1
PRACA I ENERGIA
Praca
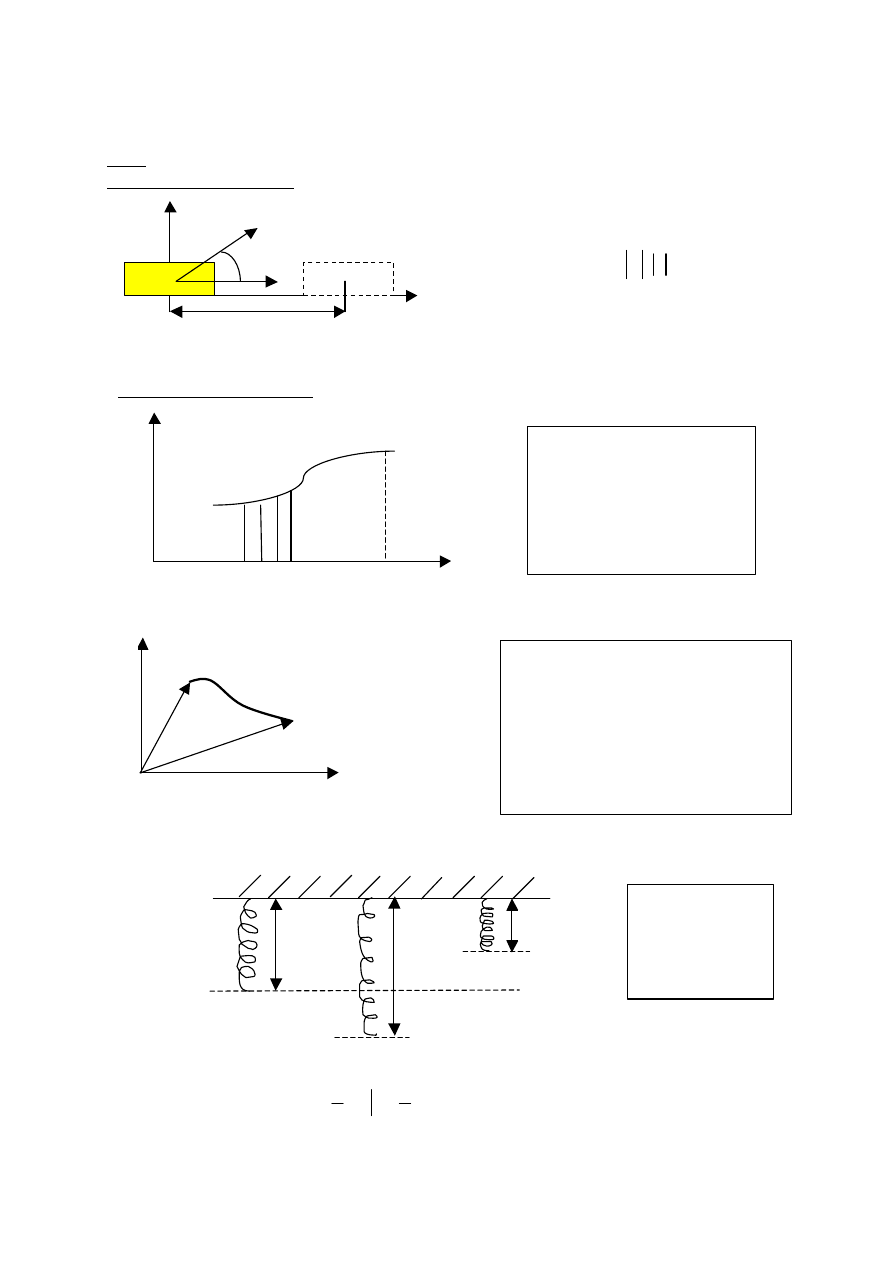
- wykonana przez stala sile.
- wykonana przez sile zmienna
Ogólnie – prace sily na pewnym odcinku drogi definiujemy
W szczególnym przypadku
W = F · r
F = const, r - droga – linia prosta majaca kierunek sily
Przyklad - sprezyna przymocowana do sciany.
F’(x) – sila przeciwnie skierowana do sily sprezystosci F(x) dla x
1
= 0 i x
2
= x,
W
12
=½kx
2
r
2
r
1
F
x
y
x
0
x
x
a Fcosa
d
F
x
2
F(x)
? x
x
1
x
∆
W = F
∆
x
∑
∆
=
2
1
12
x
x
x
F
W
r
r
∫
∑
=
∆
=
→
∆
2
1
2
1
0
12
lim
x
x
x
x
x
Fdx
x
F
W
∫
⋅
=
2
1
r
r
r
d
F
W
r
r
r
1
– wektor wodzacy w
poczatkowym punkcie drogi
r
2
– wektor wodzacy w koncowym
punkcie drogi, po której porusza sie
punkt.
