LABORATORIUM PODSTAW METROLOGII M-T
Ćwiczenie nr 1
SYSTEMY POMIAROWE
Cz.2. „Inteligentne przyrządy pomiarowe”
Wprowadzenie.
Pod pojęciem „ inteligentny przetwornik pomiarowy” ( „IPP” ) należy rozumieć przetwornik pomiarowy wyposażony w system mikroprocesorowy, umożliwiający oprócz sterowania pracą układów przetwornika również komunikację z zewnętrznym komputerem lub innymi tego rodzaju przyrządami. Ponadto w przetworniku tym mogą być dokonywane różne zaprogramowane operacje arytmetyczno-logiczne na sygnałach uzyskiwanych z czujnika pomiarowego. Programowanie tych operacji może odbywać się za pomocą własnej klawiatury przetwornika lub zewnętrznego komputera z odpowiednim oprogramowaniem. Sygnał wyjściowy przetwornika w postaci lub analogowej ( np. 0...10V, 4...20 mA ) lub cyfrowej może być przesyłany do współpracujących z nim urządzeń zewnętrznych ( komputer lub inne tego typu przyrządy ). Przetworniki „IPP” często oprócz pamięci programu mają pamięć typu EEPROM , w której zapisane są charakterystyki najczęściej występujących w praktyce obiektów pomiarowych ( np. funkcje kształtu różnych zbiorników w przypadku pomiarów poziomu cieczy ). Program w pamięci przyrządu „IPP” pozwala na realizację licznych funkcji przez ten przyrząd. W przypadku przepływomierzy „IPP” wykorzystywanych do celów rozliczeniowych podstawową funkcją jest funkcja „TOTALIZER”, która pozwala na odczyt sumarycznej ilości badanego medium od chwili uruchomienia przyrządu pomiarowego do chwili odczytu ( podobnie jak w przypadku licznika energii elektrycznej ). Na polu odczytowym przepływomierza oprócz wartości „TOTALZER” może być wyświetlana wartość innej wielkości np. bieżący przepływ w wybranych jednostkach pomiarowych ( [m3/h], [kg /s], [m /s] itd.). Na ekranie monitora komputera zewnętrznego jednocześnie może być wyświetlona większa ilość parametrów mierzonej wielkości. Przepływomierze firmy Endress+Hauser zainstalowane na stanowisku laboratoryjnym mogą pracować niezależnie lub w komputerowej sieci pomiarowej ( do 16-tu przyrządów w sieci ). Przyrządy pomiarowe „IPP” pracujące w sieci są adresowane za pomocą zewnętrznego komputera. Adresy ( w postaci liczbowej ) i nazwy ( etykiety tekstowe ) umożliwiają komunikację oraz ułatwiają rozpoznanie konkretnego przyrządu pracującego w sieci. Odczyt wyników pomiaru z poszczególnych przyrządów pracujących w sieci odbywa się w trybie szeregowej dwukierunkowej transmisji inicjacji przez komputer z oprogramowaniem „Commuwin II”. W tym trybie pracy brak jest na jego wyjściu sygnału analogowego np. 4...20mA. Jeśli w sieci pracuje tylko jeden przyrząd to możliwe jest jednoczesne przesyłanie sygnału cyfrowego i analogowego. Na omawianym stanowisku laboratoryjnym znajdują się następujące przyrządy „IPP”:
przepływomierz wirowy „Prowirl 77”,
przepływomierz elektromagnetyczny „Promag 33”
dwa uniwersalne manometry różnicowe typu „Deltabar S”.
Zasadę działania omawianych przepływomierzy oraz układ pomiarowy z tymi przyrządami przedstawiono w opisie ćwiczenia laboratoryjnego pt. „Przemysłowy pomiar przepływu wody”. W ćwiczeniu laboratoryjnym dotyczącym badania „ inteligentnych przetworników pomiarowych” wybrano do badań manometry różnicowe typu „Deltabar S.” Mogą one być zaprogramowane do pomiaru ciśnienia różnicowego, poziomu lub przepływu cieczy. Programowalne funkcje i sposób ich programowania przedstawiono na rys.1. Jedną z ważnych funkcji „IPP” jest funkcja kształtowania charakterystyki przetwarzania przez programistę ( 21 punktów charakterystyki wpisywanych w postaci par liczb [ x , y ] w odpowiednich polach okna dialogowego ). Ma to istotne znaczenie w przypadku nieliniowych zależnościach sygnału czujnika pomiarowego od mierzonej wielkości na przykład przy pomiarze przepływu cieczy za pomocą różnych zwężek pomiarowych , rurek spiętrzających w zbiornikach o nietypowych kształtach.
Omawiane „inteligentne” przyrządy pomiarowe cechuje uniwersalność wynikająca z dużej ilości możliwych do zaprogramowania funkcji ( kształtowanie zakresu pomiarowego, linearyzacja, wybór jednostki pomiarowej, kształtowanie charakterystyki przetwarzania, linearyzacja, funkcje alarmu itp.).
