1
POLITECHNIKA WARSZAWSKA
WYDZIAŁ
MECHANICZNY ENERGETYKI I LOTNICTWA
ZAKŁAD MASZYN I URZĄDZEŃ
ENERGETYCZNYCH
PRACA PRZEJŚCIOWA
KONRAD MOTYLIŃSKI
OPTYMALIZACJA PROCESÓW ENERGETYCZNYCH POPRZEZ ZASOTOWANIE
NOWOCZESNYCH ALGORYTMÓW REGULACJI
nr album: 211 404
Energetyka
Promotor: dr hab. inż. Konrad Świrski
Warszawa, wrzesień 2010

2
Spis treści
3
Zmienne
sterujące
(MV)
Zakłócenia
(DV)
Zmienne
regulacyjne
(CV)
Obiekt
1 Podstawowe układy regulacji bloku energetycznego
Blok energetyczny jest to zespół urządzeń, które wspólnie mają na celu produkcję
energii elektrycznej i ewentualnie cieplnej. Składa się on z turbogeneratora, kotła parowego,
systemów doprowadzania paliwa do kotła, odprowadzania spalin, wyprowadzania energii
elektrycznej i inne. Każde z tych urządzeń musi być odpowiednio regulowane, aby mogło
działać z jak największą sprawnością i jednocześnie odpowiednio współpracować z
pozostałymi podzespołami. Na początku XX wieku wszystkie te czynności regulacyjne były
kierowane przez jednego lub więcej pracowników – operatorów. Z czasem jednak, wraz z
rozwojem technologii, wszystkie działania dążyły do zminimalizowania ręcznej regulacji
przez automatyzację. Najprostszy schemat układu regulacji można przedstawić następująco:
Układ ten składa się z jednego elementu i 3 sygnałów. Jako obiekt należy rozumieć
urządzenie odpowiadające za sterowanie danym procesem. Przykładem może być wentylator,
odpowiadający za ilość dostarczanego powietrza do kotła. Zmienne sterujące (Manipulated
Variables) są to zadane wartości skierowane na wejściu do obiektu, jakie chcemy otrzymać w
procesie na wyjściu. Przykładowo mamy wartość oczekiwaną współczynnika nadmiaru
powietrza λ. Chcemy, aby obiekt regulujący (wentylator) utrzymywał na wyjściu zadaną
wartość tego współczynnika. Zmienne regulowane (Controlled Variables) to wartości (np.
ilość podawanego powietrza) jakie otrzymaliśmy na wyjściu z obiektu.
Bardzo często jest tak, że otrzymana wartość nie jest taka jak oczekiwano. Jest to
spowodowane występowaniem tak zwanych zakłóceń, (Disturbance Variables). Zazwyczaj
dany proces nie jest kompletnie samodzielny i jest on zależny od innych podsystemów.
Poszczególne pętle regulacji oddziałują na siebie. Każda z nich ma ustalone pewne parametry,
które mają wpływ na działanie całego systemu. Jeśli nastąpi jakaś zmiana wartości jednego
parametru, to ma to wpływ na pozostałe. Właśnie ta zmiana jest zakłóceniem. W przypadku
współczynnika nadmiaru powietrza, zakłóceniem może być zmienione obciążenie kotła,
zmienna jakość paliwa dostarczanego do kotła. Dla danego obciążenia potrzebujemy ustalonej
wartości λ i wraz ze zmianą ilości podawanego paliwa, zmienia się zapotrzebowanie na
powietrze. Innym przykładem zakłóceń są awarie (np. dziura w kotle).
Do podstawowych układów regulacji bloków energetycznych zaliczamy regulatory:
Obciążenia
Ciśnienia
Wody zasilającej
Spalania (wentylatory)
Turbiny
Temperatury
4
Poniżej przedstawiono przykładowy schemat układów regulacji bloku energetycznego:
- Regulator obciążenia bloku (RP)
Regulator ten zajmuje się zmianami obciążenia bloku energetycznego. W trakcie
działania bloku, mamy określony wewnętrzny plan produkcji wytwarzania energii, który jest
ustalany wraz ze współpracą z Operatorem Systemu Przesyłowego (OSP). Taki regulator
pracuje w trybie Automatycznej Regulacji Częstotliwości i Mocy (ARCM). Sygnałem
wejściowym jest Bieżący Punkt Pracy (BPP). Zawiera on typ stanu, kwalifikację pracy lub
postoju, typ swobody oraz wielkość bazowej mocy brutto (określonej przy założeniu
częstotliwości 50 Hz oraz wartości sygnału Y1=0), z jaką powinna pracować jednostka
wytwórcza w danym kwadransie.
Regulator obciążenia bloku oddziałuje na ostateczną ilość paliwa podawanego do
kotła. Wyznaczoną wartość uzyskujemy poprzez zastosowanie jednego z dwóch trybów pracy
regulatora obciążenia.
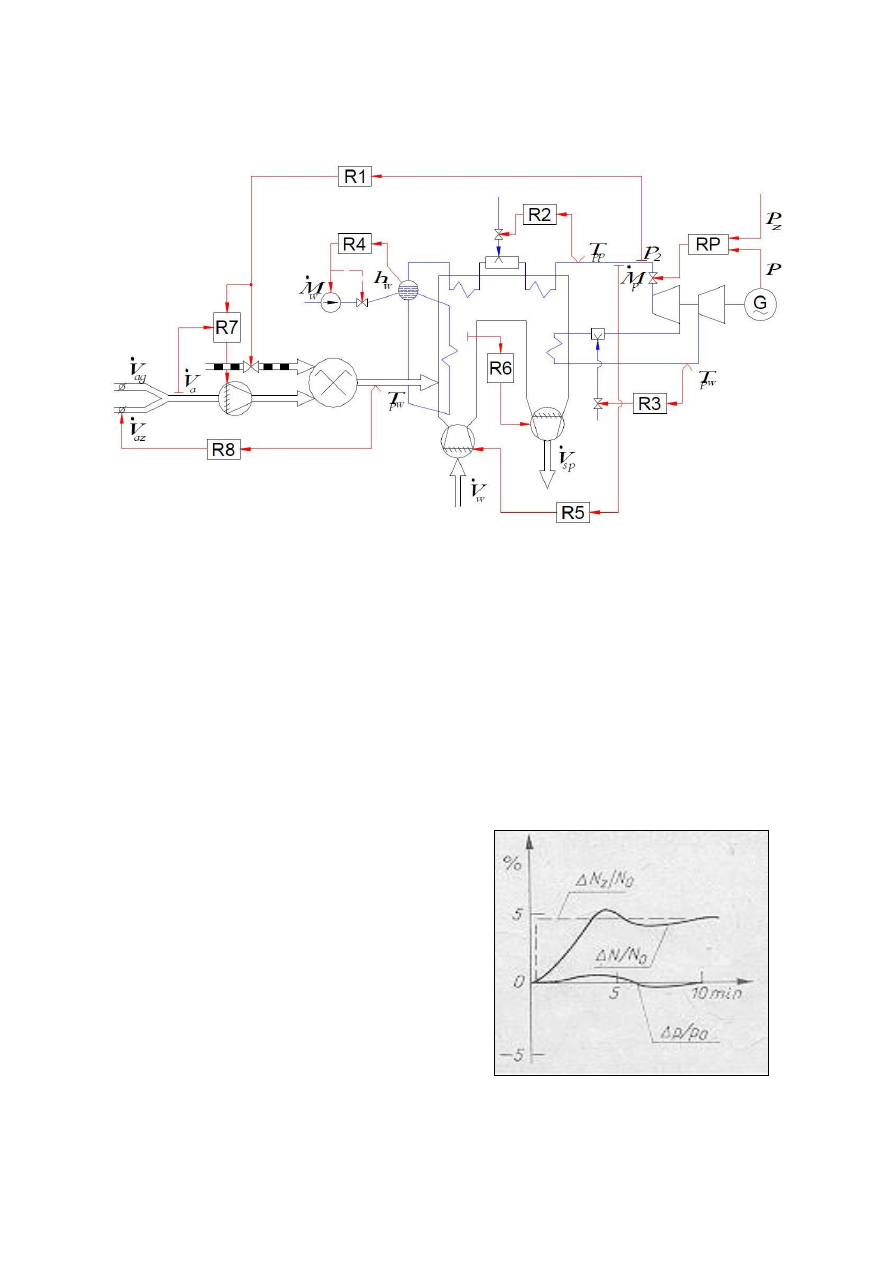
Pierwszym z nich jest tryb pracy z
wiodącym kotłem (boiler follow). Reguluje on
zmianę otrzymanej mocy poprzez oddziaływanie
na wydajność (suma obrotów podajników węgla)
młynów węglowych. Charakteryzuje się on stabilną
pracą kotła oraz bardzo niewielkim skokiem
ciśnień, co pokazuje wykres obok. Wadami tego
trybu są wolny przebieg zmiany mocy oraz duża
bezwładność cieplna, co oznacza, że ścianki kotła
dłużej się nagrzewają, a co za tym idzie, długo
oddają ciepło.
5
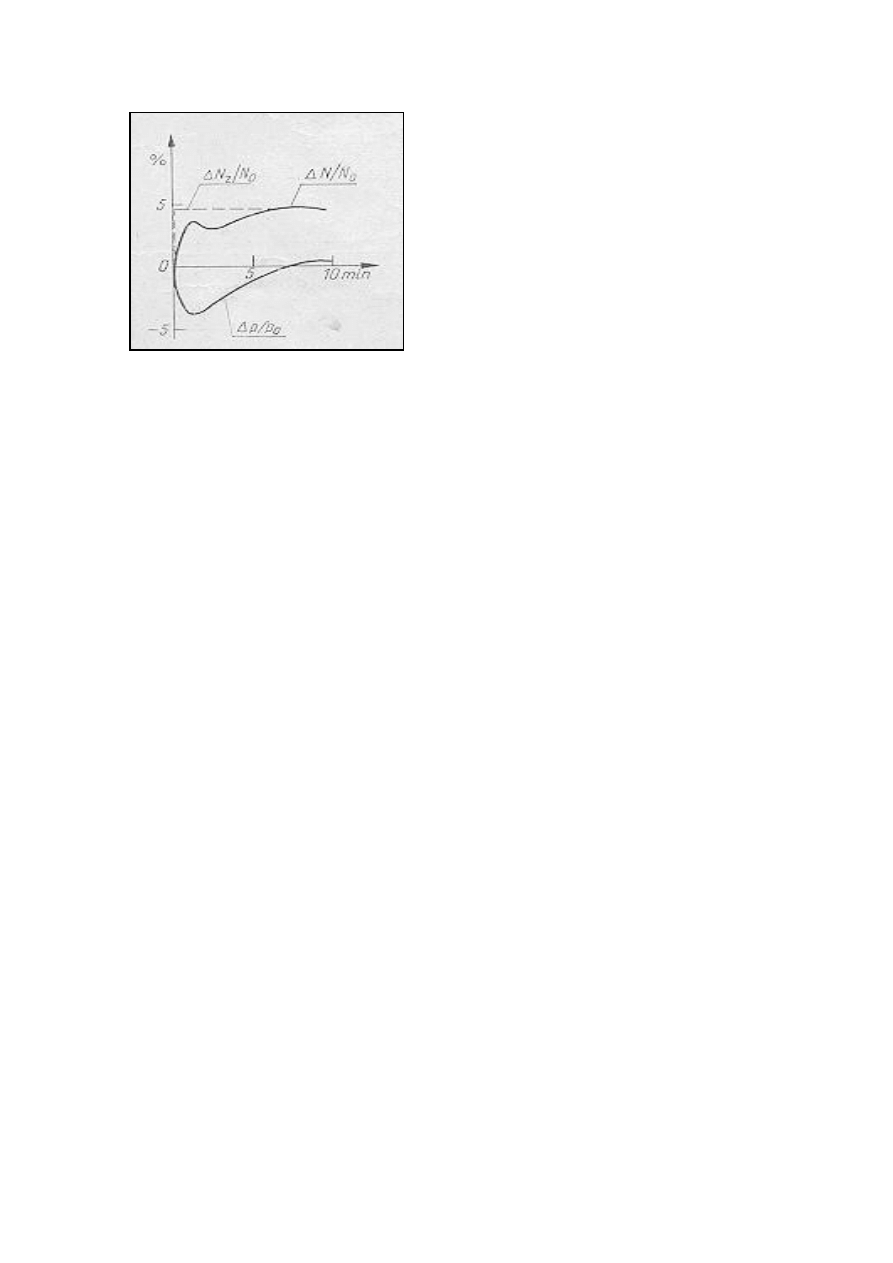
Drugim trybem pracy jest układ z wiodącą turbiną
(turbine follow). Odbywa się to poprzez zmianę
otwierania zaworu regulacyjnego turbiny, co
powoduje zmianę przepływu pary i wartości
ciśnienia. W rezultacie, zabieg ten ma wpływ na
ilość podawanego paliwa do kotła, a co za tym
idzie uzyskaną moc wyjściową. Tryb ten cechuje
się szybką możliwością zmiany mocy bloku, co
jest bardzo korzystne przy współpracy z trybem
ARCM. Jak pokazano na rysunku obok,
zastosowanie tego trybu wiąże się z dość
gwałtowną zmianą ciśnienia pary.
