LABORATORIUM MECHANIKI EKSPERYMENTALNEJ
Instrukcja do ćwiczenia
6
WYZNACZANIE PARAMETRÓW DYNAMICZNYCH UKŁADU
O JEDNYM STOPNIU SWOBODY
Cel
ć
wiczenia
Zapoznanie z zasadami modelowania obiektów rzeczywistych w celu zast
ą
pienia
prostego obiektu badanego modelem fizycznym i matematycznym. Dla otrzymanego układu
zast
ę
pczego - modelu fizycznego o jednym stopniu swobody nale
ż
y okre
ś
li
ć
, na drodze
analityczno - eksperymentalnej, parametry dynamiczne takie jak: masa zredukowana,
zast
ę
pczy współczynnik tłumienia i zast
ę
pczy współczynnik spr
ęż
ysto
ś
ci.
Literatura
J.Leyko, Mechanika Ogólna, tom II
Zagadnienia kontrolne
1. Zasady modelowania układów rzeczywistych.
2. Znajomo
ść
układania równa
ń
ruchu dla układów o jednym stopniu swobody.
3. Sposoby rozwi
ą
zywania, równa
ń
ró
ż
niczkowych zwyczajnych liniowych o stałych
współczynnikach.
4. Interpretacja parametrów dynamicznych układów.
5. Poj
ę
cia: okres drga
ń
, cz
ę
sto
ść
drga
ń
, cz
ę
stotliwo
ść
drga
ń
, dekrement tłumienia,
logarytmiczny dekrement tłumienia, tłumienie podkrytyczne, krytyczne i nadkrytyczne,
tłumienie wiskotyczne.
6. Znajomo
ść
modelu matematycznego opisu drga
ń
swobodnych (przebiegu w czasie)
tłumionych układu o 1SS.
Dodatkowo:
7. Charakterystyka amplitudowo cz
ę
stotliwo
ś
ciowa układu o 1SS (drgania wymuszone
harmonicznie) dla ró
ż
nych stopni tłumienia
8. Poj
ę
cie rezonansu.
Podstawy teoretyczne w zakresie dotycz
Wst
ę
p
W wielu zagadnieniach techni
rzeczywistych, przy okre
ś
leniu bezpiecznego za
obiektu na wyst
ę
puj
ą
ce wymu
pod wzgl
ę
dem wytrzymało
ś
własno
ś
ci dynamicznych obiektów. Du
powoduje,
ż
e równie
ż
ich mode
zło
ż
ono
ś
ci
ą
. Dlatego te
ż
w pierwszym przybli
prostszymi np. układami o jednym lub dwóch stopniach swobody i dla nich okre
parametry dynamiczne.
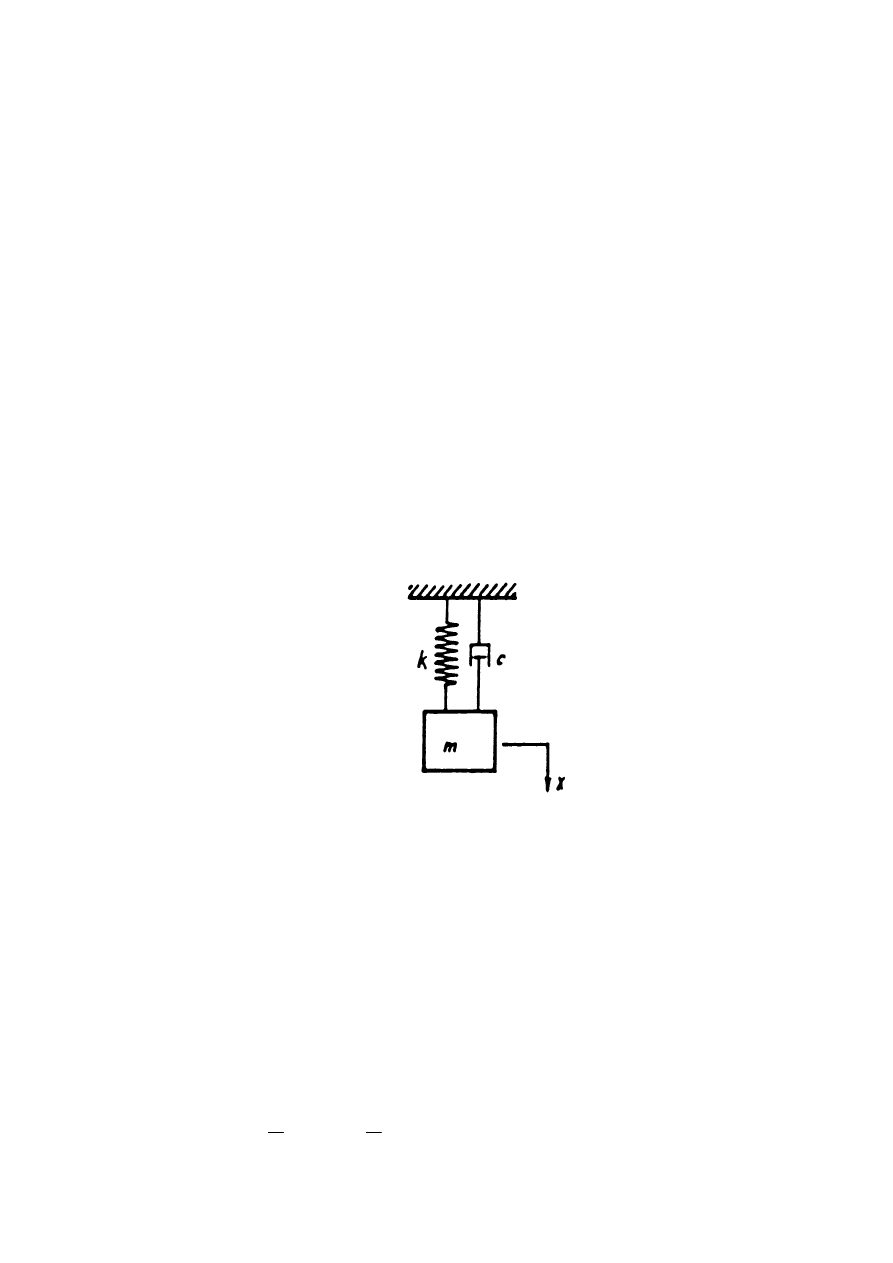
Drgania swobodne układu o jednym stopniu swobody, przedstawionego na r
