POLITECHNIKA WROCŁAWSKA
WYDZIAŁ BUDOWNICTWA LĄD. I WOD.
ZAKŁAD DYNAMIKI BUDOWLI
ĆWICZENIE PROJEKTOWE
Z
DYNAMIKI BUDOWLI
ROK AKAD. 1998/99 TOMASZ RZODKIEWICZ
GR 4 ROK III
ZADANIE : Dla schematu ramy złożonej z pryzmatycznych prętów prostych rozwiązać zagadnienie
własne oraz sporządzić obwiednię dynamicznych momentów zginających. Pominąć wpływ tłumienia oraz odkształcalności osiowej prętów i odkształcalności osiowej prętów i odkształcalności postaciowej.
Zastosować metodę przemieszczeń w wersji komputerowej.
EI=const.
2m p =1,1ω1
4m
Biegunowy moment bezwładności obrotowej masy tarczy względem środka masy :
![]()
Wielkości porównawcze : l , m , EJ , F0
Współrzędne uogólnione :
nh = e - 3t = 5 - 3 = 2
ng = nr + nt = 6+ 2 = 8
nd = 3
ngd = ng - nd = 8-3 = 5
( 5 współrzędnych nadliczbowych )
Współrzędne lokalne :
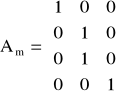
Wyznaczenie macierzy transformacji Am :
Stan q1 = 1
u1 = 1
u2 = 0
u3 = 0
u4 = 0
u5 = 0
Stan q2 = 1
u1 = 0
u2 = ![]()
u3 = 1
u4 = 0
u5 = 0
Stan q3 = 1
u1 = 0
u2 = 0
u3 = 0
u4 = 1
u5 = 0
Macierz transformacji :
Diagonalna macierz mas:
{m} = diag ( 2,2,![]()
,4 )
Wyznaczenie macierzy bezwładności :
Sposób - B = AmT*{m}*Am
{m}*Am = 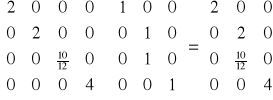
AmT =
AmT*{m}*Am=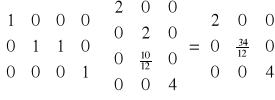
B = 
Sposób Ek =
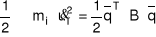
Ek = ![]()
![]()
B = 
=
Wyznaczenie macierzy sztywności :
Schemat wyjściowy i podział na elementy :
l1 = 5
l2 = 3,5
l3 = 2,5
l4 = 4
l5 = ![]()
3,60555
Stan q1 = 1
Ψ34 = ![]()
Ψ5,6 = -![]()
M34 = M43 = ![]()
M56 = M65 = ![]()
Stan q2 = 1
ϕ4 = 1
ϕ5 = 1
M43 = ![]()
M34 = ![]()
M56 =![]()
M65 = ![]()
Stan q3 = 1
Ψ12 = ![]()
Ψ34 = ![]()
M12 = M21 = ![]()
M56 = M65 = ![]()
Stan X1 = 1
ϕ8 = 1
M87 = ![]()
M78 = ![]()
Stan X2 = 1
ϕ6 = 1
ϕ7 = 1
ϕ9 = 1
M78 = ![]()
M87 = ![]()
M65 = ![]()
M56 = ![]()
M10,9 = ![]()
M9,10 = ![]()
Stan X3 = 1
ϕ10 = 1
M9,10 = ![]()
M10,9 = ![]()
Stan X4 = 1
ϕ3 = 1
ϕ2 = 1
M12 = ![]()
M21 = ![]()
M34 = ![]()
M21 = ![]()
Stan X5 = 1
ϕ1 = 1
M12 = ![]()
M21 = ![]()
Macierze transformacji przemieszczeń uogólnionych na przemieszczenia lokalne elementu.
