Maszyny asynchroniczne:
Możemy wyróżnić trzy rodzaje pól elektrycznych w maszynach:
Pole stałe -to pole którego oś jest nieruchoma w czasie ( magnes trwały nieruchomy)
Pole przemienne - to takie pole którego oś jest nieruchoma a zwrot zmienia się w czasie ( cewka zasilana prądem przemiennym )
Pole wirujące- oś pola wiruje względem układu odniesienia, zachowany jest stały zwrot względem osi (magnes trwały wirujący)
2.
et-SEM transformacji
![]()
er- SEM rotacji
![]()
![]()
![]()
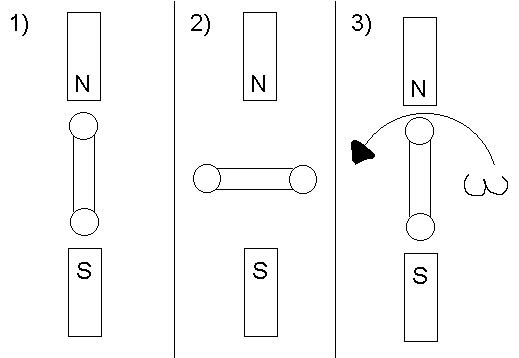
1) φ(t) er=0 et=0 ωc=0 ωp=0
2) φ(t) er=0 et= etMAX ωc=0 ωp=0
3) φ=const. er<>0 et=0 ωc=const. ωp=0
3. SEM indukowana w uzwojeniu fazowym silnika indukcyjnego:
wirujące pole magnetyczne indukowane w uzwojeniach stojana SEM E1. Wartość skuteczna SEM jednej fazy : E1=4,44*f1*z1*ku1*Φ
z1- liczba szeregowo połączonych zwojów uzwojenia stojana
ku1- współczynnik uzwojenia stojana
Φ- amplituda strumienia magnetycznego
4. Budowa maszyn indukcyjnych:
Podstawowymi częściami maszyny asynchronicznej są: stojan(stator) i wirnik (rotor). W zależności od liczby faz maszyna nazywa się jedno lub wielofazową. Ze względu na sposób wykonania uzwojenia wirnika silnik nosi nazwę pierścieniowego lub klatkowego. Bieguny mogą być jawne lub utajone.
5.
PFe=m*RFe*I02Fe
Przy S=1 mamy rozruch, w maszynie płyną duże prądy, największa moc tracona w rdzeniu.
Przy S=Sn mniejsze prądy, mniejsze straty mocy w rdzeniu. (najmniejsze?)
6.
Silnik indukcyjny przekształca energię elektryczną na mechaniczną. Stojan jest 3-fazowy, połączony w gwiazdę, zasilany, wytwarza pole wirujące. Wirnik - 3 fazy, gwiazda, połączony z gwiazdą rezystancji przez pierścienia ślizgowe. Jeżeli zasilimy stojan to w uzwojeniach wirnika indukuje się siła elektromotoryczna:
E20=4,44z2ku2f1φmax
SEM w stojanie:
E1=4,44z1ku1f1φmax
Przy obrocie wirnika wartość SEM nie zmieni się, zmieni się tylko faza. W silniku, w odróżnieniu od transformatora pole porusza się i powstaje SEM rotacji. Przy obrocie w wirniku indukuje się:
E2=4,44z2ku2φmax f2= 4,44z2ku2φmax f1s
Ku - współczynniki uzwojenia,
S - poślizg S= (n1-n)/n1, n1 - prędkość wirowania pola
7.
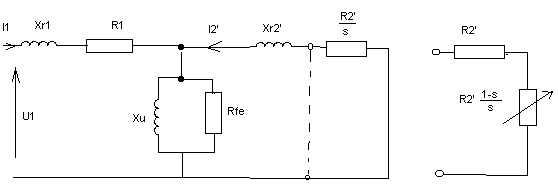
Ten jest po sprowadzeniu strony wtórnej na pierwotną:
R2'=R2*(m1/m2)*ϑ2
Xr2''=Xr2*(m1/m2)
m- liczba faz
8.
9.
Sprawność η stosunek mocy użytecznej do pobranej przez silnik
Od mocy pobranej odejmują się
Straty w stojanie: ΔPCU1=m1R1I12 ; ΔPFe1- straty w rdzeniu stojana
Straty w wirniku: ΔPCU2=m2R2I22 = m1R2'I2'2 ; ΔPFe1- straty w rdzeniu stojana ; ΔPm.- straty mechaniczne - tarcie itp.
P1=U1I1cosφ1 m - liczby faz stron, R - rezystancje uzwojeń
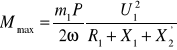
10.
Któraś z tych (najprawdop. Ta druga)
Indeks u - prędkość, moment utyku
Indeks n - nominalne
11.
