KATEDRA SYSTEMÓW WYTWARZANIA
Instytut Technologii Maszyn i Automatyzacji Produkcji
Politechniki Krakowskiej
Wm.
Laboratorium przedmiotu
„MASZYNY TECHNOLOGICZNE I ROBOTY”
„OBRABIARKI I ZAUTOMATYZOWANE SYSTEMY”
Studia Dzienne, Zaoczne, rok III, IV
Cwiczenie nr. 1
Temat ćwiczenia:
„Charakterystyka układów kinematycznych napędu i sterowania obrabiarek ogólnego przeznaczenia”
Cel i zakres ćwiczenia.
Celem ćwiczenia jest zapoznanie studentów ze sposobami opisu i analizy układów kinematycznych napędu i sterowania obrabiarek ogólnego przeznaczenia.
Sposób osiągnięcia założonego celu
Omówienie stosowanych znaków graficznych i oznaczeń uwzględnianych na schematach kinematycznych i schematach strukturalnych łańcuchów kinematycznych napędu i sterowania obrabiarek. Układ funkcjonalny i konstrukcyjny obrabiarek: układ geometryczny UG, układ kinematyczny kształtowania UkinKszt, układ kształtowania UKszt, układ roboczy UR, układ konstrukcyjny UKon obrabiarki. Klasyfikacja ruchów występujących w obrabiarkach. Podstawowy sposób obróbki wybranych działów obrabiarek. Przegląd typowych, ważniejszych przekładni i mechanizmów obrabiarek oraz ich schematy kinematyczne. Definicja i przykłady przełożenia łańcucha kinematycznego (przekładni, mechanizmów), ich równania równowagi kinematycznej rrk, Analiza schematów kinematycznych obrabiarek ogólnego przeznaczenia na przykładzie tokarki kłowej pociągowej, wiertarki kadłubowej lub promieniowej, frezarki wspornikowej, itp.:
opracowanie schematu strukturalnego napędu ruchu głównego i napędu ruchów posuwowych,
napisanie rrk. łańcuchów kinematycznych ww. napędów,
rozwiązanie wskazanego jednego z sześciu zadań analizy schematu kinematycznego z przekładnią planetarną (obiegową lub mechanizmem sumującym) - sprawdzian pisemny.
Środki, oprzyrządowanie, aparatura pomiarowo-kontrolna....
Schematy kinematyczne wybranych obrabiarek.
Zalecana literatura, pomoce
K. Paderewski - „Obrabiarki”. Wydawnictwa Szkolne i Pedagogiczne. Warszawa 1993,
L., T. Wrotny -„Obrabiarki skrawające do metali”. WNT, Warszawa 1974, 1978,..
Notatki z wykładów itp.
Prowadzący: dr inż. Longin Gondek
OBRABIARKI I ZAUTOMATYZOWANE SYSTEMY (OiZS)
Tematy sprawdzianów wiadomości z ćwiczenia nr. 1.
„Analiza budowy, działania i możliwości użytkowych obrabiarek do obróbki metali (na przykładzie konwencjonalnych obrabiarek ogólnego przeznaczenia)”
Podstawowy sposób obróbki tokarki, wiertarki, strugarki, frezarki....- sformułowanie oraz ilustracja graficzna (szkic, schemat) układu geometrycznego obrabiarki oraz jej ruchów podstawowych.
Opis układu roboczego (UR) tokarki kłowej pociągowej:
schemat strukturalny układu roboczego obrabiarki,
równania równowagi kinematycznej (rrk) napędu ruchu głównego i napędu ruchów posuwowych,
rrk kształtowania linii śrubowej gwintów metrycznych (M), modułowych (m), calowych (C) i diametral pitch (DP),
podstawowe zabiegi obróbkowe trokarek.
Opis układu roboczego (UR) frezarki wspornikowej
schemat strukturalny układu roboczego obrabiarki,
równania równowagi kinematycznej (rrk) napędu ruchu głównego i napędu ruchów posuwowych,
podstawowe zabiegi obróbkowe frezarek.
Opis układu roboczego (UR) wiertarki kadłubowej, promieniowej
schemat strukturalny układu roboczego obrabiarki,
równania równowagi kinematycznej (rrk) napędu ruchu głównego i napędu ruchów posuwowych,
podstawowe zabiegi obróbkowe wiertarek.
OBRABIARKI I ZAUTOMATYZOWANE SYSTEMY (OiZS)
Tematy sprawdzianów wiadomości z ćwiczenia nr. 1.
