POLITECHNIKA RADOMSKA im. KAZIMIERZA
PUŁASKIEGO
Wydział Mechaniczny, Instytut Eksploatacji Pojazdów l Maszyn
LABORATORIUM
NAPĘDÓW l STEROWANIA HYDRAULICZNEGO l PNEUMATYCZNEGO
Temat: Sterowanie sekwencyjne układów hydraulicznych
CEL
Celem ćwiczenia jest zapoznanie się z budową i zasadą działania podstawowych
hydraulicznych elementów sterujących oraz możliwościami ich praktycznego wykorzystania w
sterowaniu sekwencyjnym układów hydraulicznych.
WPROWADZENIE
Sterowanie napędów hydrostatycznych sprowadza się do zmiany jego parametrów
wyjściowych. Parametrami tymi są: prędkość, siła, moment i kierunek ruchu. W zależności od
rodzaju elementu roboczego napędu (silnik obrotowy lub liniowy) parametrami tymi są: prędkość
obrotowa n
2
lub liniowa v, siła F lub moment M, moc N=Mn lub N=Fv.
Parametry te są funkcjami następujących czynników:
vs
s
q
Q
n
η
⋅
=
[obr/min] (5.1)
vsk
S
Q
V
η
⋅
=
[m/s] (5.2)
ms
hs
s
p
q
M
η
η
π
⋅
⋅
⋅
=
2
[Nm] (5.3)
msk
hsk
p
S
F
η
η
⋅
⋅
⋅
=
[N] (5.4)
gdzie:
Q - natężenie przepływu cieczy doprowadzonej do odbiornika
q
s
- chłonność jednostkowa silnika
S - powierzchnia czynna tłoka siłownika
p- ciśnienie cieczy na wejściu do silnika ( pominięto ciśnienie na wyjściu z silnika)
η
hs
, η
ms
, η
hsk
, η
msk
, - odpowiednie sprawności hydrauliczne i mechaniczne silnika.
Z tych zależności wynikają ogólne zasady sterowania parametrów wyjściowych napędów
hydrostatycznych, które możemy wyrazić następującymi funkcjami:
1 . Prędkość wyjściowa n = f (Q, V
gs
) lub v =f(Q, S)
2. Moment M = f(p, V
gs
) lub siła F = f(p, S)
Z zależności tych wynika, iż sterowanie prędkości wyjściowej silnika może być realizowane
przez zmianę wydajności pompy, zmianę oporów przepływu cieczy w instalacji lub zmianę
parametrów silnika (zmiana q
s
lub S).
Sterowanie momentu lub siły może być realizowane przez zmianę ciśnienia na wyjściu z pompy,
zmianę ciśnienia w instalacji lub zmianę parametrów silnika lub siłownika (zmiana q
s
lub S).
W napędach hydrostatycznych pojazdów i maszyn roboczych najczęściej stosuje się
sterowanie prędkości a siły i momenty wynikają z obciążenia maszyny. W zależności od tego
obciążenia ustala się wartość ciśnienia cieczy na wejściu do silnika. W napędach
hydrostatycznych pojazdów i maszyn roboczych nie stosuje się na ogół regulacji tego ciśnienia
ograniczając jedynie jego max wartość za pomocą odpowiednich zaworów bezpieczeństwa.
Ogranicza to wartość max momentów lub sił zabezpieczając cały układ przed przeciążeniem.
W celu realizacji sterowania ww. parametrów hydrauliczny układ napędowy musi być
wyposażony w odpowiedni układ sterujący usytuowany miedzy pompą a elementem
wykonawczym (silnikiem lub siłownikiem). Zadaniem układu sterującego jest doprowadzenie
strumienia cieczy roboczej do odbiornika zgodnie z wymaganym do realizacji danego ruchu
kierunkiem oraz natężeniem przepływu i ciśnieniem.
Układ sterujący składa się z elementów wytwarzających sygnały, do których należą
dźwignie, przyciski, wyłączniki, czujniki członów sterujących (od prostych przekaźników do
mikroprocesorów) oraz człony wykonawcze, czyli zawory służące do sterowania wartością i
kierunkiem przepływu cieczy roboczej.
Zawory stanowią najbardziej rozbudowaną grupę elementów hydrostatycznych układów
napędowych. Wynika to z bardzo zróżnicowanych funkcji, jakie mają do spełnienia w układzie.
Najogólniej mówiąc, zawory powinny umożliwiać uruchomienie, zatrzymanie i zmianę kierunku
ruchu silnika. Od wyboru tych elementów zależy funkcjonalność układu. Wybór typu i wielkości
zaworu jest zdeterminowany wymaganiami napędzanej maszyny lub urządzenia, a także