- Regulator ciśnieniowy pary (R1)
Zadaniem tego regulatora jest utrzymanie stałego ciśnienia pary przed turbiną, jak
również w miarę efektownie przeciwdziałać zakłóceniom. Poprzez regulację ciśnienia,
regulator ten ma wpływ na finalną ilość podawanego paliwa. Przez koordynację działania z
regulatorem obciążenia bloku, modyfikujemy prędkość obrotową podajników węgla do
młynów. Wartość zadana regulatora ciśnienia, może być zależna od obciążenia bloku. Wadą
regulatorów ciśnienia jest wrażliwość na zakłócenia i mała stabilność ich pracy, szczególnie
w stanach nieustalonych. Występuje przez to niejednoznaczność realizowanej funkcji, co w
konsekwencji doprowadza do niestabilnej pracy elementów wykonawczych oraz całego
obiektu regulowanego.
- Regulator wody zasilającej (R4)
Regulator zasilania wodą odpowiada za odpowiednie zrównoważenie ilości wody
zasilającej i pary odprowadzanej. Dodatkowo jest odpowiedzialny za utrzymanie określonej
ilości wody w walczaku. Steruje on pompą zasilającą. Jest to regulator trójimpulsowy. Przy
regulacji trójimpulsowej w układzie pomiarowym regulatora mierzone są: odchyłka poziomu
wody od wartości zadanej, obciążenie masowe kotła parowego oraz natężenie dopływu wody
zasilającej. Łączne oddziaływanie impulsów od obciążenia i dopływu wody podtrzymuje stały
stosunek między tymi dwoma wielkościami, a impuls od zmian poziomu wody ma znaczenie
korygujące. Zastosowanie systemu trójimpulsowej regulacji modułowej zapewnia uzyskanie
doskonałej stabilności poziomu wody w kotle parowym.
- Regulatory spalania (R5, R6)
Za regulację spalania odpowiadają 2 regulatory. Pierwszy z nich jest odpowiedzialny
za powietrze doprowadzane do kotła, a drugi za odpowiednie odprowadzanie spalin z kotła.
Celem pierwszego jest zrównoważenie ilości powietrza i paliwa, aby otrzymać zamierzony
współczynnik nadmiaru powietrza. W tym przypadku sterujemy bezpośrednio kierownicami
wentylatorów podmuchu. Drugi regulator ma za zadanie utrzymanie w kotle podciśnienia.
Jest to wymagane, aby przebieg procesu spalania odbywał się bez problemów (np. utrzymanie
szczelności kotła, jeśli jest on projektowany do pracy na podciśnieniu). Regulator ten
oddziałuje bezpośrednio na kierownice wentylatorów ciągu, które odprowadzają spaliny.
6
PID
PID
Set Point
SP
PV
PV
flow
T
1
T
2
T
3
- Regulator turbiny
Ważnym elementem sterowania jest regulacja turbiny, a dokładnie kontrolowanie
ilości obrotów wału. Ilość ta jest właściwie korygowana, zależnie od danego zapotrzebowania
na wytwarzaną energię. Dzieje się to poprzez zastosowanie odpowiednich regulatorów
hydraulicznych. Przed turbiną znajdują się zawory regulacyjne, które są sterowane przez te
regulatory.
- Regulator temperatury (R2, R3)
Rolą regulatorów temperatury jest utrzymywanie stałej temperatury pary świeżej i
wtórnej na wyjściach z przegrzewaczy. Jest to możliwe poprzez regulację ilości wody
wtryskiwanej chłodzącej poszczególne stopnie przegrzewaczy. Wyjścia regulatorów
wpływają bezpośrednio na siłowniki zaworów wtryskiwaczy. Znajdują się one bezpośrednio
za kotłem oraz przy upustach pary wtórnej. Oto przykład kaskadowy regulatorów PID
kontrolujących jeden stopień przegrzewacza:
W podanym przykładzie prawy PID czyta temperaturę za przegrzewem, którą chcemy
kontrolować. Wartością zadaną na ten regulator PID to Set Point (np. 540 °C). PID ten jest
wolny, czyli ma małe wzmocnienie. Ma to na celu nie „rozhuśtanie” lewego PID’a, który
steruje bezpośrednio wtryskiem. Prawy PID generuje SP dla lewego PID (szybkiego), który
szybko reaguje na zmianę temperatury na końcu za przegrzewem (po prawej). Zaletą tego
układu jest duża stabilność kontrolowanej temperatury oraz możliwość szybkiej reakcji na
zakłócenie temperatury.
7
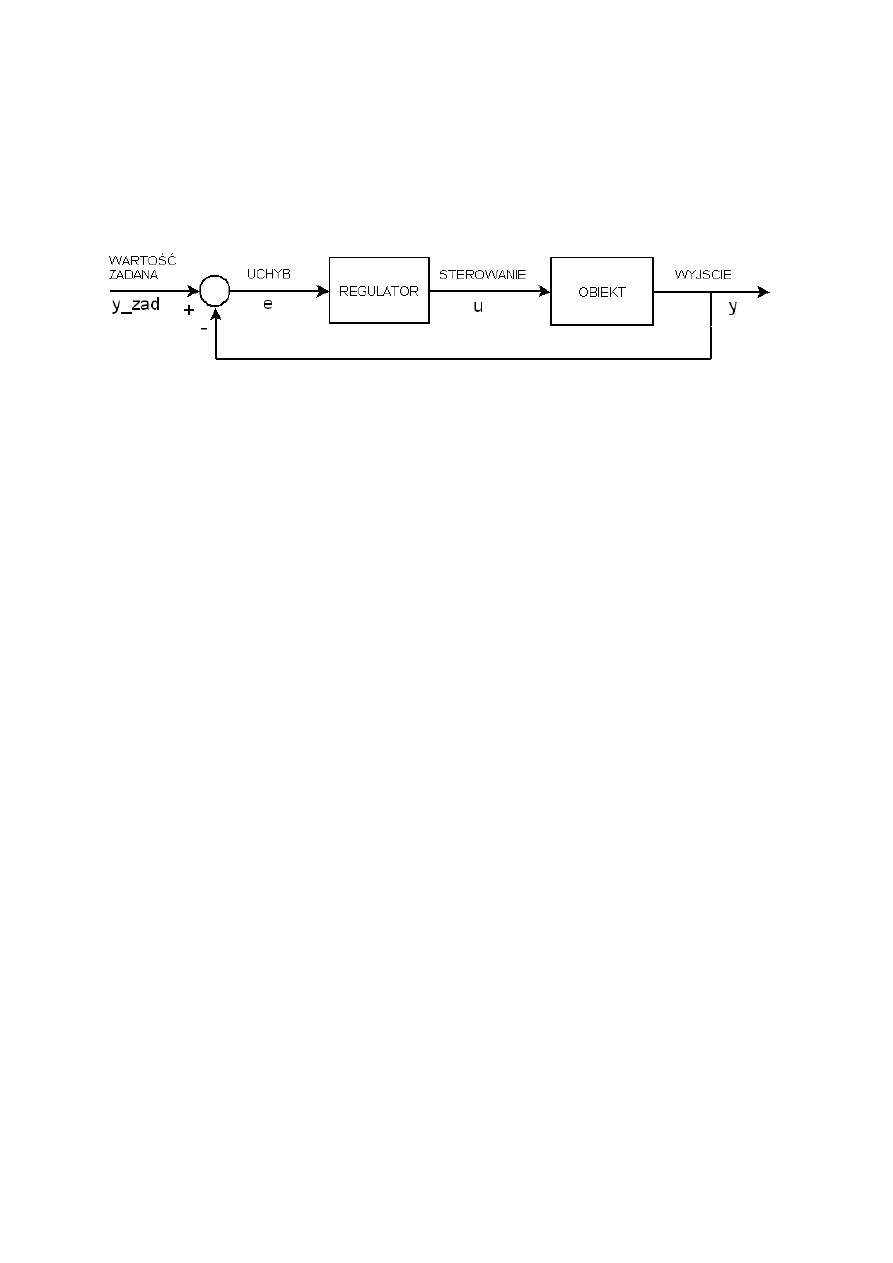
2 Typowe struktury regulacji wykorzystujące regulator PID
W dzisiejszych czasach klasyczne układy regulacji są oparte w głównej mierze na
regulatorach PID (Proportional-Integral-Derivative controller). Oto schemat tego regulatora:
Układ ten składa się z trzech członów: proporcjonalny (P), całkujący (I),
różniczkujący (D). Człon proporcjonalny jest odpowiedzialny za sterowanie proporcjonalne
do uchybu. Człon całkujący zapamiętuje sumaryczny uchyb zebrany na dotychczasowym
horyzoncie czasowym. Ostatni człon różniczkujący zajmuje się określaniem przyszłych
działań i zachowań uchybu. Po dodaniu tego członu, regulator zachowuje się bardziej
„agresywnie”. Wykorzystując człon różniczkujący łatwo dochodzi to destabilizacji układu
regulacji, ale czas dojścia do wartości zadanej jest mniejszy. Celem PID jest utrzymanie
wartości wyjściowej na określonym poziomie, czyli wartości zadanej. W przemyśle szacuje
się, że około 90% regulatorów to PID. Jednym z przykładów jest przemysł samochodowy,
gdzie jego zadaniem jest utrzymywanie stałej prędkości samochodu bez względu na warunki
jazdy, tzw. tempomat. Regulatora PID używa się również do sterowania temperaturą procesu,
ciśnieniem, natężeniem przepływu, składem chemicznym, siłą, prędkością i innymi
wielkościami. W energetyce nie ma procesu regulacji, który nie wykorzystywałby regulatora
PID.
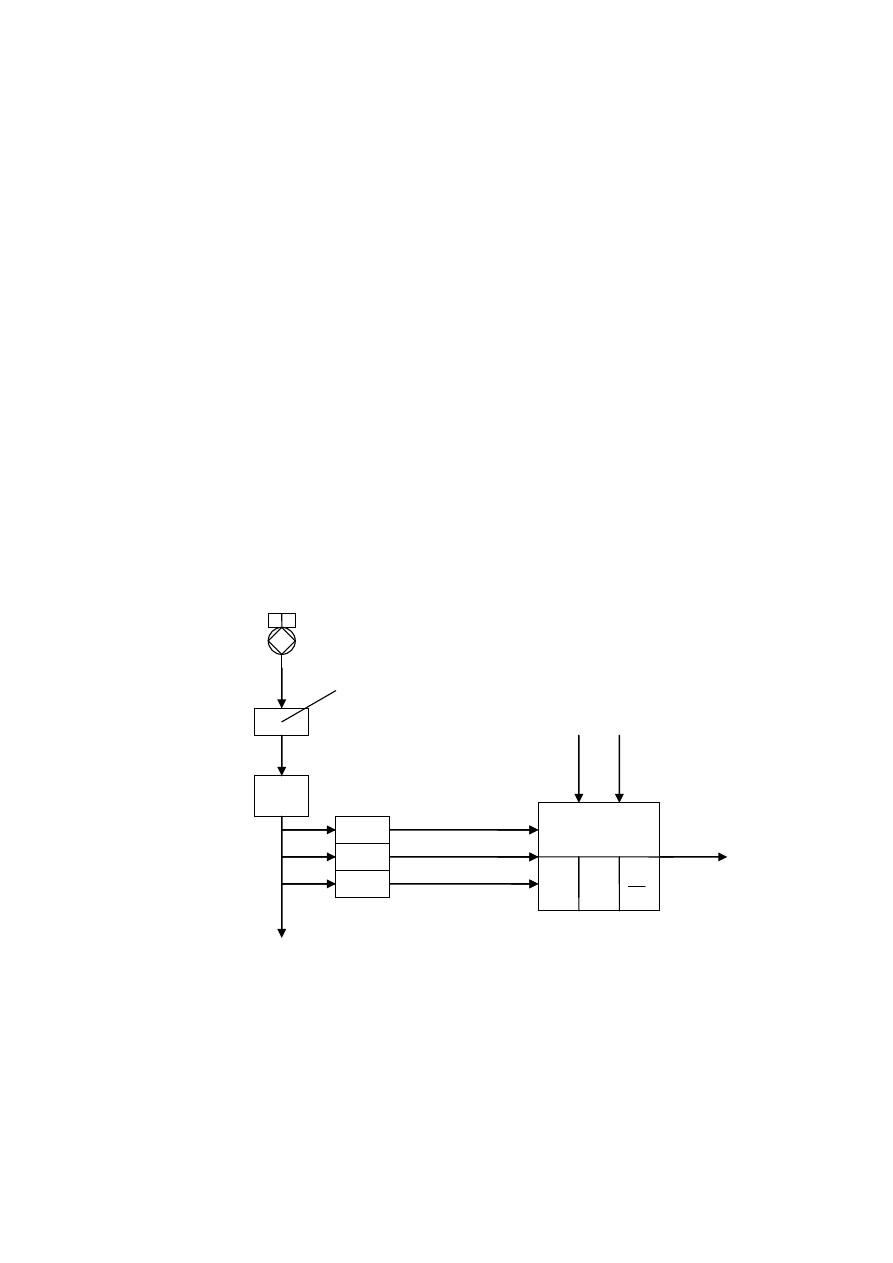
2.1 Układ kontroli spalania w kotle
Pomiar i kontrola dopływu powietrza do komory spalania jest kluczem do
odpowiedniego funkcjonowania systemu kontroli spalania w kotle. Dokładne pomiary
doprowadzanego powietrza nie należą niestety do prostych, dlatego inżynier strojący układy
regulacji musi czasami działać intuicyjnie podczas wprowadzania wartości zadanej. Dla
kotłów współczynnik nadmiaru powietrza określa się w przedziale λ = 1,1 ÷ 1,2. Jest to
spowodowane tym, że z jednej strony chcemy, aby dochodziło do spalania węgla całkowitego
i zupełnego, dzięki czemu można znacznie zredukować straty energetyczne. Aby mieć
pewność, że tak się stanie to dodajemy więcej powietrza niż teoretycznie potrzeba. Niestety z
drugiej strony dążymy do tego żeby zminimalizować liczbę spalin, czego efektem jest
potrzeba podawania mniejszej ilości powietrza.
