
Ruch naładowanych cząstek
w polu elektrycznym
i
magnetycznym
Marian Cholewa
Katedra Fizyki
Politechniki Rzeszowskiej
Mechanika
Ch. Kittel, D. Knight, M.A.
Ruderman
PWN, Warszawa, Rozdz. 4
2
2
d (t)
q
.
dt
M
=
r
a=
E
r
r
r
Naładowana cząstka w
jednorodnym polu
elektrycznym
Niech cząstka o masie M, ładunku q i wektorze
wodzącym znajduje się w jednorodnym polu
elektrycznym o wektorze natężenia pola elektrycznego
. Równanie Newtona wiążące przyspieszenie cząstki
z siłą ma postać
E
r
r
r
a
r
Zadanie polega na znalezieniu zależności wektora
od czasu. Ponieważ mamy do czynienia z
równaniem różniczkowym zwyczajnym drugiego
rzędu należy zadać dwa warunki początkowe
określające położenie początkowe i prędkość
początkową:
(t)
r
r
0
0
(t =0) = ; (t =0) =
.
r
r v
v
r
r r
r
Rozwiązanie równania
Newtona:
2
0
0
q
(t)
t + t
.
2M
=
+
E
r
v
r
r
r
r
r
Spełnia ono warunki początkowe:
0
0
0
t=0
t=0
d (t)
q
(t =0)
;
t
.
dt
M
�
�
=
=
+
=
�
�
�
�
r
E
r
r
v
v
r
r
r
r
r
r
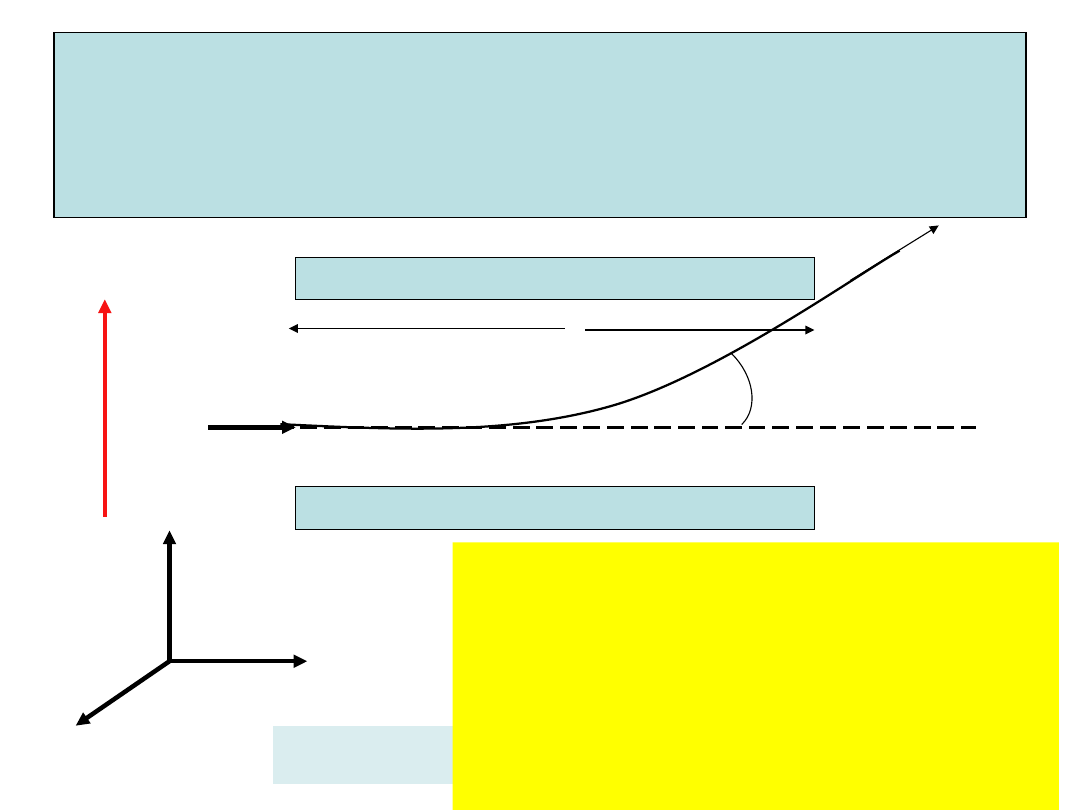
Ruch naładowanej cząstki
między
okładkami kondensatora
(0,0,E) = E, =(0,v,0) = v
E =
k v
j
r
r
r
r
Cząstka porusza się wzdłuż osi
y ruchem jednostajnym z
prędkością
i ruchem jednostajnie
przyśpieszonym wzdłuż osi z.
Dlatego:
- - - - - - - - - - - - - - - - - - - - - - - - - - - - - - -
+++++++++++++++++++++++++++++++++
0
v
r
x
y
z
E
L
0
v
r
Ruch naładowanej cząstki
między
okładkami kondensatora
2
0
0
q
(t)
t
t
,
2M
=
+
+
E
r
v
r
r
r
r
r
2
0
z
0
0
y
0
0
qE
qE
z(t) =
t +z ; v (t) =
t;
2M
M
dy(t)
y(t) =v t+y ; v (t) =
v ; x(t) =x .
dt
=
Rozwiązanie równania
ruchu:
Składowe rozwiązania równania ruchu:
Czas przelotu cząstki przez obszar
kondensatora:
L
0
T =L/v .
Warunki początkowe
Ponieważ początek układu współrzędnych możemy
umieścić w dowolnym punkcie przestrzeni, więc
przyjmijmy, że
0
0
0
x =0,y =0,z =0.
Wtedy rozwiązanie równania ruchu przyjmie postać:
2
z
0
y
0
qE
qE
z(t) =
t ; v (t) =
t;
2M
M
dy(t)
y(t) =v t; v (t) =
v ; x(t) =0.
dt
=
0
albo (t =0)
0.
