1. Parametry oraz charakterystyki statyczne i dynamiczne półprzewodnikowych przyrządów mocy
Przyrządy półprzewodnikowe w przekształtnikach energoelektronicznych
Do budowy przekształtników pracujących impulsowo stosowanych jest większość przyrządów półprzewodnikowych mocy. Główną rolę przyrządów roboczych odgrywają tu tranzystory, przede wszystkim sterowane napięciowo, tyrystory klasyczne i tyrystory wyłączalne (w układach dużej mocy). Diody spełniają natomiast funkcje pomocnicze i zabezpieczające (jak np. dioda rozładowcza).
W układach impulsowych spotyka się zazwyczaj dwa rodzaje diod: diody prostownicze szybkie i diody Schottky'ego (diody unipolarne). Przy budowie diod prostowniczych wykorzystuje się klasyczne złącze p-n, w diodach Schottky'ego korzysta się ze złącza metal-półprzewodnik m-s. Złącze metal-półprzewodnik posiada mniejszą barierę potencjału oraz charakteryzuje się mniejszym ładunkiem na płytce metalicznej, dzięki czemu dioda Schotky'ego posiada korzystniejsze właściwości dynamiczne.
W grupie tranzystorów mocy wyróżnia się trzy typy tranzystorów stosowanych w technice impulsowej: tranzystory bipolarne BJT sterowane prądem bazy (obecnie już rzadko stosowane),, tranzystory unipolarne MOSFET, sterowane napięciem bramki, tranzystory bipolarne IGBT , sterowane napięciem bramki. Dodatkowo w uzasadnionych przypadkach wykorzystuje się także tranzystory elektrostatyczne SIT.
Klasyczne tyrystory były stosowane w układach impulsowych w latach siedemdziesiątych i częściowo osiemdziesiątych. Układy impulsowe z tyrystorami klasycznymi SCR i ich modyfikacjami (tyrystory szybkie) wymagały stosowania rozbudowanych układów komutacyjnych typu LC ograniczającymi częstotliwość pracy i sprawność układu. Obecnie do budowy układów energoelektronicznych impulsowych dużej mocy stosuje się powszechnie tranzystory z izolowana bramką IGBT, tyrystory wyłączalne GTO oraz najnowsze konstrukcje wchodzące ostatnio - tyrystory załączane i wyłączane napięciowo (sterowanie unipolarne) MCT. Układy z tyrystorami GTO i MCT nie wymagają dodatkowych układów komutacyjnych [1, 4, 5, 17].
1.1. Diody
Dioda jest najprostszym zaworem elektrycznym jednokierunkowym niesterowanym. Diody niezależnie od typu charakteryzują się małym spadkiem napięcia przewodzenia (1,1...1,6V) i małym prądem wstecznym przy polaryzacji napięciem wstecznym rzędu setek lub tysięcy woltów (rys.1.1). Załączanie i wyłączanie diod nie jest jednak natychmiastowe [5].
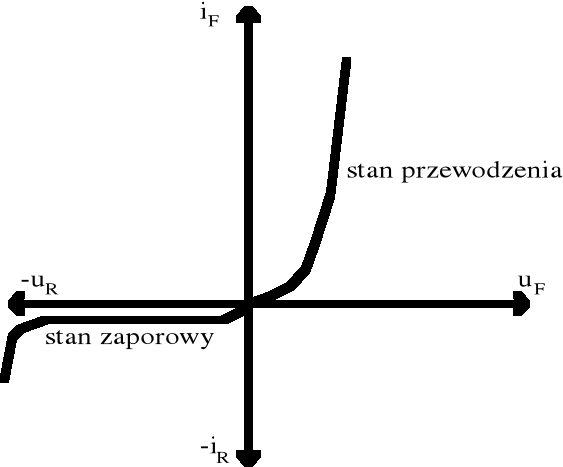
Rys. 1.1. Charakterystyka statyczna diod półprzewodnikowych
Przy załączaniu dioda bardzo krótko blokuje przepływ prądu przez czas (t<1μs) rekombinacji ładunków nagromadzonych na złączu w wyniku istniejącej tam samoistnej bariery potencjału, powodując chwilowe przejmowanie napięcia zasilania (rys.1.2 - "on"). Przy wyłączaniu natomiast w strukturze złącza diodowego musi być zrekombinowany ładunek przestrzenny powstały podczas przewodzenia. Dlatego przy wyłączaniu ujemnym impulsem napięciowym przez diodę płynie chwilowo prąd wsteczny, którego amplituda może osiągać wartość tego samego rzędu co wartość prądu przewodzenia występująca przed wyłączeniem (rys.1.2). Dioda odzyskuje właściwości zaworowe po upływie czasu życia ładunku przestrzennego trr (rys.1.2. - "off").
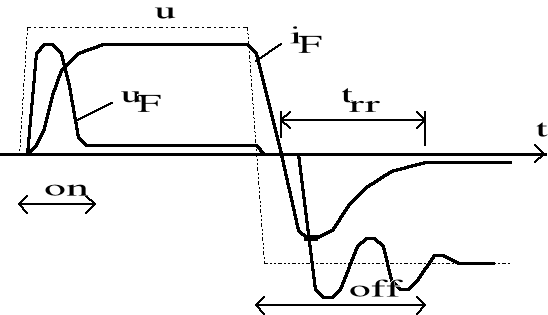
Rys. 1.2. Przebieg czasowy procesu załączania (on) i wyłączania (off) diody; przez iF oznaczono prąd diody, uF -napięcie na diodzie, u - napięcie zasilania układu z diodą
Diody szybkie, stosowane w układach przekształtników impulsowych przy stromym naroście napięcia zasilania posiadają kilkakrotnie mniejszy czas załączania niż klasyczne diody energetyczne. Z kolei diody Schottky'go charakteryzują się bardzo krótkim czasem załączania (praktycznie nie występuje przy ich załączaniu napięcie pomiędzy anodą
i katodą nie wzrasta powyżej 20% napięcia zasilania [6]) i bardzo krótkim czasem "życia" ładunku przejściowego Qrr. Dzięki temu czas wyłączania tej diody trr jest również krótki, powodując znacznie mniejsze straty mocy na wyłączanie i możliwość pracy przy wysokiej częstotliwości przełączania. We współczesnych konstrukcjach blokowych modułów elektroizolowanych diody dołączane odwrotnie równoleglej i niezależne diody rozładowcze wmontowywane są bezpośrednio na wspólnym krysztale, przez co eliminuje się dodatkowe połączenia tworzące tzw. indukcyjności pasożytnicze [5, 6].
1.2. Tranzystory
Tranzystory, niezależnie od typu, pracujące w układach energoelektronicznych różnią się w porównaniu do tranzystorów innych typów małą impedancję cieplną (<15K/W) i tym, że mogą pracować wyłącznie impulsowo to znaczy w jednym z dwóch stanów: załączenia lub wyłączenia (praca łącznikowa). Dlatego przysparzają najwięcej problemów
w procesach przejściowych załączania i wyłączania (przepięcia, przetężenia, straty mocy) [4, 5, 17].
1.2.1. Tranzystor bipolarny (BJT)
Tranzystor bipolarny średniej i dużej mocy nie może być spolaryzowany ujemnym napięciem uCE, ponieważ technologicznie równolegle z nim podłączona jest odwrotnie równolegle dioda D1 (rys.1.3). Większość układów łącznikowych z tranzystorami wyposażonych jest w zabezpieczenie przed przepięciami (DRC), służące również do ograniczenia łączeniowych strat energii.
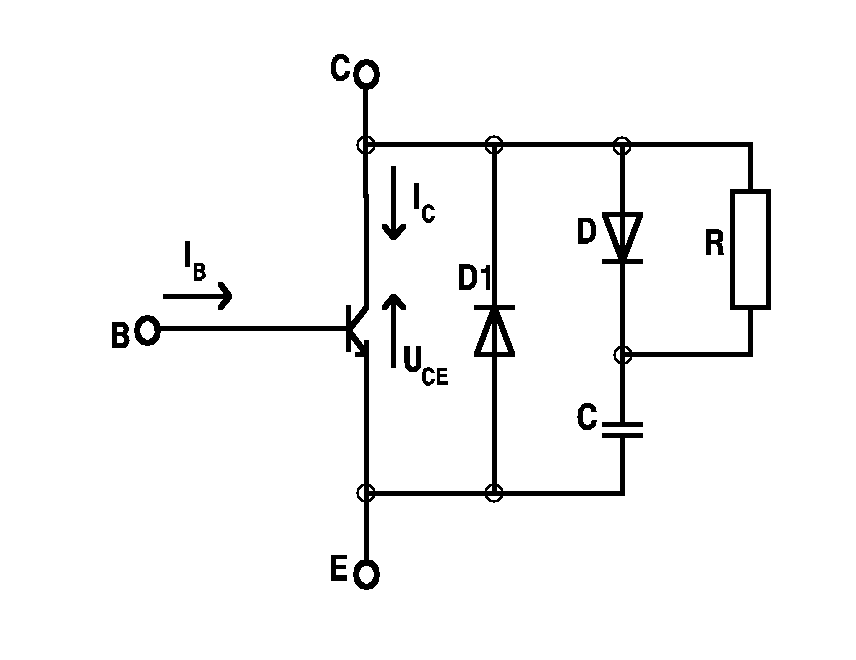
Rys. 1.3. Łącznik (klucz) tranzystorowy z diodą rozładowczą (zwrotną) i zabezpieczeniem przed przepięciami
Rozróżnia się trzy stany pracy łącznikowej układu tranzystorowego:
Stan blokowania (wyłączenia) tranzystora bipolarnego;
Zależność prądu kolektora IC od napięcia kolektor-emiter UCE przy różnych wartościach prądu bazy przedstawia rys.1.4, uwzględniający również położenia punktów przebicia złącza kolektor-emiter.
W stanie blokowania występują dwa etapy przebicia tranzystorów bipolarnych:
- pierwszy etap przebicia (lawinowe),
- drugi etap przebicia (niestabilność termiczna) mający miejsce przy IB>0 i UCE <UCE0) (forward second breakdown) albo przy IB <0 i UCE>UCE0 (reverse second breakdown).
Pierwszy etap przebicia następuje przy podwyższaniu napięcia UCE w pobliże wartości UCE0 (prąd bazy IB=0). Wówczas następuje powielanie liczby ładunków tworzących prąd kolektora IC aż do momentu powodującego niekontrolowany i nieodwracalny przepływ prądu tranzystora.
Drugi etap przebicia występuje po przekroczeniu punktu krytycznego w krysztale (chip) wówczas powstaje "nitka rozgrzanych" cząsteczek ułatwiających przepływ prądu, napięcie UCE spada do małych wartości i tranzystor zostaje zniszczony. Przyczyną uszkodzenia kryształu jest powstanie niejednorodnej strefy przepływu prądu (efekt sznurowy), wydzielanie dużej ilości ciepła i brak możliwości jego odpływu. W drugim etapie przebicia przy IB<0 płynący prąd kolektora (przy wyłączonym tranzystorze) jest szczególnie groźny, ponieważ "efekt sznurowy" w środku emitera przy trudnym przepływie prądu powoduje wydzielanie ciepła na bardzo małej powierzchni (duża gęstość prądu i mocy), co nie ma miejsca w przypadku dla IB>0. Dlatego producenci powinni podawać obciążalność napięciową tranzystorów z zapasem tak, aby zachować warunki pracy łącznikowej dla IB>0 i UCE<UCE0 (forward second breakdown) albo dla UCE>UCE0 i IB<0 (reverse second breakdown)
Rys. 1.4. Wartości napięć przebicia kolektor-emiter: UCE0 - graniczna wartość napięcia kolektor-emiter przy otwartym obwodzie bazy, UBR CE0- napięcie przebicia kolektor-emiter przy otwartym obwodzie bazy, UBR CER- napięcie przebicia kolektor-emiter przy zamkniętym obwodzie bazy rezystancją upływową, UBR CEX-napięcie przebicia kolektor-emiter przy IB <0, UCEX- graniczna wartość napięcia kolektor-emiter przy IB<0
Stan załączenia tranzystora
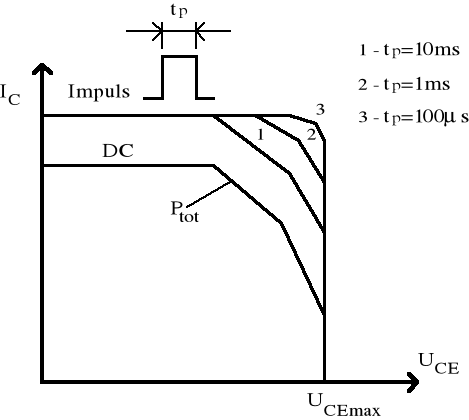