„Analiza budowy, działania i możliwości użytkowych obrabiarek do obróbki metali (na przykładzie konwencjonalnych obrabiarek ogólnego przeznaczenia)”
Podstawowy sposób obróbki tokarki, wiertarki, strugarki, frezarki....- sformułowanie oraz ilustracja graficzna (szkic, schemat) układu geometrycznego obrabiarki oraz jej ruchów podstawowych.
Opis układu roboczego (UR) tokarki kłowej pociągowej:
schemat strukturalny układu roboczego obrabiarki,
równania równowagi kinematycznej (rrk) napędu ruchu głównego i napędu ruchów posuwowych,
rrk kształtowania linii śrubowej gwintów metrycznych (M), modułowych (m), calowych (C) i diametral pitch (DP),
podstawowe zabiegi obróbkowe trokarek.
Opis układu roboczego (UR) frezarki wspornikowej
schemat strukturalny układu roboczego obrabiarki,
równania równowagi kinematycznej (rrk) napędu ruchu głównego i napędu ruchów posuwowych,
podstawowe zabiegi obróbkowe frezarek.
Opis układu roboczego (UR) wiertarki kadłubowej, promieniowej
schemat strukturalny układu roboczego obrabiarki,
równania równowagi kinematycznej (rrk) napędu ruchu głównego i napędu ruchów posuwowych,
podstawowe zabiegi obróbkowe wiertarek.
Katedra Systemów Wytwarzania ....................................................................
Instytut M-6 (NAZWISKO, IMIĘ - duże litery)
Laboratorium z przedmiotu: Gr...................................
OBRABIARKI I ZAUTOMATYZOWANE SYSTEMY (OiZS) dnia.................................
Sprawozdanie z ćwiczenia nr......na temat:
...........................................................................................................................................................
..........................................................................................................................................................
...........................................................................................................................................................
Wytyczne:
Podstawowy sposób obróbki obrabiarki....................................................................... i ważniejsze jej cechy techniczno-użytkowe.
Charakterystyka układu roboczego (układ geometryczny, kinematyczny kształtowania, układy napędowe, ruchy i parametry procesu roboczego - uproszczone rysunki szkice, schematy strukturalne, opis.
Charakterystyka ważniejszych możliwości obróbkowych (np.: sposoby toczenia powierzchni stożkowych, toczenia gwintów itp.) - uproszczone rysunki szkice, schematy strukturalne, opis.
Charakterystyka układu napędu i sterowania,..........(np.: równania równowagi kinematycznej, przełożenia określonych łańcuchów kinematycznych, przekładni, mechanizmów, schematy blokowe itp.)
Zestawienie i analiza wyników pomiarów (badań)........................................................................................
Wnioski.
Układ funkcjonalno-konstrukcyjny obrabiarki.
Istotne cechy funkcjonalno-konstrukcyjne obrabiarki mogą być ujęte w tzw. jej układach, które są zilustrowane, przedstawione na rys. 1.
UG - układ geometryczny
stanowią zespoły „prowadnicowe”, robocze ściśle rozmieszczone (usytuowane) w przestrzeni realizujące określone ruchy zasadnicze PO (przedmiotu obrabianego) i N (narzędzia) podczas trwania procesu skrawania,
wyznacza kierunki i tory ruchów kształtowania, a więc wpływa decydująco na proces kształtowania powierzchni obrabianych PO; ruchy realizujące linie charakterystyczne powierzchni I i II (okrąg O i prosta P - powierzchnie obrotowe grupy A, dwie proste PP, prosta P i okrąg O - powierzchnie płaskie grupy B, powierzchnie złożone - powierzchnie grupy C).
