
NAPĘD
ELEKTRYCZNY
Teresa Orłowska-Kowalska,
prof. dr hab. inż.
Zakład Napędów Elektrycznych
www.imne.pwr.wroc.pl/zne
godz. konsultacji: wt.11-13,
czw.11-13

WYKŁAD 15
Metody regulacji
prędkości SI
Sterowanie prędkością
SI
w układach
kaskadowych

Podstawy metody
sterowania
Istota kaskadowej metody regulacji
prędkości SI pierścieniowego – zmiana
poślizgu wirnika.
Przy czym
w układach kaskadowych
moc poślizgu nie jest tracona na
dodatkowej rezystancji,
jak przy
regulacji prędkości za pomocą
dodatkowej rezystancji w obwodzie
wirnika, lecz:
- oddawana w postaci mocy elektrycznej
do sieci –
kaskada stałego momentu
M=const;
- w postaci mocy mechanicznej
oddawana na wał silnika indukcyjnego -
kaskada stałej mocy
P = const.

Podstawy metody
sterowania
W przeszłości
– przetwarzanie
oddawanej przez wirnik mocy czynnej
poślizgu – za pośrednictwem
dodatkowych maszyn prądu stałego lub
przemiennego (
kaskady
elektromaszynowe
) – łączonych z
głównym SI:
• elektrycznie – kaskada M=const;
• elektrycznie i mechanicznie – kaskada
P=const.
Obecnie
– zamiast maszyn pomocniczych
– przekształtniki energoelektroniczne –
kaskady zaworowe.