= =
r
r
r
r
Prędkość w kierunku osi z
po wyjściu z kondensatora
(L)
z
z
L
L
0
qE
qE L
v =v (t =T ) =
T
.
M
M v
=
Aby znaleźć składową z prędkości cząstki po
wyjściu z kon-densatora, we wzorze
należy przyjąć t=T
L
=L/v
0
z
qE
v (t) =
t
M
Kąt pod jakim skierowany jest wektor prędkości
cząstki po wyjściu z kondensatora:
(L)
z
0
2
0
qE L
tgθ =v /v
.
M v
=
Gdy kąt jest mały, to tg, wtedy
2
0
qE L
θ
.
M v
;
v
0
(L)
z
v
L
(t =T )
v
r
Użyteczne wzory
( )
( )
( )
( )
( )
( )
( )
( )
( )
2
2
2
2
dsinx
dcosx
=cosx;
=-sinx ;
dx
dx
d sinx dcosx
d cosx
dsinx
=
- sinx;
=-
=-cosx ,
dx
dx
dx
dx
dsinαx
dsin αx d αx
=
=αcosx;
dx
dαx
dx
dcosαx
dcos αx d αx
=
=-αsin αx .
dx
dαx
dx
2
2
2
2
2
2
d cosωt
d sinωt
=- ω cosωt,
=- ω sinωt
dt
dt
Cząstka naładowana w
zmiennym polu elektrycznym
Niech zmienne, harmoniczne pole elektryczne będzie
skierowane wzdłuż osi x:
( )
(0)
x
x
(t)
E (t) = E sinωt .
=
E
i
i
r
r
r
Równanie ruchu:
( )
2
(0)
x
x
2
d x(t)
q
q
=
E (t) =
E sinωt .
dt
M
M
Poszukamy rozwiązania w
postaci:
1
0
0
x(t) =x sinωt+v t+x .
Jego druga pochodna wyraża się przez sin(t):
2
2
1
2
d x(t)
=-ω x sinωt.
dt
Powiązanie x
1
z parametrami zadania
Porównanie równania ruchu:
( )
2
(0)
x
x
2
d x(t)
q
q
=
E (t) =
E sinωt
dt
M
M
pozwala wyrazić x
1
występujące w rozwiązaniu przez
q, M, i natężenie pola elektrycznego
(0)
2
(0)
x
1
x
1
2
qE
q
-ω x sinωt =
E sinωt
x =-
.
M
Mω
�
Wymiar fizyczny x
1
:
[ ]
(0)
2
x
1
2
2
2
qE
F
mL/T
x = -
=
=L ,
Mω
Mω
m/T
(m ma wymiar masy, L - dlugosci, T- czasu)
�
� �
�
=
�
� �
�
�
�
�
�
Prędkość ruchu cząstki
1
0
0
(0)
x
0
0
2
x(t) =x sinωt+v t+x ,
qE
x(t) =-
sinωt+v t+x .
Mω
�
Wstawiamy do
rozwiązania x(t):
Obliczymy prędkość ruchu cząstki
(0)
x
x
0
qE
dx(t)
v (t) =
=-
cosωt+v .
dt
Mω
(
)
(0)
2
1
x
x =-qE / Mω
Związek pomiędzy częstością i
parametrami zagadnienia
(0)
(0)
x
x
x
0
0
t=0
qE
qE
dx(t)
v (t =0) =
=-
cos0+v
-
v .
dt
Mω
Mω
=
+
Znajdziemy prędkość cząstki w momencie czasu t=0
Jeżeli zadamy v
x
(t=0), to zwiążemy v
0
z parametrami
zagadnienia. Np. gdy v
x
(t=0)=0, to
(0)
(0)
x
x
0
0
qE
qE
-
v
0
v =
.
Mω
Mω
+ = �
Wymiar fizyczny v
0
:
(0)
2
x
0
qE
F
mL/T
L
=
[v ].
Mω
Mω
m/T
T
�
� � �
=
=
=
�
� � �
� �
�
�
Naładowana cząstka w
zmiennym polu elektrycznym:
ostateczny wynik
(0)
(0)
x
x
0
2
qE
qE
x(t) =-
sinωt+
t+x .
Mω
Mω
Nawet jeżeli początkowa prędkość v
x
(0)=0, to
naładowana cząstka w zmiennym, oscylującym polu
elektrycznym wykonuje ruch drgający wzdłuż osi x i
jednocześnie porusza się ruchem postępowym z
prędkością
(0)
(p)
x
x
qE
v
0.
