1
NAPĘD ELEKTRYCZNY
Napędem elektrycznym nazywamy zespół urządzeń i aparatów elektrycznych pracujących na
zasadzie wykorzystania energii elektrycznej i służących do nadawania ruchu maszynie roboczej .
W najprostszym układzie napędowym występuje jednokrotne przetwarzanie energii .
Natomiast w złożonych układach napędowych , zanim energia elektryczne zostanie przekazana
maszynie roboczej , może być kilkakrotnie przetwarzana lub mogą być zmienione jej parametry
elektryczne . Każde przekształcenie energii jest związane ze stratami . Elektryczne układy napędowe
odznaczają się jednak sprawnością energetyczną oraz prostotą budowy i łatwością obsługi .
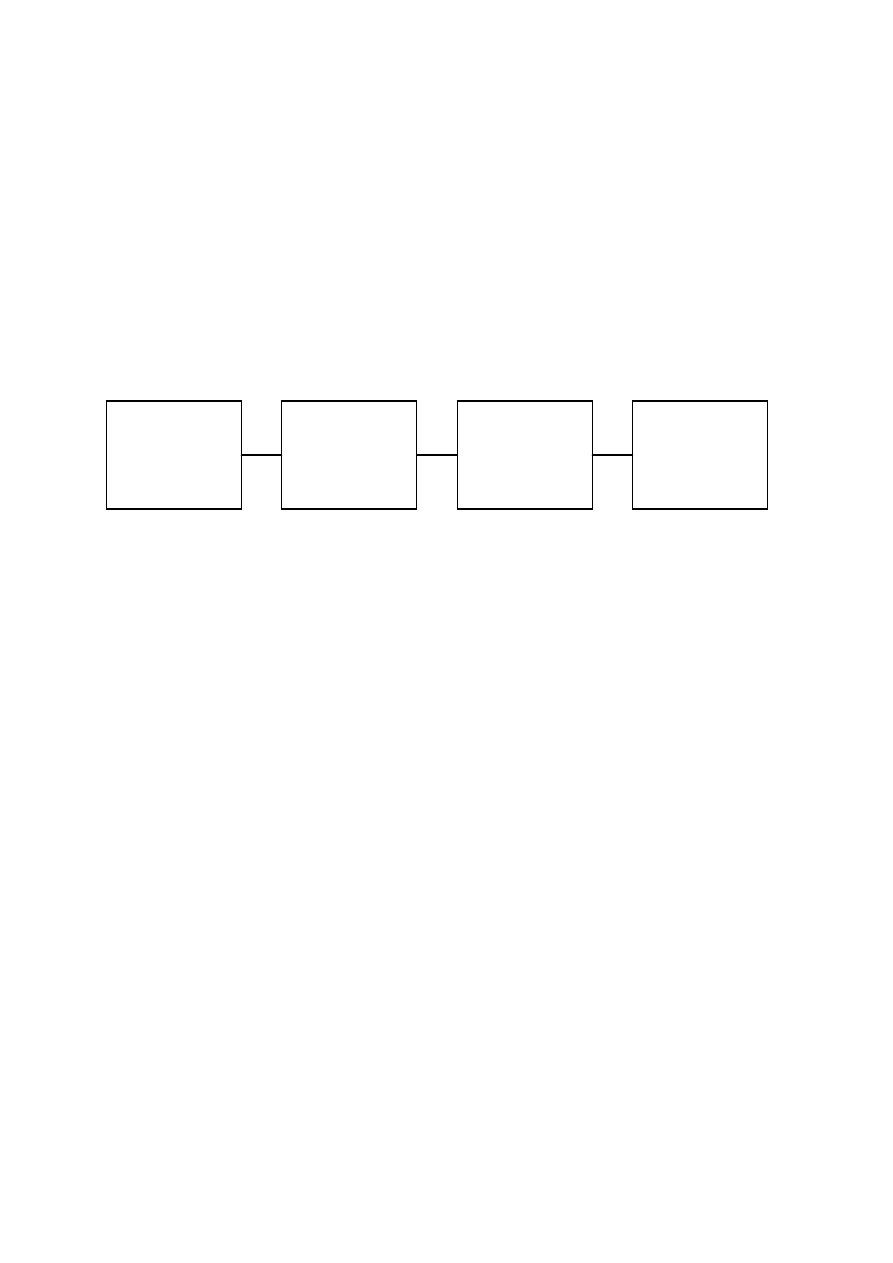
Elektryczny układ napędowy składa się z następujący części :
1.
ź
ródła napięcia (zasilacz)
2.
części łączącej silnik z maszyną roboczą , sprzęgła , przekładni pasowej lub przekładni zębatej
3.
silnika elektrycznego , w którym doprowadzana energia elektryczna przetwarzana jest na energię
elektryczną wirującego wału
4.
maszyny roboczej
Spośród napędowych silników elektrycznych można wyróżnić :
1.
silniki prądu stałego – obcowzbudne , bocznikowe , szeregowe , szeregowo – bocznikowe,
krokowe (skokowe)
2.
silniki prądu przemiennego – asynchroniczne klatkowe i pierścieniowe , synchroniczne
Układ napędowy jest zasilany ze źródła energii , które jest charakteryzowane :
1.
wartością mocy
2.
rodzajem napięcia : stałe lub przemienne
3.
wartością napięcia np. 440V , 380V , 220V , 110V , 24V
4.
liczbą faz
5.
wartością częstotliwości np. 50Hz , 400Hz , 6Hz
6.
wartością rezystancji lub impedancji wewnętrznej źródła
7.
kształtem napięcia : sinusoidalne , prostokątne , odkształcone
W skład wyposażenia układu napędowego wchodzą następujące aparaty elektryczne :
1.
łączniki
2.
rezystory regulacyjne i rozruchowe
3.
dławiki wygładzające
4.
układy regulacji napięcia
5.
urządzenia rozruchowe
6.
urządzenia zabezpieczające
7.
urządzenia kontrolujące pracę silnika
8.
urządzenia hamujące
9.
połączenia pędne
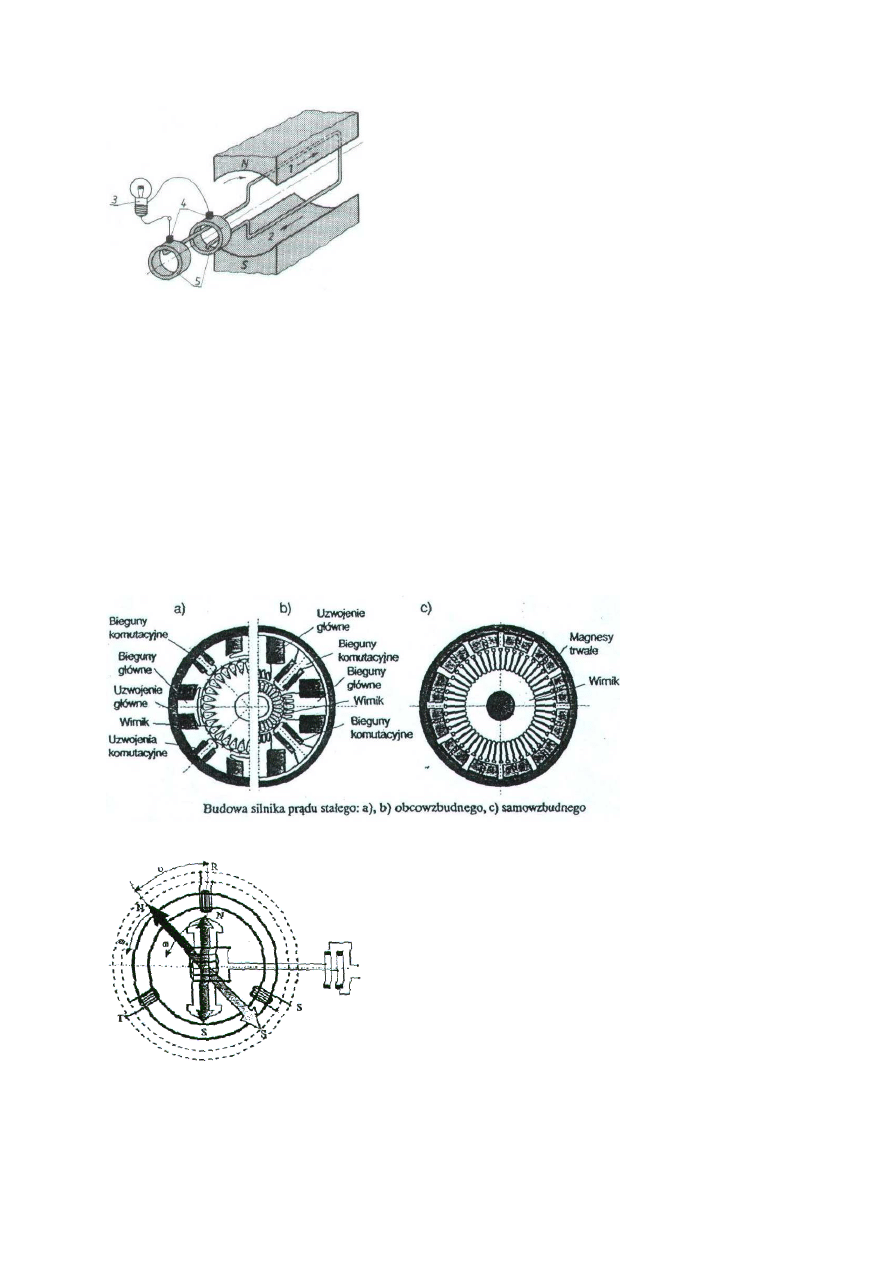
Silniki prądu stałego .