8
Otwarta pętla
Zamknięta pętla
f(x)
FT
PI
Set Point dla
zapotrzebowania
podawanego
powietrza
T
A
Przepustnica lub urządzenie
kontroli prędkości
f(x)
f(x)
T
A
Przepustnica lub urządzenie
kontroli prędkości
f(x)
f(x)
Zapotrzebowanie podawanego
powietrza
Połączenie z
feed-forward
sterowania
pracy kotła
Połączenie z
feed-forward
sterowania
pracy kotła
Połączenie z
feed-forward
W procesie kontroli doprowadzanego powietrza można zastosować układ z otwartą
lub zamkniętą pętlą. Przykładowe rozwiązania przedstawiono poniżej:
W otwartej pętli układ zapotrzebowania powietrza w spalaniu, wynikający z
obciążenia kotła parowego, jest realizowany przez odpowiednie ustawienie urządzenia
sterującego. Oczekiwanym rezultatem jest konkretna wartość podawanego powietrza, która
została wyregulowana przez prędkości wentylatorów oraz parametry sterującego urządzenia.
Dla wentylatorów pracujących ze stałą prędkością, urządzenie sterujące określa w
przybliżeniu natężenie przepływu. Odnosi się to tylko do sytuacji, gdy znaczna część
całkowitego spadku ciśnienia w instalacji przechodzi przez urządzenie kontrolujące. W
przypadku, kiedy to nie następuje i ciśnienie waha się w górę lub w dół, to natężenie
przepływu jest zmienne.
Do zrekompensowania takich zmian stosuje się układ z zamkniętą pętlą ze
sprzężeniem zwrotnym. W rezultacie natężenie przepływu i sygnał sterujący pozostają takie
same. W takim wypadku odchylenie od zadanego Set Pointa przepływu powietrza przechodzi
w sprzężeniu zwrotnym do urządzenia sterującego, które koryguje i utrzymuje ilość
podawanego powietrza. To jest typowy układ kontrolny ze sprzężeniem zwrotnym, który
wykorzystuje układy proporcjonalno-całkujące.
9
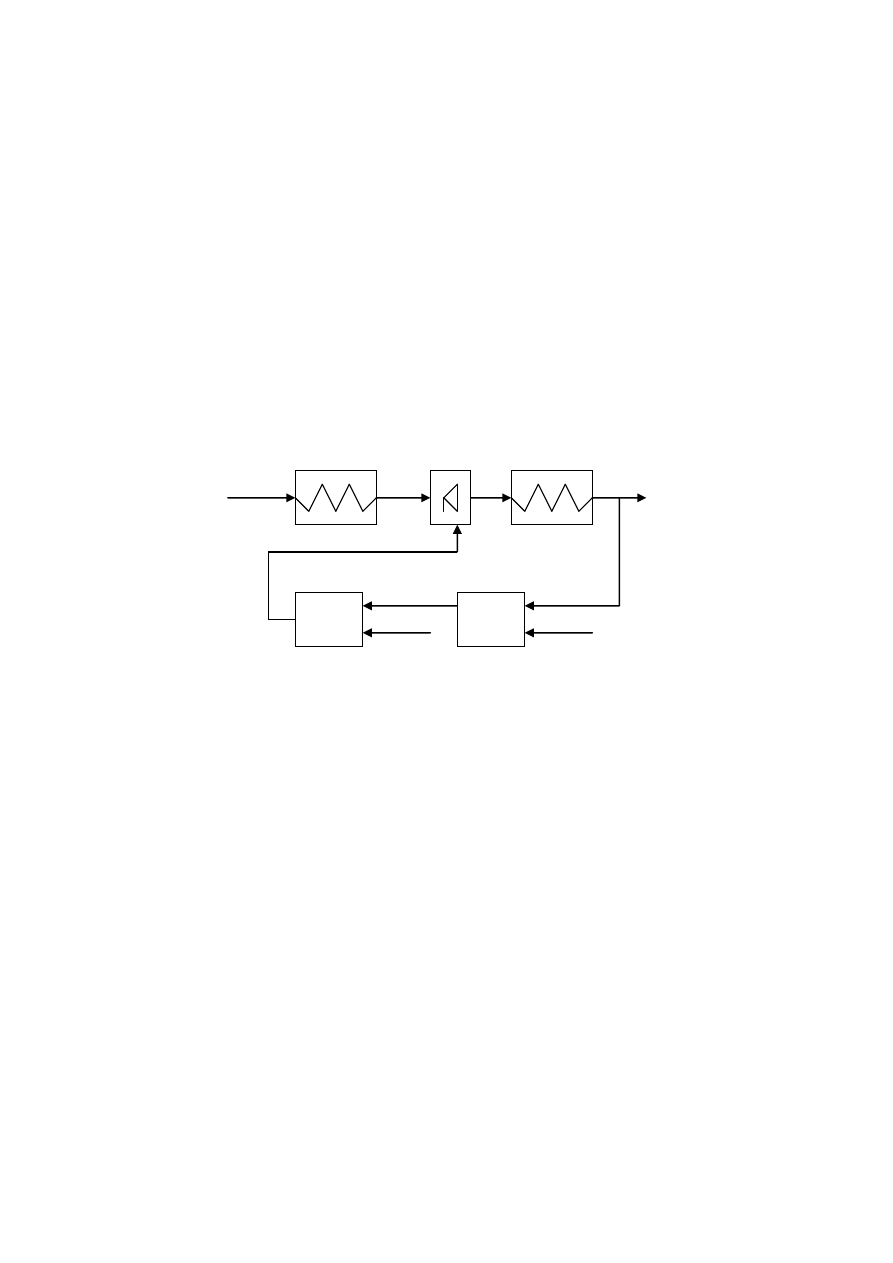
2.2 Układ regulacji temperatury pary
Strategie regulacji temperatury pary dla każdego normalnego kotła, są
rekomendowane przez jego producenta. Dla kilku instalacji i dla w miarę stałego przepływu
pary, wystarczające jest zastosowanie pojedynczego elementu ze sprzężeniem zwrotnym. W
zwykłych instalacjach dla różnych kotłów stosuje się różnego rodzaju formy ze sprzężeniem
zwrotnym, kaskadowe lub ich kombinacje. Poniżej zaprezentowano przykład feedforward-
plus-feedback regulacji pary przegrzanej z wykorzystaniem strumienia wody:
Natężenie przepływu powietrza jest wskaźnikiem nadmiaru powietrza w spalaniu,
więc pomiar podawanego powietrza jest używany zastępczo lub jako sygnał feed-forward. W
sumatorze (1) sygnał jest połączony z sygnałem wyjścia od regulatora temperatury pary ze
sprzężeniem zwrotnym (2). Wyjście z tego sumatora wyprowadza sygnał, który dochodzi do
sterowania zaworów strumienia wody (3). Regulator sprzężenia zwrotnego jest połączony i
wspierany przez układ przeciw-przeciążeniowy (4). Układ ten zapewnia minimalną wartość
wyjściową śledzonego sygnału dla regulatora (2). Kiedy obciążenie kotła jest niższe od
zakresu regulacji temperatury pary, sygnał wyjściowy (2) spowoduje, że sumator (1) ustawi
zawór strumienia wody w tryb „ciągle zamknięty”.
f(x)
f(x)
FT
TT
P
T
A
A
PI
PI
A
Set
Point
Strumień wody
5%
±
Σ | ±
Δ
0 - 100%
<
Przepływ
powietrza
Temperatura
pary
+
+
+
+
-
-
(1)
(2)
(3)
(5)
(4)

10
Podczas kalibracji i strojenia tego układu, związek pomiędzy podawanym powietrzem
i sygnałem regulatora zaworu strumienia wody jest wyznaczony przez testowanie w stanie
stacjonarnym i podczas pracy z różnymi szybkościami przepływu kotła parowego. Kiedy ten
związek jest znany, sygnał podawanego powietrza jest skalowany i funkcjonalnie
dostosowuje zmiany przez funkcję f(x) i zmianę wzmocnienia wejścia sumatora (1).
Wraz z sygnałem ilości podawanego powietrza w momencie, kiedy temperatura pary
jest otrzymana bez udziału strumienia wody, sygnał sumatora (1) (po wzmocnieniu sygnału
wejściowego) jest dostosowywany do 50% wartości w przypadku, kiedy wzmocnienie na
wejściu wynosiłoby 1. Błąd na wyjściu jest tak ustawiany, że będzie on wynosił +5%, a w
drugim sumatorze (5) ustawia się go na poziomie -5%. Ostatecznie na wyjściu z sumatora (5)
dostaniemy sygnał z błędem równym 0, który następnie jest kierowany do regulatora zaworu.
Wstępne regulowanie w trybie on-line kontrolera PI (2) powinno się odbywać w stanie
stacjonarnym po wykonaniu testów w dynamicznym trybie pracy obciążenia kotła. Mniejsze
modyfikacje mogą być konieczne ze względu na niedoskonałość lub zmienne wartości
zależności w części feed-forward systemu. Jako że człon feed-forward spełnia tutaj główną
rolę, można ustawić stałą całkowania dla członu całkującego rzędu 0,1 powtórzeń na minutę.
Modyfikacje układu (4) umożliwia układowi przejście w normalny zakres regulacji dość
płynnie, bez większych skoków na temperaturze pary.

11
3 Problemy regulacji klasycznej
Regulatory PID, składające się na warstwę regulacji bezpośredniej, nie są w stanie
zapewnić wysokiej jakości regulacji w sytuacji, gdy proces technologiczny posiada istotnie
nieliniowe charakterystyki. Innym problemem jest długi czas odpowiedzi wyjść danego
obiektu na zmianę sterowania. PID ma również kłopoty, gdy występuje znaczna liczba wejść
sterowanych i zakłóceń oraz niemożliwe do pominięcia transmitancje skrośne. Dodatkowo
charakterystyki procesów technologicznych zmieniają się wraz z upływem czasu, co wynika
ze zużycia urządzeń wykonawczych i instalacji technologicznej składającej się na obiekt
regulacji, zmian właściwości chemicznych używanych substratów, oraz warunków
zewnętrznych.
Jeżeli dokładność modelu regulacji jest niewystarczająca, wówczas jakość samej
regulacji może nie być satysfakcjonująca. W szczególnym przypadku może nawet być gorsza
niż w klasycznych układach regulacji opartych na regulatorach PID. Jednym z kluczowych
problemów dotyczących regulacji jest zapewnienie bezpieczeństwa i odpowiednio wysokiej
jakości regulacji w sytuacji niewystarczającej dokładności modelu.
Poniżej przedstawiono główne problemy dotyczące bieżącej identyfikacji modelu:
•
wyznaczenie parametrów modelu przy niewystarczającej zmienności sygnałów, gdy
występują szumy pomiarowe
•
wyznaczenie parametrów modelu podczas pracy w zamkniętej pętli sprzężenia
zwrotnego
•
stosunkowo duży nakład mocy obliczeniowych potrzebny podczas pracy w trybie
on-line
Wśród nowoczesnych rozwiązań, dzięki którym można wyeliminować znaczną część
wyżej wymienionych problemów, są sterowania oparte na regulatorach predykcyjnych z
wewnętrznymi modelami procesu, regulatorach neuronowych, immunologicznych, samo
adoptujących się do punktu pracy bloku energetycznego. Bardziej szczegółowy opis tych
rozwiązań zawarty jest w rozdziale 4 niniejszej pracy.
