9. SIŁY PRZEKROJOWE W UKŁADACH PRZESTRZENNYCH
1
9. SIŁY PRZEKROJOWE W UKŁADACH PRZESTRZENNYCH
9.1 Wiadomości podstawowe
W rozdziałach 1 i 8 zajmowaliśmy się płaskimi układami prętowymi. Są to układy, w których osie
wszystkich prętów oraz wszystkie siły czynne i bierne działające na układ znajdowały się na tej samej
płaszczyźnie. W niniejszym rozdziale będziemy się zajmować układami, których osie nie znajdują na jednej
płaszczyźnie. Układy takie nazywamy przestrzennymi układami prętowymi. Będziemy się zajmować także
układami, których osie znajdują się na jednej płaszczyźnie lecz obciążenie działające na takie układy nie
znajduje się na tej płaszczyźnie. Układy taki będziemy nazywali płaskimi układami prętowymi obciążonymi
przestrzennie.
X
Y
Z
A
B
L
y
A
z
A
x
A
Rys. 9.1. Pręt w przestrzeni.
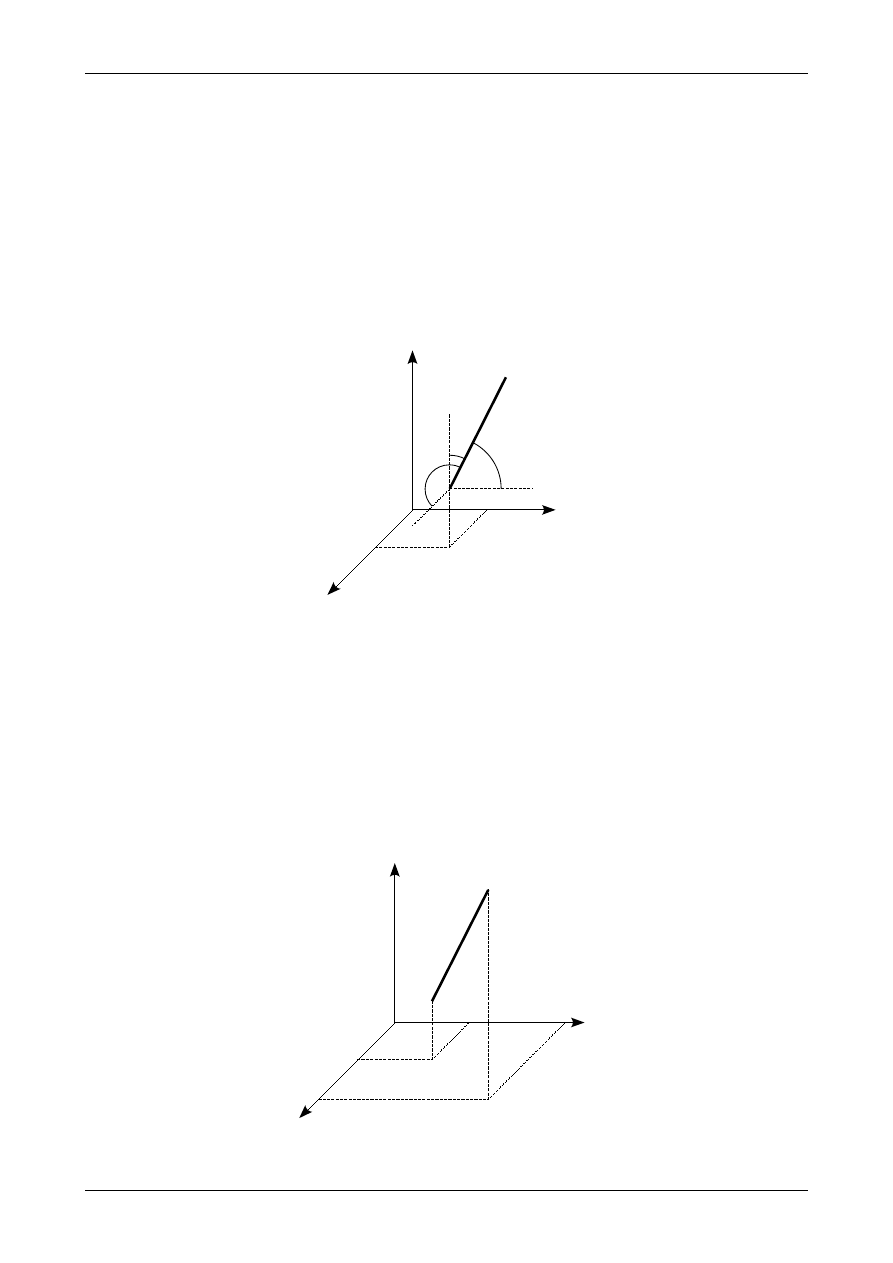
Jak wiadomo pręt na płaszczyźnie posiada trzy stopnie swobody. W przypadku pręta znajdującego się w
przestrzeni trójwymiarowej posiada on sześć stopni swobody. Rysunek 9.1 przedstawia przykładowy pręt
znajdujący się w układzie współrzędnych XYZ. Aby jednoznacznie opisać położenie pręta AB w układzie
XYZ należy zastosować sześć niezależnych współrzędnych czyli na przykład współrzędne punktu A x
A
, y
A
i z
A
oraz trzy kąty pomiędzy osią pręta a osiami układu współrzędnych
α
,
β
i
γ
. Sześcioma niezależnymi
współrzędnymi mogą być także obok współrzędnych punktu A współrzędne punktu B x
B
, y
B
i z
B
przedstawione
na rysunku 9.2.
X
Y
Z
A
B
L
y
A
z
A
x
A
x
B
y
B
z
B
Rys. 9.2. Pręt w przestrzeni.
