51
Ponieważ cztery wielkości występujące w powyższych formułach, tzn. pęd p, siła F,
kręt K
C
i moment M
C
względem środka masy lub punktu nieruchomego, są wektorami,
więc metodę bilansową można również nazwać metodą wektorową. Nazywamy ją
także, przez wzgląd na autorów formuł (2.47) i (2.48), metodą Newtona - Eulera.
Warto
zauważyć, że z równania (2.47), po wykorzystaniu definicji pędu p = mv
i przy założeniu, że m = const, można otrzymać II zasadę Newtona, czyli równanie
m a = F
(2.51)
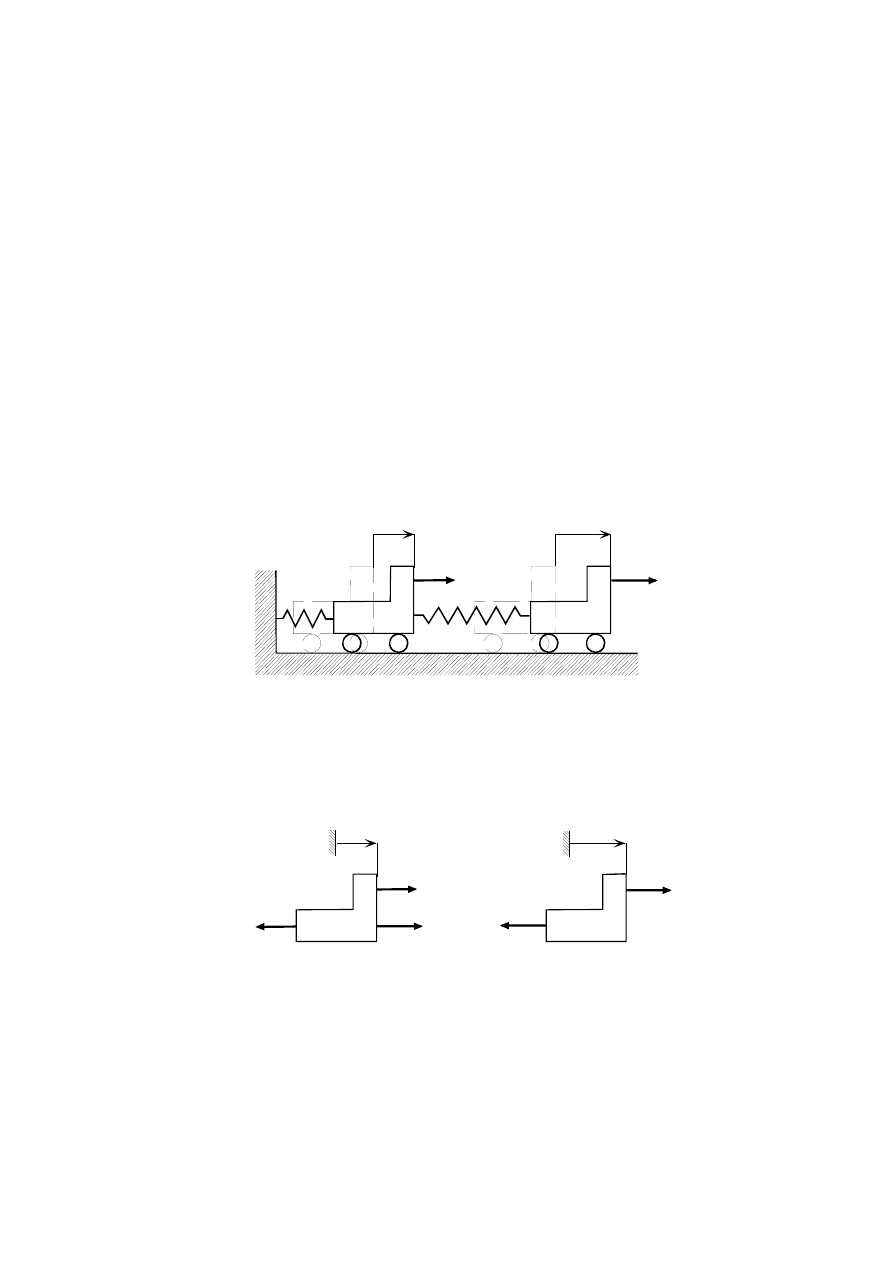
Przykład 2.1. W celu ilustracji metody bilansowej wyprowadzimy równania ruchu dla
układu, którego schemat przedstawiony jest na rys.2.19. Na rysunku tym symbole q
1
i
q
2
oznaczają współrzędne punktów materialnych mierzone od położenia równowagi.
Przyjmujemy ponadto, że koła wagoników jak i sprężyny są pozbawione masy.
q
1
q
2
F
1
(t)
F
2
(t)
k
1
k
2
m
1
m
2
Rys.2.19
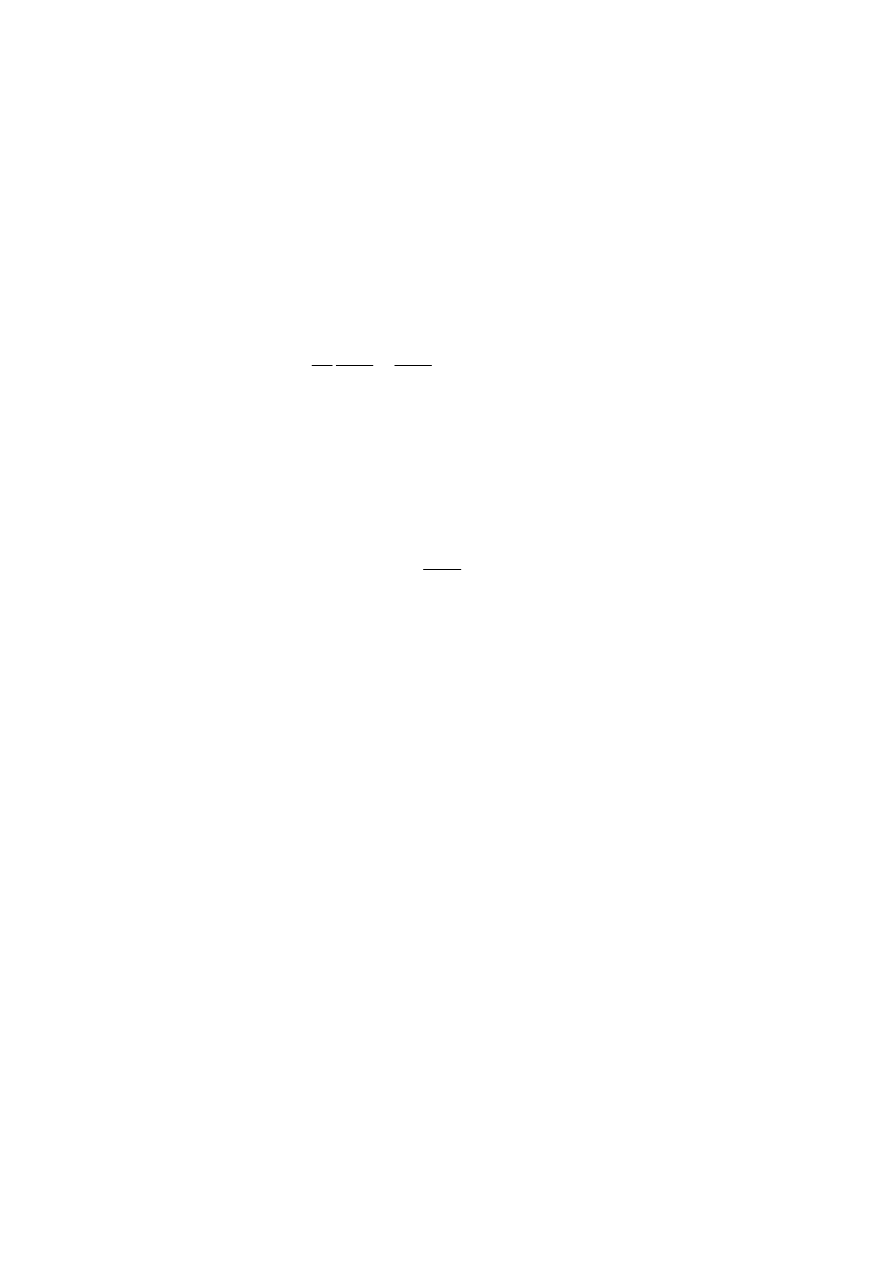
Wyprowadzając równania ruchu metodą bilansową w pierwszej kolejności uwalniamy
obie masy od więzów, czyli m.in. od sprężyn, zastępując ich działanie siłami, co
przedstawia rys.2.20
q
2
F
2
(t)
m
2
k
2
(q
2
-q
1
)
q
1
F
1
(t)
k
1
q
1
k
2
(q
2
-q
1
)
m
1
Rys. 2.20
Następnie zapisujemy równanie (2.51) kolejno dla każdej masy:
(
)
( )
t
F
q
q
k
q
k
q
m
1
1
2
2
1
1
1
1
+
−
+
−
=
&&
(P.2.1a)
(
)
( )
t
F
q
q
k
q
m
2
1
2
2
2
2
+
−
−
=
&&
(P.2.1b)
52
Po uporządkowaniu równań (P.2.1) można je zapisać w następującej postaci
standardowej
(
)
( )
t
F
q
k
q
k
k
q
m
1
2
2
1
2
1
1
1
=
−
+
+
&&
(P.2.2a)
( )
t
F
q
k
q
k
q
m
2
2
2
1
1
2
2
=
+
−
&&
(P.2.2b)
2.5.3 Równania Lagrange’a II rodzaju
Równania te w najbardziej ogólnym zapisie mają postać
σ
σ
σ
=
∂
∂
−
∂
∂
Q
q
L
q
L
dt
d
&
σ = 1,...,s
(2.52)
gdzie wielkość L, zwana funkcją Lagrange’a albo lagranżianem, jest zdefiniowana jako
L = T - V
(2.53)
czyli jest różnicą energii kinetycznej T i potencjalnej V. Wielkość Q
σ
jest siłą
uogólnioną niepotencjalną, którą wyznacza się ze wzoru
σ
ν
=
ν
ν
σ
∂
∂
⋅
=
∑
q
Q
n
r
F
1
σ = 1,...,s
(2.54)
Wielkości q
σ
w liczbie stopni swobody s są współrzędnymi uogólnionymi, F
ν
są
wektorami głównymi sił przyłożonymi w punktach określonych wektorami
pozycyjnymi r
ν
,
ν = 1,...,n.
Aby
skorzystać ze wzoru (2.54) należy wektory r
ν
wyrazić za pomocą
współrzędnych uogólnionych, tj. skorzystać ze związków
(
)
σ
ν
ν
=
q
;
t
r
r
ν = 1,..., n ; σ = 1,...,s
(2.55)
Tradycyjny zapis równań Lagrange’a pochłania zbyt dużo miejsca. Przedstawiamy więc
alternatywny, zwarty zapis równań (2.52)
σ
•
=
−
σ
σ
Q
,
L
)
,
L
(
q
q&
σ = 1,...,s
(2.56)
z którego w dalszym ciągu będziemy wielokrotnie korzystać.
W (2.56) symbole
σ
q
,
L
&
i
σ
q
,
L oznaczają pochodne cząstkowe funkcji L względem
odpowiednio prędkości uogólnionej
σ
q& oraz współrzędnej uogólnionej q
σ
. Operator
•
(*) oznacza pochodną zupełną względem czasu wielkości w nawiasie. Analogiczną
symbolikę stosować będziemy także w odniesieniu do innych funkcji.

53
Jeżeli na układ drgający działają tylko siły potencjalne, to równania (2.52) wygodnie
jest wziąć w postaci, która uwzględnia fakt, że energia potencjalna nie jest funkcją
prędkości uogólnionych
0
,
V
,
T
)
,
T
(
q
q
q
=
+
−
σ
σ
σ
•
&
σ = 1,...,s
(2.57)
Przy stosowaniu metody Lagrange’a należy przestrzegać następującej kolejności
działań:
1. Ustalić liczbę stopni swobody układu drgającego;
2. Wybrać współrzędne uogólnione;
3. Wyrazić energię kinetyczną i potencjalną w funkcji współrzędnych i prędkości
uogólnionych;
4. Wykonać operacje różniczkowania występujące w równaniu (2.52);
5. Obliczyć niepotencjalne siły uogólnione ze wzoru (2.54);
6. Ułożyć równania ruchu w liczbie równej liczbie stopni swobody.
Przykład 2.2. W celu ilustracji metody Lagrange’a, a także jej porównania z metodą
bilansową, rozważmy ponownie model przedstawiony na rys.2.19. Ustalamy, że układ
ten ma dwa stopnie swobody. Jako współrzędne uogólnione przyjmujemy
przemieszczenia q
1
i
q
2
odmierzane od położenia równowagi. Energia kinetyczna i
potencjalna wyrażają się odpowiednio wzorami:
2
2
2
2
1
1
q
m
5
,
0
q
m
5
,
0
T
&
& +
=
;
(
)
2
1
2
2
2
1
1
q
q
k
5
,
0
q
k
5
,
0
V
−
+
=
(P.2.3a,b)
Równania (2.52), po uwzględnieniu wzoru (2.53), przybiorą dla rozważanego układu
postać:
σ
•
=
+
−
σ
σ
σ
Q
,
V
,
T
)
,
T
(
q
q
q&
σ = 1,2 (P.2.4)
W czwartym etapie wykonujemy wymagane różniczkowania. Mamy:
1
1
1
q
m
q
/
T
&
& =
∂
∂
,
1
1
1
q
m
)
q
/
T
(
&&
&
=
∂
∂
•
,
0
q
/
T
1
=
∂
∂
,
)
q
q
(
k
q
k
q
/
V
1
2
2
1
1
1
−
−
=
∂
∂
(P.2.5)
2
2
2
q
m
q
/
T
&
& =
∂
∂
,
2
2
2
q
m
)
q
/
T
(
&&
&
=
∂
∂
•
,
0
q
/
T
2
=
∂
∂
,
)
q
q
(
k
q
/
V
1
2
2
2
−
=
∂
∂
(P.2.6)
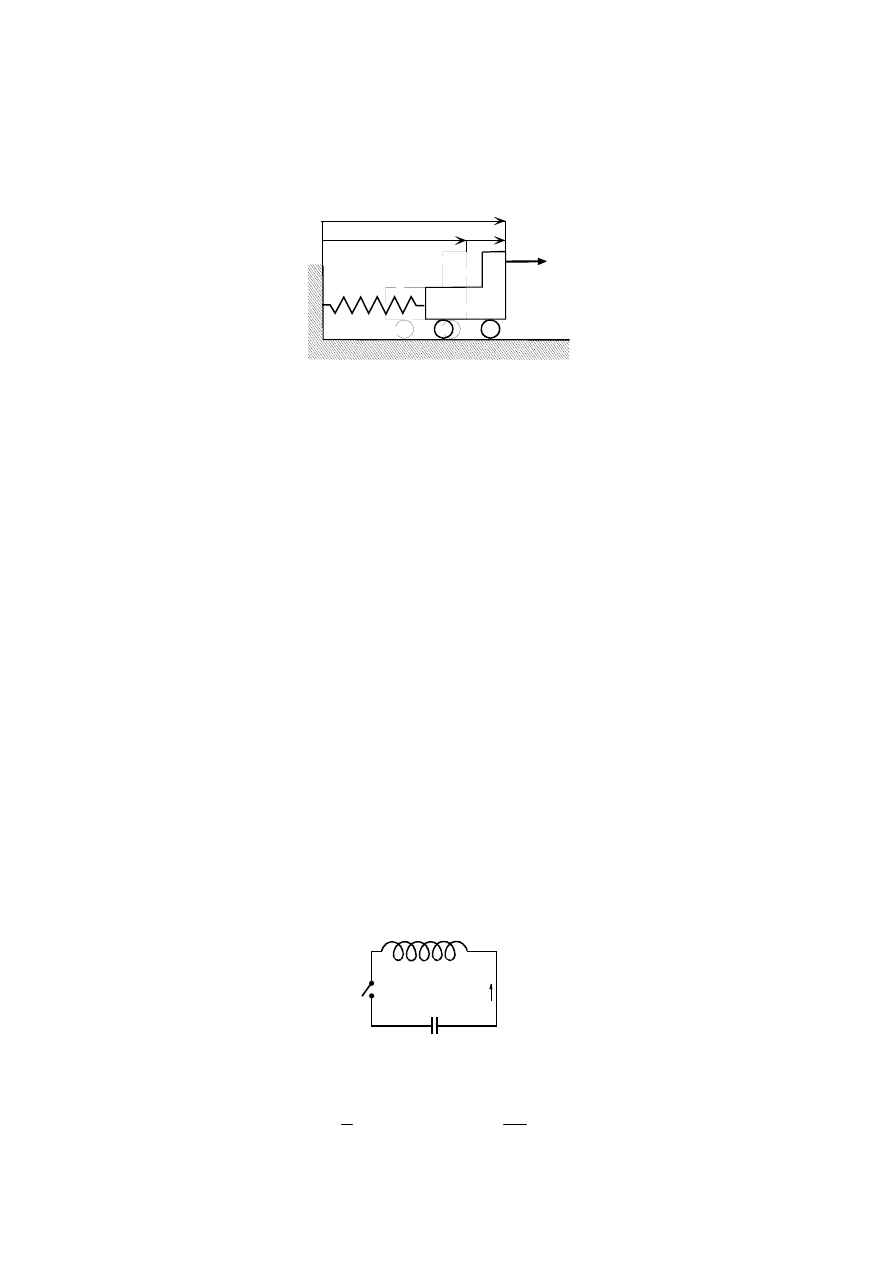
Do wyznaczenia niepotencjalnych sił uogólnionych ze wzoru (2.54) potrzebne są
pochodne cząstkowe
σ
ν
∂
∂
q
/
r
. W celu ich wyznaczenia, zauważmy, że
ν
ν
ν
q
C
r
+
=
,
54
gdzie C
ν
jest pewną stałą zależną od długości swobodnych sprężyn i długości wózka
(rys.2.21).
q
1
F
1
(t)
m
1
r
1
C
1
Rys.2.21
Mamy zatem
,
1
/
1
1
=
∂
∂
q
r
,
0
/
2
1
=
∂
∂
q
r
,
0
/
1
2
=
∂
∂
q
r
,
1
/
2
2
=
∂
∂
q
r
a stąd, po
wykorzystaniu wzoru (2.54), otrzymujemy
( )
t
F
Q
1
1
=
,
( )
t
F
Q
2
2
=
.
(P.2.7)
Po podstawieniu do (P.2.4) pochodnych (P.2.5) i (P.2.6) oraz sił (P.2.7) otrzymujemy
dokładnie te same równania ruchu, co w wyniku zastosowania metody bilansu pędu,
czyli (P.2.2a,b).
Na pierwszy rzut oka wydaje się, że metoda Lagrange’a nie wykazuje żadnej
przewagi nad metodą bilansową. Otóż zalety metody Lagrange’a demonstrują się w
dwóch sytuacjach:
1) gdy modelujemy układy bardziej złożone (niż w powyższych przykładach),
np. o większej liczbie stopni swobody lub, gdy nałożone na układ więzy
dopuszczają złożone ruchy ciał tworzących układ .
2) kiedy rozważamy układy o innej naturze niż mechaniczna.
Dla ilustracji możliwości metody Lagrange’a w drugiej sytuacji rozważmy układ
elektryczny złożony z cewki o indukcyjności L i kondensatora o pojemności C (rys.
2.22).
L
C
e&
Rys.2.22
Dla przedstawionego układu mamy
2
2
1
e
L
T
&
=
,
2
2
1
e
C
V
=
(2.58a,b)
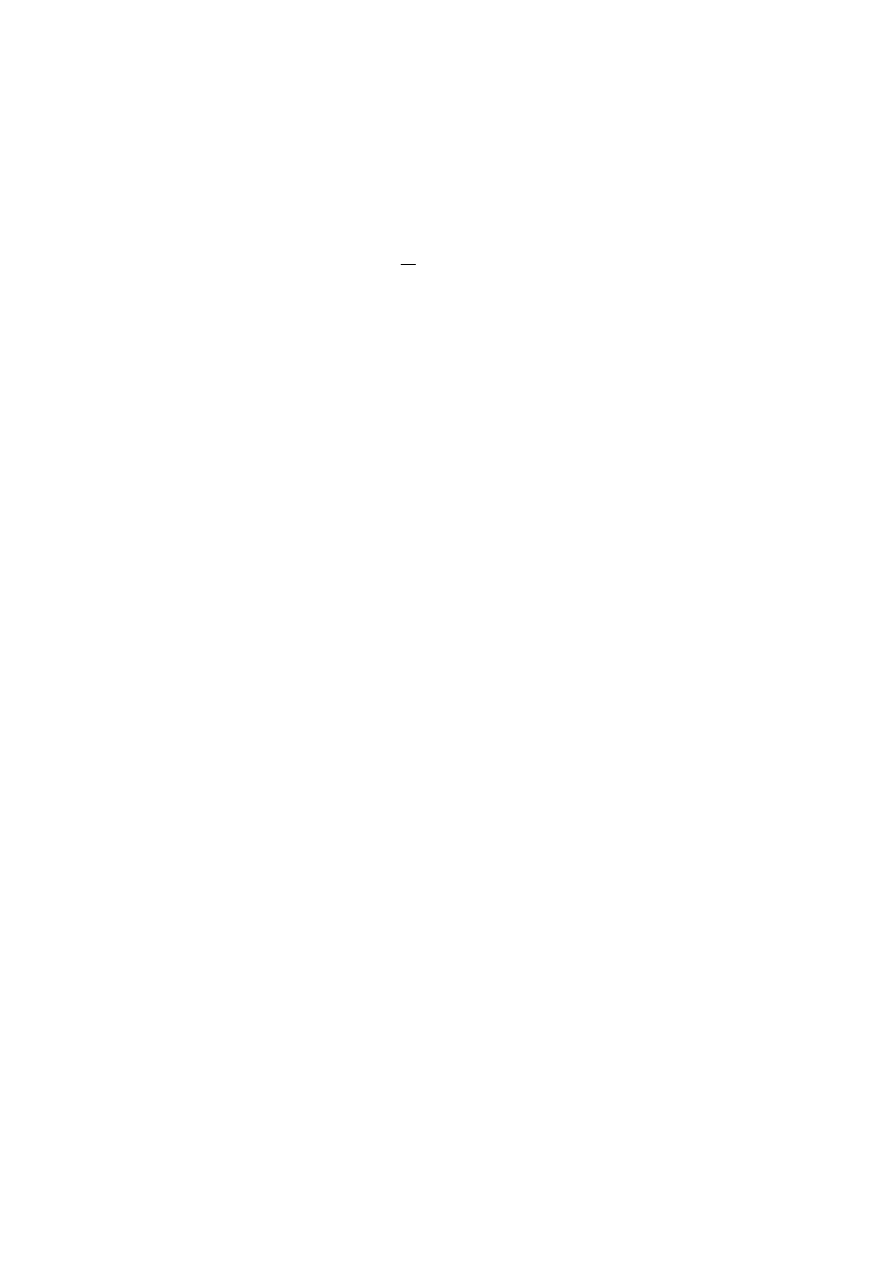
55
gdzie
e jest ładunkiem przepływającym przez obwód (zatem &e jest natężeniem prądu).
Równanie Lagrange’a ma postać
0
,
V
)
,
T
(
e
e
=
+
•
&
(2.59)
skąd, po podstawieniu wzorów (2.58a,b), mamy równanie
0
1 =
+
e
C
e
L &&
(2.60)
Równanie (2.60) można wprawdzie otrzymać z II prawa Kirchhoffa, ale tutaj istotny
jest fakt, że otrzymujemy je bez znajomości tego prawa, co podkreśla uniwersalny
charakter metody Lagrange’a. Innymi słowy metoda Lagrange’a daje możliwość
uogólnień.
2.6 ZABIEGI UPRASZCZAJĄCE
2.6.1 Dyskretyzacja
Bardzo wiele drgających układów fizycznych, z którymi mają do czynienia
inżynierowie, nie daje się opisać za pomocą równań różniczkowych zwyczajnych, jak
to było do tej pory. Jak zobaczymy w dalszej części niniejszego preskryptu naturalnym
modelem układów ciągłych są równania różniczkowe cząstkowe. Skoro jednak
znacznie prościej rozwiązuje się równania zwyczajne, to istnieje naturalna skłonność do
tworzenia modeli dyskretnych dla układów ciągłych. Zabieg taki nazywamy
dyskretyzacją. Ze względu na wynik dyskretyzacji zabieg ten bywa także nazywany
skupianiem. Znane są różne sposoby dyskretyzacji: Można spotkać się z poglądem, że
do najbardziej rozpowszechnionych należy metoda różnic skończonych i metoda
elementów skończonych (MES). Mówi się wówczas o komputerowych metodach
dyskretyzacji, gdyż są to metody nastawione na „produkowanie” modeli, które można
rozwiązywać tylko za pomocą komputera.
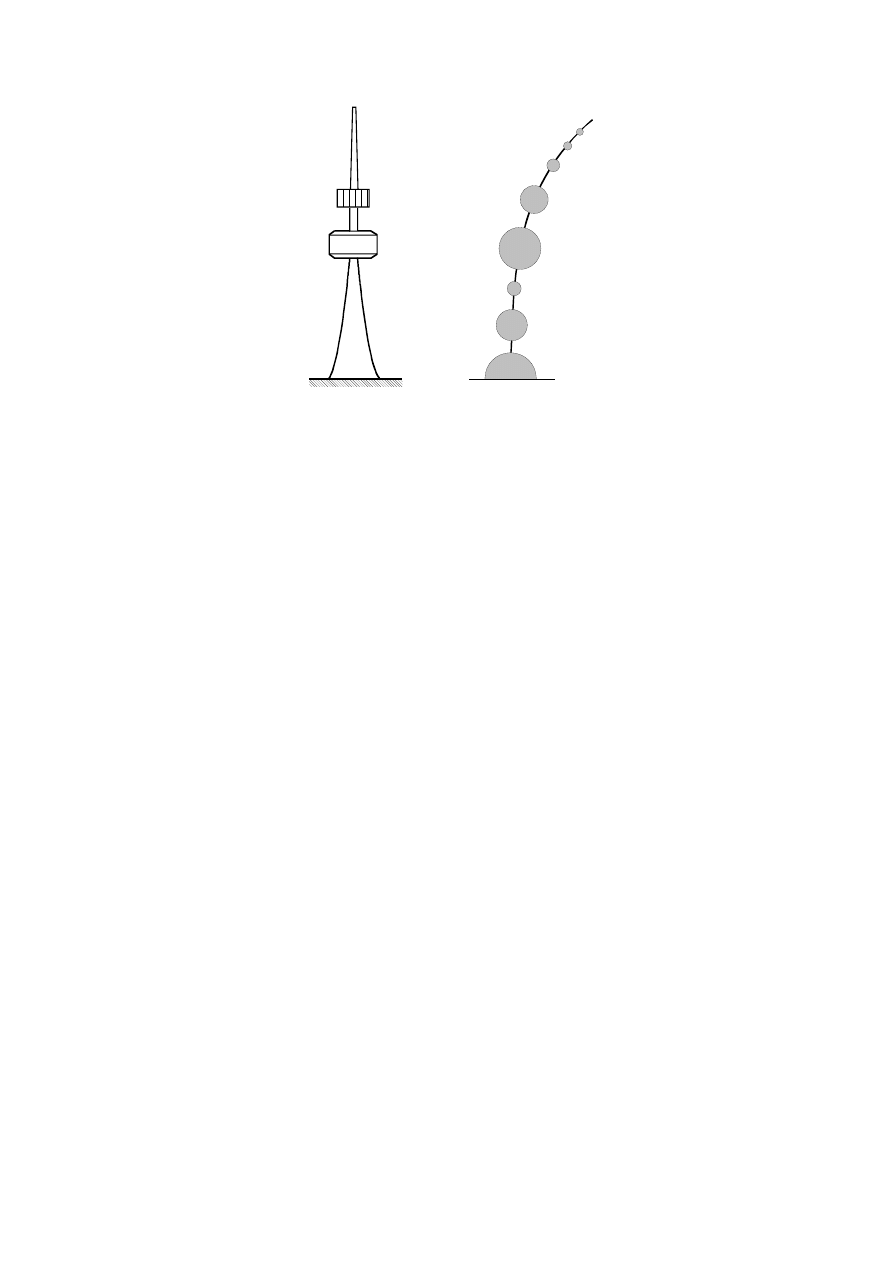
Warto w tym kontekście napomknąć, że na długo przed zastosowaniem w/w metod,
a w szczególności MESu, inżynierowie z powodzeniem stosowali dyskretyzację, którą z
braku lepszej nazwy nazywiemy dyskretyzacją inżynierską. Polega ona na tym, że
obiekt rzeczywisty dzieli się na kawałki, przypisując im odpowiednią masę na
podstawie pomiarów lub obliczeń (rys.2.25a). Masy te lokuje się na elemencie
modelowym, który cechuje się pewną sztywnością (np. na zginanie), ale pozbawiony
jest masy (rys. 2.25 b).
