
Politechnika Świętokrzyska w Kielcach
Projekt:
Projektowanie pakietów elektronicznych
Temat:
Opracować układ elektronicznego sterowania osią manipulatora z siłownikiem
pneumatycznym sterowanym zaworem proporcjonalnym z zastosowaniem wybranych
regulatorów PID i regulatora stanu.
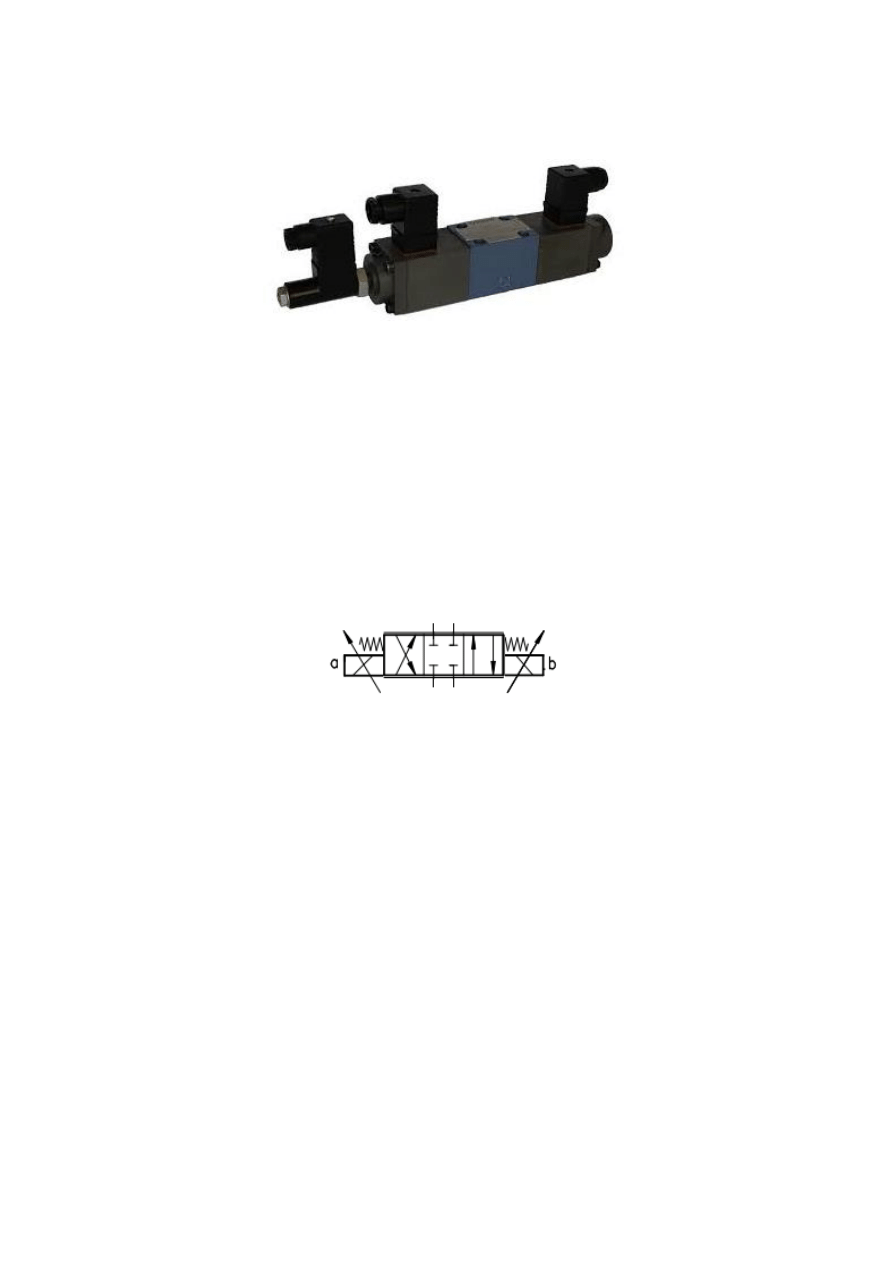
1. Zawór proporcjonalny typu USEB6:
a) Zastosowanie:
Jest przeznaczony do sterowania kierunkiem i szybkością ruchu odbiornika. Wielkość strumienia oleju
hydraulicznego kierowanego do odbiornika regulowana jest poprzez zmianę natężenia prądu zasilającego
cewkę elektromagnesu.
