
ANALIZA NIEPEWNOŚCI POMIAROWYCH W PIGUŁCE
Praca w laboratorium polega na wykonywaniu pomiarów wielkości fizycznych. Pomiary te
mogą być wykonane tylko z pewnym stopniem dokładności. To ograniczenie wynika z:
- niedoskonałości przyrządów użytych podczas pomiaru
- skończonej precyzji narządów zmysłów obserwatora.
Te wszystkie czynniki składają się na to, że każdy, nawet najbardziej precyzyjnie wykonany
pomiar obarczony jest niepewnością pomiarową (czasem używany jest termin: błąd
pomiarowy) i stanowi przybliżenie wartości rzeczywistej. Jedynym sensownym sposobem
zapisu wartości x wielkości mierzonej jest:
(wartość wielkości mierzonej
± niepewność pomiarowa) jednostka
Oznacza to, że
- wartość rzeczywista wielkości mierzonej znajduje się w przedziale równym
podwojonej wartości niepewności pomiarowej, często z założonym z góry
prawdopodobieństwem
- niepewności pomiarowe wyrażone są w tych samych jednostkach co wynik
pomiarowy
- w takim zapisie jest to całkowita niepewność pomiarowa.
I Rodzaje niepewności pomiarowych.
Rozróżniamy dwa rodzaje niepewności:
1. systematyczne - związane głównie z ograniczeniami aparatury i niedoskonałością
obserwatora
2. przypadkowe - występuje rozrzut statystyczny wyników i w kolejnych pomiarach nie
uzyskuje się identycznych wyników.
1.1 Niepewności systematyczne przyrządów:
∆
d
x
- wynika ze skończonego odstępu sąsiednich kresek podziałki na skali przyrządu
np. przy skali milimetrowej
∆
d
x
. = 1mm. W przypadkach, kiedy odstępy pomiędzy
kolejnymi kreskami podziałki są duże, można przyjąć, że
∆
d
x
jest równa ½ lub nawet ¼
najmniejszej działki
∆
k
x
- dokładność wzorcowania fabrycznego przyrządu czyli klasa przyrządu
zdefiniowana :
∆
k
x =
( )
100
zakres
k
klasa
×
.
Oznacza to, że dla miernika klasy k=1.5, o
zakresie do 2A,
∆
k
x=
0.03 A . Ta wartość jest stała dla całego zakresu pomiarowego i
stąd zalecenie takiego wyboru zakresu miernika analogowego (wskazówkowego), aby
mierzona wartość była większa niż połowa zakresu (wtedy niepewność względna jest
mniejsza).
Tak, więc maksymalna niepewność systematyczna jest równa:
∆x
s
=
∆
d
x +
∆
k
x
W każdym doświadczeniu należy wstępnie oszacować wielkość poszczególnych niepewności
i te, które są małe w porównaniu z innymi można zaniedbać.
Niepewności systematyczne można zmniejszyć stosując doskonalsze przyrządy i wykonując
pomiary bardzo starannie, ale nie można ich całkowicie wyeliminować.
I Pracownia Fizyczna IF UJ Marta Zimnal-Starnawska
1
2.1 Niepewności przypadkowe w pomiarach bezpośrednich
Przy wykonywaniu dużej liczby pomiarów tej samej wielkości fizycznej otrzymujemy różne
wyniki. Niektóre z nich powtarzają się z różną częstością. Za częstość występowania wyniku
o wartości
x
i
przyjmujemy stosunek
n
i
/n
, gdzie
n
i
jest liczbą pomiarów dających wynik
x
i
, a
n
całkowitą liczbą pomiarów. Na ogół zależność
n
i
/n
od
x
i
, przy dużej liczbie pomiarów
n
(
), jest określona rozkładem Gaussa, zwanym również rozkładem normalnym (rys.1).
