POLITECHNIKA ŚLĄSKA
Wydział :Mechaniczny - Technologiczny
Kierunek : Automatyka i Robotyka
Podstawy Konstrukcji Maszyn
Projekt manipulatora.
Wykonał:
.
.
Spis treści:
Założenia projektowo - konstrukcyjne.......................................................3
Opis istoty działania.........................................................................................3
Dane sytuacje...................................................................................................4
Dane ilościowe.................................................................................................4
Kryteria.............................................................................................................5
Zadania do wykonania.....................................................................................5
Warianty manipulatora................................................................................6
Dobór kryteriów..........................................................................................7
Ruch manipulatora......................................................................................8
Ruch poziomy..................................................................................................8
Ruch pionowy................................................................................................10
Opis cyklogramu.......................................................................................11
Czas efektywnej pracy..............................................................................12
Obliczenia ramienia manipulatora............................................................12
Obliczenia skoku siłownika...........................................................................12
Obliczenia reakcji podpory i siły działania siłownika ...................................13
Obliczenia wytrzymałościowe ramienia........................................................14
Obliczenia ugięcia ramienia...........................................................................16
Obliczenia dotyczące przegubu górnego.......................................................17
Dobór łożyska dla przegubu...........................................................................18
Obliczenia dotyczące słupa.......................................................................19
Wyboczenie....................................................................................................19
Smukłość........................................................................................................21
Zginanie..........................................................................................................21
Dobór łożysk tocznych .............................................................................24
Łożysko górne ...............................................................................................25
Łożysko dolne................................................................................................26
Obliczenia przegubu siłownika ................................................................26
Obliczenia śrub fundamentowych.............................................................28
Obliczenia połączenia spawanego.............................................................30
Obliczenia momentu napędowego............................................................34
Zestawienie wyników...............................................................................35
Cyklogram................................................................................................36
Założenia projektowo-konstrukcyjne.
Opis istoty działania.
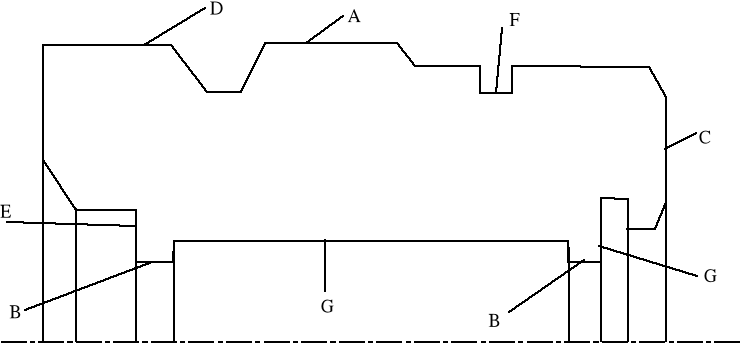
Przedmiotem manipulacji jest półfabrykat w postaci walca o średnicy d i wysokości h .
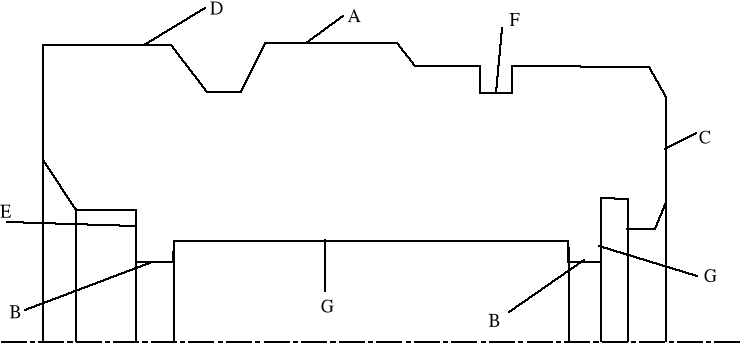
Przedmiot jest obrabiany na dwóch tokarko—frezarkach o osi pionowej sterowanych numerycznie. Jedna z nich posiada wrzeciono dolne, a druga górne. Czasy obróbki na poszczególnych stanowiskach wynoszą t1, t2, t3.
Konstruowany manipulator wykonuje następujące operacje:
uchwycenie walcowego półfabrykatu z podajnika
manipulacja przedmiotem
przemieszczenie obiektu przed uchwyt samo centrujący obrabiarki O1
wprowadzenie obiektu do uchwytu samo centrującego
obróbka powierzchni A,B,C na obrabiarce O1
uchwycenie obrabianego przedmiotu przez manipulator
zluzowanie szczęk uchwytu samo centrującego przez obrabiarkę O1
wysunięcie przedmiotu z uchwytu
manipulacja przedmiotem
przemieszczenie obiektu przed uchwyt samo centrujący obrabiarki O2
wprowadzenie obiektu do uchwytu samo centrującego
uchwycenie obrabianego przedmiotu przez obrabiarkę
obróbka powierzchni E,D
uchwycenie obrabianego przedmiotu przez manipulator
zluzowanie szczęk uchwytu samo centrującego przez obrabiarkę O2
wysunięcie przedmiotu z uchwytu
manipulacja przedmiotem
przemieszczenie obiektu przed uchwyt samo centrujący obrabiarki O1
wprowadzenie obiektu do uchwytu samo centrującego
uchwycenie obrabianego przedmiotu przez obrabiarkę
obróbka powierzchni F,G na O1
uchwycenie obrabianego przedmiotu przez manipulator
zluzowanie szczęk uchwytu
wysunięcie przedmiotu z uchwytu
manipulacja przedmiotem
wsunięcie obrabianego przedmiotu do odbiornika
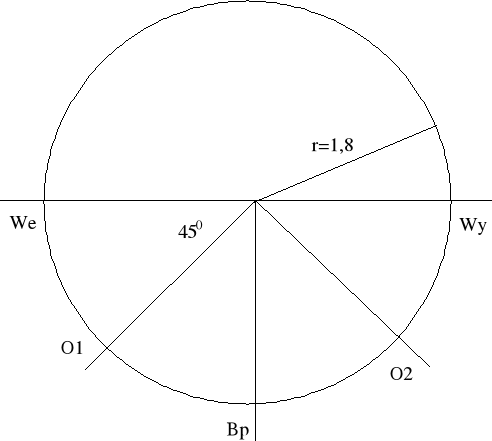
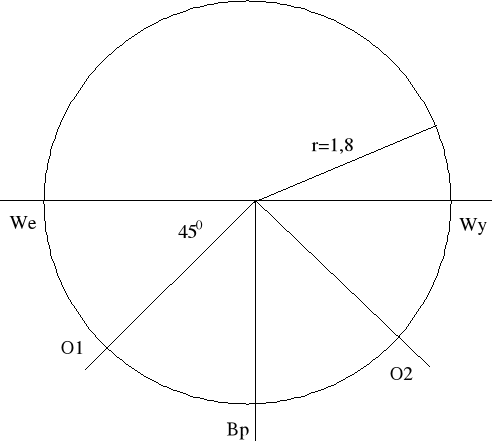
Dane sytuacyjne.
