1. CAŁKI KRZYWOLINIOWE NIEZORIENTOWANE
1.1 ŁUKI NA PŁASZCZYŹNIE I W PRZESTRZENI
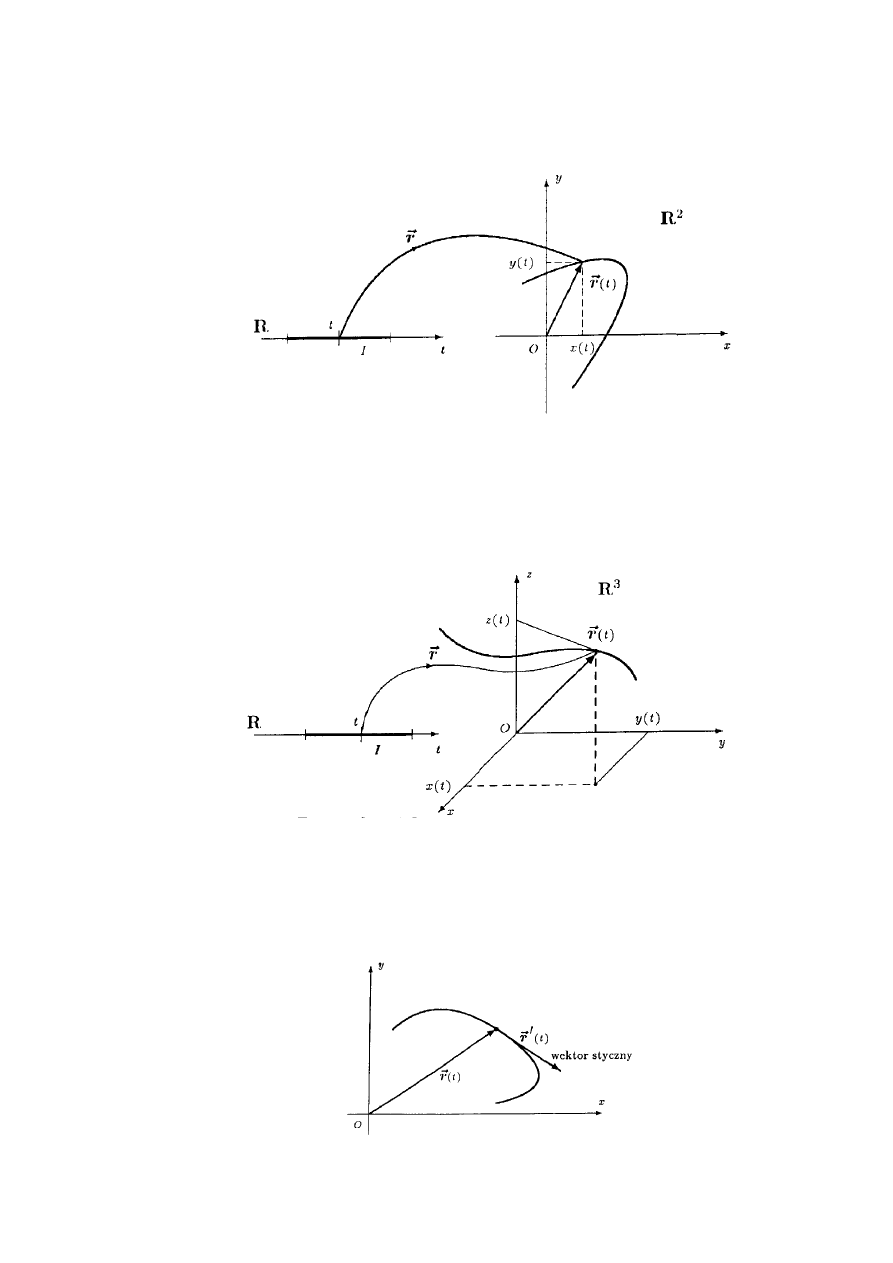
Def. 1.1.1 (funkcja wektorowa jednej zmiennej)
a) Funkcją wektorową jednej zmiennej nazywamy odwzorowanie
2
:
R
I
r
lub
3
:
R
I
r
, gdzie I oznacza przedział na
prostej. Funkcje wektorowe będziemy zapisywali odpowiednio w postaci
)
(
),
(
)
(
t
y
t
x
t
r
lub
)
(
),
(
),
(
)
(
t
z
t
y
t
x
t
r
,
gdzie t
I.
Rys. 1.1.1 Funkcja wektorowa jednej zmiennej na płaszczyźnie
b) Mówimy, że funkcja wektorowa
r
jest różnowartościowa na przedziale I, gdy dla dowolnych t
1
, t
2
I prawdziwa jest
implikacja
)
(
)
(
2
1
2
1
t
r
t
r
t
t
.
Funkcja
r
jest lokalnie różnowartościowa na przedziale I, jeżeli każdy punkt tego przedziału ma otoczenie, na którym
funkcja
r
jest różnowartościowa.
Rys. 1.1.2 Funkcja wektorowa jednej zmiennej w przestrzeni
c) Jeżeli funkcje x, y lub x, y, z są ciągłe na przedziale I, to mówimy, że funkcja wektorowa
r
jest ciągła na I.
d) Podobnie, jeżeli funkcje x, y lub x, y, z są różniczkowalne w sposób ciągły na I, to mówimy, że funkcja wektorowa
r
jest
różniczkowalna w sposób ciągły na I. Pochodną funkcji wektorowej
r
określamy wzorem:
)
(
),
(
)
(
/
/
/
t
y
t
x
t
r
def
lub
)
(
),
(
),
(
)
(
/
/
/
/
t
z
t
y
t
x
t
r
def
.