Biorąc pod uwagę rozważania teoretyczne własności funkcji Gaussa [1,2,4] oraz fakt, że w
praktyce laboratoryjnej wykonujemy zawsze skończona liczbę pomiarów można pokazać, że
parametry rozkładu Gaussa charakteryzującego dany pomiar można jedynie estymować. I tak:
∞
→
n
- wielkością najbardziej prawdopodobną (najbardziej zbliżoną do wartości rzeczywistej)
dla skończonej liczby pomiarów jest ich średnia arytmetyczna
x
(estymacja maksimum
rozkładu Gaussa):
∑
=
=
n
i
i
x
n
x
1
1
- niepewnością pojedynczego pomiaru , tzw. odchyleniem standardowym
pojedynczego pomiaru, jest wartość wyrażenia podanego wzorem:
i
x
(
)
∑
=
−
−
=
n
i
i
x
x
x
n
S
1
2
1
1
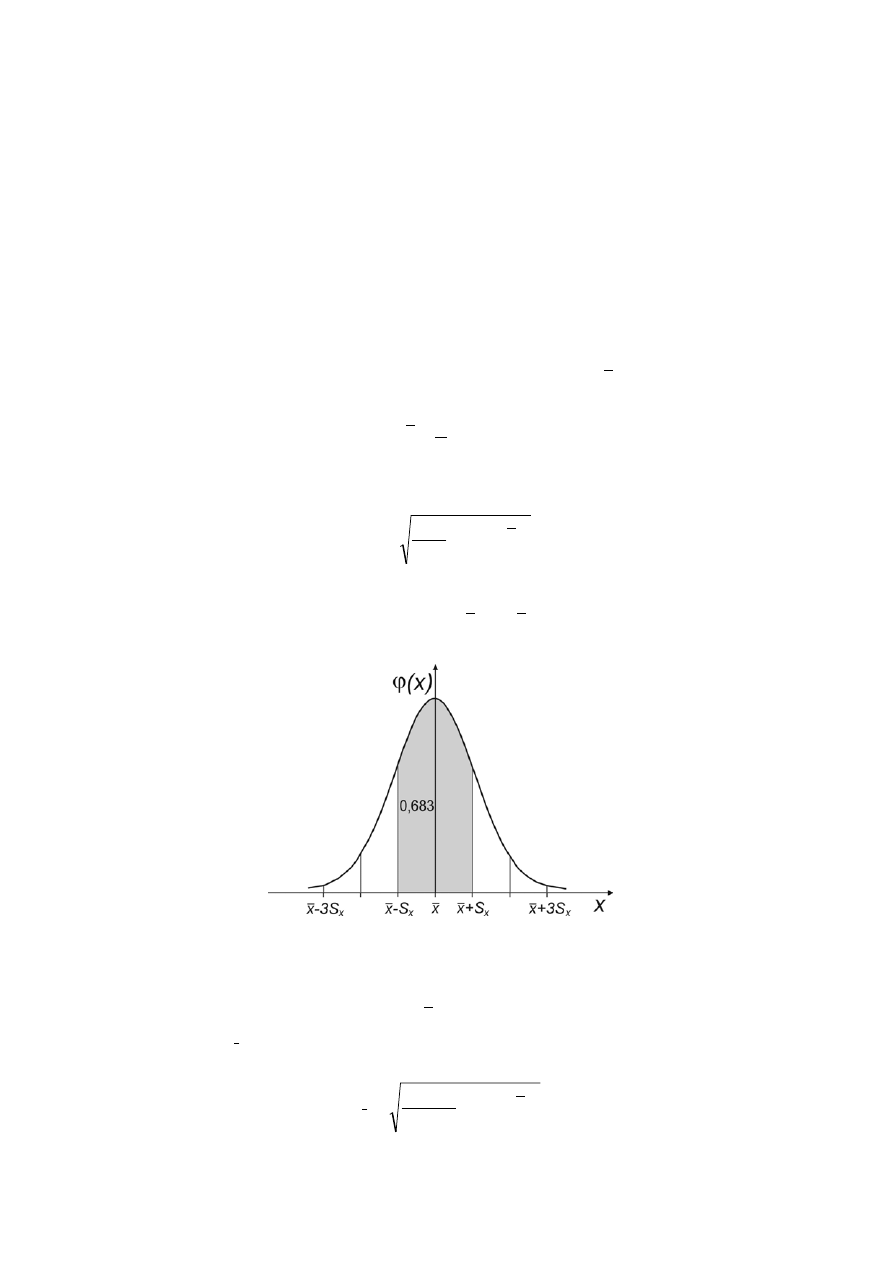
Wyrażenie to stanowi estymację „szerokości” rozkładu Gaussa (rys.1). Oznacza to, że
wykonanie kolejnych, pojedynczych pomiarów dostarczy nam wartości, które będą mieścić
się z prawdopodobieństwem 0.683 w przedziale (
x
x
S
x
S
x
+
− ,
).