Zasada działania .
ZASILACZ
APARATURA
ŁĄCZENIOWA
SILNIK
MASZYNA
ROBOCZA
2
Rozpatrywać będziemy model elementarny składający się z jednego zwoju obracającego się między
dwoma biegunami marginesu . Początek i koniec zwoju są połączone z dwoma pierścieniami
ś
lizgowymi , po których ślizgają się szczotki odprowadzające prąd do zamkniętego obwodu
zewnętrznego . Jeżeli zwój znajdujący się w polu magnetycznym o indukcji B obraca się z prędkością
v , to w jego bokach o długości l indukuje się siła elektromotoryczna . Jeżeli obwód tego zwoju będzie
zamknięty (przez szczotki i pierścienie ślizgowe) , to popłynie w nim prąd o kierunku zgodnym ze
zwrotem indukowanej siły elektromotorycznej .
Budowa :
1.
nieruchomy stojan
2.
wirujący wirnik (twornik)
3.
bieguny główne
4.
bieguny pomocnicze
5.
komutator
Rozróżniamy silniki :
1.
samowzbudne – bocznikowe , szeregowe , szeregowo – bocznikowe
2.
obcowzbudne
Silniki prądu przemiennego .
Silniki synchroniczne.
Maszyną synchroniczną nazywa się maszynę prądu przemiennego , której wirnik w stanie ustalonym
obraca się z taką samą prędkością , z jaką wiruje pole magnetyczne .
Maszyny synchroniczne są budowane w dwóch odmianach :
1.
z biegunami utajonymi (z wirnikiem cylindrycznym)
1,2- boki zezwoju
3- odbiornik
4- szczotki
5- pierścienie ślizgowe
3
2.
z biegunami jawnymi (z wirnikiem jawnobiegunowym)
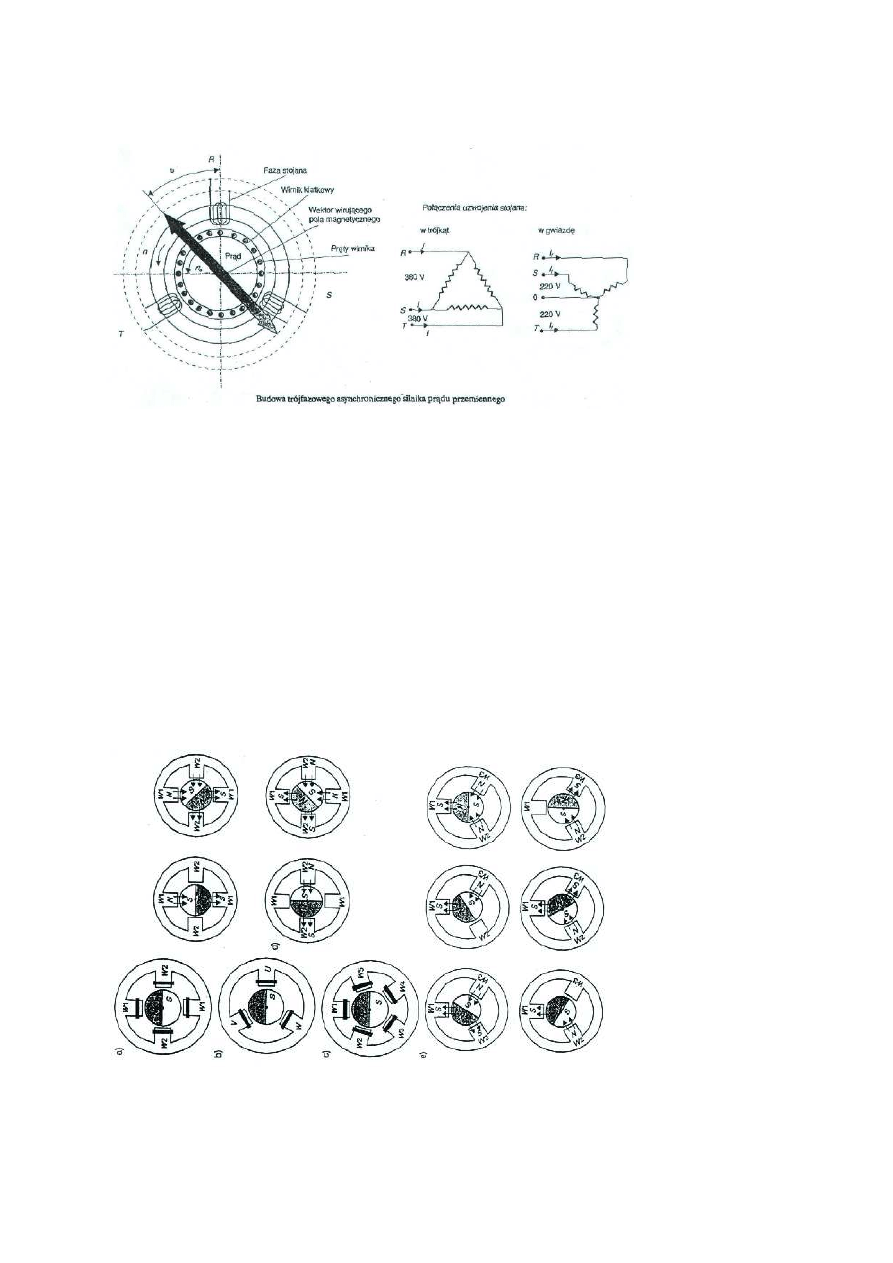
Silniki asynchroniczne.
Maszyna indukcyjne (asynchroniczna) to taka , w której napięcie do obwodu wirnika nie jest
doprowadzone z zewnątrz , lecz pojawia się w wyniku indukcji elektromagnetycznej .
Wyróżnia się silniki :
1.
o uzwojeniach klatkowych – uzwojenia wirników silników indukcyjnych mogą być wykonane
podobnie jak w stojanie , z drutu nawojowego , lub z nieizolowanych prętów o dużym przekroju
całkowicie wypełniający żłobek . Wystające poza rdzeń części poszczególnych prętów są ze sobą
połączone po obu stronach pierścieniami zwierającymi, tworząc wraz z prętami uzwojenia jakby
klatkę , dlatego silnik o takim uzwojeniu nazywamy klatkowym .
2.
o uzwojeniach pierścieniowych – jeżeli uzwojenie wirnika jest wykonane z drutu nawojowego , to
istnieje możliwość dołączenia do obwodu wirnika dodatkowych elementów zwiększających
rezystancję każdej fazy . Aby to było możliwe , uzwojenie wirnika jest połączone na stałe z
pierścieniami ślizgowymi . Silnik z takim uzwojeniem nazywamy silnikiem indukcyjnym
pierścieniowym .
Silniki krokowe.
Silniki krokowe są elementami wykonawczymi przetwarzającymi impulsy elektryczne na przesunięcia
kątowe lub liniowe , nazywane krokami lub skokami . W silnikach tych wykorzystuje się zjawisko
zmiany położenia rdzenia ferromagnetycznego (wirnika) w polu magnetycznym w celu osiągnięcia
optymalnej przewodności obwodu magnetycznego .
Do zalet napędów elektrycznych należy zaliczyć:
1.
zwarta konstrukcja napędu i przetworników sterująco – kontrolnych (czujników stanu)
Schemat budowy i działania
silnika wysokomomentowego
wielofazowego z wirnikiem
jednobiegunowym i stojanem :
a) dwubiegunowym – silnik
dwufazowy ; b)
trójbiegunowym – silnik
trójfazowy ; c)
pięciobiegunowym – silnik
pięciofazowy ; kolejność
zasilania faz w silniku
czterobiegunowym (d) i
trójbiegunowym (e)
4
2.
duża szybkość działania dzięki małej bezwładności elementów ruchomych silnika
3.
stałość prędkości obrotowej
4.
wysoka maksymalna prędkość obrotowa (do 15000 obr/min)
5.
szeroki zakres regulacji rozwijanych momentów
6.
małe bezwładności wirników , uzyskiwane dzięki specjalnym konstrukcjom
7.
duży moment obrotowy przy maksymalnej prędkości
8.
bezpieczeństwo pracy
9.
niski poziom szumu i wibracji oraz brak zanieczyszczenia otoczenia
10.
trwałość i stosunkowo duża pojemność cieplna ; umożliwia to eksploatację bez nadzoru i
ogranicza czynności obsługi , wymagają niewielkiej liczby zabiegów konserwatorskich
11.
