Do wykładu № 2
Zasady dynamiki Newtona. Pierwsza zasada dynamiki Newtona i inercjalne układy odniesienia. Siła, masa, pęd. Druga i trzecia zasada Newtona. Rodzaje sił w przyrodzie.
Wykłady realizowany są w ramach projektu pt. „Mechatronika kierunkiem przyszłości - dostosowanie oferty edukacyjnej Uniwersytetu Kazimierza Wielkiego do potrzeb rynku pracy”, Działanie 4.1.1, Programu Operacyjnego Kapitał Ludzki, współfinansowanego ze środków Europejskiego Funduszu Społecznego”.
Resnik R., Holliday D. Fizyka. - Warszawa: WN PWN, 1998. W 2 t.
Feynman R.P., Leighton R.B., Sands M. Feynmana wykłady z fizyki. - Warszawa: PWN, 1971. - W 5 t.
Bobrowski C. Fizyka - krótki kurs. - Warszawa: WNT, 2007.
Układ odniesienia. Jednym z podstawowych spostrzeżeń przy badaniu ruchu ciała jest konstatacja jego względności. Oznacza to, że o ruchu ciała możemy mówić tylko, określając ciało odniesienia - ciało względem, którego analizujemy ruch.
Układem odniesienia nazywamy układ współrzędnych, który w jednoznaczny sposób związany z ciałem odniesienia, oraz zaopatrzony o sposób pomiaru czasu.
Ruchem nazywamy zmianę położenia ciała w przestrzeni względem wybranego układu odniesienia.
Rozróżniamy ruch postępowy i obrotowy.
Mówimy o ruchu postępowym jeśli wszystkie punkty ciała poruszają się po takich samych torach (geometrycznie podobnych).
W ruchu obrotowym tory poszczególnych punktów są okręgami współśrodkowymi.
Punktem materialnym nazywamy ciało obdarzone masą, rozmiaru którego można zaniedbać w pewnych zagadnieniach fizycznych.
Ruch prostoliniowy.
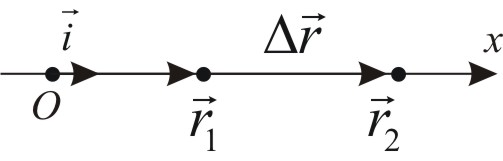
Ruchem prostoliniowym nazywamy ruch punktu materialnego po torze prostym. W tym przypadku możemy skorzystać z jednowymiarowego układu odniesienia. Ruch ciała opisuje zależność funkcyjna
![]()
,
gdzie ![]()
— czas.
Określimy prędkość średnią wzorem
![]()
,
gdzie ![]()
i ![]()
— wektory wodzący punktu materialnego w chwili czasu ![]()
i ![]()
, odpowiednio, oraz ![]()
— wektor przemieszczenia punktu materialnego i ![]()
.
Ponieważ, w danym przypadku prędkość średnia i wektor wodzący mogą być zapisane w postaci ![]()
i ![]()
, gdzie ![]()
i ![]()
— współrzędne, to również mamy
![]()
, ![]()
,
gdzie ![]()
i ![]()
— odległości od punktu ![]()
do punktu materialnego w chwili czasu ![]()
i ![]()
, odpowiednio, oraz ![]()
— długość wektora przemieszczenia ![]()
.
Z powyższych wzorów otrzymamy
![]()
: ![]()
lub z wykorzystaniem współrzędnej
![]()
: ![]()
.
Prędkością chwilową nazywamy granicę
![]()
lub ![]()
.
W przypadku ogólnym prędkość średnia zależę od wyboru chwil czasu ![]()
i ![]()
, a prędkość chwilowa od czasu ![]()
.
Jeśli prędkość ciała zależę od czasu, to ruch nazywamy zmiennym.
Przyspieszeniem średnim nazywamy iloraz różnicowy prędkości i czasu
![]()
,
gdzie ![]()
i ![]()
— prędkości punktu materialnego w chwili czasu ![]()
i ![]()
, odpowiednio, oraz ![]()
— zmiana prędkości w ciągu czasu ![]()
.
Przyspieszeniem chwilowym nazywamy granicę
![]()
.
Podobnie dla określonych wielkości zapisujemy z wykorzystaniem współrzędnej
![]()
oraz ![]()
.
Zaznaczmy, że
lub 
.
Z powyższych wzorów znajdziemy
![]()
lub z wykorzystaniem współrzędnej
![]()
.