Rys.1 Interpretacja graficzna odchylenia standardowego w
rozkładzie normalnym (Gaussa)
- niepewnością wartości średniej (
x
) jest odchylenie standardowe średniej
arytmetycznej
x
S
(
)
(
)
∑
=
−
−
=
n
i
i
x
x
x
n
n
S
1
2
1
1
I Pracownia Fizyczna IF UJ Marta Zimnal-Starnawska
2
Tak obliczone odchylenie standardowe
x
S interpretujemy następująco: wykonując kolejną
serię n pomiarów i obliczając
x
,
możemy tę wartość znaleźć w przedziale
〉
+
−
〈
x
x
S
x
S
x
,
z
prawdopodobieństwem 0,683. Interpretacja taka jest równoznaczna ze stwierdzeniem, że
wartość rzeczywista mierzonej wielkości mieści się we wspomnianym przedziale właśnie z
prawdopodobieństwem 0.683.
Wartości
i
x
S
x
S
zależą od liczby pomiarów i maleją wraz z rosnącą ich liczbą. Można
jednak pokazać, że wzrost liczby pomiarów od dziesięciu do kilkudziesięciu tylko w
niewielkim stopniu wpływa na wartość niepewności. Istotną zmianę w wartościach
niepewności otrzymamy dopiero powyżej stu pomiarów. W laboratorium wykonuje się
zazwyczaj serie pomiarowe składające się z około10 pomiarów, ale w przypadku liczby
pomiarów mniejszej niż dziesięć,
x
S
daje zaniżoną wartość niepewności. Chcąc otrzymać jej
poprawną wartość, należy
x
S
pomnożyć przez tzw. współczynnik rozkładu Studenta-Fishera
t
n
α
. Współczynnik t
n
α
zależy od liczby pomiarów
n oraz przyjętego poziomu ufności
α, a
jego wartość można znaleźć w odpowiednich tablicach. Poziom ufności
α to
prawdopodobieństwo, z jakim wyznaczony przedział
〉
+
−
〈
α
α
n
x
n
x
t
S
x
t
S
x
,
zawiera wartość
rzeczywistą mierzonej wielkości. W laboratorium studenckim przyjmuje się zazwyczaj
poziom ufności 0.95.
Obliczona w powyższy sposób niepewność przypadkowa stanowi niepewność bezwzględną i
nie daje wyczerpującej informacji o wartości wyniku pomiarowego. Należy obliczyć
niepewność względną, zdefiniowaną jako stosunek niepewności bezwzględnej i wartości
średniej.