Rys. 1.1.3 Pochodna funkcji wektorowej
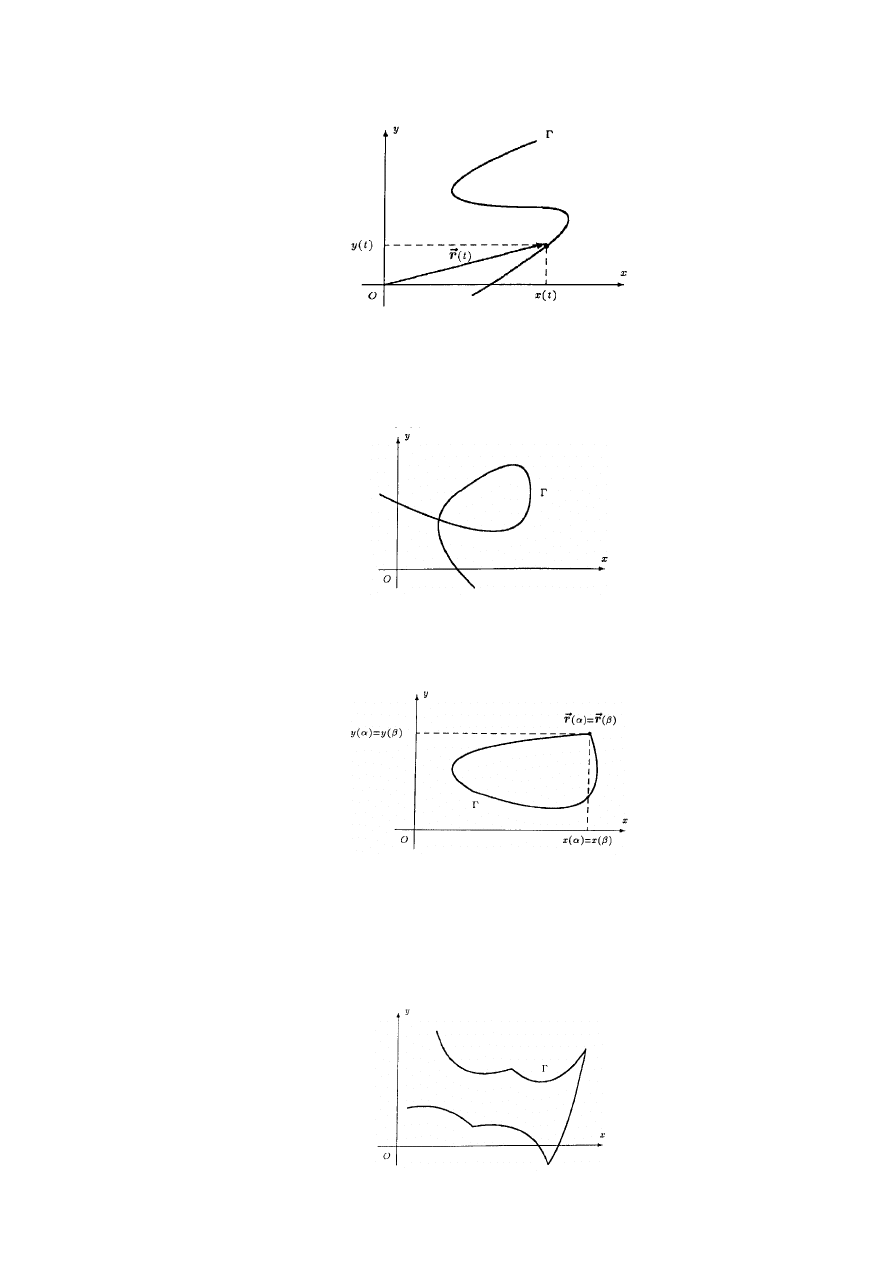
Def. 1.1.2 (łuki na płaszczyźnie)
a) Niech funkcja
2
]
,
[
:
R
r
będzie ciągła i różnowartościowa na przedziale [
,
]. Łukiem zwykłym na płaszczyźnie
nazywamy zbiór:
]
,
[
:
)
(
t
t
r
.
Rys. 1.1.4 Łuk zwykły na płaszczyźnie
b) Niech funkcja
2
:
R
I
r
, gdzie I oznacza dowolny odcinek, półprostą lub prostą (z końcem lub nie), będzie ciągła i
lokalnie różnowartościowa na I. Łukiem na płaszczyźnie nazywamy zbiór:
I
t
t
r
:
)
(
.
Rys. 1.1.5 Łuk na płaszczyźnie
c) Jeżeli dla łuku
]
,
[
:
)
(
t
t
r
spełniona jest równość
)
(
)
(
r
r
, to mówimy, że łuk ten jest zamknięty. W
przeciwnym przypadku mówimy, że łuk
jest niezamknięty.
Rys. 1.1.6 Łuk zamknięty na płaszczyźnie
d) Jeżeli funkcja
r
w definicji łuku zwykłego jest różniczkowalna w sposób ciągły na [
,
] oraz dla każdego t
[
,
] speł-
niony jest warunek:
O
t
r
)
(
,
to mówimy, że łuk ten jest gładki. Mówimy, że łuk jest kawałkami gładki, jeżeli można go podzielić na skończoną liczbę
łuków gładkich.
Rys. 1.1.7 Łuk kawałkami gładki na płaszczyźnie
Uwaga. Podobnie definiuje się łuki analogicznych rodzajów w przestrzeni. Funkcję wektorową
r
lub funkcje x, y, z opisujące
łuk
nazywamy jego parametryzacją. Obrazowo łuk zwykły można przedstawić jako powyginany odcinek ma płaszczyźnie
lub w przestrzeni. Wyginany odcinek można wydłużać lub skracać, ale nie wolno go rozrywać ani sklejać.