Ze względu na dużą liczbę funkcji „IPP” oraz wymagane w przemyśle małe gabaryty mają one prostą klawiaturę do programowania ( np. 4 przyciski w przypadku manometru „Deltabar S” ). Konsekwencją tego jest stosunkowo skomplikowana procedura programowania wymagająca wielokrotnego użycia tych samych klawiszy do programowania różnych funkcji przyrządu. W praktyce programowanie takich przyrządów za pomocą ich własnej klawiatury może być utrudnione zwłaszcza wtedy, gdy są one zainstalowane w trudnodostępnych miejscach obiektu przemysłowego. W takich sytuacjach korzystna jest opcjonalna możliwość programowania „IPP” za pomocą zewnętrznego komputera z oprogramowaniem „Commuwin II”. Programowanie „IPP” przy pomocy tego programu ułatwiają matryce operacyjne oraz okna dialogowe wyświetlane na ekranie monitora.
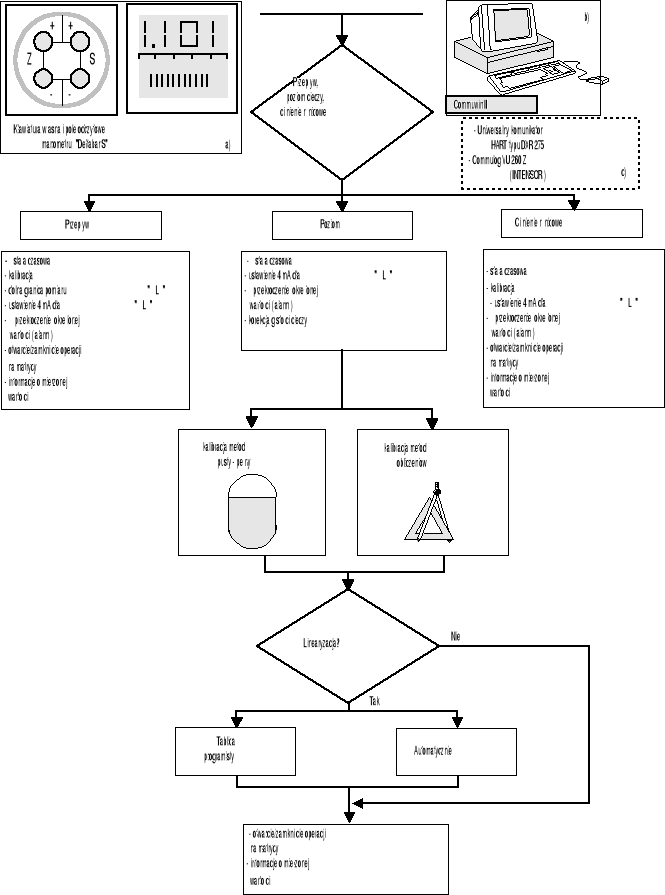
Na rys.1 przedstawiono w uproszczeniu proces programowania manometru różnicowego „Deltabar S”, przy czym rozwinięto jedynie pion programowania manometru wykorzystywanego do pomiaru poziomu cieczy w zbiorniku.
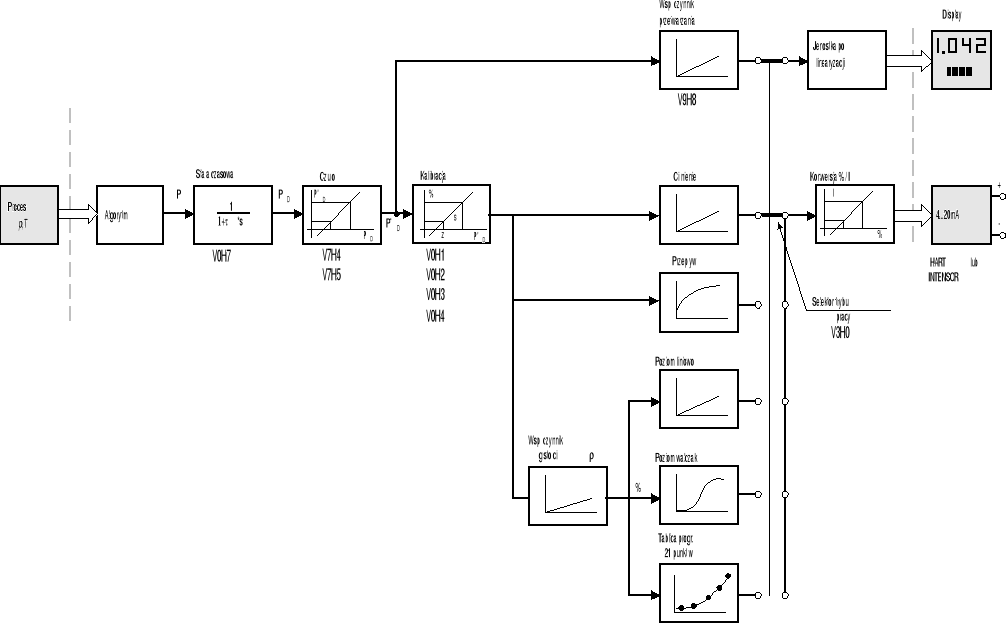
Na rys.2 pokazano uproszczony schemat funkcjonalny manometru różnicowego „Deltabar S”. Ilustracja procesu programowania manometru „Deltabar S” jak na rys.1 i rys.2 ułatwia programiście korzystanie z matrycy programowania wyświetlanej na ekranie monitora. Wielkościami wejściowymi dla manometru ( rys.2 ) są: ciśnienie p. ( różnica ciśnień ) badanego procesu i temperatura T badanego medium. Na rys.2 podano przy blokach funkcjonalnych kody odpowiednich pól matrycy HART wykorzystywanej przy programowaniu manometru za pomocą komputera z oprogramowaniem Commuwin II.
