry powyżej 50 km/h, wiejące
w kierunku zgodnym kierunkiem propagacji fali dźwiękowej mogą zna-
cząco zmienić jej prędkość. Wiejące natomiast prostopadle odchylają
ją, co też jest niekorzystne.
Zanieczyszczenie: Duże zanieczyszczenie powietrza powoduje za-
brudzenie powierzchni nadajnika fali dźwiękowej, co może ograniczyć
zasięg emitowanej wiązki nawet do 30%.
Ciśnienie 1013hPa
310
320
330
340
350
360
370
-20
-10
0
10
20
30
40
50
60
Temperatura [ºC]
Pr
ę
dko
ść
d
żwi
ę
k
u
[m
/s
]
Rys. 3.2:
Wpływ temperatury powietrza na prędkość fali dźwięko-
wej
33
Systemy i funkcje mechatroniczne - Podręcznik
Minos
3.3
Wytwarzanie fali ultradźwiękowej
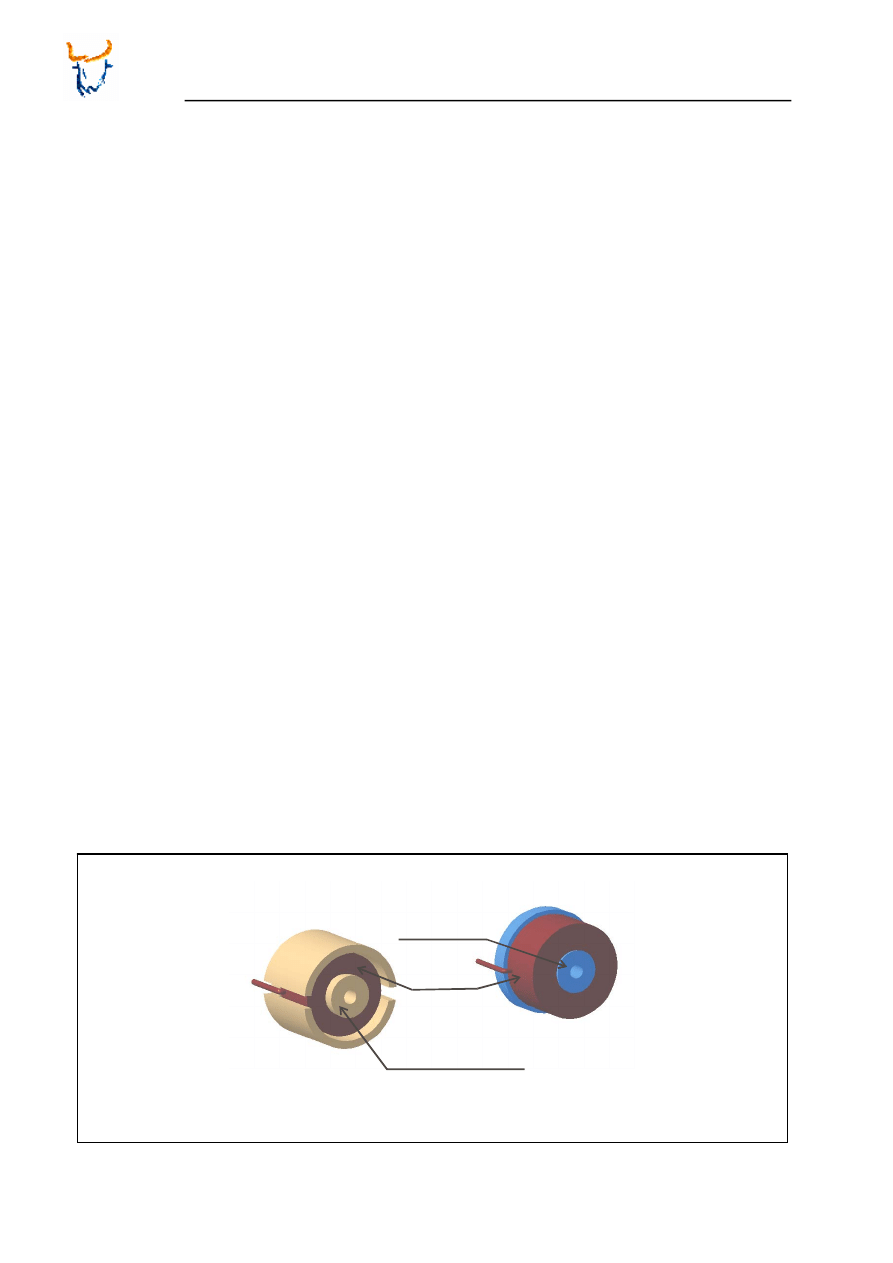
Fale ultradźwiękowe wytwarza się za pomocą przetworników, przy
czym najszersze praktyczne zastosowanie mają przetworniki piezo-
elektryczne. Efekt piezoelektryczny polega na powstawaniu ładunków
elektrycznych w przetworniku pod wpływem naprężeń.
Własności piezoelektryczne wykazują niektóre kryształy, takie jak
kwarc lub siarczan litu. Jest to związane ze śrubowym ułożeniem ko-
mórek elementarnych sieci krystalicznej kwarcu. Zjawisko to jest od-
wracalne, a wiec pod wpływem napięcia przyłożonego do przetwornika
ulega on odkształceniom.
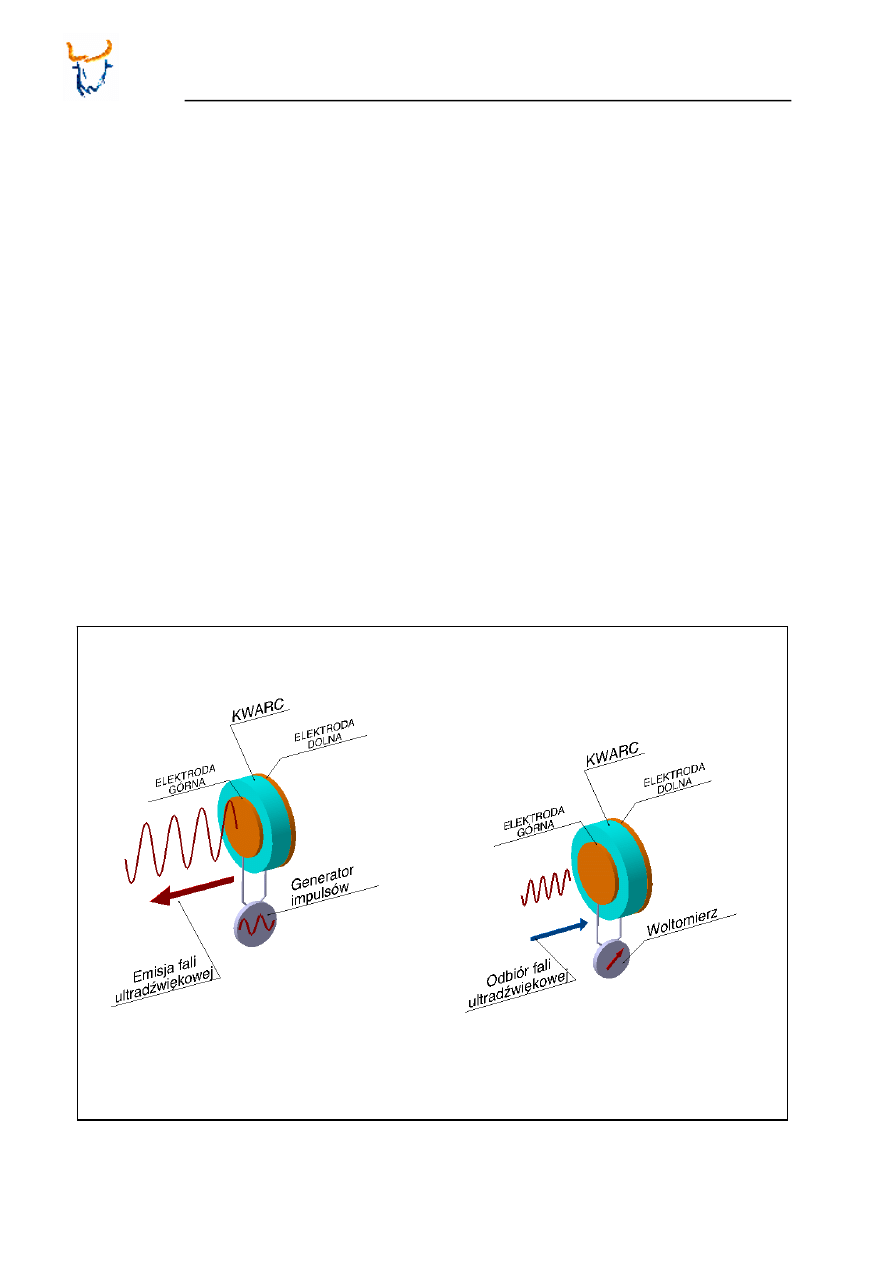
Gdy przetwornik styka się z materiałem lub innym medium np. powie-
trzem, to jego drgania spowodowane zmianami napięcia przekazywa-
ne są cząstkom tego medium i w ten sposób wzbudzona zostaje w nim
fala. I odwrotnie, jeśli drgania cząsteczek medium przekazane zostaną
przetwornikowi, to pod wpływem doznawanych odkształceń na po-
wierzchniach tego przetwornika powstają ładunki elektryczne. Tak
wiec, jeśli jest taka potrzeba, to ten sam przetwornik piezoelektryczny
służyć może zarówno do wytwarzania, jak i do odbioru fal (rys. 3.3).
Rys. 3.3:
Nadajnik i odbiornik fali ultradźwiękowej
34
Systemy i funkcje mechatroniczne - Podręcznik
Minos
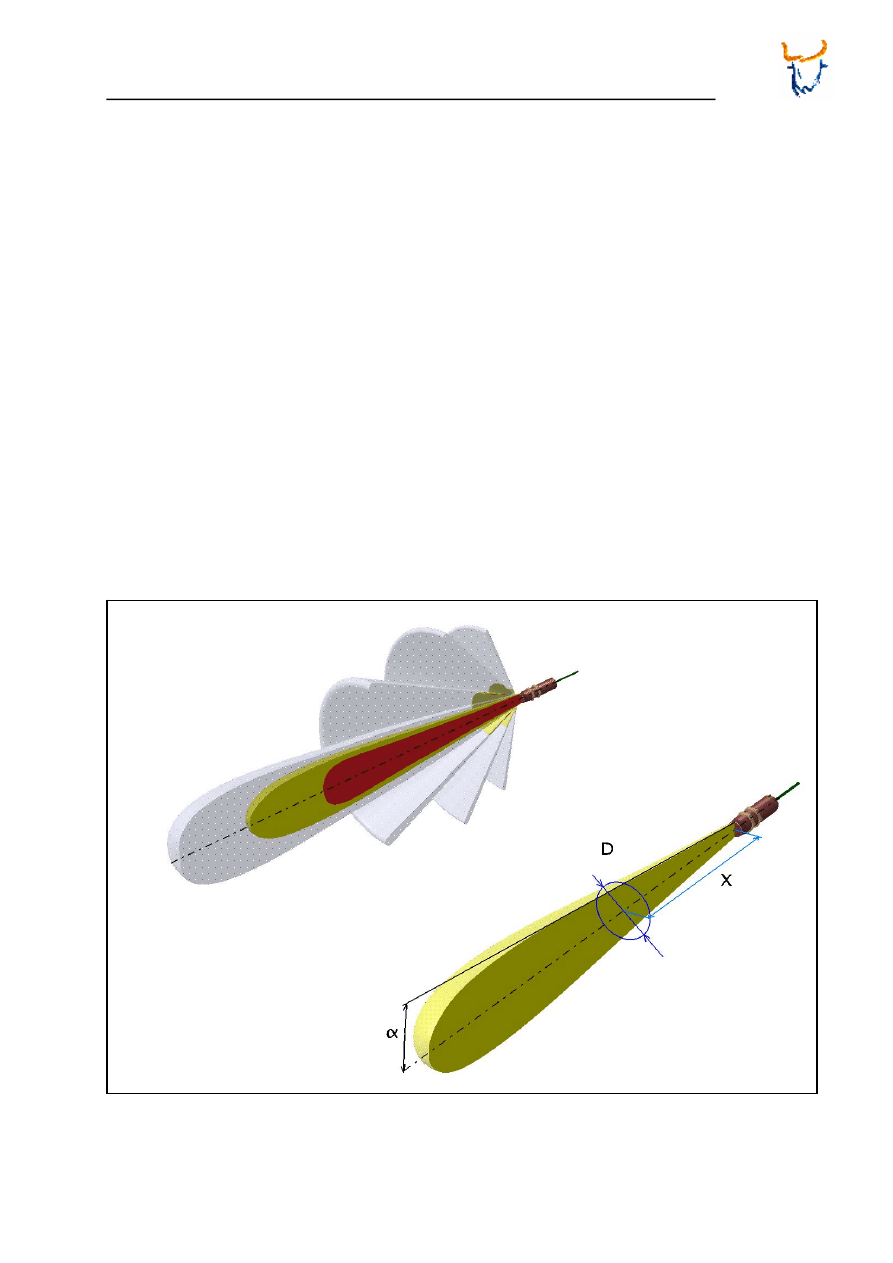
Obszar rozchodzenia się fali ultradźwiękowej jest w znacznym stopniu
rozproszony (rys. 3.4a). Największa energia dźwięku występuje w po-
bliżu osi czujnika. Jeśli założyć, że w obszarze zaznaczonym kolorem
szarym energia wiązki dźwiękowej jest już niewystarczająca dla po-
prawnej pracy czujnika, to kształt wiązki przydatnej w pomiarach jest
zbliżony do powierzchni stożka o kącie
α (rys. 3.4b). Kąt ten wyznacza
obszar, w którym energia fali ultradźwiękowej nie spada poniżej 50%
energii występującej w pobliżu osi centralnej stożka.
Średnicę stożka wiązki ultradźwiękowej D, w odległości X od czoła
czujnika, można wyznaczyć z zależności:
D = 2
٠
X
٠
tan (
α/2)
Gdzie:
X – odległość przedmiotu od czujnika
α – kąt stożka wiązki ultradźwiękowej
Stosownie do potrzeb wytwarzane są czujniki emitujące falę o różnych
kątach tego stożka. Są to kąty od kilku do kilkudziesięciu stopni. Za-
równo kąt jak i postać wiązki ultradźwiękowej jest określona przez
wielkość, kształt i częstotliwość drgającej powierzchni przetwornika.
b)
a)
Rys. 3.4:
Schematyczny widok fali ultradźwiękowej emitowanej przez czujnik:
a) przekrój wzdłuż osi czujnika, b) fragment wiązki spełniający wymagania czujni-
ka ultradźwiękowego
35
Systemy i funkcje mechatroniczne - Podręcznik
Minos
3.4
Zasada pracy
Typowe czujniki ultradźwiękowe pracują w jednym z dwóch trybów: dy-
fuzyjnym (diffuse sensor) i przelotowym (trough beam sensor). Odbicie
dyfuzyjne jest metodą najbardziej popularną dla czujników ultradźwię-
kowych. Odbita od przedmiotu fala dźwiękowa wraca z powrotem do
czujnika jako echo. Zależnie od zastosowanego typu wyjścia, wyzna-
czona na podstawie pomiaru czasu, odległość jest przekształcana na
prądowy lub napięciowy sygnał analogowy, lub na odpowiedni stan
wyjścia dwustanowego ON/OFF. Kiedy przedmiot opuści strefę pomia-
rową czujnika jego układ wyjściowy wraca do poprzedniego stanu. W
pomiarach ultradźwiękowych występują zatem dwie fazy (rys. 3.5):
- wysyłanie wiązki ultradźwiękowej przez przetwornik w kierunku
przedmiotu,
- wysyłanie wiązki ultradźwiękowej przez wykrywany przedmiot w kie-
runku przetwornika, przy czym w tym przypadku wiązka ta jest echem
sygnału z przetwornika.
W czujnikach dyfuzyjnych obydwie te funkcje spełnia najczęściej ten
sam przetwornik piezoelektryczny.
Czułość czujnika jest tym lepsza im większa jest gęstość przedmiotu
wykrywanego, gdyż większa część fali dźwiękowej jest odbijana. Z te-
go powodu czujniki ultradźwiękowe są szczególnie przydatne do wy-
krywania przedmiotów o wysokim akustycznym współczynniku odbicia.
Takim współczynnikiem odbicia odznaczają się materiały stałe, płynne,
lub media typu granulat.
a)
b)
Przetwornik
w trybie nadawania
Przedmiot
Przetwornik
w trybie odbierania
Przedmiot
Rys. 3.5:
Dwie fazy występujące w pomiarach ultradźwiękowych: a) tryb nadawania sygna-
łu, b) tryb odbierania sygnału
36
Systemy i funkcje mechatroniczne - Podręcznik
Minos
W czujnikach dyfuzyjnych generowane są cyklicznie impulsy dźwięko-
we. Odstęp czasu między wygenerowaniem impulsu dźwiękowego a
zarejestrowaniem echa odbitego od przedmiotu jest proporcjonalny do
aktualnej odległości między przedmiotem i czujnikiem. Dla czujników,
w których przetwornik pełni podwójną rolę tj. generuje i odbiera fale ul-
tradźwiękowe, czas trwania impulsu T
i
musi być wyraźnie krótszy od
czasu potrzebnego na powrót echa T
e
(rys. 3.6) Impulsy te są powta-
rzane cyklicznie z częstotliwością kilkudziesięciu Hz. Oczekiwanie na
powracające echo rozpoczyna się po wysłaniu impulsu i trwa aż do
wysłania następnego impulsu. Mierząc zatem czas T
e
, po jakim echo
powróci do czujnika, można wyznaczyć odległość przedmiotu, od któ-
rego echo zostało odbite. W czujnikach detekcyjnych pojawienie się
echa oznacza natomiast wykrycie przedmiotu w polu działania czujnika
i powoduje przełączenie stanu wyjścia czujnika.
Ultradźwiękowe czujniki dyfuzyjne wykorzystują specjalny przetwornik,
sterowany układem elektronicznym, generujący i odbierający
impulsową falę dźwiękową. Przetwornik emituje serię impulsów
ultradźwiękowych, w czasie od kilku mikrosekund do 1ms i oczekuje
na ich powrót po odbiciu od wykrywanego przedmiotu. Wyłączony stan
wyjścia OFF zmienia się na stan załączony ON, gdy w polu stożkowej
wiązki ultradźwiekowej pojawi się powierzchnia odbijajaca dźwięk.
Amplituda
Czas
Czas cyklu
e
Czas powrotu echa T
Czas oczekiwania
na sygnał powrotny
Sygnał
odbity
Czas trwania
impulsu T
i
Czas trwania
impulsu T
i
Rys. 3.6:
Cykl pracy czujnika ultradźwiękowego
37
Systemy i funkcje mechatroniczne - Podręcznik
Minos
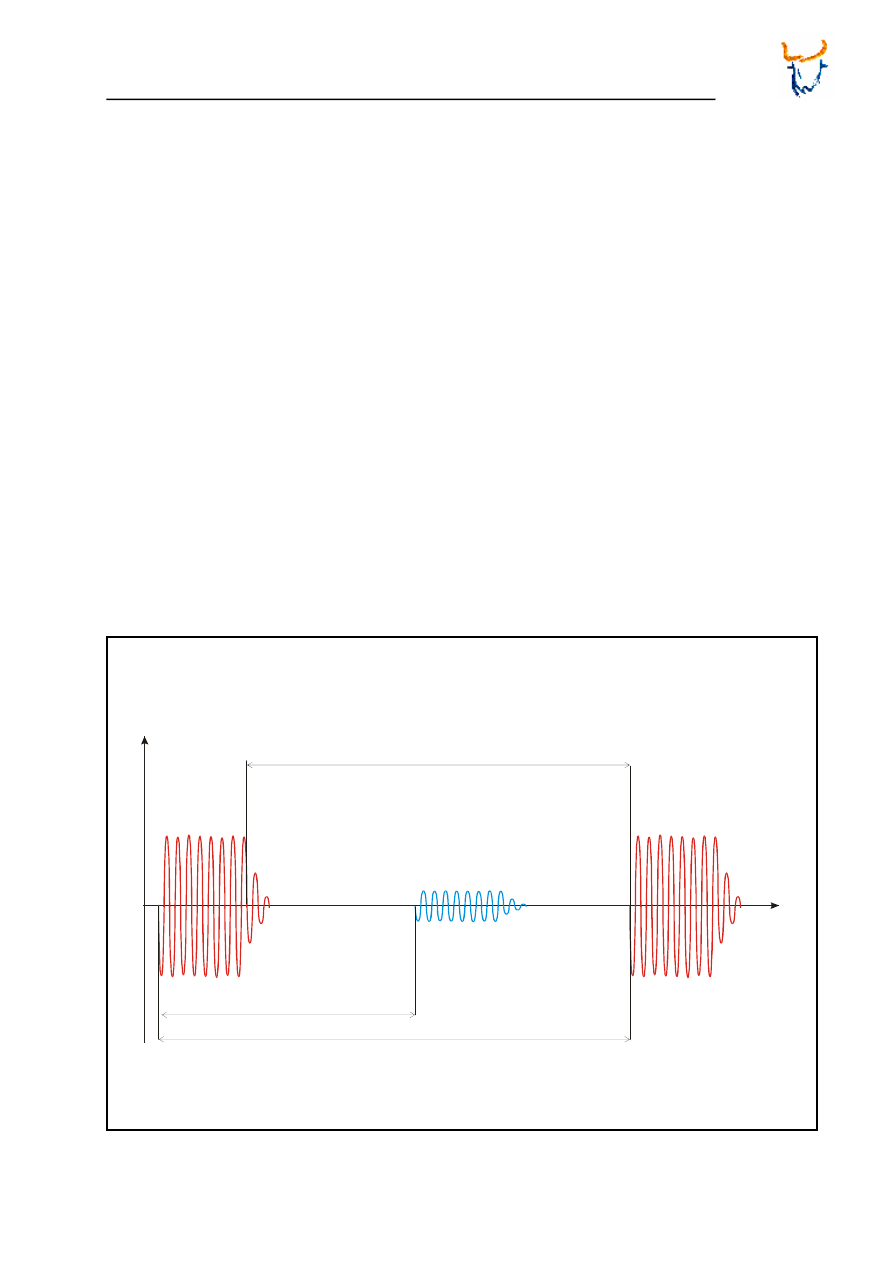
Maksymalny zasięg czujnika może być ograniczany za pomocą od-
powiedniego potencjometru. Dzięki temu przedmioty umieszczone po-
za tym ograniczeniem nie są wykrywane (rys. 3.7). W ten sposób re-
alizowana jest funkcja wygaszania tła (blanking out the background).
Możliwość nastawiania dolnej granicy zasięgu mają tylko niektóre od-
miany czujników. Uzyskuje się wówczas dodatkowo strefę zabloko-
waną, pozwalającą bardzo precyzyjnie zdefiniować strefę aktywną, w
której przedmioty będą wykrywane. Zdefiniowanie strefy zablokowanej
zapobiega wykryciu przedmiotu znajdującego się w tej strefie.
W pobliżu czoła czujnika występuje martwa strefa, w której również
przedmioty nie są wykrywane, lub ewentualne ich wykrycie nie jest
wiarygodne. Wielkość martwej strefy zależy od zasięgu i wielkości
czujnika. Krótsze czujniki o małym zasięgu będą miały mniejsze
martwe strefy niż czujniki o wiekszym zasięgu.
Istnienie martwej strefy jest wynikiem pełnienia przez przetwornik
zarówno funkcji generatora dźwięku jak i odbiornika. Przetwornik jest
gotowy do odbierania echa dopiero po zakończeniu wysyłania impulsu
dźwiekowego.
38
Rys. 3.7:
Definiowanie strefy wykrywania przez określenie górnej i dolnej granicy zakresu
pracy czujnika
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Standardowym przedmiotem jest metalowa płytka kwadratową o
grubości 1 mm odbijajaca falę ultradźwiekową. Używana jest ona do
ocenny zakresu działania czujnika Sn. Płytka ta powinna być
ustawiona pionowo do osi fali dźwiękowej. Jej wielkość zależy od
zasięgu czujnika i tak: dla czujników o krótkim zasiegu do 300mm
może to być płytka o boku 10mm, a dla czujników o zasiegu powyżej
800mm płytka o boku 100mm. Przedmioty o innych wymiarach,
kształtach oraz własnościach mogą nie gwarantować uzyskania w
pomiarach katalogowych wartości zakresu wykrywania S
n
.
Ogólnie obowiązują zasady:
- niższa częstotliwość sensora, to dłuższy zasięg wykrywania,
- wyższe częstotliwości pracy, to większa rozdzielczość pomiaru i
mniejsza podatność na szum drugoplanowy.
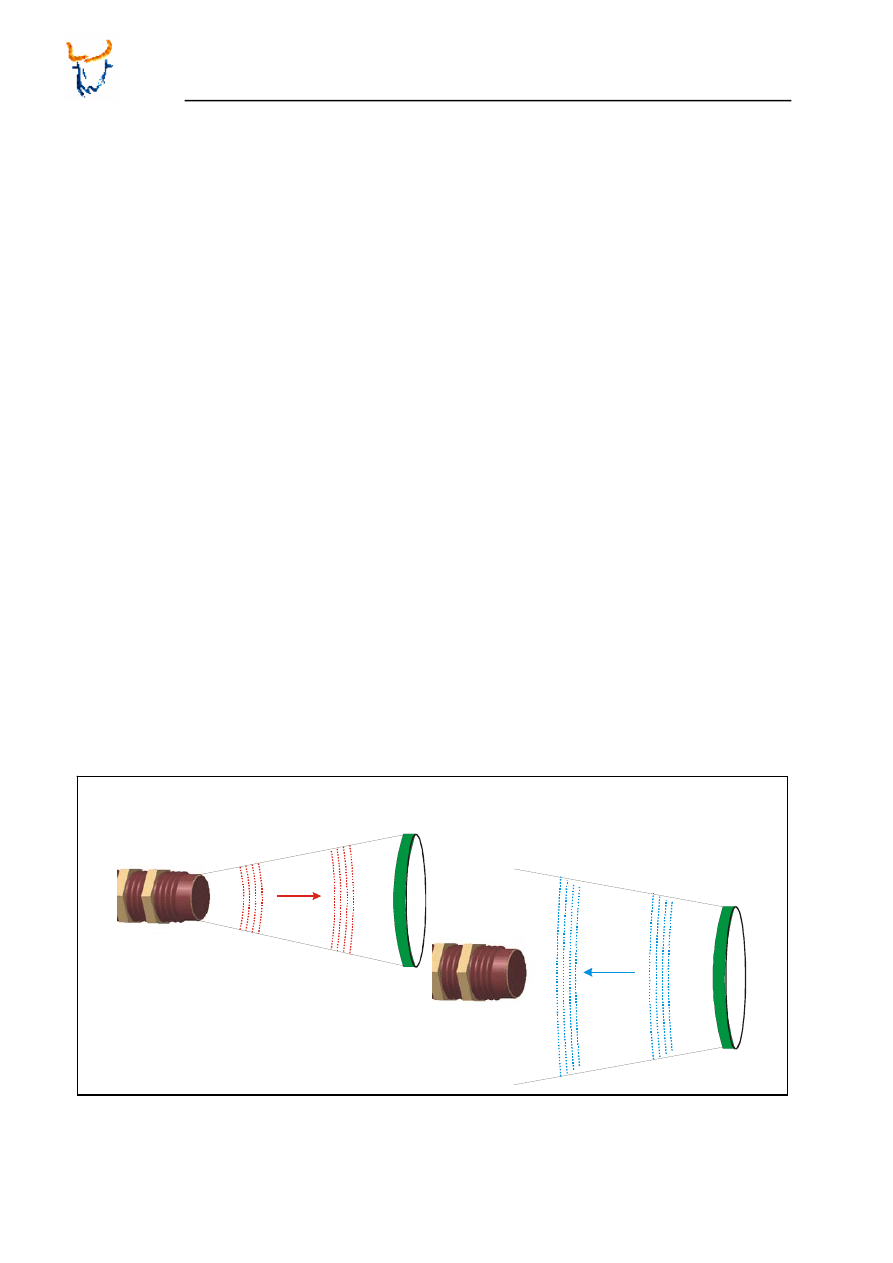
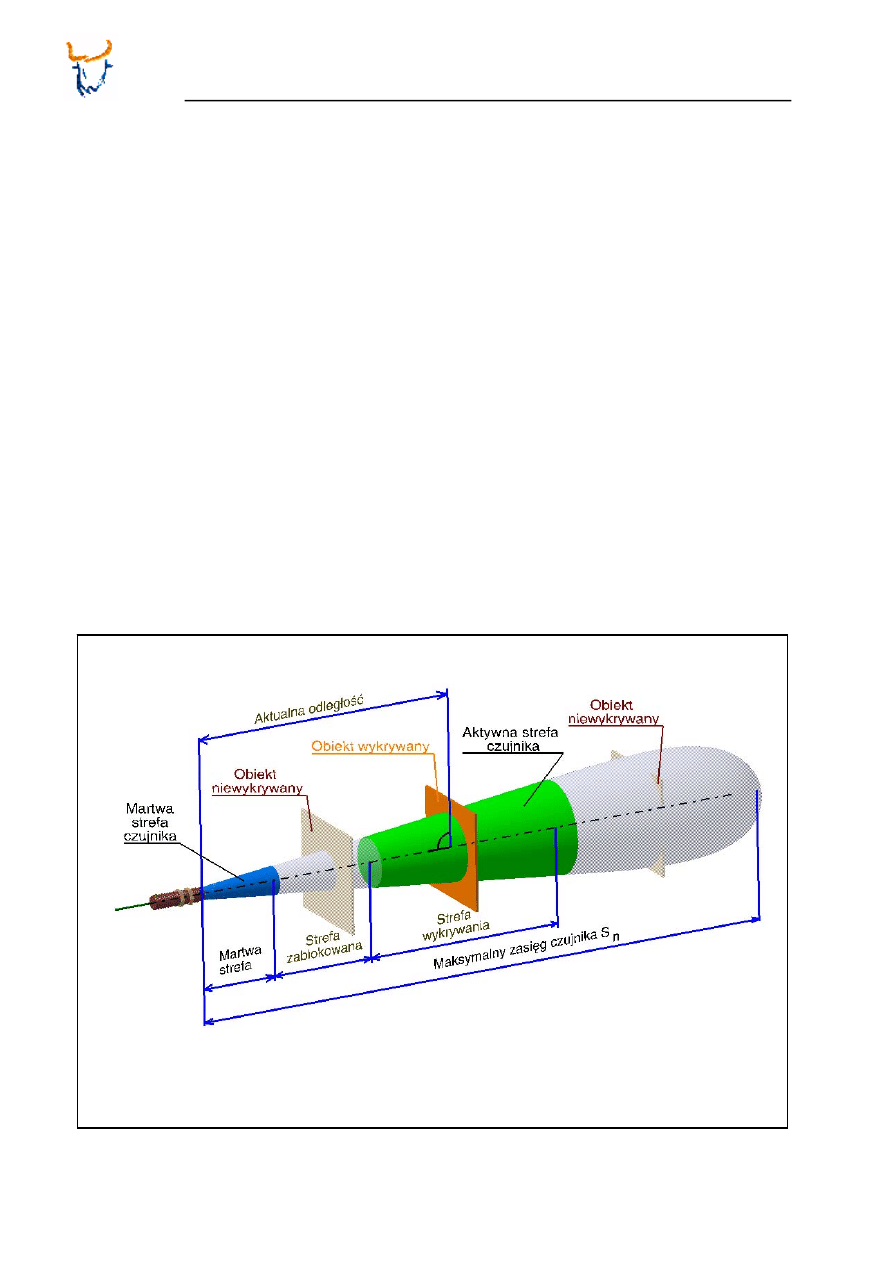
W czujnikach przelotowych przetwornik ultradźwiękowy generuje falę
dźwiękową w kierunku odbiornika umieszczonego w niezależnej
obudowie. Przedmiot przerywając falę dźwiękową powoduje
przełączenie wyjścia czujnika (rys. 3.8).
W przelotowych czujnika ultradźwiękowych, w przeciwieństwie do
czujników dyfuzyjnych i refleksyjnych, przetwornik generuje ciągłą falę
dźwiękową i nie występuje tutaj tzw. matrwa strefa.
b)
a)
Rys. 3.8:
Stan wyjścia czujnika przelotowego: a) przed wykryciem przedmiotu. b) po wykry-
ciu przedmiotu
39
Systemy i funkcje mechatroniczne - Podręcznik
Minos
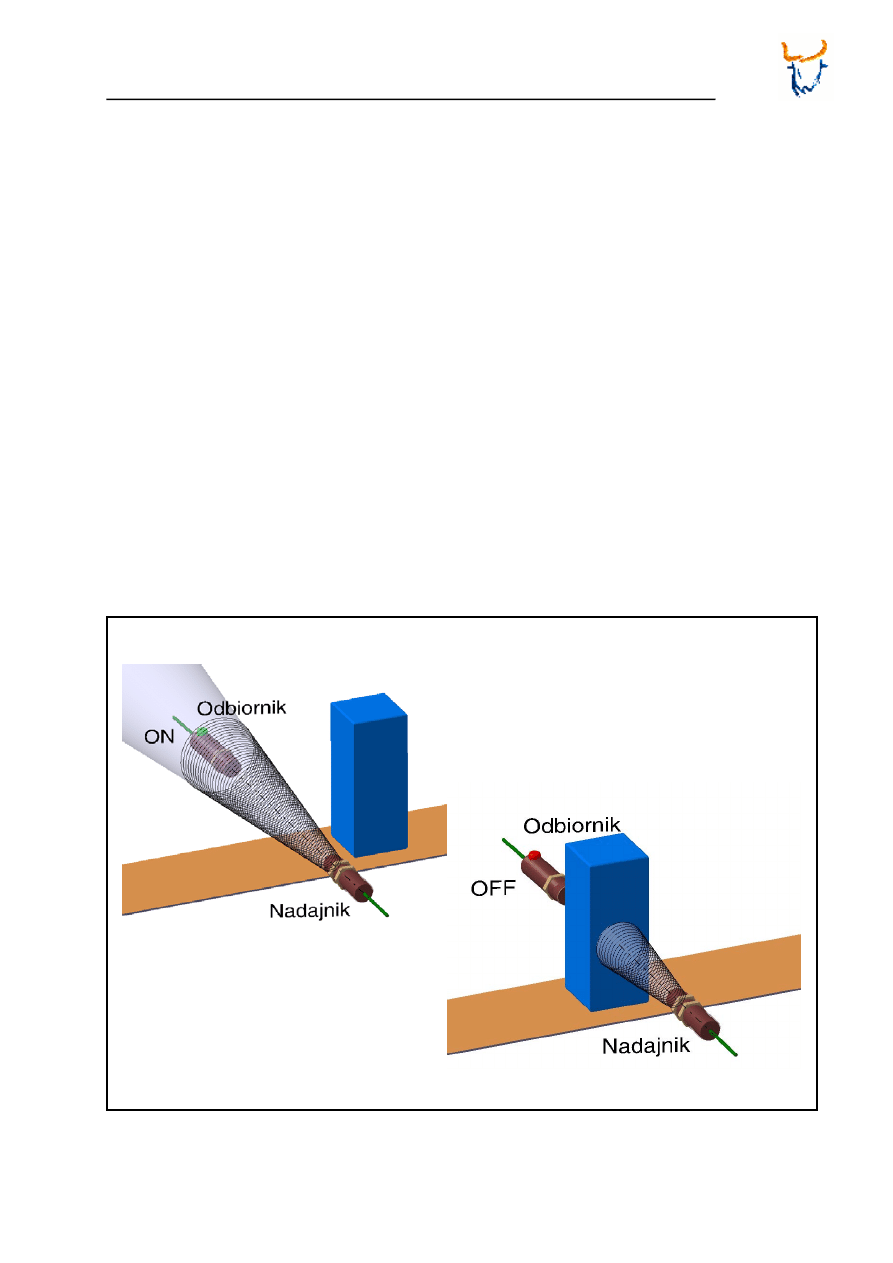
Te czujniki znajdują zastosowanie do wykrywania nie tylko
przedmiotów odbijających dźwięk, ale zwłaszcza do wykrywania
przedmiotów porowatych rozpraszajacych lub pochłaniajacych dźwięk,
a także przedmiotów o kształtach trudnych do wykrycia przez czujniki
dyfuzyjne.
Przedmioty o powierzchniach dobrze odbijających fale dzwiekowe lecz
położonych względem osi czujnika nawet tak jak pokazuje Rys. 3.9,
skutecznie przerywają wiązkę ultradźwiekową i mogą być łatwo
wykryte przez czujnik przelotowy. Posłużenie się w takim przypadku
czujnikiem dyfuzyjnym nie pozwoli na wykrycie takiego przedmiotu.
Kierunek wiązki odbitej zbyt dużo bowiem odbiega od osi czujnika.
Cżestotliwość przełączeń stanu wyjścia czujników przelotowych jest
wyższa niż dyfuzyjnych i może osiągać do 200 Hz.
PRZEDMIOT
Kierunek
wiązki odbitej
Kierunek
wiązki odbitej
Rys. 3.9 :
Przykład kształtu przedmiotu trudnego do wykrycia przez czujnik dyfuzyjny, a wy-
krywanego przez czujnik przelotowy
40

