
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
1
VI. WYMAGANIA DLA
UKŁADÓW AUTOMATYKI

prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
2
W zastosowaniach praktycznych układom
automatyki stawiane są następujące
wymagania:
- zapewnienia odpowiedniego
zapasu
stabilności
- osiągnięcia właściwej
jakości regulacji
w
stanach przejściowych
- nie przekroczenia dopuszczalnego
uchybu
ustalonego
.

prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
3
Do analizy
stabilności
liniowych układów
automatyki wykorzystuje się:
kryterium analityczne Hurwitza,
kryterium graficzne Nyquista.
Do oceny
jakości regulacji
w stanie
przejściowym stosuje się:
parametry odpowiedzi skokowej,
wskaźnik regulacji,
kryteria całkowe.
Do określenia
uchybu ustalonego
regulacji
służy twierdzenie o wartości końcowej
przekształcenia Laplace’a.

prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
4
Stabilność wyraża własność pozostawania
rozwiązań równań różniczkowych opisujących
układ dynamiczny w określonym obszarze
ograniczonym.
Układ sterowania jest
stabilny
, jeżeli po
wytrąceniu ze stanu równowagi sam wraca do
stanu poprzedniego.
Pojęcie to odnosi się zarówno do zamkniętych
jak i otwartych liniowych układów sterowania.
O stabilności układu sterowania można
wnioskować na podstawie równania
różniczkowego, opisującego związek między
wielkością wyjściową y(t) a wejściową x(t).
ZAPAS STABILNOŚCI

prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
5
Dokonując przekształcenia Laplace'a równania
różniczkowego można wyznaczyć transformatę
odpowiedzi układu Y(s) w postaci:
Wielomian M(s) w mianowniku transmitancji G(s)
określa właściwości dynamiczne tego układu i
nazywa się
wielomianem
charakterystycznym
.
s
X
s
M
s
L
s
X
s
a
s
b
s
X
s
G
s
Y
l
n
0
l
l
k
m
0
k
k
m
0
k
k
k
k
n
0
l
l
l
l
dt
x
d
b
dt
y
d
a
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
6
Rozwiązanie równania różniczkowego,
stanowiące odpowiedź układu sterowania, jest
sumą składowej wymuszonej y
w
(t) i składowej
przejściowej y
p
(t):
y(t)= y
w
(t) +
y
p
(t)
Składowa wymuszona jest określona przez
parametry układu oraz przebieg wymuszenia i
nie musi być brana pod uwagę przy badaniu
stabilności układu.
O tym czy układ nadąża za zmianami wielkości
sterującej, decyduje przebieg składowej
przejściowej, zależny od właściwości
dynamicznych układu.
Badanie stabilności układu sterowania można
zatem ograniczyć do analizy składowej
przejściowej, która jest rozwiązaniem
jednorodnego równania różniczkowego badanego
układu.
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
7
Przebieg składowej przejściowej jest określony
przez
równanie charakterystyczne
, które
otrzymuje się poprzez przyrównanie wielomianu
charakterystycznego do zera:
M(s) = a
n
s
n
+ a
n-1
s
n-1
+ ... + a
1
s +
a
o
= 0
Jeżeli pierwiastki równania charakterystycznego
s
i
są jednokrotne, to składowa przejściowa
wyraża się kombinacją liniową funkcji
wykładniczych:
n
0
i
t
s
i
p
i
e
c
t
y
Na przebieg składowej przejściowej i stabilność
układu sterowania ma wpływ położenie
pierwiastków równania charakterystycznego s
i
na
płaszczyźnie zmiennej zespolonej.
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
8
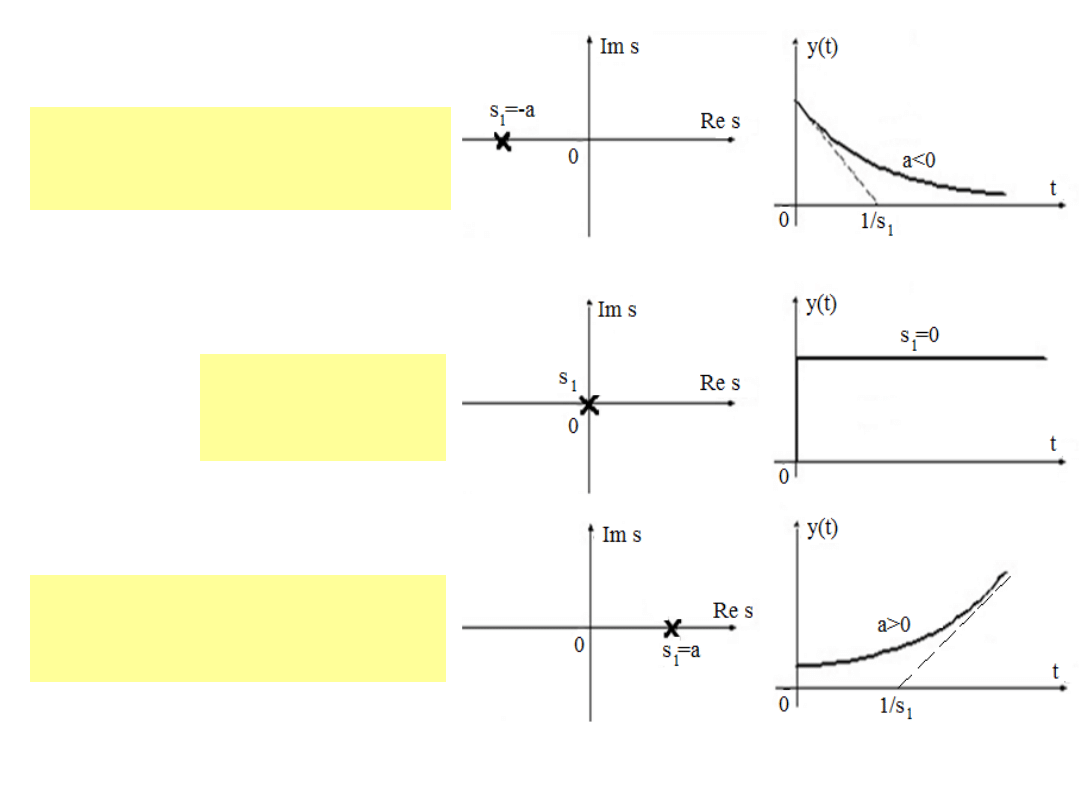
Pierwiastki rzeczywiste:
t
przy
0
e
c
t
y
a
s
at
1
p
1
t
przy
e
c
t
y
a
s
at
1
p
1
1
t
0
1
p
1
c
e
c
t
y
0
s
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
9
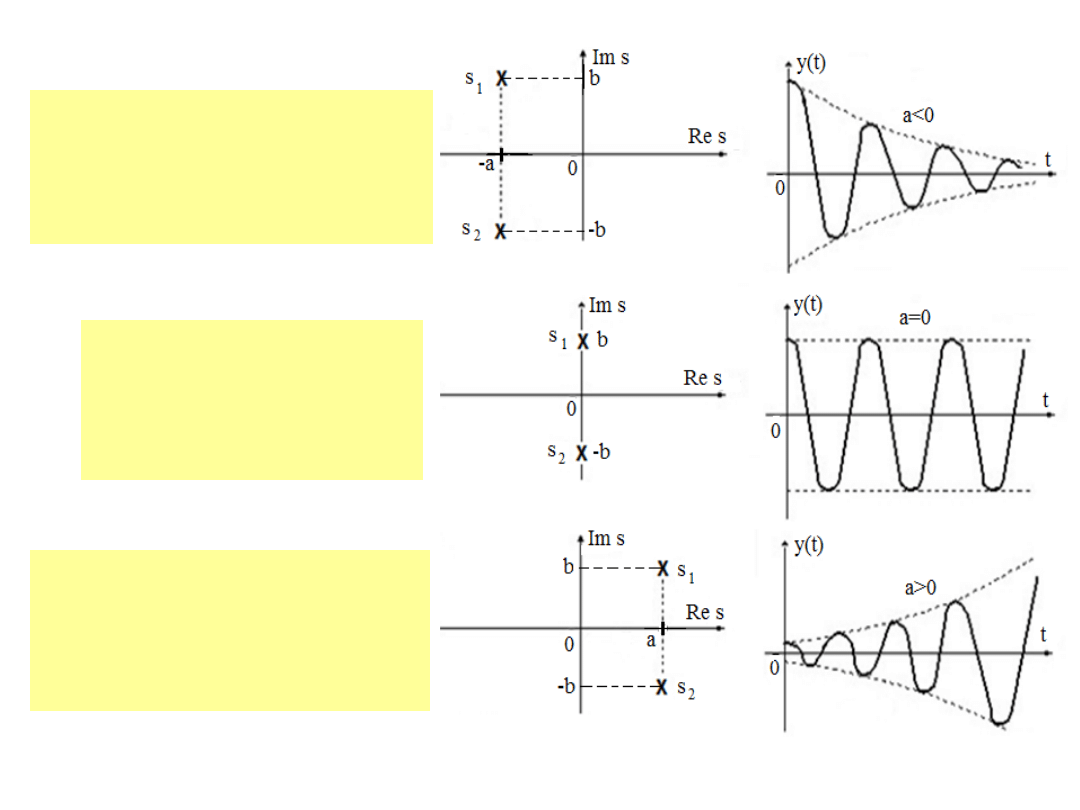
Pierwiastki zespolone:
bt
cos
e
c
e
c
e
c
t
y
jb
a
s
at
t
jb
a
2
t
jb
a
1
p
2
,
1
bt
cos
e
c
e
c
e
c
t
y
jb
a
s
at
t
jb
a
2
t
jb
a
1
p
2
,
1
bt
cos
c
e
c
e
c
t
y
jb
s
jbt
2
jbt
1
p
2
,
1

prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
10
Aby procesy przejściowe zanikały, czyli żeby
badany układ był
stabilny
, wszystkie pierwiastki
rzeczywiste muszą być ujemne, a zespolone mieć
ujemną część rzeczywistą.
Jeżeli chociażby jeden z pierwiastków równania
charakterystycznego ma dodatnią część
rzeczywistą, to układ sterowania jest
niestabilny
.
W przypadku, w którym istnieją pierwiastki
jednokrotne o części rzeczywistej równej zeru,
układ znajduje się na
granicy stabilności
.
Przy czym dla pierwiastków rzeczywistych
odpowiedź jest aperiodyczna, a dla pierwiastków
zespolonych odpowiedź układu ma charakter
oscylacyjny.
Koniecznym i dostatecznym warunkiem
stabilności asymptotycznej (układ wraca
do poprzedniego stanu ustalonego) jest
aby Re(s
i
)<0
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
11
Liniowy układ sterowania jest stabilny
jeżeli wszystkie pierwiastki równania
charakterystycznego mają część
rzeczywistą mniejszą od zera, czyli leżą w
lewej półpłaszczyźnie zmiennej zespolonej
s.
Twierdzenia, pozwalające ocenić stabilność bez
obliczania pierwiastków równania
charakterystycznego układu (biegunów),
nazywane są
kryteriami stabilności
.
Wyróżnia się:
• kryteria analityczne, np. Hurwitza lub Routha
• kryteria graficzne częstotliwościowe, np.
Nyquista
• kryteria grafo-analityczne, np. Michajłowa.
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
12
Określa warunki, jakie powinny spełniać
współczynniki równania charakterystycznego,
aby pierwiastki tego równania miały ujemne
części rzeczywiste.
Kryterium Hurwitza
Adolf Hurwitz (1859-1919)
Niemiecki matematyk.
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
13
Układ automatyki jest stabilny tylko wówczas,
Układ automatyki jest stabilny tylko wówczas,
gdy współczynniki równania charakterystycznego
gdy współczynniki równania charakterystycznego
M(s)=a
M(s)=a
n
n
s
s
n
n
+ a
+ a
n-1
n-1
s
s
n-1
n-1
+ ... + a
+ ... + a
1
1
s + a
s + a
0
0
= 0
= 0
układu zamkniętego
układu zamkniętego
: (a
: (a
n
n
, a
, a
n-1
n-1
, ..., a
, ..., a
0
0
)
)
oraz podwyznaczniki W
oraz podwyznaczniki W
1
1
, W
, W
2
2
, ... ,W
, ... ,W
n-1
n-1
wyznacznika Hurwitza W
wyznacznika Hurwitza W
n
n
są większe od zera.
są większe od zera.