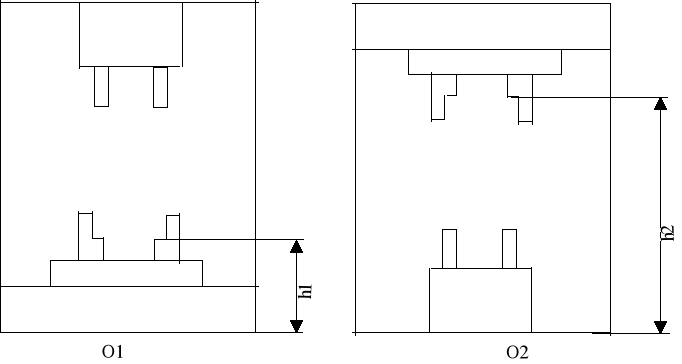
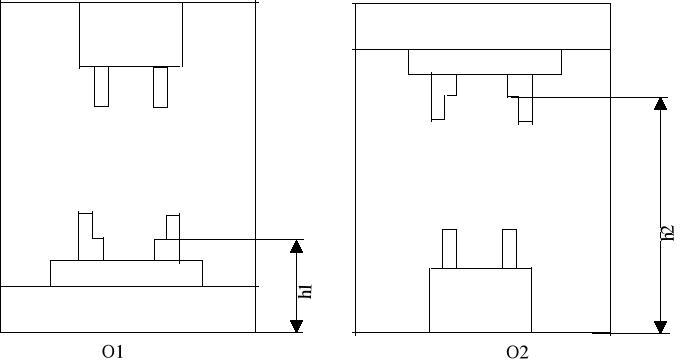
Obrabiarki mogą być usytuowane względem siebie w różny sposób. Obrabiarka O1 posiada uchwyt samo centrujący dolny na wysokości H1 obrabiarka O2 posiada uchwyt samo centrujący górny na wysokości H2
3. Dane ilościowe.
Wymiary półfabrykatu :
hmin ÷ hmax = 60-120 [mm]
dmin ÷ dmax = 80-100 [mm]
Masa chwytaka:
mch=3 [kg]
Czasy obróbki:
t1 = 36 [s]
t2 = 40 [s]
t3 = 45 [s]
Tworzywo półfabrykatu: St7
Średnica rozstawienia stanowisk w gnieździe:
D = 3,6 [m]
Wysokość położenia uchwytu od poziomu:
H1 = 400 [mm]
H2 = 800 [mm]
4. Kryteria.
Minimalna masa manipulatora .
Minimalna długość ruchów jałowych .
Minimalny czas postoju obrabiarek .
Prostota działania i wykonania manipulatora .
Modułowość mechanizmu obroyu i ruchu pionowego manipulatora.
Minimalny błąd pozycjonowania przedmiotu 0,2-1 mm
Duża sztywność układu .
Maksymalny stopień wykorzystania elementów znormalizowanych i typizowanych
Trwałość układów przegubowych > 20 000 godzin .
Zadania do wykonania.
analiza czasowo-ruchowa, kinematyczną w celu wykonania cyklogramu pracy gniazda .
analiza kinematyczna manipulatora
koncepcje napędów ruchów manipulatora wraz z napędami
dokonać wyboru koncepcji najlepiej spełniającej kryteria do realizacji w procesie projektowo—konstrukcyjnym
dobrać cechy konstrukcyjne układu realizującego ruch manipulatora
rysunek złożeniowy manipulatora oraz rysunek wykonawczy ustroju nośnego (słupa) manipulatora
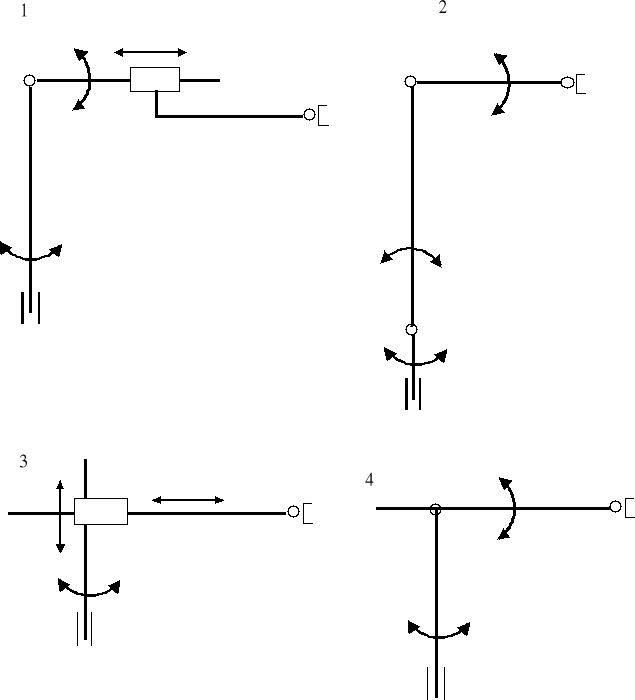
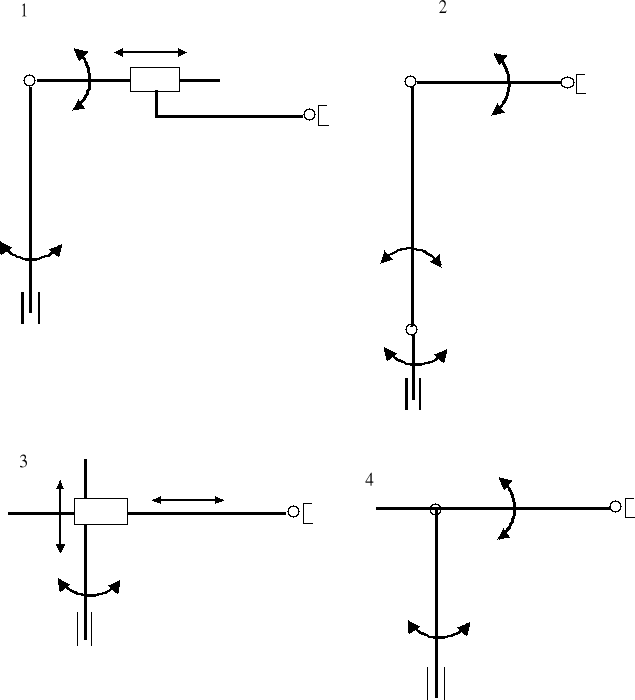
Warianty manipulatora.
Dobór kryteriów.
