Automatyka i sterowanie
Krzysztof Marzjan
Typowe człony układów automatycznej regulacji i ich charakterystyki czasowe
2
Automatyka i sterowanie – typowe człony automatyki
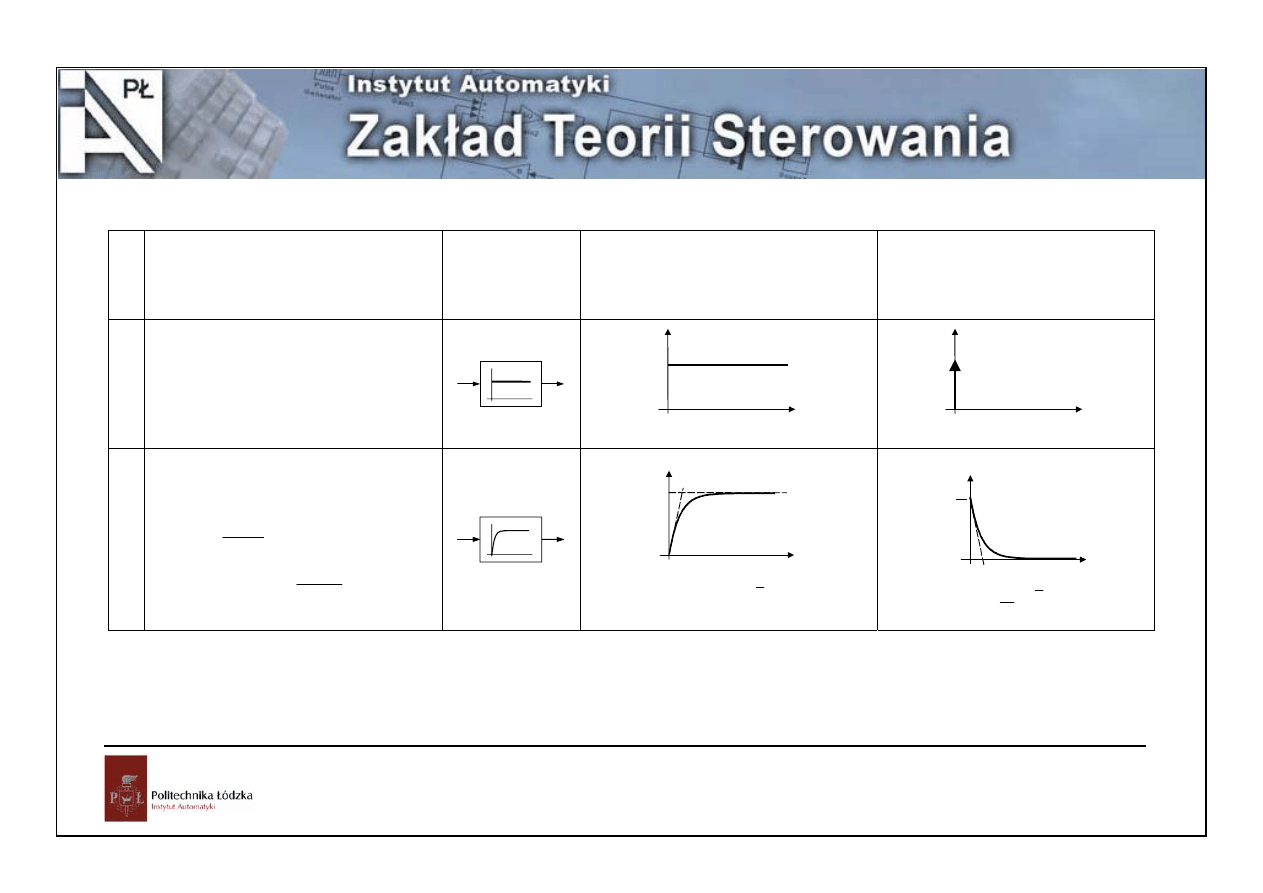
Lp
.
Nazwa członu,
równanie różniczkowe
i transmitancja operatorowa G(s)
Oznaczenie na
schemacie
blokowym
Odpowiedź jednostkowa h(t) Odpowiedź impulsowa g(t)
1.
proporcjonalny
(bezinercyjny)
)
(
k
)
(
t
u
t
y
⋅
=
k
G(s)
=
u(t)
y(t)
0
k
t
h(t)
)
(
1
)
(
t
k
t
h
⋅
=
0
t
g(t)
)
(
)
(
t
k
t
g
δ
⋅
=
2.