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
14
0
...
...
...
...
a
a
...
a
a
W
...
0
a
a
a
a
W
0
a
W
...
...
...
...
...
...
...
a
a
0
...
...
a
a
a
...
...
a
a
a
W
2
n
n
3
n
1
n
1
n
2
n
n
3
n
1
n
2
1
n
1
2
n
n
4
n
2
n
n
5
n
3
n
1
n
n

prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
15
W przypadku, gdy układ jest niestabilny,
kryterium Hurwitza nie pozwala określić liczby
pierwiastków równania charakterystycznego
leżących w prawej półpłaszczyźnie zmiennej
zespolonej s.
Kryterium Hurwitza nie pozwala określić zapasu
stabilności, ale umożliwia znalezienie wartości
parametrów układu automatyki przy których
będzie stabilny, np. wartości nastaw regulatora.
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
16
Przykład
Transmitancja układu otwartego ma postać:
Należy wyznaczyć graniczną wartość
współczynnika wzmocnienia k, taką aby układ
zamknięty był stabilny dla: T
1
= 5 sek, T
2
= 2
sek, T
3
= 1,4 sek
s
T
1
s
T
1
s
T
1
k
s
G
3
2
1
o
Transmitancja układu
zamkniętego:
Równanie charakterystyczne układu:
T
1
T
2
T
3
s
3
+(T
1
T
2
+T
1
T
3
+T
2
T
3
)s
2
+(T
1
+T
2
+T
3
)s+1+k = 0
k
s
T
1
s
T
1
s
