
1.
Wielkości w ruchu obrotowym
2. Moment pędu i moment siły
3.
Zasada zachowania momentu pędu
4. Ruch obrotowy bryły sztywnej względem ustalonej osi
-II zasada dynamiki dla ruchu obrotowego
-moment bezwładności
-energia kinetyczna ruchu obrotowego
5. Precesja
ZASADA ZACHOWANIA
MOMENTU PĘDU: PODSTAWY
DYNAMIKI BRYŁY SZTYWNEJ
WSTĘP
Dotychczas opisywaliśmy ruch (kinematykę) i przyczyny ruchu
(dynamikę) tylko dla punktu materialnego
Ale rzeczywiste obiekty są znacznie bardziej skomplikowane:
składają się z wielu punktów materialnych, czasem zupełnie ze
sobą nie powiązanych.
Jeśli wzajemne położenie punktów materialnych w ciele jest stałe, to
ciało takie nazywa się bryłą sztywną , a jego ruch jest szczególnie
prosty: da się opisać jako złożenie ruchu postępowego i ruchu
obrotowego.
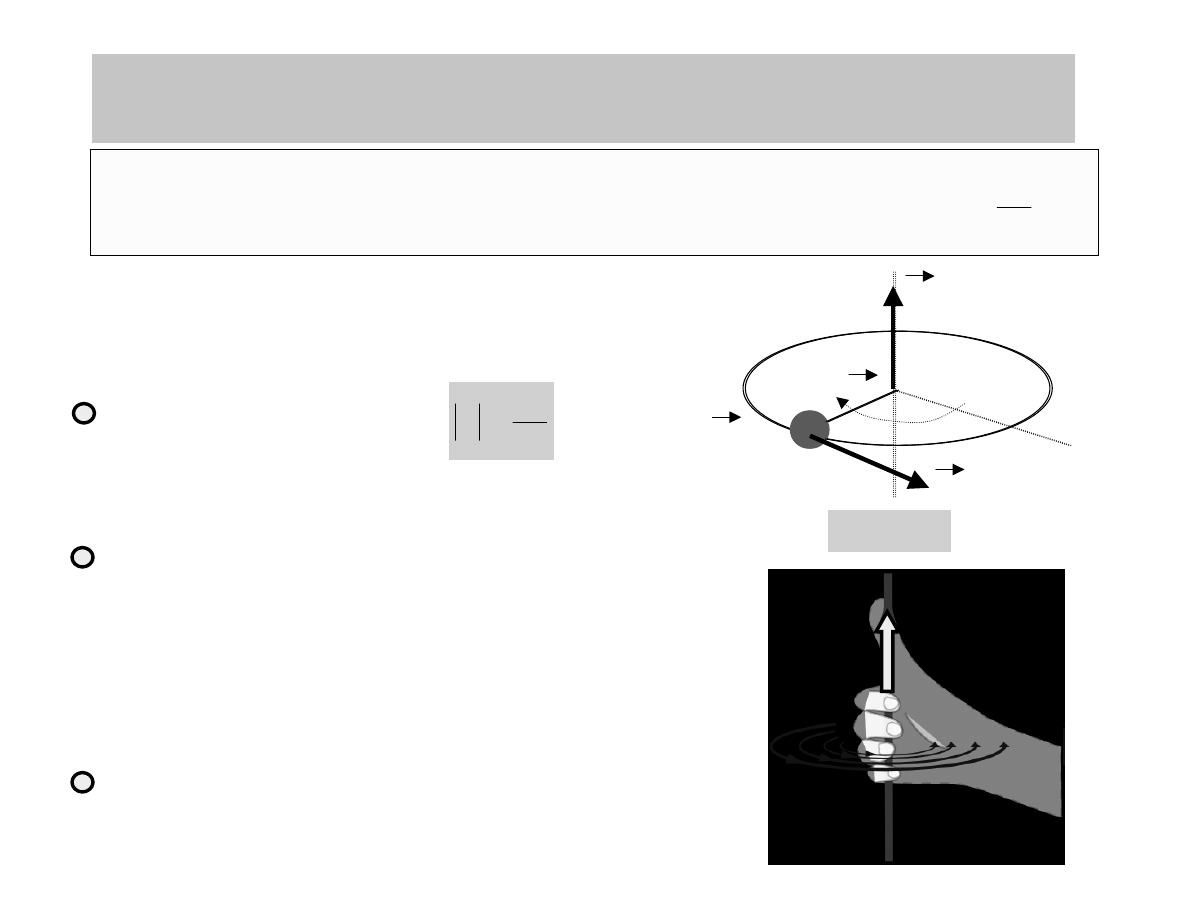
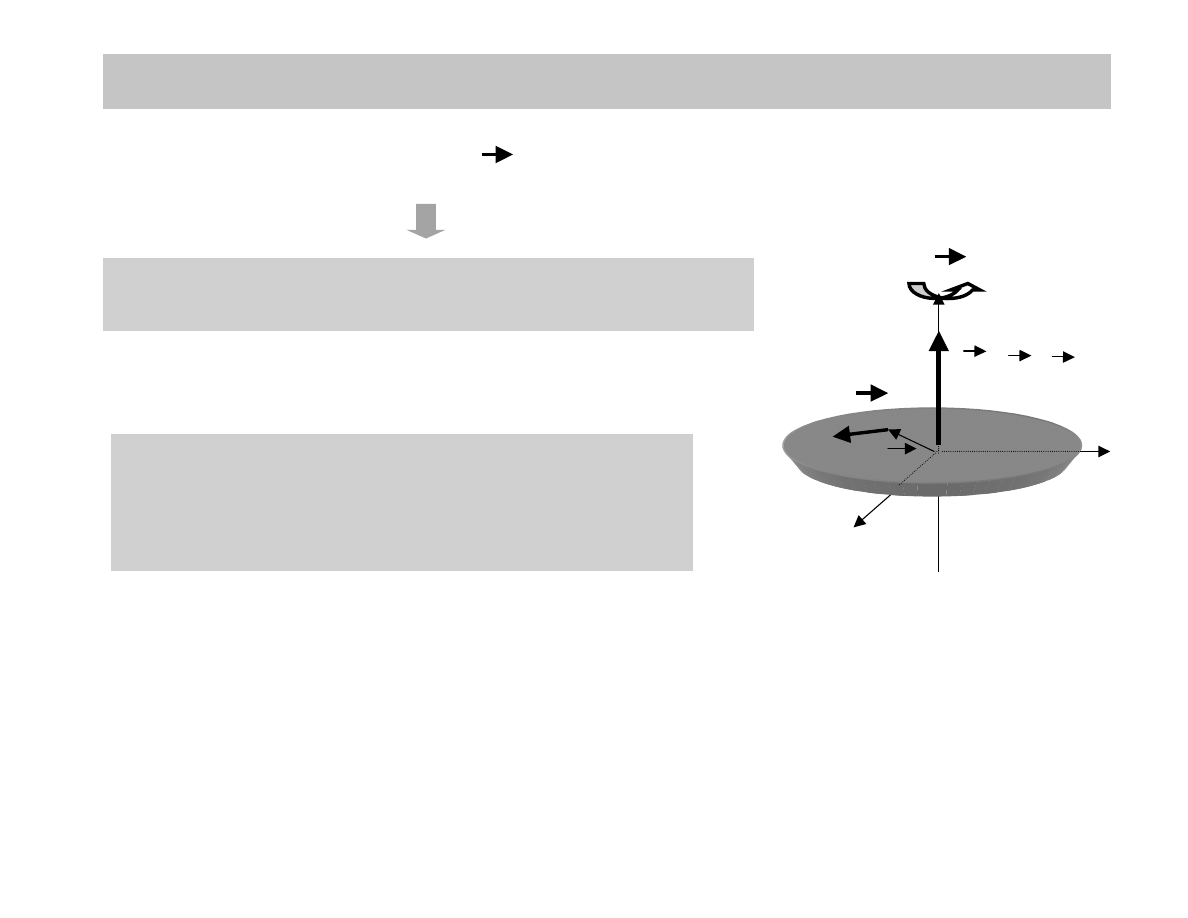
WIELKOŚCI W RUCHU OBROTOWYM: PRĘDKOŚĆ
KĄTOWA
Kierunek wektora prędkości
kątowej określony jest regułą
prawej dłoni
Ruch ciała obracającego się względem stałej osi można opisać
szybkością zmian kąta θ zakreślonego przez wektor wodzący
dowolnego punktu
dt
dθ
=
ω
r
θ
V
dt
dθ
=
ω
r
Prędkość kątowa jest
wektorem
r
θ
Kierunek wektora