12
4 Nowoczesne regulatory
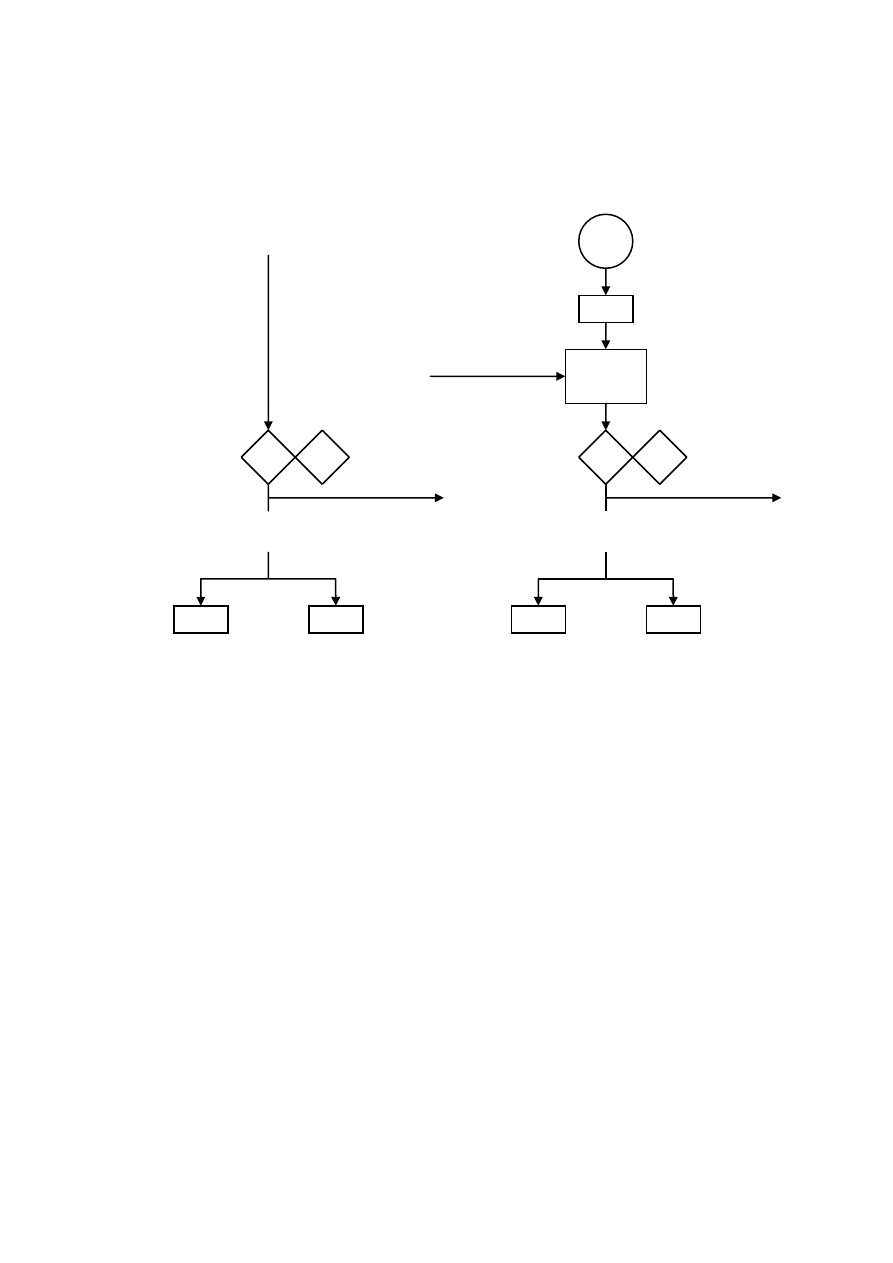
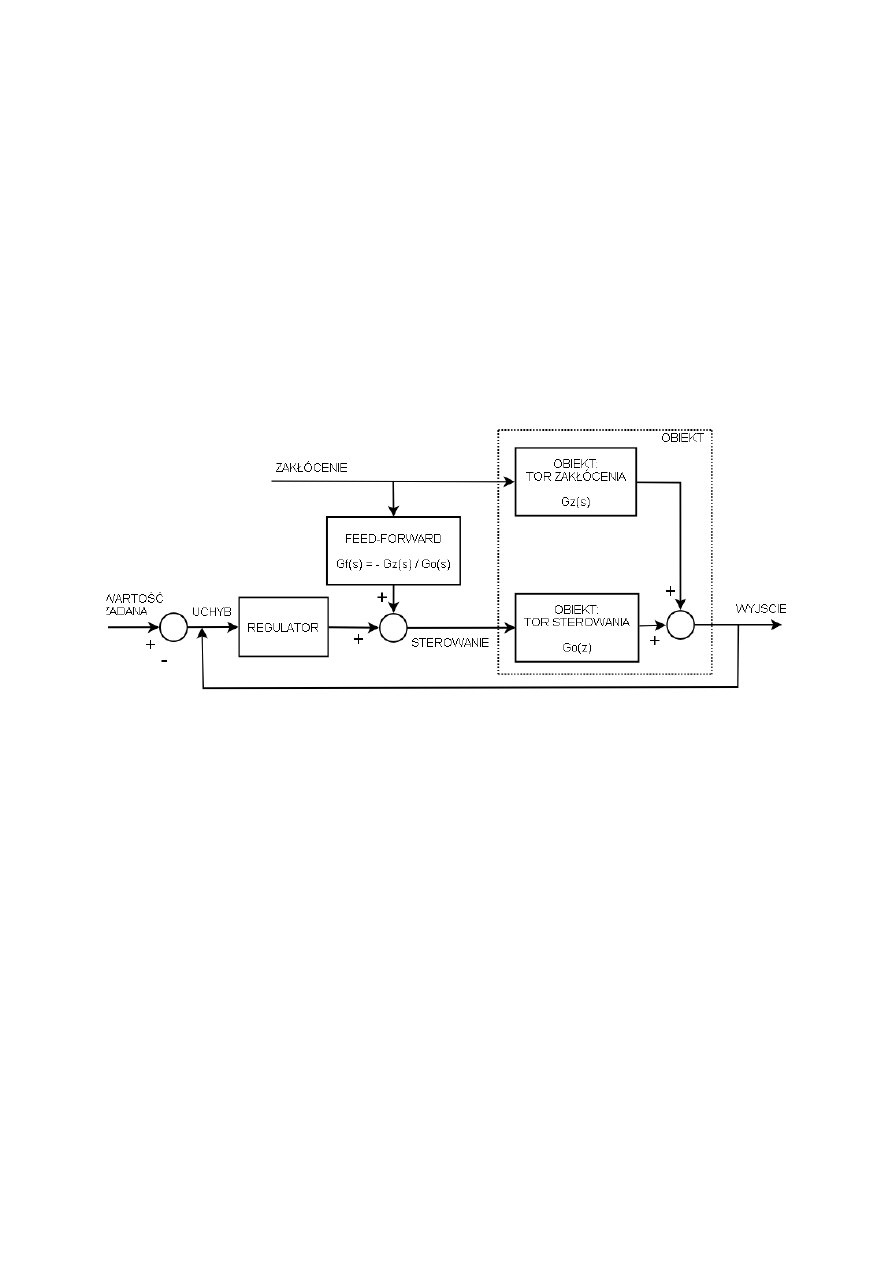
4.1 Regulacje feed-forward (FF)
W klasycznym algorytmie PID regulator zmienia sygnał sterujący reagując na zmiany
wyjścia procesu (sprzężenie zwrotne). Stąd, w przypadku pojawienia się zakłóceń, regulator
reaguje dopiero wtedy, gdy wyjście procesu odchyla się od wartości zadanej. Sprzężenie FF
umożliwia kompensację wpływu pojawiającego się zakłócenia w sytuacji, gdy może być ono
mierzone. Koncepcja układu regulacji ze „sprzężeniem w przód” polega na tym, że regulacja
feed-forward "wyprzedza" pojawienie się uchybu. Generuje ona sygnał sterujący,
"przewidujący" konieczność pojawienia się odpowiedniego uchybu. Poniżej zaprezentowano
przykładowy układ z wykorzystywaniem regulacji FF:
Aby można było zastosować sterowanie typu feed-forward:
•
opóźnienie w torze zakłóceń musi być nie mniejsze niż w torze obiektu
•
tor sterowania musi być szybszy od toru zakłóceń (stałe czasowe)
•
musi istnieć odwrotność transmitancji obiektu i transmitancja odwrotna musi
być stabilna
•
jeżeli w transmitancji członu feed-forward rząd licznika jest większy od rzędu
mianownika to ta transmitancja nie jest realizowalna (wynika to z tego, że chcemy
obliczyć wyjście na podstawie wejść, które zaistnieją dopiero w przyszłości)
4.2 Układy regulatora PID ze zmiennymi nastawami
Złe dobranie parametrów regulacji P, I, oraz D może prowadzić do niestabilności
układu regulacji. Producenci regulatorów starają się wprowadzać nastawy fabryczne
zapewniając dobrą pracę regulatorów w typowych procesach energetycznych, ale nie
wszystkie procesy wyglądają tak samo.
Obecnie punktem wyjścia dla procesu strojenia regulatora PID jest ustalenie, jak
dynamiczna będzie reakcja układu sterowania na błąd uchybu (różnicy) pomiędzy mierzoną
wartością zmienną w procesie, a zadanym sygnałem odniesienia.
13
Obciążenie (1 – 100%)
K
Wiodące
opóźnienie
P
I
D
PV SP
Output
K
Δ
∫
dt
d
f(x)
f(x)
f(x)
Jeżeli sterowany proces jest stosunkowo wolnozmienny, to parametry regulatora PID
mogą być tak dobrane, aby cały układ reagował natychmiast na wszelkie zmiany i odchylenia
regulowanej wielkości od wartości zadanej.
W przypadku, kiedy sterowany proces jest szybkozmienny i konieczne są szybkie
reakcje układu, wówczas parametry regulatora PID ustala się w ten sposób, aby działając
łagodził on skutki szybkich zmian, rozciągając korekcję w czasie. Istotą strojenia układów
pracujących w pętli jest ustalenie jak gwałtownie sterowany proces reaguje na sygnały
korekcyjne z regulatora oraz jak szybka powinna być reakcja regulatora PID na zmiany
wielkości regulowanej w celu eliminacji błędu uchybu. Wielką pomoc w dzisiejszych
regulatorach stanowią funkcje auto-dostrajania parametrów PID.
Dość popularnym już rozwiązaniem stało się budowanie struktur regulacji opartych na
regulatorach PID, których parametry P, I, D zmieniają się dynamicznie wraz ze zmianą
punktu pracy regulowanego obiektu. Na podstawie poniższego schematu regulacji, parametry
regulatora zmieniają się zgodnie z generowanymi outputami z bloków funkcyjnych f(x), na
których wejścia podany jest sygnał obciążenia bloku (LOAD) wyskalowany 0-100%.
Zmieniające się obciążenie bloku generuje poprzez f(x) konkretne wartości dla
parametrów P, I, oraz D. Sztuką w tym rozwiązaniu jest dobór optymalnych charakterystyk
f(x), dzieląc np. cały zakres obciążenia bloku na 3 punkty pracy Lmax, Lmed, Llow i dla tych
poziomów dobrać charakterystyki w sposób empiryczny, lub stosując do dobrze już utarte
zasady doboru nastaw regulatorów PID, o których mowa poniżej.
Poniżej przedstawiono mały, wycięty schemat przedstawiający układ ze zmiennymi
nastawami:
Operator wprowadzając regulator w tryb auto-tuningu tak naprawdę uruchamia jedną z
metod (lub jej modyfikację) automatycznego doboru parametrów. Klasyczna metoda doboru
nastaw Zieglera-Nicholsa zyskała na popularności wraz z pojawieniem się na rynku
sterowników z funkcjami samostrojenia. John Ziegler i Nathaniel Nichols nie wynaleźli co
prawda regulatora typu PID, jednakże opracowana przez nich prosta metoda doboru nastaw
dla regulatorów pracujących w tym algorytmie (w pętlach sprzężenia zwrotnego układów
sterowanych) przyczyniła się do ich niezwykłej popularności w tego typu zastosowaniach.
14
Metoda ta polega na wyłączeniu z procesu regulacji parametrów I oraz D i
zwiększaniu wartości Kp (parametr wzmocnienia proporcjonalnego) dopóki układ nie
osiągnie poziomu tzw. wzmocnienia Kc – krytycznego, w którym operator zaczyna
obserwować oscylację układu. Operator odmierza okres oscylacji wprowadzając zmienną Pc.