Systemy i funkcje mechatroniczne - Podręcznik
Minos
41
3.5
Zakłócenia pracy czujników
Poprawna praca czujnika może zostać zakłócona przez:
- Prądy powietrzne, które mogą zmienić prędkość lub kierunek fali
akustycznej na tyle, że przedmiot nie zostanie wykryty lub źle zostanie
wyznaczona jego odległość od czujnika.
- Zmiany ciśnienia powietrza, przy czym normalne atmosferyczne
zmiany ciśnienia powietrza w granicach ± 5 %, mogą spowodować
zmianę zakresu działania czujnika do około ± 0.6 %.
- Przyrosty temperatury w strefie działania czujnika, przez przed-
miot emitujący znaczne ilości ciepła może utworzyć strefę o zmiennej
temperaturze, która zmienia czas propagacji fali i w ten sposób
zmniejsza pewność działania czujnika. Wzrost temperatury i
wilgotności może spowodować, że odległość przedmiotu będzie
wykrywana jako mniejsza. Gorące powierzchnie odbijają kierunkową
falę dźwiękową w mniejszym stopniu niż przedmioty zimne.
Temperatura powietrza i jego wilgotność wpływaja na czas trwanie
impulsu dźwiękowego. Wzrost temperatury powietrza o 20°C prowadzi
do wzrostu zakresu czujnika o kilka procent (3,5% do 8%) i
odczytywana odległość przedmiotu jest wtedy zaniżona.
- Izolatory dźwięku, dla których pochłanianie dźwięku przez niektóre
materiały (bawełna, tkaniny, guma, etc.), zmniejsza czułość czujnika,
która w przypadku czujnika dyfuzyjnego może okazać się niewystar-
czająca do wykrycia obiektu.
Czujniki ultradźwiękowe są szczególnie przydatne do wykrywania
twardych przedmiotów z płaską powierzchnią, prostopadłą do osi wy-
krywania. Wszystkie odstępstwa od tego mogą być przyczyną zakłó-
ceń pracy czujnika i tak:
- Kątowe położenie czoła przedmiotu względem osi odniesienia
czujnika. Kiedy kąt odbiega od 90°, fala odbita już nie wraca wzdłuż
osi czujnika, przez co zmniejsza się odległość wykrywania czujnika dy-
fuzyjnego. Jest to ważne zwłaszcza przy dużych zakresach pomiaro-
wych, kiedy to skręcenie obiektu nawet o 3° może być powodem jego
niewykrycie. Dla małych zakresów pomiarowych, czystych i niewielkich
przedmiotów dopuszczalne jest odchylenie nawet do 10°.
- Kształt przedmiotu. Przedmioty o powierzchniach usytuowanych
tak, że kierunek fali odbitej znacznie odbiega od osi fali emitowanej są
możliwe do wykrycia czujnikami pracującymi w trybie przelotowym lub
refleksyjnym.
Systemy i funkcje mechatroniczne - Podręcznik
Minos
- Powierzchnie płynów. Współczynnik odbicia fal ultradźwiekowych
od powierzchni płynnych jest taki sam jak dla ciał stałych. Łatwe do
wykrycia są wyrównane (niepofalowane) powierzchnie płynne.
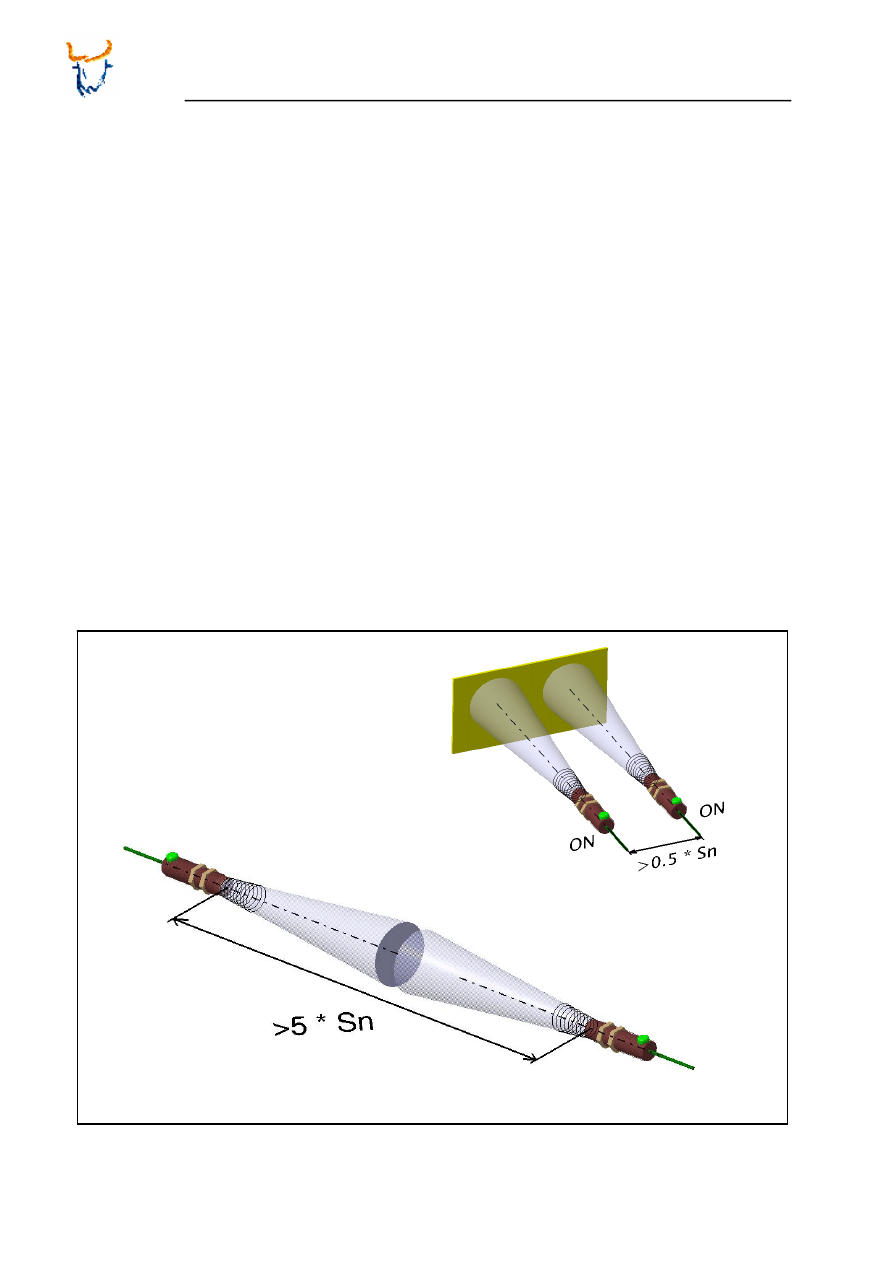
- Wzajemne oddziaływania czujników. Jeśli czujniki montowane są
zbyt blisko siebie, to odbita fala dźwiękowa, wyemitowana przez jeden
czujnik, może dotrzeć do drugiego i wywołać w nim nieuzasadnione
przełączenie wyjścia. Aby tego uniknąć, konieczne jest, przestrzeganie
zalecanych minimalnych odległości między czujnikami (rys. 3.10).
Rys. 3.10:
Zalecane odległości między czujnikami aktywnymi w tym samym czasie
42
Systemy i funkcje mechatroniczne - Podręcznik
Minos
3.6
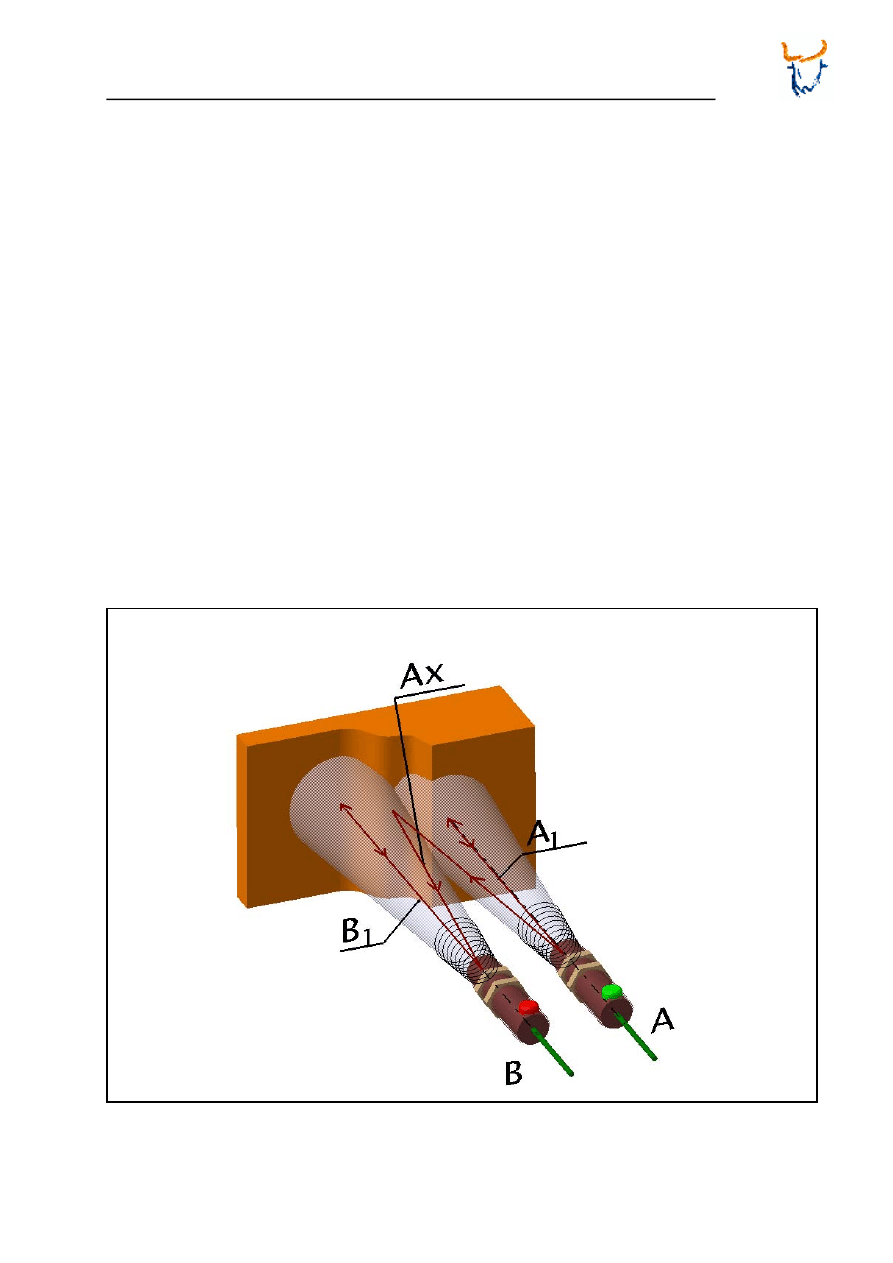
Synchronizacja czujników
Zsynchronizowanie dwóch lub większej liczby czujników, przez odpo-
wiednie połączenie ich wyjść, pozwala na montowanie ich nawet bar-
dzo blisko siebie, bez powodowania wzajemnej interferencji. Synchro-
nizacja zalecana jest wtedy, gdy czujniki emitują fale w tym samym
kierunku i wiązki ultradźwiękowe czujników częściowo się pokrywają.
Gdy włączona jest synchronizacja, wykrywany obiekt może znajdować
się przed włączonym czujnikiem i jednocześnie przed innym z nim
zsynchronizowanym. Dla przykładu z rys. 3.11, gdzie czujniki zamon-
towane są blisko siebie, do czujnika B docierają dwa echa B1 i Ax.
Echo A1 dociera jednak szybciej do czujnika A niż echo Ax i B1 do
czujnika B. Synchronizacja czujników sprawia, że czujniki reagują tylko
na pierwsze echo A1, co pozwala uniknąć wpływu innych przenikają-
cych się wiązek ultradźwiękowych na pracę czujników. Zsynchronizo-
wane czujniki wysyłają sygnały jednocześnie i funkcjonują jak jeden
czujnik o rozszerzonym stożku akustycznym, wykrywający ten sam
przedmiot.
Rys. .3.11:
Synchronizacja dwóch czujników umieszczonych blisko siebie i wykrywających ten
sam przedmiot
43
Systemy i funkcje mechatroniczne - Podręcznik
Minos
3.7
Specjalne czujniki ultradźwiekowe
3.7.1
Czujnik refleksyjny
Ultradźwiękowe czujniki refleksyjne (retro reflective sensors) bazują na
różnicy pomiędzy czasem powrotu fali dźwiękowej odbitej od
wykrywanego przedmiotu a czasem powrotu fali od reflektora. Rolę
reflektora może pełnić dowolna płaska i twardą powierzchnia. Fala
dźwiękowa odbita od przedmiotu musi wrócić do czujnika w ustalonym
czasie, krótszym niż odbita od reflektora. Nastąpi wówczas
przełączenie stanu wyjścia czujnika.
Czujniki refleksyjne mogą do wykrywania predmiotów wykorzystywać
też odbitą falę ultradźwiekową np. od dowolnej twardej i gładkiej
powierzchni. Jest to szczególnie przydatne w miescach o utrudnionym
dostępie (rys. 3.12). Czujniki mogą w tym układzie pracować zarówno
na zasadzie całkowitego przerwania wiązki jak i odbicia echa.
Ten rodzaj czujnika jest szczególnie przydatny do wykrywania takich
materiałów jak: bawełna, pianka, materiały tekstylne - pochłaniających
w znacznym stopniu dźwięk, oraz do wykrywania powierzchni
nieprostopadłych do osi czujnika.
Rys. 3.12:
Wykorzystanie odbitej fali ultradźwiękowej do wykrycia czujnikiem refleksyjnym
przedmiotów pochłaniających
44
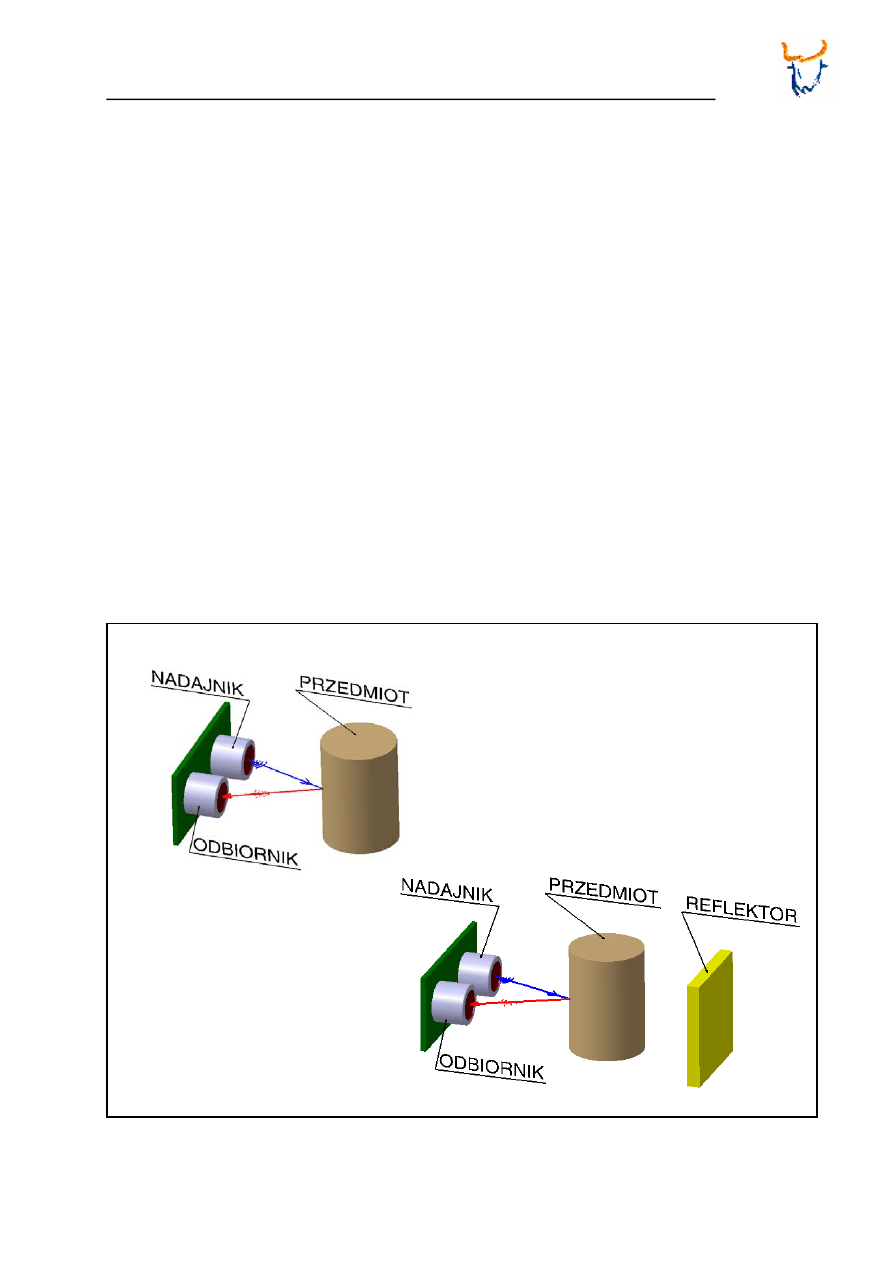
Systemy i funkcje mechatroniczne - Podręcznik
Minos
3.7.2
Czujniki z dwoma przetwornikami w jednej obudowie
Czujniki z dwoma przetwornikami w jednej obudowie mogą pracować
w trybie dyfuzyjnym i trybie refleksyjnym z reflektorem (rys. 3.13). Je-
den z przetworników pełni funkcje nadajnika a drugi odbiornika fali ul-
tradźwiękowej.
Pozwalają one wykrywać niewielkie przedmioty z bardzo małej odle-
głości, ponieważ odbiornik nie musi oczekiwać na zakończenie wysy-
łania impulsu generowanego przez nadajnik. Wymagana jest jednak
synchronizacja pracy obydwu przetworników.
Przedmioty walcowe mogą być wykrywane znacznie wcześniej od
przedmiotów płaskich. Przy płaskich przedmiotach odbite echo bardzo
łatwo wykracza poza strefę działania odbiornika.
a)
b)
Rys. 3.13:
Czujnik z dwoma przetwornikami: a) tryb dyfuzyjny, b) tryb refleksyjny
45
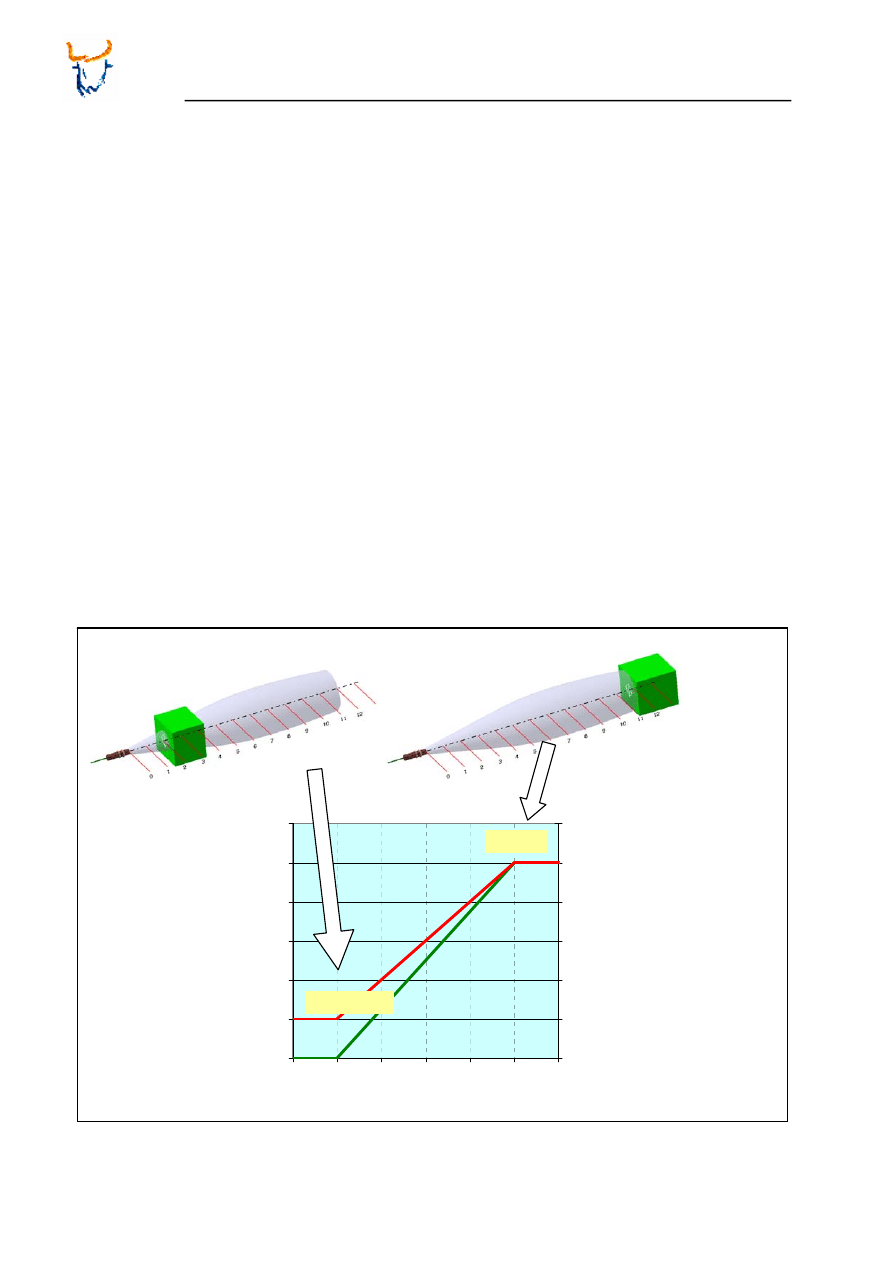
Systemy i funkcje mechatroniczne - Podręcznik
Minos
3.7.3
Czujniki z wyjściem analogowym
Większość czujników ultradźwiękowych wyposażona jest zarówno w
wyjścia dwustanowe jak i analogowe. Gdy zadaniem czujnika są po-
miary odległości wykorzystywane jest wyjście napięciowe lub prądowe.
Wielkość napięcia lub prądu wyjściowego jest proporcjonalna do mie-
rzonej odległości (rys. 3.14).
0
2
4
6
8
10
12
0
2
4
6
8
10
12
Zakres pomiarowy
U
[ V ]
0
4
8
12
16
20
24
I
[ mA ]
I
U
Początek
Koniec
Rys. 3.14:
Zmiany sygnału wyjściowego spowodowane zmianą odległości przedmiotu
46
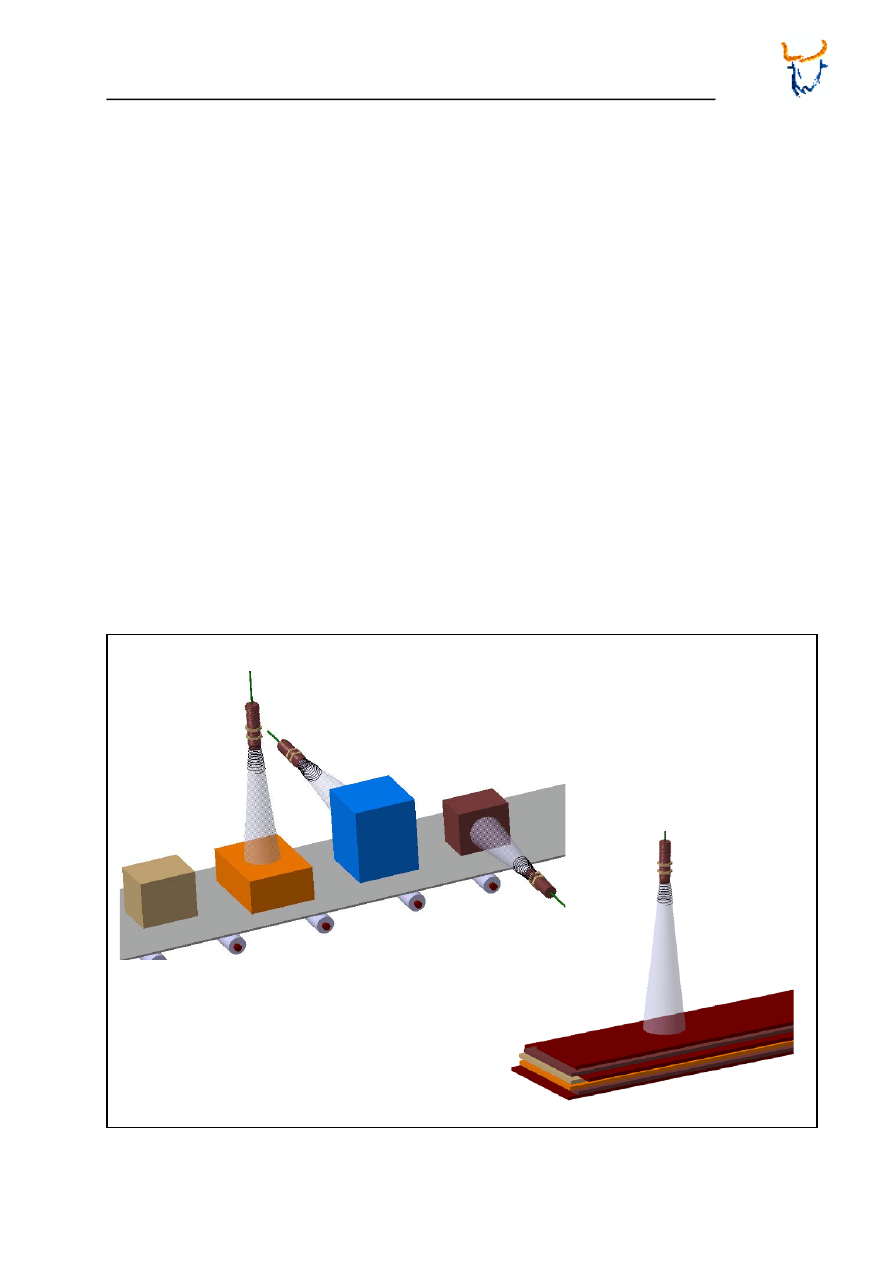
Systemy i funkcje mechatroniczne - Podręcznik
Minos
3.8
Aplikacje
Czujniki ultradźwiękowe mają szerokie zastosowanie w praktyce. Ce-
chuje je bowiem duża odporność na zakłócenia w strefie pomiarowej i
na zabrudzenia elementów czujnika. Pozwalają zdalnie wykryć, różno-
rodne przedmioty bez względu na ich:
- materiał (metal, plastik, drewno, tektura, etc.),
- naturę (stały, płynny, granulat etc.),
- kolor
- stopień przezroczystości.
W zastosowaniach przemysłowych mogą one służyć np. do obserwo-
wania:
- pozycji zespołu maszyny,
- strumieni przedmiotów na taśmie przenośnika,
- poziomu cieczy o różnych kolorach w naczyniach,
- poziomu granulatu w zasobnikach.
47
Rys. 3.15:
Czujniki ultradźwiękowe analogowe do pomiaru wielkości przedmiotów lub wyso-
kości stosu
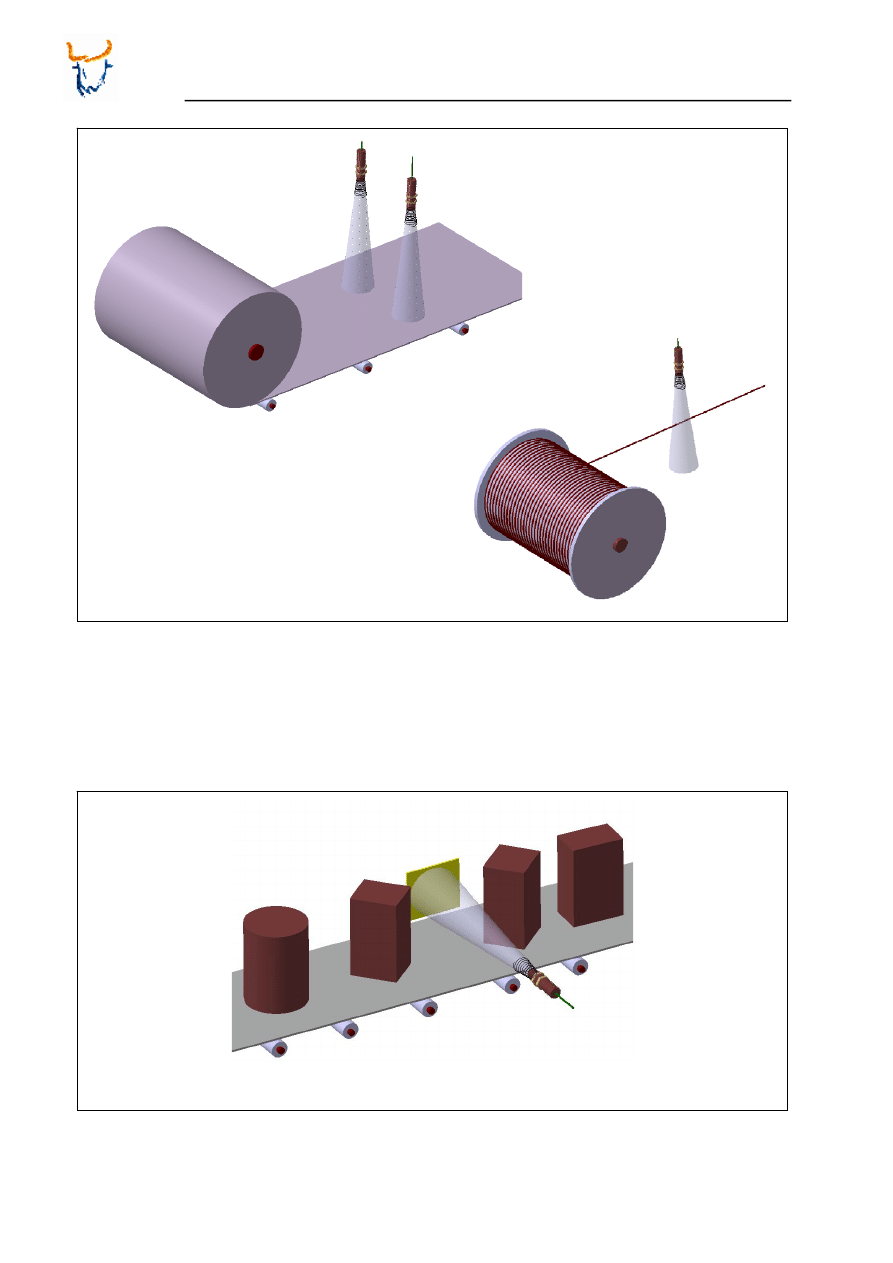
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Rys. 3.16:
Czujniki ultradźwiękowe dyfuzyjne wykorzystane do monitorowania uszkodzeń
taśmy lub przewodów
Rys. 3.17:
Zliczanie na taśmie elementów odbijających lub pochłaniających czujnikiem ultra-
dźwiękowym refleksyjnym
48
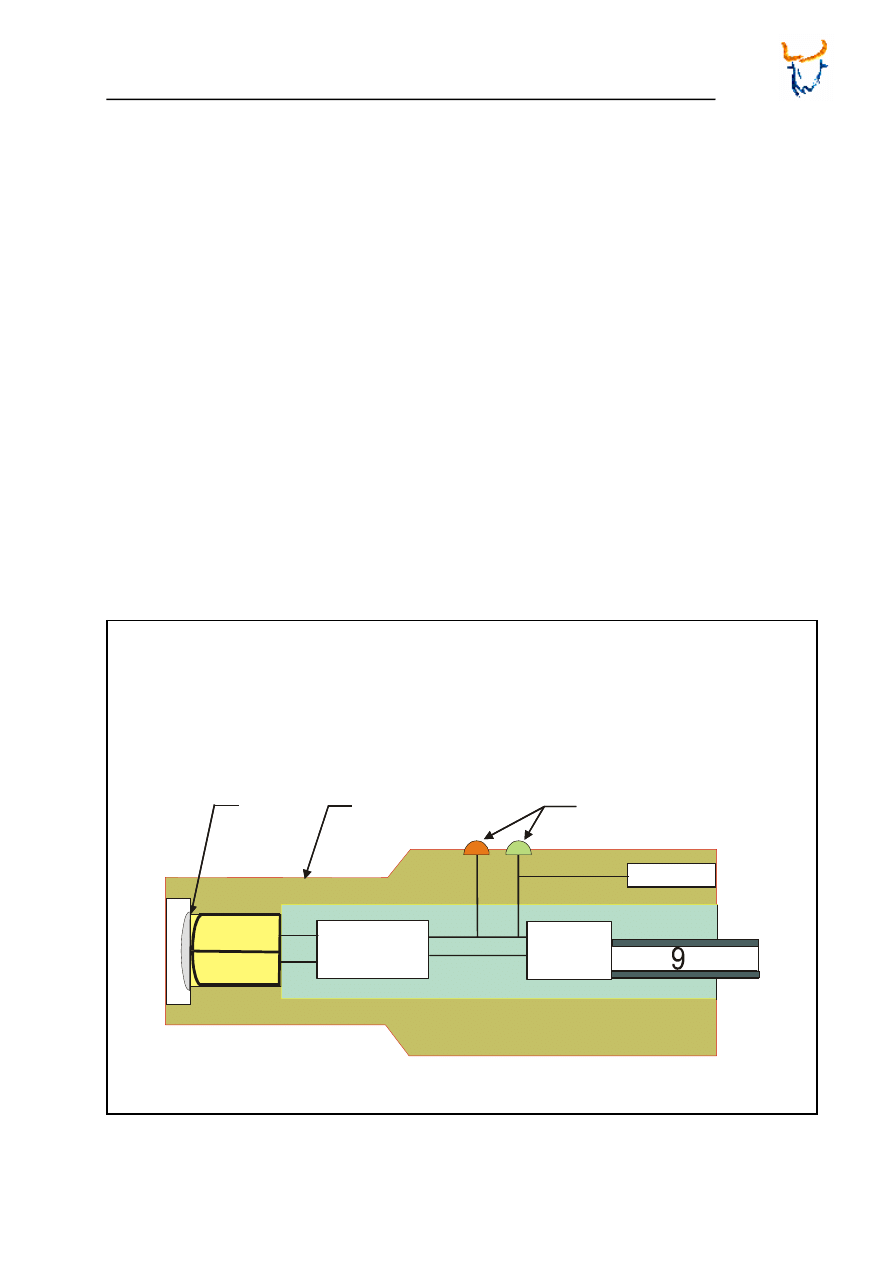
Systemy i funkcje mechatroniczne - Podręcznik
Minos
4
Czujniki fotoelektryczne
4.1
Charakterystyka konstrukcji
Czujniki fotoelektryczne są elementami automatyki wykorzystującymi
wiązkę światła do wykrywania obiektów znajdujących się w zasięgu ich
działania. Mogą one wykrywać obiekty wykonane z dowolnego mate-
riału, z odległości od kilku milimetrów do kilkudziesięciu metrów. Re-
agują one wówczas, gdy obiekt spowoduje przerwanie wiązki światła
emitowanej przez czujnik lub, gdy wiązka światła zostanie odbita od
powierzchni przedmiotu. Te zmiany sygnału świetlnego, są zamieniane
w czujniku na sygnał elektryczny i wykorzystane do sterowania stanem
wyjścia czujnika.
Podstawowe elementy czujnika to: źródło światła 1 i odbiornik światła
2, układy elektroniczne 3, układ wyjściowy 4, jedna lub dwie diody lu-
minescencyjne 5, sygnalizujące warunki pracy czujnika, potencjometr
6 do regulacji czułości, obudowa 7 i przeźroczysta osłona 8 (rys. 4.1).
2
1
3
4
6
5
8
7
2
1
3
4
6
5
8
7
Rys. 4.1:
Schemat budowy czujnika w obudowie cylindrycznej
49
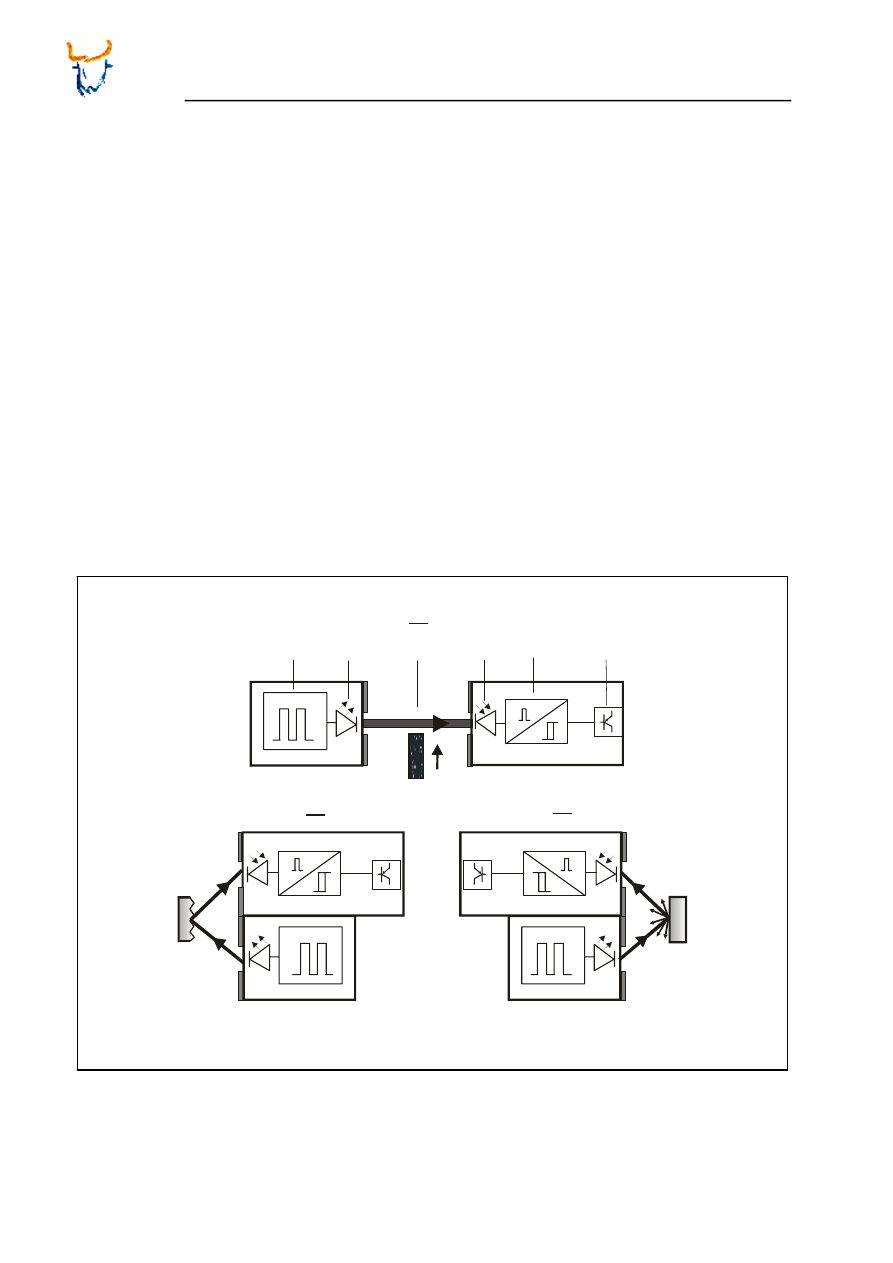
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Układy elektroniczne zawierają (rys. 4.2):
-
oscylator 3, pozwalający uzyskać modulowaną intensywność źródła
światła,
- demodulator 4,
dla separacji sygnału użytecznego.
Pozostałe elementy czujnika to emiter światła 1, odbiornik 2 i tranzy-
stor 5, stanowiący człon wyjściowy.
Wymienione elementy czujnika mogą być rozmieszczane w jednej
wspólnej obudowie lub w dwóch obudowach niezależnych, stosownie
do tego czy wykrywany obiekt 6 przerywa wiązkę światła czy ją odbija.
1
3
2
4
5
A
B
C
6
Rys. 4.2:
Podstawowe układy konstrukcyjne czujników fotoelektrycznych: A – Czujnik prze-
lotowy (Through-Beam Sensor), B – Czujnik refleksyjny (Retro-Reflective Sensor),
C – Czujnik dyfuzyjny (Diffuse Sensor)
50
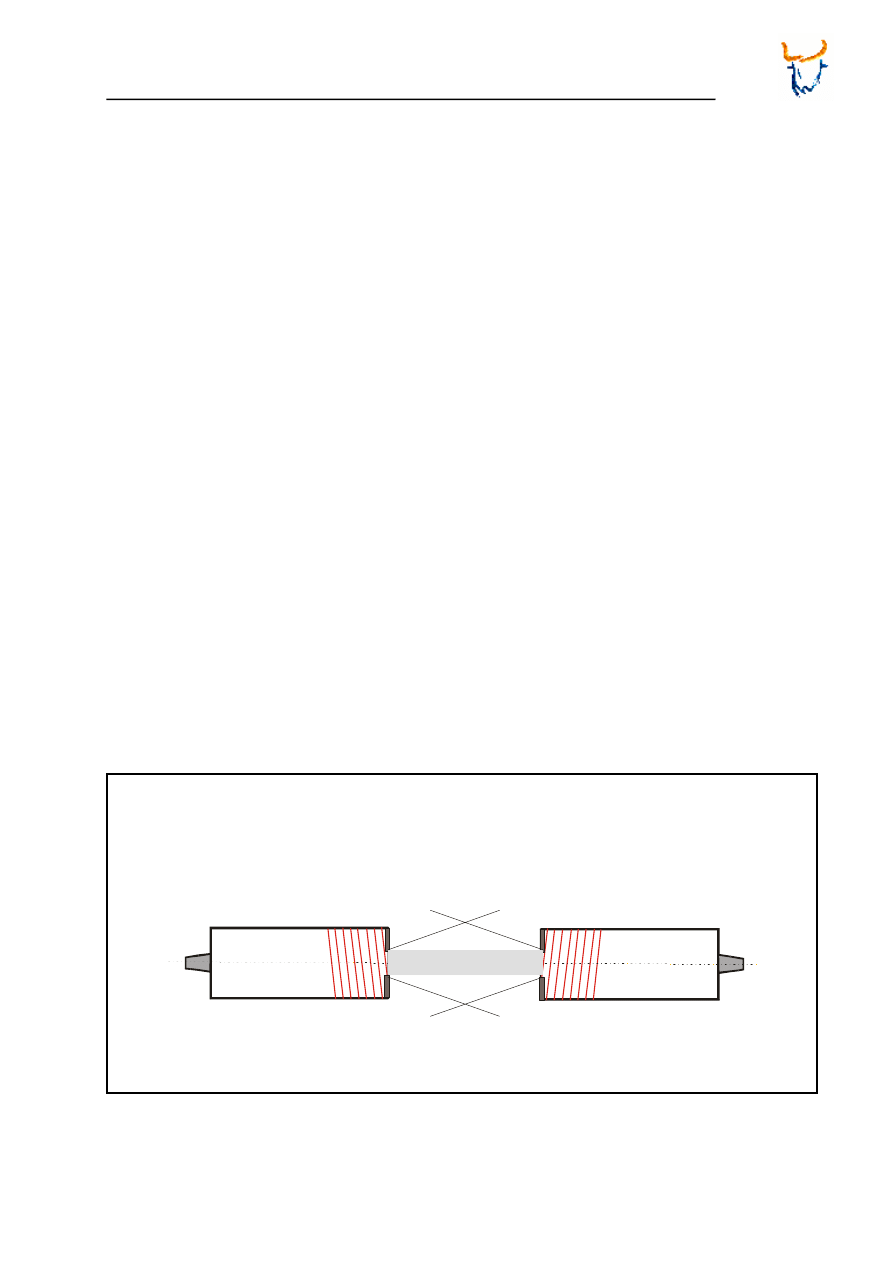
Systemy i funkcje mechatroniczne - Podręcznik
Minos
4.2 Podstawowe rodzaje czujników
4.2.1 Czujnik przelotowy
W czujnikach o działaniu przelotowym (thrugh beam sensors), nazy-
wanymi też thru-beam or transmitted beam, wiązka światła wysyłana
jest bezpośrednio z nadajnika do odbiornika, umieszczonych współo-
siowo w oddzielnych obudowach. Czujniki wykrywają obiekty pojawia-
jące się miedzy nadajnikiem a odbiornikiem, które przerywają bieg
promieni świetlnych i uaktywniają sygnał wyjściowy z odbiornika. Są
one bardzo mało wrażliwe na trudne warunki zewnętrzne jak: kurz w
powietrzu, brud na soczewkach, para albo mgła. Mają one najdłuższe
strefy działania (ponad 50m), w porównaniu z innymi odmianami czuj-
ników. Budowane są w dwóch podstawowych wersjach konstrukcyj-
nych, jako cylindryczne i prostopadłościenne.
Ważną cechą tych czujników jest to, że rodzaj materiału wykrywanego
obiektu nie ma żadnego znaczenia. Mogą to więc być powierzchnie
malowane, półprzeźroczyste, przeźroczyste, chropowate, gładkie, me-
talowe, plastikowe itp.
Efektywny strumień światła zależy od średnicy soczewek w nadajniku i
odbiorniku (rys. 4.3), a czujnik wykrywa zdarzenie wtedy, gdy cel przy-
słoni co najmniej 50% tego strumienia.
Odbiornik
(R)
Emiter
(E)
pole emitowane
Promień efektywny
pole widzenia odbiornika
Rys. 4.3:
Efektywny strumień światła oraz strumień emitowany przez nadajnik i pole widze-
nia odbiornika
51
Systemy i funkcje mechatroniczne - Podręcznik
Minos
4.2.2
Czujniki refleksyjne
W czujnikach refleksyjnych (retro-reflective sensors) nadajnik i odbior-
nik umieszczone są w jednej obudowie. Za pomocą reflektora światło
jest kierowane z powrotem do odbiornika. Przedmiot poruszający się w
kierunku wiązki światła rozprasza ją, co powoduje przełączanie stanu
wyjścia czujnika. Typowe czujniki refleksyjne wykonywane bez filtra
polaryzującego pracują w obszarze światła podczerwonego, a w ukła-
dzie z filtrem polaryzującym w obszarze światła widzialnego, najczę-
ściej z widzialnym światłem czerwonym. Zaletą tych czujników jest
stosunkowo duży zasięg dochodzący do 12 m oraz brak wrażliwości
na własności powierzchni obiektu i na jego kolor.
Czujniki te wymagają stosowania specjalnych konstrukcji reflektorów
(ang. reflektors) lub taśm odbijających (ang. reflective tapes) (rys. 4.4).
Promień światła wchodzący do tego układu jest całkowicie odbijany
przez wszystkie trzy powierzchnie i wychodzi równolegle do promienia
padającego. Elementarne układy trzech luster (triple mirrors) zesta-
wione w zespoły, tworzą powierzchnię reflektorów dla czujników re-
fleksyjnych.
W przeciwieństwie do zwykłego zwierciadła albo innych płaskich po-
wierzchni odbijających, reflektory te nie muszą być ustawione dokład-
nie prostopadle do sensora. Błąd ustawienia w granicach kilkunastu
stopni nie wpływa na poprawność pracy czujnika.
Efektywny strumień światła zależy od średnicy soczewek w nadajniku i
odbiorniku oraz od wielkości powierzchni reflektora.
a)
b)
Rys. 4.4:
Widok przykładowych: a) reflektorów, b) taśm reflek-
syjnych
.
52

Systemy i funkcje mechatroniczne - Podręcznik
Minos
53
4.2.3
Czujniki dyfuzyjne
Czujniki dyfuzyjne (diffuse sensors), nazywane też odbiciowe lub zbli-
żeniowe (reflex or proximity sensors), służą do bezpośredniego wy-
krywania przedmiotów. Ich podstawową zaletą, oprócz umieszczenia
nadajnika i odbiornika w jednej obudowie, jest rezygnacja z koniecz-
ności montażu reflektora. Nadajnik emituje światło, które odbite od
przedmiotu trafia do odbiornika i w efekcie tego generowany jest sy-
gnał wykrycia celu.
Czujniki dyfuzyjne mają niewielki zasięg roboczy (operating distance),
w granicach do 100mm, a niekiedy do 200mm. Przedmioty lub tło
znajdujące się poza tym zasięgiem nie są wykrywane, czyli ich zakłó-
cające oddziaływanie jest automatycznie tłumione. Pewien wpływ na
zasięg roboczy ma kolor jak i typ powierzchni. W zależności od wła-
sności przedmiotu współczynnik odbicia światła od celu może zmie-
niać się w szerokich granicach. Lśniące powierzchnie znajdujące się
nawet daleko od czujnika mogą odbić większość światła, sprawiając,
że wykrywanie właściwego celu może okazać się bardzo trudne. Po-
nadto czoło czujnika musi być możliwie dokładnie równoległe do po-
wierzchni celu odbijającego światło. Przedmioty ciemne lub matowe
mogą pochłonąć większość światła i pozostała odbijana ilość światła
może nie wystarczyć do wykrycia celu. W takich przypadkach można
posłużyć się specjalnymi odmianami czujników dyfuzyjnych omówio-
nymi w dalszej części.
Do wyznaczenia maksymalnej odległość wykrywania czujnika dyfuzyj-
nego stosuje się skalibrowaną rozpraszającą powierzchnię celu, którą
jest arkusz białego papieru lub papier firmy Kodak, odbijający około
90% strumienia światła.
4.3 Zapobieganie
interferencji
Czujniki fotoelektryczne z uwagi na zasadę pracy są wrażliwe na za-
kłócenia spowodowane interferencją optyczną od zewnętrznych źródeł
światła, naturalnych jak i sztucznych. Promienie świetlne docierające
od tych źródeł światła do czujników fotoelektrycznych mogą w istotny
sposób wpływać na natężenie prądu wytwarzanego przez emiter, a
tym samym spowodować błędne sygnały wyjściowe z czujnika. Aby
ograniczyć prawdopodobieństwo błędnych reakcji, czujniki są wyposa-
żane w układy eliminujące w pewnym zakresie tego typu zakłócenia i
szumy oraz układy dostrajające odpowiednio czułość czujnika. Dodat-
kowe problemy może stanowić zanieczyszczenie środowiska, np. olej,
pył, brud zalegający na powierzchniach wykrywanych przedmiotów lub
na soczewkach nadajnika i odbiornika.
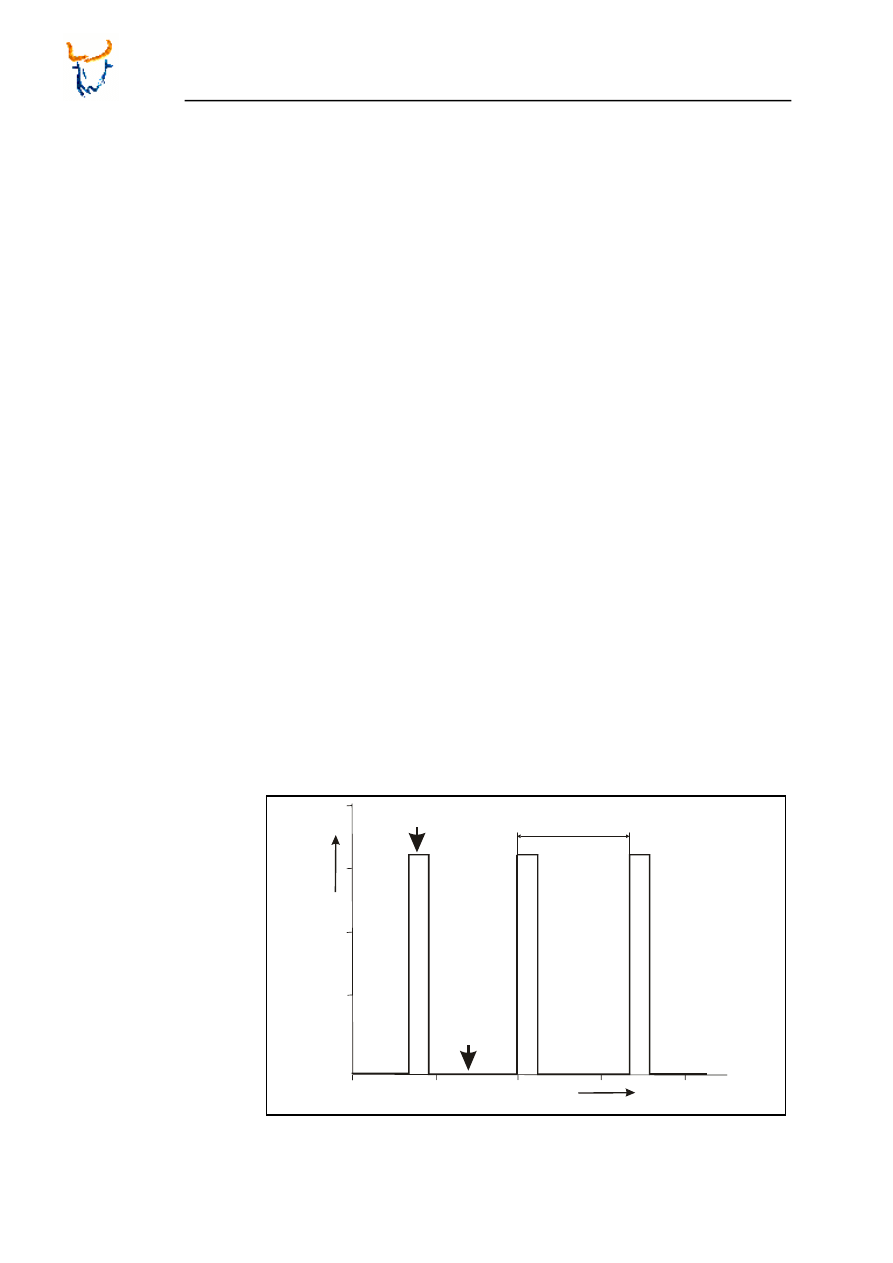
Systemy i funkcje mechatroniczne - Podręcznik
Minos
4.3.1 Modulacja
światła
Czujniki fotoelektryczne działają ze światłem modulowanym, które
sprawia, że są one w dużej mierze nieczułe na otaczające światło.
Oznacza to, że światło emitera jest włączane tylko na krótki okresu
czasu, wielokrotnie krótszy niż trwa przerwa między impulsami (rys.
4.5). Częstotliwość tak modulowanego sygnału świetlnego jest rzędu
kilku kHz. Niebezpieczeństwo wystąpienia interferencji z innym źró-
dłem światła może jednak wystąpić w przypadkach, gdy emiter i źródło
zakłócające będą pracowały z podobnymi częstotliwościami. Praca z
modulowanym światłem dostarcza następujących korzyści:
- czujniki są mniej czułe na otaczające światła,
- zwiększa się maksymalny zakres działania czujnika,
- zmniejsza się ilość generowanego ciepła, co przedłuża czas życia
diod LED.
Źródła światła LED (emitters) jak i odbiorniki (receivers) wyposażane
są w soczewki optyczne pozwalające na zawężanie emitowanego
strumienia światła oraz zawężanie pola widzenia odbiornika. Dzięki
temu można ograniczać zakres reagowania czujnika, a tym samym
zmniejszać wpływ promieniowania odbitego od przedmiotów znajdują-
cych się poza wyznaczonym obszarem. Równocześnie skupienie
światła przez soczewki znacznie zwiększa maksymalną odległość
między nadajnikiem a odbiornikiem lub nadajnikiem a powierzchnią, od
której światło jest odbijane. W niektórych zastosowaniach korzystniej-
sze mogą być elementy fotooptyczne bez soczewek (płaskie przeźro-
czyste okno), gdy potrzebne jest szerokie pole widzenia i krótki zasięg.
Emiter ON
czas
za
si
la
ni
e
e
mi
te
ra
Emiter OFF
T=1/f
Rys. 4.5:
Zasilanie emitera napięciem modulowanym
54