łatwy demontaż silników w przypadku wystąpienia konieczności ich wymiany bądź remontu
12.
ogólnodostępność , taniość i łatwość doprowadzenia energii zasilania
W grupie wad należy wymienić :
1.
ograniczoną trwałość szczotek w komutatorach silników prądu stałego
2.
ograniczone wykorzystanie w środowisku zagrożonym wybuchem (możliwość wystąpienia
przebić , zwarć)
3.
zależność prędkości od obciążenia , co wymaga rozbudowy układów regulacji napędu
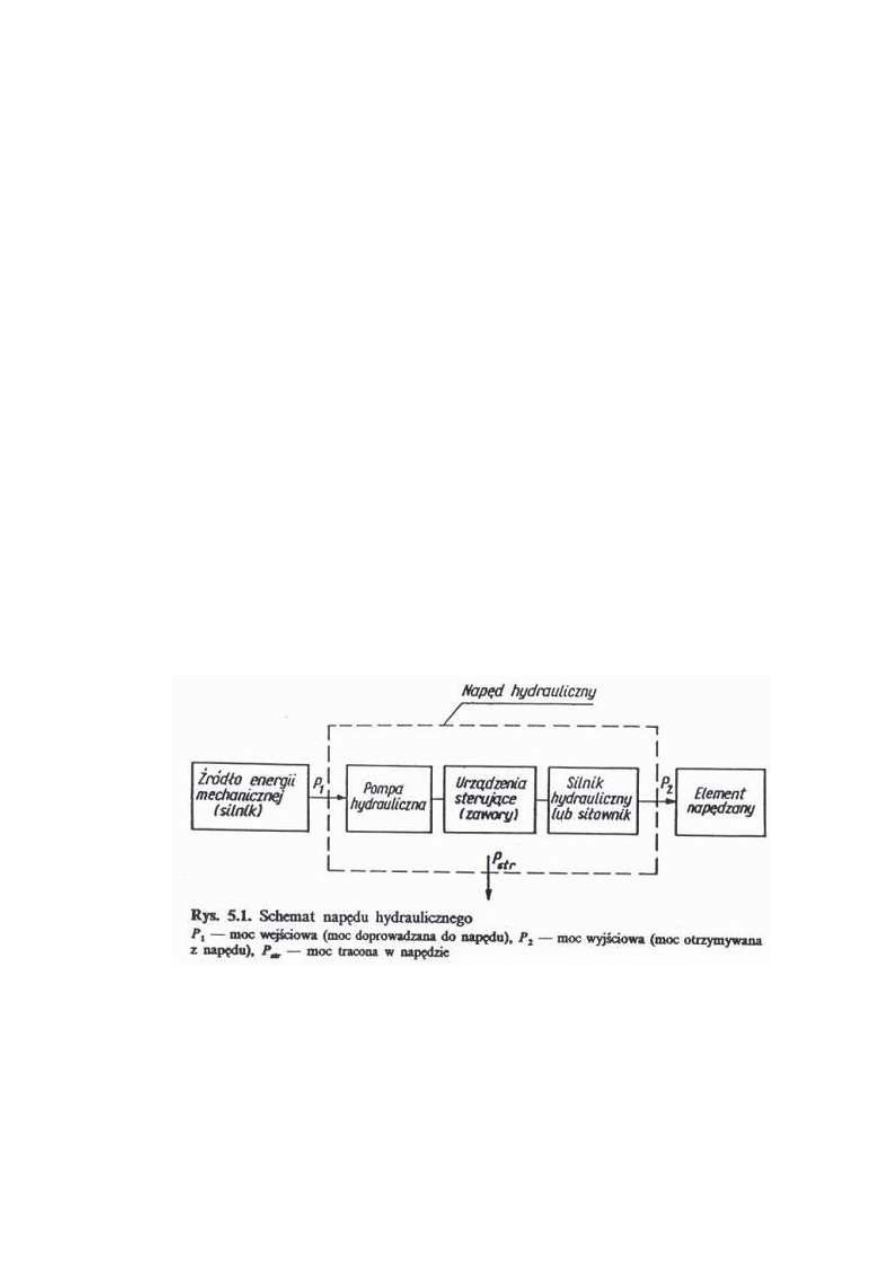
NAPĘD HYDRAULICZNY
Napędy hydrauliczne są to urządzenia służące do przekazywania energii mechanicznej z
miejsca jej wytwarzania do urządzenia napędzanego. W napędach tych czynnikiem przenoszącym
energię jest ciecz. Zasada napędu hydraulicznego jest oparta na prawie Pascala, dotyczącym
równomiernego rozchodzenia się ciśnienia w cieczy.
W zależności od sposobu przenoszenia ruchu rozróżnia się napędy hydrauliczne:
-
hydrostatyczne, których działanie opiera się na wykorzystaniu przede wszystkim energii
ciśnienia cieczy
-
hydrokinetyczne, których działanie opiera się na wykorzystaniu energii kinetycznej cieczy
W zależności od rodzaju przenoszonego ruchu rozróżnia się napędy o ruchu obrotowym i o
ruchu postępowym. W napędach hydraulicznych może też następować zamiana ruchu obrotowego na
postępowy bądź ruchu postępowego na obrotowy.
W skład mechanizmu hydraulicznego wchodzą:
-
pompy , które zamieniają dostarczoną przez silnik energię mechaniczną na energię
hydrauliczną. W napędach hydrostatycznych stosuje się pompy wyporowe, a w napędach
hydrokinetycznych – pompy wirowe
-
silniki hydrauliczne lub siłowniki, zamieniające dostarczaną przez pompę energię
hydrauliczną z powrotem na energię mechaniczną. Silniki hydrauliczne stosowane do
napędu mechanizmów o ruchu obrotowym pod względem budowy są zbliżone do pomp i
podobnie jak pompy dzieli się je na wyporowe (stosowane w napędach hydrostatycznych )
oraz wirowe (stosowane w napędach hydrokinetycznych). Do napędu mechanizmów o
5
ruchu postępowym są stosowne wyłącznie silniki hydrauliczne wyporowe, działające na
zasadzie siłowników (cylinder ze szczelnym tłokiem).
-
Zawory sterujące przepływem (czynnika energii) w układzie napędu hydraulicznego
Oprócz tych elementów niezbędne są również elementy pomocnicze: przewody łączące, zbiorniki,
filtry, akumulatory hydrauliczne, chłodnice lub podgrzewacze, a także przyrządy do pomiaru
ciśnienia, natężenia przepływu itd.