Opisana w ćwiczeniu procedura programowania jest taka sama dla całej rodziny przyrządów „IPP” firmy Endress+Hauser i innych producentów przemysłowej aparatury kontrolno-pomiarowej ( Siemens, Philips ).
Przyrządy „IPP” można rozpatrywać jako układy dwuczłonowe, w których pierwszy człon stanowi czujnik pomiarowy ( zasadę działania czujników tych przyrządów omówionow ćwiczeniu pt. „Przemysłowy pomiar przepływu” ) o ustalonych parametrach przez producenta, a drugim jest mikroprocesorowy programowany przetwornik sygnałów z czujnika pomiarowego. W tej części przyrządu pomiarowego realizowane są wszystkie tzw. „ inteligentne” funkcje przyrządu.
W przedmiotowym ćwiczeniu laboratoryjnym bada się właściwości wybranych funkcji „IPP” na przykładzie manometru „Deltabar S” współpracującego z normalną kryzą pomiarową lub z rurką spiętrzającą ( rurka Pitot'a ) w układzie do pomiaru przepływu wody. Ze względu na możliwość uszkodzenia klawiatury własnej manometru ( przyciski +Z, -Z, +S, -S ) przy częstym ich używaniu w ćwiczeniu wykorzystuje się komputer z oprogramowaniem Commuwin II. Programowanie „IPP” może odbywać się wtedy poprzez matrycę operacyjną ( matryca HART ) widoczną w oknie dialogowym „Commuwin II - ZA 672 PIC 004 PMD 230” lub poprzez okno graficzne „Graphic support - status”.
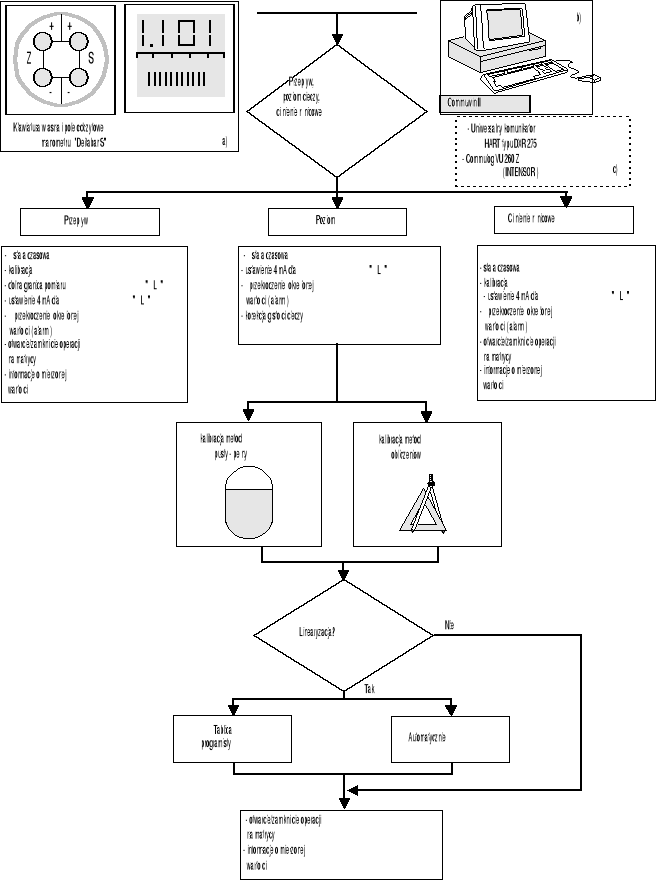
Rys.1. Szkic struktury programowania manometru różnicowego „Deltabar S”.