Obok charakterystyk wejściowych UCE=f(IC), na rys.1.5. przedstawiono zasadnicze trzy obszary pracy łącznikowej tranzystorów. Linie wyznaczają jednoznacznie zakresy: liniowej zależności IC=f(IB) (1), quasi nasycenia (2), zakres nasycenia (3).
Zakres liniowy. W tym zakresie tranzystor zmienia swą rezystancję wewnętrzną przez zmianę prądu bazy IB, tworząc stałe źródło prądowe, lecz ostatecznie prąd kolektora IC w dużym stopniu zależy od napięcia UCE, zwłaszcza przy małych wartościach napięcia.
Zakres quasi nasycenia występuje przy odpowiednio dużym prądzie bazy, tranzystor traci charakter źródła prądowego zmniejszając wydatnie rezystancję przewodzenia (rezystancja załączenia), napięcie kolektora spada do małych wartości i tranzystor przewodzi aktywnie prąd w obwodzie elektrycznym.
Zakres nasycenia. Zakres nasycenia występuje przy dalszym wzroście prądu bazy tranzystora, staje się on elementem niskoomowym, UCE=UCEsat przyjmuje wartości najmniejsze z możliwych, jednakże wtedy tranzystor ma znacznie trudniejsze warunki przy wyłączaniu, ponieważ tak głębokie nasycenie wydłuża czas opóźnienia wyłączania ts (storage time).
W układach energoelektronicznych pracujących impulsowo najdogodniej jest stosować zakres 2 (quasi nasycenie, AP2 na rys.1.5), ponieważ wtedy osiąga się kompromis pomiędzy stratami w tranzystorze a szybkością jego przełączania. Należy zaznaczyć tu, że wartość napięcia nasycenia UCEsat występuje tylko wtedy, gdy w obwodzie wystąpią nominalne wartości IB i IC.
Innymi ważnymi wielkościami w tranzystorze bipolarnym są średni prąd kolektora IC i maksymalny prąd kolektora ICM. Zwykle przy obciążeniu impulsowym prąd ICM jest 1.5 do 2 razy większy od prądu IC.
Rys. 1.5. Charakterystyki wyjściowe i funkcje łączeniowe tranzystora bipolarnego: 1 - zakres liniowej zależności IC=f(IB), 2 - zakres quasi nasycenia, 3 - zakres nasycenia
Załączanie
Podczas załączania podobnie jak w stanie załączenia dodatni prąd przepływa przez złącze baza-emiter. Dla układu z obciążeniem czysto-rezystancyjnym przejście ze stanu blokowania (zatkania, z punktu AP1, rys.1.6) do stanu przewodzenia (punkt AP2, rys.1.6) jest najszybsze, po linii prostej. Przy obciążeniu rezystancyjno - indukcyjnym (koniecznie z diodą rozładowczą) albo rezystancyjno-pojemnościowym, następuje "wykrzywienie" przebiegu napięcia kolektor emiter przy załączaniu (i wyłączaniu), nie powinno ono jednak przekroczyć dopuszczalnych wartości napięć i prądów. Największe przeciążenie prądowe może wystąpić przy załączaniu tranzystora obciążonego odbiornikiem rezystancyjno-pojemnościowym (z AP1 do AP2) i przy wyłączaniu tranzystora obciążonego odbiornikiem rezystancyjno-indukcyjnym (z AP2 do AP1), podczas których składowa bierna przeciwdziała kierunkowi zmian w obwodzie, przeciążając tranzystor.
Rys. 1.6. Linie przebiegów załączania i wyłączania przy różnych obciążeniach: a - załączanie odbiornika typu RC, wyłączanie odbiornika typu RL;
b - załączanie odbiornika typu R, wyłączanie odbiornika typu R, wyłączanie odbiornika typu RL z diodą rozładowczą; c - załączanie odbiornika typu RL (w tym również z diodą rozładowczą), wyłączanie odbiornika typu RC
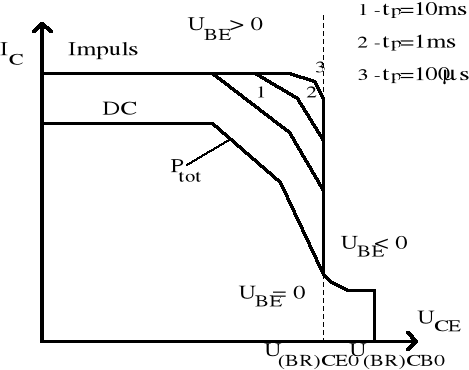
W normalnych warunkach pracy (UCC i IB dodatnie) należy zachować bezwzględnie graniczne wartości prądu kolektora IC w stanie załączenia, jak również napięcie kolektor-emiter UCE podczas procesu załączania. Diagram bezpiecznej pracy tranzystora bipolarnego (FBSOA) przedstawiono na rys.1.7.
Obszar bezpiecznej pracy tranzystorów bipolarnych przy polaryzacji dodatniej (Forward Biased Safe Operating Area) FBSOA
Rys. 1.7. FBSOA tranzystorów bipolarnych mocy dla określonej temperatury
i obciążeniu stałoprądowym
Wyłączenie
Przy wyłączaniu należy zwrócić uwagę na napięcie kolektor-emiter jak również na prąd kolektora dla specyficznej granicy przebiegu (obciążenie rezystancyjno-indukcyjne). Przypadek ten pokazuje diagram RBSOA na rys.1.8 (wykres dotyczy każdej dopuszczalnej temperatury).
Obszar bezpiecznej pracy tranzystorów bipolarnych przy polaryzacji dodatniej (Reverse Biased Safe Operating Area) RBSOA.
Rys. 1.8. RBSOA tranzystora bipolarnego przy pracy impulsowej
Zasada łączenia cyklicznego
Dla załączania cyklicznego istotnym jest długość trwania procesów przejściowych. Mają one wpływ na osiąganą częstotliwość pracy i straty mocy w elemencie. Na rys.1.9 zdefiniowano istotne czasy przełączania oraz podano przykłady przebiegów strat mocy w elementach.
Podczas procesu załączania rozróżniane są przedziały:
- czas opóźnienia td (delay time),
- czas narastania tr (rise time)
- czas załączania ton= td + tr.
O szybkości działania i stratach mocy w tranzystorach bipolarnych decyduje liczba nośników w obszarze bazy i możliwość ich wprowadzenia, wartość prądu bazy IB i szybkość narastania prądu bazy do stanu nasycenia tranzystora.
Wyłączanie trwa od stanu nasycenia przez moment osiągnięcia przez prąd kolektora wartości bliskich zeru (0,1ICM).
Tutaj rozróżnia się:
- czas magazynowania ts (storage time),
- czas opadania tf (fall time)
- czas wyłączania toff= ts+tf.
Czas magazynowania ts to przedział, w którym następuje rekombinacja elektronów ze strefy bazy i dziur ze strefy kolektora. W czasie ts nie zmienia się prąd kolektora IC (rozbiórka pamięci). Czas magazynowania zależy od stopnia nasycenia tranzystora i punktu, od którego rozpoczyna się proces wyłączania. Przy wyłączaniu nasyconego tranzystora należy zrekombinować większy ładunek przestrzenny niż w przypadku stanu quasi nasycenia. Dlatego tranzystory bipolarne pracujące impulsowo wprowadza się tylko do stanu quasi nasycenia (np. przez zastosowanie antynasyceniowej diody). Przez to pobór energii wyłączania wynikający ze strat mocy, przy odpowiedniej częstotliwości jest większy. Amplituda ujemnego prądu bazy IB wpływa na czas opadania tf (tym również na zmniejszenie czasu wyłączania). Im większy jest ujemny prąd bazy podczas opadania prądu kolektora, tym krótszy jest czas tf. Szczególnie przy wyłączaniu ze stanu nasycenia ważne jest sterowanie dużym ujemnym prądem bazy o dużej stromości opadania diB/dt, skracając tzw. ogon prądowy (w tym przypadku koniecznym jest zastosowanie szybkiej diody pomiędzy bazą a emiterem).
Reasumując, dla pewności działania tranzystora i małych strat przy pracy impulsowej, należy optymalizować sterowanie; skracać czas załączania, doprowadzić do strefy quasi nasycenia i ograniczyć przepięcia. Obecnie stosuje się specjalne układy sterowników scalonych generujących ostateczny prąd bazy. Oprócz regulacji prądu bazy w układach tych występuje ograniczenie prądu kolektora. Należy tutaj zachować przypadek UCE>UCEsat, ustawiając wartość prądu bazy. Przy zastosowaniu zabezpieczenia DRC ogranicza się przepięcia i straty łączeniowe, nie należy jednak przekraczać dopuszczalnej wartości UCE.
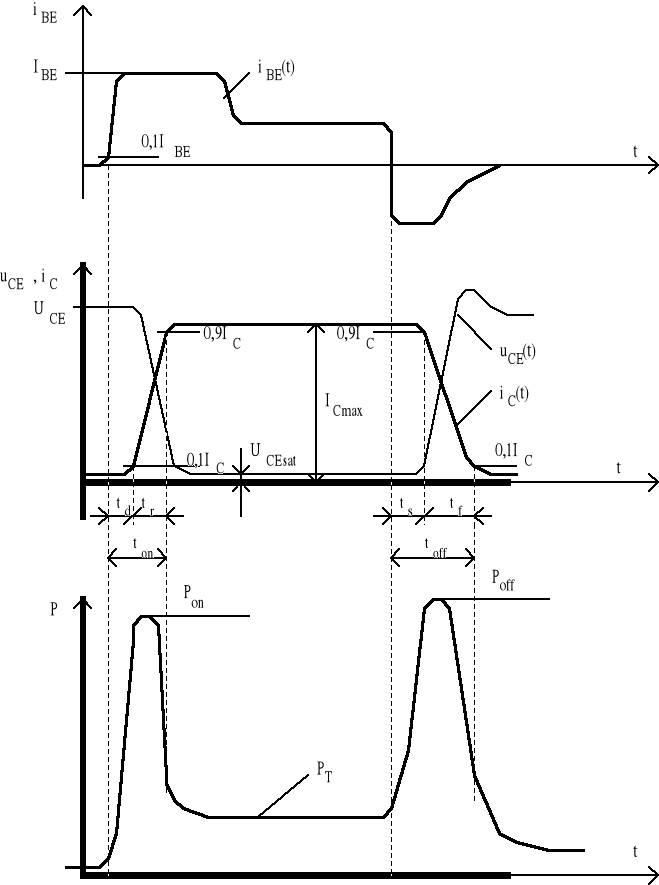
Rys. 1.9. Ilustracja definiująca czasy przełączania oraz starty mocy P podczas procesu załączania i wyłączania tranzystorów bipolarnych
W energoelektronice stawia się tranzystorom wymagania dopuszczalności przepływu dużego prądu i blokowania dużego napięcia. Aby uzyskać w pojedynczym tranzystorze duży prąd należy wysterować go odpowiednio dużym prądem bazy. Przykładowo typowy współczynnik wzmocnienia prądowego β pojedynczego tranzystora bipolarnego zmienia się od 200 przy UCE0=200V do 5 przy UCE0=1000V.
Pokonanie tego problemu jest możliwe w strukturach Darlingtona, które dzisiaj buduje się jako monolityczne i zintegrowane (rys.1.10). Wadą układu Darlingtona jest zbyt wysokie napięcie nasycenia kolektor-emiter i długi czas magazynowania ts.
W uproszczeniu możemy zapisać:
![]()
. (1.1)
stąd:
![]()
. (1.2)