inercyjny pierwszego rzędu
)
(
k
)
(
)
(
t
u
t
y
dt
t
dy
T
⋅
=
+
1
k
G(s)
+
=
Ts
u(t)
y(t)
0
k
t
h(t)
T
)
(
1
1
)
(
t
e
k
t
h
T
t
⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
=
−
0
T
k
t
g(t)
T
)
(
1
)
(
t
e
T
k
t
g
T
t
⋅
=
−
3
Automatyka i sterowanie – typowe człony automatyki
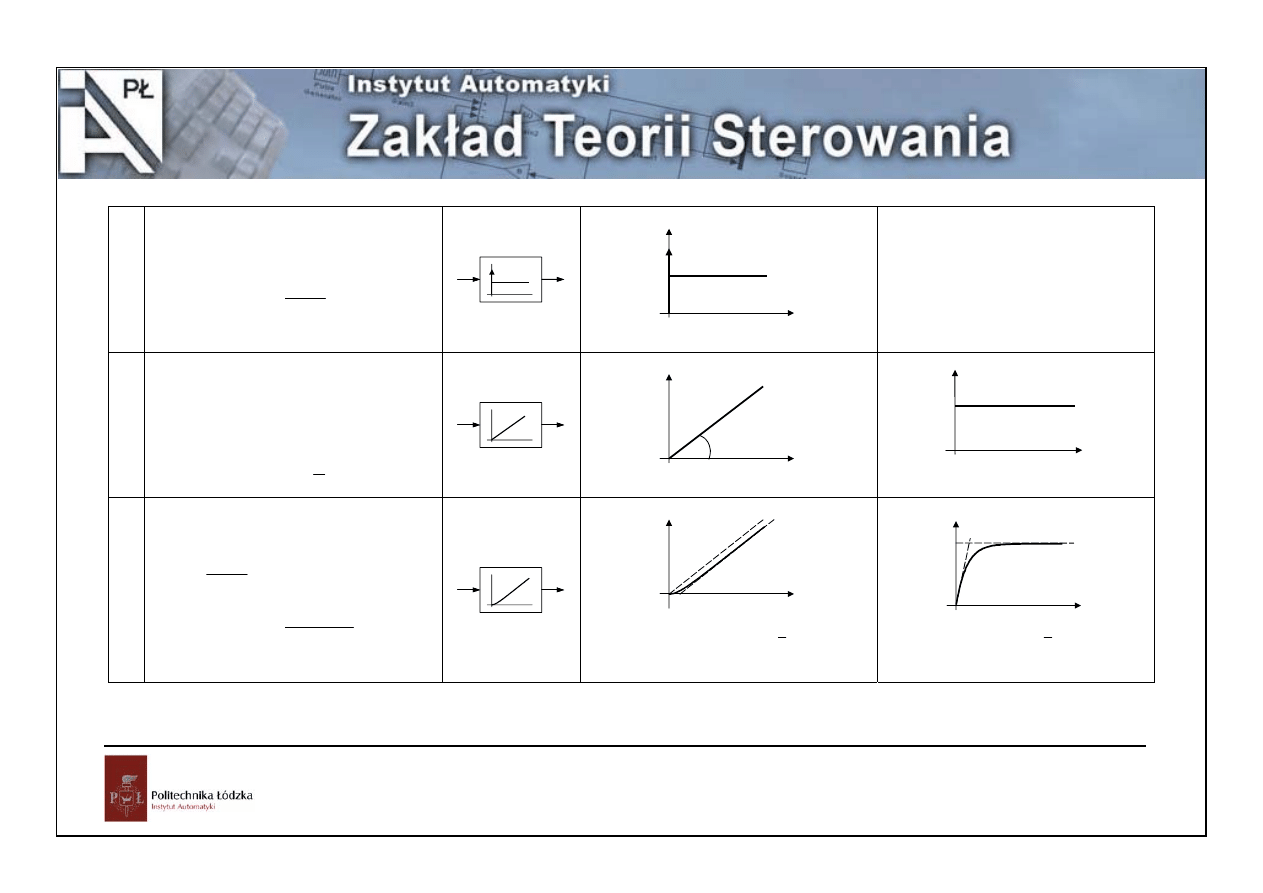
3.
regulator PD
proporcjonalno - różniczkujący
⎥⎦
⎤
⎢⎣
⎡
+
=
)
(
)
(
k
)
(
t
e
dt
t
de
T
t
u
)
1
(
k
G(s)
+
= Ts
e(t)
u(t)
0
k
t
h(t)
(t)
kT
δ
⋅
)
(
1
)
(
)
(
t
k
t
kT
t
h
⋅
+
⋅
=
δ
4.
całkujący idealny
∫
=
t
d
u
t
y
0
)
(
)
(
τ
τ
s
k
G(s)
=
u(t)
y(t)
0
t
h(t)
k=tgα
α
)
(
1
)
(
t
kt
t
h
⋅
=
0
k
t
g(t)
)
(
1
)
(
t
k
t
g
⋅
=
5.
całkujący rzeczywisty
∫
⋅
=
+
t
d
u
t
y
dt
t
dy
T
0
)
(
k
)
(
)
(
τ
τ
)
1
(
k
G(s)
+
=
Ts
s
u(t)
y(t)
0
t
h(t)
k(t-T)
T
kt
)
(
1
1
)