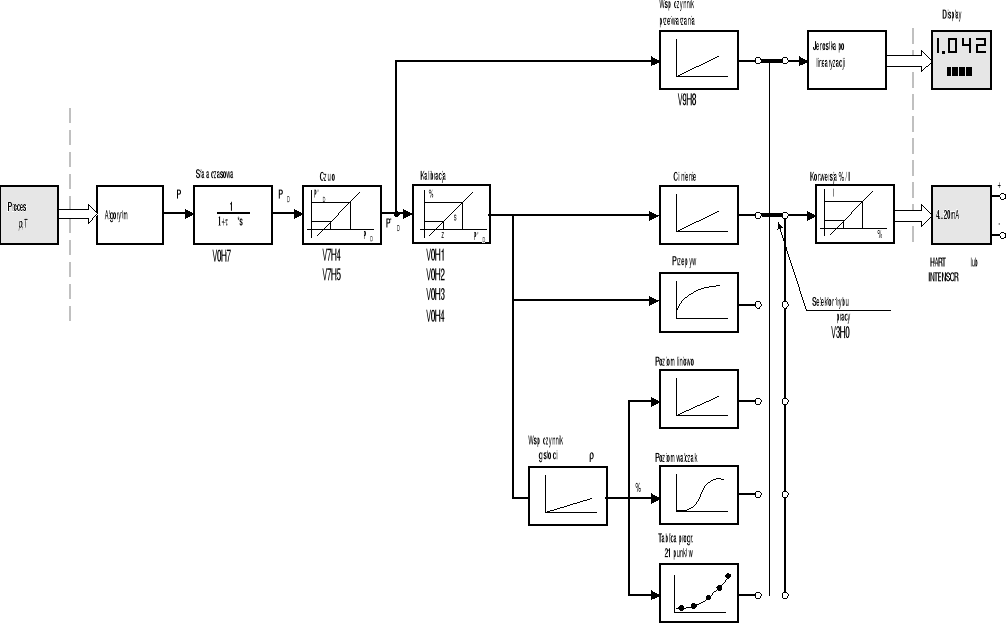
Schemat funkcjonalny manometru „Deltabar S”
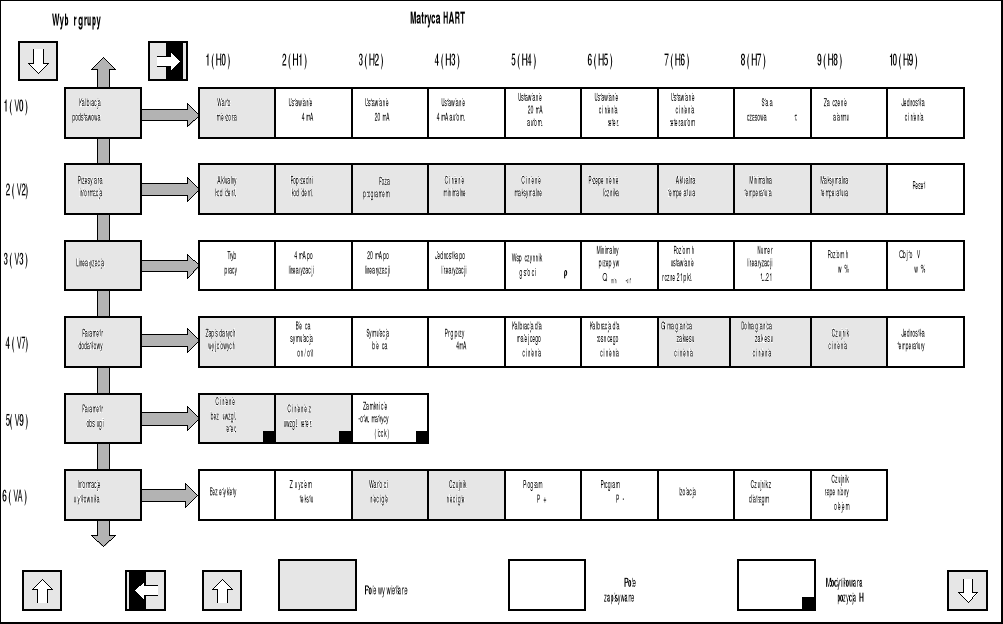
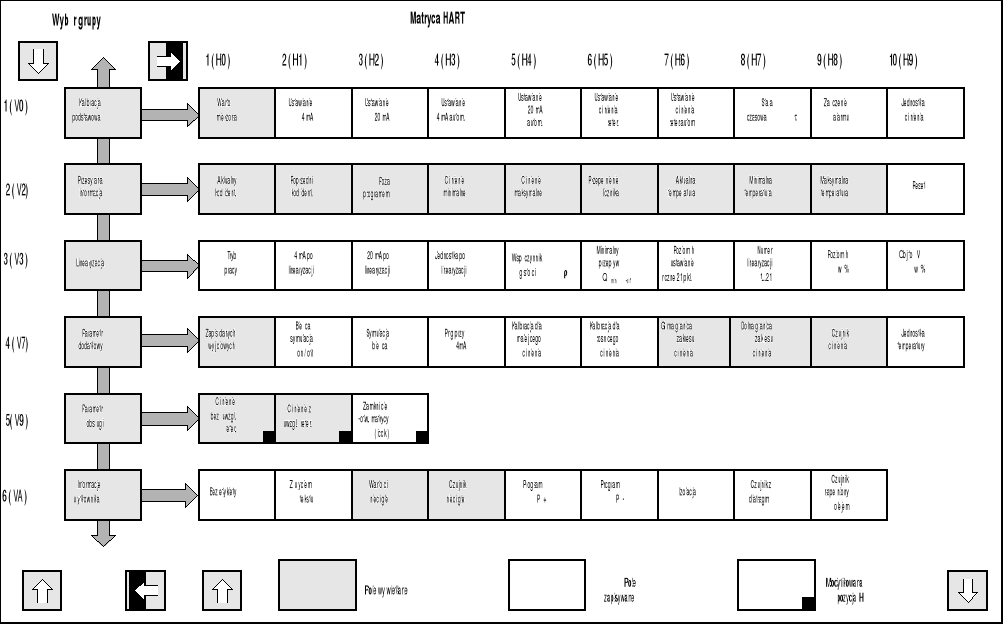
Rys.3. Matryca wyboru programowanych funkcji dla manometru „Deltabar S”.