Mω
=
�
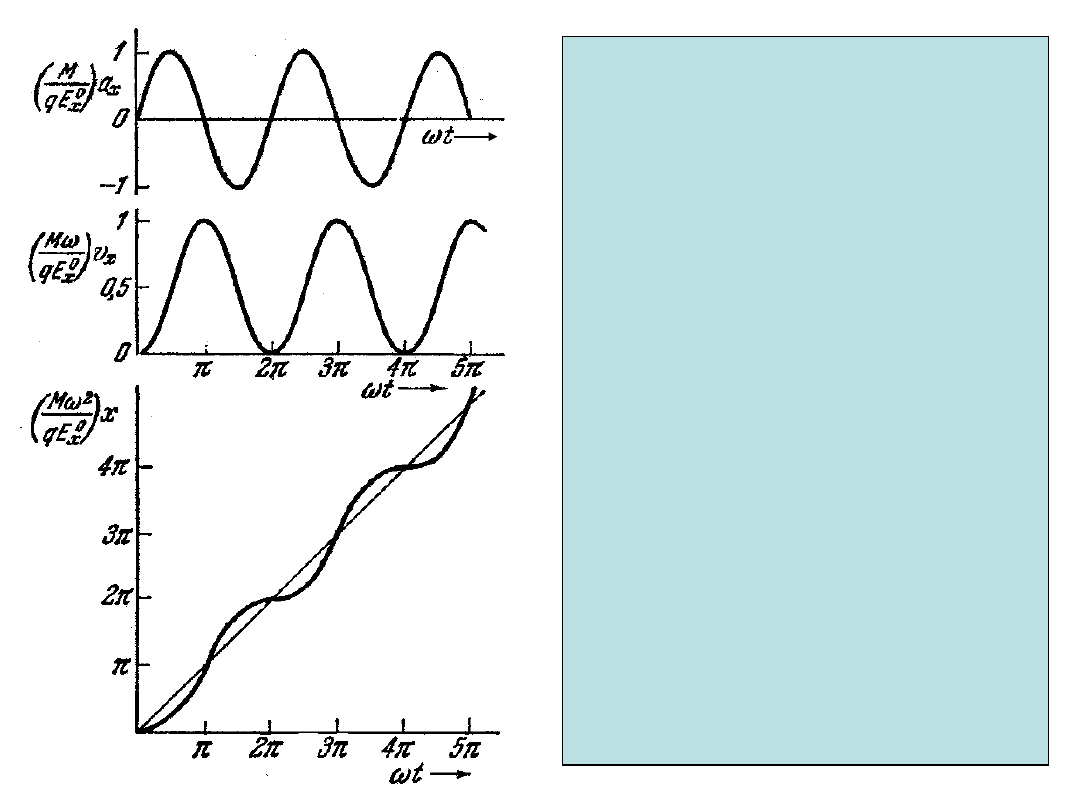
Ładunek
znajduje się w
oscylującym
polu
elektrycznym:
przyśpieszenie,
prędkość,
położenie.
przyspieszenie
prędkość
położenie
Ruch cząstki naładowanej
w stałym polu
magnetycznym
Niech cząstka ma masę M i ładunek q znajduje się w
polu magnetycznym o wektorze indukcji . Równanie
ruchu ma postać:
B
r
2
2
d (t)
d
M
M
=q
dt
dt
�
r
v
v×B .
r
r
r
Niech wektor indukcji będzie skierowany wzdłuż osi z:
, wtedy
B =kB
r
r
(
)
(
)
(
)
y
z
z
y
y
z
x
x
z
x
x
y
y
x
=v B - v B
v B ;
=v B - v B
-v B;
=v B - v B
0.
x
y
z
=
=
=
v B
v B
v B
r
r
r
r
r
r
�
�
�
Równania dla składowych
y
x
y
x
z
z
dv
dv
q
q
=
v B ;
=- v B ;
dt
M
dt
M
dv
0
v
.
dz
const
= �
=
Twierdzenie: Energia kinetyczna K nie zmienia się z upływem czasu, tj.
jest całką ruchu: K(t)=Mv
2
(t)/2=const. Dowód:
[
]
(
)
(
)
2
d
M dv (t) M d
M d (t)
d (t)
K(t) =
(t) (t)
(t)+ (t)
dt
2 dt
2 dt
2
dt
dt
d (t)
M (t)
qM (t)
(t)
(t)
0.
dt
�
�
�
�
�
�
=
=
=
�
�
�
�
�
�
�
�
�
�
�
=
=
�
= �
=
v
v
v v
v
v
v
v
v
v ×B
B v(t)×v
r
r
r r
r
r
r
r
r
r
r
r
r
r
Wektor jest prostopadły do wektora ,
więc ich iloczyn skalarny znika!
(
)
(t)
v ×B
r
r
(t)
v
r
Rozwiązanie pary równań
różniczkowych – postać rozwiązań
Będziemy szukali rozwiązania układu
równań
y
x
y
x
dv
dv
q
q
=
v B ,
=- v B ,
dt
M
dt
M
w
postaci:
( )
( )
x
1
x
1
v =v sinωt ,v =v cos ωt .
Znajdziemy pochodne znalezionych rozwiązań dwóch równań
różniczkowych:
( )
( )
y
x
1
1
dv (t)
dv (t)
=ωv cos ωt ,
=- ωv sin ωt .
dt
dt
Rozwiązanie
pary równań różniczkowych
( )
( )
y
x
1
1
dv (t)
dv (t)
Wstawimy
=ωv cos ωt ,
=- ωv sin ωt .
dt
dt
do równań:
y
x
y
x
dv
dv
q
q
=
v B ,
=- v B . Oto wynik:
dt
M
dt
M
1
1
1
1
c
qB
qB
qB
ωv cosωt =
v cosωt , - ωv sinωt =-
v sinωt ω ω =
.
M
M
M
Częstość kołowa
c
nazywa się częstością
cyklotronową.
Nie zależy ona od prędkości v
1
.
c
ω =qB/M, zależy jedynie od indukcji pola
magnetycznego B
i charakterystyk cząstek.