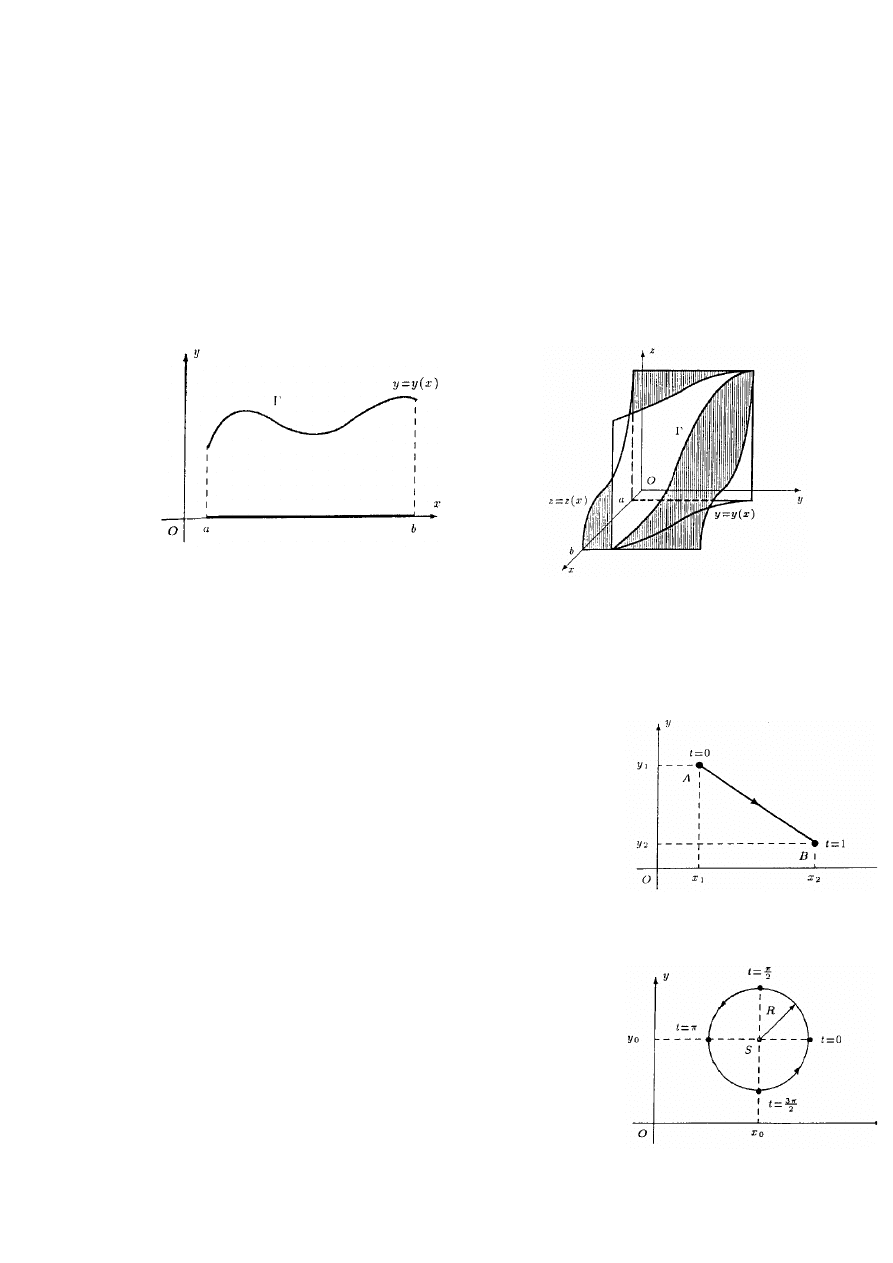
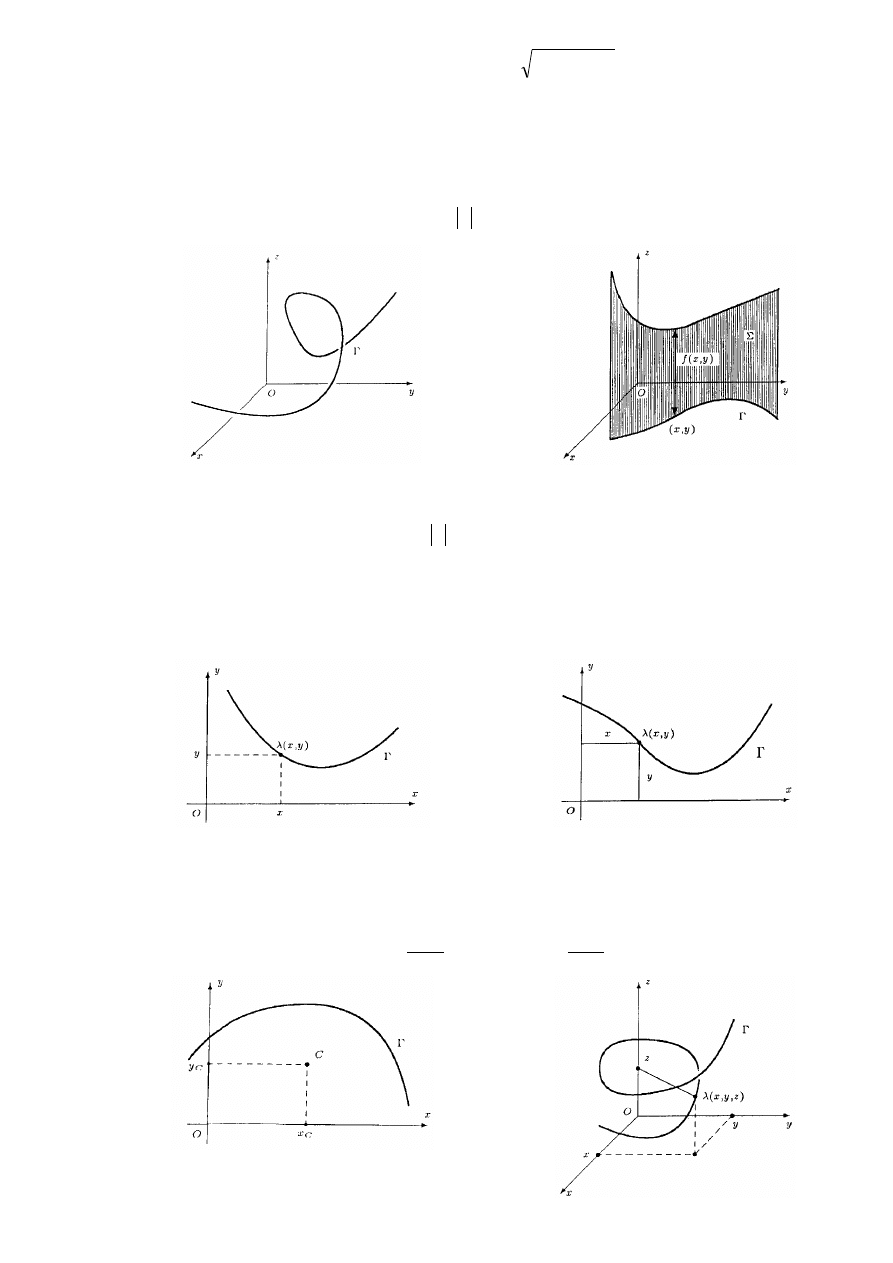
Fakt 1.1.3 (o przedstawianiu łuków na płaszczyźnie i w przestrzeni)
Łukami na płaszczyźnie są wykresy funkcji ciągłych postaci:
1.
: y = y(x), a
x
b
,
2.
: x = x(y), c
y
d
.
Łukami w przestrzeni są części wspólne ciągłych powierzchni walcowych:
3.
]
,
[
)
(
)
(
:
b
a
x
x
z
z
x
y
y
4.
]
,
[
)
(
)
(
:
d
c
y
y
z
z
y
x
x
5.
]
,
[
)
(
)
(
:
q
p
z
z
y
y
z
x
x
Jeżeli funkcje x, y, z mają ciągłe pierwsze pochodne, to łuki
są gładkie.
