
Wiesław WSZOŁEK
Wiesław WSZOŁEK
Akademia Górniczo-
Akademia Górniczo-
Hutnicza
Hutnicza
Podstawy
Podstawy
Automatyki
Automatyki
Wykład 4
Wykład 4
Własności dynamiczne
Własności dynamiczne
układów liniowych
układów liniowych
Wykład 4
Wykład 4
Własności dynamiczne
Własności dynamiczne
układów liniowych
układów liniowych

2
Wprowadzenie
Sposoby
oceny
własności
układów
liniowych
Wprowadzenie
do
charakterystyk
czasowych
Przykłady
podstawowych
elementów
automatyki i ich charakterystyki czasowe
Plan wykładu:
Plan wykładu:

3
Wprowadzenie
analizując i projektując układy automatyki musimy
mieć
możliwość porównywania ich właściwości,
w tym celu stosuje się określone testowe sygnały
wejściowe, umożliwiające porównanie
odpowiedzi badanych układów na te sygnały,
powszechnie
wykorzystywanymi
testowymi
sygnałami wejściowymi są funkcje:
skokowa
,
liniowa
,
impulsowa
,
sinusoidalna
, itp,
dla tych sygnałów testowych można łatwo
przeprowadzić analizę matematyczną i
eksperymentalną układów sterowania, ponieważ
sygnały te są bardzo prostymi funkcjami do
wygenerowania.
4
Sposoby oceny własności układów liniowych
właściwości
układu
liniowego
o
stałych
parametrach (stacjonarnego) można opisać za
pomocą liniowego równania różniczkowego o
stałych współczynnikach, którego postać ogólna
jest następująca
z powyższego równania wynika
charakterystyka
statyczna
, na podstawie której wnioskujemy o
właściwościach statycznych układu
x
b
dt
x
d
b
dt
x
d
b
y
a
dt
y
d
a
dt
y
d
a
m
m
m
m
m
m
n
n
n
n
n
n
0
1
1
1
0
1
1
1
przy czym n>m
x
b
y
a
0
0

5
właściwości dynamiczne układu ocenia się
zwykle
na
podstawie przebiegu sygnału wyjściowego y(t),
będącego wynikiem wprowadzenia określonego
sygnału wejściowego x(t)
istnieją dwie drogi podejścia do rozwiązania tego
zagadnienia:
analiza
przybliżona
(z
aproksymacji
odpowiedzi układu wnioskujemy o cechach
rozwiązania i o sposobie zmiany konfiguracji
układu, tak aby uzyskać wymaganą odpowiedź)
metoda
operatorowa
(znalezienie
przekształcenia
pozwa-lającego
zastąpić
równania
różniczkowo-całkowe
zwykłymi
równaniami algebraicznymi przekształcenie
Laplace’a)
Sposoby oceny własności układów liniowych
6
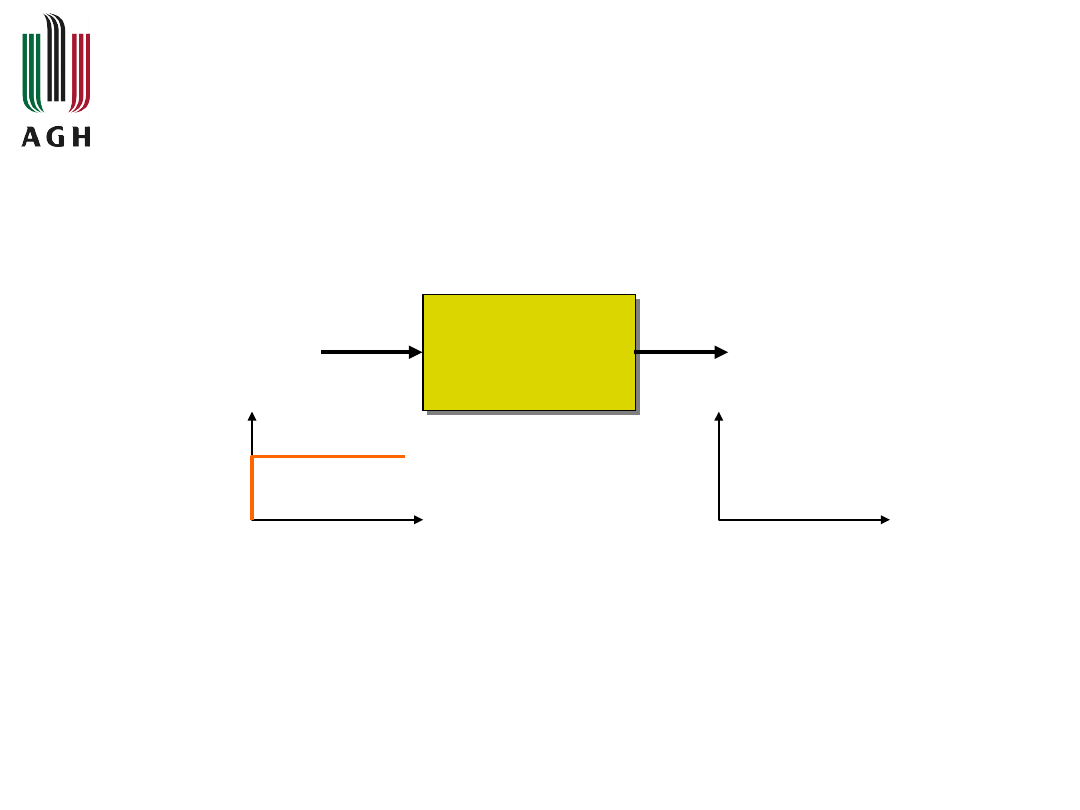
Wprowadzenie do charakterystyk czasowych
Charakterystyka czasowa
jest przebiegiem w
czasie odpowiedzi układu dynamicznego y(t) na
określone wymuszenie x(t)
Układ
dynamiczn
y
Układ
dynamiczn
y
x(t
)
y(t
)
?
?
t
x(t
)
t
y(t
)
s
X
s
G
s
Y
s
X
s
G
L
s
Y
L
t
y
1
1
G(s) – transmitancja
operatorowa
X(s) – transformata
wymuszenia
Y(s) – transformata
odpowiedzi
7
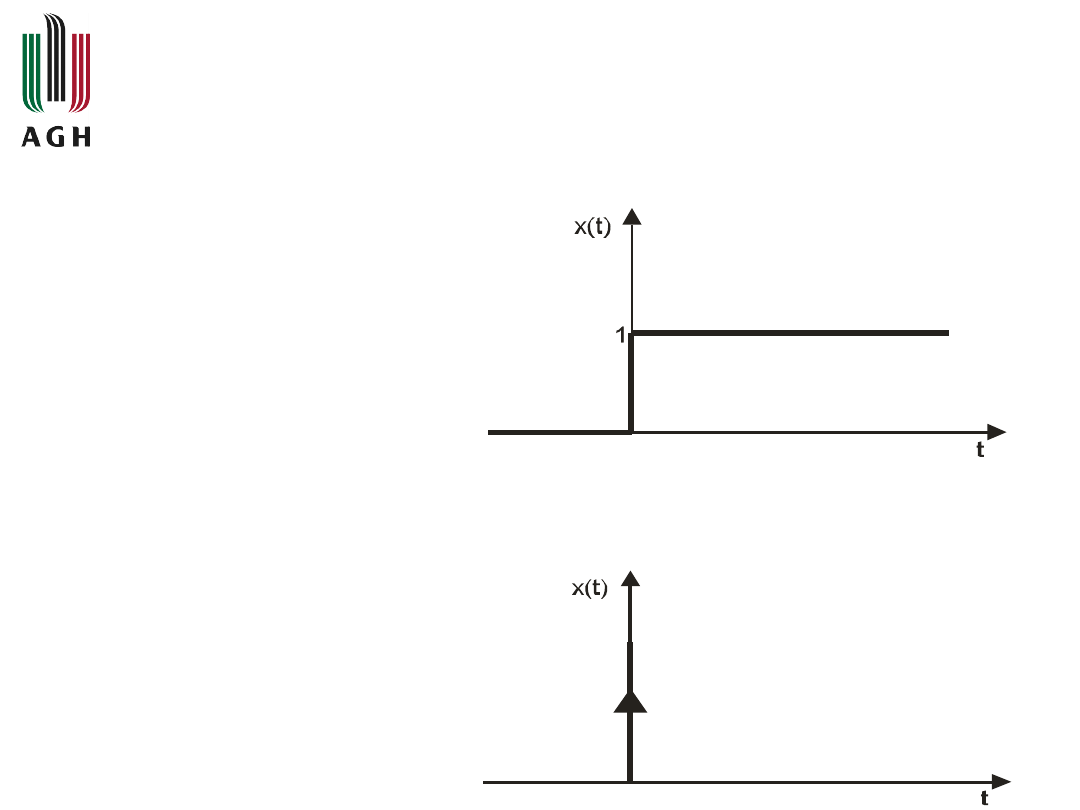
Najczęściej stosowanymi wymuszeniami
są:
0
dla
,
0
dla
,
0
)
(
)
(
t
t
t
t
x
skok jednostkowy 1(t
skok jednostkowy 1(t
)
)
(tzw. funkcja
Heaviside’a) - mówimy wówczas o
odpowiedzi skokowej h(t),
0
dla
,
1
0
dla
,
0
)
(
1
)
(
t
t
t
t
x
impuls Diraca
impuls Diraca
(t)
(t)
(tzw. funkcja wagi
układu) - mówimy wówczas o odpowiedzi
impulsowej g(t).