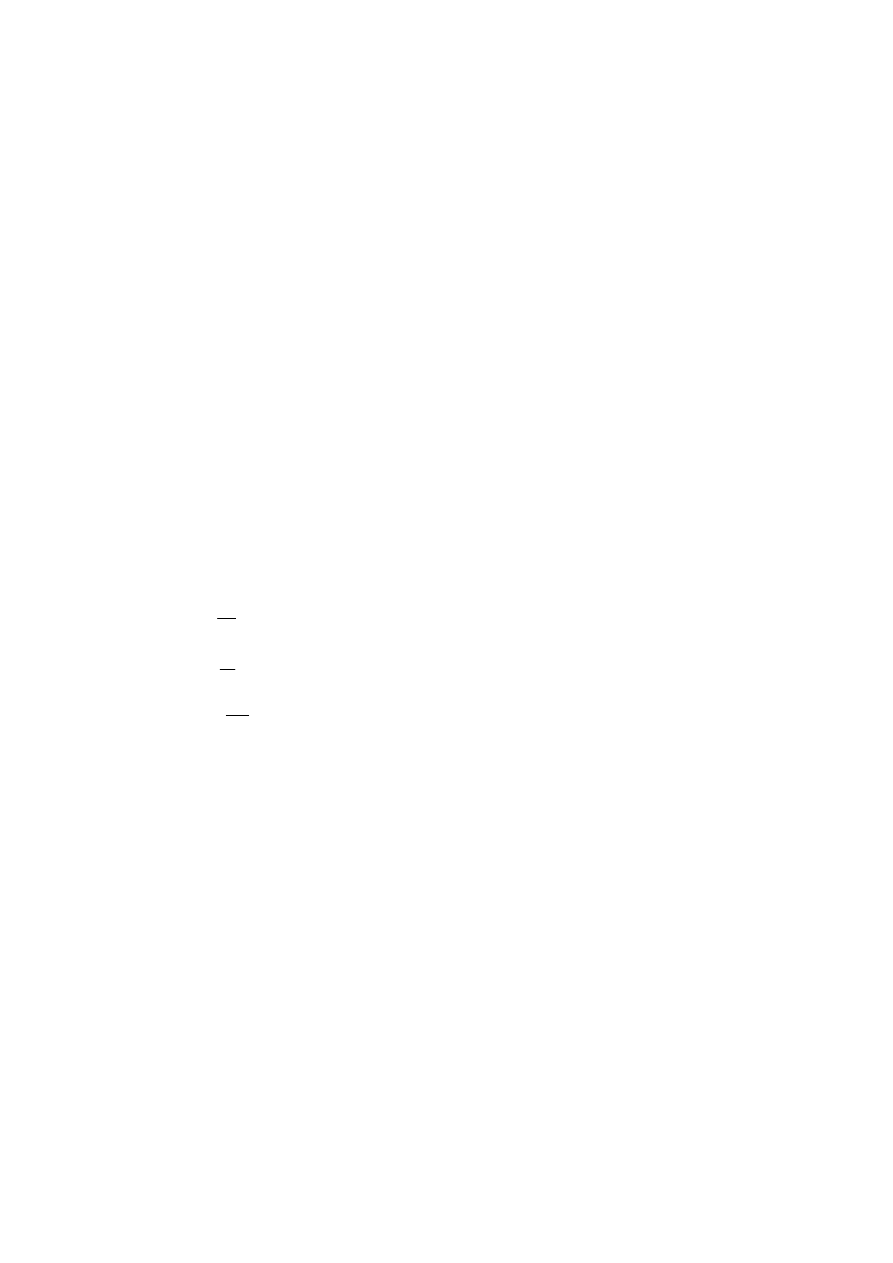
wartościami natężeń przepływu i ciśnienia czynnika roboczego. Podział zaworów, oparty na
normie PN-79/M-73022 przedstawiono na rys. 1.
Rys.5.1. Ogólna systematyka zaworów
Zawory dzielimy na zawory natężeniowe, ciśnieniowe, kierunkowe i specjalne.
Zawory kierunkowe służą do zmiany kierunku przepływu czynnika roboczego, co
wywołuje zmianę kierunku ruchu siłownika lub obrotu silnika.
Zawory natężeniowe służą do regulacji natężenia przepływu czynnika roboczego
dostarczanego do odbiornika w celu sterowania prędkością silnika lub ustalenia jej na zadanym
poziomie. Pierwszy cel można osiągnąć za pomocą zaworów dławiących, umożliwiających
zmianę prędkości roboczej silnika zasilanego przez pompę o stałej wydajności. W drugim

przypadku stosowane będą regulatory przepływu, pozwalające stabilizować prędkość silnika,
niezależnie od zakłóceń w postaci zmian obciążenia silnika lub wydajności pompy, wywołanych
np. zmianą prędkości obrotowej silnika napędowego.
Zawory dławiące są najprostszymi zaworami natężeniowymi. Służą do regulacji prędkości
ruchu hydraulicznych urządzeń roboczych przez zmianę natężenia dopływu cieczy poprzez
zmianę przekroju poprzecznego przepływu.
Istnieją dwa sposoby zabudowy zaworów dławiących:
- w odgałęzieniu ciśnieniowym (zasilającym) - regulacja na dopływie
- w odgałęzieniu odpływowym (przelewowym) - regulacja na odpływie
Najczęściej zawory nastawcze wbudowywane są w odgałęzieniach odpływowych co
zapewnia odpowiednią sztywność układu i tłumienie drgań.
Synchronizatory należą do grupy zaworów sterujących natężeniem przepływu a ich
zadaniem jest podział strumienia zasilającego w określonym stosunku. Jeżeli stosunek podziału
natężeń strumieni będzie równy 1, silniki będą mogły pracować z jednakową prędkością
niezależnie od ich obciążeń zewnętrznych.
Regulatory przepływu służą do utrzymania stałego, nastawionego natężenia przepływu
czynnika roboczego, niezależnie od zmian ciśnienia w układzie wynikającego ze zmian
obciążenia mechanizmu wykonawczego.
Rozróżniamy regulatory dwu i trzydrogowe. Są to konstrukcje powstałe z połączenia
zaworu dławiącego i zaworu różnicowego. Na natężenie strumienia regulowanego w
decydującym stopniu wpływa zawór dławiący, na którym utrzymana jest stała wartość spadku
ciśnienia za pomocą zaworu różnicowego.
Zawory ciśnieniowe możemy podzielić na zawory ograniczające ciśnienie i regulatory
ciśnienia.
Zawory ograniczające ciśnienie reagują na zmiany ciśnienia przed zaworem. Jeżeli
ciśnienie, przed zaworem podwyższy się tak, że iloczyn ciśnienia oraz czynnej powierzchni
przekroju zaworu stanie się większy niż nacisk sprężyny wynikający z jej wstępnego napięcia,
element zamykający zaworu zostaje odepchnięty od gniazda, otwierając wolny przelot, którym
ciecz robocza przepływa do zbiornika.
Zawór bezpieczeństwa, zabezpiecza układ przed wzrostem ciśnienia ponad dopuszczalną
wartość, głównie w przypadku przeciążenia lub awarii. W czasie normalnej pracy układu zawór
ten jest zamknięty. Przy wzroście ciśnienia powyżej wartości ustalonej na zaworze łączy linię
ciśnieniową ze zbiornikiem. Zawór bezpieczeństwa powinien otworzyć się natychmiast w
przypadku nagłego wzrostu ciśnienia, ponieważ tylko wówczas skutecznie zapobiega
chwilowemu choćby podwyższeniu się ciśnienia w układzie powyżej wartości dopuszczalnej.
Zawór przelewowy służy do utrzymania stałej wartość ciśnienia przed zaworem poprzez
odprowadzenie nadmiaru cieczy z odgałęzienia roboczego. Przeważnie zawór przelewowy
spełnia jednocześnie zadania zaworu bezpieczeństwa.