Moc mechaniczna zależy od momentu T i prędkości kątowej wirnika ωm=Πn/30
Pm=Tωm
ωm=ω1m(1-s)
Pm=Tω1m(1-s)
Związek między momentem i mocą pola wirującego:
T=c1Pψn1
Dla n1=const
T=cPψ
12.
Klatkowe:
włączanie bezpośrednio do sieci - małe moce
przełącznik trójkąt - gwiazda,
autotransformator - duże moce (kilkaset kW - MW),
dodatkowa impedancja włączona szeregowo w fazę,
rozruch częstotliwościowy - falownik,
Pierścieniowe:
dołączenie R w uzwojenia wirnika
głębokożłobkowe
z wykorzystaniem zjawiska naskórkowości
13.
Osie:
Pion - moment T
Poziom - n - prędkość obrotowa
14. Dopuszczalna wartość prądu początkowego IP ustala się ze względu na dopuszczalne spadki napięcia w sieci niskiego napięcia zasilającej także inne odbiorniki a w silnikach pierścieniowych także ze względu na podatny na uszkodzenia węzeł szczotka - pierścień ślizgowy. Dlatego w silnikach pierścieniowych rezystancję Rd trzeba dobrać tak ,aby IP ≤ 2,5Iμ zgodnie z konwencją przy pracy silnikowej moc na wale P = ωM
Me = Mh + Md + MJ Mh - moment hamujący Md - m. tarcia MJ - m.dynamiczny
moment rozruchowy 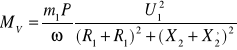
Dopuszczalna wartość prądu
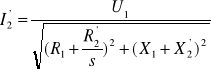
s - współczynnik uzwojeń stojana
przy rozruchu bardzzo duże prądy ![]()
15. Zgodnie z definicją poślizfu prędkość obrotowa maszyny indukcyjnej n=(1-s)n1
a po podstawieniu f=pn1 n=(1-s)f/p
Wynika stąd, że regulację prędkości obrotowej silnika indukcyjnego można uzyskać przez zmianę poślizgu s, zmianę częstotliwości f i zmianę liczby par biegunów.
Zmianę liczby par biegunów stosuje się tylko w silnikach klatkowych, ponieważ zmiana l.p.b. w silniku pierścieniowym wymagałaby także zmiany liczby par biegunów w uzwojeniu wirnika
Regulacja prędkości przez zmianę częstotliwości - przez zmniejszenie częstotliwości napięcia zasilającego uzyskuje się przesuwanie charakterystyki silnika n=f(M)
Regulacja przez zmianę poślizgu może być uzyskana dwoma sposobani. Przez zmianę wartości napięcia doprowadzonego do stojana i przez zmianę rezystancji w obwodzie wirnika co jest równoważne ze zmianą napięcia doprowadzonego do wirnika
16. stosuje się je zazwyczaj w gospodarstwach domowych. Moc ich nie przekracza 2kW. Budowa: stojan blachowy, uzwojenie rozłożone w żłobkach, wirnik klatkowy. Do rozruchu maszyny 1-fazowej jest potrzebne specjalne uzwojenie przesunięte w fazie
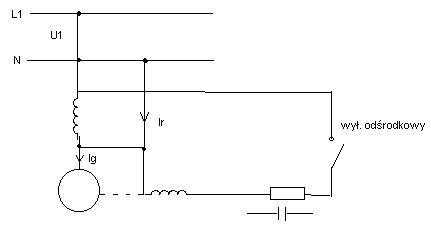
Gdy silnik stoi wył. Odśrodkowy jest zwarty. Przy prędkości obrotowej n=(0,8-0,9) nn wył jest rozwarty
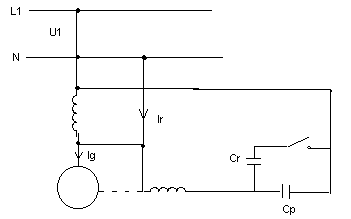
Stosuje się również układy hybrydowe zawierające kondensator do rozruchu i drugi do polepszenia warunków pracy
17. samohamowalnością nazywa się własność zatrzymywania się silnika po zdjęciu sygnału sterującego, niezależnie od obciążenia. Mówi się, że silnik jest samohamowalny jeżeli przy załączonym obwodzie wzbudzania prędkość obrotowa wirnika zmaleje do zera natychmiat po obniżeniu do zera napięcia sterującego. Sterowanie silnikiem dwufazowym jako silnikiem wykonawczym jest możliwe tylko przy spełnieniu warunku samochamowalności
Wyszukiwarka
Podobne podstrony:
0 Podstawy WT Organizacja wykładuid 1852 ppt
1852
1852
1852
1852
Gustave Flaubert Correspondance 3e série 1852
Analiza Leon Wyczolkowski 1852 1936 Gra w krokieta,1892 95
więcej podobnych podstron