1.Metody modelowania konstrukcji inżynierskich
Układy dyskretne – odpowiedź układu może być opisana przez
skończoną liczbę zmiennych stanu. Równania równowagi
formułujemy dla poszczególnych stopni swobody. W wyniku
przyjętej analizy opisu otrzymujemy algebraiczny układ równań.
Układy ciągłe – opisujemy przy pomocy równań różniczkowych
(lub całkowych). Rozwiązanie dokładne równań różniczkowych
przy zadanych warunkach brzegowych jest możliwe tylko dla
niewielu przypadków szczególnych. Z reguły do rozwiązania
zadań praktyki inżynierskiej stosować musimy procedury
numeryczne. Procedury te w istocie swojej wymagają
przedstawienia układu ciągłego za pomocą idealizacji
dyskretnej.
2.Podać kroki analizy układów dyskretnych
- idealizacja układu – układ przedstawiamy jako zespół
elementów
- równowaga elementów – formułujemy wymagane warunki
równowagi poszczególnych elementów w opisie zmiennych
stanu
- składanie elementów – rozpatrujemy oddziaływania pomiędzy
elementami w celu ustalenia (zapisania) układów równań z
niewiadomymi zmiennymi stanu
- wyznaczenie odpowiedzi – rozwiązujemy układ równań czyli
wyznaczamy nieznane zmienne opisujące stan układu a
następnie obliczamy odpowiedź każdego elementu
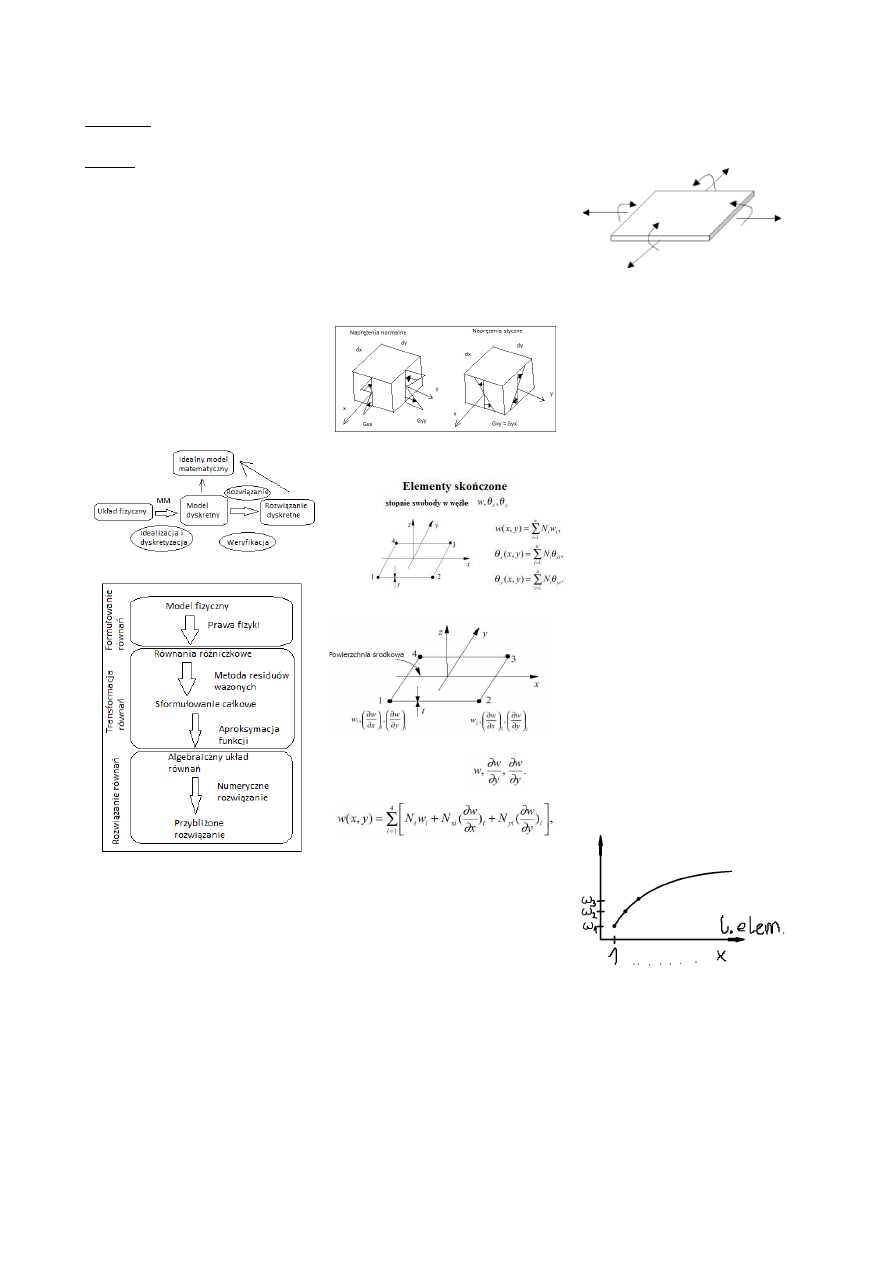
3.Omówić schematy budowy modelu dyskretnego
-schemat z modelu matematycznego
Przyjmujemy dowolny układ fizyczny w którym wykonujemy
idealizacje i dyskretyzacje, po czym za pomocą modeli
matematycznych otrzymujemy układ dyskretny. Po rozwiązaniu
modelu dyskretnego otrzymujemy rozwiązanie dyskretne czyli
idealny model matematyczny
-schemat modelu fizycznego
4.Idea metody elementów skończonych
Metoda rozwiązywania układów równań różniczkowych,
opierająca się na podziale dziedziny (dyskretyzacja) na
skończone elementy, dla których rozwiązanie jest przybliżane,
przez konkretne funkcje i przeprowadzenie obliczeń tylko dla
