
Automatyka i Robotyka
Przykładowe zadania
1. Dane jest równanie stanu układu sterowania
1
1
2
2
1
5
4
x
y
x
x
u
x
x
⋅
=
⋅
=
+
=
&
&
Określić odpowiedź układu sterowania na impuls Dirac’a.
Odp.:
)
(
5
,
2
)
(
2
2
t
t
e
e
t
y
+
−
+
⋅
=
Time (sec.)
A
m
pl
itud
e
Impulse Response
0
0.5
1
1.5
2
2.5
0
50
100
150
200
250
300
350
400
2. Dla układu sterowania o transmitancji:
1
2
3
)
(
+
⋅
⋅
=
s
s
s
G
a) podać równanie różniczkowe układu,
b) określić odpowiedź układu na skok jednostkowy,
c) naszkicować charakterystyki A-F Nyquist’a oraz logarytmiczne charakterystyki
Bodego układu,
d) określić pasmo przenoszenia.
Odp.:
a)
)
(
3
)
(
)
(
2
t
u
t
x
t
x
&
&
⋅
=
+
⋅
b)
t
e
t
x
5
,
0
5
,
1
)
(
−
⋅
=
Time (sec.)
A
m
pl
itude
Step Response
0
2
4
6
8
10
12
0
0.5
1
1.5
c)
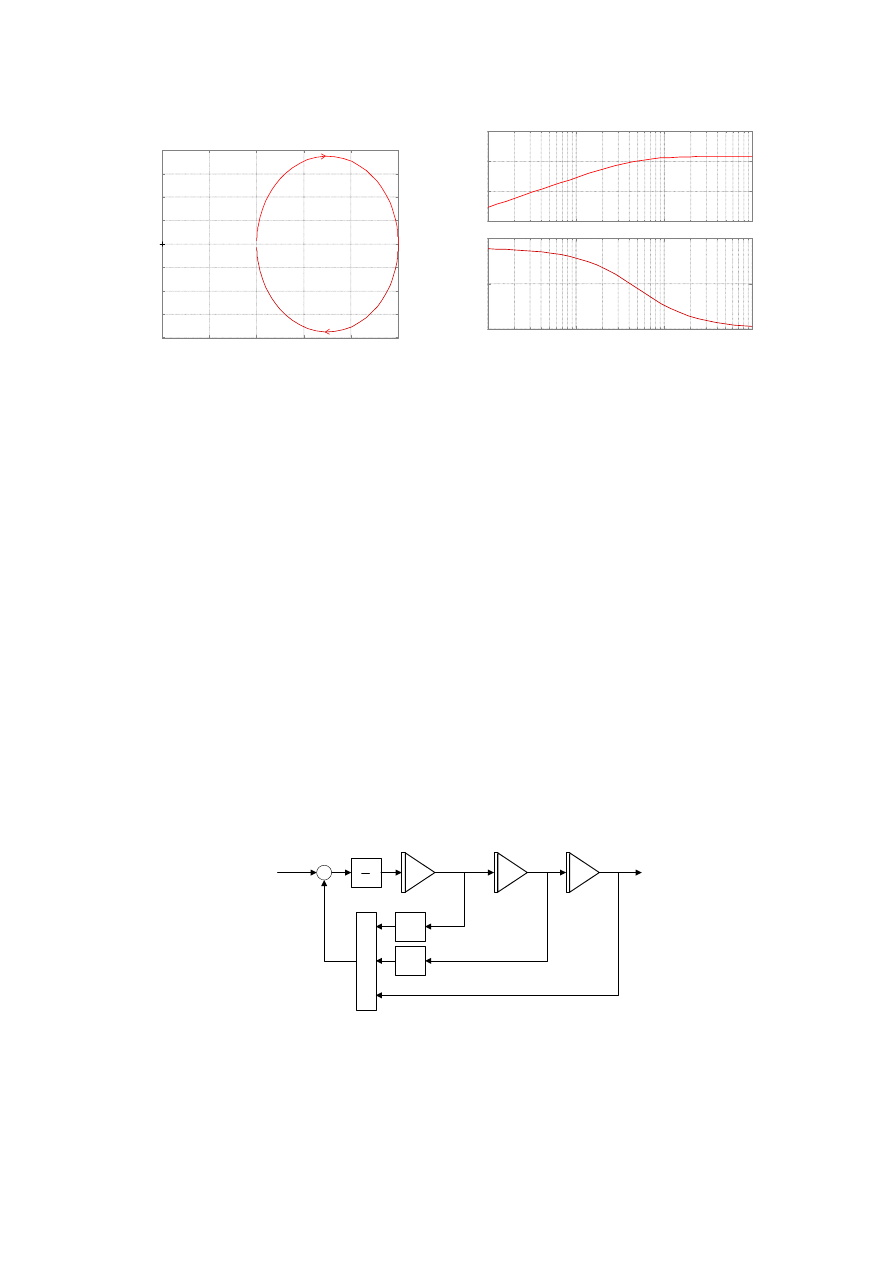
Real Axis
Im
agi
na
ry
A
xi
s
Nyquist Diagrams
-1
-0.5
0
0.5
1
1.5
-0.8
-0.6
-0.4
-0.2
0
0.2
0.4
0.6
0.8
Frequency (rad/sec)
P
has
e (
deg)
; M
agn
itude (
dB
)
Bode Diagrams
-40
-20
0
20
10
-2
10
-1
10
0
10
1
0
50
100
d)
rad/s.