Rys. 1.1.8 Łuk
jest wykresem funkcji y = y(x),
gdzie x
[a,b]
Rys. 1.1.9 Łuk
jest wspólną częścią powierzchni
walcowych y = y(x) oraz z = z(x), gdzie x
[a,b]
Fakt 1.1.4 (parametryzacje ważniejszych łuków na płaszczyźnie i w przestrzeni)
1. Odcinek AB o końcach A = (x
1
,y
1
), B = (x
2
,y
2
) ma przedstawienie parametryczne:
]
1
,
0
[
)
(
)
(
1
2
1
1
2
1
t
t
y
y
y
y
t
x
x
x
x
.
2. Okrąg o środku w punkcie S = (x
0
,y
0
) i promieniu R > 0 ma przedstawienie parametryczne:
]
2
,
0
[
sin
cos
0
0
t
t
R
y
y
t
R
x
x
.
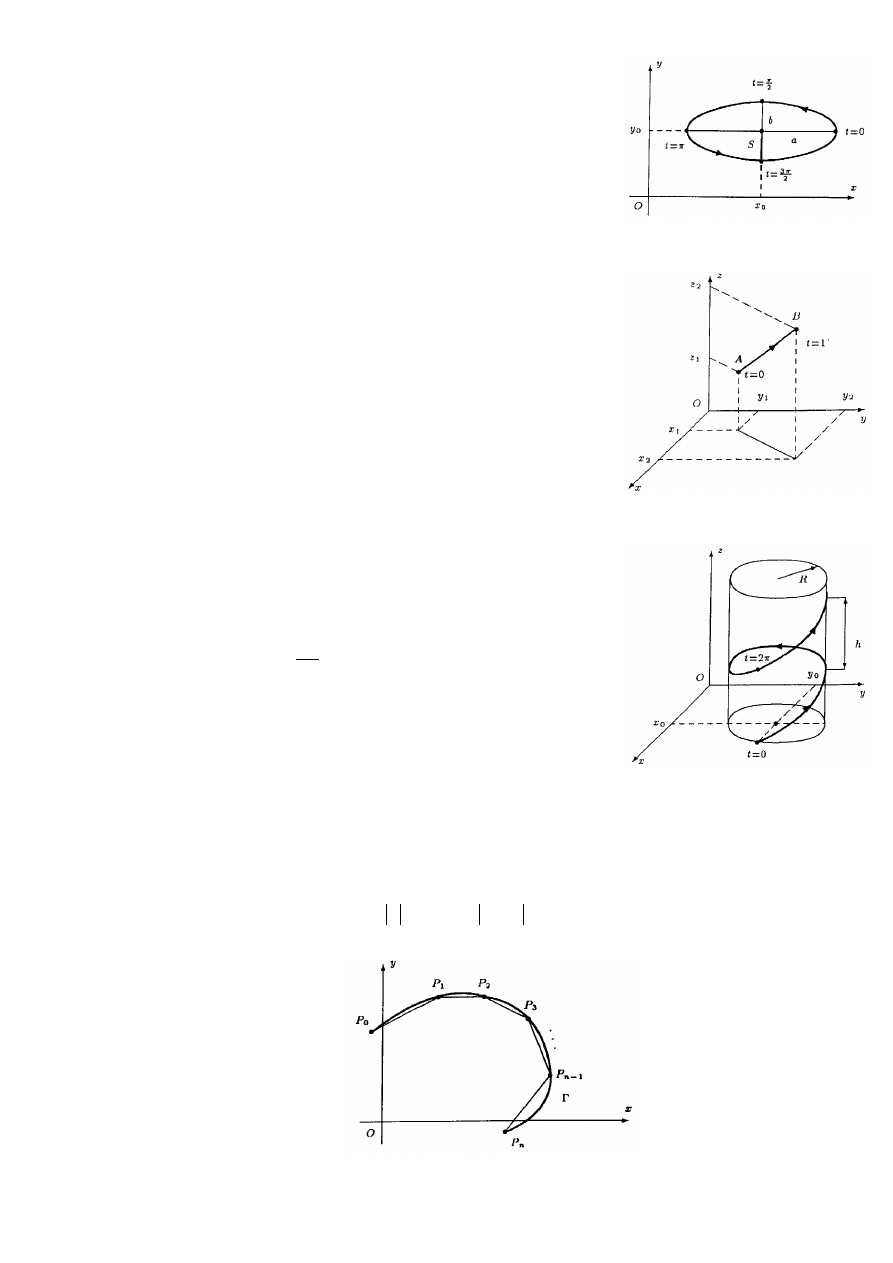
3. Elipsa o środku w punkcie S = (x
0
,y
0
) i półosiach a > 0, b > 0 ma przedstawienie parametryczne:
]
2
,
0
[
sin
cos
0
0
t
t
b
y
y
t
a
x
x
.
4. Odcinek AB o końcach A = (x
1
,y
1
,z
1
), B = (x
2
,y
2
,z
2
) ma przedstawienie parametryczne:
]
1
,
0
[
)
(
)
(
)
(
1
2
1
1
2
1
1
2
1
t
t
z
z
z
z
t
y
y
y
y
t
x
x
x
x
.
5. Linia śrubowa o skoku h > 0, nawinięta na walec (x – x
0
)
2
+ (y – y
0
)
2
= R
2
, gdzie R > 0, ma przedstawienie parametryczne:
R
t
t
h
z
t
R
y
y
t
R
x
x
2
sin
cos
0
0
.
Jeden zwój linii śrubowej otrzymamy, gdy t
[0,2
].
Uwaga. Równania fragmentów łuków określonych wyżej otrzymamy zmniejszając odpowiednio zakres zmienności parametru
t. Na rysunkach strzałką zaznaczono kierunek przebiegu łuków przy wzroście parametru t.
Def. 1.1.5 (długość łuku)
Długością łuku nazywamy kres górny długości łamanych wpisanych w ten łuk;
1
0
1
:
sup
n
i
i
i
i
N
n
def
P
P
P
.
Rys. 1.1.10 Długość łuku
Tw. 1.1.6 (długość łuku)
Niech
= {(x(t), y(t)) :
t
} będzie łukiem gładkim na płaszczyźnie. Wtedy długość tego łuku wyraża się wzorem:
dt
t
y
t
x
2
/
2
/
)
(
)
(
.
Podobnie, niech
= {(x(t), y(t), z(t)) :
t
} będzie łukiem gładkim w przestrzeni. Wtedy długość tego łuku wyraża się
wzorem:
dt
t
z
t
y
t
x
2
/
2
/
2
/
)
(
)
(
)
(
.