UKinKszt - układ kinematyczny kształtowania obrabiarki - złożone ruchy kształtowania uzyskuje się za pomocą układów kinematycznych kształtowania UKinKszt, do których zalicza się wewnętrzne łańcuchy kinematyczne (np. kształtowania linii śrubowej gwintów, obwiedniowego kształtowania ewolwentowego zarysu zęba kół zębatych...), układy kopiowe oraz elektroniczne układy serwonapędowe
Rys. 1. Układ funkcjonalno-konstrukcyjny obrabiarki
UKszt - układ kształtowania obrabiarki składa się zarówno z układu geometrycznego UG jak i układu kinematycznego kształtowania UkinKszt, jeżeli obrabiarka taki układ posiada; ![]()
. Jeżeli nie, to obrabiarka posiadając tylko układ geometryczny UG jako układ kształtowania Ukszt jest zarazem obrabiarką o prostych ruchach kształtowania: wiertarki, tokarki kłowe produkcyjne, frezarki, strugarki i dłutownice, szlifierki do wałków i otworów, itp... Podstawową rolę w układzie kształtowania obrabiarki stanowią pary kinematyczne zespołów (prowadnicowych), roboczych, ruchu obrotowego (zespoły wrzecionowe, ułożyskowane wrzeciona) i ruchu prostoliniowego (prowadnice - np. płaskie, „jaskółczy ogon” - zespołów suportów, sań, wsporników, wrzecienników), na których są mocowane PO i N,
UR - układ roboczy - jest to układ kinematyczny Ukin obrabiarki uzupełniony o wszystkie układy napędowe UN ruchu głównego i ruchów posuwowych zawierające źródła energii, a więc silniki; ![]()
, Układy napędowe oprócz silników zwykle zawierają układy przeniesienia ruchu, tzn. mechanizmy, łańcuchy kinematyczne napędowe,
UKon - układ konstrukcyjny obrabiarki - dla określonej konstrukcji obrabiarek, układ konstrukcyjny stanowi granice (wartości granicznych dolnych i górnych parametrów funkcjonalnych, i wskaźników eksploatacyjnych) wszelkich struktur (konstrukcyjnych) np.: geometrycznych, kinematycznych, dynamicznych, materiałowych itp. elementów, zespołów funkcjonalnych ZF jak i całej (zmontowanej, rozważanej) obrabiarki. Układ konstrukcyjny UKon stanowi układ roboczy UR uzupełniony o wszystkie zespoły i elementy funkcjonalne ZF; ![]()
, takie jak np.: część bazowa (korpus, kadłub, łoże,..), uchwyty i przyrządy PO i N, układ sterowania, układy pomiarowe, układ smarowania, blokady i zabezpieczenia, układu diagnostyczne, monitorowania i prognozowania itp.
Klasyfikacja ruchów w obrabiarkach.
Klasyfikacja ruchów występujących w obrabiarkach jest przedstawiona na rys. 2.
Rys. 2. Klasyfikacja ruchów występujących w obrabiarkach skrawających do metali.
Kształtowanie powierzchni obrabianej na obrabiarce skrawającej do metali może odbywać tylko przez te punkty ostrza N, które wchodzą w styczność z powierzchnią obrabianą, przy czym kontakt styczności może być liniowy lub punktowy, ciągły lub dyskretny. Teoretyczną powierzchnię obrabianą (nominalną) rozpatruje się jako zbiór linii charakterystycznych. Każda, taka powierzchnia może być utworzona jako ślad przestrzenny ruchu jednej, pierwszej linii I charakterystycznej (o stałym lub zmiennym zarysie) zwanej tworzącą, w sposób ciągły (stale) przemieszczanej (prowadzone) po drugiej II linii charakterystycznej, nieruchomej zwanej, kierownicą. Te linie charakterystyczne są śladami ruchu ostrza (ostrzy) N względem powierzchni obrabianego przedmiotu PO. Te ślady mogą być rzadziej lub gęściej rozmieszczone na obrabianej powierzchni rys. 3..
Rys. 3. Przykłady ilustracji powierzchni obrabianych, poprzez linie charakterystyczne I, II.
Przy istnieniu założenia: ruch główny - realizuje I linię charakterystyczną (tworzącą T), ruch posuwowy - realizuje II linię charakterystyczną (kierownicę) zgodnie z kierunkiem ruchu posuwowego, można wyróżnić metody kształtowania powierzchni na obrabiarkach. (uproszczona klasyfikacja):
z punktu widzenia tworzenia się linii charakterystycznych I i II przez krawędź skrawającą N, można uwzględnić dwa przypadki - tabela 1:
linia charakterystyczna I (tworząca T) stanowi ślad ciągły krawędzi N na powierzchni obrabianej i jest realizowana w sposób ciągły,
linia charakterystyczna I (tworząca T) stanowi ślad przerywany, „wielopunktowy”, (nieciągły) krawędzi N na powierzchni obrabianej i jest realizowana w sposób ciągły,
z punktu widzenia sposobu realizacji linii charakterystycznej I i II przez zespoły robocze, „prowadnicowe” PO i N obrabiarki; - metoda geometryczna, - metoda ruchów prostych, - metoda kopiowa, -metoda kinematyczna, - metoda numeryczna, K)
w zależności od charakteru styku (kontaktu materialnego) krawędzi skrawającej N z powierzchnią obrabianą PO (wg. Gwiazdowskiego „Kinematyka obrabiarek”, podział N; - kształtowe K, - punktowe P, - obwiedniowe O, występują różne sposoby realizacji II linii charakterystycznej.
