Wydział Elektryczny
|
Ćwiczenie nr 6 Temat: Badanie silnika krokowego. |
|
Politechnika Poznańska Instytut Elektrotechniki Przemysłowej |
Laboratorium Elektrycznych Maszynowych Elementów Automatyki.
|
Rok Akademicki: 1997/98 |
Wykonujący ćwiczenie:
|
Data wykonania ćwiczenia:
Data oddania sprawozdania:
|
Zaliczenie: |
1. Cel ćwiczenia:
Celem ćwiczenia było wyznaczenie charakterystyki granicznej oraz charakterystyk mechanicznych silnika krokowego.
2. Schemat stanowiska:
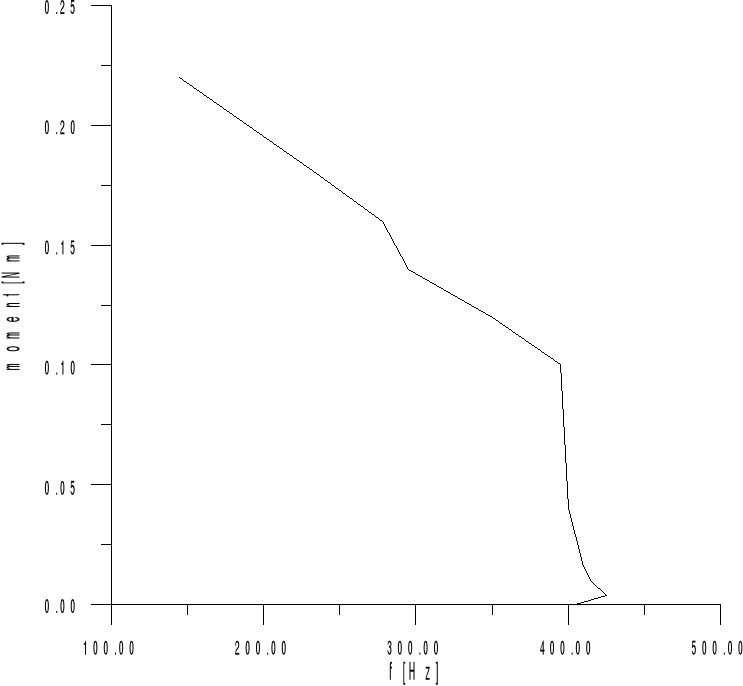
3. Charakterystyka graniczna:
- warunki pomiarów
napięcie zasilające UZ = 4V
ramię obciążenia r = 20 mm
- pomiary
lp. |
ciężar |
częstotliwość |
moment obciążenia |
[-] |
g |
Hz |
Nm |
1 |
0 |
405 |
0.000 |
2 |
20 |
425 |
0.004 |
3 |
50 |
415 |
0.010 |
4 |
80 |
410 |
0.016 |
5 |
200 |
400 |
0.040 |
6 |
500 |
395 |
0.100 |
7 |
600 |
350 |
0.120 |
8 |
700 |
295 |
0.140 |
9 |
800 |
278 |
0.160 |
10 |
900 |
235 |
0.180 |
11 |
1100 |
145 |
0.220 |
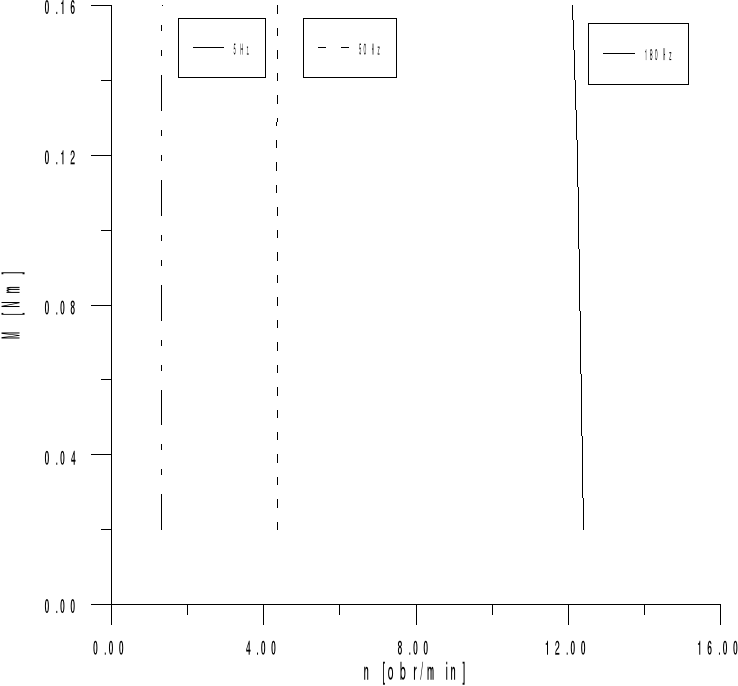
4. Charakterystyki mechaniczne
pomiary
UZ = 4 V
obciążenie |
moment obciążenia |
zasilanie 180 Hz |
zasilanie 50 Hz |
zasilanie 5 Hz |
g |
Nm |
okres obrotu w sek. |
okres obrotu w sek. |
okres obrotu w sek. |
100 |
0.020 |
4.84 |
13.75 |
45.61 |
600 |
0.120 |
4.90 |
13.82 |
45.87 |
800 |
0.160 |
4.95 |
13.73 |
45.16 |
średnia prędkość w obr/min |
|
12.253 |
4.358 |
1.314 |
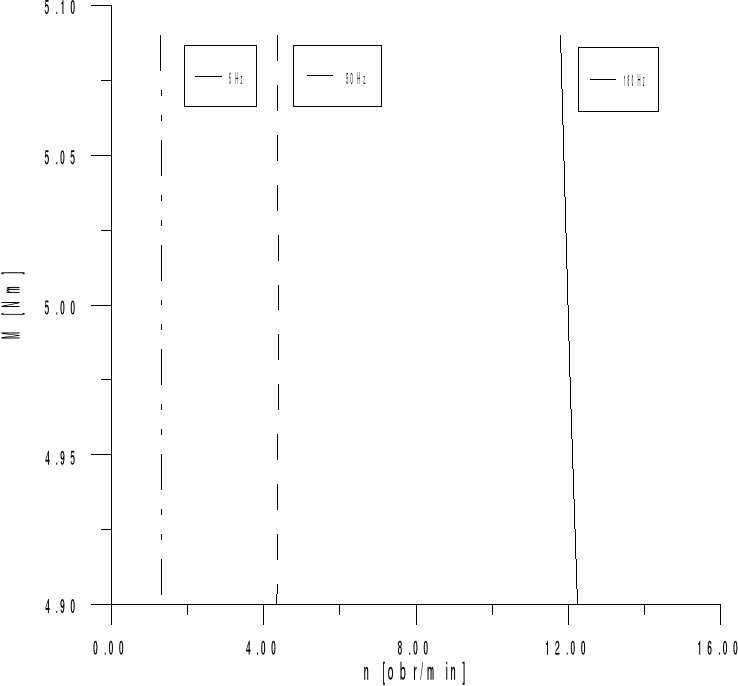
UZ = 6 V
obciążenie |
moment obciążenia |
zasilanie 180 Hz |
zasilanie 50 Hz |
zasilanie 5 Hz |
g |
Nm |
okres obrotu w sek. |
okres obrotu w sek. |
okres obrotu w sek. |
200 |
0.040 |
5.09 |
13.72 |
46.21 |
600 |
0.120 |
4.97 |
13.71 |
45.60 |
700 |
0.140 |
4.90 |
13.81 |
45.78 |
średnia prędkość w obr/min |
|
12.032 |
4.365 |
1.308 |
5. Obserwacje i wnioski
Dla pewnego przedziału częstotliwości, w którym powinien być zawarty zakres znamionowych częstotliwości pracy silnik krokowy przyjmuje prędkość niezależną od obciążenia Jednak przy dużych obciążeniach silnik `gubi' kroki a przy rosnącym obciążeniu utyka.