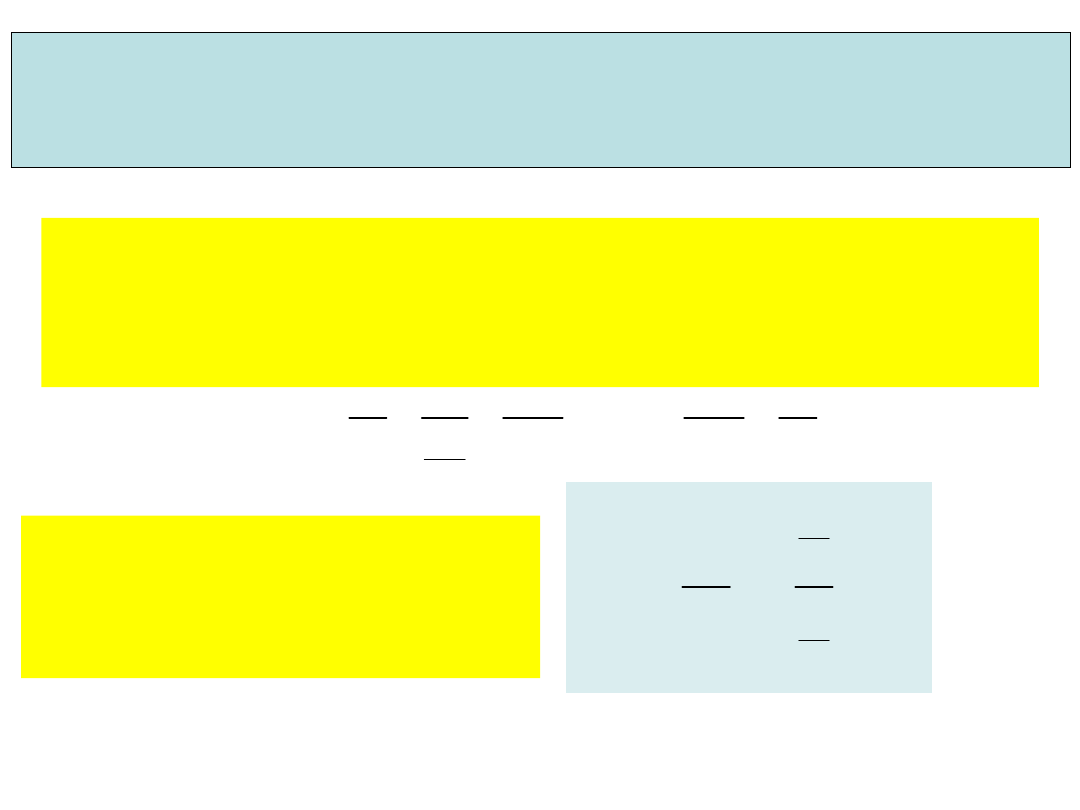
Trajektoria ruchu naładowanej
cząstki w stałym polu
magnetycznym
Znamy składowe wektora prędkości v(t):
( )
( )
( )
( )
x
1
x
1
1
1
v =v sinωt ,v =v cos ωt
dx(t)
dy(t)
=v sinωt ;
=v cos ωt ,
dt
dt
�
Należy znaleźć składowe x(t) i y(t) wektora wodzącego cząstki
(t) .
r
r
Oto one:
(
)
(
)
(
)
(
)
1
0
c
0
c
c
1
0
c
0
c
c
0
z
v
x(t) =x -
cosω t =x -ρcos ω t ;
ω
v
y(t) =y +
sinω t =y +ρsin ω t ;
ω
z(t) =z +v t .
Sens rozwiązania
(
)
(
)
(
)
(
)
1
0
c
0
c
c
1
0
c
0
c
0
z
c
v
x(t) =x -
cosω t =x - ρcos ω t ;
ω
v
y(t) =y +
sinω t =y +ρsin ω t ;z(t) =z +v t .
ω
W płaszczyźnie x, y ruch odbywa się po okręgu o
promieniu cyklotronowym =v
1
/
c
ze środkiem w
punkcie (x
0
,y
0
).
[
] [
]
(
)
(
)
2
2
2
2
2
2
1
0
0
c
c
c
v
x(t)- x
+ y(t)- y
=
cosω t +sin ω t =ρ .
ω
� �
�
�
� ��
�
� �
Wzdłuż osi z ruch jest jednostajny z prędkością v
z
.
Złożenie obydwu ruchów daje ruch po spirali.
Własności promienia
cyklotronowego
1
1
1
1
c
v
v
v M
v M p
.
qB
ω
qB
q
q
M
^
r =
=
=
� r B =
=
Wprowadzimy p
- składową pędu w
płaszczyźnie prostopadłej do kierunku
wektora indukcji magnetycznej, wtedy
Wymiar fizyczny
promienia
cyklotronowego :
[ ]
1
c
L
v
T
ρ =
= =L .
1
ω
T
� �
� �
� �
Trajektoria
ruchu
cząstki
w stałym
polu
magnetyczny
m
q
B
r
x
y
z
q
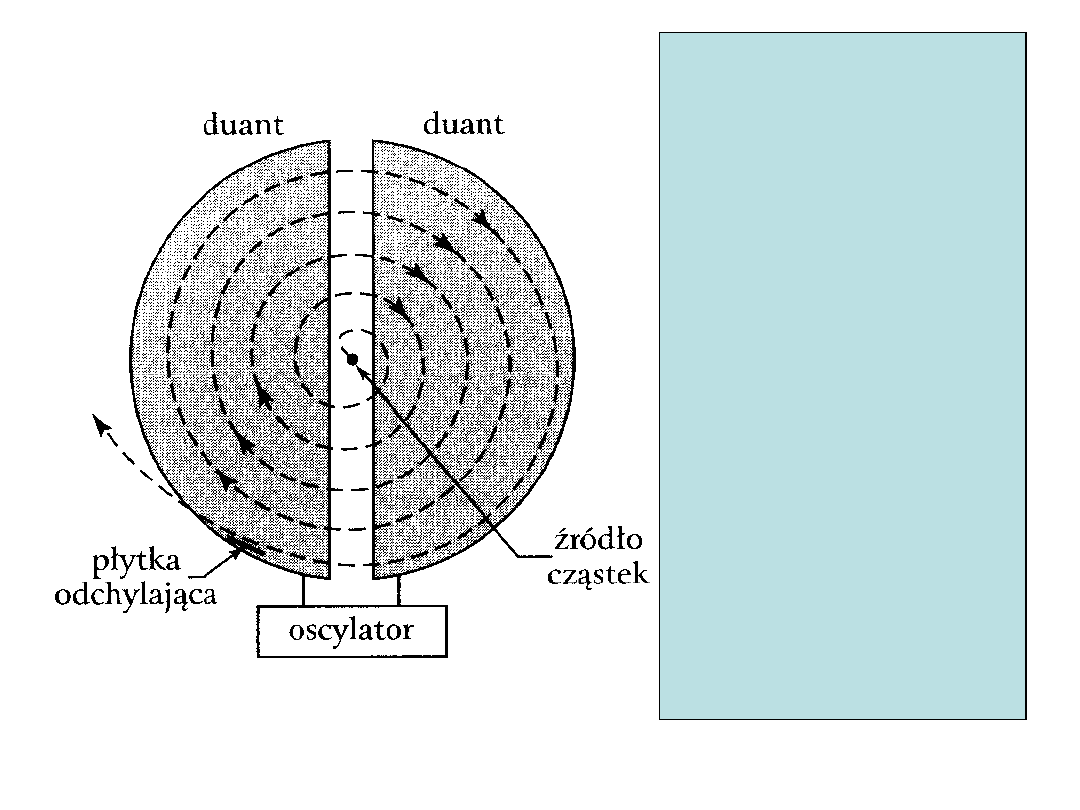
Zasada działania cyklotronu
W cyklotronie cząstki poruszają się po niemal
kołowych orbitach. Po każdej połowie obrotu cząstki
są przyspieszane w oscylującym polu elektrycznym.