prędkości kątowej zależy
od kierunku obrotu
r
V
r
v
r
×
ω
=
V
ω
ω
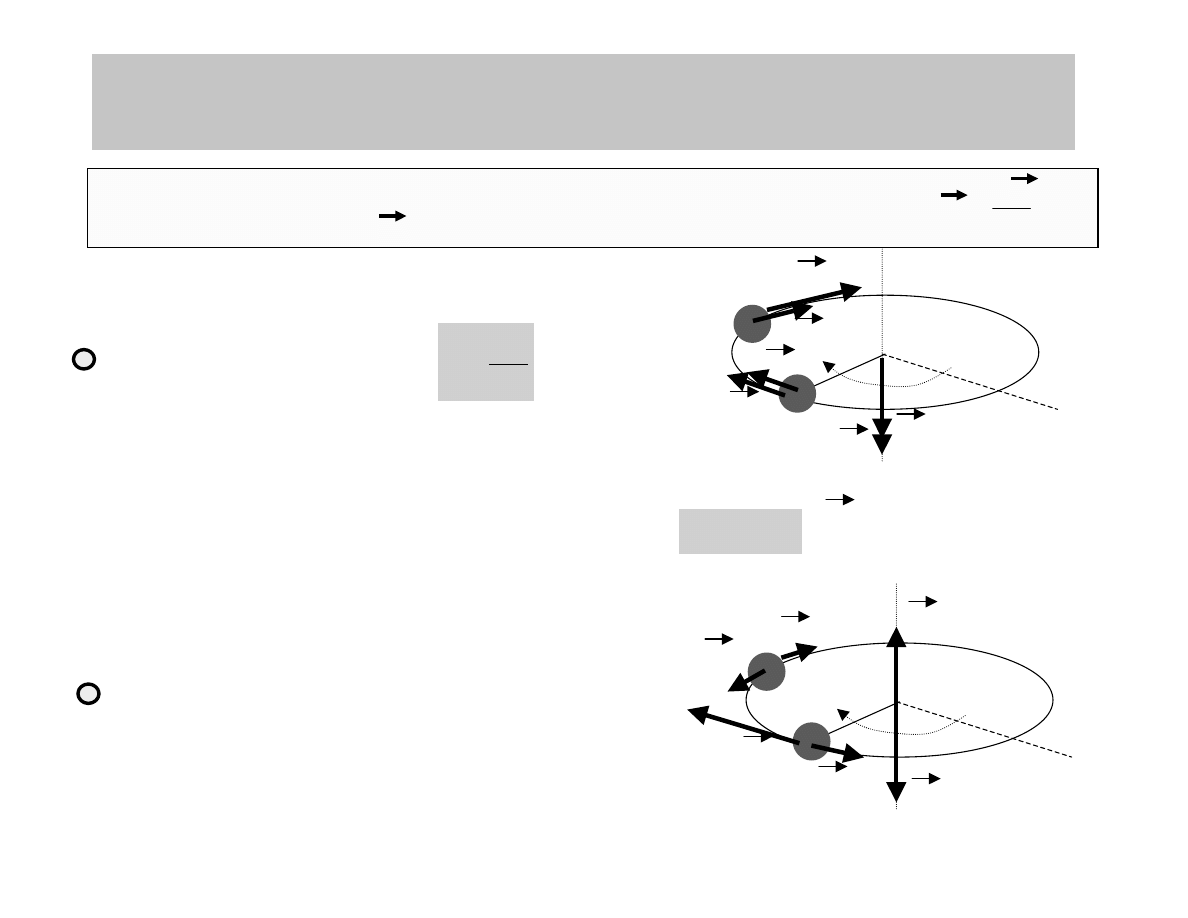
WIELKOŚCI W RUCHU OBROTOWYM:
PRZYŚPIESZENIE KĄTOWE
ω
ω
ω
ω
θ
V
ε
ε
ε
ε
dt
dω
=
ε
r
r
Przyśpieszenie kątowe
jest wektorem
Przyśpieszenie ciała w ruchu obrotowym można opisać szybkością
zmian prędkości kątowej ω
dt
dω
=
ε
V’
a
s
a’
s
Kierunek wektora
przyśpieszenia kątowego
zależy od kierunku zmian ω
ω
ω
ω
r
a
s
r
r
r
×
ε
=
a
s
- przyśpieszenie
styczne do toru
θ
V
ε
ε
ε
ε
a
s
’
a
s
ω
ω
ω
ω
V’
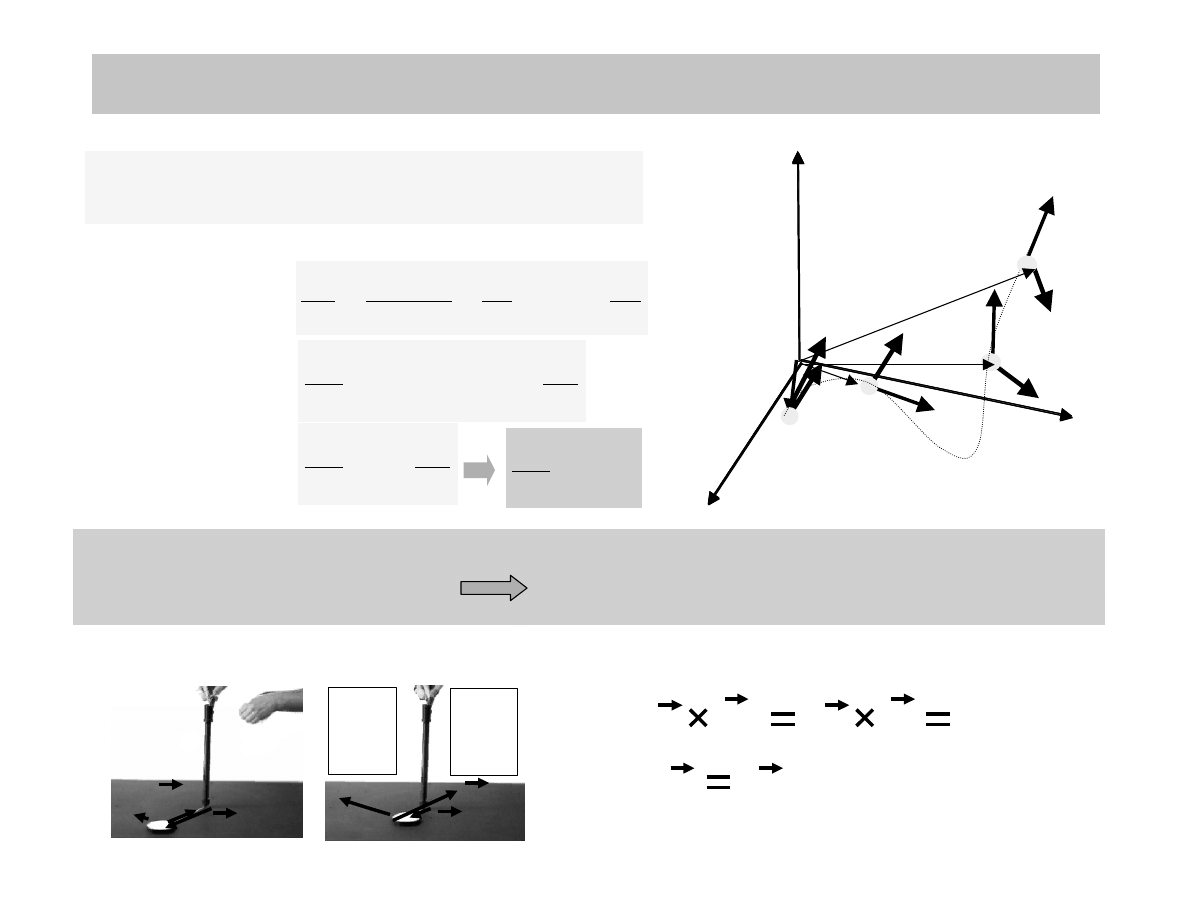
MOMENT SIŁY
Moment siły F przyłożonej do bryły w punkcie o wektorze
wodzącym r, w stosunku do początku inercjalnego układu
odniesienia wynosi
F
r
N
r
r
r
×
≡
Ruch obracającego się ciała można zmienić przykładając
do niego moment siły
x
y
z
F
r
N=r × F
Jeśli sił jest więcej, to całkowity
moment jest sumą wektorową
wszystkich momentów
r
1
F
1
N
1
=r
1
×
F
1
∑
×
=
i
i
i
F
r
N
r
r
r
Efekt przyłożenie siły F do ciała, które może się obracać zależy od:
wielkości siły
odległości punktu przyłożenia od osi obrotu
kąta przyłożenia siły w stosunku do prędkości punktu przyłożenia
MOMENT PĘDU
Efektem przyłożenie momentu siły N do ciała, jest nadanie mu ruchu obrotowego
