
TEST z przedmiotu
ZAUTOMATYZOWANE
SYSTEMY STEROWANIA
2008-01-24

1-2
1.
Dynamiczny system to taki, który:
A. stan wyjścia zależy od stanu wejścia i od poprzednich
chwil czasowych wyjścia i wejścia
B. opisany jest równaniem y = x + 6
C. „jak przelewa się energia”
D. opisuje statykę i dynamikę
2.
Statyczny system:
A. otrzymujemy po przyrównaniu pochodnych do zera
B. otrzymujemy po przyrównaniu chwil czasowych do
jedności
C. otrzymujemy po przyrównaniu chwil czasowych do zera
D. otrzymujemy po przyrównaniu jednej strony równania
różniczkowego do zera

3-4
3. Dynamika w obiekcie opisanym równaniem
zależy od:
A. zmiennej
B. parametru konstrukcyjnego D w sposób liniowy
C. współczynnika D w sposób nieliniowy
D. współczynnika D w sposób liniowy
4. Stacjonarność w obiekcie opisanym równaniem
zależy od:
A. współczynnika k
B. zmiennej
C. parametru konstrukcyjnego D
D. zmienności w czasie współczynników
y
kx
Dx
mx
'
''
''
x
'
x
y
kx
x
t
D
mx
'
''

5-6
5. Zmienne w równaniu
zależą od:
A. czasu i opisują obiekt nieliniowy
B. są nieliniowe
C. uniemożliwiają jego rozwiązanie
D. są liniowe
6. Równanie opisuje obiekt:
A. niestacjonarny
B. nieliniowy
C. stacjonarny
D. liniowy
y
x
k
x
D
mx
3
'
2
''
y
x
k
x
D
mx
3
'
2
''

7-8
7. Równanie
opisuje obiekt:
A. liniowy, niestacjonarny, ciągły, dynamiczny
B. liniowy, stacjonarny, ciągły, dynamiczny
C. nieliniowy, niestacjonarny, ciągły, dynamiczny
D. nieliniowy, niestacjonarny, dyskretny, dynamiczny
8. Równanie
opisuje obiekt:
A. liniowy, niestacjonarny, ciągły, dynamiczny
B. nieliniowy, stacjonarny, ciągły, w którym mogą wystąpić
oscylacje
C. nieliniowy, niestacjonarny, ciągły, w którym mogą wystąpić
oscylacje
D. nieliniowy, niestacjonarny, dyskretny, dynamiczny
y
x
k
x
t
D
mx
3
3
'
2
''
y
x
k
x
D
3
3
'
2

9-10
9. Liniowość obiektu umożliwia:
A. dodawanie w równaniu współczynników do siebie
B. zastosować zasadę superpozycji
C. dodawanie w równaniu parametrów do siebie
D. dodawanie zmiennych i ich pochodnych do siebie
10. Ciągły obiekt to taki, który (którego):
A. czas próbkowania dąży do nieskończoności
B. nie zależy od czasu próbkowania
C. czas próbkowania dąży do zera
D. zależy od czasu próbkowania
11-12
11. Obiekt opisany równaniem różnicowym
A. jest nieliniowy
B. jest niestacjonarny
C. jest ciągły
D. jest dynamiczny
12. Za pomocą transmitancji s lub z możemy opisać
obiekt:
A. dynamiczny
B. liniowy
C. nieliniowy
D. statyczny
1
2
1
2
1
,
0
i
i
i
i
i
m
x
t
x
x
m

13-14
13.
System jest obserwowalny wtedy, jeżeli:
A. zapala się zielona lampka RUN w sterowniku (PLC)
B. w przebiegu wyjściowym występują wszystkie zmienne stanu
C. na podstawie sygnału wyjściowego możemy określić stan
obiektu w dowolnej chwili w przeszłości
D. jeden ze współczynników w macierzy A jest zależny od czasu
14.
System jest sterowalny wtedy, jeżeli:
A. możemy za przyspieszenie podstawić prędkość
B. w skończonym czasie jesteśmy w stanie przeprowadzić go do
dowolnego punktu w przestrzeni
C. jesteśmy w stanie oddziaływać za pomocą sygnału
sterującego na wszystkie składowe występujące we
współrzędnych stanu
D. wyznaczyć dobre sterowanie (spełniające narzucone
kryterium jakości sterowania)

15-16
15. Zachowanie obiektu dynamicznego można
opisać za pomocą
:
A. równania różniczkowego
B. równania algebraicznego
C. nieliniowego równania różnicowego
D. równań stanu
16. Transmitancje dyskretne
i opisują
:
A. dwa różne obiekty
B. ten sam obiekt
C. ten sam obiekt ale z opisem uwzględniającym
przesunięcie do przodu o dwie próbki
D. ten sam obiekt ale z opisem uwzględniającym
przesunięcie do tyłu o dwie próbki
2
1
1
1
5
,
0
1
5
1
)
(
z
z
z
z
G
2
2
5
,
0
1
)
5
(
)
(
z
z
z
z
z
G