8
Przykłady podstawowych
elementów automatyki i ich
charakterystyki czasowe
Element proporcjonalny
(bezinercyjny)
Element inercyjny pierwszego
rzędu
Element całkujący
Element całkujący rzeczywisty
Element różniczkujący rzeczywisty
Element oscylacyjny
Element inercyjny drugiego rzędu
Element opóźniający
9
Element proporcjonalny
(bezinercyjny)
Postać równania opisującego element
proporcjonalny
)
(
)
(
t
x
K
t
y
gdzie:
K - współczynnik wzmocnienia
x(t) - sygnał wejściowy
y(t) - sygnał wyjściowy
K
s
X
s
Y
s
G
)
(
)
(
)
(
Transmitancja
operatorowa
10
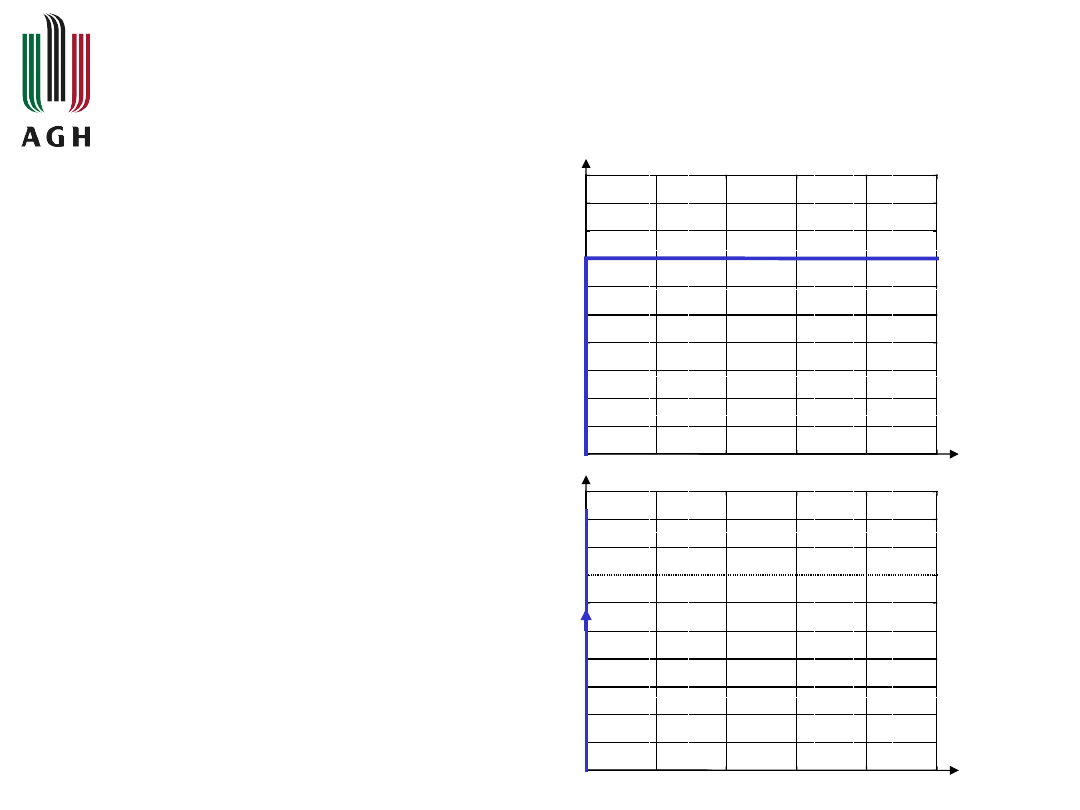
Charakterystyki czasowe elementów
proporcjonalnych
)
(
1
)
(
)
(
t
K
t
h
t
y
Odpowiedź
skokowa
)
(
)
(
)
(
t
K
t
g
t
y
Odpowiedź impulsowa
t
K
h(t)
t
g(t)
11
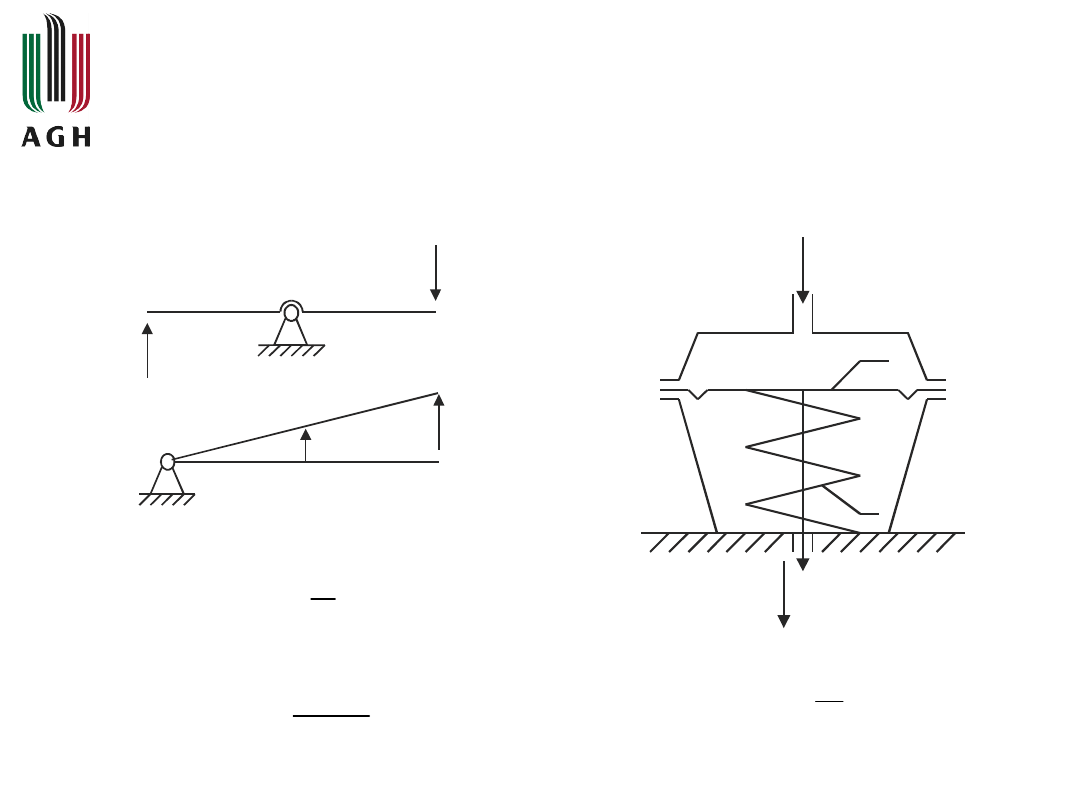
Przykłady elementów
proporcjonalnych
Mechaniczne układy
dźwigniowe
Siłownik pneumatyczny
)
(
)
(
t
x
a
b
t
y
)
(
)
(
t
x
b
a
a
t
y
)
(
)
(
t
x
k
A
t
y
a
a
b
b
x
x
y
y
p = x
y
A
k
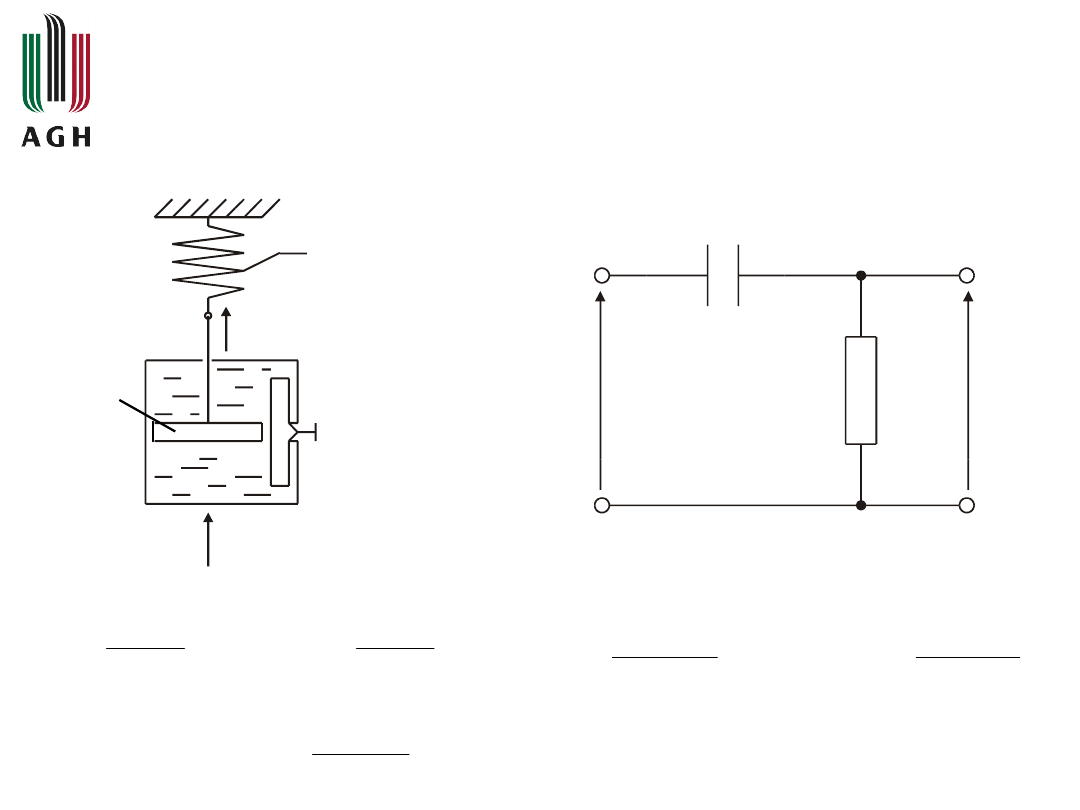
12
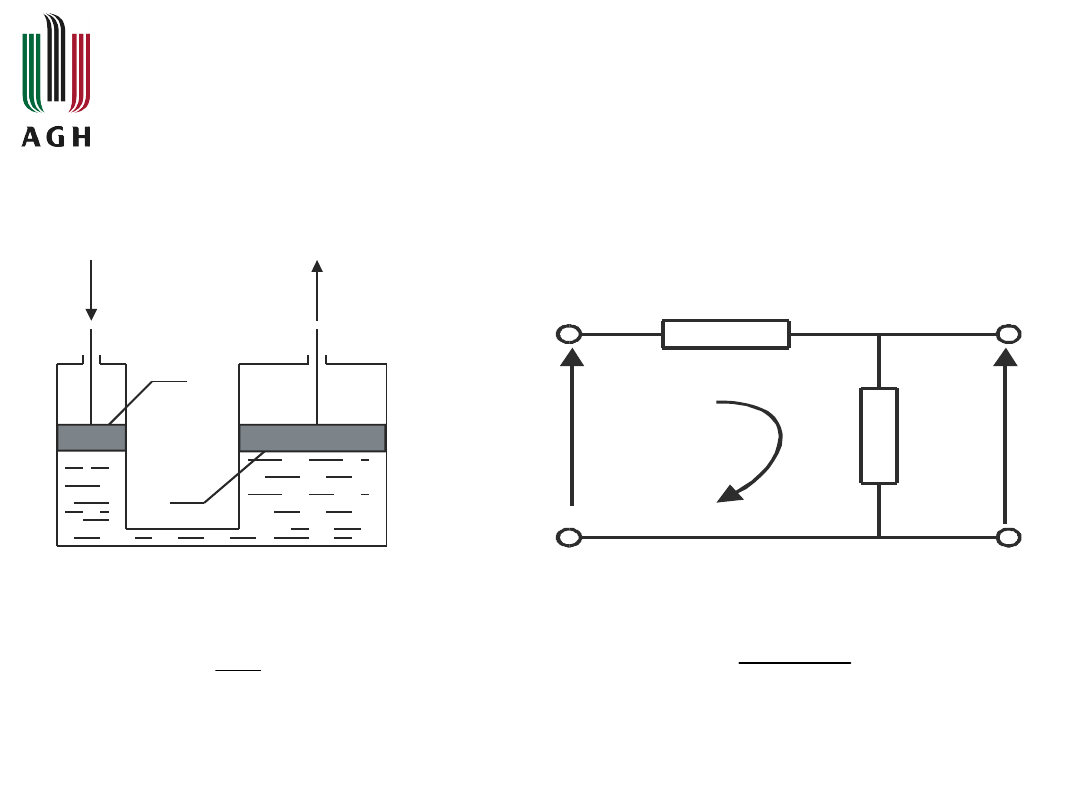
Prasa hydrauliczna
Rezystancyjny dzielnik
napięcia
)
(
)
(
1
2
t
x
A
A
t
y
)
(
)
(
2
1
2
t
u
R
R
R
t
u
x
y
F
1
= x
F
2
= y
A
1
A
2
Przykłady elementów
proporcjonalnych
R
1
R
2
i
U
x
U
y
13
Element inercyjny pierwszego
rzędu
Postać równania różniczkowego