Moment pędu bryły w stosunku do początku
inercjalnego układu odniesienia wynosi
∑
×
≡
i
i
i
p
r
L
r
r
r
Moment pędu i moment siły to pojęcia, które można stosować do dowolnego ruchu,
nie tylko obrotowego
Jeśli do ciała przyłożony jest moment siły, to zmienia się
moment pędu ciała
x
y
z
r
i
p
1
L=
Σ
r
i
×
p
i
ω
W jakich okolicznościach moment pędu może się
zmienić?
ZASADA ZACHOWANIA MOMENTU PĘDU
dt
p
d
r
p
dt
r
d
dt
)
p
r
(
d
dt
L
d
r
r
r
r
r
r
r
×
+
×
=
×
=
dt
p
d
r
)
v
m
v
(
dt
L
d
r
r
r
r
r
×
+
×
=
dt
p
d
r
dt
L
d
r
r
r
×
=
Szybkość zmiany
momentu pędu
wynosi:
x
z
F
y
r
p
Jeśli brak jest zewnętrznego momentu siły to moment pędu układu mas jest zachowany
0
N
zewn
=
r
=
L
r
const
F
r
dt
L
d
r
r
r
×
=
F
x
z
x
y
p
p
x
z
x
y
F
x
F
p
z
x
y
r
F
i
ale
r
i
F
f
r
f
r
i
F
i
r
f
F
f
stąd
0
L
i
L
f
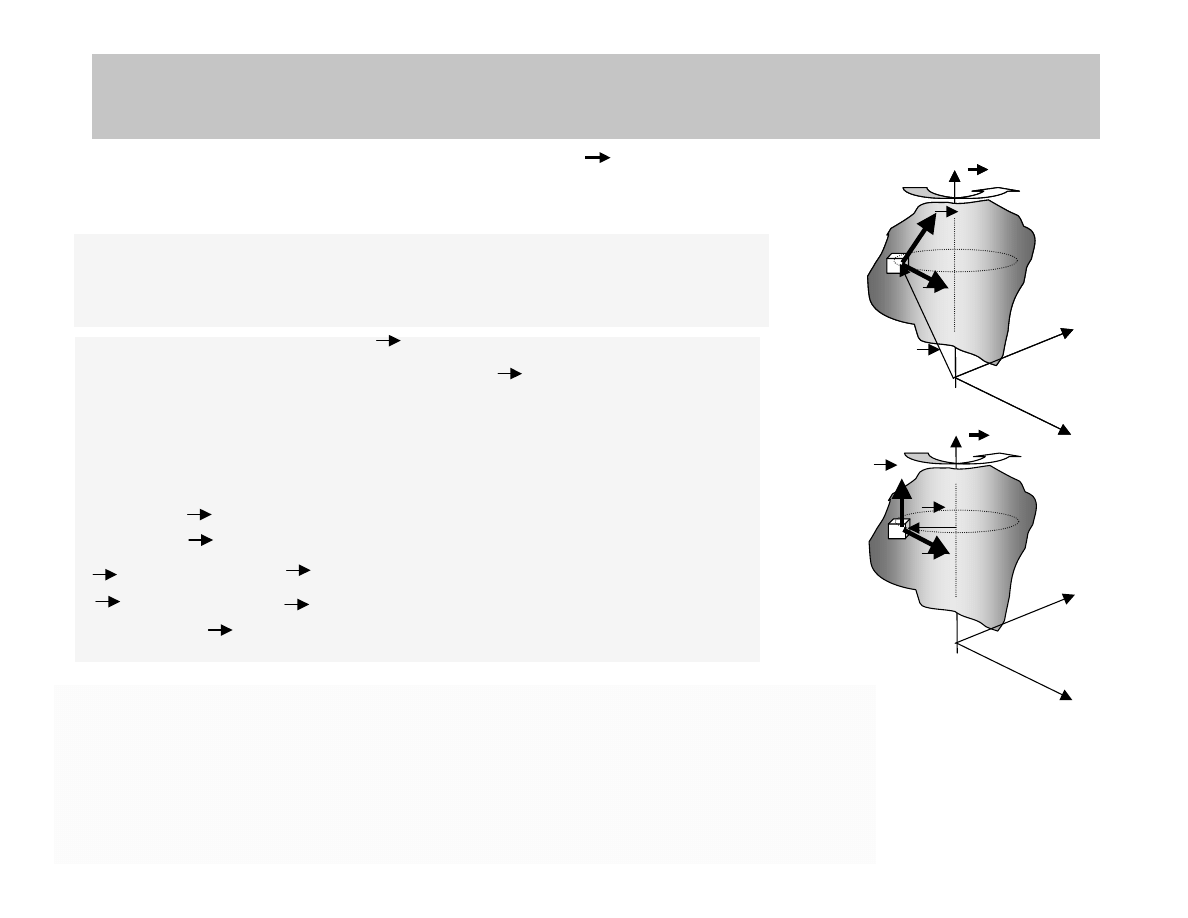
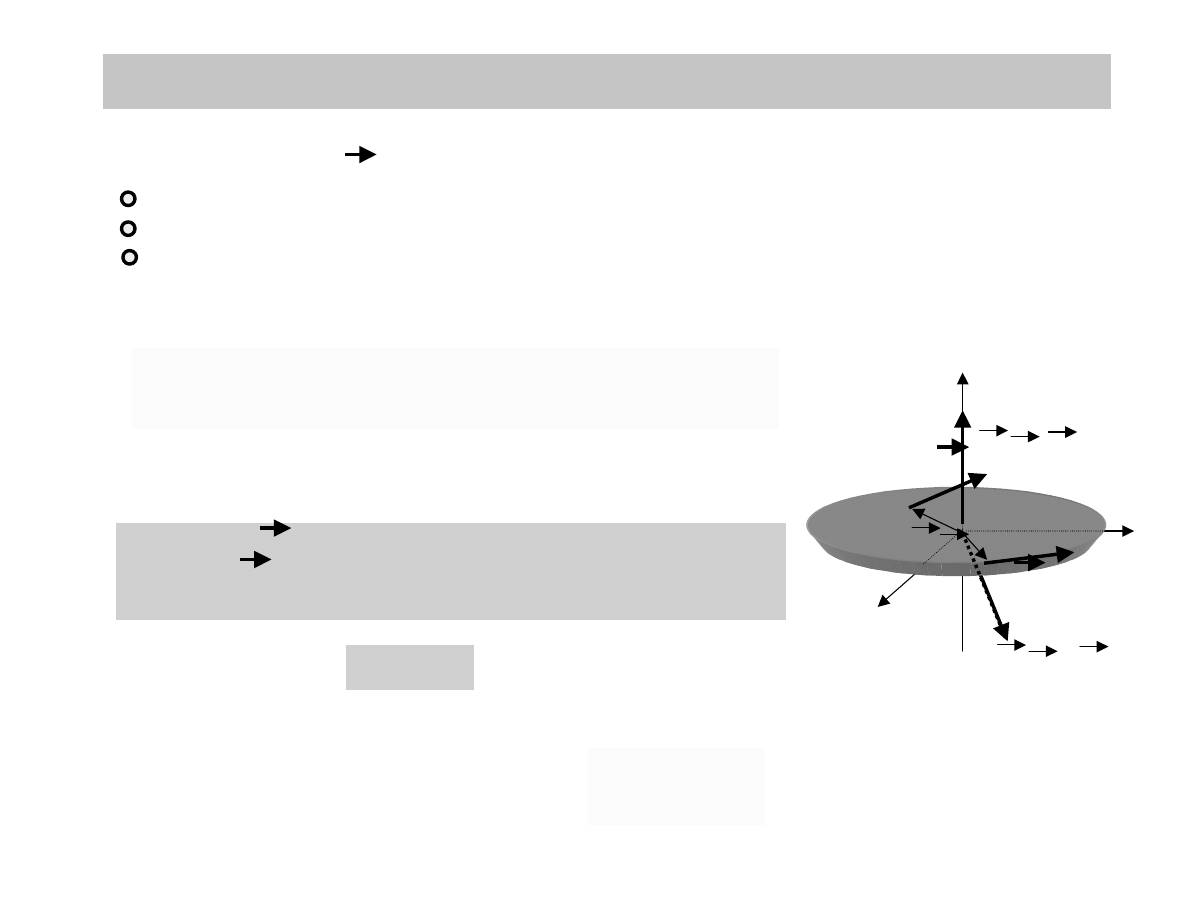
RUCH OBROTOWY BRYŁY SZTYWNEJ WZGLĘDEM
NIERUCHOMEJ OSI
Bryła obraca się ze stałą prędkością kątową ω
ω
ω
ω
wokół stałej osi z
obrót bryły względem
stałej osi w kierunku z
Jaki jest moment pędu bryły?
W ogólności jest to skomplikowane zagadnienie: trzeba
zsumować iloczyny
, w wyniku czego moment
