Plan nalotów, parametry zdjęć
lotniczych
Katedra Fotogrametrii i Teledetekcji
Akademia Rolnicza w Krakowie

Podstawowe parametry zdjęć lotniczych przy opracowaniu planu
nalotu, wybór ich wartości.
1.
Ocena jakości fotogrametrycznej wykonanego nalotu.
2.
Praktyczne opracowanie planu nalotu.
Ad. 1
Podstawowe parametry :
•
skala oryginalnego zdjęcia (m),
•
wysokość fotografowania (W),
•
ogniskowa kamery (f),
•
format zdjęcia (lx ly),
•
wielkość pokrycia (p i q),
•
czas otwarcia migawki (T),
•
prędkość samolotu (V),
•
interwał między dwiema kolejnymi ekspozycjami (t)
•
plamka rozmazania (σ)

Plan
nalotu
Wybór konkretnych wartości tych parametrów powinien być
uzasadniony:
•
podstawowym przeznaczeniem wykonywanego nalotu, np
wykonanie w żądanej skali opracowania sytuacyjnego,
sytuacyjno- wysokościowego, fotointerpretacja, specjalne
przeznaczenie.
•
charakterem fotografowanego terenu (rzeźba, zagęszczenie
sytuacji, rodzaj szczegółów itp).
•
przewidywaną technologią i okresem wykonania niezbędnych
opracowań a również ich dokładnością i kosztami.

Sposoby doboru skali nalotu
Wybór skali :
A/ według empirycznego wzoru Grubera
gdzie: m
z
- mianownik skali zdjęcia
M - mianownik skali opracowania,
C - wielkość stała, wartość której może się wahać w
zależności od jakości technicznej sprzętu stosowanego
zarówno do wykonania jak i opracowania zdjęć.
Gruber przyjął c =130, obecnie w związku z postępem
technicznym w konstrukcji sprzętu fotogrametrycznego
wartość „ C’ dochodzi do 280 a nawet 300 .
M
C
m
z

Sposoby doboru skali nalotu
B/ na podstawie wielkości błędów pomiaru
fotogrametrycznego (w skali zdjęcia lub modelu) i
dopuszczalnych błędów opracowania końcowego (w
skali opracowania)
Średnie błędy położenia wyrażone w skali zdjęcia wynoszą odpowiednio:
0,04 - 0,06 mm dla metody analitycznej,
0,06 - 0,08 mm dla sposobu analogowego, autogrametrycznego
0,10 - 0,12 mm przy opracowaniu w oparciu o przetwarzanie
Przyjmując skalę opracowania 1 : 2000 i dopuszczalny błąd położenia 0,3
- 0,4 mm otrzymamy skalę zdjęcia odpowiednio :
1 : 14000 dla metody analitycznej 0,057 = 0,35 mm
1 : 10000 dla metody analogowej 0,075 = 0,35 mm
1 : 7000 przy przetwarzaniu 0,113,5=0,38 mm
W przykładzie nie wzięto pod uwagę błędów graficznych nieuniknionych
przy sporządzaniu pierworysu. Po ich uwzględnieniu otrzymamy
odpowiednio :
dla metody analitycznej 1 : 10000 - 1 : 11000
dla metody analogowej 1 : 8000 - 1 : 9000
przy przetwarzaniu 1 : 6000 - 1 : 7000

Sposoby doboru skali nalotu
C/ na podstawie minimalnych wielkości obiektów,
które powinny zostać odfotografowane
gdzie : z - zdolność rozdzielcza oryginalnego
zdjęcia
d - minimalny wymiar obiektu w terenie
1
1
m z d

Plan nalotu
Typowe relacje między skalą zdjęć a skalą opracowania
1 : M (skala mapy) 1 : m (zakres skal zdjęć)
1: 500 1 : 3500 - 1 : 5500
1 : 1000 1 : 5500 - 1 : 8000
1 : 2000 1 : 8000 - 1 : 12000
1 : 5000 1 : 13000 - 1 : 20000
1 : 10000 1 : 19000 - 1 : 28000
1 : 25000 1 : 30000 - 1 : 45000