56
a)
b)
Rys. 2.25
Ponieważ w dalszych rozdziałach MES-em nie będziemy się zajmowali, więc
już tutaj podamy istotę tej metody dyskretyzacji, ale bez szczegółów, gdyż jest ona
wykładana jako oddzielny przedmiot. Istnieje też obszerna, wyspecjalizowana literatura
dotycząca MESu.
Metoda elementów skończonych (ang. finite element method) jest obecnie najczęściej
stosowaną metodą dyskretyzacji i znalazła powszechne zastosowanie w praktyce
inżynierskiej. Polega ona na podziale układu ciągłego na podukłady o prostych
kształtach, zwanych elementami skończonymi. Współrzędne uogólnione tych elementów
określa się w skończonej liczbie punktów leżących na ogół (choć niekoniecznie) na
brzegach elementów. Punkty te nazywa się węzłami. Przemieszczenia wewnątrz
elementów uzależniamy od przemieszczeń węzłów aproksymując je za pomocą tzw.
funkcji kształtu, które są przyjętymi z góry (a priori) wielomianami. Wzajemne
oddziaływanie między elementami odbywa się tylko poprzez węzły leżące na brzegach
sąsiadujących ze sobą elementów. Oddziaływanie to musi spełniać pewne związki
podstawowe (np. warunki równowagi) i równania ciągłości przemieszczeń węzłów.
W wyniku dyskretyzacji otrzymuje się układ równań różniczkowych zwyczajnych (dla
dynamiki) lub algebraicznych (dla statyki). Wielkościami poszukiwanymi są wielkości
węzłowe.
Z punktu widzenia dynamiki maszyn podstawową zaletą MESu jest możliwość
odtwarzania szczegółów konstrukcji, np. karbów czy niejednorodności.
57
Na zakończenie warto stwierdzić, że dyskretyzacja dotyczy na ogół przestrzeni,
przy jednoczesnym traktowaniu czasu jako wielkości ciągłej. Wyjątek stanowi tzw.
metoda elementów czasoprzestrzennych, w której dyskretyzacji podlega również czas.
Należy też wspomnieć, że MES jest stosowany nie tylko dla układów
mechanicznych, ale także elektrycznych , cieplnych, przepływowych, itp.
Istnieje jeszcze jeden sposób dyskretyzacji, popularny zwłaszcza w dynamice
konstrukcji lotniczych, który dla całości obrazu wstępnie omówimy. Otóż elementy
konstukcyjne samolotów (skrzydła, usterzenia, kadłuby) często modelujemy za pomocą
belek. Dyskretyzacja takich elementów wymaga założenia krzywej ugięcia belki
podczas drgań. Taką dyskretyzację nazwiemy matematyczną (ścislej: dyskretyzacją za
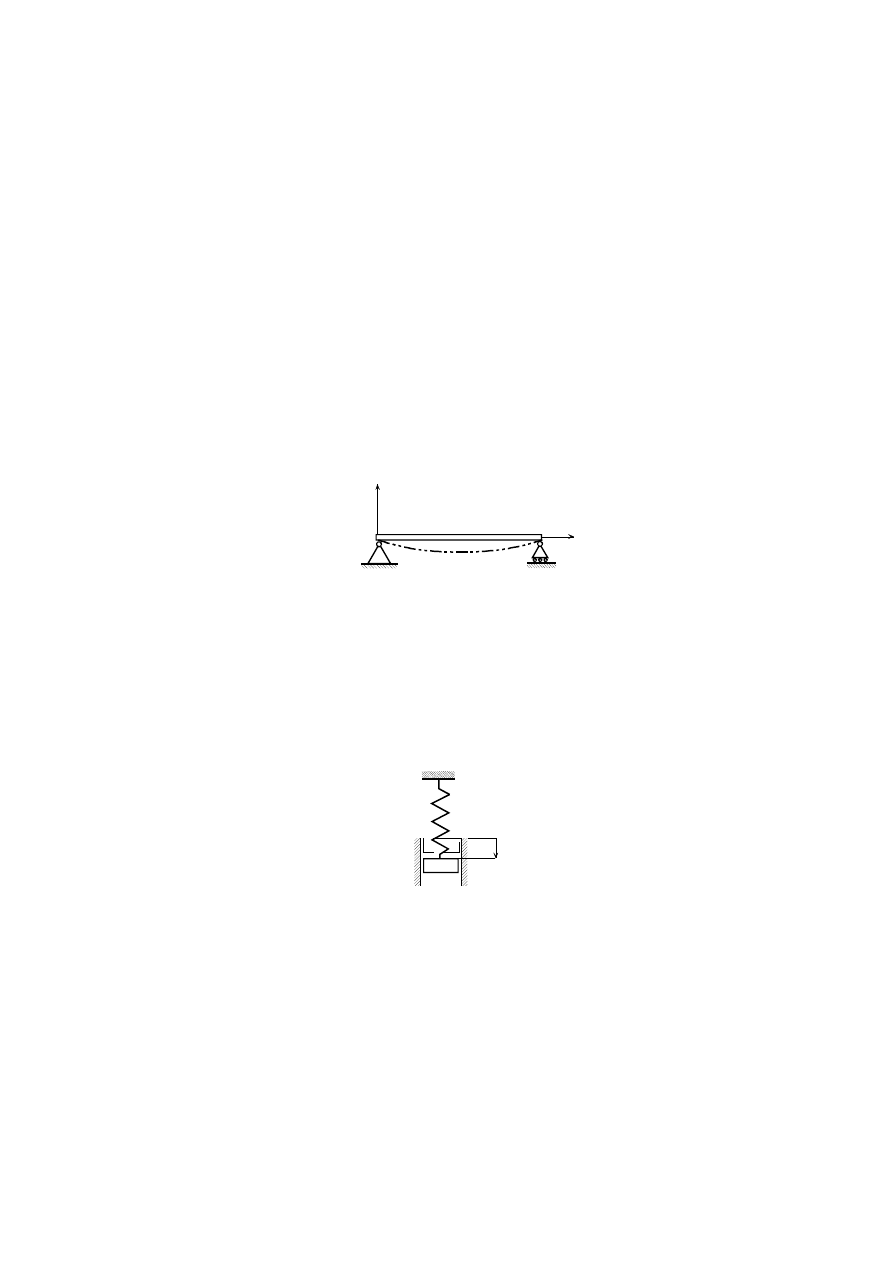
pomocą postaci drgań). Dla ustalenia uwagi zajmiemy się drganiami belki swobodnie
podpartej na obu końcach (rys. 2.26).
y
x
Rys.2.26
Załóżmy, że aktualne ugięcie belki y(x,t) można opisać iloczynem
y(x
,t)
=
f(x)q(t)
(2.66)
gdzie f(x) jest funkcją o postaci dostosowanej do rzeczywistej sytuacji (w rozważanym
wypadku może to być np. parabola, albo połówka sinusoidy), zaś q(t) jest nieznaną
funkcją czasu. Tym sposobem wyrażenie (2.66) opisuje przejście do modelu o jednym
stopniu swobody, przy czym q(t) jest współrzędną uogólnioną (rys. 2.27).
k
q(t)
m
Rys.2.27
Oczywiście powstaje pytanie jak się ma masa m punktu materialnego i sztywność k
sprężyny do masy m(x) rozłożonej wzdłuż długości belki oraz jej sztywność na zginanie
EI(x).
Linearyzacja
Niniejszy preskrypt jest poświęcona zagadnieniom podstawowym, przez co
rozumiemy, że będziemy przede wszystkim zajmować się modelami liniowymi. Jest
jednak faktem, że układy rzeczywiste mają elementy o charakterystykach nieliniowych
i zachodzi pytanie, co wówczas robić? Otóż jest także prawdą, że często dobre
58
przedstawienie własności dynamicznych, wystarczających do podjęcia decyzji
projektowych, można otrzymać zastępując rzeczywiste (nieliniowe) elementy
konstrukcyjne ich modelem liniowym o stałych parametrach. Taki sposób upraszczania
nosi nazwę
linearyzacji.
Choć istnieje wiele metod linearyzacji, to w niniejszym skrypcie omówimy tylko
jedną, ale za to bardzo ważną, a mianowicie linearyzację wokół wybranego punktu (tę
metodę często nazywa się linearyzacją w punkcie pracy).
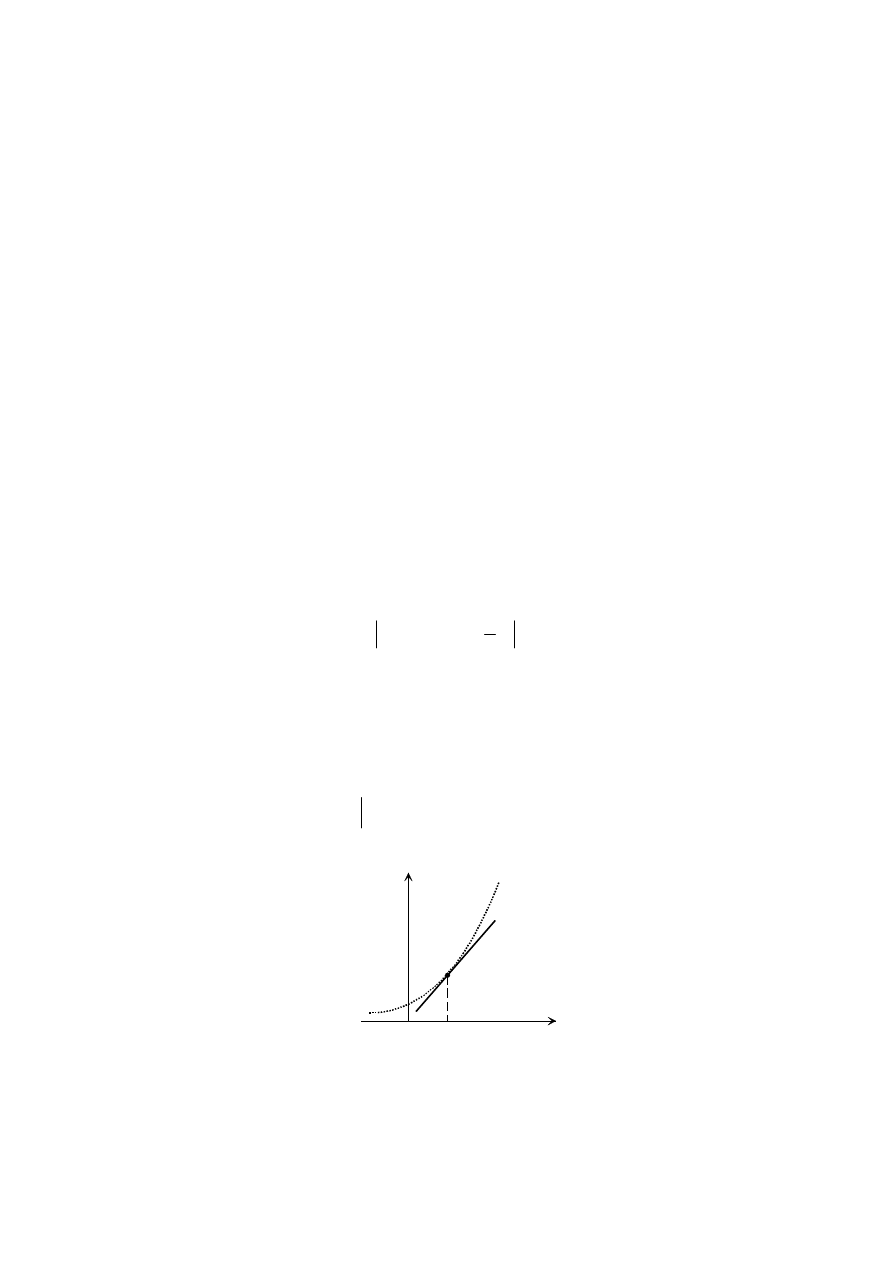
Jeżeli charakterystyka elementu opisana jest za pomocą pewnej funkcji nieliniowej
y = f(x), to w pewnym punkcie tej charakterystyki, np. przy x = x
0
, można poprowadzić
styczną do charakterystyki i uznać, że w pobliżu tego punktu charakterystyka pokrywa
się ze styczną, a więc ma postać
y = c
1
x + c
0
(2.67)
przy czym współczynnik c
1
odpowiada nachyleniu stycznej, zaś
c
0
jest przesunięciem
względem początku układu współrzędnych. Wzór (2.67) można też uzyskać
analitycznie po rozwinięciu funkcji f(x) w szereg Taylora
( ) ( )
(
)
(
)
....
x
x
f
x
x
f
x
f
x
f
x
x
x
x
+
−
′′
+
−
′
+
=
=
=
2
0
0
0
0
0
2
1
(2.68)
Jeżeli w szeregu (2.68) pominie się wszystkie wyrazy oprócz dwóch pierwszych, to
otrzymuje się przybliżenie liniowe funkcji f(x) jak poniżej
c
f
x x
1
0
= ′
=
,
( )
c
f x
c x
0
0
1 0
=
−
(2.69)
co, można zilustrować graficznie (rys. 2.28)
y
x
x
0
y = f(x)
y = c
1
x + c
0
Rys. 2.28
59
Na to, aby można było zaakceptować wzory (2.68), powinny być spełnione pewne
warunki: odchylenie (
x-x
0
) punktu aktualnego od punktu ustalonego
x
0
, wokół którego
dokonujemy linearyzacji, musi być dostatecznie małe. Innymi słowy oznacza to, że
wyrazy wyższego rzędu w szeregu (2.67) są pomijalnie małe wobec wyrazów
liniowych. Ponadto, aby przybliżenie liniowe miało sens, powinna istnieć pochodna
′
f
w punkcie
x
0.
Warunek ten oznacza „gładkość” charakterystyki
f(x) w punkcie x
0
, tzn.
brak załamań lub skoków w tym punkcie.
Rozważmy teraz przypadek bardzo częsty w praktyce, tzn. taki, kiedy ruch
odbywa się wokół punktu „zero”. Linearyzacja polega tutaj na zastosowaniu wzoru
(
)
(
)
....
1
!
2
1
1
1
2
+
−
+
+
=
+
ξ
ξ
ξ
m
m
m
m
(2.70)
i zachowaniu tylko wyrazu liniowego.
Dla ilustracji rozważmy:
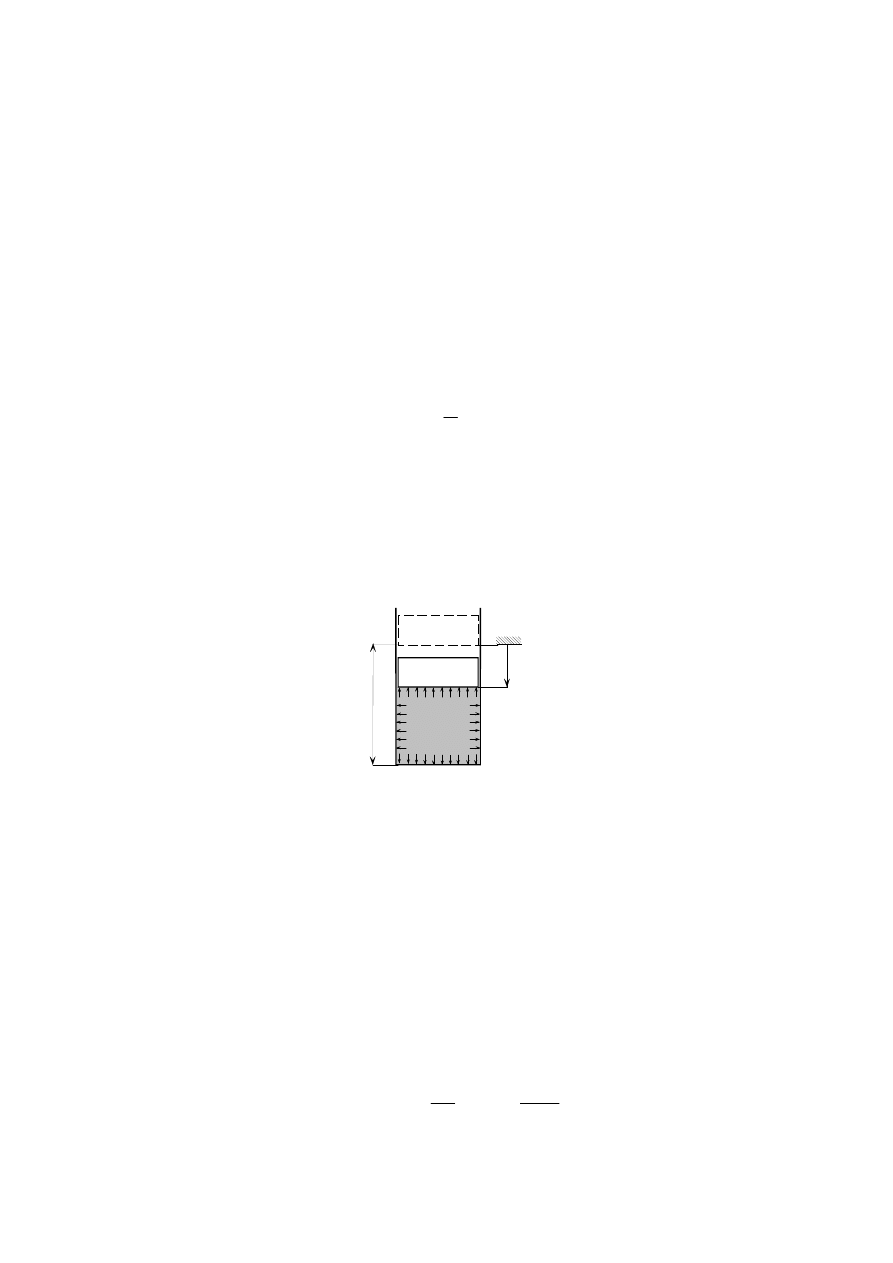
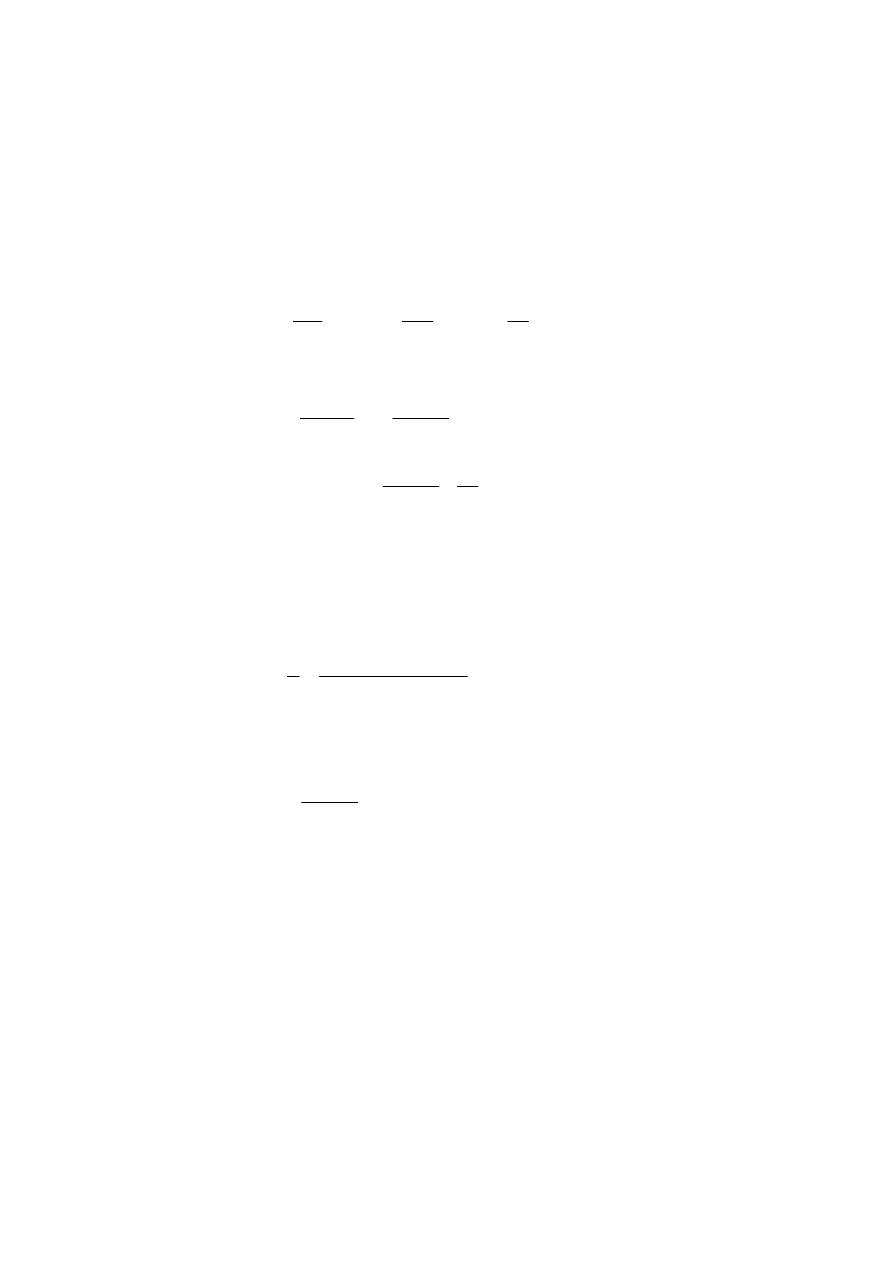
Przykład 2.4. Tłok o masie m zamyka szczelnie w zbiorniku o kształcie walca pewną
objętość V gazu izentropowego (zob.rys.2.29). Należy napisać równanie małych drgań
tłoka przy założeniu, że proces sprężania ma charakter adiabatyczny.
h
p
x
γ
m
x
Rys.2.29
Siła działająca na tłok „od spodu” jest p
x
A, gdzie A – pole powierzchni tłoka, p
x
– nieznane ciśnienie gazu po przesunięciu tłoka o x. Według II zasady Newtona mamy
mx
mg p A
x
&& =
−
(P.2.12)
Dla adiabatycznego sprężania gazu mamy równanie
p
x
V
γ
= c (P.2.13)
gdzie V jest objętością gazu w zbiorniku , a
γ
oznacza wykładnik adiabaty (dla
powietrza
γ
= 1,4). Zapiszmy równanie (P.2.13) dla dwóch stanów (równowagi i ruchu):
γ
γ
=
x
x
V
p
V
p
0
0
. Stąd, po uwzględnieniu faktu, że
V =Ah, zaś V
x
= A(h - x) otrzymujemy
γ
γ
⎟
⎠
⎞
⎜
⎝
⎛
−
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
x
h
h
p
V
V
p
p
x
x
0
0
0
(P.2.14)
60
Po podstawieniu wzoru (P.2.14) do równania (P.2.12) otrzymujemy
mx p
h
h x
A
mg
&& +
−
⎛
⎝⎜
⎞
⎠⎟
=
0
γ
(P.2.15)
czyli równanie ruchu tłoka ma jest nieliniowe. Źródłem nieliniowości jest oczywiście
równanie stanu (P.2.13). Linearyzacja polega tutaj na zastosowaniu wzoru (2.70), co
daje nam zależność
p
p
h
x
x
=
+
⎛
⎝⎜
⎞
⎠⎟
0
1
γ
(P.2.16)
a w konsekwencji, po uwzględnieniu, że mg = p
0
A, równanie (P.2.15) przybiera postać
mx
p A
h
x
&& +
=
0
0
γ
(P.2.17)
Równanie (P.2.17) jest już równaniem liniowym. Ponieważ powstało w wyniku
linearyzacji wyrazu nieliniowego mówimy też często, że jest to równanie
zlinearyzowane.
2.6.3 Agregacja
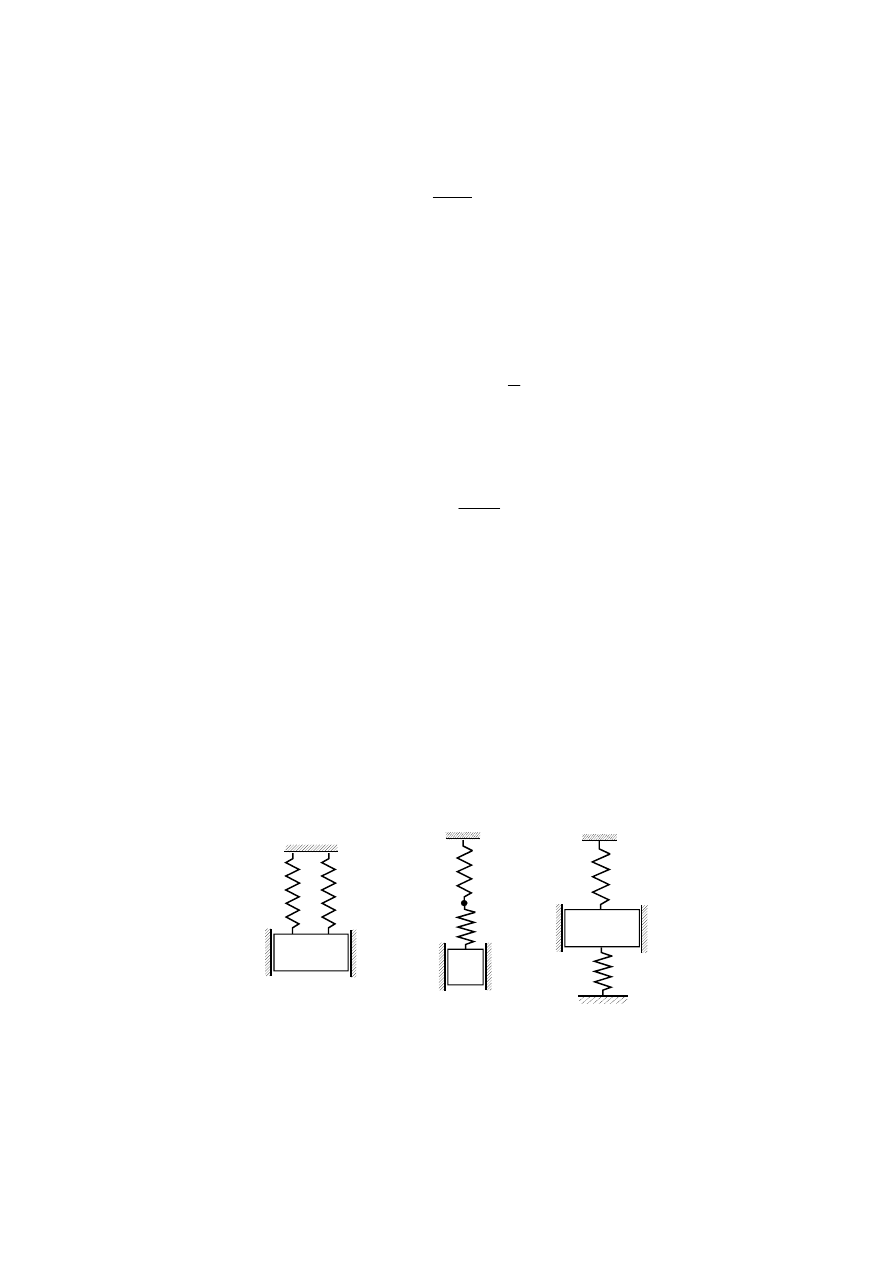
W konstrukcjach rzeczywistych elementy mechaniczne występują w różnych
kombinacjach, przez co rozumiemy, przede wszystkim, ich wzajemne usytuowanie.