Zalety układów hydraulicznych:
-
możliwość uzyskania bardzo dużych sił, przy małych wymiarach urządzeń
-
możliwość uzyskania bezstopniowej zmiany prędkości ruchu
-
możliwość użycia małych sił do sterowania pracą ciężkich maszyn
-
możliwość zdalnego sterowania
-
możliwość zastosowania mechanizacji i automatyzacji ruchów
-
dużą trwałość elementów układów hydraulicznych oraz łatwość ich wymiany
Do wad należy zaliczyć:
-
trudności związane z uszczelnieniem elementów ruchowych; wszelkie nieszczelności
powodują przedostawanie się powietrza do obiegu, a to z kolei powoduje zakłócenia pracy
układu
-
duże straty energii na pokonywanie oporów przepływu
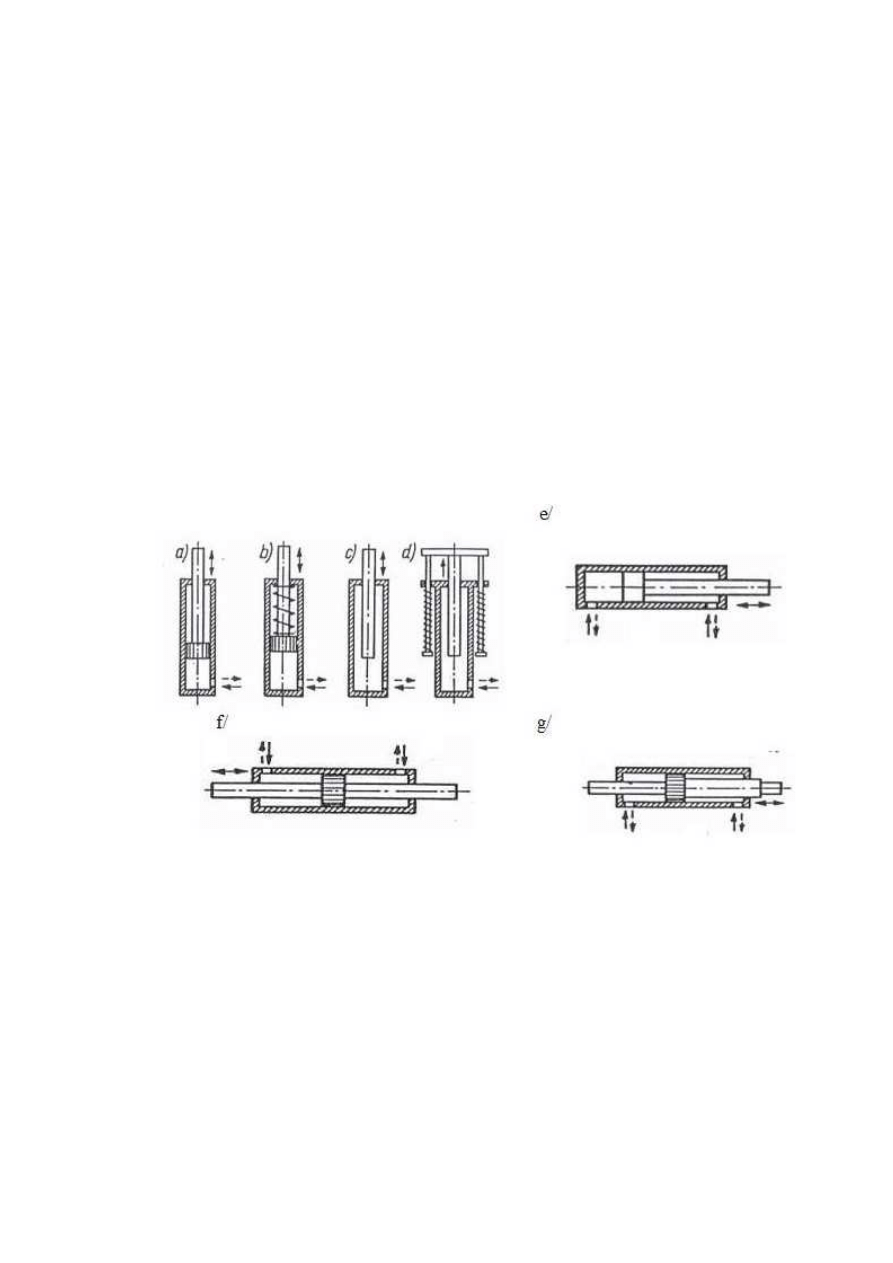
Cylindry hydrauliczne
a i b/ cylindry jednostronnego działania tłokowe
c i d/ cylindry jednostronnego działania nurnikowe
f/ cylinder jednostronnego działania teleskopowy
g/ cylinder jednostronnego działania przeponowy
Pompy
Pompa łopatkowa typu Vickersa
1- wirnik, 2- łopatka, 3- obudowa
6
Wirnik z łopatkami jest umieszczony współosiowo z otworem obudowy, który ma przekrój o kształcie
owalnym utworzonym przez 4 łuki o śr. leżących w osi wirnika. Dzięki temu pompa ma 2 przestrzenie
wsawne i 2 przestrzenie tłoczne, rozmieszczenie jest przeciwległe i odpowiednio połączone. Dzięki
symetrii konstrukcyjnego układu pompy, chwilowe siły ciśn. działające na wirnik i łopatki równoważą
się w każdym ustawieniu obracającego się wirnika. Liczba łopatek wynosi zwykle 12 lub 16 są one
dociskane, do obudowy dzieki naporowi cieczy doprowadzanej pod ciśnieniem do przestrzeni pod
łopatkami.
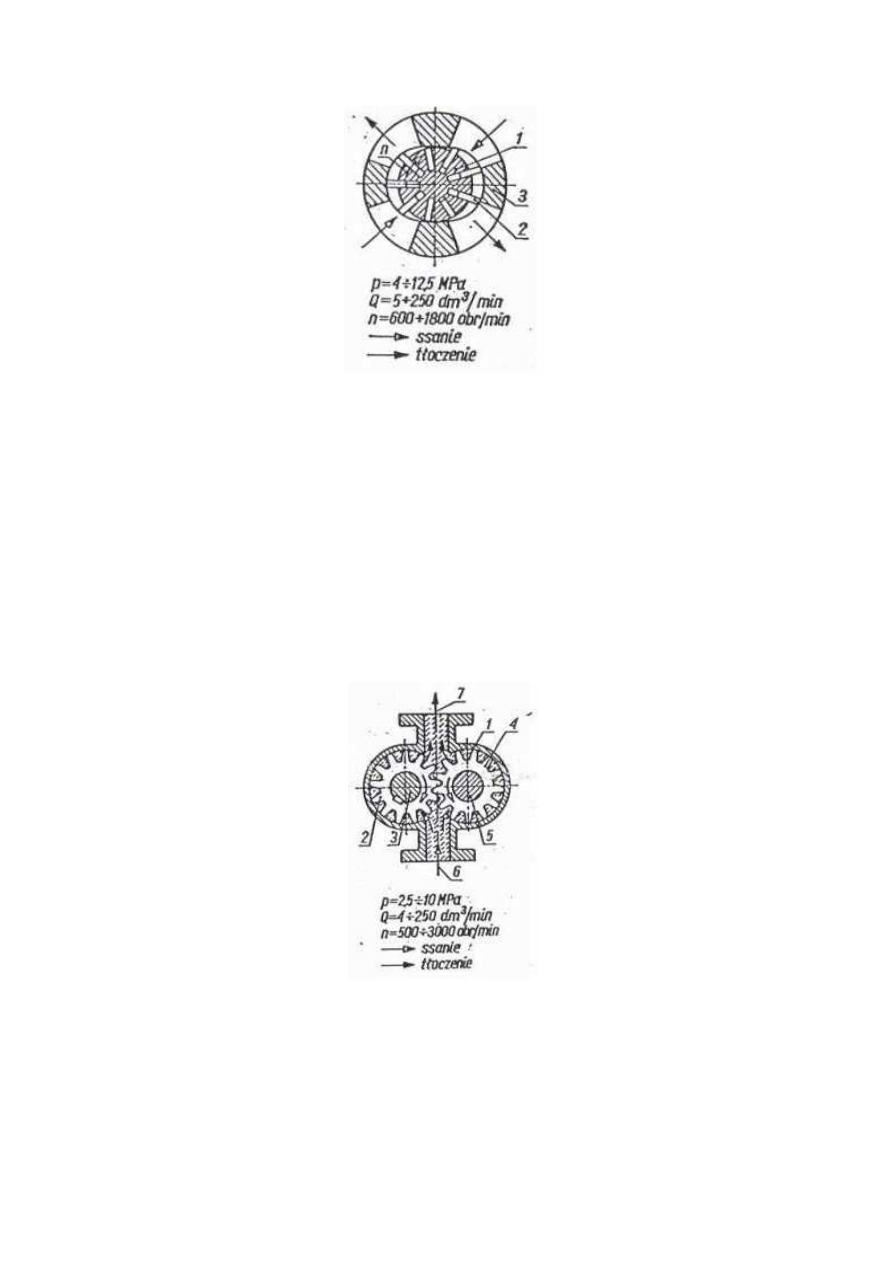
Pompa zębata
1-
korpus, 2 i 3- koło i wałek napędzający, 4 i 5- koło i wałek napędzany, 6- kanał ssawny
7- kanał tłoczny
Tworzą ją dwie zazębione ze sobą czołowe śrubowe lub daszkowe koła zębate. Jedno z nich
napędzane jest od silnika. Podczas obracania się kół zębatych w kierunku roboczym w komorze
ssawnej ciecz wypełnia międzyzębne wnęki kół i jest przymusowo przemieszczana do komory
tłocznej. Nadciśnienie w komorze tłocznej utrzymuje się w skutek wyciskania cieczy spomiędzy
zazębiających się zębów kół. Jednocześnie w wyniku napływania cieczy pomiędzy zęby kół
wyzębiające się w komorze ssawnej i jednoczesnego unoszenia się z niej cieczy do komory tłocznej, w
komorze ssawnej panuje podciśnienie. Podczas pracy pompy zębatej wskutek istniejącej różnicy
ciśnień przemieszczana ciecz powraca z komory tłocznej poprzez szczeliny pomiędzy wewnętrznymi
ś
ciankami korpusu oraz czołami i wierzchołkami zębów do komory ssawnej.
