Elektronika 2000
Elektronika dla Wszystkich
Maj 2016
52
Do czego to s
ãuİy?
Licznik nie ma baterii ani czujnika
obrotów ko
áa, a zasilanie i informacjĊ
o pr
ĊdkoĞci pobiera z dynama rowerowe-
go wbudowanego w piast
Ċ. Konstrukcja
lekkiego niedrogiego i wodoszczelnego
uk
áadu w domowych warunkach wymaga
pewnych kompromisów, dlatego ten licz-
nik rowerowy nie ma
Īadnego przycisku
i pr
ĊdkoĞü wyĞwietla wyáącznie w czasie
jazdy. Ustawienie rozmiaru ko
áa odbywa
si
Ċ przez (jednorazowe) podáączenie licz-
nika do przej
Ğciówki USB/RS232 TTL.
Najwa
Īniejsze zaáoĪenie to skrajny
minimalizm i niska cena elementów, ale
metod
Ċ pomiaru prĊdkoĞci moĪna roz-
win
ąü, dodając wiĊkszy wyĞwietlacz
i dopisuj
ąc dodatkowe funkcje. Niska
cz
ĊstotliwoĞü napiĊcia generowa-
nego przez dynamo wbudowane
w piast
Ċ wymusza zastosowanie
du
Īego bufora energii dla ukáadu
lub minimalizacj
Ċ poboru prądu.
W tym uk
áadzie postanowiono zmi-
nimalizowa
ü pobór prądu, dlatego
mikrokontroler prawie ca
áy czas tak-
towany jest cz
ĊstotliwoĞcią 32kHz.
Uk
áad zostaá przetestowany z dyna-
mem DH-3N20, ale b
Ċdzie popraw-
nie wspó
ápracowaá z kaĪdym dyna-
mem po ewentualnym dopasowaniu
programu i cz
ĊstotliwoĞci granicznej