Programowanie manometru „Deltabar S” do pomiaru ciśnienia różnicowego.
2.1. Przygotowanie manometru do pracy.
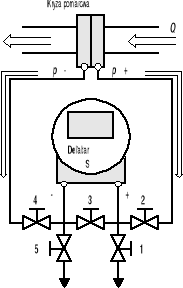
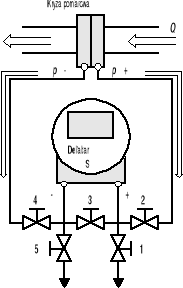
Pomijając czynności wstępne, które wykonane zostały podczas instalacji manometru należy przed czynnościami programowania przeprowadzić proces napełnienia przewodów ciśnieniowych manometru , a następnie ich odpowietrzenie w sposób przedstawiony na rys.4.
Rys.4. Proces przygotowania manometru do pracy.
2.2. Ustawienie warunków początkowych.
W tej fazie programowania ustala się podstawowe parametry zakresu pomiarowego. Należy ustalić wielkość wskazywaną na polu odczytowym wybierając na matrycy operacyjnej ( rys.3 ) grupę selekcyjną 1 (V0 ) i dalsze w tej grupie pola zaczynając od V0H0.
Dla ciśnienia zerowego wybierając pole matrycy V0H1 ( V0H3 ) - ustawia się zerowe wskazanie dla 4 mA przy ciśnieniu przenoszonym przez czujnik przyjętym jako zerowe.
Następnie wybierając pole V0H2 ( V0H4 ) ustala się wartość ciśnienia zakresowego dla prądu 20 mA . Kody pól podane w nawiasach odnoszą się do trybu automatycznego ustawiania parametrów zakresu pomiarowego przy nieznanej wartości ciśnienia początkowego.
Wykonanie operacji potwierdza się klawiszem „ENTER”.
2.2.1. Kalibracja zakresu pomiarowego przy znanej wartości ciśnienia odniesienia.
Ustawienie dolnej granicy pomiarowej i zerowego wskazania na wyświetlaczu dla prądu 4 mA: wybrane pole V0H3 - aktualne ciśnienie przenoszone przez czujnik przyjmowane jest jako zerowe i wybrane pole V0H6 ustawia „display” wartość „0”.
Ustawienie wartości zakresowej dla 20 mA : wybrane pole V0H4 powoduje, że ciśnienie na czujniku przyjmowane jest jako zakresowe.
Wybierając pole V3H0 liniową charakterystykę manometru.
Wybierając pole V0H1 można dla 4 mA wpisać żądaną wartość ciśnienia początkowego ( zero zakresu wskazań ) np. 10 mbar., następnie wybierając pole V0H2 wpisać wartość ciśnienia dla 20 mA ( wartość końcowa zakresu ) np. 100 mbar.
2.3. Ustawianie stałej czasowej τ .
Stałą czasową ustala się wprowadzając inercję I-go rzędu w torze przetwarzania sygnały z czujnika manometru ( rys.2 ). Wartość tej stałej ma wpływ na stabilność wyświetlanych wyników pomiaru na wyświetlaczu manometru gdy wybrane jest ustawienie producenta V0H0.
Aby ustawić stałą czasową należy wybrać pole matrycy V0H7 ( rys.3 ) - ( Damping ; τ = 0...40 s) i wpisać żądaną wartość np. 20 s. i potwierdzić klawiszem „ENTER”. Uwaga! Przy ustawianiu stałej czasowej przełącznikiem manometru można wybrać następujące wartości: τ = 0, 0.5, 1, 2, 4, 8 i 16 s.
2.4. Funkcja „RESET”.
Manometr różnicowy ma dwa rodzaje zerowania parametrów:
- reset standard - kod: „731” stosowany po wystąpieniu uszkodzenia przetwornika lub po stwierdzeniu jego błędnego działania. Wówczas ustalone zostaną współczynniki jak w tabeli 1.
Tabela 1.
Lp. |
Wartość współczynnika |
Opis ustawienia |
1 |
V0H1: 0.0 |
Ustawienie wartości 4 mA |
2 |
V0H2 = V7H7 ( V1H7 ) |
Ustawienie wartości 20 mA = Górna granica zakresu |
3 |
V0H5: 0.0 |
Ustawienie wartości ciśnienia bezwzględnego |
4 |
V0H7: 0.0 |
Stała czasowa dla sygnału wyjściowego |
5 |
V0H8: MAX |
Wybór zabezpieczenia ( alarm ) |
6 |
V7H3: OFF ( V1H3 ) |
Minimalna wartość wyj. odpowiadająca 4 mA |
7 |
V2H1: 0 |
Poprzedni kod rozpoznawczy |
8 |
V3H1: 0.0 |
Wyświetlacz ( Display ) dla 4 mA |
9 |
V3H2: 100.0 |
Wyświetlacz ( Display ) dla 20 mA |
10 |
V3H4;1.0 |
Współczynnik gęstości |
11 |
V3H: 0.0 |
Granica odcięcia dla minimalnego przepływu |
reset general - kod: „2380” stosowany po instalacji manometru lub dla wprowadzenia parametrów jak w tabeli 2.