b) Schemat:
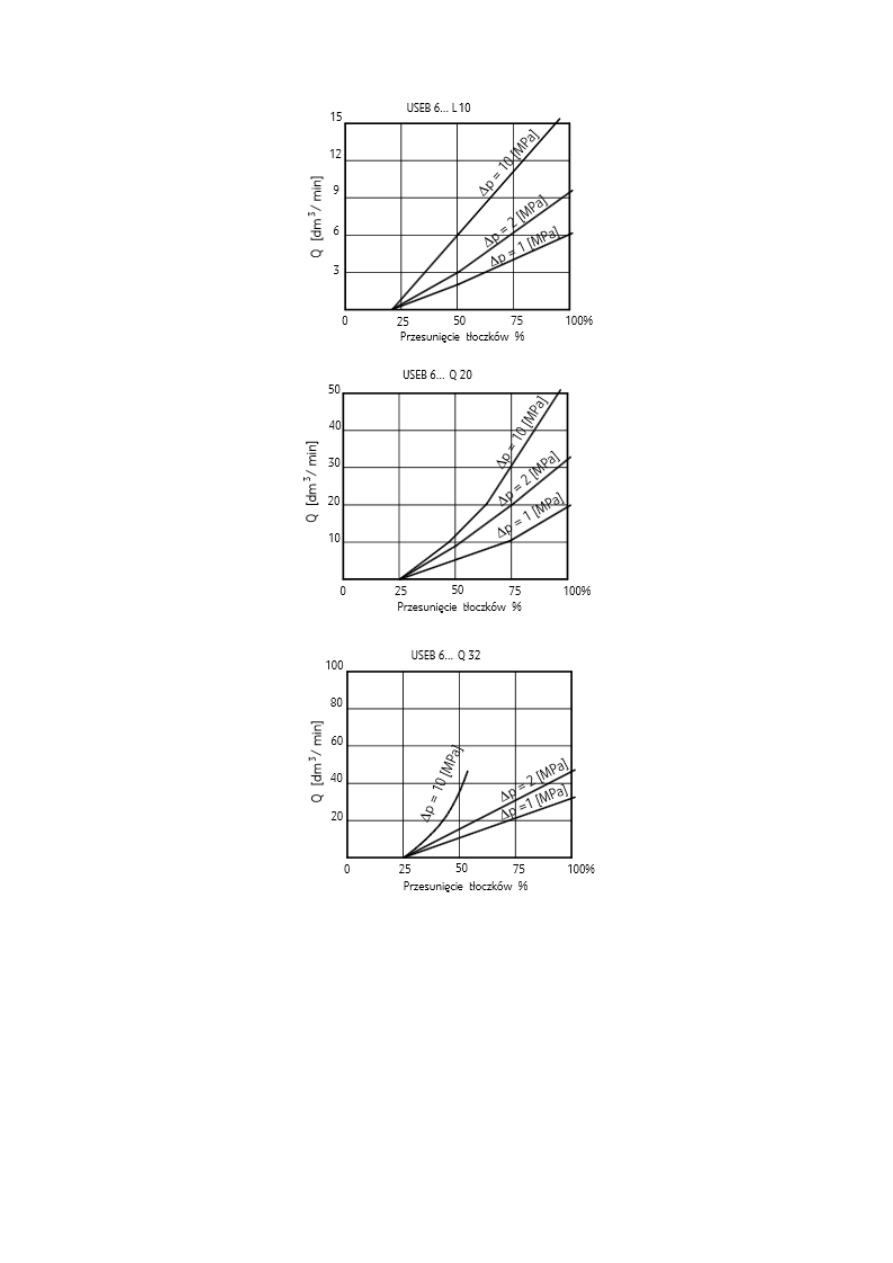
c) Charakterystyki:
2. Siłownik Hydrauliczny tłokowy UCJ 1… /UCJ2…:
a) Zastosowanie:
Jednotłoczyskowy siłownik hydrauliczny dwustronnego działania zamienia energię ciśnienia,
zakumulowaną w doprowadzonej do siłownika cieczy roboczej, na energię mechaniczną wprawiającą tłok
w ruch posuwisto-zwrotny.
Ruch roboczy tłoka wymuszany jest poprzez oddziaływanie ciśnienia czynnika roboczego po stronie
tłokowej. Ruch powrotny tłoka wymuszany jest oddziaływaniem ciśnienia czynnika po stronie tłoczyskowej.
b) Schemat Hydrauliczny siłownika pneumatycznego jednostronnego działania pchający :
1.