Tabela. 1. Metody kształtowania powierzchni obrabianych na obrabiarkach skrawających do metali.
Realizacja II l. ch
Realizacja I l. ch.
a) |
c)
Rodzaj N
|
K N Kształtowe IIK |
P N Punktowe IIP |
O N Obwiedniowe IIO |
I.1 Ślad ciągły
|
|
I.1-IIK Ślad ciągły, liniowy, odwzorowanie (II l. ch) geometryczne krawędzi skrawającej N
METODA K1 (GEOMETRYCZNA) OBRÓBKI KSZTAŁTOWEJ
Toczenie, poprzeczne, struganie, dłutowanie kształtowe, przeciąganie, |
I.1-IIP Ślad ciągły, punktowy N na powierzchni PO.
METODA P1 RUCHÓW PROSTYCH - METODA OBRÓBKI „POSUWOWEJ”
Toczenie wzdłużne, kopiowe, struganie, dłutowanie, frezowanie czołem freza lub głowicy, |
I.1-IIO Ślad ciągły, punktowy N na powierzchni PO.
METODA O1 OBRÓBKI OBWIEDNIOWEJ
Toczenie obwiedniowe, struganie i dłutowanie obwiedniowe (np. uzębień kół zębatych,..) |
I.2 Ślad wielopunktowy
|
|
I.2-IIK
METODA K2 OBRÓBKI KSZTAŁTOWEJ „WIELO-OSTRZOWEJ”
Frezowanie, szlifowanie kształtowe, |
I.2-IIP
METODA P2 OBRÓBKI PRZESTRZENNEJ POWIERZCHNI ZŁOŻONYCH
Frezowanie i szlifowanie obwodem N, |
I.2-IIO
METODA O2 OBRÓBKI OBWIEDNIOWEJ „WIELO-OSTRZOWEJ”
Frezowanie, szlifowanie obwiedniowe „wielo-ostrzowe”, |
Ad. a) Wg. Gwiazdowskiego można wymienić 6-ść podstawowych metod kształtowania powierzchni obrabianych na obrabiarkach skrawających do metali - patrz tabela 1.:
K1 - obróbka N kształtowymi, których punkty krawędzi skrawających tworzą na powierzchni obrabianej ślad ciągły, ale liniowy (w kierunku prostopadłym do kierunku ruch głównego): I l. ch. - metoda śladu ciągłego, II l. ch. - metoda kształtowa,
K2 - obróbka N kształtowymi, których punkty krawędzi skrawających N wchodzą okresowo (na ograniczonej drodze w ruchu głównym i posuwowym) w styczność z PO, tworząc linię charakterystyczną jako ślad punktowy, wielopunktowy: I l. ch. - metoda śladu wielopunktowego, II l. ch. - metoda kształtowa,
P1 - obróbka narzędziami N punktowymi (wierzchołkami ostrza N - tzn. zakłada się że czynna część krawędzi skrawającej sprowadzona jest do punktu wierzchołkowego ostrza, noża) przy ciągłym styku (materialnym kontakcie) wierzchołka N z powierzchnią obrabianą PO: I l. ch. - metoda śladu ciągłego, jednopunktowego, II l. ch. - metoda śladu ruchu posuwowego (ciągłego i okresowego),
P2 - wieloostrzowa obróbka powierzchni złożonych (tzw. obróbka przestrzenna): I l. ch. Metoda śladu wielopunktowego, II l. ch. - metoda śladu wielopunktowego, punktowego,
O1 - obróbka obwiedniowa narzędziami obwiedniowymi: I l. ch. - metoda śladu ciągłego zgodnego z ruchem głównym, II l. ch. - jest realizowana jako ślad punktowy kolejnych położeń krawędzi skrawającej N na powierzchni obrabianej, podczas trwania złożonego ruchu „odtaczania”. Linia ta tylko teoretycznie jest odtwarzana w sposób ciągły, gdy praktycznie jest w efekcie obróbki obwiedniowej linią łamaną, złożoną z odcinków linii prostych lub krzywoliniowych,
O2 - obróbka obwiedniowa przy której obie linie charakterystyczne I i II są tworzone jako ślady punktowe, wielopunktowe.