Do zaworów regulujących ciśnienie zaliczamy zawory redukcyjne, różnicowe i
proporcjonalne
Zawór redukcyjny służy do utrzymywania określonego obniżonego ciśnienia roboczego w
jednym z odgałęzień lub w części układu hydraulicznego.
Zawór różnicowy utrzymuje stałą różnicę ciśnień przed i za zaworem.
Zawór ciśnieniowy proporcjonalny utrzymuje stały stosunek ciśnień przed i za zaworem.
Zawory odcinające służą do zamykania i otwierania przepływu cieczy do poszczególnych
odgałęzień lub zespołów układu hydraulicznego. W zależności od przeznaczenia oraz sposobu, w
jaki się tego dokonuje, zawory te można podzielić na zawory odcinające proste i zawory zwrotne.
Zawór zwrotny zapewnia swobodny przepływ czynnika roboczego w jednym kierunku i
uniemożliwia jej przepływ w kierunku przeciwnym (zapobiega wstecznemu przepływowi,
cofaniu się cieczy). Zawory zwrotne powinny szybko zamykać się i otwierać. Sprężyna
obciążająca zawór zwrotny jest na ogół słaba, zapewnia jednak natychmiastowe zamknięcie się
zaworu z chwilą ustania przepływu cieczy. W sytuacjach, kiedy chcemy maksymalnie
zminimalizować opory przepływu stosowane są zawory zwrotne bez sprężyn dociskowych,
zamykające się dzięki opadaniu kulki lub płytki pod własnym ciężarem. Zawory te muszą być
montowane w pozycji zapewniającej docisk elementu zamykającego do gniazda siłą ciężkości.
Jeżeli wymaga się szczególnie szybkiego zamykania zaworu zwrotnego, to jego ruchomy
element roboczy powinien mieć możliwie małą bezwładność i wykonywać jak najkrótszy skok.
Wymagania te najlepiej spełnia zawór zwrotny płytkowy.
Kierunek przepływu cieczy przez zawór zwrotny jest zwykle oznaczony strzałką na
korpusie.
Zawory kierunkowe zwane rozdzielaczami służą do sterowania kierunkiem przepływu
czynnika roboczego w układzie. Usytuowane są pomiędzy elementami układu napędowego
(zbiornik, pompa) a silnikiem. Przesterowanie elementu sterującego rozdzielacza umożliwia
realizację różnych kombinacji połączeń między tymi elementami.
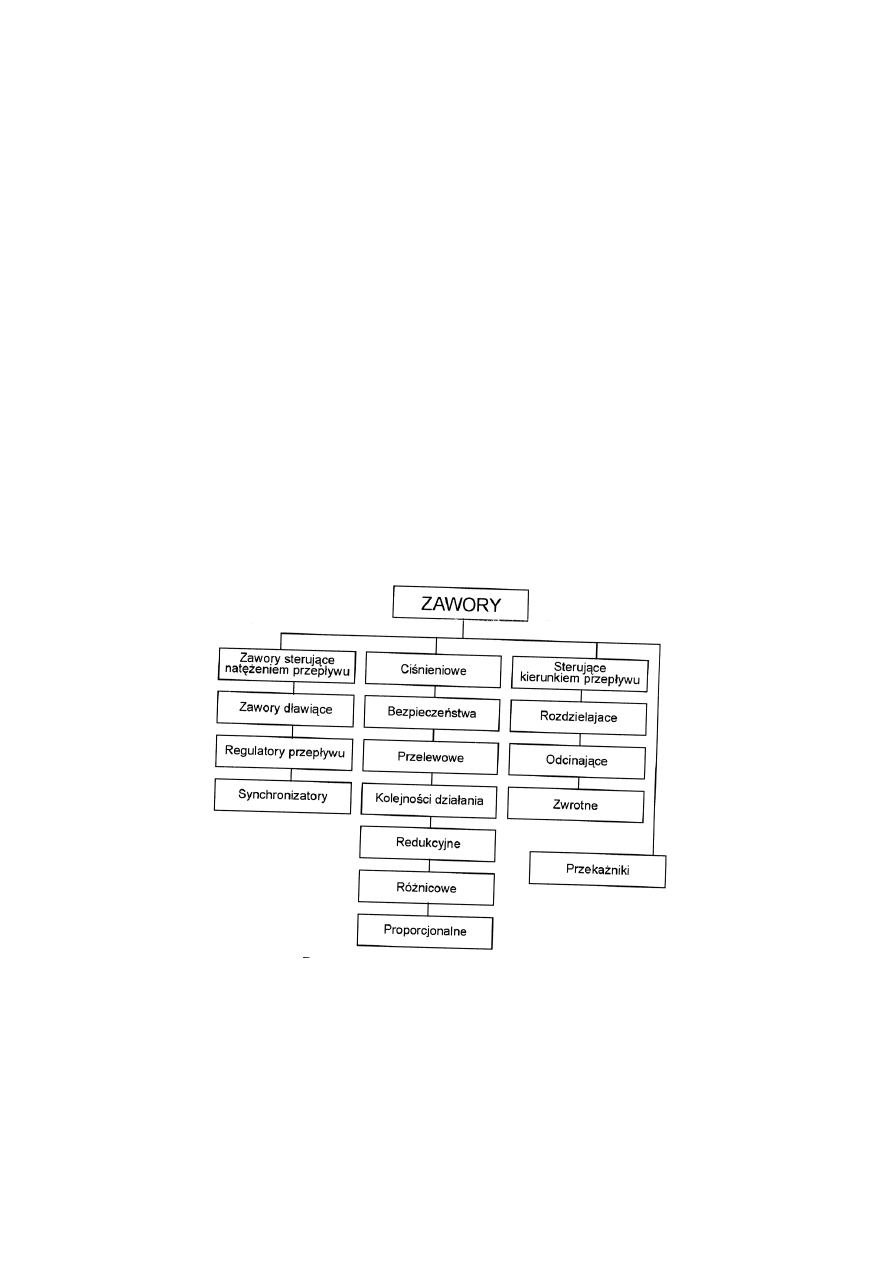
Rys.5. 2. Budowa i zasada działania rozdzielaczy: a) suwakowego, b) zaworowego, c)
obrotowego.
Ze względu na rodzaj elementu sterującego rozdzielacze można podzielić na suwakowe,
zaworowe i obrotowe rys. 5.2.