T
1
k
s
G
3
2
1
z
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
17
stąd k > -1, zaś w praktyce k >
0
Wyznacznik Hurwitza:
gdzie:
a
3
= T
1
T
2
T
3
> 0 a
2
= T
1
T
2
+ T
1
T
3
+ T
2
T
3
> 0
a
1
= T
1
+ T
2
+ T
3
> 0 a
0
= 1+k > 0
W
1
= a
2
= 5 · 2 + 2 · 1.4 + 1.4 · 5= 19.8 > 0
W
2
= a
2
a
1
- a
0
a
3
= 19.8 · 8.4 - 14(1 + k) > 0
K< 10.88
Układ zamknięty będzie stabilny dla:
0 < k < 10.88
0
2
1
3
0
2
3
a
a
0
0
a
a
0
a
a
W
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
18
Kryterium Nyquista
Kryterium pozwala określić zapas stabilności
układu zamkniętego na podstawie
charakterystyki amplitudowo-fazowej (wykresu
Nyquista)
układu otwartego.
Harry Nyquist (1889-1976)
Amerykański fizyk i inżynier telekomunikacji
pochodzenia szwedzkiego.
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
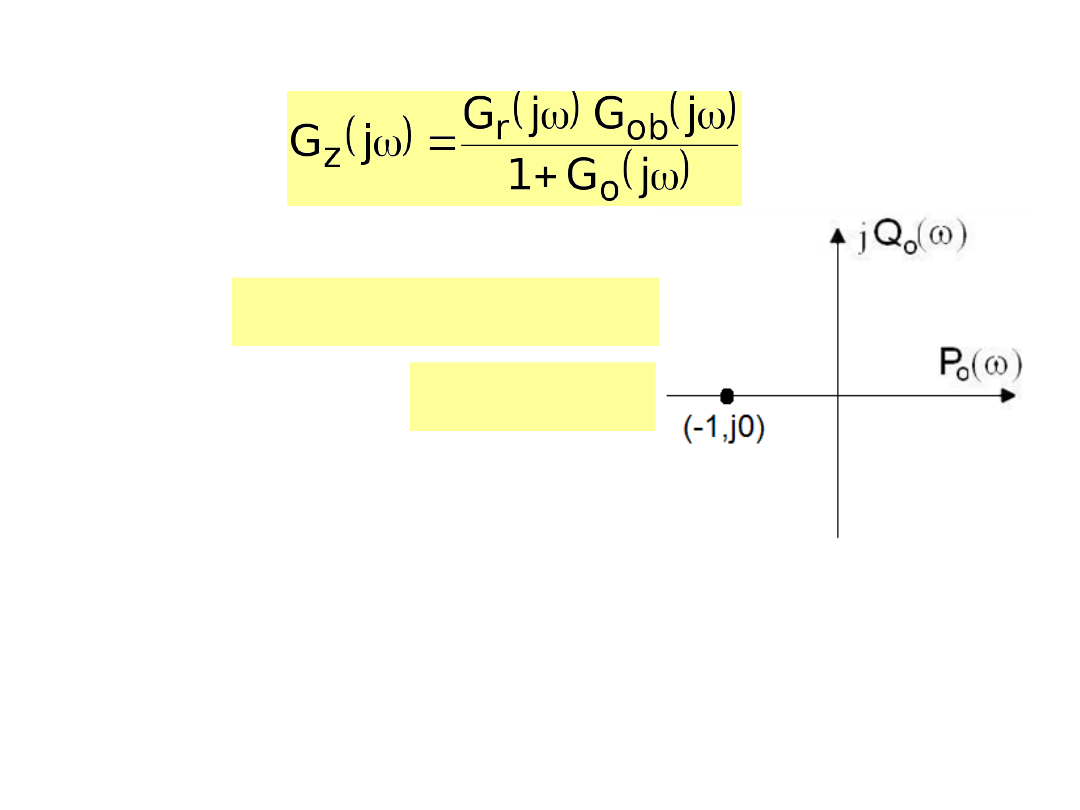
19
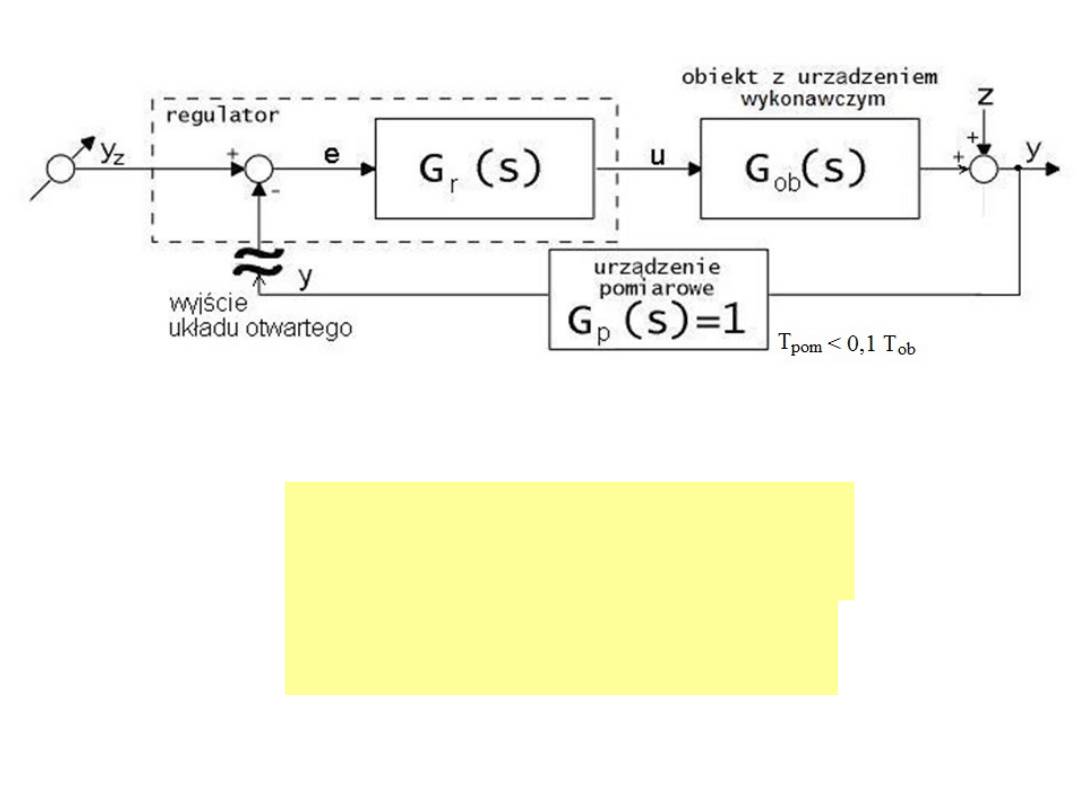
Transmitancja układu otwartego G
o
(s):
G
o
(s) = G
r
(s) G
ob
(s) G
p
(s)
o
o
o
p
ob
r
o
jQ
P
j
G
j
G
j
G
j
G
j
G
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
20
Transmitancja układu zamkniętego:
Równanie charakterystyczne:
M(j)=1 + G
o
(j)=0
stąd G
o
(j) = -1
Warunek graniczny stabilności:
Warunek graniczny stabilności:
-
amplituda: |G
amplituda: |G
o
o
(j
(j
= 1
= 1
-
faza: φ = -π
faza: φ = -π
czyli przejście charakterystyki amplitudowo-
czyli przejście charakterystyki amplitudowo-
fazowej układu otwartego przez punkt (-1, j0)
fazowej układu otwartego przez punkt (-1, j0)
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
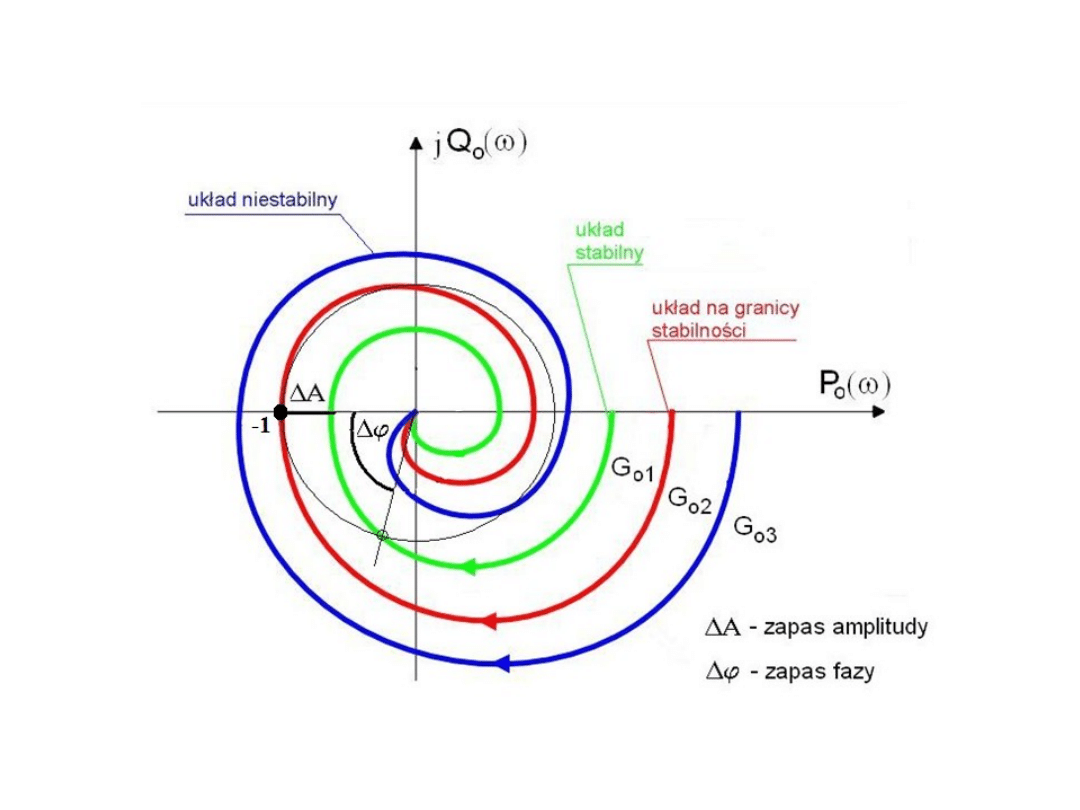
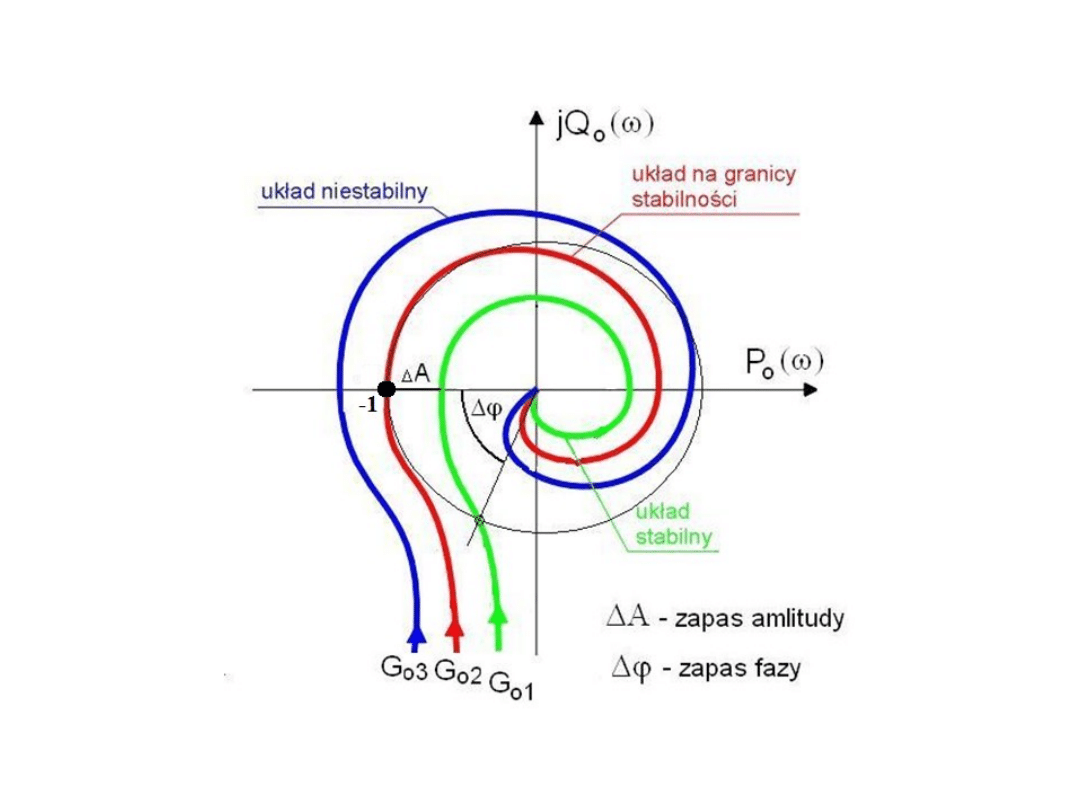
21
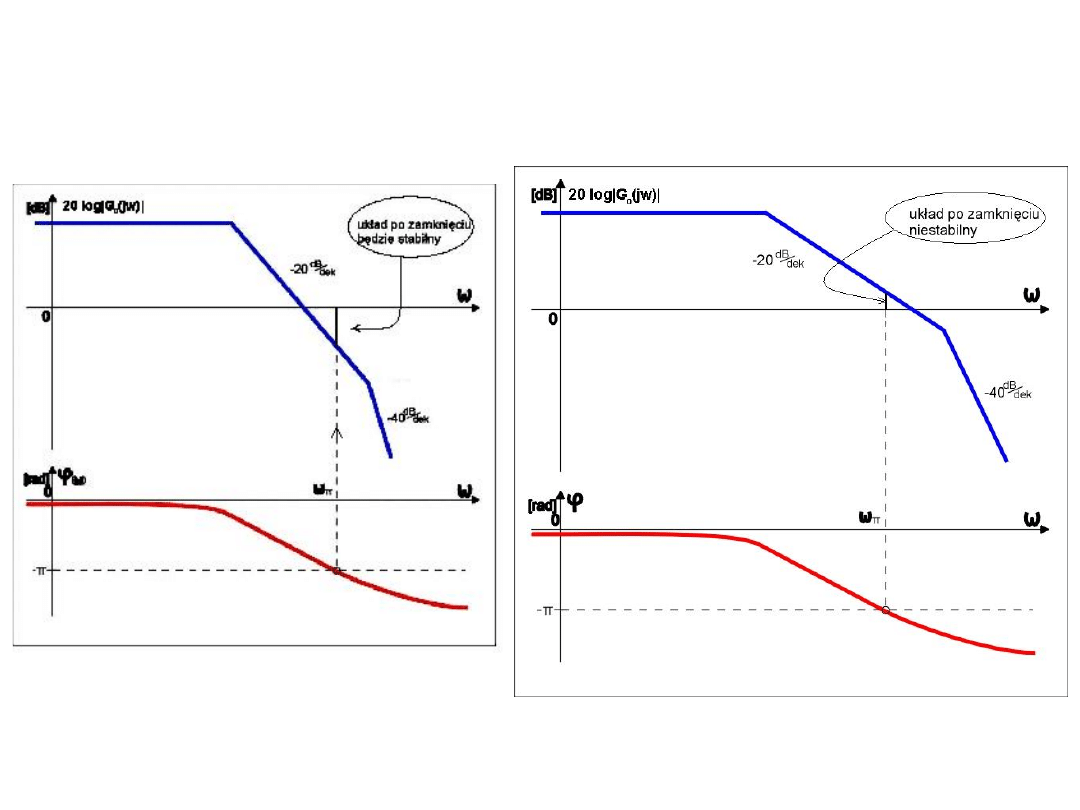
Jeżeli układ otwarty jest stabilny, to
układ zamknięty jest również
stabilny, jeżeli charakterystyka
amplitudowo-fazowa układu
otwartego nie obejmuje punktu (-1,
j0).
Jeżeli układ otwarty jest niestabilny i ma k
Jeżeli układ otwarty jest niestabilny i ma k
pierwiastków na prawej półpłaszczyźnie, to układ
pierwiastków na prawej półpłaszczyźnie, to układ
zamknięty jest stabilny, jeżeli charakterystyka
zamknięty jest stabilny, jeżeli charakterystyka
amplitudowo-fazowa układu otwartego obejmuje
amplitudowo-fazowa układu otwartego obejmuje
punkt (-1, j0) k/2 razy.
punkt (-1, j0) k/2 razy.