Częstość drgań pola elektrycznego musi być równa
aktualnej wartości częstości cyklotronowej. Po
każdym obrocie cząstki przyśpieszają uzyskując
energię od pola elektrycznego. Należy dobrać tak
chwilowe pole elektryczne tak, aby harmoniczne pole
elektryczne przyśpieszało cząstki. Ponieważ
2
k
1
1
k
E =Mv /2
v = 2E /M ,
�
możemy wyrazić promień cyklotronowy
przez E
k
k
c
c
2E /M
v
ρ =
=
.
ω
ω
Po każdym cyklu promień cyklotronowy rośnie, natomiast częstość
kołowa jest stała.
Cyklotron
Lawrance
’a
1931 r.
Ernest Orlando Lawrence
1901-1958
nagroda Nobla w 1939 r.
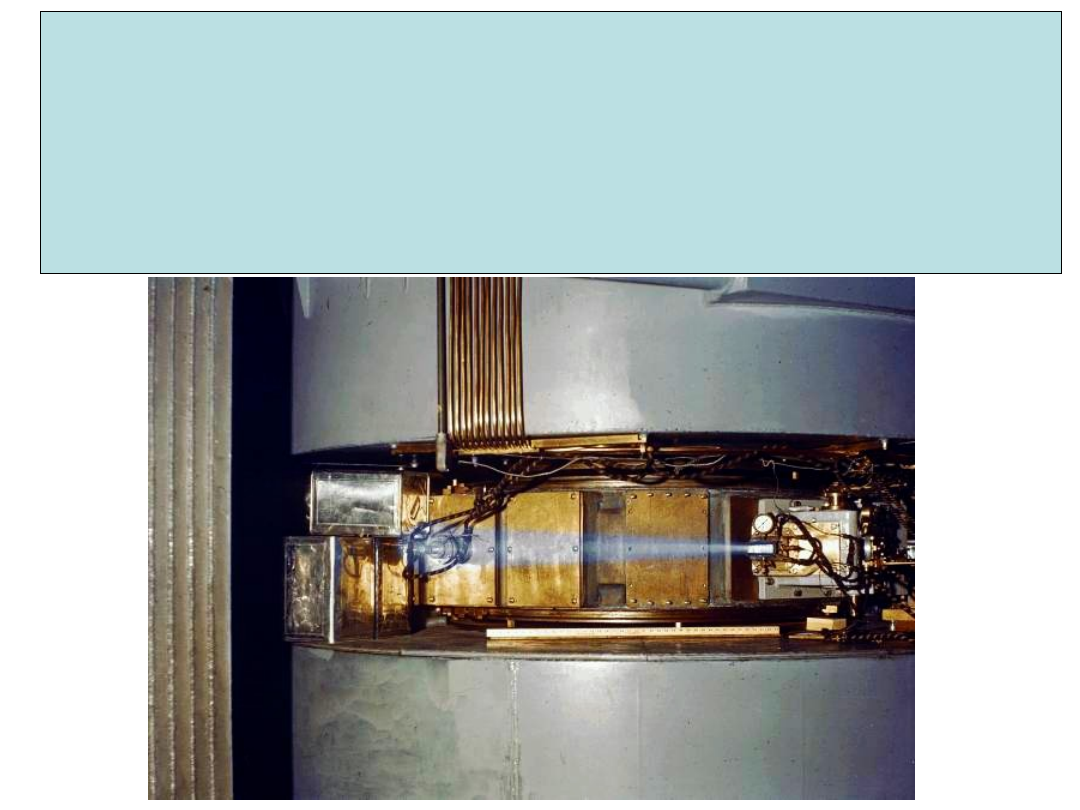
W 1939 r. z 60-calowego cyklotronu w Berkley
National Laboratory wyprowadzono wiązkę
przyśpie-szanych jonów (prawdopodobnie
protonów albo deuteronów). Jonizują one
otaczające powietrze powodując niebieską
poświatę.