Głównym elementem rozdzielacza suwakowego (rys. 5.2a) jest cylindryczna para
suwakowa utworzona przez cylindryczną tuleję i współpracujący z nią szczelnie dopasowany
suwak tłoczkowy. W tulei są wykonane otwory, którymi jest doprowadzany lub odprowadzany
czynnik roboczy. Łączenia poszczególnych otworów dokonuje się przemieszczając suwak
osiowo względem nieruchomej tulei. W położeniu / dźwigni sterującej otwory P i A są
połączone. Przestawiając dźwignię w położenie //, uzyskuje się zamknięcie otworu P i połączenie
otworów A i Z.
W rozdzielaczu zaworowym (rys.5.2.b) rozrządu cieczy dokonuje się za pomocą zespołu
zaworów wzniosowych otwierających lub zamykających odpowiednie otwory przelotowe.
W rozdzielaczach obrotowych (rys. 5.2.c), łączenie poszczególnych dróg odbywa się przez
obrót trzpienia, szczelnie dopasowanego w obudowie.
Ze względu na ilość dróg dzielimy rozdzielacze na dwu i więcej drogowe. Ilość dróg to ilość
wyjść z wnętrza rozdzielacza na zewnątrz. Ilość dróg mówi nam o ilości przyłączy roboczych do
rozdzielacza. Dwa z nich to doprowadzenie i odprowadzenie czynnika roboczego, pozostałe to
przyłącza organów roboczych.
Ze względu na liczbę położeń rozdzielacze dzielą się na dwu i wielo położeniowe. Ilość
położeń mówi o ilości możliwych do realizacji ruchów organu roboczego (wysuw, powrót lub
zatrzymanie tłoczyska siłownika, lewe lub prawe obroty silnika hydrostatycznego)

Wyboru elementów sterujących najczęściej dokonujemy na podstawie analizy cyklogramu
pracy maszyny.
Przy wyborze rozdzielacza musimy uwzględnić średnicę nominalną przelotu, ilość dróg,
ilość niezbędnych położeń sterujących, rodzaj połączeń dróg w poszczególnych położeniach oraz
rodzaj sterowania. Należy uwzględnić również ilość elementów wykonawczych w celu wyboru
optymalnej ilości zaworów rozdzielających. W przypadku większej ilości elementów
wykonawczych
(siłowników
i
silników
obrotowych)
należy
stosować
rozdzielacze
wielosekcyjne.
W celu zrealizowania ruchu roboczego siłownika jednostronnego działania należy
doprowadzić do niego czynnik roboczy pod ciśnieniem, ruch powrotny natomiast wymuszany
jest działaniem sprężyn znajdujących się wewnątrz lub na zewnątrz siłownika czy też ciężarem
własnym tłoka, tłoczyska i związanych z nimi mas. Sterowanie takimi siłownikami umożliwiają
zależnie od rodzaju cyklu roboczego, rozdzielacze 3/2 (trójdrogowe, dwu położeń i owe), 3/3
(trójdrogowe, trójpołożeniowe) lub przy bardziej rozbudowanym sterowaniu rozdzielacze 4/3
(czterodrogowe, trójpołożeniowe). Przykładowe układy sterowania siłownikami jednostronnego
działania przedstawiono na rys. 5.3.
W celu zrealizowania ruchu postępowo-zwrotnego siłownika dwustronnego działania
(rys.5.4) należy doprowadzić czynnik roboczy pod ciśnieniem przemiennie do obu przestrzeni
roboczych cylindra. Sterowanie takimi siłownikami umożliwiają, zależnie od rodzaju cyklu
roboczego, rozdzielacze 4/2 (czterodrogowe, dwupołożeniowe) lub 4/3 (czterodrogowe,
trójpołożeniowe).
Sterowanie tymi rozdzielaczami może być realizowane elektrycznie, hydraulicznie lub
mechanicznie.
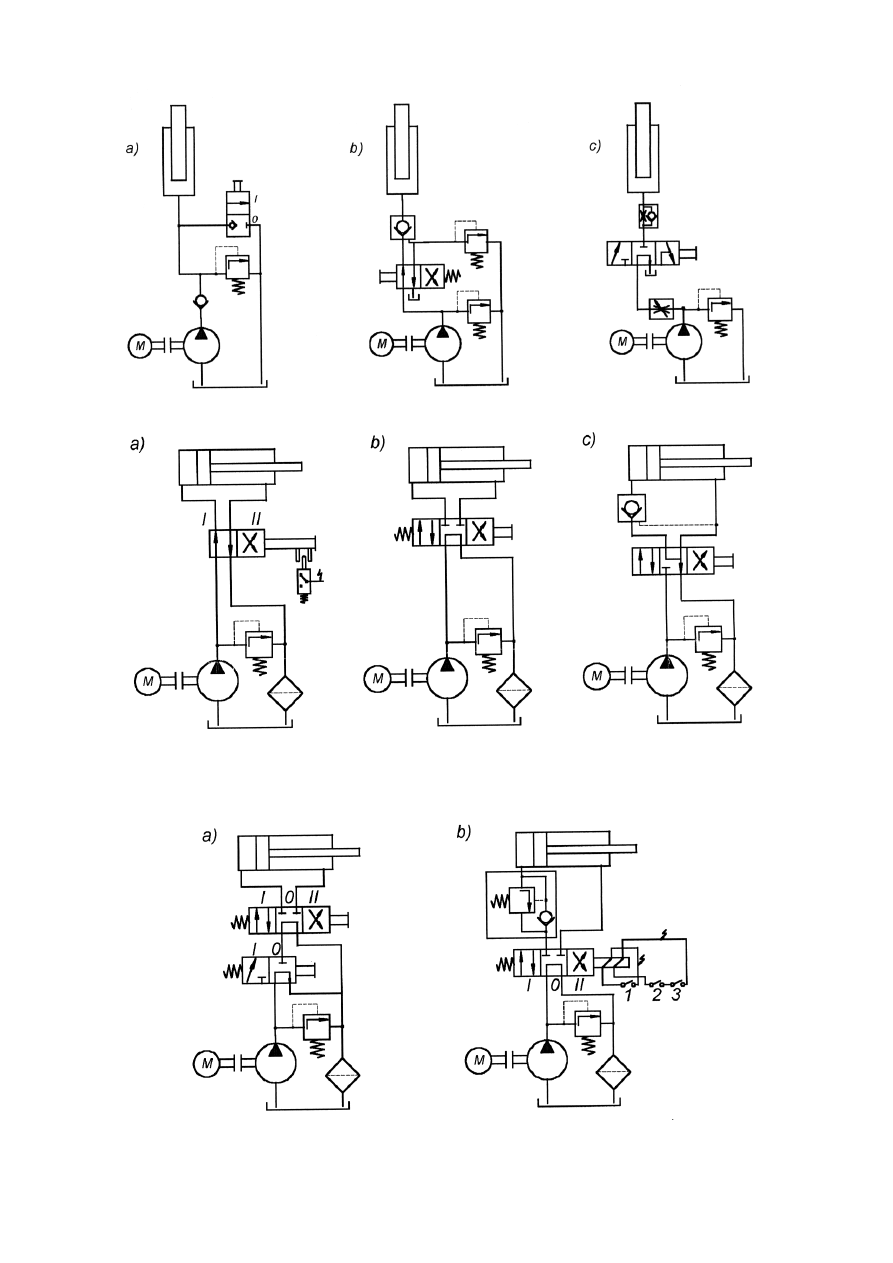
W wielu przypadkach ze względów bezpieczeństwa należy stosować sterowanie dwuręczne
rys 5.5.