7
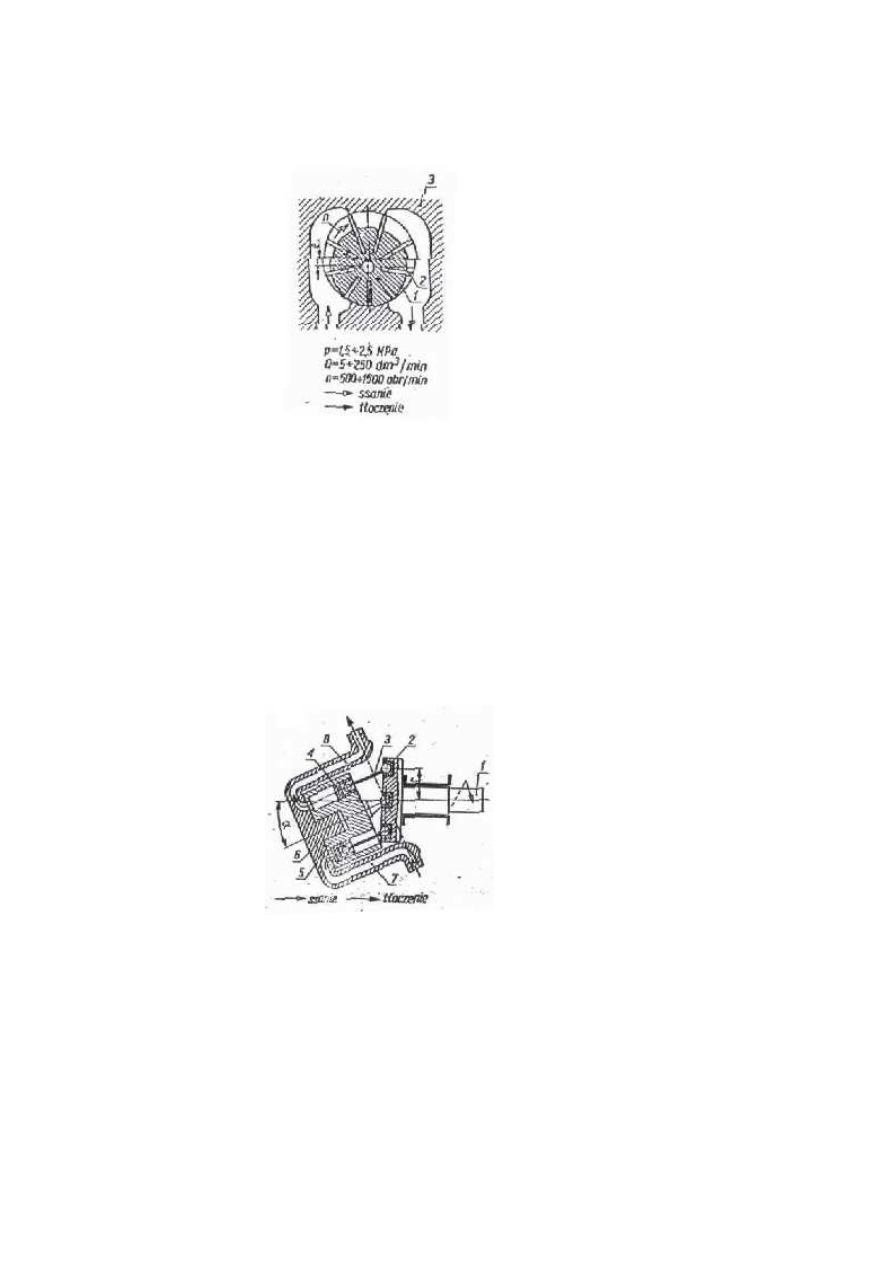
Pompa łopatkowa mimośrodkowa
1- wirnik, 2- łopatka, 3-obudowa, 4- kanał ssawny, 5- kanał tłoczny, e-stała mimośrodkowość
Obracający się wirnik ma promieniowe wycięcia w których znajdują się szurliwe łopatki. Wirnik i
łopatki umieszczony jest mimośrodkowo w cylindrycznej obudowie. Łopatki przylegają szczelnie do
obudowy. Przestrzeń między łopatkami zwiększa się w czasie jednej połowy obrotu wirnika i maleje
w drugiej połowie obrotu. Kanał dolotowy jest w miejscu powiększania się przestrzeni
międzyłopatkowej, a kanał wylotowy – gdzie przestrzenie maleją. Zmieniając mimośrodkowość
wirnika regulujemy wydajność pompy.
Pompa tłokowa osiowa
1- wałek napędzający, 2- tarcza, 3-drążek tłokowy, 4-tłok, 5- obracający się wraz z tarczą 2
6- nieruchoma obudowa z czopem centralnym, 7- kanał ssawny, 8- kanał tłoczny
Pompa o ruchomym korpusie, w którym umieszczone są cylindry. Tłoki wykonują ruchy przestrzenne.
Każdy tłok porusza się względem cylindra, który z kolei obraca się wraz z korpusem dookoła osi.
Podczas przekręcania się wałka pędnego wraz tarczą pędną o kąt 180
°
i jednocześnie przekręcania się korpusu zawierającego cylindry o taki sam kąt. Tłok wykonuje pełny
skok, a cylinder jest połączony z komorą ssawną. W czasie dalszego półobrotu wałka i korpusu tłok
wykonuje suw w kierunku przeciwnym i wytłacza zassaną uprzednio ciecz z cylindra.
Pompy promienne
1- tłoczek, 2- wirnik, 3- nieruchoma przegroda, 4- obudowa, 5- kanał ssawny, 6- kanał tłoczny, e-
zmienna mimośrodkowość
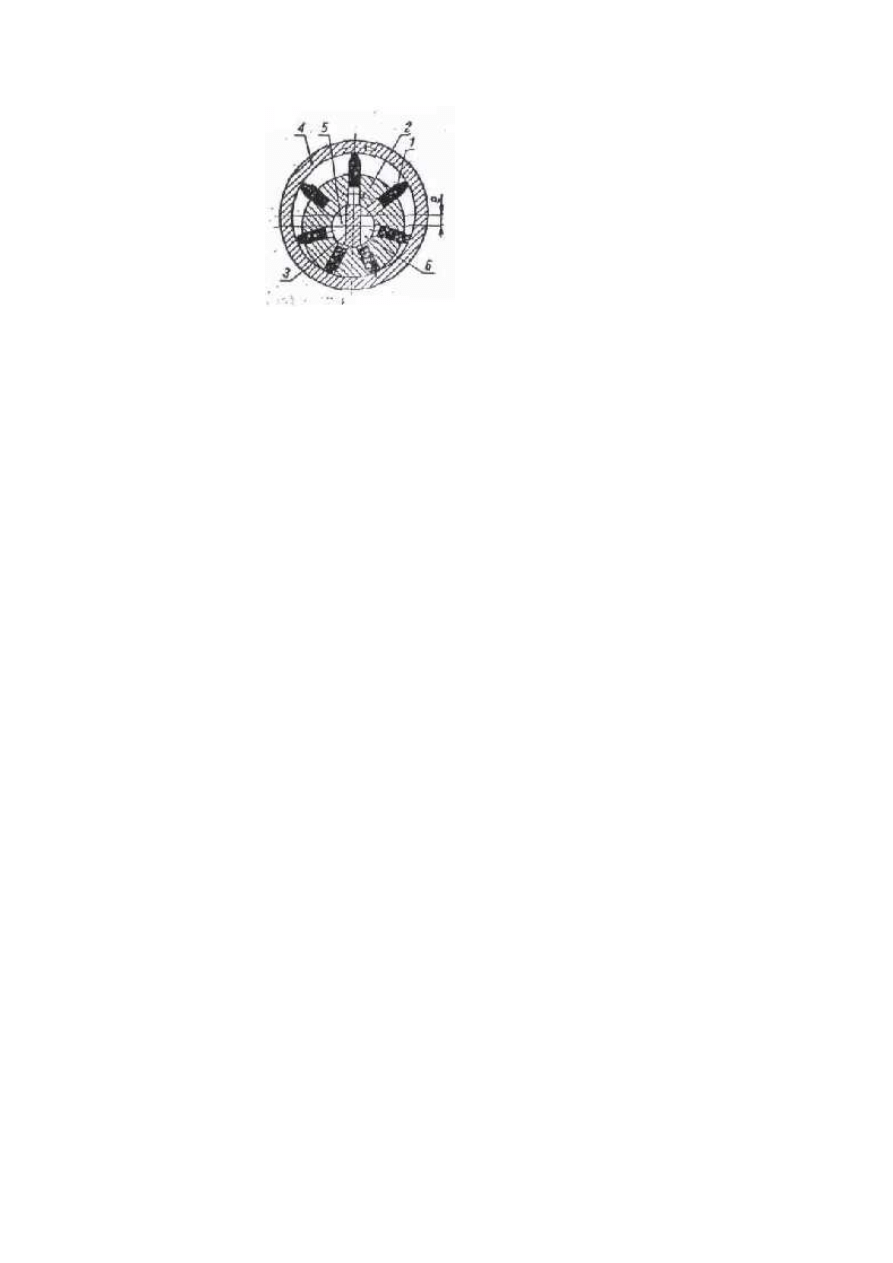
8
Mają układ rzędowy lub gwiazdkowy. Gwiazdkowy składa się z wirnika, w którym znajdują się
cylindry i tłoki. Wirnik obraca się na wałku zawierającym dwie wyfrezowane komory – tłoczną i
ssawną, połączone kanałem ssawnym z końcówka pompy. Rozdzielone są przegrodą. Tłoki opierają
się dzięki naciskowi sprężyn lub siłom odśrodkowym o pierścień obudowy względem, której wirnik
jest przesunięty o mimośrodkowość e. Ciecz wytłaczana z komory tłocznej jest zasysana z komory
ssawnej do cylindra, a później wytłaczana do komory tłocznej. Liczba cylindrów wynosi zwykle 5 do
9.