Ruch jest prostoliniowym jednostajnym, jeśli za równe przedziały czasu ![]()
, odliczane od dowolnej chwili, punkt materialny dokonuje jednakowych przemieszczeń ![]()
. Wtedy ![]()
, ![]()
i jeżeli ![]()
: ![]()
; ![]()
: ![]()
, to droga ![]()
pokonana przez ciało będę
![]()
,
oraz położenie na osi ![]()
![]()
.
Graficzna ilustracja ruchu jednostajnego jest następująca.
Zaznaczmy, że
![]()
,
gdzie ![]()
jest kątem pokazanym na rysunku.
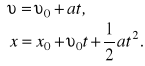
Ruch, w którym przyspieszenie jest stałe nazywamy ruchem jednostajnie zmiennym (przy ![]()
— jednostajnie przyspieszonym, ![]()
— jednostajnie opóźnionym). Oznaczając ![]()
, a także przyjmując ![]()
: ![]()
, ![]()
; ![]()
: ![]()
, ![]()
, z powyższych wzorów dla ruchu jednostajnego znajdziemy
![]()
: ![]()
;
![]()
: ![]()
.
Ponieważ w ruchu jednostajnym
![]()
,
to ostatecznie otrzymamy
Eliminując czas otrzymamy korzystną w zastosowaniach zależność
![]()
.
Graficzna ilustracja ruchu prostoliniowego jednostajnie zmiennego jest następująca.
Ruch krzywoliniowy w przestrzeni trójwymiarowej.
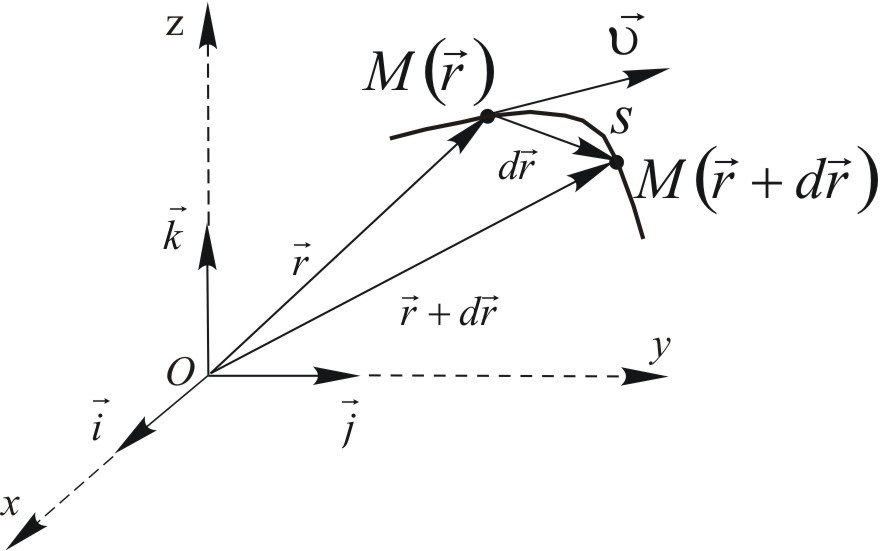
Jak i wcześniej, definicji prawa ruchu, prędkość i przyspieszenie są następujące
![]()
,
![]()
,
![]()
oraz ![]()
.
Zapis przez współrzędne jest następujący. Ponieważ
![]()
, ![]()
, ![]()
,
to prawo ruchu określają trzy skalarne zależności
![]()
;
dla składowych prędkości mamy
![]()
;
oraz dla składowych przyspieszenia
![]()
.
Rzut ukośny.