Tabela 2.
Lp. |
Wartość współczynnika |
Opis ustawienia |
1 |
V2H3 = sygnał ciśnienia od czujnika |
Ciśnienie minimalne |
2 |
V2H4 = sygnał ciśnienia od czujnika |
Ciśnienie maksymalne |
3 |
V2H6: 0 |
Górny stan licznika wewnętrznego |
4 |
V2H7 = sygnał temperatury od czujnika |
Temperatura minimalna |
5 |
V2H8 = sygnał temperatury od czujnika |
Temperatura maksymalna |
6 |
VAH0 = „_ _ _ _ _ _ _” |
Punkt pomiarowy |
7 |
VAH1 = „_ _ _ _ _ _ _” |
Informacja tekstowa |
8 |
V3H5: 0.0 |
Granica odcięcia dla minimalnego przepływu |
2.5. Ustawienie jednostki pomiaru ciśnienia.
Należy wybrać jednostkę pomiarową według tabeli 3 i wpisać jej numer np. 0 [ mbar ] , 6 [mm H2O] w oknie dialogowym po uaktywnieniu wcześniej pola matrycy V0H9 .
Tabela 3.
Nr |
Jednostka |
Nr |
Jednostka |
Nr |
Jednostka |
Nr |
Jednostka |
Nr |
Jednostka |
0 |
mbar |
4 |
kPa |
8 |
in H20 |
12 |
kg / cm2 |
16 |
torr |
1 |
bar |
5 |
MPa |
9 |
ft H20 |
13 |
kgf / cm2 |
17 |
mm Hg |
2 |
Pa |
6 |
mm H20 |
10 |
psi |
14 |
atm |
18 |
in Hg |
4 |
hPa |
7 |
m H20 |
11 |
g / cm2 |
15 |
lb / ft2 |
|
|
2.6. Otwieranie i zamykanie matrycy HART.
Otwieranie matrycy następuje po wybraniu pola V9H9, operatora > Unlock wprowadzając kod „130”, a zamykanie po wybraniu pola V9H9 , operatora >Lockiong i wprowadzeniu nowego kodu np. „131”.
W przypadku pomiaru ciśnienia różnicowego występują liniowe zależności wskazań od mierzonego ciśnienia.
Wykorzystanie tak zaprogramowanego manometru do pomiaru przepływu za pomocą kryzy pomiarowej lub rurki spiętrzającej skutkuje nieliniową charakterystyką tak zbudowanego miernika przepływu ( podobnie może w pomiarach poziomu cieczy w zbiornikach ). Nieliniowość miernika przepływu utrudnia jego wykorzystanie do automatycznej regulacji procesów przemysłowych, w których mierzy się przepływ. W tym celu w manometrze „Deltabar S” przewidziano możliwość linearyzacji jego wskazań ( rys.2 ). W tabeli 4 zestawiono informacje dotyczące punktu pomiarowego dla pomiaru ciśnienia różnicowego.
Tabela 4.
L.p. |
Pole matrycy |
Wartość wyświetlana lub wprowadzana |
|
Wartość mierzona |
|
1 |
V0H0 |
Podstawowa wielkość mierzona |
2 |
V7H0 |
Prąd wyjściowy w [mA] |
3 |
V7H8 |
Ciśnienie czujnika w jednostkach wybranych w polu V0H9 |
|
Parametry czujnika |
|
4 |
V7H4 |
Kalibracja dla malejącego ciśnienia |
5 |
V7H5 |
Kalibracja dla rosnącego ciśnienia |
6 |
V7H6 |
Dolna granica ciśnienia w jednostkach wybranych w polu V0H9 |
7 |
V7H7 |
Górna granica ciśnienia w jednostkach wybranych w polu V0H9 |
8 |
V0H1 |
Dolna wartość zakresowa ( zero ) |
9 |
V0H2 |
Górna wartość zakresowa ( zakres ) |
10 |
V2H5 |
Przepełnienie licznika ( 0...255 ) |
11 |
V2H6 |
Temperatura przenoszona przez czujnik ( jednostki z V7H9 ) |
12 |
V9H7 |
Ciśnienie przed obciążeniem czujnika |
13 |
V9H8 |
Ciśnienie po obciążeniu czujnika |
|
Informacja o punkcie pomiarowym |
|
14 |
V2H2 |
Element czujnika i kod numerowy programu |
|
Postępowanie przy błędnym działaniu manometru |
|
15 |
V2H0 |
Wprowadzone na nowo kody rozpoznawcze i diagnostyczne |
16 |
V2H1 |
Poprzednie kody rozpoznawcze i diagnostyczne |
|
Punkty ekstremalne |
|
17 |
V2H3 |
Ciśnienie minimalne |
18 |
V2H4 |
Ciśnienie maksymalne |
19 |
V2H7 |
Temperatura minimalna |
20 |
V2H8 |
Temperatura maksymalna |
|
Jednostki wybrane odpowiednio w V0H9 i V7H9 |
|
|
Poziom komunikacji - rząd w matrycy „VA communication” |
|
21 |
VAH0 |
(Tag) nazwa zawierająca do 8 znaków ASCII |
22 |
VAH1 |
Tekst użytkownika |
23 |
VAH2 - VAH8 |
Informacje dotyczące programu |
Programowanie manometru „Deltabar S” do pomiaru przepływu przy użyciu kryzy lub rurki spiętrzającej.