Plan nalotu
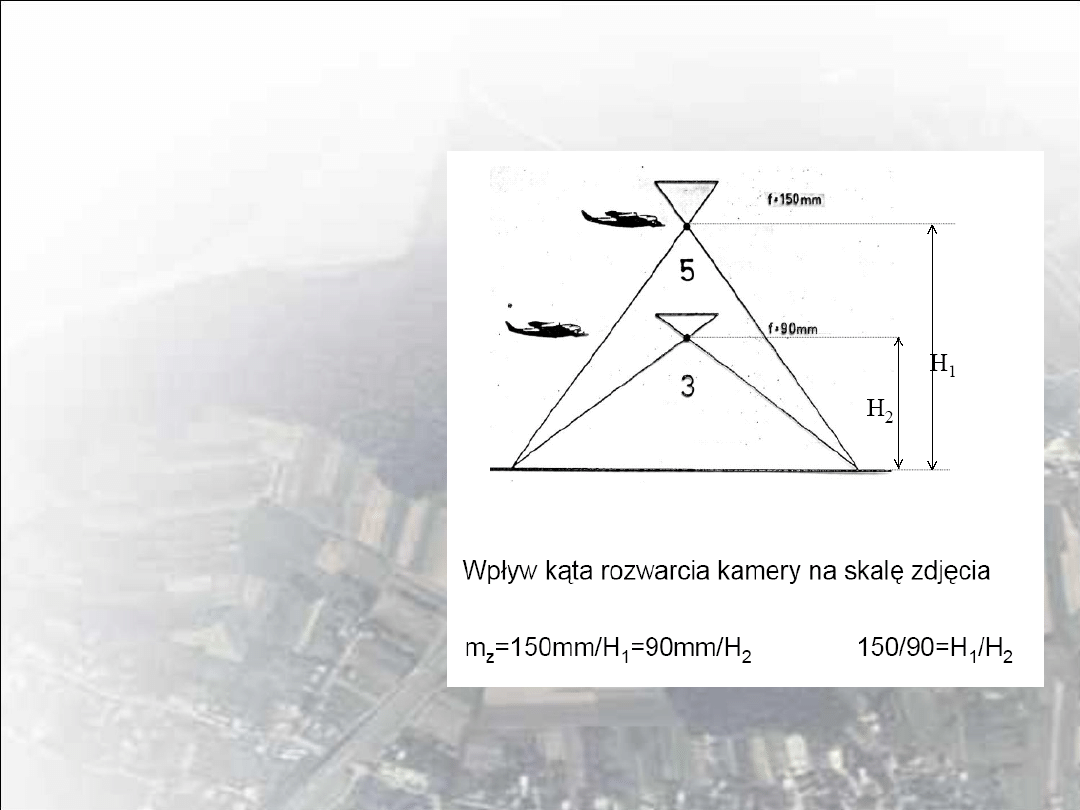
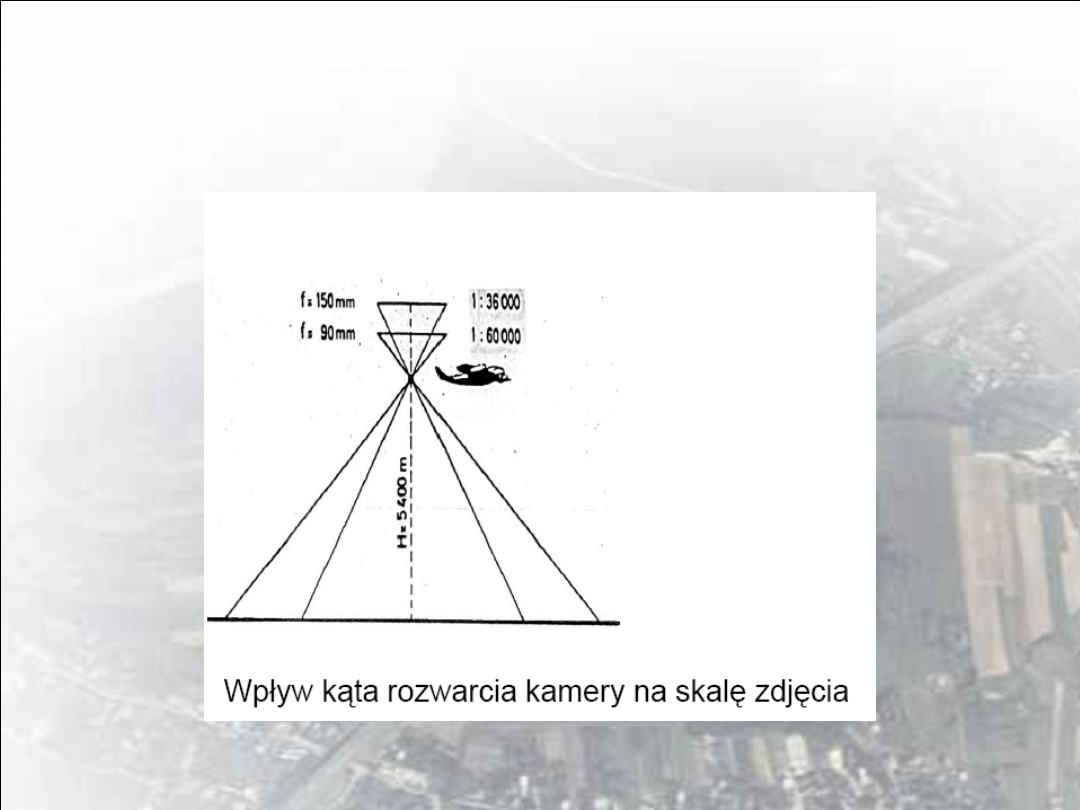
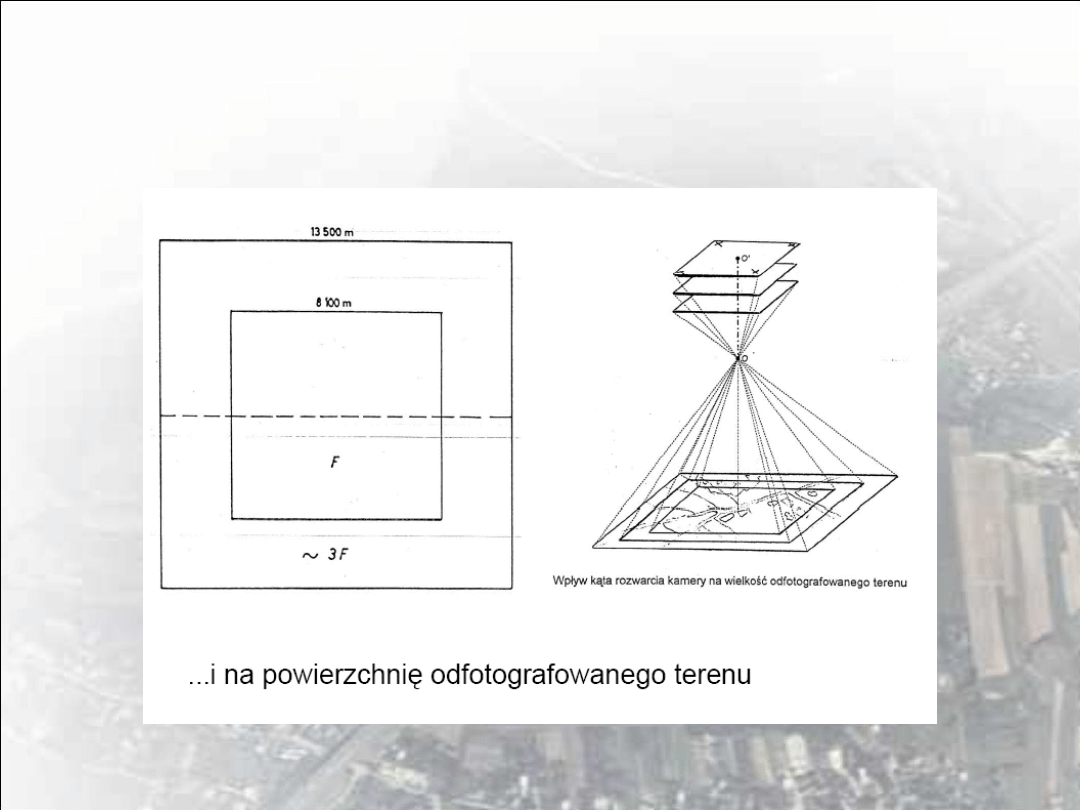
Wysokość fotografowania i ogniskowa kamery są wielkościami
bezpośrednio zależnymi od skali zdjęcia. Konkretna wartość f jest
uzależniona warunkami terenowymi i przeznaczeniem wykonywanego
nalotu. Dla opracowań sytuacyjnych stosowane są zazwyczaj
obiektywy normalnokątne, rzadziej szerokokątne przy założeniu, że
teren jest równy lub pofałdowany. Przy opracowaniach
stereometrycznych terenu równinnego celem zwiększenia dokładności
określenia wysokości stosuje się obiektywy szerokokątne. W terenach
górskich obiektywy szerokokątne raczej nie są stosowane.
Minimalna wysokość fotografowania jest limitowana szybkością i możliwym
najmniejszym pułapem samolotu, interwałem czasowym,
dopuszczalnym rozmazaniem (wielkość plamki rozmazania), a w
przypadku znacznych deniwelacji w terenie, stosunkiem h : W, którego
wielkość powinna wynosić 1/8 do 1/10 i nie może być większa od 1/4.
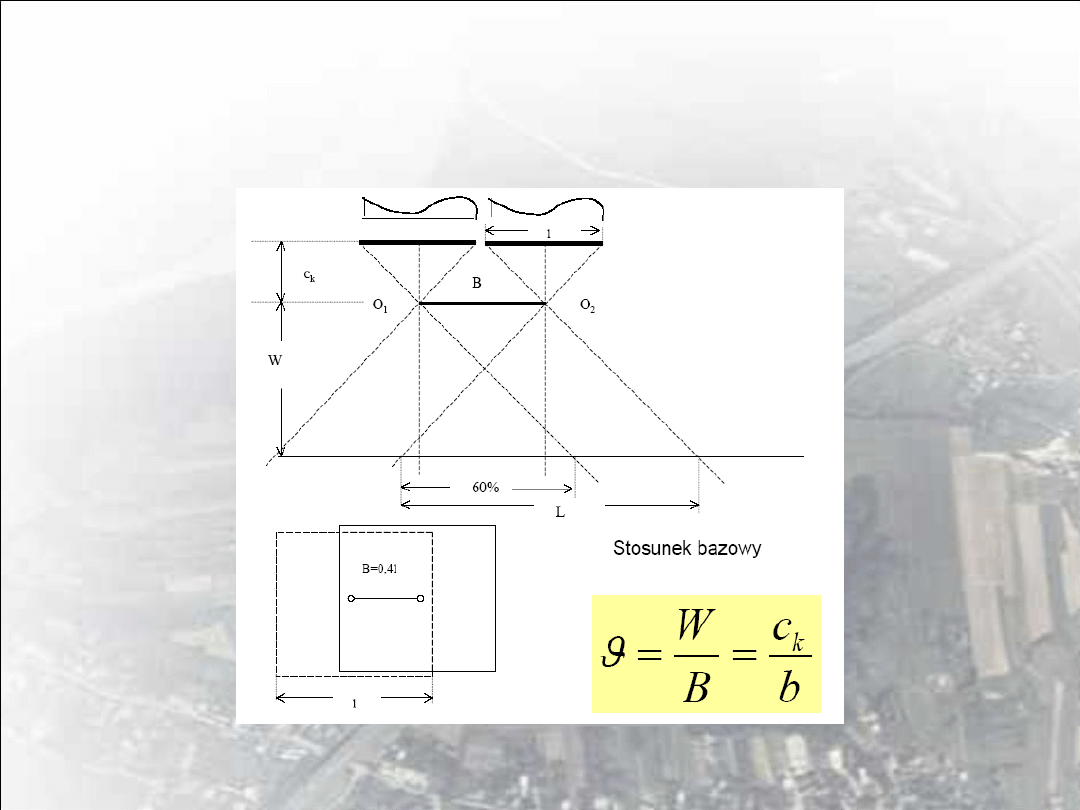
Również stosunek B : W jest bardzo istotny szczególnie dla opracowań
stereometrycznych. Na wartość B : W wpływa wielkość pokrycia
podłużnego. Pokrycie podłużne zależy od przeznaczenia zdjęć i tak dla
opracowań sytuacyjnych drogą przetwarzania wynosi 20% - 30%,
natomiast dla stereometrycznych pokrycie powinno być większe od
50%.
Plan nalotu
Plan nalotu
Dla obecnie powszechnie
używanego formatu kadru
lotniczych kamer
pomiarowych
23x23 cm stosuje się
obiektywy:
normalnokątny f ≈ 305
mm,
2β = 55º
półnormalnokątny f ≈ 210
mm,
2β = 70º
szerokokątny f ≈ 153
mm,
2β = 90º
nadszerokokątny f ≈
88 mm,
2β
= 120º
1:
Plan nalotu
Plan nalotu
Plan nalotu
Plan nalotu

