
1
Segmentation
-
Part 2
Edge-Based Segmentation
Elsayed Hemayed
Fall 2007
This material is a modified version of the slides provided by Milan Sonka, Vaclav Hlavac, and Roger
Boyle, Image Processing, Analysis, and Machine Vision..

Computer Vision
Segmentation
2
Outline
Edge image thresholding
Edge Relaxation
Border Tracing
•
Border detection as graph searching
•
Border detection as dynamic programming
HoughTransforms

Computer Vision
Segmentation
3
Edge-based Segmentation
Rely on edges found
using edge-detecting operators, which
rely on discontinuities in gray-level or color.
Supplementary processing
is needed to combine edges into
edge
chains
that correspond better with borders.
Prior information
has a significant role.
The most common problems of edge-based segmentation
are an edge presence in locations where there is no border,
and no edge presence where a real border exists. (
false
alarms and missed detections
)

Computer Vision
Segmentation
4
Edge Image Thresholding
Simple (global) thresholding
can be applied to
edge images to exclude unreliable edges (avoid
over- and under thresholding).
•
Problem : thickening of edges
•
Solution:
• if edges have direction
non-maximal suppression
can be used or
• by thresholding using
hysteresis
as in Canny
detector.

Computer Vision
Segmentation
5
Edge Relaxation
It is applied
to construct continuous edges
.
By
investigating the neighbouring
edges local edge strength is
either increased or decreased. Usually “crack” edges are used.
All the image
properties
, including those of further edge
existence,
are iteratively evaluated with more precision
until
the edge context is totally clear
based on the strength of edges
in a specified local
neighborhood, the
confidence of each edge is either
increased
or decreased.
A
weak edge
positioned between two strong edges provides an
example of context; it is highly probable that this inter-
positioned weak edge should be a part of a resulting boundary.
If, on the other hand, an edge (
even a strong one
) is positioned
by itself with no supporting context, it is probably not a part of
any border.
Computer Vision
Segmentation
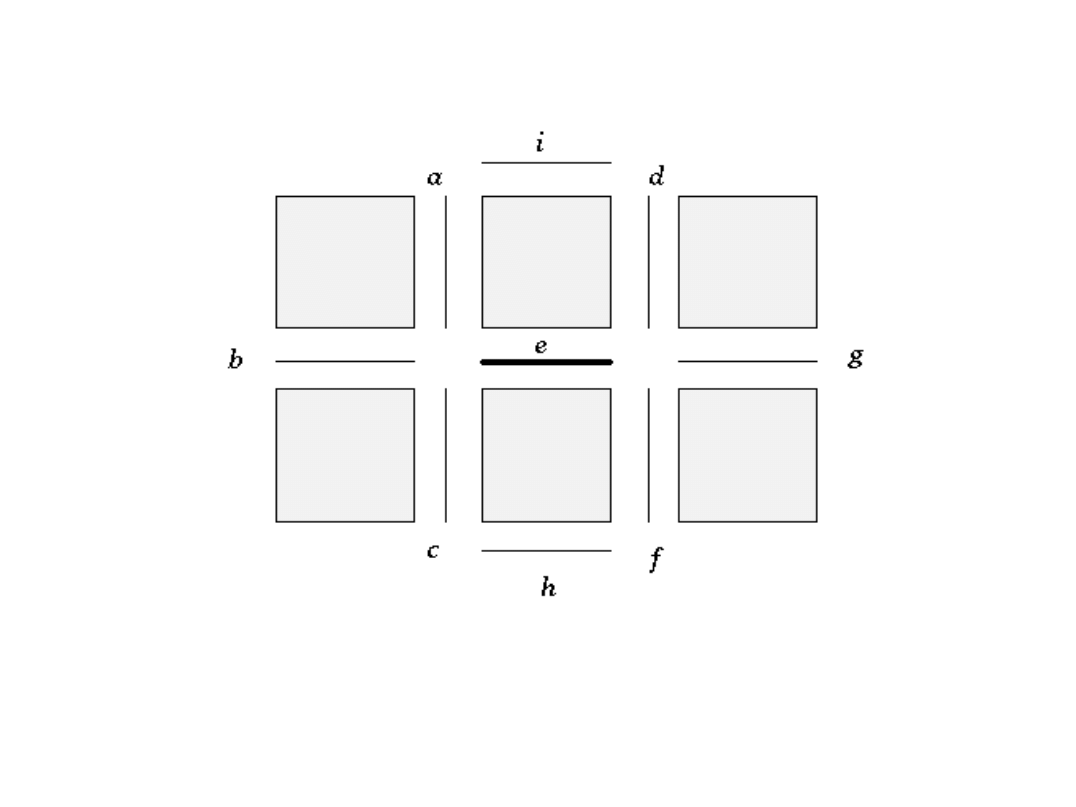
6
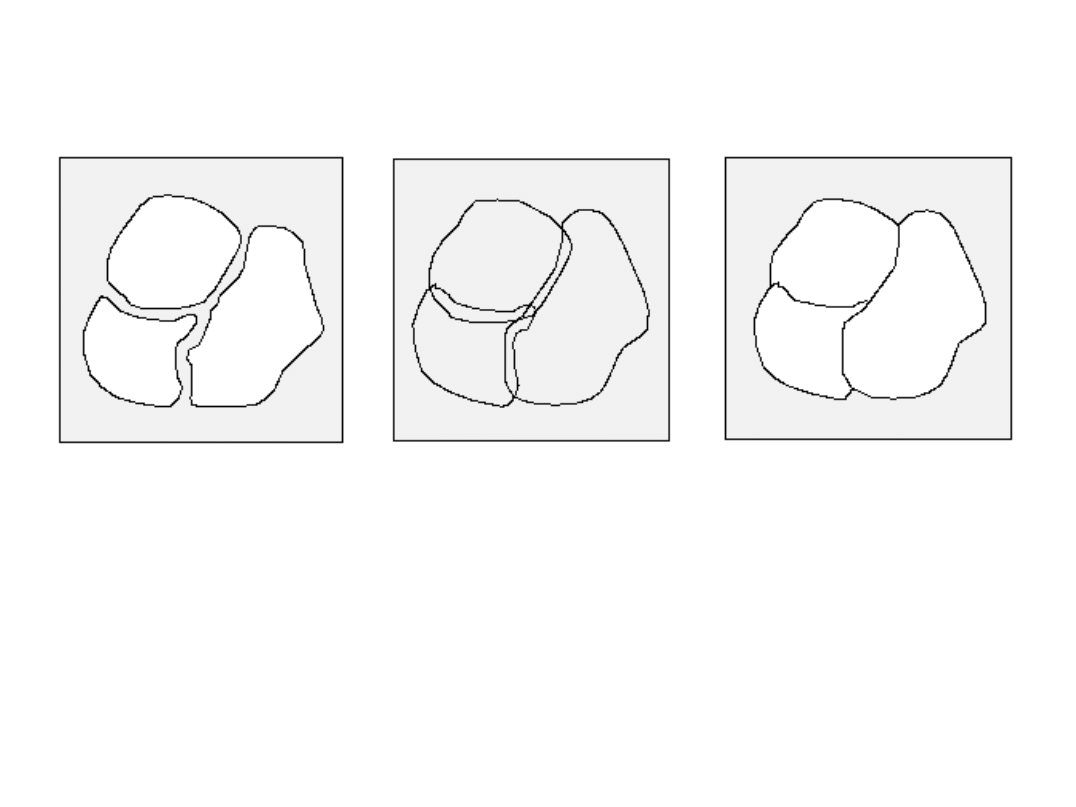
Crack edges surrounding central edge
The central edge e has a vertex at each of its ends and three possible
border continuations can be found from both of these vertices.
Computer Vision
Segmentation
7
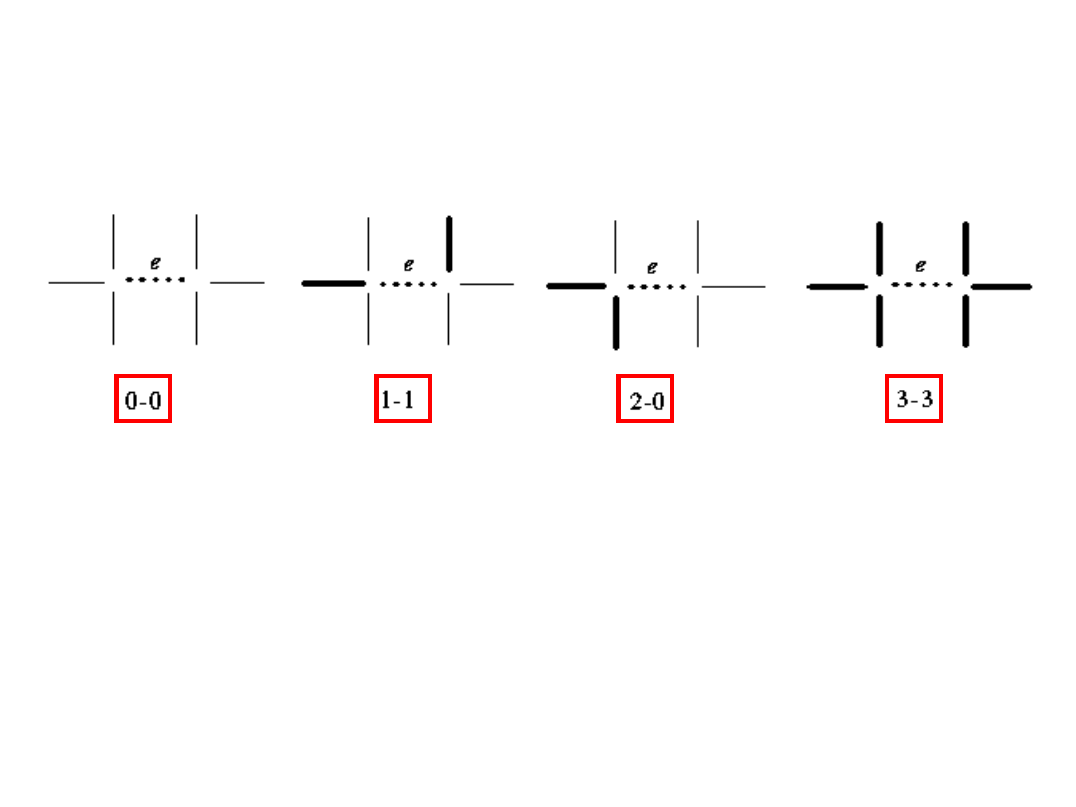
Edge Types and its influence
• 0-0 isolated
negative influence
• 0-1 uncertain
weak positive
• 0-2, 0-3 dead end
negative influence
• 1-1 continuation
strong positive
• 1-2, 1-3 continuation
strong positive
•
2-2, 2-3, 3-3 bridge between borders no influence on edge confidence
Computer Vision
Segmentation
8
Algorithm:
Edge Relaxation
1.
Evaluate Vertex Type:
is the number of edges emanating from
the vertex above a threshold value. (possible values are 0, 1, 2,
3.
2.
Evaluate Edge Type
: is determined by number of emerging
edges at each end. (0-0, 0-1, 0-2, 0-3, 1-1, 1-2, 1-3, 2-2, 2-3, 3-3)
3.
Update the confidence of each edge e according to its type
4.
Stop if all edge confidence have converged either to 0 or 1.
Note: Edge relaxation is an iterative method, with edge confidences converging
either to zero (edge termination) or one (the edge forms a border).
Computer Vision
Segmentation
9
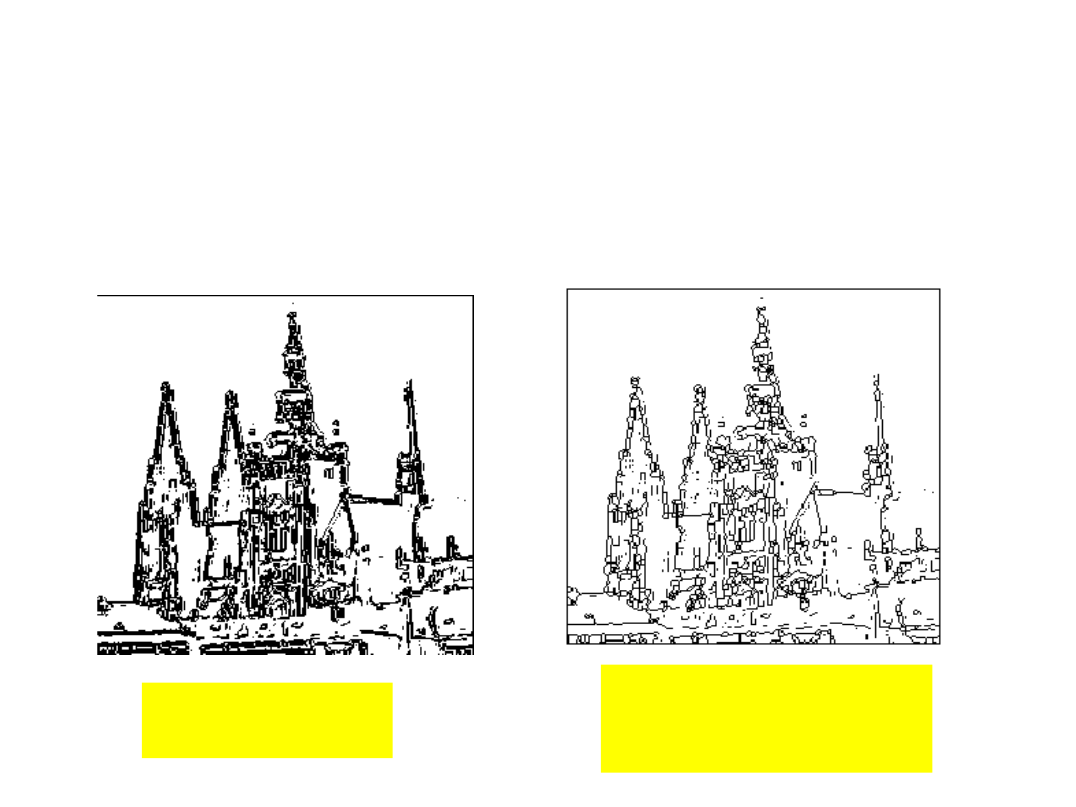
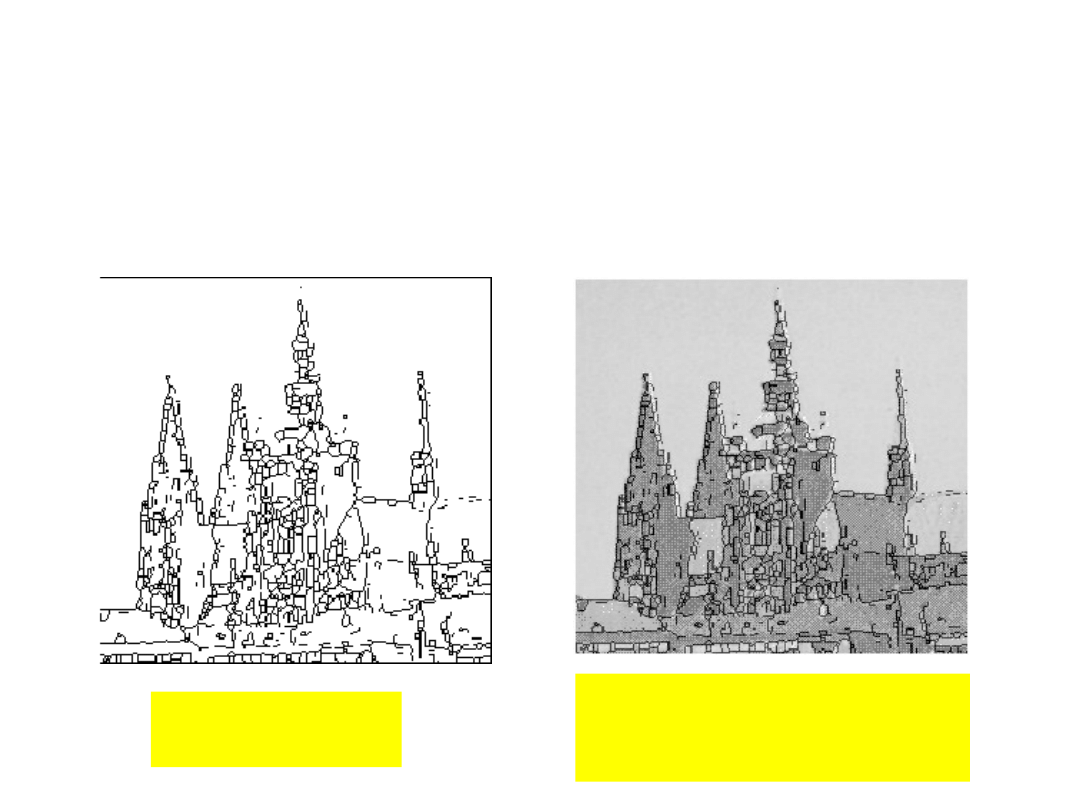
Effect of Edge Relaxation
After 10
iterations
After thinning using
non-maximal
suppression
Computer Vision
Segmentation
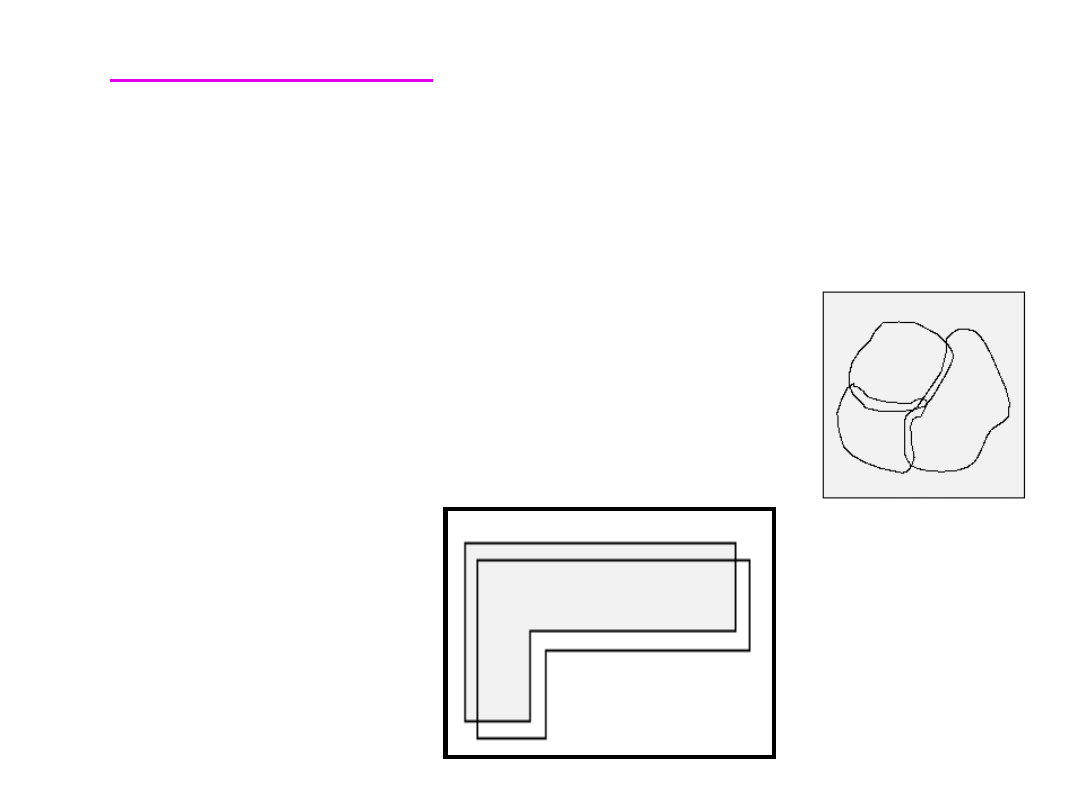
10
After 100
iterations
Borders after 100
iterations overlaid on
original
Effect of Edge Relaxation