17-18
17. Jaka jest różnica pomiędzy algorytmem
prędkościowym a przyrostowym ?
A. przyrostowy ma całkowanie w sobie
B. pierwszy nie ma całkowania a drugi ma
C. nie ma różnicy
D. prędkościowy nadaje się do wpisania do sterownika a
przyrostowy nie jest przystosowany
18. Model ARMA :
A. jest najpopularniejszym modelem
B. nie zawiera części autoregresyjnej
C. zapewnia dobre wygładzanie nawet przy małej liczbie
elementów
D. jest filtrem

19-20
19. W systemie rozproszonym:
A. sterownik można odłączyć na pewien czas od modułu
komunikacyjnego bez utraty danych
B. komputery (sterowniki) można połączyć w sieć
C. możliwe jest, ze jak komputer (sterownik) się uszkodzi
to sąsiedni przejmie jego zadania
D. dane w sterownikach przewodowo można przesyłać na
odległości większą niż 100 km
20. Sieć przemysłowa powinna cechować się:
A. tylko połączeniem pierścieniowym
B. większą odpornością na zakłócenia przemysłowe
C. tylko protokołem komunikacyjnym Ethernet Industrial
D. wymogiem pracy w czasie rzeczywistym

21-22
21.
Czy w języku maszynowym widoczne są:
A. rozkazy
B. instrukcje
C. polecenia
D. kody, listy rozkazów procesora
22.
Czy w języku symbolicznym niższego poziomu
stosujemy:
A. instrukcje
B. rozkazy
C. polecenia
D. zakazy

23-24
23. Oprogramowanie po uruchomieniu musi być:
A. dynamiczne
B. jednoznaczne
C. kompletne
D. dychotomiczne
24. Po faktoryzacji transmitancja jest:
A. mniej przejrzysta
B. lepiej są widoczne bieguny i zera
C. stabilna
D. minimalnofazowa

25-26
25. Zastosowanie układu regulacji z regulatorem
typu P:
A. likwiduje uchyb ustalony
B. ogranicza zmienność parametrów
C. likwiduje wpływ zakłóceń
D. zwiększając wartość współczynnika wzmocnienia (P)
zwiększa się uchyb ustalony
26. Sterowanie adaptacyjne stosujemy gdy obiekt:
A. ma duże stałe czasowe
B. ma duży czas opóźnienia
C. jest nieliniowy
D. jest niestacjonarny