Rys. 1.10. Schemat ideowy tranzystora w układzie Darlingtona
W stanie blokowania prąd kolektora tranzystora T1 płynie przez bazę tranzystora T2 i rezystancję R2, dlatego wzmocnienie prądowe tranzystora Darlingtona β jest mniejsze niż wynika to z zależności (1.2). Aby uniknąć ujemnego polaryzowania tranzystorów T1 i T2, pomiędzy emiter i kolektor tranzystora T2 dołączona jest odwrotnie równolegle dioda D2 technologicznie zintegrowana z tranzystorem Darlingtona. Dioda D1 uniemożliwia przepływ ujemnego prądu bazy tranzystora T1 przy ujemnym wysterowaniu układu, obniżając straty mocy sterowania i uniemożliwiając przeciążenie obwodu baza-emiter tego tranzystora. Dioda D2 w niektórych przypadkach spełnia również rolę diody rozładowczej (np. w falownikach napięcia) albo diody zwrotnej przy pracy łącznikowej (impulsowej) tranzystorów. Przy wysokich napięciach zasilania stosuje się dzisiaj potrójny układ Darlingtona wykonany w postaci zintegrowanego modułu.
1.2.2. Tranzystor unipolarny MOSFET
Do pracy łącznikowej (impulsowej) w układach przerywania prądu nadaje się szczególnie tranzystor unipolarny mocy MOSFET ze wzbogaconym kanałem n. Unipolarne tranzystory MOSFET są przyrządami półprzewodnikowymi o sterowaniu napięciowym,
w których prąd drenu reguluje się za pomocą sygnału napięciowego bramki o wartości do kilku woltów, co zapewnia kompatybilność ze wszystkimi układami MOS, zwłaszcza CMOS. Moc potrzebna do sterowania jest znikomo mała, a obszar bezpiecznej pracy jest większy niż w porównywalnych tranzystorach bipolarnych BJT. Krótsze są również czasy przełączania w stosunku do tranzystorów BJT. Jednakże tranzystory unipolarne mają większą rezystancję w stanie przewodzenia Ron, która przy wzroście napięcia dren-źródło (UDS) zwiększa się znacznie szybciej niż w tranzystorach bipolarnych. Z tego względu
w tranzystorach unipolarnych o dopuszczalnym napięciu UDS =1kV maksymalne obciążenie drenu nie przekracza 20 A. Dla mniejszych napięć UDS obciążenie to osiąga nawet 200...300A.
Schemat zastępczy i charakterystyka statyczna tranzystora MOSFET mocy
Rys. 1.11. Tranzystor MOSFET z kanałem n (BUZ 45) a) schemat zastępczy, b) charakterystyka statyczna
Podstawowymi parametrami powodującymi wydłużenie czasów przełączania są pojemności pasożytnicze występujące pomiędzy poszczególnymi elektrodami tranzystora unipolarnego MOSFET. W schemacie (rys.1.11) zaniedbano rezystancje połączeń występujące wraz z pojemnościami.
Pojemności pasożytnicze tranzystorów unipolarnych można określić przybliżonymi zależnościami:
- pojemność wejściowa (pojemność bramka - źródło + pojemność bramka - dren)
Crss=CGS+CGD (1.3)
- pojemność sprzężenia zwrotnego
Crss=CGD (1.4)
- pojemność wyjściowa (pojemność dren - źródło + pojemność Millera)
Coss=CDS+CGD (1.5)
Pojemność Millera CGD zależy w dużym stopniu od przyłożonego napięcia łączeniowego.
Napięcie odcięcia UGSth tranzystora (rys.1.12) zależy od przyłożonego napięcia bramka źródło (UGS). Ujemna wartość napięcia bramka-dren nie podwyższa zdolności zaworowej tranzystora MOSFET. Maksymalna wartość UGS wynosi 20V i nie można jej przekroczyć, z uwagi na możliwość przebicia izolacji SiO2 pomiędzy bramką a źródłem.
Przepływ prądu przez tranzystor rozpoczyna się po przekroczeniu napięcia odcięcia (progowego) UGSth. Zależność prądu drenu (ID) od napięcia dren-źródło (UDS) z parametrycznie zmieniającym się napięciem bramka - żródło (UGS) przedstawia rys.1.12.
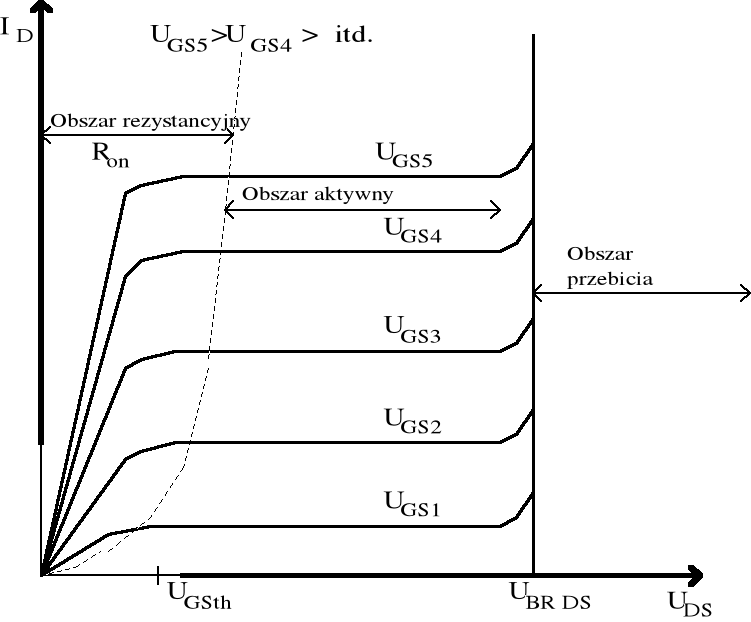
Rys. 1.12. Charakterystyka ID=f(UDS) dla tranzystora MOSFET
Obszar rezystancyjny jest odcinkiem charakterystyki przewodzenia rezystancyjnego (RDSon), którego długość zależy od zastosowanej wartości napięcia UGS. W zakresie tym tranzystor spełnia rolę źródła prądowego, sterowanego napięciem UGS. Obszar aktywny tzw. przewodzenia „sznurowego" do linii napięcia przebicia jest odpowiednikiem tzw. przewodzenia „sznurowego" w tranzystorze bipolarnym. W odróżnieniu od tranzystora bipolarnego, w tranzystorze MOSFET nie ma dwóch obszarów wyładowań przebijających. Praca tranzystora unipolarnego w obszarze przemieniającym przebicia (UBR DS) powoduje
z reguły nieodwracalne przebicie lawinowe. W kierunku ujemnym charakterystyka jest charakterystyką statyczną diody.
Proces przełączania tranzystora MOSFET i obszar pewnej pracy (SOA)
Proces przełączania tranzystora MOSFET limitowany jest przebiegiem ładowania pojemności wewnętrznej (Millera) w kanale przewodzenia.
Proces załączania. Załączanie realizowane jest sygnałem napięciowym bramkowym o kształcie prostokątnym, dzięki któremu ładowana jest wewnętrzna pojemność tranzystora Ciss. Po przekroczeniu napięcia progowego UGS th prąd drenu jest proporcjonalny do napięcia UGS. W przebiegu prądu drenu (rys.1.13) jest to widoczne w czasie narastania tr.
Proces wyłączania. W porównaniu do tranzystora bipolarnego, w tranzystorze MOSFET w procesie wyłączania nie występuje czas magazynowania. Na wartość czasu wyłączania ma wpływ pojemność wewnętrzna obwodu sterowania, prąd drenu opada w takt opadania napięcia UGS (czas opadania tf).
Po zakończeniu wyłączania (ID=0) przewodzenie prądu obciążenia powinna przejąć szybka dioda rozładowcza dołączona równolegle do odbiornika.
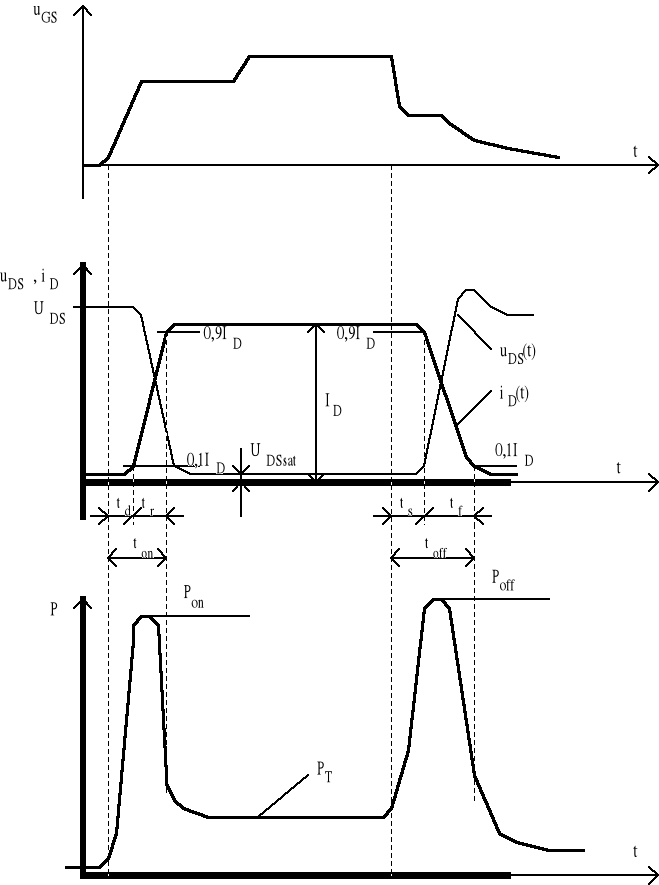
Rys. 1.13. Przebieg prądu i napięcia w procesie przełączania tranzystora MOSFET
Praca statyczna. Pewność (bezpieczeństwo) pracy tranzystorów MOSFET mocy ograniczona jest maksymalnym prądem drenu IDmax (graniczny prąd drenu dla pracy statycznej), maksymalnym prądem drenu dla pracy impulsowej IDMmax, maksymalnym napięciem dren-źródło UDSmax, a przede wszystkim maksymalnymi stratami mocy PVmax (maksymalną temperaturą kryształu (chipu) Tjmax).
Rys.1.14 przedstawia zakres bezpiecznej pracy (SOA) tranzystora MOSFET. Struktura ogniwowa tranzystora MOSFET i dodatni współczynnik temperaturowy powodują występowanie korzystnego zjawiska stabilizacji strat mocy w krysztale (chipie). W diagramie (rys.1.14) pokazano możliwość wykorzystania tranzystora MOSFET do pracy impulsowej, zwłaszcza przy prądzie impulsowym o krótkim czasie trwania.
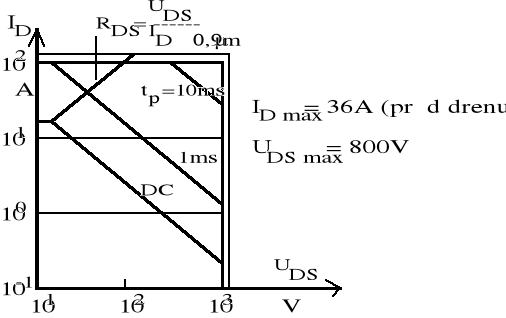
Rys. 1.14. Obszar bezpiecznej pracy (SOA) tranzystora MOSFET
W porównaniu do tranzystora bipolarnego, tranzystor MOSFET ma istotnie mniejsze straty mocy na przełączania zwłaszcza przy krótkich czasach trwania impulsu. Ograniczona jest możliwość zastosowania w tranzystorach MOSFET zabezpieczeń RC i DRC, ponieważ wydłużają one czas narastania i opadania w procesie przełączania. Należy zatem unikać tych zabezpieczeń i uwzględniać ich brak przy określaniu przepięć powstających przy wyłączaniu odbiorników o charakterze indukcyjnym.
Rezystancja przewodzenia RDSon uzależniona jest od napięcia przebicia UBR DS. Zależność tę można w przybliżeniu opisać [4]:
RDSon=(UBR DS)2,5 (1.6)
Zależność (1.6) określa równocześnie maksymalny prąd drenu IDMmax bez uwzględnienia dopuszczalnych strat mocy w tranzystorze. Maksymalne napięcie i prąd tranzystora MOSFET są obecnie porównywalne z odpowiednimi wartościami dotyczącymi tranzystora bipolarnego, np. UCE0=900V i IC=300A. Duże napięcie przebicia to równocześnie duża rezystancja przewodzenia RDSon, co przy pracy statycznej powoduje porównywalnie większe straty mocy, aniżeli w tranzystorze bipolarnym.
1.2.3. Tranzystory bipolarne z izolowaną bramką (insulated gate bipolar transistor) IGBT
Tranzystor IGBT jest kombinacją tranzystora bipolarnego i unipolarnego (MOS). Motywacją do zbudowania takiego tranzystora było to, że tranzystor MOSFET posiada bardzo dobre warunki sterowania (napięciowego), natomiast tranzystor bipolarny może przewodzić duże prądy, przy dużym napięciu zasilania a obie struktury można zintegrować w jednym krysztale (chipie). Przewagę w charakterystykach i właściwościach tranzystora IGBT nad alternatywnymi elementami (MOSFET, tranzystor bipolarny, tyrystor GTO, tyrystor MCT) przedstawiono w tabeli 1.1.

