
INSTRUKCJA DO ĆWICZENIA NR.5
TEMAT:
Pomiar sił i masy metodą tensometryczną
CEL CWICZENIA
Celem ćwiczenia jest zapoznanie się , ze sposobem pomiaru siły i masy z
wykorzystaniem przetworników tensometrycznych
PRZEBIEG ĆWICZENIA
1. Zapoznać się z przyrządami używanymi do ćwiczenia.
2. Dokonać wzorcowania przetwornika tensometrycznego siły.
-wzorcowanie przeprowadzamy obciążając znanymi wzorcami masy przetwornik
tensometryczny i dokonując odczytu napięcia wyjściowego z mostka
pomiarowego. W zakresie od 0 do 10 kg.
3. Sprawdzić pokrycie punktów na szalce pomiarowej.
DO OPRACOWANIA W SPRAWOZDANIU
1. Przedstawić graficznie krzywą wzorcowania.
2. Obliczyć stałą przetwornika.
3. Odpowiedzieć na zagadnienie problemowe uzyskane w trakcie
przeprowadzania pomiarów od prowadzącego.

Wybrane zagadnienia tensometrii oporowej
Zasada metody elektrycznej tensometrii oporowej opiera się na znanej
własności fizycznej drutu metalowego, polegającej na zmianie jego rezystancji
R
wraz ze zmianą jego geometrii na wskutek rozciągania bądź ściskania.
(3.1)
gdzie:
- rezystancja właściwa, Ω,
l
- długość czynna, m,
S - pole przekroju poprzecznego drutu, m
2
.
Zjawisko to jest znane od przeszło stu lat i było po raz pierwszy
stwierdzone przez Williama Thomsona w roku 1856. Wykorzystane zostało
jednakże w tensometrii oporowej dopiero w 1937 roku. Motorem rozwojowym
tensometrii oporowej w tym okresie były potrzeby powstałego i prężnie
rozwijającego się lotnictwa szczególnie wojskowego. Pierwsze prace
w zakresie budowy i wykorzystania tensometrów oporowych wykonane zostały
przez E.E. Simmonsa w roku 1937 w California Institute of Technology oraz
w tym samym czasie przez A.C. Ruge`a w Massachusetts Institute
of Technology. Simmons użył cienkiego drutu oporowego naklejonego
bezpośrednio na badanym materiale. Natomiast Ruge nakleił drut na cienką
podkładkę papierową, którą z kolei nakleił na badany materiał i to on stanowił
prototyp obecnie stosowanego tensometru [41].
Tensometryczny czujnik czasami w literaturze przedmiotu zwany
„elektrooporowy” jest wykonany z drutu odpowiednio ukształtowanego w celu
uzyskania jak największej dokładności odczytu zmian oporu. Drut znajduje się
między papierowymi lub foliowymi sklejonymi ze sobą okładkami izolującymi.
Ogólnie tensometry można podzielić na trzy rodzaje:
- tensometry drutowe,
- tensometry foliowe,
- tensometry półprzewodnikowe.
