Wyrównanie
Wyrównanie
obserwacji GPS
obserwacji GPS
Rodzaje błędów
Rodzaje błędów
Pomyłki
B
ł
ęd
y systematyczne
B
ł
ę
d
y
p
r
z
y
p
a
d
k
o
w
e
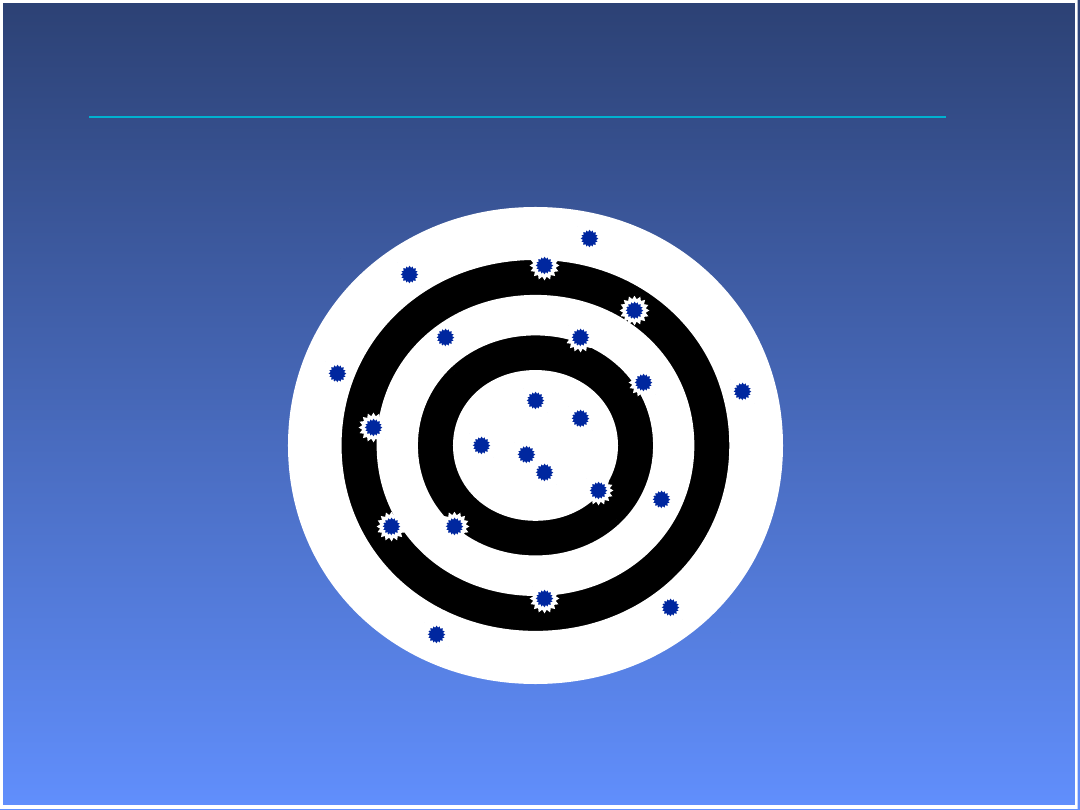
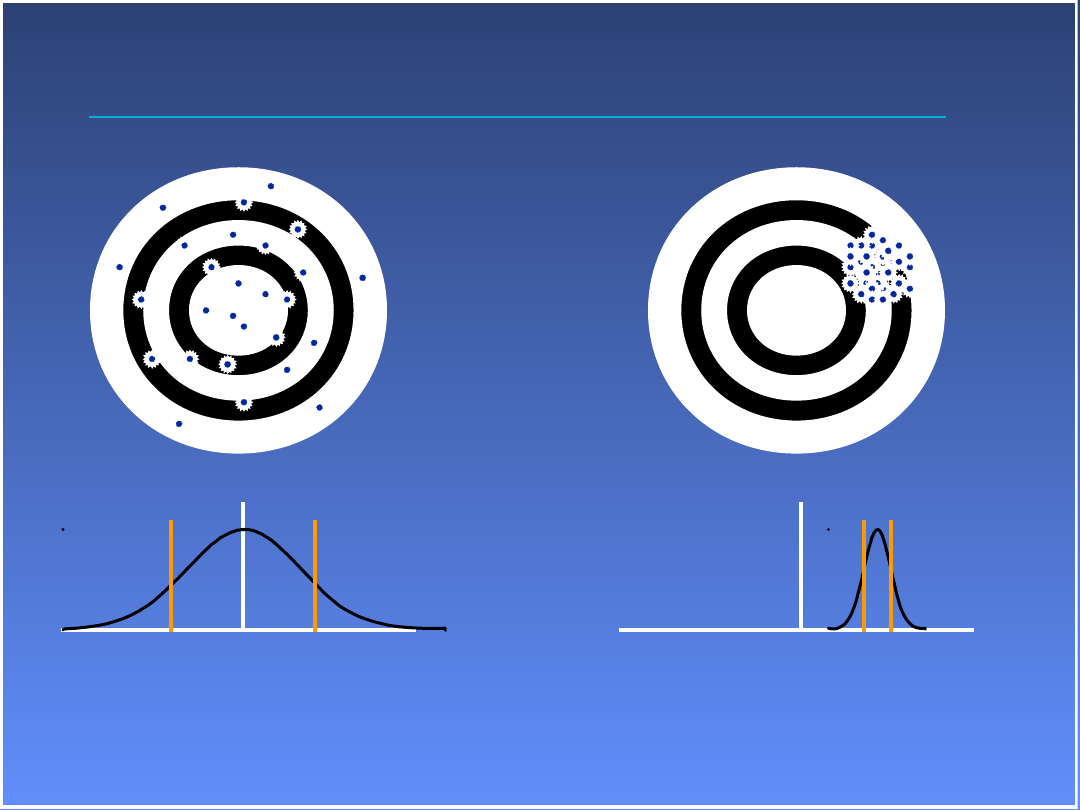
Dokładność
Dokładność
vs.
vs.
precyzja
precyzja
Wysoka dokładność a niska precyzja

Dokładność
Dokładność
vs.
vs.
precyzja
precyzja
Niska dokładność i wysoka
precyzja
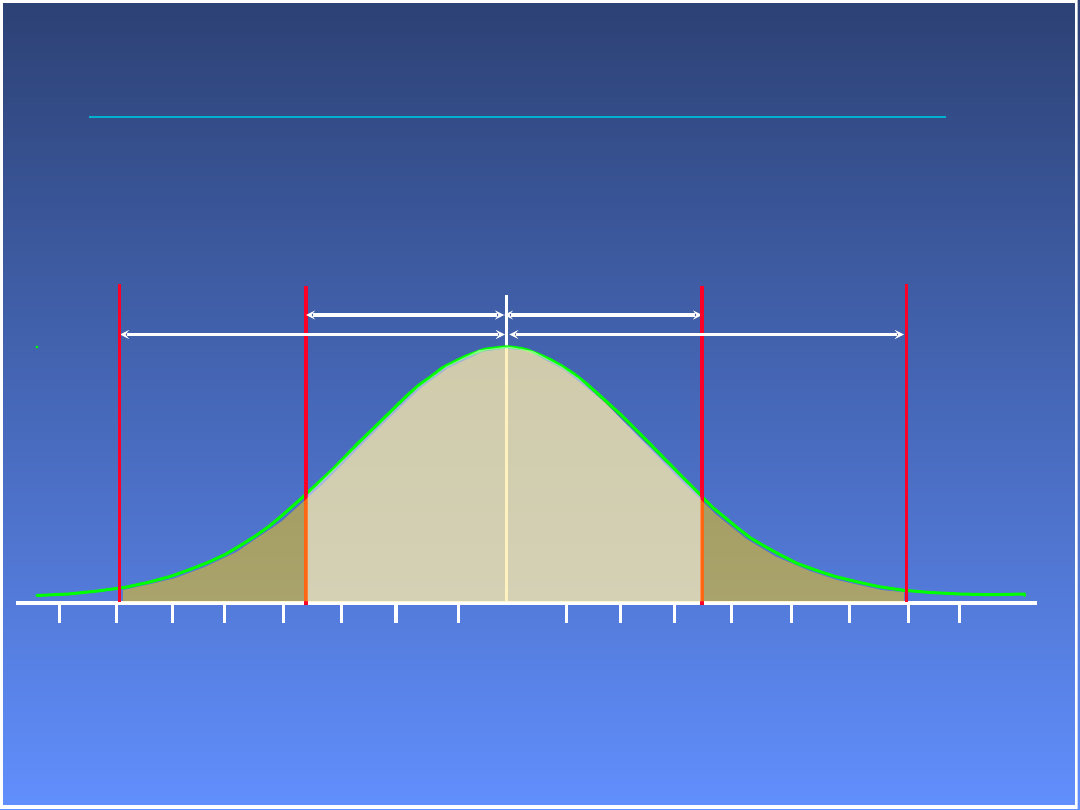
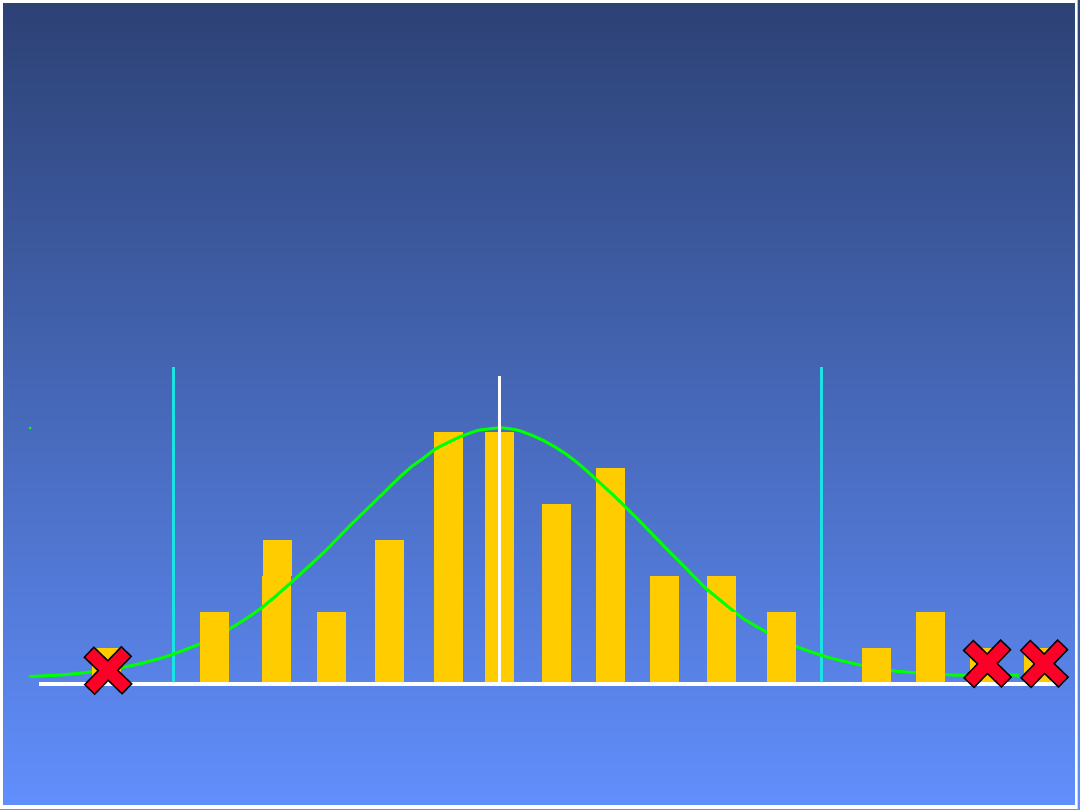
Odchylenie standardowe
Odchylenie standardowe
(
(
rozkład
rozkład
normalny
normalny
)
)
4.0
Ś
re
d
n
ia
0.5 1.0 1.5 2.0 2.5 3.0 3.5
-0.5
-1.0