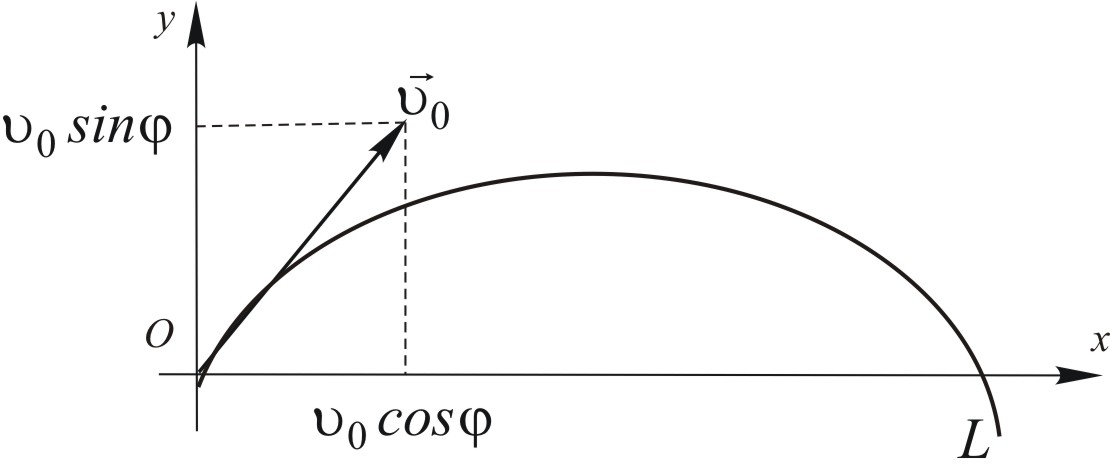
Ciało pozostało wyrzucone z prędkością ![]()
tworzącą kąt ![]()
z poziomem. Wybierzmy układ współrzędnych tak, jak pokazano na rysunku.
W kierunku osi ![]()
ciało porusza się ze stałą prędkością ![]()
, zaś w kierunku osi ![]()
dokonuje ruchu jednostajnie zmiennego (jednostajnie opóźnionego) z wiadomym przyspieszeniem ![]()
i prędkością początkową ![]()
.
Więc współrzędne ciała w dowolnej chwili czasu będą
Dla znalezienia toru ruchu ciała eliminujemy czas. Z pierwszego równania
![]()
.
Podstawiamy w drugie równanie
.
Po uproszczeniach otrzymamy
![]()
.
Jest to równanie paraboli
![]()
o parametrach
![]()
, ![]()
, ![]()
.
Punkt spadania na powierzchnie poziomą określa się z warunku
gdzie ![]()
— czas przelotu, ![]()
— odległość. Z pierwszego równania
![]()
.
Podstawiając w drugie
,
otrzymamy
.
Skąd
![]()
i ![]()
.
Dalej
![]()
i ![]()
lub
![]()
i 
i ostatecznie
![]()
i 
.
Pierwsze rozwiązanie ![]()
odpowiada punktu ![]()
. Drugie rozwiązanie daje możliwość znalezienia kąta ![]()
, przy którym odległość ![]()
będzie maksymalną. Notujemy
.
Funkcja ![]()
osiąga wartość maksymalną jeden przy ![]()
. Więc ![]()
.
Ruch po okręgu.
Ciało z prędkością ![]()
porusza się po okręgu o promieniu ![]()
. Zgodnie z definicją kąta w radianach
![]()
,
mamy
![]()
,
gdzie ![]()
i ![]()
— kąt i długość łuku zakreślonego w ciągu małego przedziału czasu ![]()
.
Dzielimy dwustronnie przez ![]()
![]()
i kierujemy przedział czasowy ![]()
do zera. Ponieważ ![]()
, to uwzględniając definicję
![]()
i ![]()
,
otrzymamy
![]()
,
gdzie ![]()
— prędkość kątowa.
Prędkość kątowa definiuje się jak wektor prostopadły do płaszczyzny okręgu tak, żeby z jego końca ruch po okręgu był przeciwny do ruchu strzałek zwykłego zegarka, a jego długość oznacza się powyższą granicą.
Okresem ruchu nazywamy czas pełnego obiegu ![]()
punktu materialnego po okręgu. Z definicji prędkości kątowej ![]()
, przy ![]()
, mamy ![]()
. Wówczas
![]()
.
Częstotliwością nazywamy wielkość fizyczną określoną ilorazem
![]()
.
Przyspieszenie kątowe określamy przez wzór
![]()
lub w postaci skalarnej
![]()
.