3. Dane jest równanie różniczkowe układu sterowania:
)
(
)
(
)
(
2
)
(
3
)
(
4
t
u
t
x
t
x
t
x
t
x
=
+
⋅
+
⋅
+
⋅
&
&&
&&
&
a)
przedstawić model matematyczny układu sterowania w przestrzeni stanu,
b)
podać macierz dynamiki stanu, macierz sterowania oraz macierz tranzycyjną układu,
c)
przedstawić schemat blokowy układu sterowania odpowiadający jego modelowi w
przestrzeni stanu,
Odp.:
a)
(
)
1
3
2
1
3
3
2
2
1
3
2
25
,
0
x
y
u
x
x
x
x
x
x
x
x
=
+
⋅
−
⋅
−
−
⋅
=
=
=
&
&
&
b)
[
]
]
0
[
;
0
0
1
;
25
,
0
0
0
;
75
,
0
1
0
5
,
0
0
1
25
,
0
0
0
=
=
=
−
−
−
=
D
C
B
A
c)
∫
∫
∫
2
3
+
+
+
_
4
1
u
+
x
4. Wyznaczyć odpowiedź następującego układu sterowania na impuls Dirac’a.
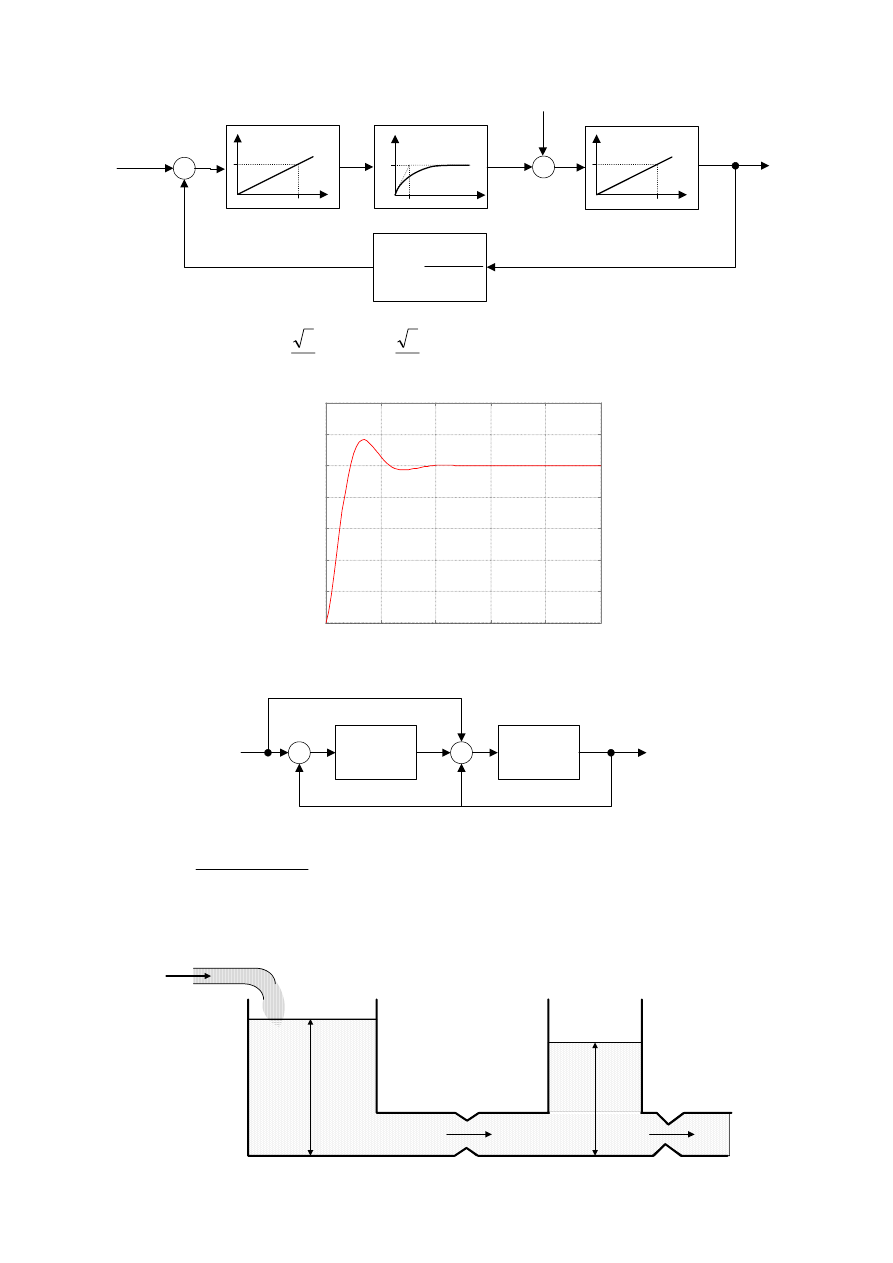
1
0,01
1
100
s
s
s
G
⋅
+
=
2
,
0
1
)
(
1
0,2
+
_
+
+
u
z
x
Odp.:
0
;
)
2
3
sin
3
,
0
2
3
(cos
1
)
(
5
,
0
≥
⋅
+
−
=
−
t
t
t
e
t
x
t
Time (sec.)
Amp
lit
ud
e
Impulse Response
0
5
10
15
20
25
0
0.2
0.4
0.6