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
22
Kryterium Nyquista dla układów statycznych
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
23
Kryterium Nyquista dla układów astatycznych
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
24
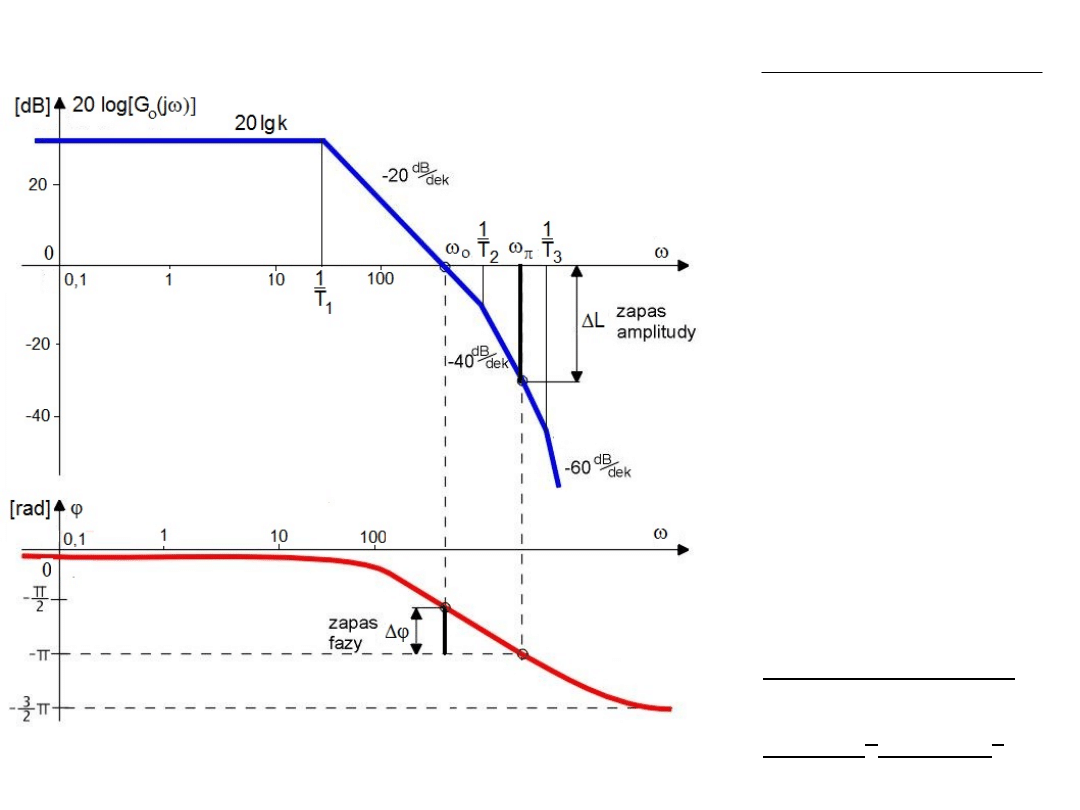
Logarytmiczne kryterium Nyquista
0
A
lg
20
1
A
0
A
lg
20
1
A
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
25
Dla dobrze
dobranego
regulatora
zapas
zapas
amplitudy
amplitudy
powinien
wynosić
od 6 do 12 dB,
a zapas fazy
zapas fazy
od 30
o
do 60
o
3
2
1
o
T
j
1
T
j
1
T
j
1
k
j
G
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
26
JAKOŚĆ REGULACJI
W STANACH PRZEJŚCIOWYCH
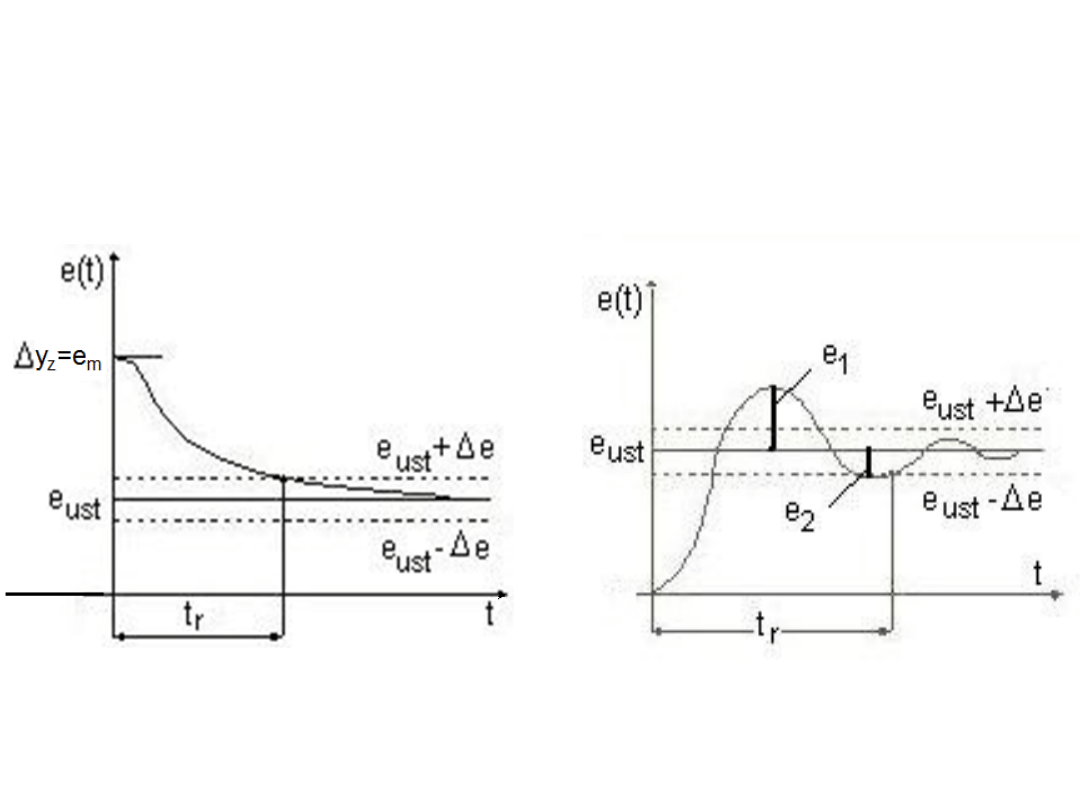
Kryteria czasowe
Kryteria czasowe
Tworzą parametry odpowiedzi układu (uchybu
regulacji e lub wielkości regulowanej y) na
skokowe zmiany wielkości zadanej lub zakłóceń:
czas regulacji
t
r
jako czas po upływie którego uchyb
regulacji staje się mniejszy niż przyjęta wartość
dopuszczalna e, najczęściej przyjmuje się t
r
min oraz
e = (0,02 ÷ 0,05) y
z
przeregulowanie
æ = e
2
/ e
1
· 100% = 10 ÷ 30 % ,
najczęściej przyjmuje się 20%
Czas regulacji określający szybkość działania układu, w
praktyce można ocenić w przybliżeniu jako: t
r
= (3 ÷ 5)
T
zast ob
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
27
Skokowa
zmiana wartości zadanej
Skokowy
wpływ zakłóceń
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
28
Wskaźnik regulacji
Wskaźnik regulacji
Za wskaźnik regulacji przyjmuje się stosunek
transformaty Laplace`a uchybu regulacji układu
zamkniętego E
E
r
r
(s) (z regulatorem)
(s) (z regulatorem)
do transformaty Laplace`a uchybu sterowania
układu otwartego E
E
o
o
(s) (bez regulatora)
(s) (bez regulatora)
:
Jest wskaźnikiem efektywności tłumienia
zakłóceń przez układ ze sprzężeniem zwrotnym.