Dr inż. Janusz Dębiński
BDM
9. SIŁY PRZEKROJOWE W UKŁADACH PRZESTRZENNYCH
2
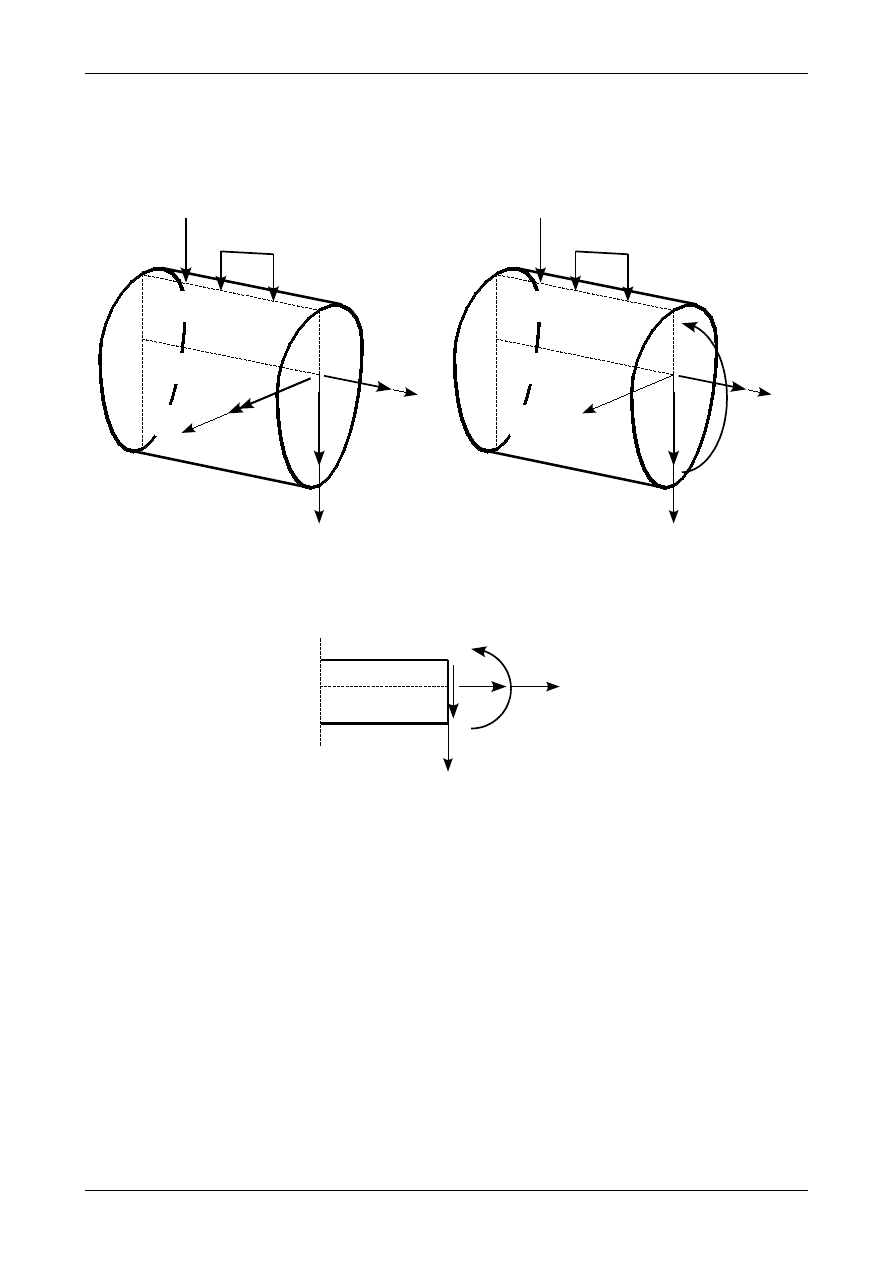
W płaskich układach prętowych mieliśmy tylko trzy siły wewnętrzne związane z przekrojem pręta: siłę
normalną N, siłę poprzeczną T
Z
oraz moment zginający M
Y
. Siły te przedstawia rysunek 9.3. Siły przekrojowe
na rysunku 9.3 są przedstawione w lokalnym układzie głównych osi bezwładności związanym z
przekrojem pręta. Rysunek 9.4 przedstawia siły przekrojowe w widoku z boku pręta.
Y=Y
0
=Y
gl
Z=Z
0
=Z
gl
X
P
q(x)
N
Y=Y
0
=Y
gl
Z=Z
0
=Z
gl
X
P
q(x)
N
M=M
Y
T=T
Z
M
=M
Y
T=T
Z
Rys. 9.3. Siły przekrojowe w przekroju pręta w płaskim układzie prętowym.
X
N
T
=
T
Z
M=M
Y
Z=Z
0
=Z
gl
Rys. 9.4. Siły przekrojowe w przekroju pręta w płaskim układzie prętowym.
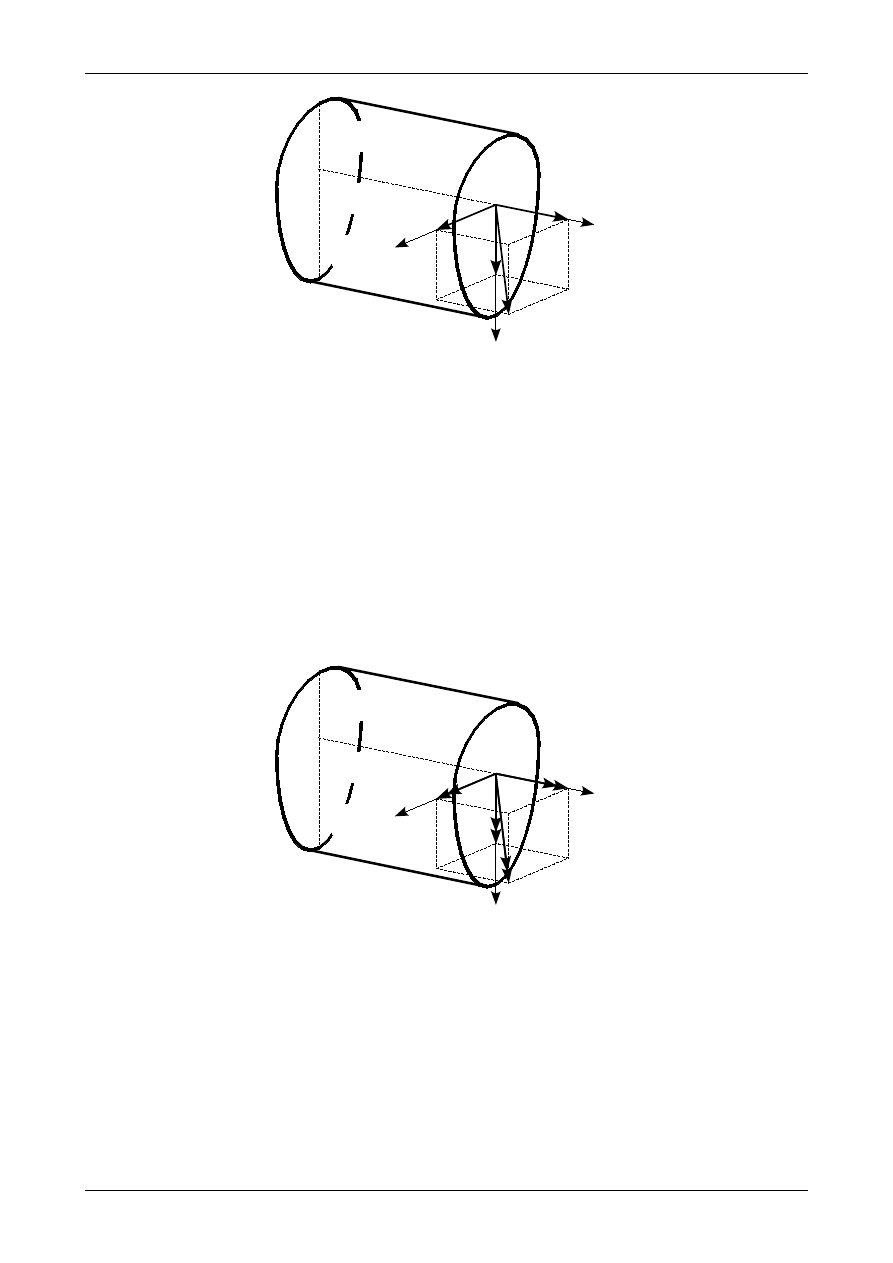
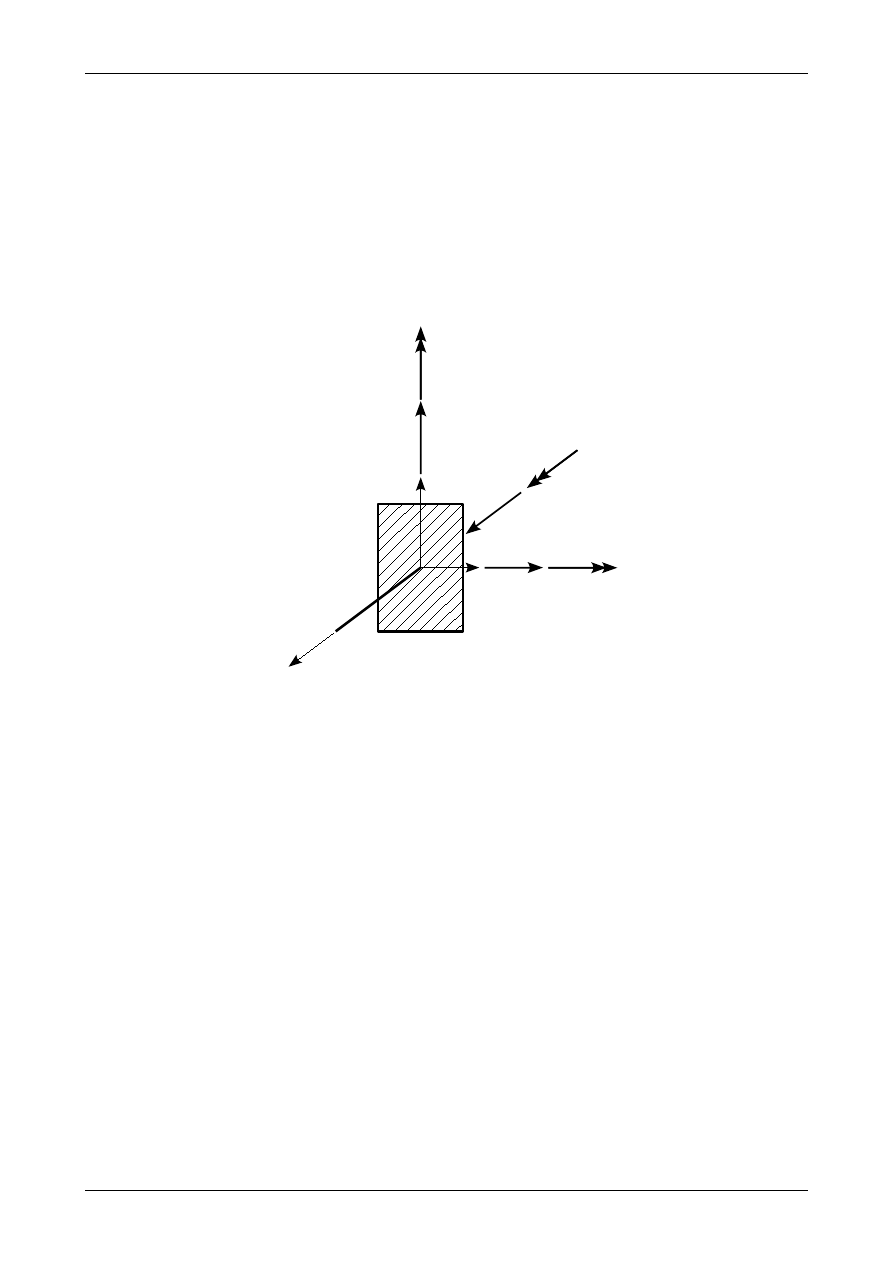
W przekroju pręta w przestrzennym układzie prętowym wypadkowa siła S będzie miała trzy składowe: siłę
normalną N, siłę poprzeczną po kierunku głównej osi bezwładności Y T
Y
. siłę poprzeczną po kierunku głównej
osi bezwładności Z T
Z
. Siłę S możemy zapisać jako
S=N⋅iT
Y
⋅jT
Z
⋅k
,
(9.1)
w którym
i
,
j
,
k
oznaczają wersory na osiach X, Y, Z. Rysunek 9.5 przedstawia wszystkie składowe