Podstawy metody
sterowania
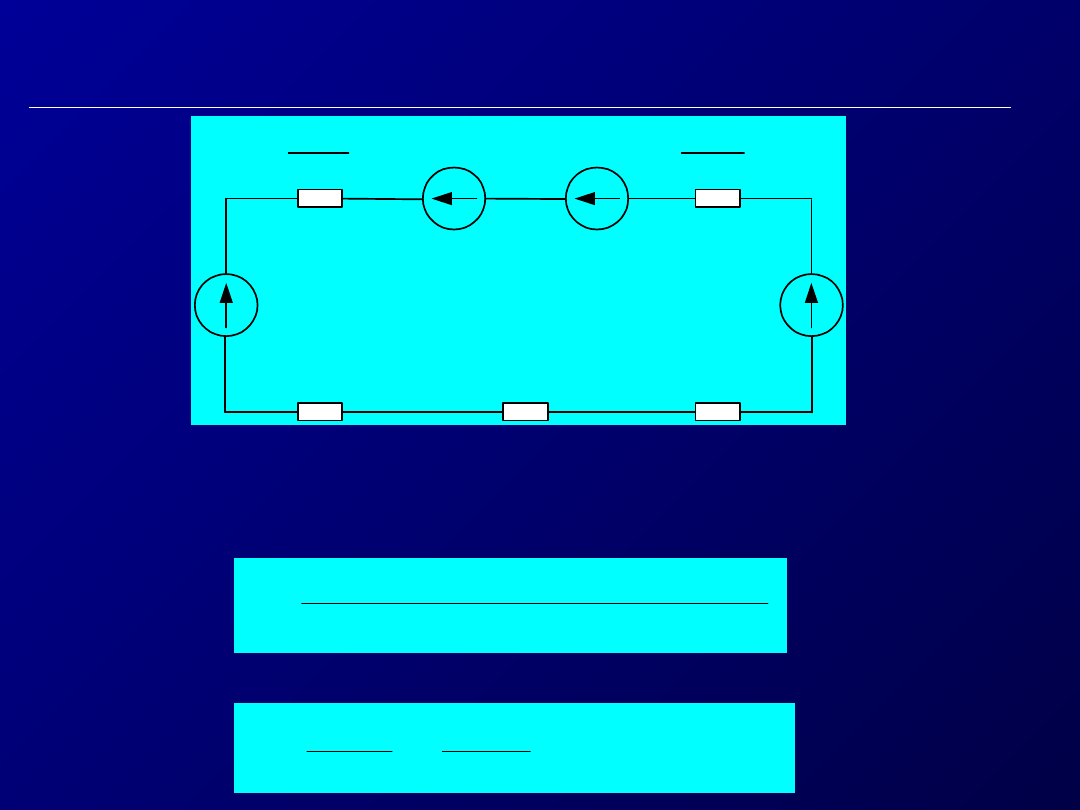
Zasada regulacji prędkości w klasycznym,
maszynowym układzie kaskadowym
polega na
wprowadzeniu do obwodu
wirnika dodatkowej siły
elektromotorycznej E
d
o
częstotliwości równej częstotliwości
SEM wirnika E′
r
.
Zmiana amplitudy
E
d
oraz jej
przesunięcia w fazie względem
E′
r
powoduje zmianę poślizgu s oraz
poprawę współczynnika mocy silnika
cos
.
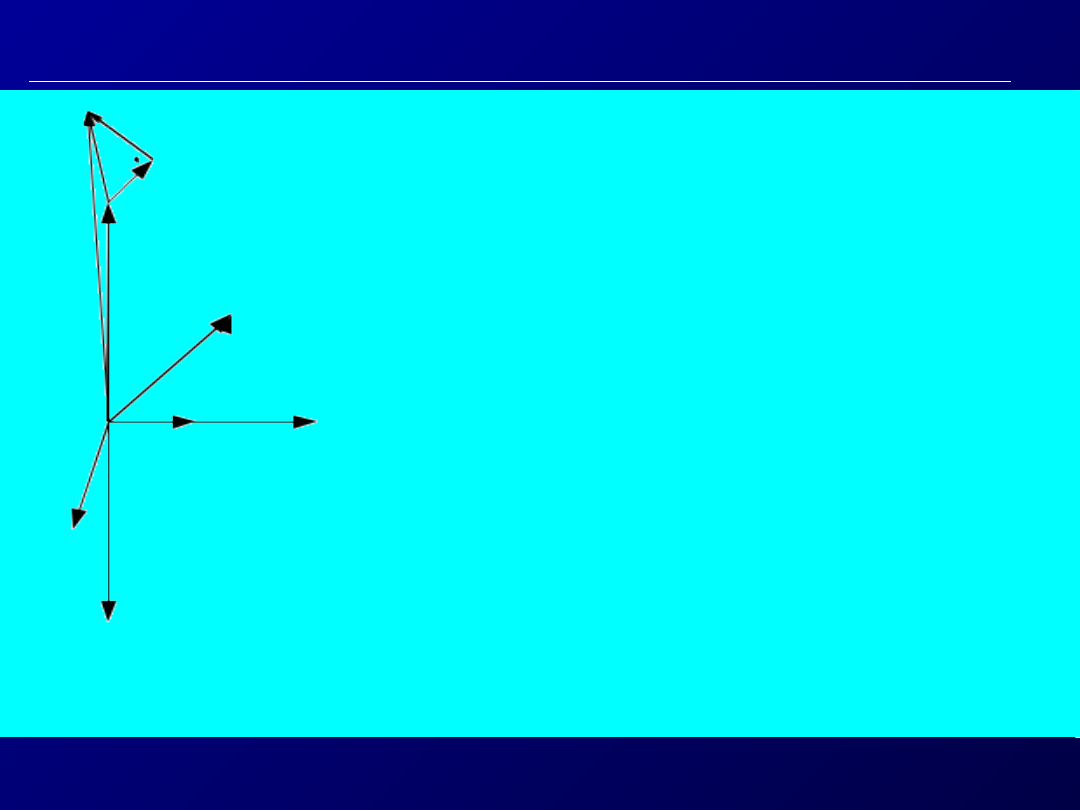
Podstawy metody
sterowania
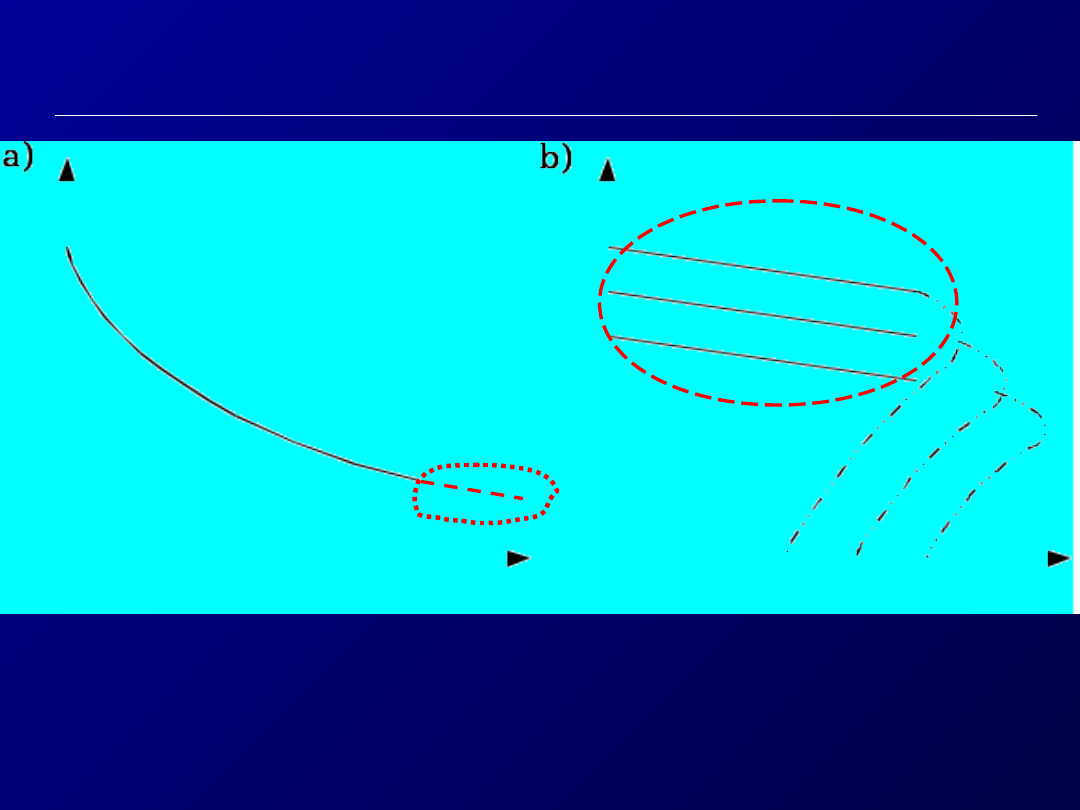
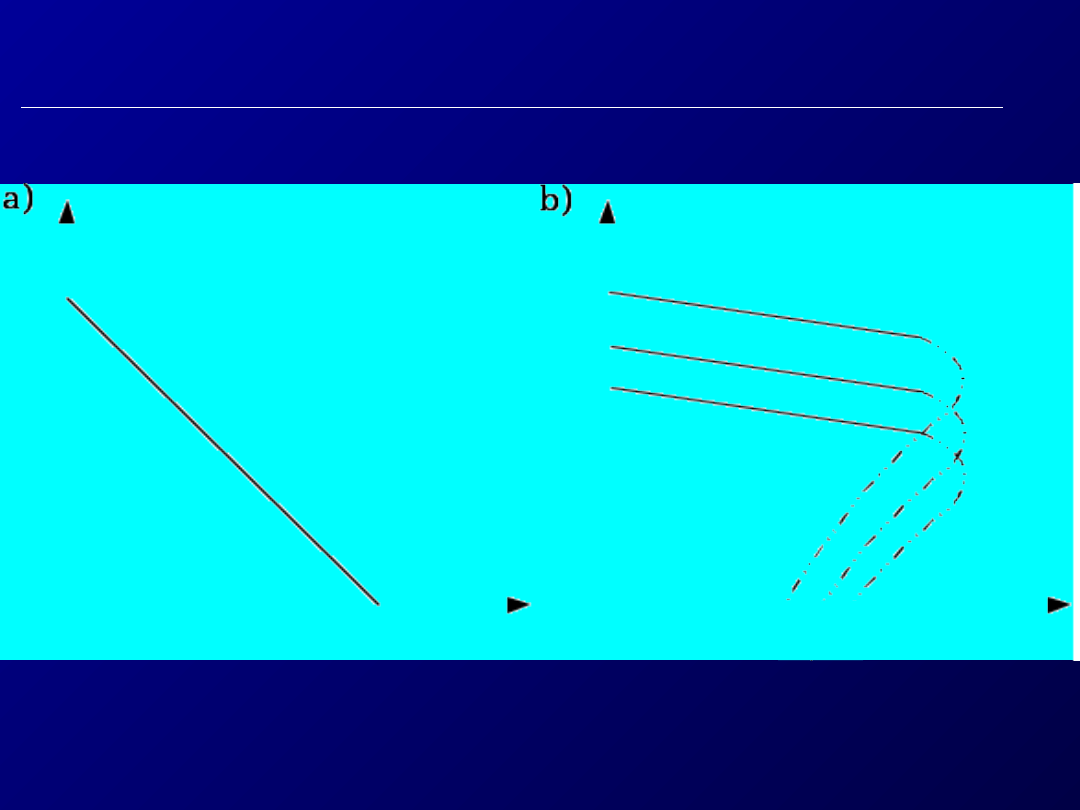
Wykresy wektorowe SI przy różnych SEM Ed w obwodzie wirnika:
a) Ed = 0, b) Ed > 0,
< /2, c) Ed > 0, > /2
Podstawy metody
sterowania
Prąd wirnika SI w trakcie normalnej pracy:
(1)
a po wprowadzeniu dodatkowej SEM E
d
:
(2)
2
2
r
r
ro
r
sX
R
s
E
I
2
2
r
r
d
ro
ed
r
sX
R
E
s
E
I
Podstawy metody
sterowania
Jeżeli regulacja odbywa się przy M
z
=const, to:
Jeżeli
,
to E
da
= - E
d
i w stanie ustalonym