Rys. 1.15. Tranzystor IGBT, a) schemat zastępczy, b) podstawowa struktura, c) symbol
Na rys.1.15b pokazano strukturę, w której tranzystor IGBT otrzymano przez dodanie, metodą epitaksji, warstwę kolektorową p do warstwy drenu n otrzymując tzw. homogenację struktur. Wprowadzono w ten sposób do układu MOS dodatkowy układ tranzystorowy pnp pozostawiając sterowanie polowe (wejście MOS) napięciem dodatnim.
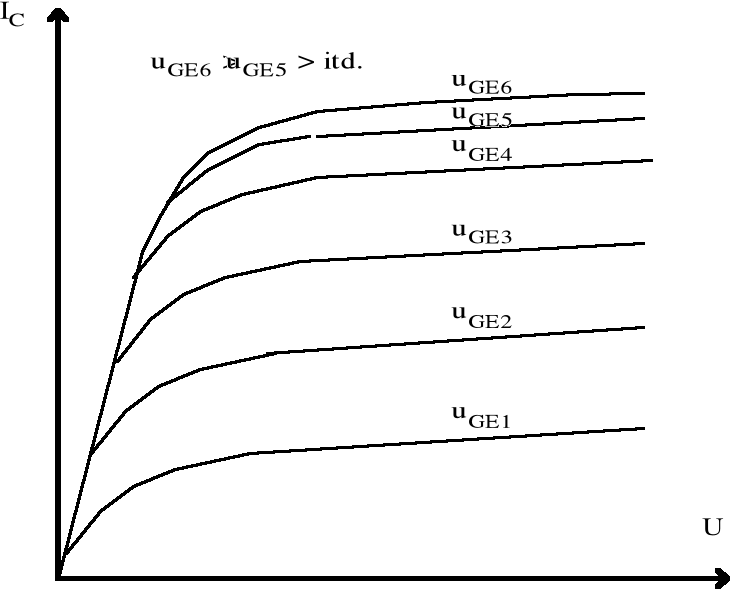
Rys. 1.16. Charakterystyka wyjściowa IGBT
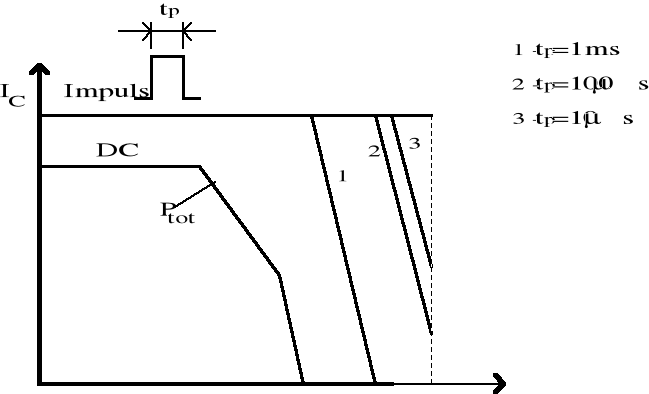
Rys. 1.17. Obszar bezpiecznej pracy SOA tranzystorów IGBT dla określonej temperatury i obciążeniu stałoprądowym