X |
K 1 |
K 2 |
K 3 |
K 4 |
K 5 |
K 6 |
K 7 |
K 8 |
K9 |
ΣKi |
W 1 |
W 2 |
W 3 |
W 4 |
K 1 |
X |
0 |
0,5 |
0 |
0 |
0,5 |
0 |
0,5 |
0 |
1,5 |
2 |
3 |
1 |
3 |
K 2 |
1 |
X |
0,5 |
0.5 |
0,5 |
1 |
0.5 |
1 |
0,5 |
5,5 |
2 |
3 |
2 |
3 |
K 3 |
0,5 |
0.5 |
X |
0,5 |
0 |
0,5 |
0 |
0.5 |
0 |
2,5 |
2 |
3 |
2 |
3 |
K 4 |
1 |
0.5 |
0,5 |
X |
1 |
0,5 |
0.5 |
1 |
0,5 |
5,5 |
1 |
3 |
1 |
4 |
K 5 |
1 |
0,5 |
1 |
0 |
X |
0.5 |
0,5 |
1 |
0,5 |
5 |
2 |
3 |
2 |
4 |
K 6 |
0,5 |
0 |
0,5 |
0,5 |
0.5 |
X |
0 |
0.5 |
0,5 |
3 |
3 |
3 |
4 |
3 |
K 7 |
1 |
0.5 |
1 |
0.5 |
0,5 |
1 |
X |
1 |
0,5 |
6 |
2 |
3 |
3 |
4 |
K8 |
0,5 |
0 |
0 |
0 |
0 |
0,5 |
0 |
X |
0 |
1,5 |
2 |
2 |
2 |
2 |
K9 |
1 |
0.5 |
0.5 |
0,5 |
0.5 |
0.5 |
0,5 |
1 |
X |
5,5 |
4 |
4 |
4 |
4 |
|
W1 |
W2 |
W3 |
W4 |
Ow |
80,5 |
112 |
88 |
128 |
w |
0,45 |
0,62 |
0,48 |
0,71 |
![]()
Do dalszych obliczeń wybieram wariant 4 ponieważ najlepiej spełnia zadane kryteria.
Ruch manipulatora.
Ruch poziomy.
v- prędkość średnia - przyjmuję 1 m/s
droga:
Swe - O1=2Πr450/3600= 0,7 m
SO1-O2=1,4 m
SO2-Wy=0,7 m
SO1-Bp=0,7 m
Czas:
T=s/v → twe-O1=0,7 s; tO1-Bp=tBp-O2=tO2-Wy=0,7 s
prędkość kątowa:
ω=v/r = 1/1,8 =0,5 [1/s]
prędkość obrotowa:
n=60ω/2Π = 4,7 [obr/min]
przyspieszenia liniowe;
![]()
an=ω2*r ; at=v/t
an=0,52*1,8=0,45 [m/s2]
atwe-O1=1,4 [m/s2]
aO1-O2=0,7 [m/s2]
aO1-wy=0,47 [m/s2]
atwe-O1=0,35 [m/s2]
a=1,6 [m/s2]
przyspieszenia kątowe:
ε
εtwe-O1=ω/twe-O1=1 [1/s2]
εO1-O2=0,35 [1/s2]
εO1-wy=0,23 [1/s2]
εtwe-O1=0,17 [1/s2]
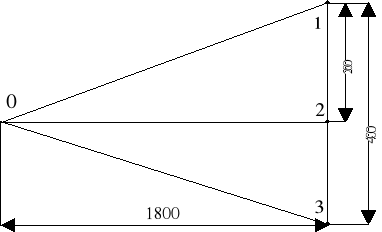
2. Ruch pionowy.
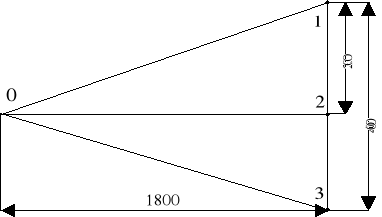
α=tg200/1800=6,30
2α=12,60
droga:
S2-1=2Πr*6,30/3600=0,21 m
S1-3=0,39 m
czas:
t2-1=0,25 [s]
t1-3=5 [s]
prędkość kątowa:
ω=v/r= 0,5 [/s]
prędkość obrotowa:
n= 4,7 [obr/min]
przyspieszenie liniowe:
an=0,45 [m/s2]
at2-1=5 [m/s2]
at1-3=2,5 [m/s2]
a=6,8 [m/s2]
przyspieszenia kątowe;
ε2-1=2,5 [1/s2]
ε1-3=0,125 [1/s2]
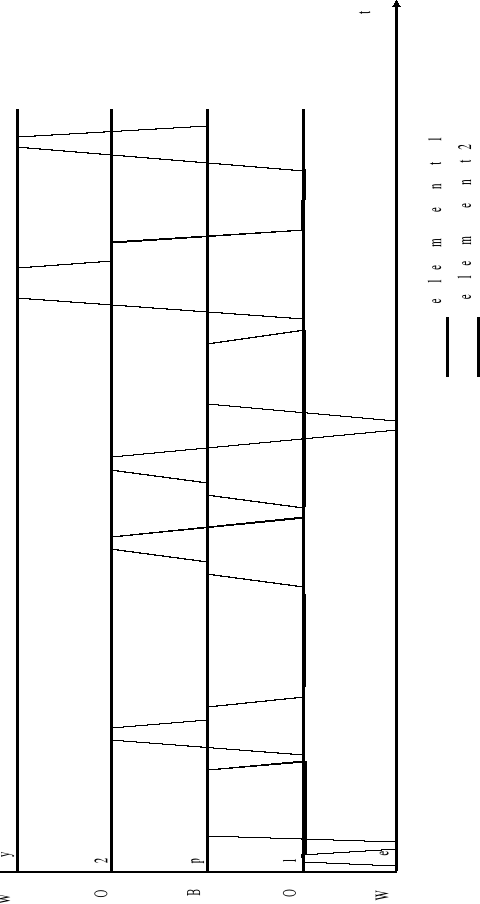
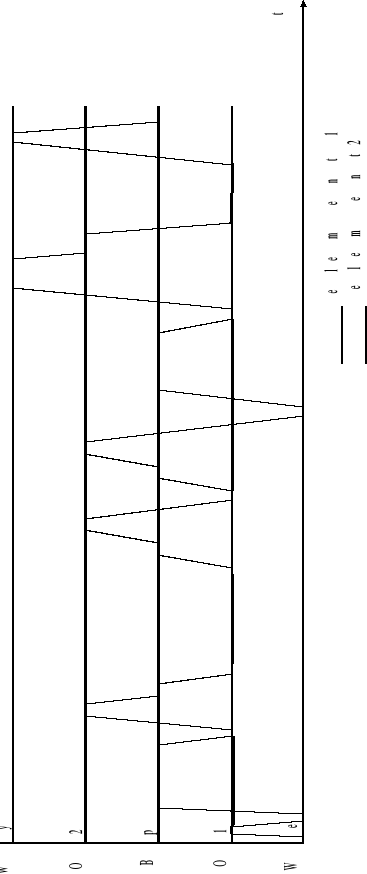
Opis cyklogramu.