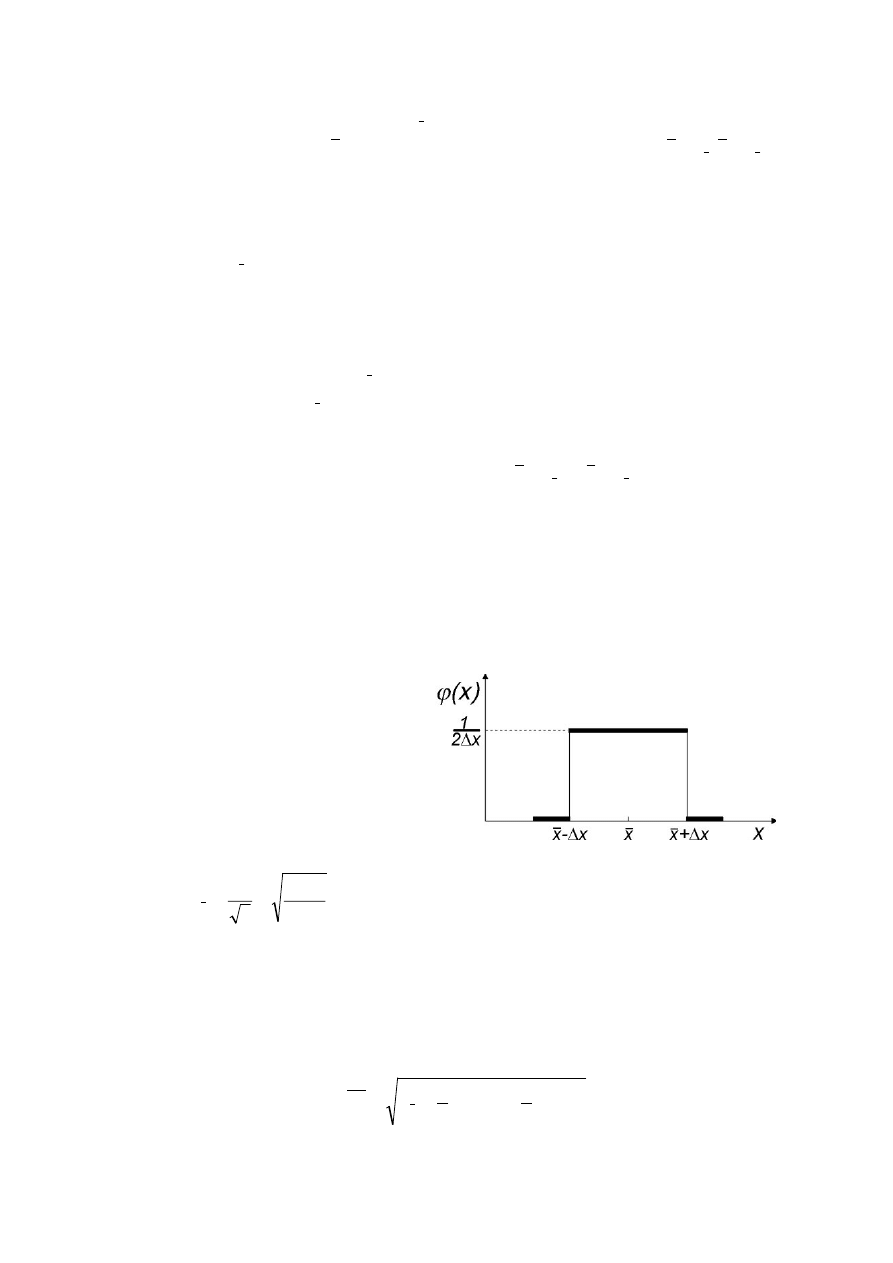
Maksymalna niepewność systematyczna
∆x
oznacza przedział
(x-
∆x , x+∆x ),
w którym z prawdopodobieństwem P=1
mieszczą się wszystkie wyniki. Można to
potraktować statystycznie i przedstawić w
przybliżeniu jako rozkład jednostajny,
prostokątny (rys.2).
Odchylenie standardowe dla takiego
rozkładu wynosi:
( )
3
3
2
x
x
S
x
∆
=
∆
=
Rys.2 Rozkład prostokątny jako przybliżenie
niepewności maksymalnej
To przybliżenie stosuje się dla niepewności systematycznych przyrządów (
∆
d
x,
∆
k
x).