Computer Vision
Segmentation
11
If region border is not known but regions have
been defined, borders can be detected.
During border tracing
three types of borders
can
be defined:
•
An
inner
region border is a subset of the region.
•
An
outer
border is not a subset of the region.
•
An
extended
border
Border Tracing
Computer Vision
Segmentation
12
Border Types
Inner
Boundary
Outer
Boundary
Extended
Boundary
The inner border is always part of a region but the outer border never
is. Therefore, if two regions are adjacent, they never have a common
border, which causes difficulties in higher processing levels with region
description, region merging, etc.
The extended border defines single common border between adjacent
regions
Computer Vision
Segmentation
13
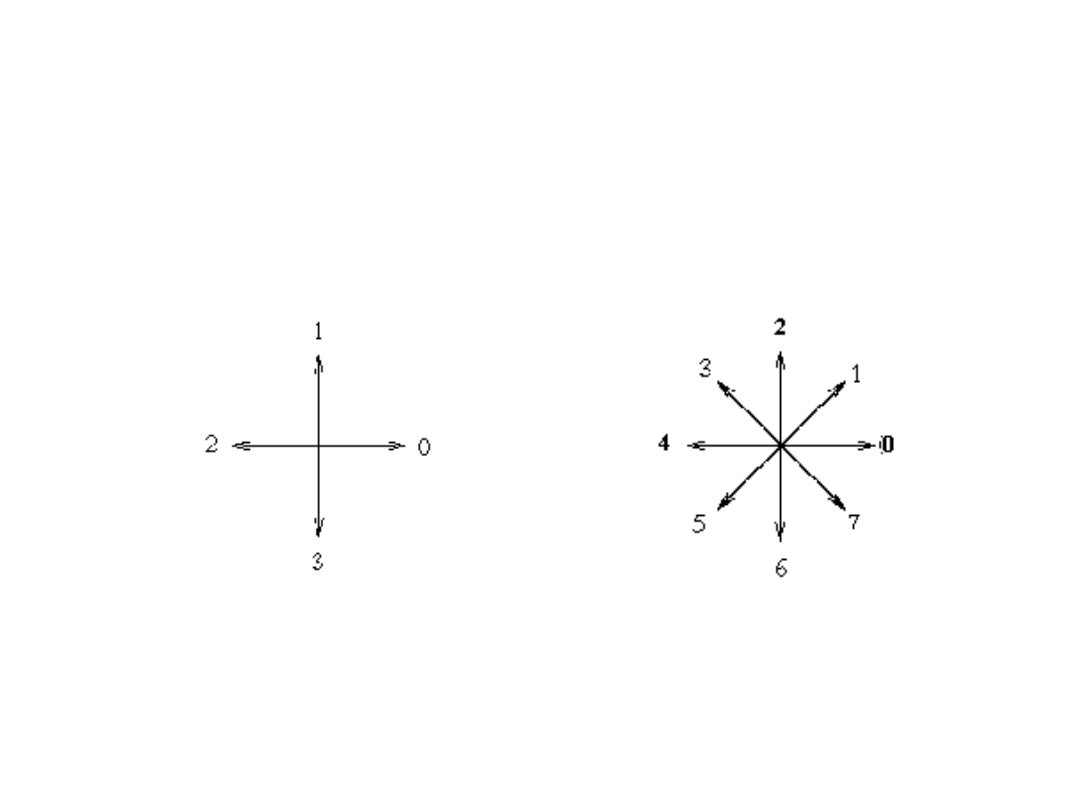
Connectivity Types
4 -
4 -
connectivity
connectivity
8 -
8 -
connectivity
connectivity
Computer Vision
Segmentation
14
1.
Search
image from top left till a starting pixel P
o
of new
region border is found.
2.
Define
dir
which stores the direction of the move from the
previous to the current border element.
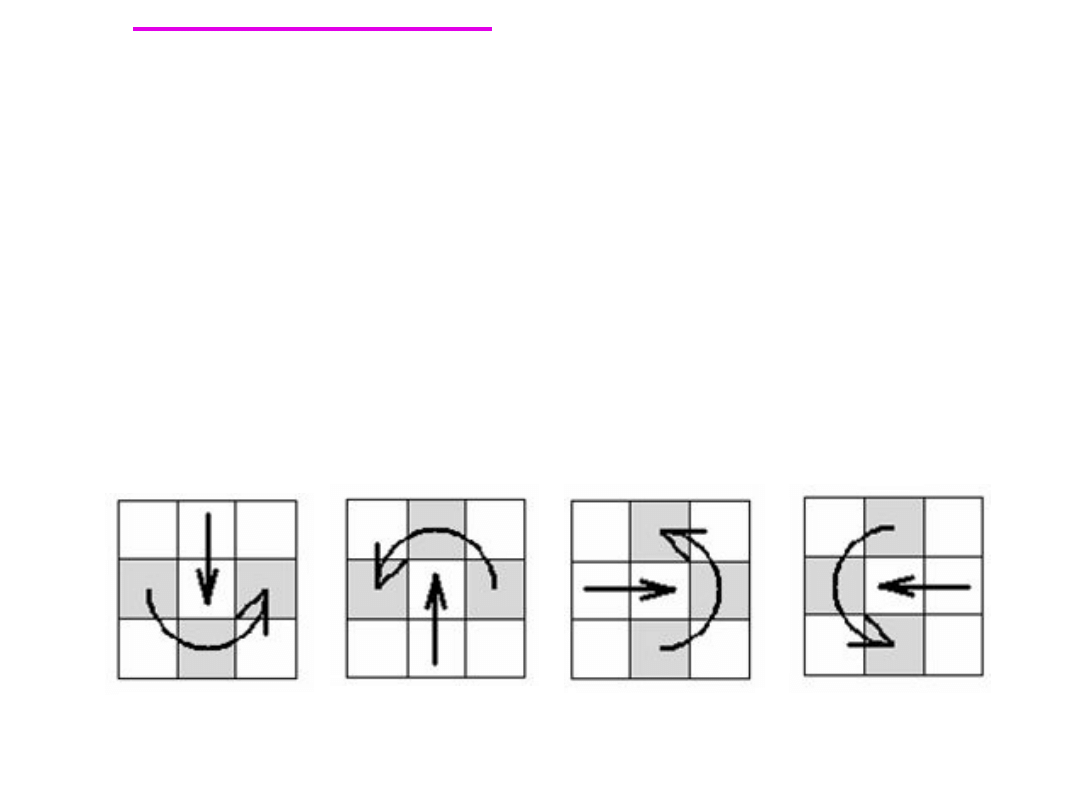
3.
Search the 3x3 neighborhood of current pixel in anti-
clockwise direction beginning at
(dir+3) mod 4
The first pixel found is a new boundary element Pn. Update
dir value.
Algorithm:
Inner Border
Tracing
(4-connectivity)
dir = 3
1
0
2
Computer Vision
Segmentation
15
4.
If the current boundary element P
n
is equal to
the second border element P
1
and if the
previous border element P
n-1
is equal to P
0
stop.
Otherwise go to step 3.
5.
The detected inner border is represented by
P
0
... P
n-2
.
NOTE:
Algorithm does not determine edges of
region holes!
Algorithm:
Inner Border Tracing (cont.)
Computer Vision
Segmentation
16
1.
Trace inner boundary region boundary in 4-
connectivity until done.
2.
The outer boundary consists of non-region pixels
tested during the search process. Any
pixels
tested more than once
they are listed more than
once!
Algorithm:
Outer Border
Tracing
Computer Vision
Segmentation
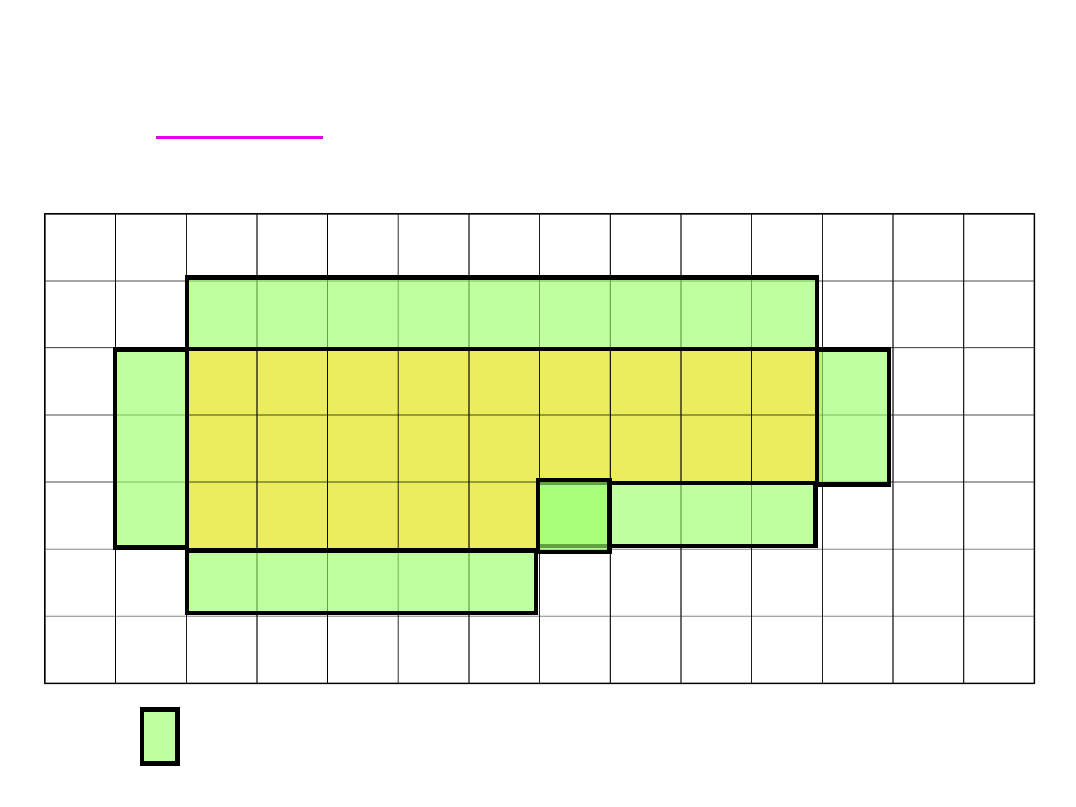
17
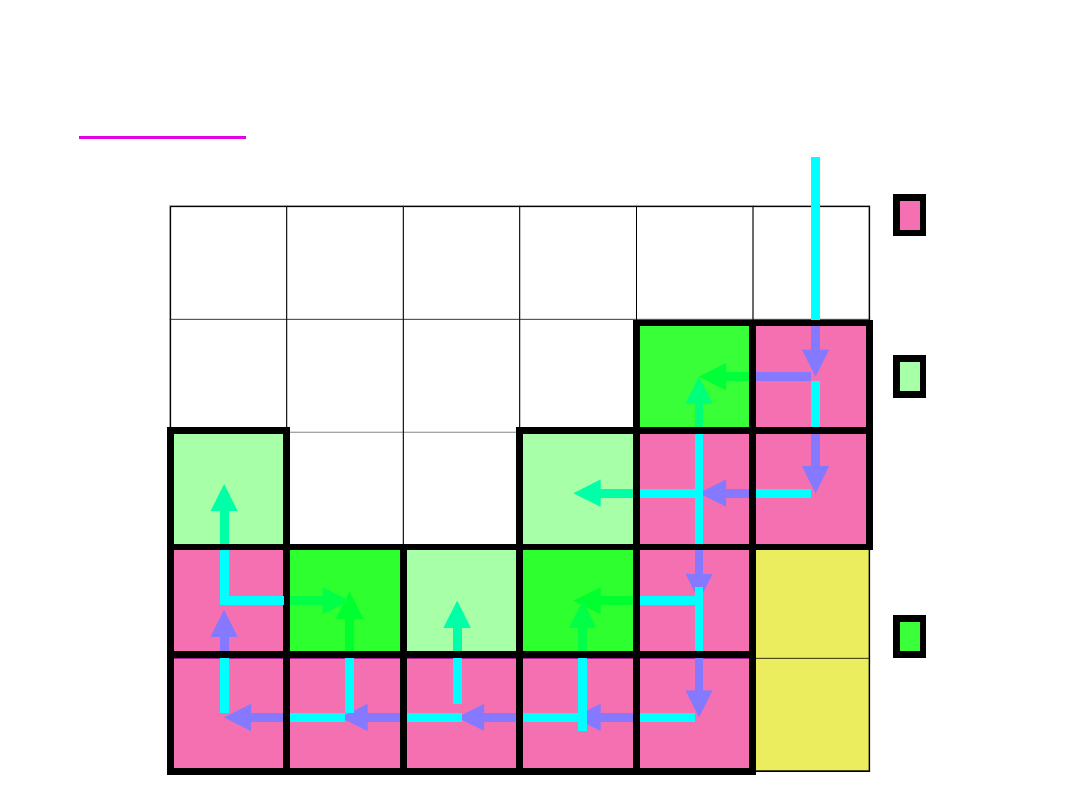
Demo:
Inner and Outer Border Tracing
Inner
Borde
r Pixel
Outer
Borde
r Pixel
detec.
once
Outer
Borde
r Pixel
detec.
twice
Computer Vision
Segmentation
18
Multiple Outer Border Example
Computer Vision
Segmentation
19
It is constructed
from the outer boundary
by:
1.
shifting all upper outer boundary points one pixel
down and right
2.
all left
one pixel right
3.
all right
one pixel down
4.
all lower
remain unchanged.
Algorithm:
Extended Border
Tracing
outer boundary
Computer Vision
Segmentation
20
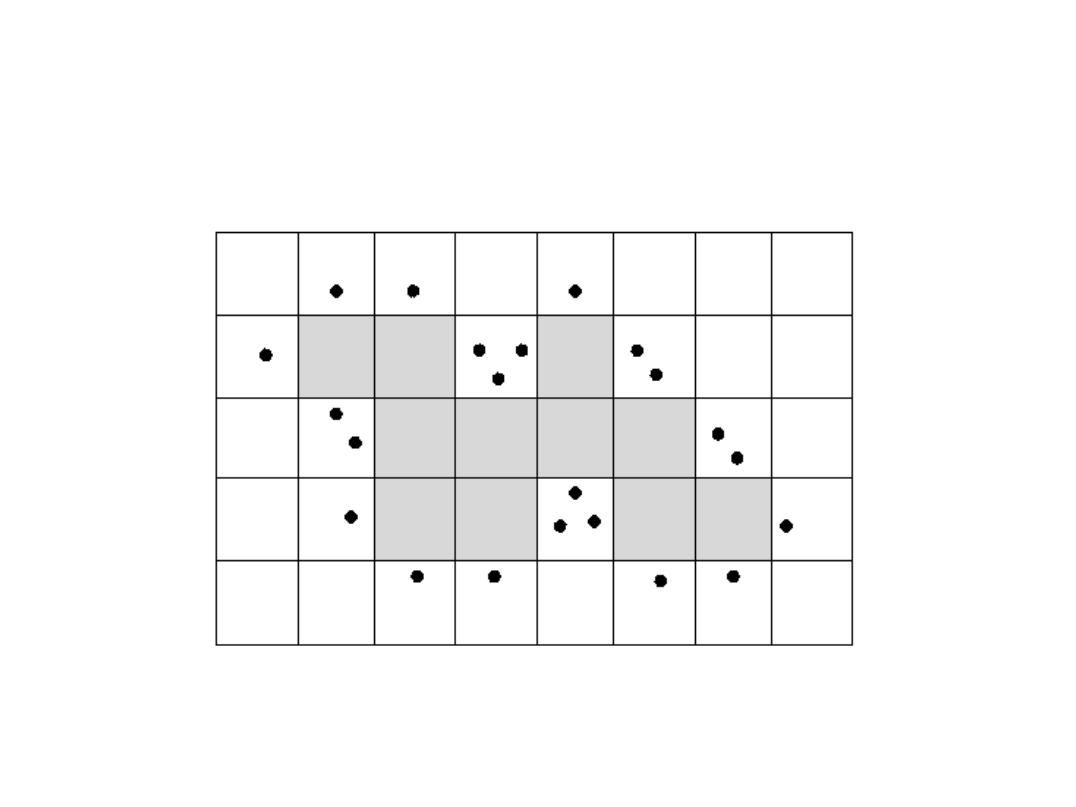
Demo:
Extended Border Tracing
Outer
Boundary