F = -k(x-x
0
)
Prawo
Hooke’a,
F = -kx
α
α
cos
cos
Fs
W
s
F
s
F
W
=
⋅
⋅
=
•
=
r
r
v
r
W = F·s dla F
||
s;
α = 0
0
W = F·s = 0 dla F
⊥
s;
α = 90
0
∫
∫
=
=
=
=
x
x
x
kx
kx
kxdx
dx
x
F
W
0
0
2
0
2
2
1
2
1
)
(
'
2
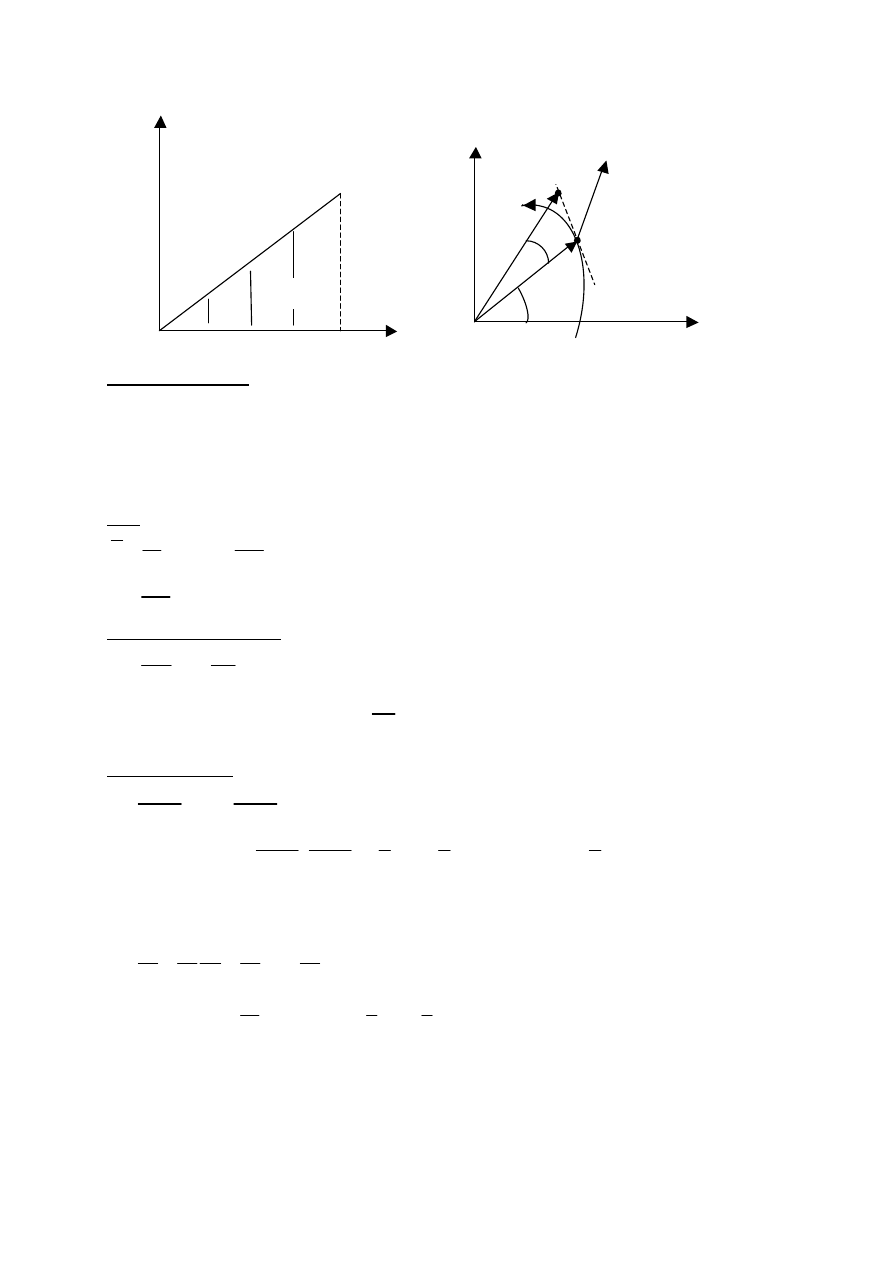
W ruchu obrotowym
ds = rd
θ
, Fcos
ϕ
– skladowa sily F w kierunku ds
ϕ
θ
θ
ϕ
ϕ
cos
cos
cos
Fr
M
bo
d
M
dW
d
Fr
ds
F
s
d
F
dW
=
=
=
=
=
r
r
M – wartosc chwilowego momentu sily dzialajacego na cialo sztywne wzgledem osi 0.