musi być spełniony warunek:
(4)
przy czym z porównania (1) i (2) przy
I
r
=const:
(5)
czyli:
A więc,
po wprowadzeniu dodatkowej SEM E
d
skierowanej przeciwnie do E
r
, poślizg musi
wzrosnąć,
aby przy I
r
=const był spełniony
warunek (4);
a więc prędkość musi zmaleć –
regulacja w dół!
const
I
I
r
ed
r
w
d
ed
r
E
E
s
E
)
(
0
const
E
s
E
s
E
E
d
ed
r
r
w
)
(
0
0
)
(
)
(
ed
ed
s
s
Podstawy metody
sterowania
Jeśli
=0
, to E
da
= +E
d
(skierowana zgodnie z E
r
), to
dla I
r
=const:
(6)
czyli:
A więc, po wprowadzeniu dodatkowej SEM
E
d
skierowanej zgodnie z
E
r
, poślizg musi zmaleć aby przy
I
r
=const był spełniony warunek (4);
a więc prędkość musi wzrosnąć – regulacja w górę!
Jeżeli amplituda , to (6) może być spełnione
tylko dla czyli silnik osiągnie
Wniosek:
w układach kaskadowych możliwe jest
osiągnięcie prędkości kątowej zarówno poniżej
jak i powyżej synchronicznej.
const
E
s
E
s
E
E
d
ed
r
r
w
)
(
0
0
)
(
)
(
ed
ed
s
s
s
E
E
r
d
0
0
ed
s
synchr

