
Kamil Chmielewski L01 II OFF
Sprawozdanie nr 2
Temat: Echosonda Wielowiązkowa.
I.
Budowa i zasada działania echosondy wielowiązkowej:
Zasada działania wielowiązki oparta jest na nadawaniu sygnałów, w kształcie wachlarza, do dna morskiego,
gdzie sygnał akustyczny zostaje odbity. Kilka wiązek jest elektronicznie uformowanych (za pomocą technik
przetwarzania sygnału) aby były znane ich kąty. Czas pomiędzy nadaniem sygnału i odbiorem odbitego od
dna sygnału jest obliczany przy pomocy specjalnych algorytmów. Dzięki zastosowaniu śledzenia promieni
możliwe jest określenie głębokości oraz poprzecznej odległości do centrum obszaru uwidocznionego na
ekranie echosondy dna morskiego.
Wielowiązka składa się z wielu pojedynczych wiązek, które pozwalają na przeszukanie, pomierzenie
znacznie szerszego pasa dna morskiego. Jednakże ma to swoje niedogodności związane z wieloma
czynnikami wpływającymi na pomiar jak i otrzymywany obraz.
Głównymi czynnikami branymi pod uwagę przy wykonywaniu pomiarów echosondą wielowiązkową to
sześć stopni swobody statku, z którego są dokonywane pomiary.
Echosonda wielowiązkowa składa się z:
o Czujnika ruchu – określania i uwzględniania ruchów głowicy echosondy.
o
Profiler prędkości dźwięku – do pomiaru prędkości dźwięku przez słup wody.
o
Czujnik prędkości dźwięku – do pomiaru prędkości dźwięku na wyjściu przetwornika.
o System pozycjonowania – do określania miejsca wykonania pomiaru DGPS, RTK GPS.
Zintegrowany z czujnikiem ruchu.
o Czujnik kierunku ruchu – zintegrowany z czujnikiem ruchu, najczęściej składający się z dwóch
odbiorników GPS określających kurs.
II.
Interpretacja echogramu:
a. Średnia głębokość
-
17.58 [m]
b. Głębokość min.
-
14.87 [m]
c. Głębokość max.
-
19.98 [m]
d. Szerokość wiązki :
- lewa burta
-
40.00 [m]
- prawa burta
-
40.00 [m]
e. Coverage
-
61.77 [m]
Footprint
- 2994,701 [m
2
]
f. Na echogramie w zenicie echosondy znajduje się puste miejsce co może świadczyć o
znajdującym się tam obiekcie. Dodatkowo o prawdopodobnym obiekcie świadczy, że głębokości
równomiernie po obu stronach maleją do zenitu echosondy.
III.
Procedura kalibracji echosondy wielowiązkowej:
Kalibracja urządzenia jest obowiązkową procedurą, polegającą na określeniu kątów przesunięcia (roll, pitch,
yaw) dla obu przetworników, czujnika ruchu oraz opóźnienia z systemu pozycjonowania.
Kalibracja musi być przeprowadzona po zamocowaniu urządzenia, po dłuższym czasie nieużytkowania oraz
zmianach w instalacji urządzenia.
Przed kalibracją niezbędne jest sprawdzenie parametrów instalacji i określenie prędkości dźwięku aby
uaktualnić obliczenia ze względu na refrakcję.