27-28
27. Sterownik kompaktowy to taki, który:
A. przystosowany jest do ognioszczelnych obudów
B. może być stosowany jako inteligentny przekaźnik
C. ma wiele zaawansowanych cech dużego sterownika w
stosunkowo tanim i małym sterowniku
D. można go programować w języku C++
28. Zjawisko stroboskopowe:
A. to jest to samo co aliasing
B. pokazują się w sygnale wyjściowym wysokie
częstotliwości
C. to należy zmniejszyć częstotliwość próbkowania
D. to należy zwiększyć częstotliwość próbkowania
29-30
29. Program do sterownika powinien:
A. mieć mniej więcej równą liczbę czasówek i zegarów
B. dla szczebla drabinki powinien mieć strukturę trójkąta od
największej liczby styków do mniejszej
C. mieć jak najmniej instrukcji do komunikacji miedzy
sterownikami
D. im większą liczbą instrukcji rozwiążemy dane zadanie tym
program będzie lepszy
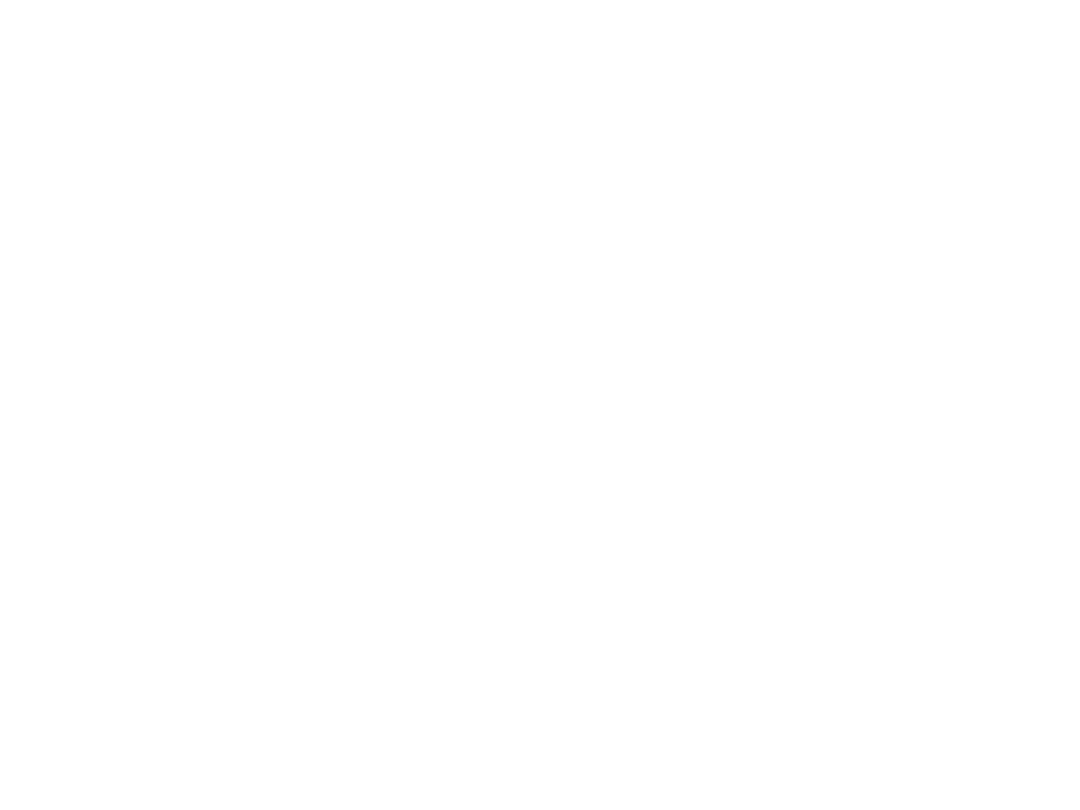
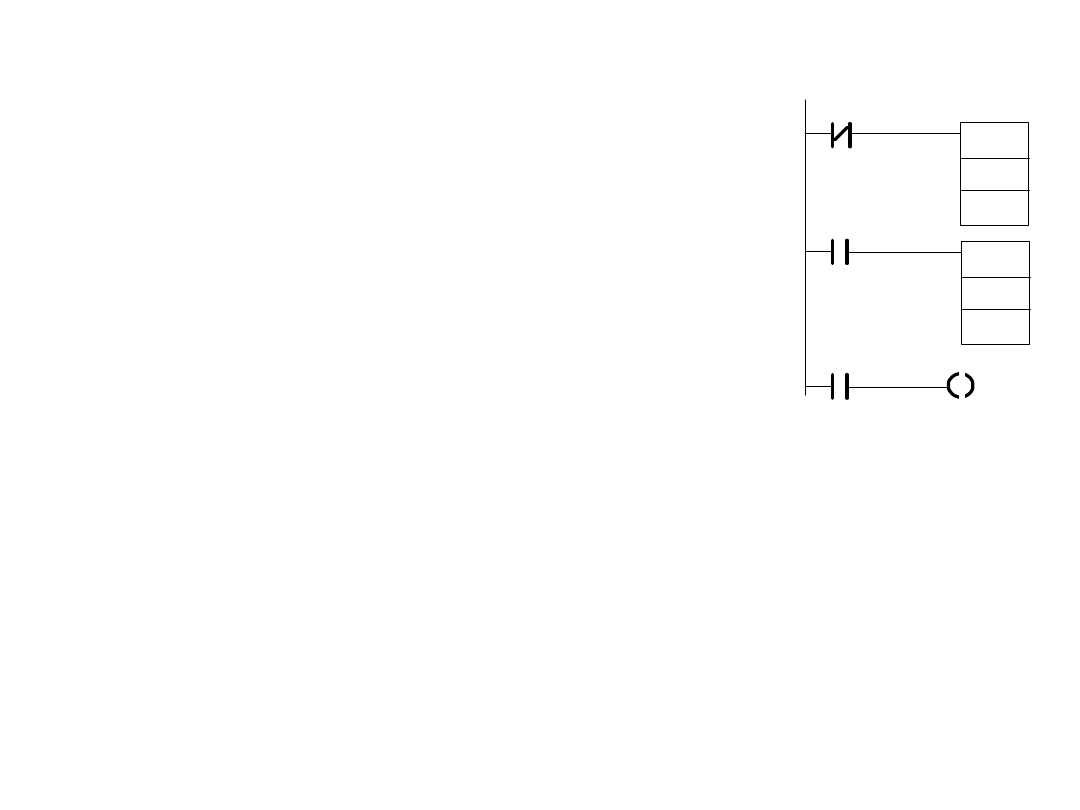
30. W generatorze impulsów jak na rysunku należy
wstawić na górze:
A. styk normalnie otwarty z adresem TIM2
a na dole TIM1
B. styk normalnie otwarty z adresem TIM1
a na dole TIM2
C. styk normalnie zamknięty z adresem TIM1
a na dole TIM2
D. styk normalnie zamknięty z adresem TIM2
a na dole TIM1
PV
TIM
001
# 0010
0010 bcd
10.00
0.3
TIM 1
SV=
1
s
PV
TIM
002
# 0020
0020 bcd
?
SV=
2 s
?