Moc
t
W
P
=
dt
dW
P
=
jednostka [J/s] = [W]
dt
dW
P
=
jesli W ~ t
wtedy P =W/t
Moc w ruchu obrotowym
dt
d
a
Md
dW
bo
M
P
M
dt
d
M
dt
dW
P
θ
ω
θ
ω
ω
θ
=
=
=
=
=
=
,
Energia kinetyczna
t
v
v
x
t
v
v
a
2
,
0
0
+
=
−
=
2
0
2
0
0
2
1
2
1
2
max
mv
mv
t
v
v
t
v
v
m
x
F
W
−
=
+
⋅
−
=
=
=
i
2
2
1
mv
E
k
=
dx
dv
v
v
dx
dv
dt
dx
dx
dv
dt
dv
a
=
=
=
=
k
k
k
E
E
E
W
∆
=
−
=
0
Twierdzenie o pracy i energii
0
,
=
∆
=
=
k
E
W
const
v
v, v
0
– predkosc punktu materialnego na koncu i poczatku drogi
F
x
kx
F’= kx
½ kx
2
x
f
d?
r(t+dt)
?
P
F
ds
P(t+dt)
r(t)
O
y
x
v
0
– predkosc czastki w chwili t=0
v – predkosc w chwili t
∫
∫
=
=
x
x
Fdx
s
d
F
W
0
r
r
2
0
2
2
1
2
1
0
0
0
mv
mv
dv
mv
dx
dx
dv
mv
Fdx
W
v
v
x
x
x
x
−
=
=
=
=
∫
∫
∫
3
W ruchu obrotowym
E
k
= ½I
ω
2
gdy M – moment sily = const,
ϕ
- obrót o pewinien kat
W = M
ϕ = ∆E
k
= Fs
E
k
= ½mv
2
+ ½I
ω
2
ωα
ω
ω
ω
ω
I
dt
d
I
dt
d
I
I
dt
d
dt
dW
=
=
=
=
2
2
2
1
)
2
1
(
α
ωα
ω
I
M
I
M
=
=
II zasada dynamiki dla ruchu obrotowego ciala sztywnego
Energia potencjalna
k
x
x
E
mv
mv
Fdx
W
∆
=
−
=
=
∫
2
0
2
2
1
2
1
0
∆
E
k
= -
∆
E
p
dx
x
F
x
E
x
E
zatem
dx
x
F
E
czyli
Fdx
E
x
x
p
p
x
x
p
x
x
k
)
(
)
(
)
(
)
(
0
0
0
0
∫
∫
∫
=
−
−
=
∆
=
∆
const
mv
x
E
mv
x
E
E
mv
mv
Fdx
x
E
x
E
p
p
k
x
x
p
p
=
+
=
+
∆
−
=
−
=
=
−
∫
2
0
0
2
2
2
0
0
2
1
)
(
2
1
)
(
lub
2
1
2
1
)
(
)
(
0
Prawo zachowania energii kinetycznej i potencjalnej.