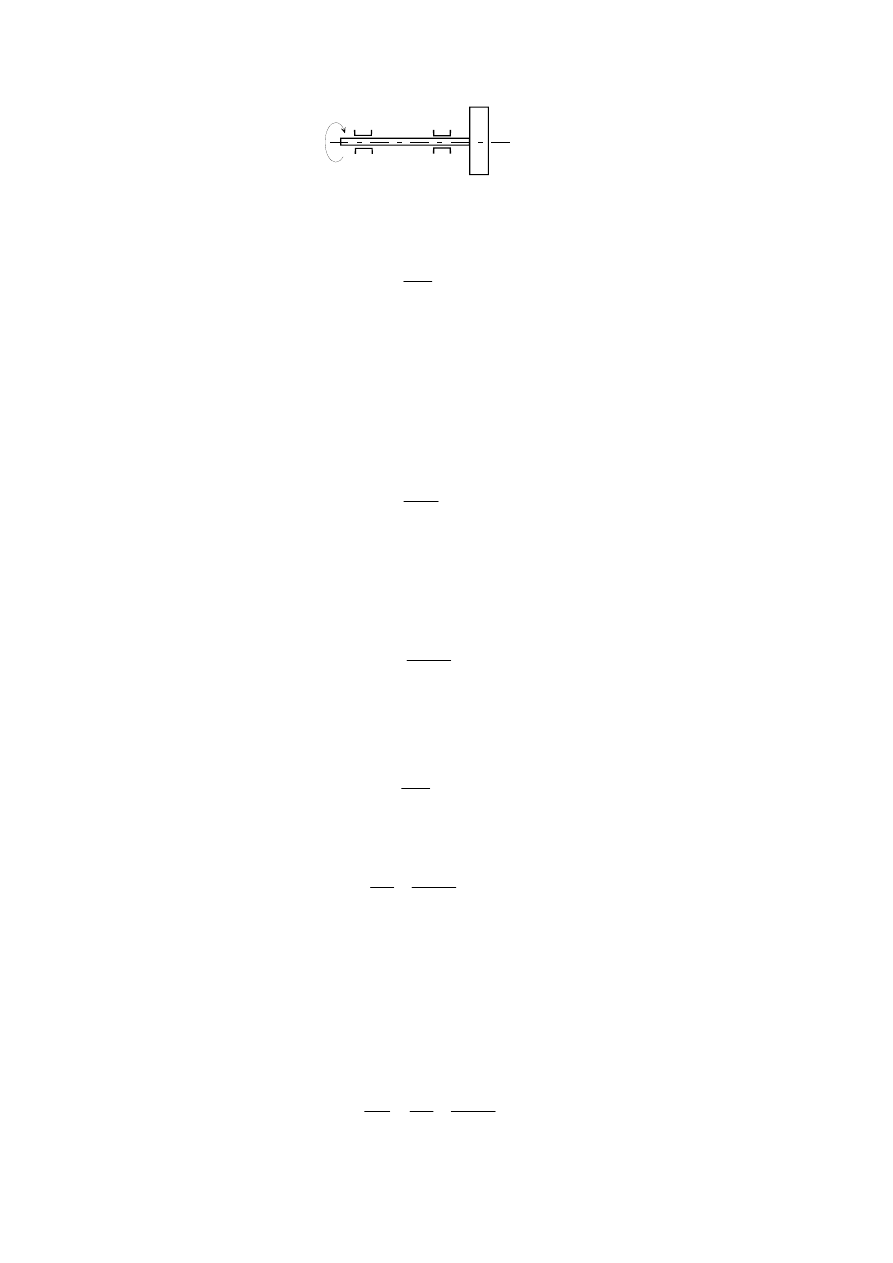
Rysunek 2.30 przedstawia trzy różne usytuowania dwu sprężyn o sztywnościach k
1
i
k
2
względem ruchomej masy i ostoi.
a)
b)
c)
k
1
k
2
k
2
k
1
m
m
m
k
2
k
1
Rys.2.30
.
Podobnie jak sprężyny mogą być usytuowane tłumiki, dlatego nie przedstawiamy
odpowiedniego rysunku.
61
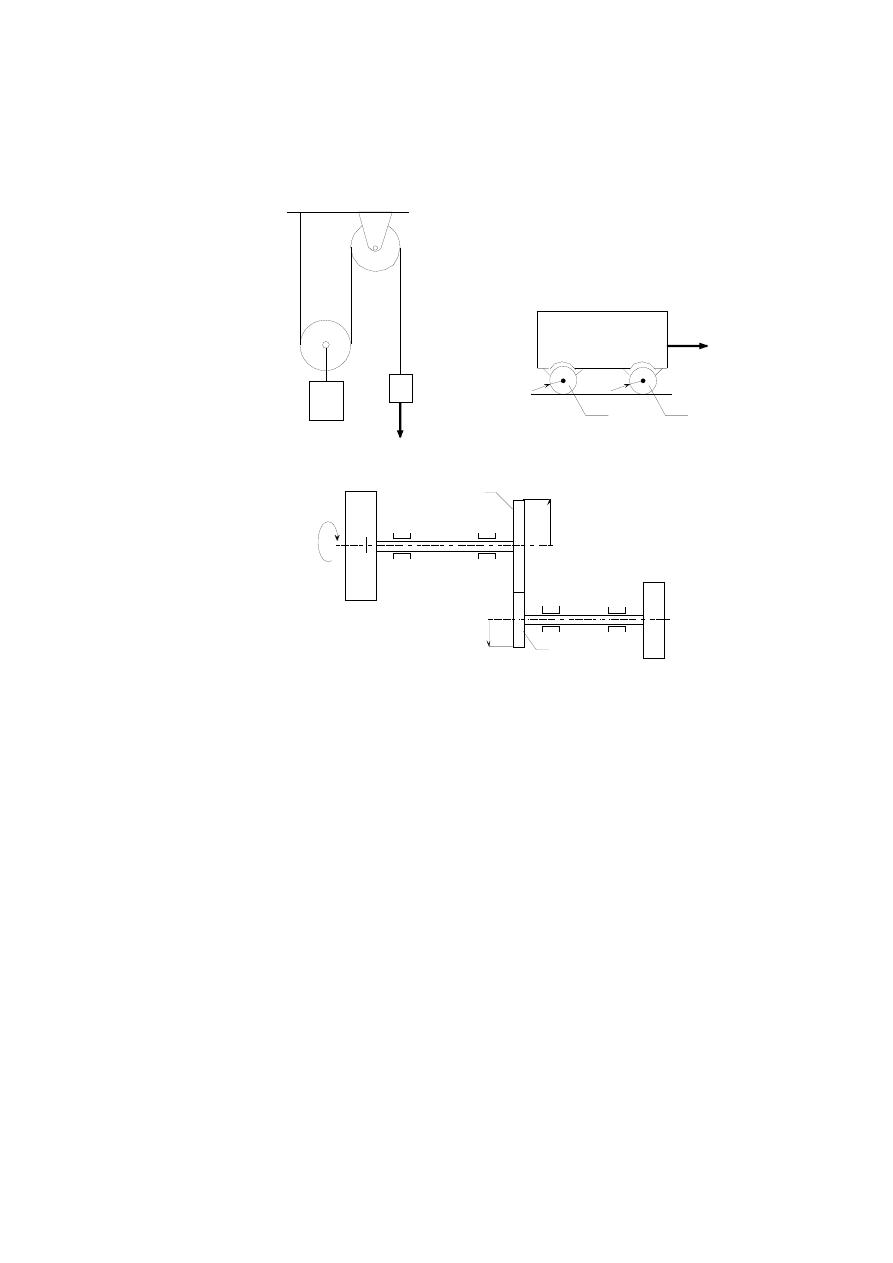
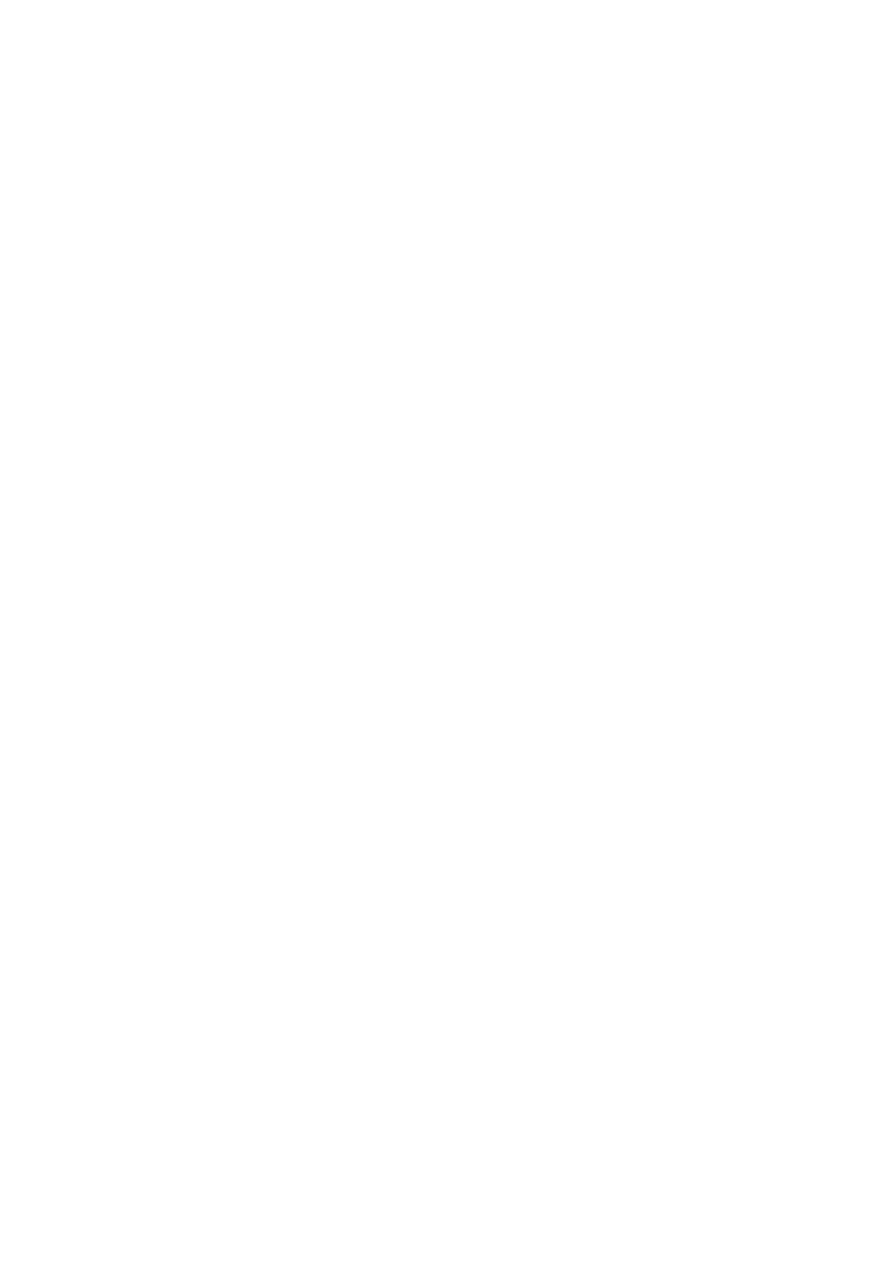
Także elementy bezwładnościowe występują w takich zestawach, że ruch
jednego z nich determinuje ruch innych elementów bezwładnościowych. Rys. 2.31
przedstawia trzy przykłady takich sytuacji.
(c)
b)
a)
I
1
I
2
M
o
(t)
R
1
G
R
2
D
r
r
M
F(t)
m
1
m
2
F(t)
m
m
k
2
k
1
Rys.2.31
W przykładzie z rys. 2.31a, który może być uważany za model windy, ruch
przeciwwagi o masie m
2
pod wpływem siły
F(t) wywołuje ruch masy m
1
.
W przykładzie z rys.2.31b wózek o masie M na czterech kołach o masie m i promieniu r
każde porusza się po linii prostej pod wpływem siły F(t). Jeśli założymy, że koła toczą
się, to ruch wózka determinuje ruch kół.
W przykładzie z rys.2.31c dwa koła zamachowe o momentach bezwładności I
1
i
I
2
połączone są przekładnią zębatą o przełożeniu n = R
1
/
R
2
. Zakładamy, że osiowe
momenty bezwładności wałów i kół przekładni są pomijalnie małe. Jeśli dodatkowo
założymy, że wałki są idealnie sztywne, to ruch koła zamachowego I
1
pod wpływem
momentu M
0
(
t) determinuje ruch koła I
2
. Wszystkie układy z rys.2.31 charakteryzują się
tym, że mimo iż układ składa się z wielu elementów bezwładnościowych, to są to
układy o jednym stopniu swobody. W każdej sytuacji, zresztą niezależnie od liczby
stopni swobody układu, możemy spytać, czy układ wyjściowy da się zastąpić innym
62
równoważnym o mniejszej liczbie elementów. Taką redukcję nazywać będziemy
agregacją. W niniejszym punkcie rozważać będziemy tylko układy o jednym stopniu
swobody i wówczas zadanie agregacji można sformułować nieco dokładniej. Pytamy
więc, czy zespół dwu lub większej liczby elementów danego typu daje się zastąpić
jednym elementem równoważnym, zwanym elementem zastępczym (tzn. sprężyną
zastępczą, masą zastępczą lub tłumikiem zastępczym). Gdy pojawia się pojecie
równoważności natychmiast pytamy „w jakim sensie?”. Tu odpowiedź jest prosta.
Żądamy mianowicie, aby zdolności magazynowania energii lub jej rozpraszania przez
odpowiednie elementy zastępcze były identyczne jak zespołu elementów podlegających
agregacji układu wyjściowego. To energetyczne sformułowanie warunków
równoważności można zastąpić sformułowaniem przyczynowym: te same bodźce
działające na układ zastępczy i układ wyjściowy winny powodować te same skutki.
W szczególności oznacza to, że pod działaniem danej siły winny być identyczne:
a) deformacja sprężyny zastępczej i danego układu sprężyn;
b) spadek prędkości na biegunach tłumika zastępczego i w zespole tłumików
układu wyjściowego;
c) przyspieszenie masy zastępczej i masy, której ruch jest przedmiotem
rozważań.
Przejdźmy zatem do konkretów i w pierwszej kolejności wyznaczymy sztywność
sprężyny zastępczej (lub krócej sztywność zastępczą) dla układów przedstawionych na
rys. 2.30.
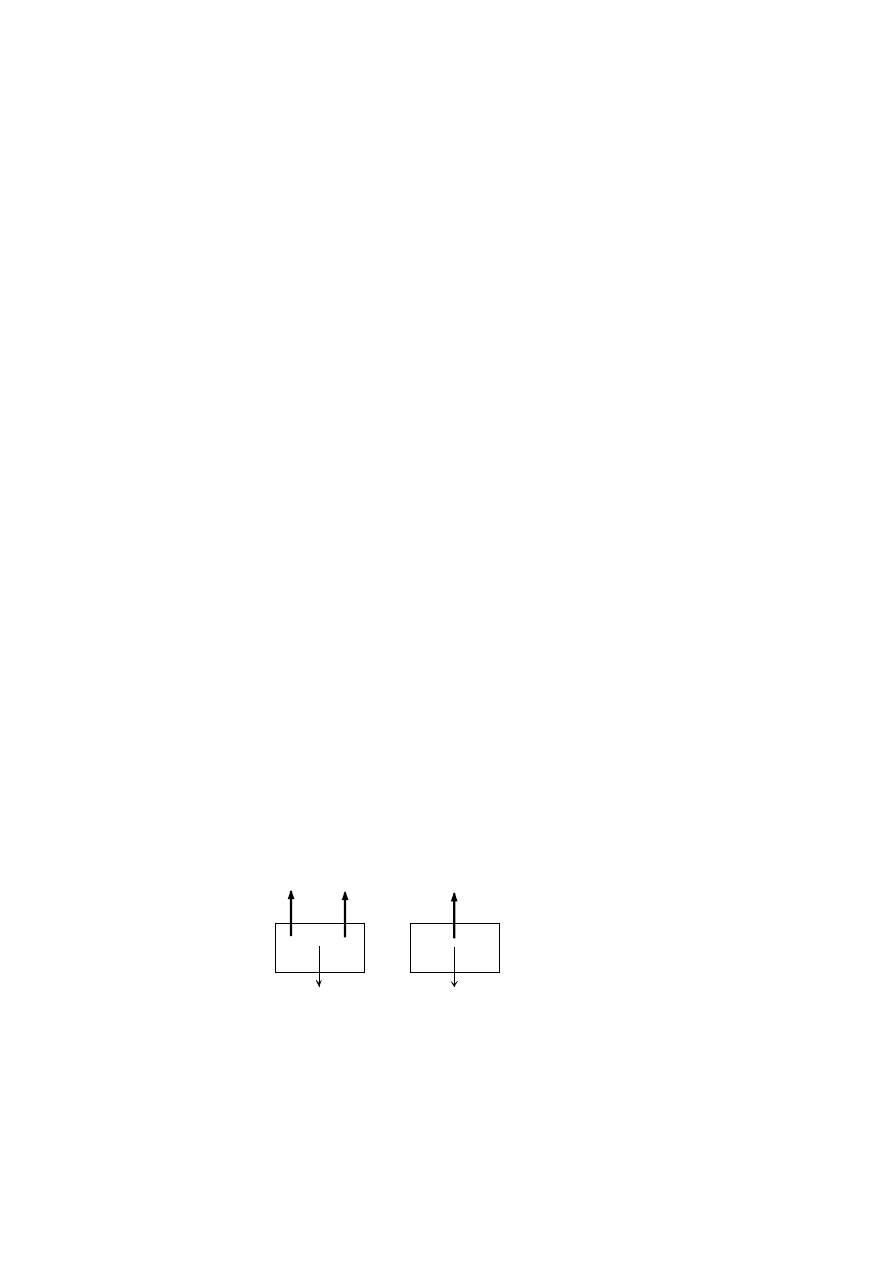
W wypadku równoległego połączenia sprężyn (rys.2.30a) obciążonych pewną siłą, np.
mg ich wydłużenia są identyczne i oznaczamy je symbolem
δ
.
Na rys.2.32a pokazany jest układ sił
mg
mg
a)
b)
δ
2
k
δ
1
k
δ
z
k
Rys.2.32
działających na ciało podtrzymywane przez układ dwu sprężyn równoległych, a na rys.
2.32b siły działające na to samo ciało podtrzymywane przez jedną sprężynę zastępczą.
Na podstawie rys. 2.32 wnioskujemy, że k
z
δ
= k
1
δ
+ k
2
δ
, co po podzieleniu przez
δ
daje
k
z
= k
1
+ k
2
(2.71)
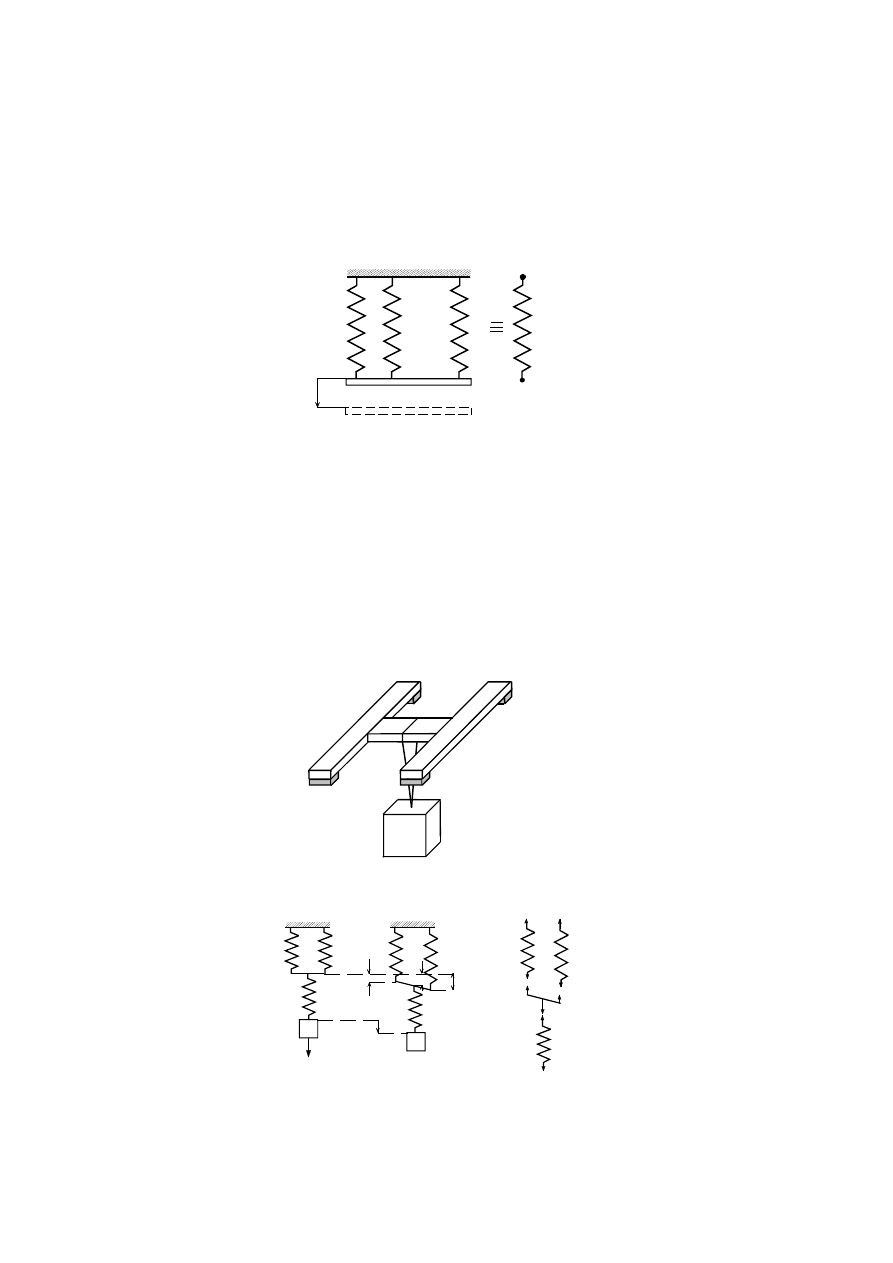
63
W wypadku ogólnym n sprężyn równoległych o sztywnościach k
1
, k
2
,..., k
n
, (zob.
rys.2.33) sztywność zastępcza wyraża się wzorem
∑
=
=
n
i
i
z
k
k
1
(2.72)
k
1
k
2
k
n
...........
A
B
k
z
δ
Rys.2.33
Powyższy wzór jest ważny tylko wtedy, gdy sprężyny podlegają identycznym
odkształceniom, tzn. powierzchnie A i B pozostają równoległe. Takie milczące
założenie zostało w istocie uczynione, co miało swe odzwierciedlenie na rys.2.32a i w
dalszych obliczeniach. Jakie skutki niesie uchylenie tego założenia zobaczymy
rozważając przykład 2.5.
Przykład 2.5. Wyznaczmy sztywność zastępczą układu belek z rys.2.34 przy
obciążeniu układu siłą F w środku belki 3. Długości i sztywności belek podane są na
rysunku.
m
l
1
EI
1
l
3
EI
3
l
2
EI
2
Rys.2.34
m
A
B
k
1
k
2
m
x
x
δ
1
δ
12
δ
2
a)
b)
c)
k
3
k
1
k
2
F/2
F/2
F/2
F/2
F
F
F
k
3
F/2
F/2
Rys.2.35
64
Rozwiązanie. Model sztywnościowy układu belek przedstawiony jest na rys.2.35a .
Każda z belek obciążona jest siłą w środku, a wobec tego sztywności belek, zgodnie ze
wzorem (2.21), wynoszą k
i
= 48EI
i
/l
i
3
.
Oznaczmy symbolem x przemieszczenie pionowe
środka belki 3.
Jest ono wynikiem odkształceń środków belek
δ
i
. Na podstawie warunków zgodności
odkształceń (rys. 2.35b) i rozkładu sił (rys.2.35c) mamy
,
k
F
1
1
2
=
δ
,
k
F
2
2
2
=
δ
3
3
k
F
=
δ
(P.2.18)
oraz
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
=
δ
+
δ
=
δ
2
1
2
1
2
1
12
4
2
k
k
k
k
F
,
(P.2.19)
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
+
=
δ
+
δ
=
3
2
1
2
1
3
12
1
4
k
k
k
k
k
F
x
(P.2.20)
Z definicji sztywność układu jest ilorazem siły i odkształcenia wywołanego tą siłą.
Mamy więc
(
)
2
1
3
2
1
3
2
1
4
4
k
k
k
k
k
k
k
k
x
F
k
+
+
=
=
(P.2.21)
Przy okazji zauważmy, że mimo, iż sprężyny 1 i 2 są równoległe, to sztywność
zastępcza jest równa
2
1
2
1
12
4
k
k
k
k
k
+
=
(P.2.22)
co bezpośrednio wynika z (P.2.19).
Zatem, gdy wydłużenia sprężyn
δ
1
≠
δ
2
, to k
12
≠ k
1
+ k
2
.
Rozważmy teraz szeregowe połączenie sprężyn jak na rys. 2.31b. W tym wypadku
obie sprężyny są rozciągnięte tą samą siłą mg, w rezultacie czego sumaryczne
wydłużenie obu sprężyn pod wpływem tej siły jest
δ = δ
1
+
δ
2
(2.73)
gdzie wydłużenia
δ
1
i
δ
2
spełniają związki
k
1
δ
1
= mg,
k
2
δ
2
= mg
(2.74)
Znaleźć sprężynę zastępczą to tyle, co wyznaczyć jej sztywność k
z
taką, aby sprężyna ta
pod wpływem tej samej siły mg wydłużyła się o
δ
. Zatem dla sprężyny zastępczej
65
z
k
mg
=
δ
(2.75)
Po podstawieniu (2.74) i (2.75) do (2.75) i podzieleniu obu stron wyrażenia przez mg
otrzymujemy
2
1
1
1
1
k
k
k
z
+
=
(2.76)
Zatem dla dwu sprężyn połączonych szeregowo sztywność sprężyny zastępczej wynosi
2
1
2
1
k
k
k
k
k
z
+
=
(2.77)
W przypadku ogólnym n sprężyn o sztywnościach k
1
, k
2
,..., k
n
połączonych szeregowo,
sztywność zastępczą liczymy ze wzoru
∑
=
=
n
i
i
z
k
k
1
1
1
(2.78)
Zauważmy także, że układ sprężyn przedstawiony na rys. 2.30c jest w istocie
połączeniem równoległym. Łatwo to zrozumieć, gdy rozważymy siły działające na ciało
po jego przemieszczeniu ze stanu równowagi o
δ
, co ilustruje rys. 2.36.
mg
δ
1
k
δ
2
k
Rys.2.36
Ten układ sił jest identyczny jak na 2.32a, więc ta kombinacja sprężyn jest w istocie
połączeniem równoległym.
Wyznaczmy teraz sztywność zastępczą na skręcanie K
z
zespołu przekładniowego z
rys. 2.31c. Sztywności skrętne wałów są dane i wynoszą odpowiednio K
1
i K
2.
Rozważmy zatem układ zastępczy (rys.2.37) złożony z koła o momencie bezwładności
względem osi I oraz wałka o sztywności na skręcanie równej K
z
. Oznacza to, że przy
unieruchomionym kole I
66
I
M
0
K
z
Rys.2.37
moment skręcający M
0
przyłożony na drugim końcu wału spowoduje skręcenie tego
końca o kąt
ϕ
0
taki, że
z
K
M
0
0
=
ϕ
(2.79)
Powtórzmy ten eksperyment myślowy dla zespołu przekładni z rys. 2.31c. Blokujemy
koło I
2
, a do koła I
1
przykładamy moment skręcający M
0
. Ze względu na istniejącą
przekładnię o przełożeniu n, moment skręcający wał dolny o sztywności K
2
jest równy
M
0
/n
, a odpowiadający mu kąt skręcania wału wynosi
2
0
2
nK
M
=
ϕ
(2.80)
Ponieważ koło I
2
jest unieruchomione, koło zębate D obróci się też o kąt
ϕ
2
, a
odpowiedni kąt obrotu koła G jest n razy mniejszy, tzn.
2
2
0
K
n
M
G
=
ϕ
(2.81)
Kąt skręcania wału górnego jest wynikiem przyłożenia momentu skręcającego M
0
i
wynosi
1
0
1
K
M
=
ϕ
(2.82)
a zatem całkowity obrót koła I
1
jest
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
ϕ
+
ϕ
2
2
1
0
1
1
1
K
n
K
M
G
(2.83)
Zastępcza sztywność na skręcanie to taka, że ten sam moment powoduje ten sam skutek
– tu obrót koła zamachowego o momencie I
1
, czyli
ϕ
0
=
ϕ
1
+
ϕ
G
(2.84)
Zatem, po podstawieniu do (2.84) zależności (2.79) oraz (2.83) i podzieleniu przez M
0
mamy
2
2
1
1
1
1
K
n
K
K
z
+
=
(2.85)
67
Ten sam wynik otrzymamy stosując kryterium energetyczne. Istotnie, energia
potencjalna odkształceń sprężystych wałków w wyniku ich skręcania wyraża się
wzorem:
2
2
2
2
1
1
2
1
2
1
2
1
ϕ
+
ϕ
=
+
=
K
K
V
V
V
(2.86)
Pod działaniem momentu skręcającego M
0
, kąty
ϕ
1
i
ϕ
2
wyrażają się odpowiednio
wzorami (2.82) i (2.80), czyli
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
+
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
+
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
2
2
1
2
0
2
2
0
2
2
1
0
1
1
1
2
1
2
1
2
1
K
n
K
M
nK
M
K
K
M
K
V
(2.87)
Z drugiej strony energia potencjalna wałka o sztywności zastępczej K
z
, z
uwzględnieniem wzoru (2.79), wyraża się wzorem:
z
z
z
z
K
M
K
M
K
K
V
2
0
2
0
2
0
2
1
2
1
2
1
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
=
ϕ
=
(2.88)
Z porównania prawych stron wyrażeń (2.87) i (2.88) otrzymujemy zależność identyczną
jak (2.85), co wskazuje na możliwość stosowania obu kryteriów równoważności
układu.
Wyznaczenie tłumika zastępczego jest w zasadzie identyczne jak wyznaczanie
sztywności zastępczej. W istocie sprowadza się do rozważenia sił działających na
tłumiki i spadków prędkości na ich biegunach. To podobieństwo postępowania
zilustrujemy tylko jednym przykładem równoległego połączenia tłumików (rys.2.38).