Systemy i funkcje mechatroniczne - Podręcznik
Minos
55
4.3.2
Polaryzacja światła
Standardowy czujnik refleksyjny (retro-reflective sensor) może spowo-
dować nieuzasadnioną reakcję w układzie wyjściowym w momencie
pojawienia się elementu błyszczącego w jego polu widzenia. Aby wy-
różnić odbicie światła od właściwego elementu wykrywanego spośród
innych odbieranych sygnałów świetlnych konieczne może okazać się
zastosowanie światła spolaryzowanego.
Polaryzacja polega na całkowitym lub częściowym uporządkowaniu
drgań fali świetlnej. Gdy światło nie jest spolaryzowane, drgania pola
elektrycznego i magnetycznego odbywają się w wielu kierunkach, na-
tomiast w przypadku światła spolaryzowanego, drgania te odbywają
się tylko w jednym kierunku.
Światło naturalne, w tym też światło emitowane przez diody LED, nie
jest spolaryzowane. Kiedy światło przejdzie jednak przez filtr polaryzu-
jący - pozostaje tylko ta część strumienia, która jest zgodna z kierun-
kiem polaryzacji zastosowanego filtru. Na rysunku 6.4.6a widoczna
jest wiązka światła po przejściu przez filtr o polaryzacji poziomej.
Ustawienie następnie na jej drodze filtru o polaryzacji pionowej spo-
woduje całkowite wygaszenie wiązki światła.
Odbicie dyfuzyjne (rozproszone) niszczy polaryzację (rys. 4.6b), a
niewielka ilość światła przechodząca przez polaryzator pionowy ma już
bardzo małą energię, zwykle niewystarczającą do wykrycia powierzch-
ni odbijającej światło.
Odbicie spolaryzowanego światła od powierzchni lustrzanej (rys. 4.6c)
nie niszczy polaryzacji, a polaryzator pionowy ustawiony na drodze
strumienia światła nie pozwala na przejście światła.
Te dwa zjawiska pozwalają wykorzystać światło spolaryzowane w
czujnikach refleksyjnych z reflektorem. Za pomocą doboru i ustawienia
odpowiednich filtrów możliwe jest uniknięcie zakłóceń spowodowanych
przez powierzchnie zwierciadlane, jak też wykrywanie elementów
przeźroczystych. Filtry polaryzacyjne wykonuje się najczęściej z folii
polimerowych.
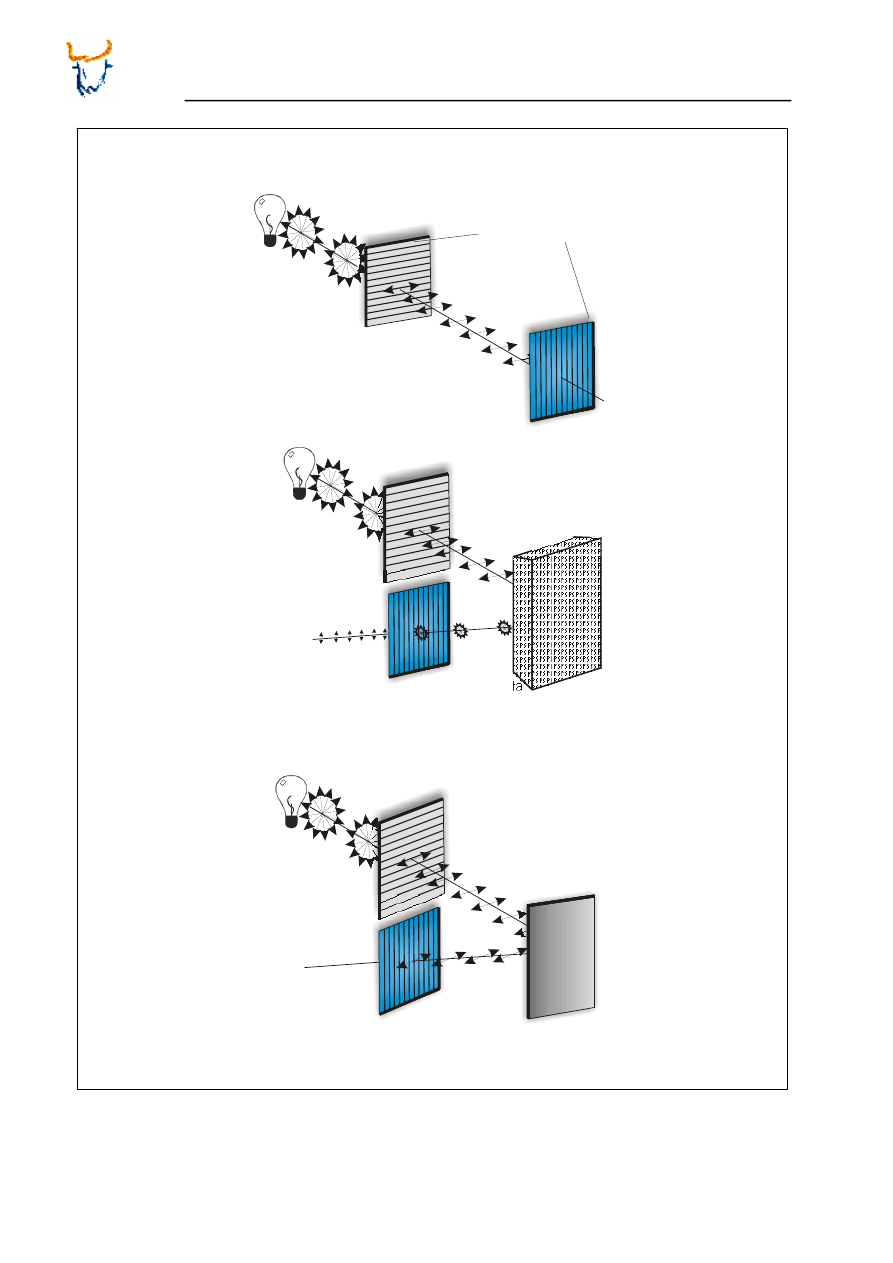
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Źródło
światła
Światło białe
Filtry polaryzujące
Powierzchnia dyfuzyjna
b)
Światło spolaryzowane
Filtry polaryzujące
Depolaryzacja światła
Powierzchnia lustrzana
c)
a)
Źródło
światła
Źródło
światła
Światło białe
Światło białe
Światło
spolaryzowane
Filtry polaryzujące
Światło spolaryzowane
Rys. 4.6:
Polaryzacja światła z pomocą filtrów: a) wygaszanie światła za pomocą dwóch
filtrów, b) odbicie światła spolaryzowanego od powierzchni rozpraszającej, c) od-
bicie światła spolaryzowanego od powierzchni lustrzanej
56
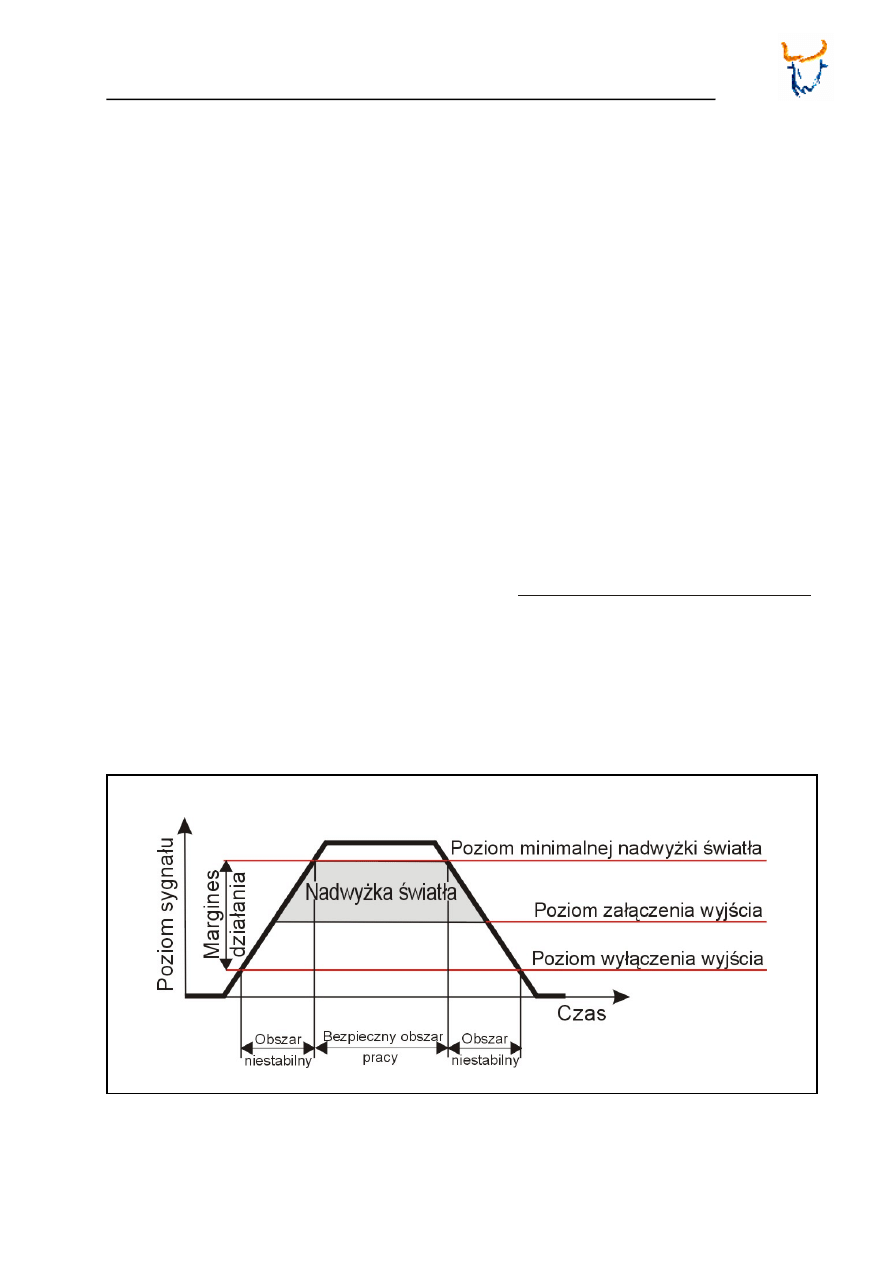
Systemy i funkcje mechatroniczne - Podręcznik
Minos
4.4.
Margines działania
Ilość światła padającą na element fotoelektryczny czujnika, a tym sa-
mym poziom sygnału na jego wyjściu może w wyniku oddziaływań ze-
wnętrznych ulec zmniejszeniu np. w wyniku zabrudzenia optyki czujni-
ka, zmiany współczynnika odbicia światła od przedmiotu lub starzeniu
się emitera. Wówczas poziom sygnału może okazać się niewystarcza-
jący do przełączenia stanu wyjścia, co spowoduje niepoprawną pracę
czujnika. Aby unikać takich sytuacji powinno dysponować się pewną
nadwyżką poziomu sygnału, określaną przez margines działania (rys.
4.7).
Kiedy na odbiornik w ogóle nie pada światło wówczas margines dzia-
łania równa się zero. Margines działania równy 1 odpowiada sytuacji,
gdy ilość padającego na odbiornik światła jest już wystarczająca, aby
przełączyć stan wyjścia (z OFF na ON albo z ON na OFF). Aby dys-
ponować pewną rezerwą wartość tego marginesu powinna być więk-
sza od 1 - co oznacza, że rzeczywista ilość padającego światła prze-
kracza minimalny poziom wymagany do przełączenia stanu wyjścia.
Definiuje ją zależność:
Margines Działania=
Aktualna ilość wykrywanego światła
Minimalna ilość światła
wymagana do zmiany stanu wyjścia
Rys. 4.7:
Zależność bezpiecznego obszaru pracy czujnika fotoelektrycznego od marginesu
działania
57
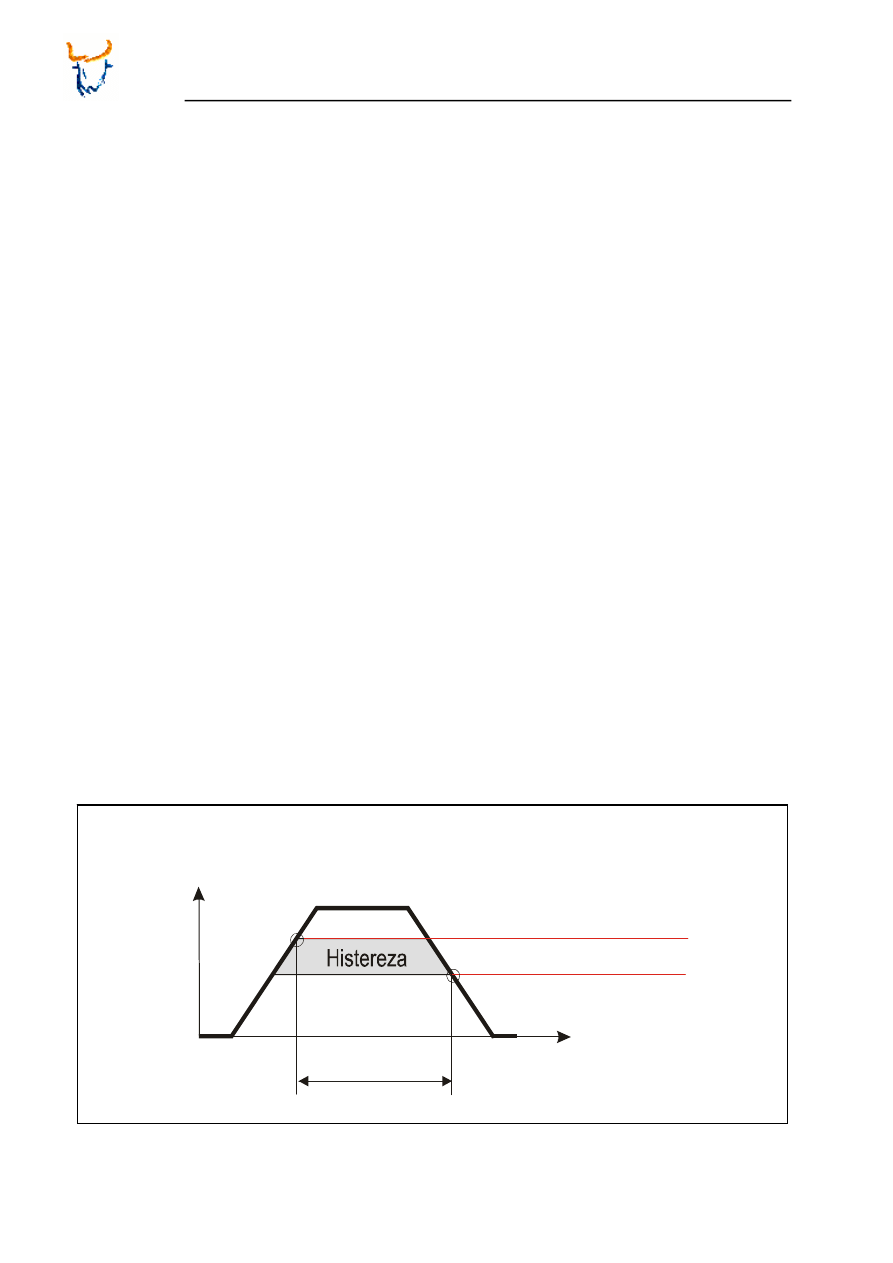
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Jeśli ogólne warunki, w jakich pracuje czujnik są znane, to wyznaczo-
na z powyższego wzoru wymagana nadwyżka światła stanowi zabez-
pieczenie przed nadmiernym tłumieniem energii światła padającego na
odbiornik. Im ta nadwyżka będzie większa tym praca czujnika będzie
bardziej niezawodna. W aplikacjach, w których ryzyko przypadkowego
zmniejszenia się ilości światła padającego na odbiornik jest duże, wy-
magany jest większy margines działania niż w aplikacjach, w których
jest to mniej prawdopodobne. Dla czystego powietrza oraz małego
prawdopodobieństwa zabrudzenia soczewek czy reflektora minimalny
margines działania nie powinien być mniejszy od 1,5. W warunkach
środowiska bardzo zabrudzonego i przy ograniczonych możliwościach
czyszczenia soczewek minimalny margines działania powinien prze-
kraczać nawet 50.
Obwód wykrywania nadwyżki światła w czujniku, wyposażony np. w
migającą diodę, sygnalizuje niestabilne warunki pracy, gdy ilość świa-
tła padającego na czujnik jest niewystarczająca, tj. spada poniżej war-
tości wymaganej do zmiany stanu wyjścia.
Dla czujników dyfuzyjnych pewne znaczenie może mieć też zróżnico-
wanie poziomów sygnału potrzebnych do załączenia obwodu wyjścio-
wego i jego wyłączenia, czyli histereza (rys. 4.8). Odległość robocza
czujnika od obiektu wykrywanego zawsze odnosi się do poziomu sy-
gnału w punkcie załączenia (swith ON).
Histereza zwiększą się wraz z oddalaniem się wykrywanego przedmio-
tu od czujnika.
Po
zi
om
s
ygn
ał
u
Czas
Poziom załączenia wyjścia ON
Poziom wyłączenia wyjścia OFF
Wyjście załączone
Rys. 4.8:
histereza przełączania czujnika typu dyfuzyjnego
58
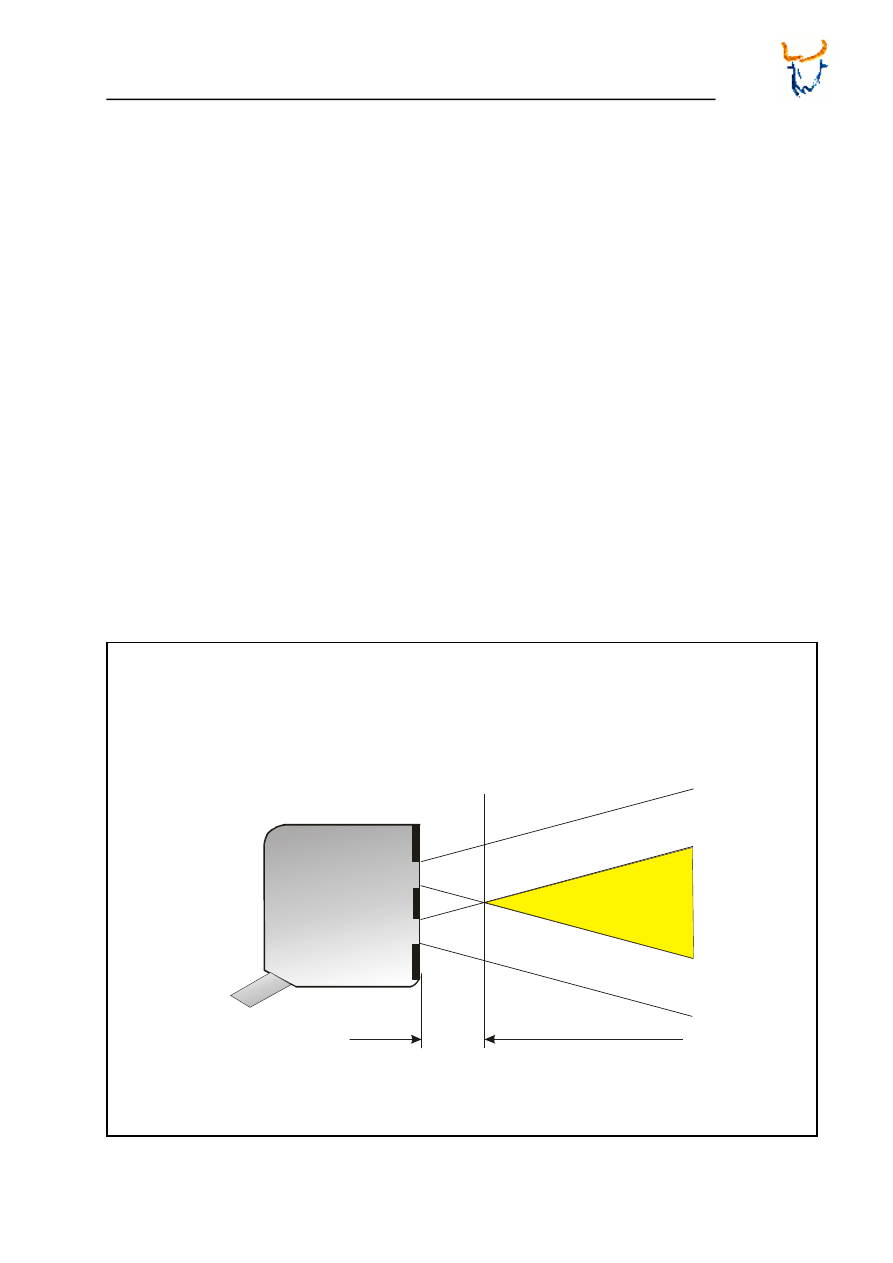
Systemy i funkcje mechatroniczne - Podręcznik
Minos
4.5.
Odległość robocza
Ważną cechą czujników fotoelektrycznych zbliżeniowych jest ich za-
sięg działania, wyznaczony przez maksymalną odległość roboczą. Dla
czujników przelotowych jest to maksymalna odległość między emite-
rem a odbiornikiem, dla czujników refleksyjnych odległość między
czujnikiem i reflektorem, a dla czujników dyfuzyjnych odległość między
czujnikiem a standardowym przedmiotem. We wszystkich przypadkach
odpowiada ona maksymalnej użytecznej odległości detekcji.
Ze względu na konstrukcję czujników refleksyjnych i dyfuzyjnych, w
których emiter i odbiornik umieszczone są w jednej obudowie występu-
je też minimalna odległość detekcji, poniżej której przedmiot już nie
może zostać wykryty (rys. 4.9).
Odbiornik (R)
Emiter (E)
Minimalna
odległość detekcji
martwa
strefa
Rys. 4.9:
Minimalna odległość detekcji w czujnikach interferencyjnych i dyfuzyjnych
59
Systemy i funkcje mechatroniczne - Podręcznik
Minos
4.6
Czas reakcji
W aplikacjach, w których mają być wykrywane bardzo małe przedmio-
ty, lub przedmioty poruszające się z dużymi prędkościami, istotne zna-
czenie może mięć „czas reakcji” (Response time) zastosowanego
czujka fotoelektrycznego – czujnik musi zdążyć zareagować, czyli
przełączyć stan wyjścia z ON na OFF lub z OFF na ON.
Czas reakcji jest czasem liczonym od pojawienia się wiązki światła
między emiterem i odbiornikiem, do zmiany stanu wyjścia przełączni-
ka. Czas potrzebny na zmianę stanu wyjścia po usunięciu wykrytego
obiektu nazywany jest „czasem wyzwalania” (Realase time). Te czasy
nie zawsze są sobie równe.
Wartości maksymalne czasów reakcji/wyzwalania podawane są w da-
nych technicznych dla każdego typu i rodzaju czujnika, jednak pewne
odchylenia od podawanych wartości są nieuniknione. Powodem tych
odchyleń jest impulsowe zasilanie emitera, którego częstotliwość trud-
no jest zsynchronizować z ruchem wykrywanego przedmiotu.
Znajomość czasu reakcji może pomóc w określeniu, jak długo poru-
szający się przedmiot musi pozostawać w polu widzenia czujnika, aby
został wykryty przez czujnik - czyli z jaką maksymalnie prędkością mo-
że się poruszać lub też jak duże odstępy między kolejnymi przedmio-
tami muszą być przewidziane. Możną to sprawdzić korzystając ze
wzoru na obliczanie czasu pozostawania wykrywanego przedmiotu w
polu widzenia czujnika.
Czas przesuwania się
przedmiotu przed czujnikiem
Szerokość przedmiotu
Prędkość liniowa przedmiotu
=
Tak obliczony czas powinien być wyraźnie dłuższy od wartości katalo-
gowych „czasu reakcji” zastosowanego czujnika.
Jeśli odstępy między wykrywanymi przedmiotami są mniejsze od sze-
rokości obiektu to bardziej krytycznym będzie czas przebywania prze-
rwy w polu widzenia czujnika, wyznaczany ze wzoru:
Czas przesuwania się
odstepu przed czujnikiem
Szerokość odstępu
Prędkość liniowa przedmiotu
=
Wówczas tak wyznaczony czas powinien być również wyraźnie dłuż-
szy od wartości katalogowych „czasu reakcji” zastosowanego czujnika.
60
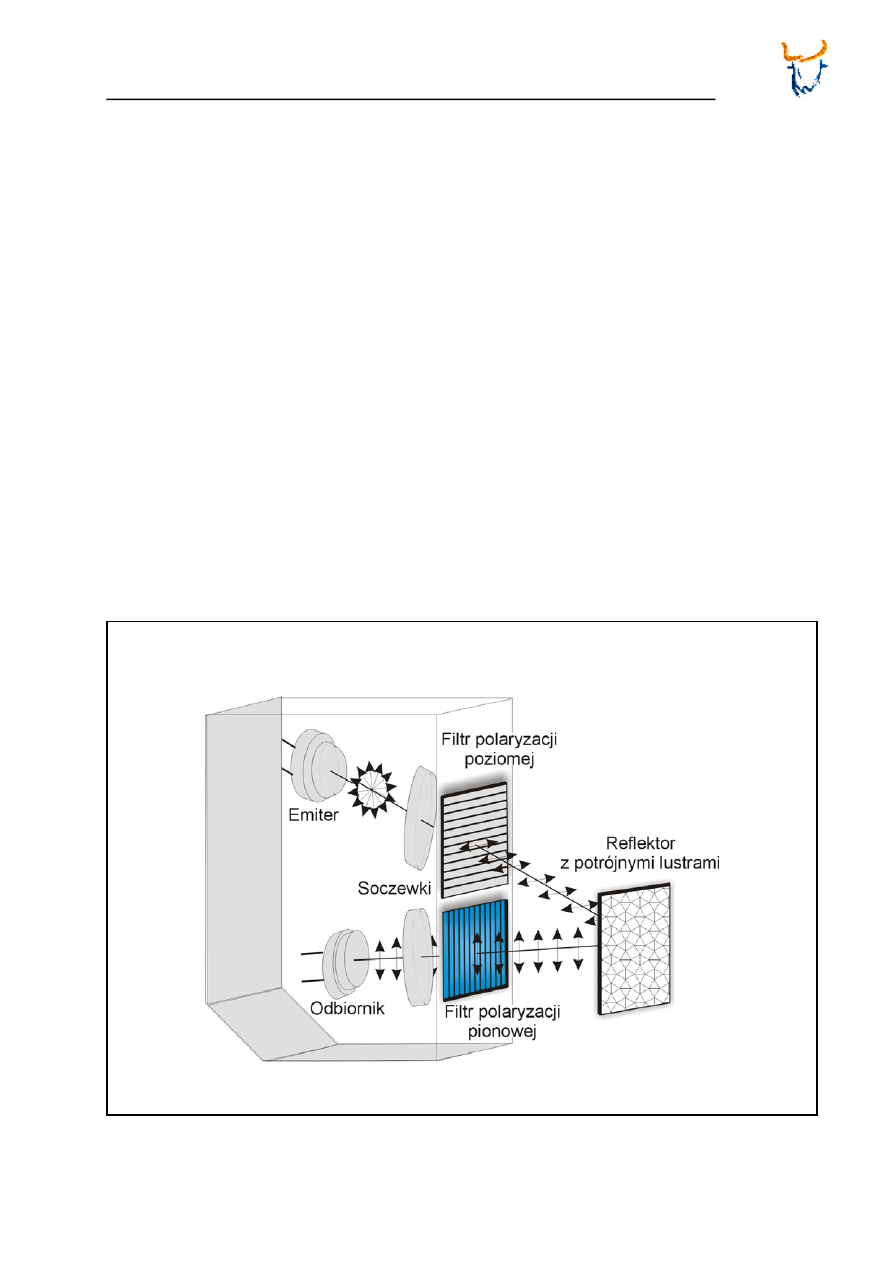
Systemy i funkcje mechatroniczne - Podręcznik
Minos
4.7
Specjalne rodzaje czujników
4.7.1
Czujniki refleksyjne z polaryzacją światła
W czujnikach refleksyjnych wykorzystujących zjawisko polaryzacji,
światło emitera skupiane jest przez soczewkę i kierowane przez filtr
polaryzacji poziomej na reflektor z potrójnymi lustrami (rys. 4.10). Po-
trójne lustra stosowane w reflektorach mają dodatkową ważną cechę,
gdyż zmieniają polaryzację promienia światła o 90
o
. Część odbitych od
reflektora promieni światła dociera do odbiornika przechodząc przez
drugi filtr o polaryzacji pionowej. Filtry są dobrane i ustawione tak, że
tylko światło odbite od reflektora dociera do odbiornika a nie światło
odbite od innych przedmiotów znajdujących się w zasięgu czujnika.
W czujnikach pracujących ze światłem spolaryzowanym należy liczyć
się z pewnymi stratami intensywności emitowanego światła spowodo-
wanymi przez filtry polaryzujące. Efektem tego jest o 30% – 40% krót-
szy ich zasięg niż standardowych czujników refleksyjnych. Jako źródła
światła stosowane są na ogół diody LED emitujące światło widzialne
czerwone.
Rys. 4.10:
Czujnik refleksyjny z polaryzacją światła i zespołem potrójnych zwierciadeł
61
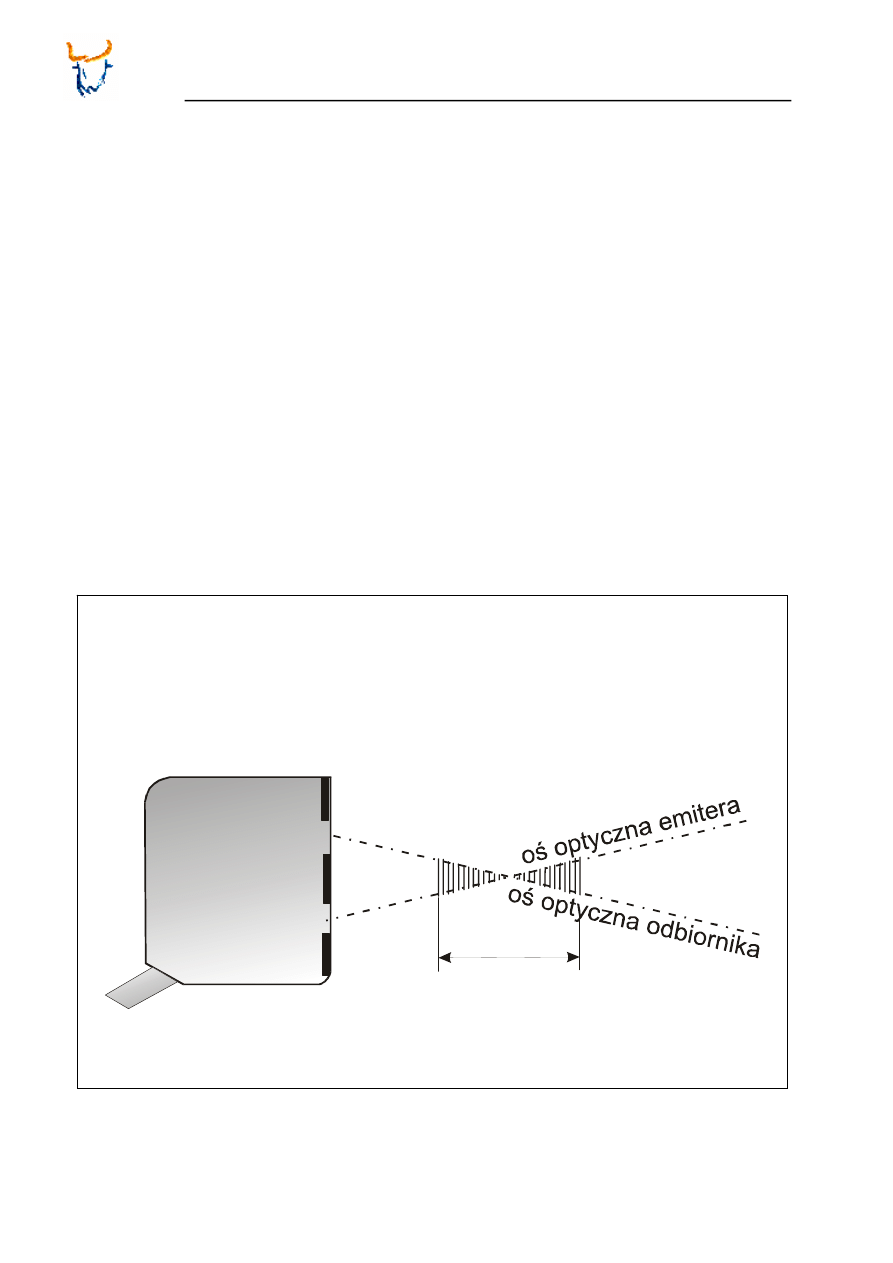
Systemy i funkcje mechatroniczne - Podręcznik
Minos
4.7.2
Czujniki dyfuzyjne z eliminacja wpływu tła i pierwszego planu
Szereg typów czujników dyfuzyjnych ma możliwość ustawiania (sen-
ding widows) maksymalnej i minimalnej odległości, z jakiej jeszcze są
wykrywane obiekty (rys. 4.11). Nie ma to związku z czułością odbiorni-
ka, lecz realizowane jest przez mechaniczną zmianę ustawienia so-
czewek, zmianę kąta ustawienia odbiornika lub kąta ustawienia dodat-
kowego zwierciadła. Cecha ta jest szczególnie ważna, gdy za rozpo-
znawanym obiektem znajduje się powierzchnia silnie odbijająca świa-
tło, co mogłoby zakłócić proces rozpoznawania właściwego obiektu.
Ustawienie w takim przypadku maksymalnej odległości reagowania
czujnika mniejszej niż odległość powierzchni zakłócającej (odległość
tła), prowadzi do wyeliminowania jej oddziaływania. Rozpoznawane są
wówczas tylko obiekty znajdujące się przed określoną wcześniej odle-
głością maksymalną – tłem (.background suppression).
Odbiornik (R)
Emiter (E)
okno
wykrywania
Rys. 4.11:
Ograniczenie obszaru aktywnego przez doprowadzenie do przecięcia się osi
optycznych nadajnika i odbiornika
62