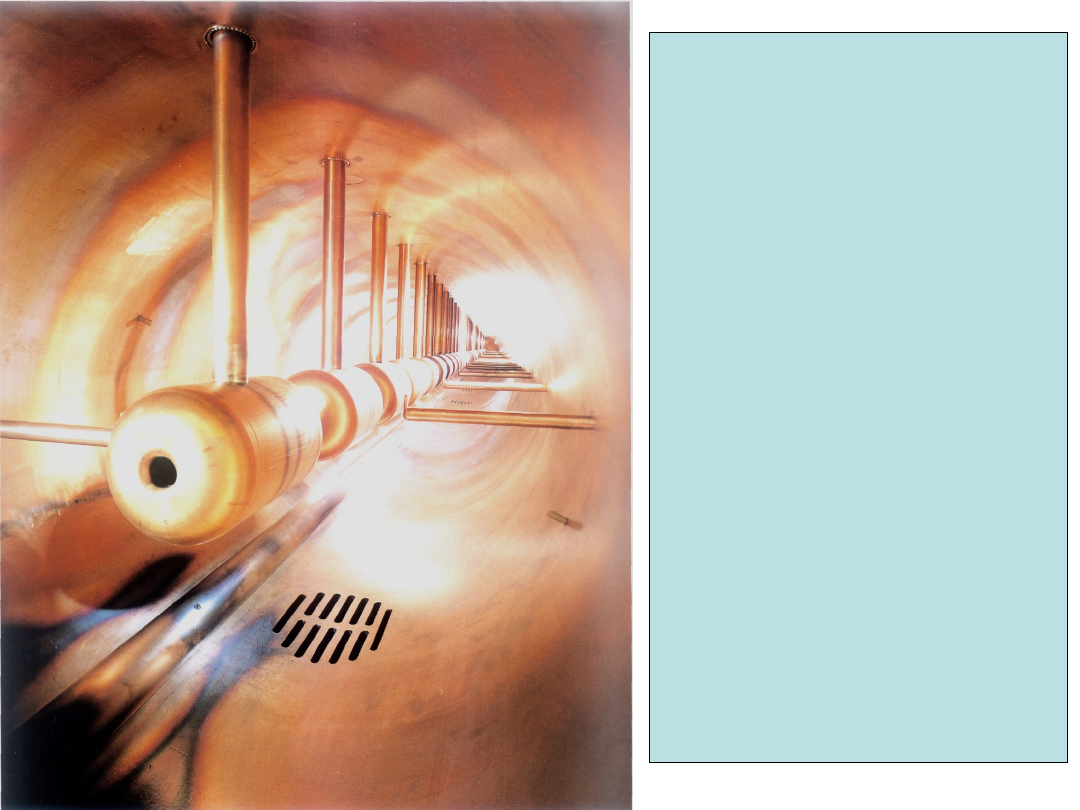
Tunel
akcelerator
a w
Fermilab
o średnicy
ok. 2 km
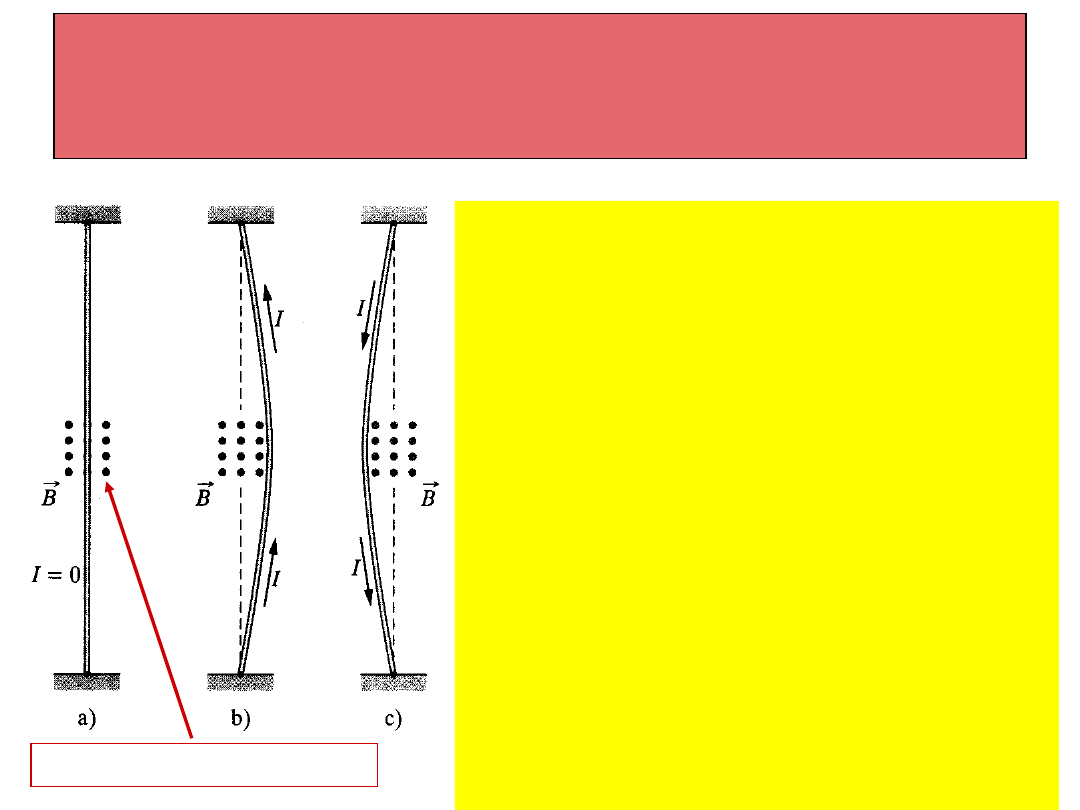
Siła działająca na giętki
przewodnik z prądem w polu
magnetycznym
Giętki przewodnik znajduje się
między biegunami magnesu.
Wektor indukcji magnetycznej jest
prostopadły do płaszczyzny
rysunku
a) Gdy w przewodniku nie płynie
prąd, na elektrony przewodnictwa
nie działa siła Lorentza.
b) Gdy w przewodniku płynie prąd o
natężeniu I to na elektrony, które
nie mogą opuścić przewodnik,
działa siła Lorentza. W wyniku
przewód wygina się.
c) Gdy zmienimy kierunek prądu, to
przewodnik wygnie się w stronę
przeciwną w porównaniu z
przypadkiem (b).