![]()
; ![]()
; αL,P = ϕ - Ψ
q1 q2 q3 X1 X2 X3 X4 X5
1 0 0 -0,33333 0 0 0 0 1
A1 =
2 0 0 -0,33333 0 0 0 1 0
3 -0,28571 0 -0,28571 0 0 0 1 0
A2 =
4 -0,28571 1 -0,28571 0 0 0 0 0
5 0,4 1 0 0 0 0 0 0
A3 =
6 0,4 0 0 0 1 0 0 0
7 0 0 0 0 1 0 0 0
A4 =
8 0 0 0 1 0 0 0 0
9 0 0 0 0 1 0 0 0
A1 =
10 0 0 0 0 0 1 0 0
Wyznaczenie macierzy sztywności.
Wyniki obliczeń uzyskane z programu :
macierz transformacji Axq= - Kxx_1 Kxq
Axq[1,1] = 1.5084612473E-01 Axq[1,2] = 1.2570510394E-01 Axq[1,3] = 0.0000000000E+00 Axq[2,1] = -3.0169224946E-01 Axq[2,2] = -2.5141020789E-01
Axq[2,3] = 0.0000000000E+00
Axq[3,1] = 1.5084612473E-01
Axq[3,2] = 1.2570510394E-01
Axq[3,3] = 0.0000000000E+00
Axq[4,1] = 2.8102622951E-01
Axq[4,2] = -3.2786885246E-01
Axq[4,3] = 3.9577918033E-01
Axq[5,1] = -1.4051311475E-01
Axq[5,2] = 1.6393442623E-01
Axq[5,3] = 3.0210540984E-01
macierz sztywnosci K = Kqq - Kqx Kxx_1 Kxq :
K[1,1] = 6.2060699052E-01 K[1,2] = 3.8944404586E-01 K[1,3] = 8.6026866152E-02 K[2,1] = 3.8944404586E-01 K[2,2] = 2.3543753466E+00
K[2,3] = -2.6362903981E-01
K[3,1] = 8.6026866153E-02
K[3,2] = -2.6362903981E-01
K[3,3] = 7.3537154984E-02
Rozwiązanie zagadnienia własnego z wykorzystaniem macierzy sztywności K.
Bq + Kq = 0 q = ωq
( K - ω2B )*q = 0 ω2 = λ
( K - λ*B )*q = 0
Warunek niezerowego rozwiązania ( q ≠ 0 ):
det ( K - λB ) = 0
Wyniki obliczeń :
lambda[1]= 3.3061700209E-03 lambda[2]= 2.7305477874E-01 lambda[3]= 8.8328381747E-01
omega [1]= 5.7499304526E-02 omega [2]= 5.2254643692E-01 omega [3]= 9.3983180276E-01
Wektory własne :
macierz własna W :
w[1,1]=-2.3630874433E-01 w[2,1]= 1.5166604639E-01 w[3,1]= 1.0000000000E+00 w[1,2]= 1.0000000000E+00 w[2,2]=-2.2267595432E-01 w[3,2]= 1.4207644766E-01 w[1,3]= 3.3474507352E-01 w[2,3]= 1.0000000000E+00
w[3,3]=-6.7878395806E-02
macierz własna w bazie poszerzonej :
wq[1,1]=-2.3630874433E-01 wq[2,1]= 1.5166604639E-01 wq[3,1]= 1.0000000000E+00 wx[1,1]=-1.6581062196E-02 wx[2,1]= 3.3162124392E-02 wx[3,1]=-1.6581062196E-02 wx[4,1]= 2.7964365232E-01
wx[5,1]= 3.6017317384E-01
wq[1,2]= 1.0000000000E+00
wq[2,2]=-2.2267595432E-01
wq[3,2]= 1.4207644766E-01
wx[1,2]= 1.2285462075E-01
wx[2,2]=-2.4570924150E-01
wx[3,2]= 1.2285462075E-01
wx[4,2]= 4.1026563912E-01
wx[5,2]=-1.3409530611E-01
wq[1,3]= 3.3474507352E-01
wq[2,3]= 1.0000000000E+00
wq[3,3]=-6.7878395806E-02
wx[1,3]= 1.7620010106E-01
wx[2,3]=-3.5240020211E-01
wx[3,3]= 1.7620010106E-01
wx[4,3]=-2.6066156245E-01
wx[5,3]= 9.6391922716E-02
Kontrola ortogonalności wektorów własnych.