siły S w przekroju pręta przestrzennego. Składowe siły S będą dodatnie, jeżeli będą miały zwroty osi
lokalnego układu współrzędnych XYZ. Dodatnia siła normalna N będzie więc powodować rozciąganie pręta.
W przekroju pręta w przestrzennym układzie prętowym wypadkowy moment M będzie miał trzy składowe:
moment skręcający
M, moment zginający względem głównej osi bezwładności Y M
Y
. moment zginający
względem głównej osi bezwładności Z M
Z
. Moment M możemy zapisać jako
Dr inż. Janusz Dębiński
BDM
9. SIŁY PRZEKROJOWE W UKŁADACH PRZESTRZENNYCH
3
Y=Y
0
=Y
gl
Z=Z
0
=Z
gl
N
T
Z
T
Y
X
S
Rys. 9.5. Składowe siły S w przekroju pręta przestrzennego.
M
= N⋅iM
Y
⋅jM
Z
⋅k
M
,
(9.2)
Rysunek 9.6 przedstawia wszystkie składowe momentu M w przekroju pręta przestrzennego. Składowe
momentu M będą dodatnie, jeżeli będą miały zwroty osi lokalnego układu współrzędnych XYZ. Wynika z
tego, że moment skręcający
M będzie dodatni, jeżeli będzie powodował wykręcanie się śruby prawoskrętnej z
pręta. Moment zginający M
Y
będzie dodatni, jeżeli będzie powodował rozciąganie dolnej części przekroju
pręta przestrzennego. Moment zginający M
Z
będzie dodatni, jeżeli będzie powodował rozciąganie prawej
części przekroju pręta przestrzennego.
Y=Y
0
=Y
gl
Z=Z
0
=Z
gl
M
M
Z
M
Y
X
M
Rys. 9.6. Składowe momentu M w przekroju pręta przestrzennego.