Do elementów sterujących napędów hydraulicznych zaliczamy:
- zawory ciśnieniowe spełniające następujące zadania:
-
zawory bezpieczeństwa zabezpieczają układy hydrauliczne przed zbyt wysokim ciśnieniem
-
zawory przelewowe utrzymują określone ciśnienie w układzie hydraulicznym
-
zawory kolejności działania utrzymują określone ciśnienie przed zaworem niezależnie od
ciśnienia za zaworem
-
zawory redukcyjne utrzymują określone ciśnienie za zaworem niezależnie od zmian
ciśnienia przed zaworem
-
zawory różnicowe utrzymują stałą różnicę ciśnień przed i za zaworem
-
zawory proporcjonalne zapewniają stały stosunek ciśnień przed i za zaworem
- zawory natężeniowe spełniają następujące zadania:
-
zawory odcinające zamykają lub otwierają przepływ cieczy
-
zawory rozdzielcze zwane też rozdzielaczami hydraulicznymi, kierują ciecz do
odpowiednich przewodów i odbiorników
-
zawory zwrotne przepuszczają strumień cieczy tylko w jednym kierunku
-
zawory dławiące sterują w sposób ciągły natężeniem przepływu cieczy
-
regulatory przepływu dwudrogowe zapewniają stałe natężenie przepływu, niezależnie od
zmian ciśnienia w instalacji
-
regulatory przepływu trójdrogowe sterują natężeniem przepływu, kierując w razie potrzeby
część strugi cieczy do bocznego odgałęzienia
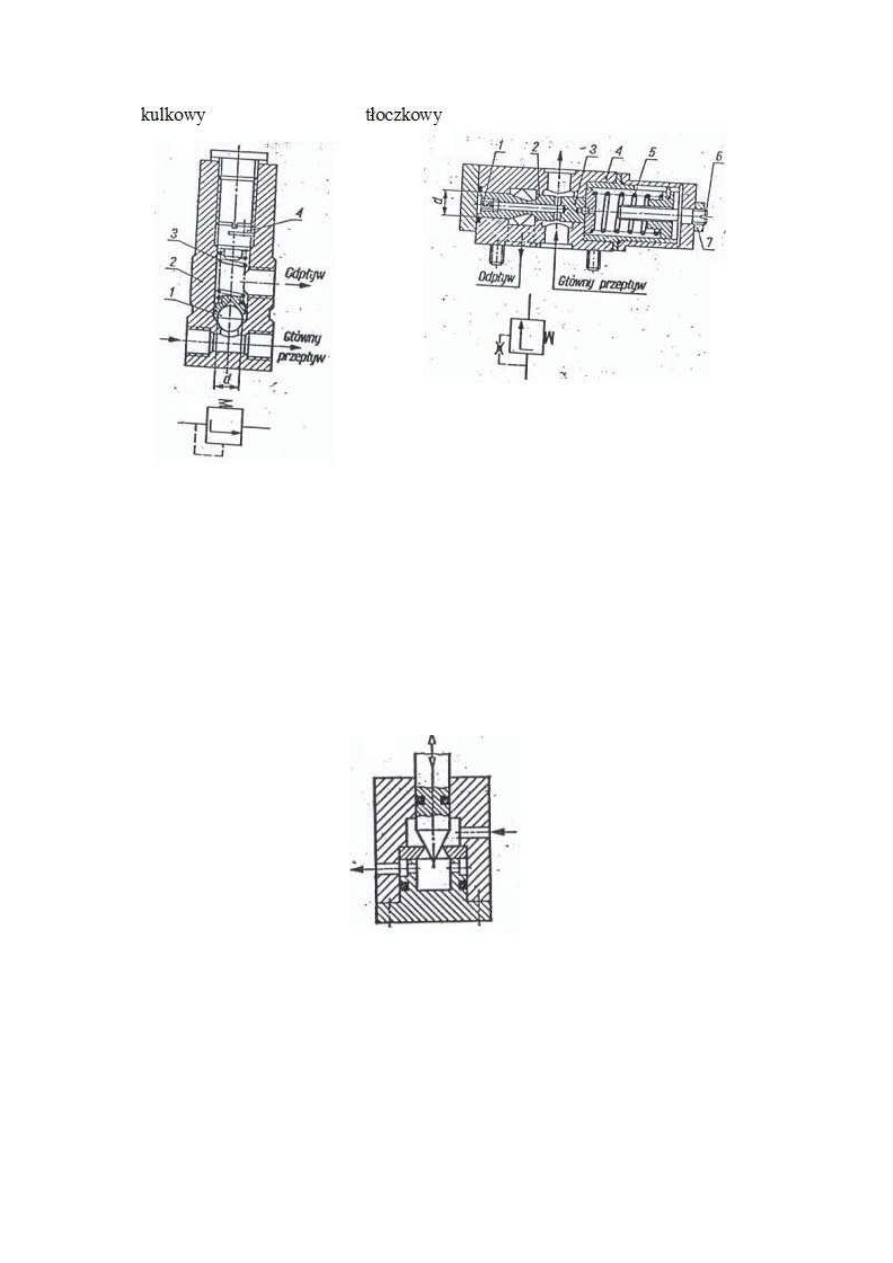
Zawór bezpieczeństwa ( przelewowy)
Każdy układ hydrauliczny powinien być zabezpieczony przed przeciążeniami. Przed podwyższeniem
ciśnienia ponad dopuszczalną wartość. Zabezpieczenie takie zapewnia się przez włączenie na
odgałęzieniu przewodu tłocznego pompy zaworu bezpieczeństwa, który otwiera się samoczynnie w
przypadku podwyższenia się ciśnienia do określonej wartości. Często tylko część cieczy dostarczonej
przez pompę ma dopływać do urządzenia wykonawczego, a reszta powinna odpływać do zbiornika lub
innej gałęzi układu, w której panuje niższe ciśnienie. W takich warunkach zawór przepuszczający
nadmiar cieczy z odgałęzienia roboczego jest nazywany zaworem przelewowym, który spełnia
jednocześnie zadania zaworu bezpieczeństwa.
9
kulkowy:
1-kulka, 2- korpus, 3- sprężyna, 4- śruba regulacyjna, d- średnica czynnej powierzchni
tłoczkowy:
1- szczelina dławiąca, 2- krawędź sterująca tłoczka, 3 i 4- korpus, 5- sprężyna, 6- śruba regulacyjna,
7- przeciwnakrętka
Gorsze są zawory kulkowe ponieważ szybciej zużywa się gniazdo, którym osadzona jest kulka dlatego
częściej stosuje się zawory tłoczkowe.
Dławiki
Sterują one rozdzielaniem energii. Dławienie polega na rozpraszaniu cieczy oparte może być na
lepkości cieczy.
Strata ciśnienia w typie dławika kryzowego iglicowego jest sprowadzona do minimum w skutek tarcia
cieczy.
Dławik iglicowy
NAPĘDY PNEUMATYCZNE
Niewątpliwą cechą przemawiająca na korzyść napędów pneumatycznych jest prosta i
niezawodna konstrukcja, szczególnie podczas realizowania ruchu liniowego. Element wyjściowy
napędu uzyskuje dość dużą prędkość, dochodzącą do 1 m/s, przy przemieszczeniach liniowych oraz 60
obr/min przy obrotowych. Zasilane mogą one być ze standardowej, przemysłowej sieci sprężonego
powietrza o ciśnieniu 0,5 – 0,6 MPA. Napędy te mogą pracować ponadto w środowisku agresywnym i
zagrożonym pożarem. Posiadają duzy współczynnik sprawności, około 80%, dużą niezawodność oraz
trwałość, mały stosunek masy napędu do uzyskanej moc, są odporne na wibracje, a ich cena jest
stosunkowo niska.
10
Do wad napędów pneumatycznych zaliczyć należy niestałość prędkości członu wyjściowego
napędu przy zmianach obciążeń, spowodowaną ściśliwością czynnika roboczego, ograniczoną liczbę
punktów pozycjonowania (najczęściej dwa), konieczność wyhamowania członu wyjściowego napędu
w końcowej fazie ruchu, gdyż jego uderzenia przy dużej prędkości w twardy zderzak (np. denko
cylindra siłownika) powodują znaczne przeciążenia dynamiczne, głośną prace napędu.