pędu będzie zależał od rozłożenia masy w bryle.
i
i
i
m
V
r
∆
×
r
r
Ponieważ jednak prędkość V
i
każdego punktu bryły leży w
płaszczyźnie xy dlatego wyrażenie na L rozpada się na dwie
części:
ponieważ V
i
leży w płaszczyźnie xy. Tutaj:
L
xy
jest składową L w płaszczyźnie xy, a
L
z
jest składową L wzdłuż osi z
Obliczenie L
z
jest proste:
z
xy
i
i
i
i
i
i
i
i
i
i
i
i
i
L
L
∆
m
V
r
∆
m
V
r
∆
m
V
)
r
r
(
∆
m
V
r
L
r
r
r
r
r
r
r
r
r
r
r
r
+
=
×
+
×
=
=
×
+
=
×
=
∑
∑
∑
⊥
⊥
ll
ll
ponieważ prędkość elementu ∆m
i
masy w położeniu r
i
wynosi V
i
= r
i
ω
.
I-moment bezwładności
,
m
r
zˆ
m
r
r
zˆ
m
V
r
zˆ
m
V
r
L
i
2
i
i
i
i
i
i
i
i
i
z
i
∑
∑
∑
∑
∆
ω
=
∆
ω
=
∆
=
∆
×
=
⊥
⊥
⊥
⊥
⊥
r
r
r
∑
∆
=
⊥
i
2
m
r
I
i
ω
z
y
x
V
i
r
i⊥
L
z
ω
z
y
x
ω
z
y
x
V
i
r
i
L
i
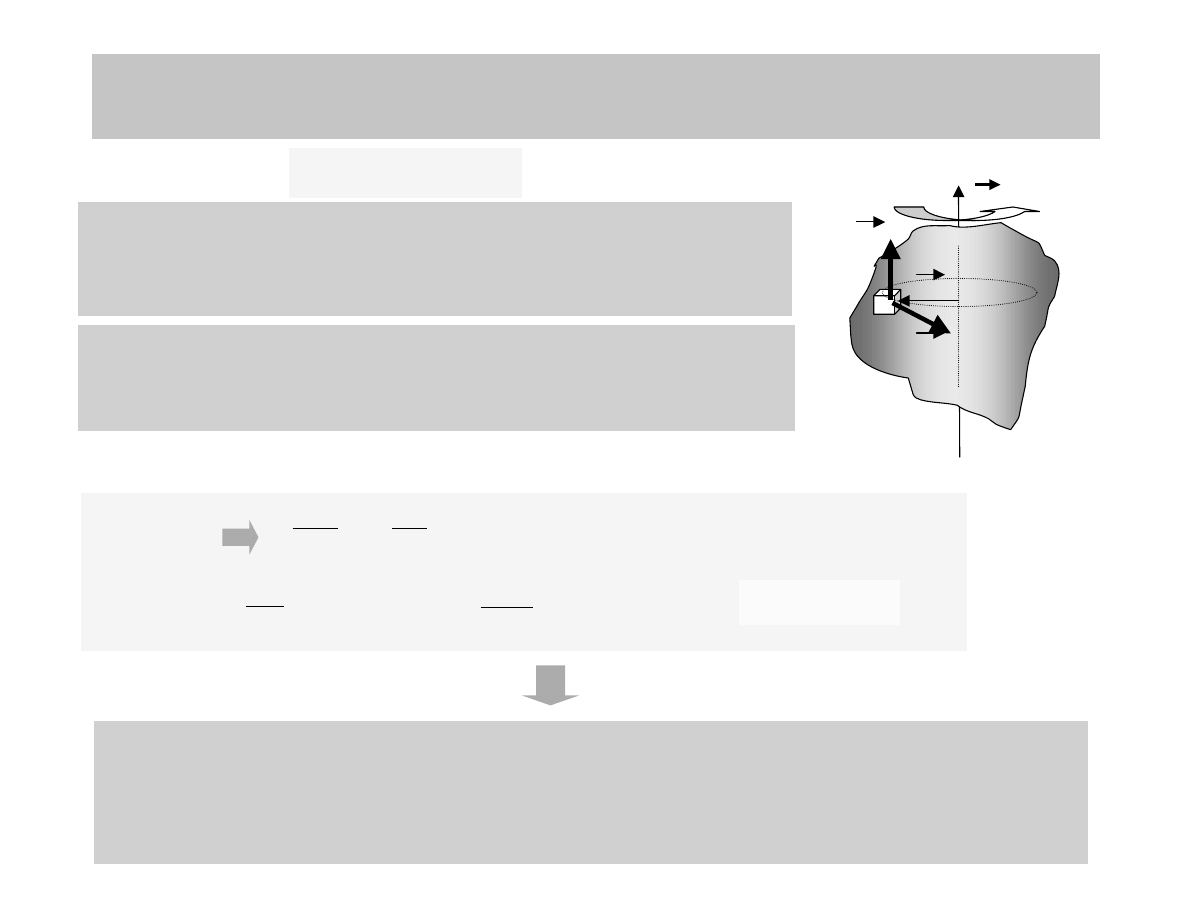
RUCH OBROTOWY BRYŁY SZTYWNEJ WZGLĘDEM
NIERUCHOMEJ OSI
Jeśli bryła obraca się ze stałą prędkością kątową ω
ω
ω
ω
wokół
stałej osi to składowa jej momentu pędu wzdłuż tej osi wynosi
I
L
z
ω
=
r
r
Jeśli obracająca się bryła jest symetryczna względem
osi obrotu, to jej całkowity momentu pędu wynosi
I
ω
L
r
r
=
Stąd:
I
L
z
ω
=
r
r
ω
ω
ω
ω
z
V
i
r
i⊥
L
z
w jaki sposób można zmienić moment pędu takiej bryły?