pobranie przedmiotu 1
umocowanie przedmiotu w O1
pobranie przedmiotu 2
umieszczenie przedmiotu w bazie
zabranie przedmiotu 1 z O1 po obróbce
umieszczenie obiektu w O2
pobranie przedmiotu 2 z Bp
zamocowanie obiektu 2 w O1
pobranie przedmiotu z O1 po obróbce
odłożenie obiektu 2 do Bp
pobranie obiektu 1 z O2 po obróbce
zamocowanie przedmiotu w O1
Pobranie obiektu 2 z Bp
zamocowanie obiektu w O2
pobranie obiektu 3 z We
odłożenie obiektu do Bp
r. pobranie obiektu 1 z O1 po obróbce
odłożenie obiektu po obróbce do Wy
pobranie obiektu 2 z O2 po obróbce
zamocowanie obiektu w O1
pobranie obiektu z O1
odłożenie obiektu do Wy
pobranie obiektu z Bp
Czas efektywnej pracy.
tp-czas pracy obrabiarki
tc - czas trwania cyklu pracy
z - procentowe wykorzystanie czasu przez obrabiarkę
tc = 157 s ; z= tp/tc*100%
czas efektywnej pracy na obrabiarce O1:
zO1=104/157*100=66,2% tpO1=104 s
czas efektywnej pracy na obrabiarce O2:
zO2=72/157*100=45,8% tpO2=72 s
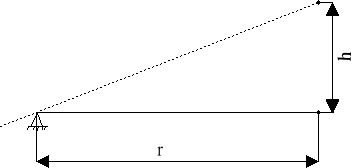
Obliczenia ramienia manipulatora.
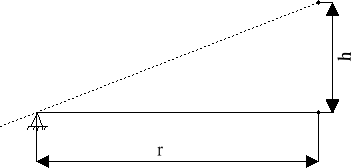
α=6,30
h=0,2 [m]
r=1,8 [m]
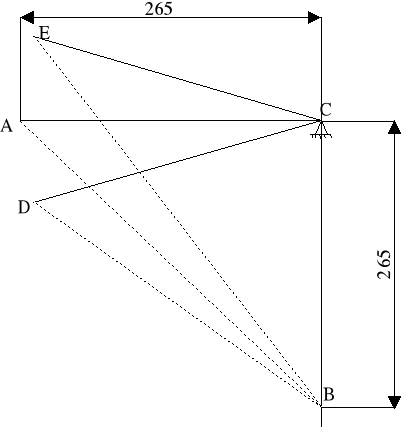
Obliczenia skoku siłownika;
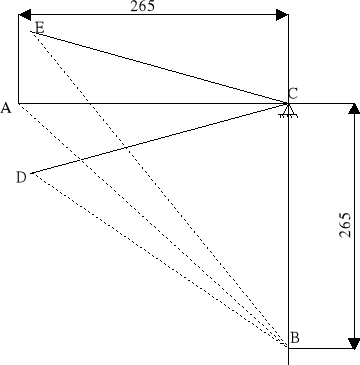
AB=374,76 ;β=83,70
z twierdzenia cos.:
![]()
BD=334,3 [mm]
![]()
EB=410,4 [mm]
Skok siłownika wynosi 76,15 [mm]
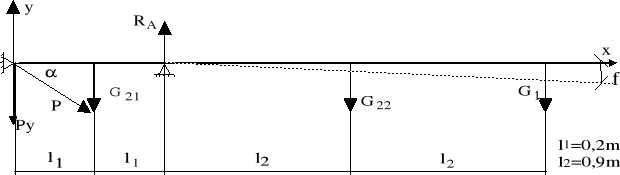
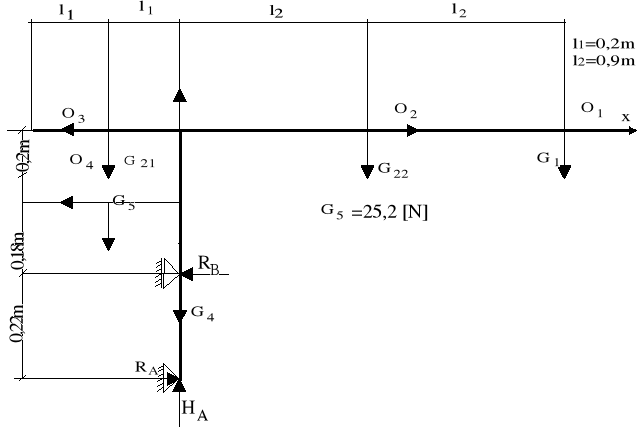
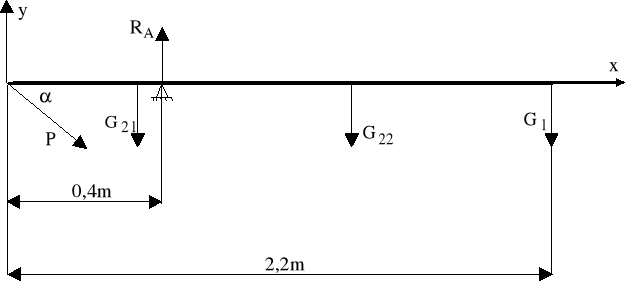
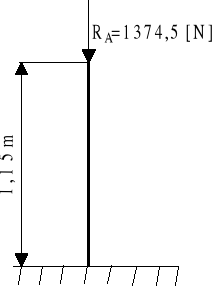
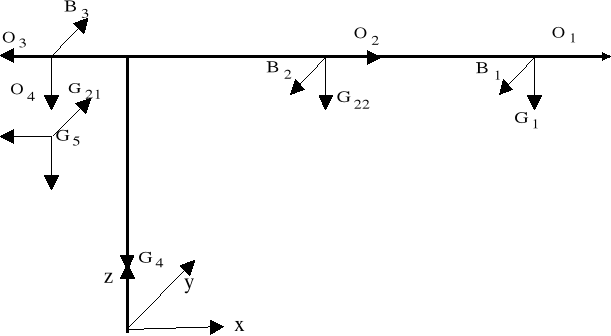
Obliczenia reakcji podpory i siły działania siłownika :
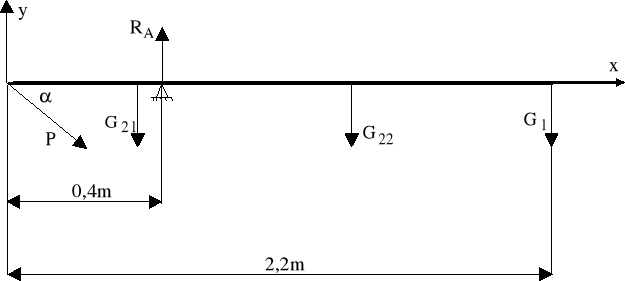
Wartość sił działających na ramię
G1- składa się z ciężaru elementu i chwytaka
G1=(mch+mp)g
Masa przedmiotu:
Element wykonany ze stali st7 ρ=7,8 [g/cm3]=7800 [kg/m3]
mp=ρ*Vp
Vp=Πd2/4*h
mp=1,8 [kg] ; masa chwytaka : mch=3 [kg]
G1=(3+1,8)9,81=47 [N]
G22 - masa ramienia
Ramię wykonano z ceownika C160
PN-71/H93451, masa - 18,8 [kg/m]
G22= 1,8*18,8*9,81=331,9 [N] - ciężar ramienia na długości 1.8 m.