Opóźnienie czasowe (pozycjonowania) – jest to przesunięcie czasowe pomiędzy pomiarami
głębokości i pozycjonowania. Procedura określenia jego polega na określeniu różnicy czasu
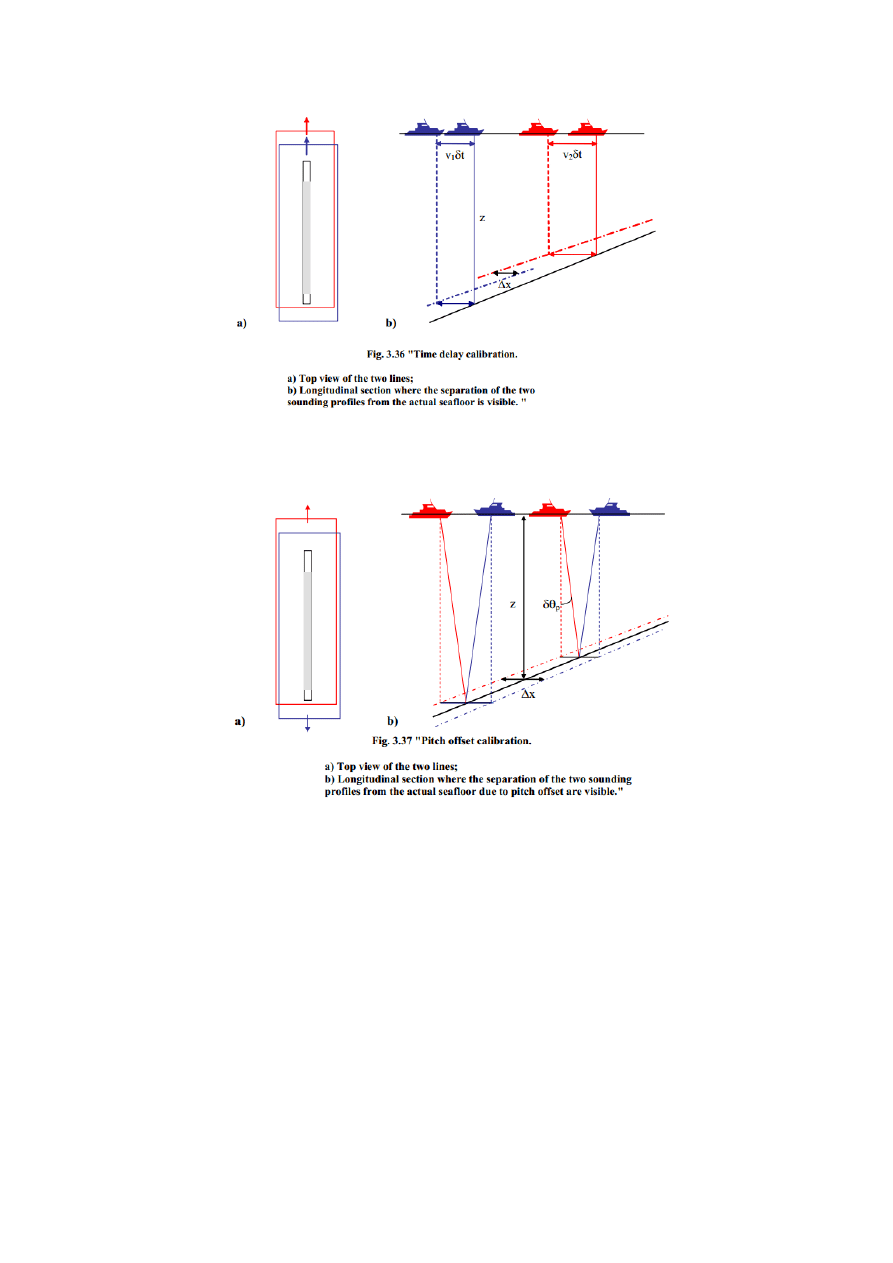
pomiędzy dwoma przejazdami nad profilem z różnymi prędkościami nad charakterystycznymi
cechami dna morskiego.
Poprawka na przegłębienie (Pitch offset) – jest to kąt przesunięcia od inercyjnej jednostki
pomiarowej i pionowym ustawieniem przetwornika w płaszczyźnie wzdłużnej statku. Procedura
składa się z przeprowadzenia dwóch przejazdów nad charakterystyczną cechą dna (pochyłość).
Poprawka na wskazanie kursu (Azimuthal offset) – kąt przesunięcia między czujnikiem kierunku
(kursu) i ustawieniem przetwornika w osi wzdłużnej statku. Procedura polega na określeniu tego
kąta poprzez dwa przejazdy z tą samą prędkością nad obszarem z dobrze określoną batymetrią.
Przylegające profile powinny pokrywać się na zewnętrznych profilach wiązki (nie więcej niż 20%).