Podstawy metody
sterowania
Jeżeli kąt
<
/2 (rys. b), to
wprowadzenie E
d
do obwodu wirnika
powoduje wzrost wypadkowej SEM E
w
.
Przy założeniu stałej wartości
impedancji wirnika ze wzrostem E
w
zwiększy się prąd wirnika I′
r
, a tym
samym moment rozwijany przez silnik,
co doprowadzi do wzrostu prędkości
kątowej układu.
Przy małych kątach
i E
w
>
s
E′
r
równowaga momentu
elektromagnetycznego i oporowego
nastąpi przy ujemnym poślizgu, tj. przy
prędkościach nadsynchronicznych.

Podstawy metody
sterowania
Jeżeli kąt
>
/2 (rys. c), to wypadkowa
SEM E
w
zmniejszy się, prąd I′
r
i moment
zmaleją, co doprowadzi do zmniejszenia
prędkości kątowej silnika.
Przy odpowiednio dobranej wielkości
dodatkowej SEM E
w
i kąta
można
układ napędowy zatrzymać i
przeprowadzić jego nawrót.

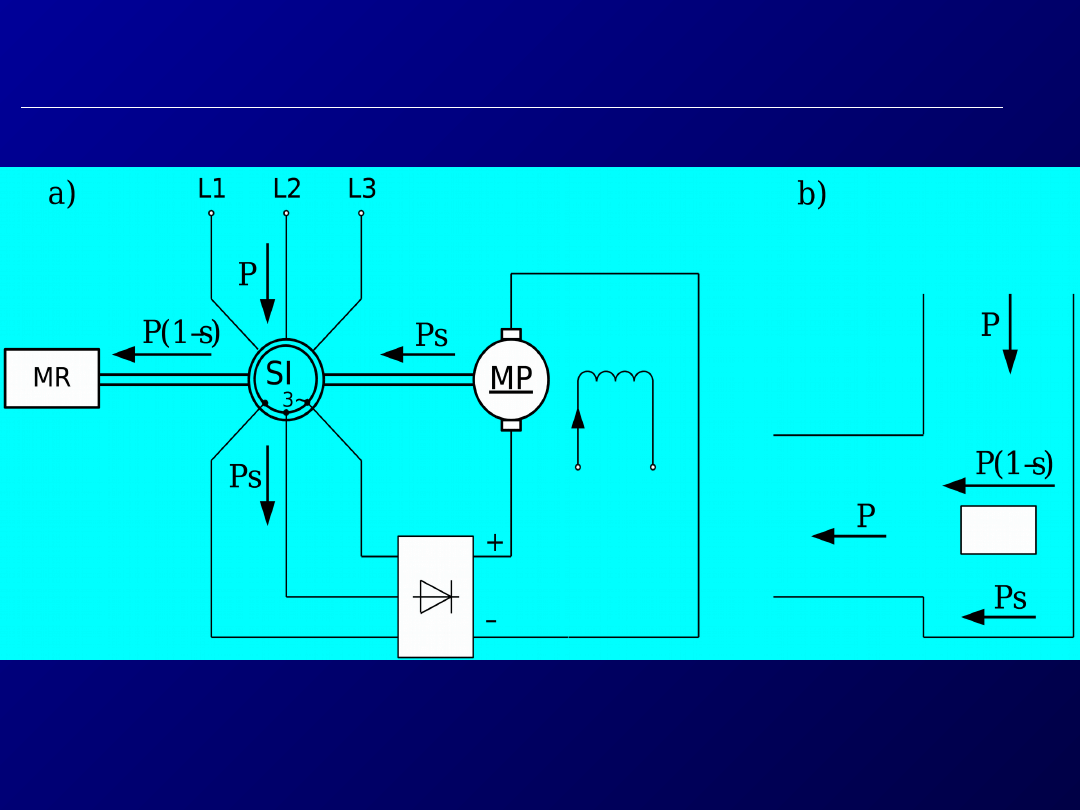
Kaskada
zaworowo – maszynowa
P = const
W kaskadzie zaworowo-maszynowej P
= const SEM E′
r
jest prostowana za
pomocą prostownika niesterowanego i
dodawana jest do niej SEM
obcowzbudnej maszyny prądu stałego
MP, która pracuje na wspólnym wale z
SI pierścieniowym
Wobec tego moc poślizgu nie jest
tracona bezużytecznie, lecz oddawana
na wał SI jako moc mechaniczna.
Kaskada
zaworowo – maszynowa
P = const
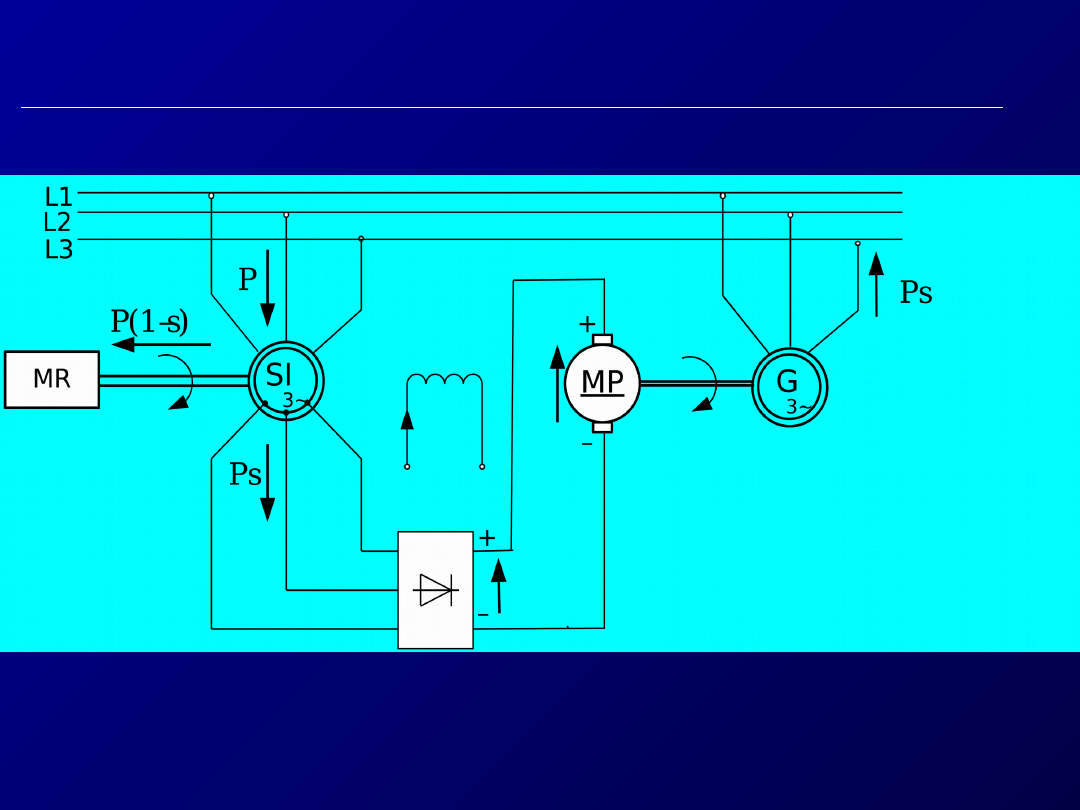
Kaskada zaworowo-maszynowa P = const:
a) schemat ideowy, b) bilans mocy

Kaskada
zaworowo – maszynowa
P = const
Przy pominięciu strat mocy w
układzie napędowym – całkowita moc
el. P pobrana przez SI z sieci jest
zamieniana na P
mech
przekazywaną
do MR – stąd: „kaskada na stałą moc”.
Jeśli:
- P(1 – s) - moc mechaniczna na wale
SI,
- Ps - moc mechaniczna równa mocy
poślizgu – przekazywana przez MP na
wał SI,
to spełniony jest zawsze warunek:
P = P(1 – s) + Ps = P = const.