F(t)
c
1
c
2
Rys.2.38
Załóżmy, że do układu dwóch tłumików równoległych przyłożona jest siła F(t), która
wymusza ruch dolnych końcówek tłumików z prędkością
x&
(rys. 2.38a). Siły oporów
ruchu generowane przez tłumiki są
,
x
c
R
&
1
1
=
x
c
R
&
2
2
=
Poszukujemy tłumika zastępczego, który przy ruchu punktu A z prędkością
x&
generować będzie siłę
x
c
x
)
c
c
(
R
R
R
z
&
& =
+
=
+
=
2
1
2
1
Współczynnik tłumienia tłumika zastępczego jest więc
c
z
= c
1
+ c
2
(2.89)
68
Ogólnie dla układu n tłumików o współczynnikach c
1
,c
2
,...,c
n
, połączonych równolegle
tłumienie zastępcze wyraża się wzorem
∑
=
=
n
i
i
z
c
c
1
(2.90)
Tu, podobnie jak w wypadku wzoru (2.72), zwracamy uwagę, że tłumienie zastępcze
można wyznaczać ze wzoru (2.90) tylko wtedy, gdy spadki prędkości na końcówkach
tłumików równoległych są takie same.
W rzadko występującym w praktyce przypadku szeregowego połączenia tłumików,
współczynnik c
z
tłumika zastępczego może być wyliczony z zależności analogicznej do
(2.78) tyle, że w miejsce współczynników sztywności k podstawiamy współczynniki c.
Proces agregacji elementów bezwładnościowych najwygodniej jest prowadzić
metodą energetyczną, tj. przyrównując energię kinetyczną układu wyjściowego do
energii kinetycznej elementu zastępczego. Dla przykładu rozważmy wózek z rys 2.31b.
Przykład 2.6. Należy wyznaczyć masę zastępczą M
z
dla układu z rys.2.31b.
Rozwiązanie. Załóżmy, że wózek porusza się z prędkością
x&
. Z tą samą prędkością
porusza się środek każdego z czterech kół wózka. Stąd wynika, że prędkość kątowa
każdego koła jest
r
/
x&
=
ω
. Energia kinetyczna układu jest więc
(
)
(
)
2
2
2
2
2
2
2
x
m
6
M
2
1
r
x
mr
2
x
m
4
M
2
1
I
2
1
x
m
2
1
4
x
M
2
1
T
&
&
&
&
&
+
=
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎠
⎞
⎜
⎝
⎛
+
+
=
⎟
⎠
⎞
⎜
⎝
⎛
ω
+
+
=
Z drugiej strony energia kinetyczna masy zastępczej wyraża się wzorem
2
2
1
x
M
T
z
&
=
.
Z porównania prawych stron obu wyrażeń na energię kinetyczną wynika, że
M
z
= M + 6m
Proces agregacji w układach o wielu stopniach swobody, a także dla układów ciągłych
jest bardziej skomplikowany. Ponieważ wymaga on wiedzy o własnościach tego typu
układów, więc nie będziemy rozwijać tego tematu.
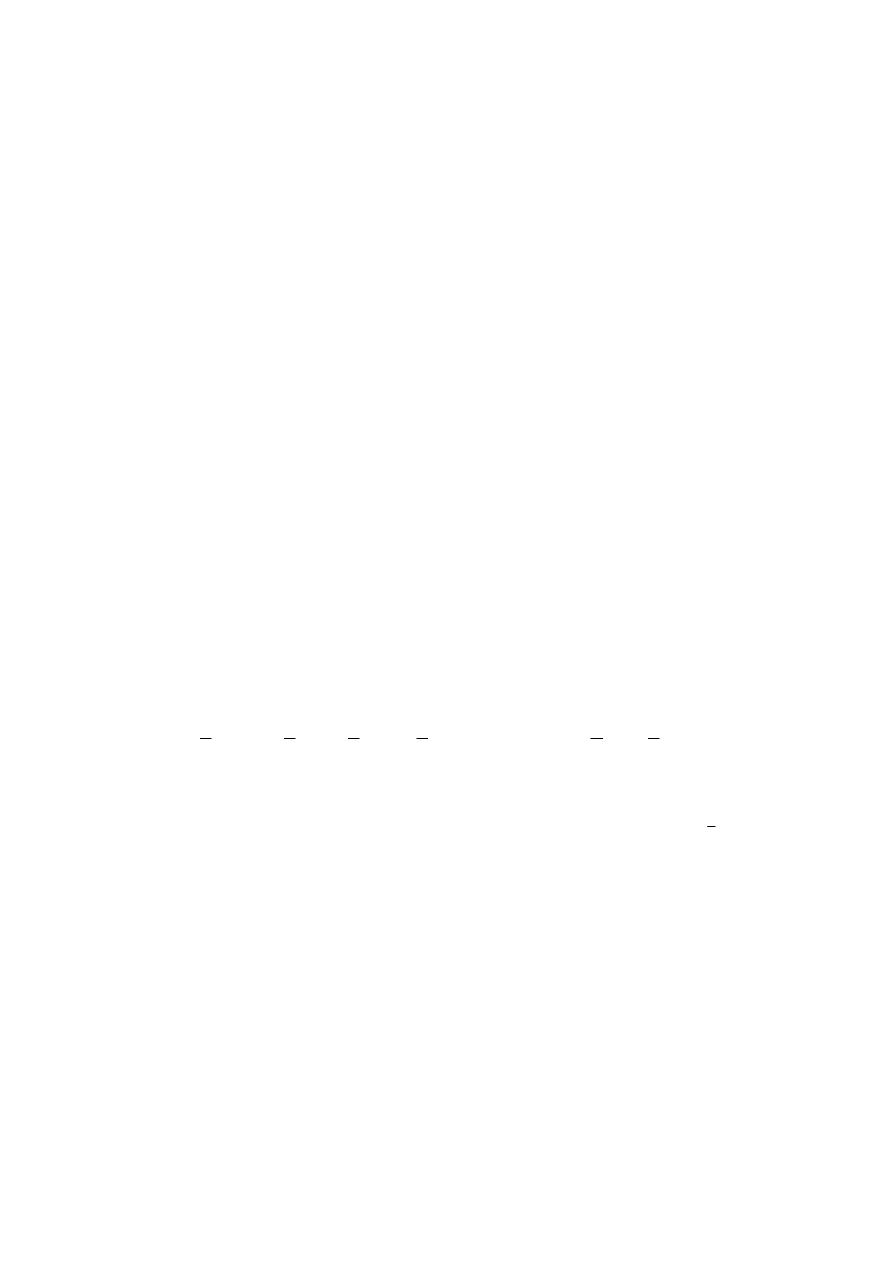
2.7 Przykład budowy modelu fizycznego tablicy przyrządów pokładowych
2.7.1 Do czego model ma służyć?
69
Dla ustalenia uwagi załóżmy, że tablica przyrządów pokładowych ma być zabudowana
na śmigłowcu. Bezpieczeństwo i komfort pilotażu wymaga, by wskazania przyrządów
były czytelne. W tym celu tablica musi być tak zamocowana, by nie udzielały się jej
drgania generowane przez samą maszynę lub jej otoczenie, np. podmuchy wiatru.
Często źródłem tych drgań jest silnik (rys.2.39). Zabiegi zmierzające do osiągnięcia
takiego stanu, w którym na tablicę przyrządów nie mają wpływu (lub ich wpływ jest
ograniczony) drgania innych elementów śmigłowca, nazywane są wibroizolacją.
Wibroizolację tablicy przyrządów realizuje się pomocą elementów podatnych, którymi
są zwykle amortyzatory gumowe o nieliniowej charakterystyce sprężystej i tłumiennej.
Śmigłowiec drga, skutkiem czego tablica poddana jest wymuszeniu kinematycznemu.
Zadanie polega na tym, aby przy znanym wymuszeniu tak dobrać charakterystyki
elementów zawieszenia tablicy, aby jej poziom drgań był akceptowany.
Silnik
śmigłowca
Kadłub
Tablica
przyrządów
Przyrząd
pomiarowy
1
3
1
Drgania silnika
2
Drgania kadłuba w miejscu
zamocowania tablicy
Drgania tablicy
Błąd wskazań przyrządu
3
4
4
2
Rys. 2.39
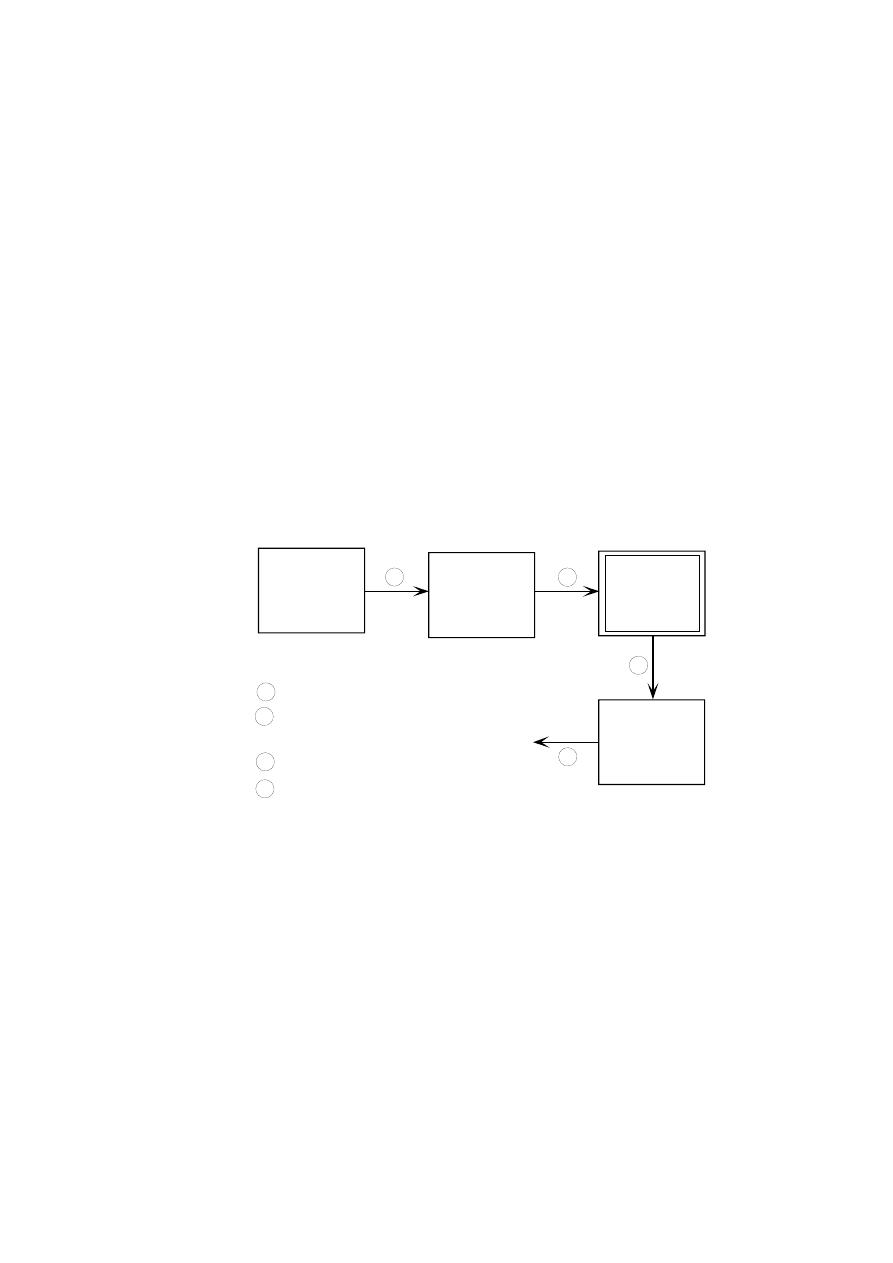
2.7.2 Założenia do budowy modelu fizycznego
Podstawowym zabiegiem jest dyskretyzacja, czyli zastąpienie tablicy - obiektu
o parametrach rozłożonych modelem o parametrach skupionych. Dochodzi się do tego
w sposób następujący: tablica przyrządów jest zespołem konstrukcyjnym pomyślanym
jako złożona płyta, z licznymi wykrojami (rys. 2.40), „sama w sobie” względnie
sztywna, ale przecież odkształcalna, w której zamocowane są różne przyrządy.
Elementy podatne, za pomocą których tablica jest zamocowana do śmigłowca. są
rozłożone na obwodzie tablicy, a ich podstawową cechą jest podatność oraz zdolność
do absorbcji energii w czasie drgań. Masa tych elementów jest znacznie mniejsza niż
70
masa tablicy (zwykle o dwa rzędy wielkości), dlatego można przyjąć, że są to elementy
pozbawione masy („bezmasowe”), a ich jedynymi cechami mechanicznymi jest
podatność oraz rozpraszanie energii drgań.
tablica przyrządów
elementy
mocujące
Fragment
kadłuba
śmigłowca
Rys. 2.40
Obserwacje tablicy w czasie wstępnej eksploatacji nasuwają spostrzeżenie, że
źródłem dyskomfortu są drgania tablicy "jako całości", a nie drgania przyrządów
będące rezultatem jej odkształceń. Tablicę modelujemy więc jako ciało sztywne o
pewnej masie m. Tak więc wykonaliśmy dekompozycję tablicy, polegającą na
wyodrębnieniu w niej charakterystycznych elementów, którym przypisaliśmy pewne
cechy dominujące, pomijając drugorzędne.
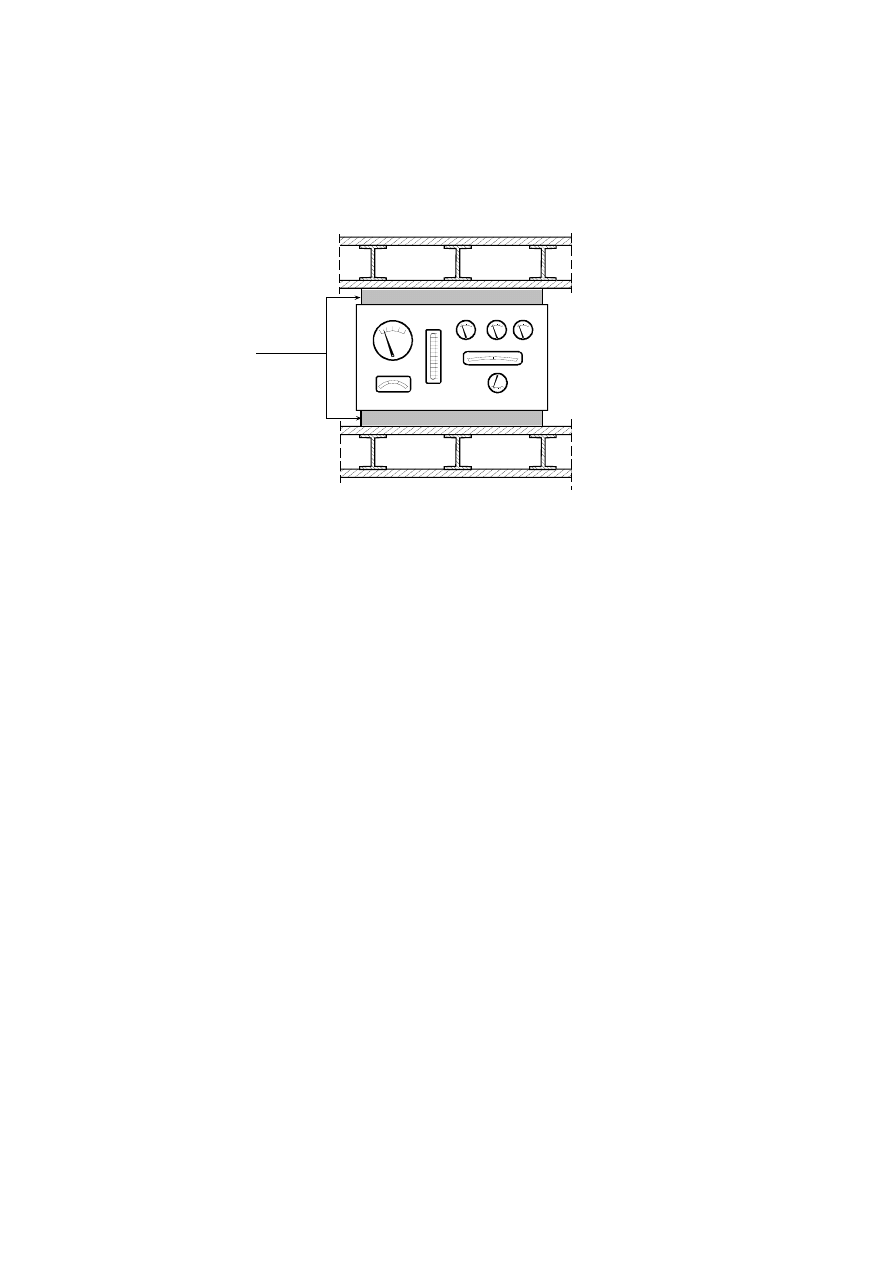
Inną obserwacją ze wstępnej eksploatacji jest to, że dominującym ruchem
tablicy są jej drgania w płaszczyźnie pionowej. Upoważnia to do przyjęcia założenia, że
tablica jest ciałem, zamocowanym podatnie w sposób umożliwiający jej
przemieszczenia w płaszczyźnie pionowej. W ten sposób tablica została sprowadzona
do modelu dyskretnego o jednym stopniu swobody. Mówimy, że dokonana została
redukcja
stopni swobody.
Skoro zgodziliśmy się co do tego, że tablicę wraz z wyposażeniem zastąpić
można ciałem sztywnym, to jej kształt w rozpatrywanym zagadnieniu przestaje
odgrywać istotną rolę. Rozbudowaną formę tablicy redukujemy więc do jej
odwzorowania symbolicznego (rys. 2.41).
71
x(t)
y(t)
Tablica
Rys. 2.41
Stwierdziliśmy powyżej, że drgania tablicy wymuszane są drganiami
konstrukcji, do której jest mocowana. Zachodzi pytanie, na ile jest to oddziaływanie
dwukierunkowe, tj. czy drgania tablicy nie mają wpływu na drgania jej otoczenia. Tu
odpowiedź wydaje się oczywista: sztywna konstrukcja pojazdu oraz jego masa
wielokrotnie większa do masy tablicy (np. więcej niż 100 razy) sprawia, że ruch
względny tablicy w jej otoczeniu nie oddziałuje na to otoczenie, tzn., że ruch pojazdu
jest w pełni niezależny od ruchu tablicy.
Założenie tego rodzaju powinno być jednak starannie przemyślane, bowiem
stosowanie dynamicznego eliminatora drgań wskazuje na możliwość istnienia takiego
sprzężenia.
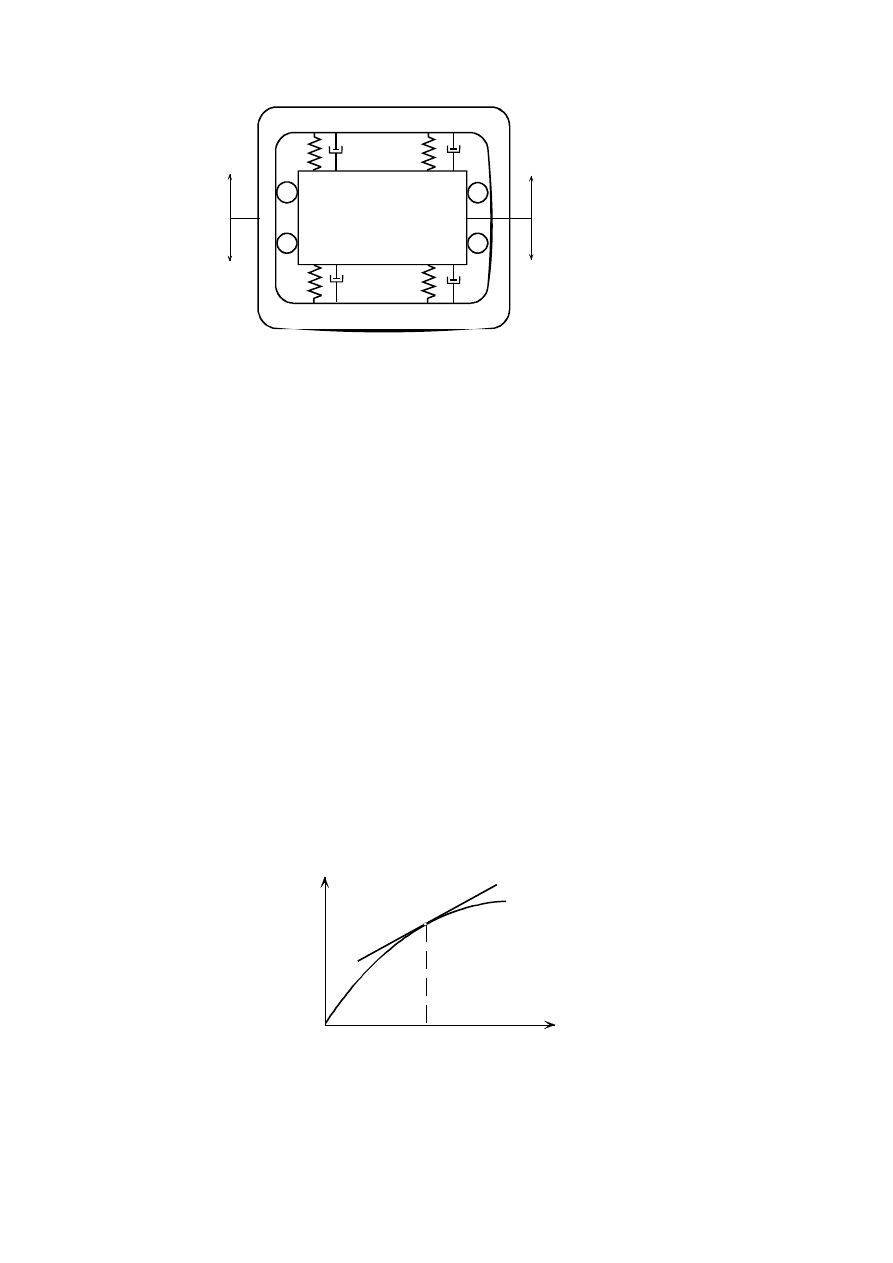
Jak już wiemy, tablica zamocowana jest za pomocą specjalnych elementów
podatnych, które są kształtowane w taki sposób, że ich charakterystyka sprężysta jest
zwykle nieliniowa, a ponadto charakteryzują się zdolnością do absorbowania energii.
Przykład ich charakterystyki pokazany jest na rys. 2.42.
si
ła
odkształcenie
punkt pracy
Rys.
2.42
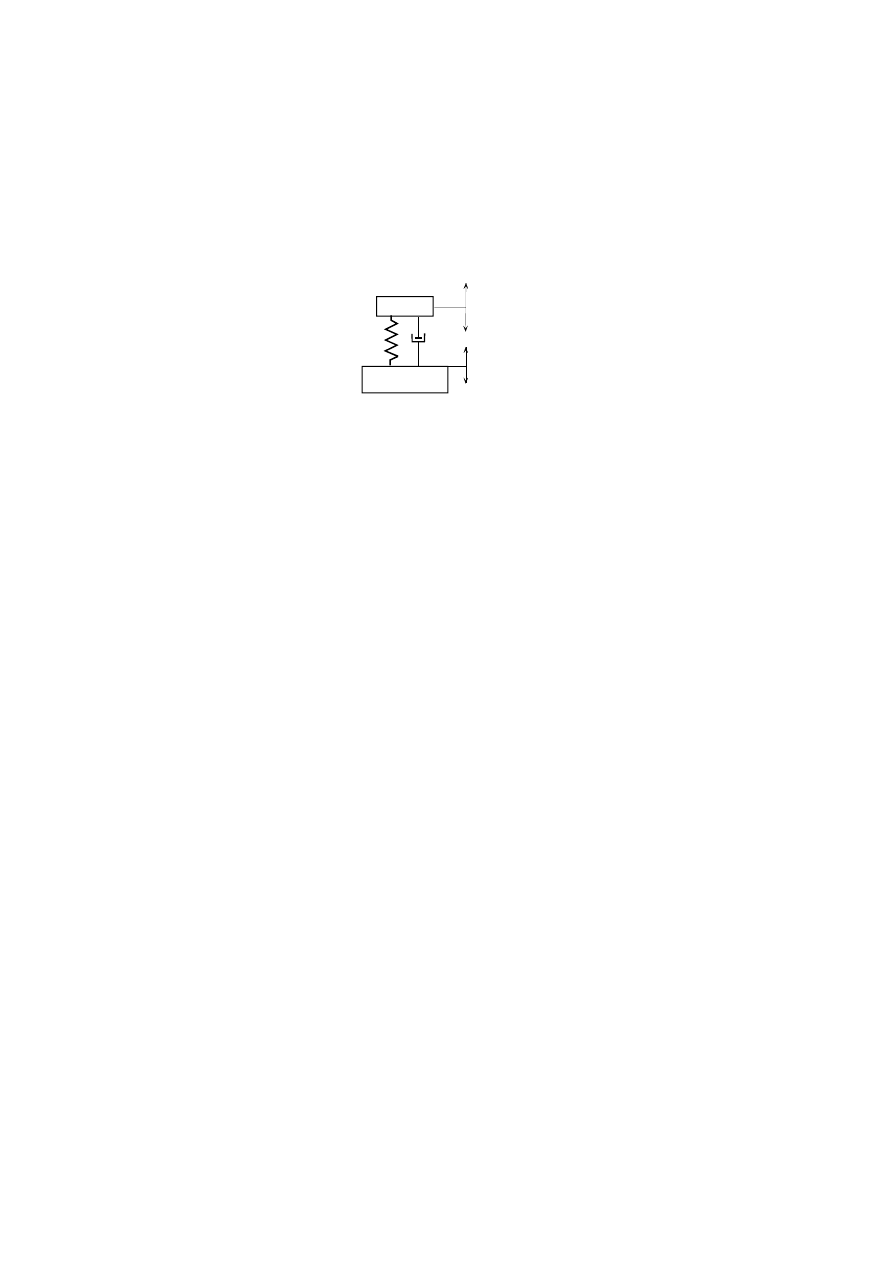
W modelu naszym decydujemy się na linearyzację tych charakterystyk, co
polega na ich zastąpieniu przez przybliżenie liniowe w otoczeniu punktu pracy. W
72
efekcie sprowadzamy charakterystyki sprężyste zawieszenia do sztywności k, a jego
własności polegające na absorbcji energii do równoważnego tłumienia lepkiego o
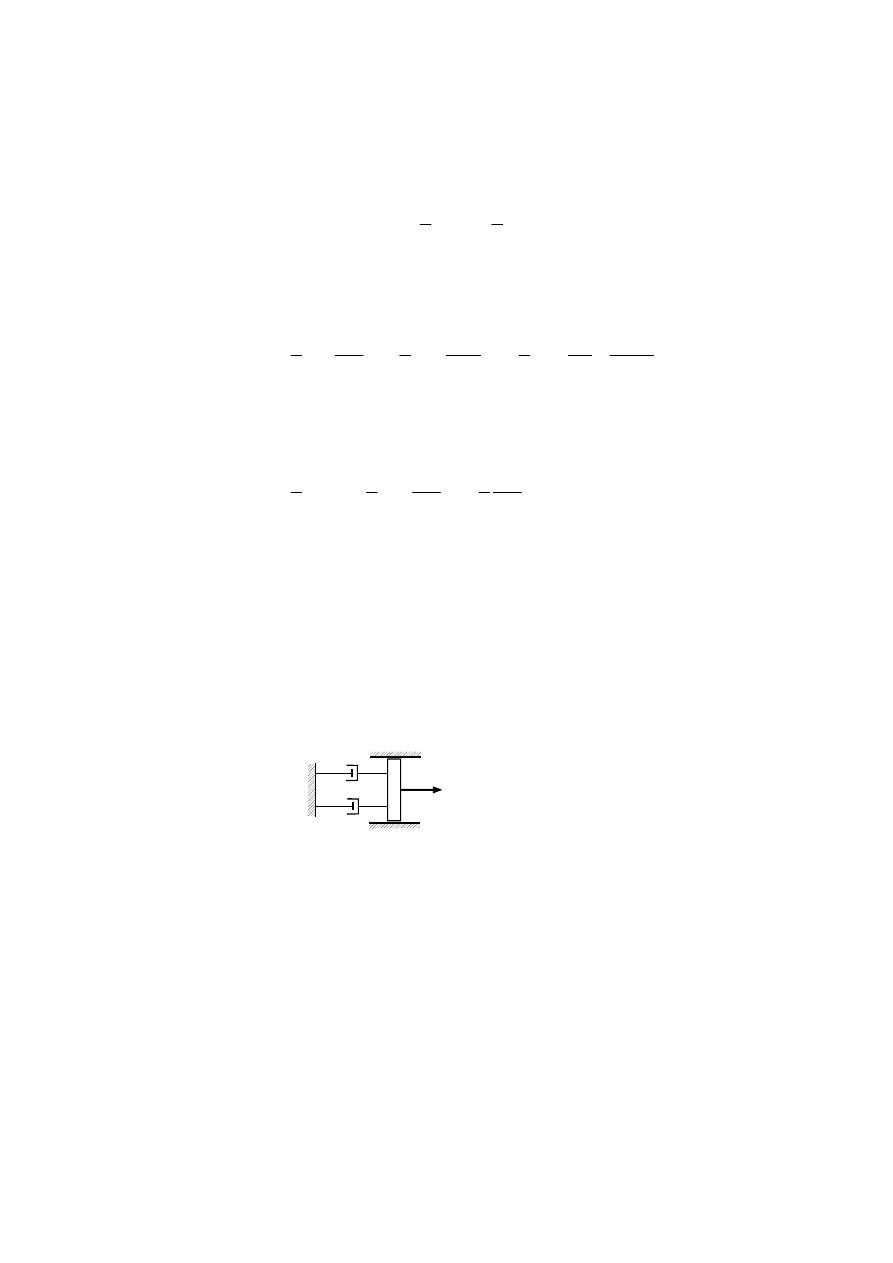
współczynniku c. W rezultacie opisanego postępowania otrzymujemy model fizyczny
tablicy pokazany na rys. 2.43.
x(t)
y(t)
k
b
Rys.