G21=0,4*18,8*9,81=73,7 [N] - ciężar ramienia na długości 0,4 m.
Równania równowagi:
Oś y:
ΣFiy: -P sin450 - G21 + RA - G22 -G1 = 0
ΣMiA: P0,4 sin450 + G210,2 - G22 0,9 - G11,8 = 0
P = 1303,9 [N]
RA=1374,5 [N]
Na podstawie obliczeń dobieram siłownik typu DNU - SN - PPV - A o skoku 80 mm , sile wyciągu 1761 N, sile wciągu 1601 N i masie 2,5729 kg.
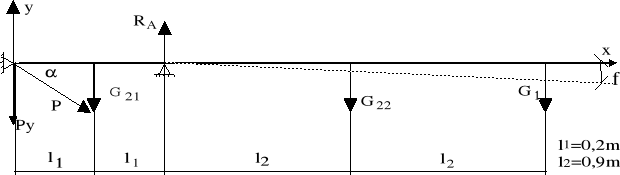
Obliczenia wytrzymałościowe ramienia .
Obliczenia wytrzymałościowe momentu gnącego .
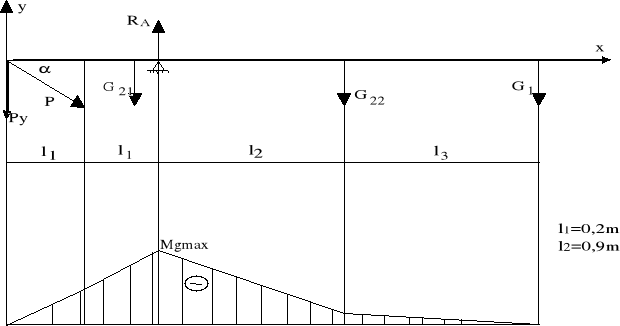
Py = 921,9 [N]
Dla 0<x<l1 dla 0 dla l1
Mg=-Pyx Mg=0 Mg=-Pyl1 = -184,3 [Nm]
Dla l1<x<2l1
Mg = - Pyx - G21 (x - l1)
dla x=l1 dla x=2l1
Mg = -184,3 [Nm] Mg = -383,5 [Nm]
Dla 2l1<x<2l1+l2
Mg = - Pyx - G21 (x - l1) + RA (x-2l1)
dla x=l1 dla x=2l1+l2
Mg = -383,5 [Nm] Mg = -42,4 [Nm]
Dla 2l1+l2<x<2l1+2l2
Mg = - Pyx - G21 (x - l1) + RA (x-2l1) - G22(x-2l1 - l2)
dla x=2l1+l2 dla x=2l1+2l2
Mg = -42,4 [Nm] Mg = 0 [Nm]
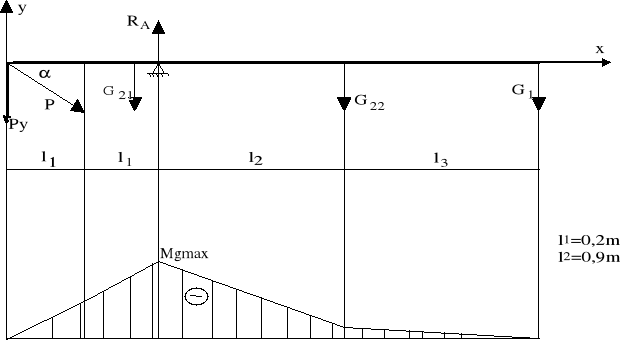
Maksymalny moment gnący wynosi
Mgmax= - 383,5 [N]
Z norm dobieram wartość W dla zadanego ceownika :
Wx = 1,16 * 10-4 [m3]
Wy = 1,83 * 10-5 [m3]
Dla stali st7 dopuszczalne naprężenia Kg0=65 [MPa]
Ceownik jest dobrze dobrany , jeżeli jest spełniona nierówność:
3,3 [MPa] <65 [MPa]
2,09 [MPa] < 65 [MPa]
wsp. bezpieczeństwa ≈ 3,5
Pomijam obliczenia ramienia związane z działaniem karbu w miejscu podparcia spowodowanego wykonaniem otworu ze względu na wysoką liczbę bezpieczeństwa .
Obliczenia ugięcia ramienia.
f- strzałka ugięcia
Mg(y) = P sinαx + G21(x-0.2) - RA(x-0.4) + G22(x-1.3)
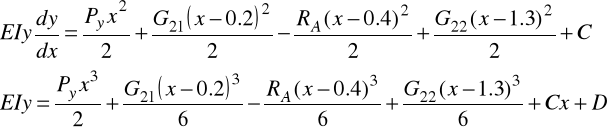
warunki:
x=0.4 y=0 ⇒ D=75.9
x=0 y=0 ⇒ C=-142,3
Obliczam ugięcie:
X=2 [m]
Y=1/EI*120,5
Y=6,5*10-4 [m] = 0,65 [mm]
Ramię zostało poprawnie dobrane ponieważ ugięcie mieści się w przedziale 0,2< y < 1 [mm].
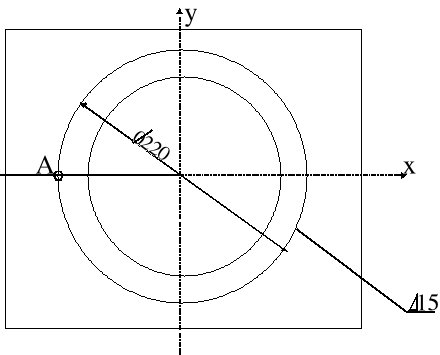
Obliczenia dotyczące przegubu górnego.
Ramię manipulatora będzie osadzone na osi ustalonej w łożyskach osadzonych w uchwycie który jest przyspawany do słupa..
Obliczam średnicę osi;
F r- siła reakcji ramienia
Fr=1374,5 [N]
F=2F
a=1.9 [m]
b=0,02 [m]
Maksymalny moment gnący :
Mgmax=0,5Fr*0,02=13,7 [Nm]
Dla stali st7 kg=200 [MPa]
Obliczam średnicę;
d=8,27*10-3
przyjmuję d=10 [mm]
Dobór łożyska dla przegubu.
P0=F=687,2 [N]
Dobieram współczynnik S0=2 odnoszący się do dużych wymagań bezproblemowej pracy przegubu.