s
G
1
1
s
q
o
s
E
s
E
s
q
o
r
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
29
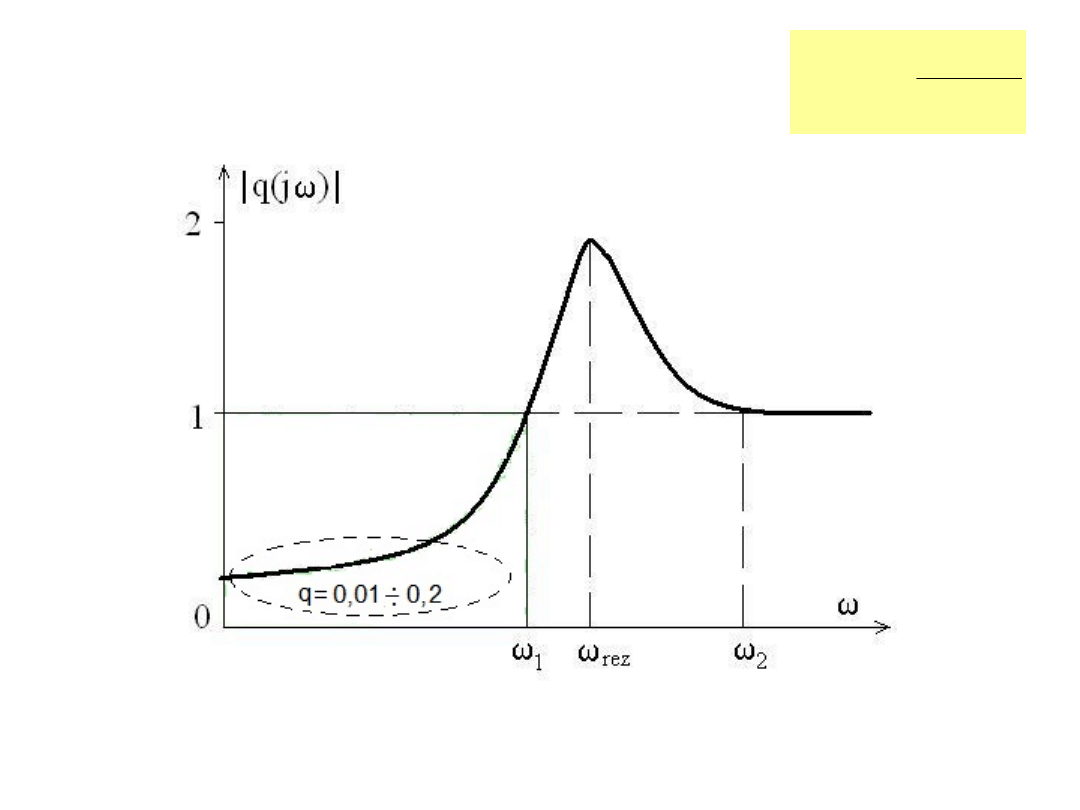
Wskaźnik regulacji w postaci widmowej:
j
E
j
E
j
q
o
r

prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
30
W paśmie tłumienia zakłóceń 0<ω<ω
1
,
dla którego |
q(jω)|<1, wpływ zakłóceń na wielkość regulowaną
jest q razy słabszy dla obiektu regulowanego niż
dla obiektu nieregulowanego.
W paśmie rezonansowym ω
1
<ω<ω
2
, dla którego |
q(jω)|>1, wpływ zakłóceń jest q razy silniejszy dla
obiektu regulowanego.
W paśmie nad rezonansowym ω>ω
2
, dla którego |
q(jω)|=1, wpływ zakłóceń na wielkość regulowaną
jest taki sam jak dla obiektu nieregulowanego.
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
31
Kryteria całkowe
Kryteria całkowe
Całkowe kryteria jakości pozwalają ocenić:
- zarówno jakość regulacji w stanie nieustalonym
(zapas stabilności i szybkość działania układu),
- jak i w stanie ustalonym (dokładność
statyczna).
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
32
min
dt
t
e
t
I
0
2
3
min
dt
t
e
I
0
4
min
dt
t
e
t
I
0
5
ITSE - integral of time multiplied
by squared error
IAE - integral value of error
ITAE - integral of time multiplied
by absolute value of error
0
2
2
min
dt
t
e
I
min
dt
t
e
I
0
1
IE - integral error
ISE - integral squared error

prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
33
DOPUSZCZALNY UCHYB USTALONY
DOPUSZCZALNY UCHYB USTALONY
Za miarę dokładności statycznej regulacji
przyjmuje się wartość uchybu regulacji w stanie
ustalonym:
e(t) = y
z
(t) – y(t)
Wartość tą można wyznaczyć analitycznie
wykorzystując twierdzenia o wartości końcowej
rachunku operatorowego Laplace’a.
Oczywistym jest, że najbardziej pożądaną
wartością tego uchybu jest wartość zero.