(
t
e
kT
kt
t
h
T
t
⋅
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
=
−
0
k
t
g(t)
T
)
(
1
1
)
(
t
e
k
t
g
T
t
⋅
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
=
−
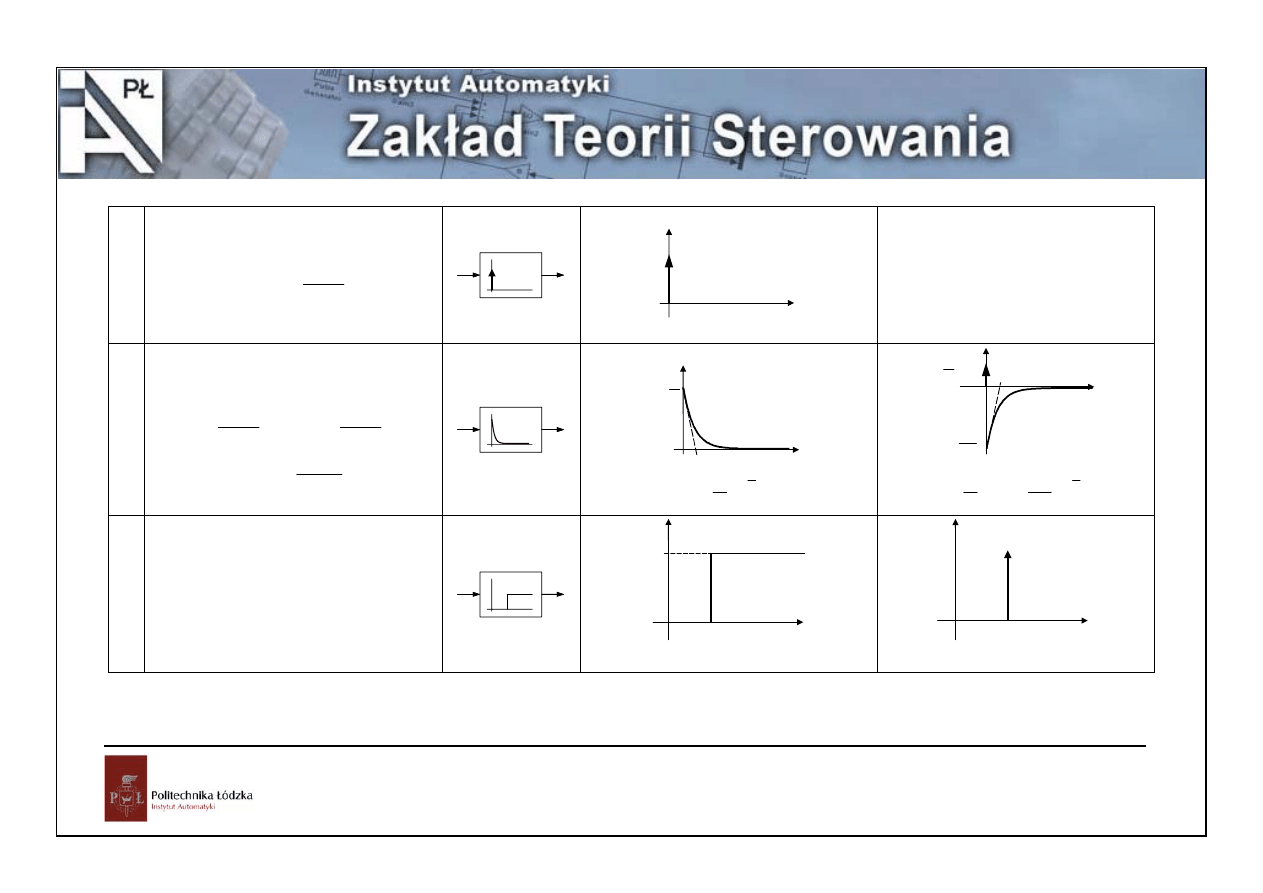
6.
różniczkujący idealny
dt
t
du
k
t
y
)
(
)
(
=
ks
=
G(s)
u(t)
y(t)
0
t
h(t)
)
(
)
(
t
k
t
h
δ
⋅
=
7.
różniczkujący rzeczywisty
dt
t
du
t
y
dt
t
dy
T
)
(
k
)
(
)
(
=
+
1
G(s)
+
=
Ts
ks
u(t)
y(t)
0
T
k
t
h(t)
T
)
(
1
)
(
t
e
T
k
t
h
T
t
⋅
=
−
0
2
T
k
−
t
g(t)
T
)
(
T
k
t
δ
)
(
1
)
(
)
(
2
t
e
T
k
t
T
k
t
g
T
t
⋅
−
=
−
δ
8.
opóźniający
)
(
)
(
0
T
t
kx
t
y
−
=
0
G(s)
sT
ke
−
=
u(t)
y(t)
0
t
h(t)
0
T
k
)
(
1
)
(
0
T
t
k
t
h
−
⋅
=
0
t
g
(t)
0
T
)
(
)
(
0
T
t
k
t
g
−
⋅
=
δ
4
Automatyka i sterowanie – typowe człony automatyki
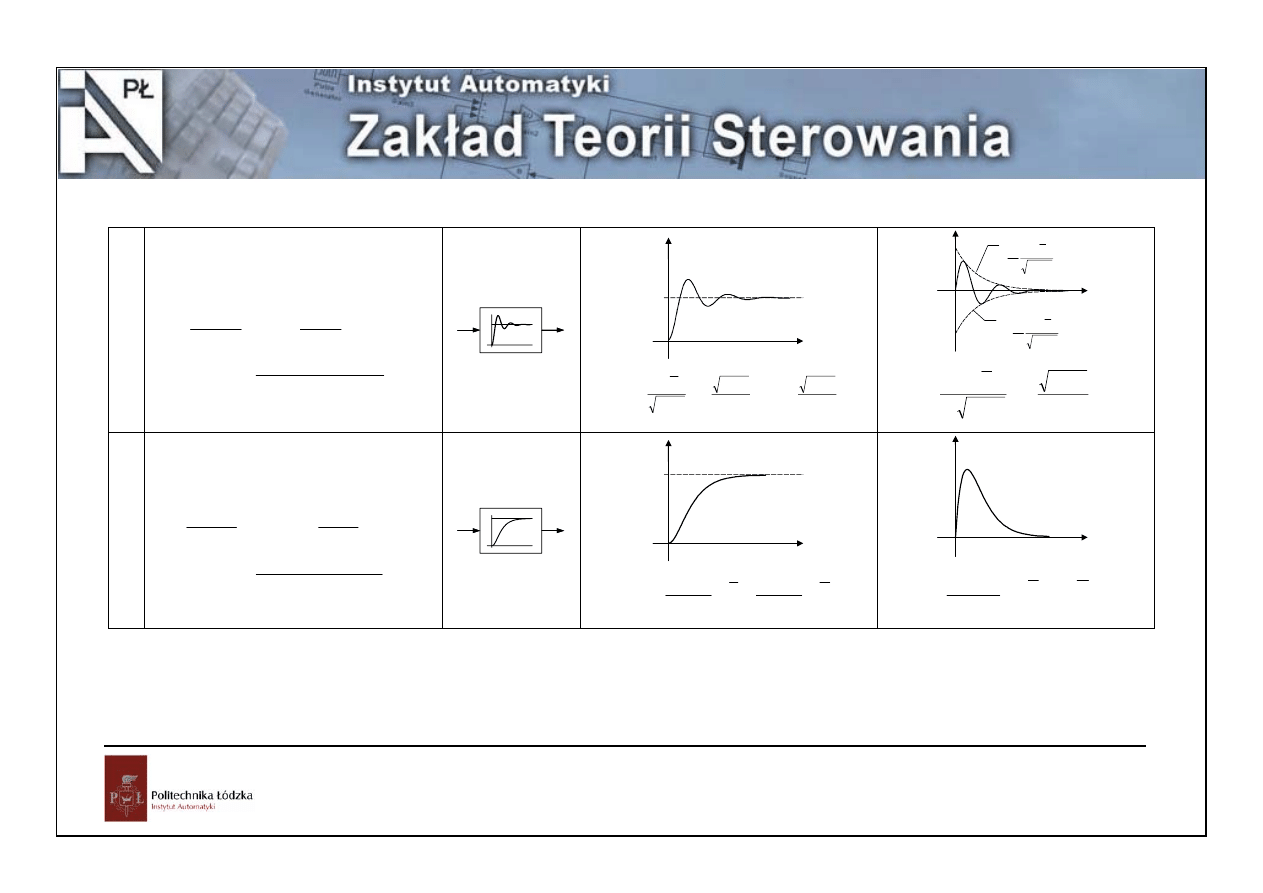
9.