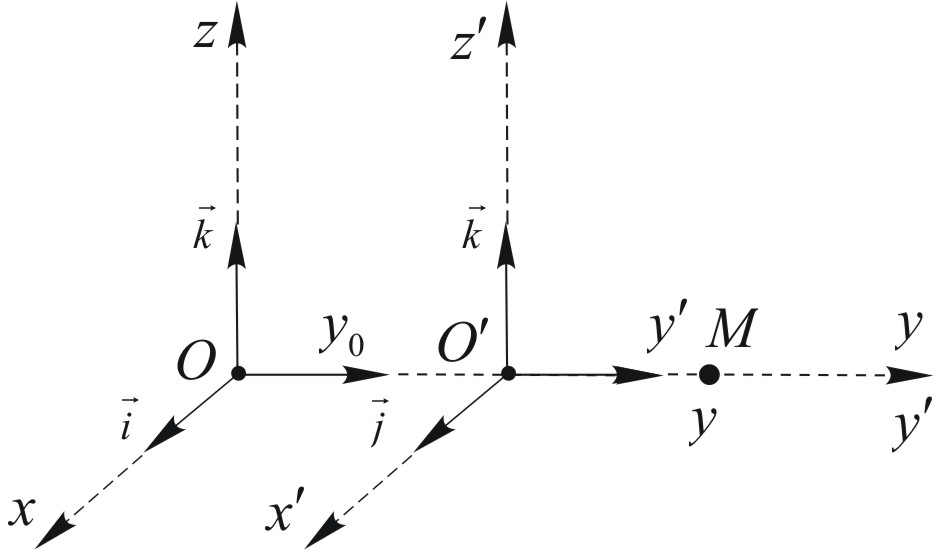
Połączymy otrzymane definicji. Ponieważ

gdzie ![]()
i ![]()
. Różniczkując otrzymamy
lub, ponieważ ![]()
i ![]()
, to
lub, ponieważ ![]()
, to
Różniczkując dalej otrzymane wyrażenia, zapisujemy
Korzystając z definicji przyspieszenia i rozpisując pochodne od iloczynu funkcji, mamy
lub, ponieważ ![]()
, to
lub, uwzględniając, że ![]()
, zapisujemy
lub
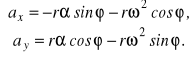
Korzystając z poprzednich wzorów dla składowych prędkości i współrzędnych punktu, mamy
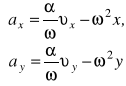
lub w postaci wektorowej
![]()
.
Pierwszy składnik
![]()
nazywamy przyspieszeniem stycznym, dla modułu którego mamy
![]()
.
Wówczas drugi składnik
![]()
nazywamy przyspieszeniem normalnym, dla modułu którego mamy
![]()
.
Prawa Newtona (1687 r.)
Pierwsze prawo:
istnieją układy odniesienia, zwane inercjalnymi, względem których sprawiedliwe jest twierdzenie — punkt materialny zachowuje stan spoczynku lub prostoliniowego jednostajnego ruchu ze stałą prędkością, jeśli na niego nie działają inne ciała lub ich działanie wzajemnie jest zrównoważone;
jeżeli istnieje chociażby jeden układ inercjalny, to ich istnieje nieskończenie wiele, i są to układu poruszające się wzajemnie ze stałą prędkością.
Drugie prawo
W wyniku oddziaływań punkt materialny zmienia swoją prędkość. Przyspieszenie wprost proporcjonalne działającej sile wypadkowej
![]()
, ![]()
.
Współczynnik proporcjonalności jest odwrotność masy punktu i drugie prawo Newton'a zapisuje się w postaci
![]()
.
Pęd punktu materialnego określamy wzorem
![]()
.
Drugie prawo Newton'a zapiszemy w postaci
![]()
i przyjmując ![]()
otrzymamy
![]()
lub
![]()
.
Jest to postać końcowa drugiego prawa dynamiki sformułowanego jeszcze przez Newton'a. W jakości wielkości zmiennych mogą występować masa ![]()
i prędkość ![]()
.
Trzecie prawo.
Wzajemne oddziaływania ciał wyglądają następująco
![]()
.
Siły w mechanice.
Ciężar
![]()
.
Siła sprężysta (prawo Hooke'a)
Tradycyjnie prawo Hooke'a zapisujemy w postaci

,
gdzie ![]()
— wydłużenie, ![]()
— stała Younga, ![]()
— pole przekroju pręta.
Stosując trzecią zasadę Newton'a
(akcja) ![]()
(reakcja)
i zmieniając układ odniesienia otrzymamy
![]()
,
gdzie ![]()
— współczynnik proporcjonalności, ![]()
— wektor wodzący punktu wychylenia od położenia równowagi.
Siła tarcia.
Siła tarcia zawsze jest skierowana przeciwko aktualnemu kierunku ruchu ciała, tzn. wektora prędkości ![]()
.