Computer Vision
Segmentation
21
Used when
a-priori information
about a
known
starting point and a known ending point
is
available.
The search is then for the
optimal path
that
connects those two points in a weighted graph.
Cost of a node
reflects the likelihood that the
border passes through that node.
Border Detection as Graph
Searching
Computer Vision
Segmentation
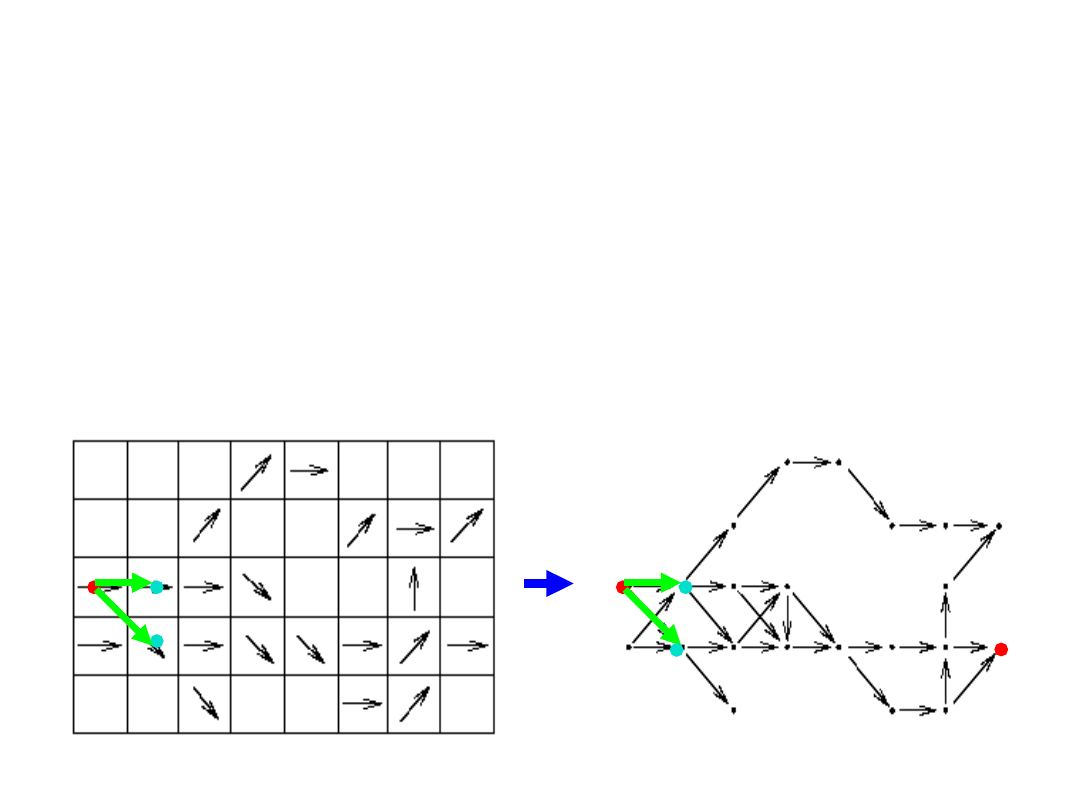
22
Heuristic Graph Search
The border detection process is transformed into
a search for the optimal path in the weighted
graph.
n
A
n
B

Computer Vision
Segmentation
23
1. Edge strength: Forming a border where the maximum
edge strength is obtained from all pixels in the image
2. Border curvature: minimize the difference in edge
directions in two consecutive border elements.
3. Proximity to an approximate border location
dist(x
i
, approximate_boundary)
4. Estimates of the distance to the goal (end-point)
h(x
i
)= dist(x
i
, x
B
)
Cost Functions in
Graph
Searching
Computer Vision
Segmentation
24
1.
Expand the starting node n
A
and put all its successors
into an OPEN list with pointers back to n
A
. Evaluate the
cost function of each expanded node.
2.
If OPEN is empty, fail.
3.
Determine the node
n
i
from OPEN
with lowest cost and
remove it.
4.
If n
i
= n
B
, trace back for the optimum path.
Algorithm:
Heuristic Graph
Search
Computer Vision
Segmentation
25
The border detection process is trans-formed into
a search for the optimal path in the weighted
graph.
Pixel in
OPEN list
Pixel on
optimum
path
n
A
n
B
Demo:
Heuristic Graph
Search
n
A
n
B
n
A
n
B
n
A
n
B
n
A
n
B

Computer Vision
Segmentation
26
The existence of a
path between start and end points is
not guaranteed
. Hence, if no node exists in OPEN list it
may be possible to expand node with non-significant edge
valued successors.
Problem: Extremely large number of expanded nodes in
OPEN list.
Some ‘bad’ nodes may be included which have
a low probability of generating the optimum
Graph Searching Issues

Computer Vision
Segmentation
27
Solution:
Some of the methods that make the solution
more practical (although which do not necessarily
generate the optimum path!) are:
1.
Pruning
the solution tree by:
• Deleting paths with high average cost per
unit length
• Deleting paths that are too short when the
number of nodes in OPEN exceeds a certain
limit
Graph Searching Issues Resolution

Computer Vision
Segmentation
28
2.
Least maximum cost:
Setting the cost of a path as the
most expensive arc in the path, hence path does not
necessarily grow with each step.
3.
Branch and bound:
The cost of a path is not allowed to
exceed a certain limit.
4.
Multi-resolution processing:
A sequence of two graph
search processes is performed. The first in a low resolution
and the second in a higher resolution.
Graph Searching Issues
Resolution(cont.)

