W Y K Ł A D 4
ZJAWISKA REZONANSOWE W OBWODACH ELEKTRYCZNYCH
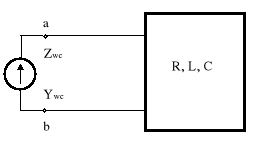
Pulsacje obwodu, dla których część urojona admitancji wejściowej Im{Ywe} lub część urojona impedancji wejściowej Im{Zwe} jest równa zeru, nazywamy pulsacjami drgań nietłumionych (swobodnych) układu R, L, C.
Rys.11.1. Obwód R, L, C
Im {Zwe} = 0, lub Im {Ywe} = 0.
Zjawisko występujące w obwodzie R, L, C, gdy pulsacja zasilania jest równa pulsacji drgań nietłumionych (swobodnych) określonych przez warunki (11.1) i (11.2), nosi nazwę rezonansu, a pulsacja ω pulsacji rezonansowej. Mówimy wówczas o tzw. rezonansie fazowym. Oprócz rezonansu fazowego istnieje również rezonans amplitudowy jako:
stan ekstremum prądu przy wymuszeniu napięciowym, gdzie częstotliwość rezonansu amplitudowego wyznacza się z warunku

,stan ekstremum napięcia przy wymuszeniu prądowym, gdzie częstotliwość rezonansu amplitudowego wyznacza się z warunku

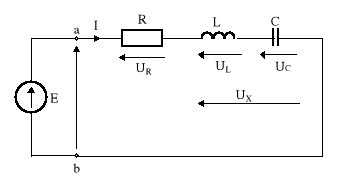
11.1. Obwód szeregowy R, L, C (rezonans napięć)
e (t) = | Em | sinωt = ![]()
| E | sinωt.
Rys.11.2. Szeregowy obwód R, L, C
![]()
, (11.3)
, (11.3a)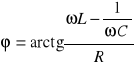
. (11.3b)
![]()
(11.4) 
. (11.5)
UR = RI, UL = jXLI, UC = -jXCI. (11.6)
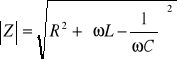
Zgodnie z definicją rezonans napięć wystąpi dla pulsacji ω, dla której
Im{Zwe} = 0, czyli ![]()
= 0 lub XL = XC, (11.7)
co oznacz równość reaktancji indukcyjnej i reaktancji pojemnościowej.
Warunek ten może być zrealizowany na dwa sposoby:
dla ω = const. poprzez odpowiedni dobór indukcyjności L w stosunku do pojemności C , tzn.
![]()
(11.8) lub odwrotnie, tzn. ![]()
(11.9)
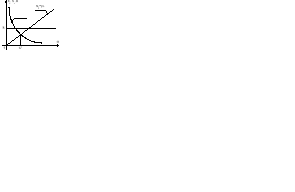
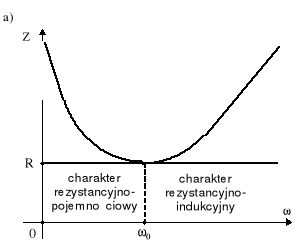
dla ω = variab. oraz L = const. i C = const. poprzez odpowiedni dobór pulsacji ω ( częstotliwości f ) , co wyjaśnia rys.11.3 przedstawiając zależność składników impedancji od pulsacji ω .
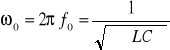
, (11.10)
gdzie: f0 - częstotliwość rezonansowa równa częstotliwości zasilania, wyrażona w Hz.
Rys.11.3. Charakterystyki częstotliwościowe składników
impedancji obwodu szeregowego R, L, C
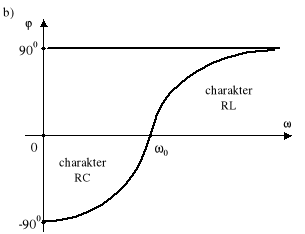
Rys.11.4. Charakterystyki częstotliwościowe obwodu szeregowego R, L, C: a) modułu impedancji; b) argumentu impedancji
I0 =![]()
, | I0 |= | Imax | , (11.11)
![]()
(11.12)
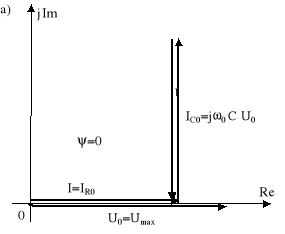
UR0 = R I0 = E , UL0 = jXL0 I0 = -UC0 , UC0 = -jXC0 I0 = -UL0 , UX0 = UL0 + UC0 = 0 .
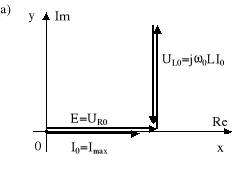
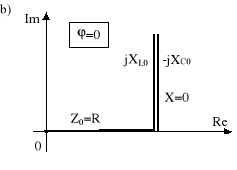
Rys.11.5. Rezonans szeregowy R, L, C ; a) wykres wektorowy prądu i napięć, b) wykres impedancji
11.2. Obwód równoległy R, L, C (rezonans prądów)
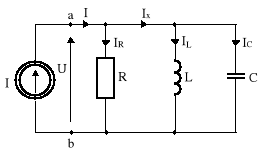
i(t) = | Im | sinωt,
Rys.11.10. Obwód równoległy R, L, C
![]()
,
. (11.50b)
. (11.51) 
. (11.51a)
![]()
(11.52)
(11.52a)
Gdy Im{Ywe} = 0, to
![]()
= 0. (11.53) tzn. BL = BC , (11.53a)
dla ω = const. poprzez odpowiedni dobór indukcyjności L w stosunku do pojemności C otrzymując warunek (11.8) lub warunek (11.9)
dla ω = variab. oraz L = const. i C = const. poprzez odpowiedni dobór pulsacji ω ( częstotliwości f )
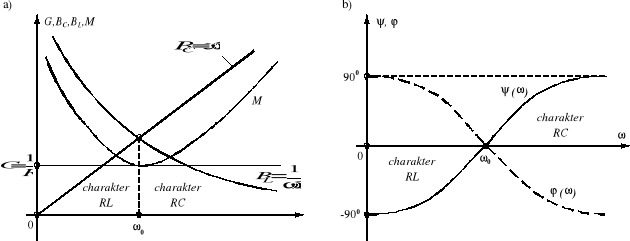
Rys.11.11. Układ równoległy R, L, C a) charakterystyki częstotliwościowe składników admitancji obwodu równoległego R, L, C, b) argument admitancji
|Y| = G. 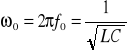
. (11.54)
U0 = Umax = R I , (11.55) ![]()
, (11.56)![]()
. (11.56a)
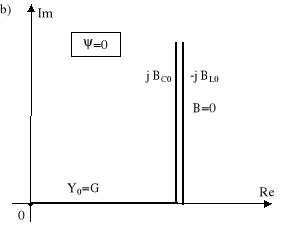
Rys.11.12. Rezonans równoległy R, L, C; a) wykres wektorowy napięcia i prądów b) wykres admitancji
MOCE DLA PRZEBIEGÓW SINUSOIDALNYCH
10.1. Moce dla przebiegów sinusoidalnych i ich zachowawczość
u(t) = ![]()
|U| sin(ωt + α), (10.1)
i(t) = ![]()
|I| sin(ωt +β), (10.2)
Rys.10.1. Dwójnik liniowy
moc chwilową p(t) = u(t) i(t) = |U | |I | cosϕ - |U | |I | cos(2ωt + 2α - ϕ), (10.3)
moc czynną P =