2.43
Budowa modelu fizycznego jest pierwszym etapem modelowania. Dalsze etapy
to: budowa modelu matematycznego i identyfikacja jego parametrów.
2.7.3 Podsumowanie: wykaz działań upraszczających
Rozważony przykład tworzenia modelu tablicy daje asumpt do sporządzenia
listy typowych zabiegów i założeń upraszczających (przy modelowaniu obiektów o
naturze mechanicznej). Oczywiście, ze względu na to, że tablica nie jest obiektem
uniwersalnym, jej modelowanie fizyczne nie mogło zawierać wszystkich
wyszczególnionych haseł.
Tak więc możemy się spotkać z następującymi działaniami:
•
wyodrębnienie elementów podstawowych,
•
podział elementów na grupy o różnych właściwościach (dekompozycja),
•
uproszczenie geometrii wyodrębnionych elementów,
•
zastąpienie właściwości rozłożonych przez skupione,
•
przyjęcie zależności liniowych między przyczynami i skutkami (linearyzacja),
•
pomijanie szumów otoczenia i pomiarów,
•
redukcja liczby stopni swobody.
W trakcie tych działań należy dostrzegać możliwość uwzględniania lub pominięcia w
modelu następujących cech:

73
•
niejednorodność elementów obiektu (gdyż są wykonane z materiałów o różnych
gęstościach),
•
zmienność parametrów w czasie,
•
niedookreślenie wartości parametrów,
•
oddziaływanie obiektu z otoczeniem.
2.8 O SPECYFICE MODELOWANIA UKŁADÓW MECHANICZNYCH
Specyfikę układów mechanicznych najłatwiej dostrzec na tle innych układów
fizycznych. Rozważmy więc na wstępie popularne w technice układy elektryczne.
Każdy z podstawowych elementów tych układów, czyli opornik, cewka indukcyjna i
kondensator może być scharakteryzowany za pomocą tylko jednej stałej odpowiednio
R
, L i C. Działanie tych elementów jest zawsze takie samo niezależnie od usytuowania
elementu w obwodzie elektrycznym (przy pominięciu wpływu wysokich częstości). Są
to, jak wiemy z p.2.4, elementy dwubiegunowe, włączane w obwód przewodowo, a ich
usytuowanie w przestrzeni nie odgrywa żadnej roli. Są to ponadto elementy liniowe, a
zatem podobnie jak elementy układów regulacji automatycznej, mogą być
charakteryzowane za pomocą funkcji przenoszenia sygnału, czyli tzw. transmitancji.
Elementy te kontaktują się z resztą układu w ściśle określonych miejscach zwanych
wejściem i wyjściem. Zmiana przestrzennego położenia elementu regulacji
automatycznej nie wpływa na transmitancję elementu.
Inaczej jest w wypadku elementów układów mechanicznych. Ich usytuowanie w
przestrzeni, w szczególności względem innych elementów układu, nałożone na nie
ograniczenia ruchu, a także sposób definiowania współrzędnych w istotny sposób
zmieniają model matematyczny elementu. Zmiana nie wynika z niestacjonarności
elementu. Przeciwnie, zakładamy, że charakterystyki elementu w ustalonym układzie
odniesienia są niezmienne w czasie. Ale z racji różnych możliwości włączenia
elementu mechanicznego do układu jego model matematyczny w konkretnych
warunkach pracy (a jest ich praktycznie nieskończenie wiele) i przy konkretnych
więzach może dalece odbiegać od podstawowego modelu elementu, czyli od jego
równania biegunowego. Jest jeszcze jeden czynnik, który komplikuje wykorzystanie
równań biegunowych elementów sprężystych i tłumiących. Otóż współrzędne, które
wprowadza się do opisu zjawisk mechanicznych zwykle wiąże się z elementem
bezwładnościowym (punktem materialnym, bryłą sztywną). Współrzędne adekwatne
74
dla opisu położenia elementu bezwładnościowego zastosowane do elementów
sprężystych lub tłumiących mogą powodować znaczną komplikację równań
biegunowych tych elementów. Często ta komplikacja jest tak duża, że nie da się
wykorzystać równań biegunowych elementów sprężystych i tłumiących jako gotowego
składnika modelu matematycznego układu mechanicznego. Aby rozjaśnić te trudne
sprawy weźmy pod uwagę podstawowy element układów mechanicznych - sprężynę
liniową, której równanie (2.16) jest dobrze znane. Teraz jednak współpracuje ona z
elementem bezwładnościowym.
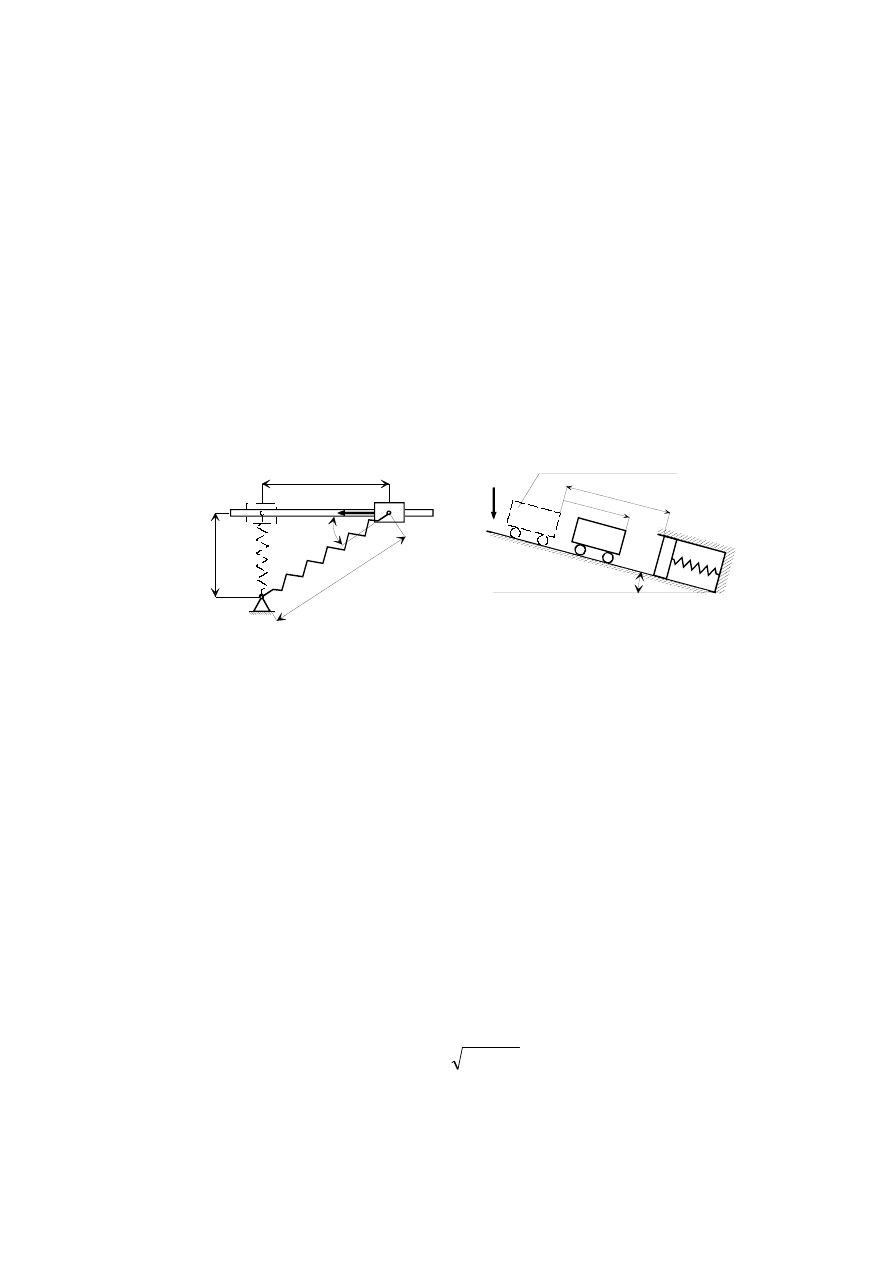
Rozważmy więc trzy układy drgające, w których występuje ta sama sprężyna
liniowa o sztywności k i długości swobodnej l
0
. Układ pierwszy to oscylator
harmoniczny z p.1.2, dwa pozostałe przedstawione są na rys 2.44a i 2.44b.
a)
b)
x
a
P
x
α
B
l
A
0
α
g
a
x
położenie początkowe
Rys.2.44
a,
b
Współrzędna x we wszystkich trzech układach opisuje położenie masy. Pytamy o model
sił sprężystych, czyli o siłę P
x
działającą na masę na kierunku jej ruchu, a pochodzącą
od sprężyny. Aby uniknąć nieporozumień ustalmy, że siłę działającą na sprężynę
oznaczać będziemy symbolem F, zaś siłę oddziaływania sprężyny na masę symbolem
P. Oczywiście zachodzi związek
P
= - F
(2.91)
W układzie oscylatora P
x
= -kx, czyli model oddziaływań sprężystych zachowuje postać
równania (2.16). Zobaczmy jak sprawa wygląda w pozostałych układach.
W układzie z rys. 2.44(a) dopuszczamy napięcie wstępne sprężyny, tzn. przyjmujemy,
że A0 = a > l
0
. Wydłużenie sprężyny w położeniu B suwaka określonym współrzędną x,
jest
Δ
l = l – l
0
= (a
2
+ x
2
)
1/2
– l
0
. Zatem
(
)
0
2
2
l
x
a
k
l
k
F
−
+
=
Δ
=
(2.92)
Siła P
x
= Pcos
α
, gdzie cos
α
= x/l. Wziąwszy pod uwagę te związki oraz (2.91) i (2.92)
mamy

75
P
F
x
l
kx
l
l
kx
l l
l
kx
l
a
x
x
= −
= −
= −
−
= −
−
+
⎛
⎝
⎜
⎞
⎠
⎟
Δ
0
0
2
2
1
(2.93)
Zarówno z (2.93), jak i z (2.92) odczytujemy, że obie siły są nieliniowe, a model
oddziaływań sprężyny jest różny od jej równania biegunowego.
Rozważmy teraz układ z rys.2.44(b). W zakresie x < a wózek może poruszać się
swobodnie. Gdy położenie wózka x przekracza a, napotyka on zderzak umocowany na
sprężynie. Pojawia się oddziaływanie na wózek siłą P
x
pochodzącą od sprężyny. Zatem
(
)
⎩
⎨
⎧
≥
−
−
<
=
a
x
gdy
a
x
k
a
x
gdy
P
x
0
(2.94)
Ponownie model oddziaływań sprężyny w całym zakresie zmian współrzędnej x jest
nieliniowy mimo, że jest liniowy w obu zakresach, tzn., gdy x < a oraz gdy x
≥
a
.
Skąd więc wynikają nieliniowości modelu oddziaływań sprężystych mimo, iż sam
element pozostaje stale liniowy? Otóż w układach mechanicznych istotną rolę odgrywa
geometria, czyli wzajemne usytuowanie elementów względem siebie, pojawianie się
luzów, sposoby odmierzania współrzędnych.
W praktyce, dla konkretnego usytuowania elementu w układzie musimy tworzyć
adekwatny model jego oddziaływań z pozostałą częścią układu. Analogiczna sytuacja
jest z elementami tłumiącymi. Nieskończona liczba sposobów włączenia elementów do
układu mechanicznego czyni praktycznie niemożliwe katalogowanie ich modeli
matematycznych. Porzućmy zatem pomysł przedstawienia pełnego katalogu modeli
elementów mechanicznych na rzecz:
a) znajomości kilku charakterystyk podstawowych elementów mechanicznych;
b) umiejętności wyznaczania sił oddziaływań elementów sprężystych i tłumiących na
ciała;
c) poznania metod generowania równań ruchu ciał.
Nasze rozważania skoncentrowane były dotąd na elementach „modelowych” tj.
takich, które posiadając jedną własność nie zawierają „domieszki” innej własności, np.
bryła sztywna ma masę, ale jej odkształcalność jest zaniedbywalna, sprężyna zaś jest
elementem odkształcalnym którego miarą jest sztywność sprężyny, ale jej masa
i właściwości tłumiące są bliskie zera, a w konsekwencji pomijane.
W rzeczywistych konstrukcjach mechanicznych dość rzadko występują te sterylne
elementy „modelowe”, natomiast mamy do czynienia z belkami wspornikowymi,
powłokami, podkładami, linami, pasami transmisyjnymi, wałami, kołami, itp.
76
Wszystkie one posiadają masę rozłożoną w pewnym podobszarze przestrzeni, a ponadto
nie są pozbawione własności sprężystych i tłumiennych. Innymi słowy elementy
konstrukcji mechanicznych to zazwyczaj układy ciągłe będące konglomeratem trzech
podstawowych własności mechanicznych: bezwładności, odkształcalności i własności
tłumiących.
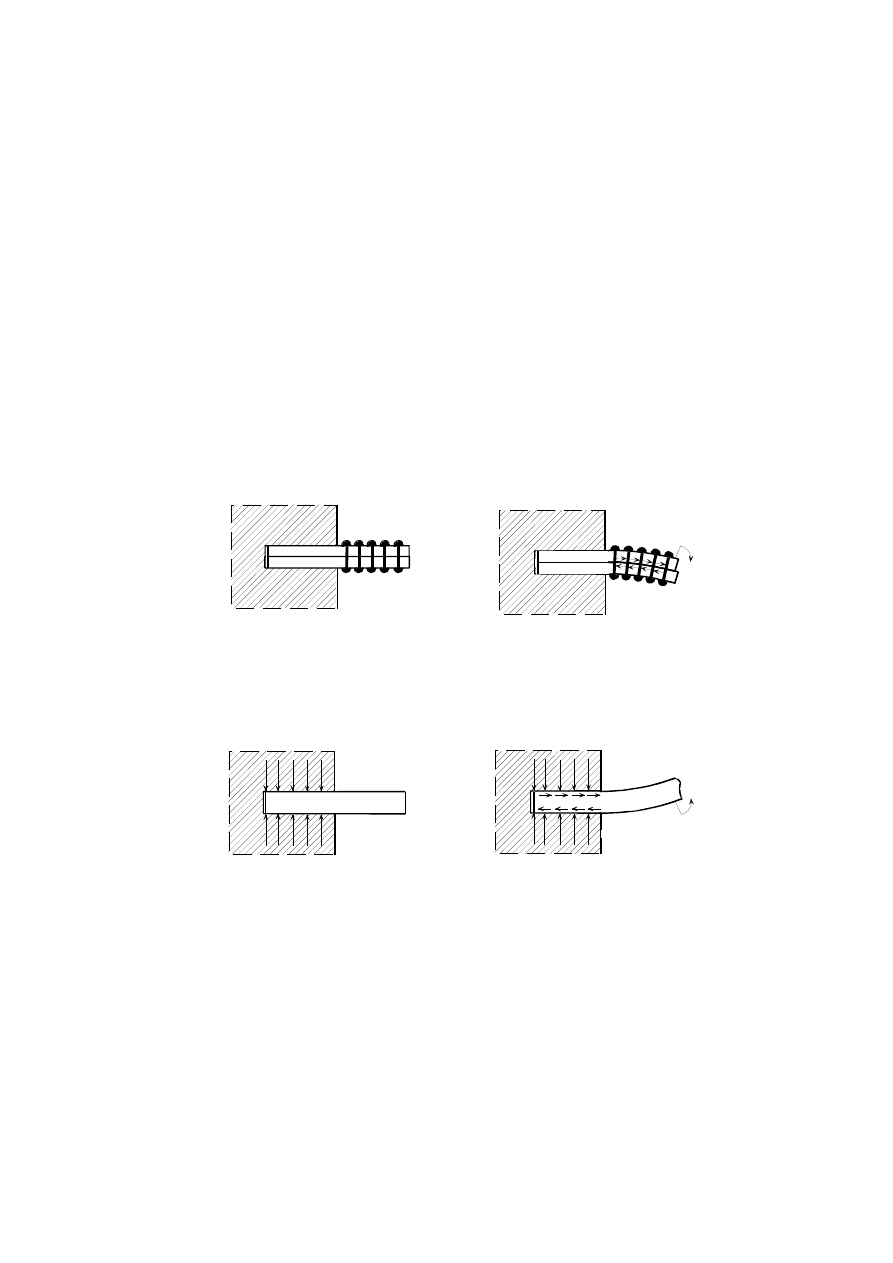
Specyfika układów mechanicznych przejawia się także w tym, że często zjawiska
odkształceń sprężystych i rozproszenia energii występują łącznie. W konsekwencji
trudno mówić oddzielnie o elementach sprężystych i tłumiących. Z podobną sytuacją
spotykamy się próbując modelować siły w połączeniach elementów konstrukcji,
zwłaszcza w połączeniach nitowanych (rys2.45a,b) i wtłaczanych (rys.2.46a,b)
a)
b)
M
Rys.2.45
a)
b)
M
Rys.2.46
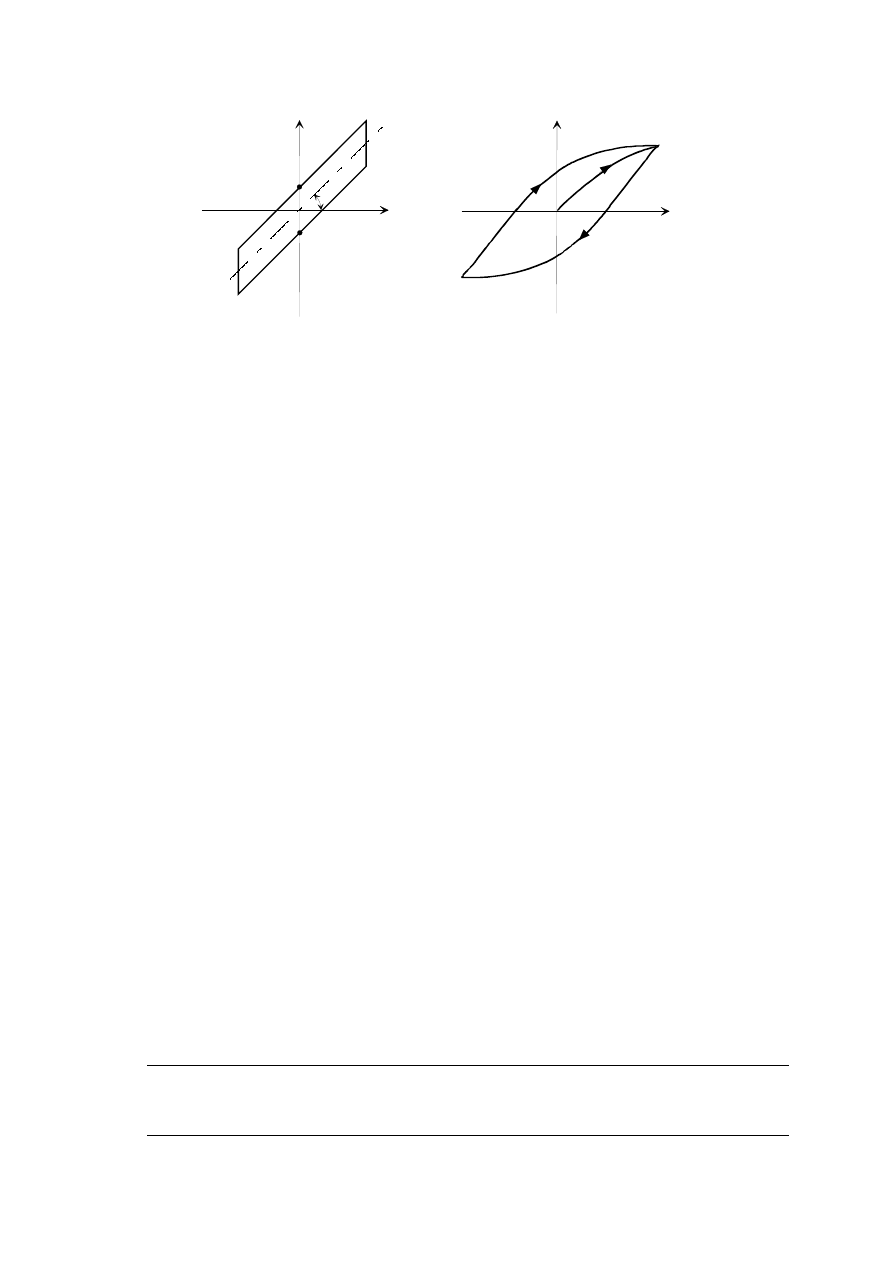
Odkształceniom elementów konstrukcji towarzyszy zjawisko tarcia na połączeniach
elementów. W rezultacie wykres siły w funkcji odkształcenia ma kształt podobny do
przedstawionych na rys.2.47a,b.
77
a)
T
-T
x
P
α
kx
P
x
b)
k
tg
=
α
Rys.2.47
Wykres siły z rys 2.47(a) odpowiada wzorowi
P
kx T
x
=
+ sgn &,
(2.95)
natomiast pętla histerezy z rys. 2.47(b) przypomina pętlę histerezy dla materiałów
lepkosprężystych i w konsekwencji siła może być też podobnie modelowana, tzn.
(
)
P
k i x
=
+ η
(2.96)
Jak widzimy modelowanie elementów układów mechanicznych i zjawisk z ich
udziałem nie jest sprawą łatwą. Temat modelowania sił tłumiących w połączeniach jest
niezwykle obszerny. Droga, do adekwatnego modelowania wiedzie przez zrozumienie
natury drgań układów o wielu stopniach swobody, drgań układów ciągłych,
rozpoznanie własności materiałów konstrukcyjnych, wreszcie przez ich pomiar
i identyfikację.
ROZDZIAŁ
TRZECI
78
DRGANIA UKŁADÓW LINIOWYCH O JEDNYM STOPNIU
SWOBODY
Celem niniejszego
rozdziału jest poznanie własności układu drgającego liniowego
o stałych parametrach mechanicznych i jednym stopniu swobody, a w szczególności
jego odpowiedzi na najprostsze rodzaje wymuszeń.
3.1 DRGANIA SWOBODNE
3.1.1 Drgania swobodne układu bez tłumienia
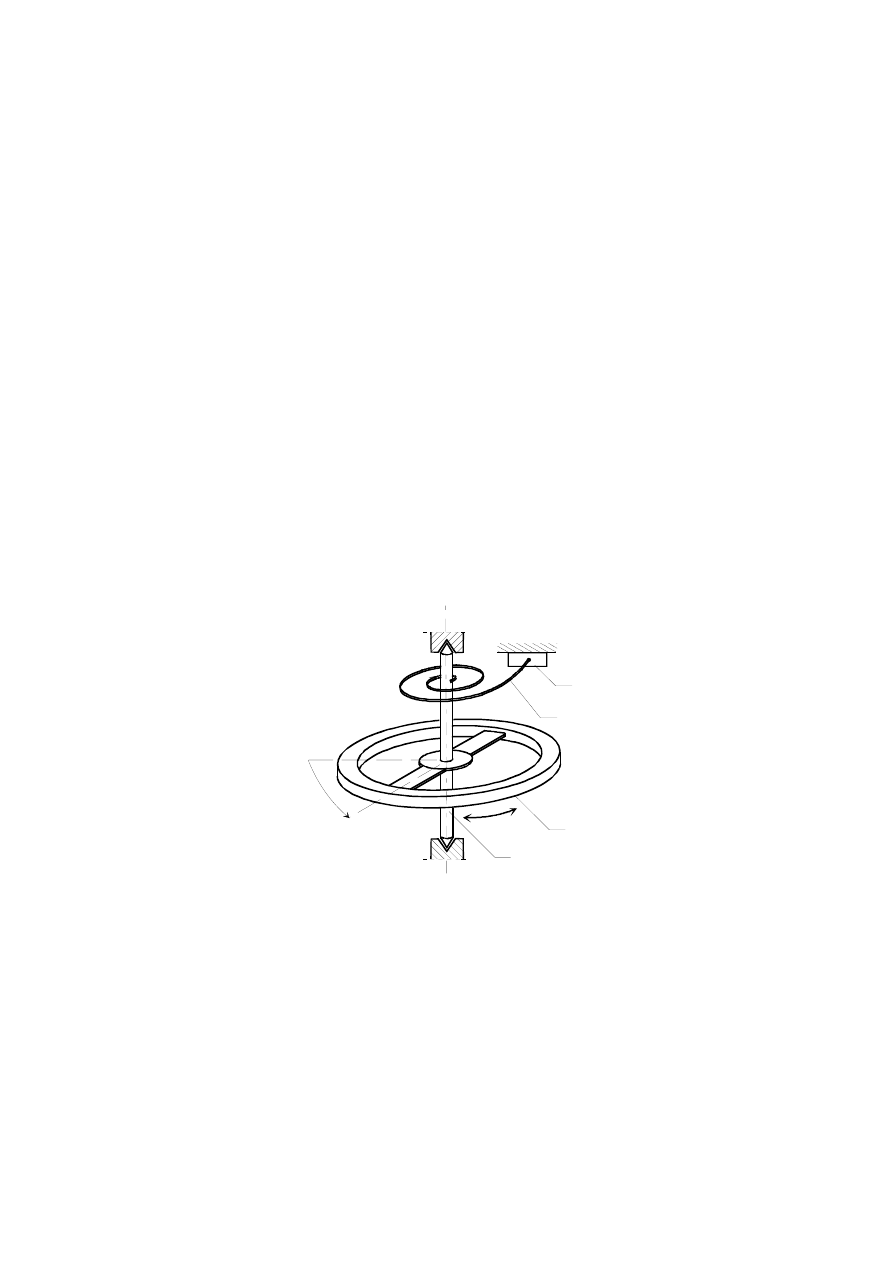
Z drganiami tego rodzaju spotkaliśmy się już w p.1.2 rozważając oscylator
harmoniczny. Teraz przypomnimy najważniejsze rezultaty tego punktu na przykładzie
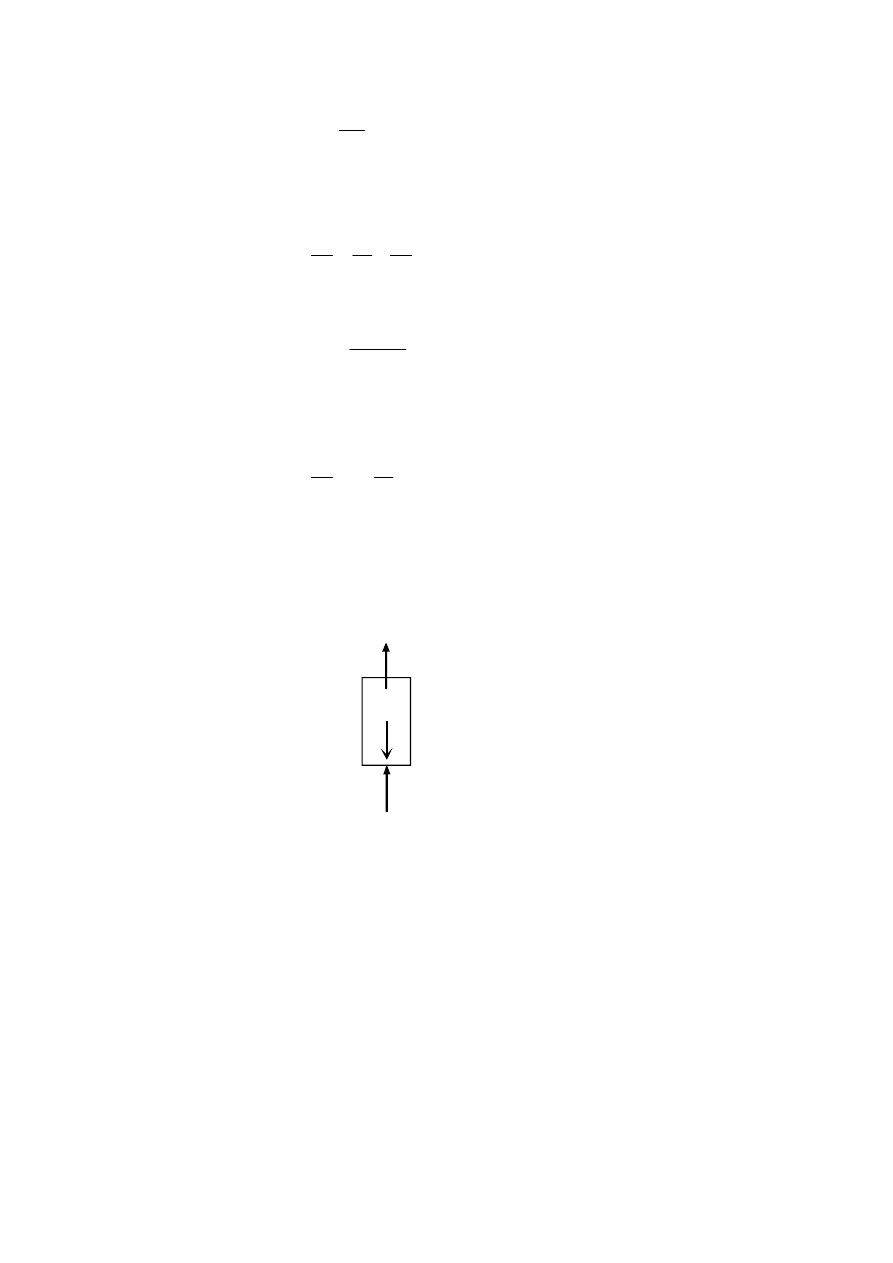
drgań skrętnych zespołu balansu zegarowego, którego schemat przedstawiony jest na
rys.3.1. Balans (1) jest tak ukształtowany, aby jego osiowy moment bezwładności I był
jak największy przy możliwie małej masie. Sprężyna zwrotna (3) o stałej K ma zwykle
kształt spirali Archimedesa i jej wewnętrzny koniec przytwierdzony jest do wałka
balansu (2), a zewnętrzny - do korpusu mechanizmu (4).