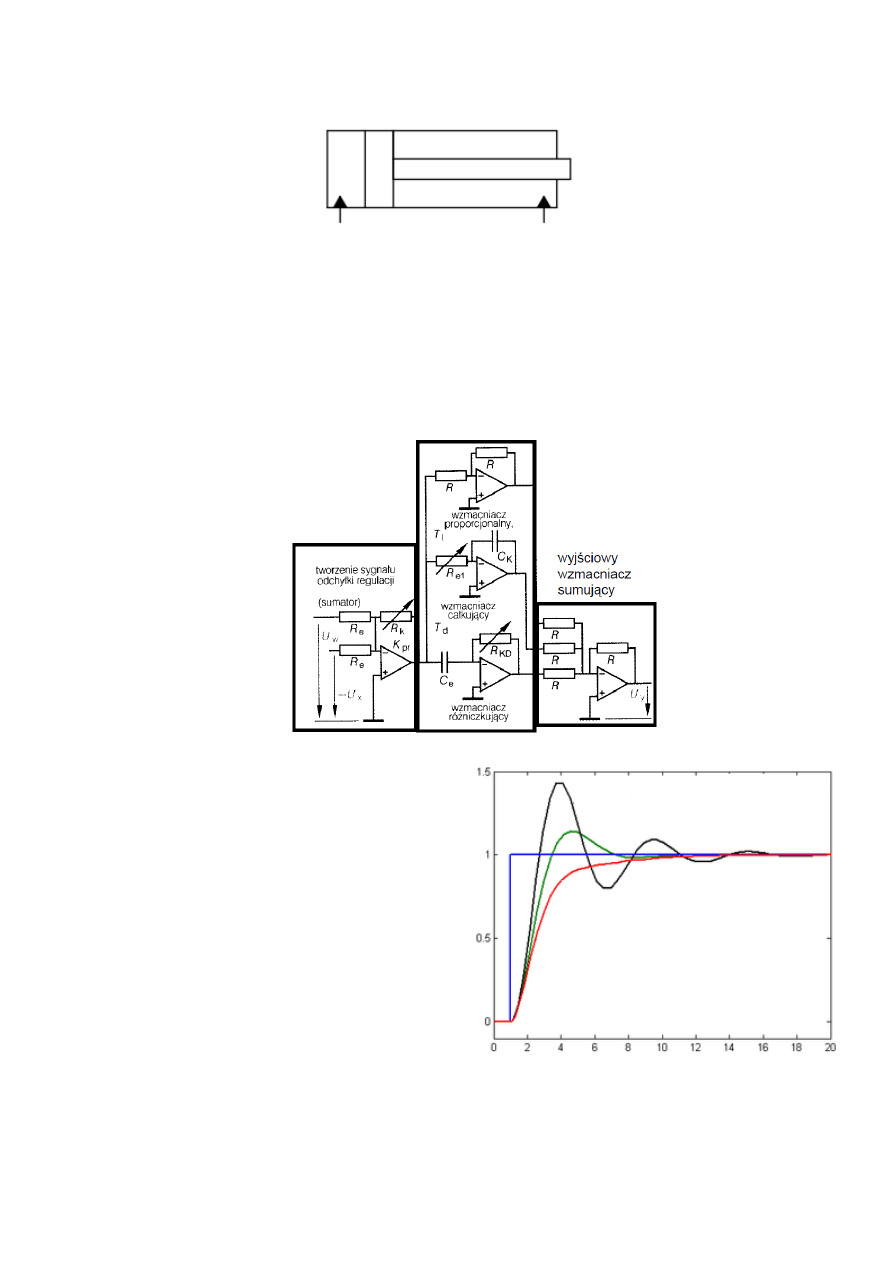
Elektroniczny regulator proporcjonalno – całkowo - różnicowy (PID)
Regulatory PID nale
ży
do najbardziej uniwersalnych.
Człon P regulatora natychmiast wzmacnia odchyłk
ę
regulacji tworz
ą
c sygnał
steruj
ą
cy.
Człon I zmienia sygnał tak długo, a
ż
odchyłka regulacji wyzeruje si
ę
.
Człon D reaguje na zmiany warto
ś
ci
odchyłki w czasie (dla ustalonej warto
ś
ci
odchyłki człon D nie reaguje).
Regulator PID buduje si
ę
jako układ wzmacniaczy operacyjnych
Odpowiedz regulatora PID na wymuszenie skokowe
Kolor niebieski – sygnał wejściowy
Kolor czarny – sygnał bez poprawnej regulacji
przez PID
Kolor czerwony – sygnał na wyjściu regulatora PID
2.