węzłów tego podziału.
5.Metody modelowania obiektów inżynierskich za pomocą
MES
- metoda residuów ważonych – metoda Galerkina – Polega na
przybliżonym znajdowaniu rozwiązań równań różniczkowych.
Startuje ona od równania różniczkowego problemu. Jest
najczęściej wykorzystywana gdy nie można podać zasady
wariacyjnej np. gdy równanie różniczkowe jest rzędu
nieparzystego
- funkcjonał wariacyjny problemu – metoda Rayleigha – Ritza
6.Od czego zależy dokładność MES
Dokładność metody MES jest tym większa, im:
- złożone funkcje dokładniej opisują rzeczywisty rozkład pola
elementu
- podział na elementy jest bardziej gęsty (ten warunek nie jest
wystarczający, kluczowy jest dobór funkcji interpolacyjnych
opisujących stan odkształcenia elementu w zależności od
wartości przemieszczeń węzłowych. Są to funkcje kształtu)
7.Co to są funkcje kształtu
Są to funkcje interpolacyjne opisujące stan odkształcenia w
zależności od wartości przemieszczeń węzłowych.
Maja gwarantować:
- ciągłość wewnątrz elementu
- zgodność na granicy podziału w elementach sąsiednich
- zapewnić możliwość dążenia wartości f-cji rozwiązującej do
pewniej stałej
8.ZAŁOŻENIA MODELU PŁYTOWEGO – PODAĆ
SKŁADOWE NAPRĘŻEŃ UOGÓLNIONYCH.
- płaska płaszczyzna
- obciążenie prostopadłe do powierzchni płyty
- dominujący wpływ zginania
- ugięcie płyty jest małe w porównaniu z grubością
- płaszczyzna środkowa zmienia się w powierzchnię środkową
bez zmiany długości elementów i kątów między nimi
Naprężenia
uogólnione:
9.Omówić element płytowy
Elementy skończone
Element
4-
węzłowy
Stopnie swobody w węźle
Funkcje kształtu dla elementu:
10.CO
OZNACZA
TERMIN
„PŁYTA
Ś
REDNIEJ
GRUBOŚCI”
Płytą o średniej grubości nazywamy ciało trójwymiarowe, które
w
stanie
nieodkształconym
ograniczone
jest
dwiema
równoległymi płaszczyznami leżącymi blisko siebie i dowolną
powierzchnią w kierunku prostopadłym do tych płaszczyzn.