l
R
S
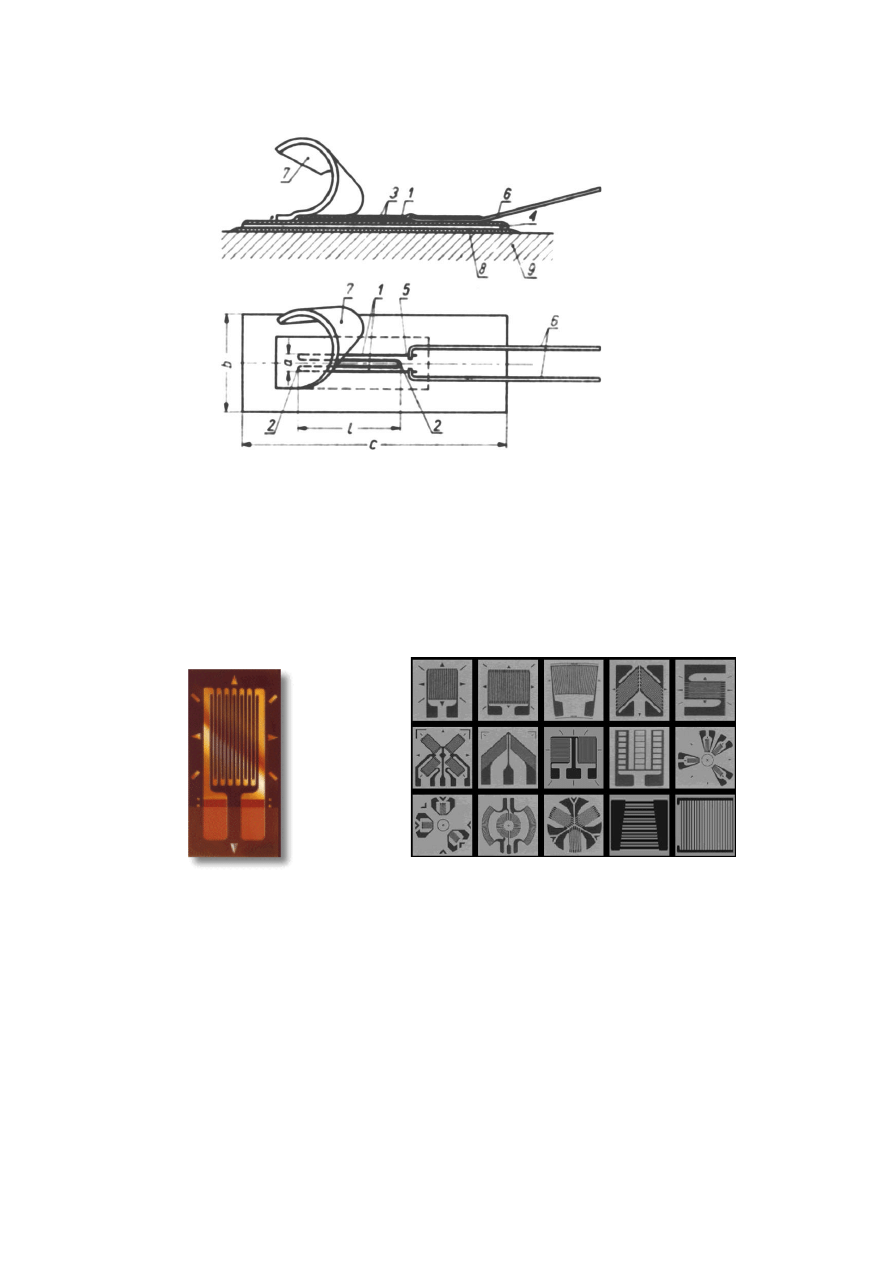
Rys. 3.1. Budowa tensometru drutowego [45]
1 – drut uformowany w wężyk, 2 – przegięcia drucików, 3 – klej mocujący drucik do
podkładki nośnej, 4 – podkładka nośna, 5 – końcówki drucika oporowego, 6 –
wyprowadzenia, 7 – naklejana nakładka ochronna, 8 – klej mocujący tensometr do
badanego elementu, 9 – badany element, l – baza tensometru, b, c – wymiary podkładki
A
B
Rys. 3.2. Tensometr foliowy; A - tensometr prosty,
B - różne kształty tensometrów [66]
W tensometrach drutowych (rys.3.1), jak opisano wyżej, element
przewodzący wykonany jest w postaci cienkiego drutu, natomiast w tensometrach
foliowych w postaci cienkiej folii (rys.3.2). W tensometrach półprzewodnikowych
elementem pomiarowym jest pręcik z monokryształu krzemu. Pomiędzy
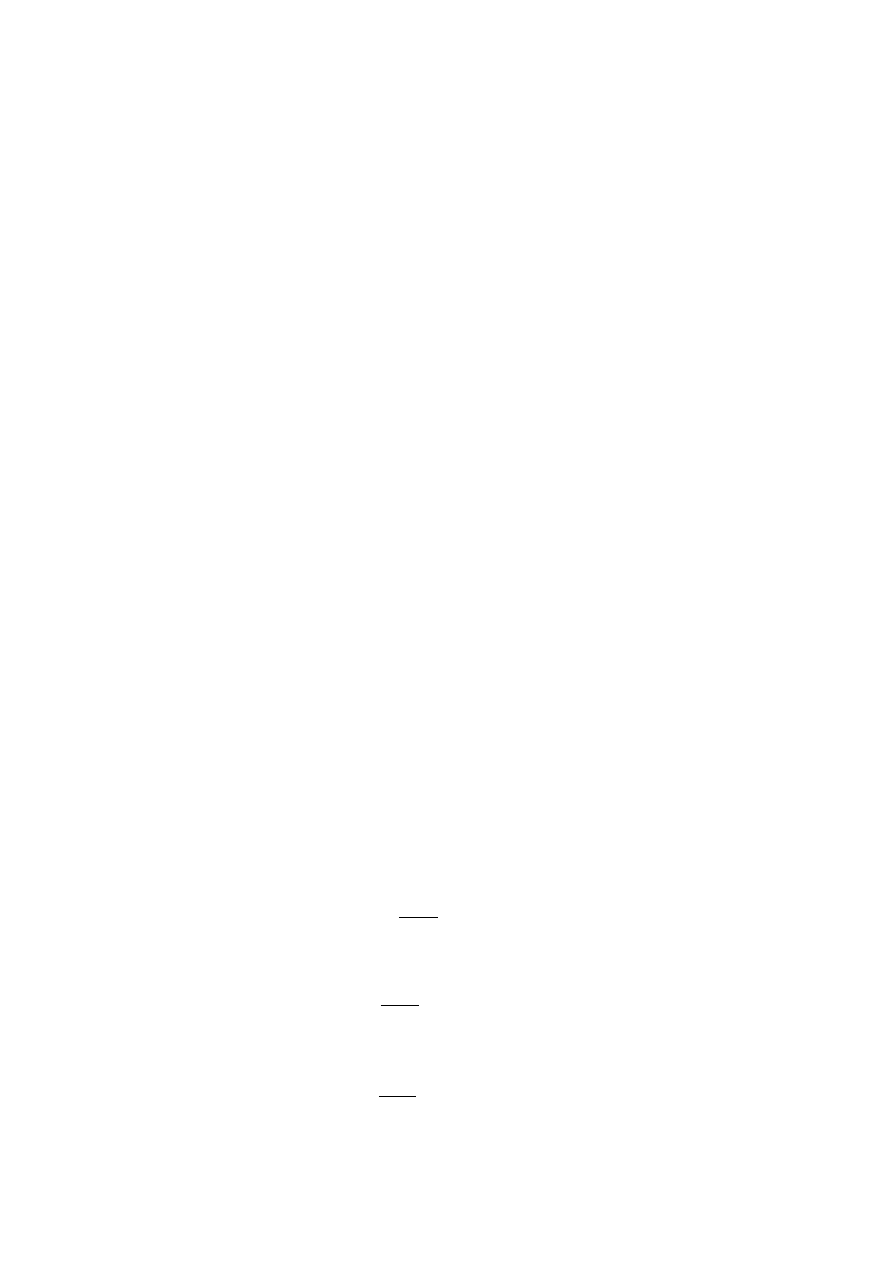
tensometrem foliowym a drutowym zasadnicza różnica to kształt elementu
roboczego, a także technologia produkcji. W drutowych drucik układany jest
mechanicznie, rozpinany i klejony pomiędzy dwoma warstwami najczęściej
papieru. Dokładność wykonania oraz powtarzalność parametrów tensometrów jest
mocno ograniczona. Możliwe są wykonania tylko tensometrów prostych co do
kształtu. Natomiast foliowe wykonuje się przy zastosowania obróbki
elektrochemicznej, podobnie jak w produkcji układów elektronicznych. Daje to
szansę bardzo precyzyjnego i powtarzalnego wykonania elementów. Niezależnie
od tego stwarza to możliwości wykonania bardzo różnorodnych kształtów oraz
bardzo małych wymiarów. Parametry jakościowe tensometrów foliowych są
zdecydowanie lepsze, szczególnie jeśli chodzi o charakterystyki kierunkowe oraz
powtarzalność, co w efekcie wpływa na dokładność pomiaru.