oscylacyjny
1
0
<
<
ξ
k
)
(
)
(
2
)
(
0
2
2
2
0
=
+
+
t
y
dt
t
dy
T
dt
t
y
d
T
ξ
1
2
k
)
(
0
2
2
0
+
+
=
s
T
s
T
s
G
ξ
u(t)
y(t)
0
t
h
(t)
k
)
(
1
1
1
sin
1
1
)
(
2
0
2
2
0
t
arctg
t
T
e
k
t
h
T
t
⋅
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
+
−
−
−
=
−
ξ
ξ
ξ
ξ
ξ
0
t
g
(t)
2
0
1
0
ξ
ξ
−
−
T
t
e
T
k
2
0
1
0
ξ
ξ
−
−
−
T
t
e
T
k
)
(
1
1
sin
1
)
(
0
2
2
0
0
t
t
T
T
ke
t
g
T
t
⋅
⎥
⎥
⎥
⎦
⎤
⎢
⎢
⎢
⎣
⎡
⎟
⎟
⎠
⎞
⎜
⎜
⎝
⎛
−
−
=
−
ξ
ξ
ξ
10.
inercyjny drugiego rzędu
k
)
(
)
(
)
(
)
(
2
1
2
2
2
1
=
+
+
+
t
y
dt
t
dy
T
T
dt
t
y
d
T
T
)
1
(
)
1
(
G(s)
2
1
+
+
=
s
T
s
T
k
u(t)
y(t)
0
t
h
(t)
k
)
(
1
1
)
(
2
1
2
1
2
2
1
1
t
e
T
T
T
e
T
T
T
k
t
h
T
t
T
t
⋅
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