Wymiar grubości tego ciała jest mały w stosunku do
pozostałych wymiarów i wszystkie obciążenia działają
prostopadle
do
płaszczyzny
ś
rodkowej.
Teoria płyt średniej grubości (Mindlina): t/L>1/10 odrzuca
hipotezę:
„Proste
prostopadłe
do
płaszczyzny
ś
rodkowej
w
nieodkształconej płycie, zostają po jej odkształceniu proste i
prostopadłe do powierzchni środkowej.” Wystąpi więc
odkształcenie
postaciowe:
γ
xz
≠
0,
γ
yz
≠
0.
11.Na czy polega i jakie s warunki stosowania opcji redukcji
siłą przy podporach (nad słupami i ścianami) przy analizie
ustrojów płytowych z wykorzystaniem programu robot?
Redukcja wartości przy podporach polega na zastąpieniu
wartości wynikowych w okolicach podpór, słupów i ścian
wartością zredukowaną z otoczenia tych podpór. Może być
stosowana dla elementów płytowych i powłokowych, które są
podparte punktowo lub opcja działa poprawnie, gdy wymiary
przekroju poprzecznego słupa (podpory) są porównywalne z
rozmiarami siatki powierzchniowych elementów skończonych;
w przypadku, gdy wymiary słupa są dużo większe od rozmiarów
siatki
ES
zaleca
się
zdefiniowanie
innych
podpór
bezwymiarowych wokół podpory z wymiarem lub połączeń
sztywnych.
12.Omówić element powłokowy
Występują w niej siły membranowe oraz momentowe
Element powłokowy jest złożeniem elementu płytowego i
płaskiego stanu naprężenia.
Element powłokowy posiada 6 stopni swobody: 3 przesuwy plus
3 obroty względem osi x,y,z.
13.Omówić równanie ruchu.
Równanie ruchu da dynamicznego
zagadnienia
Mq
Cq
Kq
Q
+
+
=
&&
&
Gdzie:
M – macierz bezwładności o wymiarze
n n
×
C – macierz tłumienia o wymiarze
n n
×
K – macierz sztywności o wymiarze
n n
×
q – wektor uogólnionych przemieszczeń
1
n
×
Q – wektor uogólnionych sił wymuszających
1
n
×
n – liczba stopni swobody dynamicznej
14. Omówić zagadnienie własne w dynamice.
Zagadnienie własne, postać ogólna
chyba:
0
Mq
Cq
Kq
+
+
=
&&
&
Chodzi o to, że
zawsze równe jest zero. W wykładach było to konkretnie
napisane:
0
b
≡
Zagadnienie własne, jako problem
matematyczny, jest to rozwiązanie liniowego jednorodnego
układu równań postaci:
(
)
0
A
I
x
λ
− ⋅ ⋅ =
Gdzie:
A, I – macierze
N
N
×
x – wektor o wymiarze N
Analiza zagadnienia własnego służy do:
- opisu drgań swobodnych konstrukcji;
- problemu rezonansu;
- wykonania analizy modalnej (pozwala nam na to znajomość
form i częstości własnych, które wyliczamy chyba z zagadnień
własnych);
- możemy wyciągnąć wiele wniosków dotyczących zachowania
się konstrukcji pod wpływem obciążeń o charakterze
harmonicznym ( z widma częstości drgań własnych).