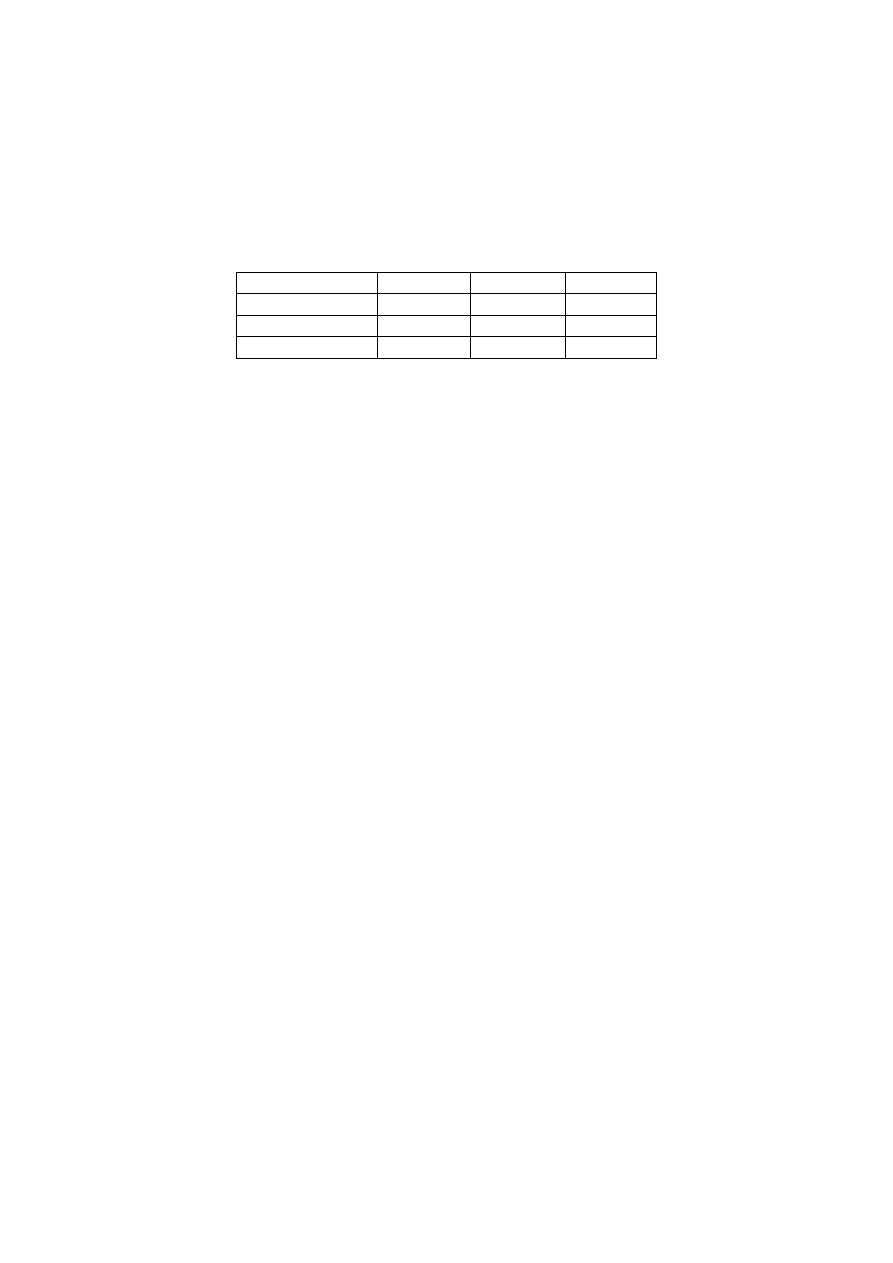
Znając wartości wzmocnienia Kc, zmiennej Pc i posługując się zależnościami z poniższej
tabeli, można obliczyć wartości nastaw dla trzech podstawowych typów regulatora (tj. P, PI
oraz PID).
Tabela nastaw regulatorów – metoda Zieglera-Nicholsa
Regulator
K
c
T
i
T
d
P
0,5∙Kc
-
-
PI
0,45∙Kc
Pc / 1.2
-
PID
0,6∙Kc
Pc / 2
Pc / 8
gdzie: T
i
– stała całkowa; T
d
– stała różniczkowania
4.3 Układy z wewnętrznym modelem
Model wewnętrzny (Internal Model) jest to neuronowy proces symulujący odpowiedź
układu regulacji w celu oceny końcowych wyników i efektów procesu sterowania. IMC
(Internal Model Control) opiera się na Zasadzie Wewnętrznego Modelu (IMP), która mówi,
że całkowita regulacja może być osiągnięta tylko wtedy, kiedy system kontroli oddaje,
bezpośrednio lub pośrednio, niektóre wyobrażenia procesu, który będzie regulowany. W
praktyce polega to na tym, że jeśli schemat regulacji został stworzony w oparciu o dokładny
model procesu, to regulacja „doskonała” jest teoretycznie możliwa. Jak widać kluczowym
elementem to efektownego sterowania, jest dogłębna znajomość i wiedza o procesie, który
zamierzamy regulować.
Sterowanie z wykorzystaniem modelu wewnętrznego nazywamy sterowaniem
predykcyjnym. Jest to metoda regulacji układami dynamicznymi (modele matematyczne),
poprzez cykliczne rozwiązywanie zadania sterowania optymalnego, z warunkiem
początkowym równym aktualnemu stanowi obiektu. Regulacja predykcyjna ma na celu
„przewidywanie” przyszłych zachowań systemu przy zadanych sterowaniach i warunkach
początkowych. W dalszej części niniejszej pracy zaprezentowano 2 modele regulacji
predykcyjnej.
4.3.1 GPC (Generalized Predictive Control)
Jednym z najpopularniejszych algorytmów predykcyjnych jest GPC. W tym
algorytmie dynamika obiektu regulacji modelowana jest w postaci dyskretnych transmitancji
definiujących zależności pomiędzy wyjściami z obiektu (CV), a jego wejściami (MV i DV).
Opis w postaci transmitancji pozwala na objęcie szerszej klasy obiektów włącznie z
obiektami niestabilnymi. Łatwo można pokazać, że przy dostatecznie wysokim rzędzie
(równym ilości współczynników w odpowiedzi skokowej) sygnału wejściowego,
transmitancja dyskretna może bezbłędnie reprezentować dowolną odpowiedź skokową. W
takim przypadku wartości współczynników w transmitancji dyskretnej są równe różnicy
kolejnych współczynników z modelu odpowiedzi skokowej.
Model w postaci równania różnicowego pozwala na odwzorowanie dowolnej
odpowiedzi skokowej w najgorszym wypadku przy użyciu liczby parametrów, takiej samej
jak model odpowiedzi skokowej.
15
W znacznej jednak większości liczba parametrów modelu w postaci transmitancji
dyskretnej może być mniejsza niż liczba współczynników odpowiedzi skokowej. Pozwala to
na inne ujęcie modelu, w formie bardziej zwięzłej i oszczędnej ze względu na zasoby
pamięci.
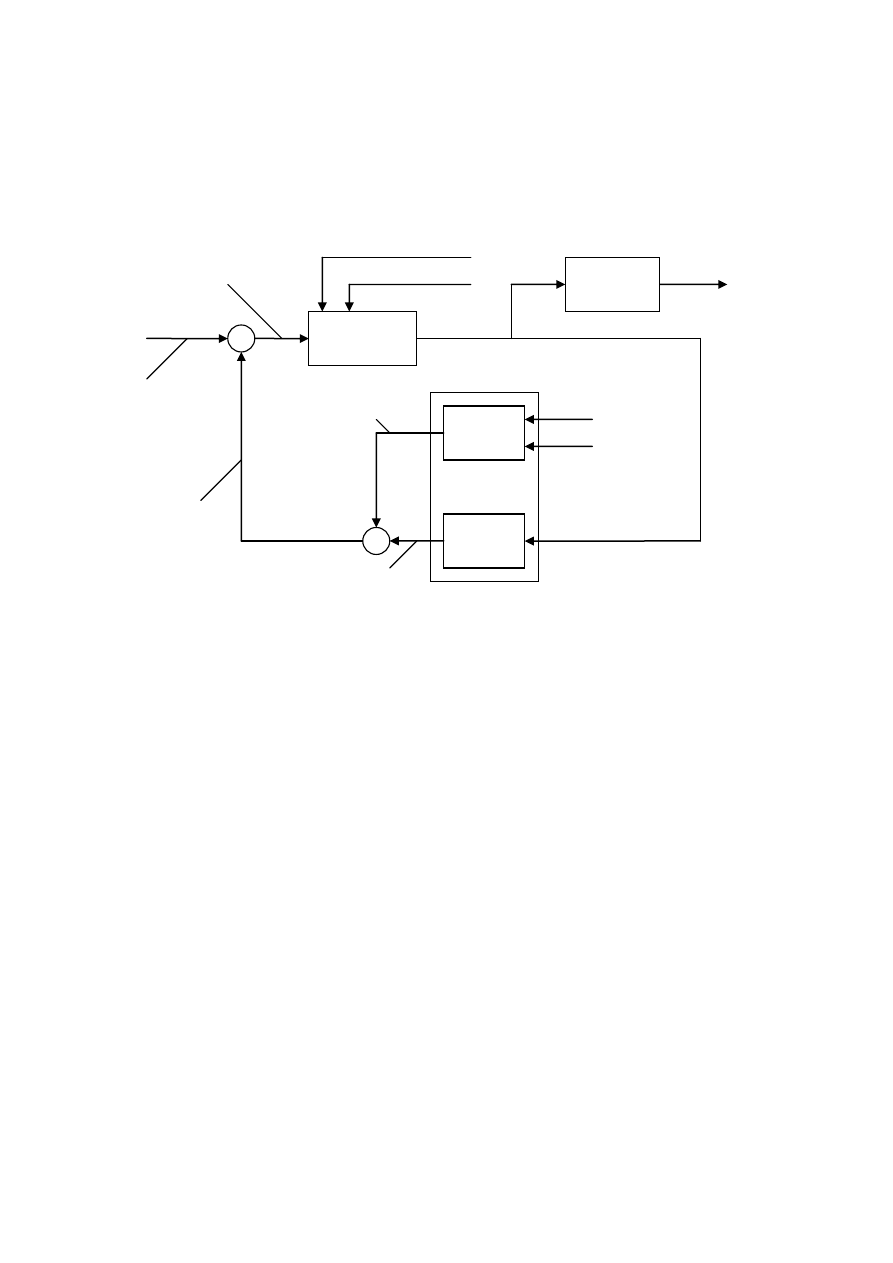
Poniżej przedstawiono podstawową strukturę GPC:
GPC należy do grupy „regulatorów predykcyjnych dalekiego zasięgu”. Generuje on
ciąg przyszłych sygnałów kontrolujących w każdym odstępie czasu, ale tylko pierwszy człon
sekwencji regulacji jest wprowadzany do wejścia układu. Prognoza wyjścia y opiera się na
dwóch różnych składnikach. Pierwszym z nich jest „Odpowiedź niewymuszona”, która
przedstawia prognozę zachowania na wyjściu y(t+i|t) (w przedziale od t+1 do t+N), w
zależności od poprzedniego wyjścia y(t-i|t) i wejścia u(t-j|t). Drugi składnik to „Odpowiedź
wymuszona” i przedstawia ona dodatkowe elementy wyjścia y, wynikające z kryterium
optymalizacji. Całkowitą prognozą jest suma obu powyższych składników.
Oprócz efektywnych parametrów regulacji, GPC cechuje się również dużą
odpornością na różnego rodzaju niepożądane sytuacje, co czyni go bardzo interesującą i
wykorzystywaną opcją regulacji w różnego rodzaju procesach, a w tym i w energetyce.