W wielomechanizmowych układach napędowych maszyn, pracujących w cyklu
automatycznym, poszczególne czynności cyklu roboczego następują zawsze w ustalonej
kolejności. Sterowanie umożliwiające pracę maszyny w taki sposób nosi nazwę sterowania
sekwencyjnego. Sekwencyjne układy sterujące mają bardzo zróżnicowany stopień złożoności.
Obejmują zarówno proste dwuczynnościowe mechanizmy, jak też bardzo złożone układy
sterowania programowego.
W zależności od sposobu działania można wyróżnić:
- sterowanie bezpośrednie
- sterowanie pośrednie.
W sterowaniu bezpośrednim organ roboczy oddziałuje mechanicznie na elementy sterujące
za pomocą popychaczy lub zespołu dźwigni. Ponieważ włączanie i wyłączanie elementu
sterującego następuje w określonym położeniu roboczym mechanizmu lub siłownika, sterowanie
to nazywa się również sterowaniem położeniowym. Podczas sterowania bezpośredniego można
korzystać także z ciśnienia w układzie jako sygnału do uruchomienia elementu sterującego w
postaci zaworów ciśnieniowych różnych typów np. maksymalnych rys.5.6. Mówimy wtedy o
sterowaniu ciśnieniowym.
W sterowaniu pośrednim istnieje dodatkowy obwód sterujący (elektryczny, pneumatyczny lub
hydrauliczny) o małej mocy, oddziałujący na elementy sterujące układem roboczym.
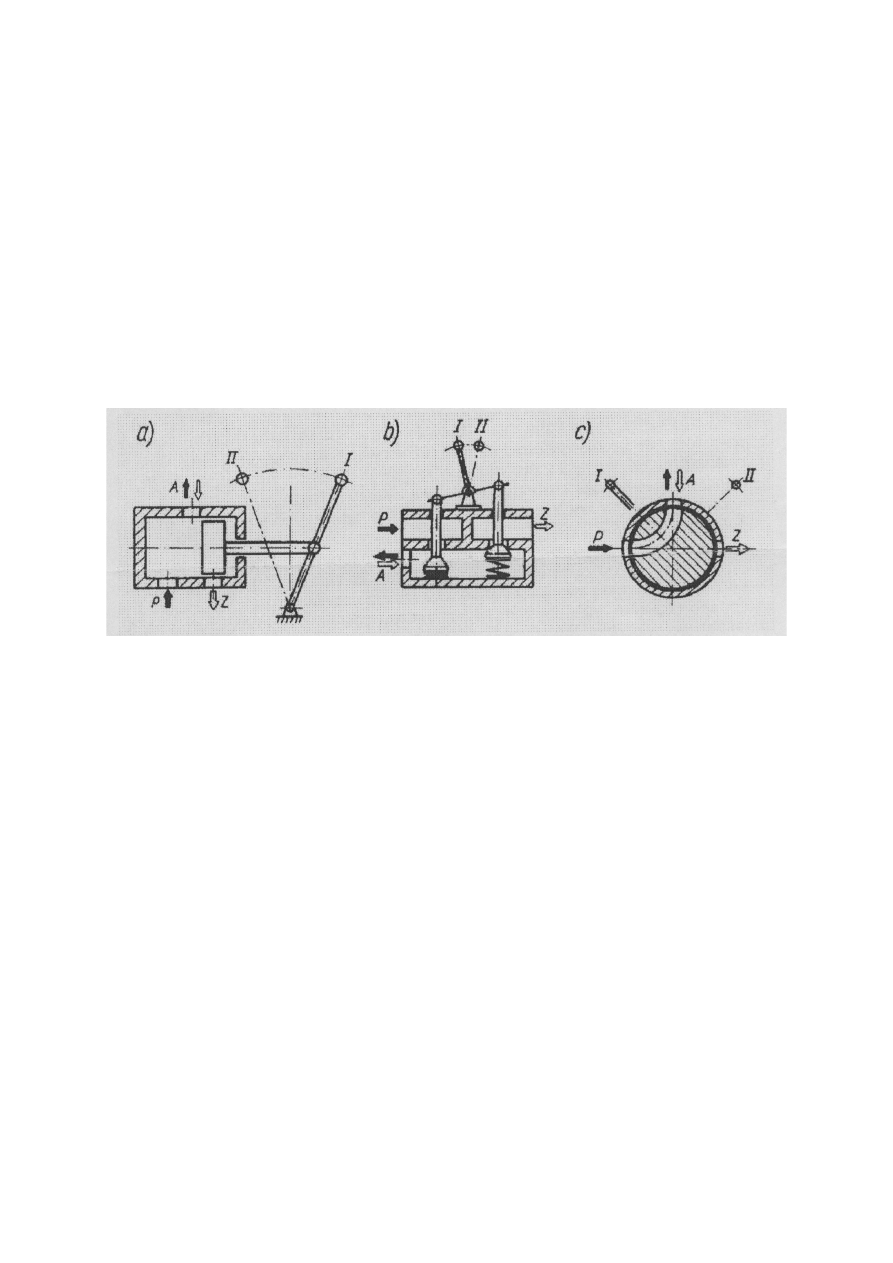
Rys.5. 3. Układy sterowania siłownikiem jednostronnego działania: a) siłownikiem napędzającym pompę i
rozdzielaczem 2/2, b) rozdzielaczem 4/2, c) rozdzielaczem 3/3
Rys.5. 4. Układy sterowania siłownikiem dwustronnego działania: a) rozdzielaczem 4/2 współpracującym z
wyłącznikiem silnika napędzającego pompę, b) rozdzielaczem 4/3 i odciążoną pompą, c) rozdzielaczem 4/3
i zaworem umożliwiającym unieruchomienie tłoka w dowolnym położeniu