Computer Vision
Segmentation
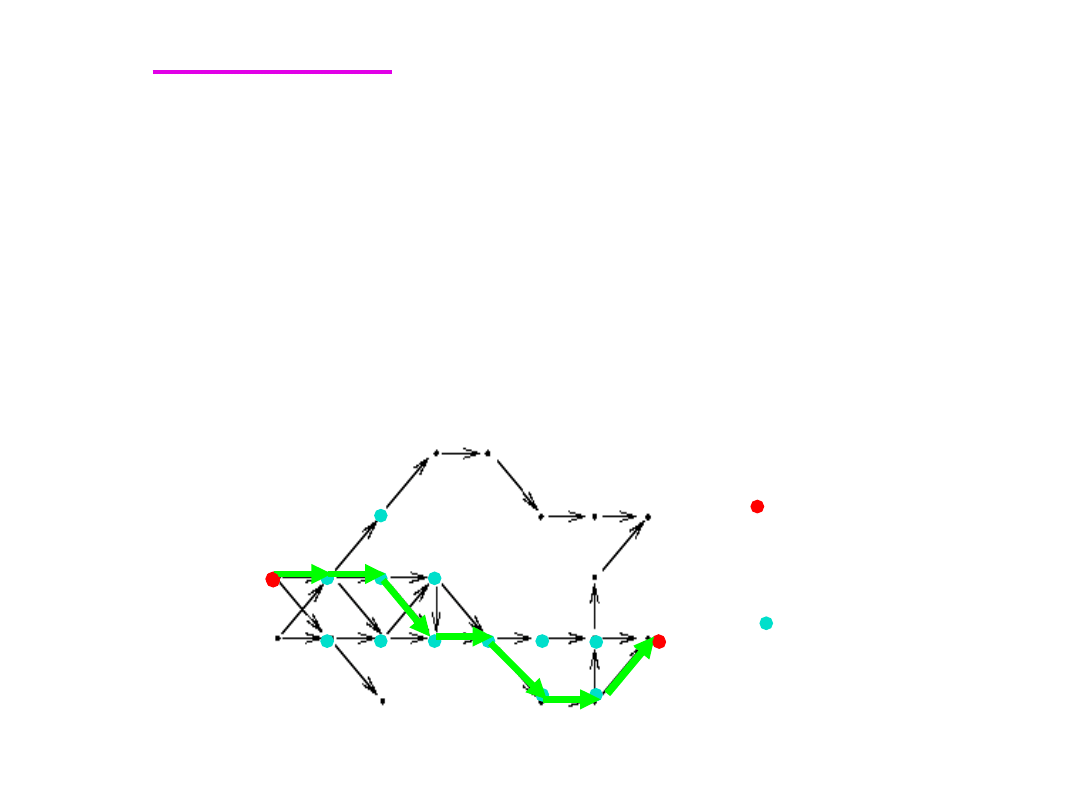
29
Efficient way of simultaneously searching for
optimal path from
multiple starting and ending
points.
Main idea
of optimality is:
“If the optimal path startpoint-endpoint goes through
a point E, then there exists an optimum path in both
its parts startpoint-E and E-endpoint.”
Border detection as
dynamic programming
Computer Vision
Segmentation
30
Demo:
Boundary Tracing as
dynamic programming
A
C
B
F
E
D
G
H
I
Start
Nodes
End
Nodes
7
2
6
1
3
8
2
5
3
4
5
2
7
6
D(2)
E(2)
F(1)
G(7)
H(3)
I(7)

Computer Vision
Segmentation
31
Same
modifications and principle for estimating the
objective function
are applied as before.
Using
the A-algorithm it is not necessary to
construct the entire graph
; in dynamic
programming a complete graph must be
constructed.
Hence,
heuristic search
may be more
efficient
with
respect to
computational
time. However,
dynamic
programming
is more
efficient
when simultaneously
searching
for
optimal path from
multiple starting
and ending points.
Dynamic Programming
versus Graph
Search

Computer Vision
Segmentation
32
Goal:
to link points by determining whether they lie on a curve
of specific shape.
Computational Complexity:
With n points
to find the line connecting
each two:
Complexity = n x (n-1)
= n
2
Hough transform is computationally attractive!
HoughTransform
Computer Vision
Segmentation
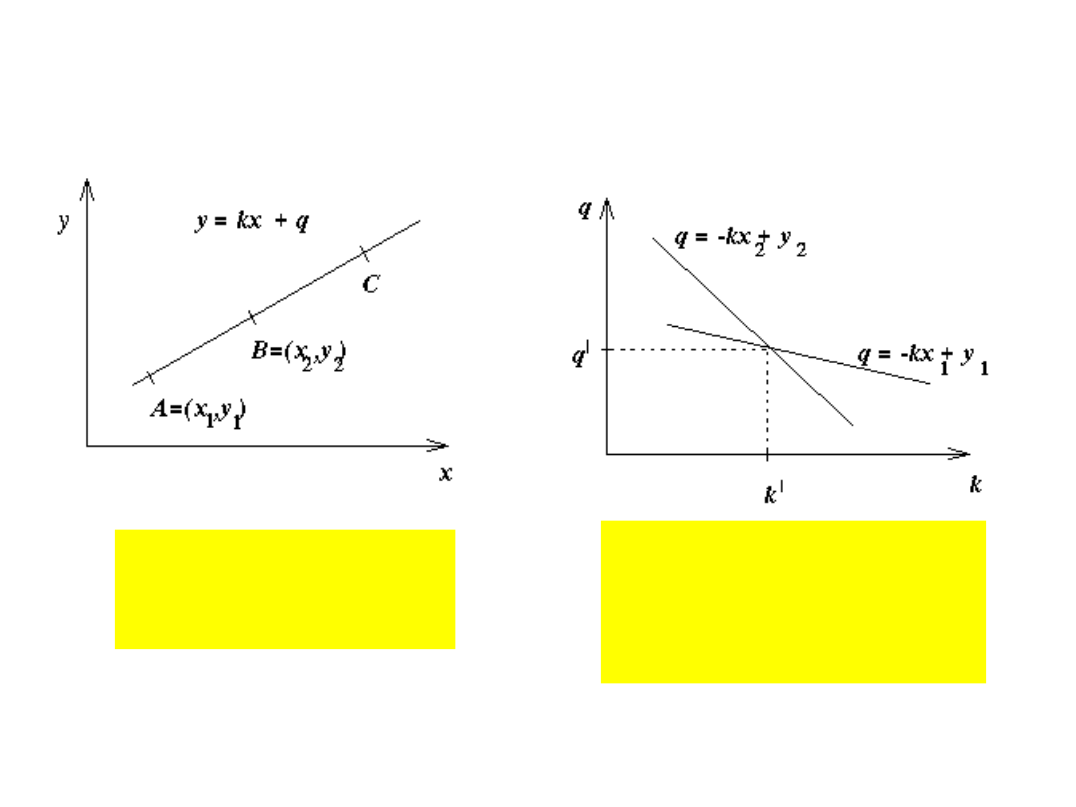
33
Straight Line
All points on line
y = kx + q
All lines through
point
q = y - kx

Computer Vision
Segmentation
34
1. Parameter space is divided into accumulator
cells A, all, initially, set to zero.
2. For every point p(x,y) in image change k in
the range and calculate q
3. For each x
p
, y
p
pair of a point p
A(k
p
, q
p
) = A(k
p
, q
p
) + 1
Algorithm:
Hough Transform for line
detection