-1.5
-2.0
-2.5
-3.0
-3.5
-4.0
Wartości poprawek
(cm)
1
1
2
2
x
i 1
N
i
2
1
N 1
(x x )
Odchylenie standardowe
Odchylenie standardowe
(sigma, s)
(sigma, s)
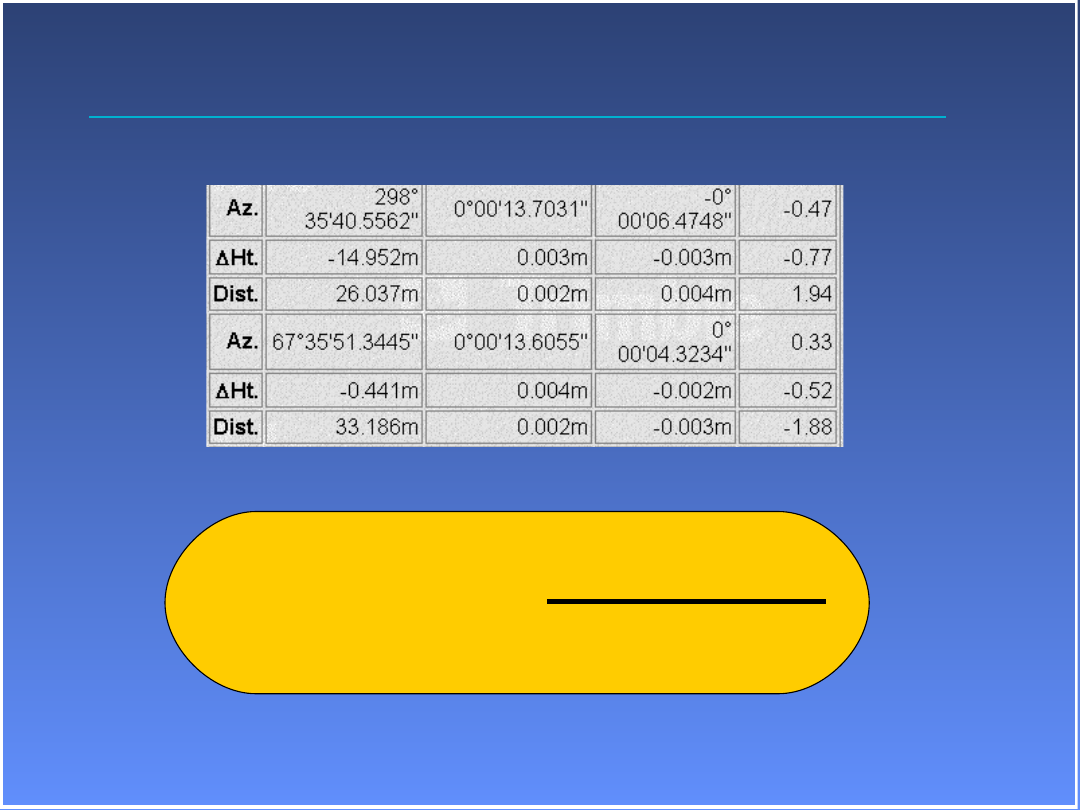
Odchylenie standardowe -
Odchylenie standardowe -
przykład
przykład
Składowe wektora (metry):
dx -7.274
dy 81.883
dz 84.825
Odchylenie standardowe (metry): 0.000392 0.000648 0.000883
dn 107.199 de -49.608 du -0.571
0.000561 0.000352 0.000956
dh -0.570
0.000956
Macierz wariancyjno-kowariancyjna 1.539165E-007
1.168243E-007 4.202073E-007
-1.185407E-007 -3.448070E-007 7.789994E-007
Błędy obserwacji – a’priori
Błędy obserwacji – a’priori