Ad .b) Metody kształtowania powierzchni PO w zależności od sposobu realizowania linii charakterystycznych I i II przez elementy, zespoły robocze („prowadnicowe”, realizujące ruchu podstawowe skrawania PO i N) wg. I. M. Kuczery:
MG - Metody geometryczne - tory ruchów punktów odtwarzających linie charakterystyczne powierzchni obrabianych są określane jednoznacznie przez kształt i wzajemne położenie prowadnic, łożysk tych zespołów roboczych obrabiarki lub określonego przyrządu obróbkowego, które odpowiadają za tor ruchu głównego i posuwowego PO i N. Są to metody ruchów prostych przy toczeniu wzdłużnym, poprzecznym, struganiu, dłutowaniu itp.
MKop. - Metody kopiowe - pozwalają na odtworzenie na PO najczęściej jednej linii charakterystycznej (II l. ch., bardzo rzadko, obydwóch I i II l. ch.) na obrabianej powierzchni z analogicznego - lub wykonanego w odpowiedniej skali - zarysu wzorcowego (wzornika).
Mkin - metody kinematyczne polegają na odtwarzaniu na powierzchni obrabianej PO linii charakterystycznych (II l. ch.) - nie będących prostymi ani okręgami (kół) - w oparciu prawa kinematyki wg. Jednej z dwóch metod, reguł:
MkinZł - wypadkowy ruch kształtowania II linii charakterystycznej uzyskuje się przez dokładne złożenie dwóch lub więcej elementarnych ruchów (prostoliniowych lub obrotowych), powiązanych między sobą wg. określonej zależności matematycznej, nie będącej funkcją czasu, realizowanej za pomocą sprzężeń kinematycznych (za pomocą łańcuchów kinematycznych, mechanizmów).Np.: obróbka krzywek (II l. ch. Jako spirala Archimedesa) przez frezowanie, toczenie, szlifowanie itp.,; obróbka gwintów (II l. ch. jako linia śrubowa gwintu) w drodze toczenia na tokarce kłowej pociągowej, frezowanie i szlifowanie na frezarkach, szlifierkach do gwintów.
MkinMK - wypadkowy ruch odtwarzający II l. ch. na powierzchni obrabianej PO można uzyskać za pomocą odpowiedniego mechanizmu kierującego MK, którego określony punkt, z którym jest związane narzędzie N, opisuje z góry założoną linię (tor) itp.: eliptyczną, hypo lub epi cykloidalną itp.
Mkin - metody numeryczne kształtowania powierzchni obrabianych (II l. ch.) a ściślej metody numerycznego sterowania składowymi ruchami kształtowania - realizowanymi równocześnie przez określone zespoły robocze (prowadnicowe) - są stosowane przy obróbce różnego rodzaju powierzchni (najczęściej walcowych, niecylindrycznych, złożonych) na obrabiarkach ze sterowaniem numerycznym kształtowym SNKszt, w których jest brak sprzężeń kinematycznych, które są zastąpione przez układ sterowania numerycznego USN w oparciu o informacje liczbowe o geometrii (o kształcie i wymiarach) obrabianej powierzchni, zarysu, linii charakterystycznej, zadane w programie.
Analiza układu roboczego obrabiarki na przykładzie tokarki kłowej pociągowej.
Schemat strukturalny układu roboczego tokarki kłowej pociągowej średniej wielkości jest przedstawiony na rys. 4.
Rys. 4. Schemat strukturalny tokarki kłowej pociągowej średniej wielkości.
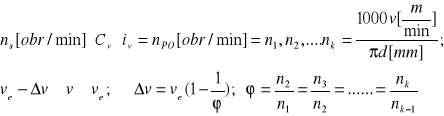
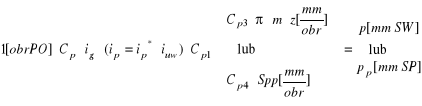
Użyte na tym schemacie oznaczenia, mają określone znaczenia: S - silnik asynchroniczny prądu przemiennego (indukcyjny, klatkowy, jednobiegowy); WR - wrzeciono, PO - przedmiot obrabiany, N - narzędzie; SN - suport narzędziowy, karetka; SP - suport poprzeczny; SW - suport wzdłużny, SS - skrzynka suportowa, zamkowa; Wp - wałek pociągowy; Sn - skok linii śrubowej kształtowanego gwintu; Sp - skok śruby pociągowej suportu wzdłużnego SW; Spp - skok śruby pociągowej suportu poprzecznego PP; ![]()
[obr/min] - prędkość znamionowa silnika; ![]()
- prędkości obrotowe ruchu głównego, PO ustopniowane wg. ciągu geometrycznego o ilorazie ![]()
; d[mm] - średnica obrotowej powierzchni obrabianej; p[mm/1obr PO], ![]()
[mm/1obr PO] - posuw wzdłużny i poprzeczny; ![]()
- stałe przełożenia w określonych łańcuchach kinematycznych, napędowych; 
- odpowiednie, wielowariantowe przełożenia skrzynek przekładniowych, a mianowicie; skrzynki prędkości, przekładni z kołami wymiennymi (przekładni gitarowej) w napędzie ruchów posuwowych, ![]()
skrzynki posuwów (![]()
skrzynki posuwów gwintowych SPG), ![]()
zespołu podstawowego SPG (stopniowanie arytmetyczne przełożeń), ![]()
przekładni zwielokratniającej (stopniowanie geometryczne ![]()
), 
przełożenie przekładni odwracającej (przy kształtowaniu linii śrubowej gwintów calowych C i „diametral pitch” DP, przekładnia ta zmienia kierunek przeniesienia ruchu przez zespół podstawowy SPG oraz zmienia układ jednostek metrycznych na calowy) itp.