= |U| |I| cosϕ, (10.4)
gdzie: ϕ = α − β ,
moc bierną Q = |U| |I| sinϕ, (10.5)
moc pozorną |S| = |U| |I| =

, (10.6)
moc symboliczną S = P + jQ = U I* (10.7)
gdzie: I* - wartość skuteczna zespolona sprzężona prądu.
współczynnik mocy źródła ![]()
≤ 1 (10.8)
10.2. Znaczenie techniczne współczynnika mocy i jego poprawa
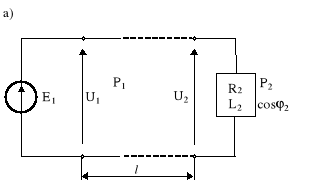
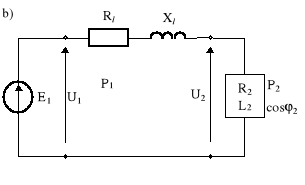
Rys.10.3. Układ: a) źródło - linia transmisyjna - odbiornik; b) schemat zastępczy
Rl = 2Rp = 2![]()
, (10.20) Ll = ![]()
, (10.21)
gdzie: ρ - rezystywność materiału (przewodów), s - przekrój przewodu, l - długość linii,
d - odstęp między przewodami, r- promień przekroju przewodu.
P2 = |U2| |I| cosϕ2, (10.22) a stąd ![]()
. (10.23)
Straty mocy czynnej ΔPl = Rl | I |2 = 
. (10.24)
Straty mocy biernej wzdłuż linii ΔQl = Xl | I |2 = Xl 
. (10.25)
P1 = P2 + ΔPl = P2 + 
, (10.26)
Q1 = Q2+ΔQl = Q2+ 
, (10.27)
|S1| = |E1| | I | =![]()
. (10.28)
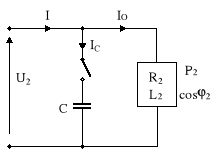
Nadrzędnym celem kompensacji mocy biernej jest zmniejszenie wartości skutecznej prądu źródła, którego wzrost ponad wartość potrzebną dla zapewnienia mocy czynnej odbiornika P2 spowodowany jest właśnie przepływem mocy biernej.
Rys.10.5. Układ: źródło-odbiornik-kompensator
. (10.36)
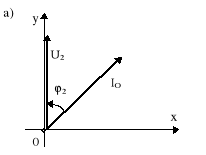
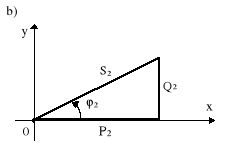
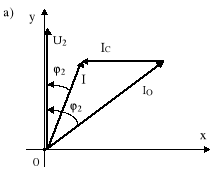
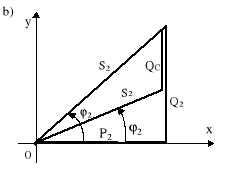
Rys.10.6. Podstawowe wielkości dla układu z rys.10.5: a) wykres wektorowy przy odłączonym kompensatorze; b) trójkąt mocy
I = I0 + IC = I0 + j ωC U2 . (10.37)
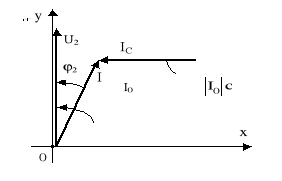
Rys.10.7. Wykres wektorowy dla układu z rys.10.5 przy włączonym kompensatorze (kondensatorze)
Moc czynna odbiornika po włączeniu kondensatora się nie zmieni, gdyż
|I0| cosϕ2 = |I| cosϕ2′, (10.38) P2 = |U2| |IO| cosϕ2 = |U2| |I| cosϕ2 . (10.39)
Zagadnienie poprawy współczynnika mocy możemy rozważać w dwojaki sposób:
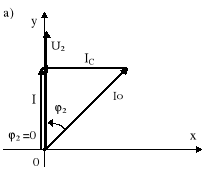
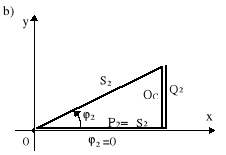
1. Dobrać tak pojemność C, aby kąt ϕ2′= 0, tzn. aby prąd źródła I był w fazie z napięciem U2 i wówczas mówimy o kompensacji całkowitej (rys.10.8). Dla tak postawionego zagadnienia, po kompensacji zachodzi |S2′| = P2 ( rys.10.8b). Z rys.10.8b wynika, że
Q2 = QC = P2 tgϕ2 = ωC0 |U2|2, (10.40)
a stąd