Plan nalotu
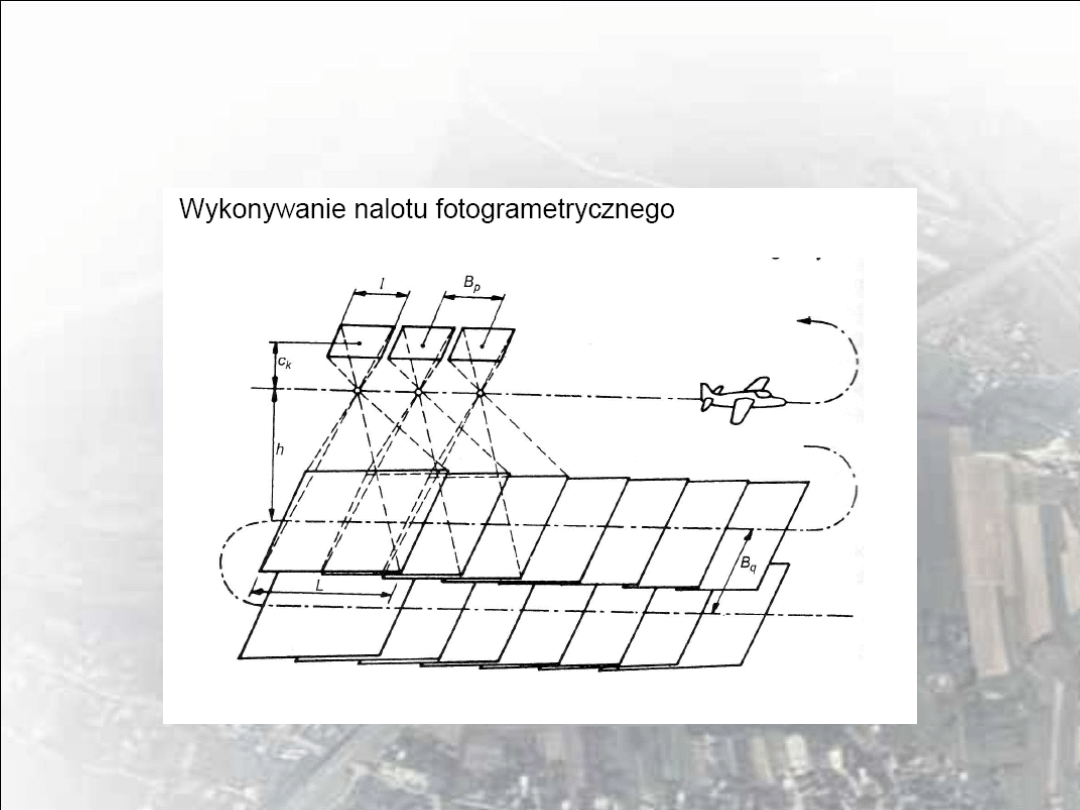
Wielkość pokrycia podłużnego (określa pokrycie między
sąsiednimi zdjęciami w szeregu i wyrażane jest w procentach).
Projektowane zasadnicze pokrycie podłużne zdjęć lotniczych
dla opracowań stereoskopowych wynosi standartowo po= 60 %
Przy fotografowaniu terenów pofałdowanych pokrycie podłużne
należy zwiększyć o wpływ rzeźby terenu. Oblicza się je ze
wzoru :
p[%] =
p
o
– zasadnicze pokrycie (po= 60 %)
h – przewyższenie względem średniej płaszczyzny odniesienia
W
h
50
[%]
p
o

Plan nalotu
Wielkość p
o
w funkcji skali zdjęć
Skala zdjęć
p
o
1: 1000 – 1: 4999 65
1: 5000 – 1: 9999 64
1: 10000 – 1: 24999
62
1: 25000 i mniejszych
60

Plan nalotu
Pokrycie poprzeczne (określa pokrycie zdjęć między sąsiednimi
szeregami i wyrażane jest w %). Projektowane zasadnicze pokrycie
poprzeczne zdjęć lotniczych wynosi standartowo:
q
o
= 30% dla fotografowania z wysokości ≤ 1500 m
q
o
= 25% dla fotografowania z wysokości > 1500 m
Przy fotografowaniu terenów pofałdowanych pokrycie poprzeczne należy
zwiększyć o wpływ rzeźby terenu. W przybliżeniu określa je
zależność
q[%]=
Wielkość q
o
w funkcji skali zdjęć
Skala zdjęć q
o
1: 1000 – 1: 4999 40
1: 5000 – 1: 9999
36
1: 10000 – 1: 24999
34
1: 25000 – 1: 34999
32
1: 35000 i mniejszych 30
W
h
50
[%]
q
o

Plan nalotu
Format zdjęć
-
zdjęcia lotnicze wykonywane są w formatach 18 x 18 cm
(zdjęcia archiwalne) i 23 x 23 cm (obecnie stosowane).
Pomimo ustalonych parametrów zdjęć, nalot dla celów
kartograficznych powinien dodatkowo spełniać szereg
warunków :
•
linie nalotu (osie szeregów) powinny być z dokładnością 0,015 m
równoległe do zadanych linii, np. ramki sekcyjnej, linii znaków
orientacyjnych itp.
•
szeregi powinny być prostoliniowe a odchylenie punktów głównych
poszczególnych zdjęć od prostej łączącej punkty główne skrajnych
zdjęć szeregu nie powinny przekroczyć 3% długości tej prostej,
•
brzegi zdjęć powinny być w przybliżeniu równoległe (prostopadłe) do
osi szeregu,
•
wahania wysokości nie powinny przekracza 3% W,
•
kąty odchylenia osi optycznych od linii pionu nie powinny przekraczać
1,5° - 2 °, a nachylenia powyżej 3 ° są niedopuszczalne,
•
osie szeregów powinny przebiegać równoleżnikowo to jest ze
wschodu na zachód, lub być dostosowane do kształtu zdejmowanego
obiektu (np. pokrywać się z osią obiektów liniowych),
•
linie nalotu powinny być tak zaprojektowane aby w ramach
poszczególnych stereogramów wahania wysokości były możliwie jak
najmniejsze.