ale ponieważ
ε
⋅
=
ω
⋅
=
r
r
r
I
dt
d
I
dt
L
d
z
zewn
N
dt
L
d
r
r
=
z
,
zewn
z
N
dt
dL
=
I
L
z
ω
=
r
r
czyli
ε
⋅
= I
N
z
,
zewn
więc:
Składowa przyśpieszenia kątowego wzdłuż osi obrotu ustalonej w układzie inercjalnym
(lub przechodzącej przez środek masy), zależy od składowej zewnętrznego momentu
siły wzdłuż tej osi
ε
⋅
=
r
r
I
N
zewn
Jeśli obracająca się bryła jest symetryczna względem
osi obrotu, to jej całkowity momentu pędu wynosi
I
ω
L
r
r
=
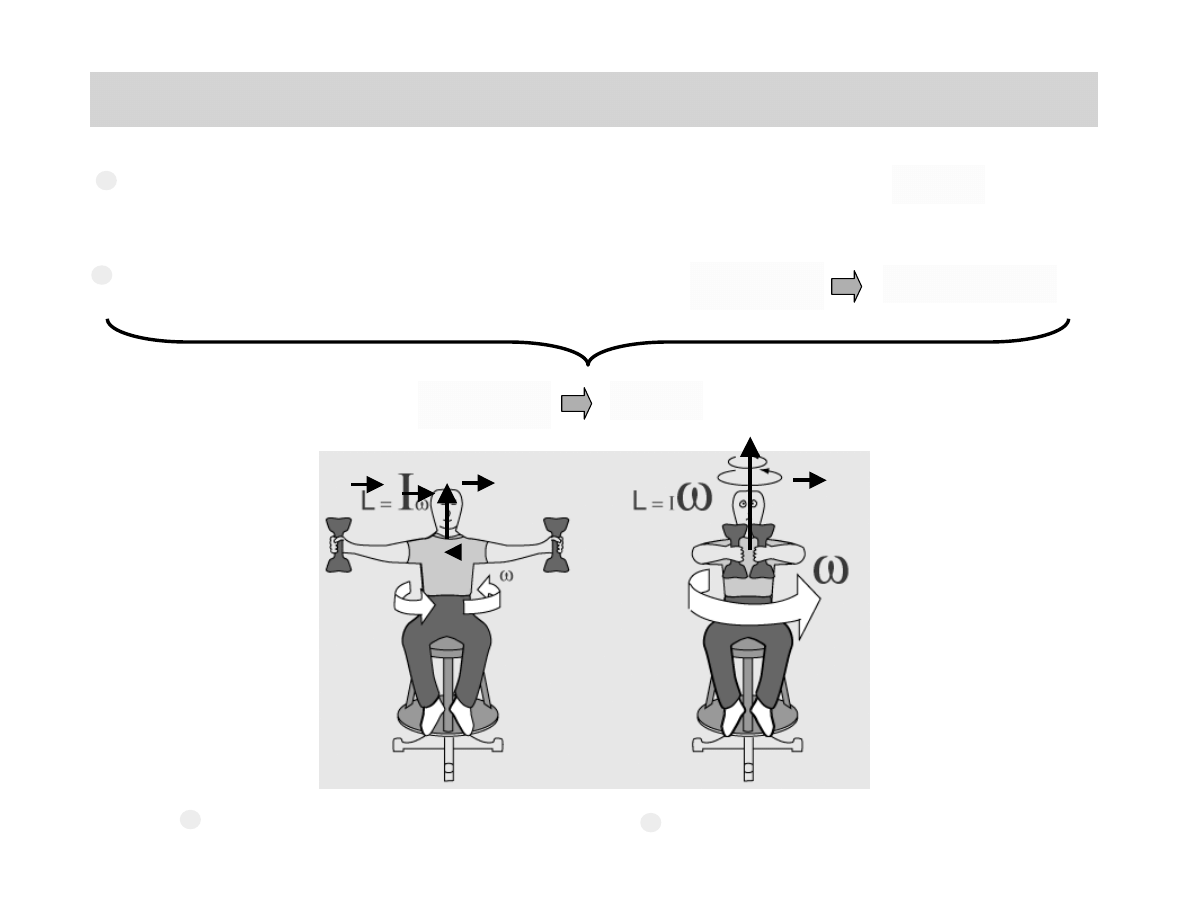
PRZYKŁAD: STOLIK OBROTOWY
Jeśli brak jest zewnętrznego momentu siły to
moment pędu układu mas jest zachowany
0
N
zewn
=
r
const
L =
r
0
N
zewn
=
r
I
ω
L
r
r
=
ω
ω
ω
ω
ω
Ciężarki odległe od osi obrotu:
mała prędkość kątowa
Ciężarki bliskie osi obrotu: duża
prędkość kątowa
Rysunek skopiowane z
http://hyperphysics.phy-astr.gsu.edu/
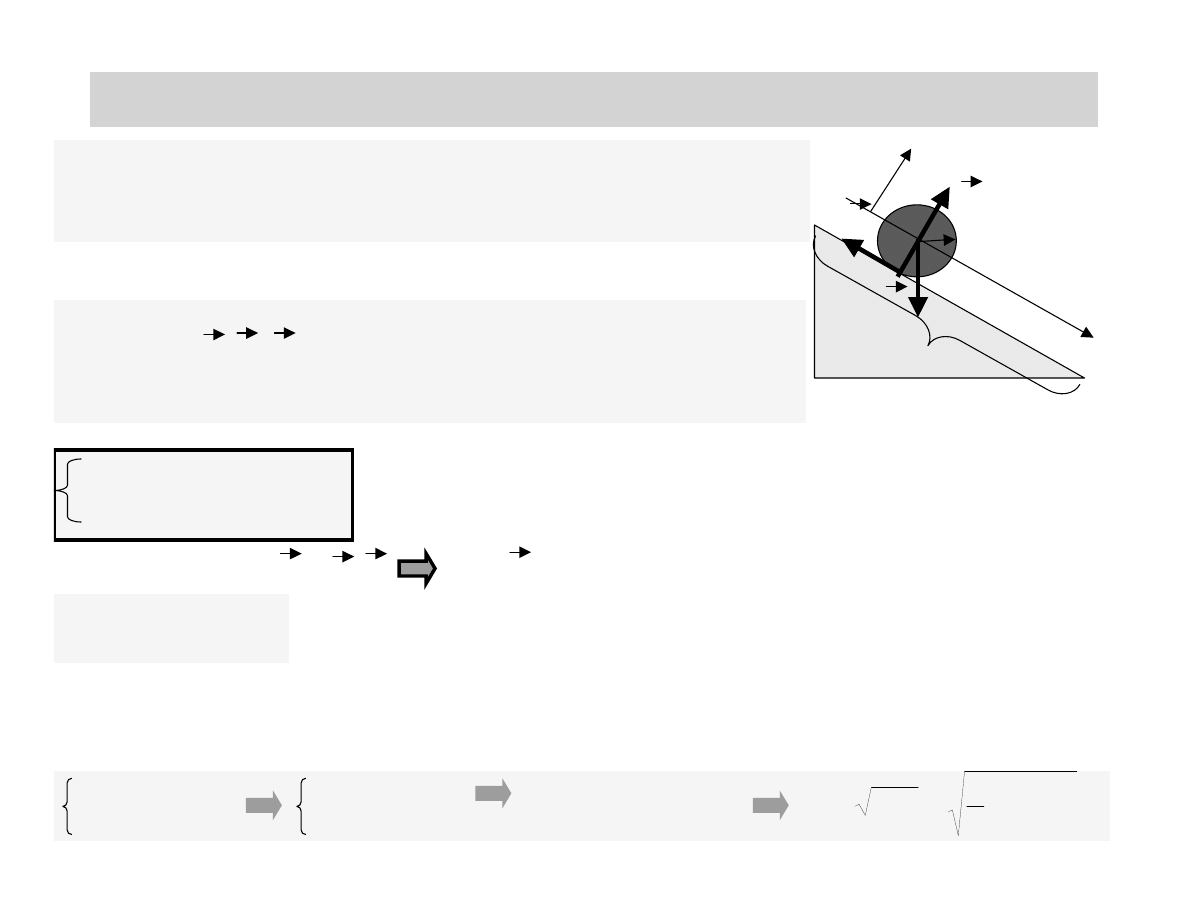
PRZYKŁAD: TOCZENIE PO RÓWNI
Pełny walec o masie M i promieniu r toczy się bez poślizgu po
równi o dl. L nachylonej pod kątem α do poziomu. Ile wynosi
prędkość środka masy walca w najniżej położonym punkcie równi?