−
+
−
−
=
−
−
0
t
g
(t)
)
(
1
)
(
2
1
2
1
t
e
e
T
T
k
t
g
T
t
T
t
⋅
⎥
⎥
⎦
⎤
⎢
⎢
⎣
⎡
−
−
=
−
−
5
Automatyka i sterowanie – typowe człony automatyki
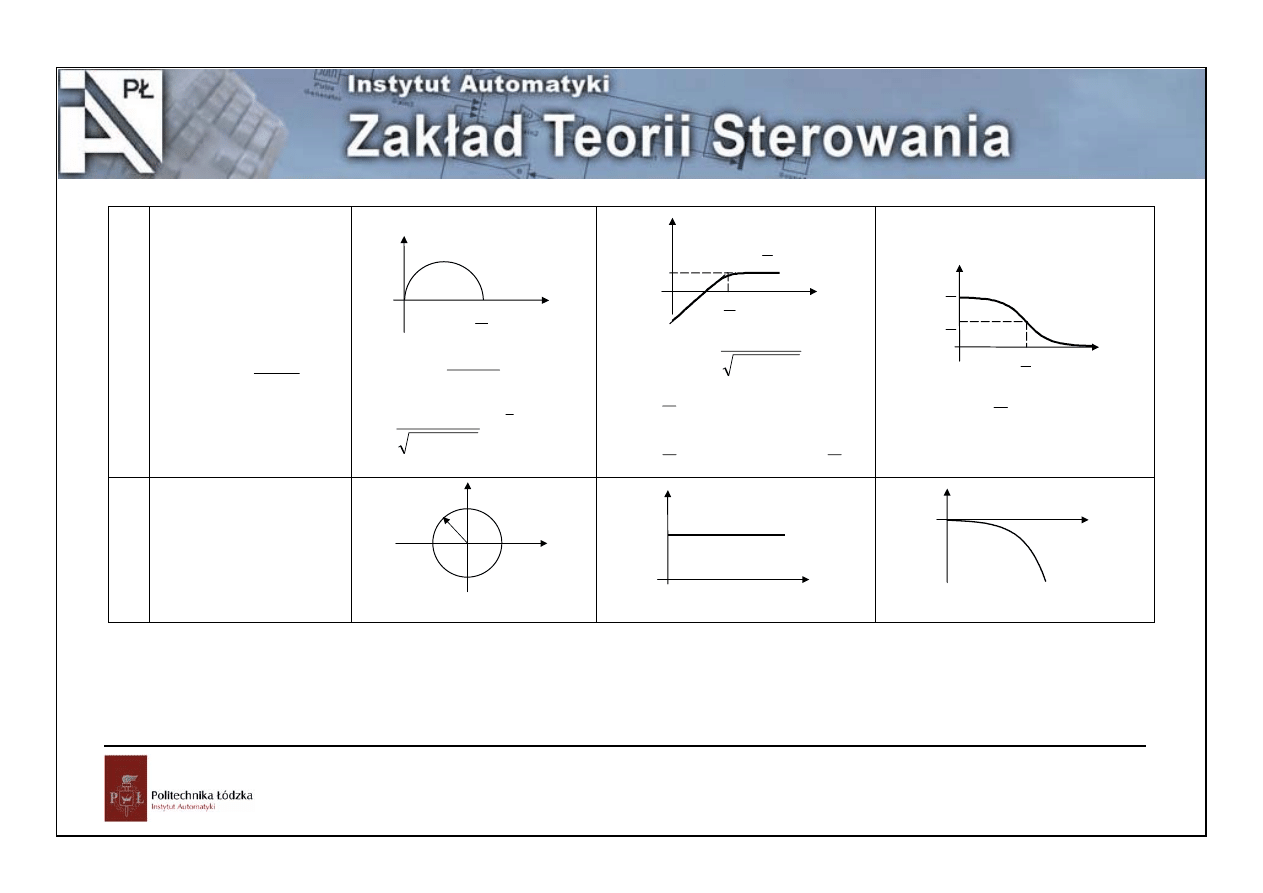
Typowe człony układów automatycznej regulacji i ich charakterystyki częstotliwościowe
6
Automatyka i sterowanie – typowe człony automatyki
Logarytmiczna charakterystyka częstotliwościowa
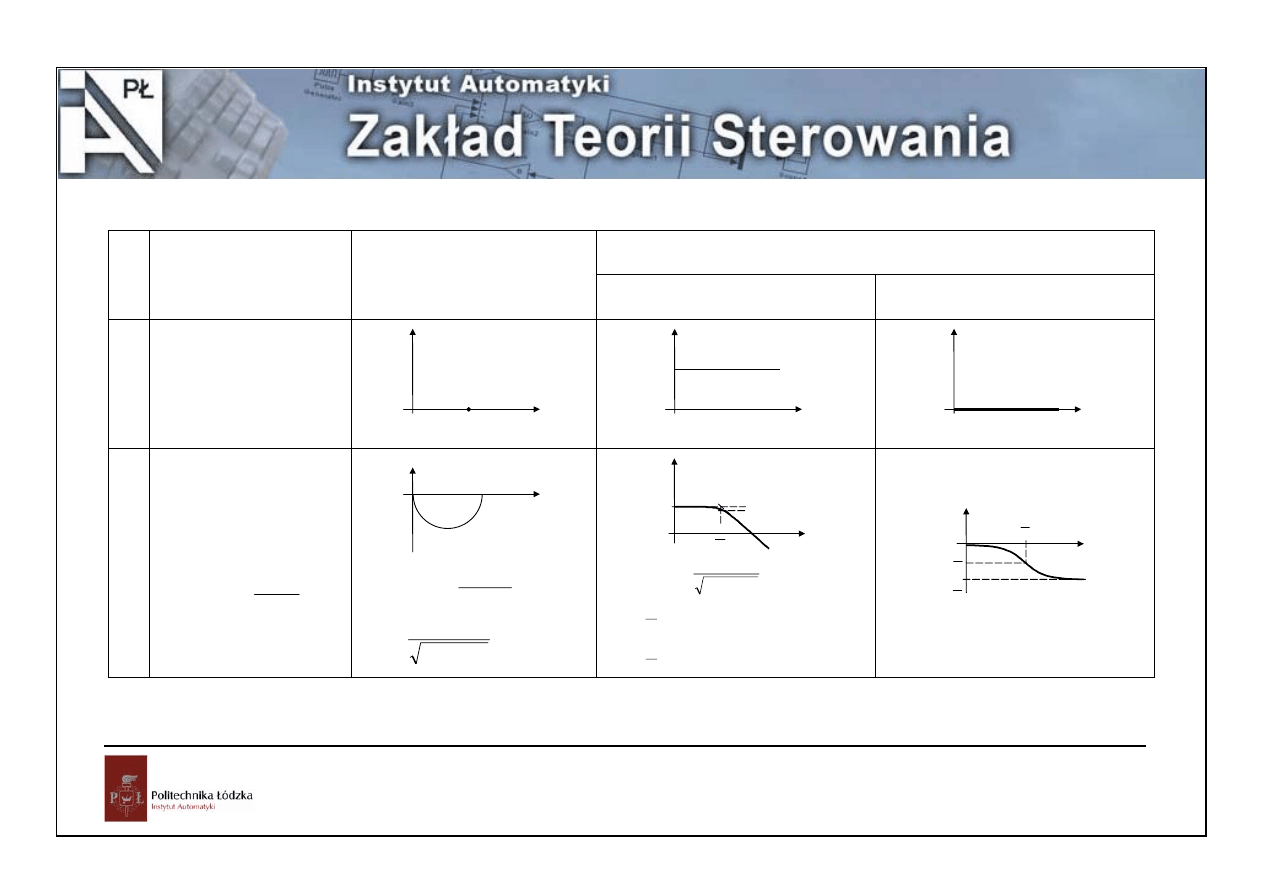
Lp.
Nazwa członu
i transmitancja
operatorowa G(s)
Transmitancja widmowa
G(jω), charakterystyka
amplitudowo - fazowa
amplitudowa L(ω)
fazowa φ(ω)
1.
proporcjonalny
(bezinercyjny)
k
G(s)
=
0
Q(ω)
P(ω)
k
k
j
G
=
)
(
ω
L(ω)
ω
k
log
20
k
L
log
20
)
(
=
ω
0
φ(ω)
ω
0
)
(
=
ω
ϕ
2.