•
Oszacowanie błędów obserwacji
przed wyrównaniem
Błąd centrowania
Błąd centrowania
Określa „swobodę zaczepienia” wektora

X
+
Stała
Macierz
błędów
a priori
Błędy
centrowania
(
)
[ ]
Ostateczne wartości błędów
Ostateczne wartości błędów
obserwacji
obserwacji
Poprawka
Poprawka
standaryzowana
standaryzowana
Poprawka
standaryzowana
Poprawka
=
Poprawki
Kryterium Tau
Kryterium Tau
1
2
3
4
1
2
3
4
Błąd
Błąd

Wyrównanie - korzyści
Wyrównanie - korzyści
•
Możliwe przy założeniu, że obserwacje
obarczone są błędami przypadkowymi
•
W przypadku obserwacji nadliczbowych
pozwala uzyskać jedno rozwiązania
•
Minimalizuje wartości poprawek
•
Pozwala wykrywać błędy grube i znaczne
błędy pomiarowe
•
Daje oszacowanie dokładności wyrównywanej
sieci (współrzędnych i ich funkcji)

Etapy wyrównania
Etapy wyrównania
Wyrównanie sieci wykonuje się
zwykle w dwóch krokach:
Wyrównanie swobodne
(niezniekształcające)
•
Wyrównanie nawiązane

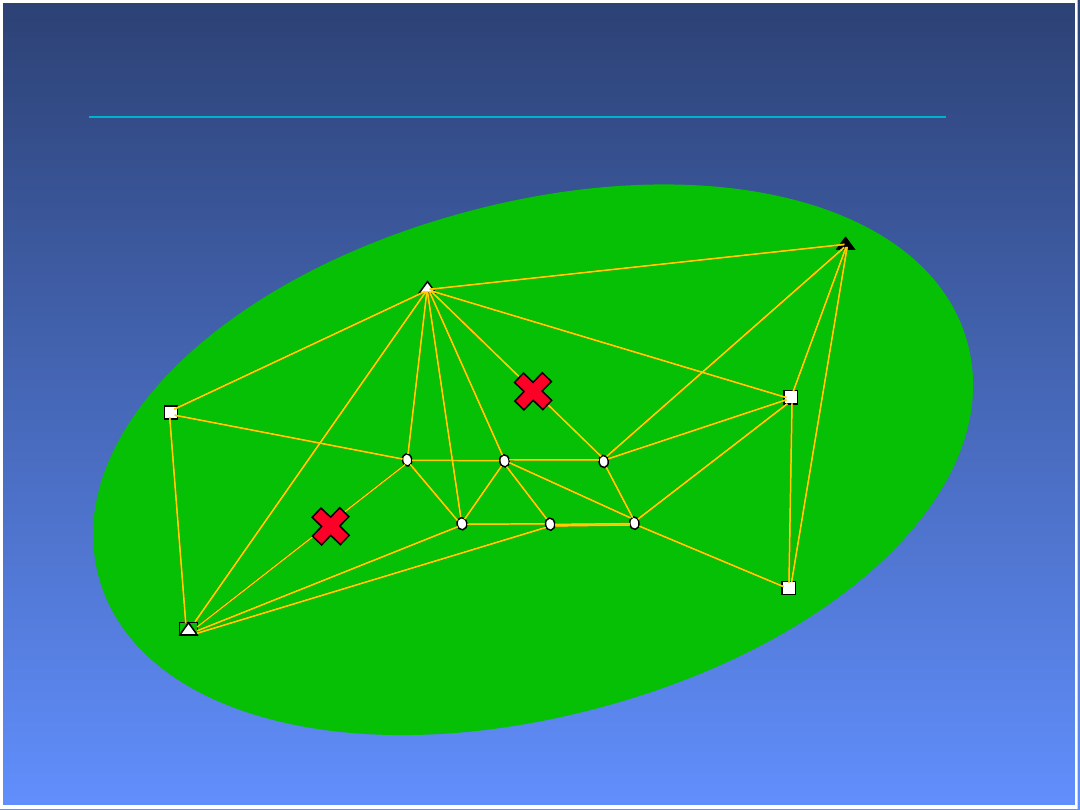
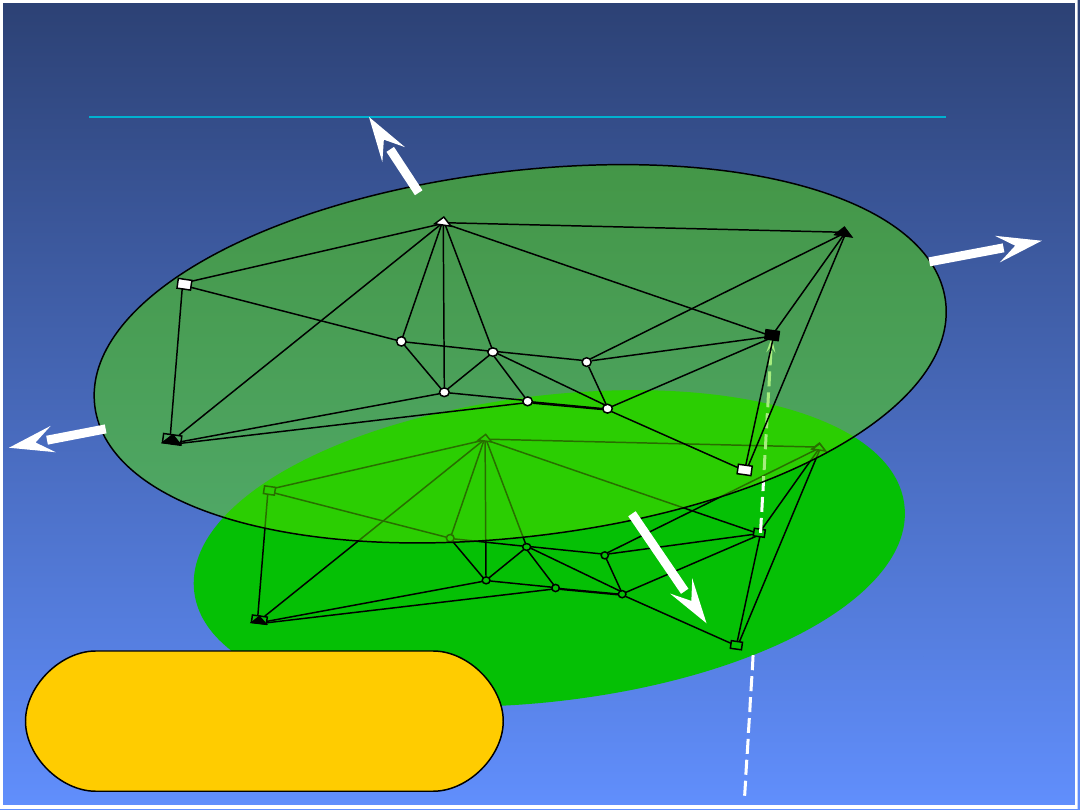
Wyrównanie niezniekształcające
Wyrównanie niezniekształcające
•
Pozwala skontrolować wewnętrzną
spójność sieci
•
Pozwala wykryć omyłki i odstające
obserwacje (błędy grube)
•
Daje najlepsze oszacowanie
rozkładu błędów w sieci