Transmitancja operatorowa
)
(
)
(
)
(
t
Kx
t
y
dt
t
dy
T
1
)
(
)
(
)
(
Ts
K
s
X
s
Y
s
G
gdzie:
K - współczynnik
wzmocnienia
T - stała czasowa
14
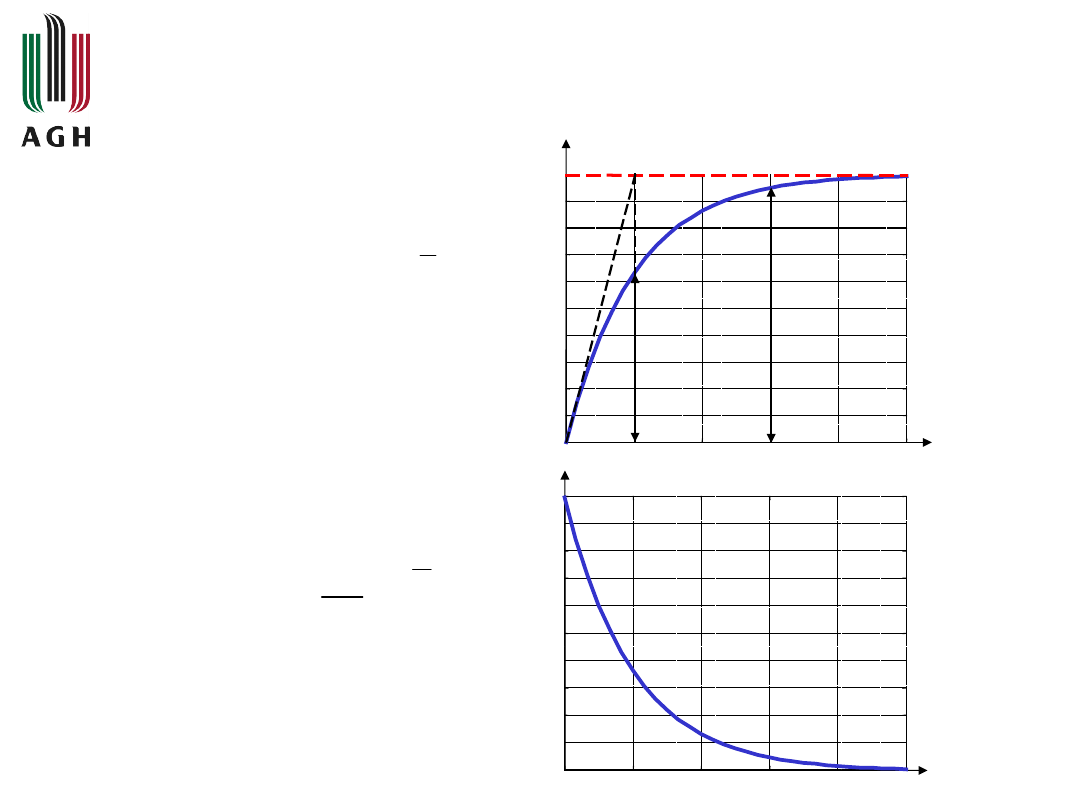
Charakterystyki czasowe elementów
inercyjnych 1-go rzędu
t
T
e
K
t
h
t
y
1
1
)
(
)
(
t
T
e
T
K
t
g
t
y
1
)
(
)
(
Odpowiedź
skokowa
Odpowiedź impulsowa
T
t
K/T
g(t)
t
h(t)
K
0,63 K
T
0,95 K
3T
15
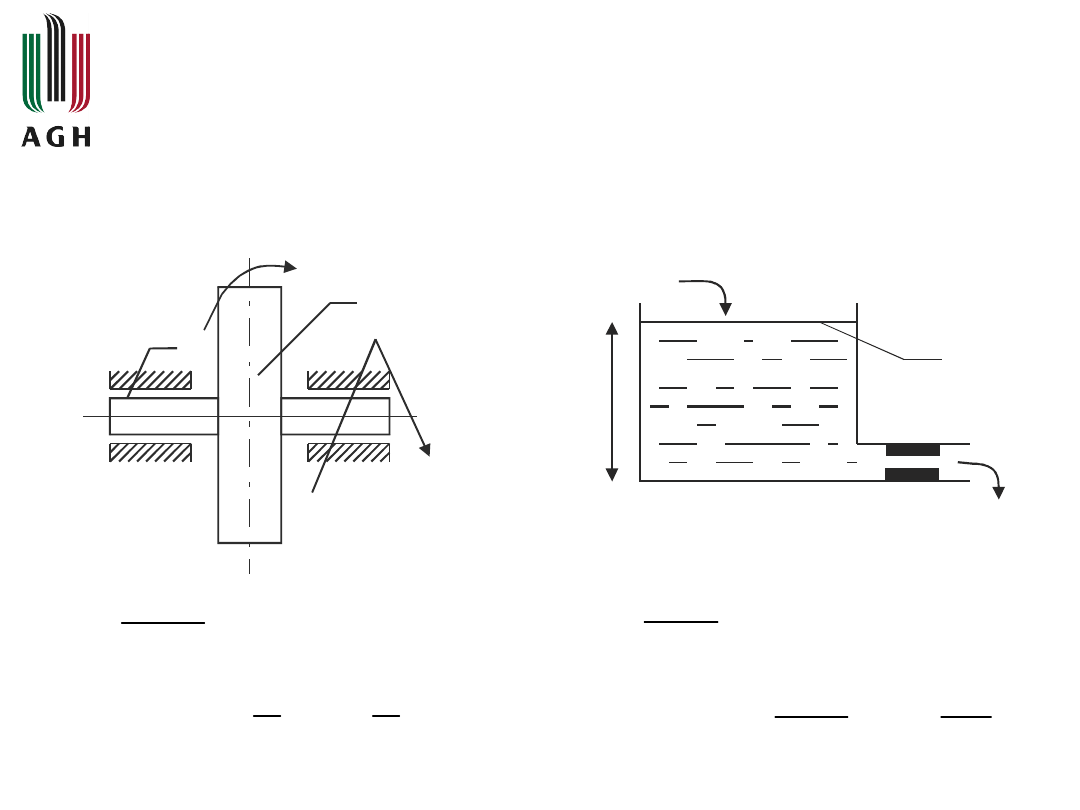
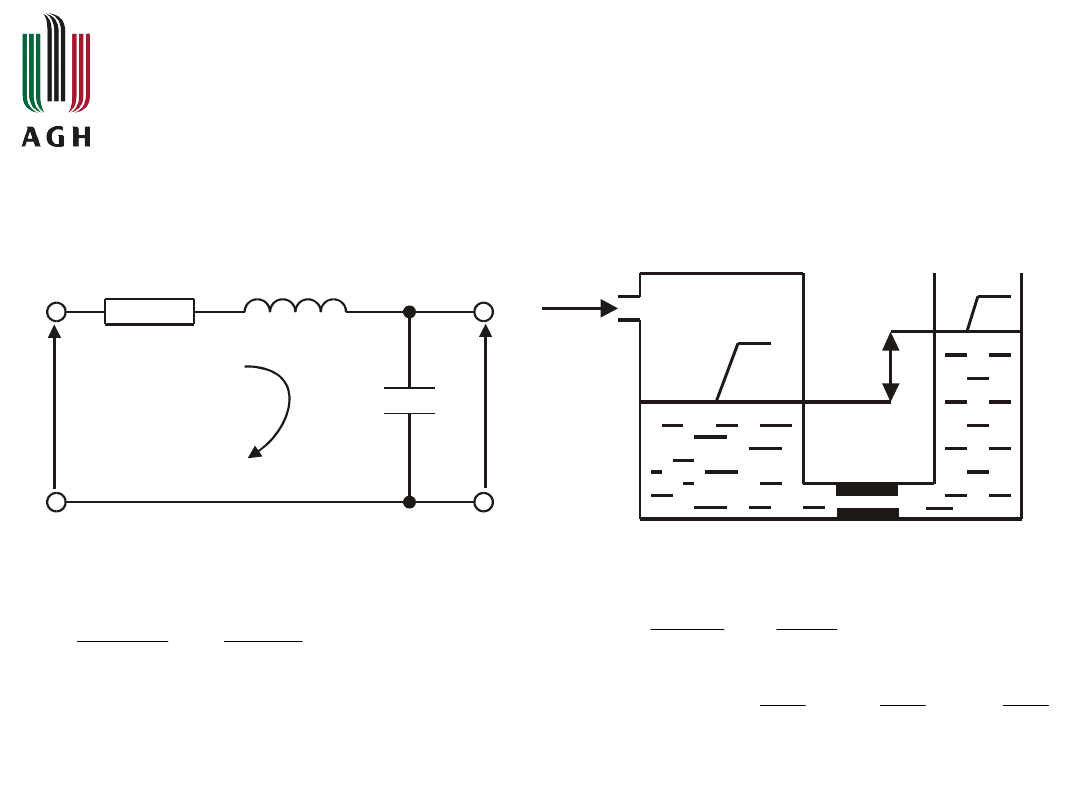
Przykłady elementów inercyjnych 1-
go rzędu
Masa wirująca na wale
Zbiornik z
cieczą
1
K
,
:
gdzie
)
(
)
(
)
(
I
T
t
M
K
t
dt
t
d
T
H
H
R
K
AR
T
t
q
K
t
h
dt
t
dh
T
,
:
gdzie
)
(
)
(
)
(
0
R
I
M
A
h
q
0
R
H
q
1
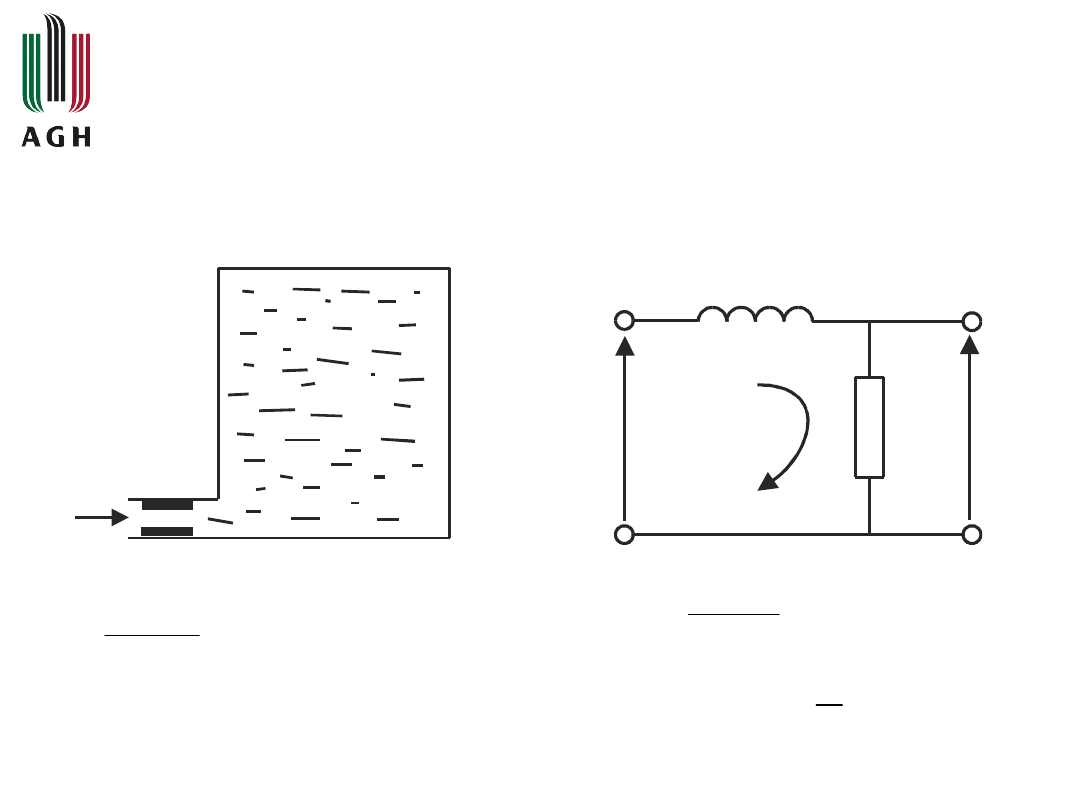
16
Zbiornik z
gazem
Układ LR
1
,
:
gdzie
)
(
)
(
)
(
K
R
C
T
t
p
t
p
dt
t
dp
T
p
p
x
y
y
1
,
:
gdzie
)
(
)
(
)
(
K
R
L
T
t
u
t
u
dt
t
du
T
x
y
y
L
R
u
x
u
y
i
Przykłady elementów inercyjnych 1-
go rzędu
p
x
p
y
V
C
p
R
p
17
Element całkujący
Postać równania różniczkowego
Transmitancja operatorowa
)
(
)
(
lub
)
(
)
(
t
x
dt
t
dy
T
t
x
K
dt
t
dy
s
T
s
G
s
K
s
X
s
Y
s
G
1
)
(
lub
)
(
)
(
)
(
gdzie:
K - współczynnik wzmocnienia
T - stała czasowa
18
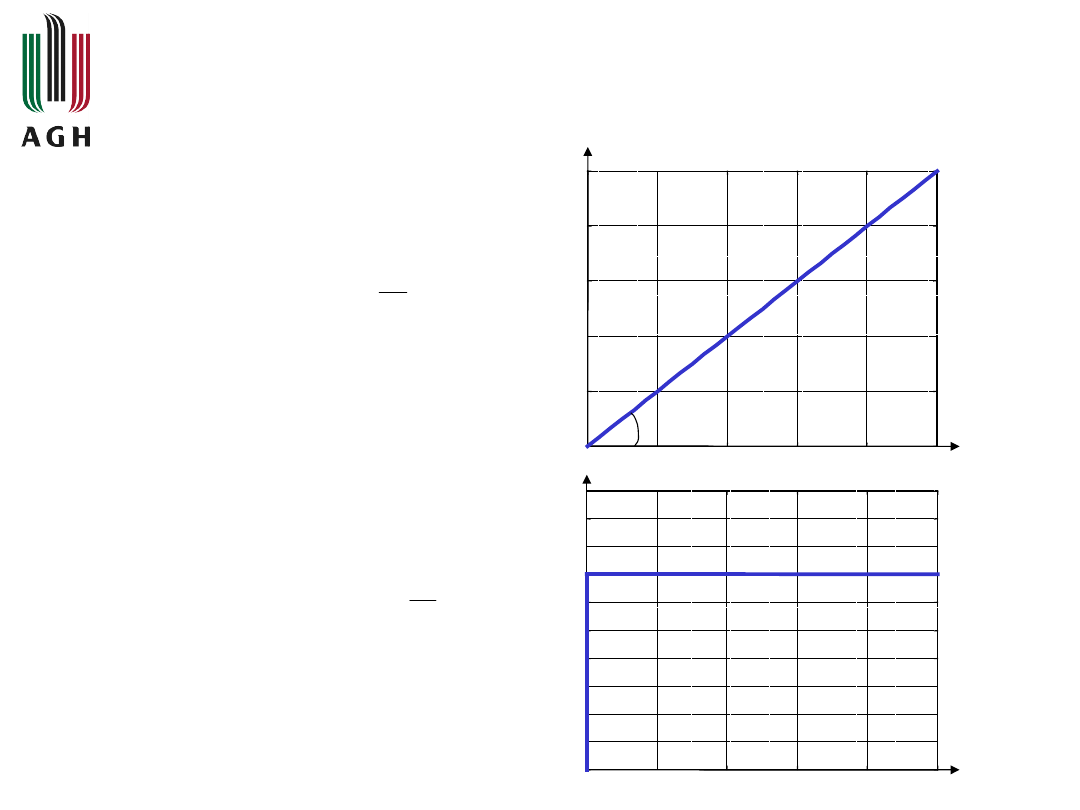
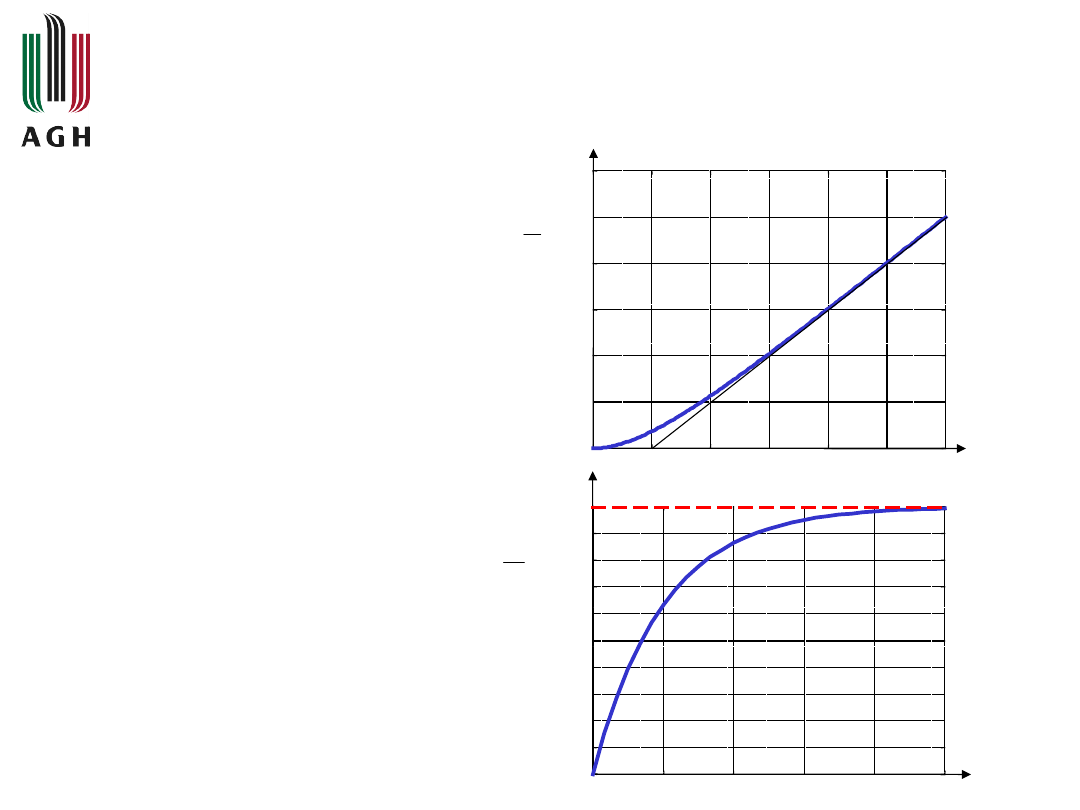
Charakterystyki czasowe elementów
całkujących