31-32
31. Układ zatrzaskowy, z samopodtrzymaniem:
A. stosuje się w przerzutnikach aby nie zmieniały stanu
B. umożliwia załączać urządzenia połączone z wyjściami
sterownika bez uciążliwego trzymania przycisku START
C. może być zrealizowany na układach pamięciowych SET i
RSET
D. kolejność instrukcji w nim nie wpływa na priorytet załączania
lub wyłączania
32. Jak w licznikach eliminuje się „drgania” styków aby
nie zliczały tych drgań:
A. równolegle podłącza się diodę rozładowczą z cewką
B. dodaje się na wejście dodatkową indukcyjność
C. wprowadza się minimalną długość trwania stanu jedynki, aby
uznać ten stan za poprawny
D. po zliczeniu odejmuje się liczbę niepotrzebnych „drgań”
33-34
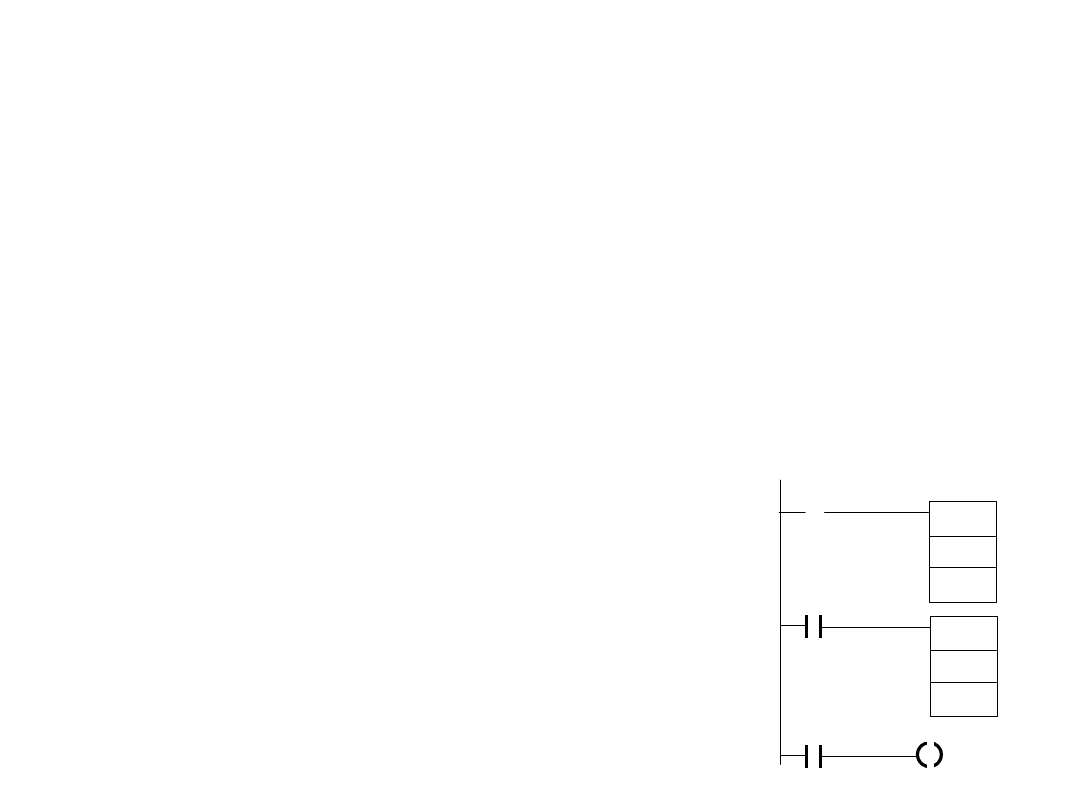
33. Podtrzymanie działania styku START powinno być:
A. STOP
B. SILNIK
C. zanegowany STOP
D. zanegowany SILNIK
34. Powyższy obwód dotyczy:
A. priorytetu na działanie styku START
B. gdy styk STOP w obiekcie jest NC
C. gdy styk STOP w obiekcie jest NO
D. priorytetu na działanie styku STOP
START
?
SILNIK
STOP

35-36
35. Sygnał deterministyczny:
A. wystarczy opisać parametrami statystycznymi (wartością
średnią, wariancją itd.)
B. jest powtarzalny dla tego samego wymuszenia i
zakłócenia
C. da się opisać równaniem różniczkowym
D. da się opisać równaniem różnicowym o stałych
współczynnikach
36. Jeżeli tor pomiarowy jest sprzężeniem zwrotnym to:
A. powinien mieć większe wzmocnienie niż tor główny
B. zaczynać się od węzła sumacyjnego a kończyć na wyjściu
C. być maksymalnie odpornym na wpływ zakłóceń
D. zaczynać się od wyjścia a kończyć na węźle sumacyjnym

37-38
37. Aby dobrać nastawy regulatora PID niezbędny jest:
A. schemat blokowy obiektu
B. wstępna znajomość parametrów regulatora
C. w układzie zamkniętym pozostawić tyko wzmocnienie
i zwiększać go do wystąpienia oscylacji
D. w układzie otwartym określić wartości opóźnienia L
i dominującej stałej czasowej Tp i z tablic dobrać nastawy
38. Do oceny układu regulacji niezbędna jest znajomość:
A. parametrów nastaw regulatorów PID
B. czy układ jest stabilny
C. czy uchyb ustalony zmierza asymptotycznie do
nieskończoności
D. czy układ jest wrażliwy na zmianę pogody