mo
ż
emy opisa
ć
równaniem (1
Rys. 1.
gdzie: m – masa poruszaj
ą
ca si
x – współrz
ę
dna (wychylenie od poło
k – współczynnik spr
ęż
c – współczynnik tłumienia
siły oporu do pr
ę
dko
ś
Przyjmuj
ą
c nast
ę
puj
ą
ce oznaczenia:
2
ξω
=
m
c
w zakresie dotycz
ą
cym eksperymentu
W wielu zagadnieniach technicznych np. w zadaniu minimaliza
ś
leniu bezpiecznego zakresu pracy ze wzgl
ce wymuszenia (np. siłami w maszynie), przy optymalizacji konstrukcji
dem wytrzymało
ś
ciowym i w wielu innych przypadkach, istotna jest znajomo
ci dynamicznych obiektów. Du
ż
a zło
ż
ono
ść
budowy wielu układów rzeczywistyc
ich modele fizyczne i matematyczne charakteryzuj
ż
w pierwszym przybli
ż
eniu, układy takie zast
prostszymi np. układami o jednym lub dwóch stopniach swobody i dla nich okre
Drgania swobodne układu o jednym stopniu swobody, przedstawionego na r
równaniem (1):
Rys. 1. Model układu o jednym stopniu swobody
0
=
+
+
kx
x
c
x
m
&
&
&
masa poruszaj
ą
ca si
ę
ruchem post
ę
powym
dna (wychylenie od poło
ż
enia równowagi ),
współczynnik spr
ęż
ysto
ś
ci,
tłumienia (w przyj
ę
tym modelu przyj
ę
to proporcjonalno
dko
ś
ci ciała poruszaj
ą
cego si
ę
).
ce oznaczenia:
2
0
0
,
ω
ξω
=
m
k
,
niu minimalizacji drga
ń
układów
kresu pracy ze wzgl
ę
du na odpowied
ź
szenia (np. siłami w maszynie), przy optymalizacji konstrukcji
padkach, istotna jest znajomo
ść
budowy wielu układów rzeczywistych
le fizyczne i matematyczne charakteryzuj
ą
si
ę
du
żą
ie zast
ę
puje si
ę
modelami
prostszymi np. układami o jednym lub dwóch stopniach swobody i dla nich okre
ś
la si
ę
Drgania swobodne układu o jednym stopniu swobody, przedstawionego na rys.1,
układu o jednym stopniu swobody
(1)
to proporcjonalno
ść
równanie (1) mo
ż
na zapisa
ć
w postaci:
,
0
2
2
0
0
=
+
+
x
x
x
ω
ξω
&
&
&
(2)
gdzie:
ξ
- bezwymiarowy współczynnik tłumienia,
0
ω
- cz
ę
sto
ść
drga
ń
własnych, nietłumionych.