Wyrównanie
Wyrównanie
niezniekształcające
niezniekształcające

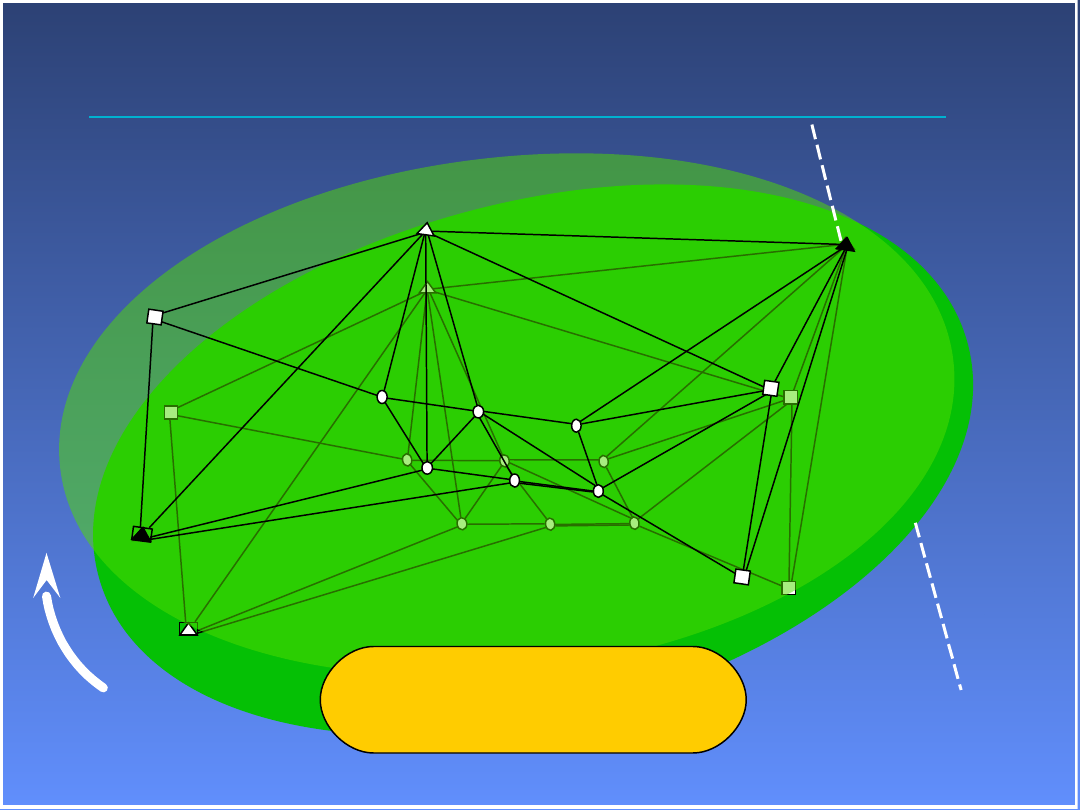
Wyrównanie niezniekształcające
Wyrównanie niezniekształcające
•
Prowadzi się iteracyjnie
do czasu kiedy …
•
wszystkie błędne
obserwacje zostaną
usunięte z sieci
•
oszacowanie dokładności
obserwacji będzie
optymalne (np. mo=1)

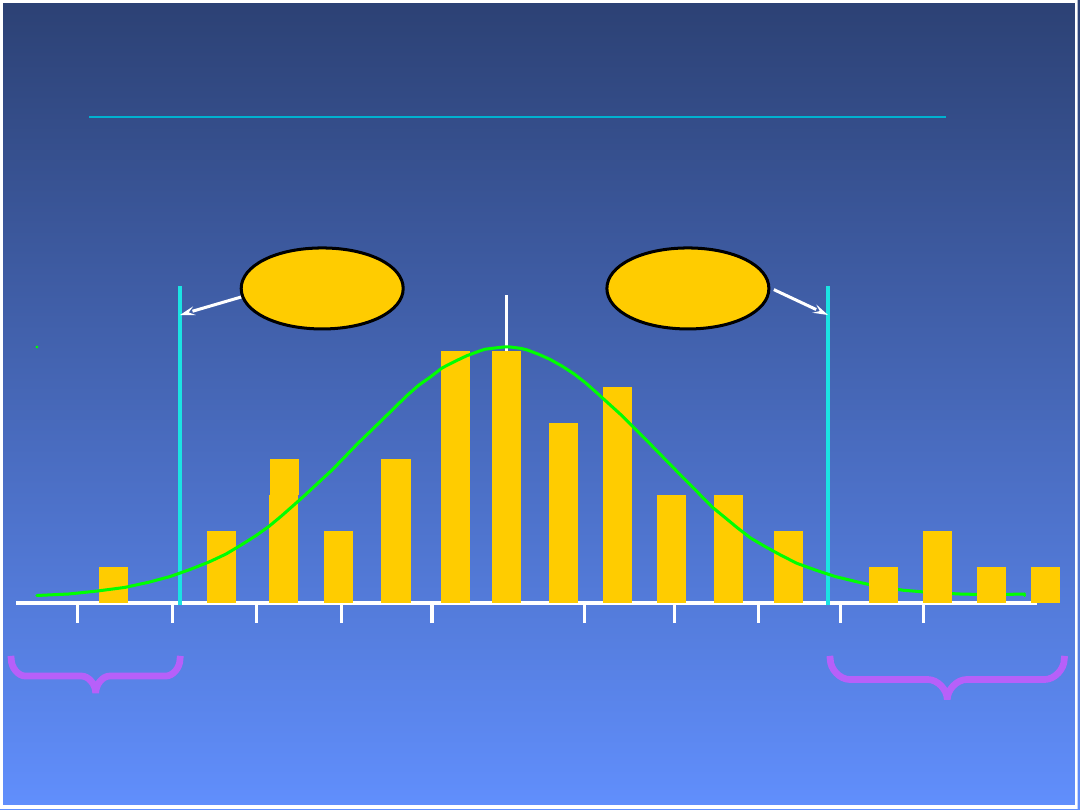
Test (
Test (
2
2
)
)
•
Test statystyczny badający
zgodność obserwacji z rozkładem
normalnym (liczony w funkcji
błędów obserwacji, nadliczbowości
i założonego poziomu ufności)
•
Wyrównanie zwykle nie spełnia
testu dopóty, dopóki błąd typowy