Proces programowania manometru do pomiaru przepływu jest podobny jak w przypadku pomiaru ciśnienia z tym, że często może zachodzić konieczność linearyzacji wskazań wynikająca z nieliniowości przetwarzania przepływu na ciśnienie różnicowe. Ponadto konieczne może być uwzględnienie gęstości badanego medium. Także może być istotny dobór stałej czasowej w przypadku fluktuacji mierzonego przepływu. Jeśli manometr współpracujący z kryzą pomiarową lub rurką spiętrzającą przy pomiarach przepływu był zaprogramowany jako liniowy to uzyskuje się w tym przypadku nieliniową zależność jego wskazań od mierzonego przepływu.
Korzystając z wyjścia prądowego w przypadku gdy ciśnienie referencyjne jest bliskie zeru lub ciśnieniu zakresowemu prąd wyjściowy I manometru należy obliczać z zależności:
gdzie: p. - ciśnienie referencyjne,
p0 - ciśnienie odpowiadające zeru zakresu pomiarowego,
pZ - ciśnienie zakresowe.
Manometr różnicowy „Deltabar S” przewidziany jest przez producenta do pomiaru ciśnienia, poziomu cieczy w zbiorniku oraz do pomiaru przepływu kryzami normalnymi i rurkami spiętrzającym. Wybór typu kryzy lub rurki spiętrzającej z listy producenta pozwala uzyskać liniowe wskazania manometru w wybranych jednostkach przepływu. W innym przypadku należy przeprowadzić proces programowania linearyzacji wskazań. Można to uczynić metodą wzorcowania lub obliczeniową np. dla rurki spiętrzającej przyjmując charakterystykę paraboliczną i programując manometr w wybranych punktach tej charakterystyki ( do 21 punktów ) zależność pierwiastkową. Przy badaniu manometru „Deltabar S” jako przepływomierza należy brać pod uwagę następujące przypadki:
1 ) - manometr zaprogramowany jako liniowy miernik ciśnienia różnicowego,
2 ) - manometr zaprogramowany jako liniowy miernik przepływu;
a ) z kryzą normalną
b ) z rurką spiętrzającą Pitota
3 ) - manometr zaprogramowany jako liniowy miernik przepływu metodą pomiaru jego
charakterystyki, obliczeniu wartości punktów założonej charakterystyki liniowej
i wprowadzenia tych wartości do pamięci manometru,
4 ) - linearyzacja dla przyjętego zakresu pomiarowego na podstawie obliczonych wartości teoretycznej charakterystyki np. pierwiastkowej.
Programowanie manometru „Derltabar S” jako przepływomierza należy przeprowadzić dla wybranych kolejno grup modyfikowanych parametrów ( Matryca HART na rys.3 ).
V2H9 > Reset ;wpisać „2380”,
V0H7 > Stała czasowa τ = 0...40s ; wpisać wartość,
V0H9 > Jednostka pomiarowa; wpisać wybrać numer według. Tabeli 4,
V0H1 > Ustawienie dla 4 mA; wpisać wartość np. 0 mbar ,
V0H2 > Ustawienie dla 20 mA; wpisać wartość np. 100 mbar ,
V0H3 > kalibracja automatyczna dla 4 mA;
V0H4 > kalibracja automatyczna dla 20 mA;
Opcjonalnie do V0H3 wybrać V0H6 > kalibracja automatyczna dla ciśnienia referencyjnego ( 0 na polu odczytowym );
Alternatywnie do V0H6 wybrać V0H5 > kalibracja dla znanego ciśnienia referencyjnego ( 0 na polu odczytowym );
V3H0 > linearyzacja przepływu; wybrać flow ;
V3H1 > wprowadzenie wartości minimalnej > wyświetlanie dla 4 mA; wpisać 0;
V3H2 > wprowadzenie wartości maksymalnej > wyświetlanie dla 20 mA; wpisać wartość np. 30 [ m3/h ];
V3H3 > wybór jednostki pomiarowej dla odczytu np. m3/h; wybrać według tabeli 4.
Tabela 4.