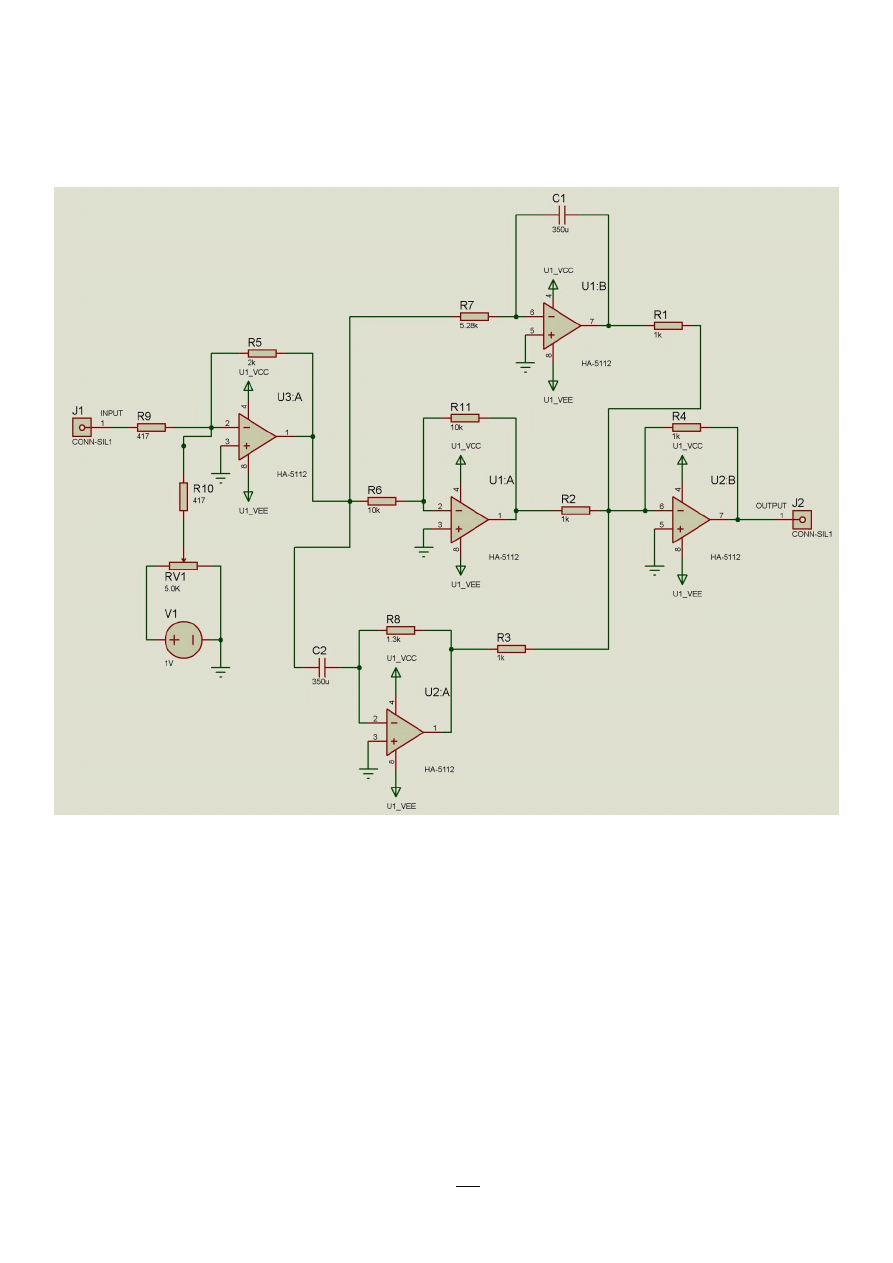
Proces realizacji projektu w programie Proteus:
a) Schemat rzeczywisty
Dobór wartości elementów wykorzystanych w projekcie ( rezystorów i kondensatorów).