39-40
39. Czy wskaźniki całkowe są:
A. funkcjonałami
B. nie informują o wartości uchybu ustalonego
C. nadają się tyko dla stanów ustalonych
D. nadają się tyko dla stanów nieustalonych,
przejściowych
40. Jedno wyjście cyfrowe (dwustanowe) w
sterowniku umożliwia sterowanie:
A. zmianą kierunków obrotu bez dodatkowego elementu
B. zadowalająco obiektem o dużej stałej czasowej
C. pracą trzystanowego urządzenia
D. grzałką, która stabilizuje temperaturę w zbiorniku
41-42
41.
Szeregowe połączenie regulatorów wymaga, aby:
A. pętle sprzężeń zwrotnych się krzyżowały
B. stała czasowa pętli wewnętrznej musi być większa od stałej
czasowej pętli zewnętrznej
C. stała czasowa pętli wewnętrznej musi być mniejsza od stałej
czasowej pętli zewnętrznej
D. regulatory były tego samego typu np. PI
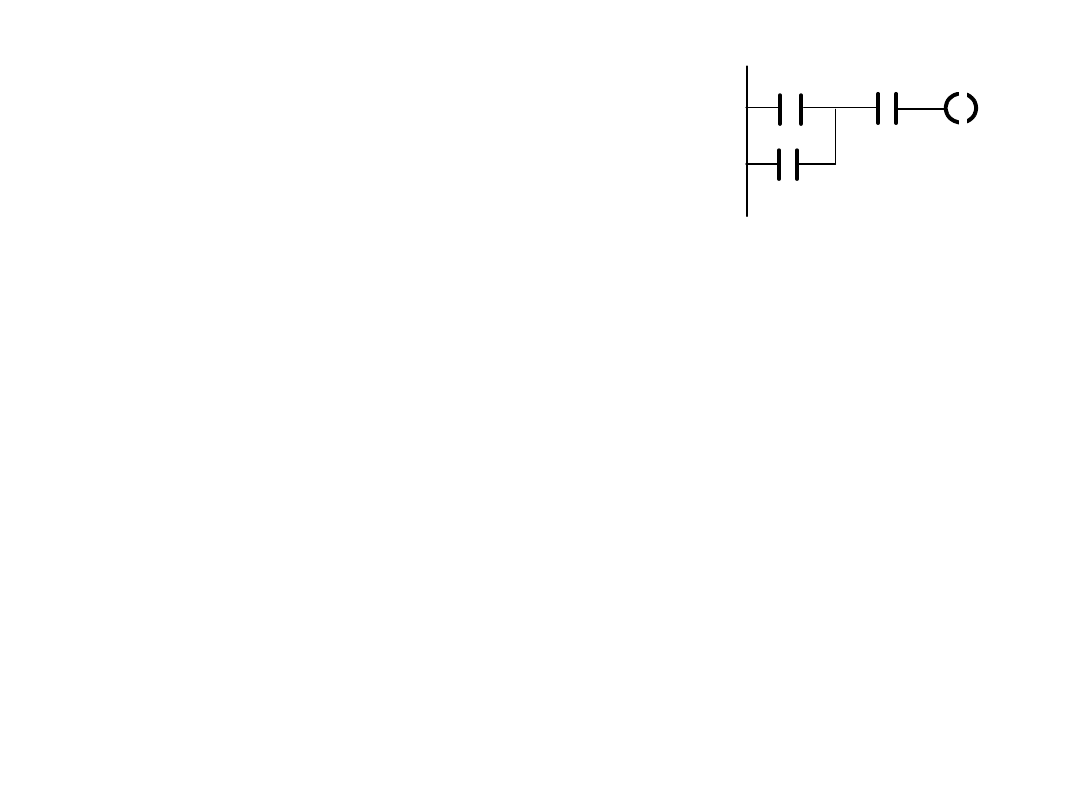
42.
Impuls 9.1 na rysunku:
A. czas wypełnienia wynosi 10% czasu 0,1 sekundy
B. może służyć do synchronizacji czasowej jako czas
próbkowania
C. musi być dłuższy od czasu cyklu programu
D. ma czas trwania równy cyklowi programu
255.00
Impuls 0,1 s
MOV (21)
110
DM0006
y
0
DIFU(13) 9.1
9.1
0,1 s
Co 0,1 s impuls o czasie ?
t
t
9.1
255.00
43-44
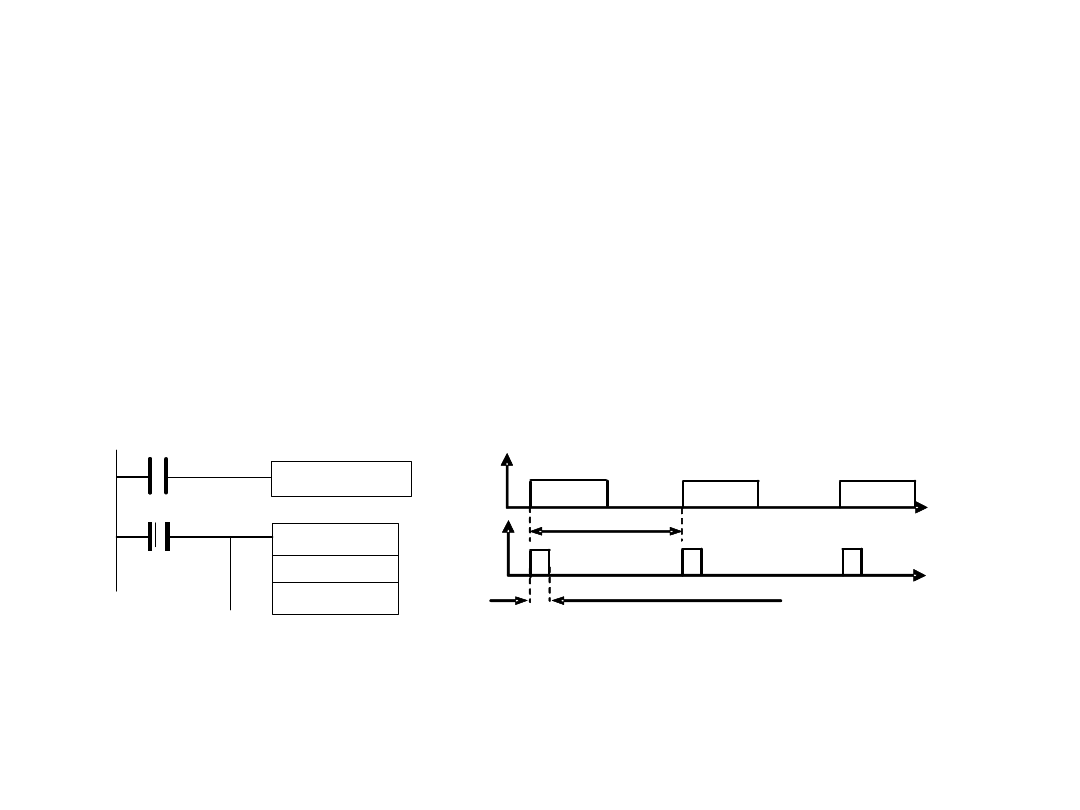
43. Na zamieszczonym schemacie zegar TIM2:
A. będzie w stanie jedynki przez 2 sekundy
B. będzie w stanie jedynki przez 10 sekund
C. będzie w stanie jedynki przez czas jednego cyklu
D. będzie w stanie jedynki przez 1 sekundę
44. Przy priorytecie dla warunku STOP, równoczesne
naciśnięcie przycisku START I STOP powoduje:
A. załączenie wyjścia
B. dla instrukcji SET i RSET o stanie wyjścia decyduje ostatni
wypracowany warunek (RLO)
C. wyłączenie wyjścia
D. awarię w pracy sterownika
PV
TIM
001
# 0010
0010 bcd
10.00
0.3
TIM 1
SV=1 s
PV
TIM
002
# 0020
0020 bcd
TIM 1
SV=2 s
TIM 2