Łańcuch kinematyczny łk- zbiór, szereg ogniw (członów) logicznie połączonych ze sobą w pary kinematyczne. Za nielogiczne połączenie ogniw uznaje się, gdy np.: ślimak jest napędzany przez ślimacznicę, gdy ruch prostoliniowy śruby ma wymusić ruch obrotowy nakrętki, gdy popychacz napędza krzywkę w mechanizmie krzywkowym itp.
Przełożenie i łańcucha kinematycznego, przekładni, mechanizmu (synonimowe określenia) - jest to stosunek parametrów kinematycznych ogniwa biernego do parametrów kinematycznych ogniwa czynnego. Dla ruchu jednostajnego, prostego (prostoliniowego lub obrotowego) parametrami kinematycznymi są droga (np. ![]()
w [m], w [mm], ![]()
w [rad], w [obr], itp.) i prędkość (w ![]()
w ![]()
itp.). Przełożenie, więc można wyrazić zależnością:
|
|
w której uwzględniono wariantowo przeniesienie ruchu obrotowego ![]()
, zamianę ruchu prostoliniowego na obrotowy ![]()
, zamianę ruch obrotowego na prostoliniowy ![]()
oraz prostoliniowego na prostoliniowy ![]()
. Jak widać, dla dwóch środkowych ww. przypadków przełożenie nie jest wielkością skalarną, gdy dla skrajnych przypadków - pierwszego i czwartego - przełożenia są skalarami.
Równanie równowagi kinematycznej łk stanowi przekształcenie równania na przełożenie ![]()
łańcucha kinematycznego (przekładni, mechanizmu), polegającego na pomnożeniu obydwu stron równania przez parametr kinematyczny ogniwa czynnego. Np.:
|
|
Przełożenie ![]()
może być określone przez określone wartości liczbowe parametrów konstrukcyjnych, geometrycznych takich jak: liczba zębów kół zębatych, moduły uzębienia lub uzwojenia, średnice kół pasowych, długości ramion dźwigni jedno lub dwuramiennej, jtp. Dla szeregowej struktury łańcucha kinematycznego przełożenie ![]()
jest iloczynem wszystkich, kolejnych, elementarnych par kinematycznych.
Podstawowy sposób obróbki działu tokarek. Tokarka jest to obrabiarka do obróbki powierzchni, przedmiotów obrotowych o obrotowym ruchu głównym przedmiotu obrabianego PO i prostoliniowych, zależnych ruchach posuwowych narzędzia N, przy toczeniu wzdłużnym i poprzecznym (patrz układ geometryczny obrabiarki UG - rys. ). Tokarka kłowa pociągowa posiada układ kinematyczny kształtowania linii śrubowej gwintów (metrycznych M, modułowych m, calowych C i diametral pitch DP) w postaci odpowiedniego łańcucha kinematycznego (więzi wewnętrznej) zawierającego wrzeciono WR oraz śrubę i nakrętkę Sp.
Analiza napędu ruchu głównego tokarki kłowej pociągowej (rys. 4) może być ograniczona do: równania równowagi kinematycznej rrk:
|
|
Analiza napędu ruchów posuwowych przy toczeniu wzdłużnym i poprzecznym (rys.4 ).