Rys. 1.18. Przebieg prądu i napięcia przy wyłączaniu IGBT, td off - czas wyłączania, tf1 - czas opadania prądu części MOS, tf2 - czas opadania prądu części pnp
Wartość napięcia nasycenia UCEsat tranzystora IGBT (rys.1.18) jest nieco większa niż w tranzystorach bipolarnych. Szczególnym problemem występującym w IGBT jest sprzężenie zwrotne pomiędzy tranzystorami T1 i T2 (rys.1.15a). Jest ono dodatnie i destabilizujące jak w strukturach tyrystorowych, powodując że przez pewien czas główny prąd (anodowy) może płynąć niezależnie od prądu przepływającego przez tranzystor MOS. Zjawisko to utrudnia wyłączenie IGBT przy zaniku napięcia bramki tworząc tzw. "ogon prądowy". Ten efekt w literaturze nazywany jest jako stan "latch-up" [4]. Wraz z rozwojem technologii produkcji IGBT problem ten staje się mniej istotny z uwagi na ciągłe zmniejszanie czasów wyłączania.
Wyłączanie IGBT odbywa się przez zwarcie bramki i emitera. Przebieg wyłączania (rys.1.17) podzielony jest na trzy fazy: czas magazynowania td off (ładowanie pojemności CGE), czas opadania prądu w strukturze MOS tf1 i czas opadania prądu w strukturze pnp tf2. Czas opadania tf1 zależy od stałej czasowej obwodu sterowania (mała rezystancja połączeń i pojemność CCG), czas tf2 ma charakter podobny jak w tranzystorach bipolarnych. Występuje tu zjawisko "ogona prądowego", które ze względu na dużą stromość opadania prądu powoduje występowanie przepięć i stwarza konieczność stosowania
i optymalizowania zabezpieczenia przeciw przepięciowego DRC.
Właściwości IGBT można scharakteryzować następująco:
IGBT może przenieść moc i posiada zdolność łączenia porównywalną
z tranzystorami bipolarnymi i unipolarnymi mocy, dla zakresu napięć ponad 3000V, prądów większych od 3000A i częstotliwości przełączania do 20kHz,IGBT jest korzystniejszym elementem mocy niż tyrystory GTO, tranzystory bipolarne i unipolarne (MOSFET),
załączanie IGBT odbywa się napięciem dodatnim a wyłączanie przez zwarcie bramki z masą (możliwe jest podanie ujemnego napięcia bramki przy wyłączaniu),
strukturę IGBT można łatwo integrować w układy scalone analogowe lub układy hybrydowe, można budować moduły z wielu elementów IGBT „upakowanych”
w jednej obudowie.
1.3. Tyrystory
Tyrystory - przyrządy czterowarstwowe - znalazły w energoelektronice szczególne zastosowanie. Tyrystor jest dwustanowym przyrządem półprzewodnikowym pracującym w trzech stanach: blokowania, przewodzenia i zaporowym. Wewnętrzne sprzężenie zwrotne prądowe dodatnie umożliwia przewodzenie tyrystora przy stosunkowo małym spadku napięcia. Załączanie tyrystora jest możliwe przez podanie impulsu prądowego, napięciowego, świetlnego itp. Ogólnie istnieje kilkanaście typów tyrystorów. Szczególną rolę odgrywa rodzina tyrystorów klasycznych SCR (Silicon Controlled Rectifier). Oprócz niej większe zastosowanie znalazły tyrystory GTO (Gate Turn Off) i MCT (MOS Controlled Thyristor).
Najistotniejsze różnice pomiędzy tyrystorami a tranzystorami są następujące:
tyrystory są elementami dwustanowymi, podczas gdy tranzystory mogą pracować teoretycznie jako wzmacniacze (w układach energoelektronicznych tranzystory pracują wyłącznie w dwóch skrajnych stanach - nasycenia (przewodzenia) i blokowania);
tyrystory posiadają o jedną warstwę półprzewodnikową więcej;
tyrystory posiadają znacznie większe parametry statyczne, większe prądy przewodzenia i większe dopuszczalne napięcia powtarzalne;
tyrystory globalnie posiadają znacznie gorsze parametry dynamiczne, długie czasy załączania i wyłączania, a także posiadają ograniczoną stromość narastania prądu przewodzenia i ograniczoną stromość narastania napięcia blokowania.
1.3.1. Tyrystory SRC
Budowa i zasada działania tyrystora
Podstawą jednokierunkowych tyrystorów jest czterowarstwowa struktura p-n-p-n
w monolitycznym krzemie zawierająca trzy złącza p-n. Aby struktura trójzłączowa spełniała swoje zadanie, musi być odpowiednio wykonana. Warstwy zewnętrzne typu p i n wymagają tak silnego domieszkowania, aby miały małą rezystywność i były w stanie dostarczyć dużą liczbę większościowych nośników prądu do warstw środkowych. Słabiej domieszkowana jest warstwa środkowa typu p, natomiast najmniejszą liczbę domieszek wprowadza się do warstwy środkowej typu n. Z tego powodu wszystkie trzy złącza są złączami niesymetrycznymi o odmiennych właściwościach. Doprowadzenie napięcia do zacisków głównych tyrystora powoduje naruszenie stanu równowagi, przy czym warstwy ładunku przestrzennego zmieniają się tak, aby przeciwdziałać powstałemu zakłóceniu. Po przyłożeniu do zacisków głównych tyrystora napięcia polaryzującego jak na rys. 1.19 (polaryzacja w kierunku zaworowym) złącze środkowe polaryzuje się w kierunku przewodzenia natomiast dwa skrajne złącza - w kierunku wstecznym, wobec czego prąd przewodzenia nie będzie przepływał przez tyrystor, który zachowuje się analogicznie jak dioda krzemowa spolaryzowana wstecznie. Po zmianie kierunku napięcia polaryzacji anody względem katody tyrystor przechodzi do stanu blokowania napięcia dodatniego (rys.1.19). W tym stanie pracy dwa skrajne złącza j1 i j3 polaryzują się w kierunku przewodzenia, środkowe zaś złącze j2 w kierunku wstecznym, co umożliwia przepływ prądu przez strukturę p-n-p-n i tyrystor będzie zablokowany, jeżeli nie zostanie przekroczone napięcie przełączające.