filtru RC. Opcjonalna, drukowana
w 3D obudowa pozwala zabezpie-
czy
ü ukáad przed czynnikami atmo-
sferycznymi.
Jak to dzia
ãa?
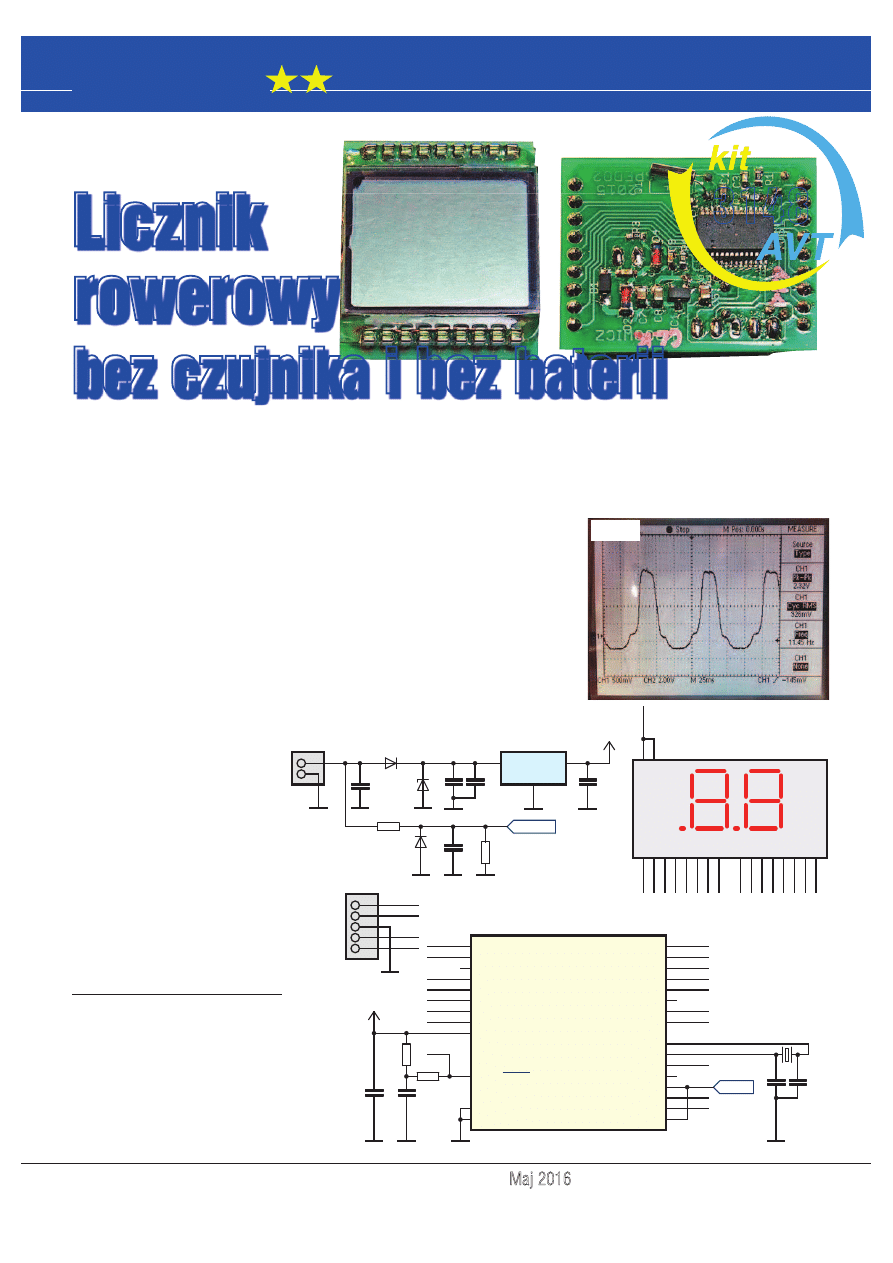
Schemat przedstawiono na rysunku
1. Napi
Ċcie z dynama podáączone do
z
áącza SUP jest prostowane i filtro-
wane przez D1, C7 i C8, a nast
Ċpnie
stabilizowane przez linowy regu-
lator napi
Ċcia IC1 i kondensator
C5. Kondensator C4 chroni uk
áad
przed impulsami ESD, które mog
ą
pojawi
ü siĊ na wejĞciu podczas montaĪu.
Dioda Zenera D2 zabezpiecza stabiliza-
tor IC1 i kondensatory C7 oraz C8 przed
nadmiernym napi
Ċciem wejĞciowym,
które mo
Īe zostaü wygenerowane przez
nieobci
ąĪone dynamo.
Napi
Ċcie przemienne z dynama rowe-
rowego ma cz
ĊstotliwoĞü proporcjonalną
do pr
ĊdkoĞci obrotowej koáa. Ukáad R3,
D4, C9 i R4 formuje impulsy o takim
samym okresie jak napi
Ċcie zasilające,
by mikrokontroler IC2 móg
á zmierzyü
cz
ĊstotliwoĞü napiĊcia zasilającego. Ele-
menty R3 i D4 ograniczaj
ą napiĊcie do
warto
Ğci bezpiecznej dla mikrokontrolera
zasilanego napi
Ċciem 3,3V, a C9 i R4 to
dolnoprzepustowy filtr przeciwzak
áóce-
niowy. Cz
ĊstotliwoĞü tego filtru zosta-
áa dobrana tak, Īeby umoĪliwiü równieĪ
transmisj
Ċ wg protokoáu RS232-TTL
z pr
ĊdkoĞcią 1200 bodów.