Rys.5. 4. Sterowania dwuręczne: a) rozdzielaczami sterowanymi ręcznie, b) elektrycznie
Najczęściej w obwodach sterujących stosuje się układy elektryczne lub elektroniczne, które
zestawia się z typowych elementów stosowanych w automatyce przemysłowej. Sterowanie
pośrednie można podzielić na:
-
położeniowe
-
ciśnieniowe
-
czasowe
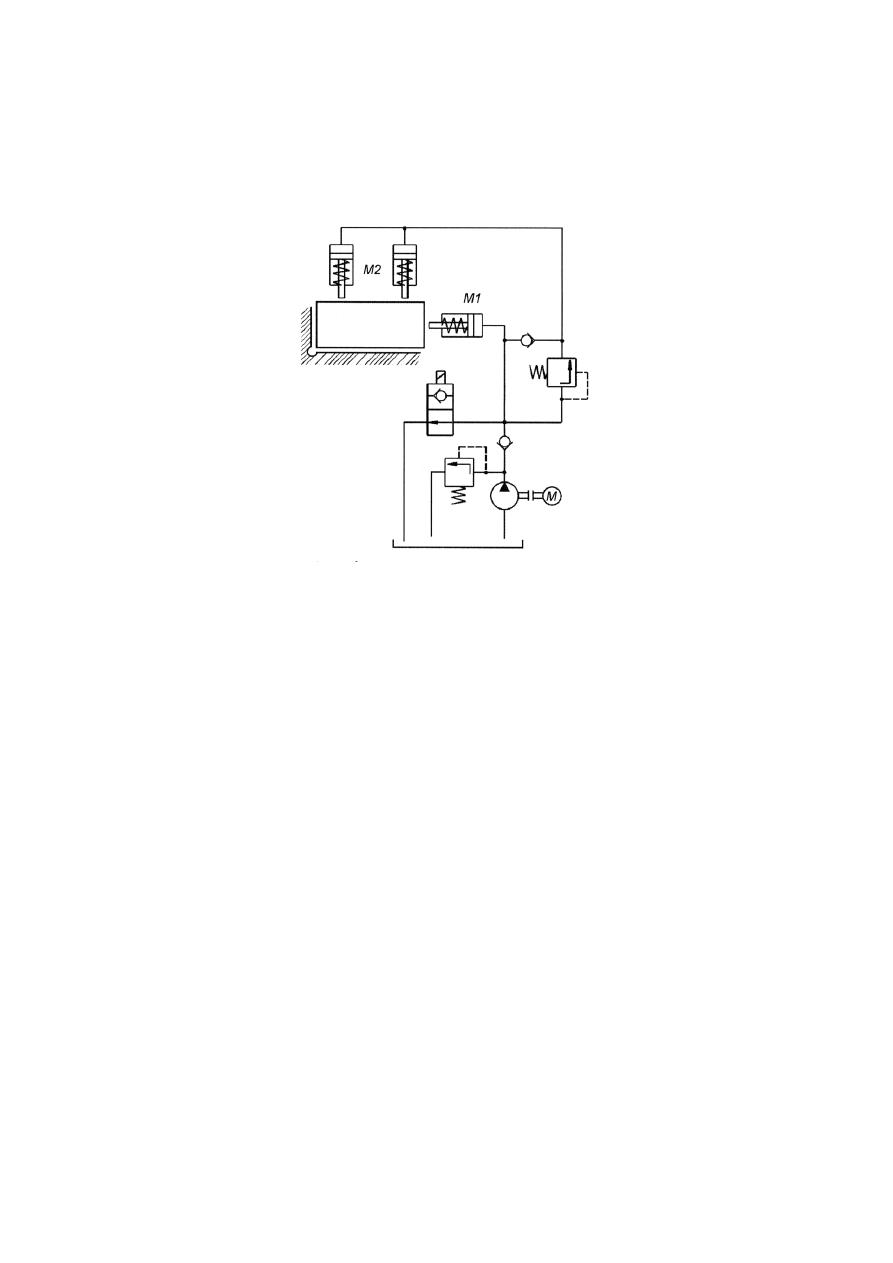
Rys.5. 6. Sterowanie sekwencyjne ciśnieniowe uchwytu obróbkowego zaworem
maksymalnym z wewnętrznym odprowadzeniem przecieków
W sterowaniu położeniowym organ wykonawczy oddziałuje na przyciski elektryczne lub
wyłączniki krańcowe, którymi sterowane są silniki pomp oraz elektromagnesy rozdzielaczy i
zaworów różnych rodzajów. Przy sterowaniu ciśnieniowym korzysta się z manometrów
stykowych i przełączników ciśnieniowych, natomiast w sterowaniu czasowym z przekaźników
czasowych.
Schemat hydrauliczny uchwytu rys.5.6 jest przykładem zastosowania sekwencyjnego sterowania
ciśnieniowego bezpośredniego. Włączenie mechanizmu rozdzielaczem elektromagnetycznym 2/2
powoduje uruchomienie siłownika M1, dociskającego element do opory pionowej. Po zaciśnięciu
przedmiotu następuje wzrost ciśnienia w obwodzie powoduje otwarcie zaworu maksymalnego i
uruchomienie siłowników M2
STANOWISKO LABORATORYJNE
Stanowisko składa się z typowych elementów hydrauliki siłowej zamocowanych na płycie
montażowej w sposób umożliwiający łączenie ich przewodami elastycznymi w dowolne układy
sterujące. Na rys. 5.7 przedstawiono układ sterowania sekwencyjnego, zależnego od drogi, dwóch
siłowników dwustronnego działania realizujący cykl roboczy zgodnie z cyklogramem
przedstawionym na rys. 5.8 zapewniający pracę siłowników w cyklu automatycznym i
pojedynczym.