Plan nalotu
Dla prawidłowego projektu planu nalotu istotnymi są zależności jakie
zachodzą pomiędzy określonymi jego parametrami. W
szczególności pomiędzy prędkością samolotu (v), czasem
otwarcia migawki (T) a wielkością rozmazania σ (plamka
rozmazania) oraz prędkością samolotu (v), czasem pomiędzy
ekspozycjami (t) a pokryciem podłużnym (p).
Rozmazanie obrazu spowodowane ruchem samolotu w czasie
otwarcia migawki kamery wynosi:
V - prędkość samolotu
T - czas ekspozycji
m - skala zdjęć
m
T
V
W
T
V
f

Plan nalotu
Aby wielkość plamki σ nie przekroczyła żądanej wielkości
(np. 0,04mm) należy zastosować odpowiedni czas
ekspozycji (T) obliczony ze wzoru :
Interwał fotografowania (t) (interwał czasu między
wykonaniem kolejnych zdjęć w szeregu) zależy od skali
zdjęć, prędkości samolotu, pokrycia podłużnego i wynosi
V
m
T
100
100 p
V
m
l
V
B
t
x
Plan nalotu
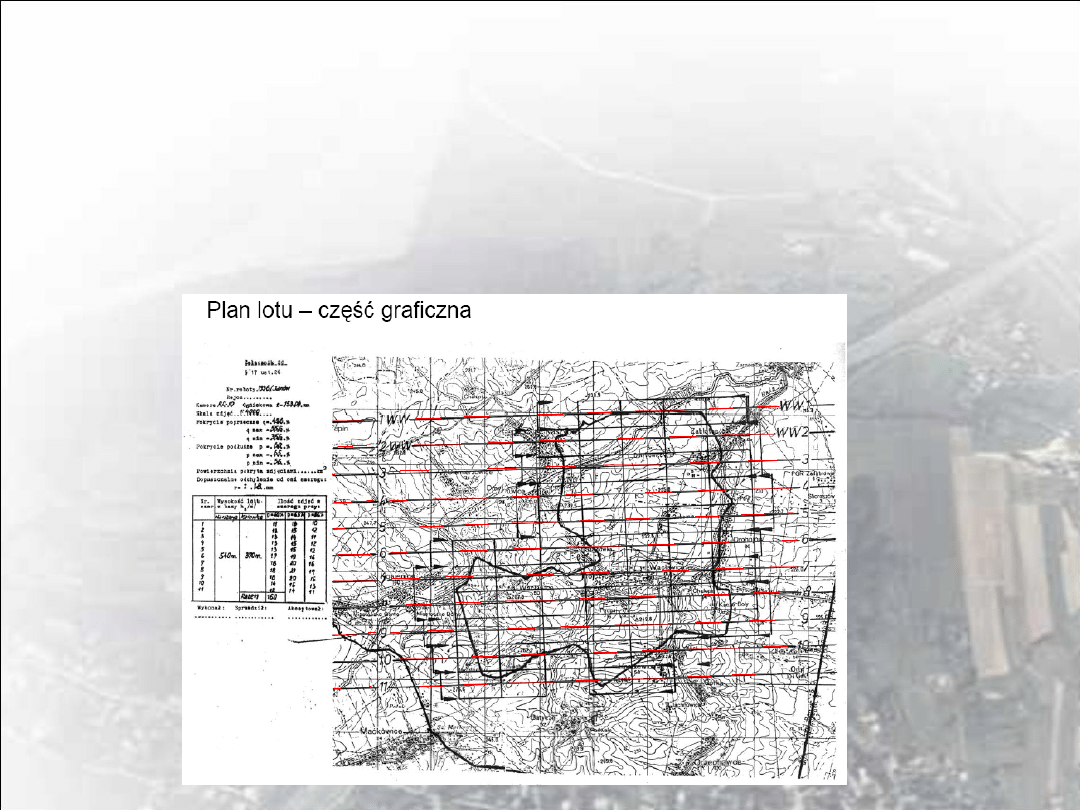
Projekt lotu składa się z części obliczeniowej i graficznej,
opracowywany jest na istniejących mapach topograficznych w
skali kilkakrotnie mniejszej od skali zdjęć.

Plan nalotu
Dane wejściowe
•
skala mapy (M)
•
obszar opracowania (wniesiony na mapę)
•
rodzaj opracowania fotogrametrycznego
•
typ kamery
•
prędkość (V) i pułap samolotu
•
wysokość bezwzględna lotniska H
lot
Na podstawie analizy danych określa się:
•
rodzaj stożka kamery (f)
•
pokrycie podłużne (p) i poprzeczne (q) zdjęć
•
skalę wykonanych zdjęć (1: m)
•
kierunek lotu

Plan nalotu
Następnie oblicza się:
•
wysokość lotu ponad poziom lotniska W
lot
•
odstęp między osiami szeregów (By)
•
długość bazy (Bx)
•
ilość szeregów (Ny)
•
ilość zdjęć w szeregach (Nx)
•
powierzchnia stereogramu (Pm) i powierzchnia użyteczna (Pn)
•
interwał czasu między kolejnymi ekspozycjami (t)
•
maksymalny dopuszczalny czas ekspozycji (T)
•
długość błony filmowej
Na mapę do projektu należy wnieść:
•
granicę obiektu terenu
•
granicę sekcji
•
osie szeregów
•
znaki włączenia i wyłączenia kamery

Plan nalotu
Podstawowe wzory:
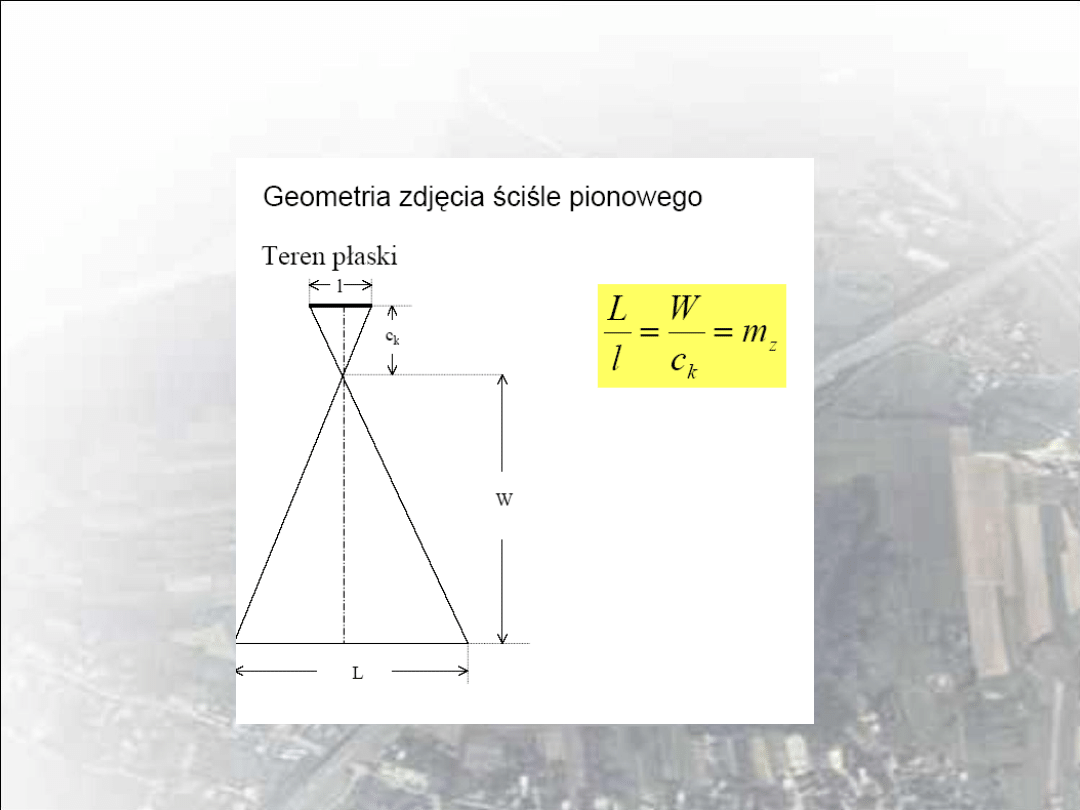
1. skala zdjęć 1: m= f :W
2. wysokość fotografowania W = mf
3. terenowy zasięg zdjęcia L = lm
4. baza podłużna
5. baza poprzeczna
6. stosunek bazowy
7. wysokość absolutna lotu W
abs
= W + H
śr
8. wysokość lotu względem lotniska
W
lot
= W + H
śr
- H
lot
100
100 p
L
B
x
100
100 q
L
B
y
f
b
W
B
v
x
x

Plan nalotu
9. powierzchnia zdjęcia
P
z
= L
2
10. powierzchnia modelu
P
m
= (L – B
x
) L
11. powierzchnia użyteczna modelu
P
n
= B
x
By
12. liczba zdjęć w szeregu
(Dx – długość obszaru fotografowania)
13. liczba szeregów
(Dy – szerokość obszaru
fotografowania)
14. całkowita liczba zdjęć w rejonie N = N
x
N
y
lub
P
ob
- powierzchnia obszaru
fotografowania
5
x
x
x
B
D
N
y
y
y
B
D
N
n
ob
P
P
N