2
2
1
)
(
mv
x
E
E
E
E
p
k
p
+
=
+
=
∫
∆
=
−
−
=
p
p
E
dx
x
f
bo
x
E
dx
d
x
F
)
(
)
(
)
(
Zasada zachowania energii mechanicznej
const
mv
mgh
=
+
2
2
1
h – wysokosc punktu materialnego od powierzchni Ziemi
P
R
v
0
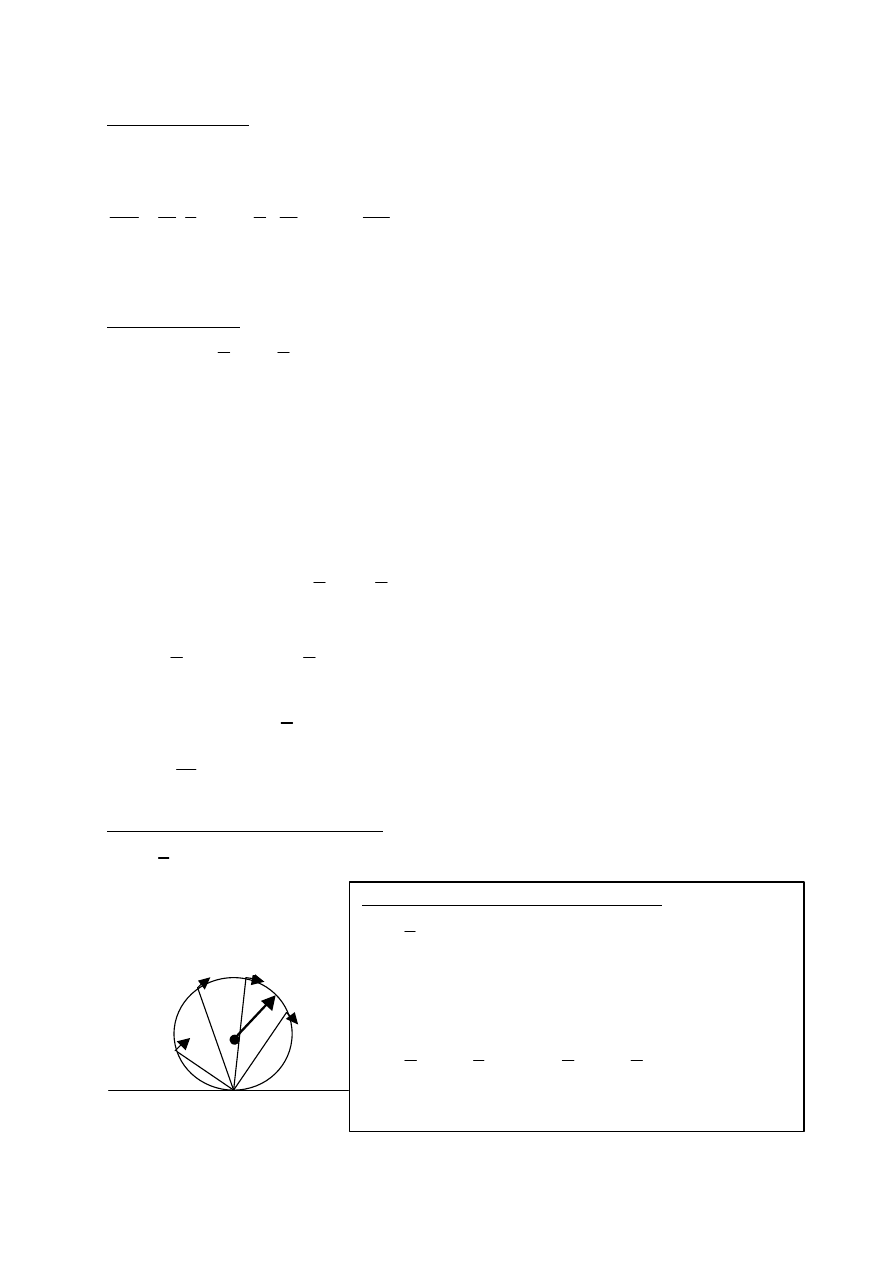
Ruch postepowo-obrotowy ciala sztywnego
2
2
1
ω
p
k
I
E
=
i
I
p
= I
0
+ MR
2
I
p
– moment bezwladnosci wzgl. osi przechodzacej przez
pkt. P,
I
0
– moment bezwladnosci wzgl. osi równoleglej do osi
przechodzacej przez srodek ciezkosci, czyli
0
2
0
2
0
2
2
2
0
,
2
1
2
1
2
1
2
1
v
R
bo
Mv
I
MR
I
E
k
=
+
=
+
=
ω
ω
ω
ω
v
0
= R? – jest predkoscia liniowa srodka masy cylindra
wzgledem nieruchomego pkt. P
Wyszukiwarka
Podobne podstrony:
06 praca energia w
IMIR przyklady praca energia id Nieznany
Klucz do testu I A PRACA I ENERGIA
15 praca i energia w polu elekt Nieznany (2)
2007 06 Praca z grafiką z linii komend [Grafika]
06 Praca układu pomp odśrodkowych
gimnazium test praca energia
4 - Praca I Energia - Teoria, VI
IMIR przykłady praca energia
07 praca i energia
15 Praca i energia w polu elekt Nieznany (3)
Praca i energia ppt
ped praca energia, MiBM, Nauczka, 2 semstr, sesja, Test z fizyki (jacenty86), FIZYKA ZERÓWKA, 4 ped
Układ pomp, 06. Praca układu pomp odśrodkowych - 4 (4.0)
06 produkcja energii elektrycznej
praca energia, AGH górnictwo i geologia, II SEM, Fizyka I, ćwiczenia
więcej podobnych podstron