macierz WT*K*W = {ko}
k0[1,1]= 1.3809401289E-02 k0[2,1]= 2.8421709430E-14 k0[3,1]= 5.0661697060E-12 k0[1,2]= 5.1159076975E-13 k0[2,2]= 6.0651810727E-01 k0[3,2]=-3.4425795548E-12 k0[1,3]= 4.8672177400E-12
k0[2,3]=-3.1654678878E-12
k0[3,3]= 2.7168648134E+00
macierz WTBW = {bo}
b0[1,1]= 4.1768575726E+00 b0[2,1]=-3.6379788071E-12 b0[3,1]= 1.3642420527E-12 b0[1,2]=-3.6379788071E-12 b0[2,2]= 2.2212323478E+00 b0[3,2]=-1.9895196601E-12 b0[1,3]= 1.3642420527E-12
b0[2,3]=-1.9895196601E-12
b0[3,3]= 3.0758684350E+00
-2.3630874433E-01 1.0000000000E+00 3.3474507352E-01 q1
1.5166604639E-01 -2.2267595432E-01 1.0000000000E+00 q2
1.0000000000E+00 1.4207644766E-01 -6.7878395806E-02 q3
W= -1.6581062196E-02 1.2285462075E-01 1.7620010106E-01 X1
3.3162124392E-02 -2.4570924150E-01 -3.5240020211E-01 X2
-1.6581062196E-02 1.2285462075E-01 1.7620010106E-01 X3
2.7964365232E-01 4.1026563912E-01 -2.6066156245E-01 X4
3.6017317384E-01 -1.3409530611E-01 9.6391922716E-02 X5
Formy własne :
1 forma
2 forma
3 forma
Wektor sił wzbudzających ( obciążeń zewnętrznych ) F(t) = Fssin(pt) + Fccos(pt)
p = 1,1ω1 = 1,1*0,05749930= 0,063249
sposób ( z wykorzystaniem macierzy Am )
Praca jaką wykonuje F0 na przemieszczeniach lokalnych:
L = -1*cos(pt)*u1 + 1*sin(pt)*u2
F(t) = Fssin(pt) + Fccos(pt)
sposób ( metoda bezpośrednia )
Równanie pracy w miejscu zaczepienia tarczy :
L = -sin(pt)*q1 + cos(pt)*l*q2
stąd :
Drgania wymuszone harmoniczne. ( z wykorzyst. macierzy K )
Równanie ruchu :
Bq + Cq + Kq = F q = -p2q
![]()
gdy pomijamy tłumienie , otrzymamy :
( K - p2B )qs = Fs
( K - p2B )qc = Fc
stąd :
qs =( K - p2B )-1*Fs
qc =( K - p2B )-1*Fc
Rozwiązanie :
czesc sinusowa qs[1]= 1.7542094658E+01 qs[2]=-1.2110437590E+01
qs[3]=-8.1719316550E+01
xs[1]= 1.1238131828E+00
xs[2]=-2.2476263656E+00
xs[3]= 1.1238131828E+00
xs[4]=-2.3442380126E+01
xs[5]=-2.9138059615E+01
czesc kosinusowa
qc[1]= 1.2110437590E+01
qc[2]=-7.4796231362E+00
qc[3]=-5.2379374855E+01
xc[1]= 8.8658577545E-01
xc[2]=-1.7731715509E+00
xc[3]= 8.8658577545E-01
xc[4]=-1.4874979978E+01
xc[5]=-1.8751935542E+01
Wartości momentów przywęzłowych Ms, Mc
Ms[1]= 2.9103830457E-11 Mc[1]= 2.9103830457E-11
Ms[2]= 2.2782717956E+00 Mc[2]= 1.5507822254E+00
Ms[3]=-2.2782717956E+00 Mc[3]=-1.5507822254E+00
Ms[4]= 4.1971239395E+00 Mc[4]= 2.6751359700E+00
Ms[5]=-4.3343903646E+00 Mc[5]=-1.7599141723E+00
Ms[6]= 3.5558586148E+00 Mc[6]= 2.8052470959E+00
Ms[7]=-1.6857197742E+00 Mc[7]=-1.3298786632E+00
Ms[8]= 0.0000000000E+00 Mc[8]=-1.8189894035E-12
Ms[9]=-1.8701388406E+00 Mc[9]=-1.4753684327E+00
Ms[10]= 0.0000000000E+00 Mc[10]=-1.8189894035E-12
Wykresy momentów.