Obliczenia przeprowadzone zgodnie z kryterium Zieglera-Nicholasa:
𝒌
𝒑
= 𝟎, 𝟔𝒌
𝒌𝒓
= 𝟒, 𝟖
𝑻
𝒊
= 𝟎, 𝟓 𝑻
𝒐𝒔𝒄
= 𝟏, 𝟖𝟓𝒔
𝑻
𝒅
= 𝟎, 𝟏𝟐𝟓 𝑻
𝒐𝒔𝒄
= 𝟎, 𝟒𝟔𝒔
𝒌
𝒑
=
𝑹𝟏
𝑹𝟐
𝑹𝟐 =
𝑹𝟏
𝒌
𝒑
𝑹𝟐 =
𝟐𝒌𝜴
𝟒, 𝟖𝜴
= 𝟒𝟏𝟕𝜴
𝑻
𝒊
= 𝑹𝑪 = 𝟏, 𝟖𝟓𝒔
𝑹 =
𝟏, 𝟖𝟓𝒔
𝟑𝟓𝟎𝝁
= 𝟓, 𝟐𝟖𝒌𝜴
𝑻
𝒅
= 𝑹𝑪 = 𝟎, 𝟒𝟔𝒔
𝑹 =
𝟎, 𝟒𝟔𝒔
𝟑𝟓𝟎𝝁
= 𝟏, 𝟑𝒌𝜴
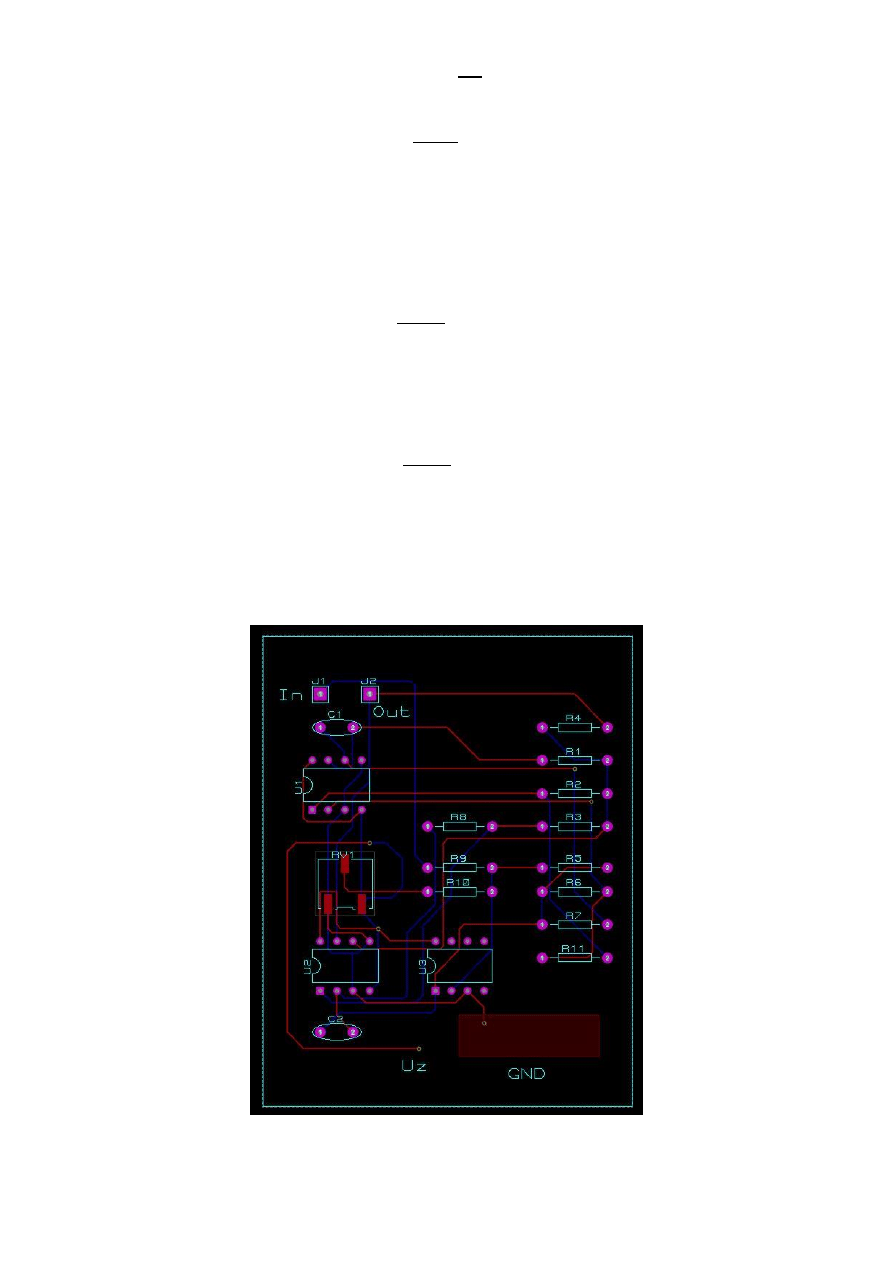
b) Projekt płytki PCB:
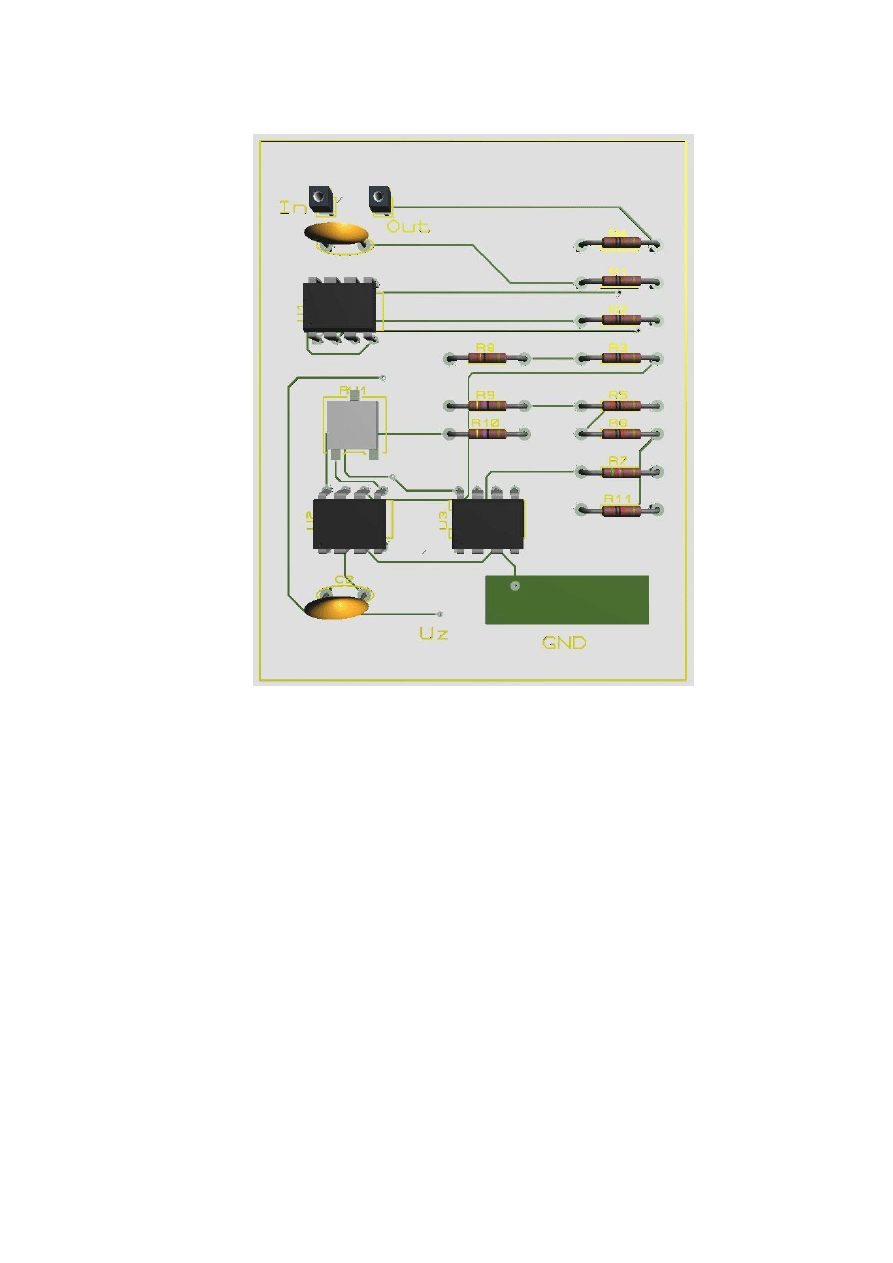
c) Projekt płytki w 3D:
3. Regulator stanu:
W naszym projekcie jako regulator stanu został wykorzystany potencjometr .