Odpowiedź skokowa
Odpowiedź
impulsowa
t
T
t
K
t
h
t
y
1
)
(
)
(
)
(
1
1
)
(
1
)
(
)
(
t
T
t
K
t
g
t
y
=arctg K
t
h(t)
t
K
g(t)
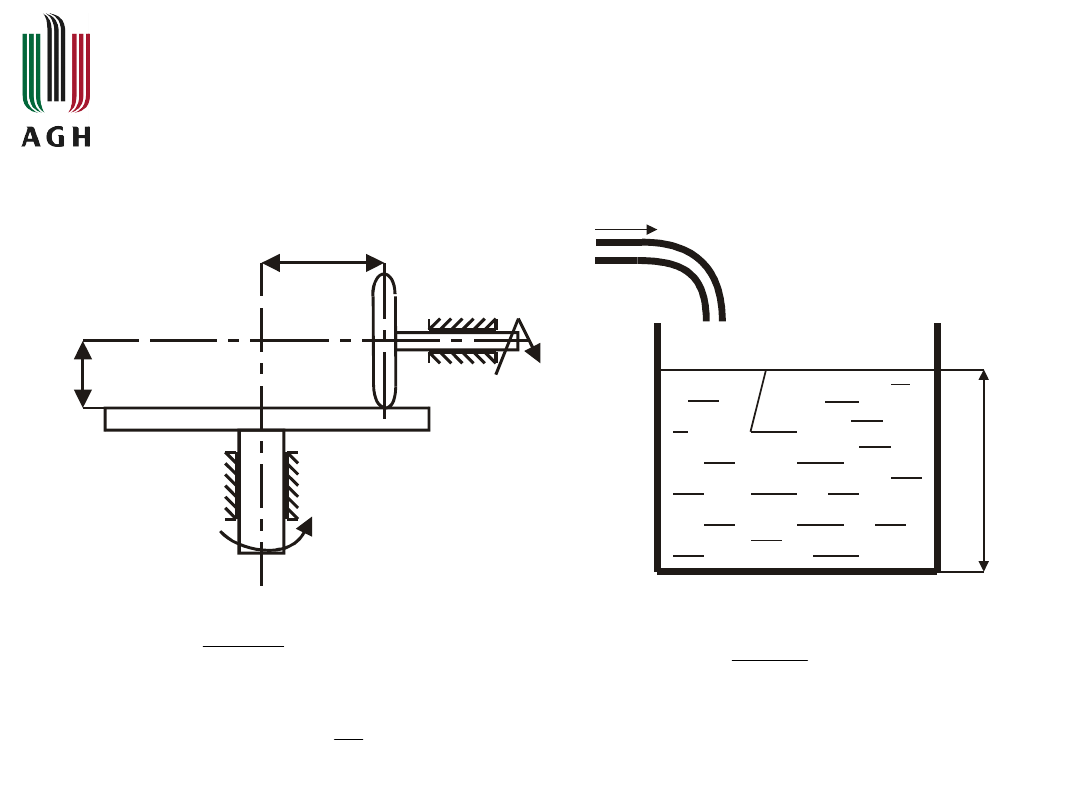
19
Przykłady elementów
całkujących
Przekładnia cierna
Zbiornik z
cieczą
A
T
t
Q
dt
t
dh
T
:
gdzie
)
(
)
(
r
T
t
x
dt
t
d
T
:
gdzie
)
(
)
(
x=Q
A
h=y
=con
st
x
=y
r
20
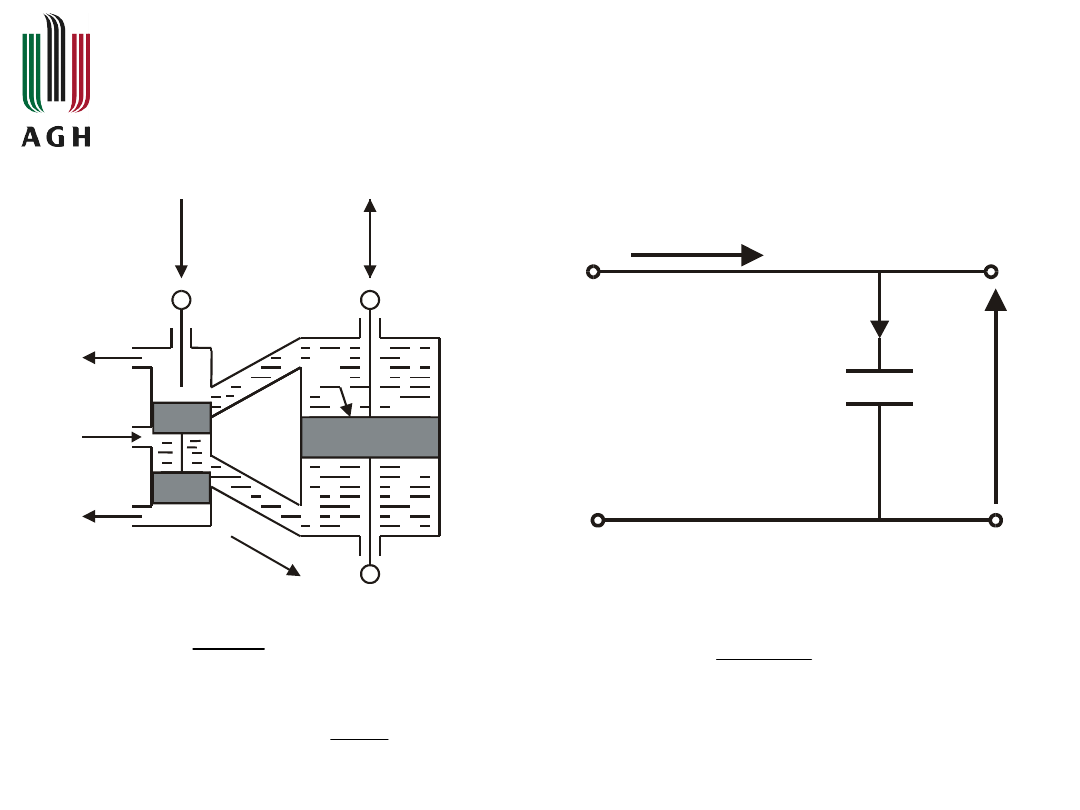
Przykłady elementów
całkujących
Zespół rozdzielacz – siłownik
Idealny kondensator
b
A
T
t
x
dt
t
dy
T
:
gdzie
)
(
)
(
C
T
t
i
dt
t
du
T
y
:
gdzie
)
(
)
(
C
i
i
u
y
P
S
P
S
P
Z
v=co
nst
y
x
A
21
Postać równania
różniczkowego
)
(
)
(
)
(
2
2
t
x
K
dt
t
dy
dt
t
y
d
T
Transmitancja operatorowa
)
1
(
)
(
)
(
)
(
Ts
s
K
s
X
s
Y
s
G
Element całkujący
rzeczywisty
gdzie K - współczynnik wzmocnienia
T - stała czasowa
22
)
1
(
)
(
)
(
T
t
e
KT
Kt
t
h
t
y
T
t
e
K
t
g
t
y
1
)
(
)
(
Odpowiedź
skokowa
Odpowiedź impulsowa
Charakterystyki czasowe elementów całkujących rzeczywistych
T
3T
t
g(t)
K
t
h(t)
T
23
1
2
1
2
2
1
,
:
gdzie
)
(
)
(
)
(
k
K
k
k
RJ
T
t
KU
dt
t
d
dt
t
d
T
S
1
2
2
2
2
2
1
,
:
gdzie
)
(
)
(
)
(
C
K
RC
T
t
Ki
dt
t
dU
dt
t
U
d
T
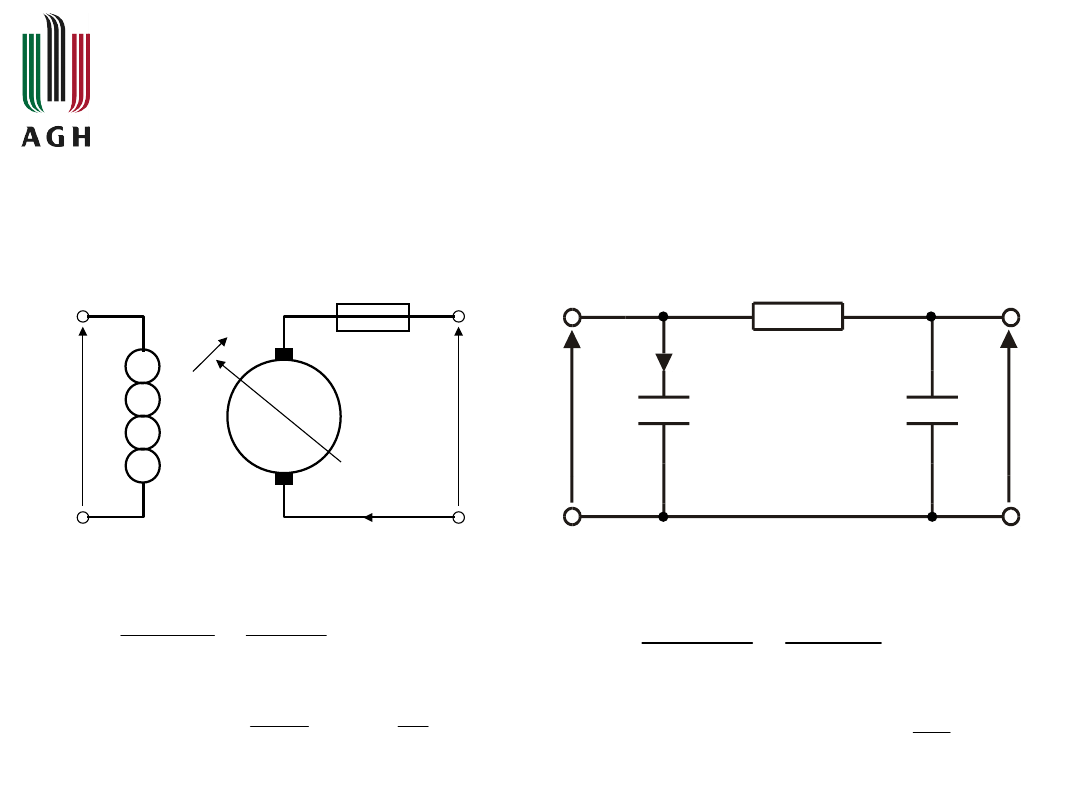
Przykłady elementów całkujących rzeczywistych
Silnik prądu
stałego
Czwórnik
RC
U
2
C
1
C
2
R
i
U
1
(t)
i
U
S
(t)
U
w
=
con
st
R
24