Uwaga. Jeżeli łuk
jest wykresem funkcji y = y(x), a
x
b, to jego długość wyraża się wzorem:
b
a
dx
x
y
2
/
)
(
1
.
1.2 DEFINICJE I WŁASNOŚCI CAŁEK KRZYWOLINIOWYCH NIEZORIENTOWANYCH
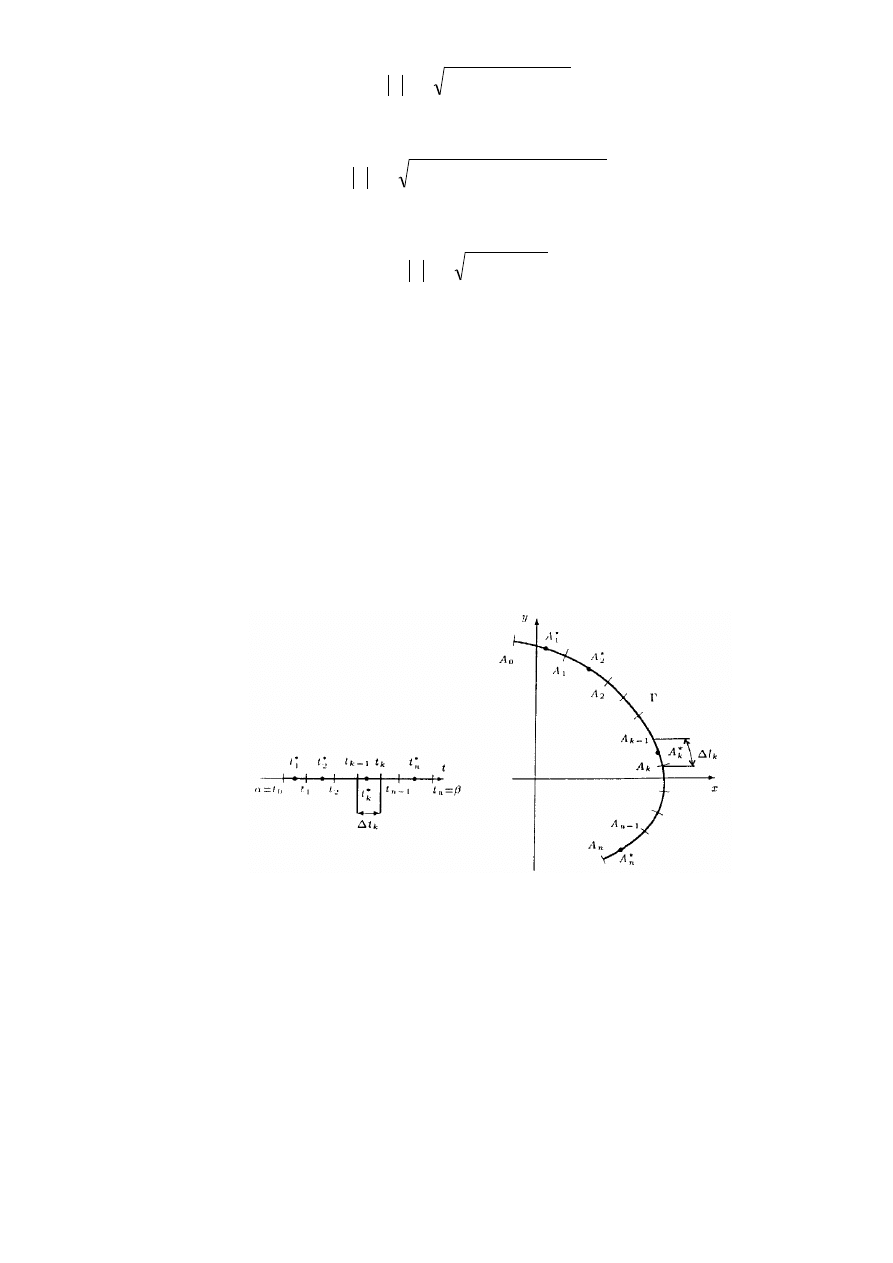
Oznaczenia w definicji całki krzywoliniowej niezorientowanej
Niech
= {(x(t), y(t)) : t
[
,
]} będzie łukiem gładkim na płaszczyźnie. Wprowadzamy następujące oznaczenia:
P = {t
0
, t
1
, ..., t
n
}, gdzie
= t
0
< t
1
< … < t
n
=
– podział odcinka [
,
] na n
N odcinków;
t
k
= t
k
– t
k-1
– długość k-tego odcinka podziału
P, 1
k
n;
(
P) = max{
t
k
: 1
k
n } – średnica podziału
P;
n
t
t
t
,
,
,
2
1
, gdzie
]
,
[
1
k
k
k
t
t
t
dla 1
k
n – zbiór punktów pośrednich podziału
P.
A
k
= (x(t
k
),y(t
k
)) – punkty podziału łuku
indukowane przez podział
P, 0
k
n;
)
(
),
(
)
,
(
k
k
k
k
k
t
y
t
x
y
x
A
– punkty pośrednie na łuku A
k-1
A
k
indukowane przez wybór punktów pośrednich podziału
P, 1
k
n;
l
k
– długość łuku A
k-1
A
k
,1
k
n.
Rys. 1.2.1 Podział odcinka [
,
] i podział łuku
indukowany przez podział tego odcinka
Def. 1.2.1 (całka krzywoliniowa niezorientowana)
Niech f będzie funkcją dwóch zmiennych określoną i ograniczoną na łuku gładkim
. Całkę krzywoliniową niezorientowaną z
funkcji f po łuku
definiujemy wzorem:
n
k
k
k
k
def
l
y
x
f
dl
y
x
f
1
0
)
(
)
,
(
lim
)
,
(
P
,
o ile granica po prawej stronie znaku równości nie zależy od sposobu podziału P odcinka [
,
], ani od sposobu wyboru
punktów pośrednich
.
Uwaga. Wartość całki krzywoliniowej nie zależy od wybranej parametryzacji łuku. Całkę krzywoliniową niezorientowaną z
funkcji trzech zmiennych po łuku położonym w przestrzeni definiujemy analogicznie. Całkę krzywoliniową niezorientowaną
na płaszczyźnie jak i w przestrzeni oznaczamy krótko symbolem
dl
f
.