Computer Vision
Segmentation
35
4. At the end the value of A(k
i
, q
j
) corresponds to the number
of points that lie on the line:
y = - k
i
x + q
j
Accuracy
of co-linearity is determined by the size of
subdivisions.
Having k subdivisions,
computational complexity
is now
n x k
where k is the number of subdivisions
i.e
. linear
in n!
Algorithm:
Hough Transform for line
detection (cont.)
Computer Vision
Segmentation
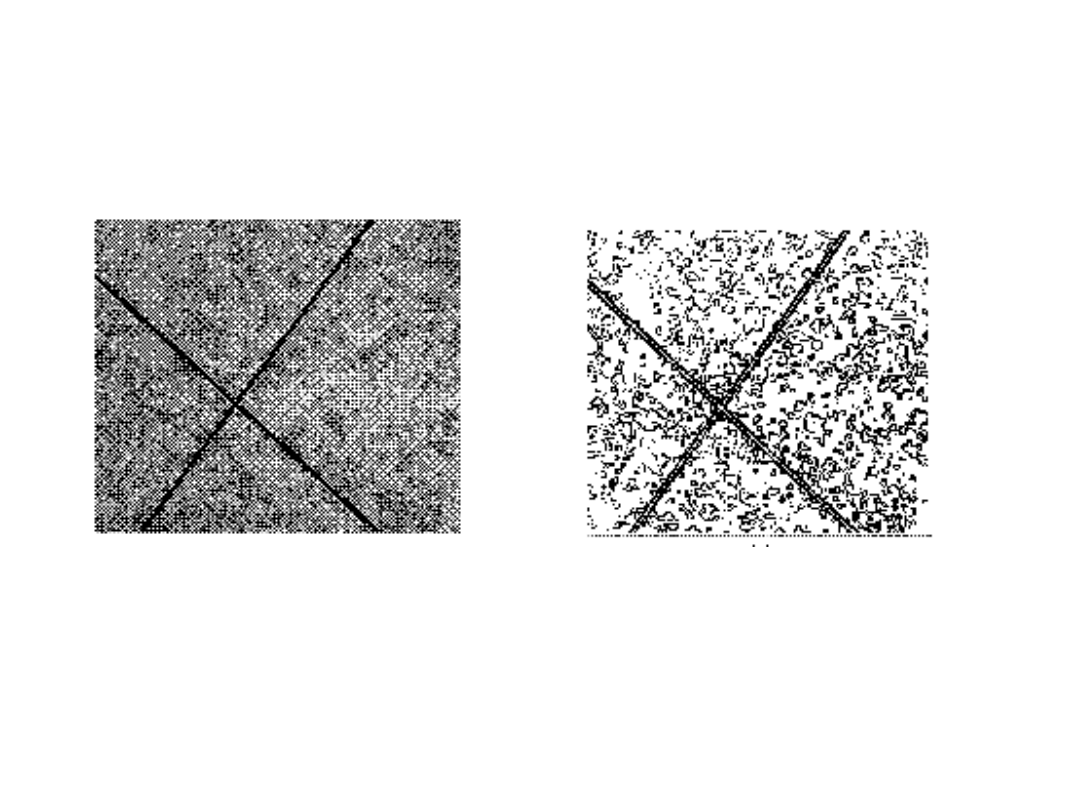
36
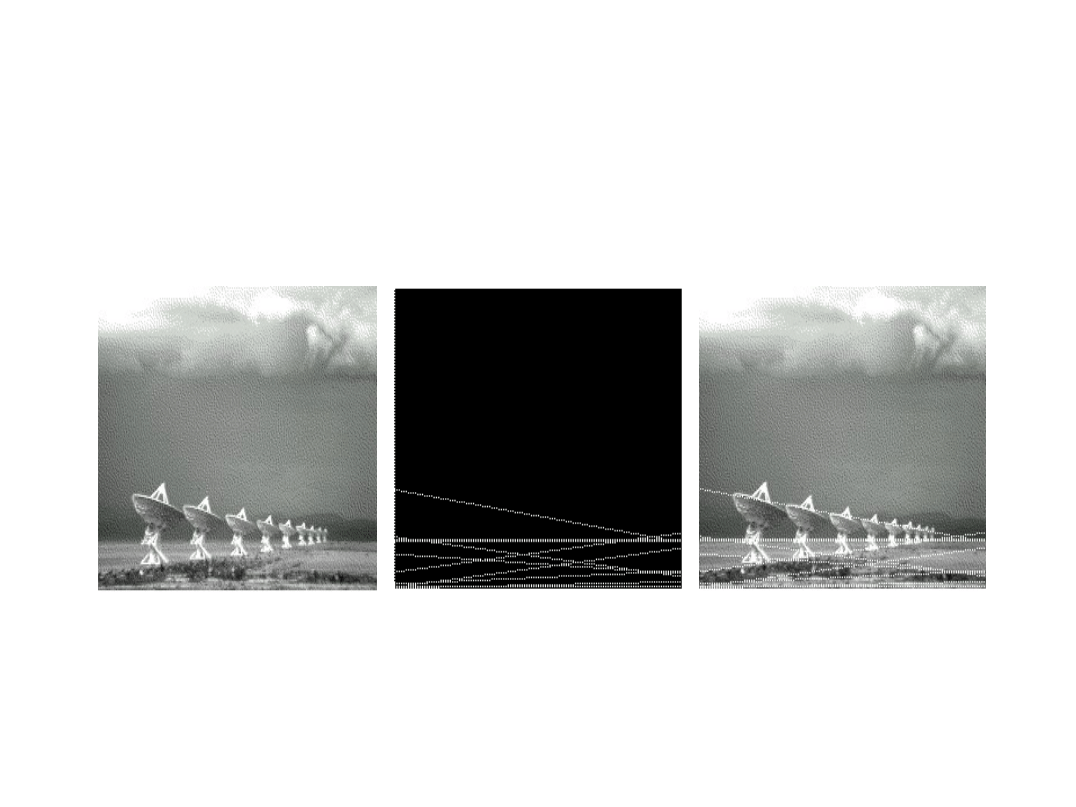
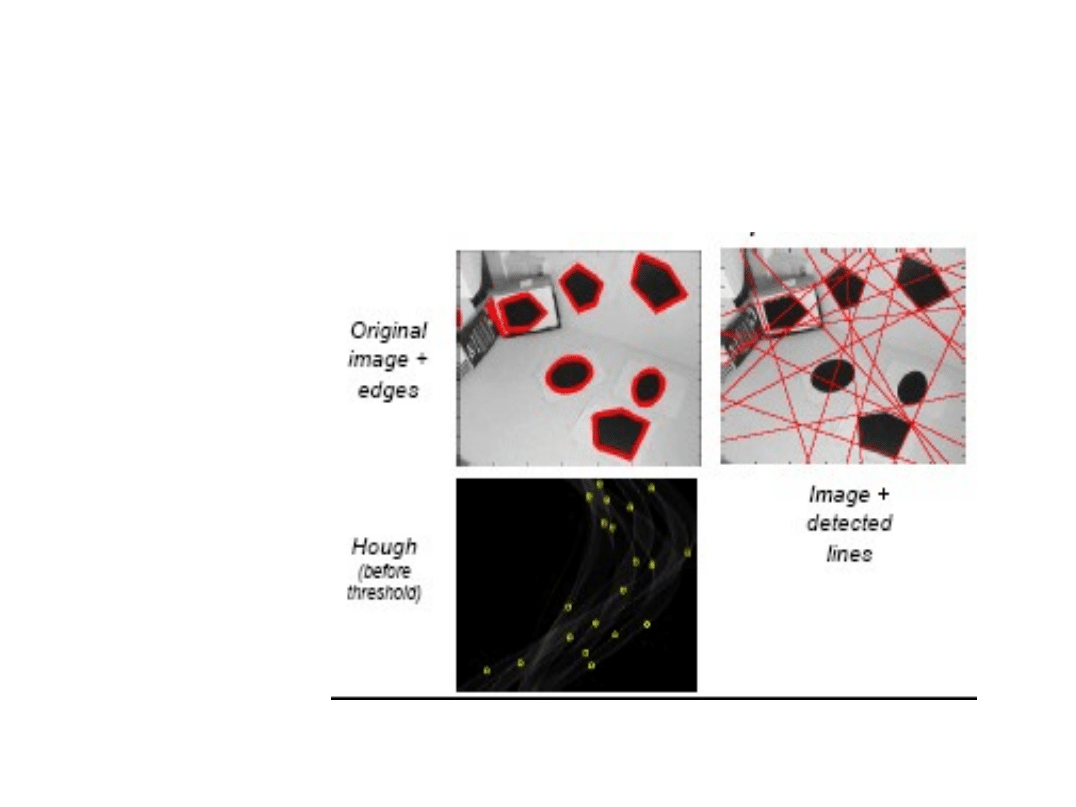
Hough Transform Line Detection
Example
Original Image
Notice: many non-
belonging edges
Edge Image
Computer Vision
Segmentation
37
Parameter
Space
Detected Lines
Hough Transform Line Detection
Example
Computer Vision
Segmentation
38
Hough Transform Line Detection
Example
Original
Image
Original Image
with
superimposed
Lines
Detected
Lines
Example:
Computer Vision
Segmentation
39
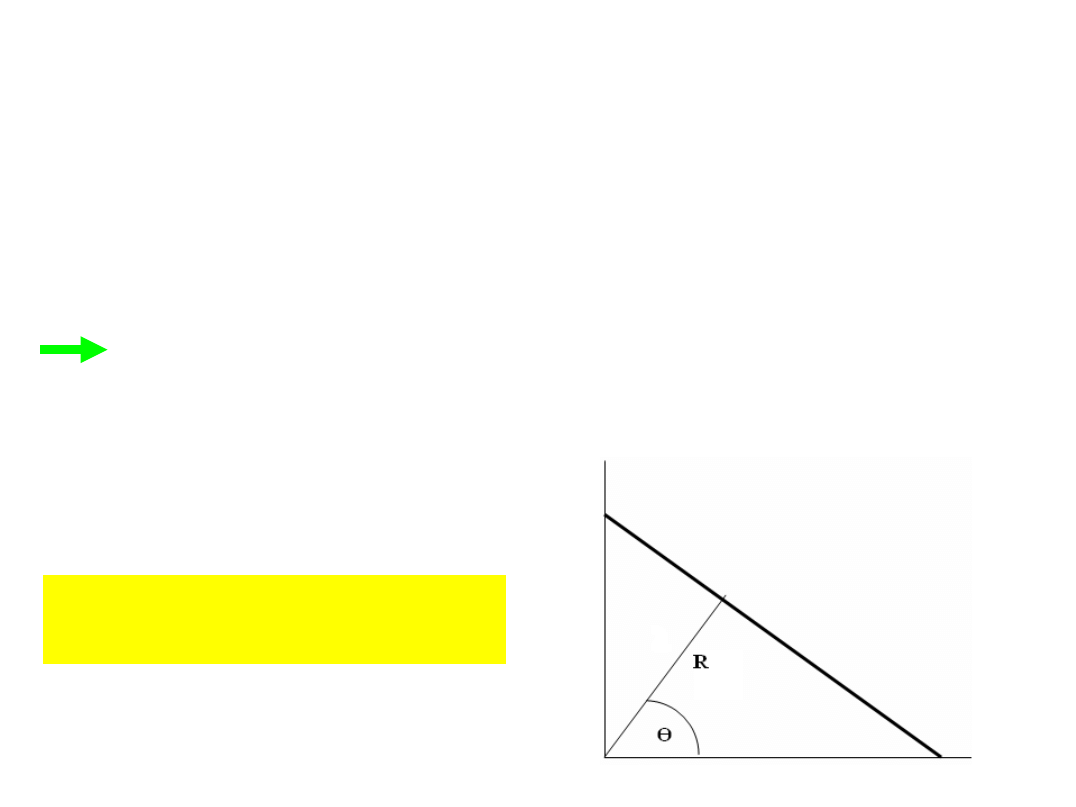
Line representation
Problem