W położeniu wyjściowym siłowników M1 i M2 tłoki znajdują się w wewnętrznym skrajnym
położeniu. Przyciskiem elektrycznym d wzbudzenia doznaje elektromagnes s, przesterowujący
lewy rozdzielacz w położenie, przy którym siłownik M1 wykonuje wysuwowy ruch roboczy.
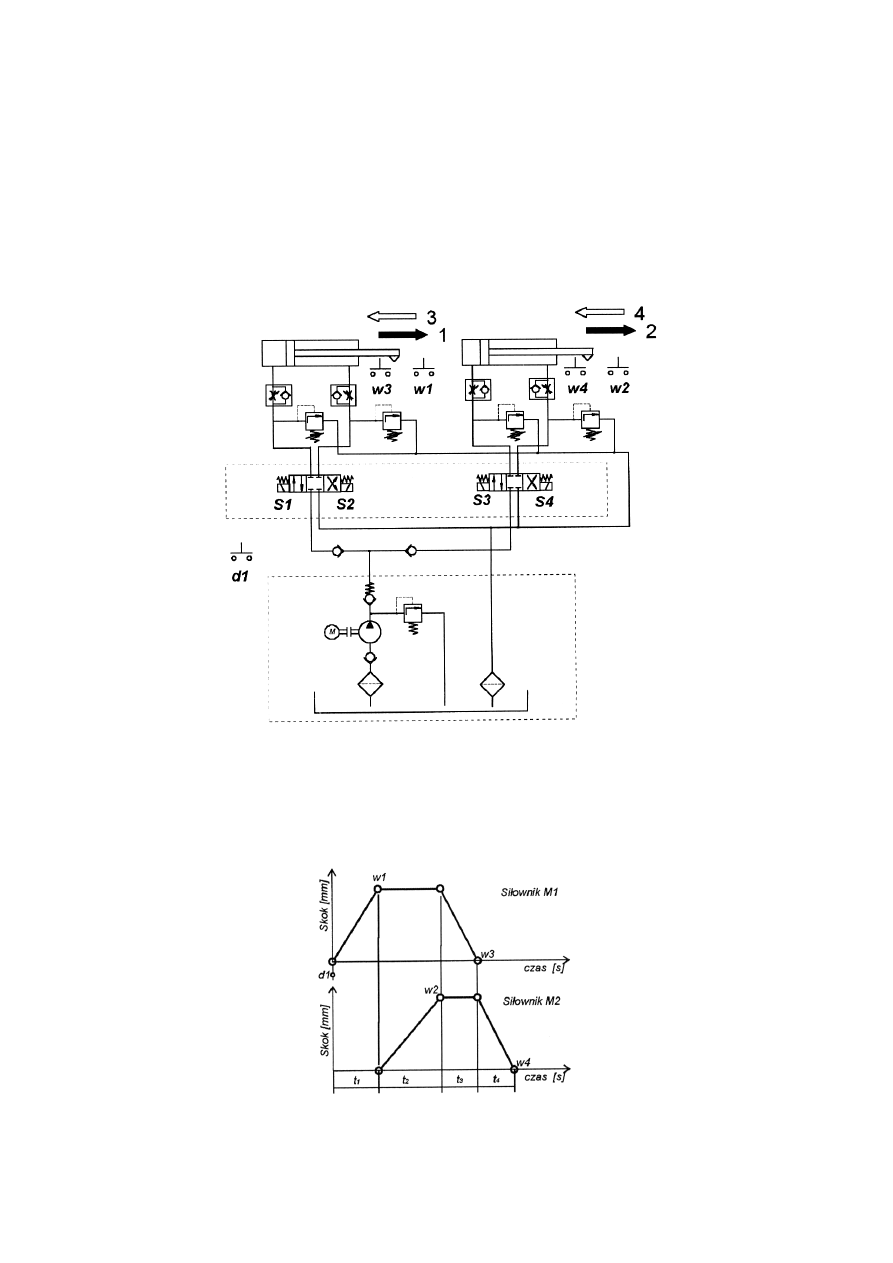
W końcowej fazie ruchu zderzak związany z tłoczyskiem wchodzi w kontakt z wyłącznikiem w,
inicjującym wzbudzenie elektromagnesu s3.
Elektromagnes przesterowuje rozdzielacz uruchamiający siłownik M2, który wykona ruch
wysuwowy. Tłoczysko siłownika, w skrajnym zewnętrznym położeniu, oddziałuje na wyłącznik
w2 i powoduje przesterowanie rozdzielacza lewego w położenie, przy którym tłoczysko siłownika
M1 wykonuje ruch powrotny. W skrajnym wewnętrznym położeniu wyłącznik w4 wzbudzi
elektromagnes s4, a więc przesteruje rozdzielacz prawy i uruchamia siłownik M2, który wykona
ruch wsuwowy. Wyłącznik krańcowy w4 wyłącza układ, który osiągnął w ten sposób stan
wyjściowy.
Rys.5. 7. Schemat hydrauliczny układu sterowania sekwencyjnego położeniowego: 1- stacja zasilająca, 2 -
zawór rozdzielający 4-drogowy 3-potożeniowy sterowany elektrycznie, 3 - zawory dławiąco-zwrotne, M1,
M2 - siłownik hydrauliczny dwustronnego działania z jednostronnym tłoczyskiem,
w1, w2, w3, w4 - wyłączniki krańcowe.