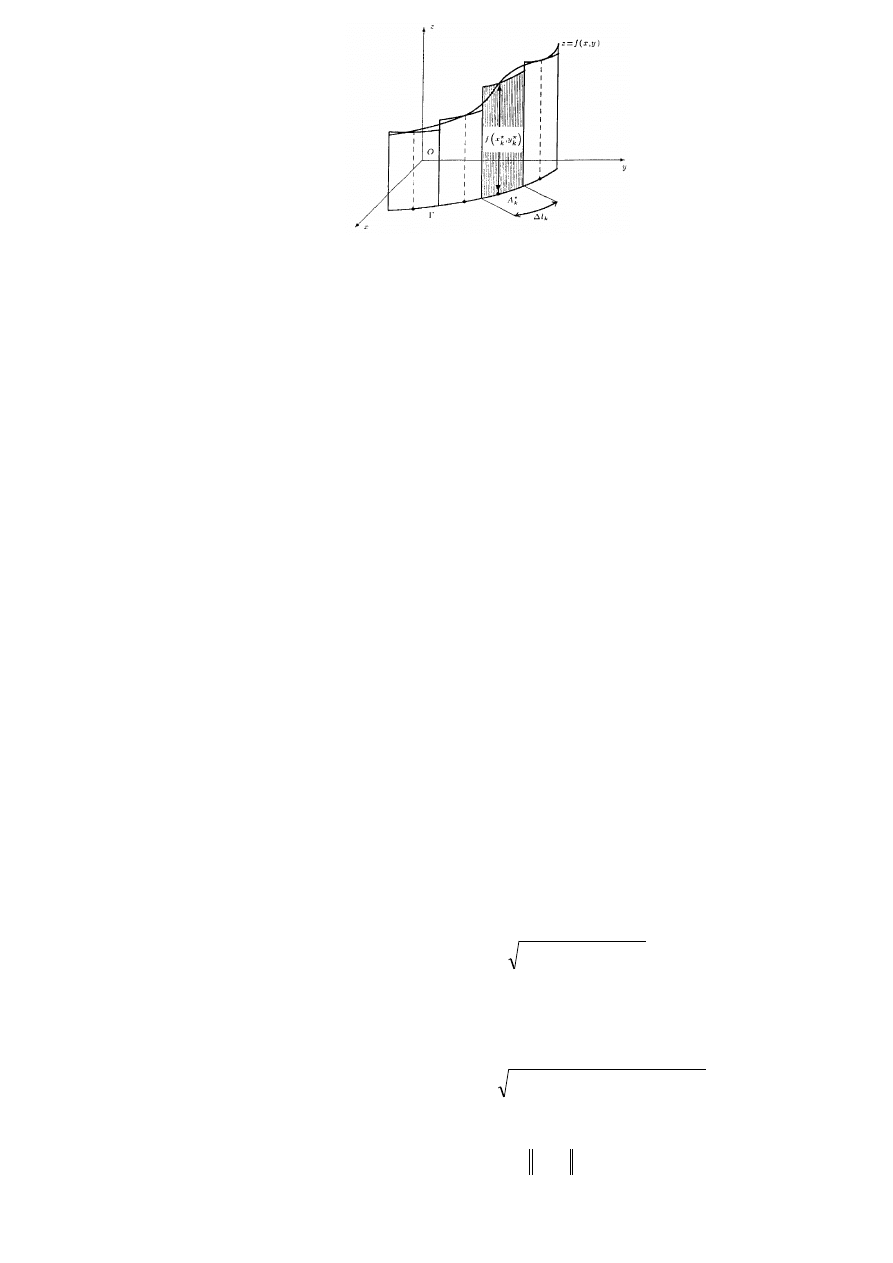
Rys. 1.2.2 Ilustracja do definicji całki krzywoliniowej niezorientowanej
Def. 1.2.2 (całka krzywoliniowa po łuku kawałkami gładkim)
Niech
będzie łukiem kawałkami gładkim złożonym z łuków gładkich
1
,
2
, …,
m
oraz niech f będzie funkcją określoną i
ograniczoną na łuku
. Całkę krzywoliniową niezorientowaną z funkcji f po łuku
definiujemy wzorem:
m
dl
f
dl
f
dl
f
dl
f
def
...
2
1
,
o ile całki po prawej stronie znaku równości istnieją.
Tw. 1.2.3 (liniowość całki krzywoliniowej niezorientowanej)
Jeżeli istnieją całki krzywoliniowe niezorientowane z funkcji f i g po kawałkami gładkim łuku
i c
R, to:
a) istnieje całka krzywoliniowa niezorientowana z funkcji f + g po łuku
oraz
dl
g
dl
f
dl
g
f
)
(
,
b) istnieje całka krzywoliniowa niezorientowana z funkcji cf po łuku
oraz
dl
f
c
dl
cf
.
Def 1.2.4 (całka krzywoliniowa niezorientowana z funkcji wektorowej)
Niech
będzie łukiem kawałkami gładkim na płaszczyźnie oraz niech funkcje P i Q będą całkowalne na
. Całkę krzywoli-
niową niezorientowaną po łuku
z funkcji wektorowej
)
,
(
),
,
(
)
,
(
y
x
Q
y
x
P
y
c
F
określamy wzorem:
dl
y
x
Q
dl
y
x
P
dl
y
x
F
def
)
,
(
,
)
,
(
)
,
(
.
Uwaga. Podobnie określa się całkę krzywoliniową niezorientowaną z funkcji wektorowej
)
,
(
),
,
(
),
,
(
)
,
(
y
x
R
y
x
Q
y
x
P
y
c
F
po łuku położonym na płaszczyźnie xOy oraz całkę krzywoliniową niezorientowaną z funkcji wektorowej
)
,
(
),
,
(
),
,
(
)
,
(
y
x
R
y
x
Q
y
x
P
y
c
F
po łuku położonym w przestrzeni.
1.3 ZAMIANA CAŁKI KRZYWOLINIOWEJ NIEZORIENTOWANEJ NA CAŁKĘ POJEDYNCZĄ
Tw. 1.3.1 (o zamianie całki krzywoliniowej niezorientowanej na całkę pojedynczą)
a) Jeżeli
1. łuk
= {(x(t), y(t)) : t
[
,
]} jest gładki i niezamknięty,
2. funkcja f jest ciągła na łuku
,
to
dt
t
y
t
x
t
y
t
x
f
dl
y
x
f
2
/
2
/
)
(
)
(
)
(
),
(
)
,
(
.
b) Podobnie, jeżeli
1. łuk
= {(x(t), y(t), z(t)) : t
[
,
]} jest gładki i niezamknięty,
2. funkcja f jest ciągła na łuku
,
to
dt
t
z
t
y
t
x
t
z
t
y
t
x
f
dl
z
y
x
f
2
/
2
/
2
/
)
(
)
(
)
(
)
(
),
(
),
(
)
,
,
(
.