sieci znacznie odbiega od jedności

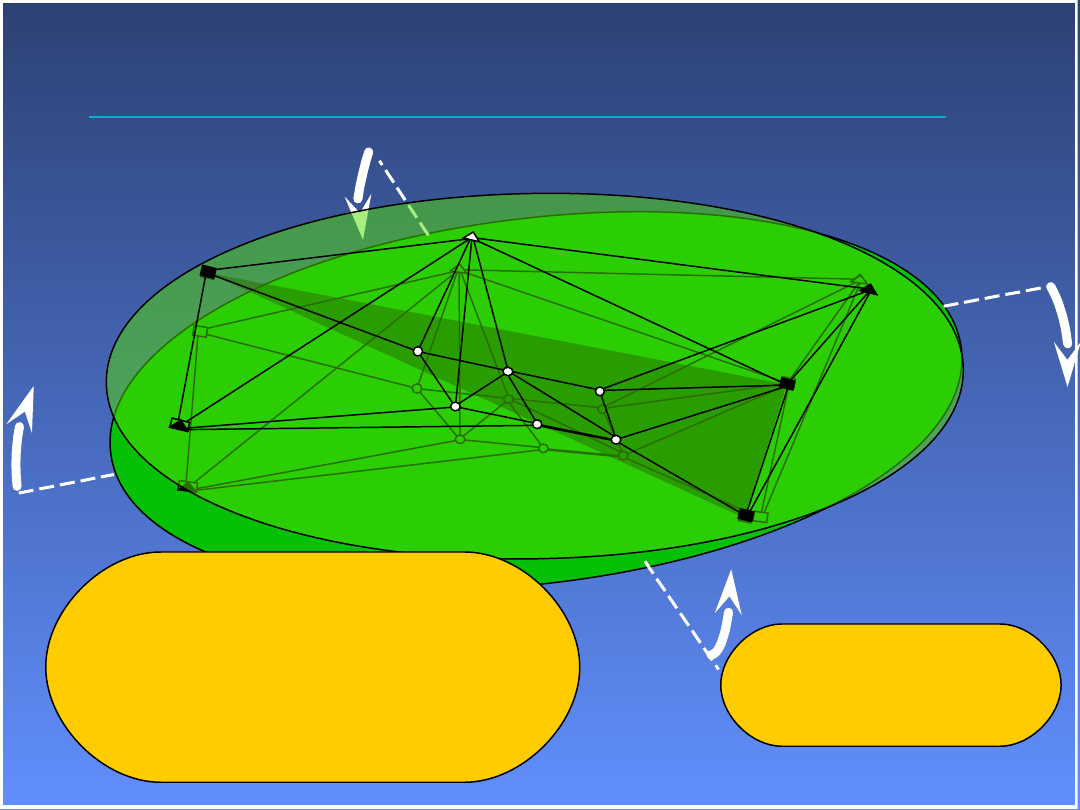
Wyrównanie nawiązane
Wyrównanie nawiązane
•
Nawiązuje sieć do istniejącej
osnowy
•
Zwiększa niezawodność sieci
•
Transformuje współrzędne
punktów sieci do układu
zdefiniowanego poprzez punkty
nawiązania
Wyrównanie nawiązane
Wyrównanie nawiązane
2 punkty (XY) określają
kąt obrotu
Wyrównanie nawiązane
Wyrównanie nawiązane
2 punkty (XY) i
1 punkt (H)
Definiuje kąt obrotu i skalę sieci
Wyrównanie nawiązane
Wyrównanie nawiązane
2 punkty (XY) i
3 punkty (H)
Definiują kąt obrotu,
skalę sieci i odchylenie pionu
(Transformacja 7-mio parametrowa )