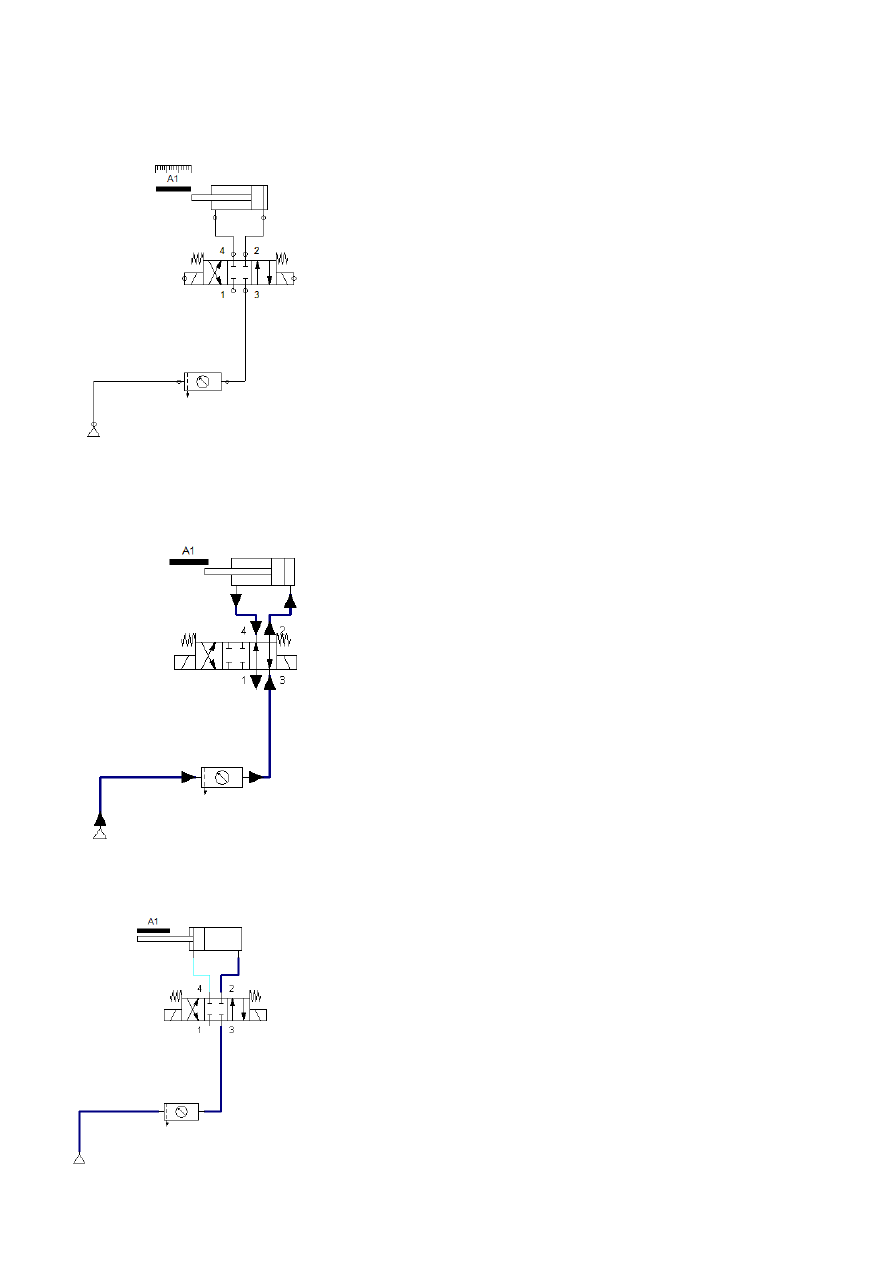
4. Symulacja w programie FluidSim:
Siłownik połączony z zaworem proporcjonalnym i
kompresorem.
Wtłaczane powietrze do układu powoduje przesunięcie siłownika
(Niebieska linia i czarne strzałki sygnalizują kierunek przepływu
sprężonego powietrza).
Na tym schemacie siłownik znajduje się w maksymalnym położeniu. W
układzie ruch powietrza jest wstrzymany.
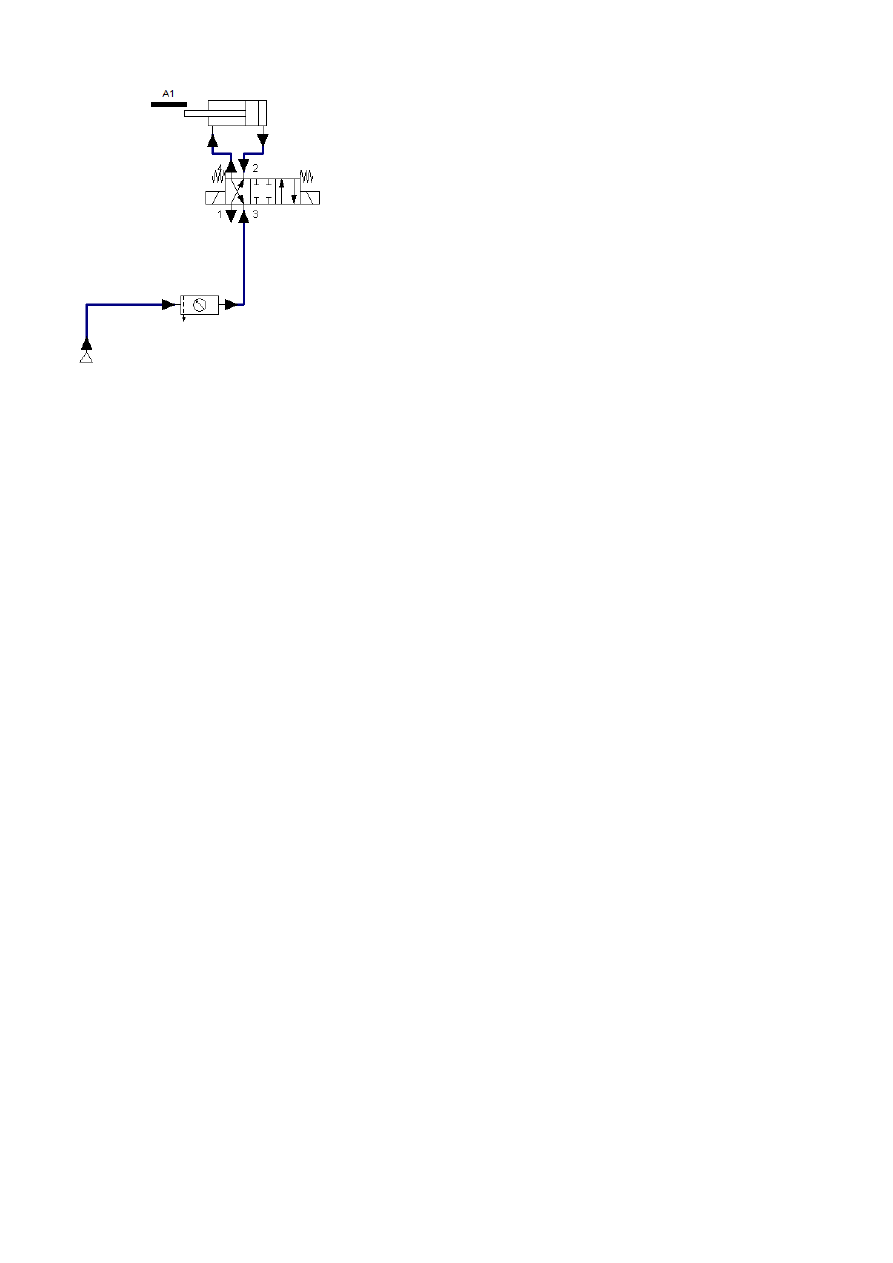
W układzie przez wyjście nr 4 zostaje wtłoczone powietrze co
skutkuje przesunięciem siłownika do pierwotnej pozycji.
5.
Wnioski:
Schemat rzeczywisty układu został wykonany w programie Proteus
8.0 również w tym programie zaprojektowaliśmy płytkę PCB wraz z
modelem 3D. Program FluidSim umożliwił nam analizę zasady
działania układu opartego o zawór proporcjonalny i siłownik
pneumatyczny. W projekcie wykorzystaliśmy regulator PID, a za
regulator sterujący posłużył nam potencjometr. W naszym zadaniu
oparliśmy się głównie o zastosowania technologiczne firmy Ponar
Wadowice.
Wyszukiwarka
Podobne podstrony:
PROJEKT ŚWIETNEGO DOMKU, okladka-max-PROJ, POLITECHNIKA ŚWIĘTOKRZYSKA W KIELCACH