T
G
R
N
N
N
I
T
G
R
M
a
r
r
r
r
r
r
r
r
+
+
=
ε
+
+
=
Opisuje ruch środka masy
Opisuje ruch obrotowy względem środka masy
Każdy z momentów N
F
to rXF tylko T ma niezerowy moment siły względem osi obrotu.
Ma=Mgsinα-T
Tr = Iε
Tr=(1/2)Mr*a
T=(1/2)M*a
a=2/3gsinα
Ma=Mgsinα-T
Ma=Mgsinα-T
Rzut sił i przyśpieszenia na kierunek x
Rzut momentów sił i przyśpieszenia kątowego na kierunek z
Ponieważ I dla walca wynosi I=(1/2)Mr
2
, dlatego Tr=(1/2)Mr
2
*ε.
Jeśli toczenie bez poślizgu, to ruch postępowy środka masy i ruch obrotowy wokół osi obrotu
walca są powiązane: a=ε*r⇒ ε=a/r.
(Ponieważ V=at i L=at
2
/2)
α
=
=
sin
gL
3
4
La
2
V
Środek masy walca będzie się poruszał tak, jakby wszystkie siły
zewnętrzne (R, T i G) były do niego przyłożone, czyli będzie
poruszał się ruchem jedn. przyśp. wzdłuż równi. Walec będzie się
obracał względem osi przechodzącej przez ten środek masy.
ROZWIĄZANIE
α
G
R
T
L
x
y
r
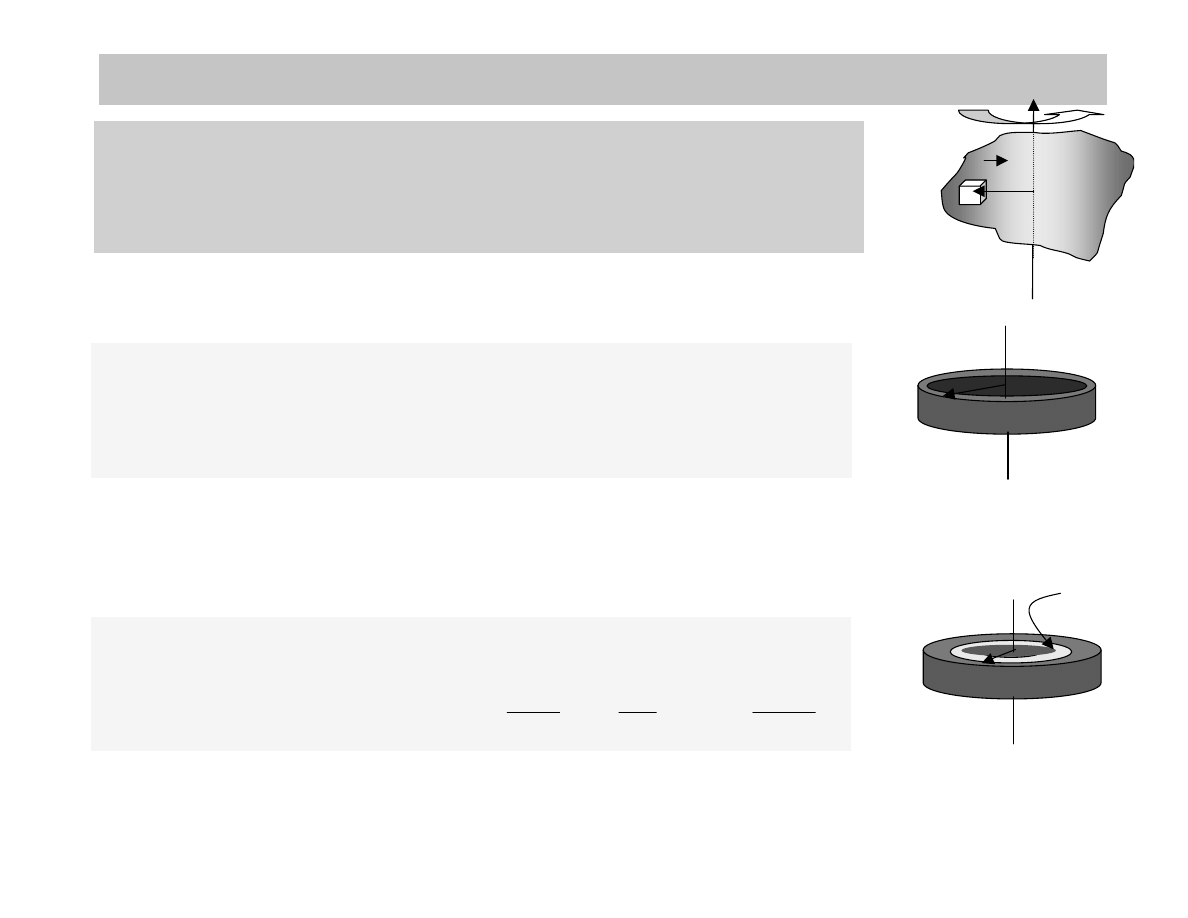
MOMENTY BEZWŁADNOŚCI: OBLICZANIE
ω
ω
ω
ω
r
i
Moment bezwładności względem osi obrotu, to suma mas i
odległości od osi obrotu
∫
∑
=
∆
=
dm
r
m
r
I
2
i
2
i
moment bezwładności obręczy
R
Ponieważ masa jest rozłożona symetrycznie i w odległości R
względem osi obrotu, to
m
R
dm
r
I
2
2
=
=
∫
moment bezwładności walca
R
dm’
Walec składa się z pierścieni o masie dm’ i w odległości r
względem osi obrotu, to
2
MR
dr
r
R
M
2
R
M
r
2
dr
r
'
dm
r
dm
r
I
2
R
0
3
2
2
R
0
2
2
2
=
⋅
=
π
⋅
π
⋅
=
=
=
∫
∫
∫