Uwaga. W zapisie wektorowym powyższe wzory przyjmują jednolitą postać
dt
t
r
t
r
f
dl
r
f
)
(
)
(
)
(
/
.
Jeżeli funkcja f jest ciągła na łuku gładkim
opisanym równaniem y = y(x), gdzie a
x
b, to
b
a
dx
x
y
x
y
x
f
dl
y
x
f
2
/
)
(
1
)
(
,
)
,
(
.
1.4 ZASTOSOWANIA CAŁEK KRZYWOLINIOWYCH NIEZORIENTOWANYCH
Fakt 1.4.1 (zastosowania w geometrii)
1. Długość łuku
na płaszczyźnie lub w przestrzeni wyraża się wzorem:
dl
.
2. Niech
oznacza powierzchnię boczną walca o tworzących przechodzących przez łuk
R
2
. Tworzące walca są równo-
ległe do osi Oz i w punkcie (x,y)
mają długość f(x,y)
0. Wtedy pole powierzchni
wyraża się wzorem:
dl
y
x
f
)
,
(
.
Fakt 1.4.2 (zastosowania w fizyce)
1. Masa łuku materialnego
R
2
o gęstości liniowej masy
wyraża się wzorem:
dl
y
x
M
)
,
(
.
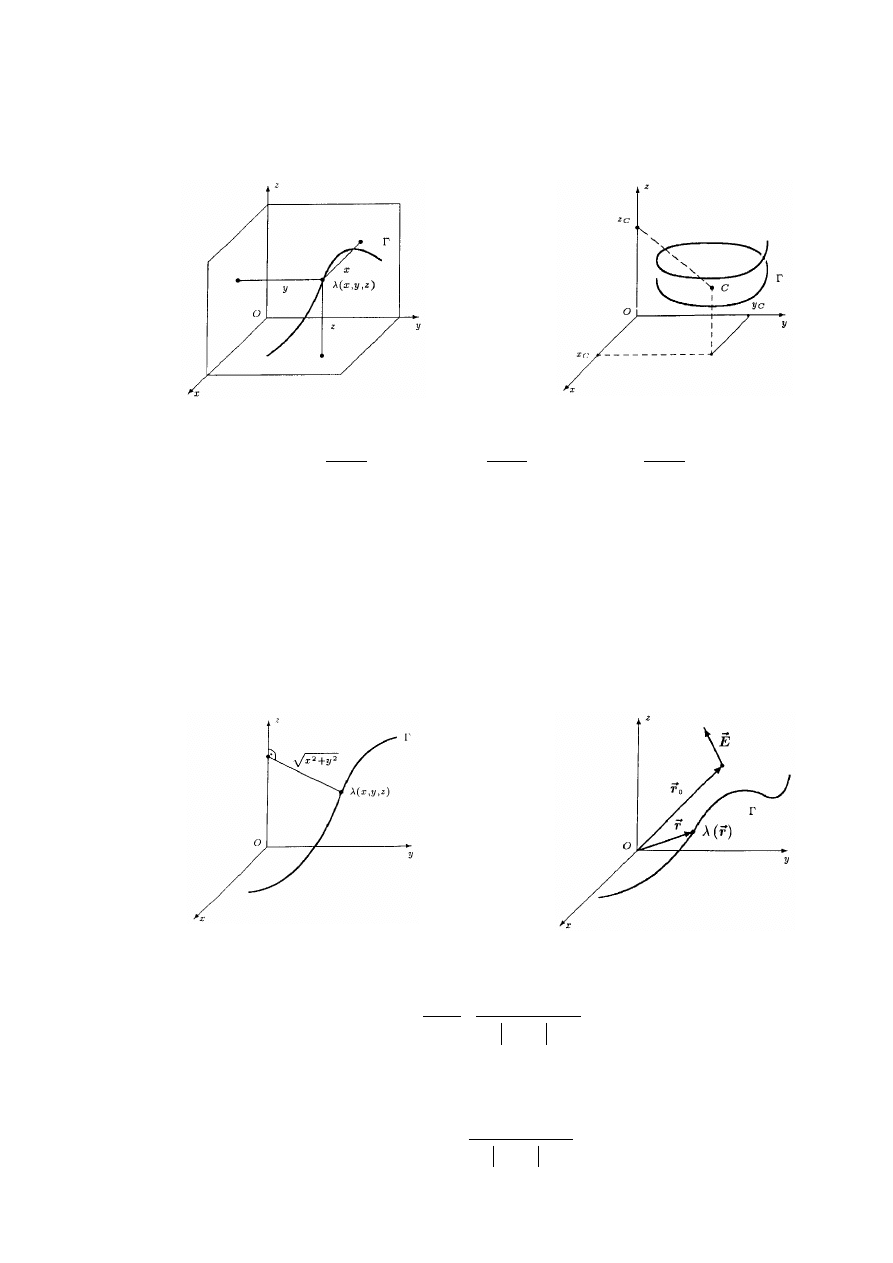
2. Momenty statyczne względem osi układu łuku materialnego
R
2
o gęstości liniowej masy
wyrażają się wzorami:
dl
y
x
y
MS
x
)
,
(
,
dl
y
x
x
MS
y
)
,
(
.
3. Współrzędne środka masy łuku materialnego
R
2
o gęstości liniowej masy
wyrażają się wzorami:
M
MS
x
y
C
,
M
MS
y
x
C
.
4. Masa łuku materialnego
R
3
o gęstości liniowej masy
wyraża się wzorem:
dl
z
y
x
M
)
,
,
(
.
5. Momenty statyczne względem płaszczyzn układu współrzędnych łuku materialnego
R
3
o gęstości liniowej masy
wyrażają się wzorami:
dl
z
y
x
z
MS
xy
)
,
,
(
,
dl
z
y
x
y
MS
xz
)
,
,
(
,
dl
z
y
x
x
MS
yz
)
,
,
(
.
6. Współrzędne środka masy łuku materialnego
R
3
o gęstości liniowej masy
wyrażają się wzorami:
M
MS
x
yz
C
,
M
MS
y
xz
C
,
M
MS
z
xy
C
.
7. Momenty bezwładności względem osi lub początku układu współrzędnych łuku materialnego
R
3
o gęstości liniowej
masy
wyrażają się wzorami:
dl
z
y
x
z
y
I
x
)
,
,
(
2
2
,
dl
z
y
x
z
x
I
y
)
,
,
(
2
2
,
dl
z
y
x
z
x
I
z
)
,
,
(
2
2
,
dl
z
y
x
z
y
x
I
)
,
,
(
2
2
2
0
.