Tensometry półprzewodnikowe natomiast wykonane są w postaci cienkiego
pojedynczego pręcika monokryształu krzemu, Posiadają sześćdziesięciokrotnie
wyższy współczynnik czułości „k” od tensometrów foliowych i to jest podstawową
zaletą tych tensometrów, natomiast są niezwykle delikatne mechanicznie,
możliwe do obsadzania tylko na powierzchniach płaskich. Dodatkową istotną wadą
jest bardzo duży współczynnik temperaturowy. Dlatego dzisiejszy rynek ze
względów naturalnych został zdominowany przez tensometry foliowe.
Na nieobciążonej powierzchni ciała występuje płaski stan naprężenia
scharakteryzowany trzema współrzędnymi tensora naprężenia, związanymi
w liniowo-sprężystym izotropowym materiale ze współrzędnymi tensora
odkształcenia równaniami Hooke’a, w których występują dwie stałe materiałowe,
moduł Younga E i liczba Poissona
[41] :
1
x
x
y
E
(3.2)
(3.3)
(3.4)
1
y
y
x
E
1
x
xy
E
Przy założeniu, iż tensometr pracuje w warunkach rozciągania (lub
ściskania) w kierunku równoległym do osi drutu oporowego, o przekroju kołowym o
średnicy
d w dowolnym miejscu drutu wystąpi jednoosiowy stan naprężenia o
stałej wartości naprężenia
. Wartości odkształceń
w kierunku równoległym od
osi drutu będą równe:
(3.5)
zaś w dowolnym poprzecznym wymiarze
1
wyniosą:
(3.6)
gdzie:
E - moduł Young’a,
ν - liczba Poisson’a dla materiału drutu.
Różniczkowa postać równania (3.1) dla przyrostów skończonych ma postać:
(3.7)
a poprzez kolejne przekształcenia, w których uwzględniono zależności:
(3.8)
otrzymano:
(3.9)
Przyjmując:
(3.10)
gdzie k – czułość tensometru
otrzymuje się następującą postać
E
1
=-
R
l
s
R
l
s
l
l
d
d
l
l
1
1 2
R
R
1
1 2
k
R k
R

(3.11)
Powyższa zależność (3.11) jest zasadniczym równaniem w zakresie
tensometrii, wiążącym podstawowe mechaniczne i elektryczne parametry pracy
tensometru [45].
Jak wynika z równania otrzymany względny przyrost rezystancji jest tym
większy, im większe jest mierzone odkształcenie oraz im większy jest
współczynnik czułości
k tensometru. Stała k tensometru jest wielkością stałą
tylko w pewnych granicach - do pewnej maksymalnej wartości odkształcenia ε,
która zależy od materiału tensometru. Dla dużych odkształceń tensometr staje
się nieliniowym. Najczęściej maksymalny poziom odkształceń wynosi 0,5% co
odpowiada naprężeniom normalnym w stali na poziomie 1000 MPa.
3.1. Wykorzystanie układu mostka Wheatstone`a do pomiaru
siły przy zginaniu belki
Model giętej belki jako przetwornika sprężystego, z uwagi na duże
poziomy odkształceń na powierzchni belki, jest często wykorzystywany do
konstrukcji wag także i aerodynamicznych. Dlatego ważnym jest, aby
odpowiednio dobrać sposób usytuowania tensometrów w stosunku do kierunku
obciążenia a także sposób konfiguracji tensometrów pomiarowych. Z uwagi na
uniwersalność, do celów pomiarowych używany jest układ mostka
w konfiguracji Wheatstone`a, w którym znoszą się sygnały wspólne na
elementach pomiarowych, a do takich należą np. sygnały związane ze zmianą
rezystancji spowodowaną temperaturą. Jednak w tym układzie w zależności od
sposobu połączenia tensometrów aktywnych układ może mieć zdolność reagowania
na określony kierunek obciążenia belki.