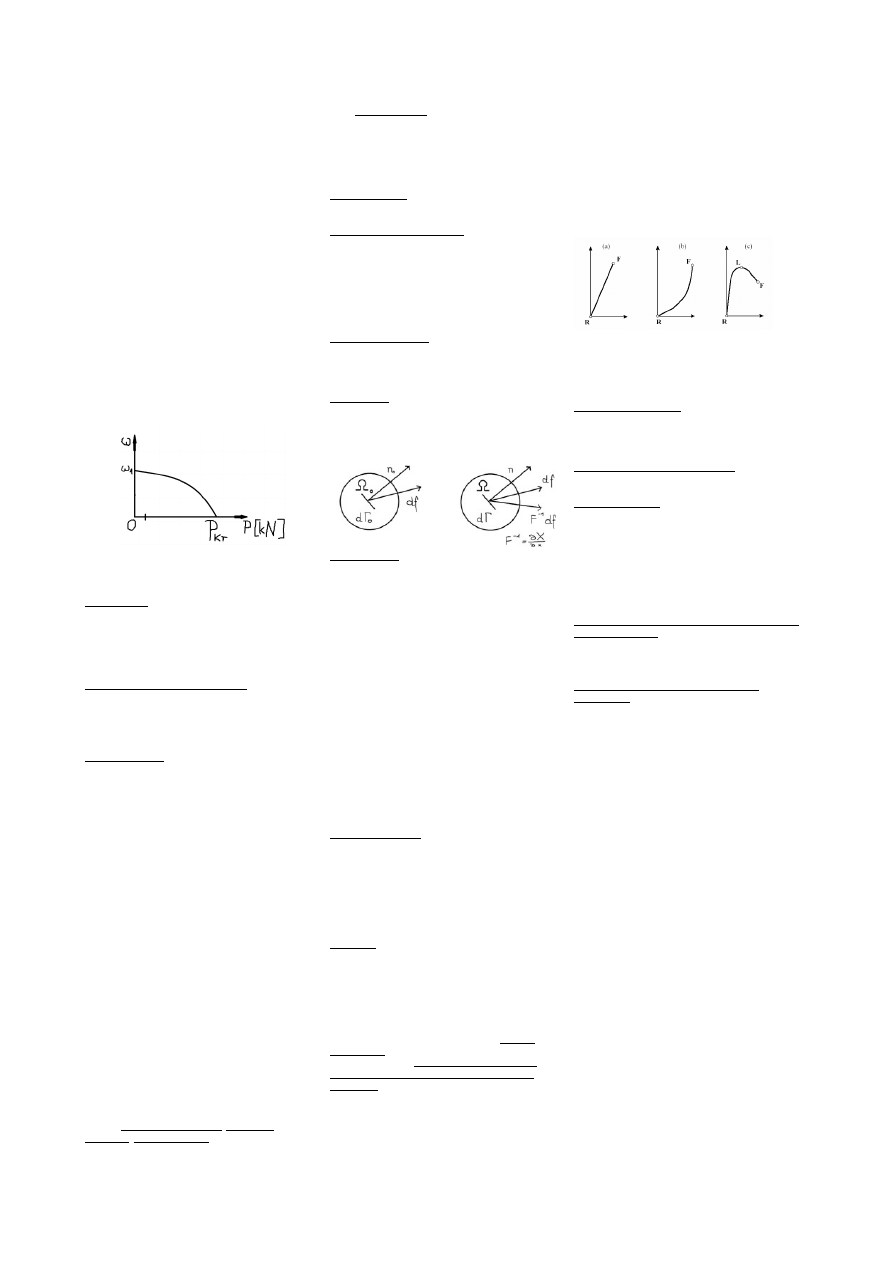
15. Jaki wpływ na obliczaną pierwszą częstotliwość drgań
własnych ma zwiększenie liczby stopni swobody/zagęszczenie
siatki MES. Odpowiedź zilustruj odpowiednim
wykresem:
Wraz z zagęszczaniem siatki MES (dodawaniu stopni swobody)
częstotliwość drgań własnych dąży do stałej liczby.
16. Od czego zależy liczba możliwych do obliczenia wartości
I postaci drgań własnych:
Liczba drgań własnych zależy od ilości mas skupionych (w
programie robot masy przykładane są w węzłach, wiec od
węzłów) oraz od warunków podparcia ustroju (od SSD – liczby
stopni swobody dynamicznej), odpowiednie zamocowanie może
zablokować możliwość przesuwu masy, a co za tym idzie
ograniczyć liczbę postaci.
N-stopni swobody oznacza ze jest N drgań.
A wartość zależy od parametrów geometrycznych i fizycznych
np. EJ.