: if line is vertical then
q =
∞
Solution:
use Normal representation:
R
y
x
sin
cos
Computer Vision
Segmentation
40
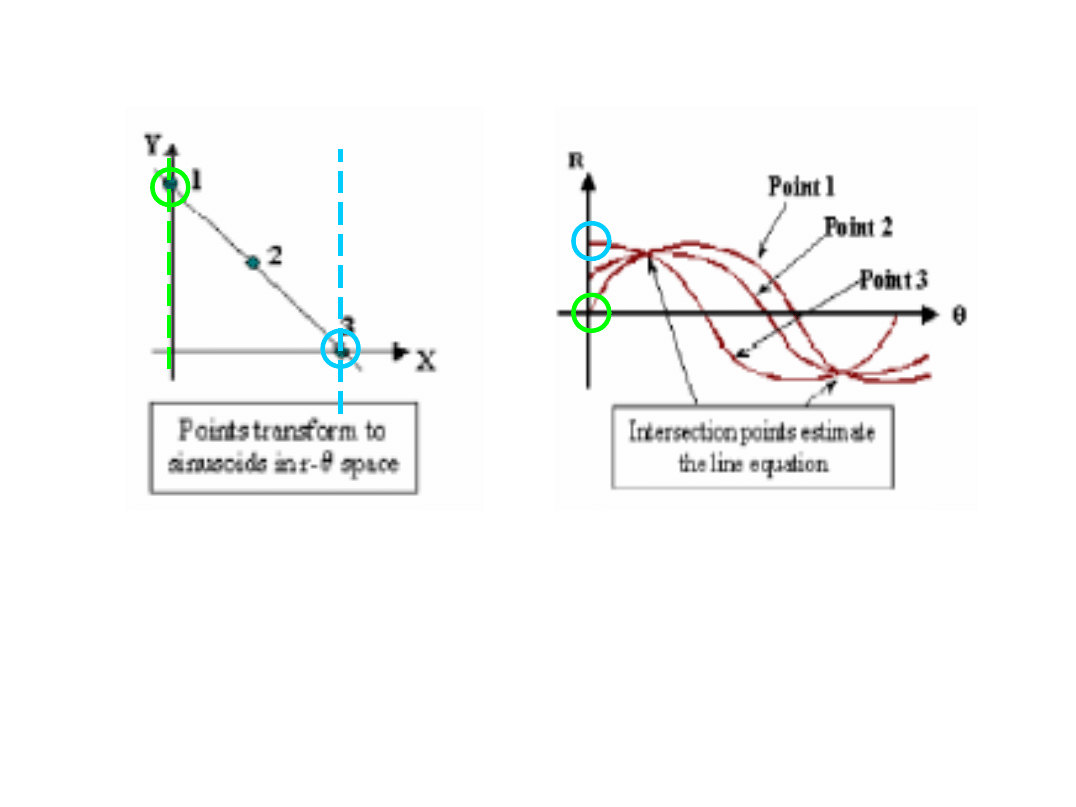
(cont) Line representation
The Normal representation approach is similar
BUT
:
•Loci are sinusoidal! i.e. each point in the x-y plane yields
one sinusoidal curve on the p-θ plane and
•m co-linear points in x-y plane yield m sinusoidal curves in
the p- plane intersecting at a certain p and θ corresponding
to the line connecting them.
•Range of θ is 0 to π
Computer Vision
Segmentation
41
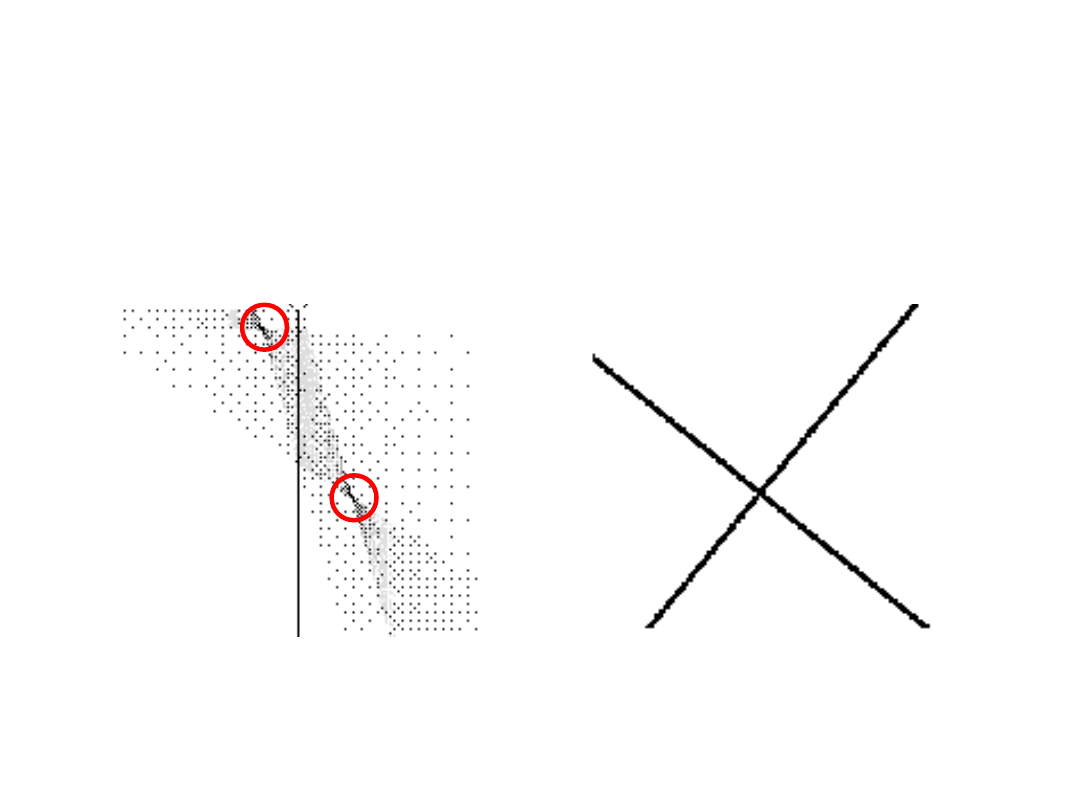
HoughTransform Example
Note:
Axis of R-θ parameter space is rotated 90
o
!
Computer Vision
Segmentation
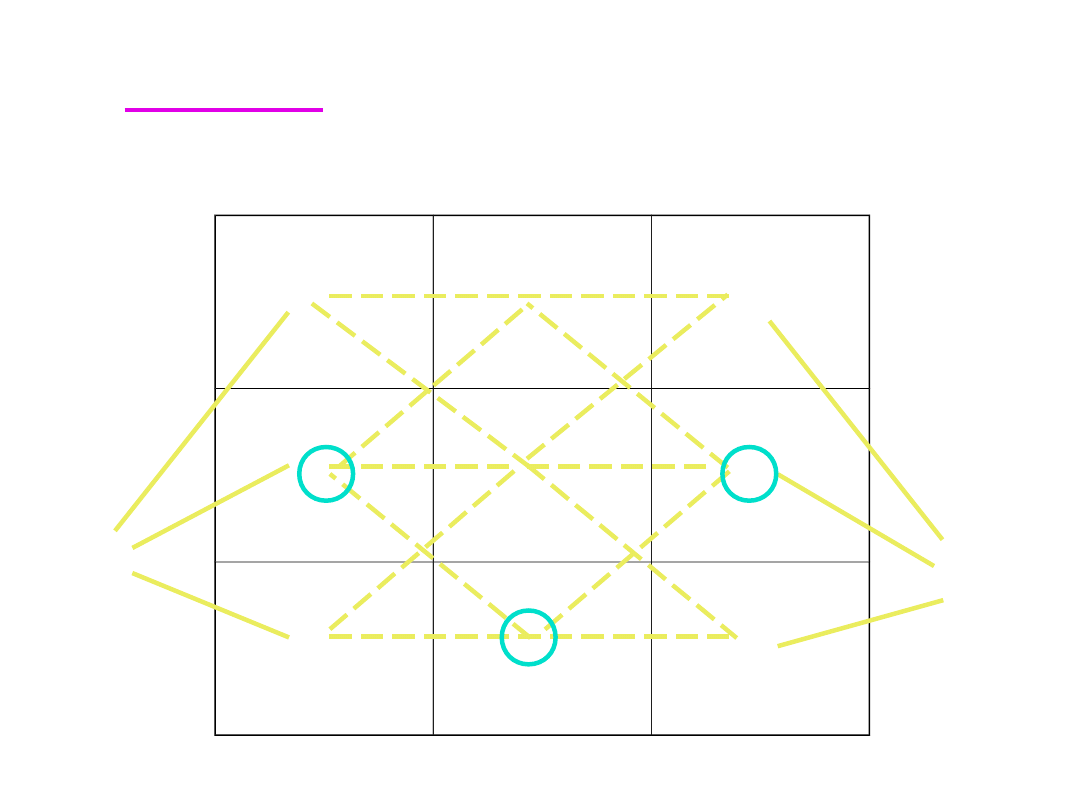
42
If looking for
circles
, instead of lines the analytic
expression is:
As there are
3 parameters
then the accumulator
data structure must be three dimensional, i.e.
the accumulator cell is A(a,b,r).
Hough Transform for Circle Detection
2
2
)
(
2
)
(
r
b
y
a
x