Systemy i funkcje mechatroniczne - Podręcznik
Minos
63
Jeszcze bardziej skuteczną jest metoda elektronicznej eliminacji wpły-
wu tła, w której czujnik widzi tło, ale potrafi je zignorować. Przykładem
takich rozwiązań może być czujnik dyfuzyjny z dwoma odbiornikami
światła lub czujnik triangulacyjny wyposażony w kamerę CCD bądź
przetwornik PSD. W pierwszym przypadku rozpoznawanie obiektu
oparte jest na porównywaniu ilości światła padającego na każdy z od-
biorników, w drugim zaś na pomiarze odległości obiektu od czujnika i
porównaniu jej z ustaloną wcześniej.
Czujniki z elektroniczną eliminacją wpływu tła mogą pracować w jed-
nym z trzech trybów (rys. 4.12):
• zabezpieczenie przed wykryciem obiektu 3 znajdującego się poza
obszarem wykrywania (background),
• zabezpieczenie przed wykryciem obiektu 2 znajdującego się przed
ustalonym obszarem wykrywania (foreground),
•
wykrywanie tylko obiektu 1 znajdującego się w zdefiniowanym ob-
szarze (funkcja okna).
Dla położenia obiektu w odległości:
• mniejszej od Lmin - eliminowany jest wpływ promieni światła wysy-
łanych z przed obszaru wykrywania,
• większej od Lmax – eliminowany jest wpływ promieni światła wysy-
łanych z za obszaru wykrywania,
• większej od Lmin a mniejszej od Lmax - eliminowany jest zarówno
wpływ promieni światła wysyłanych z przed jak i z za obszaru wy-
krywania.
System optyczny czujnika triangulacyjnego sprawia (rys. 4.12), że im-
puls świetlny emitowany z diody laserowej jest promieniem skupionym,
prawie równoległym. Na styku jego trajektorii z obiektem 1 jest on dy-
fuzyjnie odbijany, a część tego odbitego światła pada na PSD (Position
- Sensitive Device) lub kamerę CCD - znajdujące się w tej samej obu-
dowie. Zależnie od odległości obiektu 1 od urządzenia, światło pada w
określone miejsce PSD/CCD. Obwód analizujący porównuje sygnał
otrzymany z założoną wcześniej odległością roboczą (dostosowaną za
pomocą wbudowanego potencjometru) i jeśli odległość przedmiotu
zawiera się w ustalonym obszarze to wyjście czujnika jest przełącza-
ne.
W przeciwieństwie do normalnego czujnika dyfuzyjnego, odległość ro-
bocza mało zależy od wielkości celu albo koloru, czy też własności je-
go powierzchni. Przedmiot może więc zostać łatwo wykryty, nawet
wbrew świecącemu tłu.
Czujniki te są niezastąpione przy wykrywaniu asortymentu przemiesz-
czającego się w pobliżu tła lub podłoża, którego czujnik nie powinien
wykrywać oraz przy wykrywaniu poziomu cieczy nieprzeźroczystej.
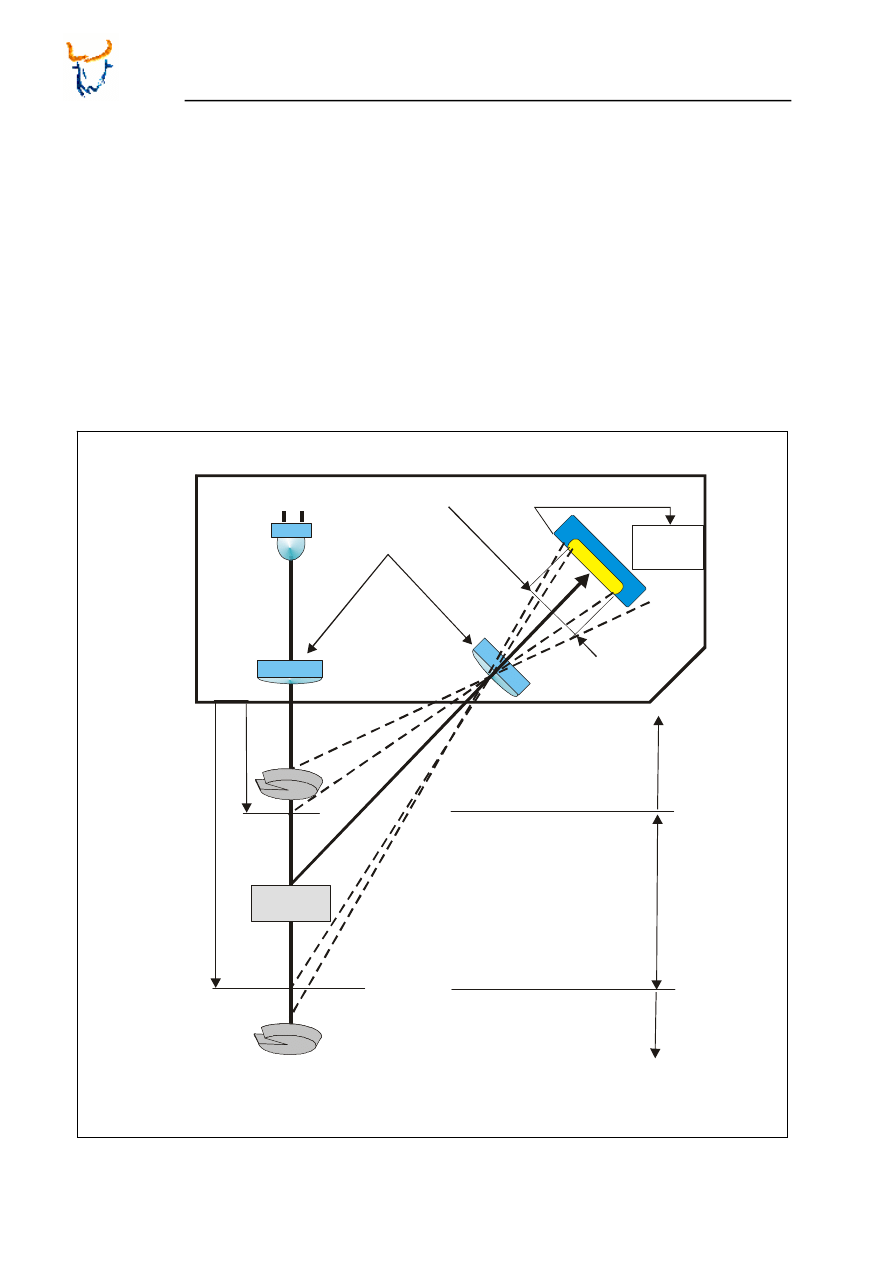
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Czujniki dyfuzyjne z eliminacją wpływu tła praktycznie wykrywają jed-
nakowo obiekty jasne i ciemne. Dla czujników odbiciowych z elimina-
cją wpływu tła strefa działania dla papieru czarnego skraca się nie-
znacznie (tylko o około 5%).
Źródła światła LED jak i odbiorniki wyposażane są w soczewki optycz-
ne pozwalające na zawężanie emitowanego strumienia światła oraz
zawężanie pola widzenia odbiornika. Dzięki temu można ograniczać
zakres reagowania czujnika, a tym samym również zmniejszać wpływ
zakłóceń od promieniowania odbitego od przedmiotów znajdujących
się poza tym obszarem.
Wyjście
Odbiornik CCD lub PSD
obszar eliminacji
pierwszego planu
LD (Dioda laserowa)
Optyka
obiekt 1
za
kre
s p
om
iarow
y
L
min
L
max
obszar eliminacji
tła
obszar wykrywania
Obiekt 3
Obiekt 2
Rys. 4.12:
Czujnik triangulacyjny z elektroniczną eliminacją tła
64
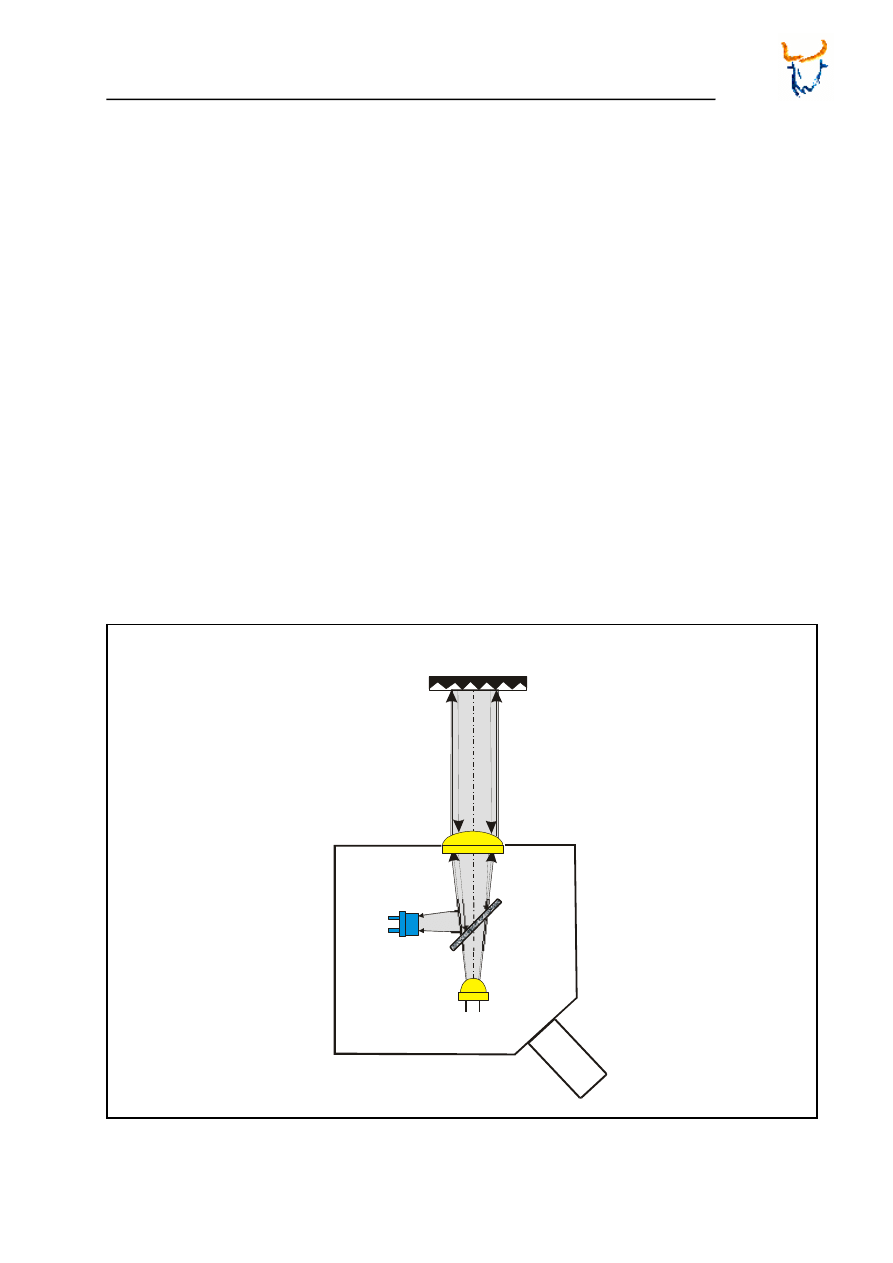
Systemy i funkcje mechatroniczne - Podręcznik
Minos
4.7.3
Czujniki refleksyjne z autokolimacją
Autokolimacja polega na samoczynnym przekształcaniu rozbieżnej
wiązki światła w wiązkę równoległą, co nawet przy małej średnicy
wiązki zapewnia wystarczającą ilość światła kierowaną na odbiornik.
Wykorzystanie zjawiska autokolimacji pozwala wykrywać przedmioty
(cele) przeźroczyste, jak i znajdujące się bardzo blisko czujnika, w tzw,
martwej strefie, występującej w czujnikach standardowych.
Czujniki fotoelektryczne refleksyjne wykorzystujące prawo autokolima-
cji bazują na tym, że osie optyczne kanałów wysyłania i odbierania
światła są identyczne. Jest to możliwe, gdyż światło w kanale odbior-
czym jest odchylane z pomocą półprzeźroczystego lustra (semi-
transparent mirror) tak, aby trafiło do odbiornika przesuniętego wzglę-
dem emitera o 90
o
(rys. 4.13). Szczególnie dobrze współpracują one z
reflektorami foliowymi.
Lustro
Emiter
Odbiornik
Soczewka
Reflektor z potrójnymi zwierciadłami
emitowana/odbita
wiązka
wiązka
emitowana
wiązka
odbita
Rys. 4.13:
Czujnik refleksyjny z autokolimacją
65
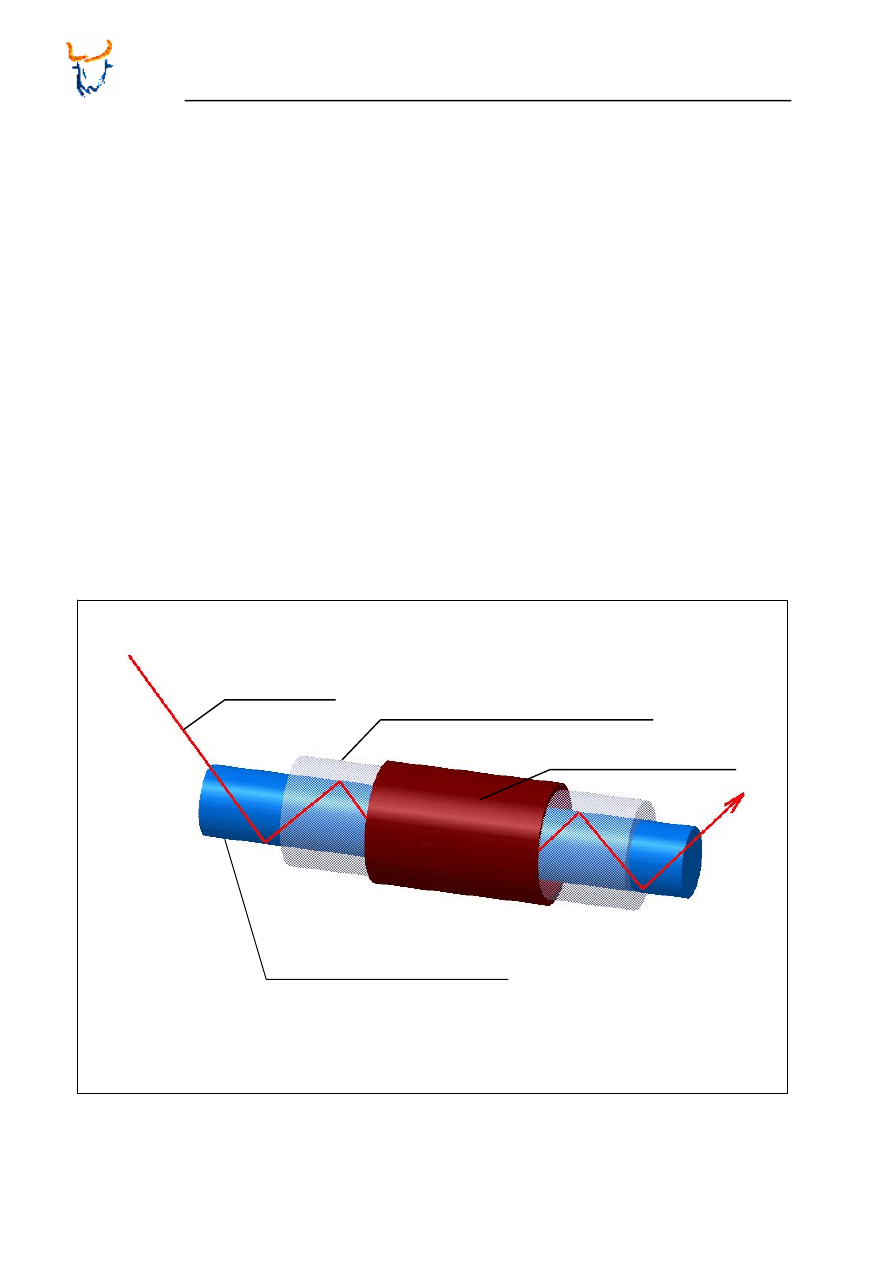
Systemy i funkcje mechatroniczne - Podręcznik
Minos
4.8
Czujniki ze światłowodami
4.8.1
Światłowody
Światłowody służą do przesyłania fal elektromagnetycznych o często-
tliwościach fal świetlnych lub zbliżonych do fal świetlnych. Najprost-
szym światłowodem jest pręt wykonany ze szkła lub tworzywa sztucz-
nego o płaskich powierzchniach końcowych, stanowiący rdzeń świa-
tłowodu. Otoczony on jest płaszczem z innego szkła lub tworzywa
sztucznego o mniejszym współczynniku załamania światła (rys. 4.14).
Istotą działania takiego światłowodu jest wykorzystanie efektu całkowi-
tego wewnętrznego odbicia, które następuje, gdy światło pada na gra-
nicę dwóch ośrodków o różnych wartościach współczynnika załamania
światła. Całkowite wewnętrzne odbicie oznacza, że 100% energii wiąz-
ki świetlnej po odbiciu od granicy wraca do światłowodu.
Promień światła będzie odbity tylko wtedy od warstwy granicznej, gdy
przychodzi on z ośrodka o większym współczynniku załamania światła.
Ponadto transmitowane będą tylko te promienie, które padają na po-
wierzchnię czołową włókna pod kątem mniejszym od kąta graniczne-
go, zależnego od stosunku współczynników załamania światła płasz-
cza i rdzenia.
n
1
> n
1
Płaszcz
współczynnik załamania
–
n
2
Rdzeń
współczynnik załamania
–
n
1
Warstwa ochronna
Promień
światła
Rys. 4.14:
Propagacja światła w rdzeniu światłowodu
66
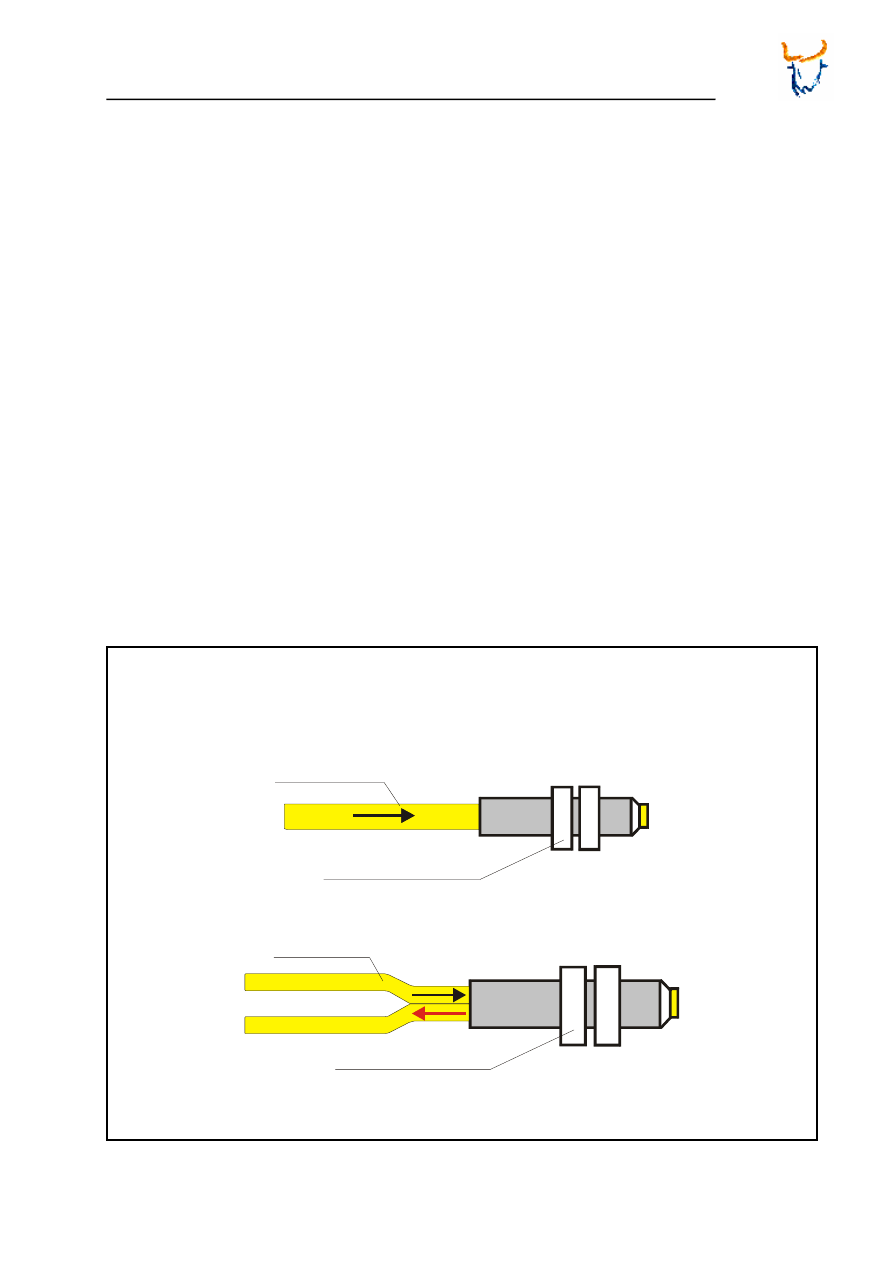
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Średnica rdzenia światłowodu, czyli tej jego części, która transmituje
światło, zawiera się w zakresie pomiędzy 5
µm dla światłowodu ze
szkła kwarcowego do ok. 1 mm dla światłowodów z tworzyw sztucz-
nych. Stosowanie małych przekrojów włókien, zwłaszcza w światłowo-
dach szklanych, czyni je bardzo elastycznymi i można je praktycznie
dowolnie wyginać.
Światłowody stosowane do transmisji światła mogą zawierać jedno,
dwa lub większą liczbę włókien.
Szklane światłowody są trwalsze niż plastikowe i w wykonaniu stan-
dardowym wytrzymują temperaturę do 250
o
C, a plastikowe tylko około
70
o
C Światłowody plastikowe są natomiast bardziej wytrzymałe, tań-
sze i łatwiej jest je skracać przez obcięcie końców. Szklany światłowód
skutecznie transmituje światło widzialne jak i promienie podczerwone.
Światłowody plastikowe mają jednak małą sprawność przy transmisji
promieni podczerwonych. W konsekwencji, włókna szklane mogą być
stosowane do światła widzialnego i podczerwieni, a światłowody pla-
stikowe są odpowiednie tylko dla transmisji światła widzialnego.
Przewody światłowodowe zakończone są cylindryczną głowicą meta-
lową lub rozgałęźnikiem (bifurcated), umożliwiającym ich zamocowa-
nie. Są dwa podstawowe typy kabli światłowodowych: przelotowy i
rozwidlony (rys. 4.15). Kable przelotowe wykonywane są ze światło-
wodów jedno rdzeniowych (Single cored) a kable rozwidlone z dwu lub
wielordzeniowych (Double cored or Multi cored).
a)
Głowica odbiornika
Światłowód
b)
Światłowód
Głowica wykrywająca
Rys. 4.15:
Typy kabli światłowodowych a) - przelotowy, b) - rozwidlony
67
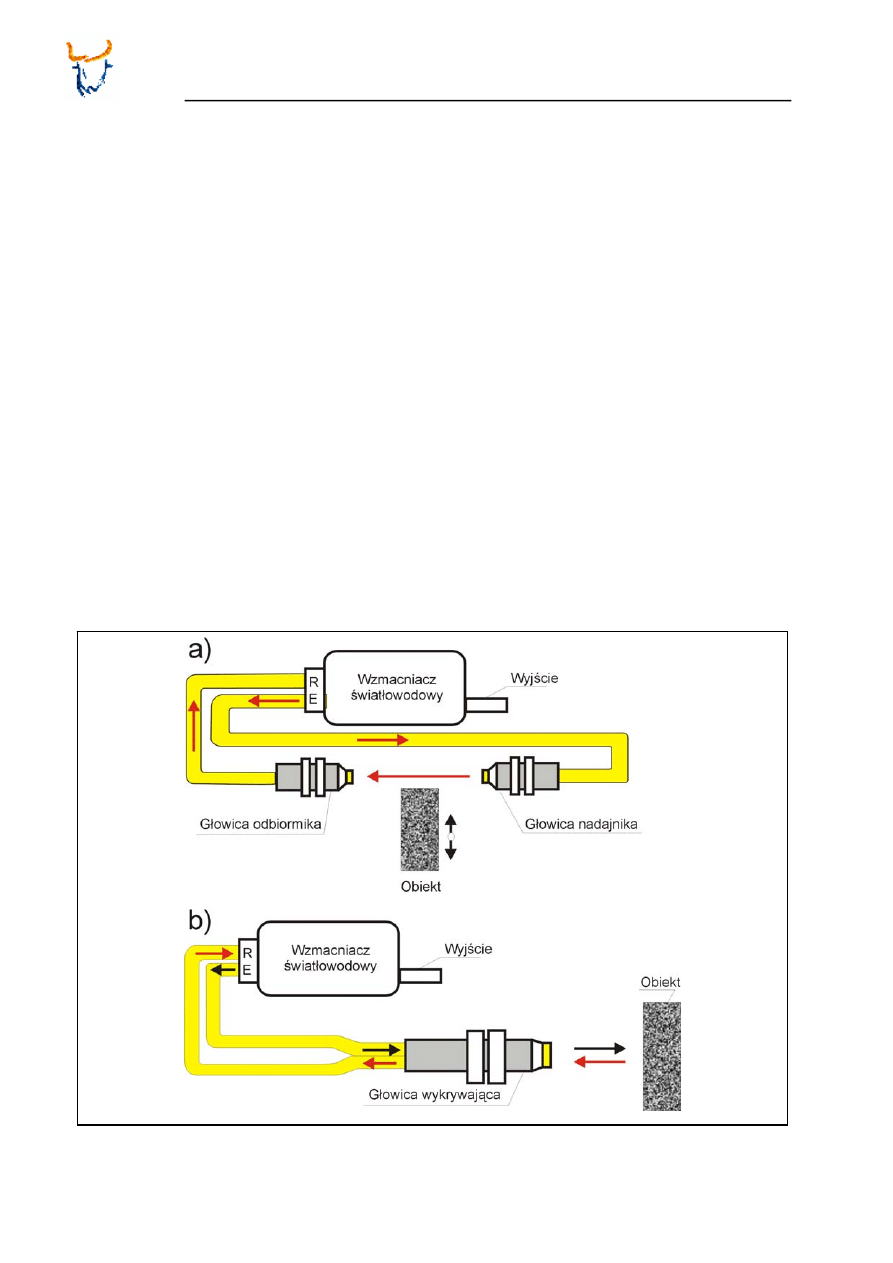
Systemy i funkcje mechatroniczne - Podręcznik
Minos
4.8.2
Zasada działania
Zasada działania fotoelektrycznych czujników ze światłowodami jest
taka sama jak innych czujników fotoelektrycznych. Różnica polega tyl-
ko na tym, że światło emitowane i odbierane transportowane jest przez
światłowód. Metalowe zakończenie światłowodu jest bardzo małe (rzę-
du kilku mm) i dzięki temu może być umieszczane w trudno dostęp-
nych miejscach, z dala od optoelektronicznych obwodów czujnika,
umieszczonych w osobnym wzmacniaczu (rys. 4.16).
Dwa światłowody przelotowe ustawione naprzeciw siebie realizują
funkcję czujnika przelotowego (trough beam sensor). Wiązka światła
przechodzi między dwoma kablami światłowodowymi i kiedy przerwa-
na zostanie wiązka od emitera do odbiornika - obiekty są wykrywane.
Kable typu rozwidlonego mają dwie oddzielne wiązki przyłączone do
jednej końcówki, pełniącej rolę głowicy wykrywającej (sensing head).
Jedna połówka wiązki światłowodowej służy do transmisji emitowane-
go promienia, a drugą promień wraca do odbiornika. Obiekty są wy-
krywane, gdy emitowane światło jest odbite od obiektu.
Rys. 4.16:
Typy czujników ze światłowodami a) – przelotowy, b) – dyfuzyjny
68