0.8
1
1.2
1.4
5. Wyznaczyć transmitancję zastępczą układu przedstawionego schematem blokowym:
G
1
G
2
+
+
+
_
_
u
x
Odp.:
2
1
2
1
2
1
)
1
(
G
G
G
G
G
G
Z
⋅
+
+
+
⋅
=
6. Narysować równoważne układy mechaniczny i elektryczny dla hydraulicznego układu
przedstawionego na rysunku.
A
1
h
1
h
2
A
2
R
2
R
1
q
1
q
2
q
3
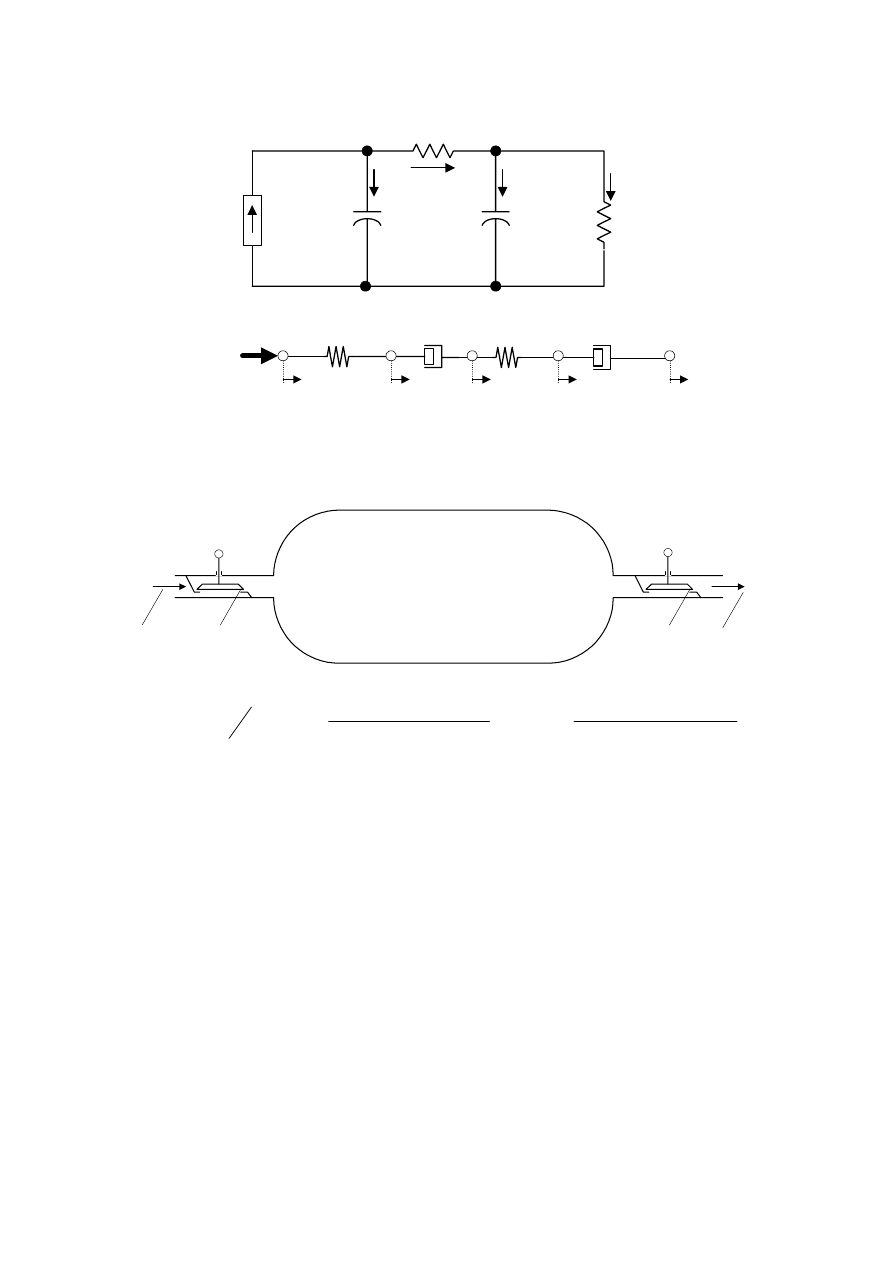
u
2
C
1
C
2
i
C
1
R
2
R
1
i
2
i
C
2
i
1
u
K
1
K
2
Z
1
Z
2
x
K1
x
1
x
K2
x
2
f
7. Wyprowadzić zlinearyzowany model matematyczny zbiornika gazu przedstawionego na
rysunku. Sygnałami wejściowymi są A
1
(t) i A
2
(t), wyjściowy to ciśnienie w zbiorniku p(t).
Przyjąć, że proces zmiany ciśnienia w zbiorniku odbędzie się w stałej temperaturze
(przemiana izotermiczna).
A
1
(t)
A
2
(t)
p (t)
q
1
(t)
q
2
(t)
p
2
=p
atm .
p
z
=const.
odp.:
)
(
)
(
)
(
)
(
2
2
1
1
t
A
C
t
A
C
t
p
t
p
T
∆
⋅
+
∆
⋅
=
∆
+
∆
⋅ &
gdzie:
RT
V
T
ρ
=
,
)
(
2
0
2
2
0
1
0
1
2
2
0
1
A
A
A
q
C
+