Pod względem funkcjonalnym podzespoły napędu pneumatycznego dzielimy na bloki:
a)
Przygotowania sprężonego powietrza – którego zadaniem jest odpowiednie spreparowanie
powietrza, które następnie tłoczone będzie do instalacji przez sprężarkę. Powietrze pobierane
z otoczenia ( hali przemysłowej ) jest wilgotne, w wyniku czego możliwe jest wystąpienie
korozji, poza tym jest ono zanieczyszczone cząstkami pyłów czy też związkami chemicznymi.
Zadaniem omawianego bloku jest wyeliminowanie wszystkich niedogodności.
-
oddzielacz wilgoci – eliminuje możliwość korozji spowodowaną tłoczeniem powietrza
zawierającego w sobie wilgoć (np. parę wodną), korozja, osadzanie się lodu, szronu może
być powodem zmniejszenia się przekrojów czynnych przepływowych przewodów
zasilających
-
smarownica – rozpyla olej, niezbędny do smarowania przemieszczających się wzajemnie
części elementów wykonawczych i rozdzielaczy
-
zawór redukcyjny – pozwala nastawiać optymalne ciśnienie do sprężonego powietrza
-
filtr powietrza – służy do usuwania z powietrza zasilającego napęd cząstek
zanieczyszczeń, dzielimy je na
o
mechaniczne – odpowiedzialne za wyłapywanie cząstek na drodze
przepuszczania powietrza przez odpowiednią tkaninę, papier lub odwirowanie.
o
adsorpcyjne – usuwają cząstki zanieczyszczeń poprzez pochłanianie ich przez
odpowiedni związek chemiczny
-
manometr – kontrola i regulacja ciśnienia zasilania
b)
Blok sterowania przepływem sprężonego powietrza – zawiera urządzenia, za pomocą których,
zgodnie z założonym programem działania robota, otwiera się lub zamyka dostęp medium
roboczego do roboczych przestrzeni elementów wykonawczych (siłowników). Elementami
sterowania przepływem powietrza są tzw. rozdzielacze pneumatyczne (zawory rozdzielające)
c)
Blok elementów wykonawczych napędu – siłowniki liniowe jednostronnego lub
dwustronnego działania, rzadziej siłowniki z przesunięciem kątowym – wahadłowe. Każdy
siłownik realizuje swój cykl roboczy w kolejności określonej procesem technologicznym.
Przełączenie odpowiedniego rozdzielacza następuje wg programu, realizowanego przez układ
sterujący robota.
Sterowanie zaworami pneumatycznymi odbywa się poprzez dwustanowe przekaźniki:
-
elektryczne
-
pneumatyczne
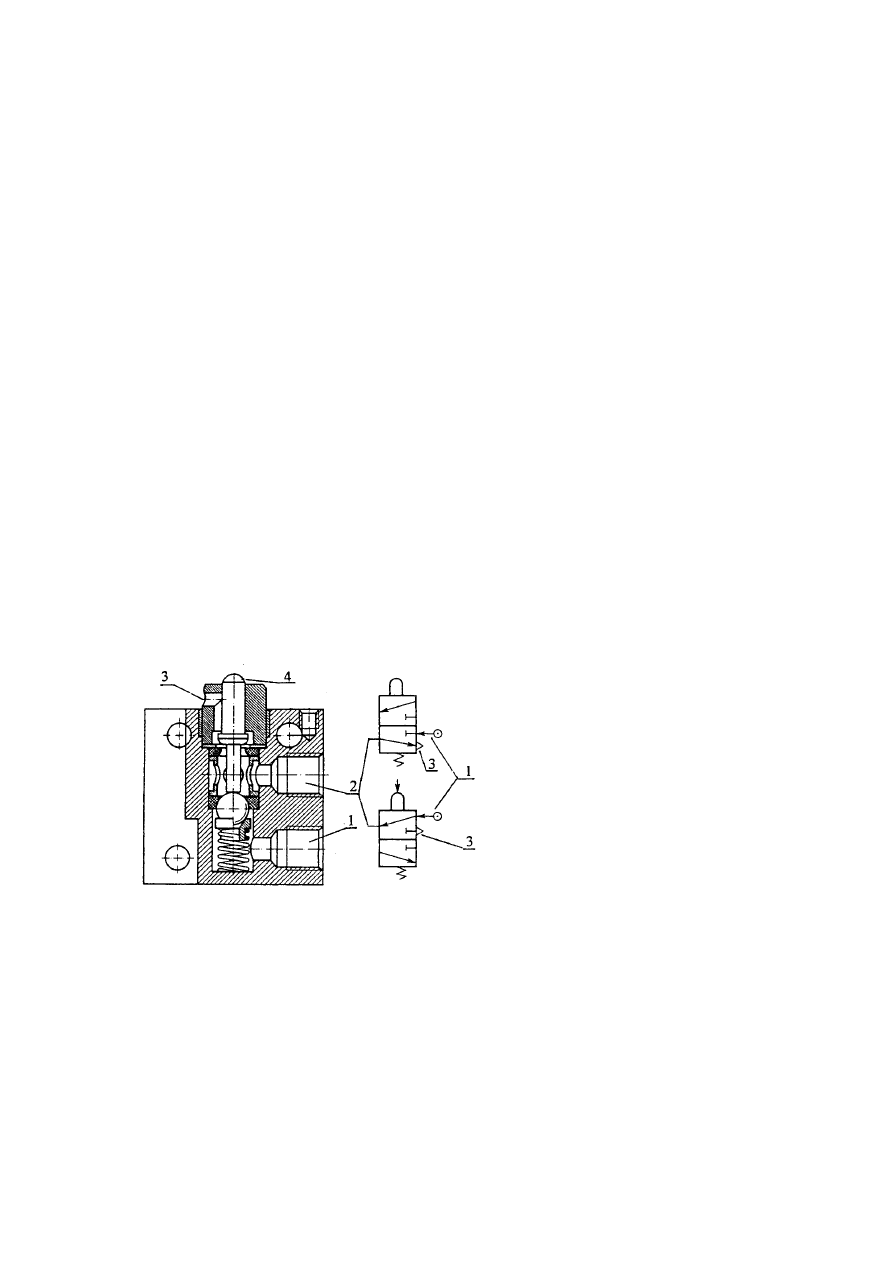
Pneumatyczne zawory
rozdzielające
1 – przewody
doprowadzające; 2 –
przewody odprowadzające;
3 – odpływ powietrza do
atmosfery; 4 –
elektromagnetyczny zawór
rozdzielający
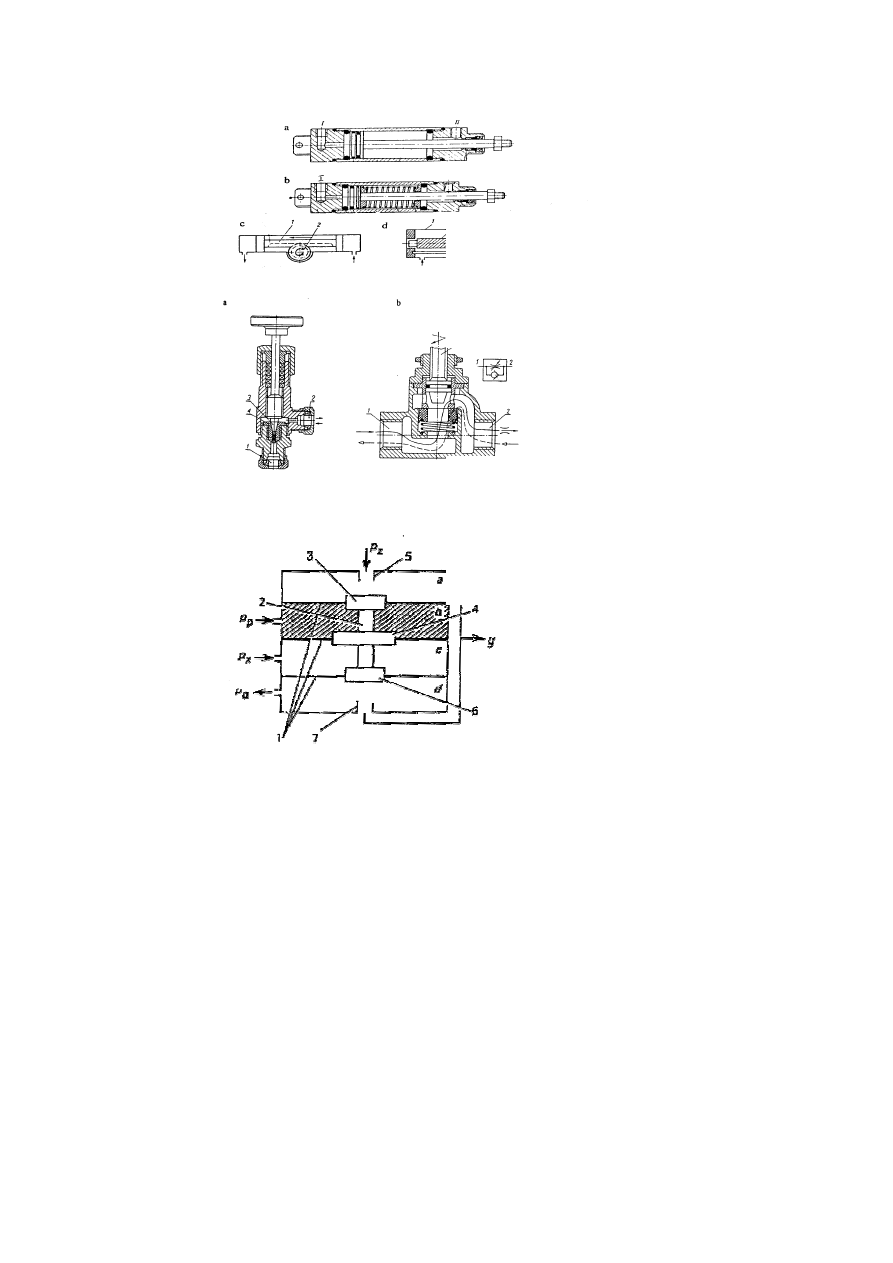
Siłownik liniowy:
a – jednostronnego i b –
dwustronnego działania
Siłowniki z przesunięciem
kątowym:
c i d; 1 – zębatka; 2 – wał
wyjściowy; 3 – śruba;
4 – nakrętka; 5 – prowadnica
11
Przekaźnik pneumatyczny zbudowany jest w postaci czterech komór utworzonych przez elastyczne
membrany o różnych powierzchniach efektywnych
Wykorzystanie sprężonego powietrza zapewnia wyjściowemu członowi napędu pneumatycznego
osiągniecie dużych prędkości, co oznacza, że tłok siłownika dochodzi do zadanej pozycji z dużą
prędkością. Wymaga to stosowania specjalnych urządzeń hamujących, gdyż inaczej spowodowałoby
to zderzenia tłoka ze zderzakiem mechanicznym ograniczającym ruch tłoka. Konieczne zatem staje się
wyhamowanie tłoka w końcowej fazie ruchu.