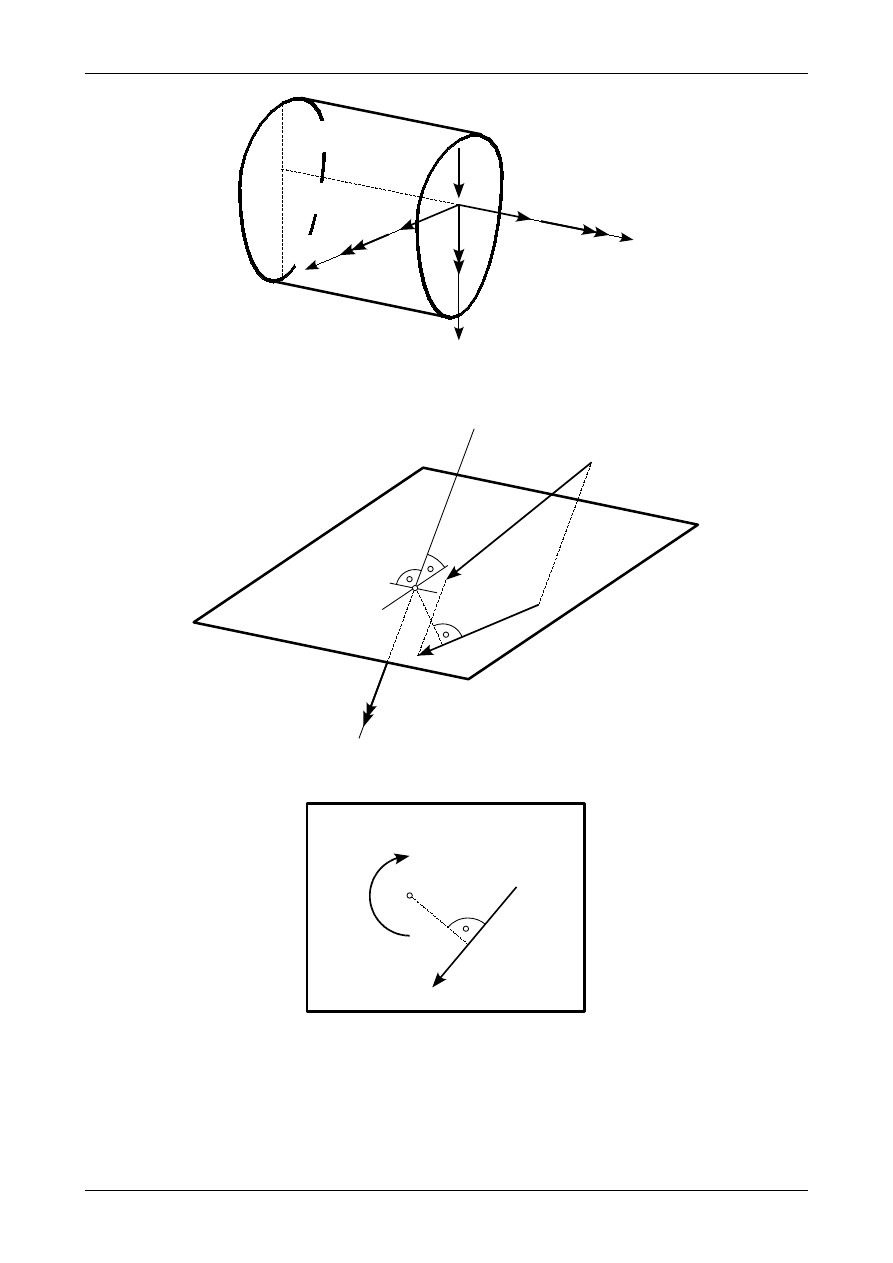
Rysunek 9.7 przedstawia wszystkie dodatnie siły przekrojowe w przekroju pręta przestrzennego.
9.2 Wyznaczenie reakcji w więzach
Pręt w przestrzeni posiada sześć stopni swobody więc możemy dla niego napisać sześć równań
równowagi. Będą to trzy równania sum rzutów wszystkich sił na trzy dowolne osie oraz trzy sumy momentów
względem trzech dowolnych nierównoległych do siebie osi. Obciążenie prętów przestrzennych ograniczymy do
przypadku sił skupionych i obciążenia ciągłego równomiernie rozłożonego prostopadłego do osi pręta.
Dr inż. Janusz Dębiński
BDM
9. SIŁY PRZEKROJOWE W UKŁADACH PRZESTRZENNYCH
4
Y=Y
0
=Y
gl
Z=Z
0
=Z
gl
N
T
Z
T
Y
X
M
M
Z
M
Y
Rys. 9.7. Dodatnie siły przekrojowe w przekroju pręta przestrzennego.
P
P'
O
a
M
O
Π
A
Rys. 9.8. Moment siły względem osi.
Π
P'
A
a
M
O
Rys. 9.9. Moment siły względem osi.
Rysunek 9.8 przedstawia dowolną siłę P oraz dowolną oś O. Chcąc wyznaczyć moment siły P względem osi O
należy najpierw wyznaczyć płaszczyznę
Π
prostopadłą do osi O. Następnie należy zrzutować siłę P na
płaszczyznę
Π
. W wyniku tego otrzymamy siłę P'. Na koniec należy wyznaczyć odległość siły P' od punktu, w
którym oś O przecina płaszczyznę
Π
czyli punktu A. Moment siły P względem osi O wynosi
Dr inż. Janusz Dębiński
BDM
9. SIŁY PRZEKROJOWE W UKŁADACH PRZESTRZENNYCH
5
M
O
=P'⋅a
.
(9.3)
Zwrot momentu określa nam kierunek wkręcania się śruby prawoskrętnej, której obrót spowodowany jest siłą
P'. Rysunek 9.9 przedstawia wektor momentu siły P względem osi O na płaszczyźnie
Π
widzianej z góry.
Moment siły względem osi będzie równy zero wtedy, gdy:
1. siła jest równoległa do osi,
2. kierunek działa siły przecina oś.
R
X
X
Y
Z
M
X
R
Y
M
Y
R
Z
M
Z
Rys. 9.10. Założone dodatnie reakcje w utwierdzeniu pręta przestrzennego.
W niniejszym rozdziale ograniczymy się tylko do prętów, które są do siebie prostopadłe. jedynym więzem jaki
będziemy rozpatrywali będzie utwierdzenie. Utwierdzenie odbiera wszystkie sześć stopni swobody więc
wystąpi w nim sześć reakcji przedstawionych na rysunku 9.10. Dla lepszej orientacji w utwierdzeniu
zakładamy globalny układ współrzędnych XYZ. Pierwotnie będziemy zakładać, że dodatnia reakcja ma
zwrot zgodny ze zwrotem odpowiedniej osi globalnego układu współrzędnych. Jeżeli z warunku równowagi
otrzymamy reakcję ujemną to będzie miała ona w rzeczywistości zwrot przeciwny do zwrotu osi globalnego
układu współrzędnych.
