AKADEMIA GÓRNICZO - HUTNICZA im. Stanisława Staszica w Krakowie |
|
||
Wydział: Inżynierii Mechanicznej i Robotyki |
|
||
TEORIA STEROWANIA |
|||
Prowadzący: dr inż. Dariusz Grzybek |
|||
Student: Łukasz Kafel |
Kierunek: Mechatronika |
Ocena: |
|
|
Grupa: 25 |
|
|
|
Numer indeksu: 215426 |
|
|
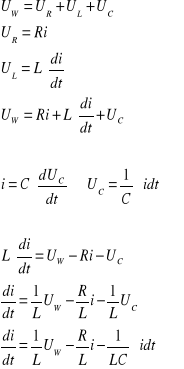
TEMAT ĆWICZENIA:
Badanie sterowalności i obserwowalności układów Nasze zadanie polegało na zbadaniu poniższego układu:
gdzie: Uw - napięcie wejściowe, Ul - napięcie wyjściowe
1. Modelowanie powyższego układu w środowisku MATLAB - SIMULINK
Poniżej przedstawiono układ zamodelowany w MATLAB - SIMULINKu
Wynik działania przy wymuszeniu skokiem jednostkowym
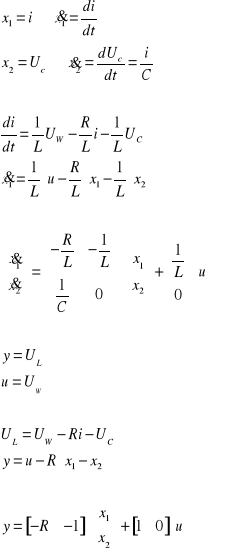
2. Modelowanie w przestrzeni stanów
Po zbudowaniu następującego M-pliku:
A=[-10 -1;1 0]
B=[1;0]
C=[-10 -1]
D=[1]
Qs=ctrb(A,B)
rank(A)
rank(Qs)
Otrzymaliśmy następujący wynik:
Qs =
1 -10
0 1
ans =
2
ans =
2
Ponieważ rząd macierzy sterowania i macierzy sterowalności są sobie równe obiekt jest sterowalny
3. Badanie obiektu za pomocą STATE - SPACE
Otrzymaliśmy następujący wynik:
Wynik jest identyczny, model w przestrzeni stanów jest więc prawidłowy
4. Badanie obserwowalności układu
Stworzyliśmy następujący M-plik
A=[-10 -1;1 0]
B=[1;0]
C=[-10 -1]
D=[1]
Qo=obsv(A,C)
rank(A)
rank(Qo)
Wynikiem jest następujący:
A =
-10 -1
1 0
B =
1
0
C =
-10 -1
D =
1
Qo =
-10 -1
99 10
ans =
2
ans =
2
Ponieważ rząd macierzy sterowalności i obserwowalności są sobie równe układ jest obserwowalny
W drugim przypadku mamy co następuje:
A=[-10 -1;1 0]
B=[1;0]
C=[0 1]
D=[1]
Qo=obsv(A,C)
rank(A)
rank(Qo)
Wynikiem jest następujący:
Qo =
0 1
1 0
ans =
2
ans =
2
Podobnie rząd macierzy sterowalności i obserwowalności są sobie równe układ jest obserwowalny.
7
Wyszukiwarka
Podobne podstrony:
Państwowa Wyższa Szkoła Zawodowa
lab4, PANSTWOWA WYŻSZA SZKOŁA ZAWODOWA
wytrzymka laborki, spręzyny, Państwowa Wyższa Szkoła Zawodowa w Chełmie
1.18finanse 2, Państwowa Wyższa Szkoła Zawodowa w Płocku
14.Oznaczanie utlenialności wody., Państwowa Wyższa Szkoła Zawodowa
10.2.Reakcje soli żelazowych (II) w stanie stałym., Państwowa Wyższa Szkoła Zawodowa
Sprawozdanie10, PANSTWOWA WYŻSZA SZKOŁA ZAWODOWA W ELBLAGU
1.20finanse 4, Państwowa Wyższa Szkoła Zawodowa w Płocku
muzeum, Państwowa Wyższa Szkoła Zawodowa
pmiar wymiarów zewnętrznych, PAŃSTWOWA WYŻSZA SZKOŁA ZAWODOWA
4.Analiza jakościowa kationów. Reakcja kationu manganu (Mn2+). NaOH, NH4OH, MnSO4., Państwowa Wyższa
karta 06, Państwowa Wyższa Szkoła Zawodowa w Nysie Instrukcja obróbki cieplnej Zarządzanie Produkcją
j.szyłak 04, Państwowa Wyższa Szkoła Zawodowa
wytrzymka laborki, tarcie ciegien, PAŃSTWOWA WYŻSZA SZKOŁA ZAWODOWA
Sprawozdanie09, PANSTWOWA WYŻSZA SZKOŁA ZAWODOWA W ELBLAGU
TiSP - dok, Lab TiSP - Sprawozdanie, PAŃSTWOWA WYŻSZA SZKOŁA ZAWODOWA
Sprawozdanie08, PANSTWOWA WYŻSZA SZKOŁA ZAWODOWA W ELBLAGU
więcej podobnych podstron