18. Na czym polega całkowanie bezpośrednie równań ruchu.
W metodach bezpośredniego całkowania równanie ruchu jest
całkowane krok po kroku. Termin "całkowanie bezpośrednie"
oznacza, że równanie to nie jest przekształcane do innej postaci
(w odróżnieniu od metody superpozycji modalnej). Istotą
metody całkowania bezpośredniego jest założenie, że równanie
ruchu ma być spełnione w wybranych chwilach t, a nie w całym
przedziale całkowania oraz założenie o charakterze zmienności
przemieszczeń, prędkości i przyspieszeń pomiędzy tymi
chwilami. Metody całkowania bezpośredniego opierają się na
następujących założeniach:
Przedział czasu dzielimy na odcinki
t
∆
- z reguły odcinki stałe
Równanie ruchu jest spełnione na granicach tych odcinków,
czyli w punktach
t
k
t
= ⋅ ∆
(k=1,2,3,…)
Zakłada się określoną zmienność: przemieszczenia, prędkości i
przyśpieszenia na odcinkach czasu
(
1)
,
k
t k
t
< − ⋅ ∆ ⋅ ∆ >
19. Omów wpływ obciążenia na częstotliwości własne.
Obciążenia wpływają na charakterystykę modalną obiektu.
Generalnie, obciążenia ściskające zmniejszają częstotliwości
rezonansowe, a obciążenia rozciągające zwiększają je.
Wpływ zwiększania siły ściskającej na częstotliwość.
20. Podaj i omów trzy rodzaje obliczeń dynamicznych
możliwych do przeprowadzenia w programie ROBOT.
Analiza modalna Podczas analizy modalnej konstrukcji
wyznaczane są wszystkie podstawowe wielkości opisujące
postaci drgań własnych konstrukcji. Liczba postaci
wyznaczanych w trakcie analizy może być definiowana przez
użytkownika lub można ją określić poprzez podanie zakresu
wartości niektórych wielkości opisujących drgania własne
konstrukcji.
Analiza czasowa (całkowanie równań ruchu) Całkowanie
równań ruchu jest to analiza pozwalająca otrzymać odpowiedź
konstrukcji w wybranych punktach czasowych na zadane
wymuszenia w czasie (w przeciwieństwie do innych typów
analiz dostępnych w ROBOCIE, które dają odpowiedź w formie
amplitud wyłącznie w jednej, ustalonej chwili).
Analiza harmoniczna Użytkownik powinien zdefiniować
geometrię konstrukcji i jej obciążenia jak dla przypadku statyki
liniowej. Przyłożone siły są w analizie harmonicznej
interpretowane jako amplitudy sił wymuszających. Ich częstość,
kąt fazowy oraz okres są definiowane przez użytkownika.
22. Podać zagadnienia, w których należy zastosować
nieliniową analizę.
Analizę nieliniową stosuje się w celu osiągnięcia dokładnych
(lepiej oddających rzeczywistość) wyników. Stosuje się ją
przede wszystkim jeśli:
- w konstrukcji znajdują się elementy nieliniowe (kable,
podpory jednostronne, plastyczność materiałów)
- uwzględnia się efekty drugiego rzędu, tzn. zmianę sztywności
na zginanie w zależności od sił podłużnych
- deformacje są duże i mają wpływ na wartość sił wewnętrznych
(P-Delta)
23.Podstawy analizy nieliniowej
Przyczyny nieliniowości:
- geometryczne – wynikające z uwzględnienia konfiguracji
początkowej i końcowej, z uwzględnienia deformacji;
- fizyczne – ze względu na przyjęty materiał ( nieliniowość stali
czy betonu)
- uwzględnienie tarcia
- uwzględnienie zmieniających się warunków brzegowych
24. Omówić cechy analizy nieliniowej
Cechy nieliniowej analizy
- Zasada superpozycji nie obowiązuje
- Historia obciążenia wpływa na odpowiedź
- Wpływ stanu początkowego konstrukcji
- Analiza dla poszczególnych kroków czasowych
25. Typy nieliniowości
-Gładkie: Nieliniowość geometryczna, Nieliniowość
materiałowa, Obciążenie śledzące - obciążenia zawsze
prostopadłe do aktualnej powierzchni ciała
-Ostre:Więzy jednostronne - punkt materialny może znajdować
się na płaszczyźnie lub nad nią, to płaszczyzna ta będzie
stanowiła dla tego punktu więzy jednostronne f(x,y,z)
≥
0)
26. Nieliniowość geometryczna
Rodzaj nieliniowości gładkiej.