9.3 Wykresy sił przekrojowych
Chcąc narysować wykresy sił przekrojowych w układach przestrzennych należy przyjąć jakąś zasadę
znakowania tych sił.
Dodatnia siła normalna N będzie rozciągać pręt czyli będzie mieć ten sam zwrot co siła przedstawiona na
rysunkach 9.5 i 9.7.
Moment skręcający
M będzie dodatni, jeżeli będzie wykręcał śrubę prawoskrętną z pręta czyli będzie mieć ten
sam zwrot co moment przedstawiony na rysunkach 9.6 i 9.7.
Wykresy momentów zginających będziemy rysować po stronie rozciąganej pręta. Na wykresie momentów
zginających nie będziemy pisali znaków.
Dr inż. Janusz Dębiński
BDM
9. SIŁY PRZEKROJOWE W UKŁADACH PRZESTRZENNYCH
6
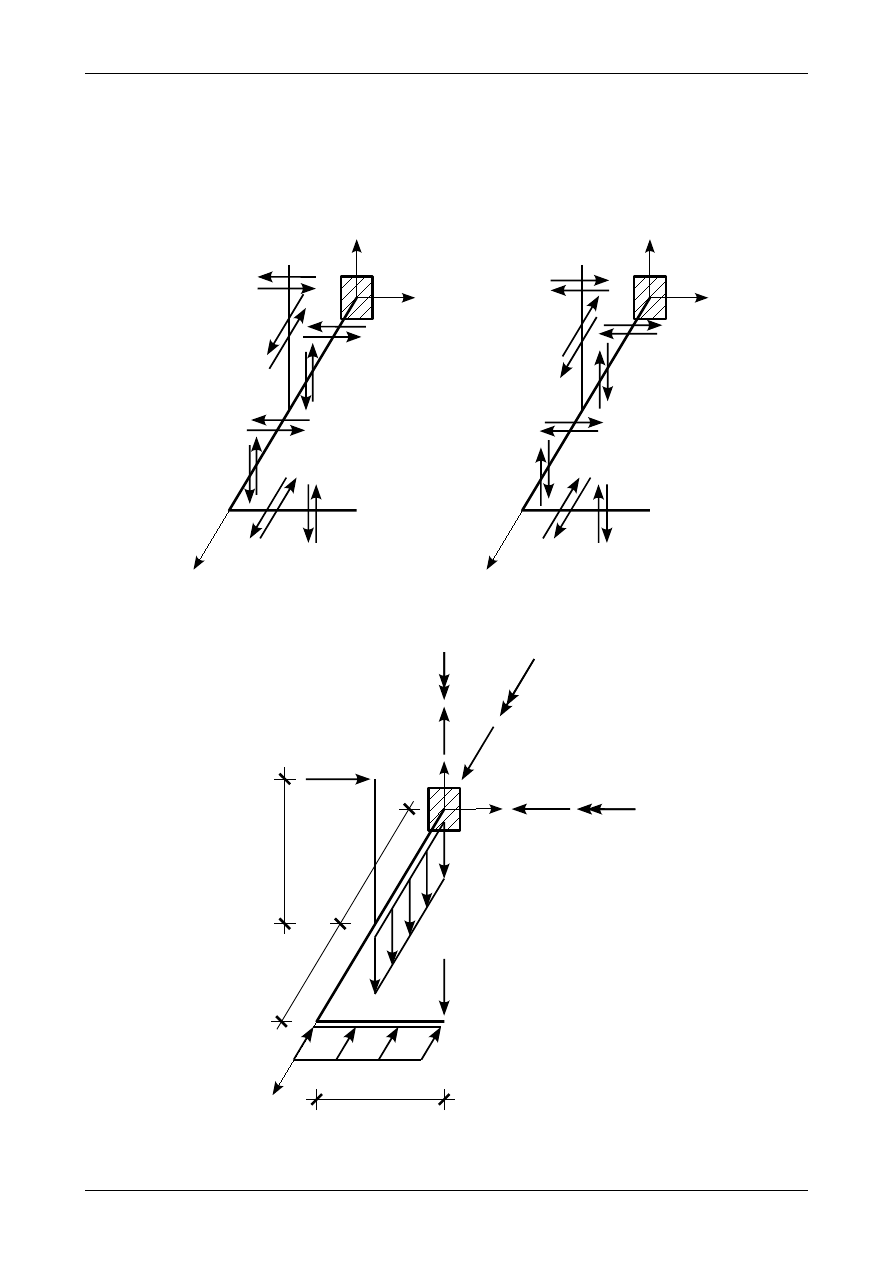
Chcąc ustalić znak siły poprzecznej należy spojrzeć na dany układ przestrzenny wzdłuż osi globalnego układu
współrzędnych XYZ w stronę przeciwną do dodatnich zwrotów osi układu globalnego. Dodatnia siła
poprzeczna będzie kręciła widzianą odciętą częścią ramy zgodnie z ruchem wskazówek zegara. Rysunek 9.11
przedstawia dodatnie i ujemne siły poprzeczne w przykładowej ramie przestrzennej. Początek globalnego
układu współrzędnych znajduje się w miejscy utwierdzenia.
Y
Z
X
a)
Y
Z
X
b)
Rys. 9.11. Siły poprzeczne w ramie przestrzennej: a) dodatnie, b) ujemne.
Y
Z
X
q
1
q
2
P
2
P
1
A
B
C
D
E
a
b
d
c
R
X
M
X
R
Y
M
Y
R
Z
M
Z
Rys. 9.12. Przykładowa rama przestrzenna.
Dr inż. Janusz Dębiński
BDM
9. SIŁY PRZEKROJOWE W UKŁADACH PRZESTRZENNYCH
7
Rysunek 9.12 przedstawia przykładową przestrzenną ramę wspornikową. Jak już wcześniej założyliśmy
obciążeniem pręta są tylko siły skupione i obciążenie ciągłe równomiernie rozłożone. Na rysunku tym
zaznaczone są także prawidłowe zwroty reakcji podporowych.