Całkowita niepewność pomiarowa
Całkowita niepewność pomiarowa przy pomiarach bezpośrednich zawiera zarówno
niepewności przypadkowe, jak również niepewności systematyczne. Najczęściej stosuje się
wzór (pierwiastek z sumy kwadratów wszystkich niepewności pomiarowych):
(
)
( )
2
2
2
3
1
3
1
x
x
S
S
k
d
x
x
∆
+
∆
+
=
I Pracownia Fizyczna IF UJ Marta Zimnal-Starnawska
3
Oczywiście można zaniedbać składniki, które są małe w porównaniu z innymi i wtedy wzór
ulega uproszczeniu.
Można określić maksymalną niepewność pomiarową
∆x
max
, która jest równa sumie
całkowitej niepewności systematycznej oraz maksymalnej niepewności przypadkowej:
x
s
S
x
x
3
max
+
∆
=
∆
Czynnik 3 określa poziom ufności
α=0,99.
2.2 Niepewności w pomiarach pośrednich
W laboratorium najczęściej wyznaczamy wielkości fizyczne, których nie można zmierzyć w
sposób bezpośredni za pomocą przyrządów, ale znany jest przepis funkcyjny
(
)
n
x
x
x
f
z
,.....
,
2
1
=
wiążący wielkość z (pomiar pośredni) z innymi wielkościami x
1
, x
2
,...x
n
mierzonymi
bezpośrednio. W tym wypadku wykonujemy pomiary wielkości mierzonych bezpośrednio i
stosując wyżej podane reguły oceniamy ich niepewności całkowite. Wynik końcowy
obliczamy ze wzoru:
(
)
n
x
x
x
f
z
,...
,
2
1
=
i jest to wielkość najbardziej prawdopodobna. Natomiast miarą niepewności jest
odchylenie standardowe pomiaru pośredniego
lub inaczej błąd średni kwadratowy:
2
2
2
2
1
.....
2
1
∂
∂
+
+
∂
∂
+
∂
∂
=
n
x
n
x
x
z
S
x
f
S
x
f
S
x
f
S
gdzie
i
x
f
∂
∂
oznacza pochodną cząstkową funkcji z względem zmiennej x
i .
Czasem jednak wielkości pośrednie x
i
nie są mierzone wielokrotnie i w tym przypadku nie
obliczamy odchylenia standardowego pomiaru pośredniego, a tylko niepewność
maksymalną:
n
n
x
x
f
x
x
f
x
x
f
z
∆
∂
∂
+
+
∆
∂
∂
+
∆
∂
∂
=
∆
....
2
2
1
1
max
gdzie
∆
x
n
oznacza niepewność maksymalną wielkości x
n
mierzonych bezpośrednio.
II Zapis wyników pomiarów
W wyniku pomiaru powinna być zapisana jego wartość, niepewność pomiarowa i
jednostka:
D = (36,43
± 0,25 ) cm = (36,43 ± 0,25 )x10
-2
m
Teoretycznie wyniki mogą być obliczane do dowolnego miejsca rozwinięcia dziesiętnego, ale
sens fizyczny mają najwyżej dwie cyfry znaczące niepewności.
Zaokrąglanie zaczynamy od niepewności:
Obliczamy niepewność pomiarową z trzema cyframi znaczącymi x,y,z, co można
zapisać w postaci
m
x
xyz
S
10
,
0
×
=
I Pracownia Fizyczna IF UJ Marta Zimnal-Starnawska
4
gdzie
m należy do zbioru liczb całkowitych i jest tak
dobrane, aby x znajdowało się na pierwszym miejscu po przecinku.
},
9
,....
2
,
1
,
0
{
,
},
9
,....
2
,
1
{
∈
∈
z
y
x
Niepewność pomiarową zaokrąglamy do dwóch miejsc znaczących (Międzynarodowa
Norma Oceny Niepewności Pomiaru przyjmuje 2 cyfry znaczące w niepewności
pomiarowej).