Nr |
Jednostka |
Nr |
Jednostka |
Nr |
Jednostka |
Nr |
Jednostka |
Nr |
Jednostka |
0 |
% |
5 |
m3 /s |
10 |
USG /d |
15 |
t /min |
20 |
lb /h |
1 |
ft 3/min |
6 |
norm m3 /h |
11 |
g/min |
16 |
t /h |
21 |
specjal |
2 |
ft 3/h |
7 |
Std ft 3/min |
12 |
kg/s |
17 |
t /d |
|
|
3 |
l /s |
8 |
m3 /min |
13 |
kg/min |
18 |
lb /s |
|
|
4 |
ft 3/s |
9 |
USG /h |
14 |
kg/h |
19 |
lb /min |
|
|
V3H5 > histereza dla przepływu w [ % ] ( wartość praktyczna 3...6 % ); wpisać np.5 %; Enter,
V7H3 ( V1H3 ) >odcięcie dla 4 mA ( 3,8 mA OFF, 4 mA ON ) wpisać np. ON;
V0H8 > Błąd np. przekroczenie zakresu max 110 % = 22 mA; wpisać np. 110 %.
Po dokonaniu zmian lub akceptacji wcześniej ustawionych parametrów należy zamknąć matrycę operacyjną w sposób podany wcześniej w opisie procesu programowania ciśnieniomierza.
Orientacyjny program ćwiczenia
Przeprowadzić identyfikację przyrządów „IPP” na stanowisku laboratoryjnym.
Wybrać układ połączeń przyrządów do pracy w sieci ( ustawić odpowiednio przełączniki układów pracy ).
Uruchomić przetworniki pomiarowe i wykonać czynności napełniania i odpowietrzania.
Uruchomić program Commuwin II. i włączyć opcję komunikacji w protokóle HART.
Wybrać jeden z manometrów „Deltabar S” ( współpracujący z kryzą pomiarową lub rurką spiętrzającą ).
Opcjonalnie przeprowadzić pomiary przepływu dla manometru zaprogramowanego jako liniowy ciśnieniomierz lub przepływomierz linearyzowany teoretycznie . Zanotować wskazania pozostałych przepływomierzy. Przyjąć wskazania przepływomierza „Prowirl 77” ( opcjonalnie „Promag 33” ) jako wzorcowe.
Wykonać pomiary przepływu bez linearyzacji i z linearyzacją wskazań.
Przeprowadzić analizę błędów pomiaru przepływu w zbadanych przypadkach.
Wnioski z badań.
Uwaga! Zakres ćwiczenia ustala prowadzący ćwiczenie.
Nie wykonywać czynności programowania bez akceptacji prowadzącego ćwiczenie.
Opracował: Jan Leks
1
3
1
6
1
11
# |
Stan zaworów |
Opis sytuacji |
||||
|
1 |
2 |
3 |
4 |
5 |
|
1 |
O |
O |
O |
O |
O |
Dopływ wody do manometru |
2 |
Z |
O |
O |
O |
Z |
Odpowietrzanie dopływów |
3 |
O |
O |
O |
Z |
O |
|
4 |
Z |
O |
Z |
O |
O |
|
5 |
Z |
O |
O |
Z |
Z |
|
6 |
Z |
O |
Z |
O |
Z |
Gotowość do pracy |
Z - zawór zamknięty
O - zawór otwarty
Wyszukiwarka
Podobne podstrony:
Błędy graniczne przyrządów pomiarowych, Informatyka, Podstawy miernictwa, Laboratorium
Sprawdzenie przyrządów pomiarowych, Informatyka, Podstawy miernictwa, Laboratorium
Wzmacniacz pomiarowy[2], Informatyka, Podstawy miernictwa, Laboratorium
Podstawowa aparatura pomiarowa [2], Informatyka, Podstawy miernictwa, Laboratorium
Statystyczna analiza wyników pomiarów, Informatyka, Podstawy miernictwa, Laboratorium
Podstawowa aparatura pomiarowa, Informatyka, Podstawy miernictwa, Laboratorium
WZMACNIACZ POMIAROWY, Informatyka, Podstawy miernictwa, Laboratorium
Pomiary rezystancji [2], Informatyka, Podstawy miernictwa, Laboratorium
pom nap okr zm 1, Informatyka, Podstawy miernictwa, Laboratorium
pom mocy ukl trojfaz, Informatyka, Podstawy miernictwa, Laboratorium
pom czestot, Informatyka, Podstawy miernictwa, Laboratorium
WPROWAdzenie, Informatyka, Podstawy miernictwa, Laboratorium
pom nap okr zm a, Informatyka, Podstawy miernictwa, Laboratorium
Badanie parametrów kondensatorów i cewek, Informatyka, Podstawy miernictwa, Laboratorium
Identyfikacja właściwości dynamicznych termometrów elektrycznych, Informatyka, Podstawy miernictwa,
przetworniki CA, Informatyka, Podstawy miernictwa, Laboratorium
Badanie czujników ciśnienia, Informatyka, Podstawy miernictwa, Laboratorium
Inteligentne przyrzady pomiarowe, Księgozbiór, Studia, Elektronika i Elektrotechnika, Miernictwo
WSB-PEiM-jkf -2011, Informatyka, Podstawy miernictwa
więcej podobnych podstron