. (10.40a)
Rys.10.8. Całkowita kompensacja mocy biernej: a) wykres wektorowy; b) trójkąt mocy
2. Dobrać tak pojemność C, aby otrzymać żądany współczynnik mocy cosϕ2′ > cosϕ2 (ϕ2′ < ϕ2), mówimy wówczas o częściowej kompensacji. Ten rodzaj kompensacji jest praktycznie stosowany, gdyż przy zbliżaniu się pojemności C do pojemności C0 określonej wzorem (10.40a) wpływ jej na wartość prądu I jest coraz mniejszy i kompensacja całkowita może okazać się nieopłacalna z punktu widzenia ekonomicznego.
Przed doborem kondensatora o pojemności C, tak aby otrzymać żądany współczynnik mocy cosϕ2 rozważmy wpływ pojemności na zmniejszanie się wartości skutecznej prądu źródła. Wartość skuteczna prądu źródła |I| zmienia się od wartości |I0| do wartości
| I | = |I0 + IC| =![]()
, (10.41)
gdzie:
|IC| = ωC |U2| (10.41a) 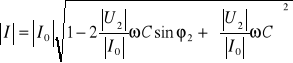
. (10.42)
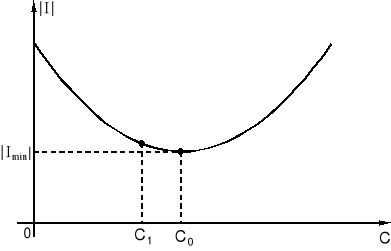
Rys.10.9. Zależność prądu źródła od pojemności kompensującej
Z rys.10.9 wynika, że w otoczeniu pojemności C0 następuje niewielka zmiana wartości prądu | I |, dlatego też proponuje się niepełną kompensację. Dla tego rodzaju kompensacji wykres wektorowy prądów oraz trójkąt mocy przedstawiono na rys.10.10.
Rys.10.10. Częściowa kompensacja mocy biernej: a) wykres wektorowy; b) trójkąty mocy przed i po kompensacji
Q2 - QC = Q = P2 tgϕ2′, (10.43) Q2 = P2 tgϕ2, QC = ωC |U2|2,
stąd szukana pojemność kompensująca wyraża się wzorem
. (10.44)
1
7
Wyszukiwarka
Podobne podstrony:
58 MT 10 Przystawka UKF
03 Czy Mt 10
58 MT 10 Rolkaseta
58 MT 10 Podstawka lutownicy
63 MT 10 Szafka biurko
61 MT 10 Prasa srubowa
MT 10
64 MT 10 Półka do szczotek
58 MT 10 Wodna waga
56 MT 10 Film rysunkowy
MT 10 2004 Nobel z matematyki
58 MT 10 Pantograf
59 MT 10 Warsztatowa lamiglowka
58 MT 10 Przystawka UKF
03 Czy Mt 10
58 MT 10 Rolkaseta
58 MT 10 Podstawka lutownicy
63 MT 10 Szafka biurko
58 MT 10 Gitara elektryczna
więcej podobnych podstron