C0=P0*S0
C0=2*687,2=1374,5 [N]
C0 - nośność spoczynkowa
Z katalogu dobieram łożysko kulkowe zwykłe 16002 PN - 85/N - 86100
gdzie:
C=4300 [N]
C0=2500 [N]
Weryfikacja łożyska ze względu na założone 20 tyś. godzin pracy;
dla łożysk kulkowych q=3
n= 31.8
L=22059,6 [h]
Łożysko spełnia założenia dotyczące ilości godzin pracy.
VIII. Obliczenia dotyczące słupa.
Wyboczenie.
Korzystając ze wzoru Eulera 
nw - współczynnik bezpieczeństwa (1,3-4) - przyjmuję nw = 4
Wyznaczam moment bezwładności :
I = 3,33*10-9 [m4]
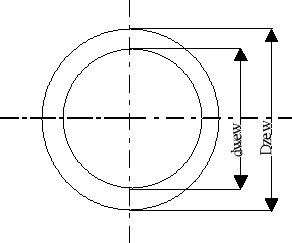
Przyjmuję przekrój rurowy słupa o wymiarach
Dzew=160 [mm] ; dwew =14g ; g=10 [mm]
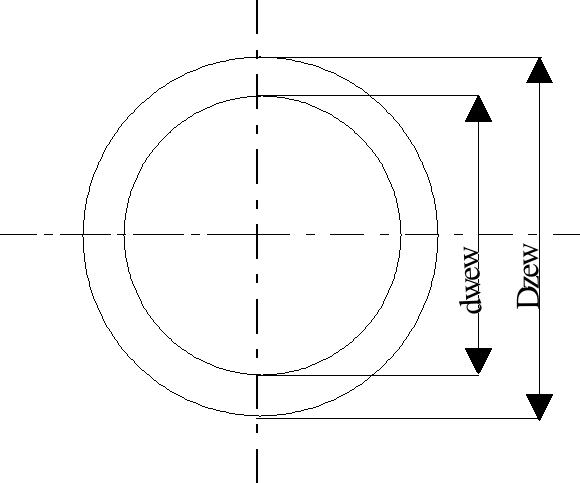
Moment bezwładności:
I=Π/64(Dzew4 - dwew4) = Π423,75g4
Przyrównując oba momenty otrzymuję:
g≥2,502 10-3[m]
warunek na wyboczenie jest spełniony dla g=10 [mm].
Smukłość.
λ>λgr
Rm=200 [MPa]
λgr=
λ=lr/i

s=Π/4*(dz2-dw2)= 4,71*10-3 [m]
s - pole przekroju
i - promień bezwładności

λ=lr/i = 1366,2
warunek λ>λgr jest spełniony.
Zginanie.
Obliczam siłę G4
G4=ρ*V*g
ρ=7800 [kg/m3]
V=Π/4*(0,162-0,142)
g-9.81
G4=414,5 [N]
Obliczam przyspieszenia punktów w miejscu przyłożenia sił.
amax=1,75 [m/s2]
a=1,75 [m/s2]
Na podstawie tw. Talesa :
a1 /2*0,9= a2 /0,9 → a2 = a1/2 = 0,875 [m/s2]
a3 /0,2= a2 /2*0,9 → 0,22 [m/s2]
a5 = a1 0,2/1,8 = 0,22 [m/s2]
Obliczam prędkości liniowe;
V1 = 0,628*1,75 = 1,09 [m/s]
V2 = 0,54 [m/s]
V3 = 0,138 [m/s]
V4 = 0,138 [m/s]
Obliczam siły odśrodkowe;
O1 = m1*V12 / 2l2 = 7,62 [N]
O2 = m2*V22 / l2 = 10,96 [N]
O3 = m3*V32 / l1 = 0,71 [N]
O5 = m5*V52 / l1 = 0,24 [N]
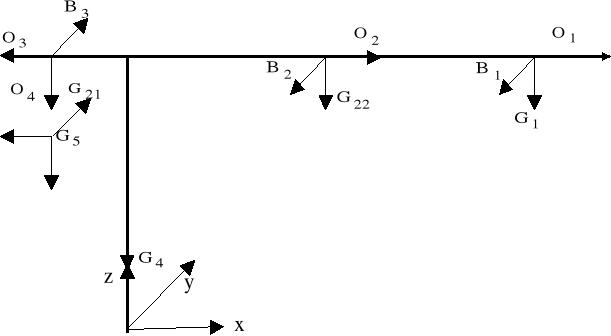
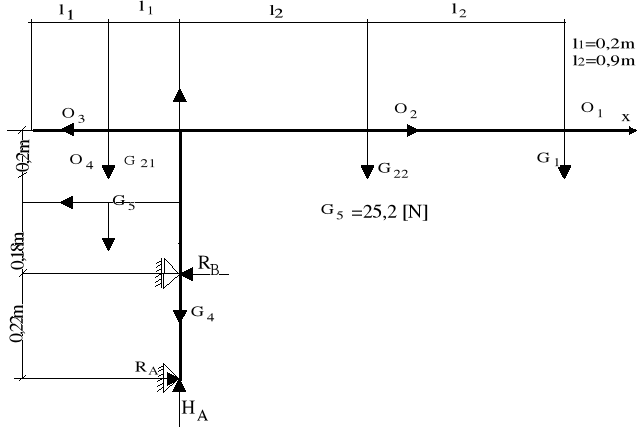
Równania równowagi;
ΣFix: HA - G4 -G3 - G21 -G22 -G1 -G5 = 0
ΣFiy: -RA +RB + O5 + O3 - O1 - O2 = 0
ΣMiA: RB0,22 + O3 0,6+G210,2 - O2 0,6 -G22 0,9- O 0,6 - G1 1,6 - MB + O5 0,4
+ G5 0,2 =0
Moment bezwładności ;
Iε = 7,85 * 10-9
Z równań równowagi:
HA=871/1 [N]
RB = 518.5 [N]
RA = 501 [N]
Obliczam maksymalny moment gnący:
Mg=RA*x 0 < X < 0,22
Dla x=0 Mg= 0
Dla x = 0,22 Mg = 325,5 [Nm]
Mg=RA*x + RB( x - 0,4) 0,22 < X < 0,6
Dla x=0,22 Mg= 325,5 [Nm]
Dla x = 0,6 Mg = 835,5 [Nm]
Obliczenia wytrzymałościowe na zginanie:
Wx = I/e I = Π/64 *(D4 - d4)
e=8g
D=16g
d=14g
Wx = Π53g3
dla stali st7 kg=200 [MPa]
g≥2,93*10-3 [m]
Grubość ścianki jest większa od obliczonej → została dobrana poprawnie.
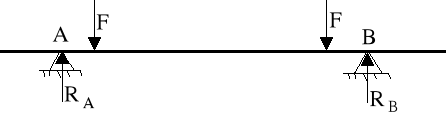
Dobór łożysk tocznych.