METROLOGIA, MEtpneumat, POLITECHNIKA ŚWIĘTOKRZYSKA W KIELCACH
technologia maszyn, pierwsza strona, POLITECHNIKA ŚWIĘTOKRZYSKA W KIELCACH
METROLOGIA, kołazębata55, POLITECHNIKA ŚWIĘTOKRZYSKA W KIELCACH
METROLOGIA, kołazębata55, POLITECHNIKA ŚWIĘTOKRZYSKA W KIELCACH
Politechnika Świętokrzyska w Kielcach, Finanse Publiczne(1), projekt
PROJEKT ŚWIETNEGO DOMKU, okladka-grzes-PROJ, POLITECHNIKA ŚWIĘTOKRZYSKA W KIELCACH
AUTOMATYKA, Rególacja dwupołożeniowa, POLITECHNIKA ŚWIĘTOKRZYSKA w KIELCACH
Politechnika Świętokrzyska w Kielcach
Test-XX, studia, Logistyka Politechnika Świętokrzyska, Semestr 2, Makroekonomia, ćw, zestawy
3.Karta toczenia DRUK2, Politechnika Świętokrzyska, Dokumentacja technologiczna
3.Karta cięcia DRUK, Politechnika Świętokrzyska, Dokumentacja technologiczna
Przebiegi falowe w liniach długich(1), POLITECHNIKA ŚWIĘTOKRZYSKA
termodynamika spr na srode 15.20 parzysta, Badanie wentylatora promieniowego szetela, POLITECHNIKA Ś
PROJEKT NR 1 - MILENA, STRONA TYTUŁOWA, POLITECHNIKA ŚWIĘTOKRZYSKA
selsyn, POLITECHNIKA ˙WI˙TOKRZYSKA W KIELCACH
3F TRO, POLITECHNIKA ŚWIĘTOKRZYSKA
więcej podobnych podstron