8. Natężenie pola elektrycznego indukowane w punkcie
0
r
przez ładunek elektryczny o gęstości liniowej ładunku
rozło-
żony na łuku
R
2
(R
3
) wyraża się wzorem:
3
0
0
0
)
(
)
(
4
1
r
r
dl
r
r
r
E
,
gdzie
))
,
,
(
(
)
,
(
z
y
x
r
y
x
r
, a
0
oznacza stałą dielektryczną próżni.
9. Siła przyciągania grawitacyjnego masy m skupionej w punkcie
0
r
przez łuk materialny
R
2
(R
3
) o gęstości liniowej
masy
wyraża się wzorem:
3
0
0
)
(
)
(
r
r
dl
r
r
r
Gm
F
,
gdzie
))
,
,
(
(
)
,
(
z
y
x
r
y
x
r
, a G oznacza stałą grawitacji.
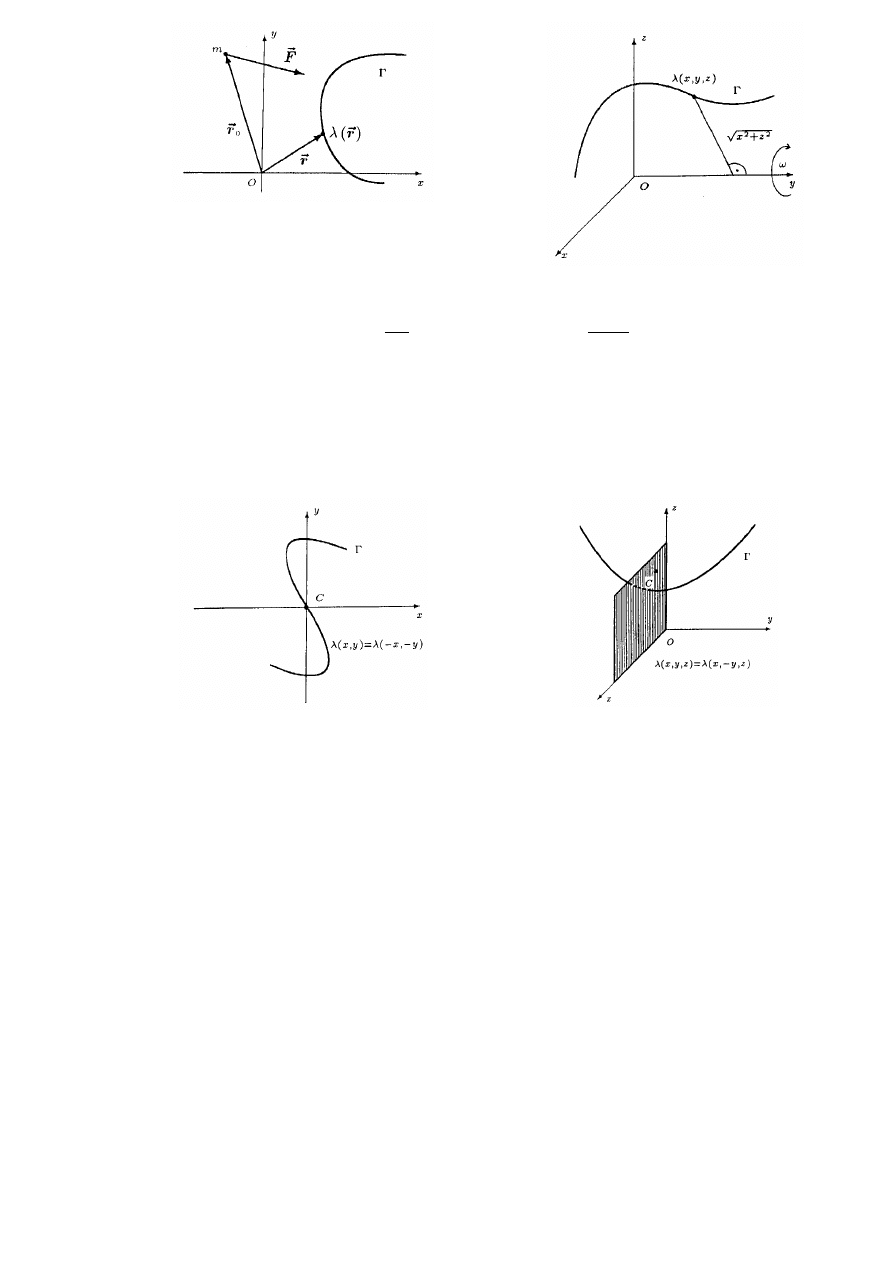
10. Energia kinetyczna łuku materialnego
R
3
o gęstości liniowej masy
, podczas obrotu wokół osi Oy z prędkością ką-
tową
, wyraża się wzorem:
2
)
,
,
(
2
2
2
2
2
y
k
I
dl
z
y
x
z
x
E
.
Uwaga. Wzór na natężenie pola grawitacyjnego jest analogiczny do wzoru na natężenie pola elektrycznego. Także wzór na siłę
przyciągania pochodzącą od ładunków elektrycznych jest analogiczny do wzoru na siłę przyciągania grawitacyjnego.
Fakt 1.4.3 (środki masy łuków symetrycznych)
1. Jeżeli łuk materialny ma środek symetrii i gęstość liniowa masy jest funkcją symetryczną względem tego środka (np. jest
stała), to środek masy łuk pokrywa się z jego środkiem symetrii.
2. Jeżeli łuk materialny ma oś lub płaszczyznę symetrii i gęstość liniowa masy jest funkcją symetryczną odpowiednio wzglę-
dem tej osi lub płaszczyzny (np. jest stała), to środek masy łuku leży na tej osi lub na płaszczyźnie symetrii.
Wyszukiwarka
Podobne podstrony:
,analiza matematyczna 2, calki Nieznany (6)
,analiza matematyczna 2, calki Nieznany (5)
,analiza matematyczna 2, calki Nieznany (3)
cw 13 Analiza Matematyczna (calki) id
,analiza matematyczna 2, elemen Nieznany (2)
Zadania z analizy matematycznej calki
ANALIZA MATEMATYCZNA CAŁKI KRZYWO LINIOWE
,analiza matematyczna 2, rownan Nieznany (2)
,analiza matematyczna 2, uklady Nieznany (2)
,analiza matematyczna 2, rownan Nieznany (3)
cw 13 Analiza Matematyczna (calki) id
,analiza matematyczna 2, elemen Nieznany (2)
więcej podobnych podstron