Rys. 1.19. Struktura tyrystora SCR w stanie zaworowym. Na rysunku oznaczono przez j1, j2, j3 kolejne złącza struktury, V - potencjał

Rys. 1.20. Struktura tyrystora SCR w stanie blokowania

Rys. 1.21. Struktura tyrystora SCR w stanie przewodzenia
Możliwy jest jeszcze trzeci stan, w którym dla dodatniej polaryzacji anody względem katody złącze środkowe traci swe właściwości zaworowe, a przez strukturę może przepływać prąd o dużej wartości, na tyrystorze natomiast występuje napięcie o niewielkiej wartości. Stan ten nazywa się stanem przewodzenia (rys.1.21). W celu wyjaśnienia zasady działania tyrystor można przedstawić w postaci schematu zastępczego zawierającego dwa tranzystory o wspólnych warstwach n1 i p1 (rys.1.22). Współczynniki wzmocnienia prądowego tranzystorów składowych oznaczono przez α1 i α2.
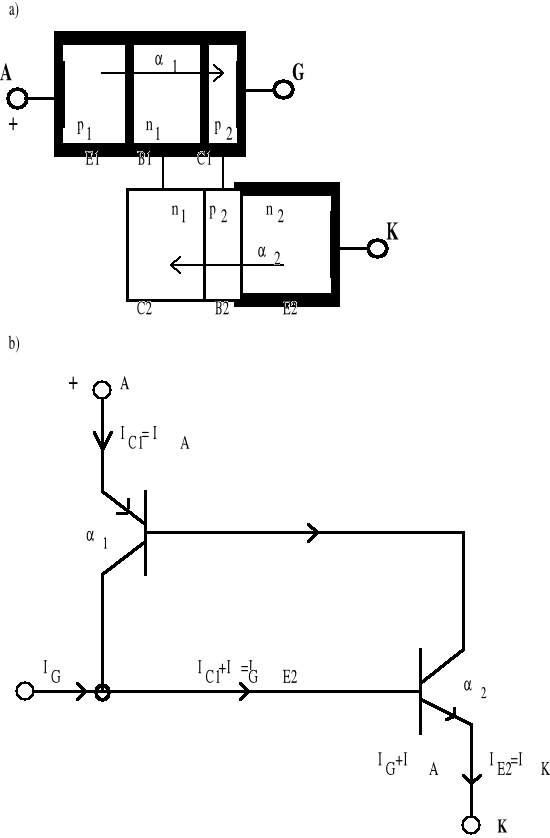
Rys. 1.22. Model dwutranzystorowy tyrystora SCR: a) schemat strukturalny,
b) schemat ideowy
Bazy tranzystorów zastępczych są zasilane prądami kolektorów, wskutek czego powstaje zjawisko dodatniego sprzężenia prądowego. Gdy α1 + α2 = 1, obydwa tranzystory składowe - dzięki istnieniu tego sprzężenia - przechodzą w stan nasycenia. Wskutek tego tyrystor lawinowo przechodzi w stan przewodzenia i praktycznie może być zablokowany tylko w przypadku zaniku prądu przepływającego pomiędzy anodą i katodą. Jeżeli α1 + α2<1, to środkowe złącze j2 nie nasyca się, jego bariera potencjału pozostaje dostatecznie wysoka i tyrystor jest zablokowany. Przełączanie tyrystorów ze stanu blokowania do stanu przewodzenia można dokonywać kilkoma sposobami, jednakże one sprowadzają się do nasycenia środkowego złącza j2. Zazwyczaj tyrystor jest przełączony przez podanie na bramkę impulsów prądowych o ustalonej wartości i określonym czasie trwania w warunkach dodatniego potencjału anody względem katody.
Charakterystyki i parametry statyczne tyrystorów
Wyróżnia się pięć stanów pracy tyrystorów (rys.1.23).
W pierwszej ćwiartce układu współrzędnych występują:
stabilny stan blokowania,
niestabilny stan przełączania,
stabilny czas przewodzenia,
W trzeciej ćwiartce występują:
stan polaryzacji wstecznej (stan zaworowy),
obszar przebicia.

Rys. 1.23. Główna charakterystyka statyczna napięciowo-prądowa tyrystora SCR

Rys. 1.24. Przebiegi czasowe napięć i prądów obwodu głównego tyrystorów ilustrujące sposób ich klasyfikacji w zakresie wymienionych parametrów
Parametry statyczne obwodu anodowego (rys.1.23 i 1.24).
Parametry napięciowe:
U(BR) |
- napięcie przebicia - napięcie wsteczne, przy którym prąd wsteczny przekracza określoną wartość, |
|
U(BO) |
- napięcie przełączania - napięcie główne w punkcie przełączania, |
|
URSM |
- niepowtarzalne szczytowe napięcie wsteczne - największa chwilowa wartość jakiegokolwiek niepowtarzalnego napięcia wstecznego występującego na tyrystorze, |
|
UDSM |
- niepowtarzalne szczytowe napięcie blokowania - największa wartość chwilowa jakiegokolwiek niepowtarzalnego napięcia blokowania, |
|
URRM |
- powtarzalne szczytowe napięcie wsteczne - największa chwilowa wartość napięcia wstecznego tyrystora z uwzględnieniem wszystkich powtarzalnych napięć przejściowych, |
|
UDRM |
- powtarzalne szczytowe napięcie blokowania - największa chwilowa wartość napięcia blokowania tyrystora z uwzględnieniem wszystkich powtarzalnych napięć przejściowych, |
|
URWM |
- szczytowe wsteczne napięcie pracy - największa chwilowa wartość napięcia wstecznego tyrystora z wyłączeniem wszystkich powtarzalnych i niepowtarzalnych napięć przejściowych, |
|
UDWM |
- szczytowe napięcie pracy w stanie blokowania - największa chwilowa wartość napięcia blokowania tyrystora z wyłączeniem wszystkich powtarzalnych i niepowtarzalnych napięć przejściowych. |
|
Parametry prądowe: |
|
|
|
|
|
ITSM |
- niepowtarzalny szczytowy prąd przewodzenia - największy dopuszczalny przeciążeniowy prąd przewodzenia o kształcie półsinusoidalnym nie powodujący przekroczenia maksymalnej temperatury struktury p-n-p-n i wynikający ze sporadycznych zakłóceń w obwodzie, |
|
ITRM |
- powtarzalny szczytowy prąd przewodzenia - największa chwilowa wartość prądu przewodzenia z uwzględnieniem wszystkich powtarzalnych prądów przejściowych. |
|
ITM |
- szczytowy prąd przewodzenia |
|
ITAV |
- średni prąd przewodzenia w czasie jednego okresu napięcia przemiennego |
|
ITAVM |
- prąd graniczny - maksymalny średni prąd przewodzenia, który tyrystor może przewodzić w sposób ciągły w układzie jednofazowym jedno kierunkowym o obciążeniu rezystancyjnym i kącie przewodzenia 180o elektrycznych, |
|
IL |
- prąd załączania - najmniejsza wartość prądu głównego konieczna do utrzymania tyrystora w stanie przewodzenia po przełączeniu tyrystora ze stanu blokowania do stanu przewodzenia, kiedy sygnał przełączający jest odłączony, |
|
IH |
- prąd wyłączania (prąd podtrzymania) - najmniejsza wartość prądu głównego niezbędna do utrzymania tyrystora w stanie przewodzenia przy rozwartym obwodzie bramki, |
|
I(BO) |
- prąd przełączania - prąd główny w punkcie przełączania, |
|
IRM |
- szczytowy prąd wsteczny - największa dopuszczalna wartość chwilowa prądu wstecznego płynącego przez tyrystor pod wpływem powtarzalnego napięcia wstecznego. |
|
Charakterystyki i parametry statyczne obwodu bramkowego przedstawiono na rys.1.25 w postaci rodziny charakterystyk napięciowo-prądowych złącza bramkowego.