Rozwi
ą
zanie równania (2) ma posta
ć
(dla
ξ
<1):
(
)
(
)
[
]
t
B
t
A
e
x
t
2
0
2
0
1
cos
1
sin
0
ξ
ω
ξ
ω
ξω
−
+
−
=
−
.
Przyjmuj
ą
c warunki pocz
ą
tkowe:
,
0
,
0
0
0
=
=
=
=
t
t
x
x
x
&
(3)
otrzymujemy:
.
,
0
0
x
B
A
=
=
(4)
Tak wi
ę
c, rozwi
ą
zanie przyjmuje posta
ć
:
(
)
t
e
x
x
t
2
0
0
1
cos
0
ξ
ω
ξω
−
=
−
.
(5)
Aby zdefiniowa
ć
dany układ, nale
ż
y okre
ś
li
ć
cz
ę
sto
ść
0
ω
drga
ń
własnych nietłumionych
układu oraz współczynnik tłumienia
ξ
. Z wzoru (5) wynika,
ż
e cz
ę
sto
ść
drga
ń
swobodnych
wynosi:
.
1
2
0
ξ
ω
ω
−
=
Układ rzeczywisty
W
ć
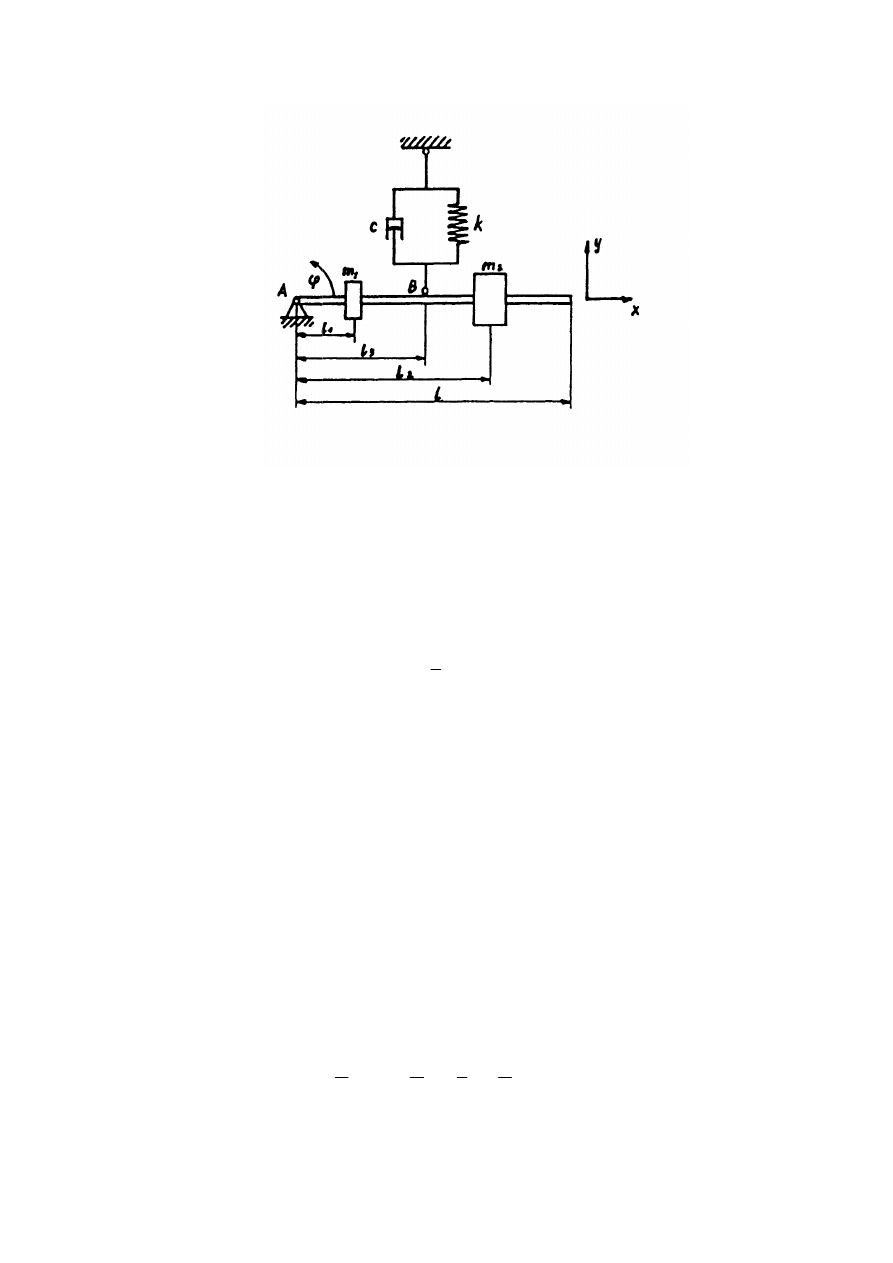
wiczeniu rozpatrzymy układ przedstawiony schematycznie na rys. 2.