Computer Vision
Segmentation
43
Again the Hough transform is applied to each point
whose edge magnitude exceeds a certain threshold.
The processing results correspond to points of local
maxima of accumulator cells in the parameter space
a,b of the center point of the circle and the radius r.
If
the length of the
radius
of the circle searched
is
known
then we can deal with a 2-dimensional
parameter space (for center point coordinates a,b).
One
heuristic
may be used: to
weight the
contribution of
a point
to an accumulator cell by its
edge magnitude.
Algorithm:
Hough Transform
for Circle
Detection
Computer Vision
Segmentation
44
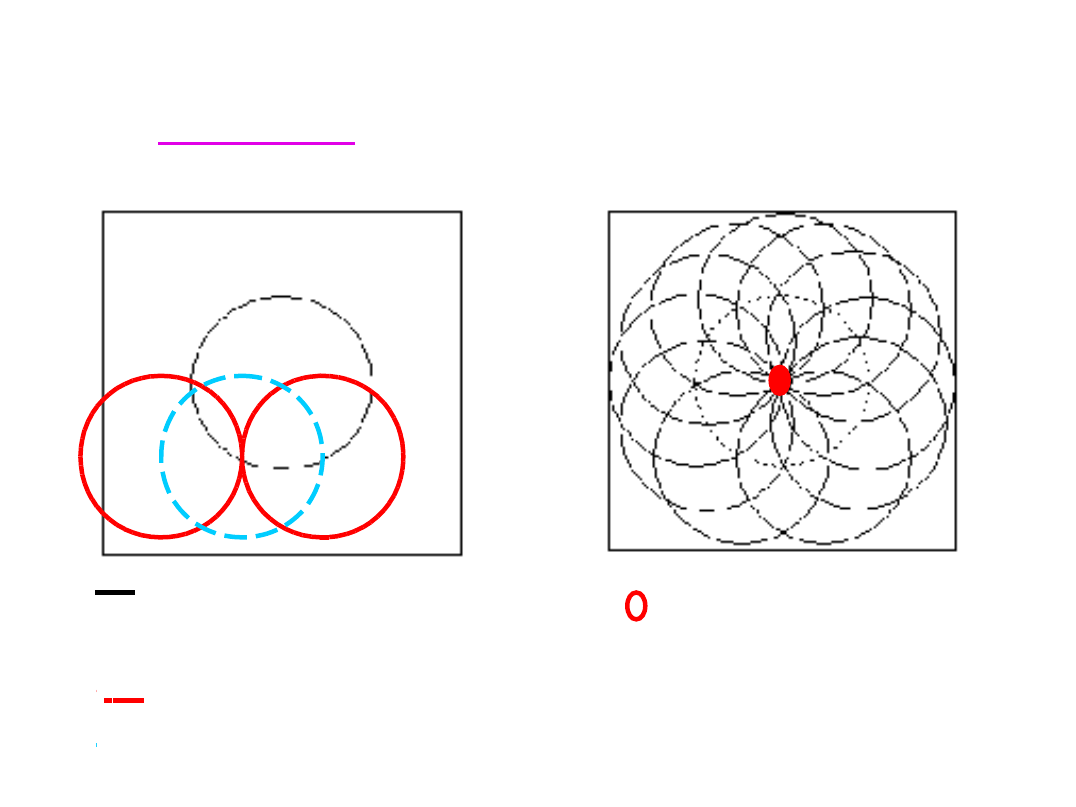
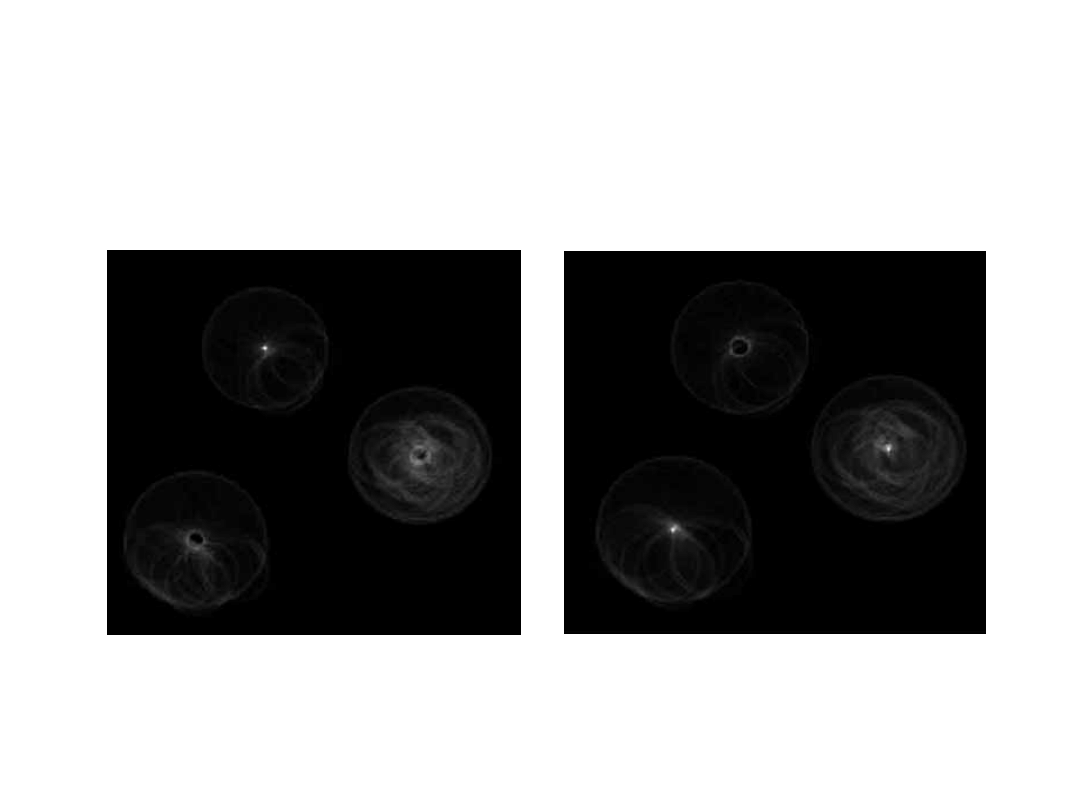
Demo:
Hough Transform
Original Circle
●
●
●
●
point on circle
circles passing through
point
loci of centers of circles passing through
point
Intersection of circles
specifies center of
original circle
●
point on circle
circles passing through
point
Computer Vision
Segmentation
45
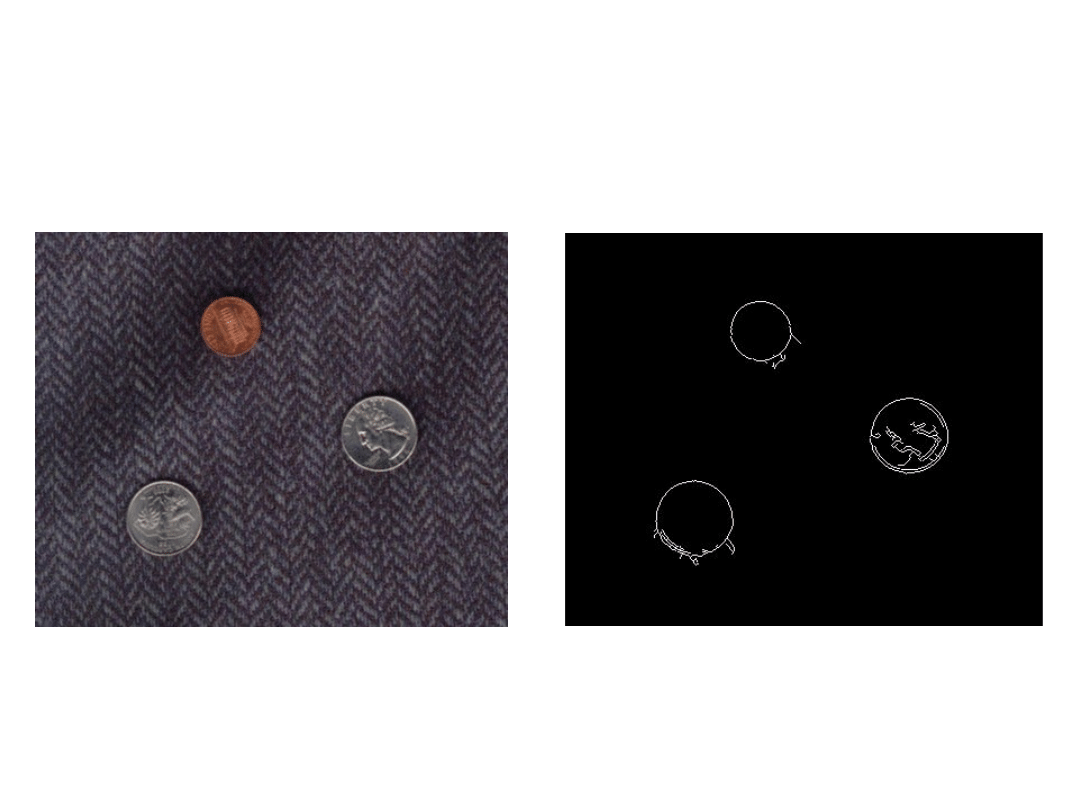
Hough Transform Example
Original Image
Edge Image
Computer Vision
Segmentation
46
HoughTransfor
m for Penny
HoughTransfor
m for Quarters
Hough Transform Example