Ms
Mc
Amplituda momentów
amM = ![]()
pkt |
am M |
1 |
0,00000 |
2 |
2,75598 |
|
2,75598 |
4 |
4,97717 |
5 |
4,67806 |
6 |
4,52919 |
7 |
2,14714 |
8 |
0,00000 |
9 |
2,38205 |
10 |
0,00000 |
Sprawdzenie równowagi momentów gnących w przekroju zamocowania tarczy masowej.
Fs = Fo*sin(pt)
Fc = Fo*cos(pt)
Siły bezwładności :
B1 = -2m*u1 = 2mp2u1
B2 = 2m*u2 = 2mp2u2
B3 = -J0*u3 = ![]()
ml2*p2*u3 = 0,83333ml2*p2*u3
u1 = q1
u2 = q2
u3 = q2
stąd :
B1 = 2mp2q1
B2 = 2mp2q2
B3 = 0,8333ml2*p2*q2
Częstość wymuszenia :
p = 0,063249 ![]()
qs = 
qc = 
M4s = 4,19712 M4c = 2,67514
M5s = -4,33439 M5c = -1,75991
Skoki w wykresach :
ΔMs = B2*l + B3 = 2mp2q2s *l + 0,83333*ml2p2q2s =
= 2*(0,063249)2*(-12,11044) + 0,83333*(0,063249)2*(-12,11044) =
= -0,13727
ΔMc = B2*l + B3 + Fs*l= 2mp2(q2c)*l + 0,83333*ml2p2q2c +1*l =
= 2*(0,063249)2*(-7,47962) + 0,83333*(0,063249)2*(-52,37937)+1 =
= 0,91522
Kontrola :
Ms
ΣM = - 4,19712 + 4,33439 - 0,13727 = 0,00000
Mc
ΣM = -2,67514 + 1,75991 +0,91522 = - 0,00001
14
Wyszukiwarka
Podobne podstrony:
Pytania z Dynamiki, wszystko, sem. V, Dynamika budowli, Egzaminy
Ćwiczenie projektowe z Organizacji Produkcji Budowlanej, █► BUDOWLANE
Dynamika Budowli wyklad 4 2011 12
Bryja, dynamika budowli, opracowane zagadnienia
dynamika budowli lista zadan pdb cw6
dynamika budowli lista zadan pdb cw7
dynamika budowli skrypt PG
37 Projektowanie wyrobów stolarki budowlanej
FB Strona tytulowa projektu, PWR, Fizyka budowli projekt, FB P
5 umowa o prace projektowe, Architektura i budownictwo, Budowlane, prawo budolwane
dynamika budowli lista zadan pdb cw4
dynamika budowli lista zadan pdb cw3
Dynamika Budowli wyklad 2 2011 Nieznany
UMOWA O WYKONANIE PRAC PROJEKTOWYCH, Umowy protokoły budowlanka
Projekt - całyczesc 2, Fizyka Budowli - WSTiP, fizyka budowli(4), fizyka budowli, Fizyka Budowli, Kl
Projektowanie składu betonu na podporę mostu, Projekt Technologia robÄ‚lt budowlanych[1], 1
Fizyka Budowli-projekt, fizyka budowli- projekt autocad, Fizyka budowli
projekt magda, Fizyka Budowli - WSTiP, fizyka budowli(5), fizyka budowli, Nowy folder, fizyka budowl
projekt (4), =====STUDIA, Fizyka Budowli - WSTiP
więcej podobnych podstron