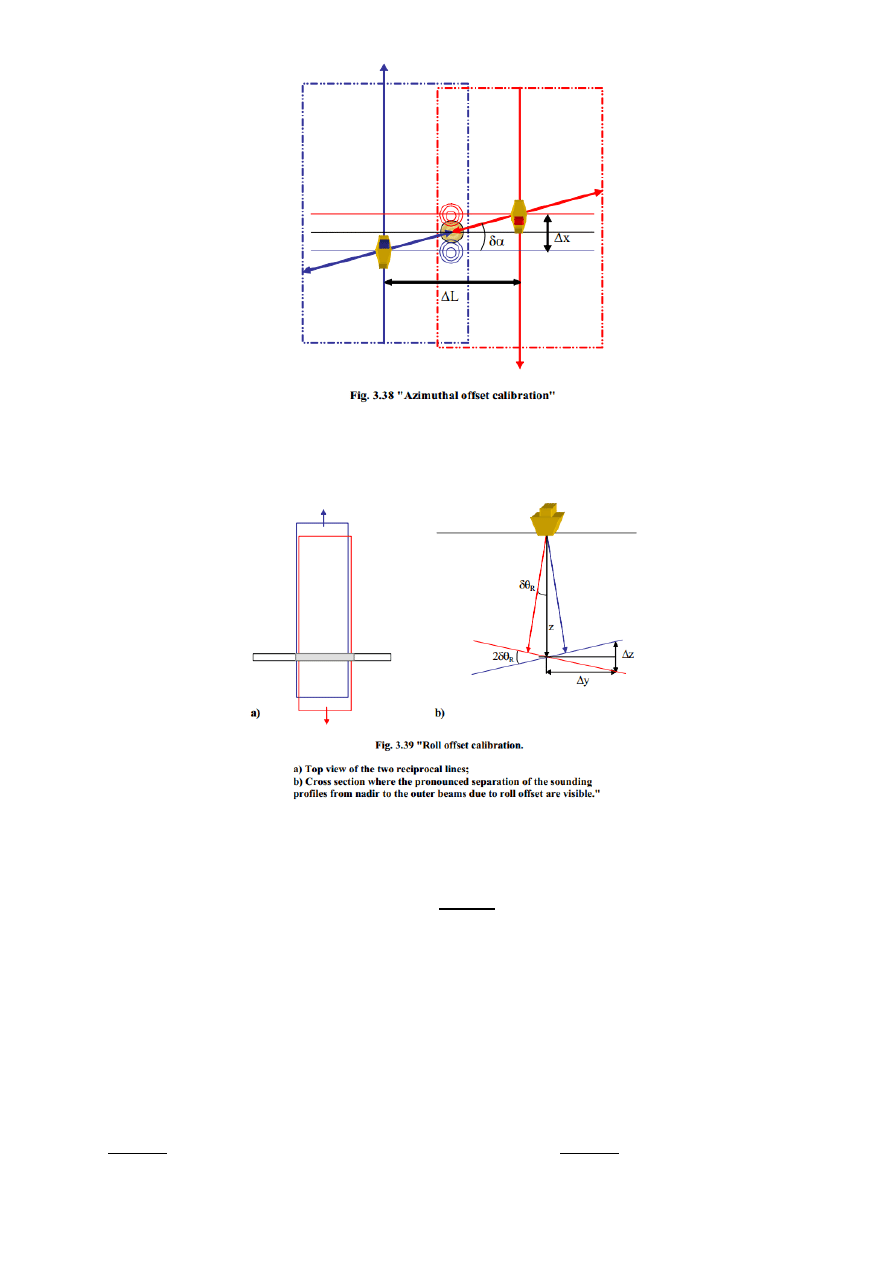
Poprawka na przechyły boczne (Roll offset) – kąt pomiędzy inercyjną jednostką pomiarową, a
ustawieniem przetwornika do miejscowej pionowej w poprzek statku. Polega na określeniu
przesunięcia składającego się z dwóch przejazdów po badanej linii z ta samą prędkością nad
regularnym i płaskim dnem.
IV.
Parametry kalibracji:
a. Opóźnienie czasowe:
δt – opóźnienie czasowe [s]
Δx – błąd utrzymania jednostki na profilu [m]
V
1
, V
2
– prędkości jednostki [m/s]
Prawy przetwornik
Lewy Przetwornik
b. Pitch – poprawka na przegłębienie:
Δθ
P
– poprawka na przegłębienie[ ]
Δx
P
– odległość między profilami [m]
z – głębokość [m]
Prawy przetwornik
Lewy Przetwornik
c. Roll – poprawka na przechyły poprzeczne:
Δθ
R
– poprawka na roll [ ]
Δz – różnica w pomiarze głębokości [m]
Δy – odległość między profilami [m]
Prawy przetwornik
Lewy Przetwornik
d. Yaw – poprawka na wskazanie kursu
δα – poprawka na odchylenie kursu [ ]
Δx
y
– wartość odchylenia od kursu jednostki [m]
ΔL – odległość między profilami [m]
Prawy przetwornik
Lewy Przetwornik
Data:
19/03/2012
Godzina:
1430
Poligon
: :
PRAWY
LEWY
LAVENCY
[s]
[s]
ROLL
[˚]
[˚]
PITCH
[˚]
[˚]
YAW
[˚]
[˚]
Tabela Kalibracyjna
V.