Na słupie osadzone będą dwa łożyska . Górne przenosi tylko obciążenia poprzeczne , dolne przenosi obciążenia wzdłużne i poprzeczne .
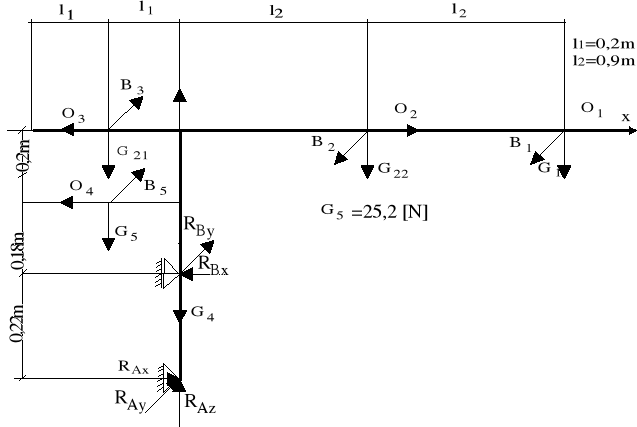
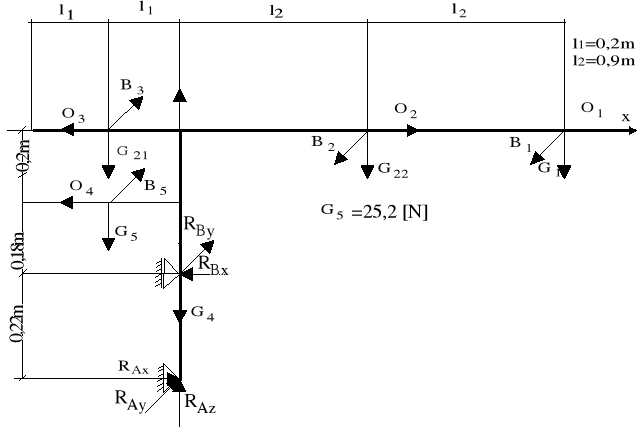
Równania równowagi;
ΣFix: RAx + RBx + O1 + O2 + O3 + O5 =0
ΣFiy: RAy + RBy + B3 + B5 +B2 - B1 =0
ΣFiz: RAz - G5 - G4 - G21 - G22 - G1 =0
ΣMix: RBy0,22 - B2 0,6 - B10,6 + B30,6 + B50,4 =0
ΣMiy: RBx0,22 + O20,6 + O10,6 - O30,6 - O50,4 + G11,8 + G220,9 - G210,2 -
G50,2 = 0
Obliczam siły bezwładności
B=m*a
B1 = m1* a1 = 11,21 [N]
B2 = m22* a2 = 26,2 [N]
B3 = m21* a3 = 1,65 [N]
B5 = m5* a5 = 0,56 [N]
Z równań równowagi:
RBx = -518 [N] RB = 519,5 [N]
RBy = 40,7 [N]
RAx = 535 [N]
RBy = 5,4 [N] RA = 1024 [N]
RAx = 873,2 [N]
Łożysko górne.
Obciążenie Fr = RB = 519,5 [N] P0 = Fr
Przyjmuję łożysko kulkowe S0 = 2
Nośność spoczynkowa:
C0 = 2*P0 = 1039 [N]
Dobieram łożysko kulkowe 61832
Gdzie: C0 = 4680 D = 200 , d = 160
C = 4600
Sprawdzenie warunku założonych 20 tyś godzin pracy:
q=3
n = 59,7 [obr/min]
L = 27162 [h]
Warunek jest spełniony.
Łożysko dolne.
Przyjmuję łożysko baryłkowe .
Obliczam obciążenie.
P0 = Fr + y0Fa
Fr = RA
FA = RAz
y0 = wsp. obciążeń statycznych .= 2.1
Po = 1024 + 2,1 * 873,2 = 2857,7 [N]
Nośność statyczna
S0 = 3,5
C0 = S0 * P0 =10002 [N]
Dobieram łożysko 23124W33;
C0 = 43700 [N] ; D = 200 ; d = =120 ; C = =64600 [N] q = 3,3
Sprawdzenie czy łożysko wytrzyma założone 20 tyś. godzin:
L = 137 151 [h]
Warunek jest spełniony.
Obliczenia przegubu siłownika.
Do połączenia siłownika z ramieniem stosuję połączenie sworzniowe . Sworzeń wykonany jest ze stali St6 ks= kt = 110 [MPa]
Warunek wytrzymałościowy :
Obliczam średnicę sworznia;
d≥3,78 * 10-3 [m]
przyjmuję d = 12 [mm]
łożysko ślizgowe dla sworznia :
dla st6 kgo = 65 [MPa] ; k0 = 6 [MPa]
λ = l/d = 
λ = 1,48
przyjmuję λ = 1,5
W otworze ucha znajduje się panewka łożyska .
Obliczam średnicę czopa.

d≥0,0117 [mm]
przyjmuję d= 12 [mm]
długość czopa:
l = λ * d = 1,5*12 = 18 [mm]
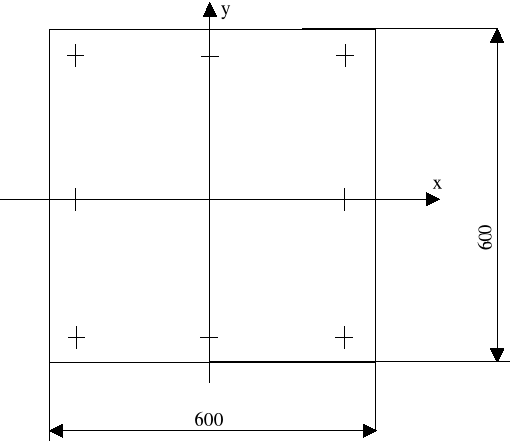
Obliczenia śrub fundamentowych.