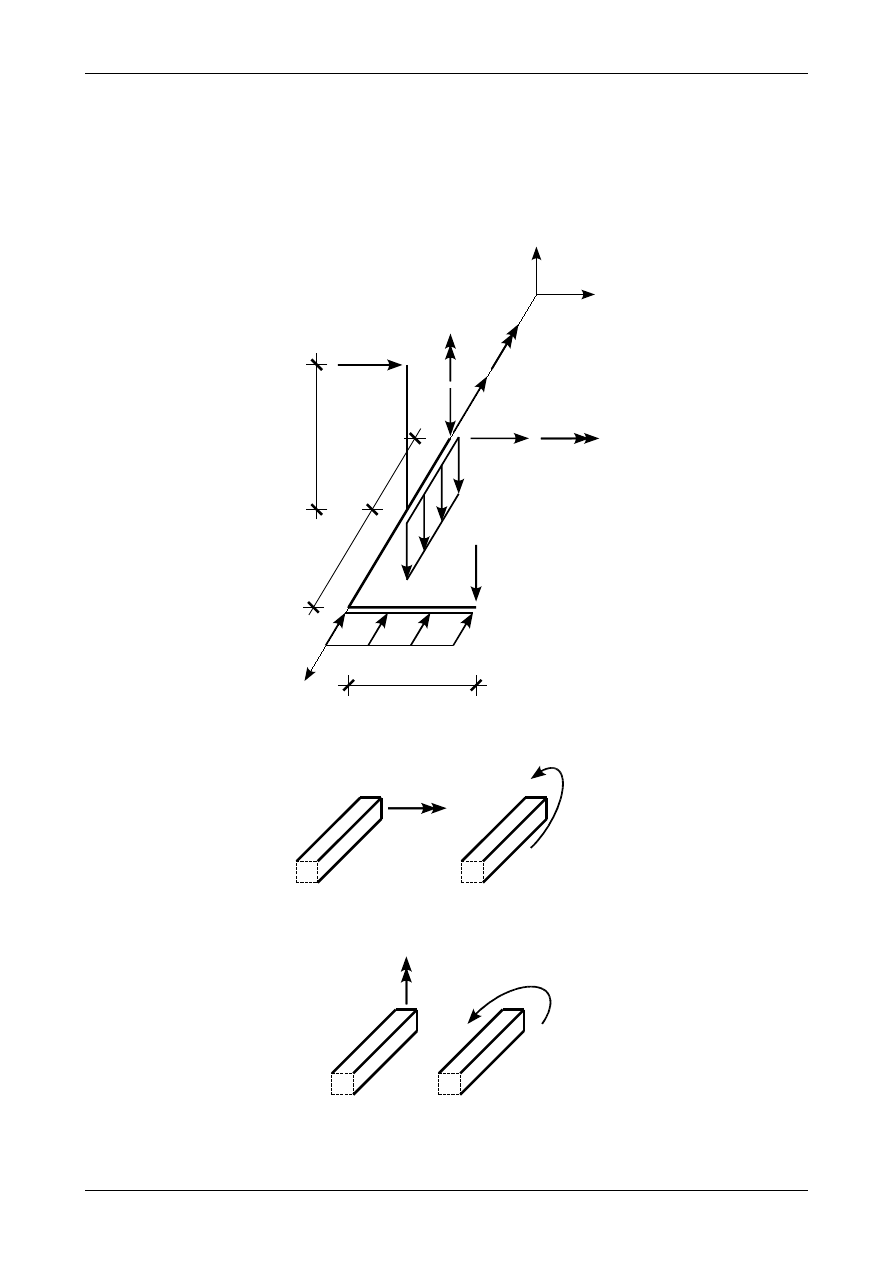
Chcąc wyznaczyć siły przekrojowe w przedziale CE należy przeciąć pręt w dowolnym miejscu tego przedziału
i rozpatrzyć równowagę odciętej części ramy wspornikowej. Odciętą część ramy przedstawia rysunek 9.13.
X
q
1
q
2
P
2
P
1
A
B
C
D
a
b
x
c
N
M
T
Y
M
Y
T
Z
M
Z
Y
Z
Rys. 9.13. Odcięta część ramy wspornikowej.
M
Y
M
Y
Rys. 9.14. Moment zginający M
Y
.
M
Z
M
Z
Rys. 9.15. Moment zginający M
Z
.
Dr inż. Janusz Dębiński
BDM

9. SIŁY PRZEKROJOWE W UKŁADACH PRZESTRZENNYCH
8
W przekroju pręta zakładamy dodatnią siłę normalną N rozciągającą ten pręt, dodatni moment skręcający
M
wykręcający śrubę prawoskrętną z pręta. Dodatnia siła poprzeczna T
Y
kręci zgodnie z ruchem wskazówek
zegara odciętą częścią ramy wspornikowej patrząc na nią od góry. Dodatnia siła poprzeczna T
Z
kręci zgodnie
z ruchem wskazówek zegara odciętą częścią ramy wspornikowej patrząc na nią od prawej strony (przeciwnie
do dodatniego zwrotu osi Y). Wektory dodatnich momentów zginających M
Y
oraz M
Z
zakładamy zgodnie ze
zwrotami osi Y i Z. Rysunek 9.14 przedstawia moment zginający M
Y
, który rozciąga dolną część przekroju
pręta. Rysunek 9.15 przedstawia moment zginający M
Z
, który rozciąga prawą część pręta. Jak wiadomo
wektor momentu zginającego jest zawsze prostopadły do płaszczyzny, na której działa. Czyli moment
zginający M
Y
będziemy rysowali na płaszczyźnie ZX natomiast moment zginający M
Z
na płaszczyźnie XY.
Funkcję siły normalnej N wyznaczymy z warunku sumy rzutów wszystkich sił działających na odciętą część
ramy wspornikowej na kierunek siły normalnej.
Funkcję siły poprzecznej T
Y
wyznaczymy z warunku sumy rzutów wszystkich sił działających na odciętą
część wspornikowej ramy na kierunek tej siły poprzecznej.
Funkcję siły poprzecznej T
Z
wyznaczymy z warunku sumy rzutów wszystkich sił działających na odciętą część
ramy wspornikowej na kierunek tej siły poprzecznej.
Funkcję momentu skręcającego
M wyznaczymy z warunku sumy momentów wszystkich sił działających na
odciętą część ramy wspornikowej względem osi, która pokrywa się kierunkiem wektora momentu
skręcającego.
Funkcję momentu zginającego M
Y
wyznaczymy z warunku sumy momentów wszystkich sił działających na
odciętą część ramy wspornikowej względem osi, która pokrywa się kierunkiem wektora tego momentu
zginającego.
Funkcję momentu zginającego M
Z
wyznaczymy z warunku sumy momentów wszystkich sił działających na
odciętą część ramy wspornikowej względem osi, która pokrywa się kierunkiem wektora tego momentu
zginającego.
W niniejszym rozdziale zastosujemy jednak inną metodę wyznaczania wykresów sił przekrojowych w
układach przestrzennych. Opiera się ona na wykorzystaniu właściwości tych wykresów wynikających z
różniczkowych równań równowagi (1.53), (1.54) lub (1.55), (1.56).