Prędkość obrotowa silnika krokowego nie zależy od wartości, ale od częstotliwości napięcia zasilającego.
Zjawisko nieproporcjonalnej zmiany prędkości obrotowej w funkcji częstotliwości napięcia zasilającego pozostaje zagadką.
Zgodnie z oczekiwaniami silnik krokowy traci sterowność ze wzrostem częstotliwości tym prędzej, im bardziej został obciążony (patrz charakterystyka graniczna).
5
Wyszukiwarka
Podobne podstrony:
silnik, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Silnik uniwesalny, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
silnik2faz, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Silnik wykonawczy dwufazowy, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Selsyn transformatorowy ściąga, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne
tarczowy, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
transformator polozenia katowego, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne
resolwer, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
TRANSF resorwer wydruk, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
selyny2, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
pr$dni~4, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
tachospr, Elektrotechnika, Rok 3, Maszyny elektryczne specjalne, specjalne
Badanie silnika szeregowo-bocznikowego prądu stałego, Elektrotechnika, Rok 3, Maszyny elektryczne
Badanie silnika synchronicznego (2), Elektrotechnika, Rok 3, Maszyny elektryczne
Badanie silnika skokowego, Elektrotechnika, Rok 3, Maszyny elektryczne
Badanie silnika synchronicznego (3), Elektrotechnika, Rok 3, Maszyny elektryczne
Silnik elektryczny jest to maszyna która zamienia energię elektryczną w energię mechaniczną
Silnik elektryczny - zasada dziaAania, Maszyny elektryczne
Praca równoległa transformatorów trójfazowych (2) (1), Elektrotechnika, Rok 2, Maszyny Elektryczne
więcej podobnych podstron