Systemy i funkcje mechatroniczne - Podręcznik
Minos
69
Zredukowany wymiar końcówki światłowodu pozwala wykrywać bar-
dzo małe przedmioty i może być instalowany w miejscach, w których
inne sensory nie mogłyby się zmieścić. Ponadto mogą być stosowane
w miejscach o dużym ryzyku eksplozji, jak również w płynach i mają
bardzo wysoką odporność na uszkodzenia mechaniczne i wibracje.
Odporność na drgania sprawia, że mogą być też montowane na ru-
chomych mechanizmach.
Źródłem światła w czujnikach ze światłowodami może być dioda LED
czerwona lub na podczerwień, standardowa średnica zewnętrzna ka-
bla wynosi 2,2 mm, a długość kabli światłowodów nie przekracza na
ogół 2 m.
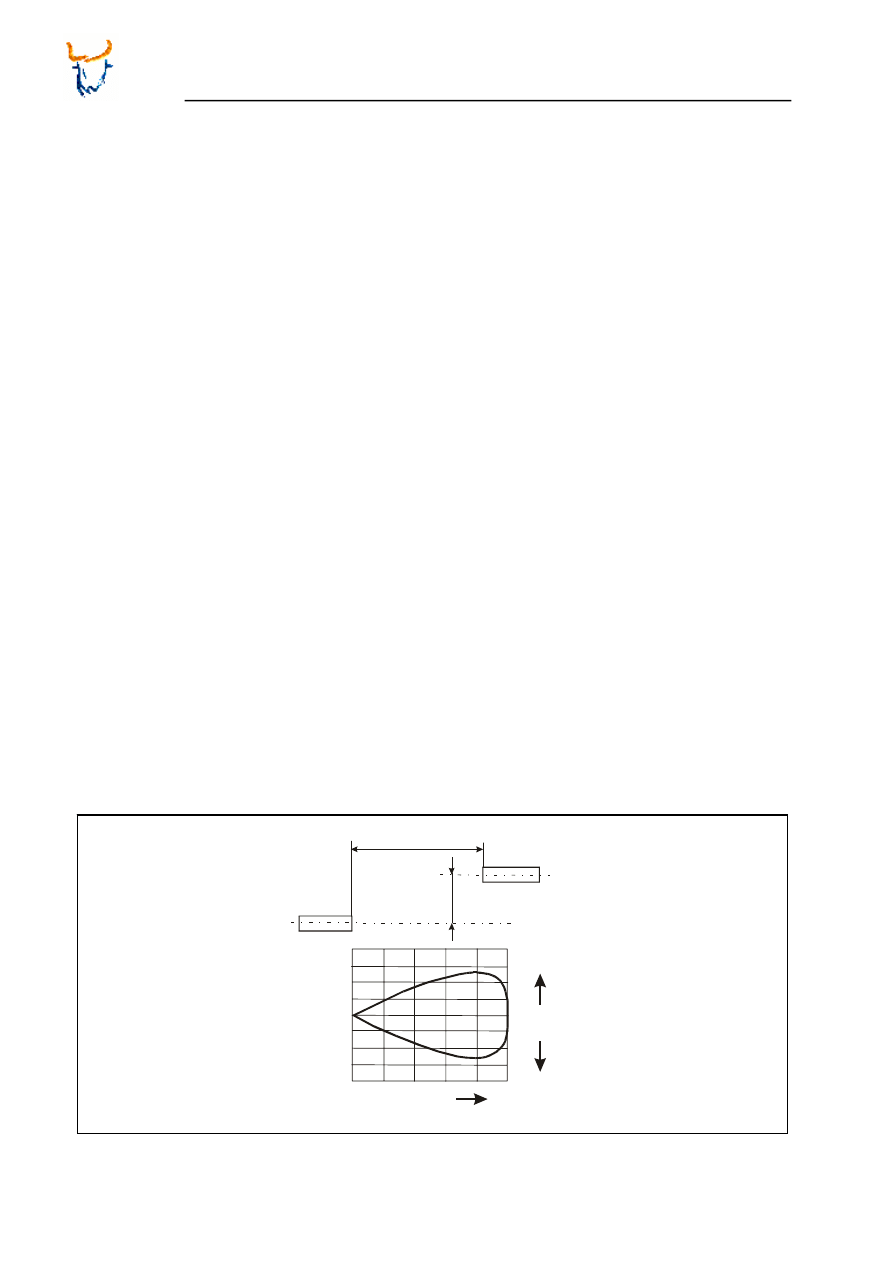
Systemy i funkcje mechatroniczne - Podręcznik
Minos
4.9
Technika połączeń
4.9.1
Typy połączeń
Czujniki fotoelektryczne mogą pracować w jednym z dwóch trybów
pracy:
o
tryb ciemny (DO) (dark operate),
o
tryb jasny (LO) (light operate).
W trybie ciemnym wyjście czujnika jest aktywne (ON), gdy światło emi-
tera nie dociera do odbiornika. Odpowiada to sytuacji „wyjście normal-
nie otwarte NO” w czujnikach indukcyjnych i pojemnościowych. W try-
bie jasnym wyjście jest aktywne, kiedy światło dociera z emitera do
odbiornika – sytuacja „wyjście normalnie zamknięte NC” w czujnikach
indukcyjnych i pojemnościowych.
4.9.2
Przełączanie wyjścia czujnika
Każdy czujnik fotoelektryczny posiada charakterystyczną dla siebie
strefę przełączania stanu wyjścia. Wielkość oraz kształt tej strefy zale-
ży od średnicy wiązki światła wysyłanego przez emiter oraz odległości
wykrywanego obiektu od czujnika. W przypadku czujników przeloto-
wych istotna jest odległość odbiornika światła od emitera. Aby nastąpi-
ło przełączenie stanu wyjścia to wykrywany przedmiot lub emiter musi
znajdować się w strefie przełączania.
Strefę przełączania wyjścia podczas przesuwania przedmiotu wzglę-
dem czujnika lub emitera względem nadajnika można przedstawić za
pomocą tzw. wykresu odpowiedzi (rys. 4.17).
Odbiornik
Emiter
Odległość X
0
0
Emiter
Odbiornik
X
Y
+Y
-Y
Rys. 4.17:
Przykład wykresu odpowiedzi dla czujników przelotowych
70
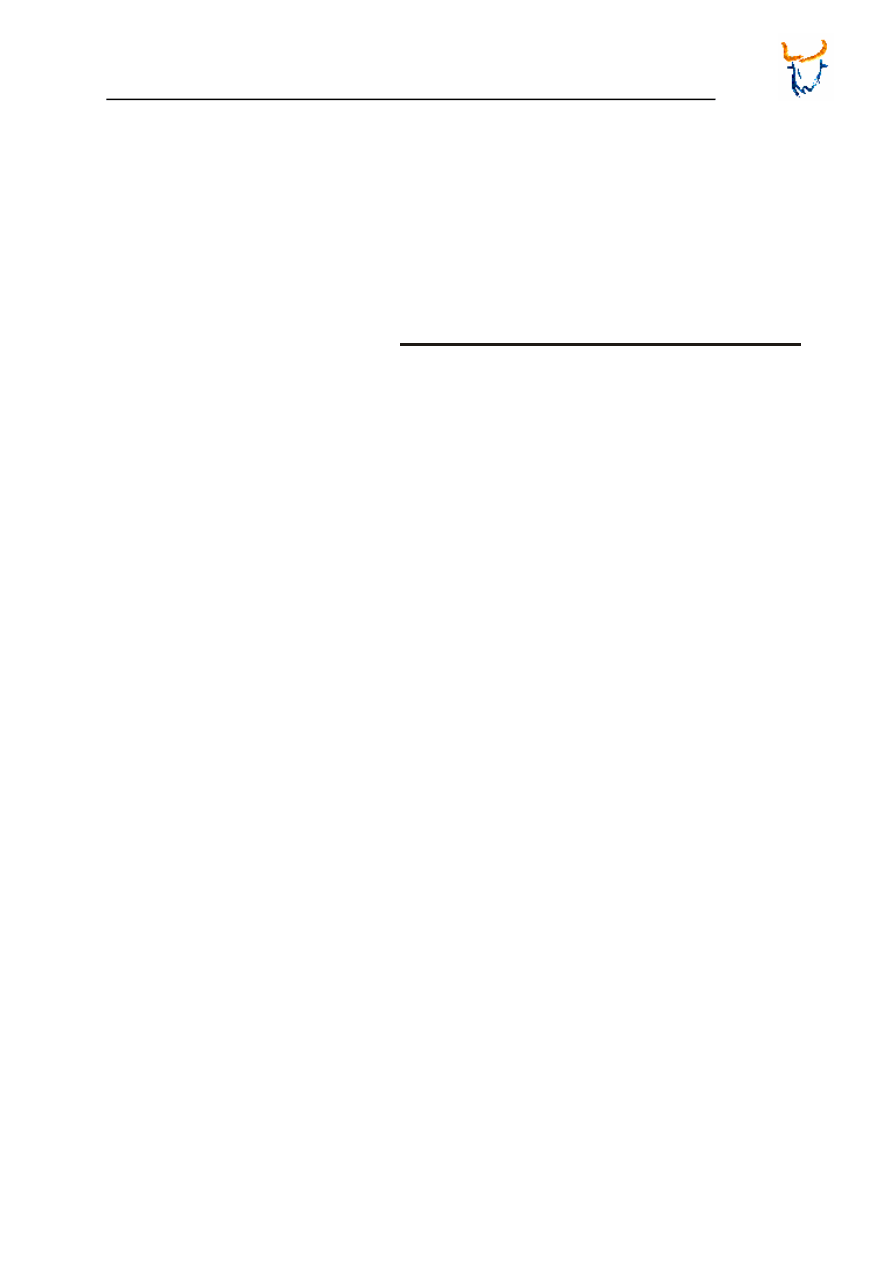
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Ważną cechą wszystkich czujników detekcyjnych jest maksymalna
częstotliwość przełączeń. Jest to maksymalna możliwa liczba przełą-
czeń wyjścia czujnika w ciągu jednej sekundy, wyrażana w Hz. Mak-
symalną częstotliwość przełączeń dla czujników fotoelektrycznych wy-
znacza się na podstawie czasów reakcji (Response time) i/lub czasów
wyzwalania (Realase time), podawanych przez producentów dla każ-
dego typu czujnika. W obliczeniach maksymalnej częstotliwości prze-
łączeń f
max
zakłada się, że czasy te są sobie równe.
f
max
=
10
3
Czas reakcji
Czas wyzwalania
3
+
f
max
Czas wyzwalania
Czas reakcji
[ms]
-
/
[Hz]
-
71
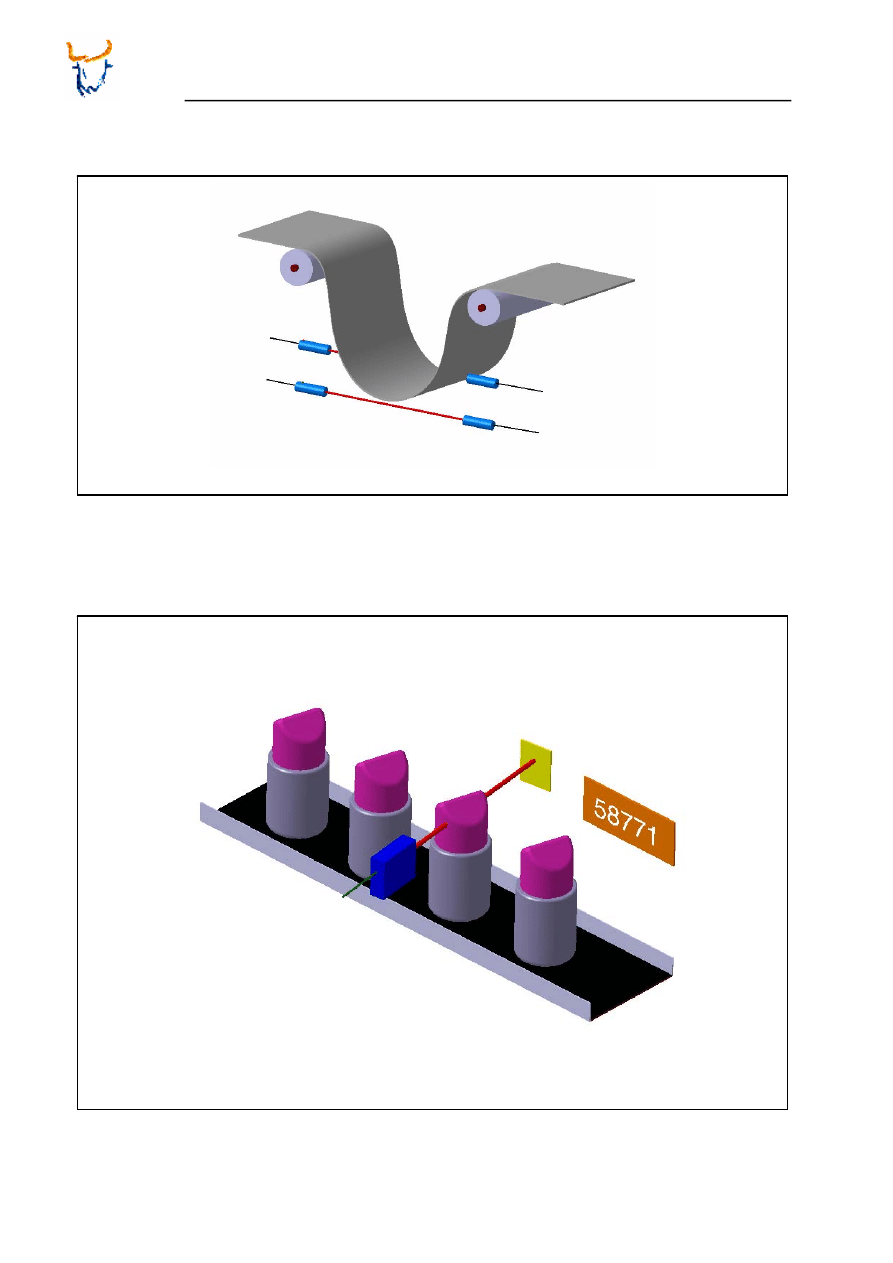
Systemy i funkcje mechatroniczne - Podręcznik
Minos
4.10
Aplikacje
Rys. 4.18:
Fotoelektryczne czujniki przelotowe do kontroli wielkości zwisu taśmy
Rys. 4.19:
Fotooptyczny czujnik refleksyjny do wykrywania niebłyszczących elementów
72
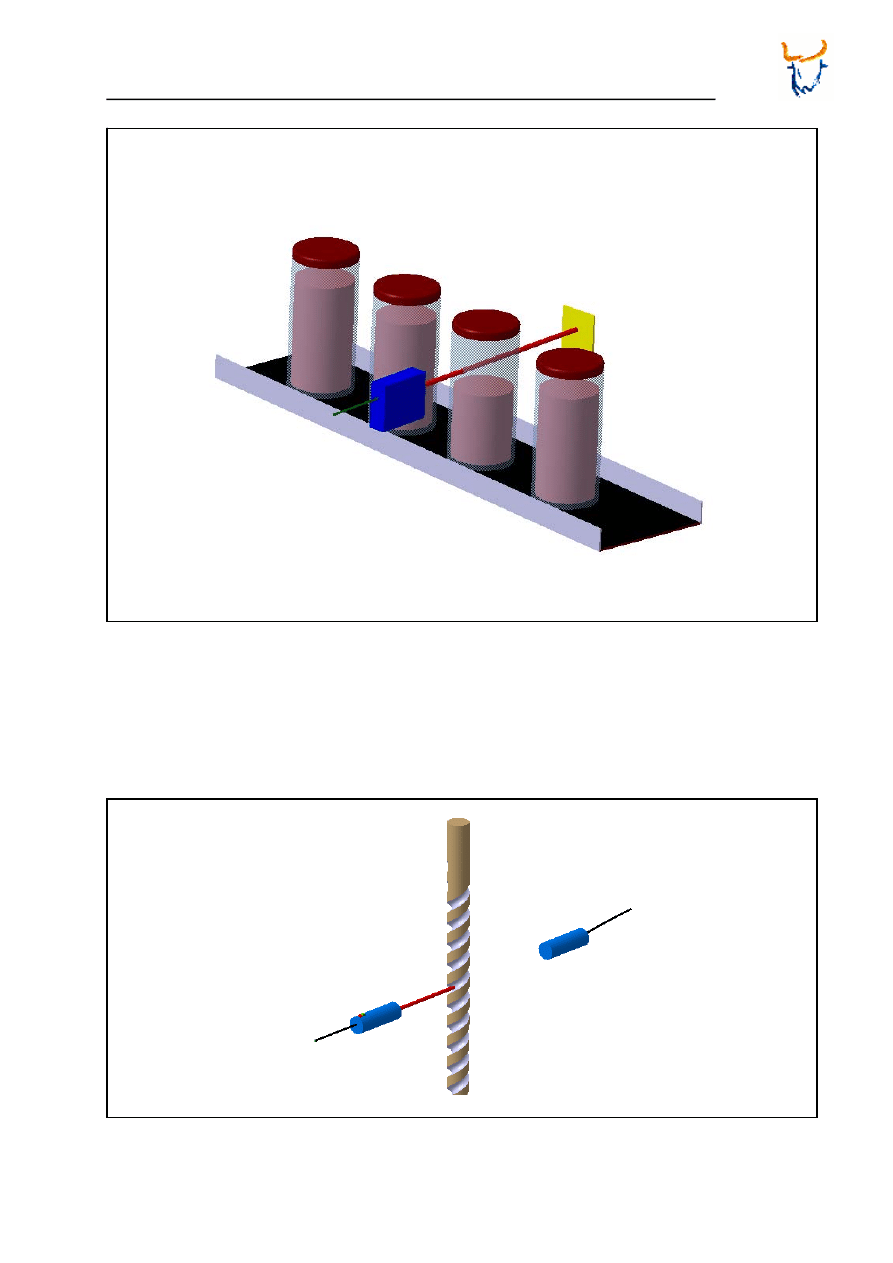
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Rys. 4.20:
Fotooptyczny czujnik refleksyjny z filtrem polaryzacyjnym do wykrywania poziomu
substancji w naczyniu
Rys. 4.21:
Światłowodowy czujnik przelotowy do wykrywania złamania narzędzi
73
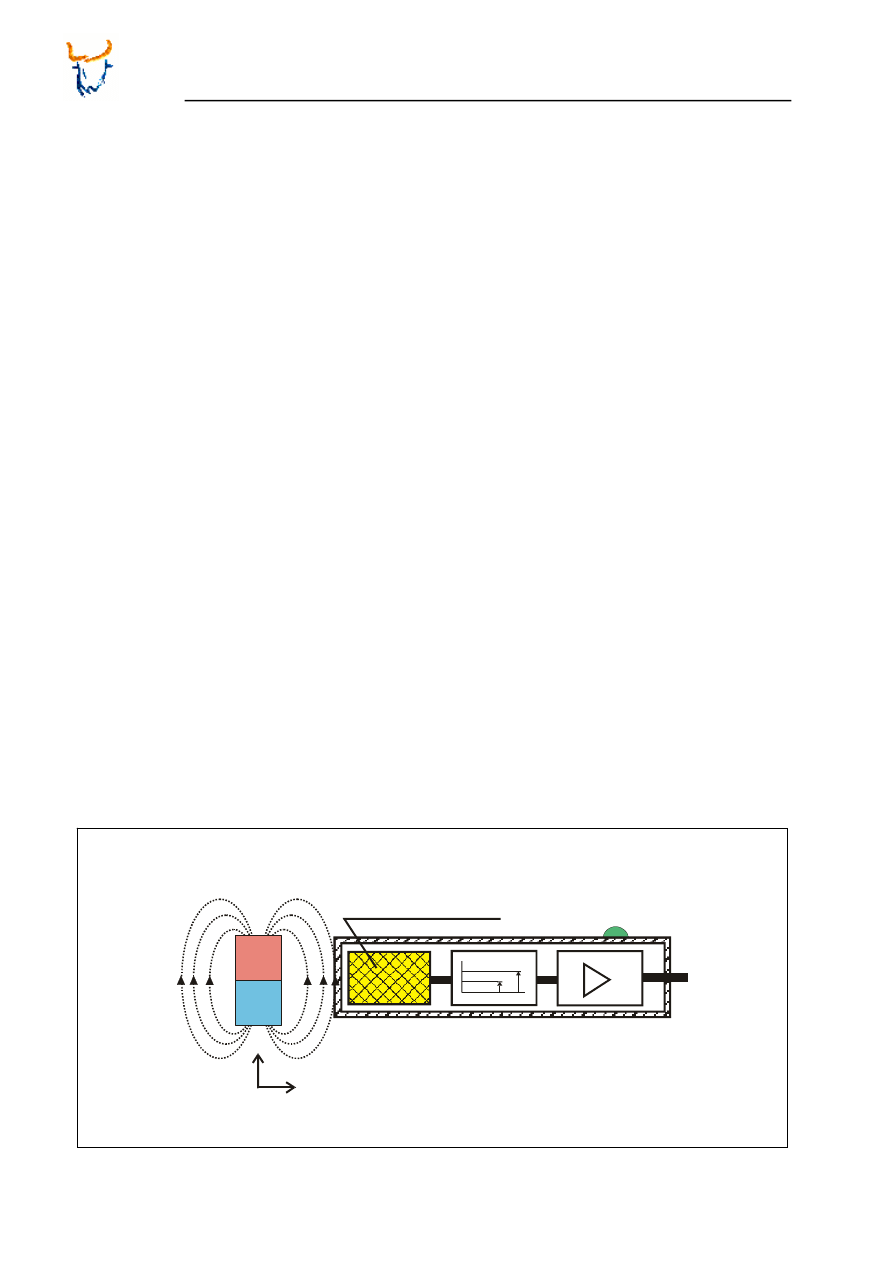
Systemy i funkcje mechatroniczne - Podręcznik
Minos
5
Czujniki magnetyczne
5.1
Informacje podstawowe
Czujniki magnetyczne mogą być stosowane do wykrywania głównie
przedmiotów, w których można zamocować magnesy. Są one typo-
wymi elementami automatyki przemysłowej, często stosowanymi z
uwagi na hermetyczną budowę, zróżnicowane kształty obudowy oraz
duże odległości działania przy niewielkich wymiarach.
Podstawowe odmiany tych czujników nie wymagają zasilania i mogą
być podłączane bezpośrednio do wejść sterowników, jak też mogą
samodzielnie sterować pracą urządzeń. Dodatkową ich zaletą jest sze-
roki zakres napięć i prądów przełączania, nawet ponad 1000V i kilku
A.
Reagują one na pole magnetyczne wytwarzane zwykle przez magnesy
stałe, połączone z wykrywanym przedmiotem. Mogą to być przedmioty
wykonane z różnorodnych materiałów, ale przedmioty nieferromagne-
tyczne są korzystniejsze gdyż zapewniają większy zakres działania
czujnika.
Elementem reagującym na pole magnetyczne może być np. herme-
tyczny łącznik elektryczny (kontaktron), element półprzewodnikowy
(hallotron), magnetorezystor lub też materiał o specjalnych własno-
ściach magnetycznych.
Pola magnetyczne przenikają przez większość materiałów niemagne-
tycznych stąd wykrywanie przedmiotów może odbywać się nawet wte-
dy, gdy między przedmiotem a czujnikiem znajdują się diamagnetycz-
ne przeszkody np. plastikowe ścianki rur lub pojemników.
Zadziałanie czujnika magnetycznego zbliżeniowego (może być sygna-
lizowane diodą świecącą) następuje pod wpływem magnesu zbliżane-
go do czujnika w kierunku X lub Y (rys. 5.1).
Element reagujący
na pole magnetyczne
UKŁAD
DETEKCJI
UKŁAD
WYJŚCIOWY
S
N
X
Y
Magnes
74
Rys. 5.1:
Elementy zbliżeniowego czujnika magnetycznego
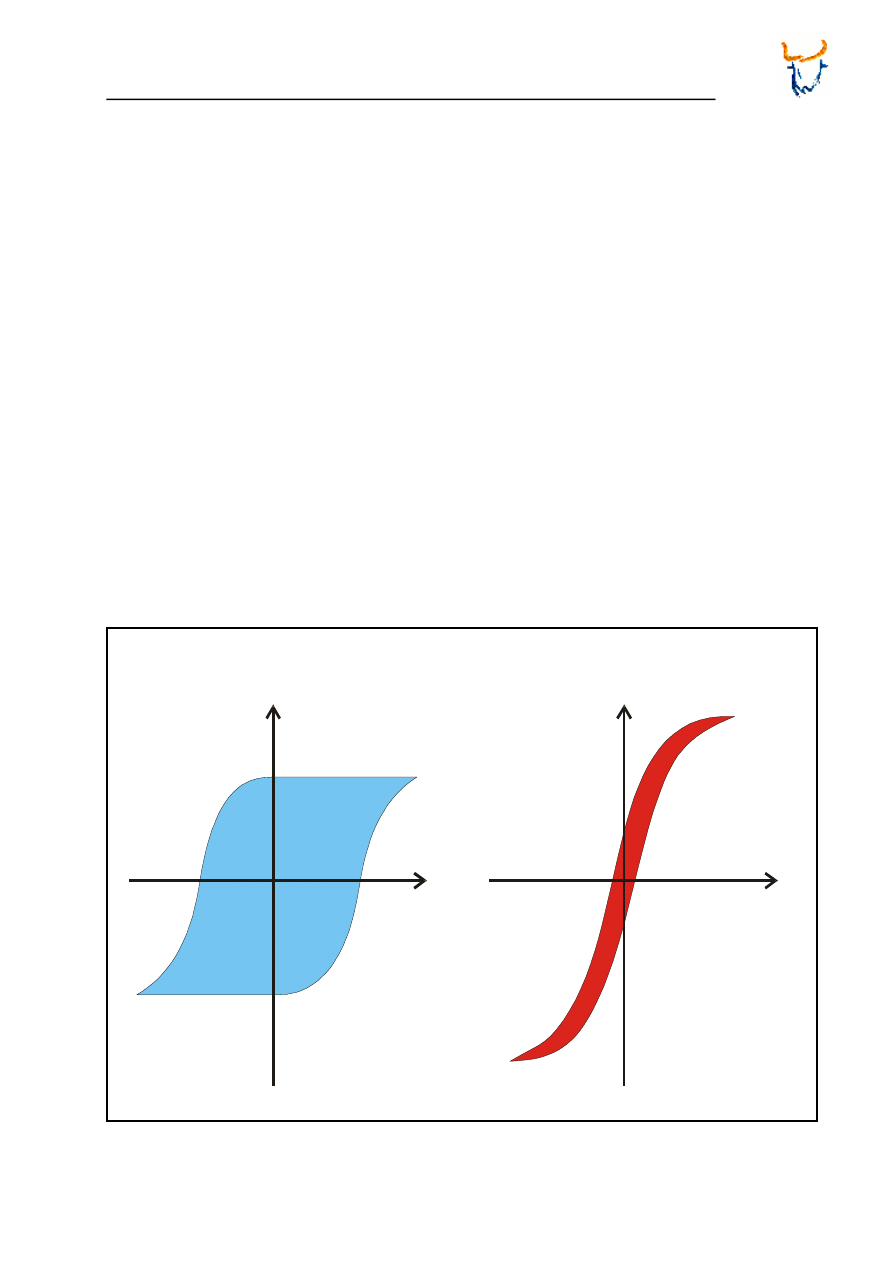
Systemy i funkcje mechatroniczne - Podręcznik
Minos
5.2
Histereza
Ferromagnetyki umieszczone w zewnętrznym polu magnetycznym ule-
gają namagnesowaniu lub rozmagnesowaniu w zależności od kierunku
pola magnetycznego. Towarzyszy temu zjawisko histerezy, kształt któ-
rej zależy od własności ferromagnetyka (rys. 5.2). Szeroka histereza
oznacza, że ferromagnetyk trudno się rozmagnesowuje. Są to tzw. fer-
romagnetyki twarde i mogą być stosowane na magnesy stałe. Należą
do nich: stopy Fe-Co, Ni-Co i ferryty twarde. Ferromagnetyki miękkie
(wąska histereza) mogą być stosowane na rdzenie magnetyczne, któ-
re powinny się szybko magnesować i szybko rozmagnesowywać. Na-
leżą do nich: żelazo, stopy Fe-Si, Fe-Al, ferryty miękkie i stopy amor-
ficzne.
Omówione własności magnetyczne materiałów oraz ich zachowanie
się w zewnętrznym polu magnetycznym pozwalają na budowę różnych
odmian czujników magnetycznych.
W próżni pole magnetyczne charakteryzuje wektor indukcji magne-
tycznej B
o
. Indukcję magnetyczną B w dowolnym materiale o struktu-
rze jednorodnej wyznacza się z zależności:
B =
µ
r
⋅• B
o
a)
b)
Zewnętrzne
pole
magnetyczne
Wytworzone
pole
magnetyczne
Zewnętrzne
pole
magnetyczne
Wytworzone
pole
magnetyczne
Rys. 5.2:
Pętla histerezy magnetycznej ferromagnetyków: a) twardego, b) miękkiego
75
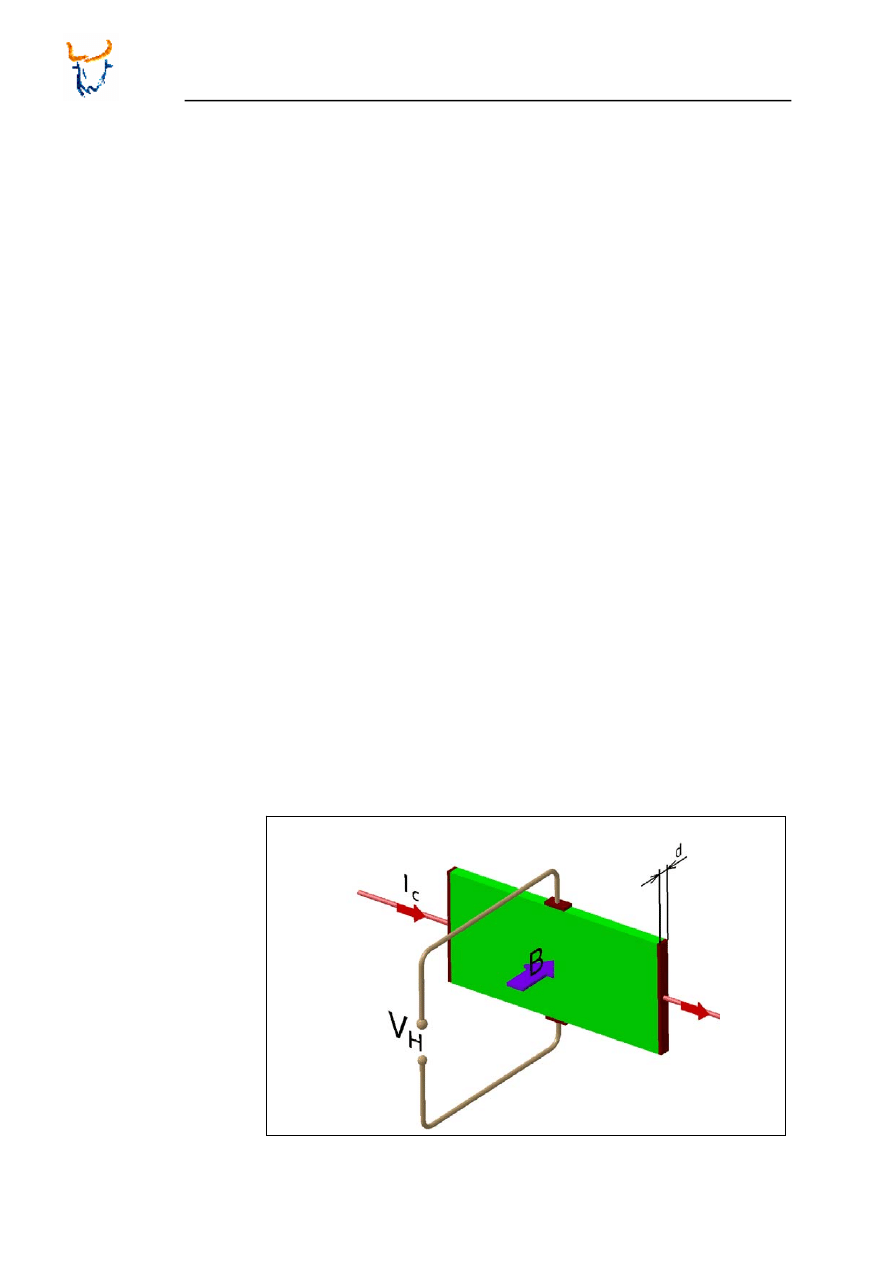
Systemy i funkcje mechatroniczne - Podręcznik
Minos
5.3
Efekt Halla
Efekt Halla polega na pojawianiu się dodatkowego pola elektrycznego
w płytce z przewodnika lub półprzewodnika umieszczonej w zewnętrz-
nym polu magnetycznym, przez którą płynie prąd stały. To pole jest
wynikiem gromadzenia się ładunków elektrycznych tylko na jednym
brzegu płytki pod wpływem zewnętrznego pola magnetycznego. Po-
woduje to różnicę potencjałów na obu jej brzegach, tzw. napięcie Halla
V
H
. Wytworzone dodatkowe pole elektryczne jest prostopadłe zarówno
do kierunku pola magnetycznego B, jak i kierunku przepływu prądu Ic,
przy czym jest ono najsilniejsze, gdy zewnętrzne pole magnetyczne
jest prostopadłe do kierunku przepływu prądu (rys. 5.3).
Dla przedstawionej płytki, między mierzonym napięciem V
H
a płyną-
cym przez płytkę prądem I
C
oraz polem B, jest następujący związek:
V
H
= R
H
⋅B⋅I
c
/d
Gdzie: R
H
– stała Halla (określająca ruchliwość nośników energii), d –
grubość płytki.
Dla praktycznych zastosowań tego zjawiska niezbędne jest uzyskanie
możliwie dużej wartości napięcia V
H
. Można to osiągnąć stosując bar-
dzo cienkie płytki z materiału charakteryzującego się dużą ruchliwością
elektronów. Takie właściwości mają wyłącznie materiały półprzewodni-
kowe, wykonywane technologią cienkowarstwową, pozwalającą na
uzyskanie małej grubości płytki (rzędu 0,1mm). Są to najczęściej pół-
przewodniki typu InSb, InGaAs, Si, GaAs. Możliwość zwiększania na-
pięcia V
H
poprzez zwiększanie prądu przepływającego przez płytkę jest
znacznie ograniczona dopuszczalną mocą wydzielaną na płytce. War-
tość tej mocy zależy w dużym stopniu od konstrukcji i kształtu płytki
półprzewodnika.
Efekt Halla znalazł szerokie zastosowanie praktyczne m.in. w budowie
półprzewodnikowych czujników magnetycznych.
Rys. 5.3:
Efekt Halla
76
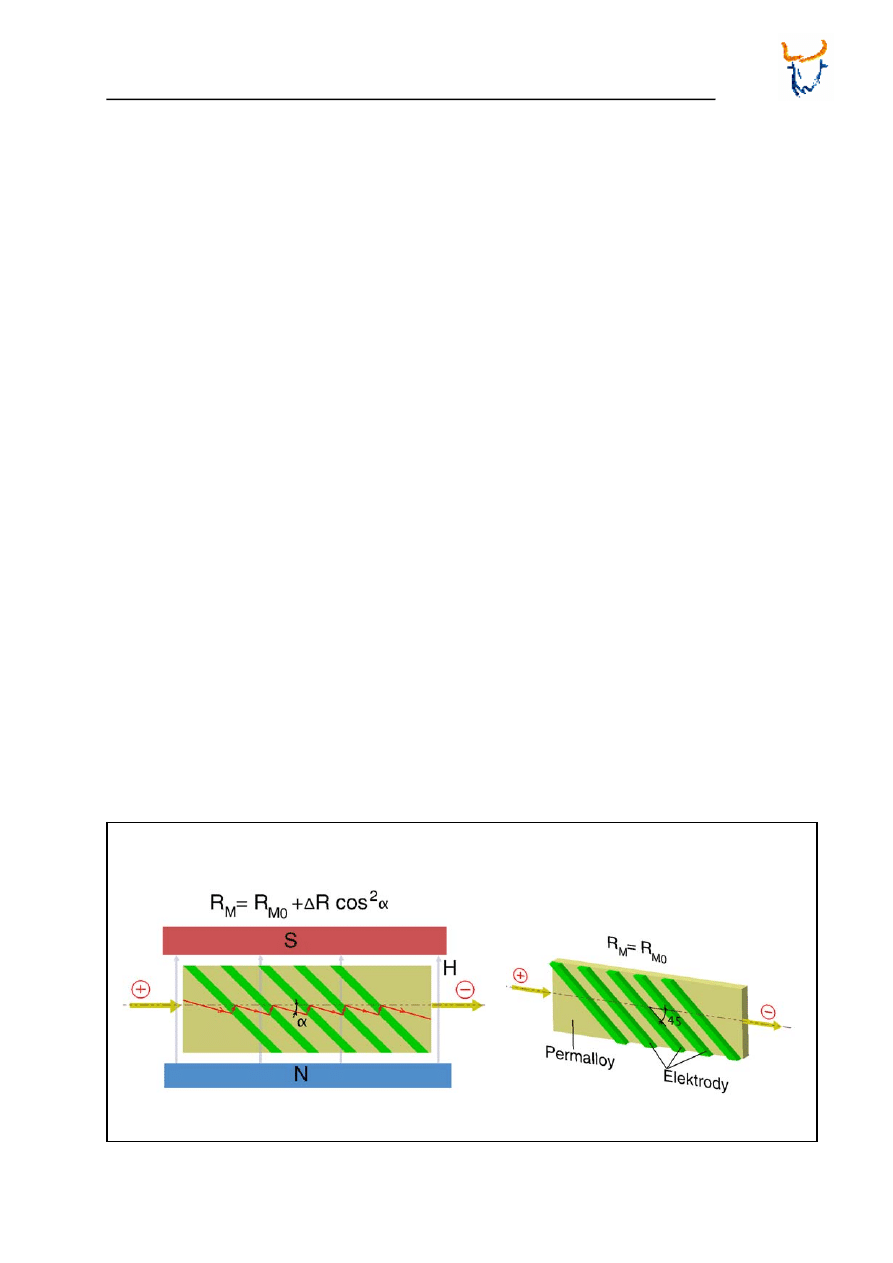
Systemy i funkcje mechatroniczne - Podręcznik
Minos
5.4
Efekt magnetorezystancyjny
Magnetorezystory AMR są to anizotropowe elementy półprzewodni-
kowe, charakteryzujące się silną zależnością rezystancji od natężenia
pola magnetycznego. Na czujniki stosuje się cienkie taśmy z ferroma-
gnetycznego materiału „permalloy” (20% Fe, 80% Ni).
Wzrost magnetorezystancji materiału półprzewodnikowego wynika z
oddziaływania zewnętrznego pola magnetycznego H, które powoduje
w półprzewodniku zmianę kierunku przepływu prądu I o kąt
α
(rys.
5.4). Wydłuża to drogę ładunkom elektrycznym, co jest równoznaczne
ze wzrostem rezystancji półprzewodnika. Wartość tego kąta rośnie
wraz ze wzrostem natężenia pola magnetycznego. Zjawisko to nazy-
wane jest efektem magnetorezystancyjnym.
W różnym stopniu efekt ten oddziałuje na odmienne materiały, i tak w
metalach jest praktycznie niezauważalny a w półprzewodnikach jest
obecny, ale zróżnicowany.
Złote lub aluminiowe elektrody ustawione na drodze przepływu prądu
korygują jego kierunek i w rezultacie droga ładunków elektrycznych
jest jeszcze dłuższa, powodując dalszy wzrost rezystancji półprzewod-
nika do wartości R
M
zależnej od kąta
α
. Po odłączeniu pola magne-
tycznego rezystancja półprzewodnika powraca do początkowej warto-
ści R
M0
.
Związek pomiędzy kątem
α,
wynikającym z natężeniem pola magne-
tycznego H, a rezystancją półprzewodnika R
M
pozwala w czujnikach
magnetycznych na wykrywanie przedmiotów magnetycznych.
Rys. 5.4:
Efekt magnetorezystancyjny
77
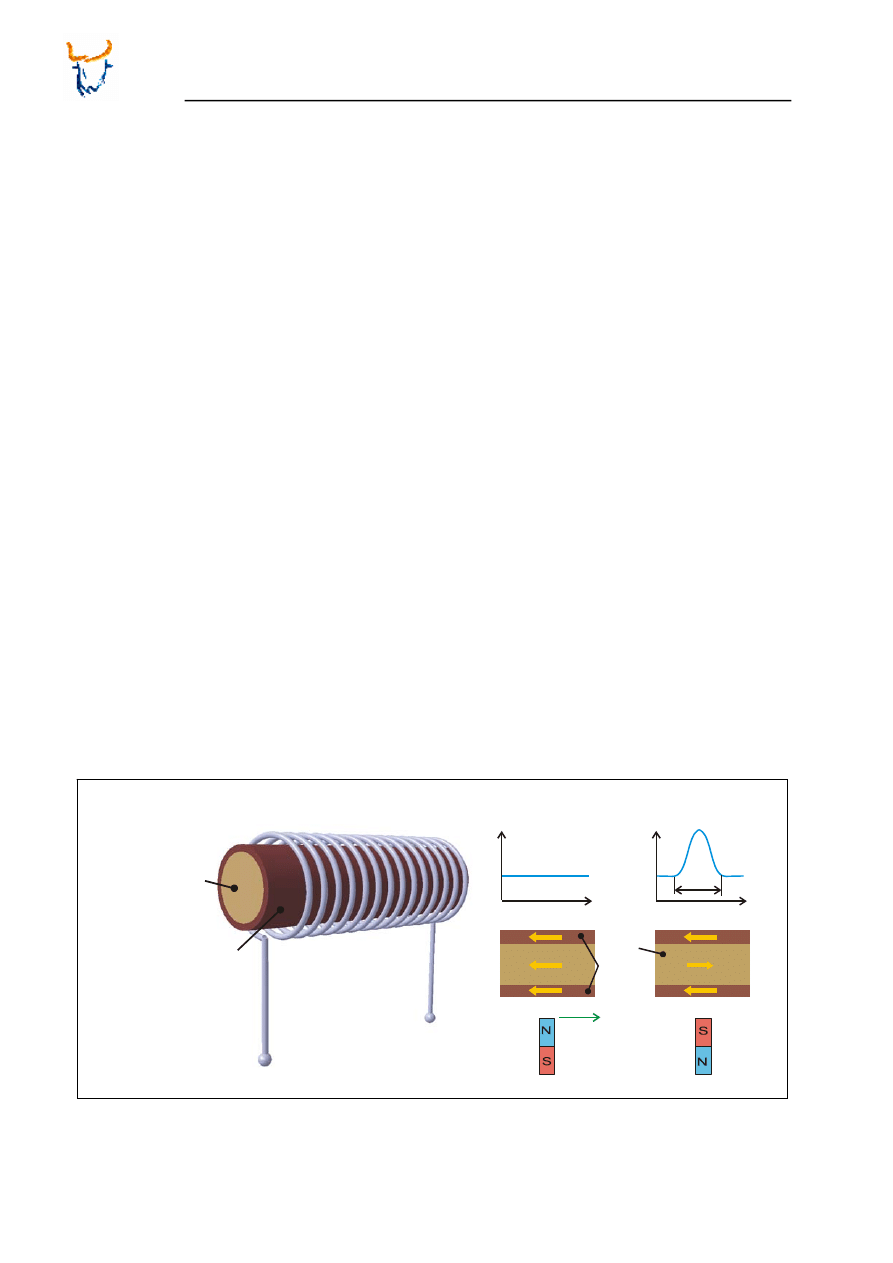
Systemy i funkcje mechatroniczne - Podręcznik
Minos
5.5
Efekt Wieganda
Efekt Wieganda polega na generowaniu elektrycznego impulsu w zwo-
jach cewki nawiniętej na przewodzie ferromagnetycznym o unikalnych
właściwościach magnetycznych („przewód impulsowy”), w wyniku
zmiany kierunku zewnętrznego pola magnetycznego. „Przewody im-
pulsowe” wykonywane są o średnicy około 0,3mm z materiału ferro-
magnetycznego, który jest na zimno wielokrotnie skręcany, aby wywo-
łać w nim odpowiedni stan odkształceń.
Przewód ten, będący związkiem kobaltu, żelaza i wanadu, posiada
dwa odmienne magnetycznie obszary: rdzeń i powłokę. Rdzeń ma
własności materiału magnetycznie miękkiego (wąska histereza) a po-
włoka własności materiału magnetycznie twardego (szeroka histereza)
(rys. 5.5).
Dwie odmienne magnetycznie warstwy reagują różnie na zmianę kie-
runku zewnętrznego pola magnetycznego. Miękki magnetycznie rdzeń
zmieni szybciej kierunek swojego namagnesowania, od twardej ma-
gnetycznie powłoki, Kiedy zewnętrzne pole magnetyczne wymusi taką
właśnie zmianę w rdzeniu, przy niezmienionym jeszcze kierunku ma-
gnetyzacji powłoki, to w cewce nawiniętej na przewodzie impulsowym,
pojawi się krótkotrwały (10 - 20
µs) impuls elektryczny. Amplituda im-
pulsu napięciowego jest prawie niezależna od szybkości zmiany kie-
runku pola magnetycznego. Dla odwrócenia kierunku magnetyzacji
rdzeń wymaga przeciętnie trzy razy słabszego pola magnetycznego
niż powłoka.
To zjawisko znane jako efekt Wieganda jest wykorzystywane w czuj-
nikach magnetycznych do wykrywania obiektów w ruchu obrotowym
lub postępowym.
a)
b)
U
Powłoka
magnetycznie
twarda
Rdzeń
magnetycznie
miękki
Uzwojenia
U
czas
0
U
czas
0
20
µs
Powłoka
Rdzeń
Rys. 5.5:
Efekt Wieganda: a) ”Przewód impulsowy” z cewką, b) impuls napięciowy przed i
po zmianie kierunku zewnętrznego pola magnetycznego (biegunów magnesu)
78
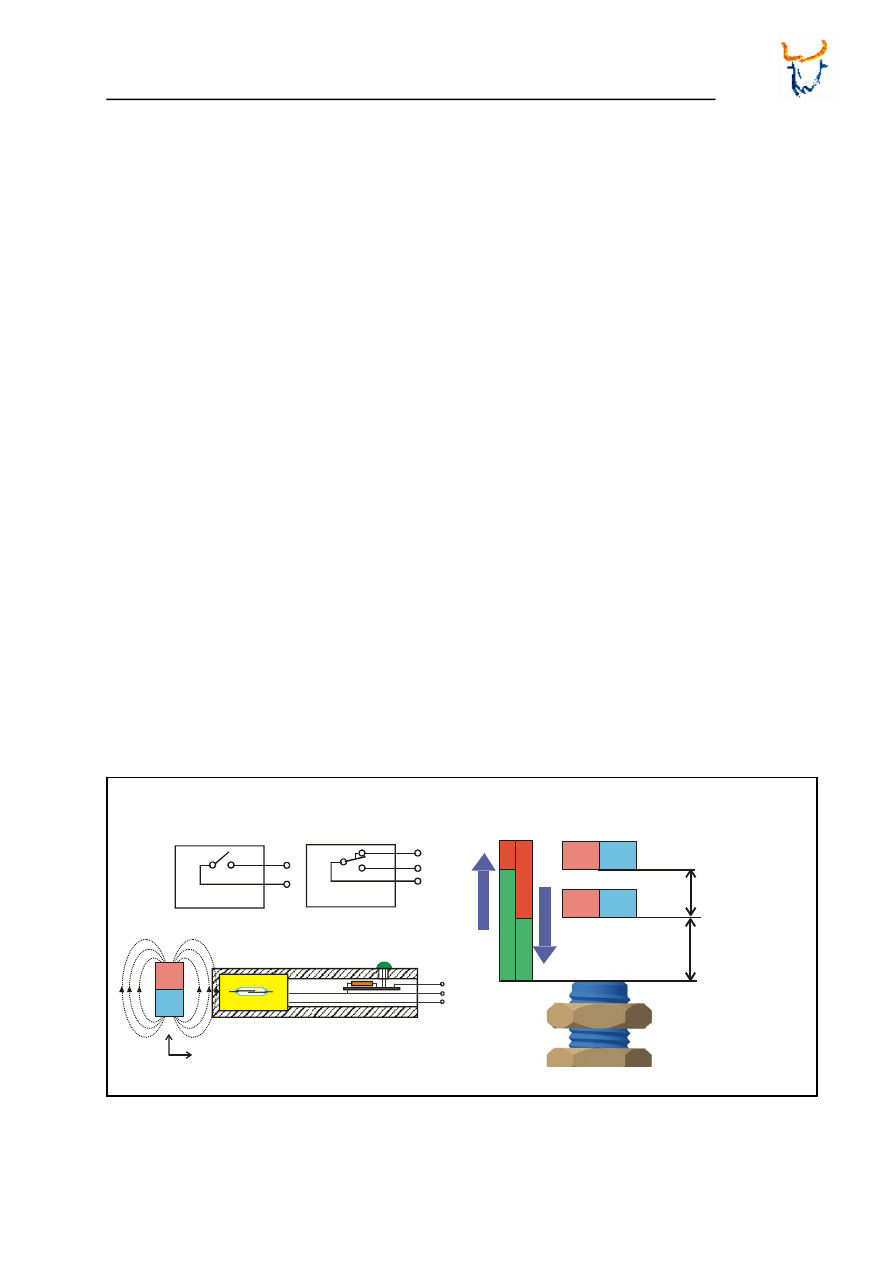
Systemy i funkcje mechatroniczne - Podręcznik
Minos
5.6
Czujniki magnetyczne z kontaktronem
Zasada działania tego czujnika opiera się na pracy kontaktronu, który
reaguje na zbliżanie się do niego magnesu. W polu magnetycznym
wytworzonym przez magnes zestyki kontaktronu zostają namagneso-
wane. Jeśli siła wzajemnego przyciągania zestyków pokona ich siły
sprężystości, kontaktron zmieni swój stan z otwartego na zamknięty.
Dzięki temu zamknięty zostanie również cały obwód elektryczny z do-
łączonym obciążeniem (rys. 5.6).
Usunięcie pola magnetycznego ze strefy działania czujnika spowoduje
zanik siły przyciągającej styki kontaktronu, co w wyniku własnej sprę-
żystości zestyków spowoduje ich rozdzielenie, przerywając tym sa-
mym obwód elektryczny z obciążeniem.
Czujniki z kontaktronem nie wymagają zasilania. Styki kontaktronu,
gdy nie znajdują się w polu magnetycznym, mogą w zależności od ty-
pu kontaktronu pozostawać w stanie otwartym (normalnie otwarte –
NO) lub w jednym z dwóch możliwych stanów NO lub NC (NC - nor-
malnie zamknięty).
Każdy magnes jest źródłem pola magnetycznego, którego natężenie
zależy od jego własności materiałowych i wymiarów. Decyduje ono
bezpośrednio o maksymalnym zasięgu S
max
czujnika z kontaktronem.
Czujniki z kontaktronem mogą być trójprzewodowe, a w przypadku
braku diody, sygnalizującej stan czujnika, maja tylko dwa przewody.
Maksymalna częstotliwość przełączeń stanu wyjścia jest niewielka
(<250Hz), a prąd jaki może przepływać przez kontaktron nie przekra-
cza 3A. Przy małych wartościach prądu czujniki te mogą skutecznie
przełączać urządzenia pracujące z napięciem, nawet powyżej 100V.
a) b)
WYJŚCIE
S
N
X
Y
Magnes
Kontaktron
S
N
S
N
S
max
H
ON
OF
F
ON
OF
F
NO
NO/NC
Rys. 5.6:
Czujnik magnetyczny z kontaktronem: a) schemat czujnika i stanu wyjścia, b) za-
kres działania: S
max
– maksymalny zasięg czujnika, H – histereza
79
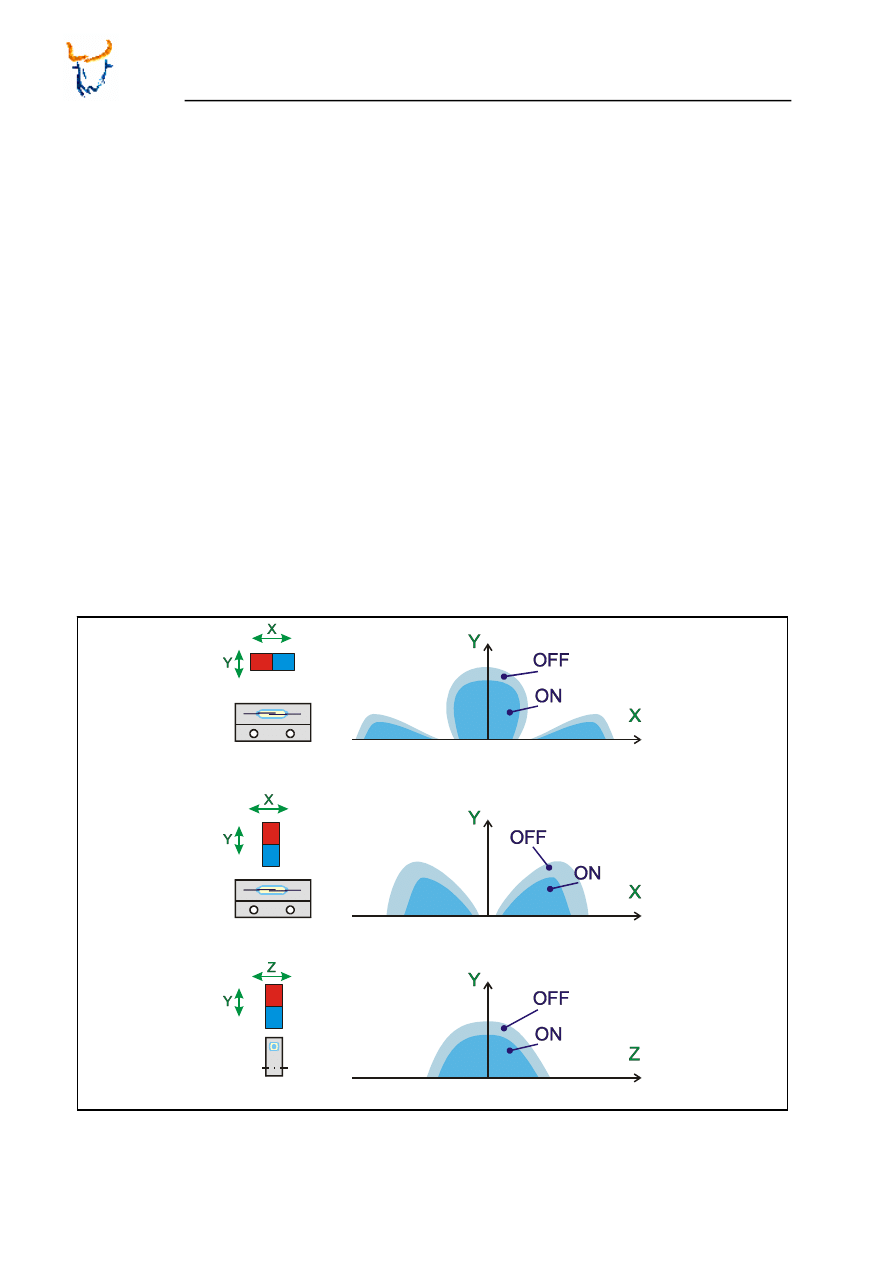
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Siła oddziaływania pola magnetycznego zależy od odległości magnesu
od czoła czujnika w kierunku wzdłużnym i poprzecznym (rys. 5.7).
Zgodnie z charakterystyką działania kontaktronu, przy przemieszcza-
niu magnesu w kierunku X, zorientowanego równolegle do osi kontak-
tronu, muszą wystąpić trzy strefy, w których stan wyjścia czujnika bę-
dzie załączony (ON). Ustawiając odpowiednio magnes i czujnik wzglę-
dem siebie można uzyskać też czujnik o dwóch lub jednej strefie prze-
łączania. W każdym przypadku zbliżając lub oddalając w kierunku Y
magnes od czujnika będzie występowało tylko jedno przełączenie z
ON na OFF lub z OFF na ON.
Magnetyczne czujniki kontaktronowe posiadają bardzo różne kształty
obudów, od prostych cylindrycznych i prostopadłościennych, do bar-
dzo złożonych form geometrycznych. Decyduje o tym ich przeznacze-
nie. Kształt czujnika wymusza obszary, w których może poruszać się
magnes. Są czujniki, w których możliwe jest tylko przemieszczanie
magnesu względem czoła czujnika i są takie, które umożliwiają prze-
mieszczanie magnesu również względem bocznych powierzchni czuj-
nika.
S
N
S
N
S
N
Rys. 5.7:
Strefy zadziałania magnetycznego czujnika kontaktronowego w zależności od po-
łożenia magnesu i jego orientacji
80
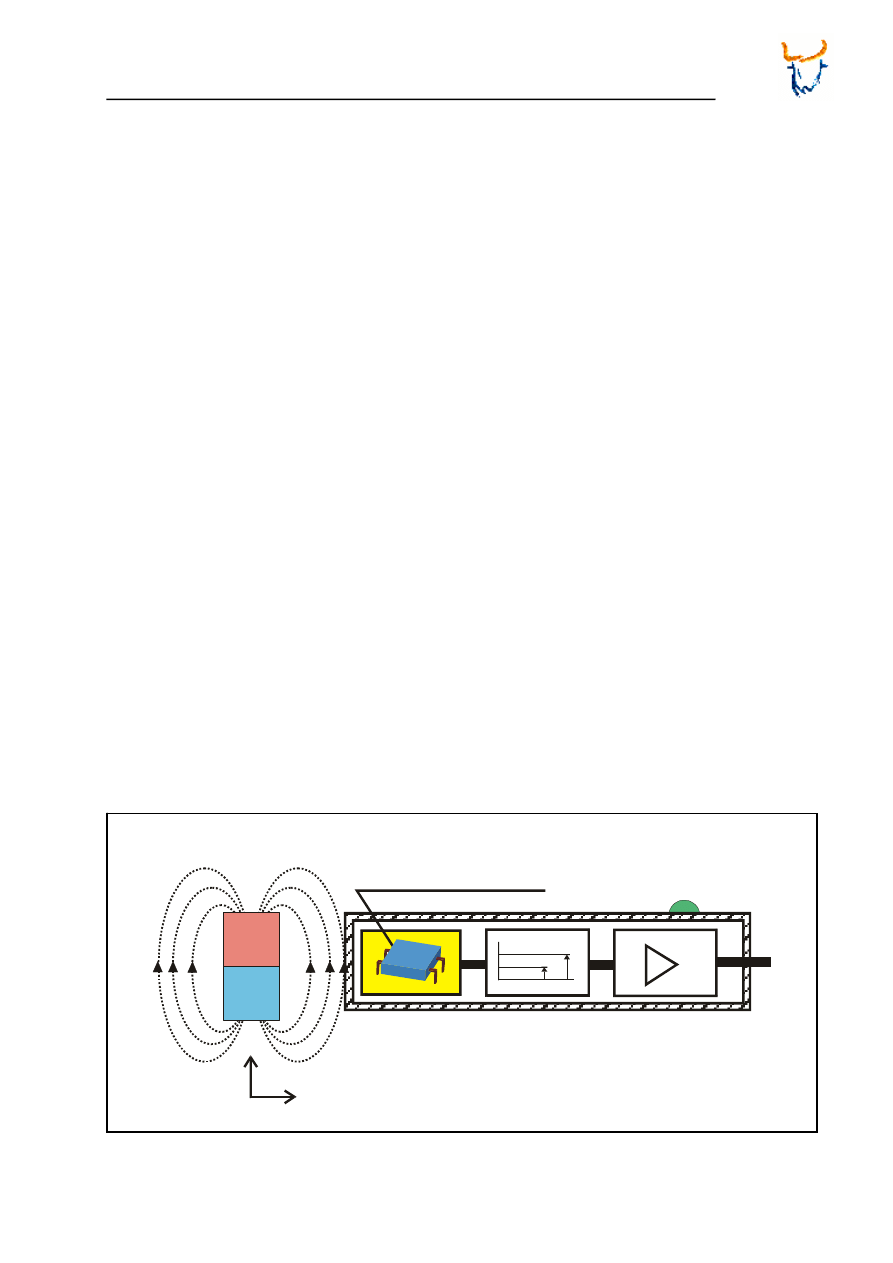
Systemy i funkcje mechatroniczne - Podręcznik
Minos
5.7
Czujniki magnetyczne z hallotronem
Czujniki magnetyczne hallotronowe wykorzystują występujący w pół-
przewodnikach efekt Halla. Stan ich wyjścia zmienia się pod wpływem
zmian zewnętrznego pola magnetycznego, powodującego pojawianie
się w czujniku dodatkowego napięcia Halla U
H
.
Czujnik jest zasilany prądem stałym, który płynie przez płytkę półprze-
wodnikową (hallotron). Dopóki magnes znajduje się poza strefą dzia-
łania czujnika prąd bez przeszkód przepływa przez hallotron. Różnica
potencjału na jego krawędziach jest wówczas równa zero (V=0). Kiedy
magnes pojawi się w strefie działania czujnika, jego pole magnetyczne
spowoduje pojawienie się na krawędziach hallotronu napięcia Halla
(V=V
H
). To napięcie stanowi sygnał pomiarowy, który steruje tranzysto-
rem wyjściowym czujnika (rys. 5.8).
Czujniki te wykonywane są zwykle jako trójprzewodowe, zasilane na-
pięciem stałym 5V do 30V. Maksymalna częstotliwość przełączania
stanu wyjścia jest dla tych czujników duża – nawet ponad 300 kHz.
Maksymalny prąd przepływający przez hallotron jest zwykle poniżej
1A.
Czujniki wykonywane mogą być w wersji omnipolarnej (reagują na do-
wolną polaryzację pola magnetycznego), unipolarnej (reagują tylko na
określoną polaryzację pola magnetycznego) oraz bipolarnej (wyłącze-
nie następuje przeciwnym biegunem pola magnetycznego niż włącze-
nie).
Półprzewodnikowy
układ Halla
UKŁAD
DETEKCJI
UKŁAD
WYJŚCIOWY
S
N
X
Y
Magnes
Rys. 5.8:
Czujnik magnetyczny z hallotronem
81
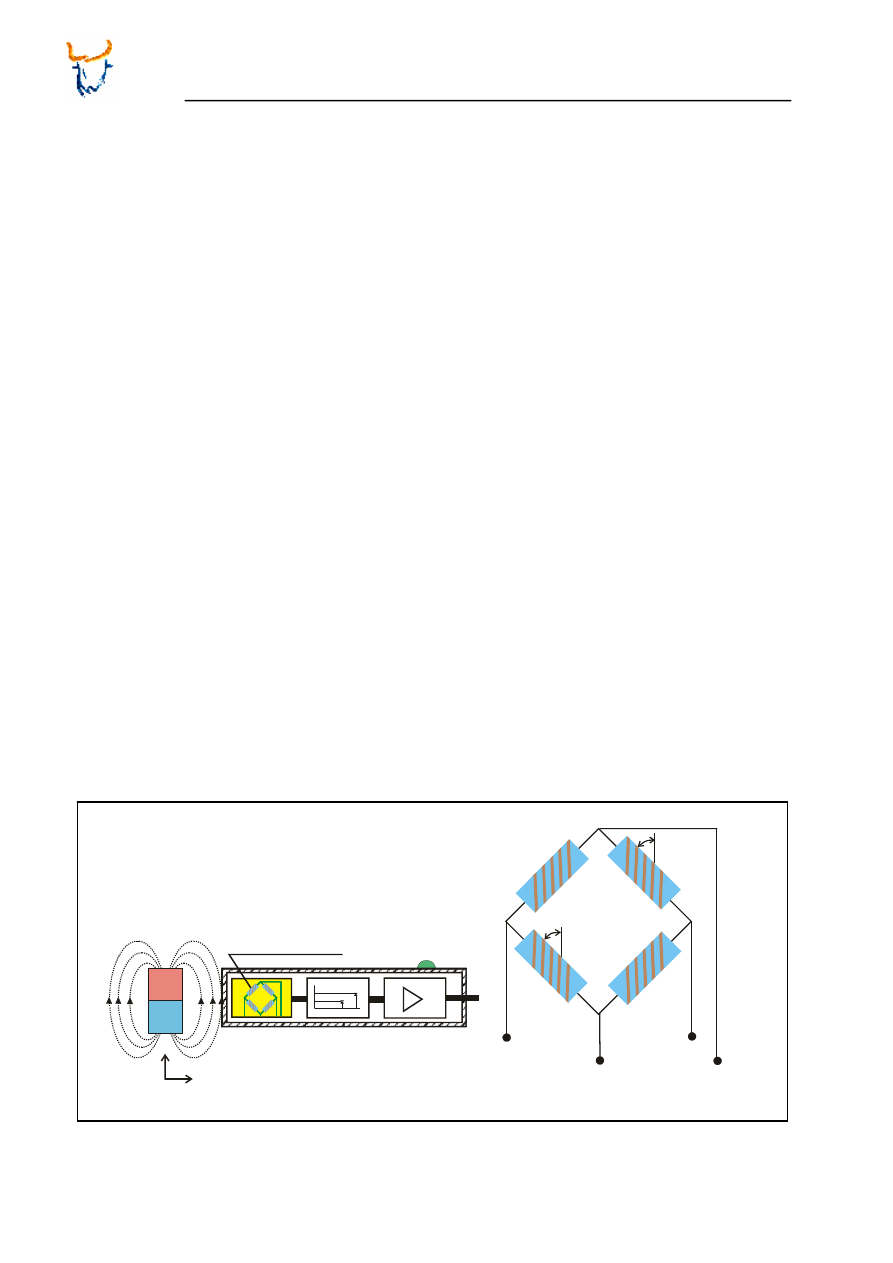
Systemy i funkcje mechatroniczne - Podręcznik
Minos
5.8
Czujniki magnetyczne specjalne
5.8.1
Czujniki magnetorezystancyjne
Struktura czyjnika magnetorezystancyjnego jest podobna do struktury
czujników hallotronowych. Różnią się one one jedynie rodzajem ele-
mentu wrażliwego na zmiany pola magnetycznego.
W czujnikach magnetorezystancyjnych tym elementem z reguły są
cztery magnetorezystory R
M
1 – R
M
4, połączone w układ mostka Whe-
atstone’a (rys. 5.9). Muszą być przy tym zachowane właściwe kierunki
pochylenia elektrod. W tak zestawionym mostku pomiarowym będzie
realizowana kompensacja cieplnych zmian temperaturowych a sygnał
wyjściowy ulegnie podwojeniu w stosunku do pomiarów jednym ma-
gnetorezystorem.
W wyniku zbliżania magnesu do czujnika następuje, zgodnie z efektem
magnetorezystancji, zmiana rezystancji czujnika i rozrównoważenie
mostka pomiarowego. Rozrównoważenie to jest liniową funkcją zmiany
natężenia pola magnetycznego.
a)
b)
M
ostek
Wheatstone'a
UKŁAD
DETEKCJI
UKŁAD
WYJŚCIOWY
S
N
X
Y
Magnes
45
o
45
o
R 1
M
R 2
M
R 4
M
R 3
M
GND
Zasilanie
Sygnał
pomiarowy (+)
Sygnał
pomiarowy (-)
Rys. 5.9:
Czujnik magnetorezystancyjny: a)schemat, b) mostek Wheatstone’a z magnetore-
zystorami
82
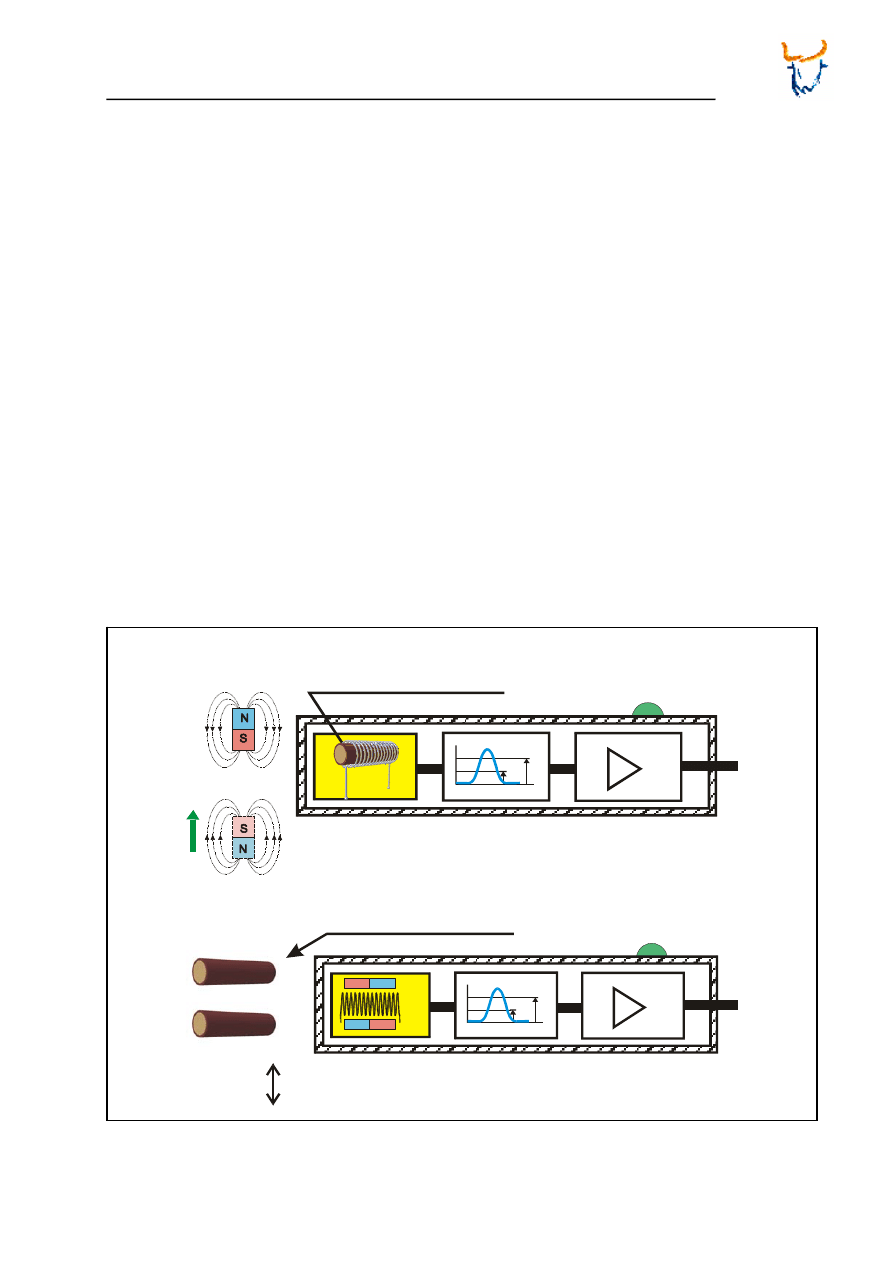
Systemy i funkcje mechatroniczne - Podręcznik
Minos
5.8.2 Czujniki magnetyczne Wieganda
Zasada pracy czujnika magnetycznego Wieganda sprowadza się do
rejestrowania przypadków zmiany kierunku namagnesowania (polary-
zacji) rdzenia „przewodu impulsowego”. Polaryzacja namagnesowania
rdzenia może zmienić się na odwrotną, jeśli zewnętrzne pole magne-
tyczne zmieni swój kierunek.
Zmieniające kierunek zewnętrzne pole magnetyczne może być wytwa-
rzane przez ruchome lub nieruchome małe magnesy (rys. 5.10). W
pierwszym przypadku na „przewód impulsowy” działa pole magnetycz-
ne magnesu o polaryzacji np. N/S, a następnie pole kolejnego magne-
su o odwróconej polaryzacji S/N. Ta zmiana polaryzacji zewnętrznego
pola magnetycznego powoduje impuls napięciowy w cewce nawiniętej
wokół przewodu impulsowego, który może być bezpośrednio lub po
przetworzeniu sygnałem wyjściowym z czujnika.
W drugim przypadku zmiana kierunku namagnesowania rdzenia uzy-
skiwana jest w wyniku przesuwania przewodu impulsowego, najpierw
przed magnesem o polaryzacji np. N/S, a po chwili przed drugim ma-
gnesem o odwrotnej polaryzacji S/N. W tej koncepcji magnesy oraz
cewka umieszczone są w czujniku, a elementem poruszającym się
względem czujnika jest przewód impulsowy.
a)
Układ
Wieganda
UKŁAD
DETEKCJI
UKŁAD
WYJŚCIOWY
b)
Przewody impulsowe
UKŁAD
DETEKCJI
UKŁAD
WYJŚCIOWY
Y
S
S
N
N
Rys. 5.10:
Tryby pracy czujnika magnetycznego Wieganda a) ruchome pole magnetyczne, b)
ruchomy „przewód impulsowy”
83