W przypadku ruchu ciała stałego po powierzchni innego ciała stałego (podstawy) mamy
![]()
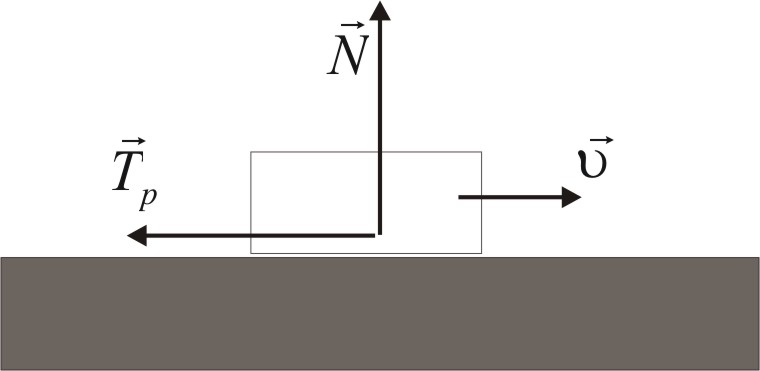
, ![]()
,
gdzie ![]()
— siła tarcia, ![]()
— reakcja podstawy (siła normalna do powierzchni kontaktu, działająca na ciało).
Jest to tarcie poślizgowe.
Siła oporu przy ruchu w powietrzu.
Fragmenty analizy wymiarowej. Z obserwacji ustalonego ruchu spadających ciał kulistych w atmosferze stwierdzono, że siła oporu ośrodka ![]()
jest zależna od jego gęstości ![]()
, pola powierzchni przekroju ciała ![]()
, a także prędkości ![]()
, tzn. ![]()
. Znaleźć postać niewiadomej zależności funkcyjnej.
Załóżmy, że
![]()
,
gdzie ![]()
, ![]()
i ![]()
są nieznanymi wykładnikami potęgi, strzałką podwójną ![]()
oznaczono proporcjonalność.
Przeanalizujmy teraz wymiar wielkości po obu stronach proporcjonalności. Ponieważ ![]()
, ![]()
, ![]()
i ![]()
, to warunek jednakowego wymiaru zależności fizycznych zapiszemy w postaci
![]()
,
lub
![]()
.
Skąd nieznani wykładniki potęgi powinni spełniać warunki
![]()
,
![]()
,
![]()
.
Rozwiązując ten układ równań znajdziemy
![]()
, ![]()
, ![]()
.
Więc dla siły oporu otrzymujemy
![]()
,
lub
![]()
,
gdzie ![]()
jest współczynnikiem proporcjonalności, który znajdujemy z wyników eksperymentu.
Siła dośrodkowa ![]()
i odśrodkowa ![]()
.
![]()
, ![]()
Siły bezwładności
![]()
,
![]()
![]()
lub
![]()
![]()
![]()
.
Siła bezwładności (siła pozorna)
![]()
i ostatecznie
![]()
.
Siła Coriolisa
![]()
.
Wyszukiwarka
Podobne podstrony:
Fizyka W 6 B, Fizyka wykłady i zagadnienia Czapla
Pyt Ekz Fiz, Fizyka wykłady i zagadnienia Czapla
Zagad Fiz, Fizyka wykłady i zagadnienia Czapla
Fizyka W 1, Fizyka wykłady i zagadnienia Czapla
Fizyka W 9, Fizyka, FIZYKA, Fizyka wykłady i zagadnienia Czapla, Elektrodynamika
Fizyka W 10b, Fizyka, FIZYKA, Fizyka wykłady i zagadnienia Czapla, Elektrodynamika
Fizyka W 6 A, Fizyka wykłady i zagadnienia Czapla
Fizyka W 3, Fizyka wykłady i zagadnienia Czapla
Fizyka W 10c, Fizyka, FIZYKA, Fizyka wykłady i zagadnienia Czapla, Elektrodynamika
temp krytyczna, TRANSPORT PWR, STUDIA, SEMESTR II, FIZYKA, fizyka-wyklad, zagadnienia opracowane, za
sprawozdanie 33a, fizyka 2 wykład i zagadnienia, 33
Zjawisko dopplera, TRANSPORT PWR, STUDIA, SEMESTR II, FIZYKA, fizyka-wyklad, zagadnienia opracowane,
Sprawko 89, fizyka 2 wykład i zagadnienia, 89
sprawdzanie prawa hooke a wyznaczanie modu u younga 1, fizyka 2 wykład i zagadnienia, sprawozda
Pomiar zależności rezystancji metali i półprzewodników od temperatury, fizyka 2 wykład i zagadnienia
siła i energia, TRANSPORT PWR, STUDIA, SEMESTR II, FIZYKA, fizyka-wyklad, zagadnienia opracowane, za
więcej podobnych podstron