Kaskada
zaworowo – maszynowa
P = const
Sterowanie prędkością kaskady
zaworowo-maszynowej typu P = const
realizuje się przez
zmianę prądu
wzbudzenia I
w
pomocniczej
obcowzbudnej maszyny prądu stałego
MP
.
Regulując wartość prądu I
w
, zmienia
się wartość strumienia
w
, a tym
samym siłę elektromotoryczną E
M
= E
d
= k
e
w
, czyli SEM dodatkową w
obwodzie prądu stałego.
Kaskada zaworowo – maszynowa P =
const
Średnia
wartość prądu
wyprostowane
go I
d
(w
zakresie pracy
silnikowej –
E
d
=E
M
w
przeciwfazie
z U
d
):
w której:
d
E
D
U
2
s
X
m
z
p
π
2
s
E
k
r
p
0
r
R
2
t
R
s
E
k
U
R
U
E
s
E
k
I
I
r
p
d
z
D
d
r
p
t
d
0
0
,
2
)
6
(
34
,
2
sin
6
p
p
p
p
m
dla
m
m
k
,
2
2
t
r
z
p
z
R
R
s
X
m
R
,
1
2
e
s
r
z
X
X
X
Kaskada
zaworowo – maszynowa
P = const
Po założeniu I
d
= 0 i pominięciu
U
D:
a po uwzględnieniu, że
oraz
stosunek prędkości biegu jałowego
kaskady
0k
do prędkości synchronicznej
0s
SI:
0
0
0
0
:
/
M
k
w
e
M
k
r
p
E
Φ
k
E
s
E
k
s
k
s
k
s
0
0
0
0
,
0
0
M
s
w
e
E
Φ
k
)
1
(
'
'
0
0
0
0
0
0
0
0
0
0
0
s
k
M
r
p
s
k
s
M
r
p
s
k
E
E
k
E
E
k
Kaskada
zaworowo – maszynowa
P = const
Po przekształceniu:
czyli:
-
hiperboliczna funkcja strumienia
wzbudzenia
(prądu wzbudzenia) MP
.
'
0
0
0
0
0
0
0
0
s
w
e
r
p
r
p
M
r
p
r
p
s
k
Φ
k
E
k
E
k
E
E
k
E
k
.
)
'
1
(
'
0
0
0
0
0
0
M
r
p
s
k
M
r
p
E
E
k
E
E
k
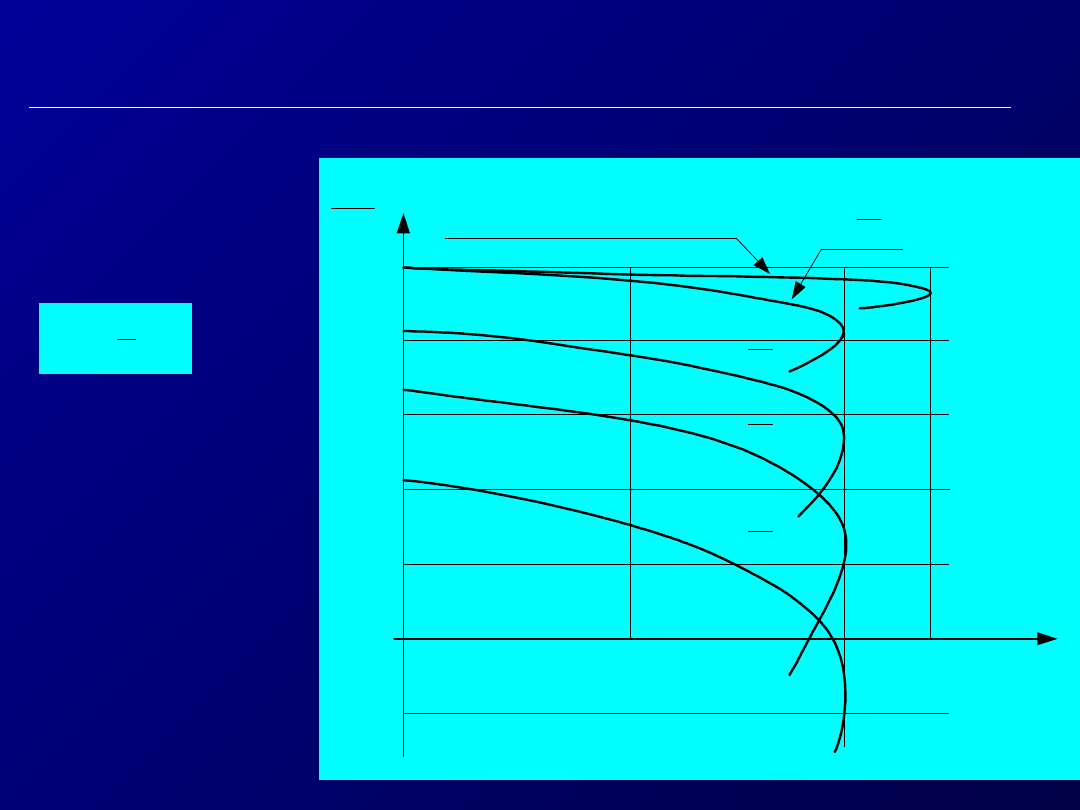
Charakterystyki kaskady P = const:
a) regulacyjna biegu jałowego, b)
mechaniczne
Z przebiegu charakterystyki regulacyjnej wynika, że
w
układzie kaskady P=const nie można doprowadzić
SI do prędkości
= 0.
Charakterystyki mechaniczne w zakresie roboczym
zachowują swój charakter przebiegu, tj. bocznikowy (są
równoległe, M
k
się zmienia).
Kaskada
zaworowo – maszynowa
P = const
Poślizg idealnego biegu jałowego
kaskady można przedstawić w postaci
następującej zależności:
przy czym:
Jeśli przyjąć
0k
= 0,5
0s
,
czyli
s
0k
= 0,5
(
= 1),
to MP powinna być zwymiarowana na moc
znamionową wynikającą z napięcia: E
M0N
= k
p
E′
r0
,
czyli moc MP powinna być
w tym przypadku równa mocy
znamionowej SI.
,
1
0
0
0
0
M
r
p
M
k
E
E
k
E
s
.
0
0
r
p
M
E
k
E