3
2
1
θ
4
Rys.3.1
Standardowa procedura uwalniania od więzów wraz z wykorzystaniem twierdzenia
o zmianie krętu pozwala na napisanie równania ruchu balansu w postaci
I
K
&&θ
θ
+
= 0
(3.1)
79
gdzie
θ
jest kątem wychylenia balansu z położenia równowagi. Równanie różniczkowe
(3.1) jest podobne do równania (1.1), zatem jego rozwiązanie jest analogiczne do
(1.17), czyli
( )
(
)
α
+
ω
Θ
=
θ
t
sin
t
0
(3.2)
gdzie amplituda
Θ
i faza drgań
α
zależą od warunków początkowych, tj. θ
0
i &
θ
0
, zaś
ω
0
= (K/I)
1/2
jest częstością drgań swobodnych nietłumionych, czyli krótko częstością
własną.
Kończąc ten punkt przypomnijmy, że rozważona przez nas sytuacja drgań układu
bez tłumienia jest tylko idealizacją, która w rzeczywistości - na poziomie układów
technicznych - nie występuje. Wyłania się więc pytanie: czy warto mówić o częstości
własnej układu technicznego, a więc z definicji obdarzonego tłumieniem? Owszem, tak
i to z dwu powodów:
1. zdarzyć się może, niekiedy celowo, niekiedy przypadkowo, że siły wymuszające
zewnętrzne całkowicie „neutralizują” wpływ tłumienia danego układu i wtedy
drgania układu rzeczywistego zachowują wszelkie własności układu
modelowego nietłumionego;
2. częstość własna jest najbardziej syntetyczną wielkością reprezentującą dowolny
układ drgający (a więc też tłumiony wewnętrznie), jest niejako jego wizytówką,
a nawet podstawowym identyfikatorem, takim jakim dla człowieka są jego linie
papilarne. Częstość własna jest ważnym punktem odniesienia, jest wielkością,
którą można wyznaczyć lub pomierzyć, od niej, w dużym stopniu, zależy
przebieg zjawisk drganiowych realizowanych w danym układzie przy różnych
wymuszeniach. Dlatego warto ją znać.
Zauważmy więc, że w konsekwencji pojęcie częstość własna dotyczy przede
wszystkim modeli, ale może dotyczyć układów rzeczywistych jako ich syntetyczny
reprezentant.
3.1.2 Drgania swobodne układu z tłumieniem
80
Podobnie jak w p. 1.2 rozważać będziemy ruch postępowy i prostoliniowy ciała o masie
m
po idealnie gładkiej płaszczyźnie (rys.3.2). Teraz, oprócz liniowej sprężyny o
sztywności k, do masy dołączony jest tłumik liniowy, którego własności tłumienne
charakteryzuje tzw. współczynnik tłumienia lepkiego (lub inaczej wiskotycznego) c
[kg/s].
m
x
k
c
Rys. 3.2
Równanie ruchu ciała ma postać
mx cx kx
&&
&
+
+
= 0
(3.3)
Dla ułatwienia dalszej analizy równanie (3.3) zapiszemy następująco
&&
&
x
hx
x
+
+
=
2
0
0
2
ω
(3.4)
gdzie
ω
0
2
= k/m, a znormalizowany współczynnik tłumienia 2h wyraża się wzorem
2h
c
m
=
(3.5)
Równanie charakterystyczne dla równania różniczkowego (3.4) ma postać
r
hr
2
0
2
2
0
+
+
=
ω
(3.6)
zaś jego pierwiastki są następujące
r
h
h
1
2
0
2
= − −
− ω , r
h
h
2
2
0
2
= − +
− ω
(3.7)
Rozwiązanie ogólne równania (3.4) jest zatem kombinacją liniową rozwiązań
szczególnych, tj.
( )
x t
C e
C e
r t
r t
=
+
1
2
1
2
(3.8)
gdzie C
1
i C
2
są stałymi dowolnymi.
W
zależności od znaku wyrażenia h
2
0
2
−
ω
we wzorach (3.7) wyróżniamy trzy
przypadki:
1) h >
ω
0
2) h = ω
0
,
3) h <
ω
0
Tłumienie wiskotyczne c, przy którym h =
ω
0
nazywamy tłumieniem krytycznym, tzn.
81
c
kr
= 2m
ω
0
(3.9)
Zdefiniujmy także tzw. względny współczynnik tłumienia zwany też stopniem tłumienia
jako
γ = c c
kr
/
(3.10)
Przy jego użyciu równanie ruchu (3.4) i pierwiastki (3.7) można zapisać w postaci
&&
&
x
x
x
+
+
=
2
0
0
0
2
γω
ω
(3.11)
(
)
r
1
2
0
1
= − −
−
γ
γ
ω
,
(
)
r
2
2
0
1
= − +
−
γ
γ
ω .
(3.12)
Dla przekształcenia (3.4) w (3.11), a (3.7) w (3.12) wystarczy wykazać, że
h c m c
m
c c
kr
=
=
=
=
2
2
0
0
0
0
ω
ω
ω
γω
(
)
(3.13)
Rozważmy szczegółowo każdy z trzech przypadków.
1. Tłumienie nadkrytyczne h >
ω
0
, czyli
γ
> 1.
W tym przypadku pierwiastki (3.12) równania charakterystycznego (3.6) są różne i
ujemne, zaś rozwiązanie x(t) dane jest wzorem (3.8). Stałe C
1
, C
2
wyznaczamy z
układu równań:
x
C
C
0
1
2
=
+
, v
r C
r C
0
1 1
2
2
=
+
(3.14)
gdzie x
0
, v
0
są odpowiednio wychyleniem i prędkością początkową. Z (3.14) mamy
C
x r
v
r
r
1
0 2
0
2
1
=
−
−
, C
v
r x
r
r
2
0
1 0
2
1
=
−
−
(3.15)
Wychylenie x(t) wyraża się więc zależnością
( )
(
)
(
)
[
]
x t
r
r
x r
v e
v
r x e
r t
r t
=
−
−
+
−
1
2
1
0 2
0
0
1 0
1
2
(3.16)
Rozwiązanie (3.16) jest sumą dwu funkcji wykładniczych o wykładnikach
rzeczywistych i ujemnych. Zatem ruch układu nie jest drgający, lecz asymptotycznie
zanikający, tzn. dla t
→ ∞ x(t) → 0. Więcej o charakterze ruchu w warunkach tłumienia
nadkrytycznego dowiemy się wyznaczając chwilę t
m
, w której wychylenie jest
ekstremalne. Wiadomo, że ekstremum wychylenia zachodzi wtedy, gdy prędkość
x&
(t)
jest równa zero. Po zróżniczkowaniu (3.8) i wykorzystaniu warunku
x&
(t
m
) = 0,
otrzymujemy:
r
1
C
1
exp(r
1
t
m
) + r
2
C
2
exp(r
2
t
m
) = 0, czyli exp(r
1
- r
2
)t
m
= - r
2
C
2
/
r
1
C
1
, a stąd
(
)
t
r
r
r C r C
m
=
−
−
1
1
2
2
2
1
1
ln
(3.17)
Dla stałych C
1
i C
2
(wzory (3.15)) ekstremalne wychylenie zachodzi w chwili
82
(
)
(
)
t
r
r
r v
r x
r v
r x
m
=
−
−
−
⎡
⎣
⎢
⎢
⎤
⎦
⎥
⎥
1
1
2
2
0
1 0
1
0
2 0
ln
(3.18)
Czas t
m
jest określony pod warunkiem, że wyrażenie w nawiasie kwadratowym jest
dodatnie. Jeśli wyrażenie podlogarytmiczne jest niedodatnie, to oznacza, że funkcja x(t)
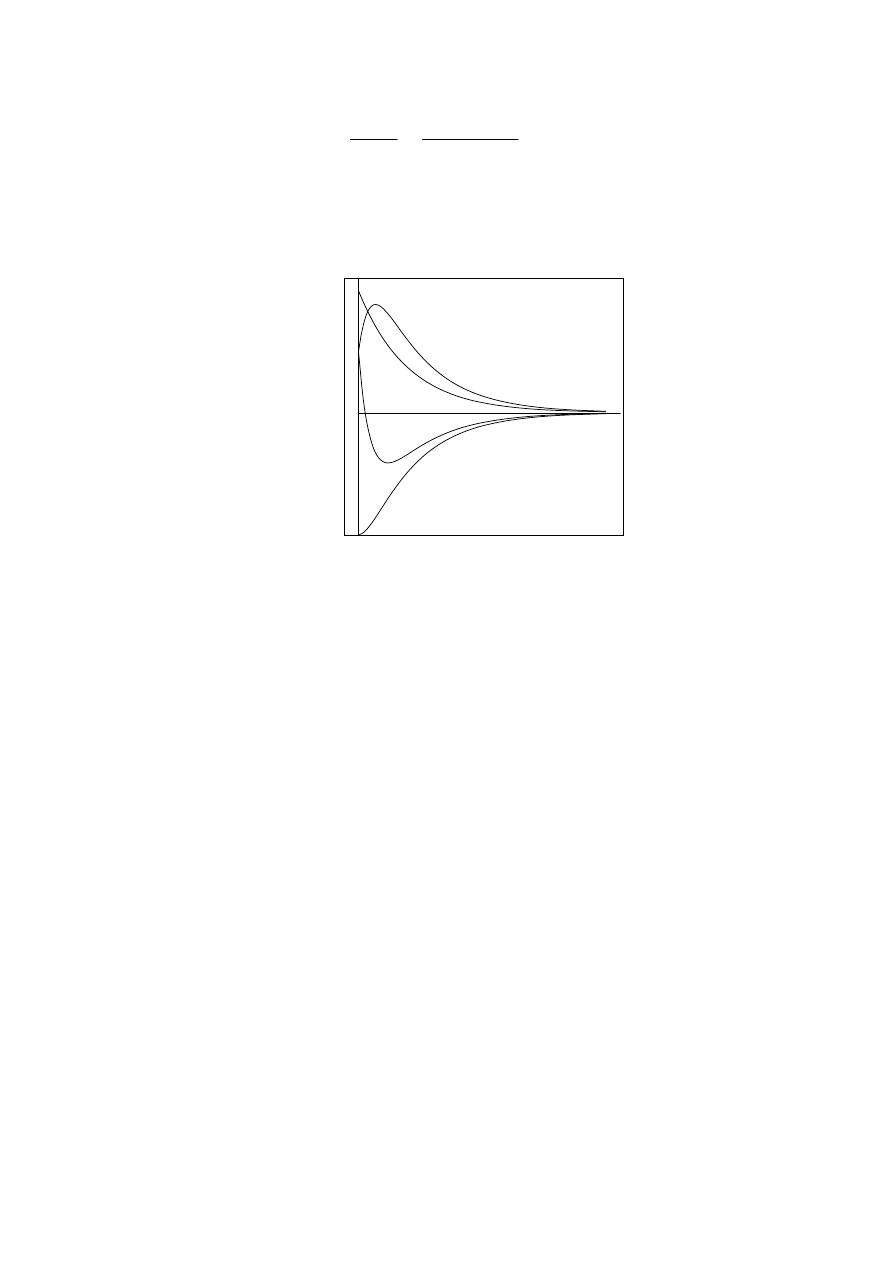
nie posiada ekstremum. Jej przebieg jest więc taki jak np. krzywej 1 na rys 3.3.
Rys. 3.3
Jeśli warunki początkowe mają postać x(0) = x
0
,
v(0) = 0, to iloraz pod znakiem
logarytmu w (3.18) przybiera wartość 1. Ponieważ ln1 = 0, więc t
m
= 0, co oznacza, że
ekstremalne wychyle-nie zachodzi tylko w chwili t = 0. Tę sytuację przedstawia krzywa
2 na rys 3.3.
Krzywe 3 i 4 przedstawiają dwie sytuacje, w których czas t
m
> 0. Warto ponadto
zauważyć, że:
- bez względu na warunki początkowe ciało co najwyżej raz przechodzi przez
położenie x = 0,
- jeśli w trakcie ruchu ciało osiągnie chwilową prędkość zero, to potem zmierza
asymptotycznie
do położenia równowagi
2. Tłumienie krytyczne h =
ω
0
, czyli
γ = 1.
W tym przypadku pierwiastki (3.7) przekształcają się w jeden pierwiastek podwójny,
tzn.
r
1
= r
2
= -h = -
ω
0
(3.19)
Rozwiązanie przybiera wówczas postać:
( )
(
)
x t
e
C
C t
t
=
+
−ω
0
1
2
,
(3.20)
3
1
2
4
t
x
83
gdzie stałe C
1
,
C
2
są wyznaczane na podstawie warunków początkowych. W celu
wyznaczenia tych stałych różniczkujemy (3.20). Mamy
( )
(
)
[
]
&x t
C
C
C t e
t
=
−
+
−
2
0
1
2
0
ω
ω
(3.21)
Na podstawie (3.20) i (3.21) otrzymujemy
x
0
= C
1
oraz
v
0
= C
2
-
ω
0
C
1
, czyli
C
1
= x
0
, C
2
= v
0
+
ω
0
x
0
(3.22)
Ruch jest zatem opisany zależnością
( )
(
)
[
]
x t
x
v
x t e
t
=
+
+
−
0
0
0 0
0
ω
ω
(3.23)
Rozwiązanie to jest iloczynem funkcji liniowej i wykładniczo malejącej funkcji czasu.
Zależy ono od warunków początkowych, ale jego podstawowe cechy są takie same jak
rozwiązania (3.16) dla tłumienia nadkrytycznego. W rozważanym przypadku łatwo
wyznaczyć chwilę t
m
, w której wychylenie
x(t) jest ekstremalne. Na podstawie (3.21)
mamy
(
)
C
C
C t
m
2
0
1
2
0
−
+
=
ω
skąd
t
m
= (C
2
-
ω
0
C
1
)/
ω
0
C
2
. Po podstawieniu wartości stałych
C
1
,
C
2
z (3.22)
otrzymujemy
(
)
t
v
v
x
m
=
+
0
0
0
0 0
ω
ω
(3.24)
3.
Tłumienie podkrytyczne h <
ω
0
, czyli
γ < 1.
W tym przypadku pierwiastki są liczbami zespolonymi, sprzężonymi, tj.
r
1
= - h - i
ω
D
,
r
2
= - h + i
ω
D
(3.25)
gdzie
ω
ω
ω
γ
D
h
=
−
=
−
0
2
2
0
2
1
(3.26)
jest tzw.
częstością drgań swobodnych tłumionych, zwaną krótko częstością naturalną.
Rozwiązanie (3.8) przybiera postać:
( )
(
)
x t
e
C
t C
t
ht
D
D
=
+
−
1
2
cos
sin
ω
ω
(3.27)
Dla warunków początkowych
x(0) = x
0
,
v(0) = v
0
stałe
C
1
,
C
2
są następujące
C
1
= x
0
, C
2
= (v
0
+ hx
0
)/
ω
D
(3.28)
Po zamianie stałych (zob. p.1.2) rozwiązanie (3.27) można zapisać w postaci:
( )
(
)
x t
Ae
t
ht
D
=
+
−
sin
ω
α
(3.29)
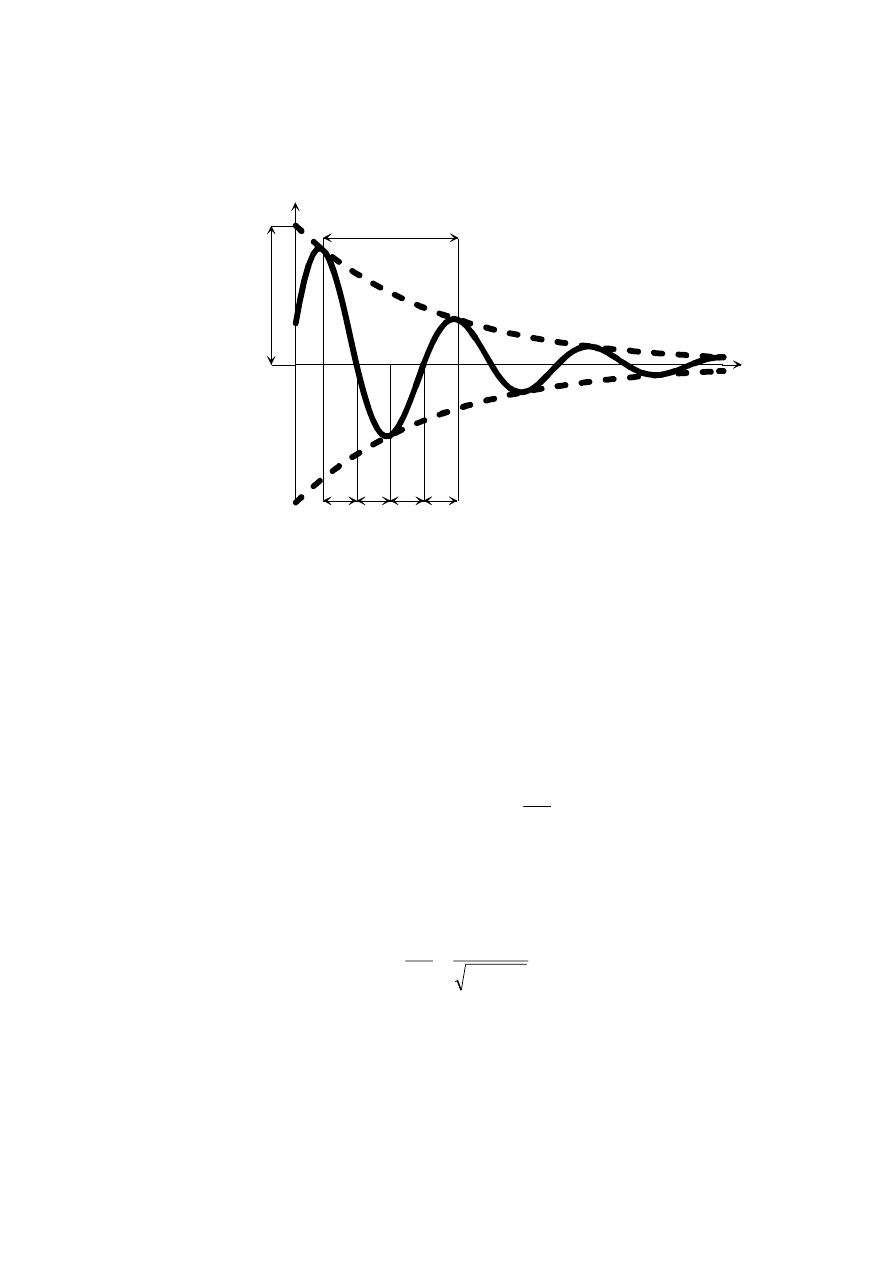
84
gdzie stałe A - amplituda początkowa i
α
- kąt przesunięcia fazowego są wyznaczane z
wa-runków początkowych. Ruch opisany zależnością (3.29) przedstawiony jest na rys.
3.4
x
Ae
-ht
T
D
/4
T
D
/4
T
D
/4
T
D
/4
A
T
D
t
Rys. 3.4
Drgania tłumione nie są okresowe, gdyż nie istnieje taka stała czasowa
τ
, dla
której
x(t +
τ)
=
x(t). Można jednak wprowadzić wielkość T
D
, zwaną okresem
umownym, którą definiujemy jako odstęp czasu, między dwoma kolejnymi
maksymalnymi wychyleniami w tę samą stronę. Dla ustalenia zależności między T
D
a
innymi parametrami układu zbadajmy ekstrema funkcji (3.29). W tym celu
przyrównajmy do zera pochodną funkcji (3.29), czyli
( )
(
)
(
)
&
sin
cos
x t
Ahe
t
A
e
t
ht
D
D
ht
D
= −
+
+
+
=
−
−
ω
α
ω
ω
α
0
a stąd
(
)
tg
t
h
D
D
ω
α
ω
+
=
Wzór ten wyznacza wartości t, dla których funkcja (3.29) ma ekstrema. Jeśli jednak
ekstremum występuje dla t = t
1
, to występuje ono również dla
t
2
=
t
1
+
n
π
/
ω
D
.
Dla
n = 1 mamy więc t
2
-
t
1
= 0.5
T
D
=
π
/
ω
D
, a stąd
T
h
D
D
=
=
−
2
2
0
2
2
π
ω
π
ω
`
(3.30)
Jest widoczne, że wartość T
D
nie zmienia się wraz z upływem czasu, tzn. kolejne
skrajne wychylenia występują po tym samym czasie T
D
. Porównując wzory (3.30) i
(1.19) widzimy, że T
D
>
T, tzn. umowny okres drgań tłumionych jest większy od okresu
drgań nietłumionych.
3.1.3 Dekrement drgań
85
Dla ruchu swobodnego układu tłumionego danego wzorem (3.29) rozważmy iloraz
wychylenia w danej chwili i wychylenia po czasie T
D
od chwili danej, czyli
( )
(
)
q
x t
x t T
e
D
hT
D
=
+
=
Widzimy, że iloraz ten nie zależy od czasu t. Skoro jest to wielkość niezależna od czasu
t
można ją traktować jako dobrą miarę zanikania drgań. Definiujemy więc wielkość
( )
(
)
δ
π
ω
=
+
=
=
−
ln
x t
x t T
hT
h
h
D
D
2
0
2
2
(3.31)
którą nazywamy logarytmicznym dekrementem drgań lub krótko dekrementem drgań.
Wielkość ta stosowana jest jako miara tłumienia drgań, przy użyciu której szczególnie
prosto dają się wyrazić zmiany zachodzące w układzie tłumionym.
Biorąc pod uwagę wzory (3.13) i (3.26), dekrement drgań może być przedstawiony jako
δ
πγ
γ
=
−
2
1
2
(
3.32)
Jeśli
γ
<< 1 (co jest typowe dla licznych materiałów i zespołów mechanicznych), to
wówczas dekrement przybiera szczególnie prostą postać
δ
πγ
= 2
(3.33
)
Istnieje jeszcze jedna miara tłumienia drgań stosowana bardzo często w lotnictwie. Jest
to czas stłumienia amplitudy do połowy T
1/
2
. Tę wartość wyznaczymy wykorzystując
warunek
( )
(
)
x t
x t T
e
hT
+
=
=
1 2
1 2
2
/
/
Zatem po uwzględnieniu wzoru (3.5)
T
h
m
c
1 2
2
2
2
/
ln
ln
=
=
(3.34)
3.1.4 Straty energii podczas drgań tłumionych
Rozważmy straty energetyczne w układzie spowodowane tłumieniem. Uczynimy to
zakładając, że tłumienie jest małe. O ilości rozproszonej energii można wnosić na
podstawie maksymalnych wychyleń od położenia równowagi w kolejnych fazach
drgań. W warunkach maksymalnego wychylenia, energia potencjalna jest równa
całkowitej energii układu, bowiem wówczas prędkość równa jest zeru. Wyznaczmy
zatem najpierw względną zmianę energii miedzy kolejnymi maksymalnymi
wychyleniami o wartościach odpowiednio x
i
oraz
x
i+1
. Przez
U
i
oraz
U
i+1
oznaczmy
86
energie zmagazynowane w układzie w tych szczególnych chwilach. Wówczas
całkowita energia równa jest energii potencjalnej, czyli
U
kx
i
i
=
1
2
2
oraz
U
kx
i
i
+
+
=
1
1
2
1
2
Strata energii
Δ
U w pełnym cyklu miedzy kolejnymi maksimami wynosi
(
)
(
)(
)
1
1
2
1
2
1
2
2
1
1
+
+
+
+
−
+
=
−
=
−
=
Δ
i
i
i
i
i
i
i
i
x
x
x
x
k
x
x
k
U
U
U
(3.35
)
Policzmy względną stratę energii
Δ
U/U
i
wykorzystując przy tym definicję dekrementu
drgań (3.31) oraz wzór (3.35). Mamy
(
)(
)
(
)(
)
ΔU
U
k x
x
x
x
kx
x
x
x
x
e
e
e
i
i
i
i
i
i
i
i
i
i
=
+
−
=
+
⎛
⎝
⎜
⎞
⎠
⎟ −
⎛
⎝
⎜
⎞
⎠
⎟ = +
−
= −
+
+
+
+
−
−
−
0 5
0 5
1
1
1
1
1
1
1
2
1
1
2
.
.
δ
δ
δ
(3.36
)
Wyznaczymy teraz energię rozproszoną w pojedynczym cyklu zakładając przy
tym, że w przybliżeniu, w tym czasie ruch jest harmoniczny, tj. x = Asin
ω
t, gdzie A jest
amplitudą wyróżnionego cyklu. Strata energii w pierwszej ćwiartce cyklu (na drodze od
0 do A) równa jest w przybliżeniu jednej czwartej strat energii w całym cyklu. Mamy
więc
∫
=
Δ
A
dx
x
c
U
0
4
&
(3.37
)
gdzie &
cos .
x
A
t
=
ω
ω
Ponieważ &
/
,
x
dx dt
=
więc dx
xdt
= & , to całkę (3.37) można
zapisać jako
ΔU
cx dt
cA
tdt
c A
=
=
=
∫
∫
4
4
2
0
2
2
0
2
2
2
2
&
cos
/
/
π ω
π ω
ω
ω
π ω
(3.38
)
Zależność (3.38) może posłużyć do wyznaczania zastępczego współczynnika tłumienia
dla elementów o nieliniowej charakterystyce tłumiennej.
3.2 DRGANIA WYMUSZONE SIŁĄ HARMONICZNĄ
87
3.2.1 Drgania wymuszone układu bez tłumienia
Rozważmy układ drgający nietłumiony (rys.1.1) pod działaniem siły
F(t) = F
0
sin
ωt
skierowanej wzdłuż osi
x. Ruch masy opisany jest wówczas równaniem różniczkowym
niejednorodnym
t
sin
F
kx
x
m
ω
=
+
0
&&
(3.39)
Rozwiązanie równania (3.39) jest sumą rozwiązania x
s
równania jednorodnego
(drgań
swobodnych) i rozwiązania szczególnego
x
w
równania niejednorodnego (tj. drgań
wymuszonych), tzn.
x = x
s
+ x
w
(3.40)
Do wyznaczenia rozwiązania szczególnego
x
w
posłużymy się procedurą standardową -
w tym wypadku, ze względu na postać prawej strony równania (3.39), zastosujemy tzw.
metodę przewidywania. Poszukujemy zatem tego rozwiązania w postaci
x
w
= A
1
sin
ωt + A
2
cos
ωt
(3.41)
Rozwiązanie (3.41) i jego drugą pochodną
&&
sin
cos
x
A
t
A
t
x
w
w
= −
−
= −
ω
ω ω
ω
ω
2
1
2
2
2
(3.42)
podstawiamy do (3.39), grupujemy wyrazy przy funkcjach sin
ω
t i cos
ω
t i otrzymujemy
(
)
(
)
t
sin
F
t
cos
m
k
A
t
sin
m
k
A
ω
=
ω
ω
−
+
ω
ω
−
0
2
2
2
1
(3.43)
Skoro x
w
dane wzorem (3.41) ma być rozwiązaniem równania (3.39), to (3.43) musi
być tożsamością. A zatem współczynniki stojące przy liniowo niezależnych funkcjach
sin
ω
t i cos
ω
t po obu stronach (3.43) muszą być sobie równe. Z tego warunku wynika,
że
A
2
= 0 oraz
)
(
2
0
1
ω
m
k
F
A
−
=
. Skoro
A
2
= 0, to amplituda
A drgań równa jest stałej
A
1
. Mamy zatem
t
sin
m
k
F
t
sin
A
x
w
ω
ω
−
=
ω
=
2
0
(3.44)
Przedstawione rozwiązanie jest ważne pod warunkiem, że k
≠ m
ω
2
, co oznacza,
że
ω
≠
ω
0
.