Systemy i funkcje mechatroniczne - Podręcznik
Minos
84
Oprócz omówionych trybów pracy możliwe jest jeszcze rozwiązanie ze
stacjonarnymi magnesami umieszczonymi w głowicy czujnika wraz z
cewką nawiniętą na przewodzie impulsowym. W tym przypadku zmia-
nę kierunku pola magnetycznego może wywoływać ferromagnetyk po-
ruszający się przed czołem czujnika. Rozwiązanie to może posłużyć
do zliczania przedmiotów ferromagnetycznych przesuwających się
przed czujnikiem. Można to wykorzystać np. do pomiaru prędkości ob-
rotowej koła zębatego, rejestrując liczbę zębów przesuwających się
przed czujnikiem. W takim przypadku odwrócenie strumienia magne-
tycznego w przewodzie impulsowym zdarza się dwa razy częściej niż
częstotliwość przechodzenia zębów koła zębatego nad biegunami ma-
gnetycznymi czujnika. Każdemu odwróceniu strumienia towarzyszy
duży impuls napięcia w cewce.
Czujniki Wieganda nie wymagają zasilania, mogą być wykonywane ja-
ko proste czujniki dwuprzewodowe i są odpowiednie do pracy w trud-
nych warunkach środowiskowych. Charakteryzuje je wysoka częstotli-
wość generowanych impulsów (nawet do 20 kHz) oraz wysoki i powta-
rzalny impuls napięcia wyjściowego (kilka woltów).
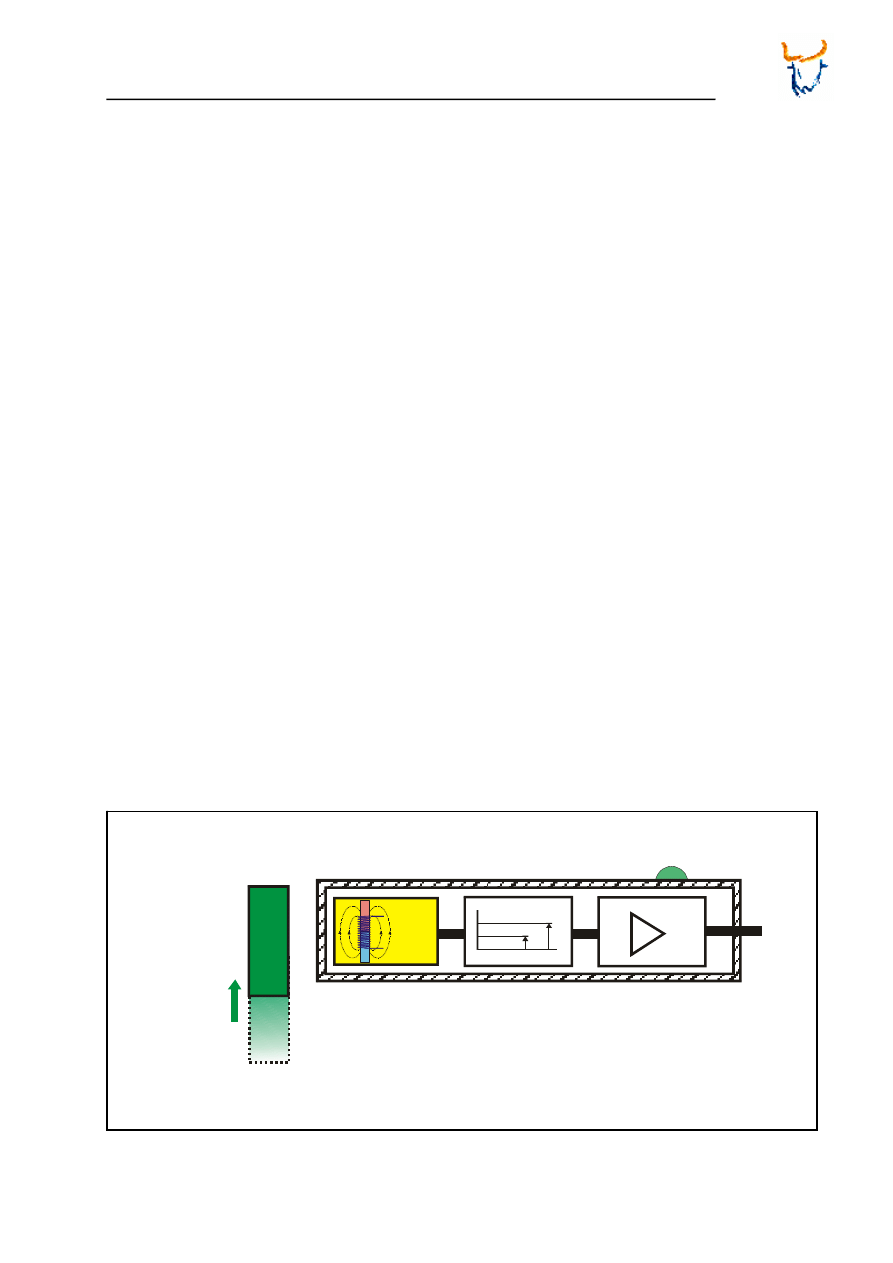
Systemy i funkcje mechatroniczne - Podręcznik
Minos
5.8.3
Czujniki magnetyczne z magnesem
Najprostsze magnetyczne czujniki składają się z magnesu stałego i
nawiniętej dookoła niego cewki (rys. 5.11). Ferromagnetyczny przed-
miot zbliżający się do czujnika zmienia strumień magnetyczny prze-
chodzący przez cewkę, generując równocześnie napięcie na końcach
cewki. Tego typu czujniki magnetyczne wykrywają ruch przedmiotu fer-
romagnetycznego.
Nie mogą one jednak być stosowane do wykrywania nieruchomych
przedmiotów, ponieważ napięcie wyjściowe zależy od tego jak szybko
wykrywany przedmiot zbliża się do czujnika. Wartości tych napięć są
jednak małe i wymagają dodatkowego wzmocnienia, aby przełączyć
stan układu wyjściowego. Gdy prędkość przedmiotu zmniejsza się, to
napięcie wyjściowe też spada. Dla nieruchomego przedmiotu spada
ono do zera.
Czujniki te nie wymagają zasilania oraz cechują się wysoką rozdziel-
czością, znacznie wyższą niż przy wykorzystaniu efektu Halla. Roz-
dzielczość tą osiąga nawet setne części stopnia przy pomiarze pręd-
kości obrotowej.
UKŁAD
DETEKCJI
UKŁAD
WYJŚCIOWY
Ferromgnetyk
N
S
Rys. 5.11:
Czujnik magnetyczny do wykrywania przedmiotów ferromagnetycznych w ruchu
85
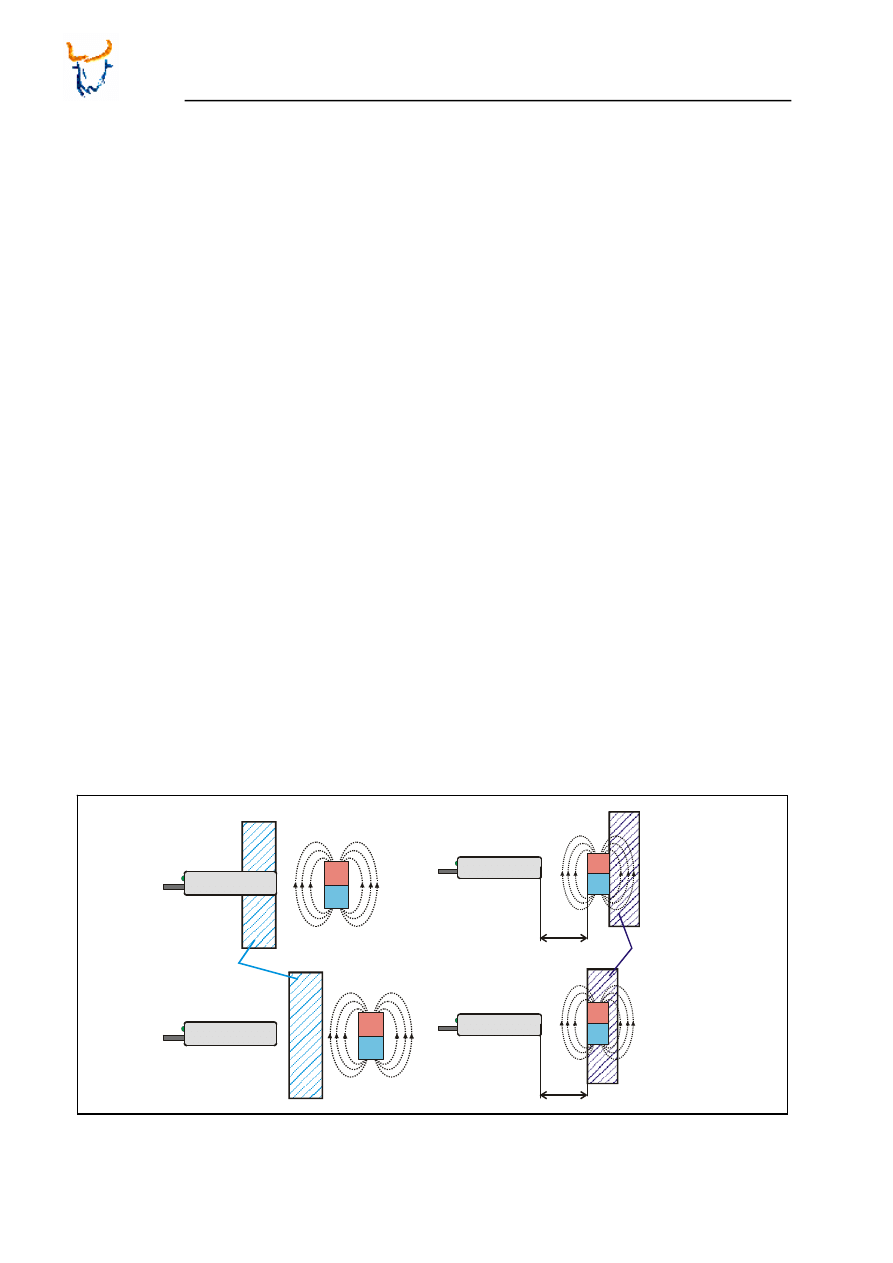
Systemy i funkcje mechatroniczne - Podręcznik
Minos
5.9
Warunki zabudowy
Czujniki magnetyczne mogą być mocowane lub osadzane w elemen-
tach wykonanych z dowolnego materiału nieferromagnetycznego. Bez
znaczenia dla czułości czujnika jest wówczas wielkość jego wysunięcia
ponad powierzchnię, w której jest on osadzony. Czoło czujnika może
być nawet zrównane z tą powierzchnią (rys. 5.12).
Jeśli czujnik musi być osadzony w materiale ferromagnetycznym, to
korzystne jest możliwie duże jego wysunięcie ponad powierzchnię ma-
teriału ferromagnetycznego. Wskazane jest też wprowadzenie dodat-
kowej warstwy izolacyjnej z materiału niemagnetycznego (dielektryka),
oddzielającej czujnik i ferromagnetyk.
Mocując magnes do powierzchni ferromagnetycznych należy liczyć się
z wystąpieniem efektu osłabienia pola magnetycznego magnesu lub
jego wzmocnienia. Wzmocnienie pola wystąpi wtedy, gdy magnes mo-
cowany jest na zewnętrznej powierzchni elementu ferromagnetyczne-
go a osłabienie, gdy jest on wpuszczony w głąb materiału ferromagne-
tycznego. W takim samym stopniu jak wzmocnienie zmieni się zakres
pracy czujnika.
Wprowadzenie między czujnik a magnes przedmiotu wykonanego z
materiału nieferromagnetycznego nie wpływa na zachowanie się czuj-
nika magnetycznego. Inaczej zachowa się czujnik, gdy między ma-
gnesem a czujnikiem pojawi się przedmiot ferromagnetyczny. Może to
w większości sytuacji doprowadzić do zmiany stanu wyjścia czujnika,
czyli do zakłócenia jego pracy.
CZUJNIK
Materiał
nieferromagnetyczny
CZUJNIK
S
N
S
N
CZUJNIK
1,2 x Sn
Materiał
ferromagnetyczny
CZUJNIK
0,6 x Sn
S
N
S
N
Rys. 5.12:
Oddziaływanie elementów wykonanych z materiałów ferromagnetycznych i niefer-
romagnetycznych na własności czujnika magnetycznego
86
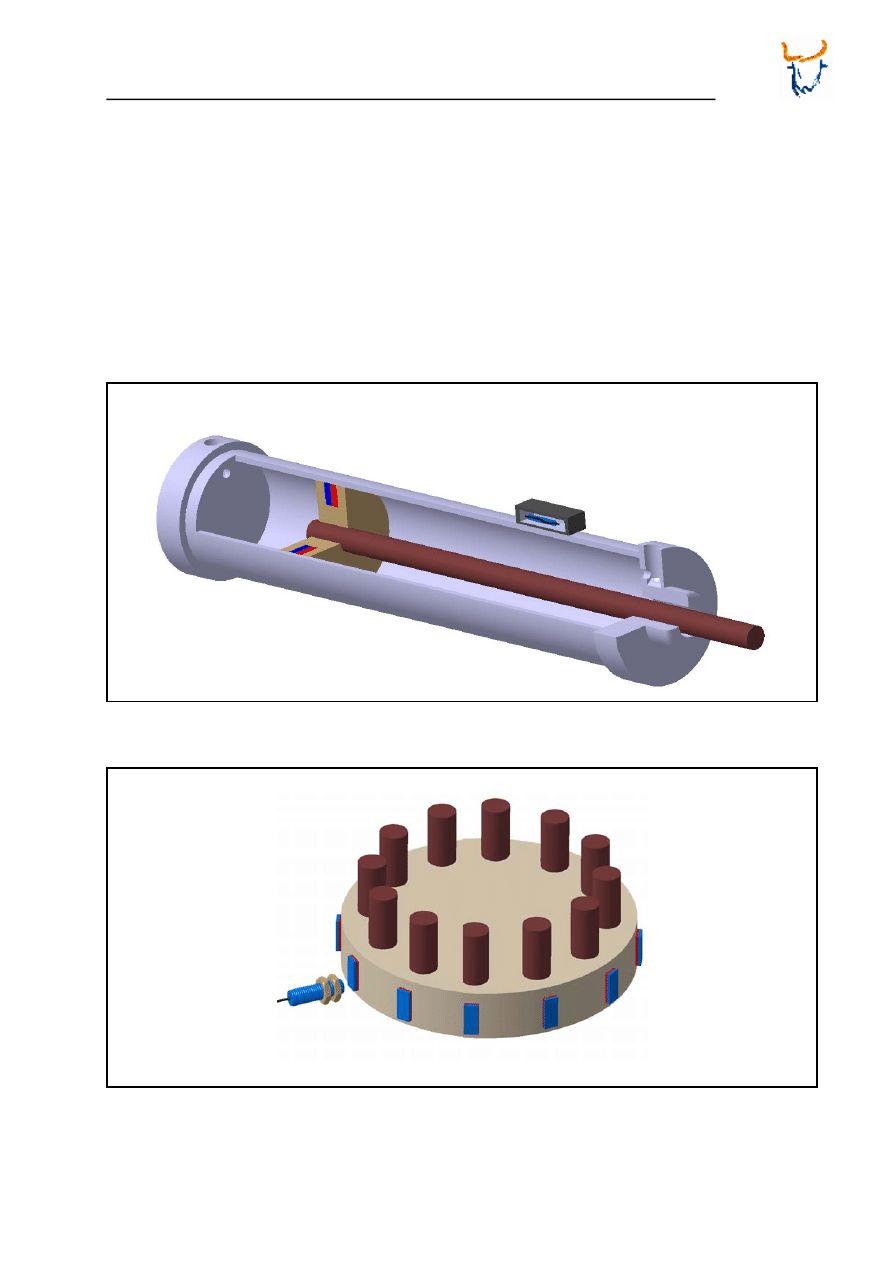
Systemy i funkcje mechatroniczne - Podręcznik
Minos
5.10
Aplikacje
Czujniki magnetyczne znajdują zastosowanie między innymi do:
- wykrywania obiektów znajdujących się za ściankami plastikowymi np.
wewnątrz rur lub pojemników,
- wykrywanie obiektów w agresywnych środowiskach poprzez ścianki
ochronne,
- wykrywania obiektów w obszarach o podwyższonej temperaturze,
dzięki możliwości wyprowadzania pola magnetycznego z pomocą
elementów ferromagnetycznych,
- wykrywania obiektów w ruchu postępowym lub obrotowym,
Rys. 5.13:
Wykrywanie położenia tłoka poprzez niemagnetyczny korpus cylindra z użyciem
magnetycznego czujnika kontaktronowego
Rys. 5.14: Wykrywanie pozycji kątowej stołu magnetycznym za pomocą magnetycznego czujni-
ka Halla
87

Systemy i funkcje mechatroniczne - Podręcznik
Minos
88
6
Funkcje czujników w systemach mechatronicznych
6.1
Podstawowe zastosowania sensorów w systemach mechatronicznych
Podstawowe zadania sensorów we współczesnych systemach mecha-
tronicznych wiążą się z zapewnieniem prawidłowego, zgodnego z za-
łożeniami konstruktorów, działania struktur tych systemów i z realiza-
cją ich funkcji sterowania procesami roboczymi. Sensory służą do
identyfikacji:
- zachowania się systemów w warunkach ich pracy, poprzez pomiary
wartości parametrów określających ich własności eksploatacyjne,
- prawidłowości sterowania parametrami realizowanych procesów, po-
przez śledzenie wartości tych parametrów w sposób ciągły lub okre-
sowy i ich nadzorowanie,
- zakłóceń eksploatacyjnych, poprzez diagnostykę,
- degradacji własności eksploatacyjnych i występujących uszkodzeń,
poprzez diagnostykę serwisową.
6.2
Złożoność struktur systemów mechatronicznych i umiejscowienie w nich sen-
sorów
Współczesne systemy mechatroniczne są to urządzenia lub maszyny
o budowie hybrydowej, integrujące w swojej strukturze moduły mecha-
niczne, hydrauliczne, pneumatyczne, elektryczne, elektroniczne.
Wszystkie te moduły mogą być proste lub złożone i ich działanie musi
spełniać wymagania określone przez konstruktorów. Wymagania te są
podstawą prawidłowego realizowania zadań roboczych i funkcji każ-
dego systemu mechatronicznego. Wymagania dotyczą parametrów
pracy węzłów konstrukcyjnych modułu/systemu, takich na przykład jak:
- Znamionowe prędkości i przyspieszenia realizowanych ruchów ze-
społów roboczych, które ocenia się za pomocą odpowiednich senso-
rów rozmieszczonych wewnątrz struktury systemów.
- Położenia, pozycjonowanie i orientacje zespołów oraz przedmiotów,
rozpoznawane za pomocą odpowiednich sensorów dotykowych i bez-
dotykowych.
- Drogi (długości) realizowanych ruchów – oceniane za pomocą senso-
rów drogi, od bardzo prostych do bardzo złożonych, zależnie od wy-
maganej precyzji sterowania drogą.
- Znamionowe prędkości ruchów elementów pomocniczych mierzone
sensorami prędkości, wtedy gdy wartości tych prędkości podlegają ste-
rowaniu.
- Przenoszone i wywierane (znamionowe) obciążenia (siła, ciśnienie,
prąd, moc elektryczna, moment), które muszą być kontrolowane przez
odpowiednie sensory i nadzorowane.
- Dopuszczalne warunki termiczne pracy systemu, poszczególnych je-
go modułów i ich elementów, identyfikowane poprzez pomiary tempe-
ratury sensorami rozmieszczonymi wewnątrz tych modułów.
- Zintegrowane zdolności ruchowe – identyfikowane przez zintegrowa-
ne sensory: drogi, prędkości i przyspieszenia.
- Własności energetyczne systemów i ich modułów – ich moc, mo-
ment, mierzone przez sensory w sposób bezpośredni lub pośredni.

Systemy i funkcje mechatroniczne - Podręcznik
Minos
89
Wymienione działania systemów odbywają się na podstawie informacji
pozyskiwanych z sensorów. Sensory te oprócz funkcji dotyczących
samych pomiarów muszą na ogół spełniać dodatkowe wymagania do-
tyczące np.: wielkości, kształtu, lokalizacji, dopuszczalnych zakłóceń
przetwarzania i przekazywania mierzonych sygnałów oraz wymagania
związane z odpowiednimi systemami komunikacyjnymi.
6.3
Złożoność funkcji systemów mechatronicznych i umiejscowienie w nich senso-
rów
Systemy mechatroniczne mają różną złożoność realizowanych zadań,
od bardzo prostych, właściwych dla urządzeń wykonujących pojedyn-
cze funkcje i dla prostych urządzeń realizujących wiele funkcji, po za-
dania realizowane przez urządzenia wykonujące złożone działania.
Realizacja funkcji systemu jest sterowana automatycznie według za-
danych algorytmów, w których przebieg czynności sterowniczych obej-
muje:
- Rozpoznanie stanu wyjściowego do realizacji funkcji - za pomo-
cą odpowiedniego czujnika lub zespołu czujników z wizualizacją lub/i
przekazaniem sygnałów do układu sterowania z udziałem systemu
komunikacji.
- Ocena gotowości włączenia realizacji funkcji.
- Włączenie realizacji funkcji – decyzja i działanie człowieka lub ukła-
du sterowania z udziałem systemu komunikacji.
- Obserwacja prawidłowości przebiegu realizacji funkcji – automa-
tyczna obserwacja przez pojedynczy sensor lub układ sensorów, zin-
tegrowanych z układem przetwarzania sygnałów, układem logicznym,
układem regulacji i programem sterowania, z udziałem systemu komu-
nikacji.
- Decyzja o zakończeniu realizacji funkcji - podejmowana przez
układ sterowania, na podstawie sygnału z czujnika i odpowiedniego
algorytmu programu sterowania, z udziałem systemu komunikacji.
- Wyłączenie realizacji funkcji – może być realizowane przez sensor
lub zespół sensorów, albo przez przetwornik lub zespół przetworników,
zgodnie z algorytmem sterowania.
- Informacja o zakończeniu realizacji funkcji –przekazywana jest
przez układ komunikacji do systemu sterowania, w celu zatrzymania
pracy systemu bądź zainicjowania kolejnego zadania.
Z powyższego algorytmu realizacji pojedynczej funkcji przez system
mechatroniczny wynika, że im bardziej złożona jest ta pojedyncza
funkcja, tym bardziej znaczący jest w niej udział sensorów. W przy-
padku realizacji przez system mechatroniczny pojedynczych złożonych
funkcji i wielu funkcji równocześnie wzajemnie zależnych, złożoność
zadań sensorów może być bardzo duża. Rośnie ona w zależności od
wymaganej: dokładności, czułości, stabilności sygnałów pozyskiwa-
nych za pomocą sensorów. Złożoność zadań sensorów zależy też od
odpowiednich wymagań układu sterowania samych systemów mecha-
tronicznych. Zadania te i wymagania mogą np. zakładać konieczność
integracji sensorów z układami przetwarzania sygnałów i ich wzmoc-
nienia, miniaturyzację takich zespołów pomiarowych i szczególną pre-
cyzję działania.

Systemy i funkcje mechatroniczne - Podręcznik
Minos
90
6.4
Zastosowanie sensorów do diagnozowania systemów mechatronicznych
Jedną z najważniejszych cech maszyn i urządzeń jest poprawność
działania wchodzących w ich skład modułów i systemów mechatro-
nicznych. Poprawność ta musi być sprawdzana zarówno w fazie ich
montażu, poprzez zastosowanie diagnostyki odbiorczej, jak i w warun-
kach eksploatacyjnych, przez zastosowanie diagnostyki ciągłej (online)
lub okresowej (offline). Diagnostyka ta jest niezbędna do nadzorowa-
nia poprawności pracy samych systemów i poprawności realizowanych
procesów roboczych.
Konieczne jest też sprawdzanie degradacji własności użytkowych sys-
temów, postępującej w trakcie eksploatacji, celem planowania i reali-
zacji czynności serwisowych, przywracających systemom ich wyma-
ganą poprawność działania.
Rola sensorów w wymienionych procesach diagnostycznych sprowa-
dza się do dokładnego i niezawodnego mierzenia wartości odpowied-
nich parametrów, określających poprawność działania systemu me-
chatronicznego. W przypadku prostych systemów mechtronicznych
wykonujących pojedyncze funkcje, konieczne są na ogół pomiary: dro-
gi urządzeń wykonawczych, prędkości, wywieranych przez nie sił, ci-
śnień, itp. Pomiary te wykonuje się za pomocą pojedynczych sensorów
lub zespołu sensorów, sprzężonych z przetwornikami i wzmacniacza-
mi. Ich sygnały w przetworzonej postaci są przekazywane do wyświe-
tlaczy bądź/i do układu sterowania procesem diagnostycznym i do
głównego sterownika systemu mechatronicznego, poprzez odpowiedni
układ komunikacyjny.
Im większa jest złożoność systemów mechatronicznych i wymagana
precyzja ich działania, tym większa musi być precyzja mierzenia war-
tości odpowiednich parametrów. Większa też musi być niezawodność
działania sensorów i przetwarzania ich sygnałów. W systemach wy-
twórczych sensory mogą dostarczać informacje o:
- prawidłowości realizowanego cyklu pracy (zadania),
- stanie narzędzi np. skrawających,
- stanie wiórów,
- ciągłości chłodzenia narzędzi i przedmiotu obrabianego,
- stanie warstwy wierzchniej,
- wymiarach, itp.
Sensory mogą wchodzić w skład pojedynczych modułów pomiarowych
lub zintegrowanych z wysoko zorganizowanym skomputeryzowanym
systemem diagnostycznym. Wiele funkcji diagnostycznych jest zinte-
growane z różnego typu sterownikami PLC i CNC.
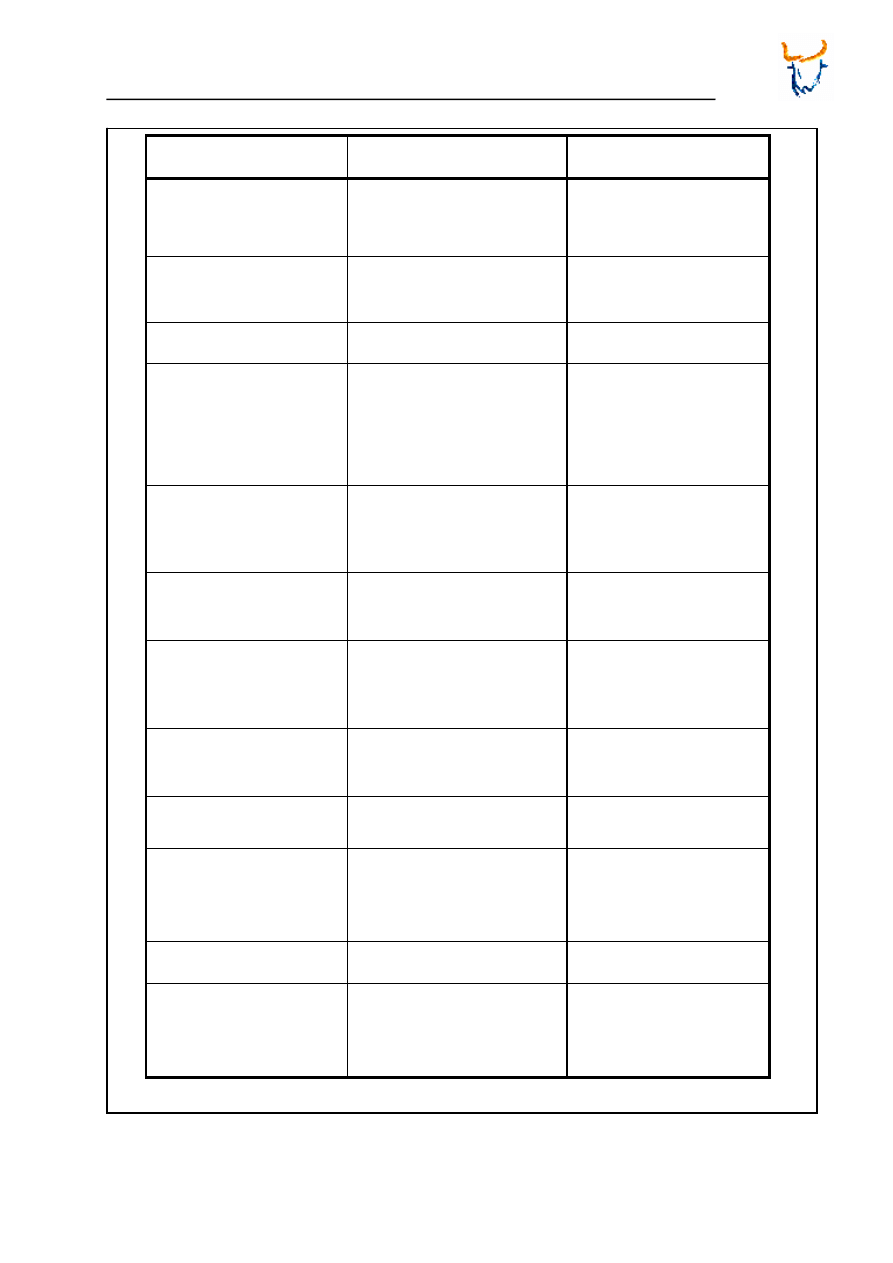
Systemy i funkcje mechatroniczne - Podręcznik
Minos
NIESPRAWNOŚĆ
SYMPTOM
SENSOR
awaria układu smarowania
łożysk
• temperatura łożyska
• obciążenie wewnętrzne w
łożysku
• termoelement, termistor,
tensometr,
• tensometr, czujnik induk-
cyjny
awaria układu chłodzenia
• temperatura obiektu
• zmiany wymiarów i kształtu
przedmiotów obrabianych
• termoelement, termistor
• sonda pomiarowa, czujnik
pneumatyczny, laser
awaria układu hydrauliczne-
go
• ciśnienie
• czujnik ciśnienia
zacieranie łożyska
• temperatura łożyska
• obciążenie wewnętrzne w
łożysku
• moc (prąd) pobierana przez
silnik
• termoelement, termistor,
tensometr
• tensometr, czujnik induk-
cyjny
• przetwornik mocy (prądu),
bocznik
uszkodzenie łożyska
• poziom i widmo drgań
• poziom i widmo hałasu
• chropowatość powierzchni
obrobionej
• czujnik drgań
• mikrofon
• sonda pomiarowa
nadmierny luz w łożyskach
• poziom i widmo drgań
• chropowatość powierzchni
obrobionej
• czujnik drgań
• sonda pomiarowa
uszkodzenie przekładni zę-
batych
• odstęp między impulsami
• drgania
• chropowatość powierzchni
obrobionej
• czujnik indukcyjny
• czujnik drgań
• sonda pomiarowa
niewłaściwe luzy w prowad-
nicach
• moc pobierana przez silnik
• przyspieszenie podczas roz-
ruchu
• przetwornik mocy (prądu),
bocznik
• czujnik drogi, laser
nadmierne luzy w połączeniu
śruba - nakrętka
• drgania
• stan powierzchni obrabianej
• czujnik drgań
• sonda pomiarowa
niedostateczne smarowanie
prowadnic
• moc pobierana przez silnik
• stan powierzchni obrabianej
• przyspieszenie podczas
rozruchu
• przetwornik mocy (prądu),
bocznik
• sonda pomiarowa
• czujnik drogi, laser
niesprawność układu korekcji
lub kompensacji
• stan powierzchni obrabianej
• sonda pomiarowa, czujnik
pneumatyczny
wystąpienie drgań samo-
wzbudnych
• drgania
• stan powierzchni obrabianej
• zmiana amplitudy siły skrawa-
nia
• czujnik drgań
• sonda pomiarowa
• czujnik piezoelektryczny,
tensometry
Tabela 6.1: Typowe niesprawności zespołów obrabiarek oraz symptomy i sensory stosowane
w ich diagnozowaniu
91

Systemy i funkcje mechatroniczne - Podręcznik
Minos
92
6.5
Zastosowanie sensorów w nadzorowaniu systemów mechtronicznych
Nadzorowanie poprawności działania systemów mechatronicznych po-
lega na sprawdzaniu czy założone wartości parametrów pracy syste-
mu mieszczą się w dopuszczalnych granicach. To jest podstawą do
korygowania parametrów przez układ sterowania i odpowiednie urzą-
dzenia mechatroniczne lub do kompensacji zidentyfikowanych błędów
przez układ sterowania (jeśli to możliwe). Sygnały pomiarowe przeka-
zywane przez sensory są odpowiednio przetwarzane i porównywane z
wartościami wymaganymi. Różnica tych wartości jest sygnałem regu-
lacji układu sterowania lub wartością błędu chwilowego, który w odpo-
wiednim trybie jest kompensowany.
Im większa jest wymagana dokładność działania systemu mechatro-
nicznego tym większa musi być precyzja działania sensorów i dokład-
ność pomiaru określonych wartości. Jeśli nadzorowanie oparte jest na
modelu odpowiedniego błędu, to wskazania sensorów służą do ureal-
nienia tego modelu w czasie rzeczywistym lub okresowo.
6.6
Zastosowanie sensorów w diagnostyce serwisowej systemów mechatronicz-
nych
Bardzo ważną odmianą diagnostyki jest diagnostyka serwisowa sys-
temów mechatronicznych prowadzona podczas ich eksploatacji w spo-
sób okresowy lub ciągły. Ocenia się w niej stan zużycia systemu w ce-
lu dokonania okresowych napraw lub korygowania odpowiednich pa-
rametrów pracy. Ocenę tę wykonuje się poprzez pomiary wartości od-
powiednich parametrów, świadczących o zużyciu składników systemu,
za pomocą odpowiednich sensorów. Znajdują się one na stałe w struk-
turze systemów lub wchodzą w skład wyspecjalizowanych systemów
pomiarowych, jedno i wielo sensorowych, przeznaczonych do okreso-
wych pomiarów (w tym pomiarów odbiorczych po dokonaniu napraw).
Niekiedy taka diagnostyka jest przeprowadzana zdalnie (remote) co
będzie przedmiotem osobnego omówienia, lub wprost wewnątrz obiek-
tu mechatronicznego jako samodiagnostyka. Własności pomiarowe
sensorów w tego rodzaju diagnostyce zależą od wymaganej precyzji
działania systemu i sposobu sterowania jego funkcjami eksploatacyj-
nymi.