Układ składa si
ę
z pr
ę
ta i nało
ż
onych na pr
ę
t mas. Pr
ę
t mo
ż
e si
ę
obraca
ć
dokoła przegubu
A i jest utrzymywany w poło
ż
eniu poziomym przez spr
ęż
yn
ę
lub par
ę
spr
ęż
yn.
Dynamiczne równanie ruchu dla tego układu ma posta
poło
ż
enia równowagi):
gdzie:
I
- moment bezwładno
2
1
, m
m
- masy ci
ęż
arków,
b
m
- masa pr
ę
ta (jednorodny, sztywny),
2
1
, l
l
- odległo
ść
ś
rodków mas od osi obrotu,
3
l
- odległo
ść
od osi obrotu punktu prz
dyssypatywnego.
Współrz
ę
dna okre
ś
laj
ą
ca wychylenie od poło
spr
ęż
ysto-dyssypatywnego (punkt
Uwzgl
ę
dniaj
ą
c to równanie (6) mo
1
m
Rys. 2. Model badanego układu
Dynamiczne równanie ruchu dla tego układu ma posta
ć
(dla niewielkich wychyle
ϕ
ϕ
ϕ
&
&
&
c
l
k
l
I
2
3
2
3
−
−
=
,
,
3
1
2
3
2
3
2
2
2
2
2
1
1
ϕ
ϕ
ϕ
&
&
&
c
l
k
l
l
m
l
m
l
m
b
−
−
=
+
+
moment bezwładno
ś
ci układu wzgl
ę
dem osi przegubu A,
ęż
arków,
ta (jednorodny, sztywny),
rodków mas od osi obrotu,
od osi obrotu punktu przył
ą
czenia elementu spr
ęż
ca wychylenie od poło
ż
enia równowagi punktu doł
dyssypatywnego (punkt redukcji układu – punkt B):
.
3
ϕ
l
y
=
równanie (6) mo
ż
na zapisa
ć
w postaci:
,
0
3
1
2
3
2
3
2
2
2
3
1
1
=
+
+
+
+
ky
y
c
y
l
l
m
l
l
m
l
l
b
&
&
&
dla niewielkich wychyle
ń
ϕ
od
(6)
czenia elementu spr
ęż
ysto-
enia równowagi punktu doł
ą
czenia elementu
(7)
(8)
Przyjmuj
ą
c:
,
3
1
2
3
2
3
2
2
2
3
1
1
+
+
=
l
l
m
l
l
m
l
l
m
m
b
z
(9)
równanie ruchu zapiszemy:
0
2
2
0
0
=
+
+
y
y
y
ω
ξω
&
&
&
,
(10)
gdzie:
.
,
2
2
0
0
ω
ξω
=
=
z
z
m
k
m
c
Okres drga
ń
swobodnych układu wynosi:
.
1
2
2
0
ξ
ω
π
−
=
T
(11)
Kolejne maksymalne wychylenia tworz
ą
ci
ą
g geometryczny o ilorazie równym:
( )
(
)
δ
ξω
=
=
=
+
+
T
i
i
e
A
A
T
t
y
t
y
0
1
max
max
,
(12)
nazywanym dekrementem tłumienia drga
ń
. Bardzo cz
ę
sto wykorzystuje si
ę
logarytmiczny
dekrement tłumienia drga
ń
zdefiniowany nast
ę
puj
ą
co:
( )
T
A
A
i
i
0
1
ln
ln
ξω
δ
=
=
=
∆
+
.
(15)
Na podstawie znanej warto
ś
ci zredukowanej masy m
z
mo
ż
emy obliczy
ć
warto
ść
zredukowanego współczynnika tłumienia c
z
i zredukowanej sztywno
ś
ci k
z
:
,
2
T
m
c
z
z
∆
=
(
)
2
2
2
4
∆
+
=
π
T
m
k
z
z
,
(16)
gdzie warto
ś
ci logarytmicznego współczynnika tłumienia i okresu drga
ń
swobodnych
tłumionych T okre
ś
lamy na podstawie przebiegu przemieszcze
ń
drga
ń
swobodnych punktu
redukcji obiektu rzeczywistego.