Rodzaje błędów:
a. Związany z prędkością dźwięku w wodzie:
Błąd ten zależny jest od dokładności ustalenia prędkości dźwięku, zmiany prędkości dźwięku w czasie,
przestrzennego zróżnicowanie prędkości dźwięku. Błędy pomiaru głębokości są proporcjonalne do
średniego błędu prędkości dźwięku w wodzie lub zmiany głębokości.
Błąd związany ze zmianą prędkości dźwięku w wodzie na profilu:
z – głębokość [m]
c
0
- prędkość dźwięku w wodzie [m/s]
– szerokość wiązki [ ]
dg – średni błąd gradientu prędkości dźwięku w wodzie [m]
dc
0
– średni błąd pomiaru prędkości dźwięku w widzie [m/s]
Błąd głębokości spowodowany propagacją kierunkowa wiązki:
z – głębokość [m]
c
0
- prędkość dźwięku w wodzie [m/s]
– szerokość wiązki [ ]
dc
0
– średni błąd pomiaru prędkości dźwięku w widzie [m/s]
b. Ze względu na ruch statku na fali:
Błąd ten wynika z tego, że podczas ruchu statku na fali wiązka sondująca pod wpływem tych ruchów pada
pod różnym kątem i w różnej odległości przy każdym z ruchów.
ROLL
z – głębokość [m]
θ
P
– średni błąd głębokości spowodowany kołysaniem wzdłużnym [ ]
θ
R
– średni błąd głębokości spowodowany kołysaniem bocznym [ ]
– szerokość wiązki [ ]
dθ
R
– średni błąd pomiaru kołysania bocznego [ ]
PITCH
z – głębokość [m]
θ
P
– średni błąd głębokości spowodowany kołysaniem wzdłużnym [ ]
θ
R
– średni błąd głębokości spowodowany kołysaniem bocznym [ ]
– szerokość wiązki [ ]
dθ
P
– średni błąd pomiaru kołysania wzdłużnego [ ]
c. Zanurzenie przetwornika:
dz
draught
– średni błąd zanurzenia jednostki [m]
dz
settlement
– średni błąd głębokości spowodowany przemieszczaniem się jednostki [m]
dz
squat
– średni błąd dynamicznego zanurzenia jednostki [m]
d. Ze względu na redukcję głębokości:
Na błąd ten wpływają zachowania jednostki na fali, oraz redukcję głębokości spowodowaną pływem.
dz
tide m
– średni błąd redukcji głębokości do pionowego układu odniesienia [m]
dz
co tide
– różnica w zaobserwowanej w trakcie pomiarów wartości pływu, a wartością odczytaną z
pływomierza [m]
e. Błąd całkowity:
Na poziomie zaufania 68%:
Na poziomie zaufania 95%:
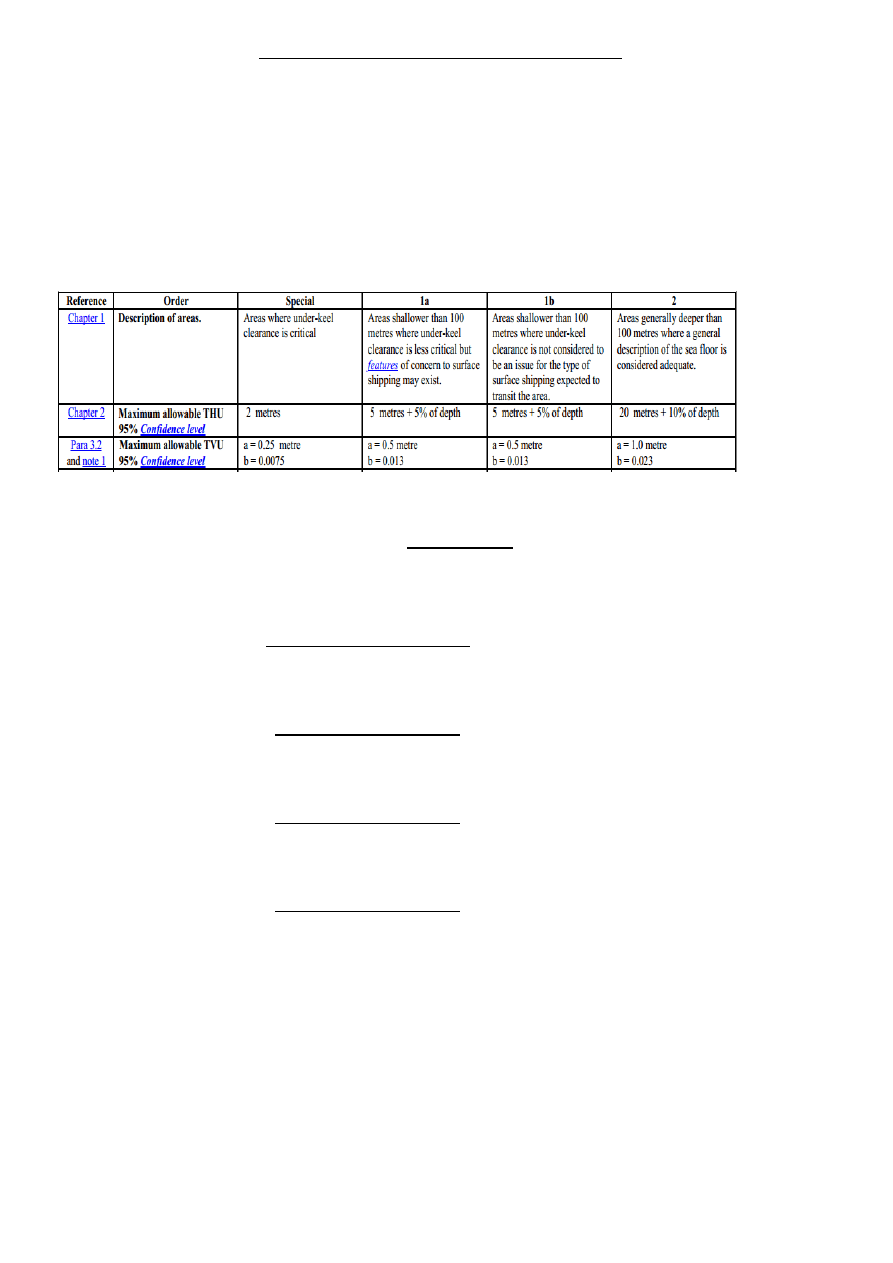
Porównanie błędu całkowitego z minimalnymi dopuszczalnymi dokładnościami ustalonymi
przez standard S-44 dla klas: specjalnej, 1a, 1b i 2:
Aby określić minimalną dopuszczalną dokładność urządzenia należy dla każdej z klas obliczyć ją ze wzoru:
Klasa specjalna:
Klasa 1a:
Klasa 1b:
Klasa 2:
W związku z powyższym błąd całkowity spełnia minimalne dopuszczalnych dokładności dla klas 1a, 1b i 2
dla pomiaru głębokości 17.58 metra. Natomiast dla klasy specjalnej nie spelnia minimalnej dopuszczalnej
dokładności.
VI.
Rozporządzenie Ministra Gospodarki Morskiej z dnia 23 października 2006 r.
§ 88. 1. Plan batymetryczny akwenu jest zapisem wykonanych pomiarów hydrograficznych, opracowanym
zgodnie z obowiązującymi przepisami służby hydrograficznej, służącym w szczególności do ustalenia:
1) głębokości nawigacyjnej (H
n
);

2) głębokości nawigacyjnej aktualnej (H
na
);
3) przegłębień dna;
4) spłyceń dna.
2. Dokładność pomiarów batymetrycznych wykorzystywanych do opracowania planu batymetrycznego nie
może być mniejsza niż określona w obowiązujących przepisach, o których mowa w ust. 1.
§ 89. 1. Plan batymetryczny akwenu jest wykorzystywany przez właściciela, zarządcę lub użytkownika
budowli morskiej oraz przez właściwe organy przy określaniu stateczności tych budowli.
2. Wyróżnia się następujące rodzaje planów batymetrycznych akwenu:
1) okresowe;
2) kontrolne;
3) awaryjne.