Systemy i funkcje mechatroniczne - Podręcznik
Minos
93
7
Sieci przemysłowe
7.1
Istota komunikacji między czujnikami a odbiornikami ich sygnałów
Tradycyjna komunikacja pomiędzy nadajnikami sygnałów (czujnikami)
a ich odbiornikami (układami sterowania) odbywa się poprzez przewo-
dy łączące pojedyncze nadajniki z odbiornikami, co wymaga dużej
liczby przewodów prowadzonych często na znaczne odległości. Takie
rozwiązania są skomplikowane technologicznie, kosztowne i technolo-
gicznie trudne do realizacji.
Sieć komunikacyjna polega na przesyłaniu jedną linią wielu, bądź bar-
dzo dużej liczby informacji. Sieci komunikacyjne są najnowocześniej-
szym rozwiązaniem komunikacji między czujnikami a urządzeniami
sterującymi.
Moduł komunikacji sieciowej składa się z układów współpracujących z
sensorami lub układami wykonawczymi z jednej strony i układów
współpracującymi z siecią z drugiej strony.
Koncepcja zastosowania rozwiązań sieciowych polega na zbieraniu
sygnałów przez urządzenia pośrednie, stanowiące węzły sieci i przesy-
łaniu ich przy użyciu tzw. magistrali do jednostki nadrzędnej (odbiorni-
ka) (rys.7.1).
Magistrala to zespół linii oraz układów przełączających służących do
przesyłania sygnałów między połączonymi urządzeniami. Magistrala
pozwala na:
- znacznie obniżyć koszty przesyłu informacji,
- zwiększyć odległość między czujnikiem i sterownikiem,
- przesyłać dane dotyczące kalibracji i charakterystyki czujnika.
Największą popularnością cieszą się sieci otwarte, czyli takie, które
pozwalają na wymianę informacji między urządzeniami różnych do-
stawców (producentów) w sposób ściśle określony przez odpowiednie
standardowe procedury, według standaryzowanych zasad. Najczęściej
wykorzystywane są standardy przemysłowe (protokoły komunikacji),
takie jak: Ethernet, Profibus, DeviceNet, Modbus, CAN, AS-I, MAP.
Dzięki sieciom powstają rozproszone systemy sterowania, pozwalają-
ce przenieść część procesu przetwarzania sygnałów na niższe pozio-
my systemu, czyli bliżej procesu.
Podstawowymi urządzeniami sieciowymi są moduły wejść/wyjść (I/O)
wyposażone w interfejsy - połączenie do określonych typów sieci i
urządzeń, pomiędzy którymi sygnały są przekazywane. Moduł taki jest
widziany przez jednostkę nadrzędną pod jednym adresem sieciowym i
może pozwalać na transmisję danych. Jest to szczególnie istotne na
najniższym poziomie sieci - na poziomie urządzeń i czujników, gdzie
często realizowane jest złożone przetwarzanie sygnałów, a czasy po-
dejmowania decyzji muszą być krótkie, aby reakcja układu sterowania
mogła być natychmiastowa. Rys.7.1 przedstawia przykład zastosowa-
nia tego typu sieci Profibus w zastępstwie tradycyjnego okablowania
centralowego.
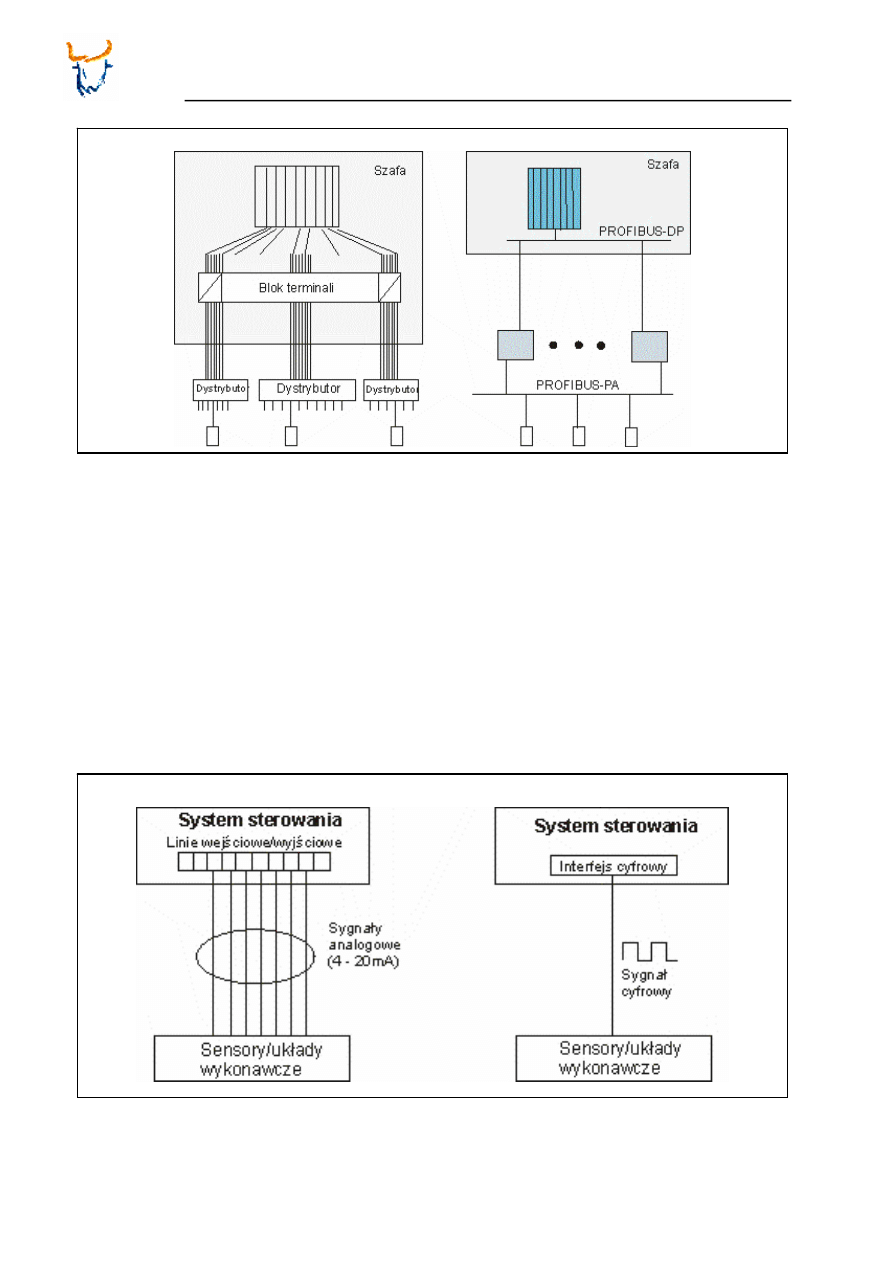
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Rys.7.1:
Uproszczona struktura systemu komunikacji bez i z siecią Profibus [Profibus PNO]
7.2
Przetwarzanie cyfrowe i interfejsy cyfrowe
Podstawowymi czynnikami decydującymi o rozwoju systemów stero-
wania jest rozwój technologii elektronowej i elektroniki, a zwłaszcza
technik cyfrowych i sieciowych. Dzięki nim możliwa stała się zamiana
analogowych sygnałów, pobieranych z czujników i wysyłanych do
układów wykonawczych, na sygnały cyfrowe. Jak pokazano na Dało to
dużą oszczędność w okablowaniu czujników, a także możliwość prze-
syłania sygnałów na znacznie większe odległości niż poprzednio (rys.
7.2).
Rys.7.2:
Przykład zastosowania technik cyfrowych do przesyłu informacji a) - analogowe
wieloprzewodowe przesyłanie sygnałów, b) - cyfrowe jedno lub wieloprzewodowe
przesyłanie sygnałów
94
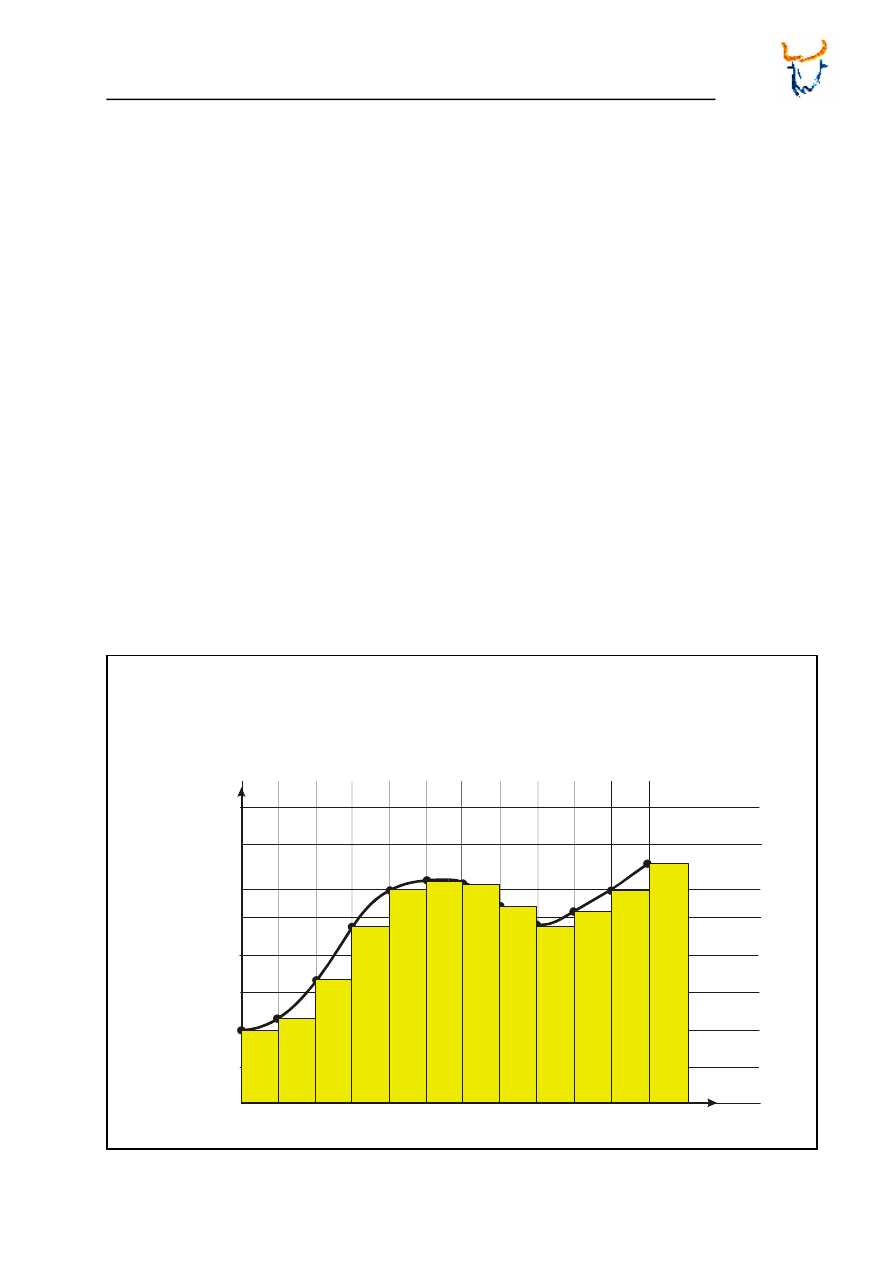
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Cyfryzacja sygnałów analogowych polega na próbkowaniu sygnału
analogowego w określonym odstępie czasu, rejestrowaniu tych warto-
ści i zamianie na odpowiadające im wartości cyfrowe. Następuje tzw.
kwantowanie sygnału analogowego. Oznacza to, że sygnał analogowy
może przyjąć tylko określone wartości z danego zakresu. Sposób
kwantyzacji na przykładzie przebiegu zmian wartości temperatury
przedstawia rys.7.3.
Wartości te są następnie kodowane w systemie binarnym, tzn. że każ-
da wartość jest przedstawiana w postaci zer i jedynek („0” i „1”). Daje
to możliwość łatwego operowania na tych wartościach a także uprasz-
cza ich przesyłanie w układach sterowania na różnych poziomach.
Przesyłanie danych w systemach może być szeregowe lub równoległe.
Szeregowe przesyłanie danych oznacza, że każdy bit informacji (0 lub
1) jest zakodowany w różny sposób i może mu w najprostszym przy-
padku odpowiadać:
- włączanie lub wyłączanie prądu,
- przełączanie wartości napięcia,
- zmiana napięcia z ujemnego na dodatnie i odwrotnie.
Istnieje również możliwość przesyłania sygnałów z wykorzystaniem
metod zmiennoprądowych, za pomocą:
- modulacji amplitudy,
- modulacji częstotliwości,
- modulacji fazy.
0
10 20
20
30 40 50 60 70 80 90
100
160
100 110
Wartość 1
Czas t (ms)
Wartość 2
Wartość 3
Wartość 4
Wartość 5
Wartość 6
Wartość 7
O
T( C)
95
Rys. 7.3:
Przykład kwantowania sygnału
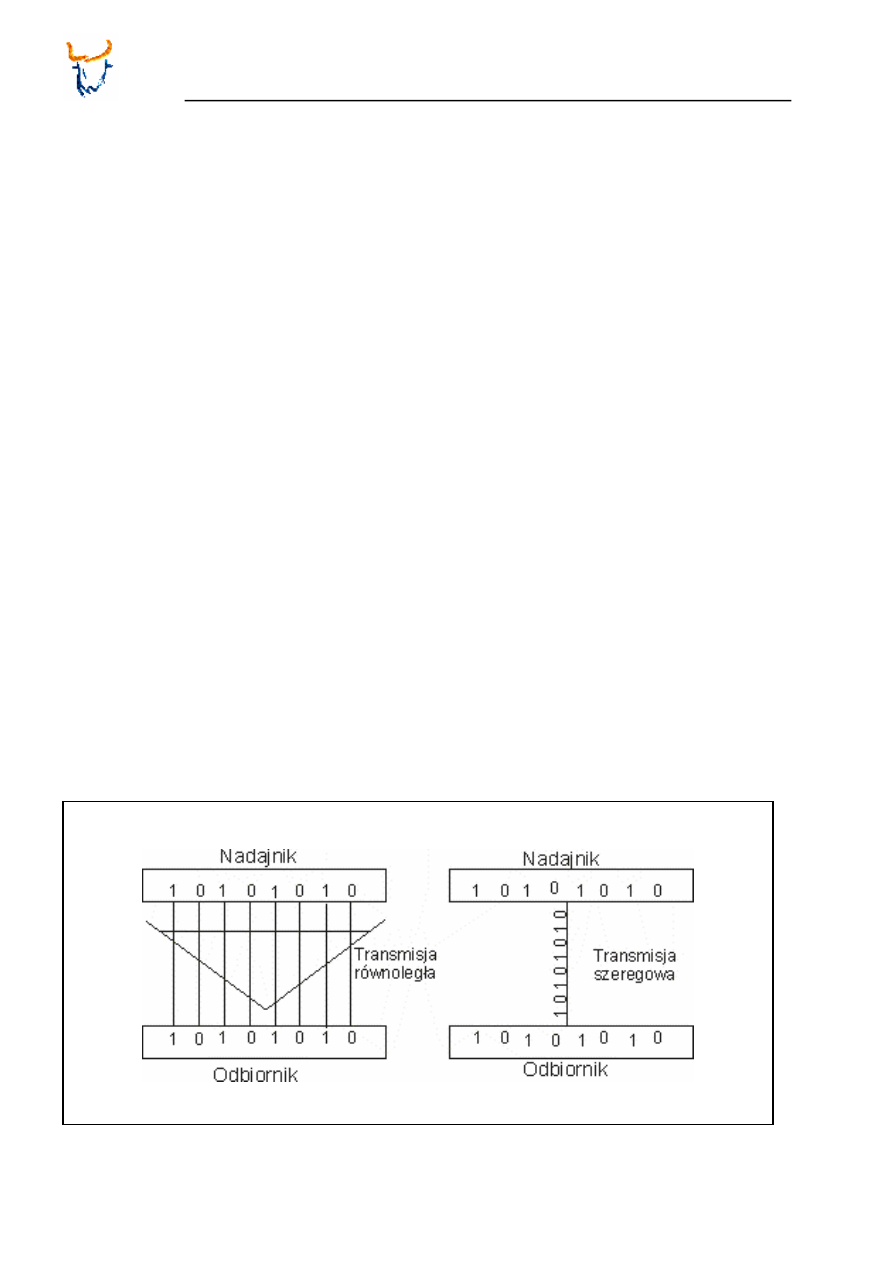
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Transmisja równoległa w najprostszym przypadku wymaga, jak to wy-
nika z przykładu pokazanego na rys.7.4 przynajmniej kilku linii np.
ośmiu linii. Przykładem takiej transmisji jest np. transmisja danych do
drukarki (znak po znaku).
Zaletą transmisji równoległej jest duża szybkość przesyłu informacji,
natomiast wadą jest duża liczba linii - co zwiększa koszty okablowania
oraz interferencja pomiędzy liniami transmisyjnymi, wzrastająca wraz z
odległością, na którą transmisja jest realizowana. Z tego tez powodu
transmisja równoległa jest realizowana na krótkie odległości.
Transmisja szeregowa w najprostszym przypadku angażuje tylko jed-
ną linię.
W systemach sterowania znalazły zastosowanie różnego rodzaju
transmisje szeregowe (zwane dalej interfejsami szeregowymi)
Rys. 7.4:
Rodzaje transmisji: a) - równoległa b) - szeregowa
96
Systemy i funkcje mechatroniczne - Podręcznik
Minos
97
W tabeli 7.1 przedstawiono podstawowe parametry interfejsów szere-
gowych
Interfejsy szeregowe
Interfejsy
równolegle
TTY(20mA) RS232(V24) RS432 RS485
IEC(IEEE
488)
Stan sygnału
Logiczne 0
/logiczna 1
20mA/0mA
+3V do +15V/ -
3Vdo -15V
-5V/+5V
+5V/-5V
-5V/+5V
+5V/-5V
+5V/ 0V
Możliwe tryby
transmisji
Asynchroniczna
pełny dupleks
Asynchroniczna
pełny dupleks
Asynchroniczna
pełny dupleks
Asynchroniczna
pełny dupleks
Asynchroniczna
pełny dupleks
Maksymalna
długość kabla
1000m 30m 1200m
1200m 2-20m
Liczba linii
4
Min 3
2 danych
(1 ziemia)
4(5)
2 nadajnik
2 odbiornik
(1 ziemia)
2(3)
2 danych
(1 ziemia)
16
8danych
3 potwierdzenia
5 sterowania
Abonentów na
jeden nadajnik
/odbiornik
1/1 1/1 1/10
Bez wzmacniaków
32 nadajników/
odbiorników
bez wzmacnia-
ków)
1/15
Maksymalna
prędkość
transmisyjna
19,2 kb/s
19,2 kb/s
10 Mb/s
10 Mb/s
2 Mb/s
Zastosowanie Terminale,
wyświetlacze,
układy CNC
Peryferia kom-
puterów, urzą-
dzenia automa-
tyki
Peryferia kompute-
rów, urządzenia
automatyki
Peryferia PC,
sieci przemy-
słowe w auto-
matyce
Przyrządy i urzą-
dzenia sterujące
do użytku w
laboratoriach
Cechy Odporne
na
szumy, wskaza-
ne do operacji
sieciowych,
bezpieczna
transmisja da-
nych
Odporne na
szumy,
Odporne(niewraż-
liwe) na szumy,
Odporne na
szumy,
Podatne, wrażli-
we na szumy na
zakłócenia
Tabela 7.1:
Podstawowe parametry interfejsów szeregowych[Frank Blasinger, Manfred Schlei-
cher, Digital Interfaces and Bus Systems for Communication]
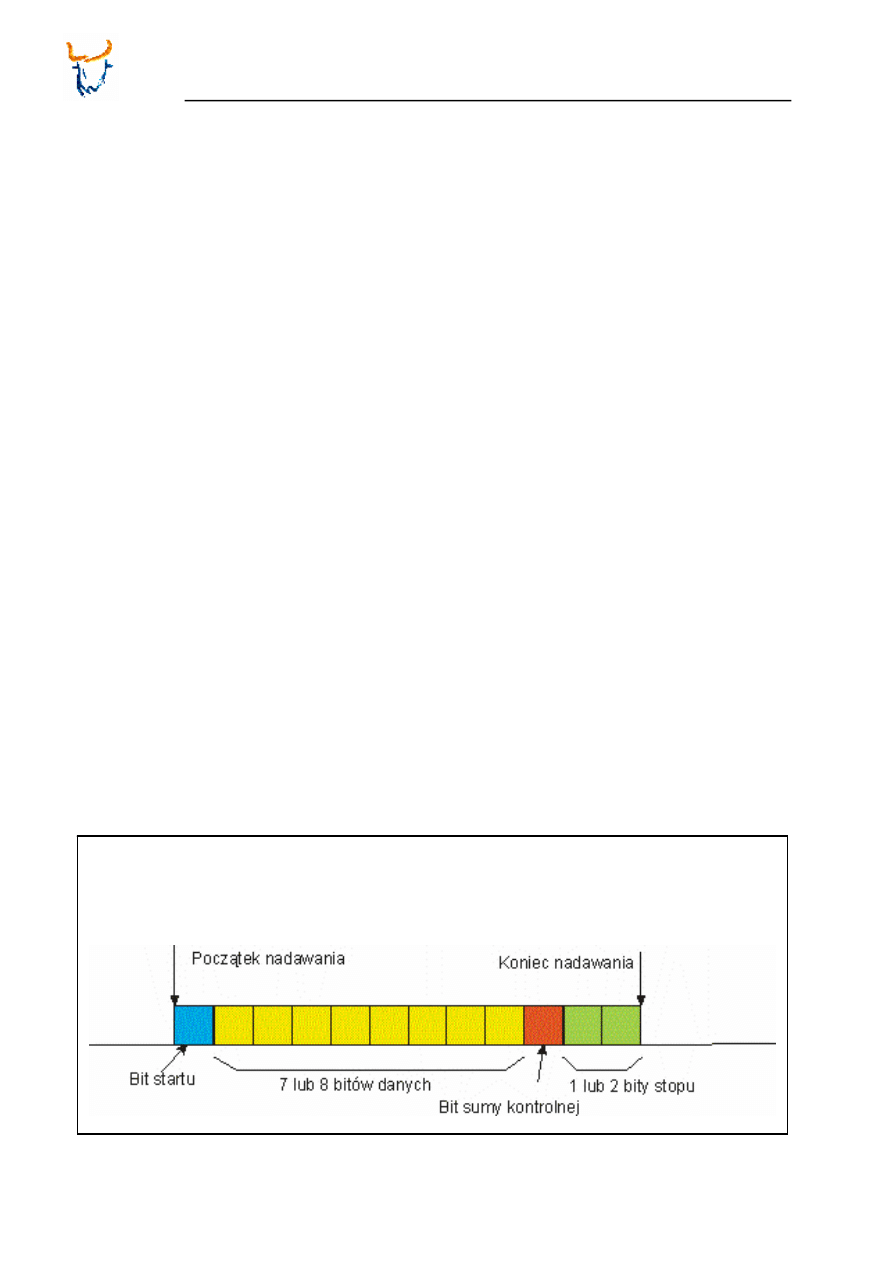
Systemy i funkcje mechatroniczne - Podręcznik
Minos
7.2.1
Interfejs RS 232 C (w Europie oznaczany symbolem V24)
Interfejs RS232C jest standardem połączenia między nadajnikiem a
odbiornikiem. Jest to standard opisujący interfejs pomiędzy urządze-
niem końcowym dla danych (DTE - Data Terminal Equipment) a urzą-
dzeniem komunikacyjnym dla danych (DCE - Data Communication
Equipment), czyli stanowi połączenie pomiędzy terminalem i mode-
mem. Umożliwia on komunikację pomiędzy dwoma terminalami DTE.
Interfejs zapewnia zgodność komunikacyjną pomiędzy współpracują-
cymi urządzeniami, dzięki:
- określeniu poziomu sygnałów złącza,
- zdefiniowaniu konfiguracji wyprowadzeń,
- ograniczeniu do niezbędnego minimum liczby linii sterujących i da-
nych.
Standard RS232C umożliwia transmisję danych na odległość do 15 m
z szybkością max 20kbitów/s. Umożliwia połączenie dwóch urządzeń,
jednego nadajnika i jednego odbiornika. Układ magistrali ma charakter
niesymetryczny, co ogranicza odległość i szybkość transmisji i jest po-
zbawione mechanizmów ochrony przed zakłóceniami.
Poziomy napięć dla RS232 wynoszą:
- stan L
+3V - +15V
- stan H
-15V - -3V
Możliwa jest w tym standardzie zarówno transmisja znakowa asyn-
chroniczna jak i transmisja synchroniczna. Na rys 7.5 przedstawiono
transmisje asynchroniczną znakową (tzw. start-stopową)
W przypadku transmisji synchronicznej brak jest sygnalizacji początku
i końca znaku, pozostają tylko znaczniki początku i końca bloku. Ten
rodzaj transmisji wykorzystywany jest do przesyłania dużych bloków
danych. Bity pojawiają się synchronicznie z sygnałem taktującym. W
standardzie tym możliwe są następujące rodzaje transmisji:
- simpleksowa jednokierunkowa,
- półdupleksowa (niejednoczesne nadawanie obu stacji),
- dupleksowa (jednoczesne nadawanie obu stacji).
Rys.7.5:
Transmisja asynchroniczna złączem RS232C
98
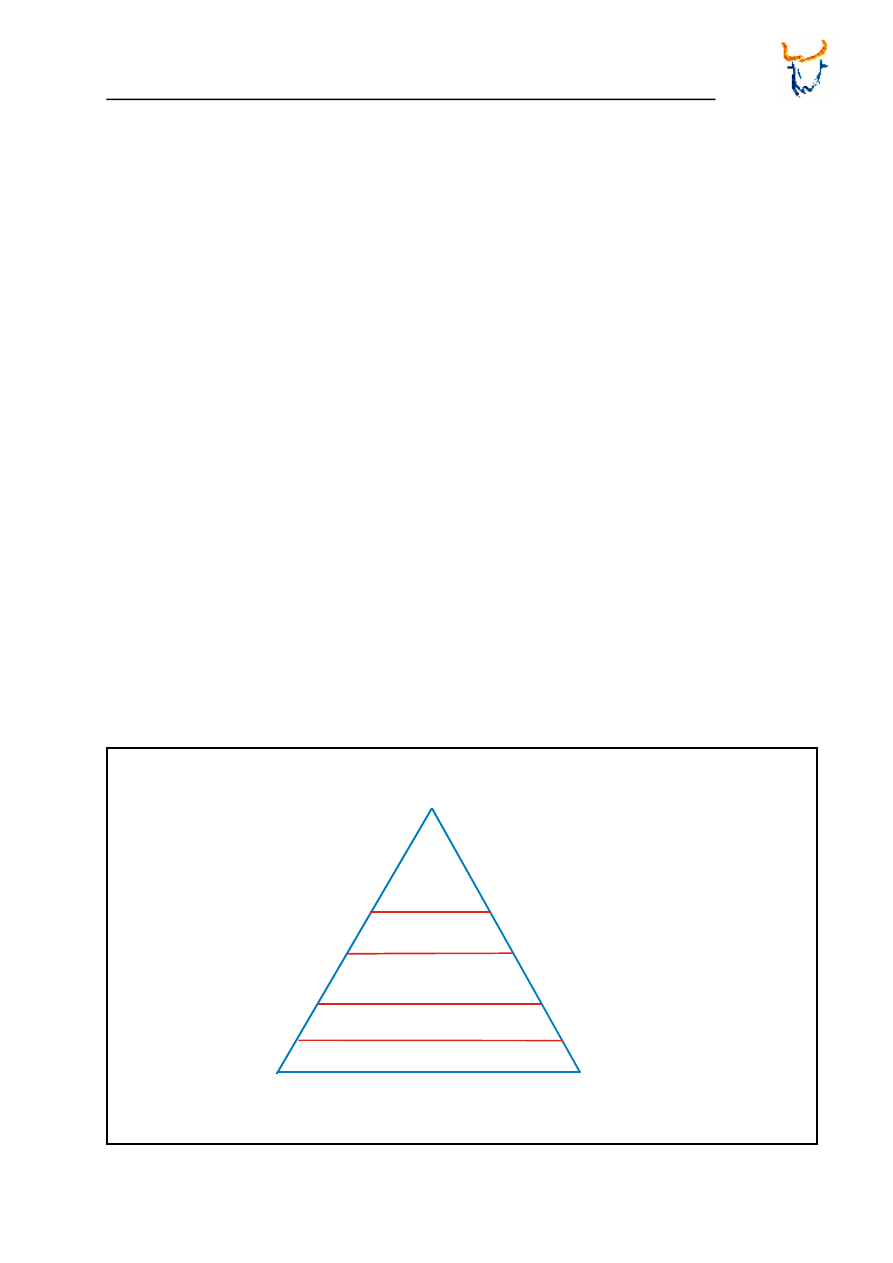
Systemy i funkcje mechatroniczne - Podręcznik
Minos
7.3
Sieci komunikacyjne i zarządzanie nimi
7.3.1
Hierarchia
komunikacji
Na rys.7.6 przedstawiono strukturę hierarchii komunikacji w przedsię-
biorstwie, od najniższego poziomu (czujników) aż do poziomu zarzą-
dzania przedsiębiorstwem.
Możemy w niej wyróżnić pięć poziomów, od najniższego do najwyż-
szego:
-poziom czujników i układów wykonawczych (polowy),
-poziom sterowania grupą,
-poziom sterowania procesem,
-poziom sterowania produkcją,
-poziom sterowania przedsiębiorstwem.
Sieci w tej strukturze muszą spełniać różne kryteria z uwagi na różne
wymagania, dotyczące przetwarzania danych na różnych poziomach
sterowania. Przesyłane są różne dane i różne ich typy w zależności od
poziomu. Dla przykładu dane na poziomie najniższym powinny być
przesyłane natychmiastowo, a reakcja powinna następować w jak naj-
krótszym czasie. Pracę w takim trybie często określamy jako pracę w
czasie rzeczywistym.
Poziom polowy
Poziom sterowania
grupą
Poziom sterowania
procesem
Poziom sterowania
produkcją
Poziom sterowania
przedsiębiorstwem
Sterowanie procesem
funkcje polowe
Pomiary, operacje,
sterowanie, bezpieczeństwo
Zarządzanie grupami procesów,
urządzeniami procesowymi
i aparatami
Zarządzanie fabryką,
firmą
Zarządzanie
przedsiębiorstwem
Rys..7.6:
Piramida komunikacji w przedsiębiorstwie
99
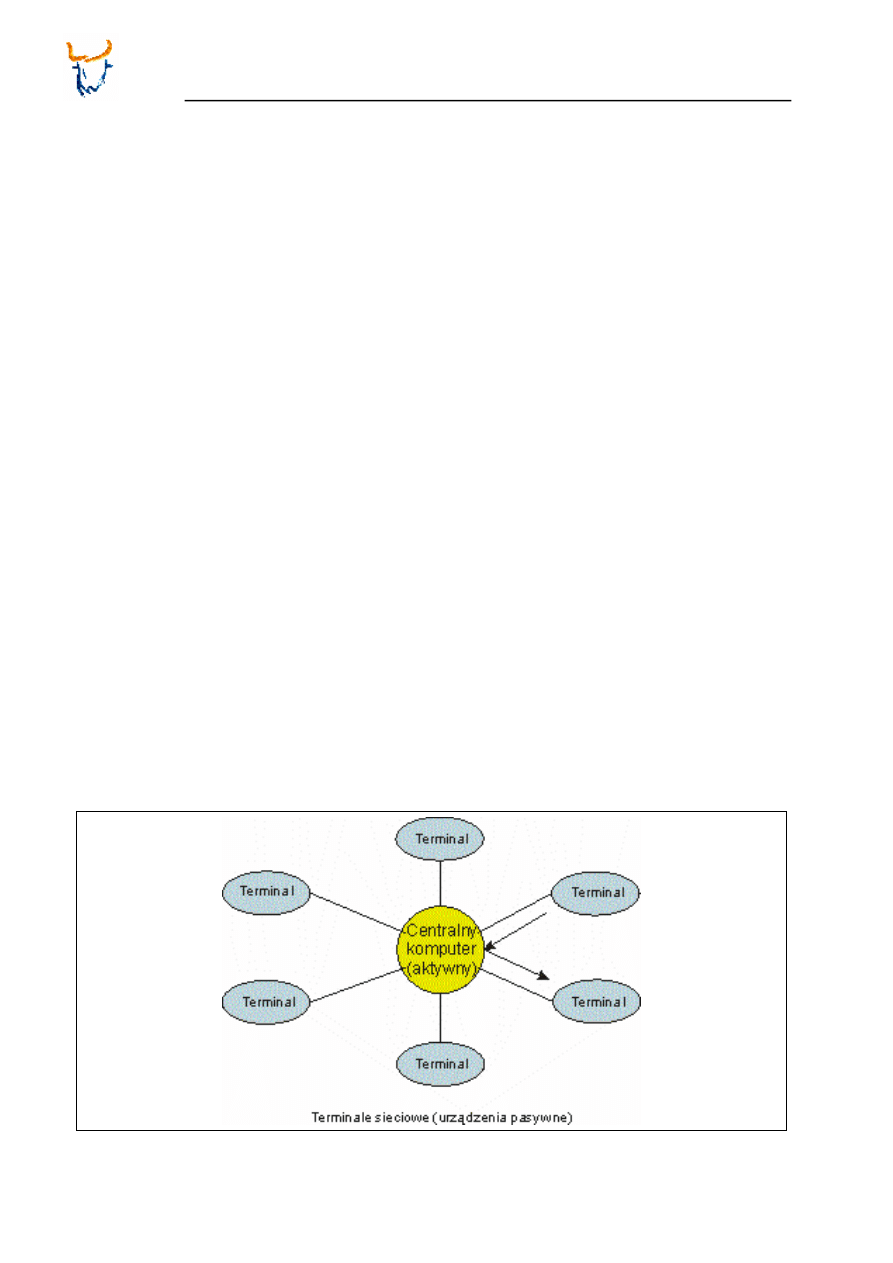
Systemy i funkcje mechatroniczne - Podręcznik
Minos
7.3.2 Sieci i bus systemy polowe
Urządzenia przetwarzające dane, układy automatyki mogą być połą-
czone ze sobą wspólną siecią komunikacyjną. Sieci te mogą mieć róż-
ną strukturę w zależności od zastosowania, żądanych parametrów,
oraz wymaganego bezpieczeństwa. Można wyróżnić następujące pod-
stawowe typy sieci:
-sieć typu gwiazda,
-sieć typu pierścień,
-sieć typu magistrala (bus).
Praktycznie w każdą sieć możemy traktować jako połączenie tych
podstawowych typów sieci. Na rysunkach od 7.7 do 7.9 przedstawiono
poszczególne typy sieci.
Sieć typu gwiazda
W strukturze tej wszystkie informacje przesyłane są (przechodzą)
przez centralny węzeł sieci (może to być komputer lub inne urządzenie
sieciowe pełniące rolę węzła sieci. Węzeł ten steruje przepływem in-
formacji w sieci). Poszczególne terminale (rys.7 ) nie mogą się komu-
nikować bezpośrednio pomiędzy sobą. Powoduje to silną zależność od
sprawności węzła, jego uszkodzenie powoduje uszkodzenie całej sieci.
W tego typu sieci dodanie nowego użytkownika wymaga tylko dodania
nowych przewodów. Dlatego jeśli planujemy rozbudowę sieci należy to
uwzględnić.
Rys. 7.7:
Sieć typu gwiazda
100
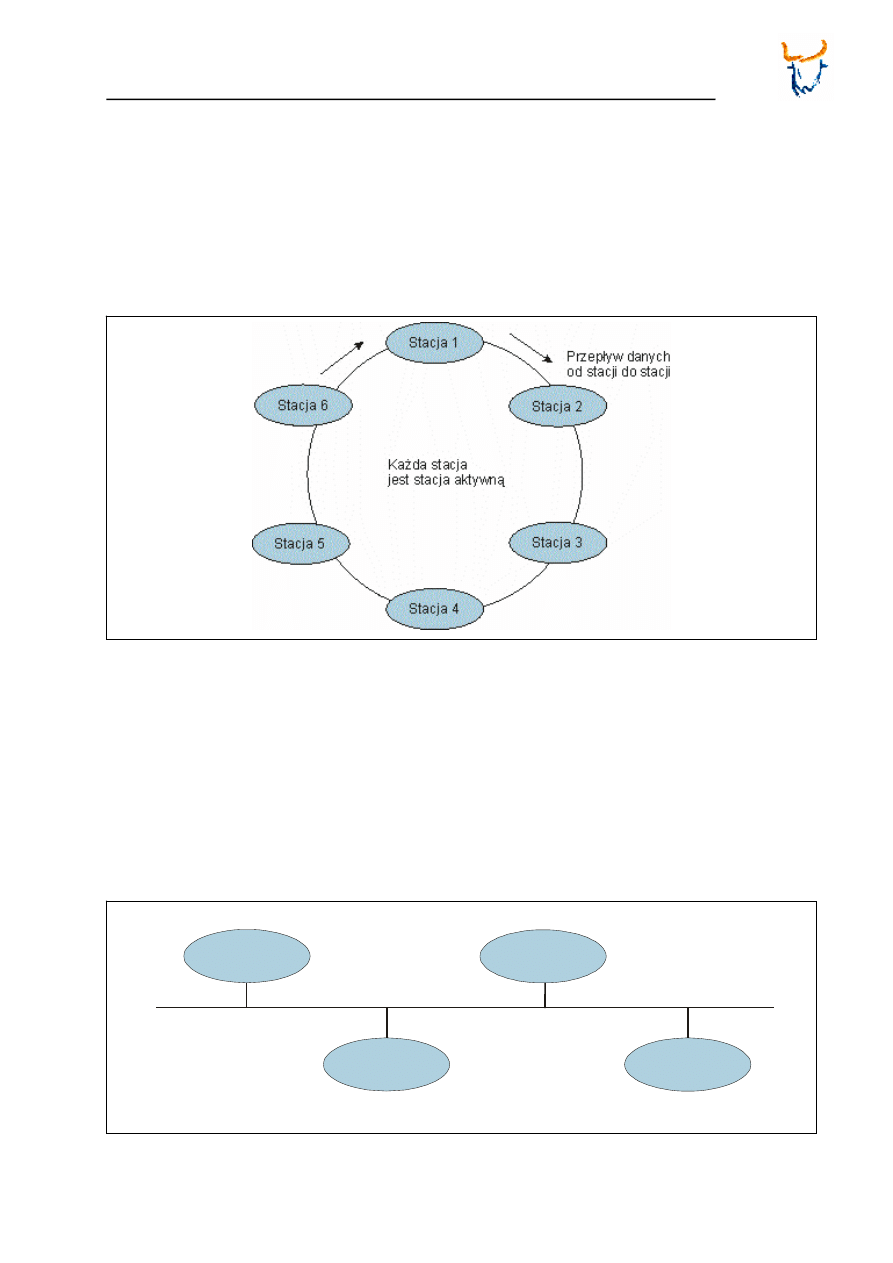
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Sieć typu pierścień
W strukturze tej sieci informacje przesyłane są pomiędzy kilkoma ter-
minalami połączonymi w pierścień (rys.7.8). Każdy terminal nadaje i
odbiera dane. Jeżeli stacja odbierze dane, kopiuje je oraz zaznacza,
że je odebrała i przesyła dalej do następnego terminala. Tym sposo-
bem nadajnik, który wysłał informacje rozpoznaje, że zostały one po-
prawnie odebrane.
Rys. 7.8:
Sieć typu pierścień (ring)
Sieć typu magistrala
Najbardziej znana i rozpowszechnioną strukturą sieci jest struktura ty-
pu magistrala zwana także liniową. Wszystkie urządzenia podłączone
są do jednej wspólnej linii danych - magistrali. Teoretycznie każde
urządzenie w tej sieci może się komunikować z każdym innym.
Wszystkie urządzenia mają takie same prawa dostępu. Może to powo-
dować kolizje na magistrali i dane mogą być tracone. Dlatego tez w ta-
kich przypadkach stosowane są odpowiednie procedury dostępu które
regulują sposób dostępu do sieci.
Rys. 7.9:
Siec typu magistrala (bus)
Stacja 1
Stacja 2
Stacja 3
Stacja 4
Przepływ danych jest sterowany określoną metodą dostępu do magistrali
101
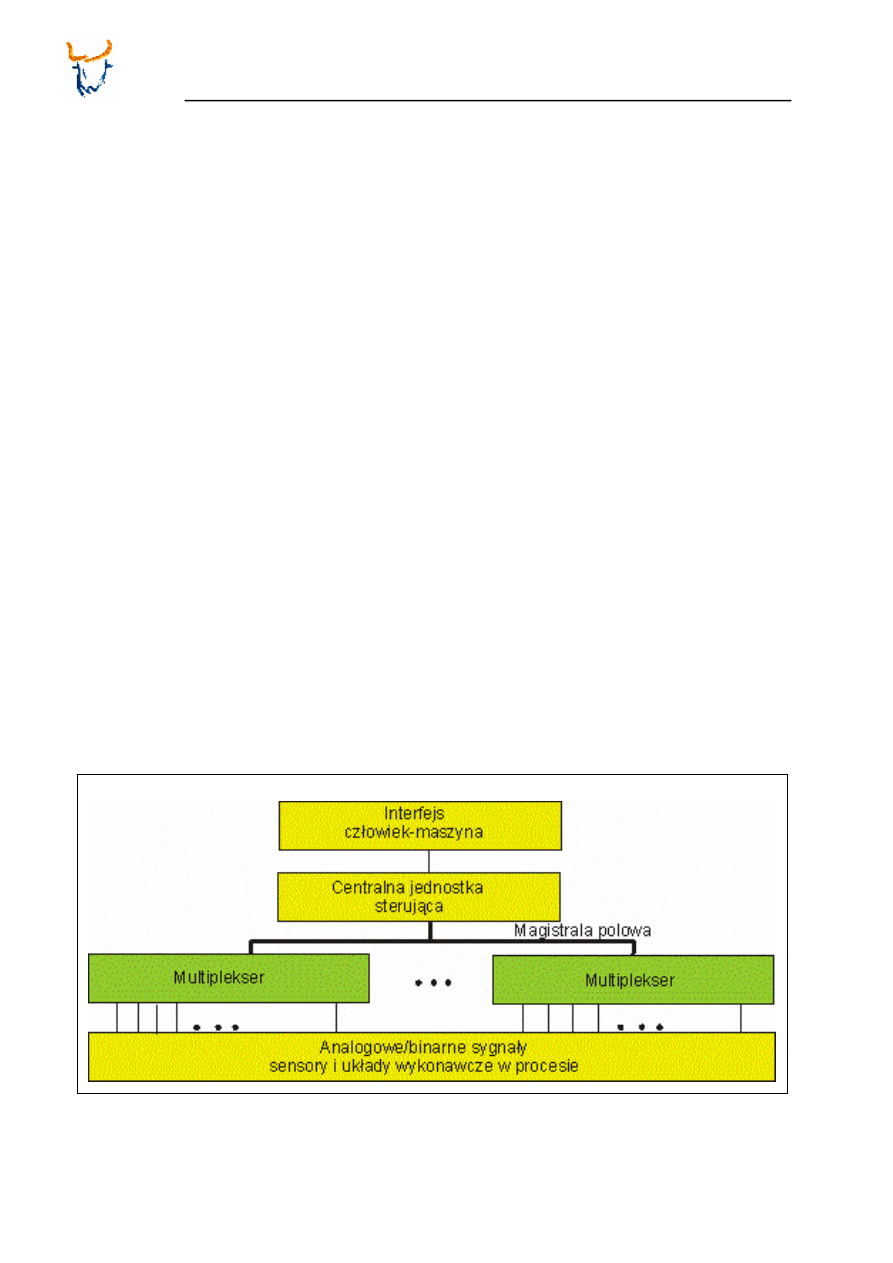
Systemy i funkcje mechatroniczne - Podręcznik
Minos
7.3.3 Rodzaje
sterowania sieci polowych.
Fieldbus jest w pełni cyfrowym dwukierunkowym systemem komunika-
cji szeregowej, który łączy elementy pomiarowe i sterujące, takie jak
czujniki, elementy wykonawcze i urządzenia sterujące.
Stanowi sieć łączącą urządzenia wykorzystywane w procesie sterowa-
nia i zarządzania oraz automatyzacji procesu produkcji. Posiada zaim-
plementowane mechanizmy służące do przekazywania danych steru-
jących w czasie rzeczywistym.
Umożliwia decentralizację sterowania procesem produkcji, a także wy-
korzystanie „inteligentnych” urządzeń, co wpływa na zwiększenie ela-
styczności systemu komunikacji oraz zmniejsza koszty.
7.3.3.1
Sterowanie scentralizowane
W scentralizowanym sterowaniu wszystkie sygnały z procesów są
przesyłane do centralnego układu sterowania. Typowym przykładem
są sterowniki PLC, do których przyłączone są wszystkie czujniki i ukła-
dy wykonawcze. Inną metodą centralizacji jest wykorzystanie multi-
plekserów i sieci przemysłowej do zbierania wszystkich analogowych i
cyfrowych sygnałów wejściowych i wyjściowych. Sygnały te są zbiera-
ne w multiplekserze, a następnie przesyłane siecią do jednostki steru-
jącej (rys. 7.10).
Zaletą scentralizowanego sterowania poprzez sieć przemysłową z wy-
korzystaniem multiplekserów jest:
• krótka droga sygnałów pomiarowych, co jest bardzo ważne w przy-
padku sygnałów krytycznych czasowo,
• niskie koszty instalacji w porównaniu do konwencjonalnych metod,
• duża niezawodność z uwagi na transmisję cyfrową,
• łatwa modyfikacja i rozbudowa sieci.
Rys. 7.10:
Przykład połączenia sensorów poprzez multipleksery ze sterownikiem w scentral-
izowanym układzie sterowania [Frank Blasinger, Manfred Schleicher, Digital Inter-
faces and Bus Systems for Communication]
102
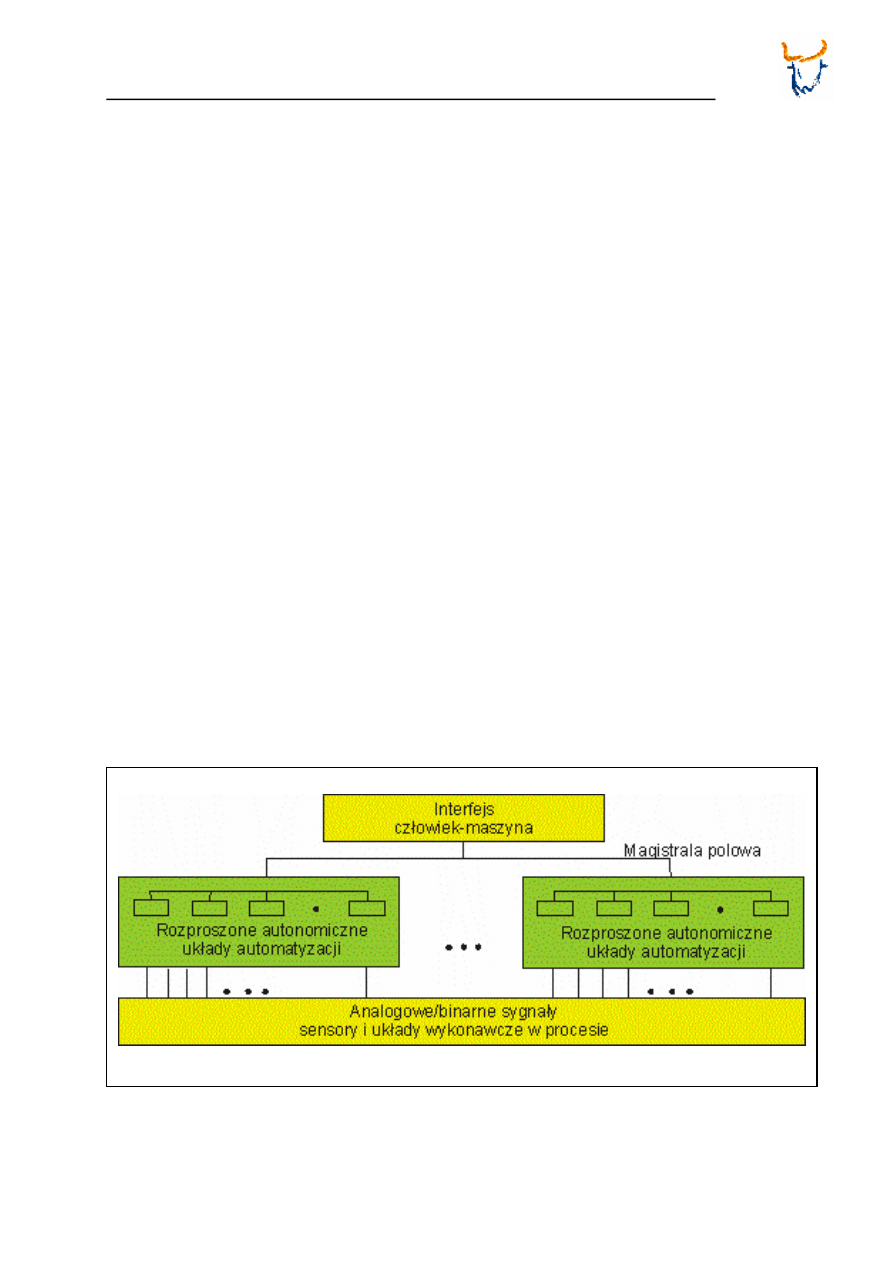
Systemy i funkcje mechatroniczne - Podręcznik
Minos
7.3.3.2 Rozproszone sterowanie
Aktualną tendencją jest przenoszenie funkcji wykonywanych przez
przeciążoną zwykle jednostkę centralną na urządzenia sieciowe, na
niższych poziomach i wyposażanie ich w inteligencję lokalną. Dzięki
inteligencji możliwe jest realizowanie przez te urządzenia podstawo-
wych funkcji sterowaniowych. Sterowanie takie nazywa się sterowa-
niem rozproszonym z lokalną inteligencją.
Rozproszone układy automatyki charakteryzują się:
− krótkim czasem reakcji, pomijalnie małym w porównaniu do czasu
reakcji sieci,
− dużą dostępnością dla niezależnych urządzeń,
− łatwą modyfikacją i rozbudową,
− strukturą zorientowaną na zadania i użytkownika,
− prostotą i przezroczystością oprogramowania, oraz prostotą konfi-
guracji i ustawianiem parametrów pracy układu.
Rys 7.11:
Przykład połączenia sensorów w układzie ze sterowaniem rozproszonym oraz
lokalną inteligencją [Frank Blasinger, Manfred Schleicher, Digital Interfaces and
Bus Systems for Communication]
103
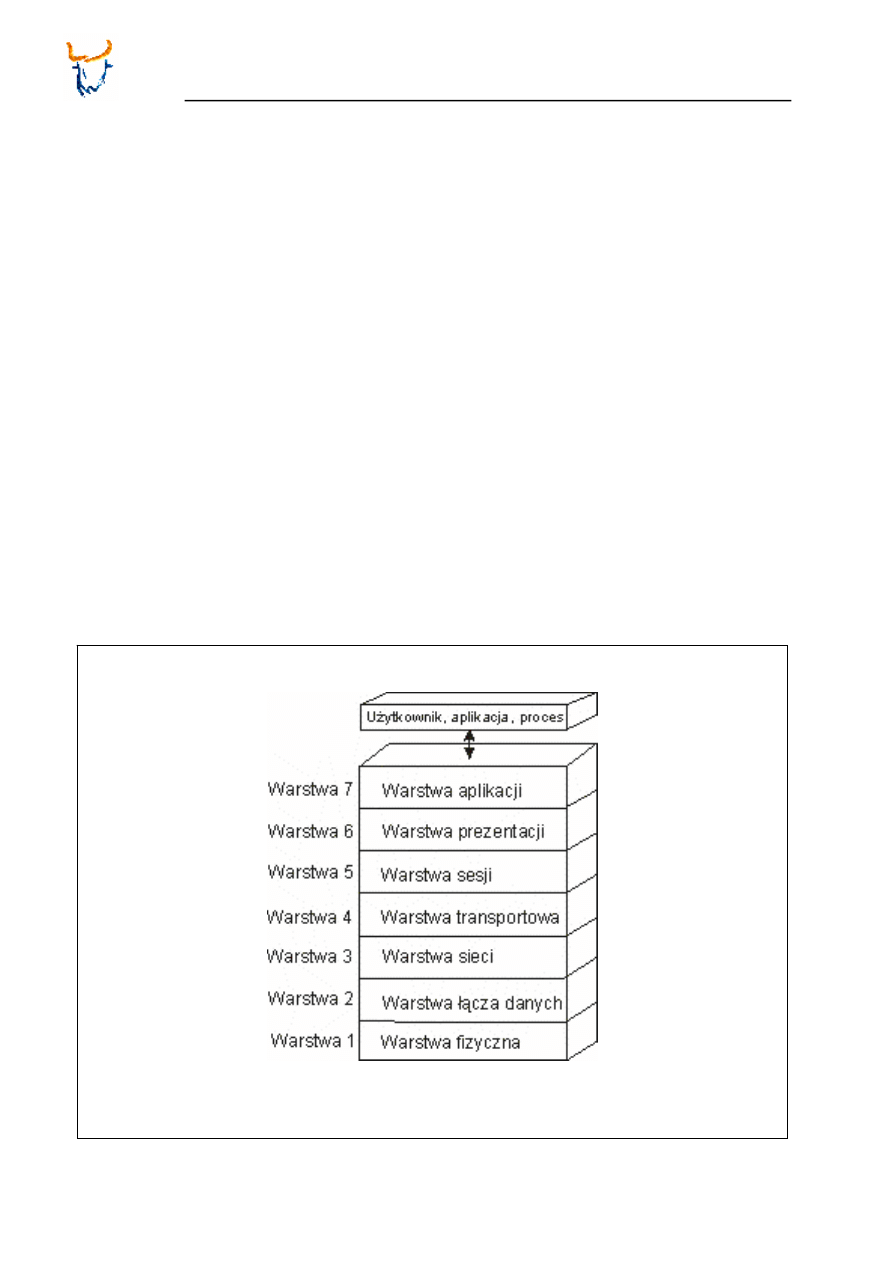
Systemy i funkcje mechatroniczne - Podręcznik
Minos
7.4 Protokół sieci komunikacyjnej. Model OSI
Model OSI to zdefiniowany przez organizacje ISO oraz ITU-T standard
opisujący strukturę komunikacji sieciowej. Model OSI jest traktowany
jako model odniesienia dla większości rodzin protokołów komunikacji.
Najpopularniejszy to model OSI-RM (ang. OSI Reference Model).
Podstawowym założeniem modelu jest podział systemów sieciowych
na 7 całkowicie niezależnych warstw (ang. layers). Dla Internetu sfor-
mułowano uproszczony Model DoD, który ma tylko 4 warstwy. Model
referencyjny OSI dzieli procesy zachodzące podczas sesji komunika-
cyjnej na siedem warstw funkcjonalnych, które zorganizowane są we-
dług naturalnej sekwencji zdarzeń zachodzących podczas sesji komu-
nikacyjnej. Warstwy od 1 do 3 umożliwiają dostęp do sieci, a warstwy
od 4 do 7 obsługują logistycznie komunikację końcową.
W modelu tym możemy wyróżnić dwie podstawowe strefy:
-niższą, lub transportową (zorientowaną na komunikację; są to war-
stwy od 1 do 4,
-wyższą, lub strefę zorientowaną na użytkownika, utworzone przesz
warstwy od 5 do 7.
Rys. 7.12:
Model siedmiowarstwowy komunikacji sieciowej OSI-RM
104

Systemy i funkcje mechatroniczne - Podręcznik
Minos
105
Warstwa fizyczna(1).
Warstwa ta jest warstwą najniższą. Jest ona
odpowiedzialna za przesyłanie strumieni bitów. Odbiera ramki danych
z warstwy 2, czyli warstwy łącza danych i przesyła szeregowo, bit po
bicie, całą ich strukturę oraz zawartość. Jest ona również odpowie-
dzialna za odbiór kolejnych bitów przychodzących strumieni danych.
Strumienie te są następnie przesyłane do wyższej warstwy łącza da-
nych, w celu ich ponownego ukształtowania.
Warstwa łącza danych(2).
Jest ona drugą warstwą modelu OSI.. Jak
każda z warstw, pełni ona dwie zasadnicze funkcje: odbierania i nada-
wania. Odpowiada ona za końcową zgodność przesyłania danych. W
zakresie zadań związanych z przesyłaniem, warstwa łącza danych jest
odpowiedzialna za upakowanie instrukcji, danych itp. w tzw. ramki.
Ramka jest strukturą rodzimą - czyli właściwą dla warstwy łącza da-
nych, która mieści ilość informacji właściwą dla pomyślnego przesyła-
nia danych przez sieć lokalną do ich miejsca docelowego. Pomyślna
transmisja danych zachodzi wtedy, gdy dane osiągają miejsce doce-
lowe w postaci niezmienionej, w stosunku do postaci, w której zostały
wysłane. Ramka musi więc zawierać mechanizm umożliwiający wery-
fikowanie integralności jej zawartości podczas transmisji. W wielu sy-
tuacjach wysyłane ramki mogą nie osiągnąć miejsca docelowego lub
ulec uszkodzeniu podczas transmisji. Warstwa łącza danych jest od-
powiedzialna za rozpoznawanie i naprawę każdego takiego błędu.
Warstwa łącza danych jest również odpowiedzialna za ponowne skła-
danie otrzymanych z warstwy fizycznej strumieni binarnych i umiesz-
czanie ich w ramkach. Ze względu na fakt przesyłania zarówno struk-
tury, jak i zawartości ramki, warstwa łącza danych nie tworzy ramek od
nowa. Buforuje ona przychodzące bity dopóki nie uzbiera w ten spo-
sób całej ramki.
Warstwa sieci(3).
Warstwa sieci jest odpowiedzialna za określenie
trasy transmisji między komputerem-nadawcą a komputerem-odbiorcą.
Warstwa ta nie ma żadnych wbudowanych mechanizmów korekcji błę-
dów i w związku z tym musi polegać na wiarygodnej transmisji końco-
wej warstwy łącza danych. Warstwa sieci używana jest do komuniko-
wania się z komputerami znajdującymi się poza lokalnym segmentem
sieci LAN. Umożliwia im to własna architektura trasowania, niezależna
od adresowania fizycznego warstwy 2. Korzystanie z warstwy sieci nie
jest obowiązkowe. Wymagane jest jedynie wtedy, gdy komputery ko-
munikujące się znajdują się w różnych segmentach sieci przedzielo-
nych routerem.
Warstwa transportu(4).
Warstwa ta pełni funkcję podobną do funkcji
warstwy łącza w tym sensie, że jest odpowiedzialna za końcową inte-
gralność transmisji. Jednak w odróżnieniu od warstwy łącza danych -
warstwa transportu umożliwia tę usługę również poza lokalnymi seg-
mentami sieci LAN. Potrafi bowiem wykrywać pakiety, które zostały
przez routery odrzucone i potrafi automatycznie generować żądanie
ich ponownej transmisji. Warstwa transportu identyfikuje oryginalną
sekwencję pakietów i ustawia je w oryginalnej kolejności przed wysła-
niem ich zawartości do warstwy sesji.
Warstwa sesji(5).
Piątą warstwą modelu OSI jest warstwa sesji. Jest
ona rzadko używana. Wiele protokołów funkcje tej warstwy dołącza do
swoich warstw transportowych. Zadaniem warstwy sesji modelu OSI