inercyjny pierwszego
rzędu
1
k
G(s)
+
=
Ts
0
P(ω)
Q(ω)
k
0
=
ω
∞
→
ω
T
jarctg
e
T
k
Tj
k
j
G
ω
ω
ω
ω
−
+
=
=
+
=
1
1
)
(
2
2
L(ω)
ω
T
1
k
log
20
dek
dB /
20
−
dB
3
ω
ω
ω
ω
ω
ω
ω
T
k
L
T
k
L
T
T
k
L
log
20
log
20
)
(
1
log
20
)
(
1
1
log
20
)
(
2
2
−
≅
>>
≅
<<
+
=
φ(ω)
ω
2
π
−
4
π
−
T
1
T
arctg
ω
ω
ϕ
−
=
)
(
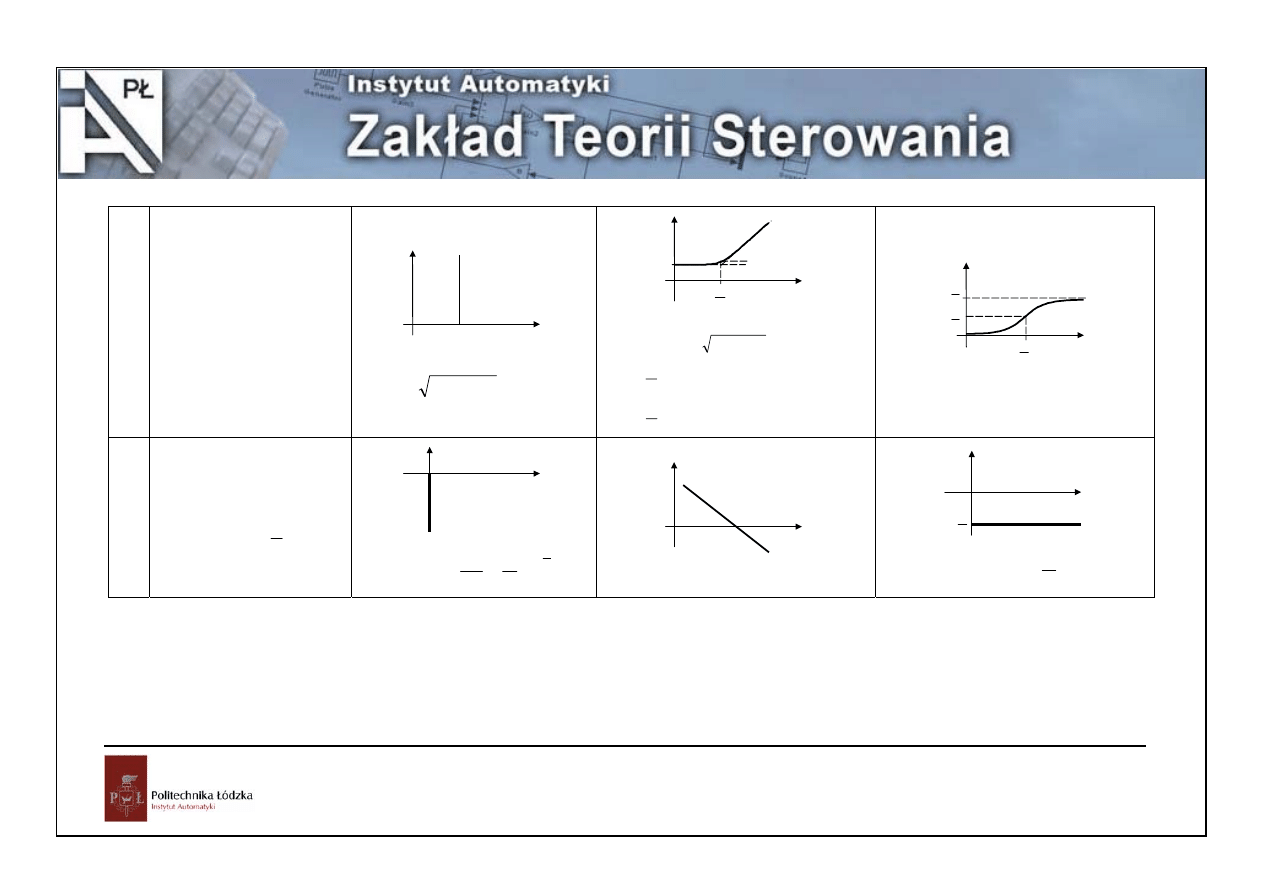
3.
regulator PD
proporcjonalno -
różniczkujący
)
1
(
k
G(s)
+
= Ts
0
P(ω)
Q(ω)
k
0
=
ω
∞
→
ω
[
]
T
jarctg
e
T
k
Tj
k
j
G
ω
ω
ω
ω
1
)
1
(
)
(
2
2
+
=
=
+
=
L(ω)
ω
T
1
k
log
20
dek
dB /
20
dB
3
ω
ω
ω
ω
ω
ω
ω
T
k
L
T
k
L
T
T
k
L
log
20
log
20
)
(
1
log
20
)
(
1
1
log
20
)
(
2
2
+
≅
>>
≅
<<
+
=
φ(ω)
ω
2
π
4
π
T
1
T
arctg
ω
ω
ϕ
=
)
(
4.