Rys.5. 8. Cyklogram pracy układu
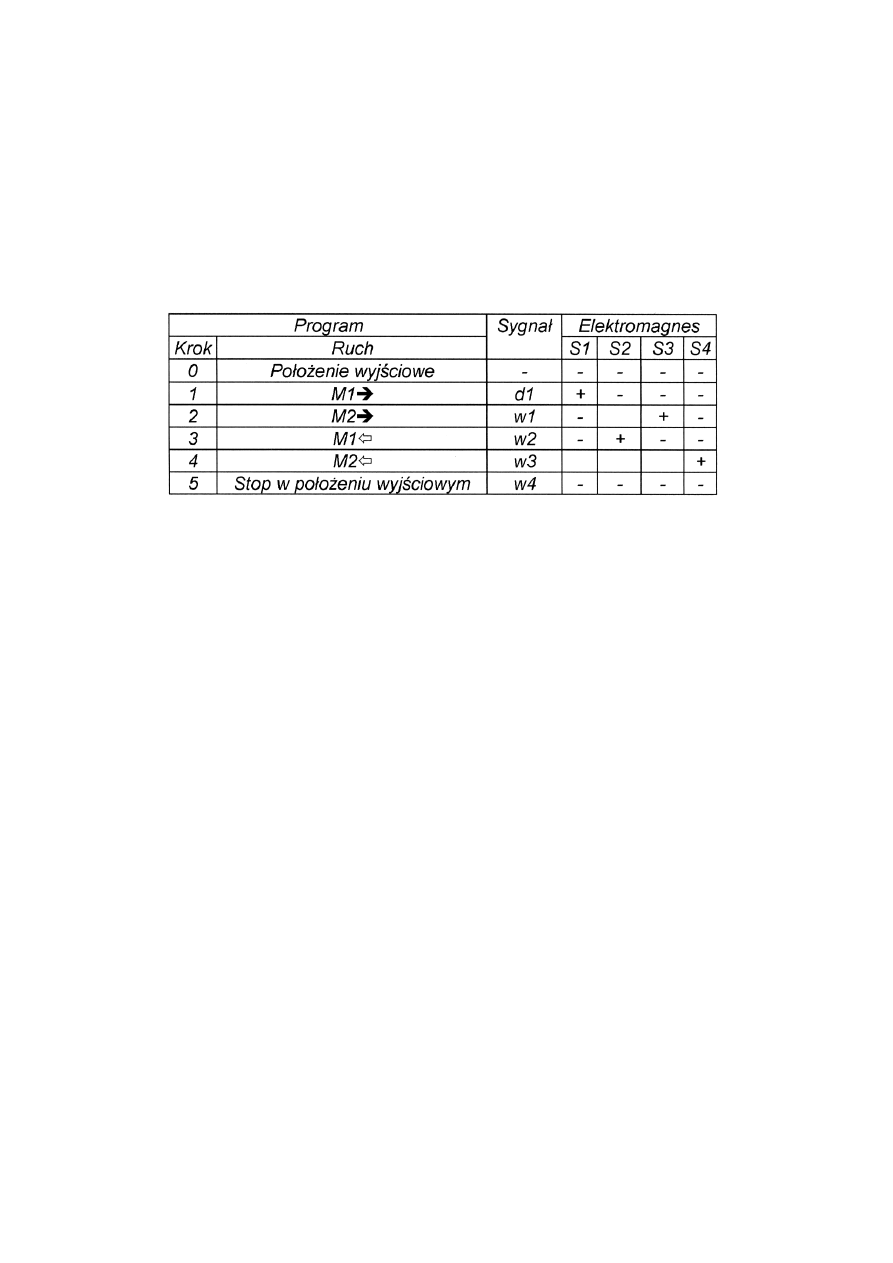
Przedstawioną na rys. 5.9 tabelę łączeń należy przed projektowaniem układu uzupełnić
dodatkowymi informacjami dotyczącymi np.:
- warunków, jakie muszą być spełnione w chwili uruchomienia programu,
-
zachowania się układu w przypadku zaniku prądu w sieci zasilającej,
-
sposobu sterowania w przypadku napraw
-
konieczności zatrzymania siłowników w dowolnym położeniu przez odrębny wyłącznik
d2
-
niedopuszczalności równoczesnego wzbudzenia elektromagnesów s1 i s2 oraz s3 i s4
-
wyposażenia układu w wyłącznik awaryjny, który podobnie jak w przypadku zaniku
prądu, wyłącza układ, a więc przerywa wzbudzenie wszystkich elektromagnesów.
Rys.5. 9. Tabela łączeń układu sterowania sekwencyjnego.
ZADANIE DO WYKONANIA
1. Zapoznać się z budową i zasadą działania elementów składowych układu stanowiska
2. Zmontować układ realizujący cykl roboczy zgodnie z cyklogramem przedstawionym na
rys.5.8, zapewniający pracę siłowników w cyklu automatycznym i pojedynczym.
3. Uruchomić układ i wyregulować prędkość wysuwu i powrotu tłoczysk siłowników zgodnie z
cyklogramem pracy układu.
4.
Przeanalizować
możliwość
zastosowania
dodatkowych
elementów
sterujących
zapewniających opóźnienie powrotu siłowników do pozycji wyjściowej.
PYTANIA KONTROLNE
1. Sterowanie układów hydraulicznych
2. Elementy sterujące
3. Układy z siłownikami jednostronnego działania
4. Układy z siłownikami dwustronnego działania
5. Sterowanie dwuręczne
6. Zacisk hydrauliczny Sterowanie sekwencyjne
7. Sterowanie bezpośrednie
8. Sterowanie pośrednie
9. Rodzaje sterowania pośredniego
10. Układ sterowania sekwencyjnego położeniowego
11. Cyklogram pracy układu
12. Tabela łączeń
LITERATURA UZUPEŁNIAJĄCA:
1. Stryczek S.: Napęd hydrostatyczny, t. 2. Warszawa WNT 1990.
2. Szydelski Z.: Elementy napędu i sterowania hydraulicznego i pneumatycznego. PWN,
Warszawa 1986.
Wyszukiwarka
Podobne podstrony:
Java 04 Instrukcje sterowania
Przeciwdzialanie konfliktom, kontrola i oceny w administracji publicznej Prawo jako instrument stero
Instrukcja sterowniki vag
Stalmark25do250Kw instrukcja sterownika
Instrukcja do zad proj 13 Uklad sterowania schodow ruchom
Instrukcja do ćw 06 Sterowanie pracą silnika indukcyjnego za pomocą falownika
Projekt P09 Sterowanie bramka Instrukcja id 399298
Instrukcja instalacji sterownika LAN
Instrukcja do zad proj 19 Układ sterowania bramy garażu
Instrukcja R4 Zał2 Sterownik SSK B05
Deinstalacja sterowników i kodeków, Porady-Instrukcje
instrukcja bhp przy obsludze frezarki pionowej i poziomej sterowanej numerycznie
Instrukcja do zad proj 17 Uklad sterowania prasy hydrauli
Projekt P08 Sterowanie dystry Instrukcja id 399294
Instrukcja obslugi sterownikow Nieznany
Projekt P07 Sterowanie brama Instrukcja id 399290
instrukcja do sterownika firmy FOX
więcej podobnych podstron