Uformowane impulsy nie s
ą ideal-
nie prostok
ątne (rysunek 2), ale mikro-
kontrolerowi to nie przeszkadza, dopóki
LCD1
32768Hz
12.5p
12.5p
100n
10k
470
VCC
100n
PIC16LF1906-I/SS
B
P
#
1
1
D
P
1
2
1
E
3
1
D
4
1
C
5
D
P
2
6
2
E
7
2
D
8
2
C
9
2
B
1
0
2
A
11
2
F
1
2
2
G
1
3
1
B
1
4
1
A
1
5
1
F
1
6
1
G
1
7
B
P
#
2
1
8
LCD2.0
Q1 C1
C2
C3
R1
R2
C6
VPP/MCLR
1
SEG12/AN0/RA0
2
SEG7/AN1/RA1
3
COM2/AN2/RA2
4
SEG15/COM3/AN3/RA3
5
SEG4/T0CKI/RA4
6
SEG5/AN4/RA5
7
VSS#1
8
SEG2/CLKIN/RA7
9
SEG1/CLKOUT/RA6
10
T1CKI/T1OSO/RC0
11
T1OSI/RC1
12
SEG3/RC2
13
SEG6/RC3
14
RC4/T1G/SEG11
15
RC5/SEG10
16
RC6/SEG9/TX
17
RC7/SEG8/RX
18
VSS#2
19
VDD
20
RB0/AN12/INT/SEG0
21
RB1/AN10/SEG24
22
RB2/AN8/SEG25
23
RB3/AN9/SEG26
24
RB4/AN11/COM0
25
RB5/AN13/COM1
26
RB6/SEG14/ICSPCLK
27
RB7/SEG13/ICSPDAT
28
IC2
C
O
M
COM
D
P
2
DP2
2
G
2G
2
E
2E
2
D
2D
2
C
2C
2
B
2B
D
P
1
DP1
1
G
1G
1
F
1F
1
E
1E
1
D
1D
1
C
1C
1
B
1B
1
A
1A
VPP
SPEED
2
F
2F
2
A
2A
1
2
3
4
5
PROG
2D
2C
VPP
VCC
VPP/MCLR
VDD
VSS
ICSPDAT
ICSPCLK
MBR0520LT
100n
12V
MCP1703CB
10u
10u
10u
VCC
2k
470n
10k
D1
C4
D2
GND
VI
3
1
VO
2
IC1
C5
C7
C8
R3
C9
R4
D
4
1
2
SUP
SPEED
SUPPLY
INPUT
Rys. 1
Rys. 2
Licznik
rowerowy
bez czujnika i bez baterii
3148
Elektronika dla Wszystkich
Maj 2016
53
Elektronika 2000
warto
Ğü szczytowa
napi
Ċcia jest wyĪsza
ni
Ī minimalne napiĊ-
cie wysokiego stanu
logicznego
(VIH
w karcie katalogo-
wej mikrokontrole-
ra) i ni
Īsza niĪ maksymalne dopuszczal-
ne dla danego mikrokontrolera napi
Ċcie
na pinie (Vdd + 0,3V). Kondensatory
C7 i C8 s
ą buforem energii dla ukáadu
pomi
Ċdzy kolejnymi okresami napiĊcia
z dynama. W czasie postoju wy
Ğwietlacz
LCD1 jest wygaszony, poniewa
Ī energia
zgromadzona w kondensatorach C7, C8
i C5 wystarcza do zasilania uk
áadu tylko
przez nieco ponad sekund
Ċ. Na podstawie
rozmiaru ko
áa i czĊstotliwoĞci impulsów
na linii SPEED mikrokontroler wylicza
chwilow
ą prĊdkoĞü roweru i wyĞwietla ją
na wy
Ğwietlaczu LCD1.
Kondensator C6 filtruje napi
Ċcie zasi-
lania IC2, a R1, R2 i C3 to zalecany przez
producenta uk
áad resetu mikrokontrolera.
Oscylator kwarcowy Q1 i kondensatory
C1 i C2 to podstawa czasu umo
Īliwiająca
dok
áadny pomiar prĊdkoĞci. Wbudowany
w mikrokontroler oscylator RC okaza
á siĊ
bowiem niewystarczaj
ąco dokáadny. Przy-
porz
ądkowanie poáączeĔ pomiĊdzy IC2
a LCD1 jest wymuszone ch
Ċcią uprosz-
czenia projektu PCB.
Timer 1 mikrokontrolera skonfiguro-
wany w trybie Gate Toggle Mode i tak-
towany sygna
áem oscylatorem Q1 mierzy
okres sygna
áu na pinie 15. RdzeĔ mikro-
kontrolera dla oszcz
ĊdnoĞci energii jest
równie
Ī taktowany 32kHz i przeáączany
jest na wi
Ċkszą czĊstotliwoĞü wyáącznie
na czas obliczania pr
ĊdkoĞci i aktualiza-
cji wy
Ğwietlacza. Dodatkowo do sygnaáu
SPEED pod
áączony jest pin 18, to jest
pin odbiorczy USART, którym mikro-
kontroler w trybie
ustawiania
roz-
miaru ko
áa odbie-
ra obwód podany
w centymetrach.