całkujący idealny
s
k
G(s)
=
0
P(ω)
Q(ω)
0
=
ω
∞
→
ω
2
)
(
π
ω
ω
ω
j
e
k
j
k
j
G
−
=
=
L
(ω)
dek
dB /
20
−
k
ω
ω
ω
log
20
log
20
)
(
−
=
k
L
2
π
−
φ
(ω)
ω
2
)
(
π
ω
ϕ
−
=
7
Automatyka i sterowanie – typowe człony automatyki
8
Automatyka i sterowanie – typowe człony automatyki
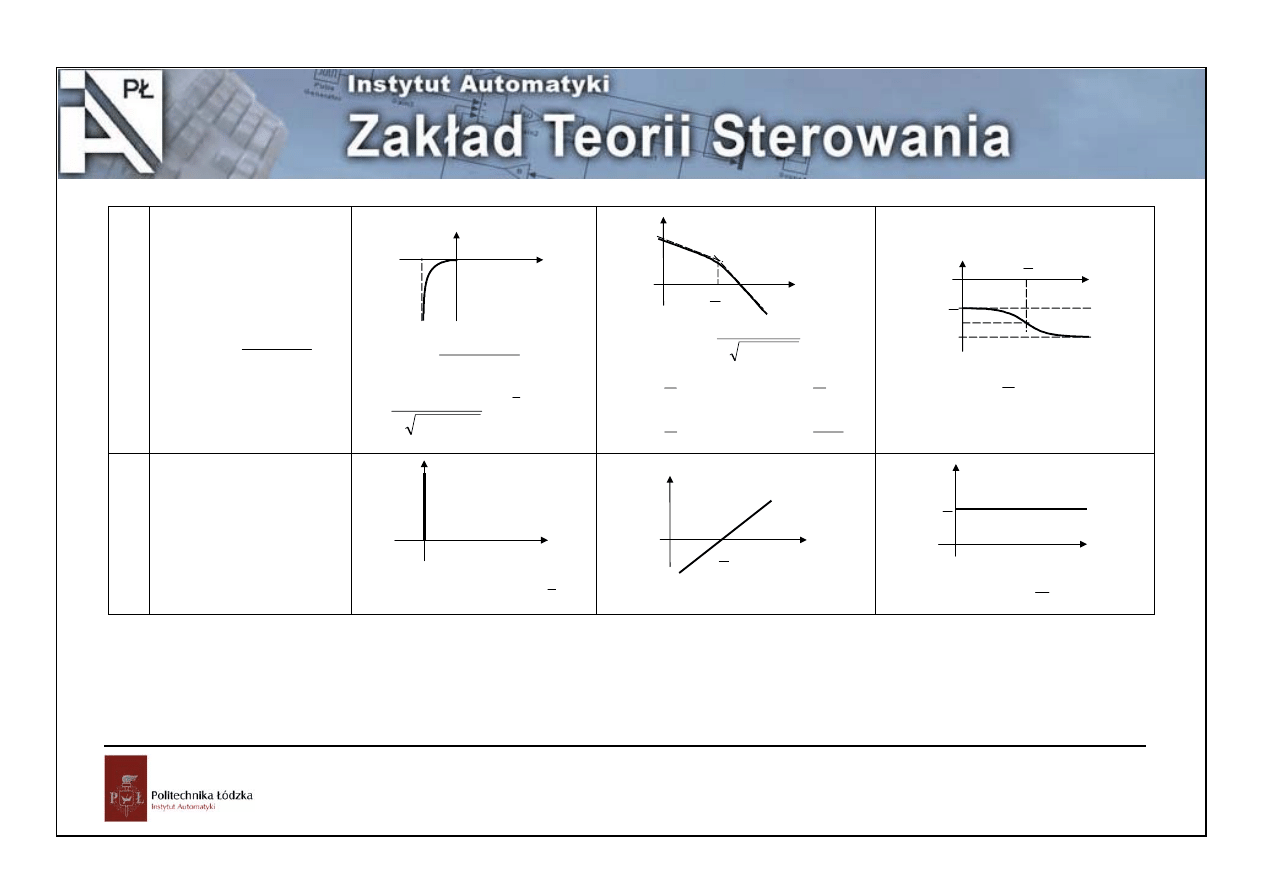
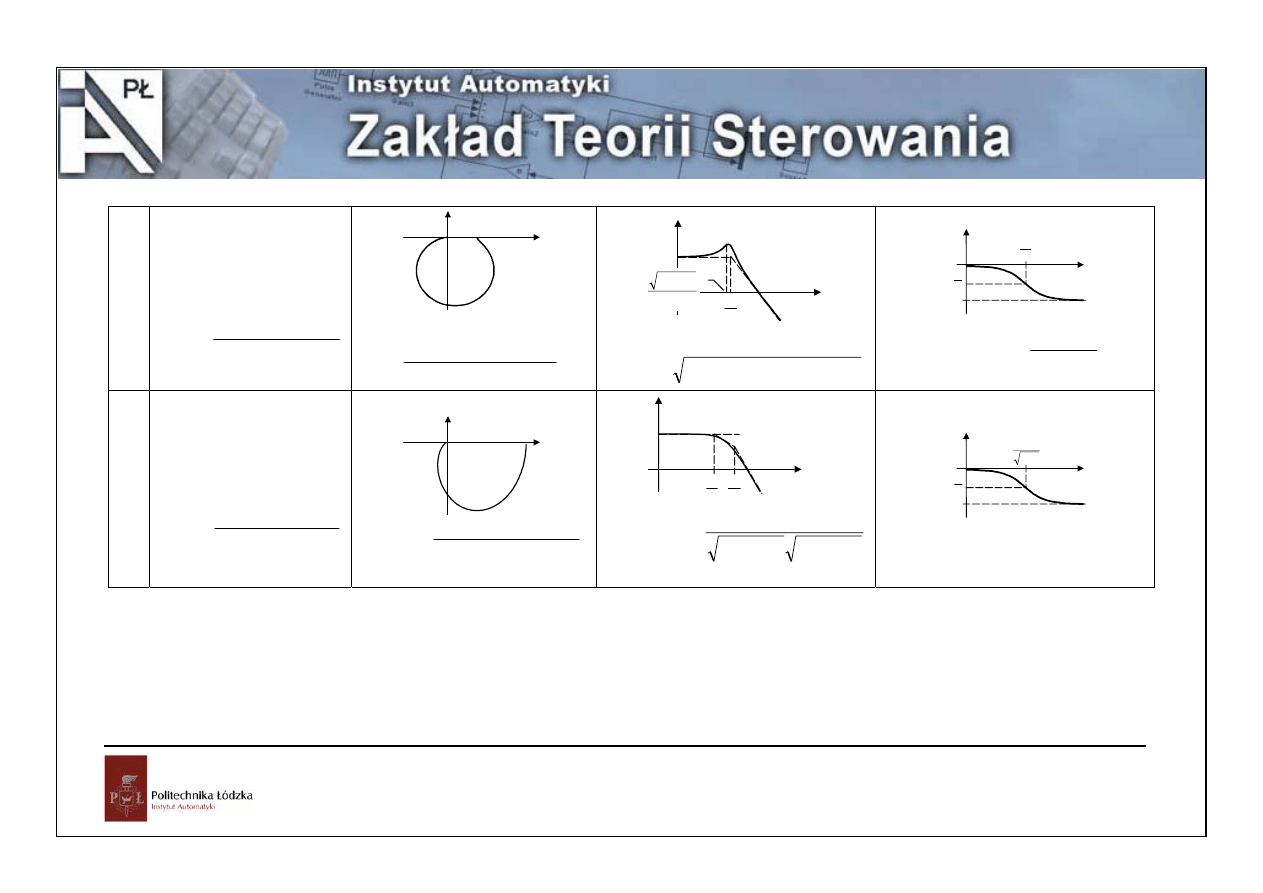
5.