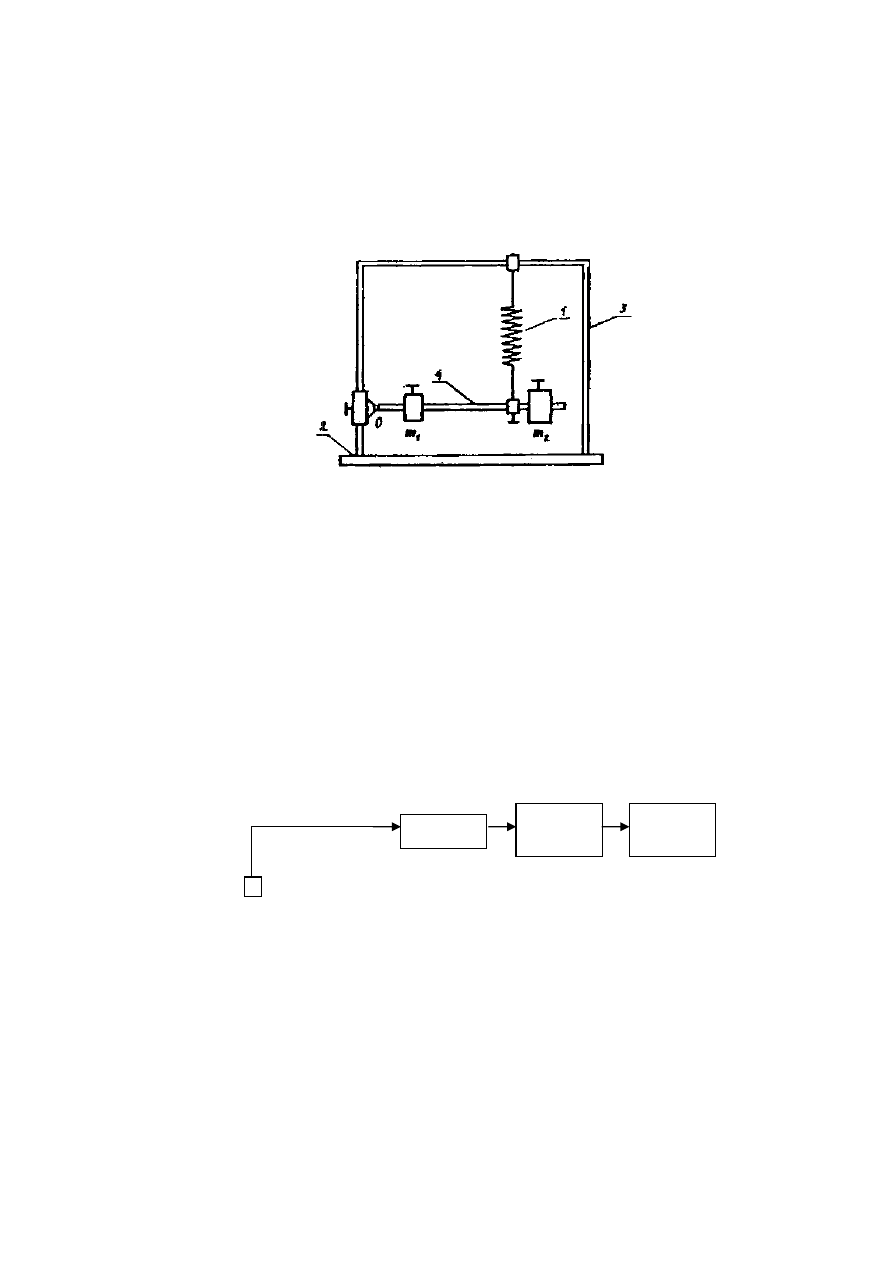
Opis stanowiska
Stanowisko laboratoryjne składa si
a) Cz
ęść
mechaniczna
Rys.3. Schemat stanowiska pomiarowego: 1
dyssypatywny), 2 –
Ć
wiczenie przeprowadza si
przymocowana rama (3). Najwa
wymiennymi ci
ęż
arkami m
miejscach – przegubowo
dyssypatywny).
b) Cz
ęść
elektroniczna
Rys.