Ź
ródła nieliniowości:
- duże przemieszczenia, duże gradienty przemieszczeń,
- duże odkształcenia.
W przypadku dużych przemieszczeń:
- obciążenie zachowawcze (potencjalne): nie zmienia swojej
wielkości i orientacji na wskutek przemieszczeń konstrukcji,
- obciążenie niezachowawcze (nie konserwatywne): zmienia
swoją orientacje w zależności od przemieszczeń konstrukcji, np.
obciążenie śledzące, zawsze prostopadłe do aktualnej
powierzchni ciała
27. Nieliniowość materiałowa
Rodzaj nieliniowości gładkiej.
Nieliniowości materiałowe:
- plastyczność, uszkodzenie materiału i mechanizmy zniszczenia
- zależność właściwości materiałów od temperatury, zmiennych
stanu oraz zmiennych zależnych od rozwiązań
28. Podać miary naprężeń i odkształceń
Miary naprężeń:
a)Naprężenia fizyczne σ (Cauchy stress)
b)Naprężenia nominalne P ( first Piola-Kirchhoff stress)
c)Naprężenia drugiego stopnia S (secondo Piola-Kirchhoff
stress)
Miary odkształceń:
a)Tensor odkształceń inżynierskich P e
o
= (l-l
0
)/l
o
b)Tensor odkształceń Greena (Greena- Lagrangea)
∈
= 0.5*(l
2
-
l
0
2
)/l
o
2
c)Tensor odkształceń Almansiego A
∈
al
= 0.5*(l
2
-l
0
2
)/l
2
d)Tensor odkształceń logarytmicznych
e)Tensor prędkości odkształcenia
29. Co to są równania konstytutywne
Równania konstytutywne są związkami materiałowymi,
definiującymi materiał.
W procesach (zagadnieniach) mechanicznych takimi związkami
są zależności pomiędzy tensorem naprężenia a miarami
deformacji (odkształcenia). W szczególności prawo Hooke’a
jest związkiem konstytuowanym ciał liniowo sprężystych.
Ogólna charakterystyka równań konstytuowanych:
•
nie wynikają z ogólnych zasad, zachowania termodynamiki,
•
mają charakter postulatywny
•
nie ma uniwersalnych zasad konstruowania równań
konstytutywnych
•
teoria równań konstytutywnych jest w ciągłym rozwoju i jest
uzupełniana w miarę rozwoju inżynierii materiałowej oraz
bazy doświadczalnej.
Równania konstytutywne:
•
prawo Hooke’a σ = Eε
•
prawo Clapeyrona p = Rρθ
•
prawo dla naprężeń dyssypacyjnych(ciecz Newtona)
ττττ
ij
=
µµµµ
V
i;j
30. Rozwiązywanie równań nieliniowych
Rozwiązywanie przeprowadza się w oparciu o metody
omówione w punkcie 33 i 34
31. Omówić zagadnienie plastyczności.
Plastyczność - zdolność do ulegania nieodwracalnym
odkształceniom powstającym na skutek działania na ciało
stałych naprężeń mechanicznych, przekraczających zakres, w
którym jest ono zdolne do odkształceń sprężystych i
jednocześnie na tyle małe, że nie powodują zniszczenia
ciągłości jego struktury.
Naprężenie przy którym rozpoczyna się proces plastyczny
nazywane jest granicą plastyczności.