Dalszy biegun magnesu
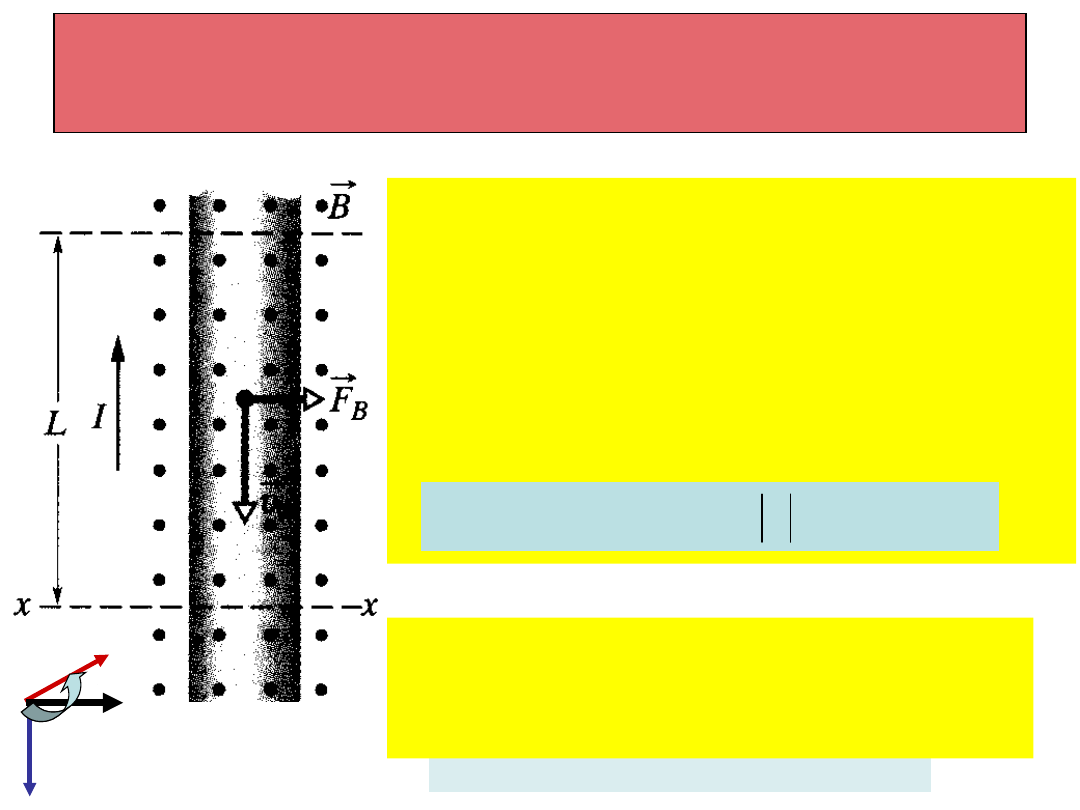
Co dzieje się z elektronami przewodu
w polu magnetycznym
Element liniowego przewodnika o długości
L. Niech prędkość unoszenia elektronów
wynosi v
d
. Wszystkie elektrony znajdujące
się w obszarze o długości L przejdą przez
płaszczyznę xx w ciągu interwału
czasowego t = L/v
d
. Ładunek
przepływający przez tę płaszczyznę w tym
interwale równy jest q = It = IL/v
d
. Ten
ładunek należy podstawić do równania
określającego wielkość siły Lorentza:
d
B
d
F = q v B sinθ.
B
q
=
�
� ��
F
v
B
r
r
r
×
o
B
d
d
I L
F =
v B sin90
I L B.
v
�
� ��
= ��
Siła działająca na odcinek przewodnika o
długości L, w
którym płynie prąd o natężeniu I, w polu
magnetycznym.
d
v
r
B
r
B
F
r
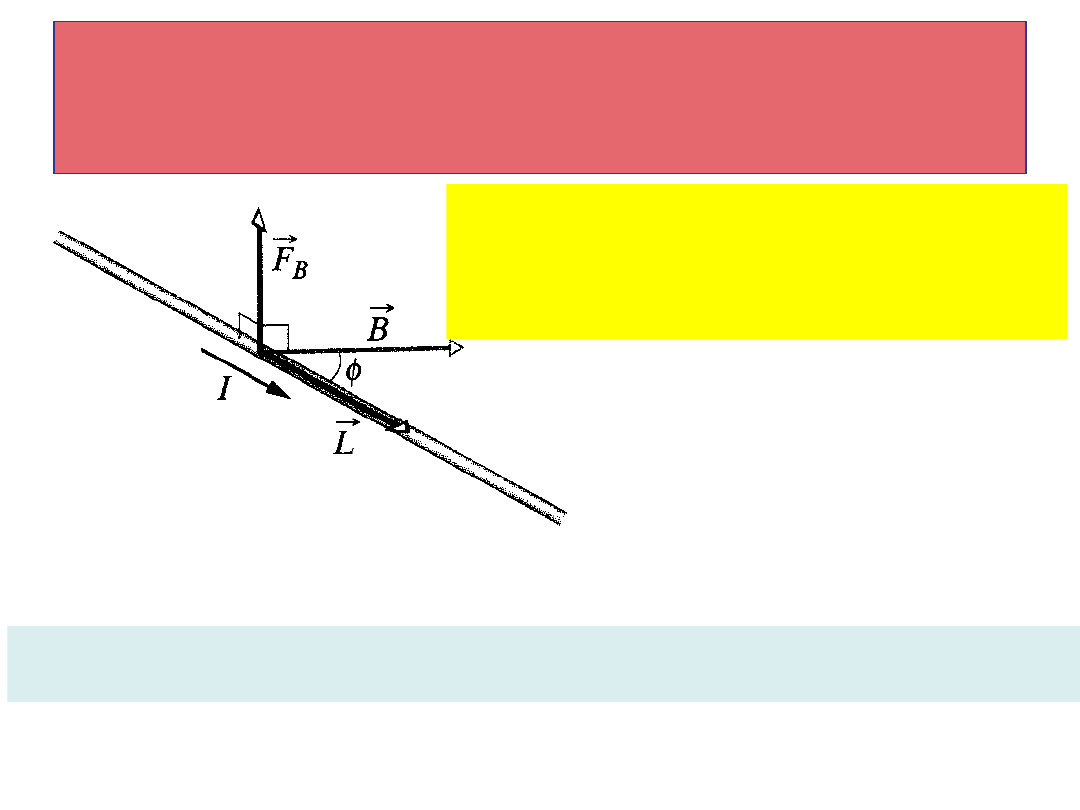
Gdy kierunek prądu nie jest
prostopadły do
B
r
Wprowadzimy wektorowy element
długości jego kierunek jest zgodny
z kierunkiem płynięcia prądu, a
wielkość równa długości dL .