∫
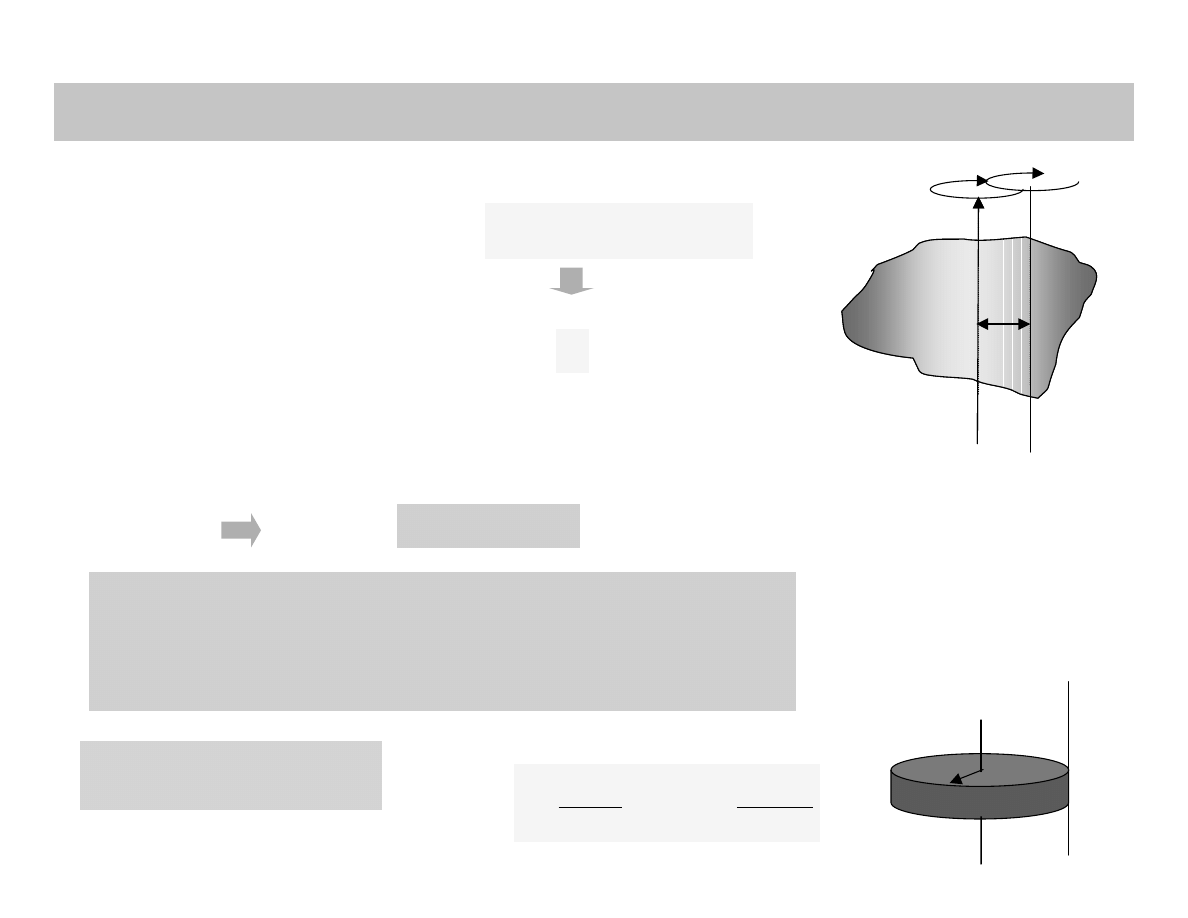
MOMENTY BEZWŁADNOŚCI: TWIERDZENIE STEINERA
Moment bezwładności względem osi
obrotu, to suma mas i odległości od
osi obrotu
∫
∑
=
∆
=
dm
r
m
r
I
2
i
2
i
Przykład: moment
bezwładności walca
2
MR
3
MR
2
MR
I
2
2
2
=
+
=
R
oś obrotu
Moment bezwładności względem dowolnej osi jest równy
momentowi bezwładności względem osi do niej równoległej i
przechodzącej przez środek masy plus iloczyn masy przez
kwadrat odległości między obiema osiami
∑
+
=
i
2
∆
m
a
I
0
I
śm
Oznaczmy przez I
0
moment
bezwładności jeśli oś obrotu
przechodzi przez środek masy
0
I
a
A jaki jest moment bezwładności względem innej osi, nie
przechodzącej przez środek masy?
śm
ENERGIA KINETYCZNA RUCHU OBROTOWEGO
Jeśli bryła obraca się wokół stałej osi to całkowita energia kinetyczna jest sumą energii
kinetycznych poszczególnych mas ∆m:
∑
∑
∑
∆
ω
=
ω
∆
=
∆
=
i
i
2
i
i
2
2
i
i
i
2
i
i
K
r
m
2
1
)
r
(
m
2
1
v
m
2
1
E
PRZYKŁAD:
α
h
T
L
E
p
=mgh
Korzystając z zasady zachowania energii obliczyć prędkość
środka masy walca u podnóża równi
E
K
=(mV
2
+Iω
2
)/2
Energia potencjalna na szczycie przekształca się w energię
kinetyczna ruchu postępowego i obrotowego
E
p
=E
K
(mV
2
+Iω
2
)/2=mgh
Ale:
I=mr
2
/2 i ω=V/r, to
α
=
⇒
α
=
α
=
+
sin
gL
3
4
V
sin
gL
4
3
V
sin
mgL
r
V
2
mr
2
1
2
mV
2
2
2
2
2
I
2
1
E
2
K
ω
=
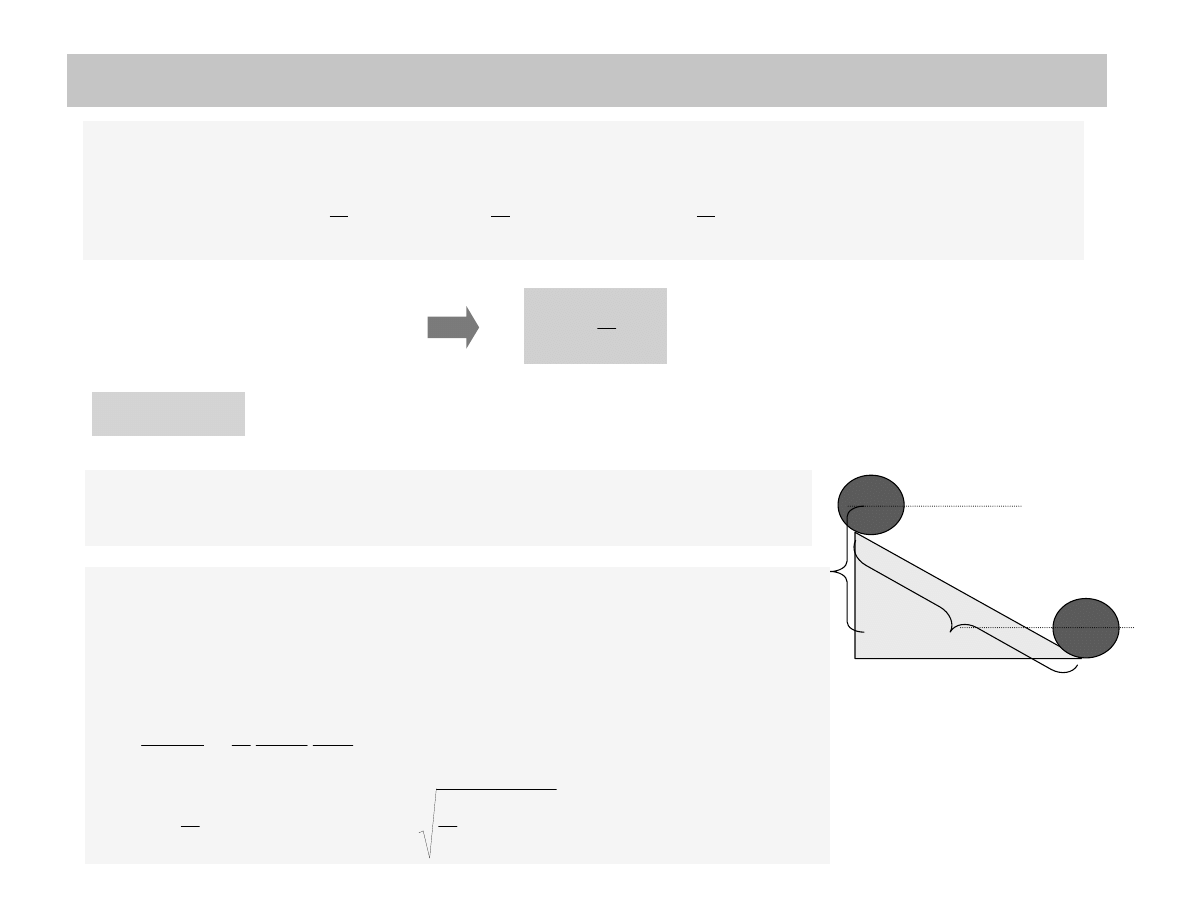
Bąk symetryczny podparty u podstawy,
wiruje z bardzo dużą prędkością kątową ω.