45-46
45. Czy omronowski zegar bez dodatkowych
warunków jest układem, który:
A. przechodzi w stan wysoki po zadanym czasie i
wyłącza się po 10 ms
B. przechodzi w stan niski po zadanym czasie
C. ma stan wysoki przez zadany czas
D. przechodzi w stan wysoki po zadanym czasie
46. Dane w sieci komputerowej, gdy przechodzą
z górnych warstw do dolnych to:
A. „przybierają” na objętości
B. pozostają zawsze stałe
C. powinny być w każdej warstwie kontrolowane na
parzystość lub inną kontrolę
D. operator może zmieniać ramki

47-48
47.
Główną wadą wyjść przekaźnikowych
w sterownikach jest:
A. wytrzymałość mechaniczna rzędu tylko 10 000
przełączeń
B. brak izolacji pomiędzy sterownikiem a elementem
wykonawczym
C. zbyt długi czas przełączenia często dłuższy od czasu
cyklu np. 2 ms
D. mała odporność na zakłócenia elektromagnetyczne
48.
Przy stosowaniu algorytmu prędkościowego
obiekt musi być:
A. nieliniowy
B. całkujący
C. odporny na zakłócenia
D. niestacjonarny

49-50
49. Układ regulacji traktujemy jako jednowymiarowy
typu SISO a mamy dwa wejścia: zadające i
zakłócające:
A. bo zakładamy, że zakłócenie jest pomijalne
B. bo zakłócenie oddziałuje w innym miejscu, nie na
wejściu
C. bo zakładamy, że zakłócenie jest stałe lub typu białego
szumu
D. bo znamy skomplikowany przebieg zakłócenia
50. Czas próbkowania można określić :
A. z najwęższego impulsu w przebiegu
B. na podstawie wartości częstotliwości granicznej
C. z przeregulowania
D. z wartości uchybu ustalonego

51-52
51. Synchronizacja z czasem rzeczywistym
(próbkowanie):
A. umożliwia przerzutnikom zmieniać stan co cykl
B. umożliwia przełączać licznik w początku czasu próbkowania
C. umożliwia utrzymanie stałych wartości współczynników
równania, niezależnych od czasu próbkowania
D. umożliwia zsynchronizowanie się z zegarami znajdującymi
się w programie
52. Gdy zwłoka czasowa wynosi L to czas próbkowania
powinien:
A. być równy L
B. być równy 0,1 L
C. być równy 1/3 L
D. być równy ½ L

53-54
53. Modulacja:
A. szerokości impulsów (PWM) i czasu trwania (PDM) to nie
te same typy
B. cyfrowa nie umożliwia przesyłanie sygnału o stałej
wartości
C. umożliwia przesłanie sygnału na dużą odległość
D. analogowa sinusoidy nie jest możliwa, gdyż podczas tego
procesu również sinusoidalny sygnał jest stosowany
54. Enkoder:
A. bezwzględny 12 bitowy nie wykrywa kierunku
B. przyrostowy nie wykrywa kierunku
C. rewersyjny nie wykrywa kierunku
D. bezwzględny nie stosuje kodu Gray’a