całkujący rzeczywisty
)
1
(
k
G(s)
+
=
Ts
s
0
P(ω)
Q(ω)
0
=
ω
∞
→
ω
-kT
⎟
⎠
⎞
⎜
⎝
⎛ +
−
+
=
=
+
=
T
arctg
j
e
T
k
Tj
j
k
j
G
ω
π
ω
ω
ω
ω
ω
2
2
2
1
)
1
(
)
(
L(ω)
ω
T
1
dek
dB /
20
−
dek
dB /
40
−
2
2
2
log
20
)
(
1
log
20
)
(
1
1
log
20
)
(
ω
ω
ω
ω
ω
ω
ω
ω
ω
T
k
L
T
k
L
T
T
k
L
≅
>>
≅
<<
+
=
φ(ω)
ω
2
π
−
T
1
π
−
T
arctg
ω
−
π
−
=
ω
ϕ
2
)
(
6.
różniczkujący idealny
ks
=
G(s)
Q(ω)
0
=
ω
∞
→
ω
0
P(ω)
2
)
(
π
ω
ω
ω
j
e
k
kj
j
G
+
=
=
L(ω)
dek
dB /
20
k
1
ω
ω
ω
log
20
log
20
)
(
+
=
k
L
2
π
φ(ω)
ω
2
)
(
π
ω
ϕ
=
7.
różniczkujący
rzeczywisty
1
G(s)
+
=
Ts
ks
0
P(ω)
Q(ω)
T
k
0
=
ω
∞
→
ω
⎟
⎠
⎞
⎜
⎝
⎛ −
+
=
=
+
=
T
arctg
j
e
T
k
Tj
kj
j
G
ω
π
ω
ω
ω
ω
ω
2
2
2
1
1
)
(
L(ω)
ω
T
1
T
k
log
20
dek
dB /
20
T
k
L
T
k
L
T
T
k
L
log
20
)
(
1
log
20
)
(
1
1
log
20
)
(
2
2
≅
>>
≅
<<
+
=
ω
ω
ω
ω
ω
ω
ω
ω
φ(ω)
ω
2
π
4
π
T
1
T
arctg
ω
π
ω
ϕ
−
=
2
)
(
8.
opóźniający
0
G(s)
sT
ke
−
=
k
P(ω)
Q(ω)
∞
→
ω
0
=
ω
0
0
)
(
T
j
ke
j
G
ω
ω
−
=
L(ω)
ω
k
log
20
k
L
log
20
)
(
=
ω
0
φ(ω)
ω
0
)
(
T
ω
ω
ϕ
−
=
9
Automatyka i sterowanie – typowe człony automatyki
9.
oscylacyjny
1
0
<
<
ξ
1
2
k
)
(
0
2
2
0
+
+
=
s
T
s
T
s
G
ξ
0
P
(ω)
Q
(ω)
1
2
)
(
0
2
2
0
+
+
−
=
=
ω
ξ
ω
ω
j
T
T
k
j
G
L(ω)
ω
0
T
1
dek
dB /
40
−
0
2
2
1
T
ξ
−
k
log
20
2
2
0
2
2
2
2
0
4
)
1
(
log
20
log
20
)
(
ω
ξ
ω
ω
T
T
k
L
+
−
−
+
=
φ
(ω)
ω
π
−
2
π
−
0
T
1
2
2
0
0
1
2
)
(
ω
ω
ξ
ω
ϕ
T
T
arctg
−
−
=
10.
inercyjny drugiego
rzędu
)
1
(
)
1
(
G(s)
2
1
+
+
=
s
T
s
T
k
0
P
(ω)
Q
(ω)
)
1
(
)
1
(
)
G(
2
1
+
+
=
ω
ω
ω
j
T
j
T
k
j
L(ω)
ω
2
T
1
dek
dB /
20
−
k
log
20
1
T
1
dek
dB /
40
−
1
1
log
20
)
(
2
2
2
2
2
1
+
+
=
ω
ω
ω
T
T
k
L
φ
(ω)
ω
π
−
2
π
−
2
1
T
T
1
2
1
)
(
T
arctg
T
arctg
ω
ω
ω
ϕ
−
−
=
10
Automatyka i sterowanie – typowe człony automatyki
Wyszukiwarka
Podobne podstrony:
ais 03 id 53431 Nieznany (2)
ais 01 id 53429 Nieznany (2)
ais 04 id 53433 Nieznany (2)
ais d05 id 53449 Nieznany (2)
ais d03 id 53445 Nieznany (2)
ais 07 id 53437 Nieznany (2)
ais 05 id 53435 Nieznany (2)
ais d04 id 53447 Nieznany (2)
ais d02 id 53443 Nieznany (2)
ais d00 id 53439 Nieznany (2)
ais 03 id 53431 Nieznany (2)
AIS id 53428 Nieznany
AiR ais cw 6 MRJ3A id 53377 Nieznany (2)
Abolicja podatkowa id 50334 Nieznany (2)
4 LIDER MENEDZER id 37733 Nieznany (2)
katechezy MB id 233498 Nieznany
metro sciaga id 296943 Nieznany
perf id 354744 Nieznany
interbase id 92028 Nieznany
więcej podobnych podstron