Dla złożonego stanu naprężenia niezbędne jest kryterium
uplastycznienia (umożliwia określenie czy materiał przekroczył
granicę plastyczności). Geometrycznym przedstawieniem
opisującego kryterium uplastycznienia jest powierzchnia
plastyczności. Najczęściej stosowane warunki określające
kryterium uplastycznienia:
Tresca, Hubera–von Mises, Mohr-Coulomb, Drucker-Prager
32. Co to jest ścieżka równowagi
Ś
cieżka równowagi – krzywa obrazująca model zachowania
konstrukcji ( do stanu utraty stateczności).
W teorii stateczności wyróżnia się dwa typy utraty stateczności
(czyli obciążeń wywołujących te stany): utrata stateczności
przez osiągnięcie punktu granicznego (maksimum obciążenia) i
utrata stateczności przez wyboczenie bi-furkacyjne.
33. Metody rozwiązywania równań nieliniowych.
- metoda Newtona – Raphsona
-zmodyfikowana metoda Newtona- Raphsona
-metoda Quasi-Newton
34. Podać różnice między metodą newtona-raphsona,
zmodyfikowaną metodą newtona-raphsona a quasi-newtona.
Metoda Newtona – Raphsona
Dla typowych zadań jest metodą najszybciej zbieżną przy
spełnieniu warunków :
– właściwie dobrany punkt początkowy (startu)
– macierz styczna nie jest osobliwa w obszarze iteracji
Metoda zmodyfikowana Newtona-Raphsona jest zazwyczaj
szybsza od metody
Newtona-Raphsona bez modyfikacji.
Metoda Quasi-Newtona - algorytm:
– start jak dla metody NR,
– dla kolejnych punktów iteracyjnych wyznacza się macierz
lokalnie sieczną
Metoda Quasi-Newtona może być używana, gdy obliczenie
Hessianu (macierzy drugich pochodnych funkcji) wymaganego
przez metodę Newtona jest trudne lub czasochłonne. Idea
metody polega na przybliżeniu Hessianu lub jego odwrotności