Plan nalotu
PRZYKŁAD OBLICZENIA
Dx = 24 km, Dy = 6 km, Pob = 144 km2, M = 1:2000, f = 200mm, format
18x18cm,
Hśr =300, h = 100m, wysokość lotniska Hlot= 200m, V=160 km/godz.,
= 0,03mm, mk = 50000
Na podstawie podanej skali opracowania wybieramy zalecaną skalę nalotu
mz = 8000
Obliczamy wysokość względną lotu
W = mf = 8000200mm = 1600 m
Bezwzględna wysokość wyniesie :
W = 1600 m +300 m = 1900 m
Wysokość lotu odniesiona do wysokości lotniska
W = 1600 m + 300 m – 200 m = 1700 m

Plan nalotu
Z podanych powyżej zależności wyznaczamy pokrycie podłużne (p) i
poprzeczne (q)
p% = 64% + 67%
q% = 36% + 39%
Zasięg pojedynczego zdjęcia w terenie bez uwzględnienia pokrycia
Lx = 18cm 8000 = 1440m
Ly = 18cm 8000 = 1440m
Użyteczny zasięg zdjęcia to jest po uwzględnieniu pokrycia wyniesie :
Bx = 1440m(1-0,67)= 475m
By = 1440m(1-0,39)= 878,4 m
1600
100
50
1600
100
50

Plan nalotu
Powierzchnia użyteczna jednego zdjęcia wyniesie :
Bx By = 41,72ha
Ilość zdjęć (N) na obiekt możemy obliczyć z zależności :
N = zdjęć
lub jako iloczyn zdjęć w szeregu (N
x
) i ilości szeregów (N
y
)
N = NxNy = 51* 7 = 357 zdjęć
345
72
,
41
14400
ha
ha
51
5
,
50
475
24000
m
m
B
D
N
x
x
x
7
63
,
6
4
,
878
6000
m
m
B
D
N
y
y
y