L
L 1
L 2
T 2 *
T1 *
T 1
T 2
F
U z
U w y j
T 1
T 2
T 1 *
T2 *
l
2
l
1
l
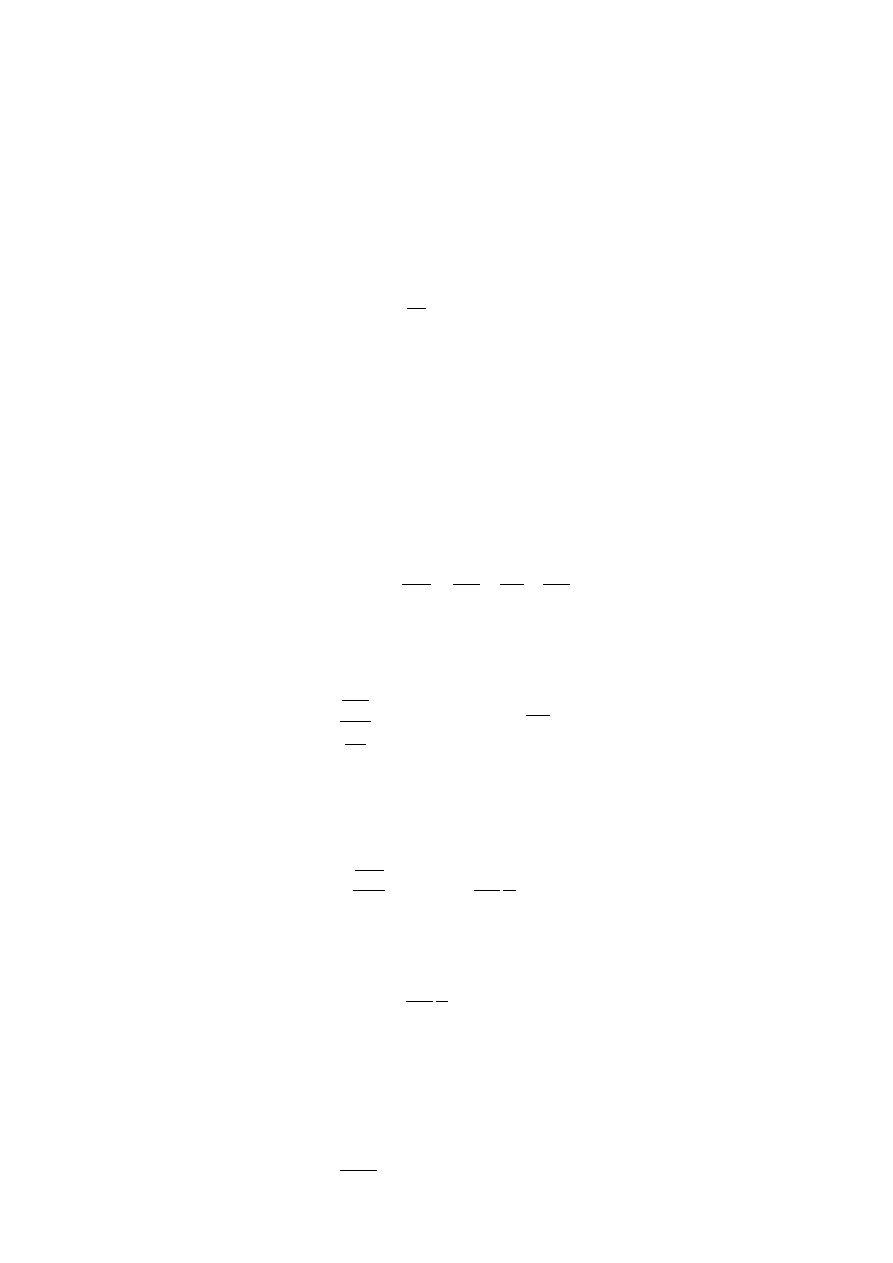
Rys. 3.3. Pomiar siły z wykorzystaniem belki zginanej
T1, T1*, T2, T2* - tensometry aktywne,
U
z
- napięcie zasilające mostek,
U
wyj
- napięcie wyjściowe z mostka,
F –
siła,
l
– długość belki
Rezystancje tensometrów w układzie jak na rys. 3.3. przy obciążeniu belki
siłą F wyrażają się wzorami:
(3.12)
gdzie:
1
R ,
2
R ,
1
R
,
2
R
- rezystancje całkowite tensometrów po obciążeniu, Ω,
0
R - rezystancje tensometrów przed obciążeniem, Ω,
1
R ,
2
R - zmiana rezystancji po obciążeniu, Ω,
t
R - zmiana rezystancji na skutek zmian temperatury, Ω.