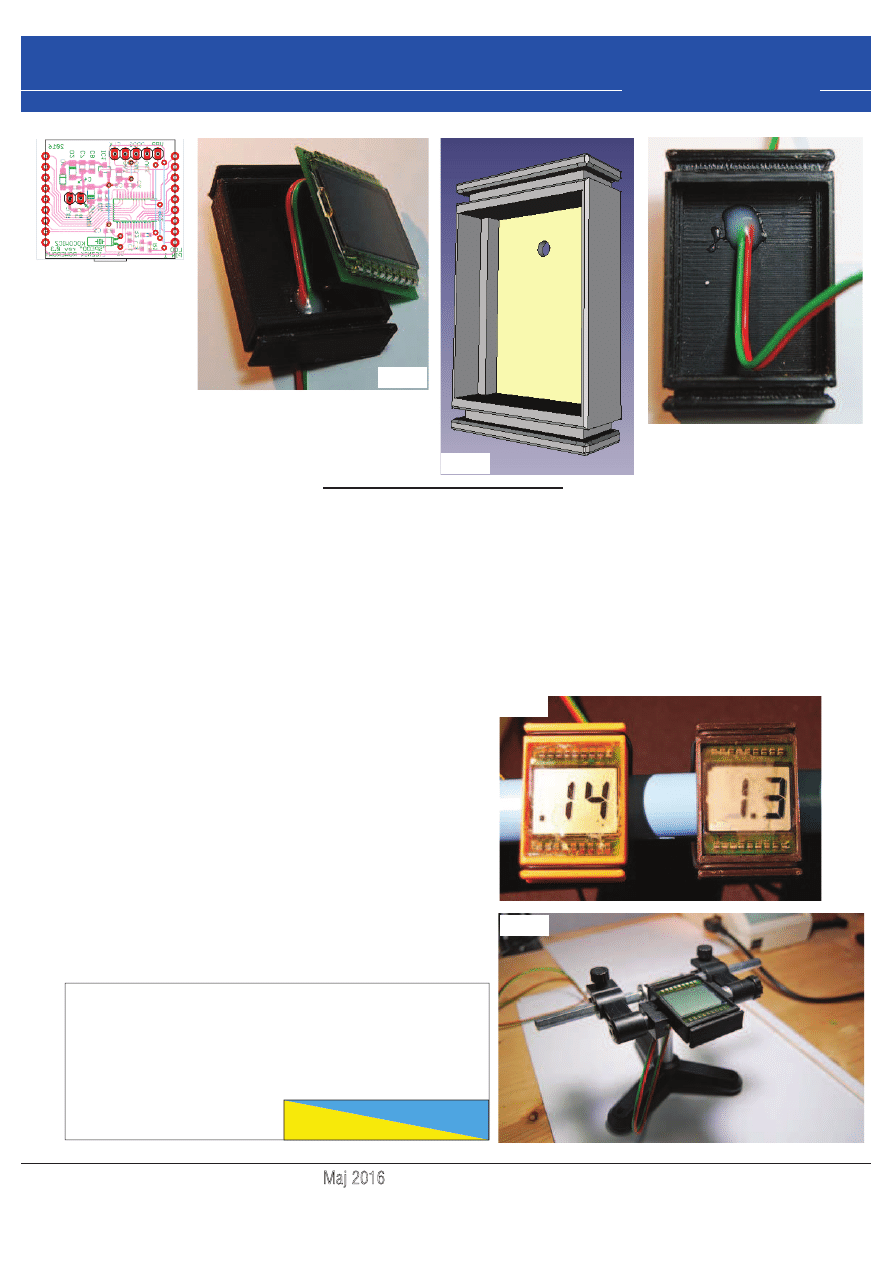
Monta
İ i uruchomienie
Monta
Ī odbywa siĊ standardowo, roz-
mieszczenie elementów pokazano na
rysunku 3. Najpierw nale
Īy zamontowaü
pi
Ċü zworek, nastĊpnie elementy SMD,
a na ko
Ĕcu wyĞwietlacz LCD. Zworki
i wy
Ğwietlacz montuje siĊ po przeciwnej
stronie PCB ni
Ī elementy SMD. Záącza
programowania i 2-pinowego z
áącza wej-
Ğciowego nie montuje siĊ, jeĪeli ukáad ma
zosta
ü umieszczony w obudowie.