Obowiązuje zasada, że wynik pomiaru zaokrąglamy do tego samego miejsca rozwinięcia
dziesiętnego co niepewność.
III Opracowanie wyników metodą graficzną
W przypadku opracowania wyników pomiarów wielkości zależnych, gdy y = f(x), stosujemy
metodę graficzną czyli wykonujemy wykresy. Mogą być wykonane ręcznie na papierze
milimetrowym lub za pomocą programów komputerowych, ale w obu przypadkach muszą
spełniać określone reguły.
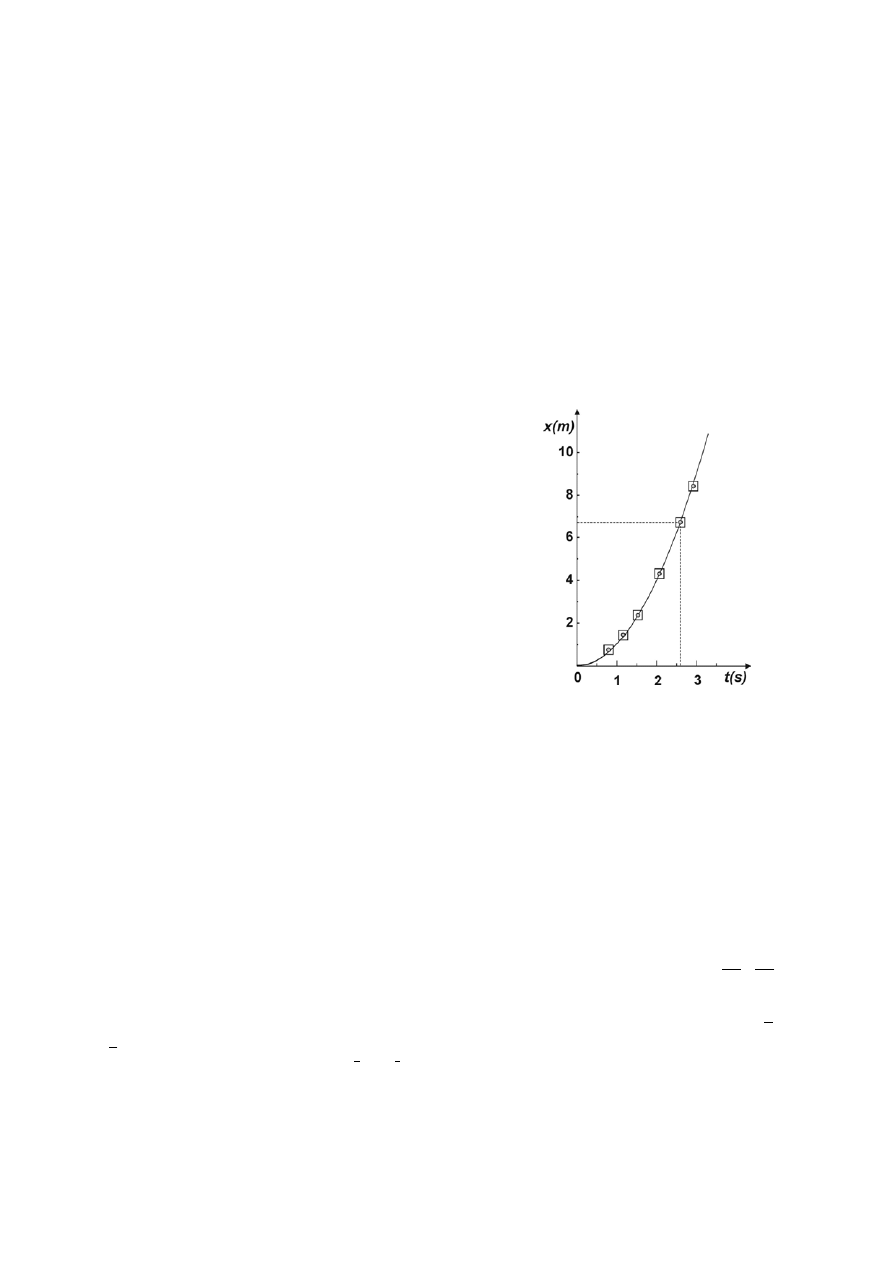
Osie układu powinny być opisane, tzn. podane
wielkości, które odkładamy na osiach oraz ich
jednostki
Odpowiednio dobrana skala tak, by na osi
znajdował się cały przedział zmienności
wielkości fizycznej ( oznacza to, że podziałka nie
musi zaczynać się od zera ) oraz można było
łatwo odczytać współrzędne punktów
Należy zaznaczyć punkty pomiarowe oraz
niepewności pomiarowe (punkt pomiarowy
znajduje się w prostokącie niepewności
pomiarowych
Rys.3 Przykład wykresu
Wykreślona krzywa powinna przechodzić przez
wszystkie prostokąty niepewności. Nie łączymy
punktów łamaną!