Równania równowagi kinematycznej rrk napędu ruchów posuwowych przy toczeniu wzdłużnym i poprzecznym można przedstawić:
|
|
Jak widać z powyższego rrk, dla toczenia wzdłużnego i poprzecznego posuwem jest to droga ruchu prostoliniowego ![]()
[mm] suportu wzdłużnego PW lub ![]()
[mm] suportu poprzecznego PP wyrażoną w milimetrach, w czasie trwania 1-nego obrotu wrzeciona WR, przedmiotu obrabianego PO. Ogniwem czynnym (pierwszym) w napędzie tych ruchów posuwowych jest obracające się wrzeciono.
Analiza układu kinematycznego kształtowania linii śrubowej toczonego gwintu.
Dalsze rozważania dotyczyć będą tzw. gwintów normalnych, to znaczy gwintów, znormalizowanych wartościach liczbowych skoków.
Układ liczbowy gwintów normalnych, którego podstawą jest wartość liczbowa parametru a, może być zilustrowany przykładowo za pomocą tabeli 2.
Uwzględniając przykład tabelarycznego zestawienia parametru a, jest oczywiste, że każdą wartość liczbową tego parametru a (w tabeli 2) ustala się poprzez:
wybranie wiersza (a więc wybranie jednej z liczb zasadniczego, liczbowego ciągu arytmetycznego 4,0; 4,5; 5,0; 5,5; itp. o różnicy 0,5)
i kolumny (poprzez wskazanie jednej z siedmiu liczb, w główce tabeli, od 1/8 do 8 stanowiących ciąg geometryczny o ilorazie ϕ=2. Każda liczba zasadniczego, arytmetycznego ciągu liczbowego może być „rozwinięta” w wierszu, w ciąg geometryczny o ilorazie ϕ=2 (mnożąc tą liczbę przez wartości liczbowe zawarte w główce tabeli 2.
Układ liczbowy skoków gwintów metrycznych ![]()
.
Wielkości liczbowe znormalizowanych skoków gwintów metrycznych określa zależność:
|
A więc tabela stanowi układ liczbowy skoków gwintów metrycznych.
Rrk łańcucha kształtowania lini śrubowej gwintów metrycznych, o skokach ![]()
normalnych.
Założenia:
kolejne przełożenia

zespołu podstawowego SPG są proporcjonalne do kolejnych wyrzów zasadniczego, arytmetycznego ciągu liczbowego gwintów (kolumna środkowa tabeli 2),kolejne przełożenia

są proporcjonalne do geometrycznego ciągu liczbowego w główce tabeli , o ilorazie
ϕ=2,gwint śruby pociągowej Sp suportu wzdłużnego jest gwintem metrycznym, itp.
Zgodnie ze schematem strukturalnym układu roboczego tokarki kłowej pociągowej (rys. 4) można napisać rrk kształtowania lini śrubowej gwintów metrycznych, normalnych:
|
|
Układ liczbowy skoków gwintów modułowych, normalnych ![]()
.
Wielkości liczbowe znormalizowanych skoków gwintów modułowych określa zależność:
|
A więc tabela stanowi układ liczbowy skoków gwintów modułowych pod warunkiem gdy każdą wartość liczbową parametru a pomnoży się przez liczbę π.
Rrk łańcucha kształtowania lini śrubowej gwintów modułowych, o skokach ![]()
normalnych.
Założenia jak wyżej, przy czym zamiast przekładni gitarowej o przełożeniu ![]()
należy zmontować przekładnię o przełożeniu uwzględniającą liczbę π, np.: ![]()
. Zgodnie ze schematem strukturalnym układu roboczego tokarki kłowej pociągowej (rys. 4) można napisać rrk kształtowania linii śrubowej gwintów modułowych, normalnych:
|
|
Układ liczbowy skoków gwintów calowych, normalnych ![]()
.
Wielkości liczbowe znormalizowanych skoków gwintów calowych określa zależność:
|
|
W odniesieniu do układu liczbowego gwintów zawartego w tabeli 2, układ liczbowy skoków gwintów calowych w [”] będzie odpowiadał tabeli 3. Zasadniczy ciąg liczbowy skoków gwintów calowych w calach, stanowią odwrotności kolejnych liczb arytmetycznego, zasadniczego ciągu liczbowego gwintów. Podobną prawidłowość obserwuje się dla liczb występujących w odpowiednich wierszach. Każda liczba zasadniczego - już nie arytmetycznego - ciągu liczbowego skoków gwintów calowych, może być „rozwinięta” w wierszu, w ciąg geometryczny o ilorazie ϕ=2 (mnożąc tą liczbę przez wartości liczbowe zawarte w główce tabeli 3.