Jak wiadomo obciążeniem pręta będą tylko siły skupione prostopadłe lub równoległe do osi pręta oraz
obciążenie ciągłe równomiernie rozłożone prostopadłe do osi pręta. Płaszczyzny, na których znajdować się
będzie obciążenie są do siebie prostopadłe i pokrywają się z osiami globalnego układu współrzędnych
przedstawionego na rysunku 9.12. Siły przekrojowe będą więc spełniały następujące warunki:
1. Siła normalna N będzie w całym przedziale zerowa lub stała.
2. Moment skręcający
M będzie w całym przedziale zerowy lub stały.
3. Siły poprzeczne T
Y
i T
Z
będą stałe w całym przedziale, jeżeli obciążenie ciągłe równomiernie
rozłożone będzie równe zero.
4. Siły poprzeczne T
Y
i T
Z
będą miały w danym przedziale wykres liniowy, jeżeli obciążenie ciągłe
równomiernie rozłożone będzie różne do zera.
5. Momenty zginające M
Y
i M
Z
będą miały w danym przedziale wykres liniowy, jeżeli obciążenie ciągłe
równomiernie rozłożone będzie równe zero.
6. Momenty zginające M
Y
i M
Z
będą miały w danym przedziale wykres paraboliczny, jeżeli obciążenie
ciągłe równomiernie rozłożone będzie różne od zera. Należy pamiętać, że parabola będzie miała
„brzuszek” w stronę obciążenia.
Wartości siły normalnej N i momentu skręcającego
M będziemy wyznaczać rozpatrując równowagę odciętych
części układu prętowego.
Dla wyznaczenia wykresów sił poprzecznych i momentów zginających będziemy rzutowali układ prętowy
wraz z obciążeniem na płaszczyzny XY, YZ i ZX. Jeżeli jakaś siłą skupiona lub wypadkowa z obciążenia
ciągłego równomiernie rozłożonego będzie dawała rzut w postaci punktu nie będziemy jej uwzględniali.
Dr inż. Janusz Dębiński
BDM
9. SIŁY PRZEKROJOWE W UKŁADACH PRZESTRZENNYCH
9
Rzutując układ prętowy na trzy płaszczyzny otrzymamy trzy płaskie ramy wspornikowe, dla których
wykonamy wykresy siły poprzecznej i momentu zginającego. Wykresy te przeniesiemy na układ przestrzenny
pamiętając o orientacji płaszczyzn. Suma wykresów sił poprzecznych i momentów zginających dla trzech
płaskich ram wspornikowych da nam ostateczne wykresy tych sił dla układu przestrzennego.
Y
Z
A
B
C=D
E
X
d
b
a
q
1
P
2
Rys. 9.16. Rzut układu przestrzennego na płaszczyznę XY.
P
2
P
1
a
c
Y
Z
A
B=C=E
X
D
q
2
⋅d
Rys. 9.17. Rzut układu przestrzennego na płaszczyznę YZ.