Nawiązanie do większej
liczby punktów zwiększa
pewność rozwiązania
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
Wyszukiwarka
Podobne podstrony:
WYRÓWNOWAZANIE WAŁÓW (WYWAŻANIE WAŁÓW )
polaczenia wyrownawcze
sylaby, Zbiór kart pracy do zajęć wyrównawczych dla kl. I-III
kinetyka, studia, ochrona środowiska UJ, chemia ogólna i nieorganiczna, wyrównawcze
program zajęć wyrownawczych, kształcenie specjalne
zajęcia wyrównawcze vol I
Cztery rodzaje wyrównań
[ĆW 3] Wyrównanie sieci poziomej sprawozdanie
BADANIE PROSTOWNIKA REWERSYJNEGO Z BLOKADĄ PRĄDÓW WYRÓWNAWCZYCH
Z Obliczenia dla sieci kątowej, Geodezja i Kartografia, Rachunek Wyrównawczy
rownowagi1, studia, ochrona środowiska UJ, chemia ogólna i nieorganiczna, wyrównawcze
jak pracować z dz mającymi trud w czyt i pis, WYRÓWNAWCZE, zajęcia wyrównawcze
Sieci płaskie, Geodezja i Kartografia, Rachunek Wyrównawczy
Obliczenia na liczbach przybliżonych, Geodezja i Kartografia, Rachunek Wyrównawczy
18 struktur wyrazowych, ZEW i EP Kolegium Nauczycielskie w Bytomiu, IV semestr, wyrównawcze- galińsk
Program zajęć kompensacyjno wyrównawczych kl 1
Mój Plan zajęć wyrówn SZKOŁA PODSTAWOWA NR 5 W EŁKU
Zadanie 5 Wyrównanie sieci geodezyjnej na elipsoidzie
więcej podobnych podstron