Analiza zależności liniowych
Bardzo często mierzone wielkości fizyczne x i y związane są zależnością liniową:
y= ax + b
gdzie współczynniki a i b można obliczyć metodą regresji liniowej. Współczynnik a
odpowiada za nachylenie prostej, a współczynnik b za punkt przecięcia z osią rzędnych.
Zazwyczaj współczynniki a i b mają interpretację fizyczną (są wyrażone w odpowiednich
jednostkach) i ich znajomość pozwala wyznaczyć niektóre wielkości fizyczne.
O tym, w jakim stopniu zależność liniowa jest spełniona, informuje współczynnik korelacji r,
którego wartość jest zawarta w przedziale {-1, 1}. Im większa jest wartość bezwzględna r ,
tym silniejsza jest korelacja, czyli tym ściślej jest spełniona zależność liniowa.
Rodzaje regresji
Wyniki pomiarów składają się z n par liczb x
i
, y
i
oraz ich niepewności pomiarowych
x
S
,
y
S .
W zależności od informacji o niepewnościach pomiarowych można stosować różne rodzaje
regresji liniowej i różne wzory do obliczania średnich wartości współczynników regresji
a
i
b
, ich odchyleń standardowych
a
S ,
b
S oraz współczynnika korelacji r .
1. Regresja klasyczna
– stosowana wtedy, gdy nie mamy żadnej informacji o niepewnościach
pomiarowych lub są to niepewności systematyczne.
I Pracownia Fizyczna IF UJ Marta Zimnal-Starnawska
5
C
y
x
y
x
n
a
n
i
n
i
i
n
i
i
i
i
∑
∑
∑
=
=
−
=
1
1
=1
n
x
a
y
b
n
i
i
n
i
i
∑
∑
=
=
−
=
1
1
C
y
b
y
x
a
y
n
n
S
n
i
n
i
i
n
i
i
i
i
a
∑
∑
∑
=
=
−
−
−
=
1
1
2
2
=1
n
x
S
S
n
i
i
a
b
∑
=
=
1
2
CD
y
x
y
x
n
r
n
i
n
i
i
n
i
i
i
i
∑
∑
∑
=
=
=
−
=
1
1
1
gdzie
,
2
1
1
2
−
=
∑
∑
=
=
n
i
i
n
i
i
x
x
n
C
2
1
1
2
−
=
∑
∑
=
=
n
i
i
n
i
i
y
y
n
D
2. Regresja zwyczajna - stosowana wtedy, gdy niepewnością pomiarową obciążone są
wartości tylko jednej zmiennej ( x lub y ) i dodatkowo niepewności mają te same wartości dla
wszystkich punktów pomiarowych. Można ją również stosować w przypadku, gdy
niepewność względna jednej zmiennej jest dużo mniejsza (przynajmniej 10 razy) niż drugiej
np.
i
y
i
x
y
S
x
S
10
≤
, wtedy niepewności zmiennej x pomijamy.