dL
r
Siła, która działa ze strony pola
magnetycznego
na element przewodnika równa jest
=I
B
dF
dL×B .
r
r r
Ten wzór pozwala znaleźć siłę działającą na przewodnik o dowolnym kształcie.
Trzeba znaleźć całkę, która jest wektorowa sumą.
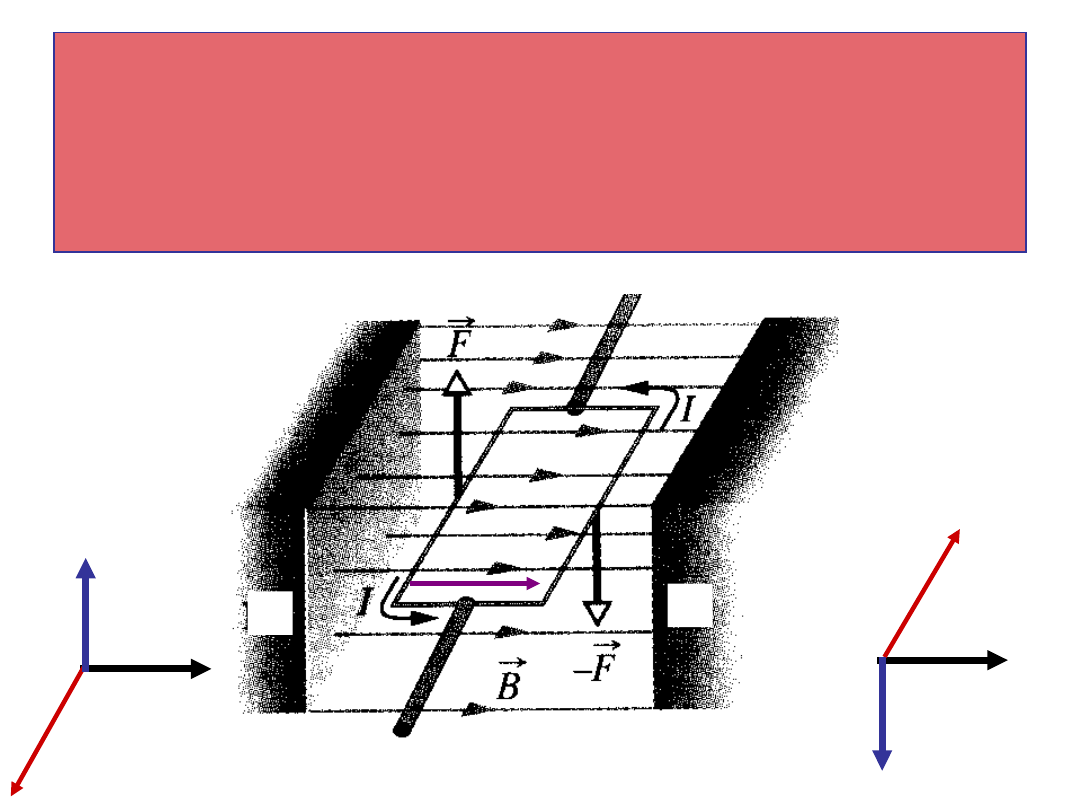
Para sił działająca na ramkę z
prądem w stałym polu
magnetycznym
B
r
L
r
B
-F
r
N
S
B
r
-L
r
B
F
r
1
L
r
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
Wyszukiwarka
Podobne podstrony:
4 Ruch naładowanych cząstek w polu magnetycznym
12 Ruch naładowanej cząstki w polu elektrycznym
12 Ruch cząstki naladowanej w polu elektrycznym 13 Ruch naładowanej cząstki w polu magnetycznym
Ruch cząstki naładowanej w jednorodnym polu elektrostatycznym
12 Ruch cząstki naladowanej w polu elektrycznym 13 Ruch naładowanej cząstki w polu magnetycznym
13 Ruch naładowanej cząstki w polu magnetycznym
31. Ruch ładunku w polu elektrostatycznym, Fizyka - Lekcje
Prąd elektryczny to uporządkowany ruch naładowanych elektrycznie cząsteczek
Kompendium Fizyka, 23-35, 17.17 Ruch ?adunk?w w polu elektrycznym.
17 Ruch ladunku w polu elektromagnetycznym Prad elektryczny (2)
Cw 7 Pomiary Podstawowych wielkości w polu elektromagnetycznym
Ćw 523, MIBM WIP PW, fizyka 2, laborki fiza(2), 37-Dyfrakcja elektronów i światła na sieci krystalic
fizyka ruch po okręgu
Analizowanie zjawisk występujących w polu elektrycznym i magnetycznym
więcej podobnych podstron