Różnica momentów gnących w obu przekrojach;
1
0
1
2
0
2
1
0
1
2
0
2
t
t
t
t
R R
R
R
R
R
R
R
R
R
R
R
R
R
R
R
1
2
1
2
(
)
g
g
M
M
F l l
(3.13)
Po przekształceniach, przy uwzględnieniu;
(3.14)
gdzie: W- wskaźnik wytrzymałości przekroju
otrzymujemy wartość siły
1
2
1
2
F EW
l l
(3.15)
Przy połączeniu tensometrów w mostek Wheatstone`a, jak pokazano na
rysunku 3.3 na podstawie wzorów (3.12) wyprowadzono zależność na napięcie
U
wyj
z mostka w stanie niezrównoważenia [41];
1
1
2
2
0
0
0
0
0
0
0
0
4
t
t
t
t
wyj
R
R
R
R
R
R
R
R
U
U
R
R
R
R
R
R
R
R
stąd
1
2
1
2
0
0
0
0
2
2
4
2
wyj
R
R
R
R
U
U
U
R
R
R
R
(3.17)
a ponieważ z równania ogólnego tensometrii (3.19) wynika;
(3.18)
2
2
0
R
k
R
(3.19)
więc;
1
2
2
wyj
U
U
k
(3.20)
Z wyprowadzonych wzorów (3.15) i (3.20) wynikają dwa wnioski [45]:
1
1
0
R
k
R
g
M
W
E

- wielkość poszukiwanej siły
F jest proporcjonalna do różnicy odkształceń
belki w przekrojach 1 i 2, czyli że napięcie na wyjściu tak skonfigurowanego
przetwornika zależy od wielkości siły przyłożonej a nie od długości ramienia, wiec
taki układ mierzy siłę a nie moment siły.
- sygnał wyjściowy z mostka w takim układzie będzie równy różnicy
odkształceń pomiędzy płaszczyznami pomiarowymi. Jednym słowem czułość
takiego przetwornika zależy od jego długości (ściślej odległości płaszczyzn
pomiarowych).
Ten ostatni wniosek wymusza we wszystkich konstrukcjach wag słupkowych
maksymalny rozstaw płaszczyzn pomiarowych, a tym samym zwiększa wymiar i
powoduje małą sztywność przetworników.
Wyszukiwarka
Podobne podstrony:
Geografia nr 2 id 188772 Nieznany
Cwiczenie nr 8 id 99953 Nieznany
Lista nr 3 id 270070 Nieznany
ef 271 4 2012 zal nr 2 id 15072 Nieznany
Lab nr 3 id 258529 Nieznany
Cwiczenie nr 2 4 id 99899 Nieznany
Materialy do wykladu nr 5 id 28 Nieznany
druk nr 5 id 142957 Nieznany
OP wyklad nr 3 id 335762 Nieznany
Protokol Nr 7 id 402593 Nieznany
Lista nr 6 id 270072 Nieznany
praca domowa nr 6 id 383980 Nieznany
Biologia nr 3(1) id 87951 Nieznany
Cwiczenie nr 1 id 594720 Nieznany
Cwiczenie Nr 3 id 125025 Nieznany
JPPO Wyk nr 2 id 228829 Nieznany
kolokwium nr 2 id 240791 Nieznany
więcej podobnych podstron