Pierwszym elementem elektroniczn
przetwornik drga
ń
mocowany do
transformacj
ę
wielko
ś
ci mechanicz
elektryczny o napi
ę
ciu proporcjonalnym do przyspieszania drga
Czujnik
przyspieszeń
drgań
jne składa si
ę
z dwóch cz
ęś
ci: mechanicznej i elektronicznej
Schemat stanowiska pomiarowego: 1 – spr
ęż
yna (element spr
– podstawa, 3 – rama, 4 – pr
ę
t mocowany przegubowo.
przeprowadza si
ę
na specjalnym przyrz
ą
dzie: Do podstawy (2) jest
Najwa
ż
niejsza cz
ęść
układu, a mianowicie stalowy pr
m
1
i m
2
o ró
ż
nych masach, jest doł
ą
czona do ramy w dwóch
przegubowo w punkcie 0 oraz poprzez spr
ęż
yn
ę
(1) (element spr
Rys. 4. Schemat blokowy układu badawczego
Pierwszym elementem elektronicznego układu pomiarowego jest pie
mocowany do elementu układu mechanicznego. Umo
ci mechanicznych na elektryczne. Z przetwornika uzyskujemy sygnał
ciu proporcjonalnym do przyspieszania drga
ń
. Nast
Wzmacniacz
Filtr
dolno-
przepustowy
Oscyloskop
ci: mechanicznej i elektronicznej.
yna (element spr
ęż
ysto-
t mocowany przegubowo.
dzie: Do podstawy (2) jest
a mianowicie stalowy pr
ę
t (4) wraz z
ą
czona do ramy w dwóch
ę
(1) (element spr
ęż
ysto-
Schemat blokowy układu badawczego
ego układu pomiarowego jest piezoelektryczny
du mechanicznego. Umo
ż
liwia on
Z przetwornika uzyskujemy sygnał
ń
. Nast
ę
pnie sygnał ten
Oscyloskop
cyfrowy
musi by
ć
wzmocniony. Aby ograniczy
znajduje si
ę
cz
ę
stotliwo
ść
dolnoprzepustowy. Filtr ten ogranicza wpływ zakłóce
badana. Sygnał jest rejestrowany za pomoc
Przebieg
ć
wiczenia
Eksperyment najlepiej przeprowadzi
Badania nale
ż
y przeprowadzi
i /lub spr
ęż
ysto
ś
ci) w celu porównania wpływu okre
i sztywno
ś
ci na identyfikowane parametry.
Dla wybranego układu mechanicznego (rys.3) okre
- mas
ę
m
1
i m
2
(+masa czujnika).
- długo
ść
pr
ę
ta l ,
- współrz
ę
dn
ą
mocowania masy skupionej
- g
ę
sto
ść
materiału pr
ę
-
ś
rednic
ę
pr
ę
ta d (przyj
Nast
ę
pnie nale
ż
y pobudzi
ć
i zarejestrowa
ć
przebieg drga
warto
ś
ci kolejnych maksymalnych przemieszcze