Rys. 1.25. Pole bramkowych charakterystyk napięciowo-prądowych w kierunku przewodzenia
W katalogach przedstawia się zwykle w układzie współrzędnych UG, IG obszar ograniczony dwiema liniami. W tym obszarze musi przebiegać charakterystyka tyrystora danego typu. Obszar ten dzieli się następująco:
I |
- obszar niemożliwych przełączeń; |
II |
- obszar możliwych przełączeń; |
III |
- obszar pewnych przełączeń; |
IV |
- obszar możliwych uszkodzeń. |
|
|
|
Parametry bramkowe: |
|
|
|
|
|
UGD |
- napięcie nieprzełączające bramki - największa wartość napięcia bramki nie powodująca przełączania tyrystora ze stanu blokowania do stanu przewodzenia, |
|
IGD |
- prąd nieprzełączający bramki - prąd płynący przez bramkę przy napięciu nieprzełączającym bramki, |
|
UGT |
- napięcie przełączające bramki - napięcie bramki niezbędne do spowodowania przepływu prądu przełączającego bramki (IGT), |
|
IGT |
- prąd przełączający bramki - najmniejsza wartość prądu przewodzenia bramki niezbędna do przełączenia tyrystora ze stanu blokowania do stanu przewodzenia, |
|
UFGM (IFGM) |
- szczytowe napięcie (prąd) przewodzenia bramki - największa chwilowa wartość napięcia (prądu) przewodzenia bramki z uwzględnieniem wszelkich napięć (prądów) o charakterze przejściowym. |
|
Parametry I'GT i U'GT wykazują dużą zależność od temperatury (rys.1.25). Ze wzrostem temperatury ich wartości maleją, czyli poszerza się obszar pewnych przełączeń tyrystora. Poza tym pod wpływem temperatury zmieniają się charakterystyki bramkowe (rys.1.25). Na ich przebieg jak i na wartość prądu IGT ma również wpływ polaryzacja obwodu anodowego (rys.1.26 i 1.27).

Rys. 1.26. Zależność prądu przełączającego bramki od napięcia polaryzującego obwód główny tyrystora

Rys. 1.27. Wpływ prądu przewodzenia tyrystora na przebieg bramkowych charakterystyk napięciowo-prądowych
Parametry dynamiczne tyrystorów SCR
Wprowadzenie
Stany dynamiczne mają szczególne znaczenie w przypadku pracy tyrystorów o częstotliwości przekraczającej 400-500 Hz lub w układach energoelektronicznych z komutacją wewnętrzną (wymuszoną). Wówczas w ograniczonych odstępach czasowych występuje załączanie i wyłączanie struktury półprzewodnikowej p-n-p-n. W tyrystorach procesy te zachodzą z reguły dla dużych wartości szczytowych prądów i wysokich napięć (rzędu kilowoltów). Okoliczności te muszą być brane pod uwagę zwłaszcza w projektowaniu układów przekształtnikowych, pracujących w warunkach obciążeń impulsowych i zwiększonej częstotliwości.
Proces załączania tyrystora
Dynamiczny proces załączania tyrystora doprowadza tyrystor do stabilnego stanu przewodzenia. Ma on miejsce przy dodatnim napięciu między anodą i katodą (polaryzacja w kierunku przewodzenia) oraz gdy do bramki zostanie doprowadzony impuls prądowy o określonych parametrach, wówczas rozpoczyna się proces załączania tyrystora.
W wyznaczonym przedziale czasu następuje obniżenie się napięcia głównego na tyrystorze do wartości UT rzędu 1,5...2V oraz wzrost prądu do wartości IT (rys.1.28). Z podanych przebiegów widać, że impedancja tyrystora zmienia się w ciągu kilku mikrosekund o kilka rzędów wartości. Początkowo przewodzenie prądu odbywa się w bezpośrednim sąsiedztwie bramki, aż po upływie pewnego czasu obejmuje cały przekrój poprzeczny struktury. Gęstość prądu tyrystora w procesie załączania jest duża i stwarza niebezpieczeństwo lokalnego przegrzania i zniszczenia cieplnego struktury.
Przebieg procesu załączania zależy od geometrii warstw półprzewodnika, parametrów impulsu bramkowego, wartości napięcia anodowego oraz rodzaju obciążenia tyrystora.
W procesie załączania można wyróżnić dwa podstawowe parametry (rys.1.28):
czas załączania - tgt, krytyczna stromość narastania prądu przewodzenia (diT/dt)crit.
Czas załączania tyrystora tgt jest to czas jaki upływa od chwili, w której prąd bramki osiąga 0,1 wartości szczytowej IGM, do chwili w której napięcie główne tyrystora obniży się do 0,1 wartości szczytowej UDM. Czas załączania jest sumą czasu opóźnienia td i czasu narastania tr.
Czas opóźnienia td jest to czas od chwili, w której prąd bramki osiąga wartość 0,1 IGM, do chwili kiedy napięcie główne zmniejszy się do wartości 0,9 UDM. Czas ten prawie nie zależy od obciążenia i w zależności od parametrów impulsu bramkowego może wynosić 0,5 - 100 μs [4].
Czas narastania tr odpowiada zmianie napięcia głównego tyrystora od 0,9 do 0,1 UDM. Zależy on od wartości i stromości narastania prądu tyrystora, temperatury
i nieznacznie od parametrów impulsu bramkowego oraz wynosi 0,2 - 5 μs [4, 5, 6, 17].
Czas załączania rośnie ze wzrostem grubości warstw struktury (np. w tyrystorach
o wysokim napięciu). Zmniejszenie czasu załączania osiąga się przez zwiększenie IGM oraz diT/dt, a także wzrost tiG, UDM, ϑj [5]. Po upływie czasu narastania tyrystor znajduje się w stanie przewodzenia, pomimo, iż poprzeczne rozprzestrzenianie się obszaru przewodzenia trwa nadal, aż do ustalenia się wartości prądu IT i napięcia UT.
Krytyczna stromość narastania prądu przewodzenia (diT/dt)crit jest to największa wartość stromości prądu, która w określonych warunkach załączania tyrystora nie powoduje jego uszkodzenia. Wartość (diT/dt)crit zmniejsza się ze wzrostem napięcia i prądu głównego oraz temperatury złącza, natomiast zwiększa się ze wzrostem amplitudy
i stromości czoła impulsu bramkowego (forsowanie) [4].
Proces wyłączania tyrystora
Proces wyłączania tyrystora polega na opróżnieniu wszystkich złączy struktury z nośników swobodnych. Jest to stan dynamiczny i oznacza przejście tyrystora od stanu przewodzenia do stanu blokowania poprzez stabilny stan zaworowy. Może to nastąpić w wyniku zmniejszenia prądu przewodzenia tyrystora poniżej wartości podtrzymania IH (rekombinacja naturalna) lub poprzez wsteczne spolaryzowanie przewodzącego tyrystora (jest to sposób wymuszony).
Rysunek 1.28 przedstawia odpowiednie przebiegi czasowe podczas wymuszonego wyłączania tyrystora. Proces wyłączania tyrystora przebiega następująco. Pod wpływem zewnętrznego źródła napięcia o polaryzacji właściwej dla stanu zaworowego prąd przewodzenia tyrystora zaczyna maleć i po przejściu przez zero zmienia kierunek. Przyczyną takiej zmiany kierunku jest obecność w pierwszej fazie wyłączania dużej liczby nośników prądu, co uniemożliwia powstanie bariery potencjału. Gdy większość nośników zostanie odprowadzona z obszaru struktury, wówczas tyrystor zaczyna uzyskiwać zdolności zaworowe. Następuje gwałtowne ograniczenie prądu wstecznego do wartości IR. W obwodach z indukcyjnością zmniejszanie prądu wstecznego od wartości IRM do IR , powoduje dodatkowy wzrost napięcia, czyli przepięcie komutacyjne. Proces wyłączania tyrystora trwa nadal, aż do odzyskania przez przyrząd zdolności blokowania napięcia