Dla siły wymuszającej o częstości
ω
rozwiązanie
x
w
(3.44) jest ruchem
harmonicznym o tej samej częstości i są to tzw.
drgania ustalone. Amplitudę drgań
ustalonych (3.44) można zapisać na kilka różnych sposobów.
Mianowicie
88
(
)
2
2
0
0
2
0
m
F
m
k
m
F
A
ω
−
ω
=
⎟
⎠
⎞
⎜
⎝
⎛
ω
−
=
2
st
2
0
2
0
2
0
1
A
1
k
F
k
m
1
k
F
ν
−
=
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
ω
ω
−
=
⎟
⎠
⎞
⎜
⎝
⎛
ω
−
=
(3.45)
gdzie ostatni ułamek wyrażony został za pomocą ilorazu częstości
ν = ω/ω
0
oraz
wydłużenia statycznego sprężyny
A
st
pod działaniem siły F
0
. Zachodzi bowiem związek
A
st
= F
0
/k .
Amplituda drgań A może być wyrażona także jako:
A
A
st
=
β
(3.46)
gdzie
2
1
1
ν
−
=
β
(3.47)
jest współczynnikiem zwielokrotnienia amplitudy zwanym także współczynnikiem
wzmocnienia dynamicznego
. Jego wartość,
a w konsekwencji amplituda drgań
ustalonych (3.46), zależy od ilorazu częstości
ν.
Dla
ν
<< 1,
β
≈ 1, dla
ν
= 1,
β
dąży do nieskończoności, zaś dla
ν
>>1,
β
dąży do zera.
Współczynnik
β
jest dodatni, gdy
ω
<
ω
0
, a ujemny gdy
ω
>
ω
0
. Oznacza to, że
wychylenie x
w
jest tego samego znaku co siła F(t), gdy
ω
<
ω
0
, zaś przeciwnego,
gdy
ω
>
ω
0
. Innymi słowy częstość drgań własnych
ω
0
jest granicą zmiany fazy
wychylenia względem siły wymuszającej. Dla
ω
<
ω
0
wychylenie jest w fazie z siłą, zaś
powyżej przesunięcie fazy jest
π
. Rys. 3.5 przedstawia zależność wartości
bezwzględnej
współczynnika
β
od ilorazu częstości
ω
/
ω
0
.
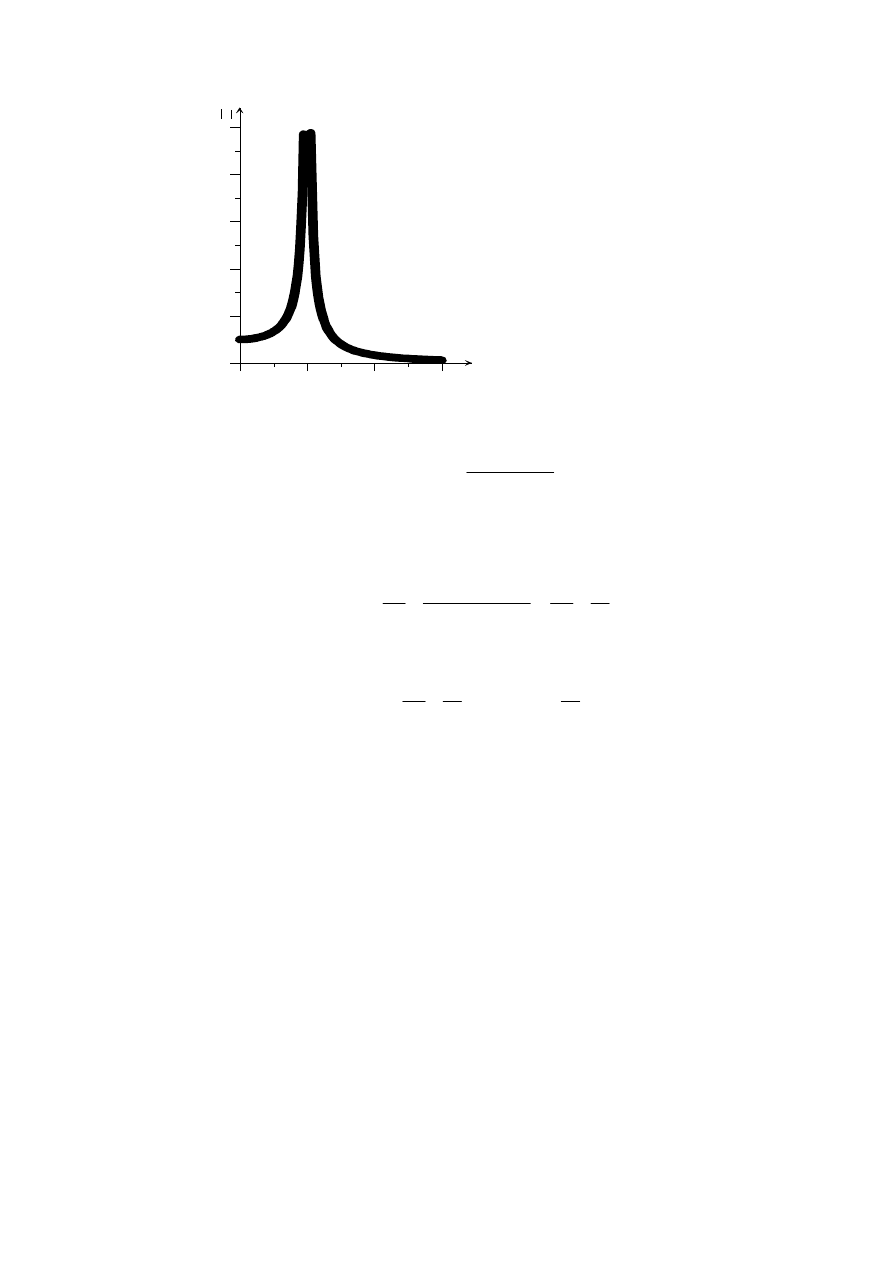
89
0 .0 0
1 .0 0
2 .0 0
3 .0 0
0 .0 0
2 .0 0
4 .0 0
6 .0 0
8 .0 0
1 0 .0 0
β
ω /ω
0
R y s .3 .5
Rys.3.5
Pełne rozwiązanie równania (3.40) ma postać
)
(
m
t
sin
F
t
sin
C
t
cos
C
x
2
2
0
0
0
2
0
1
ω
−
ω
ω
+
ω
+
ω
=
(3.48)
Stałe C
1
i C
2
wyznaczamy na podstawie warunków początkowych. Dla najbardziej
ogólnego zestawu tych warunków, tj. x(0) = x
0
oraz
( )
&x
v
0
0
=
mamy
C
1
= x
0,
βν
−
ω
=
ω
−
ω
ω
ω
−
ω
=
k
F
v
)
(
m
F
v
C
0
0
0
2
2
0
0
0
0
0
2
(3.49)
a zatem pełne rozwiązanie można zapisać jako:
( )
t
sin
k
F
t
sin
k
F
v
t
cos
x
t
x
0
0
0
0
0
0
0
ω
β
+
ω
⎟⎟
⎠
⎞
⎜⎜
⎝
⎛
βν
−
ω
+
ω
=
(3.50)
Warto zwrócić uwagę, że odpowiedź układu nietłumionego na wymuszenie siłą
harmoniczną zawiera jeden nieco nieoczekiwany składnik. O ile bowiem składnik
pierwszy spowodowany jest wychyleniem początkowym x
0
, składnik drugi prędkością
masy v
0
, w chwili t = 0, składnik czwarty to odpowiedź ustalona na siłę F
0
sin
ω
t
, o tyle
nie tak łatwo podać przyczynę pojawienia się trzeciego składnika rozwiązania (3.50), tj.
-(F
0
/k)
β
νsin
ω
0
t
Otóż zauważmy, że składnik ten to drgania z częstością własną
ω
0
, których amplituda
jest proporcjonalna do amplitudy F
0
siły wymuszającej. Składnik ten występuje
niezależnie od warunków początkowych x
0
,
v
0
. Drgania te wzbudzane są tylko dlatego,
że na układ o częstości drgań własnych
ω
0
działa siła o innej częstości. Działanie tej
siły jakby zaburza naturalny stan dynamiczny układu, tj. drgania z częstością
ω
0
i stad
pojawia się w odpowiedzi składnik, który jest „reakcją” na to zaburzenie.
3.2.2 Drgania wymuszone układu z tłumieniem

90
Rozważmy teraz drgania wymuszone siłą harmoniczną F(t) = F
0
sin
ω
t
działającą na
układ przedstawiony na rys. 3.6.
Fsin ω
m
k
c
0
t
X
Rys.3.6
Ruch tego układu opisany jest równaniem
,
t
sin
F
kx
x
c
x
m
ω
=
+
+
0
&
&&
(3.51)
które, po wprowadzeniu symbolu f
0
= F
0
/m i użyciu oznaczeń (1.6) i (3.5) można
zapisać jako
t
sin
f
x
x
h
x
ω
=
ω
+
+
0
2
0
2 &
&&
(3.52)
Rozwiązanie tego równania jest, tak jak w wypadku równania (3.39),
sumą (3.40). Tym razem mamy jednak do czynienia z układem tłumionym, zatem
składnik
x
s
(
t) rozwiązania jest funkcją zanikającą w czasie (zob. (3.27)). Składnik x
w
(
t)
reprezentujący drgania ustalone pod wpływem siły harmonicznej z czasem dominuje w
rozwiązaniu x(t), dlatego tylko ta część rozwiązania pozostanie przedmiotem dalszych
rozważań.
Jak zwykle postulujemy rozwiązania w postaci (3.41) tzn.
x
w
= A
1
sin
ω
t + A
2
cos
ω
t
W wyniku standardowej procedury dla równań różniczkowych niejednorodnych,
otrzymujemy:
0
2
1
2
2
0
f
A
h
2
A
)
(
=
ω
−
ω
−
ω
,
0
A
)
(
A
h
2
2
2
2
0
1
=
ω
−
ω
+
ω
(3.53)
z którego to układu wyznaczamy stałe A
1
i
A
2
:
2
2
2
2
2
0
2
2
0
0
1
h
4
)
(
)
(
f
A
ω
+
ω
−
ω
ω
−
ω
=
,
2
2
2
2
2
0
0
2
h
4
)
(
h
f
2
A
ω
+
ω
−
ω
ω
−
=
, (3.54)
a zatem rozwiązanie x
w
przybiera postać
[
]
t
cos
h
2
t
sin
)
(
h
4
)
(
f
x
2
2
0
2
2
2
2
2
0
0
w
ω
ω
−
ω
ω
−
ω
ω
+
ω
−
ω
=
(3.55)
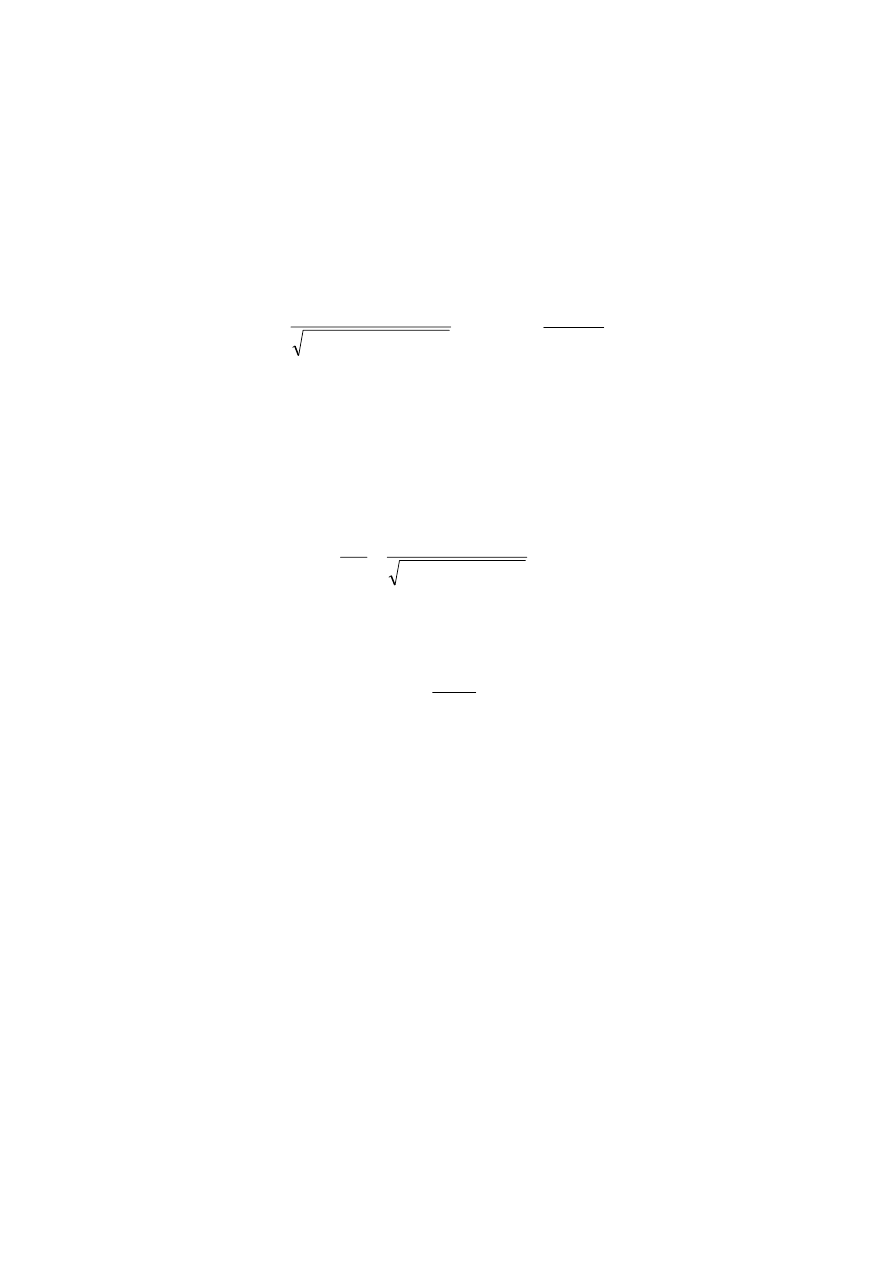
91
Znak minus poprzedzający składnik z kosinusem wskazuje, że przesunięcie fazy
odpowiedzi względem wymuszenia jest ujemne, dlatego z wykorzystaniem pomysłu
zastąpienia dwu stałych A
1
i
A
2
stałymi A i
ε
(zob.p.1.2), rozwiązanie (3.55) daje się
wyrazić w postaci
(
)
x
A
t
w
=
−
sin
ω
ε
(3.56)
gdzie
2
2
2
2
2
0
0
h
4
)
(
f
A
ω
+
ω
−
ω
=
,
2
2
0
h
2
tg
arc
ω
−
ω
ω
=
ε
(3.57a,b)
Zwracamy uwagę, że tym razem kąt fazowy oznaczyliśmy inną literą (
ε
) niż uprzednio
w p.1.2 (
α
) dla podkreślenia innej przyczyny tego przesunięcia w fazie.
Zazwyczaj więcej możemy powiedzieć o wpływie tłumienia, gdy operujemy
wielkościami względnymi. Podzielmy zatem (3.57a
) przez A
s
t
. Po niezbędnych
przekształceniach z wy-korzystaniem definicji (3.5), (3.10) i (3.46) otrzymujemy
β =
2
2
2
2
st
4
)
1
(
1
A
A
ν
γ
+
ν
−
=
(3.58)
Kąt przesunięcia fazowego jako funkcja wielkości względnych
γ
oraz ν wyraża się
wzorem
2
1
2
tg
arc
ν
−
γν
=
ε
(3.59)
Wzory (3.58) i (3.59) są podstawą dwu ważnych wykresów: 1) współczynnika
rezonansu
β
w funkcji ilorazu częstości
ν
(rys.3.7), 2) kąta przesunięcia fazy
ε
w
funkcji ilorazu częstości
ν
(rys.3.8). Oba wykresy podane są dla kilku wartości
względnego współczynnika tłumienia
γ
.
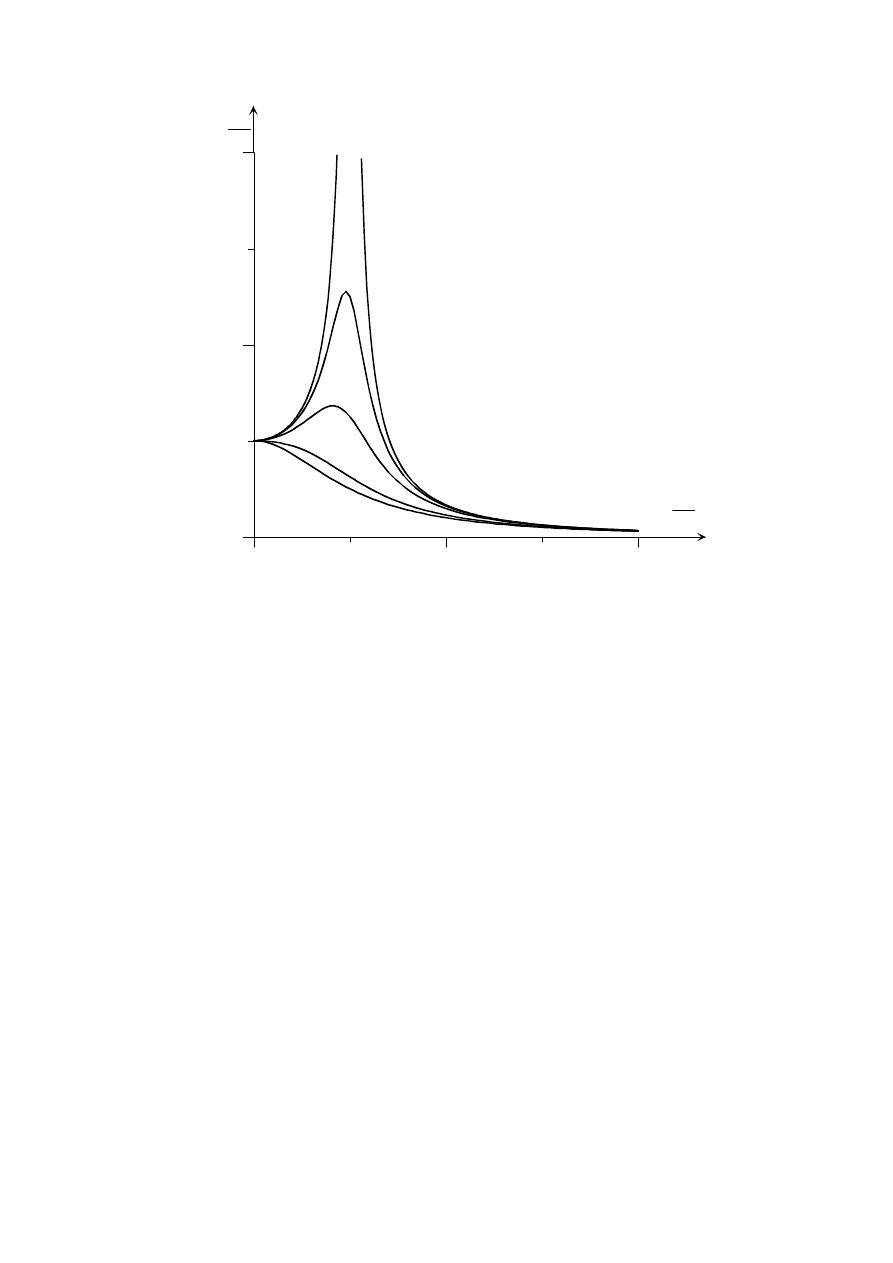
92
st
A
A
=
β
0.00
2.00
4.00
0.00
2.00
4.00
γ=0
γ=0.2
γ=0.4
γ=0.8
γ=1
0
ω
ω
=
ν
Rys. 3.7
Ze wzoru (3.57a) wynika, że gdy h
≠ 0, tzn. gdy występuje tłumienie,
amplituda
A tych drgań pozostaje zawsze skończona, niezależnie od częstości
ω
siły
wymuszającej. Jednak dla małych tłumień, w warunkach, gdy częstość ta jest bliska
częstości drgań własnych
ω
0
, amplituda drgań może wielokrotnie przewyższać ugięcie
statyczne
A
s
t
.
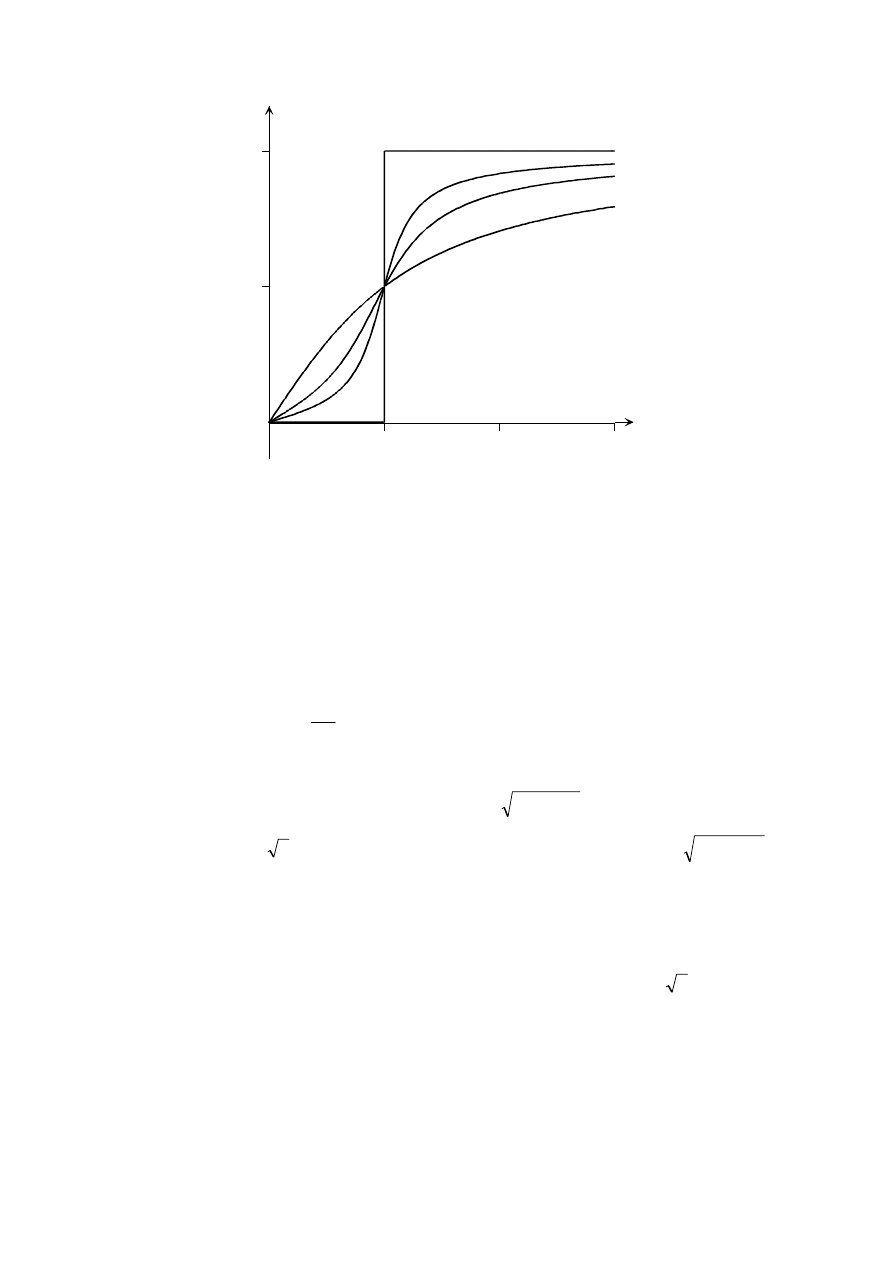
93
ε
ν
0
1
2
3
π
π/2
γ=0
γ=0.2
γ=0.4
γ=1
Rys. 3.8
Takie warunki pracy mogą być niepożądane, a nawet niebezpieczne dla
konstrukcji. Dlatego warto wiedzieć kiedy występuje maksimum amplitudy i jakie jest
jej zwielokrotnienie
β
w tym maksimum. Wyznaczmy więc ekstrema amplitudy
A
traktowanej jako funkcja częstości wymuszenia
ω
. Funkcja ta przybiera maksima, gdy
mianownik (3.57a) przybiera wartość minimalną. Zróżniczkujmy zatem wyrażenie
podpierwiastkowe ze wzoru (3.57a). Mamy
(
)
[
]
(
)
d
d
h
h
ω
ω
ω
ω
ω ω
ω
0
2
2 2
2
2
2
0
2
2
4
4
2
−
+
=
−
+
Pochodna ta jest równa zeru, gdy
ω = 0 oraz
2
2
0
h
2
−
ω
=
ω
(3.60)
Kiedy h
<
ω
0
2
/
, wówczas amplituda
A osiąga maksimum dla
ω
ω
=
−
0
2
2
2h , a
wiec dla częstości wymuszenia mniejszej od częstości drgań własnych. Tzw. pik
rezonansowy (maksimum amplitudy) pojawia się w pobliżu rezonansu dla małych
współczynników tłumienia, ale wraz ze wzrostem tłumienia coraz bardziej przesuwa się
w lewo, czyli w kierunku małych częstości wymuszenia, aż dla
h
≥ 2
0
ω
amplituda
osiąga maksimum dla
ω
= 0 i maleje wraz ze wzrostem częstości
ω
. Z tego powodu
maksimum amplitudy nie może być brane pod uwagę jako kryterium rezonansu, tj.
dostrojenia się częstości wymuszenia do częstości własnej.
94
Dla tłumień małych, tj. dla h <
ω
0
2
/
występuje jednostronne minimum lokalne
dla
ω
=
0. Wówczas A = A
st
. Ale nie oznacza to, że w tym punkcie wartość amplitudy
jest najmniejsza. Jak to widać z wykresu na rys. 3.7 dla dużych częstości
ω amplituda
zmierza do zera. Po podstawieniu
ω
ω
=
−
0
2
2
2h , czyli częstości odpowiadającej
maksimum, do (3.57a) otrzymujemy wzór na amplitudę maksymalną
2
2
0
0
max
h
hm
2
F
A
−
ω
=
(3.61)
Analogicznie, wyznaczając minimum mianownika wzoru (3.58), można określić
maksymalną wartość współczynnika wzmocnienia dynamicznego. Mamy
2
1
2
1
γ
−
γ
=
β
max
(3.62)
Zwróćmy jeszcze uwagę na prosty związek między współczynnikiem
β
a
stopniem tłumienia
γ
zachodzący w warunkach rezonansu, czyli dla
ν
= 1. Z (3.58)
mamy wówczas
β
γ
ν=
=
1
1
2
(3.63)
Zależność ta może być podstawą identyfikacji tłumienia układu drgającego.
Spójrzmy teraz na rys. 3.8. Widzimy, że bez względu na tłumienie dla
rezonansu, tj. gdy
ω
=
ω
0
, opóźnienie fazy wychylenia
x względem siły F(t) jest
π
/2.
Wynika stąd, że przesunięcie fazy jest dobrym kryterium dla doświadczalnego
wyznaczenia rezonansu.
3.2.3 Rezonans i dudnienie
Rezonans. W zakończeniu p.1.2 poznaliśmy pojęcie rezonansu jako zjawiska
zwielokrotnienia amplitudy drgań wymuszonych oscylatora pozbawionego tłumienia
pod działaniem siły okresowej o częstości równej częstości własnej oscylatora. Takie
pojmowanie rezonansu, jakkolwiek precyzyjne, jest zbyt wąskie. W żargonie
technicznym jak i w literaturze przedmiotu spotykamy szersze, ale też nieco rozmyte
pojmowanie rezonansu. Otóż rezonansem nazywamy zjawisko wzmocnienia amplitudy
drgań wymuszonych w stanie ustalonym dowolnych układów rzeczywistych (a więc z
tłumieniem i o dowolnej liczbie stopni swobody), co ma miejsce wtedy, gdy częstość
wymuszenia jest dostatecznie bliska częstości własnej układu.