Kaskada zaworowo – maszynowa P
= const
Przy dalszym zwiększeniu zakresu
regulacji bardzo szybko zwiększa się moc
znamionowa MP,
np.:
0k
= 0,4
0s
,
czyli
s
0k
= 0,6 ---
=
1,5 itd.
Wskutek tego w kaskadach zaworowo-
maszynowych typu P=const praca układu
odbywa się w zakresie poślizgów idealnego
biegu jałowego
s
0k
0,5 (
s
N
< 0,5
s
N
).
Za ekonomiczny zakres prędkości
kątowej przyjmuje się przedział
1:1,5
1:2, ze względu na wymagania
dotyczące maszyny pomocniczej prądu
stałego.

Kaskada stałej mocy P =
const
Układy kaskadowe typu P = const
stosuje się zatem
w napędach wielkich
mocy
, w których zachodzi potrzeba
ciągłej zmiany prędkości kątowej w
małym zakresie , np. napędy pomp i
wentylatorów, których moment
mechaniczny obciążenia zmienia się z
kwadratem prędkości kątowej.
Moc maszyny pomocniczej dobiera się
(na ogół) według kryterium
maksymalnej mocy poślizgowej
występującej podczas regulacji
prędkości kątowej kaskady.
Kaskada zaworowo – maszynowa
M = const
Kaskada zaworowo-maszynowa typu M =
const
Kaskada zaworowo – maszynowa M
= const
Moment na wale silnika kaskady przy
różnych prędkościach jest stały
(pomijając straty mocy):
Dla
oraz (bieg jałowy):
czyli:
const
1
1
0
0
eN
s
s
m
M
P
s
s
P
P
M
,
,
0
0
0
M
w
e
M
M
k
r
p
Φ
k
E
E
s
E
k
0
t
d
I
I
0
0
'
r
p
M
w
e
k
E
k
k
s
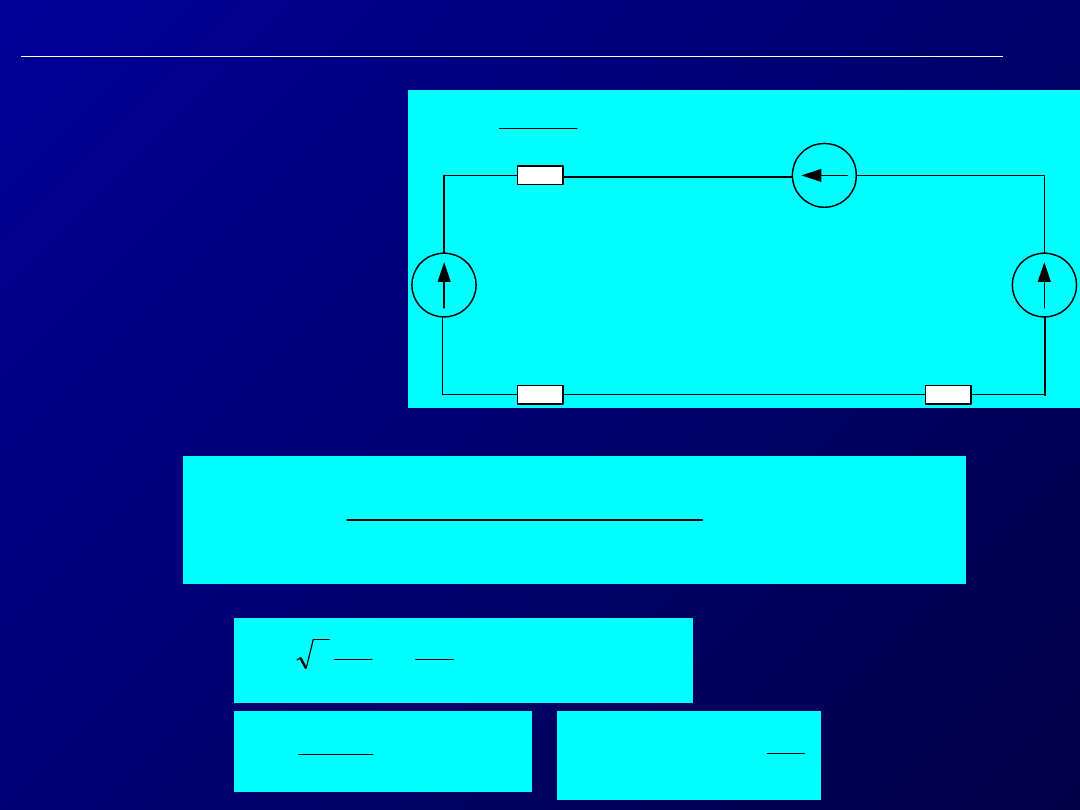
Kaskada zaworowo – maszynowa M
= const
Ponieważ:
to:
-charakterystyka regulacyjna ma przebieg
prostoliniowy