Tabela 3. Przykład układu liczbowego skoków gwintów calowych w calach [”].
|
|
|
|
2 |
4 |
8 |
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
|
Itp. |
|
|
|
|
|
|
|
Rrk łańcucha kształtowania lini śrubowej gwintów calowych, o skokach ![]()
normalnych.
Założenia:
zgodnie ze schematem strukturalnym układu roboczego tokarki kłowej pociągowej (rys. 4) musi nastąpić zmiana kierunku przeniesienia ruchu obrotowego przez zespół podstawowy SPG, aby można było uzyskać w nim przełożenia odwrotne:

do tego służy przekładnia odwracająca, która oprócz tego pozwolić może na zmianę układu metrycznego na calowy dzięki określonemu jej przełożeniu

Można napisać rrk kształtowania lini śrubowej gwintów calowych, normalnych:
|
|

Przy założeniu ![]()
dla zależności (6) okazuje się, że równanie (10) jest odwrotnością stron równania (6).
Układ liczbowy skoków gwintów „diametral pitch”, normalnych ![]()
.
Wielkości liczbowe znormalizowanych skoków gwintów „diametral pitch” określa zależność:
|
|
Rrk łańcucha kinematycznego kształtowania linii śrubowej gruntów „diametral pitch”, o skokach znormalizowanych ![]()
.
Struktura połączeń w rozważanym łańcuchu kinematycznym jest identyczna jak dla kształtowania linii śrubowej gwintów calowych, z jednym wyjątkiem, a mianowicie przełożenie ![]()
musi uwzględniać liczbę ![]()
(identycznie jak dla gwintów modułowych. A więc rrk dla tych gwintów może być sformułowane następująco:
|
|

W podobny sposób można przeprowadzić analizę pozostałych obrabiarek ogólnego przeznaczenia.
RÓWNANIA RÓWNOWAGI KINEMATYCZNEJ (RRK) UKŁADÓW PODANYCH SCHEMATAMI KINEMATYCZNYMI.
Dla układu podanego schematem kinematycznym ........ (A lub B) i przykładowo ustalonych danych, założeń, zadań - I; II; III; IV; V; lub VI
1. narysować schemat strukturalny
2. opracować równania równowagi kinematycznej (rrk)
3. określić kierunek ruchu ogniwa biernego
Układ A.
Rys. 1. Schemat kinematyczny układu napędowego A.
Dane, założenia dla układu napędowego A.
Zadanie I.
Dane, założenia: 
Szukane: ![]()
Zadanie II.
Dane, założenia: 
Szukane: ![]()
Zadanie III.
Dane, założenia: 
Szukane: ![]()
Układ B.
Rys. 1. Schemat kinematyczny układu napędowego B.
Dane, założenia dla układu napędowego B.
Zadanie IV.
Dane, założenia: 
Szukane: ![]()
Zadanie V.
Dane, założenia: 
Szukane: ![]()
Zadanie VI.
Dane, założenia:
Szukane: ![]()
UKinKszt
UG
UKszt
UN
UR
ZF
UKon
Ruchy w obrabiarkach
Ruchy podstawowe
Ruchy przestawiania N wzgl. PO ( ruchy decyd. o kształcie i dokł. geometr, PO):
przesuwowe,
ustawcze,
podziałowe
Ruchy pomocnicze:
związane z PO (załadowczo-wyładowcze),
obsługowe,
sterowania, np. skrzynkam przekładnowym,
mocowania i odmocowania,
pomiarowe itp
Ruchy kształtowania powierzchni obrabianej (ruchy decyd o kszt. i dokł. geometr. powierzchni obrabianej) :
realiz. I l. ch.
realiz. II l. ch.
Ruchy decydujące o intensywności obróbki (Ruchy Skrawania):
ruch główny (decyd. o prędkości skrawania)
ruch posuwowy (decyd. o grubości warstwy skrawanej)
Tabela 2. Przykład układu liczbowego gwintów normalnych a.
|
|
|
|
2 |
4 |
8 |
0,5 |
1,0 |
2,0 |
4,0 |
8,0 |
16 |
32 |
0,5625 |
1,125 |
2,25 |
4,5 |
9 |
18 |
36 |
0,625 |
1,250 |
2,5 |
5,0 |
10 |
20 |
40 |
|
|
|
5,5 |
|
|
|
|
|
|
6,0 |
|
|
|
|
|
|
6,5 |
|
|
|
|
|
|
7,0 |
|
|
|
|
|
|
7,5 |
|
|
|
Wyszukiwarka