Element różniczkujący rzeczywisty
Postać równania
różniczkowego
Transmitancja operatorowa
gdzie K - współczynnik wzmocnienia
T - stała czasowa
dt
t
dx
K
t
y
dt
t
dy
T
)
(
)
(
)
(
1
)
(
)
(
)
(
Ts
s
K
s
X
s
Y
s
G
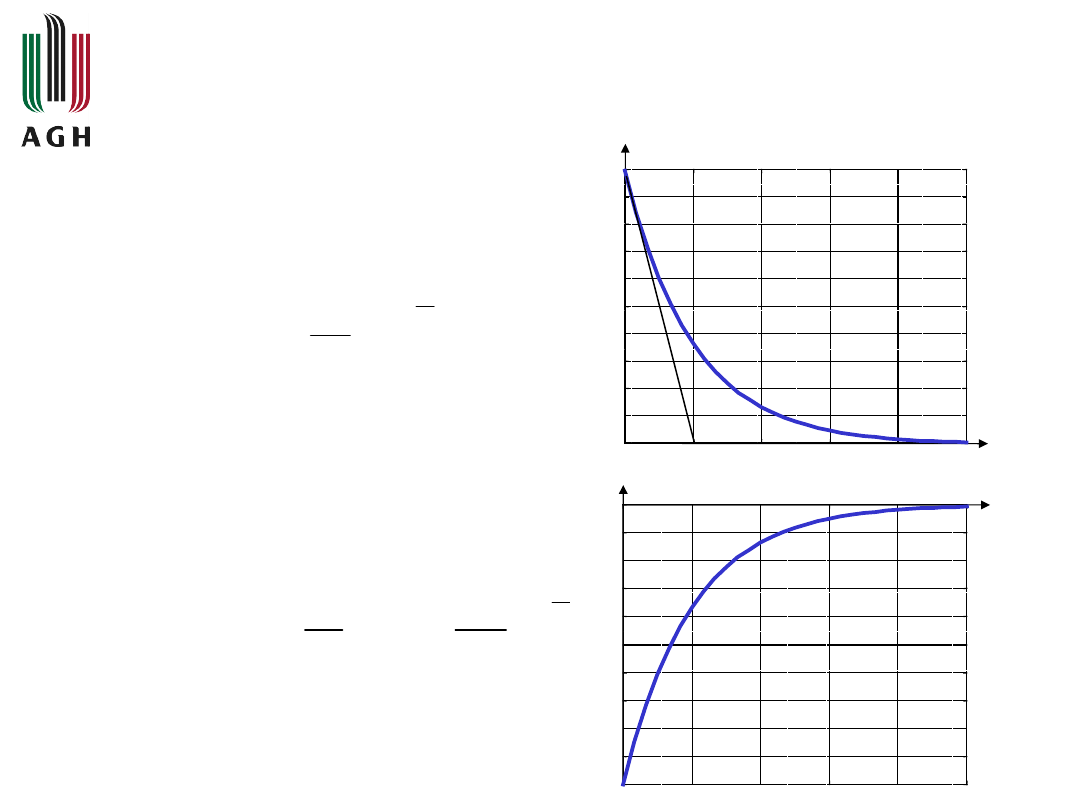
25
Odpowiedź skokowa
Odpowiedź impulsowa
Charakterystyki czasowe elementów
różniczkujących
rzeczywistych
t
T
e
T
K
t
h
t
y
1
)
(
)
(
t
T
e
T
K
t
T
K
t
g
t
y
1
2
)
(
)
(
)
(
t
-K/T
2
g(t)
T
t
K/T
h(t)
26
k
A
R
K
T
dt
t
dx
K
t
y
dt
t
dy
T
H
2
:
gdzie
)
(
)
(
)
(
Przykłady elementów różniczkujących rzeczywistych
Tłumik
hydrauliczny
Układ RC
u
x
u
y
C
R
RC
K
T
dt
t
du
K
t
u
dt
t
du
T
x
y
y
:
gdzie
)
(
)
(
)
(
k
E
y
x
R
H
A

27
Element oscylacyjny (drugiego rzędu)
Postać równania
różniczkowego
K - wsp.
wzmocnienia
T - stała czasowa
- wsp. tłumienia
)
(
)
(
)
(
2
)
(
2
2
2
t
x
K
t
y
dt
t
dy
T
dt
t
y
d
T
Warunek powstawania drgań
1
2
)
(
)
(
)
(
2
2
Ts
s
T
K
s
X
s
Y
s
G
Transmitancja operatorowa
1
0
Drgania
tłumione
czyli
0
4
4
2
2
2
T
T
1
1
28
Odpowiedź skokowa
t
T
e
K
t
h
t
y
T
t
2
2
1
sin
1
1
1
)
(
)
(
Charakterystyki czasowe elementów oscylacyjnych 2-go rzędu
Wartości współczynnika tłumienia decydują o
rodzaju drgań
•
dla drgania nietłumione
0
•
dla drgania tłumione
1
0
•
dla odpowiedź aperiodyczna,
nieoscylacyjna
1
Odpowiedź
impulsowa
T
t