⋅
⋅
⋅
=
α
ρ
oraz
)
(
2
0
2
2
0
1
0
2
2
2
0
1
A
A
A
q
C
+
⋅
⋅
⋅
=
α
ρ
T: temperatura,
ρ
: gęstość, gęstość, R: stała gazowa, q: natężenie przepływu/odpływu,
indeks dolny 0: punkt nominalny (stan ustalony).
Wyszukiwarka
Podobne podstrony:
chemia zadania 2 id 113035 Nieznany
me zadanie 2 id 290295 Nieznany
plyta zadanie id 363191 Nieznany
Dodatkowe zadania id 138777 Nieznany
formularze zadania id 179681 Nieznany
(budzet zadaniowy)id 1238 Nieznany (2)
CO zadania id 118396 Nieznany
blok 7 zadania id 90420 Nieznany (2)
111 ZADANIA2 1 id 601077 Nieznany (2)
MAS e przyklad roz id 281198 Nieznany
chemia przykladowe zad id 11281 Nieznany
Algorytmy zadania id 51150 Nieznany (2)
elektrotechnika zadanie id 1593 Nieznany
IT zadania1 id 220832 Nieznany
granica ciagu zadania id 195350 Nieznany
jQuery zadania id 228844 Nieznany
AiR Przykładowe zadania
IMIC przyklady drgania id 21180 Nieznany
więcej podobnych podstron