Plan nalotu
do obliczonej ilości dodajemy jeszcze 10% do 15% tak zwanego
zapasu , otrzymując ogólną ilość zdjęć, która w naszym wypadku
wyniesie :
3571,1 = 393 zdjęć.
Mając ogólną ilość zdjęć obliczamy ilość potrzebnej błony w metrach :
d = 18 cm393 = 70,74m
ponieważ odstęp pomiędzy sąsiednimi zdjęciami wynosi 1 do 2 cm, to
przy 393 zdjęciach na odstępy należy doliczyć
3931,5cm = 5,90m
zatem łączna długość błony wyniesie:
70,74m + 5,90m = 76,64m
Typowe długości błon lotniczych wynoszą 60 lub 120 m, a zatem
należy zabrać jedną szpulę ze 120 metrami taśmy filmowej.
Plan nalotu
Linię nalotu wykreślamy z uwzględnieniem wyżej podanych
wymagań, przy czym skrajna linia przebiega w odległości
od brzegu obiektu a następne w odległości By
Pozostało jeszcze obliczenie wielkości najbardziej istotnych dla
operatora kamery to jest t, T, ewentualnie i V.
interwał czasowy pomiędzy dwoma kolejnymi ekspozycjami
wyniesie :
2
y
B
sekundy
sekund
sekund
km
mm
godz
km
mm
V
m
T
185
1
160000
864
3600
160
240
/
160
8000
03
,
0
sekund
m
sekund
m
godz
km
m
V
B
t
x
68
,
10
160000
3600
475
.
/
160
475
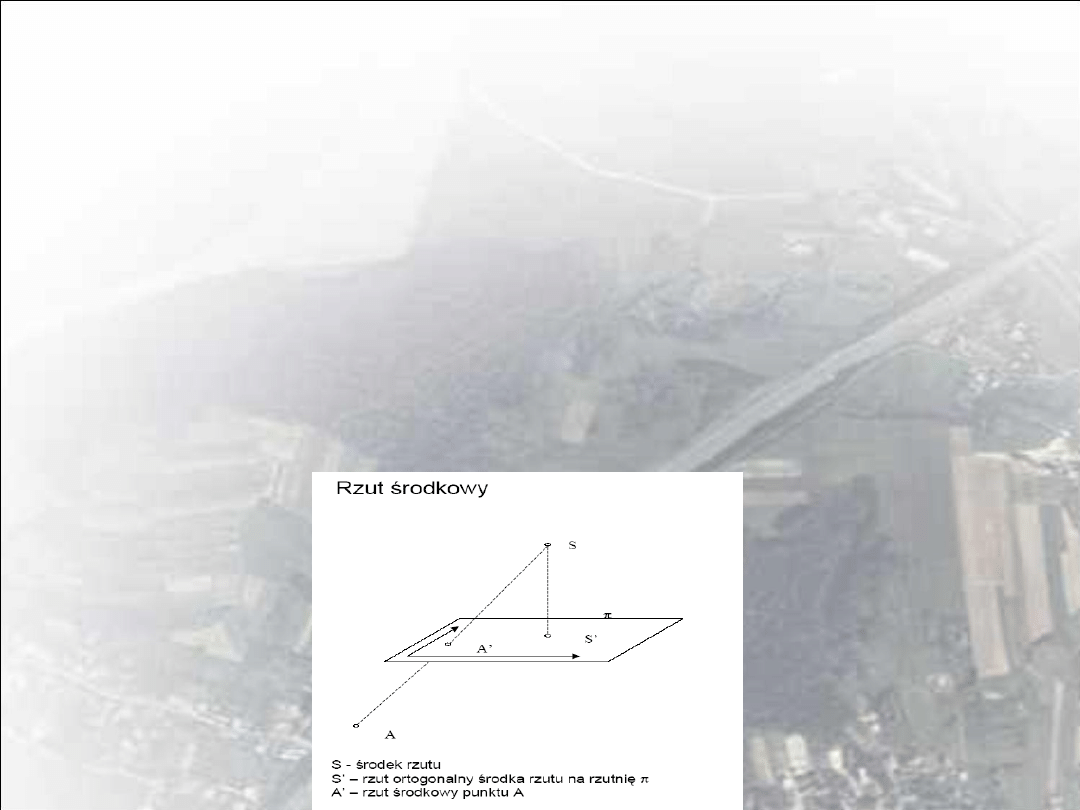
Zdjęcie będzie rzutem środkowym jeśli:
• obiektyw kamery będzie wolny od błędu dystorsji,
• w momencie ekspozycji materiał negatywowy lub matryca CCD
będą tworzyć płaszczyznę,
• po obróbce fotochemicznej lub długim przechowywaniu obraz nie
zostanie zdeformowany,
• migawka aparatu nie zniekształci obrazu (dlatego w kamerach
fotogrametrycznych stosuje się migawki centralne),
• obraz nie zostanie zniekształcony przez refrakcję atmosferyczną,
• wyżej wymienione błędy zostaną usunięte w procesie
fotogrametrycznym
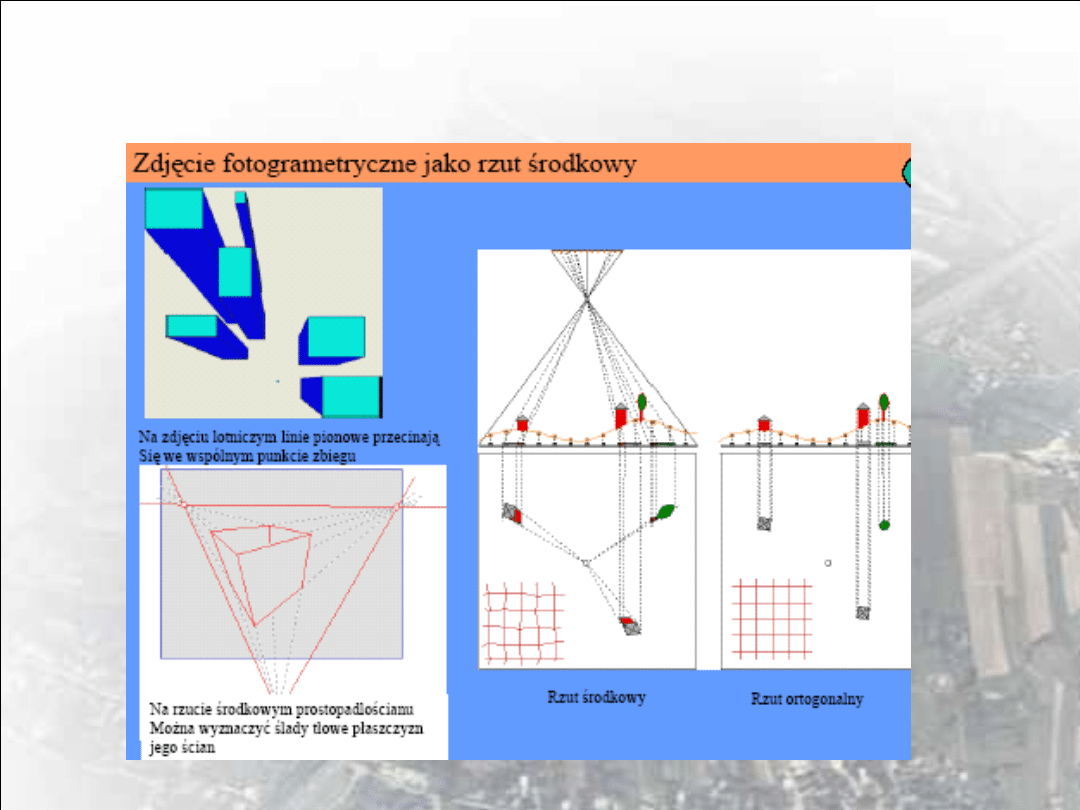
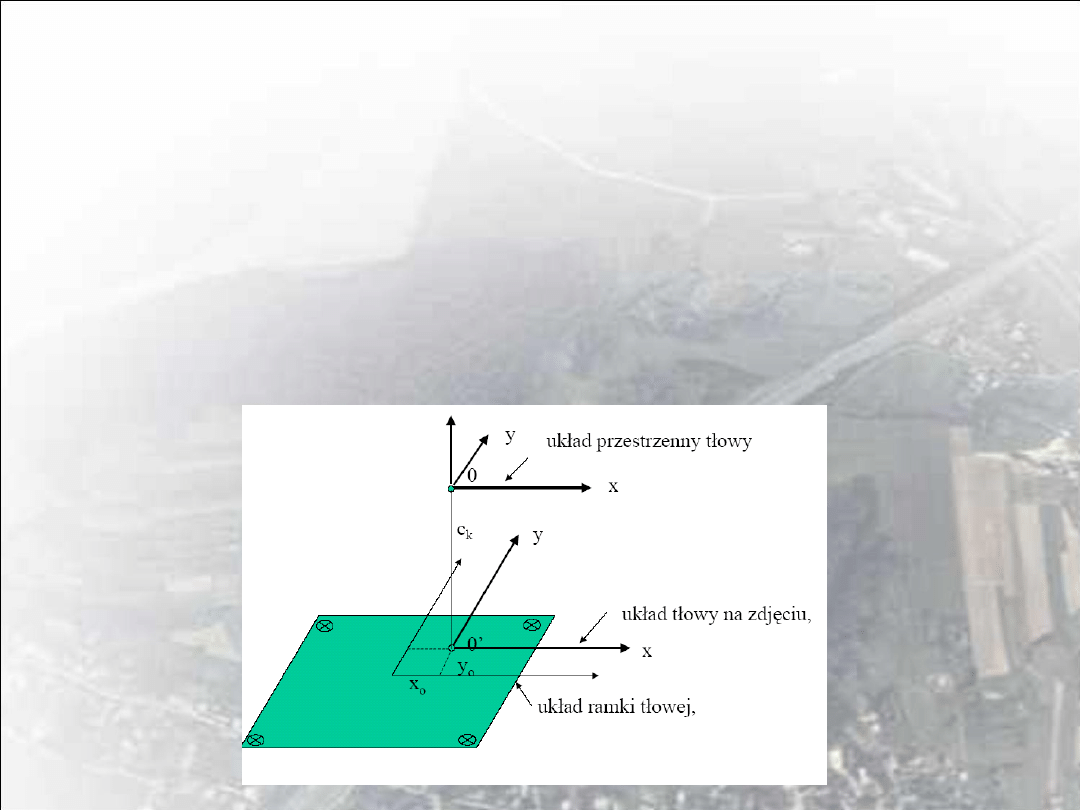
Zdjęcie lotnicze jako rzut środkowy
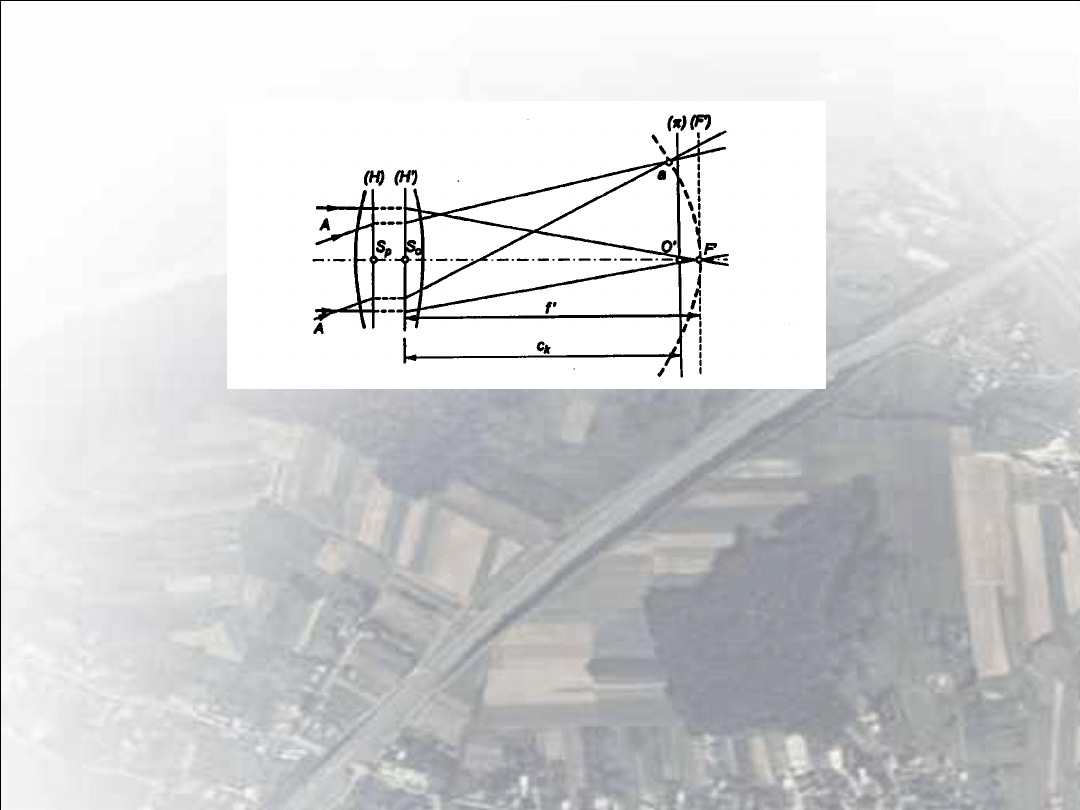
Odległość ogniskowa , a odległość obrazowa kamery c
k
Rys 1 Relacje między ogniskową obiektywu a odległością obrazową
kamery
• Dla kamer lotniczych fotografowanym przedmiotem jest powierzchnia
Ziemi, znajdująca się w odległości, co najmniej kilkuset metrów (dla
obiektywu leżąca praktycznie w nieskończoności). Oznacza to, że
obraz tworzy się w płaszczyźnie ogniskowej kamery (F’).
• W wyniku pozostałości szczątkowych błędów optycznych ostry obraz
utworzy się nie w płaszczyźnie ogniskowej (F’), lecz na pewnej sferze,
stycznej do płaszczyzny ogniskowej w ognisku F’. W kamerach
lotniczych tak dobiera się położenie obiektywu względem płaszczyzny
ramki tłowej (π), że ramka tłowa jest sieczną powierzchni „ najlepszej
ostrości”, a rozkład ostrości na całej powierzchni zdjęcia jest
najkorzystniejszy.