§ 90. 1. Okresowe plany batymetryczne akwenu sporządza się:
1) co 2 lata - przy nieregularnym użytkowaniu akwenów i budowli morskich oraz dla stoczniowych
konstrukcji hydrotechnicznych;
2) co 1 rok - przy regularnym użytkowaniu akwenów i budowli morskich, w tym budowli przeznaczonych
do przeładunku towarów i ładunków drobnicowych, masowych i kontenerów;
3) w okresie krótszym niż rok:
a) przy intensywnym użytkowaniu akwenów i budowli morskich, przy których odbywa się przeładunek
ładunków masowych luzem oraz gdy ładunek ten wpada do akwenu i mogą wystąpić duże spłycenia dna,
b) przy budowlach morskich wchodzących w skład terminali pasażerskich, promowych, paliwowych,
gazowych oraz paliwowo-gazowych,
c) w przypadku konieczności użytkowania budowli morskiej będącej w stanie przedawaryjnym,
d) dla stanowisk stacji prób statków na uwięzi.
2. Ustalenie okresu krótszego niż rok, o którym mowa w ust. 1 pkt 3, należy określić w dokumentach
kontroli okresowych.
§ 91. Kontrolne lub awaryjne plany batymetryczne akwenu należy wykonywać w przypadku:
1) wykonania robót czerpalnych;
2) wykonania robót zasypowych, w celu likwidacji przegłębień dna;
3) konieczności uzyskania decyzji o zmianie sposobu użytkowania budowli morskiej, w szczególności przed
obciążeniem budowli morskiej dźwignicą wywołującą większe lub bardziej niekorzystne obciążenia;
4) stwierdzenia użycia śruby przez statek zacumowany do budowli morskiej, nieprzystosowanej do takiego
użytkowania;
5) po każdym sztormie, który wywołał określone w dokumentacji maksymalne falowanie na akwenie przy
morskiej budowli hydrotechnicznej - w szczególności dla falochronów;
6) każdorazowo po zaistniałej awarii budowli morskiej.
§ 92. Dla zapewnienia bezpieczeństwa żeglugi jednostek pływających właściwe są wyłącznie plany
batymetryczne akwenu wykonane lub sprawdzone, na podstawie przepisów odrębnych, przez właściwe
urzędy morskie albo Biuro Hydrograficzne Marynarki Wojennej.
Wyszukiwarka
Podobne podstrony:
Kamil Chmielewski L01 II OFF
Sprawozdanie nr 4 (4) - Termometry, sem II, Podstawy Technologii Okrętów - Wykład.Laboratorium, Labo
Sprawozdanie nr 4 (4) - Termomatry, sem II, Podstawy Technologii Okrętów - Wykład.Laboratorium, Labo
Sprawozdanie nr 3, Studia, I semestr II rok, Biochemia, Różne
Sprawozdanie metrologia cw 9, ZiIP, II Rok ZIP, Metrologia, metrologia, Sprawozdania
Kamil Chmielewski II OFF Ćw Sprawozdanie nr 1
Kamil Chmielewski II OFF Ćw Sprawozdanie nr 4
Kamil Chmielewski II OFF Ćw Sprawozdanie nr3
sprawozdanie nr 19, Szkoła, Semestr 2, Fizyka II, Fizyka - laborki, Ćw. 19
Sprawozdanie Nr. 8 (ilościowa), AGH WIMiC, Rok II, Chemia Nieograniczna ROK II, Laboratoria
SPRAWOZDANIE NR 1, ZiIP, II Rok ZIP, Metrologia, Sprawozdanie nr 1
Sprawozdanie nr 3 (3), sem II, Podstawy Technologii Okrętów - Wykład.Laboratorium, Laboratorium nr 3
Sprawozdanie Nr. 9 (ilościowa), AGH WIMiC, Rok II, Chemia Nieograniczna ROK II, Laboratoria
sprawozdanie nr 2 (2), II rok, chemia fizyczna
Grupa II 41C, OGRODNICTWO inż, Semestr 7, Przetwórstwo, sprawozdanie nr 3
Sprawozdanie nr 3 - zaprawa, Studia Budownictwo polsl, II semestr, Materiały budowlane, Sprawko 7
Sprawozdanie nr.1, Politechnika Lubelska, Studia, ELEKTROTECHNIKA LABORATORIUM, Laboratoria z elektr
więcej podobnych podstron