Rozk
áad wyprowadzeĔ záącza pro-
gramowania PROG jest
kompatybilny z programa-
torem PICkit3 (z pomi-
ni
Ċciem zbĊdnego w tym
przypadku pinu AUX). Po
zaprogramowaniu
uk
áad
jest gotowy do pracy
i mo
Īna podáączyü go do
dynama.
Po monta
Īu i zaprogra-
mowaniu mikrokontrolera,
w celu ustawienia rozmia-
ru ko
áa, naleĪy podáączyü
uk
áad do przejĞciówki USB-
-UART (GND przej
Ğciów-
ki do pinu 2 z
áącza SUP
a TX przej
Ğciówki do pinu 1
z
áącza SUP). W stanie spo-
czynku na pinie
TX przej
Ğciówki obecne jest
napi
Ċcie 5V, którym zasilany
jest licznik. Po wykryciu podania napi
Ċcia
sta
áego, trwającego dáuĪej niĪ 5 sekund,
uk
áad przechodzi w tryb programowa-
nia, co sygnalizowane jest wy
Ğwietleniem
aktualnej warto
Ğü obwodu koáa w centy-
metrach. Wy
Ğwietlacz ma tylko 2 pozy-
cje dlatego obwód ko
áa wyĞwietlany jest
jako liczba szesnastkowa w centymetrach.
(0...255cm). Licznik rowerowy oczekuje
wtedy na jeden bajt przes
áany z prĊdkoĞ-
ci
ą 1200 bodów bez bitu parzystoĞci.
Ci
ąg dalszy na stronie 58
Rys. 3
Fot. 4
Fot. 6
Fot. 7
R1, R4 . . . . . . . . . . . . . . . . . . . . . 10k
: 0603
R2 . . . . . . . . . . . . . . . . . . . . . . . . 470
: 0603
R3 . . . . . . . . . . . . . . . . . . . . . . . . . 2k
: 0603
C1,C2 . . . . . . . . . . . . . . . . . . . . 12.5pF 0603
C3,C4,C6,C9 . . . . . . . . . . . . . . . . . 100n 0603
C5, C7, C8 . . . . . . . . . . . . . . . . . . . 10u 0805
D1 . . . . . . . . . . . . . . . . . MBR0520LT SOD123
D2 . . . . . . . . . . . . .dioda Zenera 12V Minimelf
D4 . . . . . . . . . . . . dioda Zenera 2,7V Minimelf
IC1 . . . . . . . . . . . . . . . . .MCP1703CB SOT23
IC2 . . . . . . . . . . . PIC16LF1906-I/SS SSOP28
LCD1 . . . . . . . . . . . . . . . . . . . . . . . . . .LCD2.0
PROG. . . . . . . . . . . . . . . . . . . . . . .PINHD-1X5
Q1 . . . . . . . . . . . . . . . . kwarc 32768Hz TC26H
SUP. . . . . . . . . . . . . . . . . . . . . . . .PINHD-1X2
Wykaz elementów
Komplet podzespo
ïów z pïytkÈ
jest do st
Úp ny w sie ci han dlo wej AVT
ja ko kit szkol ny AVT-3148.
Fot. 8
Rys. 5
Wyszukiwarka
Podobne podstrony:
BION CY E100 PL licznik rowerowy
Licznik rowerowy Sigma BC1200 instrukcja PL
BION CY E100 PL licznik rowerowy
instrukcja obs ugi do licznika rowerowego Sigma Sport BC 16 12 STS PL (videotesty pl)
Licznik rowerowy Sigma BC 1600
licznik rowerowy crivit
Profex Licznik Rowerowy PL Instrukcja
ag270c wodoodporny licznik rowerowy shark l1
Lampka rowerowa led(Edw) id 263 Nieznany
Rowerowy licznik kilometrów
W 5g PLC LICZNIKI
Chełmża przewodnik rowerowy
Leksykon pojęć rowerowych
edw 2003 01 s18
Miasta rowerowe miastami przyszłości
edw 2003 08 s10
więcej podobnych podstron