Rys. 1.28. Przebiegi czasowe napięcia i prądu głównego tyrystora w procesie załączania i wyłączania
W kierunku przewodzenia i kończy się z chwilą pełnej rekombinacji nadmiarowych nośników prądu w obszarze złącza środkowego. Charakterystyczne parametry dotyczące procesu wyłączania tyrystora to:
czas wyłączania tq,
ładunek przejściowy podczas wyłączania Qrr,
krytyczna stromość narastania napięcia blokowego (duD/dt)crit.
Czas wyłączania tyrystora tq jest to najmniejszy przedział czasu od chwili osiągnięcia wartości zero przez prąd główny do chwili osiągnięcia wartości zero przez napięcie blokowania, przy czym tyrystor nie zostanie jeszcze załączony. Charakteryzuje się on dwiema składowymi:
czasem odzyskiwania zdolności zaworowej trr zawartym między chwilami osiągnięcia przez prąd główny tyrystora wartości zerowej a ustaleniem się wartości prądu wstecznego; jest sumą czasu odprowadzania ładunku przestrzennego (ts) i czasu odprowadzania ładunku resztkowego (tf) - rys.1.28;
czasem rekombinacji tre nośników ładunków w obszarze środkowego złącza struktury
p-n-p-n; po upływie omawianego czasu do głównych zacisków tyrystora można doprowadzić napięcie blokowania, natomiast wcześniejsze pojawienie się napięcia blokowania (linie przerywane na rys.1.28) spowoduje powrót tyrystora do stanu przewodzenia.
Czas wyłączenia zależy od wartości prądu tyrystora ITM przed wyłączeniem oraz temperatury złącza. Ładunek przejściowy podczas wyłączania Qrr stanowi część ładunku nośników nadmiarowych, która nie zanika poprzez rekombinację w obszarach bazowych struktury p-n-p-n, lecz zostaje usunięta w postaci prądu wstecznego. Wartość Qrr rośnie ze wzrostem amplitudy prądu przewodzenia ITM przed wyłączeniem, stromości narastania prądu wstecznego diR/dt oraz temperatury złącza [4].
Krytyczna stromość narastania napięcia blokowania /duD/dt/crit jest to największa wartość stromości nie powodująca jeszcze załączenia tyrystora w określonych warunkach [4]. Załączenie tyrystora spowodowane przekroczeniem stromości krytycznej jest wynikiem pojemności własnej środkowego złącza struktury.
1.3.2. Triak - tyrystor symetryczny dwukierunkowy
Triak może być traktowany jako odwrotnie równoległe połączenie w jednej strukturze pięciozłączowej dwóch tyrystorów (rys.1.29). Element ten może przewodzić prąd w dwu kierunkach, a załączenie odbywa się poprzez podanie impulsu prądowego na bramkę. Możliwe jest (w zależności od rodzaju elementu) załączenie dodatnim lub ujemnym impulsem prądowym w obwodzie połączonym jedną z elektrod głównych.

Rys. 1.29. Tyrystor symetryczny (triak): a) struktura złącza, b) główna charakterystyka napięciowo-prądowa
1.3.3. Tyrystory wyłączalne GTO
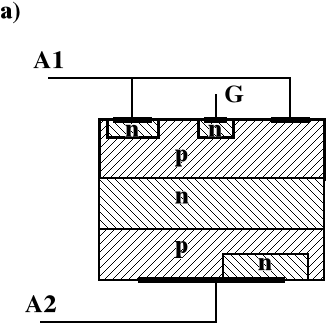
Tyrystor wyłączalny GTO jest przyrządem, który może być przełączany ze stanu blokowania do stanu przewodzenia (załączanie) i odwrotnie (wyłączanie) przez doprowadzenie do bramki sygnałów sterujących o odpowiedniej polaryzacji; dodatniej przy załączaniu i ujemnej przy wyłączaniu. Nowoczesny tyrystor GTO posiada wielokatodową konstrukcję scaloną złożoną z szeregu połączonych równolegle segmentów (rys.1.30) stanowiących jak gdyby serię niewielkich tyrystorów wyłączalnych.
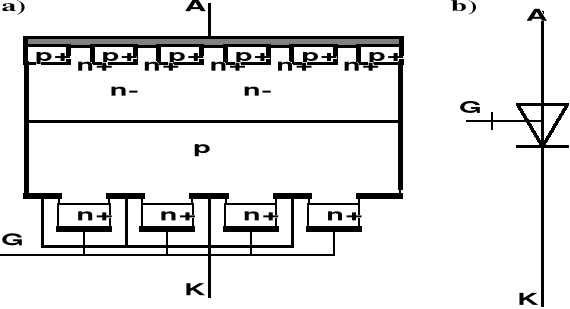
Rys. 1.30. Tyrystor GTO: a) podstawowa struktura, b) symbol
Załączenie tyrystorów GTO odbywa się w podobny sposób do załączania tyrystorów klasycznych SCR. Układy wyzwalania bramkowego są tu jednak bardziej złożone, ponieważ prąd bramkowy musi tu być znacznie większy niż w przypadku tyrystorów SCR (każdy segment posiada swoją niezależną bramkę). Oprócz tego prąd bramki musi płynąć przez cały czas pracy tyrystora GTO, zwłaszcza przy małych obciążeniach tyrystora, bowiem wtedy część segmentów może się włączyć a ponowny wzrost prądu obciążenia może spowodować przeciążenie przewodzących segmentów; zbyt duża gęstość prądu, możliwe uszkodzenie tyrystora.

Rys. 1.31. Charakterystyka statyczna tyrystora GTO
Wyłączanie tyrystorów GTO odbywa się przez podanie ujemnego impulsu prądowego na bramkę. Prąd ten powinien być tylko 3-6 razy mniejszy od prądu wyłączanego. Ze względu na tak duże prądy wyłączające bramki należy stosować złożone układy sterowania (rys. 1.32)

Rys. 1.32. Przykładowe rozwiązanie układu sterowania tyrystora GTO
Czas załączania tyrystora GTO definiuje się analogicznie jak czas załączania tyrystora SCR, zaś typowe wartości czasów załączania GTO są tego samego rzędu co SCR. Czas wyłączania tyrystorów GTO definiuje się natomiast jak czas wyłączania tranzystorów mocy. Czasy wyłączania tgq wynoszą od kilku do kilkudziesięciu mikrosekund. Przez pewien czas po wyłączeniu tyrystora GTO (do 30μs) płynie jeszcze tzw. prąd resztkowy (prąd ogonowy) do chwili gdy jego wartość spadnie poniżej prądu wyłączania IH. Ze względu na segmentową budowę ładunek przejściowy tyrystorów GTO jest mniejszy niż w tyrystorach SCR.
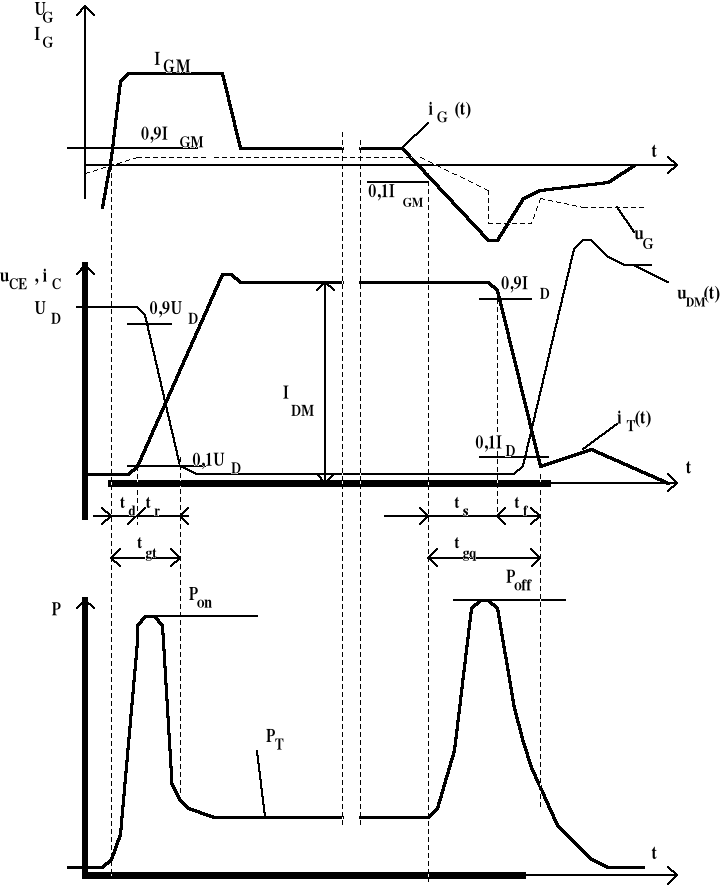
Rys. 1.33. Przebieg prądu, napięcia i mocy strat przy wyłączaniu tyrystora GTO, tgt - czas wyłączania, tgq - czas wyłączania
1.3.4. Tyrystory wyłączalne MCT
Tyrystor MCT (MOS Controlled Thyristor), czyli tyrystor sterowany napięciowo tranzystorem MOS, jest jedną z najciekawszych i najnowocześniejszych konstrukcji, która pojawiła się w ostatnich latach (rys.1.34). Podobnie jak tranzystor IGBT jest przyrządem bipolarnym pełni sterowalnym, załączanym i wyłączanym za pomocą tranzystora MOSFET będącego elementem konstrukcji scalonej.


Rys. 1.34. Tyrystor MCT: a)symbol, b) struktura podstawowa, c) schemat zastępczy
Zaletami tyrystorów MCT w porównaniu z tranzystorami IGBT są małe straty przewodzenia przy równoczesnej łatwości uzyskiwania wysokich napięć statycznych przebicia. Ich właściwości dynamiczne są gorsze od właściwości dynamicznych tranzystorów IGBT, lecz lepsze od właściwości dynamicznych tyrystorów GTO. Załączanie tyrystorów MCT następuje przez podanie ujemnego napięcia bramki względem katody (przewodzenie tranzystora MOSFET p-kanałowego), a wyłączenie za pomocą napięcia dodatniego (przewodzenie tranzystora MOSFET n-kanałowego). Jak dotychczas tyrystory MCT nie znalazły szerszego zastosowania. Istotny wpływ na ich rozwój miały pozytywne właściwości i parametry tranzystorów IGBT.
16
4
CE
UCE
Wyszukiwarka