za pomocą pierwszych pochodnych.
35. Metody rozwiązywania zadań dynamik
- zagadnienia dynamiczne liniowe (drgania liniowe) M,C,K są
to stałe niezależne od,q
)
(t
b
q
K
q
C
q
M
=
⋅
+
⋅
+
⋅
•
•
•
- zagadnienia dynamiczne liniowe (drgania liniowe
parametryczne)
M(t),C(t),K(t) są jawnymi funkcjami czasu, niezależne od q
)
(
)
(
)
(
)
(
t
b
q
t
K
q
t
C
q
t
M
=
⋅
+
⋅
+
⋅
•
•
•
- zagadnienia nieliniowe-drgania nieliniowe M,C,K zależą od
czasu t, ,q
)
,
,
(
)
,
(
)
,
,
(
)
,
,
(
t
q
q
b
q
t
q
q
K
q
t
q
q
C
q
t
q
q
M
•
•
•
•
•
•
•
=
⋅
+
⋅
+
⋅
Zagadnienie własne: b=0
0
=
⋅
+
⋅
+
⋅
•
•
•
q
K
q
C
q
M
o
- Normowanie wektora własnego
o
- Metoda Rayleigha-Ritza
- Zagadnienia dynamiczne nieustalone:
Problem rozwiązania równania:
b
q
K
q
C
q
M
=
⋅
+
⋅
+
⋅
•
•
•
Mamy dwa sposoby rozwiązania:
- poprzez całkowanie numeryczne
- poprzez analizę modalną
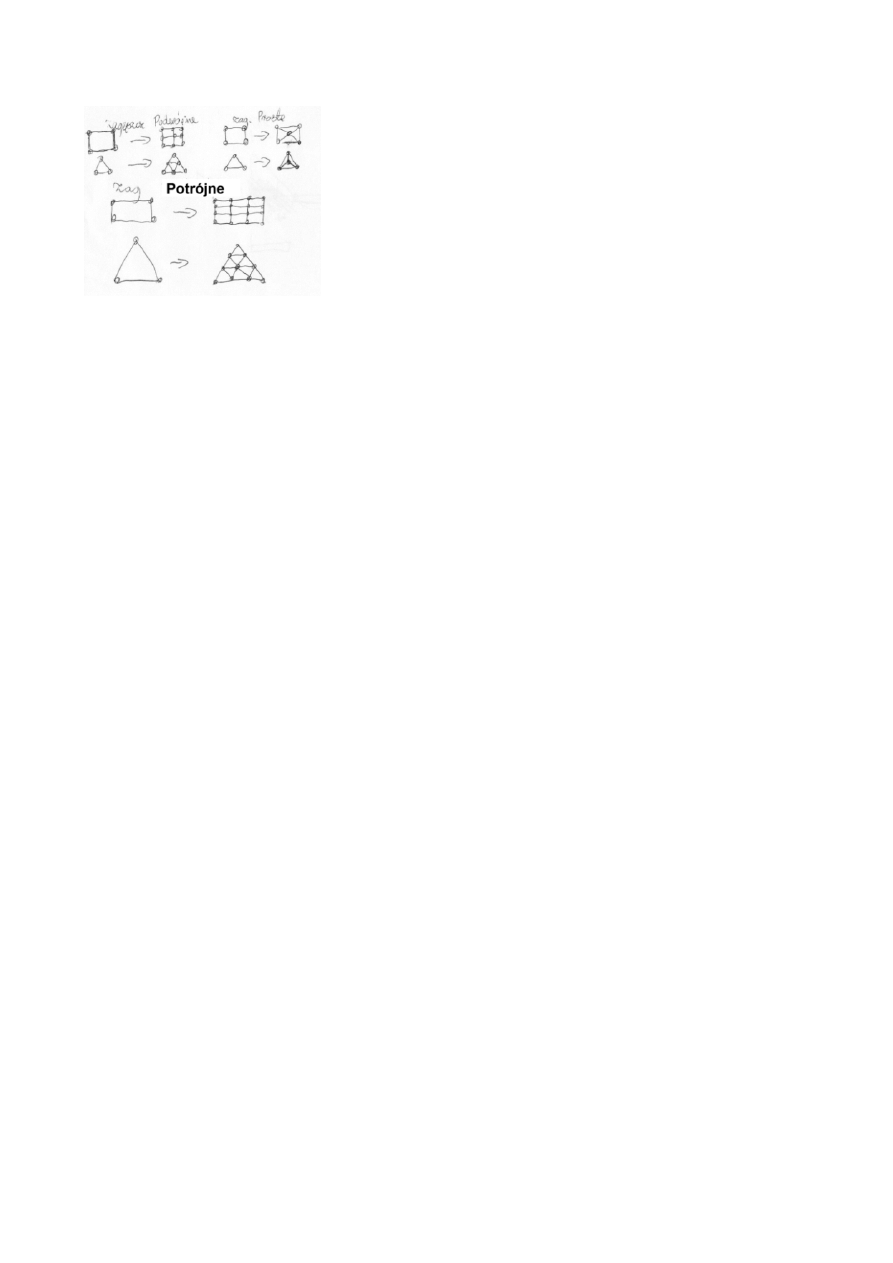
36. Narysuj efekt zagęszczenia siatki przy użyciu różnych
typów zagęszczeń.
Wyszukiwarka
Podobne podstrony:
Mala chirurgia wersja ostateczna druk id 27811
metro sciaga id 296943 Nieznany
OKB SCIAGA id 334551 Nieznany
MiTE wykL,ad 7 8 wersja 01 id 3 Nieznany
Polaczenia sciaga id 364018 Nieznany
hydro sciaga id 207638 Nieznany
atomatyka sciaga id 71799 Nieznany (2)
meply sciaga id 293325 Nieznany
Bezpieczenstwo sciaga id 83454 Nieznany (2)
Administracja sciaga2 id 51742 Nieznany (2)
logistyka sciaga 2 id 272634 Nieznany
antropo egzamin sciaga id 65818 Nieznany (2)
PBM sciaga 2 id 351741 Nieznany
IJIOS SCIAGa id 210567 Nieznany
fiza sciaga id 173913 Nieznany
Angielski sciaga id 64028 Nieznany (2)
Jakas sciaga id 224856 Nieznany
więcej podobnych podstron