(dla
M
=const)
i możliwe jest
doprowadzenie prędkości SI do zera!
Jednak, podobnie jak w układzie P=const,
zakres regulacji od dołu jest ograniczony
wartością mocy MP, od góry – minimalną
wartością poślizgu s.
,
1
,
0
0
0
0
0
0
0
k
s
k
s
k
s
k
s
s
.
0
0
0
0
r
p
M
w
e
r
p
s
k
E
k
Φ
k
E
k
Charakterystyki kaskady M= const:
a) regulacyjna biegu jałowego, b)
mechaniczne
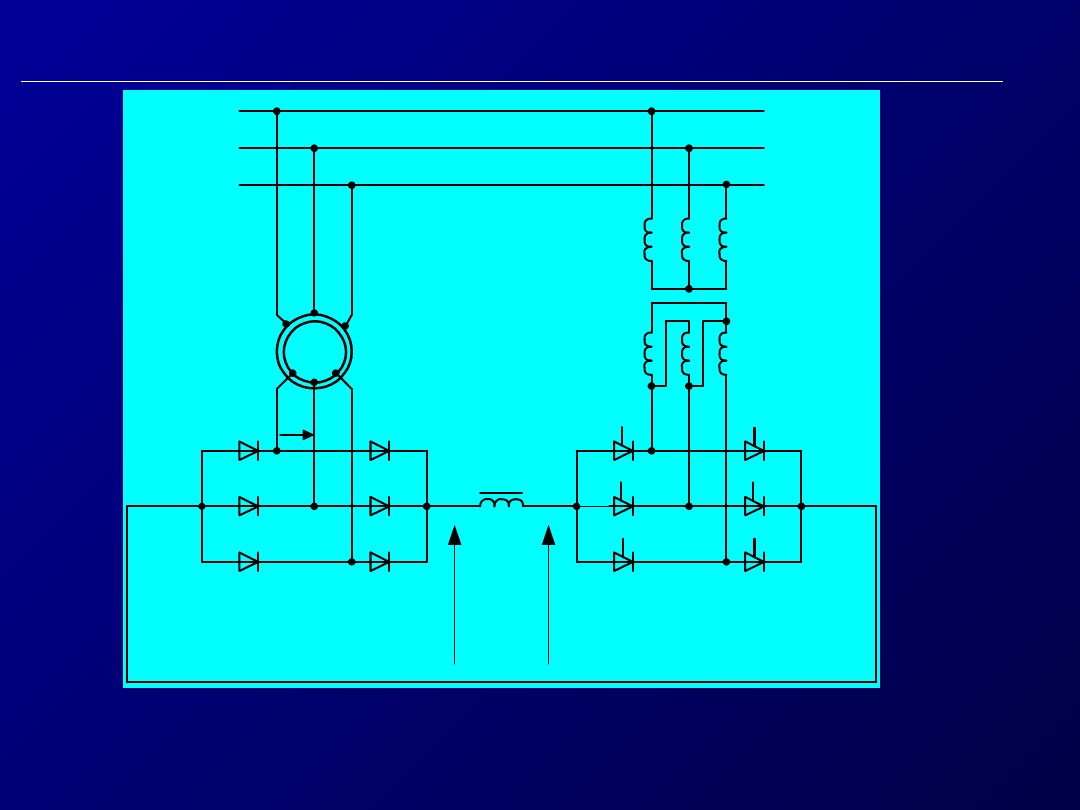
Kaskada zaworowa M =
const
d
U
dw
U
PW
~
M
L
PS
T
2
U
1
L
3
L
2
L
Prostownik sterowany PS zasilany z sieci, pracuje w zakresie
pracy falownikowej. Transformator dopasowujący T -
dopasowanie napięcia strony wtórnej do napięcia równego
napięciu wirnika.
Kaskada zaworowa M =
const
Przekładnię transformatora
dopasowującego przy zastosowaniu
przekształtników o identycznej liczbie
pulsów m
p
= 6 można określić wzorem:
w którym: U
1
– napięcie zasilające
transformator dopasowujący, U
rN
–
napięcie znamionowe wirnika, s
max
–
maksymalny poślizg silnika przy
minimalnym kącie wysterowania
tyrystorów
min
.
,
cos
max
min
1
s
U
U
rN

Kaskada zaworowa M =
const
Moc poślizgu sP silnika
pierścieniowego przekazywana jest do
sieci zasilającej przez prostownik
niesterowany, pośredni obwód prądu
stałego, przekształtnik sieciowy PS
i transformator T.
W obwodzie pośrednim prądu stałego
zastosowany jest dławik o dużej
indukcyjności L, który zapewnia
ciągłość prądu w obwodzie oraz
ograniczenie wyższych harmonicznych
prądu.