Można to uzyskać przez:
a)
dławienie wpływu czynnika roboczego z opróżnianej komory siłownika
b)
wyhamowanie tłoka za pomocą urządzeń mechanicznych (amortyzatorów), a także
pneumatycznych lub hydraulicznych
Hamulce wykorzystywane w pneumatycznych zespołach napędowych dzielimy na:
a)
hamulce cierne
-
duża sprawność
-
nie obciąża siłownika podczas ruchu
-
duże prędkości ruchu
-
duży wpływ na prędkość i dokładność
Przekaźnik pneumatyczny
1 – membrany; 2 – trzpień;
3,4,6 – sztywnik membrany;
5,7 – dysze
Zawory dławiące: a – iglicowy i
b – grzybkowy
1 – dopływ powietrza; 2 –
odpływ powietrza; 3 – element
dławiący; 4 - gniazdo
12
b)
hamulce hydrauliczne
-
mały wpływ obciążenia na prędkość i dokładność pozycjonowania
-
niemożność uniknięcia skutków tarcia w obwodzie hydraulicznym
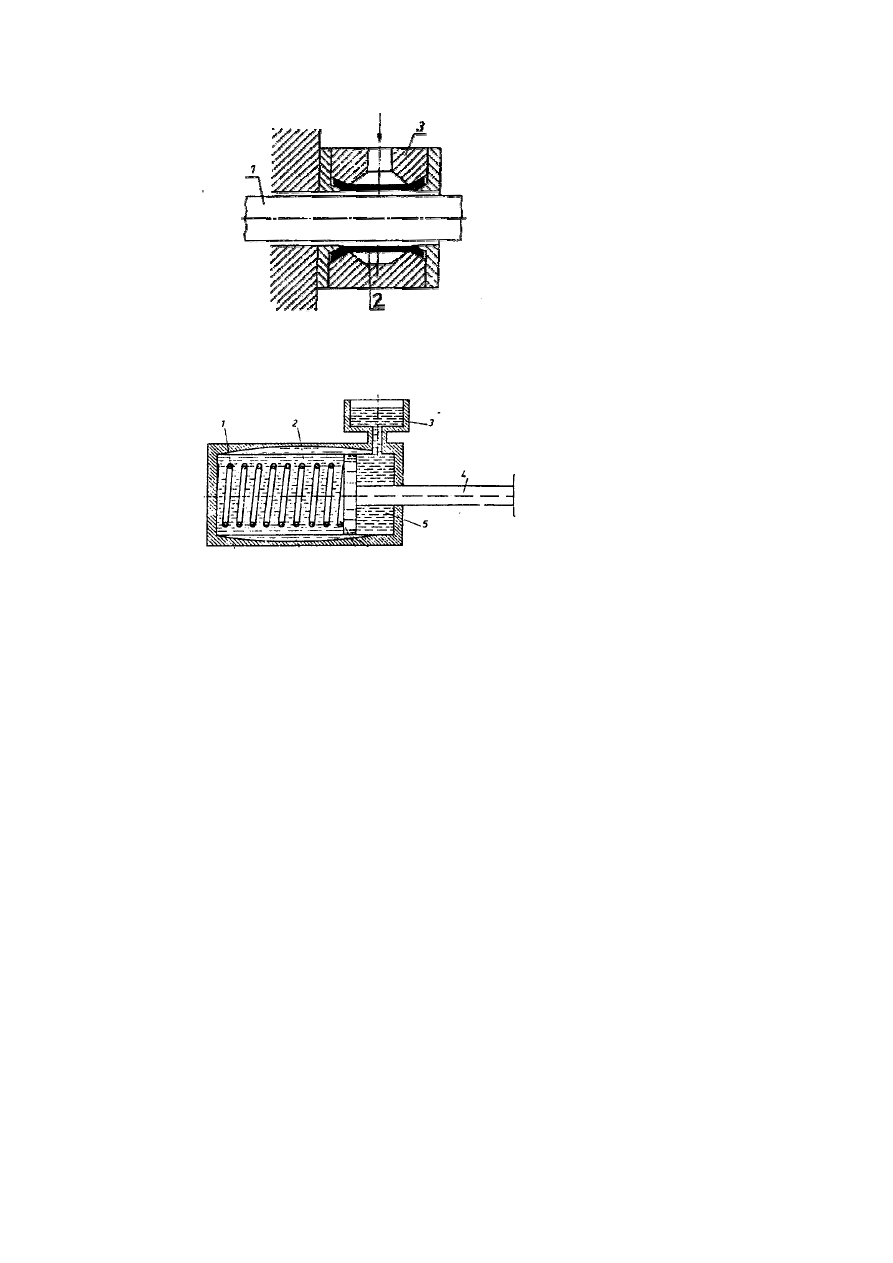
Hamulec cierny
pneumatyczny
1 – trzpień tłoczyska; 2 –
okładziny cierne; 3 –
obudowa
Hamulec hydrauliczny
1 – sprężyna; 2,5 – komory
przelewowe; 3 – zbiornik;
4 – tłoczysko
Wyszukiwarka
Podobne podstrony:
napedy pneumatyczne hydrauliczne i elektryczne, Automatyka i Robotyka, Semestr I, Maszynoznawstwo, l
Naped hydrauliczny, Automatyka i Robotyka, Semestr 1, Maszynoznastwo, Napędy elektryczne pneumatyczn
Napędy elektryczne pneumatyczne i hydrauliczne, Napędy pneumatyczne, elektryczne, hydrauliczne, POLI
Napędy pneumatyczne, Automatyka i Robotyka, Semestr 1, Maszynoznastwo, Napędy elektryczne pneumatycz
Napędy elektryczne,pneumatyczne i hydrauliczne
Napędy i sterowanie hudraulicznie - Pytania-zestaw 2, Pneumatyka - Hydraulika
Napędy i sterowanie hydrauliczne i pneumatyczne
Napędy i sterowanie hydrauliczne i pneumatyczne materiały do ćwiczeń audytoryjnych
Sprawozdanie katalogi, AGH, Semestr 5, Napędy i sterowanie hydrauliczne i pneumatyczne, NiS, pneumat
Napędy hydrauliczne i pneumatyczne, Pneumatyka - Hydraulika
sprawko napedy pneumatyka, AGH, semestr 5, Metrologia (Jastrzębski), z chomika, pneumatyka sprawko,
Badanie siłowników pneumatycznych - ćwiczenie, Pneumatyka - Hydraulika
Napędy pneumatyczne Podstawowe informacje i pojęcia Budowa i zasada działania Przykłady
Napedy i ster. hydrauliczne(obr.), Księgozbiór, Studia, LOOS
Projekt pneumatycznego siłownika tłokowego (Uniwersytet Śląski), Pneumatyka - Hydraulika
12 Napędy pneumo hydrauliczne
Analizowanie ukladow pneumatycznych i hydraulicznych
07 Analizowanie układów pneumatycznych i hydraulicznych
więcej podobnych podstron