dla dodatniej i ujemnej cz
ęś
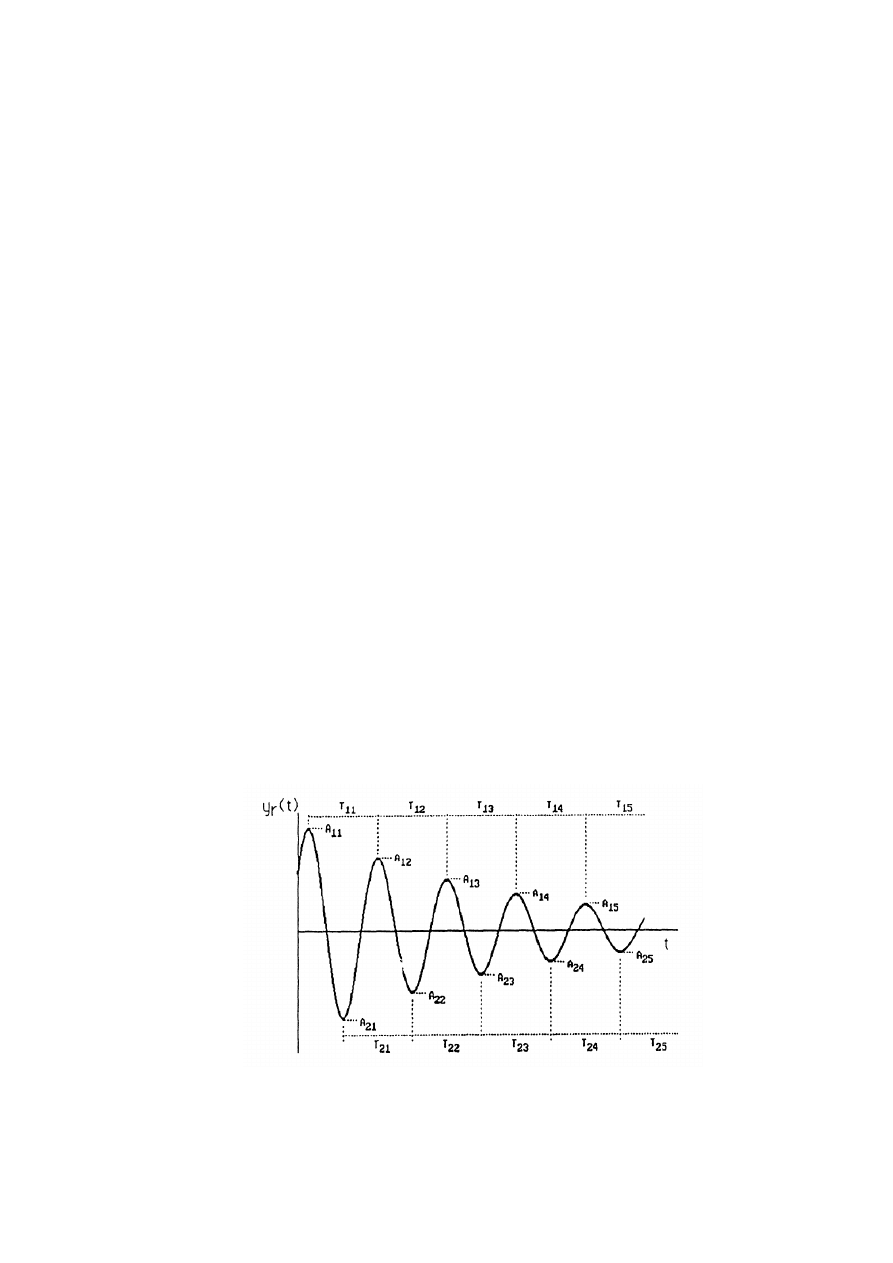
Rys.5. Wykres drga
ń
swobodnych tłumionych; oznaczenia pomocne przy obliczaniu okresu
drga
ń
swobodnych tłumionych T i logarytmicznego dekrementu tłumienia
Aby ograniczy
ć
pasmo cz
ę
stotliwo
ś
ci sygnału do zakresu, w którym
ść
drga
ń
zanikaj
ą
cych badanego układu, zastosowano filtr
Filtr ten ogranicza wpływ zakłóce
ń
o wy
ż
szych cz
badana. Sygnał jest rejestrowany za pomoc
ą
oscyloskopu cyfrowego.
Eksperyment najlepiej przeprowadzi
ć
zgodnie z podanymi poni
ż
ej wytycznymi.
y przeprowadzi
ć
dwukrotnie (dla dwóch ró
ż
nych rozmieszcze
w celu porównania wpływu okre
ś
lonego rozmieszczenia mas
ci na identyfikowane parametry.
Dla wybranego układu mechanicznego (rys.3) okre
ś
li
ć
nast
ę
puj
ą
ce warto
masa czujnika).
mocowania masy skupionej l
1
i l
2
,
pr
ę
ta (dla stali
ρ
= 7800 [kg/m
3
]),
(przyj
ąć
przekrój jako okr
ą
gły).
y pobudzi
ć
układ do drga
ń
(wychyli
ć
układ z poło
przebieg drga
ń
zanikaj
ą
cych na oscyloskopie cyfrowym. Zarejestrowa
ci kolejnych maksymalnych przemieszcze
ń
układu A
ij
oraz czasu ich wyst
ęś
ci wykresu (rys. 5.).
swobodnych tłumionych; oznaczenia pomocne przy obliczaniu okresu
swobodnych tłumionych T i logarytmicznego dekrementu tłumienia
ci sygnału do zakresu, w którym
cych badanego układu, zastosowano filtr
szych cz
ę
stotliwo
ś
ciach ni
ż
oscyloskopu cyfrowego.
ej wytycznymi.
ż
nych rozmieszcze
ń
mas
lonego rozmieszczenia mas
ą
ce warto
ś
ci:
układ z poło
ż
enia równowagi)
cych na oscyloskopie cyfrowym. Zarejestrowa
ć
oraz czasu ich wyst
ą
pienia t
ij
swobodnych tłumionych; oznaczenia pomocne przy obliczaniu okresu
swobodnych tłumionych T i logarytmicznego dekrementu tłumienia
Obliczy
ć
ś
redni
ą
warto
ść
okresu drga
ń
swobodnych T
ś
r
i logarytmicznego dekrementu
tłumienia
∆
ś
r
zgodnie z zale
ż
no
ś
ciami:
,
1
1
2
1
1
2
1
1
+
=
∑
∑
=
=
m
j
j
n
j
j
ś
r
T
m
T
n
T
(17)
gdzie:
1
+
−
=
ij
ij
ij
t
t
T
,
+
=
∆
∑
∑
=
+
=
+
l
j
j
j
k
j
j
j
ś
r
A
A
l
A
A
k
1
1
2
2
1
1
1
1
1
ln
1
ln
2
1
.