Odległość ogniskowa , a odległość obrazowa kamery c
k
Odległość ramki tłowej (π) od obrazowego środka rzutów O jest
odległością obrazową kamery c
K
(inaczej stałą kamery) i jest ona
nieznacznie mniejsza od ogniskowej obiektywu.
Dla obecnie powszechnie używanego formatu kadru lotniczych
kamer pomiarowych
23x23 cm stosuje się obiektywy:
normalnokątny f ≈ 305 mm, 2β = 55º
półnormalnokątny f ≈ 210 mm, 2β = 70º
szerokokątny f ≈ 153 mm, 2β = 90º
nadszerokokątny f ≈ 88 mm, 2β = 120ºk
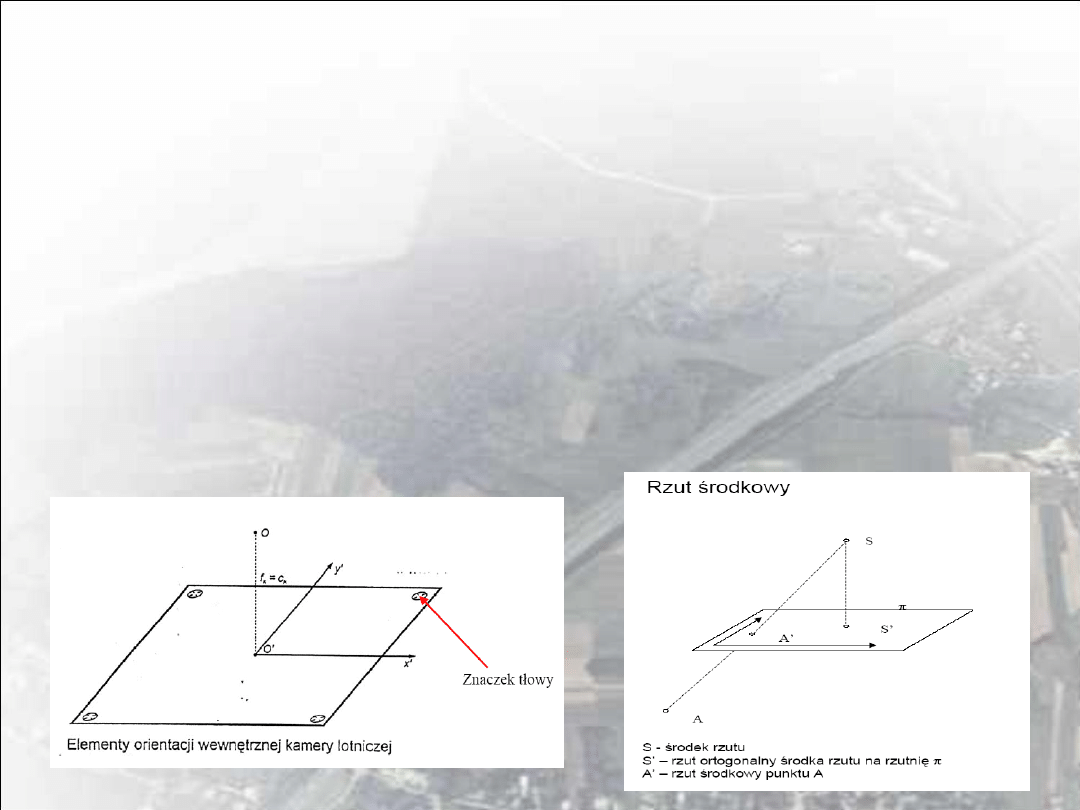
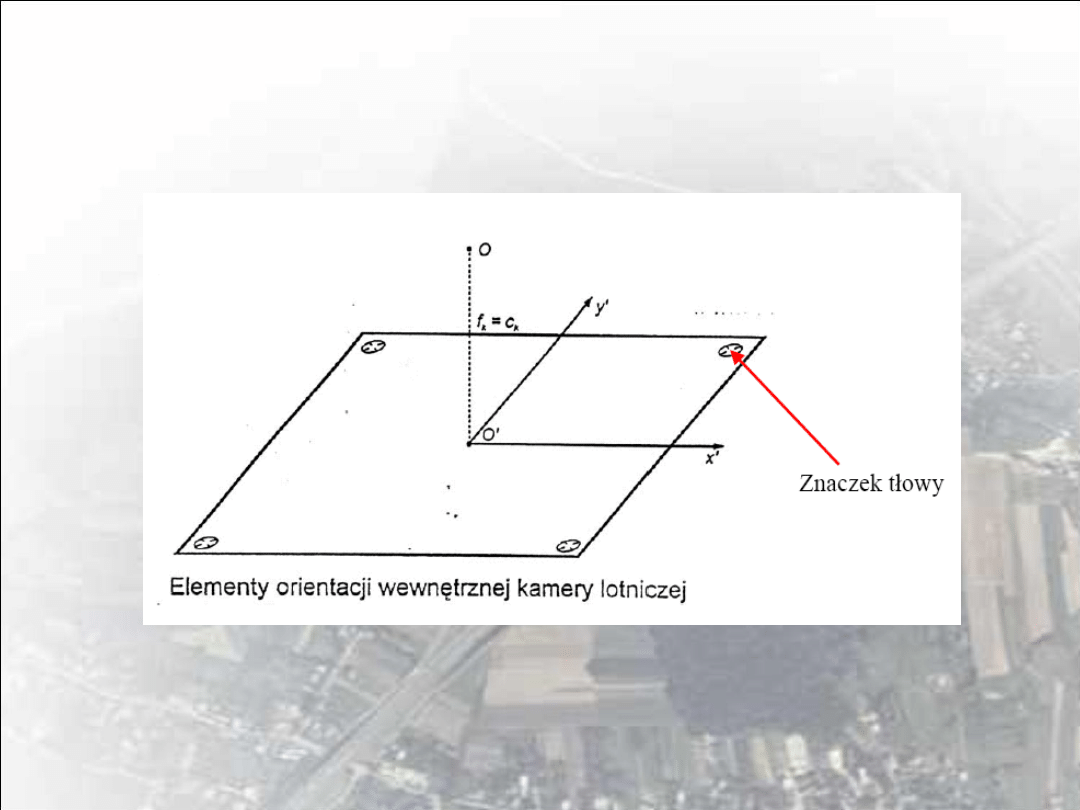
Elementy orientacji wewnętrznej kamery
• Obraz utworzony „idealnym obiektywem” jest rzutem środkowym
przestrzennego obiektu (np. powierzchni Ziemi fotografowanej z
samolotu) na płaszczyznę obrazową.
• Z teorii rzutu środkowego wiadomo, że dla rekonstrukcji wiązki
projekcyjnej potrzebna jest znajomość położenia środka rzutów
względem obrazu (tj. zdjęcia). To położenie wyznaczają:
• położenie tzw. punktu głównego zdjęcia O’, tj. spodka
prostopadłego środka rzutów (obrazowego środka rzutów S
o
) na
płaszczyznę ramki tłowej,
• odległość środka rzutów S od płaszczyzny ramki tłowej, tzw.
odległość obrazowa kamery c
k
(inaczej stała kamery)
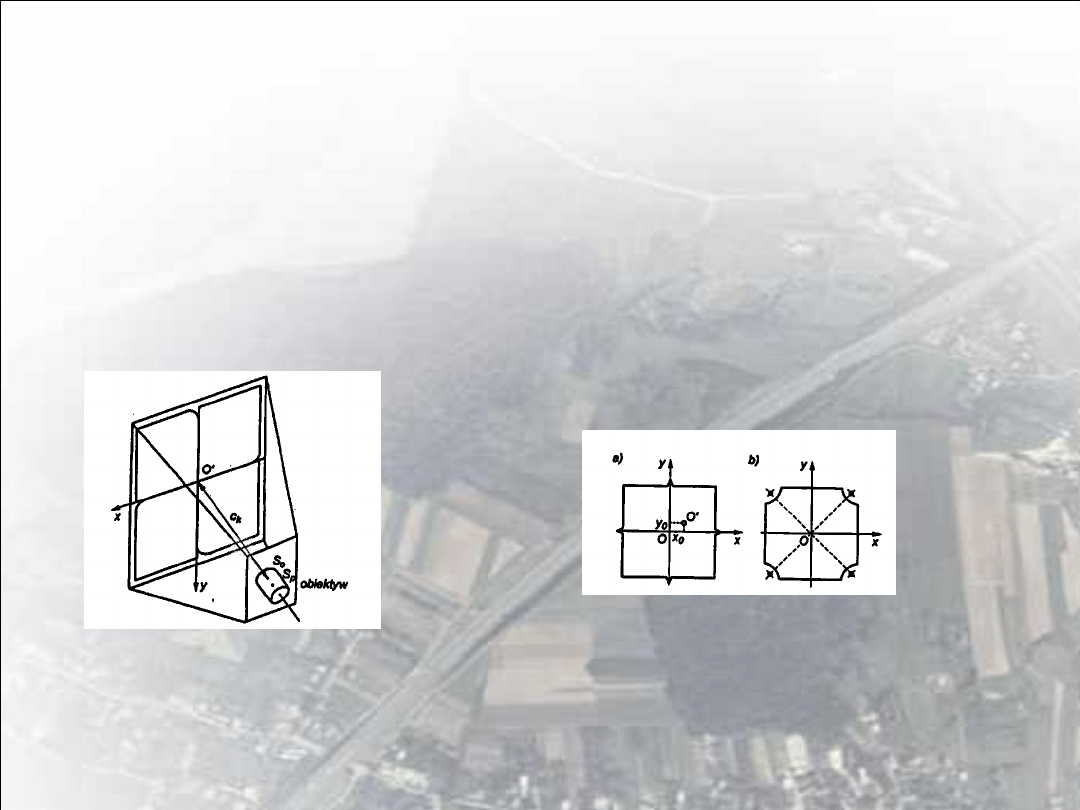
Elementy orientacji wewnętrznej kamery
Wielkości pozwalające na rekonstrukcję wiązki projekcyjnej zdjęcia określają
tzw. elementy orientacji wewnętrznej kamery, do których zaliczamy:
- odległość obrazową kamery c
k
- położenie punktu głównego, określone przez jego współrzędne tłowe x
o
, y
o
Rys. 3 Układ współrzędnych tłowych kamery
Rys. 2 Elementy orientacji wewnętrznej kamery
Elementy orientacji wewnętrznej kamery
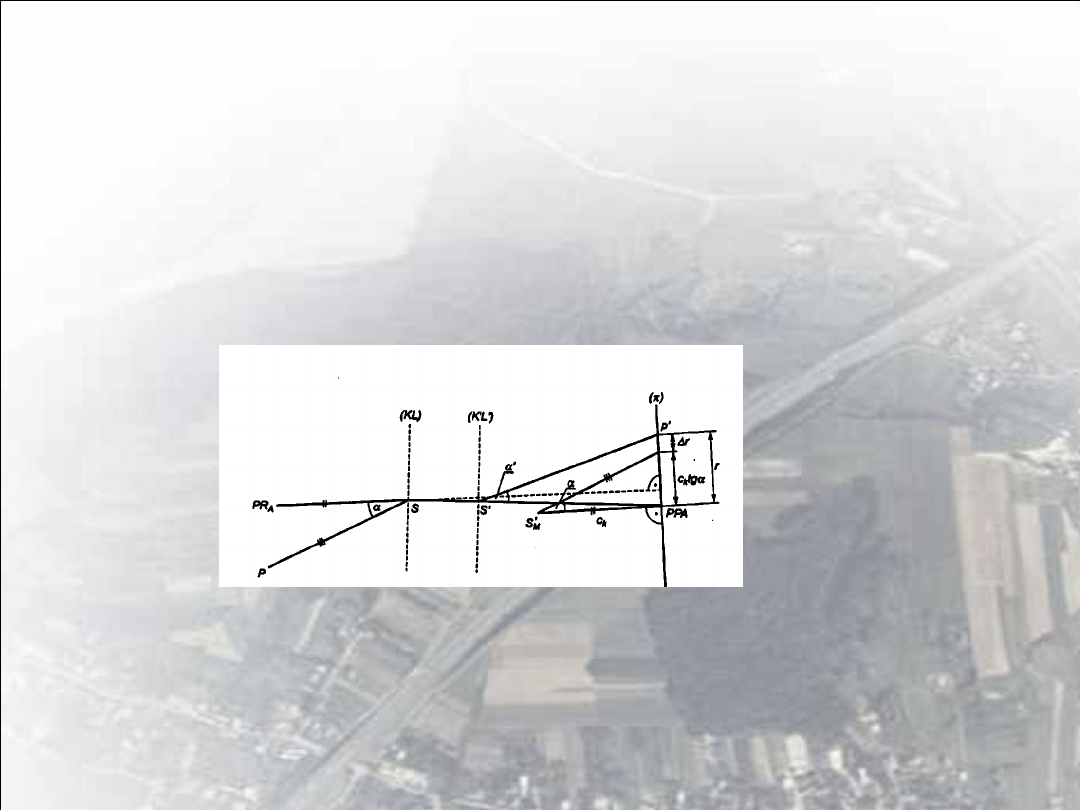
Techniczna definicja elementów orientacji wewnętrznej
kamery
•
Z powodu błędów rzeczywistego obiektywu „model matematyczny”
obiektywu zastępujemy „modelem technicznym”, w którym oś
główną obiektywu zastępuje się autokolimacyjną osią obiektywu
PR
A
(taką, która w przestrzeni przedmiotowej jest prostopadła do
ramki tłowej kamery i przechodzi przez przedmiotowy punkt
węzłowy S). Oś autokolimacyjna po przejściu przez obiektyw
wyznacza punkt główny autokolimacji PPA.
Rys. 4 Elementy orientacji wewnętrznej „realnego obiektywu
PR
A
- autokolimacyjna oś obiektywu,
PPA - punkt główny autokolimacji,
KL, K’L’ – wejściowa i wyjściowa źrenica obiektywu,
S, S’ – przedmiotowy i obrazowy fizyczny środek projekcji,
C
k
– odległość obrazowa, S’
M
– matematyczny środek projekcji
Techniczna definicja elementów orientacji wewnętrznej
kamery
• Ze względu na fakt, że dystorsja radialna nie jest ściśle
symetryczna (jej wartości w danym punkcie zdjęcia zależą nie
tylko od promienia radialnego, ale również od położenia) i jeżeli ta
asymetria jest znacząca, to dąży się do „scentrowania” jej
wykresów przez odniesienie ich nie do punktu głównego
autokolimacji PPA, lecz do punktu najlepszej symetrii PPBS.
Tak określony punktu najlepszej symetrii jest – w dalszych
opracowaniach fotogrametrycznych – traktowany jako punkt
główny.
Zdjęcie lotnicze w skali 1: 5000

Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
Wyszukiwarka
Podobne podstrony:
41 Opracowanie projektu wykonania zdjęć lotniczych (dane do projektu i obliczane parametry
Jakość i właściwości pomiarowe zdjęć lotniczych druk
Wykonawstwo zdjęć lotniczych, Fotogrametria- wykłady sem IV
fotka, sprawozdanie 2, ĆWICZENIE 3: FOTOGRAMETRYCZNA OCENA ZDJĘĆ LOTNICZYCH
40 Analityczne metody opracowania zdjęć lotniczych
Interpretacja zdjęć lotniczych i satelitarnych w ochronie środowiska
Temat 5 Orientacja stereogramu zdjęć lotniczych na autografie cyfrowym VSD
Sprawozdanie 1 Fotogrametryczna ocena bloku zdjęć lotniczych
parametry zdjęc
Jakość i właściwości pomiarowe zdjęć lotniczych druk
Sprawozdanie 6 Analityczne opracowanie pary zdjęć lotniczych (budowa modelu) metodą wiązek przy zast
LOTNICTWO plan, lotnictwo(1)
plan pracy taktyka obserwacja, alarmy lotnicze przygotowanie do natarcia wykonanie natarcia) 08
plan pracy opl Czynności żołnierza po ogłoszeniu alarmu lotniczego ostatnie zmiany 2006 08 21 Bor
Parametry życiowe dla WCEM
Plan marketingowy 1
więcej podobnych podstron