Computer Vision
Segmentation
47
Detected Coins
Hough Transform Example
Document Outline
- Segmentation - Part 2 Edge-Based Segmentation Elsayed Hemayed Fall 2007
- Outline
- Edge-based Segmentation
- Edge Image Thresholding
- Edge Relaxation
- Slide 6
- Edge Types and its influence
- Algorithm: Edge Relaxation
- Effect of Edge Relaxation
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Algorithm: Inner Border Tracing (4-connectivity)
- Algorithm: Inner Border Tracing (cont.)
- Algorithm: Outer Border Tracing
- Slide 17
- Slide 18
- Algorithm: Extended Border Tracing
- Slide 20
- Slide 21
- Heuristic Graph Search
- Slide 23
- Slide 24
- Demo: Heuristic Graph Search
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Line representation
- Slide 40
- Slide 41
- Slide 42
- Slide 43
- Slide 44
- Slide 45
- Slide 46
- Slide 47
Wyszukiwarka
Podobne podstrony:
Computer Vision Thresholding Segmentation Technicque part1
Introduction Computer Vision
Image Procesing and Computer Vision part3
Doran Geometric Algebra & Computer Vision [sharethefiles com]
Lasenby GA a Framework 4 Computing Invariants in Computer Vision (1996) [sharethefiles com]
Manovich, Lev The Engineering of Vision from Constructivism to Computers
Computer Virus Propagation Model Based on Variable Propagation Rate
Formal Affordance based Models of Computer Virus Reproduction
A Novel Video Image Scaling Algorithm Based on Morphological Edge Interpolation
Science Photon based rather than electron based computers
Queuing theory based models for studying intrusion evolution and elimination in computer networks
(ebook english) TOEFL Preparing Students for the Computer Based Test
Computer Based Tester
Computer Based Tester Saratov
Resolution based metamorphic computer virus detection using redundancy control strategy
Komórkowe usługi EDGE
więcej podobnych podstron