e
T
t
g
t
y
T
t
2
1
sin
1
1
)
(
)
(
2
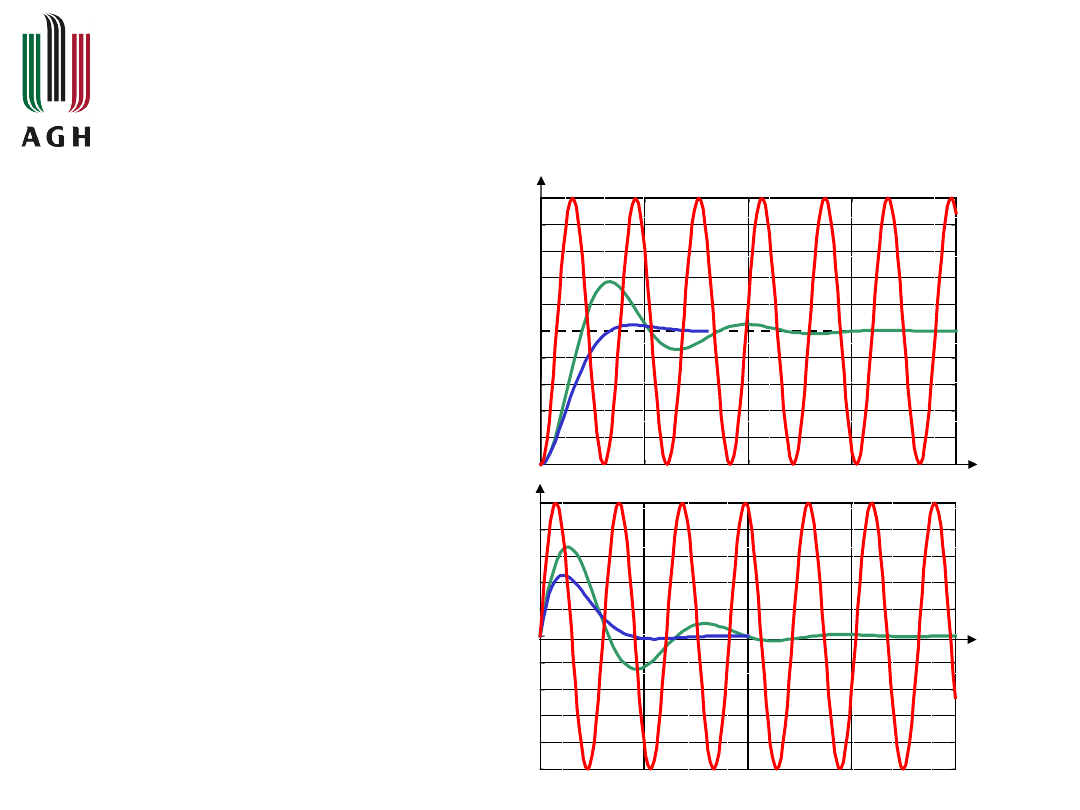
29
Charakterystyki czasowe elementów
oscylacyjnych 2-go rzędu
Odpowiedź
skokowa
Odpowiedź
impulsowa
t
K
h(t)
ksi=0.3
ksi=0.7
ksi=0
t
0
g(t)
ksi=0.3
ksi=0.7
ksi=0
30
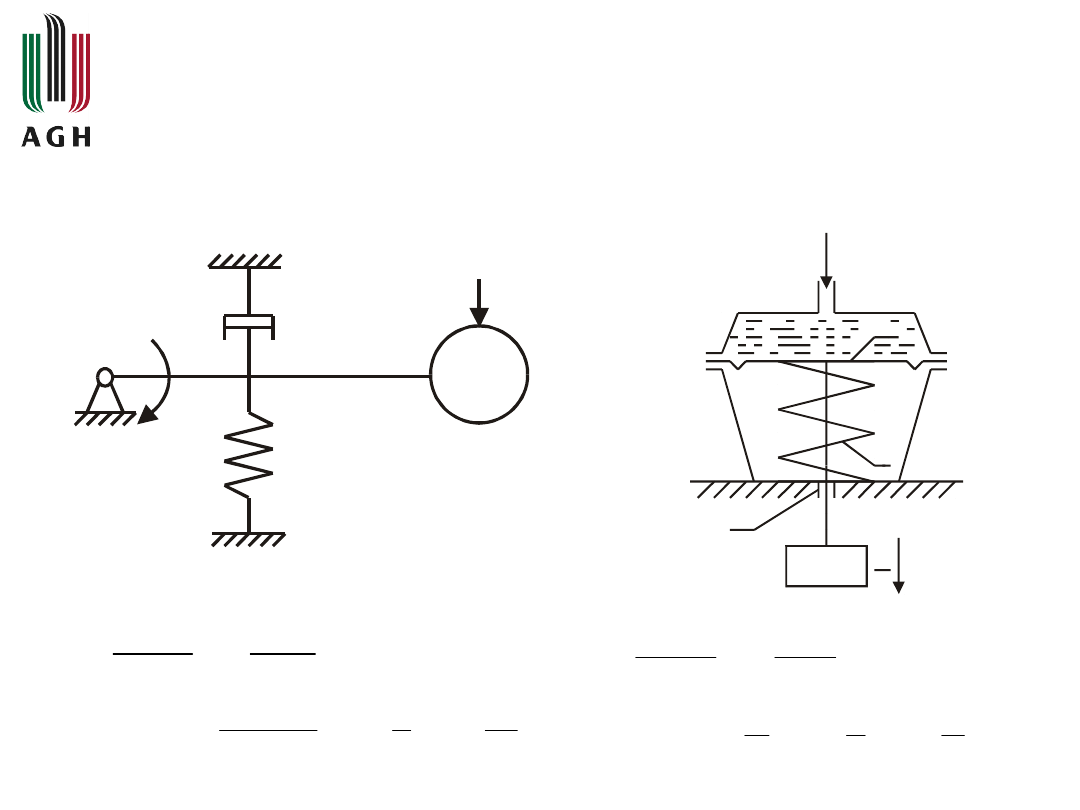
Przykłady elementów oscylacyjnych drugiego rzędu
masa-tłumik-sprężyna
siłownik pneumatyczny
ak
K
k
c
T
ak
b
a
m
T
t
F
K
t
dt
t
d
T
dt
t
d
T
1
,
,
:
gdzie
)
(
)
(
)
(
)
(
1
2
1
2
2
2
k
A
K
k
c
T
k
m
T
t
K
t
y
dt
t
dy
T
dt
t
y
d
T
,
,
:
gdzie
)
(
p
)
(
)
(
)
(
1
2
1
2
2
2
a
b
k
m
c
F(t)
p
A
k
m
c
y
31
Przykłady elementów oscylacyjnych drugiego rzędu
układ RLC
układ zbiornika z
cieczą
1
,
,
:
gdzie
)
(
)
(
)
(
)
(
1
2
1
2
2
2
K
RC
T
LC
T
t
u
K
t
u
dt
t
du
T
dt
t
u
d
T
x
y
y
y
2
1
2
1
2
2
1
2
2
2
,
,
:
gdzie
)
(
p
)
(
)
(
)
(
A
A
K
A
R
T
A
m
T
t
K
t
h
dt
t
dh
T
dt
t
h
d
T
H
u
x
R
i
L
C
u
y
p=
x
A
1
h=
y
A
2
R
H
32
Element inercyjny drugiego
rzędu
Postać równania
różniczkowego
)
(
)
(
)
(
)
(
1
2
2
2
2
t
x
K
t
y
dt
t
dy
T
dt
t
y
d
T
2
1
2T
T
Transmitancja operatorowa
s
T
T
T
KT
s
T
T
T
KT
s
G
s
G
s
G
4
4
3
4
3
4
3
3
2
1
1
1
)
(
)
(
)
(
1
)
(
)
(
)
(
1
2
2
s
T
s
T
K
s
X
s
Y
s
G
1
1
)
(
4
3
s
T
s
T
K
s
G
lub
lub w wyniku rozkładu równania na
ułamki proste
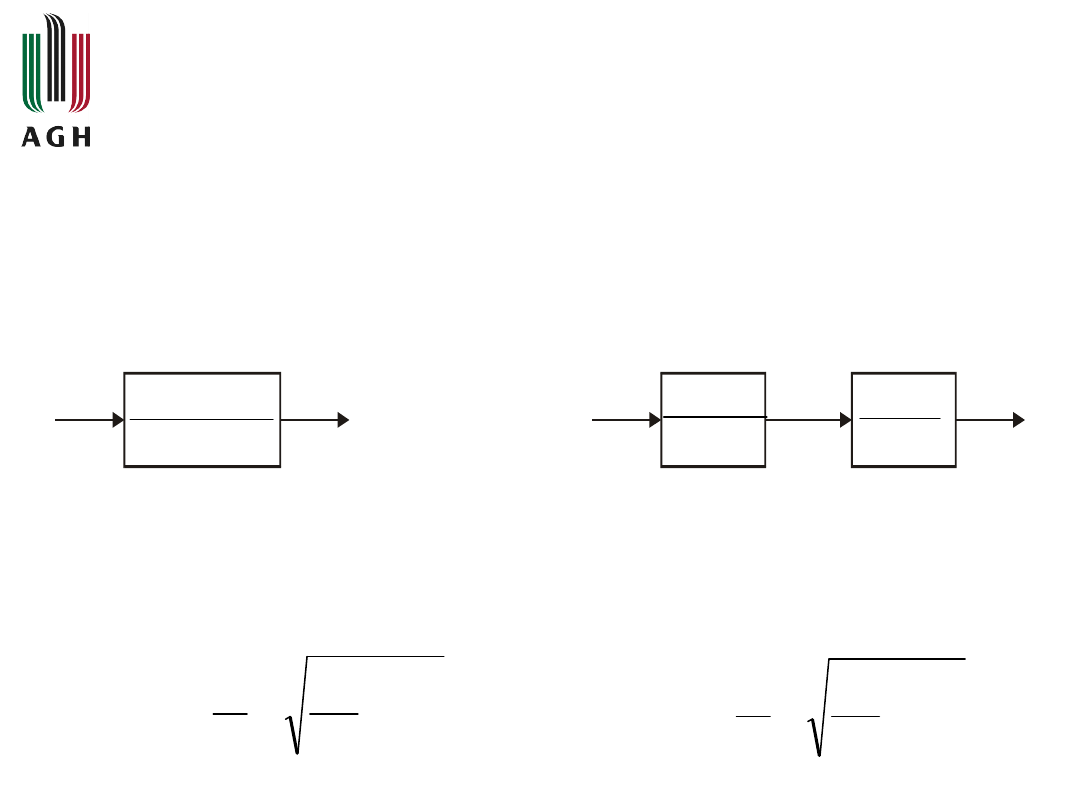
33
Element