Systemy i funkcje mechatroniczne - Podręcznik
Minos
106
jest zarządzanie przebiegiem komunikacji podczas połączenia miedzy
dwoma komputerami. Przebieg tej komunikacji nazywany jest sesją.
Warstwa ta określa, czy komunikacja może zachodzić w jednym, czy
obu kierunkach. Gwarantuje ona również zakończenie wykonywania
bieżącego żądania przed przyjęciem kolejnego.
Warstwa prezentacji(6).
Warstwa prezentacji jest odpowiedzialna za
zarządzanie sposobem kodowania wszelkich danych. Nie każdy kom-
puter korzysta z tych samych schematów kodowania danych, więc
warstwa prezentacji odpowiedzialna jest za translację między nie-
zgodnymi schematami kodowania danych. Warstwa ta może być rów-
nież wykorzystywana do niwelowania różnic między formatami zmien-
nopozycyjnymi, jak również do szyfrowania i rozszyfrowywania wia-
domości.
Warstwa aplikacji(7).
Najwyższą warstwą modelu OSI jest warstwa
aplikacji. Pełni ona rolę interfejsu pomiędzy aplikacjami użytkownika a
usługami sieci. Warstwę tę można uważać za inicjującą sesje komuni-
kacyjne.
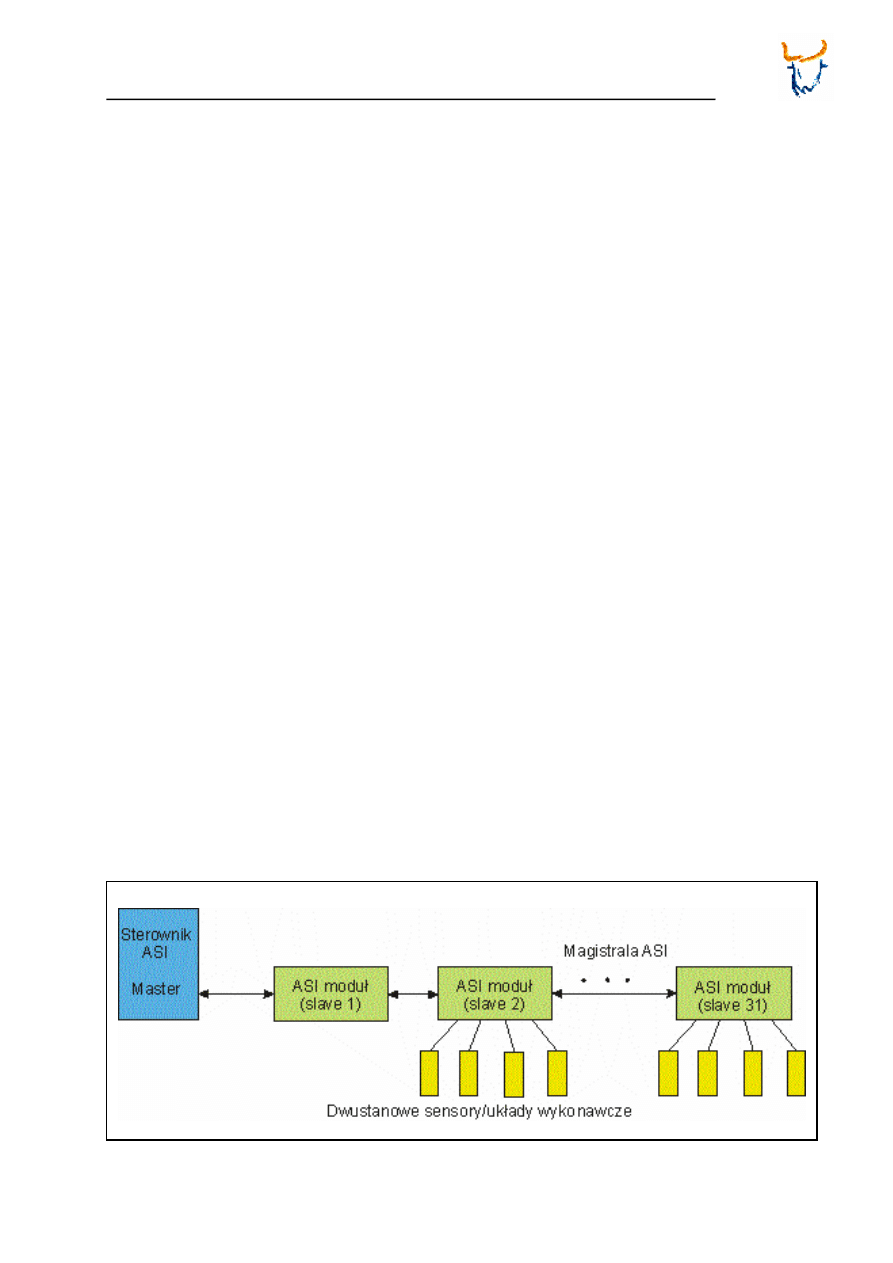
Systemy i funkcje mechatroniczne - Podręcznik
Minos
7.5
Rodzaje przemysłowych sieci komunikacyjnych (industrial bus systems)
7.5.1 Sieć typu AS-I (Fieldbus AS Interface)
Protokół Interfejsu AS (sensor-układ wykonawczy, actuator-sensor)
został stworzony w Niemczech w 1994 roku przez konsorcjum fabryk
wytwarzających układy automatyki (Festo, IFM, Pepperl+Fuchs, Sie-
mens, ASI Verein).
System AS-I jest prostą metodą połączenia sensorów i układów wyko-
nawczych na najniższym poziomie (poziom polowy).
Pierwotnie interfejs ten powstał jako tania metoda adresowania poje-
dynczych sensorów w przemysłowych zastosowaniach automatyzacji.
Interfejs zyskał popularność z uwagi na duże możliwości, prostotę in-
stalacji oraz pracy, jak też z uwagi na niskie koszty adresowania urzą-
dzeń. Transmisja jest w nim ograniczona do prostej informacji (włą-
czony lub wyłączony). Dlatego też nie jest to interfejs użyteczny dla
systemów gdzie należy przesyłać różne wartości, ale jest bardzo wy-
godnym systemem dla realizacji prostych zadań, takich jak zbieranie
danych o poziomie napełnienia lub danych z czujników ciśnienia. Sys-
tem ma strukturę master/ slave.
Każdy segment może zawierać do 31 urządzeń. Zapewnia to 124 wej-
ścia i 124 wyjścia, dając w sumie pojemność 248 I/O wejść/wyjść na
pojedynczy segment wersji 2.0. W wersji 2.1 podwojona została liczba
urządzeń na jeden segment do 62, dając w rezultacie 248 wejść i 186
wyjść, co umożliwia stworzenie sieci o pojemności 434 punktów wej-
ścia/wyjścia (patrz. rys. 7.13)
Każdy układ podrzędny (Slave) jest połączony z drugim, a także z
układem nadrzędnym (Master), za pomocą dwóch przewodów, które
są wykorzystywane do zasilania układu i do transmisji danych. Czas
przeglądu wszystkich 31 urządzeń podwykonawczych wynosi ok. 5ms.
ASI jest prostym, ekonomicznym systemem, który może zastąpić
wcześniejsze dawniej stosowane rozwiązania. Maksymalna odległość,
dla której może być realizowana transmisja, wynosi 100m.
Rys.7.13:
Struktura systemu AS-I [AS-I International Association]
107
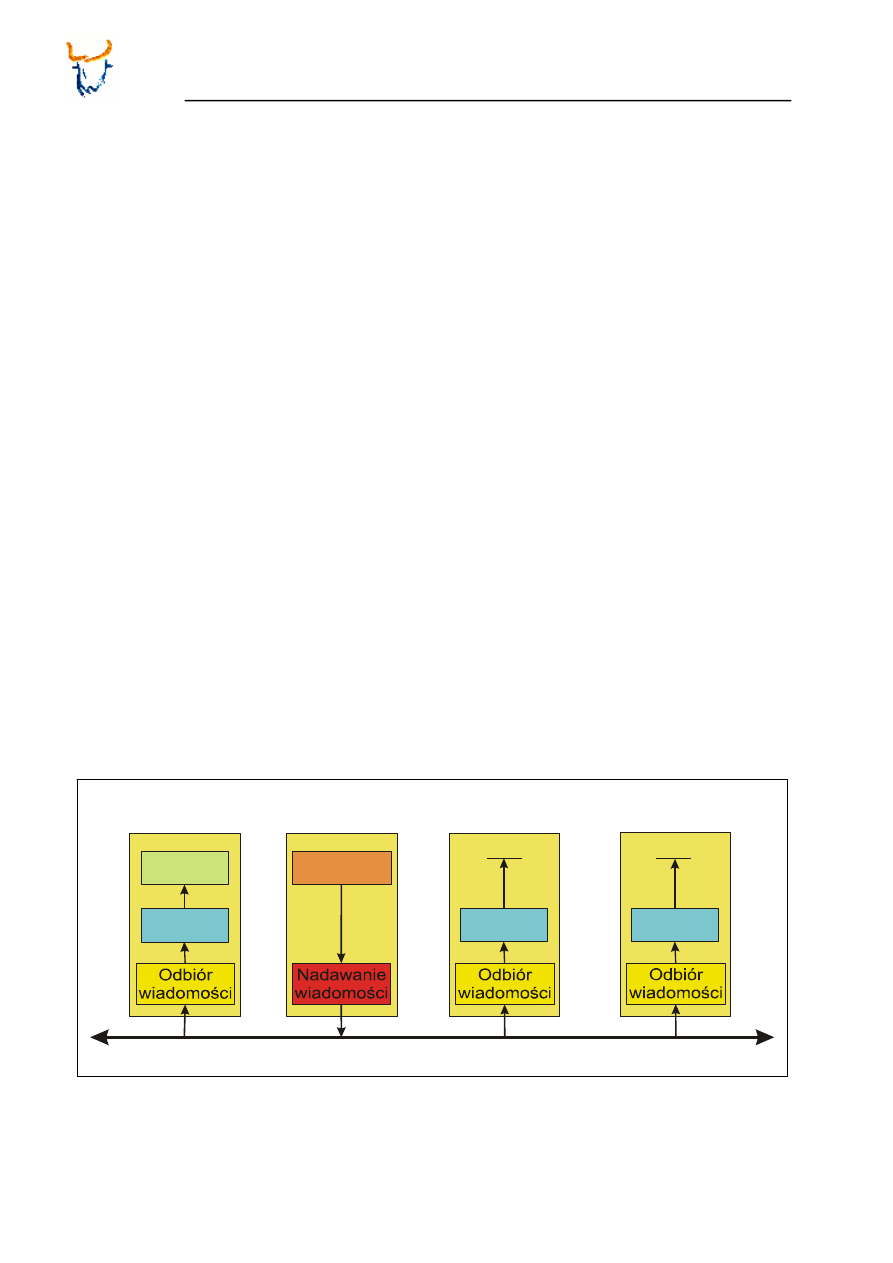
Systemy i funkcje mechatroniczne - Podręcznik
Minos
7.5.2
Sieć typu Fieldbus CAN o strukturze otwartej (Field bus CAN open)
Sieć CAN (Controller Area Network) jest standardem komunikacyjnym
opracowanym w roku 1989 przez firmę Bosch dla sterowania układami
pomiarowymi i wykonawczymi w samochodach. Sieć ta znalazła za-
stosowanie zarówno w samochodach jak i w przemyśle, w sterowaniu
ruchem drogowym i kolejowym, w aparaturze medycznej, automatyce
budynków, w systemach przeciwpożarowych.
Najczęściej spotyka się sieci CAN o topologii magistralowej, ale moż-
liwe jest również łączenie węzłów w układ gwiazdy. Początkowo ko-
munikacja wykorzystywała jako nośnik danych jedynie skrętkę ekra-
nowaną. Obecnie wykorzystywane są również inne nośniki danych ta-
kie jak np. światłowód, fale radiowe, podczerwień i sieć energetyczna.
W zależności od użytego nośnika, w sieci CAN można przesyłać dane
z prędkością do 1 Mbit/s, na odległość do 40 m lub 50 kbit/s przy odle-
głości do 1 km. W sieci CAN węzły nie mają adresów. Zamiast adre-
sów wiadomości posiadają 11-to bitowe identyfikatory (specyfikacja
CAN 2.0 A) lub 29-cio bitowe identyfikatory (specyfikacja CAN 2.0 B),
co pozwala na używanie w systemie 211 lub 229 (w formacie rozsze-
rzonym) różnych wiadomości. Jak w większości sieci o topologii magi-
stralowej tak i tu przyjęto komunikację rozgłoszeniową. Typowym
przykładem takiej komunikacji jest transmisja radiowa i telewizyjna.
Jeden punkt nadaje a pozostałe odbierają. Dla sieci CAN zdefiniowano
warstwy: 1 (fizyczna) i 2 (łączenia danych) modelu OSI. Warstwa łą-
czenia danych odpowiada m. in. za filtrację wiadomości, opakowywa-
nie danych, kodowanie ramki, sygnalizację błędów i dostęp do medium
metodą CSMA/CD/NDA. Dużą zaletą standardu CAN jest wysoka od-
porność na zakłócenia. Do łączenia sieci wykorzystywane są specjal-
nie zaprojektowane zestawy układów: przekaźnik i kontroler CAN. Nie-
które kontrolery CAN są zintegrowane z procesorami. Przekaźniki
CAN produkuje wiele firm m. in. Bosh, Philips, Infineon.
Wybór
Wybór
Wybór
Akceptacja
Przygotowanie
Magistrala CAN
Stacja 1
Stacja 2
Stacja 3
Stacja 4
Rys 7.14:
Zasada przesyłania danych w magistrali typu CAN, gdy stacja 2 wysyła dane do
stacji 1. [Frank Blasinger, Manfred Schleicher, Digital Interfaces and Bus Systems
for Communication]
108

Systemy i funkcje mechatroniczne - Podręcznik
Minos
109
7.5.3
DeviceNet
Rozwiązanie DeviceNet firmy Allen-Bradley wprowadzone zostało na
rynek w 1994r. DeviceNet jest siecią opartą na protokole komunikacyj-
nym sieci CAN. Jest systemem otwartym, w którym wszystkie stacje
mają te same prawa dostępu do medium komunikacyjnego. Dostęp do
medium transmisyjnego ma charakter rywalizacyjny (CSMA/CR). Pra-
cuje w oparciu o model producent / konsument. Wymiany informacji w
sieci realizowane są metodą rozgłoszeniową (broadcast). W przypad-
ku sieci DeviceNet oznacza to, że wszystkie stacje odbierają wszystkie
transmitowane siecią dane, a stosując lokalną filtrację, reagują tylko na
wybrane dane. Projektant stacji może zaimplementować przekazywa-
nie kontroli do wstępnie definiowanej stacji Master- Slave, ale brak jest
mechanizmów zmuszających stację nadającą do takiego podporząd-
kowania się. Sieć ta pracuje z szybkościami transmisji danych :
1.0 Mb/s na odległość do 50m,
500 Kb/s na odległość do 100m,
125 Kb/s na odległość do 500m
Długość medium transmisyjnego zależna jest od konkretnej implemen-
tacji warstwy fizycznej (rodzaju medium). Sieć DeviceNet znalazła za-
stosowanie w aplikacjach przemysłowych do szybkiego przesyłu da-
nych na limitowanym dystansie.
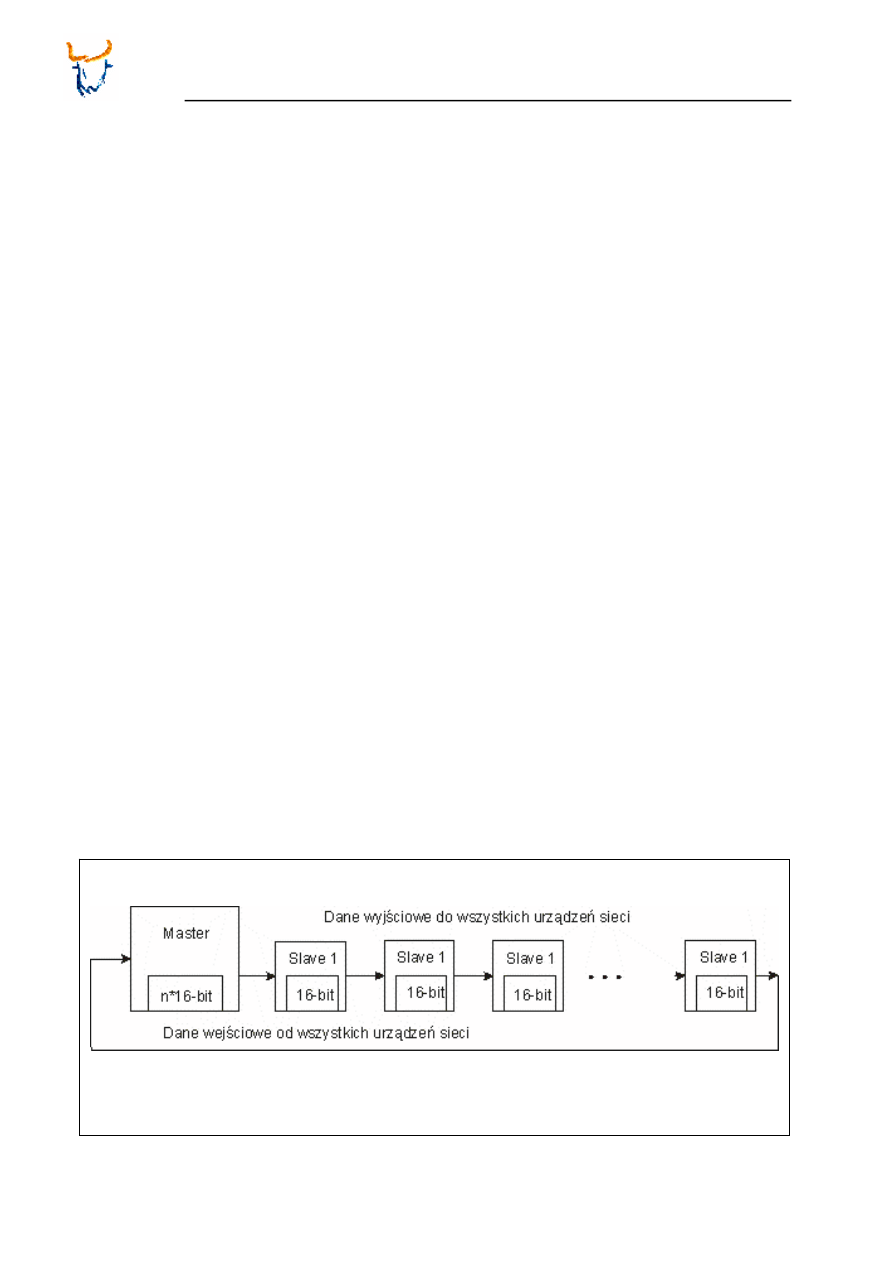
Systemy i funkcje mechatroniczne - Podręcznik
Minos
7.5.4 Fieldbus Interbus-S
Sieć Interbus została opracowana przez niemiecką firmę Phoenix Con-
tact GmbH & Co i ma ona szereg ciekawych rozwiązań. Sieć ta wyko-
rzystuje topologię pierścienia, ale linie danych w obu kierunkach, do-
chodzące do wszystkich urządzeń, są zawarte w jednym wspólnym
kablu, przez co struktura sieci przyjmuje postać drzewa. Do głównej
sieci można dołączać aż 16 poziomów podsieci. Opracowano dla tej
sieci Interbus Loop służącą do komunikacji elementów najniższego
poziomu i pozwalającą na użycie jednego kabla do wymiany danych
oraz do zasilania czujników i elementów wykonawczych. Interbus jest
siecią typu master-slave i pozwala na podłączenie do 512 urządzeń w
16 poziomach podsieci. Każdy węzeł sieci (oprócz Interbus Loop) pełni
również rolę repetera (wzmacniaka) czyli wzmacnia sygnał przed
przesłaniem go do kolejnego węzła. Dzięki temu można uzyskać pręd-
kość transmisji 500 kbit/s, przy maksymalnej odległości 400 m pomię-
dzy węzłami oraz łączną długość sieci do 13 km. Adresy węzłów sieci
są związane z ich fizyczną lokalizacją, przez co włączenie lub wyłą-
czenie urządzenia z sieci nie wymaga przeadresowania istniejących
urządzeń. Dane systemowe są automatycznie przypisywane nowemu
urządzeniu na podstawie jego miejsca w sieci, co przypomina mecha-
nizm plug and play. Interbus jest systemem deterministycznym, dzięki
metodzie dostępu do medium, podobnej do wymiany tokena zwanej
metodą z sumowaniem ramki. Wszystkie węzły tworzą rejestr prze-
suwny. Każde urządzenie posiada co najmniej jedną komórkę pamięci.
Wymiana danych wejściowych i wyjściowych urządzenia odbywa się
równocześnie (full duplex), na zasadzie przesłania danych z komórki
jednego urządzenia do komórki następnego urządzenia i w miejsce
wysłanej informacji - przyjęcia informacji od poprzedniego urządzenia
w sieci. Węzły master pełnią rolę pośrednika podsieci z siecią wyższe-
go poziomu oraz odpytują urządzenia tej samej podsieci. Interbus wy-
korzystuje warstwy 1, 2 i 7 modelu OSI, przy czym nie wszystkie urzą-
dzenia muszą posiadać warstwę aplikacji. W przypadku najprostszych
czujników nie jest ona konieczna. Z powodu dużej szybkości przesyłu
danych oraz determinizmu, sieć ta znalazła zastosowanie w wielu in-
stalacjach wymagających dotrzymania warunków czasu rzeczywiste-
go.
Rys 7.15:
Przepływ danych w Interbus-S
110
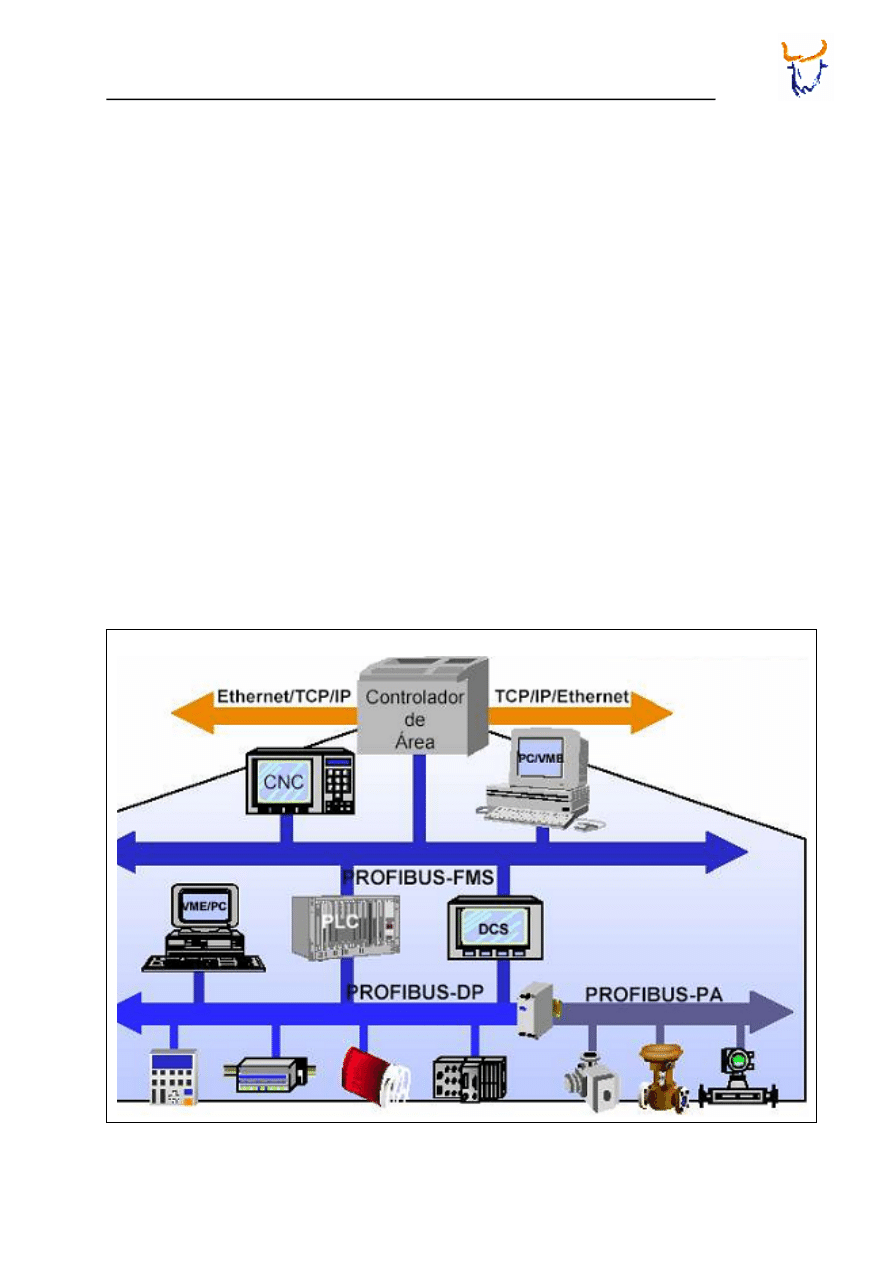
Systemy i funkcje mechatroniczne - Podręcznik
Minos
7.5.5
Sieć typu Profibus Field bus Professional Bus (-DP, -FMS)
Standard Profibus (Process Field Bus) opracowano w latach 1987-90
w Niemczech przy współpracy uniwersytetów i przedsiębiorstw pry-
watnych. Od tego czasu sieć ta znalazła powszechne zastosowanie w
automatyzacji fabryk i procesów na całym świecie (produkcja papieru -
Australia, kopalnia miedzi - RPA, produkcja lodów - Chiny, montaż
pomp firmy Grundfos - Dania, produkcja samochodów Opel - Niemcy).
Profibus jest siecią typu Multi Master z wymianą tokena, co znaczy, że
wymiana danych może następować tylko z inicjatywy węzła master,
który aktualnie posiada token. Obecnie Profibus oferuje profile komu-
nikacyjne DP i FMS, profile fizyczne RS-485, IEC 1158-2, transmisję
światłowodową, jak również profile aplikacyjne dla konkretnych dzie-
dzin. Najczęściej wykorzystywanym profilem komunikacyjnym jest Pro-
fibus DP, który jest zoptymalizowany pod kątem prędkości przesyłu,
efektywności i obniżenia kosztów w systemach automatyki. Protokół
Profibus DP wykorzystuje dwie najniższe warstwy modelu OSI. Profi-
bus FMS jest uniwersalnym profilem komunikacyjnym, wolniejszym od
DP, ale posiadającym szereg funkcji do komunikacji inteligentnych
urządzeń. Funkcje komunikacyjne są zdefiniowane w warstwie siódmej
(warstwie aplikacji) modelu OSI. Oprócz tej warstwy występują jedynie
warstwy 1 i 2. Profibus FMS był przewidziany dla wyższych poziomów
systemu informatycznego przedsiębiorstwa. Obecnie trwają prace nad
integracją sieci Profibus z siecią Ethernet, przez co rola profilu FMS
będzie z czasem maleć.
Rys 7.16:
Struktura systemu komunikacji sieci Profibus [Profibus PNO Polska]
111

Systemy i funkcje mechatroniczne - Podręcznik
Minos
112
W sieci Profibus najczęściej wykorzystywaną technologią transmisji
(profilem fizycznym) jest standard RS-485 oraz skrętka jako nośnik
danych. Możliwe w tym przypadku prędkości to 9600 bit/s do 12
Mbit/s, przy maksymalnie 32 węzłach w segmencie sieci o topologii
magistralowej. Inna technologia transmisji, opisana normą IEC 1158-2,
jest wykorzystywana w automatyzacji procesów niebezpiecznych,,
gdzie istnieje zagrożenie wybuchem. Wszystkie urządzenia komuniku-
ją się z prędkością 31,25 kbit/s przy pomocy skrętki ekranowanej, któ-
rą dostarczane jest również zasilanie. Dozwolone są topologie: magi-
stralowa, drzewo lub gwiazda. Ta odmiana sieci Profibus jest iskro-
bezpieczna. Znalazła ona zastosowanie w przemyśle chemicznym i
petrochemicznym, np. największa w Niemczech rafineria oleju firmy
Shell. Istnieją sprzętowe i programowe realizacje protokołu Profibus.
W zastosowaniach czasu rzeczywistego urządzenia wykorzystujące
programową realizację protokołu Profibus mają ograniczoną przydat-
ność.
Minęło już kilkanaście lat od daty powstania założeń sieci Profibus i
wprowadzenia jej w życie. Organizacja skupiająca użytkowników sieci
Profibus PNO przyjęła już około 1000 nowych członków w prawie 20
krajach na całym świecie. W różnych gałęziach przemysłu wprowa-
dzono przeszło 3 miliony urządzeń pracujących w sieci Profibus, w po-
nad 300 tysiącach aplikacji. Wszystko to sprawia, że sieć przemysłowa
PROFIBUS staje się czołową i wiodącą siecią przemysłową, przede
wszystkim w Europie, jak również na innych kontynentach. W ostatnim
czasie sieć Profibus stała się siecią o zasięgu globalnym, zyskując
normalizację światową IEC 1158.
Sieć Profibus została podzielona, jak już wspomniano wcześniej, na
kilka standardów, a mianowicie Profibus FMS, FDL, DP oraz PA. Po-
zwoliło to na pokrycie praktycznie 100% wymagań i oczekiwań, jakie
zostały postawione sieci przez użytkowników.
Standard FMS (podobnie i FDL) w swych założeniach i praktyce służy
do przesyłania większej liczby danych procesowych pomiędzy stacja-
mi, takimi jak sterowniki, stacje operatorskie, programatory, urządzenia
zabezpieczające oraz komputery PC. Opiera się on na strukturze
Client-Server (Token passing), co powoduje, że w jednej sieci może
komunikować się ze sobą większa liczba stacji (struktura multimaster).
Sama konfiguracja i uruchomienie oparta jest na bazie oprogramowa-
nia Step 7, które zawiera wszystkie potrzebne do tego narzędzia oraz
dodatkowo daje możliwość prostej i szybkiej diagnostyki.
Standardy DP oraz PA pełnią nieco inne zadanie niż FMS, czy FDL.
Głównym zadaniem realizowanym w tych standardach jest decentrali-
zacja sterowania, czyli przeniesienie sterowania na niższy poziom,
rozproszenie wejść i wyjść sygnałów analogowych, umieszczenie kart
przetwarzania jak najbliżej obiektu. Struktura sieci oparta jest na idei
stacji głównej, zarządzającej (Master), która zarządza siecią oraz do-
łączonym do niej stacjom podrzędnym (Slave). Stacją Master najczę-
ściej jest sterownik lub stacja operatorska PC, stacje natomiast typu
Slave tworzy bogata gama różnych produktów i układów, do których
należą przede wszystkim: karty wejść / wyjść dwustanowych, analo-
gowych, napędy, siłowniki, falowniki, zabezpieczenia silników, panele
operatorskie, przetworniki, moduły wagowe, inteligentne stacje ste-

Systemy i funkcje mechatroniczne - Podręcznik
Minos
113
rownikowe, komputery, itp. Podobnie jak dla standardów FMS, FDL
narzędziem bazowym do uruchomienia całej sieci jest oprogramowa-
nie Step 7 Firmy Siemens.
O popularności sieci Profibus zdecydowało kilka czynników. Przede
wszystkim obniżenie kosztów okablowania, łatwość wyboru i standary-
zacja produktów, prosta i szybka instalacja, krótki czas uruchomienia i
rozruchu obiektu, pewność działania i duża wydajność obiektu.
W sieci kolejne stacje połączone są ekranowanym kablem dwużyło-
wym lub światłowodem. Jak pokazuje praktyka oszczędności kosztów
okablowania mogą sięgać nawet kilkudziesięciu procent dzięki zmniej-
szenie ilości kabla obiektowego, listew zaciskowych i przyłączy, liczby
szaf i miejsca w szafach, a przede wszystkim czasu montażu i instala-
cji.
Ponadto stosowanie sieci pozwala na skuteczne zabezpieczenie przed
zakłóceniami (szczególnie elektromagnetycznymi), np. poprzez stoso-
wanie światłowodów, a w przypadku sygnałów analogowych (np. w
przypadku wag) pozwala na pewny i bezpieczny odczyt wartości mie-
rzonej. Zapewnia to również na znaczne zmniejszenie czasu montażu
i uruchomienia całego obiektu. Daje ponadto możliwość szybkiej fi-
zycznej diagnostyki i usuwania błędów montażowych. Dostępne są
specjalne testery, które dokładnie wskazują na miejsce awarii. Opro-
gramowanie Step 7, które stanowi bazę do konfiguracji całej sieci, za-
wiera proste, ale bardzo wydajne funkcje, które wskazują i opisują
miejsce oraz przyczynę awarii (np. brak zasilania modułu, przerwania
przewodu sygnałowego PT100, itp.).
Sama konfiguracja sieci jest nadzwyczaj prosta i przejrzysta. Przyjęta
zasada podobnego adresowania, zarówno dla struktury zcentralizowa-
nej, jak i rozproszonej powoduje, że programista praktycznie nie widzi
różnicy w pisaniu i uruchamianiu programu.
Dla prostej i szybkiej diagnostyki oraz uproszczeniu procesu urucha-
miania programu stworzono możliwość pracy i wprowadzania zmian w
programie z dowolnego miejsca sieci. Daje to duże możliwości szyb-
kiego i pewnego uruchomienia oraz bezpośredniego kontaktu z obiek-
tem. W celach serwisowych stworzono również inną możliwość dia-
gnostyki i kontroli obiektu, a mianowicie poprzez sieć telefoniczną i
zwykłe modemy, praktycznie z dowolnego miejsca na świecie. Istnieje
możliwość dostępu pośredniego do drugiej równoległej sieci (routing),,
co daje nam w praktyce możliwość pracy bez przełączania się pomię-
dzy sieciami (np. Ethernet, Profibus, MPI), czyli dostęp do całego pro-
cesu.
Warto również podkreślić efektywność działania, czy wydajność sieci
Profibus. Transmisja danych odbywa się szeregowo z wykorzystaniem
kabla ekranowanego dwużyłowego, czy światłowodu w standardzie
elektrycznym RS485. Prędkość maksymalna działania sieci na dzień
dzisiejszy wynosi 12 MBit/s, co pozwala na osiągnięcie czasu reakcji
sieci rzędu pojedynczych ms, a w większości przypadków pozwala na
praktyczne pominięcie czasu cyklu sieci, w stosunku do innych czasów
procesu (np. czas cyklu programu, reakcja układów wejścia/wyjścia.

Systemy i funkcje mechatroniczne - Podręcznik
Minos
114
Sieć Profibus jest to coś więcej niż zwykła transmisja danych. Daje
ona możliwość pełnej lokalnej oraz zdalnej diagnostyki, programowa-
nia i uruchamiania sieci. Pozwala też na dostęp do innych, pracują-
cych równolegle sieci i udostępnia gama składników-produktów, które
praktycznie pokrywają całe zapotrzebowanie zadań przemysłowych.
Bardzo efektywna i wydajna jest praca, a co najważniejsze pewność i
szybkość działania sieci. Oszczędności kabla i czasu uruchamiania są
również duże. Wszystko to sprawia, że sieć Profibus jest jedną z naj-
bardziej popularnych sieci w automatyce, praktycznie we wszystkich
dziedzinach zapotrzebowania przemysłu.
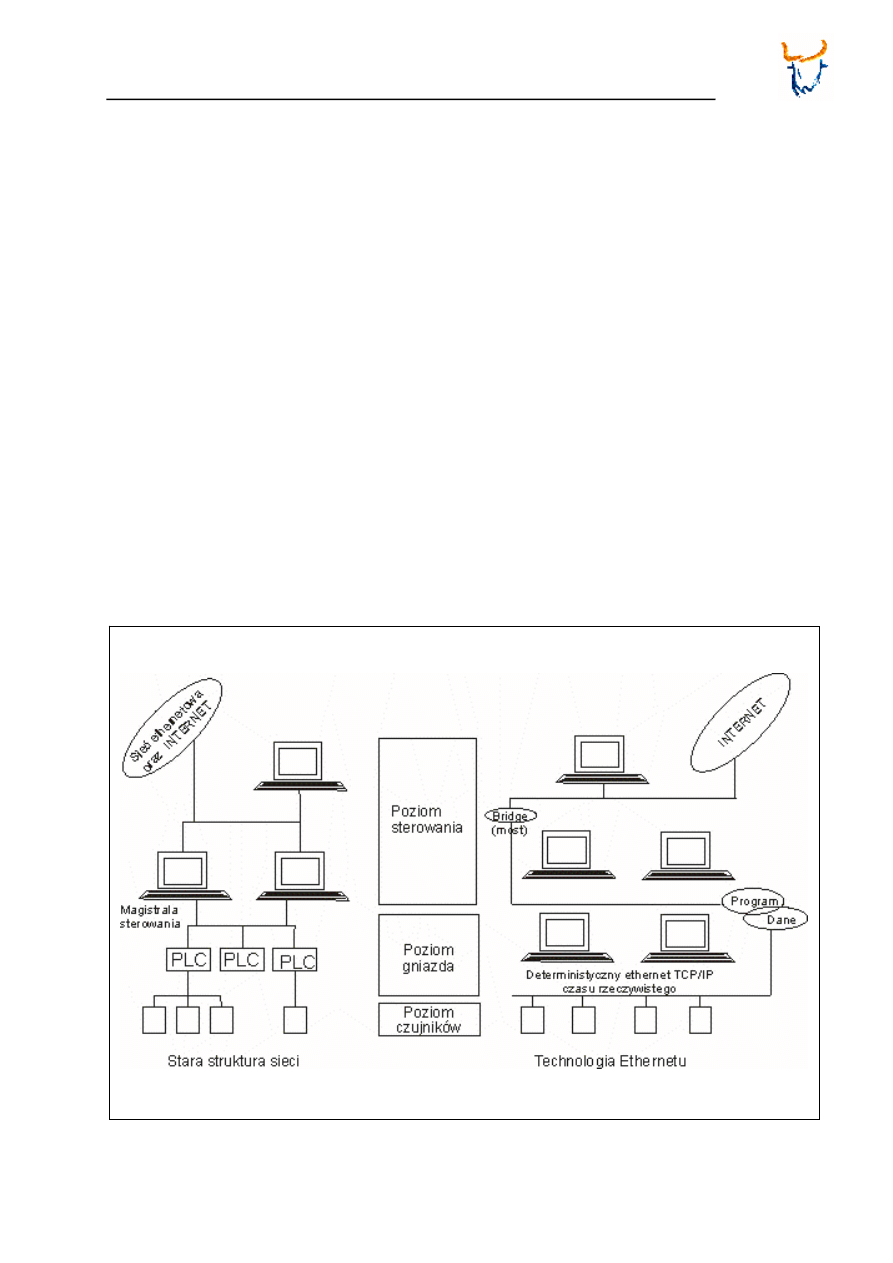
Systemy i funkcje mechatroniczne - Podręcznik
Minos
7.6
Ethernet jako uniwersalna sieć łącząca pozostałe standardy sieci przemysło-
wych
Istotną potrzebą zakładów przemysłowych jest posiadanie jednolitej
platformy wymiany danych pomiędzy poszczególnymi systemami, za-
równo informatycznymi, jak i automatyki przemysłowej. Przy szybkości
przesyłowej rzędu 100 Mb/s oraz przy nowoczesnych inteligentnych
przełącznikach (switches), dotychczasowe wady Ethernetu wynikające
z braku możliwości pracy w czasie rzeczywistym przestały mieć prak-
tyczne znaczenie.
Obecnie w rozwiązaniach polowych zaczęto coraz częściej używać
Ethernetu. W porównaniu do struktury sieci standardowych Ethernet
ma takie zalety:
-dużą szybkość transmisji (aktualnie do 100 MB),
-prawie żadne ograniczenia topologii sieci (jej struktury),
- możliwość praktycznie nieograniczonej rozbudowy,
-jest standardem światowym,
-połączenie ze światową siecią, (standard TCP/IP),
-stały rozwój technologii stosowanej w tej sieci.
Przykład zastąpienia przez Ethernet sieci przemysłowej przedstawia
rys.7.17
Rys 7.17:
ieć Ethernet łącząca wszystkie poziomy sieci[Frank Blasinger, Manfred Schleicher,
Digital Interfaces and Bus Systems for Communication]
115

Systemy i funkcje mechatroniczne - Podręcznik
Minos
116
7.7
Ujednolicenie programowe sieci polowych poprzez projekt standardu NOAH
Wadą istniejących sieci polowych jest ich różnorodność spowodowana
brakiem jednolitego standardu sieci polowych. Jest to wynikiem za-
równo dopasowywania do różnorodnych zastosowań jak i indywidual-
nych cech nadawanych przez różnorodnych producentów. Producenci
próbują narzucać swoje własne standardy, nie zawsze zgodne z ocze-
kiwaniami klientów. Sprawia to, że klient zostaje uzależniony od do-
stawcy sprzętu. Rozwiązaniem tych problemów byłoby stworzenie
ogólnego standardu sieci polowej. Prace jednak nad takim rozwiąza-
niem postępują bardzo powoli.
Jednym z działań prowadzących do ujednolicenia programowego sieci
polowych i zapewnienia dobrej współpracy sieci, tzn. . zapewnienia
bezkonfliktowej wymiany danych, zarówno na poziomie fizycznym jak
programowym, jest projekt NOAH (Network Oriented Application Har-
monization). Jego celem jest stworzenie ogólnego interfejsu, który
mógłby być używany do konfigurowania i oceny urządzeń polowych,
zgodnych z normą EN 50 170, wykorzystując w tym celu jedno narzę-
dzie programowe (pojedynczy program).
NOAH jest programem wykorzystującym warstwę aplikacji w modelu
referencyjnym ISO/OSI. Dzięki temu zawsze jest pewność, że ma taki
sam dostęp (ustawianie parametrów, diagnostyka, funkcje sterujące)
do sieci dla każdego rodzaju sieci polowej, na której jest on zainstalo-
wany. Urządzenia automatyki, takie jak sensory, nadajniki, serwona-
pędy silników, proste układy WE/WY, mają zdefiniowane zakresy dzia-
łania, zgodnie z ich funkcjami, do wykonywania których zostały zapro-
jektowane. Poszczególni producenci mogą jednak realizować różnie
zakresy działania poszczególnych urządzeń. W praktyce tylko część
funkcji realizowanych przez układ automatyki może być zestandary-
zowana. Pozostałe funkcje rozszerzające możliwości układu są dołą-
czane do układu w postaci elektronicznej bazy danych. Projekt NOAH
stanowi standard opisu takich dodatkowych funkcji układu. Umożliwi
on opisanie każdego urządzenia (stworzenie jego wirtualnego obrazu)
za pomocą języka DDL (Device Description Language). W praktyce
opis urządzenia (czujnika) jest podzielony na kilka poziomów: poziom
zawierający parametry uniwersalne urządzenia, poziom parametrów
uniwersalnych funkcji , poziom przetwarzania oraz poziom ostatni pa-
rametrów właściwych tylko danemu producentowi urządzenia (poziom
ten zawiera funkcje dodatkowe rozszerzające możliwości układu. Wy-
korzystanie wirtualnego obrazu urządzeń do sterowania ułatwia inte-
grację, upraszcza rozbudowę oraz zapewnia wymienność układów po-
chodzących od różnych producentów. Sterowanie oraz komunikacja
pomiędzy układami odbywa się przy wykorzystaniu tablic opisujących
właściwości poszczególnych czujników.
Wynikiem prac nad ujednoliceniem sieci polowych jest powstanie eu-
ropejskiego Standardu EN 50 170. Standard ten obejmuje sieci polowe
stosowane w Europie. Przy wykorzystaniu NOAH umożliwia on nie-
ograniczoną integrację urządzeń sieci polowych. Rys. 7.19 przedsta-
wia koncepcję powiązania europejskich sieci polowych poprzez opro-
gramowanie NOAH.
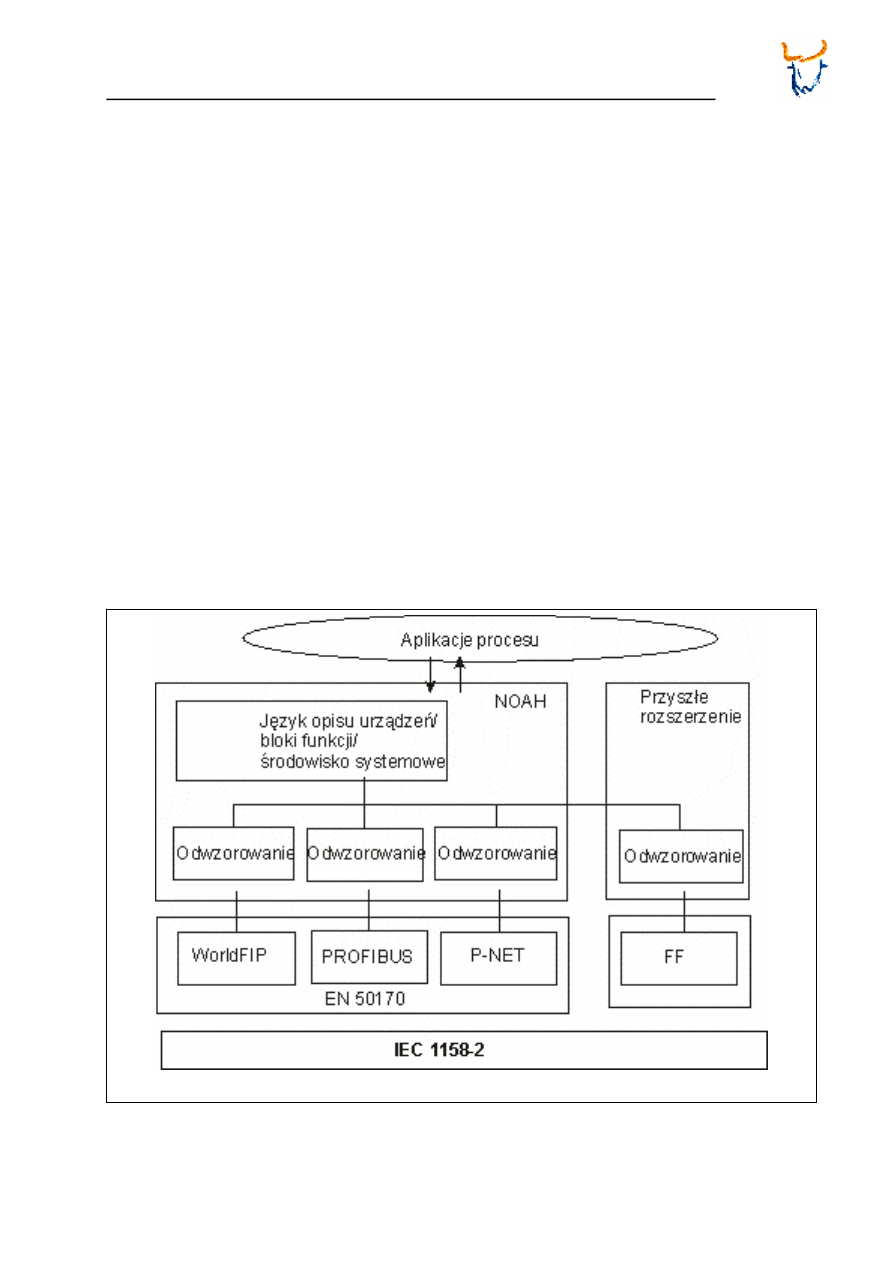
Systemy i funkcje mechatroniczne - Podręcznik
Minos
Rys 7.18:
Koncepcja powiązania europejskich sieci NOAH [Frank Blasinger, Manfred Schlei-
cher, Digital Interfaces and Bus Systems for Communication]
117

Systemy i funkcje mechatroniczne - Podręcznik
Minos
118
Wyszukiwarka
Podobne podstrony:
5 Czujniki Podrecznik PL
logo podręcznik pl AGOWIBW4NQIH5ISZSWRYJ66ZZOXCZMEPY7DWXOY
6 Podrecznik2 PL
7 Podrecznik PL
8 Podrecznik PL
2 1Sozial podrecznik PL
APQP Podręcznik PL APQP 2
2 2Projet podrecznik PL
5 Czujniki Podrecznik PL
logo podręcznik pl AGOWIBW4NQIH5ISZSWRYJ66ZZOXCZMEPY7DWXOY
PODRĘCZNIK UŻYTKOWNIKA PL
PC 1200 Podręcznik Wzorcowy 3D PL
więcej podobnych podstron