Wzory do obliczania średnich wartości współczynników regresji
a
i
b
oraz współczynnika
korelacji r pozostają takie same, jak przy regresji klasycznej, natomiast zmienia się tylko
sposób obliczania odchyleń standardowych
a
S ,
b
S .
C
S
n
S
y
a
2
=
n
x
S
S
n
i
i
a
b
∑
=
=
1
2
3. Regresja ważona - stosowana wtedy, gdy niepewnością pomiarową obciążone są wartości
tylko jednej zmiennej ( x lub y ) lecz niepewności mają różne wartości przynajmniej dla
niektórych punktów pomiarowych. Można ją również stosować w przypadku, gdy
niepewność względna jednej zmiennej jest dużo mniejsza (przynajmniej 10 razy) niż drugiej
np.
i
y
i
x
y
S
x
S
10
≤
, wtedy niepewności zmiennej x pomijamy.
4. Regresja efektywna - stosowana wtedy, gdy niepewnościami pomiarowymi obciążone są
wartości obydwu zmiennych i niepewności są różne przynajmniej dla niektórych punktów
pomiarowych.
Odpowiednie wzory obliczeń można znaleźć w skrypcie [3].
Przy badaniu wielkości liniowo zależnych, po analizie niepewności pomiarowych, należy:
I Pracownia Fizyczna IF UJ Marta Zimnal-Starnawska
6
- wybrać właściwą metodę analizy regresji. Oczywiście największą wartość posiada
regresja efektywna, a najmniejszą klasyczna, jednakże w laboratorium studenckim, ta
ostatnia jest najczęściej stosowana.
- obliczyć parametry prostej wraz z jednostkami
- narysować prostą o nachyleniu
a
przecinającą oś Y w punkcie
b
, nanieść punkty
pomiarowe i ich niepewności
- napisać równanie prostej
- dokonać stosownej do danego doświadczenia analizy współczynników regresji
a
i
b
.
Cztery ostatnie punkty można wykonać używając gotowych programów komputerowych.
Należy jednak wiedzieć jakiego programu się używa i co on właściwie liczy.
LITERATURA
[1] J.R. Taylor: Wstęp do analizy błędu pomiarowego. PWN, Warszawa 1995
[2] H.Szydłowski: Pracownia fizyczna. PWN, Warszawa 1997
[3] H. Szydłowski: Wstęp do pracowni fizycznej. Wydawnictwo Naukowe UAM,
Poznań 1996
[4] B. Oleś, M Duraj: Ćwiczenia laboratoryjne z fizyki. Politechnika Krakowska,
Kraków 2000, rozdz. I.
I Pracownia Fizyczna IF UJ Marta Zimnal-Starnawska
7
Document Outline
- ANALIZA NIEPEWNOŚCI POMIAROWYCH W PIGUŁCE
Wyszukiwarka
Podobne podstrony:
NIEPEWNOŚĆ POMIARU
Wyk%c5%82ad Niepewno%c5%9b%c4%87 pomiaru
mierniki i niepewności pomiarowe
Błąd i niepewność pomiaru
podstawy analizy niepewności pomiarowych
Wyznaczanie niepewności pomiarów, PWr W9 Energetyka stopień inż, II Semestr, Podstawy metrologii i t
3 Wyznaczanie niepewności pomiaru pośredniego
00 niepewność pomiaru
F2- Obliczenia i rachunek niepewności pomiarowej, Szkoła, Fizyka 02
niepewnosci pomiarowe, PWr, SEMESTR 1, FIZYKA, sprawozdania
Pomiary i niepewności pomiarowe, 6
Niepewność pomiarów
Niepewnosc pomiaru KFS
FIZ48O, 1. Niepewno˙ci pomiarowe DI, DU.
więcej podobnych podstron