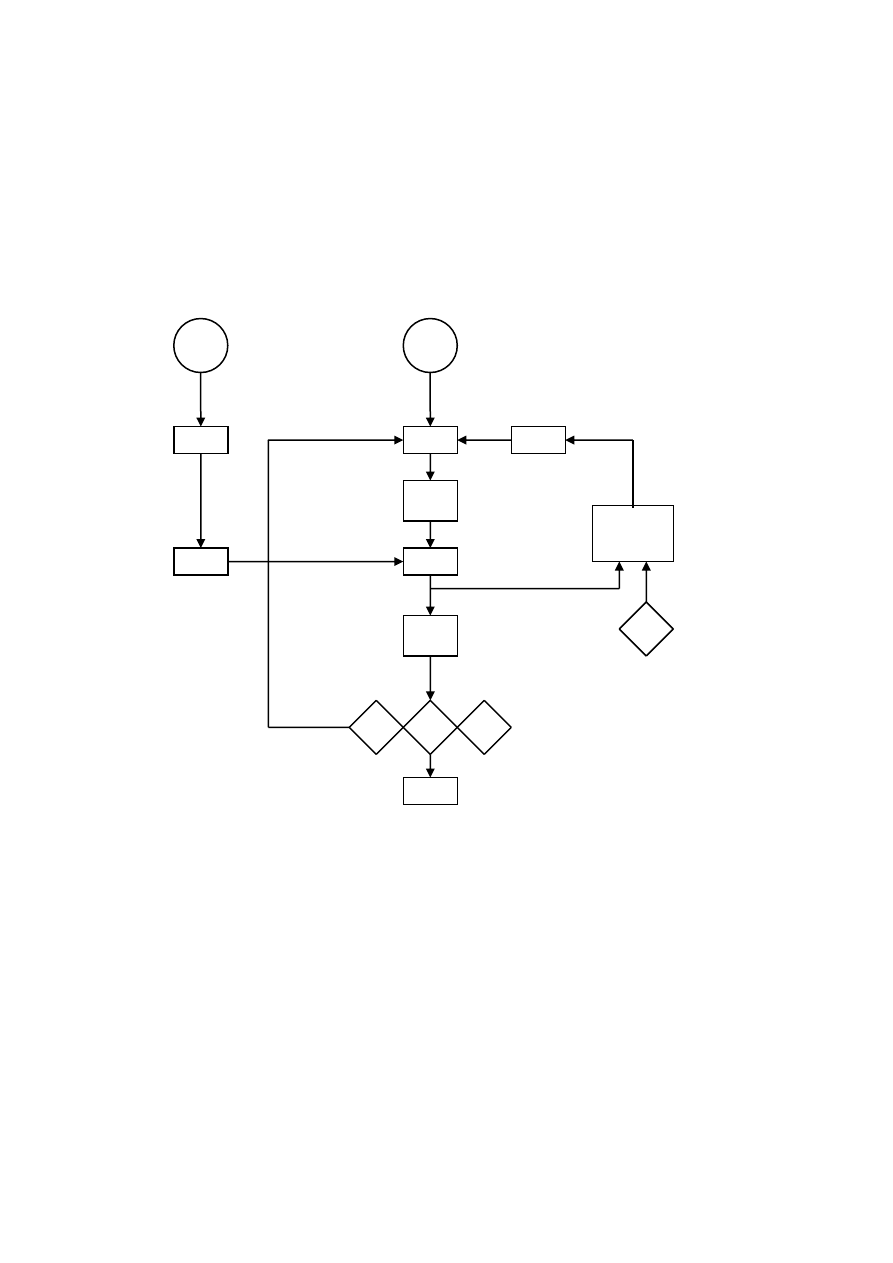
4.3.2 MPC (Model Predictive Control)
Typ regulacji MPC jest jedyną z tzw. zaawansowanych technik regulacji, których
działanie jest bardziej zaawansowane niż standardowa regulacja PID. Odniosła ona olbrzymi
sukces w aplikacjach praktycznych, wywierając dominujący wpływ zarówno na kierunek
rozwoju przemysłowych układów regulacji i sterowania, jak i prac badawczych w tym
obszarze. Algorytmy regulacji predykcyjnej MPC w sposób naturalny potrafią uwzględniać
ograniczenia zarówno sygnałów sterujących i wielkości wyjściowych decydujących często o
jakości, efektywności i bezpieczeństwie produkcji.
Funkcja kosztu
Ograniczenia
Optimizer
Przyszły błąd
Predyktor
Przyszła
wartość
odniesienia
w
-
u
Całkowita
odpowiedź
u
1
y
y
+
Odpowiedź
niewymuszona
Odpowiedź
wymuszona
Model
Model
u(t-j|t)
y(t-i|t)
Proces
16
Generują one aktualne dane sterujące, uwzględniając zarówno wspomniane
ograniczenia i (dzięki bezpośredniemu wykorzystaniu modelu) interakcje wewnętrzne w
obiekcie. W sposób naturalny można je stosować do obiektów wielowymiarowych, również
przy nierównej liczbie wejść sterujących i wielkości regulowanych.
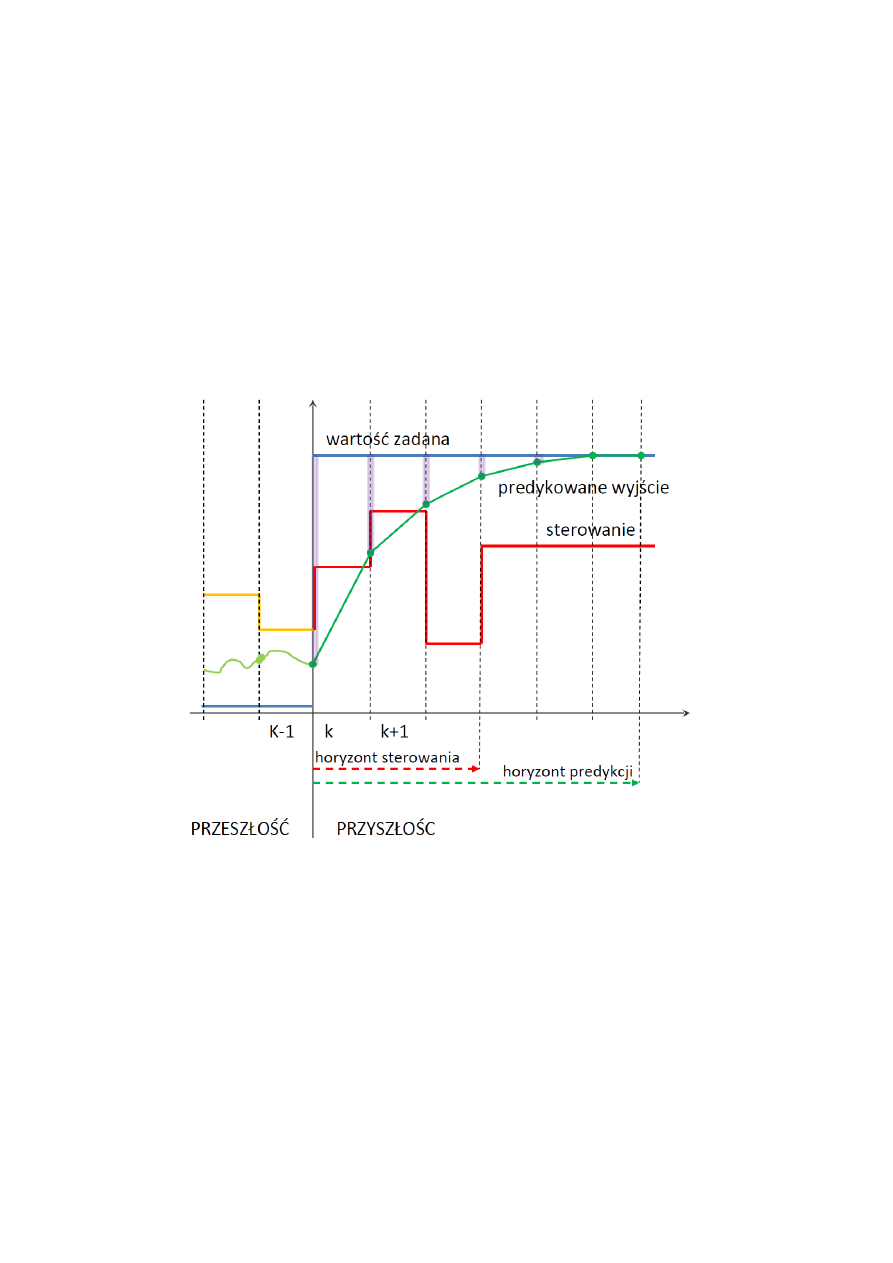
Technika MPC to metoda regulacji predykcyjnej z przesuwanym horyzontem.
Wykorzystuje ona dynamiczny model obiektu (liniowy lub nieliniowy) do wyznaczenia
trajektorii sygnałów sterujących optymalizujących wskaźnik jakości na pewnym horyzoncie
czasu. Wyznaczona przez algorytm MPC trajektoria sygnału sterującego minimalizuje różnicę
między prognozowaną (na horyzoncie predykcji) trajektorią wyjść obiektu, a znaną lub
założoną trajektorią wartości zadanych tych wyjść. Ponadto kształt trajektorii sterowania
zależy także od kary, jaką narzuci się na zmienność sygnałów sterujących.
Poniższy wykres przedstawia przyszłe wyznaczanie wartości sterowania przez
regulator predykcyjny:
Podstawowym składnikiem takiego algorytmu nie jest praktycznie sam model (choćby
nieliniowy), lecz odpowiednio dobrany algorytm optymalizacji. Szczególnie istotnym są
metody wprowadzenia ograniczeń (charakter funkcji kary) oraz jego efektywność
obliczeniowa. Praktycznie algorytm powinien zawsze zdążyć wygenerować nowe sterowanie
w trakcie trwania jednego okresu próbkowania. Właśnie te cechy spowodowały, że
dotychczas rozważane struktury nie były często stosowane praktycznie i dopiero rozwój
technik cyfrowych i obliczeniowych pozwolił na szersze upowszechnienie tych technik.
17
4.4 Modele w układach regulacji
4.4.1 Modele liniowe
Model liniowy jest szczególnym przypadkiem modeli typu ARX. Model ARX
(Autoregressive with exogenous input) jest to model autoregresywny z zewnętrznym
wejściem, będącym jednocześnie dyskretnym modelem wejściowo-wyjściowym dla procesów
stochastycznych.
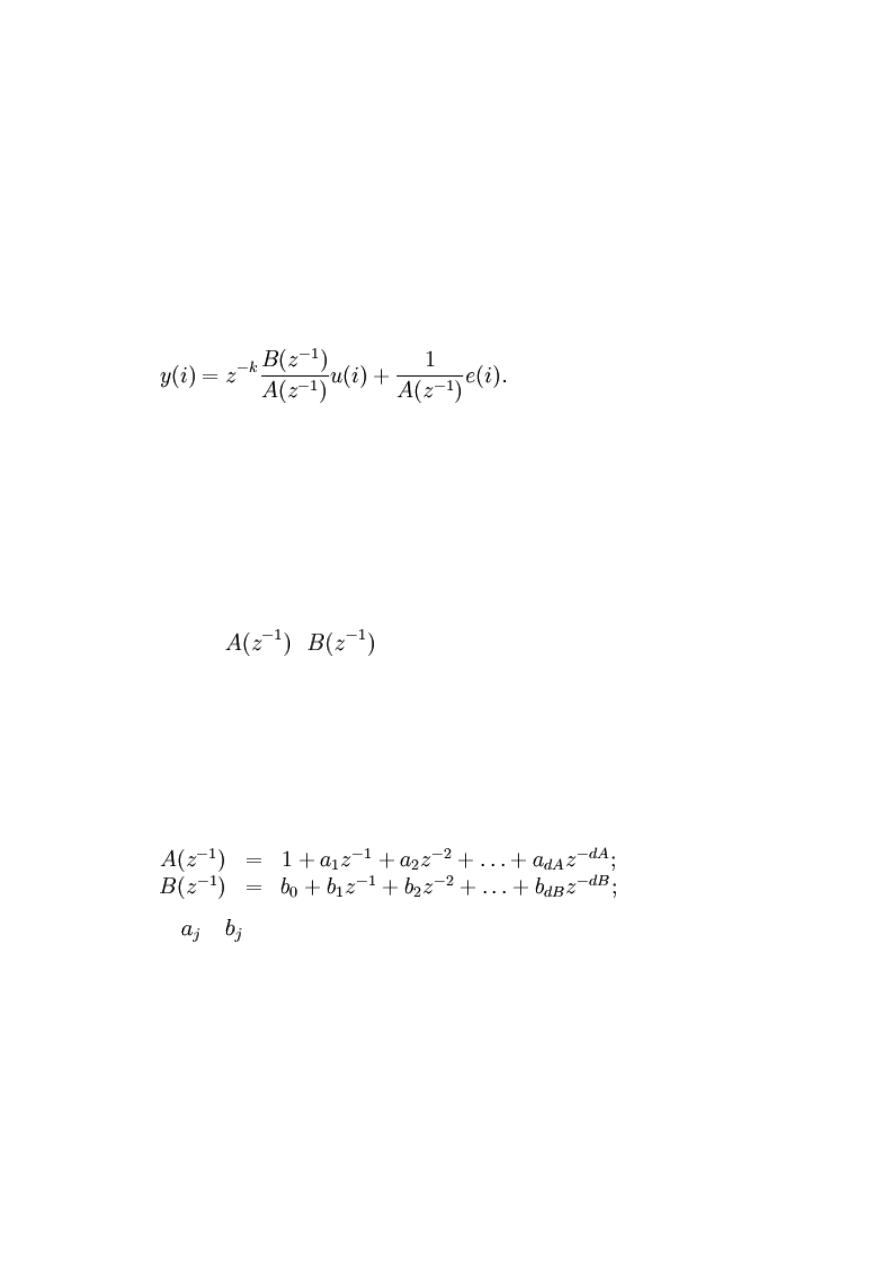
Model ten jest wyrażony wzorem:
Znaczenie poszczególnych symboli użytych w powyższym wzorze jest następująca:
symbole y(i), u(i) oraz e(i) oznaczają dyskretne ciągi wartości, a zatem ciągi wartości
równo odległych w czasie (na przykład 0; 0,5; 1; 0;-0.5; ... itd.)
y(i) jest zwany ciągiem wartości sygnału wyjściowego
u(i) jest zwany ciągiem wartości sygnału wejściowego
z
− k
oznacza opóźnienie (przesunięcie wstecz) sygnału o k wartości tak, że z
− k
u(i) =
u(i − k)
parametr k jest zwany (dyskretnym) czasem opóźnienia i przybiera wartości całkowite
większe lub równe 1
symbole
i
oznaczają wielomiany różnicowe (patrz poniżej)
pierwszy człon równania jest zwany torem sterowania,
e(i) jest zwany ciągiem wartości dyskretnego białego szumu zakłócającego obiekt - w
skrócie białym szumem
drugi człon równania, który jest zwany torem zakłócenia, modeluje wszelkie
niemierzalne zakłócenia stochastyczne działające w obiekcie w postaci białego szumu
przefiltrowanego (czyli przepuszczonego) przez odpowiednią transmitancję
Wielomiany różnicowe występujące w modelu ARX dane są wzorami:
Wartości
i
zwane są parametrami wielomianów, a wartości dA i dB stopniami
wielomianów. O wielomianie A(z
− 1
) mówi się, że jest on wielomianem monicznym, co
oznacza, że parametr a
0
tego wielomianu zawsze ma wartość równą 1.