55-56
55. Przerwania:
A. na różnych wejściach (sprzętowe) ich priorytet nie zależy
od numeru wejścia
B. szybkie licznikowe mają wyższy priorytet niż sprzętowe
C. sprzętowe maja wyższy priorytet niż czasowe
(programowe)
D. dla kilku urządzeń mają priorytety od najniższego numeru
wejścia do najwyższego
56. Na długość czasu cyklu sterownika ma wpływ:
A. stała czasowa obiektu sterowania
B. długość programu
C. liczba urządzeń peryferyjnych obsługiwanych przez
sterownik
D. temperatura otoczenia

57-58
57.
Czas cyklu jest w stosunku do czasu odpowiedzi:
A. taki sam
B. dłuższy o 10 ms
C. nieprecyzyjnie dłuższy o 1,5÷2,5 cyklu
D. pomijalnie krótki
58.
Jeżeli w programie uruchamiane są np. dwa
wyjścia (cewki) o tych samych adresach to:
A. załączy się druga a nie pierwsza
B. o stanie cewki decyduje ostatni wyliczony wynik
operacji logicznej
C. załączy się pierwsza a druga nie
D. wystąpi ostrzeżenie w sterowniku

59-60
59. W kodzie BCD pojemność licznika to 9 999:
A. jego pojemność możemy zwiększyć przechodząc na
zapis binarny
B. nie wymaga zerowania
C. można zastosować bit CARRY (przeniesienia) do
zwiększenia pojemności
D. najczęściej minimalny czas trwania impulsów
wejściowych ustawiony jest na około 8 ms
60. Symulator sterownika umożliwia:
A. sprawdzić program bez posiadania sterownika
B. umożliwia podłączenie do Twojego PC sterownika
C. wykorzystać model (symulator) w innych programach
D. tylko on monitorować stany styków podczas pracy
sterownika

61-62
61. Regulator Smitha stosuje się dla układów:
A. o dużej dominującej stałej czasowej
B. z dużym czasem opóźnienia
C. niesterowalnych
D. z dużą histerezą
62. Superkomputery stosuje się:
A. tylko do gry w szachy
B. do obliczania wartości Flopów
C. do obliczania macierzy co najmniej 1 000 na 1 000
D. z systemem operacyjnym Windows

63-64
63. Sterowanie zaawansowane:
A. utrudnia sterowanie ręczne
B. stosuje się do dostrajania nastaw regulatora PID
C. zmniejsza straty podczas produkcji i podnosi jakość
wyrobu
D. nie stosuje identyfikacji do określenia optymalnego
sterowania
64. Bifurkacja przyczynia się do:
A. zwiększenia prędkości obiektu
B. rozdwojenia rozwiązania równania liniowego
C. rozgałęzienie rozwiązania na skutek zmiany parametru
D. zmniejszenia wartości parametru bifurkacyjnego

65-66
65. Chaos występuje gdy:
A. mała zmiana warunków początkowych powoduje bardzo
duże zmiany wyjścia
B. mamy do czynienia z liniowymi algebraicznymi
równaniami
C. mamy do czynienia z nieliniowymi równaniami
różniczkowymi lub różnicowymi
D. układ zbliża się do granicy stabilności
66. Przy użyciu implikacji (JEŻELI - TO) można:
A. opisać działanie każdego układu
B. zbudować bazę wiedzy do regulatora rozmytego
C. dobrać nastawy regulatora PID
D. zlikwidować uchyb regulacji

67-68
67. Zagęszczenie funkcji przynależności:
A. może być stosowane tylko w modelu Mamdaniego
B. utrudnia pisanie reguł
C. zwiększa w tym obszarze wrażliwość na sygnał wejściowy
D. stosuje się dla układów przełączających
68. Regulator rozmyty w stosunku do klasycznego PID:
A. nie generuje fałszywych sygnałów w stanach
przejściowych
B. może regulować obiektem nieliniowym
C. może regulować obiektem niestacjonarnym
D. ma bazę wiedzy, która jest zawsze pełna i precyzyjna

69-70
69. Adresowanie pośrednie z rejestrami indeksowymi:
A. wyklucza obliczenia na macierzach
B. jest przydatne dla obiektów o dużych stałych czasowych
C. umożliwia realizować skomplikowane obliczenia na
tablicach danych
D. korzysta z pamięci podręcznej
70. Po wprowadzeniu wskaźnika instrukcją MOVR 3
IR2 co się stanie po instrukcji MOV #5 ,-IR2
A. uruchomi się w sterowniku wyjście 3.1 i 3.2
B. uruchomi się w sterowniku wyjście 2.5
C. uruchomi się w sterowniku wyjście 3.1 i 2.14
D. uruchomi się w sterowniku wyjście 2.0 i 2.2