Jego chwilowy moment pędu wynosi L=Iω
ω
ω
ω
,
czyli skierowany jest wzdłuż osi obrotu. Jaki
będzie ruch bąka, jeśli przestanie działać
podtrzymująca go siła?
r
sm
L
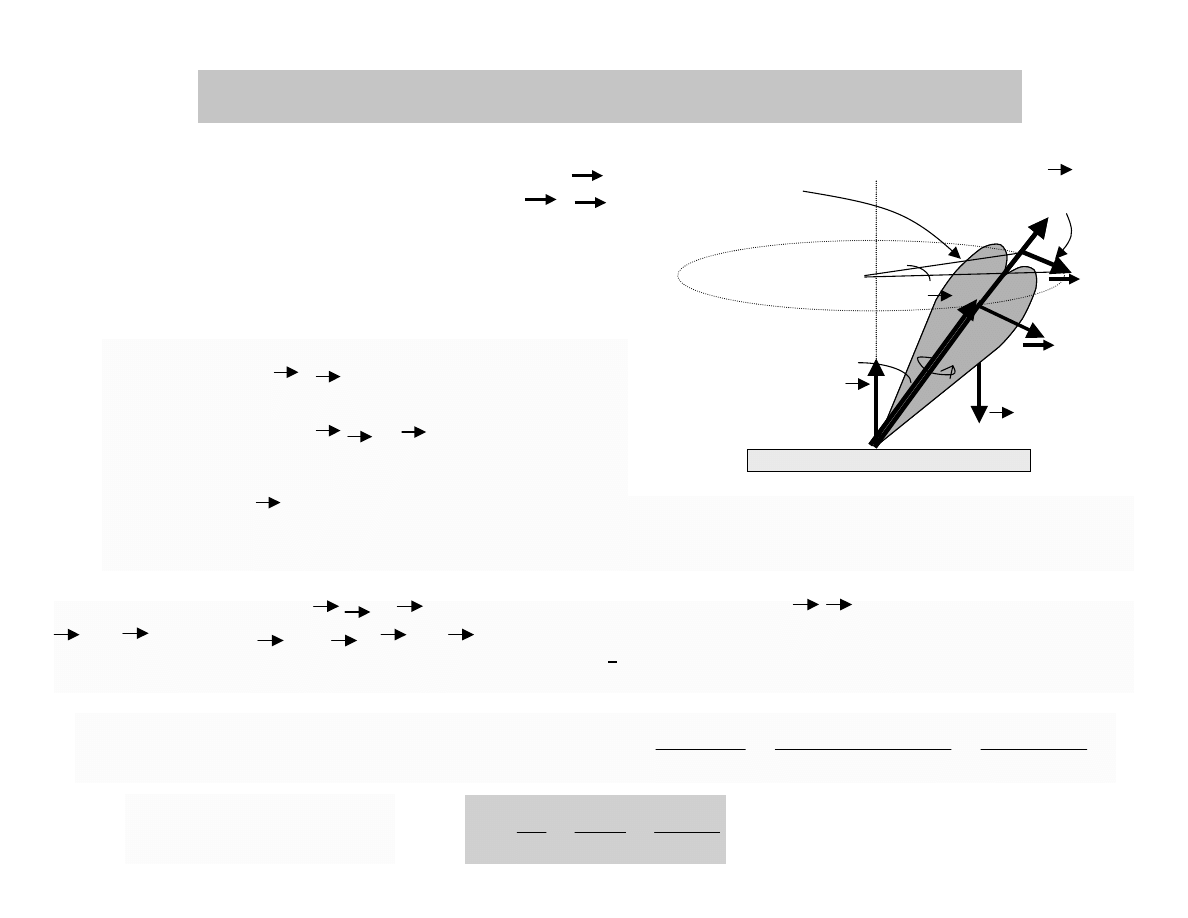
PRECESJA
R
G
- siła reakcji R podłoża przyłożona do punktu podparcia (moment siły pochodzący od tej siły
wynosi 0).
Na bąk działają dwie siły:
- ciężkości G=mg, (moment siły z nią
związany,
obliczony
względem
punktu
podparcia, wynosi N=r
sm
XG i jest skierowany
ll do podłoża),
r
sm
N
dL
Całkowity moment siły N=r
sm
X G powoduje zmianę momentu pędu dL=Ndt, czyli w kierunku ⊥ do
L (bo N jest ⊥ do r
sm
, a r
sm
ll L). ⇒ L obraca się (precesuje) wokół kierunku równoległego do
działającej siły.
dθ
ω
=
=
θ
=
Ω
I
mgr
L
Gr
dt
d
sm
sm
α
Lsinα
dL=r
sm
Gsinα
Ponieważ dL=r
sm
Gsin(α)dt, a kąt dθ wynosi:
L
dt
r
G
sin
L
dt
sin
r
G
sin
L
dL
d
sm
sm
⋅
⋅
=
α
⋅
⋅
α
⋅
⋅
=
α
⋅
=
θ
więc prędkość kątowa
precesji Ω:
Wyszukiwarka
Podobne podstrony:
16 Zasada zachowania momentu pędu
Zasada zachowania momentu pędu w Piłce Nożnej
22 zasada zachowania momentu p�du
11Zasada zachowania momentu pedu ukladu czastek
ZASADA ZACHOWANIA PĘDU I MOMENTU PĘDU i REAKCJA HYDRODYNAMICZNA
10 zasada zachowania pędu II
ZASADA ZACHOWANIA PĘDU, STUDIA, SEMESTR I, Mechanika, Mechanika Wyklady, Mechanika net
09 Zasada zachowania pedu (10)
09 Zasada zachowania pędu Iid 8057
09 zasada zachowania pędu
lista 06 zasada zachowania pędu
pawlikowski, fizyka, praca i energia; zasada zachowania pędu
zasada zachowania pędu, studia, fizyka
więcej podobnych podstron