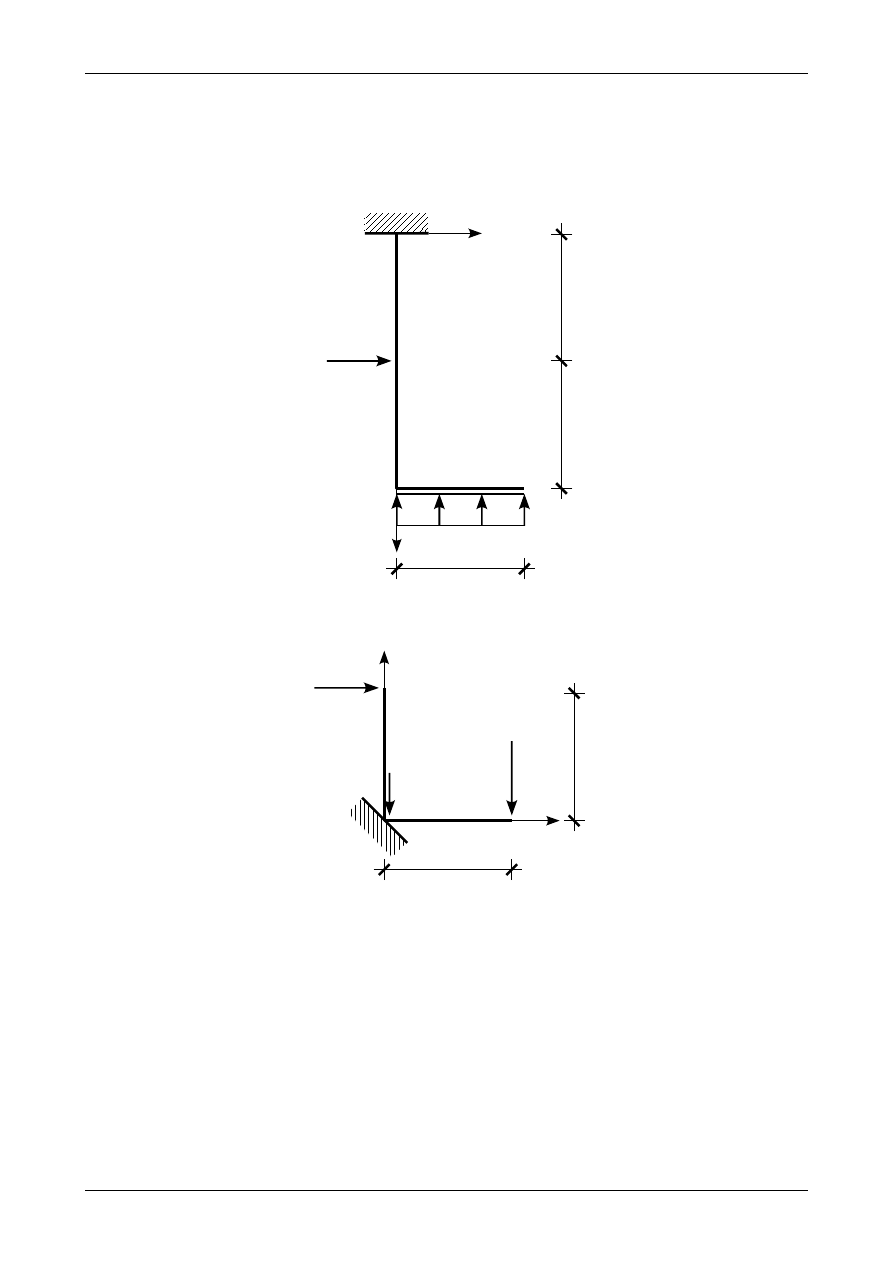
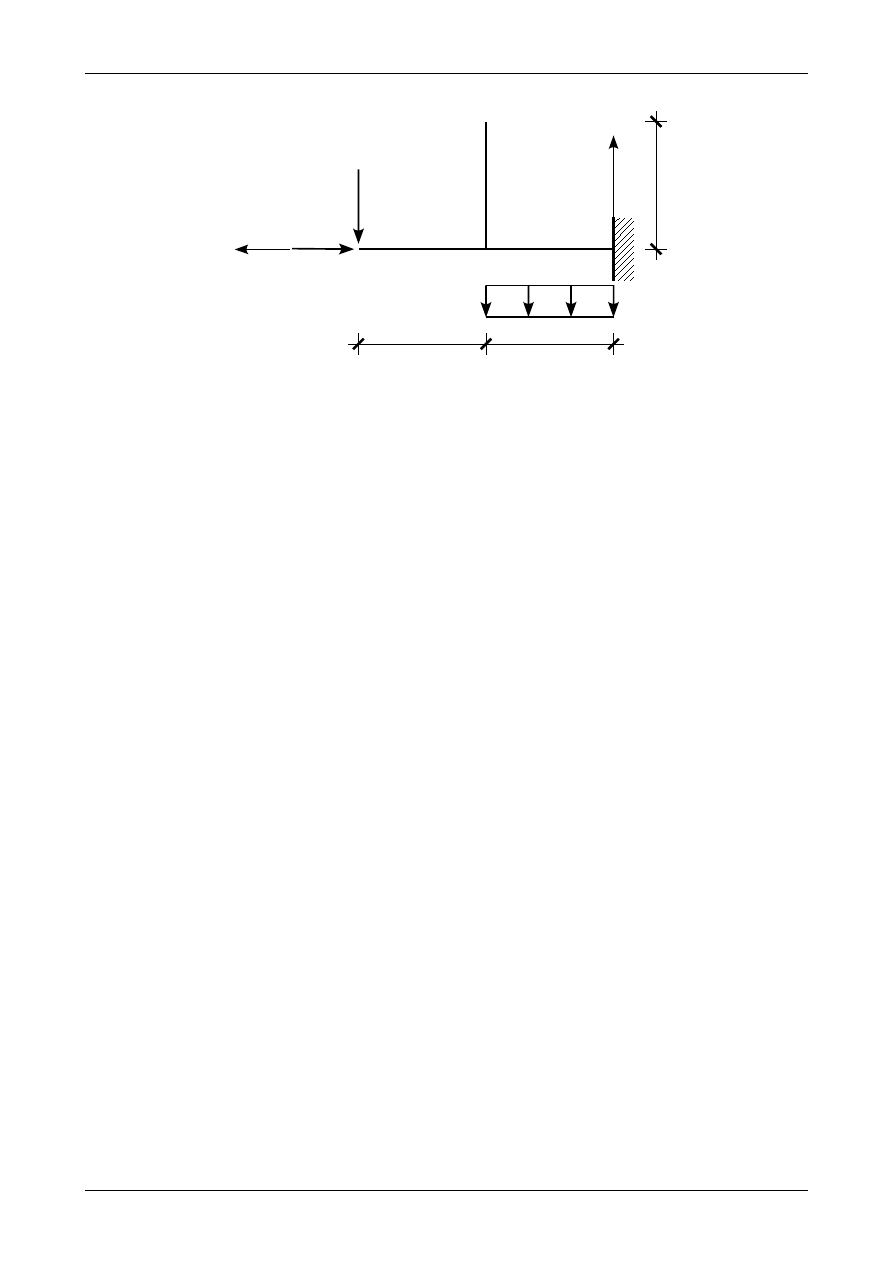
Rysunki 9.16, 9.17 i 9.18 przedstawiają rzuty ramy wspornikowej przedstawionej na rysunku 9.12. na
płaszczyzny XY, YZ i ZX. Wypadkowa z obciążenia q
2
przedstawiona na rysunku 9.17 nie będzie miała
wpływu na wykresy siły poprzecznej i momentu zginającego, ponieważ przekaże się ona bezpośrednio na
podporę. Wypadkowa z obciążenia q
1
przedstawiona na rysunku 9.18 nie będzie miała wpływu na wykresy
siły poprzecznej i momentu zginającego, ponieważ powoduje ona tylko ściskanie pręta BE. Chcąc wyznaczyć
wykresy sił przekrojowych zastosujemy metody opisane w zadaniach Z1/7 i Z1/8.
Mając już wykonane wykresy sił przekrojowych w układzie przestrzennym należy je sprawdzić. W tym celu
musimy rozpatrzeć równowagę siły normalnej i sił poprzecznych oraz momentu skręcającego i momentów
zginających w węzłach B, C. Na koniec sprawdzimy równowagę sił przekrojowych i reakcji podporowych w
utwierdzeniu. Równowaga węzłów oraz równowaga w utwierdzeniu zostanie dokładnie opisana w załączonych
przykładach.
Dr inż. Janusz Dębiński
BDM
9. SIŁY PRZEKROJOWE W UKŁADACH PRZESTRZENNYCH
10
B=A
C
D
E
X
Y
Z
b
d
c
q
2
P
1
q
1
⋅a
Rys. 9.18. Rzut układu przestrzennego na płaszczyznę ZX.
Dr inż. Janusz Dębiński
BDM
Document Outline
Wyszukiwarka
Podobne podstrony:
DREWNO, SIŁY PRZEKROJOWE, SIŁY PRZEKROJOWE - WARTOŚCI EKSTREMALNE: T
IV.1 Siły przekrojowe w prętowych ustrojach statycznie wyzna, IV
92 Siły przekrojowe (wewnętrzne) w zagiętym pręcie
1 Siły przekrojowe w ustrojach prętowych
03a sily przekrojowe suplement imim
rzeczywiste sily przekrojowe
01. Siły przekrojowe w ustrojach prętowych, EGZAMIN INZYNIERSKI
Siły przekrojowe, Materiały, Inżynieria Środowiska, Semestr 2, Mechanika techniczna, egzaminy
sily przekrojowe N Q M, Wytrzymałość
OBLICZONE SIŁY PRZEKROJOWE TABELE I WYKRESY SIŁ
DREWNO, SIŁY PRZEKROJOWE 2, SIŁY PRZEKROJOWE: T
2 9! zadania sily przekrojowe
OBLICZONE SIŁY PRZEKROJOWE TABELE I WYKRESY SIŁ
Rzeczywiste siły przekrojowe, 5
03 sily przekrojowe imimid 4476 Nieznany (2)
94 Siły przekrojowe w załamanym pręcie płaskim obciążonym siłami skupionymi dowolnie usytuowanymi
P 1 siły przekrojowe
~$eczywiste sily przekrojowe doc
więcej podobnych podstron