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
34
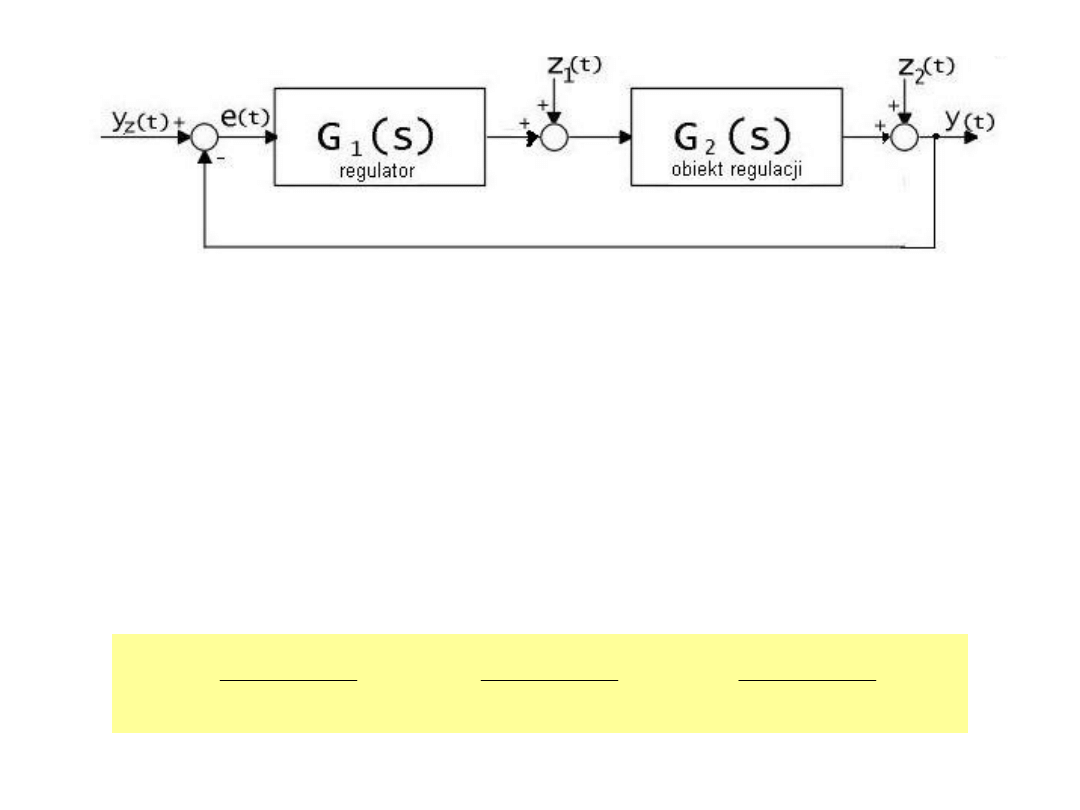
Transformata wielkości wyjściowej y(t) jest sumą
składowej wywołanej zmianą wartości zadanej i
składowej spowodowanej oddziaływaniem
zakłóceń:
Y(s) = G
1
(s) G
2
(s) E(s) + G
2
(s) Z
1
(s)+Z
2
(s)
nastepnie
E(s) = Y
z
(s) – Y(s)
E(s) = Y
z
(s) – G
1
(s) G
2
(s) E(s) – G
2
(s) Z
1
(s)-Z
2
(s)
G
o
(s) = G
1
(s) G
2
(s)
s
Z
s
G
1
1
s
Z
s
G
1
s
G
s
Y
s
G
1
1
s
E
2
o
1
o
2
z
o
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
35
Biorąc pod uwagę, że zakłócenia są
przypadkowe i nie można przewidzieć, jaki
będzie moduł i argument transformat Z
1
(s) i
Z
2
(s), dlatego znak minus można zastąpić
znakiem plus:
E(s) = G
u
(s) Y
z
(s) + G
u
(s) G
2
(s) Z
1
(s)+G
u
(s) Z
2
(s)
gdzie
nazywa się
transmitancją uchybową
układu
zamkniętego.
s
G
1
1
s
G
o
u

prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
36
Uchyb nadążania i zakłóceniowy
Na podstawie ostatniej zależności można wyrazić
składową transformaty uchybu wnoszoną przez
zmiany wielkości zadanej y
z
(t) jako
uchyb
nadążania
za zmianami wartości zadanej:
E
y
(s) = G
u
(s) Y
z
(s)
a składową wywołaną oddziaływaniem zakłóceń
w postaci
uchybu zakłóceniowego
:
E
z
(s) = G
u
(s) G
2
(s) Z
1
(s)+G
u
(s) Z
2
(s)
Wartość tych składowych w stanie ustalonym
wyznacza się korzystając z twierdzenia o
wartości końcowej przekształcenia Laplace’a.
prof. Józef Lisowski
PODSTAWY
AUTOMATYKI_VI_Wymagania
37
Wartości składowych uchybu ustalonego
wyznacza się z następujących zależności:
Dla układów z całkowaniem
Dla układów z całkowaniem
uchyb ustalony jest równy zero
uchyb ustalony jest równy zero
(1/s w G
(1/s w G
1
1
(s) - regulator lub w G
(s) - regulator lub w G
2
2
(s) - obiekt)
(s) - obiekt)
s
G
s
G
1
s
Y
s
lim
s
E
s
lim
t
e
lim
e
2
1
z
0
s
y
0
s
y
t
ust
y
s
G
s
G
1
s
Z
s
G
s
G
1
s
Z
s
G
s
lim
s
E
s
lim
t
e
lim
e
2
1
2
2
1
1
2
0
s
z
0
s
z
t
ust
z
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
Wyszukiwarka
Podobne podstrony:
Urywki z Aneksu VI, wymagania odnosnie spalarek
Seminarium VI wymagane wiadomości
Seminarium VI wymagane wiadomości
Seminarium VI wymagane wiadomości
Program wymagania z audycji muzycznych kl IV do VI SM I stopień
WYMAGANIA EDUKACYJNE Z J. POLSKIEGO kl VI, DOKUMENTACJA, SZKOŁA PODSTAWOWA, WYMAGANIA Z PRZEDMIOTÓW
WYMAGANIA PODSTAWOWE Z J. POLSKIEGO kl. VI, DOKUMENTACJA, SZKOŁA PODSTAWOWA, WYMAGANIA Z PRZEDMIOTÓ
Program wymagania z audycji muzycznych kl IV do VI SM I stopień
Wymagania na VI kyu
MOJE WYMAGANIA IV VI
wymagania, j polski VI
Lekcja kliniczna 2 VI rok WL
Szkol Wymagania sanit higieniczne w szpitalu
Prezentacja VI Bezrobocie
PS VI
więcej podobnych podstron