Równania równowagi
ΣFix: O1 + O2 - O3 - O5 = Rx
ΣFiy: B3 - B2 - B1+ B5 = Ry
ΣFiz: - G5 - G4 - G21 - G22 - G1 = Rz
Mx =B10,6 + B2 0,6 - B30,6 - B50,4
My= O10,6 + O20,6 - O30,6 - O50,4 + G11,8 + G220,9 - G210,2 -G50,2
Mz= - B11,8 - B20,9 + B30,2 + B50,2
Z równań równowagi:
Rx=17,63
Ry=-35,32
Rz= -873,2
Mx= 40,73
My= 337
Mz= -38,5
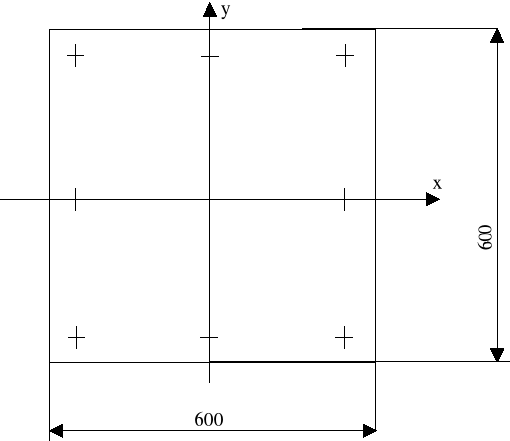
Obliczenia śrub fundamentowych;
σN=873,2/0,6 * 0,6 = 2425,5 [N]
σS=8Qw1/0,36
σMgx=40,73/5,87 * 10-4 = 69386,7
Wx= Ix'/ex
Ix = 0,6*0,63/12 = 0,0108
Ix' = 0,0108 + 0,35 (0,3)2 = 3,525 * 10-4
ex = 0,6
Wx = 5,87 * 10-4
Wy = Wx
σMgy = 574105,6
Qw1 ≥ (- 2425,5 + 547105,6 + 69386,7 )*0,3/8
Qw1 ≥ 288848

T = 39,4-108,9 = -69,5
W0= I0/e0 = 0,12728
I0' = 0,0216 + 0,09 * 0,36
I0' = 0,054
e0 = 0,4243
μ = 0,1
Qw2 = (-69,5 - 87,3)* 1/08
Qw2≥ -196
Przyjmuję śruby kl. 3,6
Re = 180 [MPa]
d≥ 14,2 [mm]
przyjmuję 8 śrub M16.
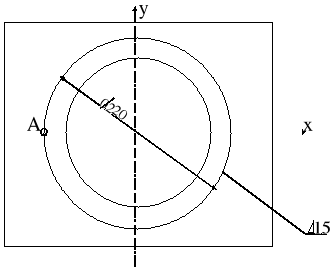
Obliczenia połączenia spawanego.
Obliczenia dotyczą spoiny pachwinowej o grubości 5 [mm].
Rx=17,63
Ry=-35,32
Rz= -873,2
Mx= 40,73
My= 337
Mz= -38,5
Obliczam wskaźnik wytrzymałości:
Ix = Uy = Π/64 (D4 - d4) = 2,23*10-5
ex = ey = D/2
Wx = Wy = Π/32 (S4 - d4/D) = 1,94*10-4
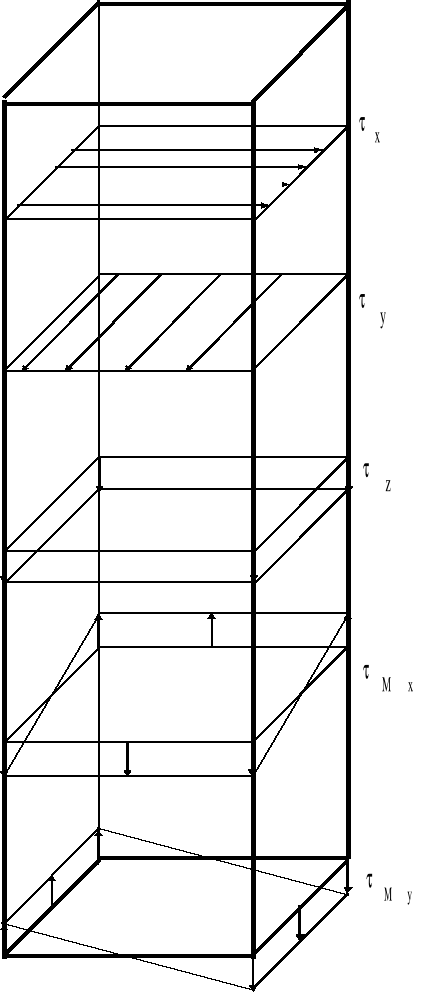
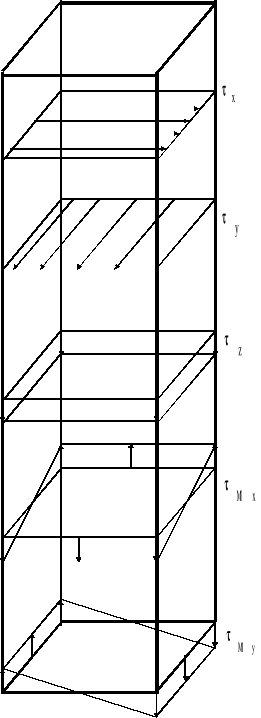
Obliczam naprężenia w spoinie:
τx = Rx/P
P = Π/4 (0,232- 0,222) = 3,53*10-3
τx = 4979,8
τy = -9987,8
τz = -236879,1
τMx = Mx/Wx
τMx = 173195,9
τMy = 1706185,6
τMz = -198453,6
Dla spoiny pachwinowej
τ ≤ SR 1,1
S = 0,8 ;R = 250 [MPa]
τ ≤1,1SR = 220 [MPa]
Maksymalnie jest obciążony punkt A i dla niego :
![]()
τA = 1,6425403 ≤ 220 [MPa]
Warunek wytrzymałościowy jest spełniony - spoina wytrzyma zadane obciążenia.
Rozkład naprężeń w spoinie:
Obliczenia momentu napędowego.
ΣMz: MB - B3 0,2 = B5 0,2 + B2 0,9 + B1 1,8 - Mn = 0
Mn = 38,6 [Nm]
Dobieram siłownik pneumatyczny obrotowy 11910 DSR - 16 - 180 - P
Zestawienie wyników.
Do obliczeń przyjęto wariant 4 .
Cykl pracy trwa 157 [s] i w tym czasie obrabiane są jednocześnie dwa przedmioty.
Dobrano siłownik typu DNU-SN -PPV-A o sile wyciągu 1761 [N] i sile wciągu 1601 [N], skok 80 [mm].
Ramię manipulatora wykonano z ceownika C160 wg PN-71 /H93451.
Ramię jest ustalone na osi o wymiarach φ10 i długości 202 [mm]
Oś jest ustalona w łożyskach tocznych 16002 kulkowych wg PN-85/M-86100.
Słup posiada przekrój rurowy o wymiarach D=160 [mm] , d= 14 [mm] , g= 10 [mm].
Siłownik połączony jest z ramieniem i słupem za pomocą sworznia o średnicy d=12 [mm].
Słup ustalony jest łożyskach : górnym -kulkowym 61832 D=200, d=160 ;
Dolnym - baryłkowym 23124W33 D=200 d= 120 .
Manipulator jest przytwierdzony do podłoża przy pomocy 8 śrub fundamentowych M16 .
Do połączenia dolnego korpusu ze słupem zewnętrznym w którym ustalone są łożyska zastosowano spoinę pachwinową o grubości 5 [mm] .
Do napędu słupa zastosowano siłownik pneumatyczny obrotowy 11910-DSR-16-180 -P.
1
2
Podstawy Konstrukcji Maszyn -projekt manipulatora.�
α
α
α
α
α
β

Wyszukiwarka