Strukturę modelu ARX określają trzy parametry: (k, dA, dB).
W modelu liniowym zależność wielkości sterowanej od wielkości sterującej jest
określona stałym współczynnikiem proporcji z określonym kierunkiem wzmocnienia (+ / -)
oraz stałym przesunięciem (współczynnikiem k).

18
Poniżej przedstawiono przykładową strukturę modelu liniowego zastosowanego w
regulatorze dyskretnym mIVY (produkcji Transition Technologies):
………………………………..
/MVNUM 2
/OUTPUT = BDNX001 LOWER_LIMIT = 0 UPPER_LIMIT = 200
NET_MODE = 0 NET_IDX = -1 DELAY = 0 PARTITION (0)
/INPUT = BDNX001 LOWER_LIMIT = 0 UPPER_LIMIT = 200 NET_MODE
= 0 NET_IDX = -1 DELAY = 1 PARTITION (0)
/INPUT = BDNX001 LOWER_LIMIT = 0 UPPER_LIMIT = 200 NET_MODE
= 0 NET_IDX = -1 DELAY = 2 PARTITION (0)
/INPUT = O2STPIVC LOWER_LIMIT = 1.5 UPPER_LIMIT = 5 NET_MODE
= 0 NET_IDX = -1 DELAY = 9 PARTITION (0)
/INPUT = WBFIVC LOWER_LIMIT = 1.5 UPPER_LIMIT = 5 NET_MODE =
0 NET_IDX = -1 DELAY = 3 PARTITION (0)
/RULE_BASE
( 1 1 1 1 ) -> ( 1.20598 -0.308754 0.367857 -0.240124 5.81024 )
…………………………………
Poniżej przedstawiam opis powyższego zapisu:
1 Output – CV – (BDNX001) – w modelu 2-inercyjnym (dlatego BDNX001
występuje dwukrotnie również jako input)
2 Inputy – MV – (O2STPIVC) oraz (WBFIVC) z konkretnymi opóźnieniami 9 i 3
(liczone w cyklach 20 sek. regulatora, czyli opóźnienie od O2STPIVC wynosi 180
sek., zaś od WBFIVC – 60 sek. )
Odpowiedź RULE_BASE – pierwsze dwa współczynniki (1 i 2 stopień inercji), a
trzeci i czwarty współczynnik to wzmocnienia odpowiednio dla pierwszego i drugiego
inputa. Ostatnim współczynnikiem jest stała wielomianu

19
4.4.2 Sieci neuronowe
Perceptron wielowarstwowy (MLP – multilayer perceptron) jest sztuczną siecią
neuronową składającą się z M warstw. Każdy z neuronów jest prostą jednostką
przetwarzającą. Obserwuje on wartości na wejściu i dokonuje ich ważonego sumowania
wyliczając pobudzenie według wzoru:
j
k
i
k
j
k
ij
k
i
w
w
0
Generuje on na swoim wyjściu wartość określoną funkcją aktywacji i wartością pobudzenia:
)
(
k
i
k
i
g
Neurony w sieci zorganizowane są w ponumerowane warstwy w ten sposób, że wyjścia
neuronów warstwy poprzedniej są połączone z wejściami neuronów warstwy następnej:
1
k
j
k
j
Neurony pierwszej warstwy są połączone z wejściami sieci
j
j
x
0
, zaś wyjścia neuronów
warstwy ostatniej obserwowane są na wyjściu sieci:
M
i
i
y
. Ostatnia warstwa jest zwana
warstwą wyjściową, zaś pozostałe warstwami ukrytymi.
Typowo, w warstwach ukrytych przyjmuje się funkcję aktywacji:
)
tanh(
)
(
k
i
k
i
g
,
Warstwie wyjściowej - funkcję liniową:
M
i
M
i
W takim wypadku perceptron, posiadający jedną warstwę ukrytą, ma właściwość
uniwersalnej aproksymacji, czyli może zostać wykorzystany do aproksymacji z dowolnie
małym błędem dowolnego ciągłego odwzorowania R
n
R
m
, określonego na mierzalnym
podzbiorze R
n
, przyjmującego skończone wartości. Twierdzenie powyższe nie podaje liczby
neuronów w warstwie ukrytej. Liczba ta ma jednak kluczowe znaczenie ze względu na
właściwość generalizacji. Zbyt wiele neuronów ukrytych prowadzi do bardzo słabej
generalizacji, a zbyt mało natomiast uniemożliwia nauczanie sieci. Zagadnieniu określania
koniecznej liczby neuronów w warstwie ukrytej poświęcono wiele uwagi - np. twierdzenie
Wapnika-Czerwonenkisa czy prace Kuklińskiego.
Do uczenia MLP wykorzystuje się algorytm wstecznej propagacji błędu (BP - error
backpropagation). Algorytm BP służy do określania wartości pochodnych cząstkowych
funkcji błędu
k
ij
w
E
/
w warstwach ukrytych. Korzysta się z następujących wzorów,
wyznaczając pomocniczą wartość błędu
k
i
podlegającą wstecznej propagacji (stąd nazwa
algorytmu):
)
)(
(
'
M
i
i
M
i
M
i
y
g
i
k
i
k
ij
k
j
k
j
w
g
)
(
'
1
1
1
k
j
k
i
k
ij
w
E
Wyznaczone w ten sposób wartości mogą zostać wykorzystane w minimalizacji
numerycznej jedną ze znanych metod (np. metodą gradientów sprzężonych).
20
4.4.3 Układ fuzzy
Układ fuzzy jest to tzw. rozmyta sieć neuronowa FNN (Fuzzy Neural Network). Sieć
jest perceptronem wielowarstwowym zawierającym więzy z przetwarzaniem liniowym i
nieliniowym, gdzie uczone są tylko niektóre połączenia między neuronami. Logika rozmyta
jest uogólnieniem logiki klasycznej, szczególnie przydatnym przy uwzględnianiu informacji
niepewnej, nieprecyzyjnej i w inny sposób niepełnowartościowej. W modelowaniu logika
rozmyta pokazała swoją przydatność dzięki możliwości wykorzystania wiedzy jakościowej
operatorów.
Zbiór rozmyty jest uogólnieniem pojęcia zbioru. Wprowadza się funkcję
przynależności określoną dla każdego elementu, o wartościach z przedziału [0..1].
Wnioskowanie w logice rozmytej, podobnie jak w klasycznej, polega na wykorzystaniu reguł
„jeśli – to”.
W modelu z logiką rozmytą określa się dla każdej wielkości wejściowej i wyjściowej
grupę zbiorów rozmytych, zwanych wartościami lingwistycznymi. Reguły opisują
przekształcenia wielkości wejściowych i tworzenie wyjściowych. Pozyskanie reguł oraz
określenie wartości lingwistycznych dokonuje się na etapie projektowania modelu ręcznie
(np. na podstawie dialogu z operatorem) lub automatycznie.
Rozmyte sieci neuronowe stanowią atrakcyjne narzędzie automatycznego
projektowania modeli rozmytych. Korzysta się przy tym ze struktury zbliżonej do perceptronu
wielowarstwowego. Podobnie jak w MLP, wykorzystuje się algorytm wstecznej propagacji
błędu do wyznaczenia pochodnych funkcji błędu.
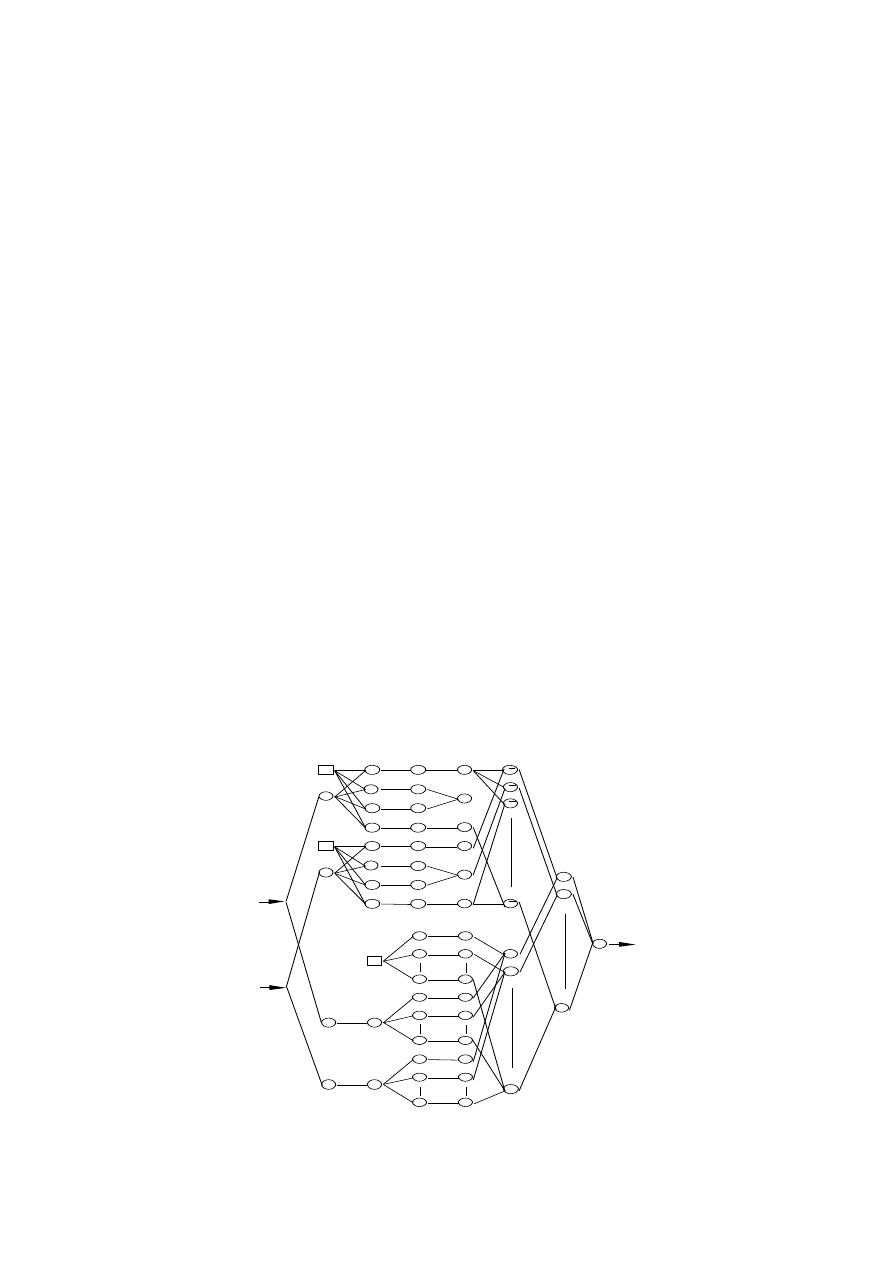
Poniżej zaprezentowana będzie jedna z rozmytych sieci neuronowych, zaproponowana
przez Horikawę. Najbardziej adekwatne i obiecujące rozwiązanie modelowania dynamiki to
podejście Takagi-Sugeno:
Jeśli x
1
jest A
1
i ... x
N
jest A
N
to
N
N
x
a
K
x
a
a
y
1
1
0
Na rysunku poniżej został przedstawiony schemat sieci dla modelu o dwóch wejściach
rozmytych z trzema wartościami lingwistycznymi:
x
1
x
2
y
(F)
(G)
(H)
(I)
(J)
(K)
(L)
1
1
1
w
a
w
s
1
w
a
w
s
1
w
a
K O
N K L U Z J E
(A)
(B)
(C)
(D)
(E)
P R Z E S Ł A N K I
1
1
w
g
w
c
1
1
-1
1
1
1
w
g
w
c
1
1
-1
1
1

21
5 Optymalizacja
Optymalizacja jest to metoda wyznaczania najlepszego (optymalnego) rozwiązania z
punktu widzenia określonego kryterium. W energetyce jest ona bardzo istotnym elementem,
gdyż jest stosowana we wszystkich procesach energetycznych. Każdy blok energetyczny
składa się z wielu mniejszych i większych urządzeń, które ze sobą ściśle współpracują. W
rozdziale 1 zostały zaprezentowane regulatory bloku energetycznego. Celem optymalizacji
bloku jest takie zaprogramowanie tych regulatorów, aby pracowały one na najbardziej
optymalnych parametrach. W urządzeniach energetycznych wiąże się to z funkcjonowaniem
z największą sprawnością oraz szybką możliwością regulacji (np. regulacja prędkości
podajników węgla do młynów). Wraz z rozwojem technologicznym, rozwijają się również
metody regulacji, przez co sam proces optymalizacji staje się bardziej efektywny. W dalszej
części zostanie przedstawiony przykład optymalizacji metodą SILO procesu spalania w kotle.