Kaskada zaworowa M =
const
Zbyt duża indukcyjność dławika
powoduje jednak wzrost stałej
czasowej układu napędowego, a także
zwiększenie strat w samym dławiku.
Przyjmuje się, że wartość
indukcyjności dławika powinna
wynosić: L = 4
5L
2
, gdzie L
2
–
indukcyjność dwóch faz wirnika silnika
pierścieniowego.
Schemat zastępczy obwodu prądu stałego
kaskady tyrystorowej M = const
Wartość prądu I
d
w obwodzie
pośrednim można określić z
zależności:
w której:
cos
0
d
E
2
T
p
X
m
D
U
2
w
U
2
s
X
m
z
p
2
s
E
r0
r
R'
2
dt
R
T
R
2
,
2
2
2
dl
T
r
T
p
z
p
z
R
R
R
X
m
s
X
m
R
,
2
cos
0
0
Z
D
PW
d
r
d
R
U
U
E
s
E
I

Kaskada zaworowa M =
const
przy czym:
E
r0
= 1,35 E′
r0
– dla prostownika
PW,
E
d0
= 1,35 E
2T
– dla przekształtnika
PS,
E′
r0
, E
2T
– SEM wirnika oraz
napięcie fazowe uzwojenia wtórnego
transformatora,
U
PW
,
U
D
– spadki napięcia na
zaworach prostownika sterowanego i
niesterowanego,
R′
r
, R
T
, X
z
, X
T
– odpowiednio
rezystancje i reaktancje faz silnika
oraz transformatora, sprowadzone do
obwodu wirnika.

Kaskada zaworowa M =
const
Dla prędkości silnika
= 0 (s = 1) średnia
wartość napięcia na wyjściu prostownika PW
E
d max
= 1,35 E′
r0
= E
r0
,
natomiast przy dowolnej prędkości silnika
E
d
= s·1,35 E′
r0
= s·E
r0
.
Jeżeli napięcie: E
d
= E
d
, to prąd w
obwodzie pośrednim
I
d
= 0.
Także prąd wirnika silnika I
r
= 0 i wówczas
SI nie rozwinie momentu.
Stan ten odpowiada idealnemu biegowi
jałowemu silnika.
Kaskada zaworowa M =
const
Pomijając spadki napięcia na
zaworach, można przyjąć, że poślizg
idealnego biegu jałowego kaskady
skąd
Jeżeli:
to prędkość idealnego biegu jałowego
kaskady odpowiadająca poślizgowi s
0k
gdzie
0s
– prędkość synchroniczna silnika.
,
cos
0
max
0
d
d
k
E
E
s
.
cos
max
0
0
d
d
k
E
E
s
,
1
0
0
0
k
s
k
s
,
cos
1
max
0
0
0
d
d
s
k
E
E

Kaskada zaworowa M =
const
A więc po zmianie wartości napięcia E
d
poprzez zmianę wysterowania
tyrystorów przekształtnika PS (kąt
)
można uzyskać różne prędkości
idealnego biegu jałowego kaskady.
Dla kąta
= 90
(E
d
= 0) uzyskuje się
największą wartość prędkości silnika
kaskady.
Wzrostowi kąta wysterowania
odpowiada zmniejszanie się prędkości
silnika w układzie kaskadowym.
Maksymalny poślizg silnika w układzie
kaskady zależy od napięcia strony
wtórnej transformatora
dopasowującego U
T0
.
Kaskada zaworowa M =
const
Moment elektromagnetyczny silnika w
układzie kaskady można wyrazić
wzorem:
w którym
Moment krytyczny SI w układzie
kaskadowym określony jest wzorem
(przy pominięciu wyższych
harmonicznych prądu):
w którym M
k
– moment krytyczny
silnika.
,
0
2
0
0
2
0
s
s
R
R
E
M
z
z
r
e
.
2
3
3
0
0
dl
T
r
T
z
z
R
R
R
X
s
X
R
,
3
k
kk
M
M
Charakterystyka mechaniczna kaskady
zaworowej M = const
W wyniku
oddziaływani
a
harmoniczny
ch
W
praktycznyc
h układach
obniżenie
momentu
krytycznego
może
dochodzić
do 17%.
.
3
k
kk
M
M
s
0
12
6
Charakterystyka naturalna
12
7
12
8
12
10
1,0
0,8
0,6
0,4
0,2
–0,2
M
k
M
kk
M
N
M

Kaskada zaworowa M =
const
Sztywność charakterystyk
mechanicznych silnika indukcyjnego w
kaskadzie jest mniejsza niż jego
charakterystyki naturalnej i maleje
wraz ze zmniejszeniem prędkości.
Przyczyną zwiększonego nachylenia są
dodatkowe rezystancje dławika i
transformatora wprowadzone do
obwodu wirnika.
Wraz z obniżeniem prędkości rośnie
ponadto udział reaktancji (sX
z
), co
powoduje dodatkowe pogorszenie
sztywności charakterystyk
mechanicznych.

39
Zalety sterowania SI w układzie
kaskady zaworowej M=const
• Płynna regulacja prędkości kątowej
• Szeroki zakres regulacji
• Liniowość charakterystyk
mechanicznych
• Możliwość sterowania prędkością
napędów grupowych oraz
indywidualnych
• Wysoka sprawność napędu (wraz z
PCz)

Dziękuję za uwagę
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
Wyszukiwarka
Podobne podstrony:
WYKŁAD 14 Regulacja czestotliwosciowa SI
WYKŁAD 14 Regulacja czestotliwosciowa SI
wyklad 15 chemiczne zanieczyszczenia wod 2
WYKŁAD 7 Szeregowy regulacja hamowanie
Wykład 1 15
wykład 15 bezrobocie 2013
Wykład 15, Psychiatria UMP
WYKŁAD 15 - FARMAKOLOGIA leki moczopędne, farmacja, farmakologia
10 Wykład (15 12 2010)
Łączność Wyklad 15
2011 01 09 WIL Wyklad 15 (1)
automatyka i sterowanie wyklad 15
Z Wykład 15.03.2008, Zajęcia, II semestr 2008, Analiza matematyczna
Prawo cywilne I wykład 15
OWI Wykład 2 (15 10 2011)
wyklad 15 5.03.2008, wyklady - dr krawczyk
Psychologia społeczna wykłady 15
więcej podobnych podstron