inercyjny
drugiego
rzędu
można
przedstawić w postaci szeregowego połączenia
dwóch elementów inercyjnych pierwszego rzędu
1
1
2
2
2
s
T
s
T
K
1
3
s
T
K
1
1
4
s
T
=>
wynoszą
odpowiednio
4
3
i T
T
2
2
2
1
1
3
4
2
T
T
T
T
2
2
2
1
1
4
4
2
T
T
T
T
ora
z
Element inercyjny drugiego rzędu

34
Odpowiedź skokowa
Odpowiedź
impulsowa
)
(
)
(
)
(
4
3
4
3
T
t
T
t
e
e
T
T
K
t
g
t
y
4
3
4
3
4
3
1
1
)
(
)
(
T
t
T
t
e
T
e
T
T
T
K
t
h
t
y
Element inercyjny drugiego
rzędu
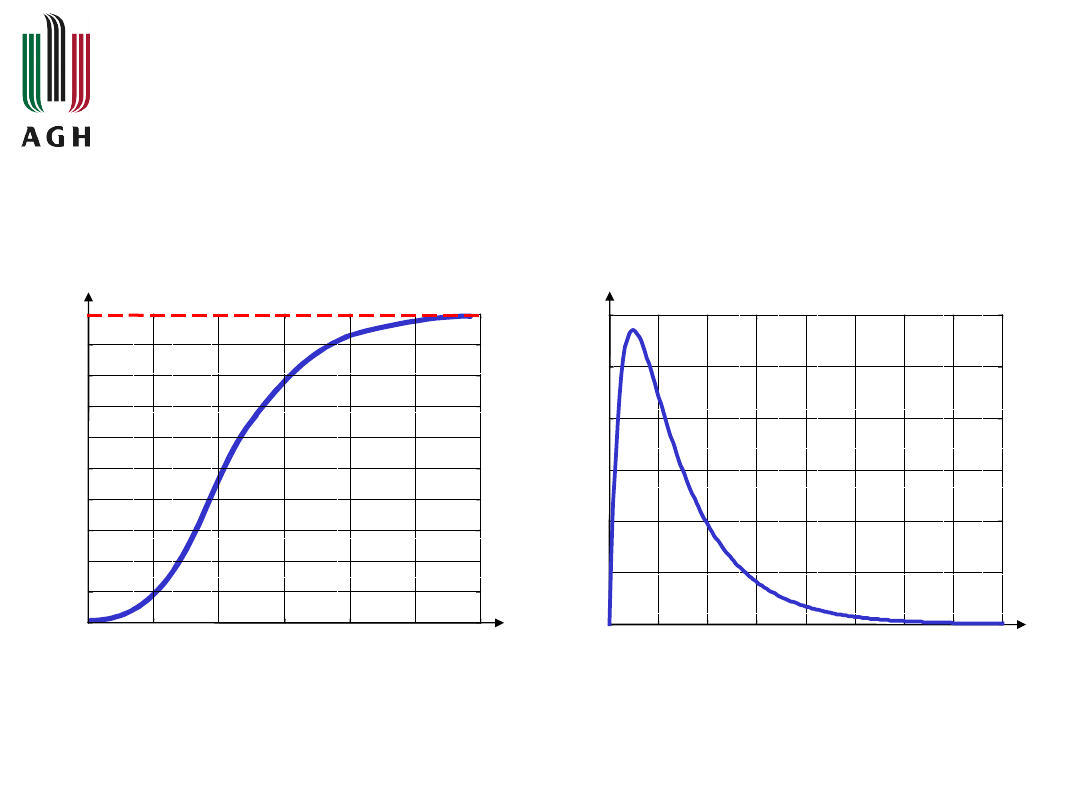
35
Odpowiedzi czasowe elementów inercyjnych drugiego rzędu
Odpowiedź skokowa
Odpowiedź
impulsowa
t
g(t)
t
K
h(t)
36
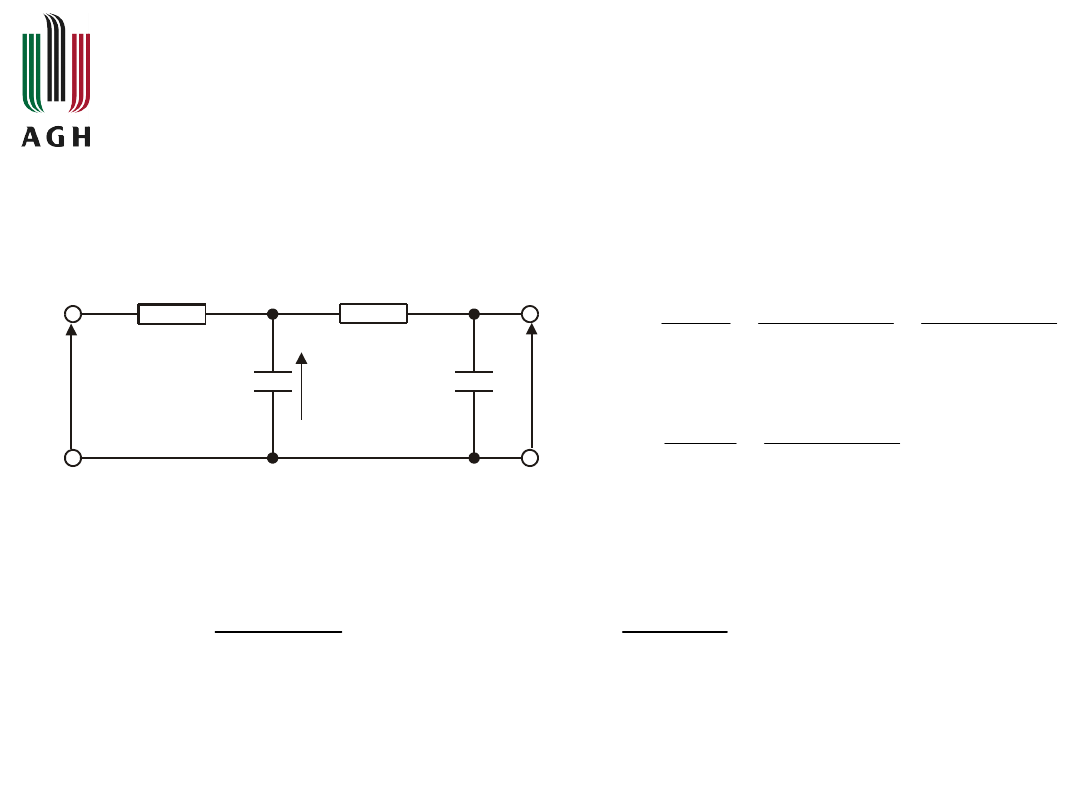
Przykład elementu inercyjnego drugiego rzędu
Podwójny czwórnik RC
2
2
1
2
2
2
2
1
1
1
0
1
1
)
(
)
(
)
(
)
(
)
(
)
(
)
(
)
(
R
t
u
t
u
dt
t
du
C
R
t
u
t
u
R
t
u
t
u
dt
t
du
C
)
(
)
(
)
(
)
(
)
(
0
2
2
21
2
1
2
2
2
2
1
t
u
t
u
dt
t
du
T
T
T
dt
t
u
d
T
T
Po
przekształceniach
2
1
12
2
2
2
1
1
1
,
,
C
R
T
C
R
T
C
R
T
gdzi
e:
R
1
R
2
C
1
u
0
u
1
u
2
C
2

37
Element opóźniający
Postać równania
różniczkowego
Transmitancja operatorowa
Odpowiedź skokowa
Odpowiedź
impulsowa
)
(
)
(
t
x
K
t
y
s
e
K
s
G
)
(
)
(
1
)
(
)
(
t
K
t
h
t
y
)
(
)
(
)
(
t
K
t
g
t
y
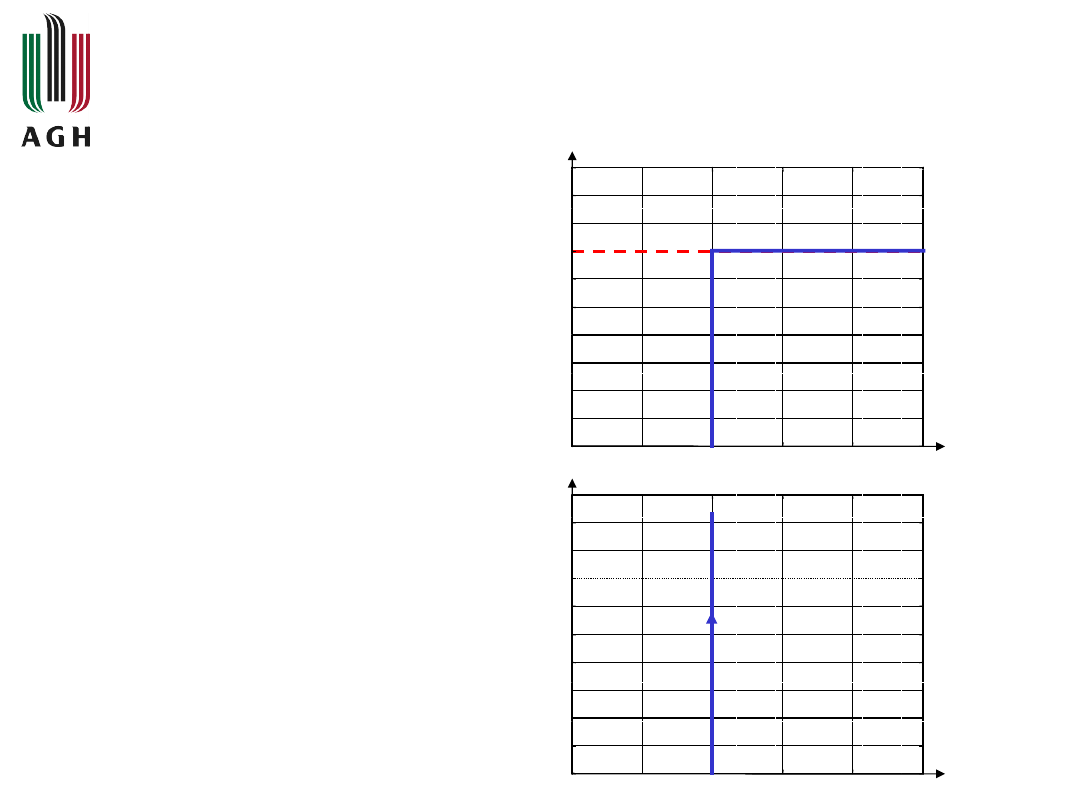
38
Odpowiedź skokowa
Odpowiedź
impulsowa