95
W
układach modelowych (pozbawionych tłumienia) przy częstości wymuszenia
ω
=
ω
0
, amplituda rośnie do nieskończoności, w układach z tłumieniem amplituda
pozostaje skończona i jest tym mniejsza im większe jest tłumienie układu.
Dysponując wzorem (3.60) lub choćby wykresem z rys.3.7 łatwo zauważyć, że
maksimum amplitudy w układach tłumionych przypada dla częstości mniejszych od
częstości własnej. Jeśli więc częstość rezonansową zdefiniujemy jako odpowiadającą
maksimum amplitudy drgań wymuszonych, to dla układów rzeczywistych (czyli z
tłumieniem) jest ona mniejsza od częstości własnej i zmienia się w zależności od
stopnia tłumienia układu. Widzimy więc, że przy takim pojmowaniu pojęcia rezonans
zatraca ono swą precyzję.
Jak wygląda zjawisko narastania drgań w warunkach rezonansu? Sprawę tę
wyjaśnimy dla modelu bez tłumienia. Zauważmy najpierw, że nie możemy posłużyć się
rozwiązaniem (3.44), bo w warunkach rezonansu,
czyli dla
ω
=
ω
0
, traci ono ważność.
Zgodnie z teorią równań różniczkowych zwyczajnych rozwiązania poszukujemy wtedy
w postaci:
x
At
t
w
=
cos
ω
0
(3.64)
Po podstawieniu (3.64) do równania (3.39) otrzymujemy
t
sin
F
t
cos
kAt
t
cos
Amt
t
sin
Am
0
0
0
0
2
0
0
0
2
ω
=
ω
+
ω
ω
−
ω
ω
−
skąd po uwzględnieniu, że m
ω
0
2
=
k otrzymujemy
0
0
m
2
/
F
A
ω
−
=
(3.65)
Pełne rozwiązanie przybiera więc postać:
t
cos
t
m
F
t
sin
C
t
cos
C
x
0
0
0
0
2
0
1
2
ω
ω
−
ω
+
ω
=
(3.66)
Ostatni wyraz przedstawia drgania o nieskończenie rosnącej amplitudzie. Charakter
rozwiązania w warunkach rezonansu pokazuje rys. 3.9.
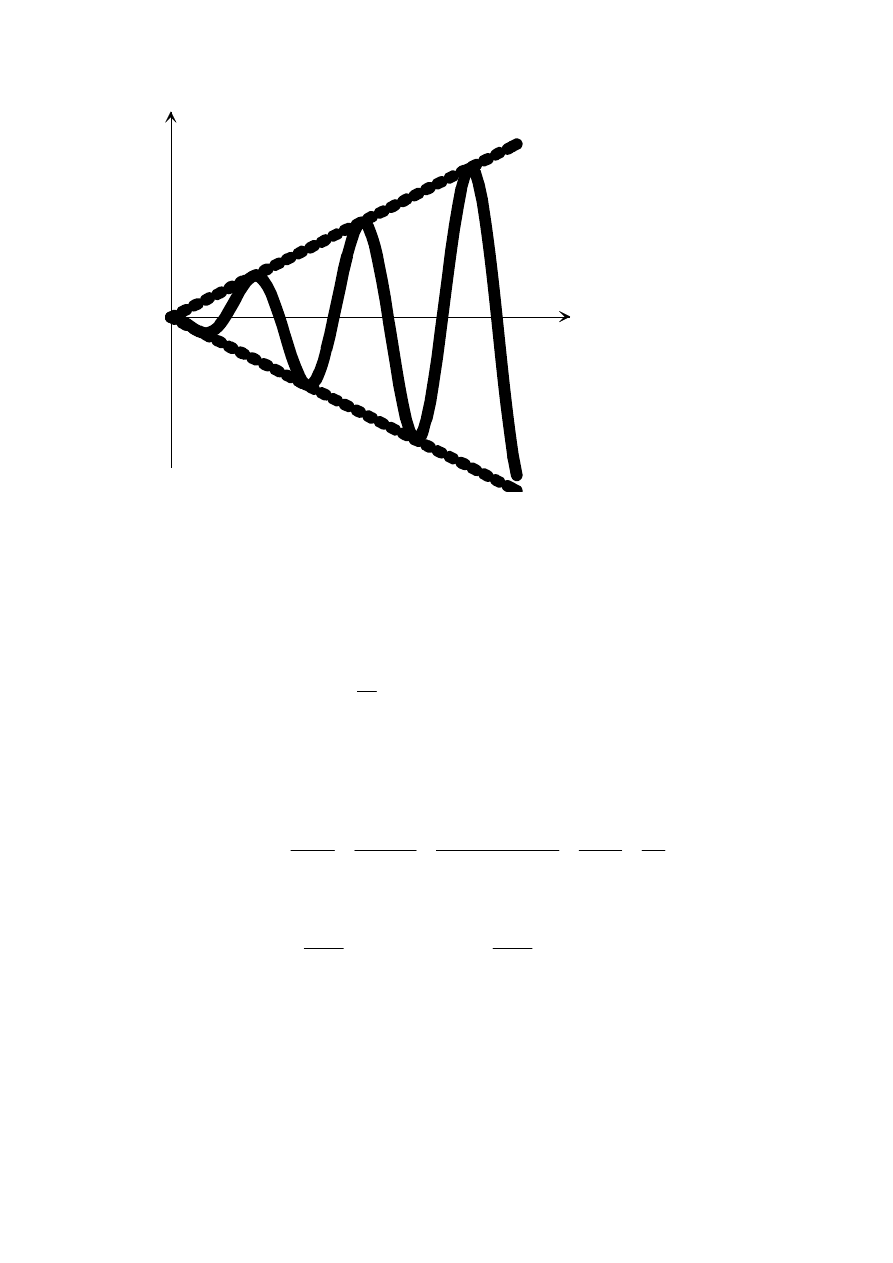
96
x
t
Rys.
3.9
Dudnienia. Przedyskutujmy teraz przypadek szczególny drgań wymuszonych układu
bez tłumienia. Niech na układ pozostający w spoczynku zacznie działać siła
harmonicznie zmienna o częstości
ω
mało różniącej się od częstości
ω
0
układu.
Wówczas równanie (3.50) można zapisać w postaci
( )
(
)
t
sin
t
sin
k
F
t
x
0
0
ω
ν
−
ω
β
=
(3.67)
Skoro
ω
≈
ω
0
, to
ν
≈ 1,
ω
+
ω
0
≈ 2
ω
0
, zaś różnica częstości
ω
0
−
ω
jest wielkością
małą, którą oznaczymy 2
α,
czyli
ω
0
−
ω
= 2a. Współczynnik
β
może być teraz
wyrażony jako:
(
)(
)
α
ω
=
α
ω
ω
≈
ω
−
ω
ω
+
ω
ω
=
ω
−
ω
ω
=
ν
−
=
β
4
4
1
1
0
0
2
0
0
0
2
0
2
2
0
2
0
2
zaś rozwiązanie (3.50) przybiera wtedy postać:
( )
(
)
t
sin
t
cos
k
F
t
sin
t
sin
k
F
t
x
α
⎟
⎠
⎞
⎜
⎝
⎛
ω
α
ω
=
ω
−
ω
α
ω
=
2
4
0
0
0
0
0
(3.68)
Ruch opisany równaniem (3.68) nosi nazwę dudnień i może być interpretowany jako
drgania z częstością
ω
, których amplituda zmienia się powoli tak jak funkcja sin
α
t,
której okres
2
π
/
α
jest duży w porównaniu z okresem funkcji cos
ω
t, czyli 2
π/ω
.
Charakter ruchu obrazuje rys 3.10
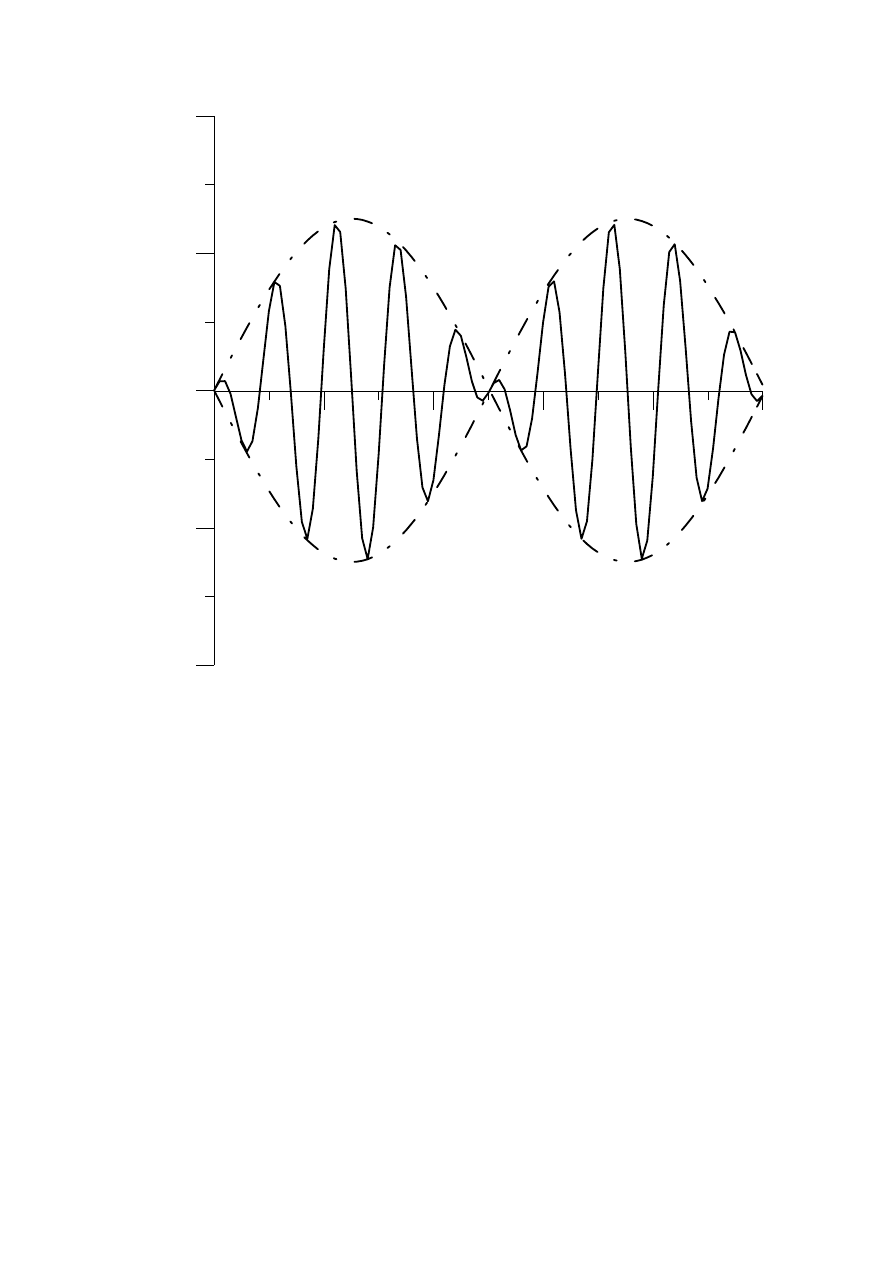
97
0.00
1.00
2.00
3.00
4.00
5.00
-0.80
-0.40
0.00
0.40
0.80
Rys. 3.10
Dudnienia niektórych urządzeń technicznych, np. generatorów lub turbin są słyszalne
i na ogół nie wywołują przyjemnych wrażeń.
3.3 TEN PODROZDZIAŁ OPUSZCZAMY
3.4 DRGANIA WYMUSZONE KINEMATYCZNIE
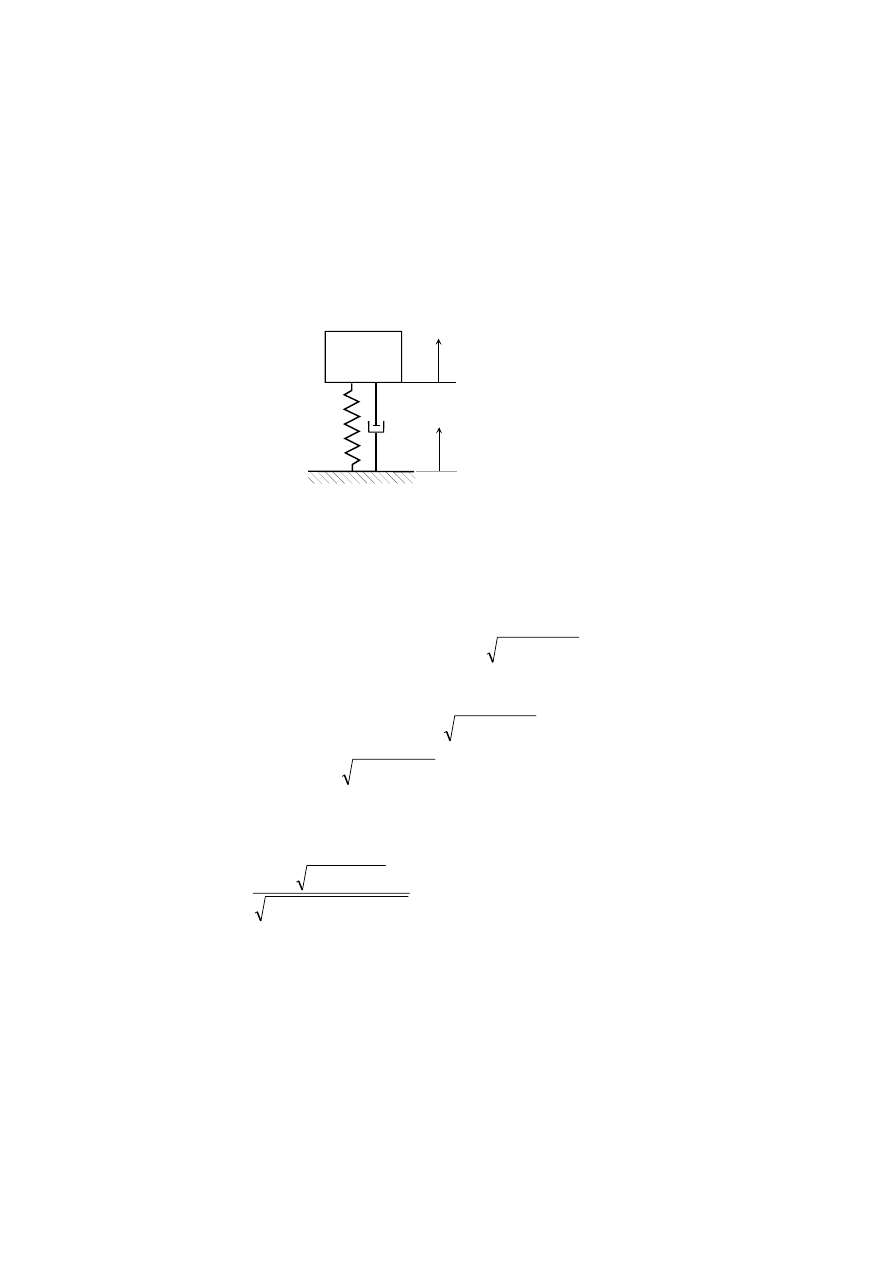
98
Wymuszeniem kinematycznym nazywać będziemy takie oddziaływanie z zewnątrz na
układ, które przejawia się zadanym (wymuszonym) ruchem wybranego punktu lub
zespołu układu. Rozważymy dwa przypadki tego rodzaju wymuszenia.
3.4.1 Wymuszenie ruchem harmonicznym punktu zamocowania sprężyny
Weźmy pod uwagę układ z rys. 3.17, którego podstawa porusza zgodnie z równaniem:
y
y
t
=
0
sin
ω
(3.87)
x
y = y
0
sin t
k
c
m
ω
Rys.3.17
Równanie ruchu masy ma zatem postać
(
) (
)
mx
c x y
k x y
&&
& &
= −
−
−
−
, czyli
mx cx kx cy ky
&&
&
&
+
+
=
+
(3.88)
Ale na podstawie (3.87) i po zabiegach analogicznych jak w p.1.2 otrzymujemy
( )
(
)
cy ky cy
t ky
t
y
k
c
t
&
cos
sin
sin
+
=
+
=
+
+
0
0
0
2
2
ω
ω
ω
ω
ω
α
(3.89)
gdzie )
k
/
c
(
tg
arc
ω
=
α
. Równanie ruchu ma zatem postać
( )
(
)
mx cx kx
y
k
c
t
&&
&
sin
+
+
=
+
+
0
2
2
ω
ω
α
(3.90)
Utożsamiając wielkość
( )
y
k
c
0
2
2
+
ω
z amplitudą
F
0
z równania (3.51) możemy też
wykorzystać jego rozwiązanie (3.56) wraz z (3.57a,b). Z porównania otrzymujemy
zatem
(
)
(
)
α
+
ε
−
ω
=
α
+
ε
−
ω
ω
+
ω
−
ω
+
=
t
sin
x
t
sin
)
c
(
)
m
k
(
)
c
(
k
y
)
t
(
x
0
2
2
2
2
2
0
(3.91)
Na podstawie (3.91) można wyznaczyć stosunek amplitudy
x
0
odpowiedzi
x(t) do
amplitudy wymuszenia kinematycznego
y
0
. Iloraz
x
0
/
y
0
nazywany jest
kinematycznym
współczynnikiem przenoszenia lub zdolnością przenoszenia ruchu i można go wyrazić
zarówno za pomocą wielkości wymiarowych
m, c, k i
ω
jak i wielkości
bezwymiarowych
γ
i
ν
(zob. (3.46)). Mamy:
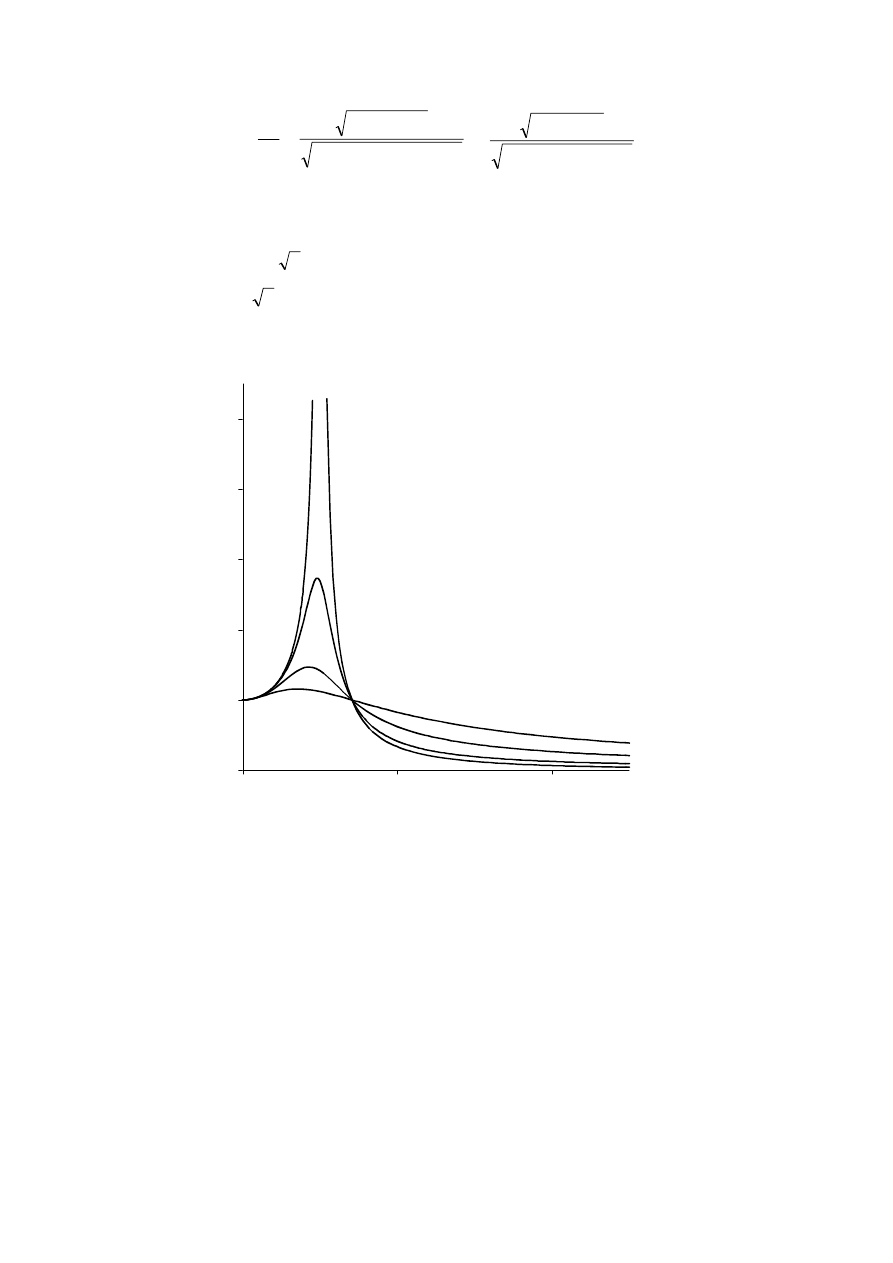
99
( )
x
y
k
c
k m
c
0
0
2
2
2 2
2
=
+
−
+
ω
ω
ω
(
)
(
)
2
2
2
2
)
2
(
)
1
(
)
2
(
1
γν
+
ν
−
γν
+
=
(3.92)
Na rys. 3.18 przedstawiony jest wykres kinematycznego współczynnika przenoszenia
dla różnych współczynników tłumienia
γ
. Pokazuje on, że o ile w zakresie wymuszeń o
częstościach
ω ≤
2
ω
0
tłumienie w układzie powoduje zmniejszenie amplitudy drgań,
o tyle dla
ω >
2
ω
0
tłumienie przyczynia się do zwiększenia amplitudy x
0
odpowiedzi.
Projektując zatem układy wibroizolacji musimy, w zależności od celu i zakresu
częstości wymuszeń, odpowiednio dobierać tłumienie układu.
0.00
2.00
4.00
0.00
1.00
2.00
3.00
4.00
5.00
γ = 0
γ = 0.2
γ = 0
γ = 0.5
γ = 1
Rys
.3.18
3.4.2 Wymuszenie bezwładnościowe (ruchem obrotowym masy niewyważonej)
W licznych maszynach występują pojedyncze elementy lub podzespoły wirujące.
Jednym z przejawów ich niewyważenia jest niewłaściwe położenie środka masy takiego
elementu, jak np. wał lub koło zębate. Tę sytuację możemy zobrazować w sposób
pokazany na rys. 3.19.
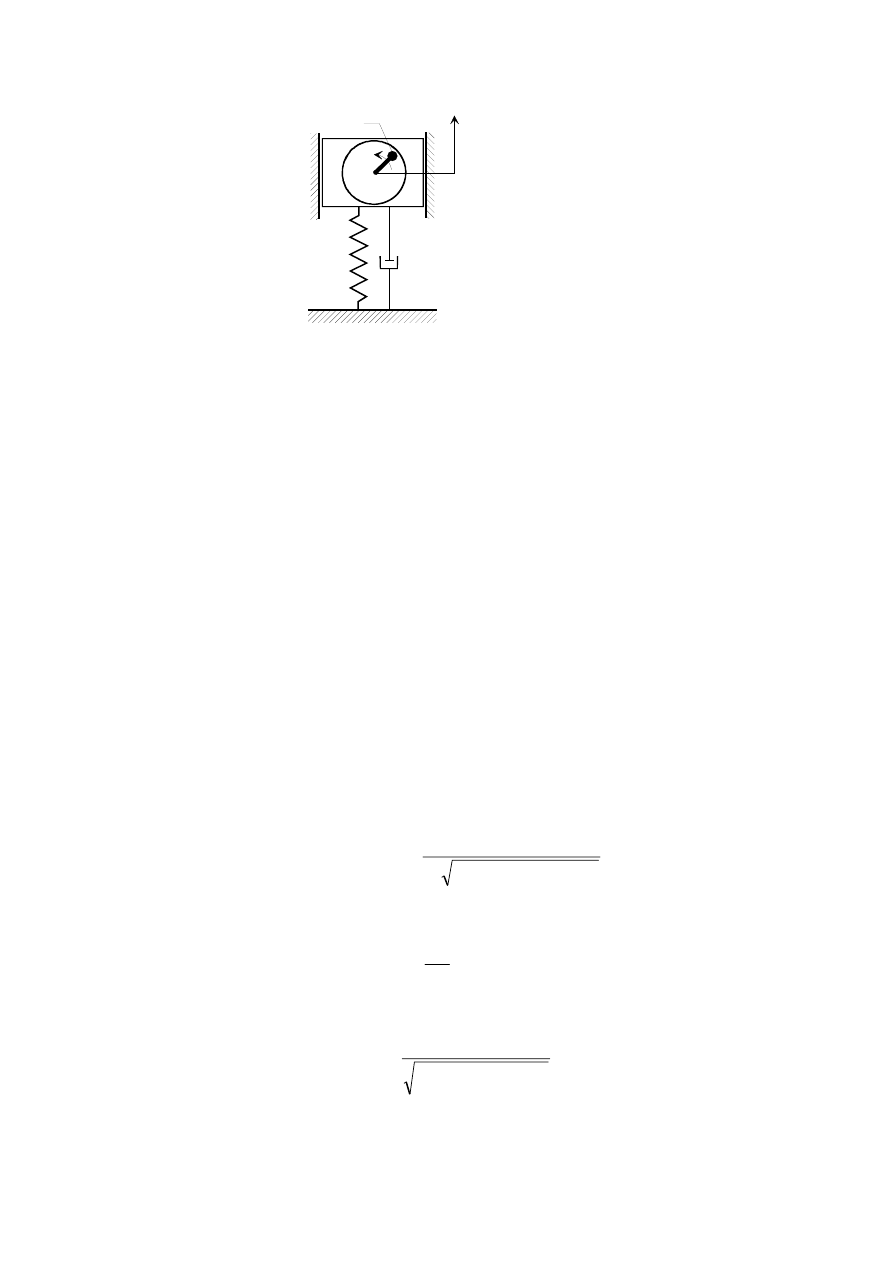
100
x
e
m
k
c
Μ
0
ω
Rys. 3.19
Maszyna o całkowitej masie
M jest podparta na elementach sprężystych o sztywności k
i tłumiku o współczynniku tłumienia wiskotycznego
c. Niejednorodność materiałowa
części wirujących przejawia się w mimośrodowym położeniu masy
m. Wartość
mimośrodu jest
e, a prędkość kątowa części wirujących jest
ω
.
Przemieszczenie masy
m w kierunku pionowym wyraża się więc
wzorem
x
x e
t
m
= + sin
ω
, skąd
&&
&&
sin
x
x
e
t
m
= − ω
ω
2
(3.93)
Równanie ruchu korpusu maszyny (bez wirującej masy
m) ma więc postać;
(
)
M m x mx
cx kx
m
−
+
= − −
&&
&&
&
(3.94)
Po podstawieniu (3.93) do (3.94) i uporządkowaniu otrzymujemy równanie:
Mx cx kx
me
t
&&
&
sin
+
+
=
ω
ω
2
(3.95)
które przypomina (3.51). Utożsamiając
F
0
z równania (3.51) z
me
ω
2
możemy
zaadoptować wyniki uzyskane w p. 3.2.2. W szczególności drgania ustalone mają
postać
( )
(
)
ε
−
ω
ω
+
ω
−
ω
ω
=
t
sin
h
4
)
(
M
me
t
x
2
2
2
2
2
0
2
w
(3.96)
gdzie
ω
0
2
=
k/M. Rozwiązanie (3.97) może być wyrażone w następujący zwięzły sposób
( )
(
)
x t
me
M
t
w
r
=
−
β
ω
ε
sin
(3.97)
gdzie
β
r
jest współczynnikiem zwielokrotnienia amplitudy, który tym razem ma postać:
(
)
( )
β
ν
ν
νγ
r
=
−
+
2
2 2
2
1
2
(3.98)
Wykres
β
r
dla różnych tłumień
γ
pokazany jest na rys. 3.20.
Document Outline
- Rys.2.19
Wyszukiwarka
Podobne podstrony:
Hałas i drgania mechaniczne
drgania mechaniczne
Wykład 7 Drgania sieci krystalicznej
Drgania
Drgania ukladu o jednym stopniu swobody v2011
Fizyka dla liceum Drgania i fale mechaniczne
18c drgania
IMIR 7 Drgania
drgania tlumione
fizyka drgania i fale pr klucz
Dynamika drgania i wibracje (2)
Drgania Ćwiczenie nr 13, Politechnika Lubelska, Studia, semestr 5, Sem V, Sprawozdania, Laborka, Lab
Przykład-drgania ogólne, bhp
Drgania tlumione wahadlo, Fizyka, FIZYKA, Fizyka ćwiczenia Miszta, Fizykaa, LabFiz1 od izki, LabFiz1
Drgania kolo 2
Drgania i?le TEST B
karta oceny ryzyka zaw na hałas i drgania mechaniczne
Drgania i?le sprężyste praca klasowa
więcej podobnych podstron