(18)
Korzystaj
ą
c
z
wspomnianych
wcze
ś
niej
wzorów
obliczy
ć
warto
ś
ci
zredukowanego współczynnika tłumienia c
z
i zredukowanej sztywno
ś
ci k
z
.
Podawanie wyniku bez oszacowania niepewno
ś
ci pomiarowych nie daje pełnego
opisu warto
ś
ci pomiaru, dlatego te
ż
nale
ż
y uwzgl
ę
dni
ć
wyniki oblicze
ń
poszczególnych
warto
ś
ci wraz z oszacowanymi warto
ś
ciami „bł
ę
du”.
Dalej zakłada
ć
b
ę
dziemy,
ż
e najistotniejszym składnikiem niepewno
ś
ci jest składnik
losowy.
Oszacowanie niepewno
ś
ci pomiarowej logarytmicznego dekrementu tłumienia ma posta
ć
:
2
1
1
2
2
1
1
1
1
1
1
1
2
1
1
1
2
1
δ
δ
∆
+
∆
=
∆∆
∑
∑
=
+
=
+
l
j
j
j
k
j
j
j
sr
A
A
l
A
A
k
(19)
gdzie
1
δ
∆
i
2
δ
∆
stanowi
ą
rozszerzone odchylenia standardowe od
ś
redniej dla stosunku
kolejnych amplitud, odpowiednio dla cz
ęś
ci dodatniej i ujemnej. Ogólnie wi
ę
c, przy
przyj
ę
ciu współczynnika rozszerzenia 3 otrzymamy:
∑
∑
=
=
+
+
−
−
=
∆
N
i
N
j
j
j
i
i
A
A
N
A
A
N
N
1
2
1
1
1
1
)
1
(
1
3
δ
(20)
Podobny tok post
ę
powania mo
ż
na zastosowa
ć
dla oszacowania niepewno
ś
ci pomiarowej
okresu T.
Warto
ść
ś
redni
ą
okresu obliczamy z wzoru (17) co zapiszemy jeszcze raz w postaci:
(
)
2
1
2
1
T
T
T
+
=
,
(21)
gdzie:
∑
=
=
n
i
i
T
n
T
1
1
1
1
, -
ś
redni okres dla cz
ęś
ci dodatniej wykresu,
∑
=
=
m
i
i
T
m
T
1
2
2
1
, -
ś
redni okres dla cz
ęś
ci ujemnej wykresu,
Ostateczne oszacowanie niepewno
ś
ci pomiarowej okresu drga
ń
nale
ż
y wyznaczy
ć
z:
2
1
2
1
2
1
T
T
T
∆
+
∆
=
∆
,
(22)
gdzie:
1
1
T
T
σ
=
∆
,
2
2
T
T
σ
=
∆
,
a
2
1
T
T
i
z
σ
σ
obliczamy jak poprzednio, przyjmuj
ą
c wzór na odchylenie standardowe
i zało
ż
enie o rozkładzie normalnym bł
ę
du, oraz współczynnik rozszerzenia 3. Niepewno
ś
ci
oszacowania kolejnych wyznaczanych wielko
ś
ci (wzory 16) wykonuje si
ę
przenosz
ą
c
wyznaczone niepewno
ś
ci zgodnie z regułami przenoszenia bł
ę
dów.
Szczegółowe kroki oblicze
ń
znajduj
ą
si
ę
w arkuszu sprawozdania.
Wyszukiwarka
Podobne podstrony:
cw6 zmydlanie estru id 123702 Nieznany
cw6 2 id 123631 Nieznany
3 Alarmy wariant 1 grupa B id Nieznany (2)
GRI cw6 id 195773 Nieznany
CW2 INST v2014 id 123147 Nieznany
Analiza wariancji id 61707 Nieznany (2)
cwiczenia 3 Warianty Q id 66502 Nieznany
Elektronika cw6 sprawko id 1589 Nieznany
cw6 6 id 123641 Nieznany
analiza wariancji 2 id 61709 Nieznany (2)
6 RLC mostki cw6 id 612202 Nieznany
cw6 id 123625 Nieznany
M INST inf s id 274726 Nieznany
analiza wariancji 1 id 61710 Nieznany (2)
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
więcej podobnych podstron