Odpowiedzi czasowe elementów opóźniających
t
K
h(t)
t
g(t)
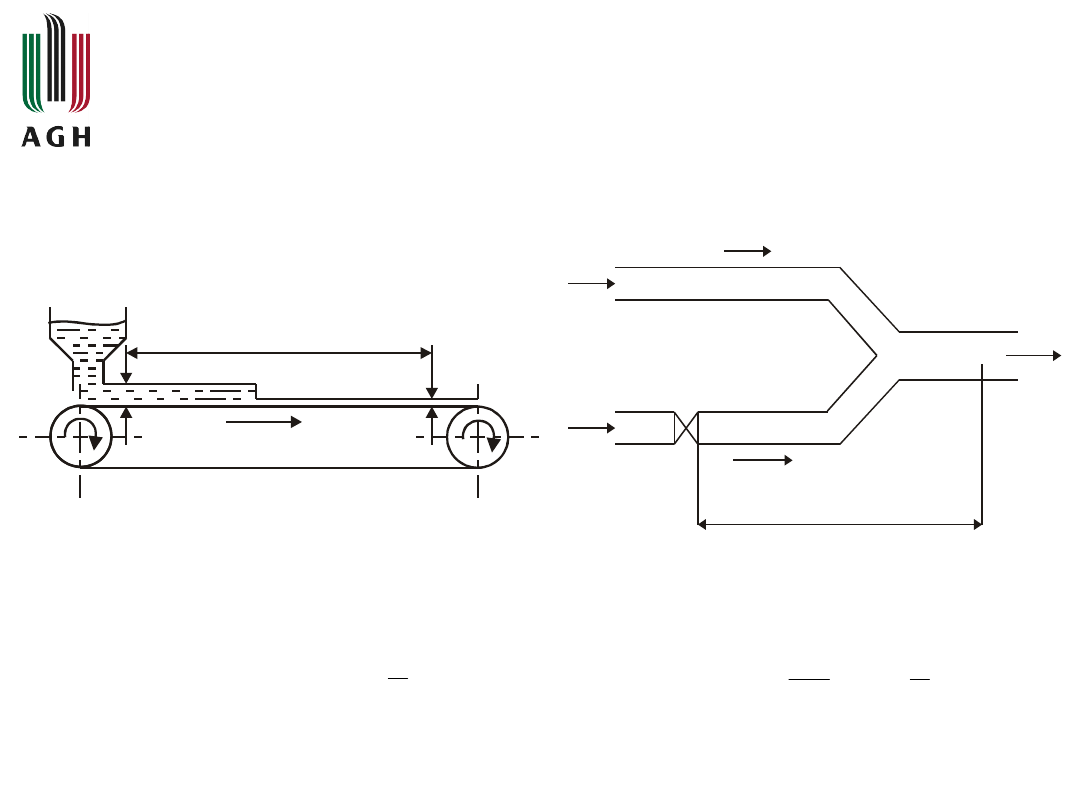
39
Przykłady elementów opóźniających
odcinek
rurociągu
transporter
v
l
K
t
x
K
t
y
,
1
:
gdzie
)
(
)
(
v
l
Q
K
t
Q
K
t
y
,
1
:
gdzie
)
(
)
(
1
2
x
v
l
y
v
v
l
a
Q
1
Q
2
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
Wyszukiwarka
Podobne podstrony:
wyklad 5 PWSZ
Wykład 1 PWSZ
zarzadzanie logistyka - wyklady, PWSZ
PSYCHOLOGIA KLINICZNA-dr Molicka - wykłady - PWSZ Leszno, pedagogika społeczna
wyklad 2 PWSZ
wyklad 5 PWSZ
TEMAT 10 GLOBALIZACJA, + DOKUMENTY, Politologia 1 pwsz wykaz zajec, Nauka o polityce wykłady
TEMAT 5 Wladza i jej legitymizacja, + DOKUMENTY, Politologia 1 pwsz wykaz zajec, Nauka o polityce wy
higiena 02.03.2007, HIGIENA - WYKłADY NA PWSZ
Egzamin Stal 2011, Szkoła, PWSZ, semestr VI, stal, wykład
MRPMPS Word, PWSZ, SEMESTR 5, LP RUDNICKI WYKŁAD
OCHRONA SRODOWISKA-wyklady do egzaminusciaga cała sciaga, Pwsz Kalisz
Temat 3 Polityka i proces polityczny, + DOKUMENTY, Politologia 1 pwsz wykaz zajec, Nauka o polityce
TEMAT 4 DETERMINANTY POLITYKI, + DOKUMENTY, Politologia 1 pwsz wykaz zajec, Nauka o polityce wykłady
MRP zadanie II zpolska wersja, PWSZ, SEMESTR 5, LP RUDNICKI WYKŁAD
Egzamin Stal 2011[1]odZdzicha, Szkoła, PWSZ, semestr VI, stal, wykład
więcej podobnych podstron