Optymalizacja Procesu Spalania w powyższej metodzie jest systemem sterowania
zainspirowanym działaniem układu odpornościowego organizmów żywych
.
Optymalizator
immunologiczny jest zaprojektowany tak, aby zapewnić jak najlepszy „wskaźnik jakości”,
dlatego też minimalizuje on odchyłki od optymalnych parametrów. Aby osiągnąć ten cel
system wyszukuje „limfocyty”, które poprzednio prezentowały najwyższą skuteczność w
walce ze zbliżonymi „patogenami” (zakłóceniami) i symptomami spowodowanymi przez te
patogeny. Kiedy system znajdzie grupę limfocytów najlepiej pasujących do zadania, buduje
model matematyczny oparty na tych limfocytach. Model ten zawiera informacje o
przeciwciałach (wartościach sygnałów sterujących), które maja najwyższą skuteczność w
walce z patogenami (zakłócenia typu zmiana obciążenia kotła, zmiana konfiguracji młynów
węglowych itp.). Optymalne wartości sygnałów sterujących są wyliczane na podstawie
zaimplementowanego modelu matematycznego (co 12 minut). Sterowania te minimalizują
odchyłki od optymalnych wartości ważnych punktów procesowych (temperatura pary, emisja
CO i NOx).
W systemie SILO, będącym Sztucznym Systemem Immunologicznym, patogeny
reprezentowane są przez zakłócenia oddziaływujące na proces. Zmiana zakłócenia (np.
zmiana obciążenia bloku) oznacza atak nowego patogenu. W przypadku pojawienia się
patogenu, system SILO poszukuje limfocytów typu B, które byłyby by w stanie wygenerować
zestaw skutecznych przeciwciał, zdolnych do walki z patogenem. Przeciwciało
reprezentowane jest przez wektor przyrostów sterowań x stanowiący rozwiązanie zadania
optymalizacji w danym kroku optymalizacji. System SILO składa się z dwóch głównych
modułów: modułu uczącego i modułu optymalizacji. Moduły te pracują niezależnie. Moduł
uczący analizuje na bieżąco wartości punktów procesowych. Jego zadaniem jest rejestrowanie
statycznych odpowiedzi procesu na zmianę sterowania. W tym celu moduł uczący poszukuje
w danych historycznych „okien czasowych”, w których nastąpiła zmiana sterowania i
zakłócenia oddziaływujące na proces znajdowały się na stałym poziomie (z dokładnością do
szumów pomiarowych i oscylacji wynikających z niedostatecznego zestrojenia
podstawowego układu regulacji). W przypadku odnalezienia takiego okna czasowego moduł
uczący tworzy limfocyt typu B, w którym zapisuje informacje o:
średnich wartościach sygnałów sterujących przed zmiana sterowania
średnich wartościach sygnałów sterujących po zmianie sterowania
średnich wartościach sygnałów wyjściowych przed zmiana sterowania
średnich wartościach sygnałów wyjściowych po zmianie sterowania
średnich wartościach sygnałów zakłócenia w całym oknie czasowym
22
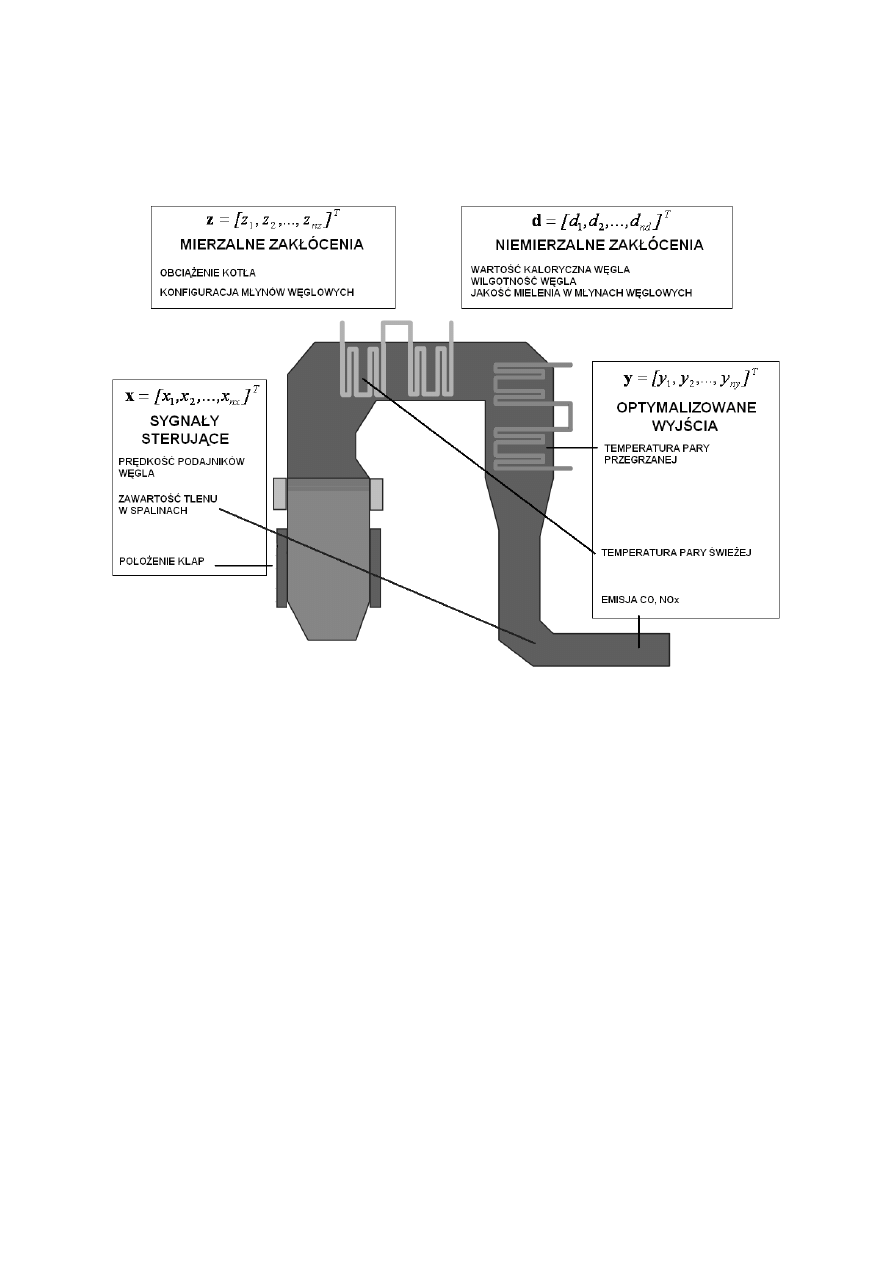
Poniżej przedstawiono schematyczne przedstawienie przykładowych sygnałów kotła,
z punktu widzenia optymalizacji procesu spalania:
Porównując system SILO z metodami opartymi na regulacji predykcyjnej należy
podkreślić brak konieczności przeprowadzania czasochłonnych testów obiektu w przypadku
wdrożenia systemu SILO. Dzięki temu:
Koszt wdrożenia systemu SILO jest mniejszy od regulacji predykcyjnej
Nie powoduje się nieefektownej pracy obiektu podczas testów
System SILO może uwzględnić większą liczbę konfiguracji pracy bloku. Linearyzacja
obiektu wykonywana jest w ściślejszym sąsiedztwie aktualnego punktu pracy (węższe
zakresy mocy, konfiguracja pracujących młynów węglowych, poziom emisji CO)
System SILO posiada również skuteczny mechanizm zdobywania wiedzy o procesie i
adaptacji do zmian obiektu. Mechanizm ten inspirowany jest działaniem układu
odpornościowego organizmów żywych. Należy jednak pamiętać, że system SILO
realizuje optymalizacje statyczną. Nie posiada on dynamicznego modelu obiektu,
przez co może być stosowany do optymalizacji procesów, w których główne
zakłócenia oddziaływujące na obiekt zmieniają się szybko ale rzadko lub zmiana
zachodzi w sposób ciągły, ale prędkość tych zmian jest zdecydowanie mniejsza w
porównaniu do stałych czasowych dynamiki obiektu. Z tego powodu system SILO nie
powinien być stosowany w elektrowniach szczytowych.

23
Bibliografia
[1]
K. Wojdan, praca doktorska: System optymalizacji bieżącej punktu pracy procesów
technologicznych inspirowany działaniem układu immunologicznego, Wydział
Elektroniki i Technik Informacyjnych, Politechnika Warszawska, 2008
[2]
P. Domański, K. Świrski, J. Lewandowski, Wykorzystanie sieci neuronowych i
optymalizacji w energetyce: porównanie doświadczeń Polska i USA, Praca IMiUE
Politechniki Śląskiej, IX Konferencja Kotłowa, 2002
[3]
K. Świrski, wykłady: Rozproszone Systemy Sterowania w Energetyce, Zakład Maszyn
i Urządzeń Energetycznych, Instytut Techniki Cieplnej, Wydział Mechaniczny
Energetyki i Lotnictwa, Politechnika Warszawska, 2010
[4]
S. Plamowski, rozprawa doktorska, Wydział Elektroniki i Technik Informacyjnych,
Politechnika Warszawska, 2006
[5]
R. Kennel, A. Linder, M. Linke, Generalized Predictive Control (GPC) – Ready for
Use in Drive Applications?, University of Wuppertal, Germany
[6]
S. G. Dukelow, The Control of Boilers, 2
nd
Edition
[7]
D. Laudyn, M. Pawlik, F. Strzelczyk, Elektrownie, wydanie 6, WNT, Warszawa, 2010
[8]
Ł. Stec, Regulatory PID (proporcjonalno-całkująco-różniczkujące) w sterownikach
PLC,
Biuletyn Automatyki nr 8, Kraków, 1996
Wyszukiwarka
Podobne podstrony:
ITIL Podstawy W2 Budowa i optymalizacja procesów i serwisów ITIL
karta inf praca przejściowa projekt
Dietetyka Istota procesów energetycznych i gospodarki wodnej AHE Pielęgniarstwo
Praca Przejściowa-1, Pomoce Naukowe 2, SEMESTR 6, technologia referat, technologia -projekt
Praca przejściowa
Bezpieczeństwo i optymalizacja procesów realizowanych drogą elektroniczną
PRACA PRZEJŚCIOWA Robotyzacja w przemyśle
Praca przejściowa
PRACA PRZEJŚCIOWA Moja
Systemy informatyczne w biznesie, Praca przejściowa
PRACA PRZEJŚCIOWA PORADNIK, 6 OPRACOWYWANIE TREŚCI PRACY PRZEJŚCIOWEJ, OPRACOWYWANIE TREŚCI PRACY PR
Spis treści, Politechnika Lubelska, Studia, Studia, wszystkie, Praca przejsciowa
Mikroprocesory, moje 19, ZASTOSOWANIE CHRONOMETRAŻOWO - TABELARYCZNYCH METOD OCENY OBCIĄŻENIA P
Akumpresura, AKUPRESURA, AKUPRESURA /masaż punktowy/ polega na udrażnianiu kanałów energetycznych po
Procesy energetyczne na poziomie komórkowym stud
Praca przejściowa
Praca+przejsciowa+wzor+v1 1, IMIR, I stopień, 6 semestr, Praca
13M3 zagadnienia zima2012, Semestr V PK, Semestr Zimowy V (2013-2014), Podstawy inżynierii procesowe
więcej podobnych podstron