71-72
71. Bezszwowe komunikacyjne systemy sterownikowe
polegają na:
A. wyeliminowaniu potrzeby stosowania mastera w sieci
B. możliwościach komunikacyjnych, które wzajemnie się nakładają
C. wyeliminowaniu stosowania modułu komunikacyjnego w
sterowniku
D. złagodzeniu kolizji pomiędzy pakietami i komórkami w protokole
komunikacyjnym
72. Urządzenia peryferyjne można połączyć ze sterownikiem
w celach komunikacyjnych kabelkiem do RS 232C
A. po wybraniu z biblioteki gotowego bloku funkcji
B. po dokonaniu ustawień w set-upie sterownika
C. po wcześniejszym odłączeniu od laptopa
D. po napisaniu protokołu komunikacyjnego w CX-Protocol

73-74
73.
Rynek zdominowały superkomputery o architekturze:
A. jednoprocesorowej i szybkim połączeniu między nimi
B. klastrowej i konstelacyjnej
C. wieloprocesorowej typu MIMD
D. wektorowej
74.
Dlaczego w przyciskach bezpieczeństwa zaleca się
stosować styki normalnie zamknięte?
A. bo są większość czasu zwarte i nie utleniają się w miejscu
styku
B. przerwa w okablowaniu natychmiast objawia się wyłączeniem
C. bo sprężyna w nich występująca nie ulega szybkiemu zużyciu
D. podczas zadziałania przycisku łuk prądowy mniej niszczy styki

75-76
75. Czy program w języku tekstowym do sterownika
można pisać w Wordzie?
A. nie można
B. można
C. jest celowe
D. tak, ale bez znaku średnika „;”
76. Na sprzęcie podawana jest dwucyfrowa klasa
zabezpieczenia obudowy IP.
A. pierwsza cyfra dotyczy wielości otworów zabezpieczających
od wody a druga od pyłów i obcych ciał stałych
B. im klasa niższa tym lepiej zabezpieczone jest urządzenie
C. pierwsza cyfra dotyczy wielości otworów zabezpieczających
od pyłów i obcych ciał stałych a druga od wody
D. im klasa wyższa tym lepiej zabezpieczone jest urządzenie

77-78
77.
Czym się różni w sterownikach ALARM od BŁĘDU?
A. to jest to samo
B. ALARM wyłącza sterownik a BŁĄD pokazuje się w oknie
edycyjnym
C. ALARM informuje a BŁĄD wyłącza sterownik
D. ALARM wyłącza sterownik i informuje o przyczynie a BŁĄD po
kompilacji pokazuje się w oknie wyjściowym
78.
W jaki sposób stosując regulator PID do sterowania
obiektem nieliniowym uzyskać zadowalającą jakość
sterowania?
A. zlinearyzować obiekt
B. podzielić zakres sterowania na przedziały i np. regulatorem
rozmytym zmieniać odpowiednio przedziały
C. zastosować układ adaptacyjny i zmieniać nastawy regulatora
wraz ze zmianą punktu pracy
D. regulator PID stosować można tylko dla obiektów liniowych

79-80
79. Najlepszego programistę można poznać po:
A. po jego samochodzie
B. po rzadkim stosowaniu instrukcji MOV
C. najkrótszym kodzie wynikowym i oprogramowaniu
jednoznacznym i kompletnym
D. liczbie użytych podprogramów
80. Jak wydrukować raporty o produkcji ze sterownika?
A. podłączyć drukarkę do wyjścia cyfrowego (drukarka musi
być przystosowana do współpracy ze złączem szeregowym)
B. jeżeli korzystamy z ekranu LCD to mają one złącze
szeregowe i można wydrukować ekrany
C. jeżeli jesteśmy podłączeni sterownikiem do sieci to z
komputera z oprogramowaniem SCADA
D. jeżeli sterownik ma USB to automatycznie drukują się pliki z
raportami

Dziękuję za napisanie testu !
Document Outline
- Slide 1
- Slide 2
- Slide 3
- Slide 4
- Slide 5
- Slide 6
- Slide 7
- Slide 8
- Slide 9
- Slide 10
- Slide 11
- Slide 12
- Slide 13
- Slide 14
- Slide 15
- Slide 16
- Slide 17
- Slide 18
- Slide 19
- Slide 20
- Slide 21
- Slide 22
- Slide 23
- Slide 24
- Slide 25
- Slide 26
- Slide 27
- Slide 28
- Slide 29
- Slide 30
- Slide 31
- Slide 32
- Slide 33
- Slide 34
- Slide 35
- Slide 36
- Slide 37
- Slide 38
- Slide 39
- Slide 40
- Slide 41
- Slide 42
Wyszukiwarka
Podobne podstrony:
TEST ZSP i KSS (80)
w 80 dni dookola swiata - test, Lektury SP scenariusze lekcji
TEST tabela ZSP-roz80, Zautomatyzowane Systemy Produkcyjne
w 80 dni dookola swiata - test, Lektury SP scenariusze lekcji
p 80 test 3 speaking
p 80 speaking test 3 5
test z lektury w 80 dni dookoła świata chomikuj
TEST ZE ZNAJOMOŚCI LEKTURY w 80 dni dookoła
TEST NR 5
test dobry
test poprawkowy grupa 1
TEST zalicz mikroskopia czescETI z odpowiedz
Zajecia 6 7 Test Niedokonczonych Zdan
plik (80) ppt
etyka test
Test osobowości Dalajlamy
więcej podobnych podstron