
1
1. UKŁADY PNEUMATYCZNE – w skrócie
1.1
Napęd pneumatyczny
Wyróżnia się dwa główne określenia odnośnie zastosowania sprężonego powietrza
w urządzeniach i mechanizmach. Te określenia to mianowicie:
•
napęd pneumatyczny,
•
sterowanie pneumatyczne.
Różnica pomiędzy tymi dwoma pojęciami wynika z różnych możliwości zastosowania czynnika
roboczego, jakim jest sprężone powietrze. Otóż może pełnić funkcję zarówno nośnika energii
(napęd pneumatyczny) jak i również nośnika informacji (sterowanie pneumatyczne). Istnieje
również możliwość stworzenia układu, który spełniałby obydwie funkcje jednocześnie (jest to
najczęściej spotykane rozwiązanie).
Definicja napędu w technice ma dwojakie znaczenia. Pierwsza z nich odnosi się do rodzaju
energii, która zostaje poddana zamianie na energię mechaniczną. Druga związana jest z elementami
i częściami maszyn, biorących udział w przekazaniu energii ruchu od jej generatora (silnika
dowolnego rodzaju) do zespołów mechanizmów wykorzystujących ów ruch.
Zgodnie z pierwszą definicją można powiedzieć, iż główną zasadą ich działania jest zmiana
określonego rodzaju energii na energię mechaniczną (głównie jest to ruch obrotowy lub posuwisty).
Do powyższej konwersji energii dochodzi poprzez zastosowanie odpowiedniego silnika
przystosowanego do zasilania określoną postacią energii.
W związku z tą definicją można wyróżnić kilka podstawowych rodzajów napędu:
•
napęd elektryczny,
•
napęd spalinowy,
•
napęd hydrauliczny,
•
napęd pneumatyczny.
Natomiast zgodnie z drugą definicją napędu, pod rozważania bierze się wszystkie elementy
pośrednie
znajdujące
się
pomiędzy
silnikiem
a
napędzanym
mechanizmem.
W takim znaczeniu można wymienić m.in. następujące rodzaje napędów:
•
zębaty,
•
śrubowy,
•
cierny,
•
cięgnowy.
Na podstawie powyższego podziału można zauważyć, iż podstawą działania napędu
pneumatycznego jest sprężony gaz (czynnik roboczy), który pełni funkcje przesyłową energii
między miejscem jej wytworzenia (np. kompresorem) a odbiornikiem, w którym zachodzi zamian
energii potencjalnej na mechaniczną. Na bardzo zbliżonej zasadzie działa również napęd
hydrauliczny.
1.2
Czynnik roboczy
Czynnikiem roboczym w napędach pneumatycznych jest sprężony gaz lub jego mieszanina
(najczęściej jest używane powietrze atmosferyczne). Dzięki temu, iż rola sprężonego powietrza
(pod względem funkcjonalnym) jest zbliżona do tej, jaką spełnia ciecz w napędach hydraulicznych
to możliwe jest zaklasyfikowanie tego medium, jako elementu, który w sposób znaczący wpływa na
pracę całego układu (sprawność, trwałość elementów składowych oraz charakterystyka pracy).
Do podstawowych zadań czynnika roboczego należą:
•
przenoszenie energii i sygnałów sterujących,
•
odprowadzanie ciepła,
•
smarowanie powierzchni ruchowych i par ciernych (powietrze naolejone).
W celu zapewnienia trwałości i niezawodności układów pneumatycznych należy
w odpowiedni sposób przygotować powietrze przed jego wprowadzeniem do układu. Zajmuje się
tym zespół przygotowania powietrza, który został opisany w dalszej części pracy. Do jego
podstawowych zadań można zaliczyć:
•
oczyszczenie czynnika roboczego z zanieczyszczeń,
•
uzyskanie ciśnienia o wymaganej wartości,

2
•
wprowadzenie do czynnika roboczego środka smarnego (w przypadku konieczności
smarowania elementów układu).
Po oczyszczeniu powietrze powinno charakteryzować się następującymi cechami:
•
brakiem wody w postaci kropel; woda w postaci pary jest dopuszczalna, gdy punkt rosy
występuje przy temperaturze niższej o 5-10°C od najniższej temperatury pracy układu,
•
zawartością zanieczyszczeń mechanicznych (o wymiarach cząstek poniżej określonej
wartości) nieprzekraczających dopuszczalnego udziału masowego w warunkach
znormalizowanej atmosfery odniesienia,
•
brakiem olejów (dla układów pneumatycznych bezsmarowych).
Najczęściej stosowanym czynnikiem roboczym w układach pneumatycznych jest sprężone
powietrze. Jego popularność wynika z następujących zalet, jakimi się charakteryzuje:
•
ogólnodostępność,
•
łatwość jego transportu za pomocą przewodów,
•
brak konieczności stosowania obiegów zamkniętych,
•
bezpieczeństwo stosowania (w razie rozszczelnienia instalacji nie ma ryzyka skażenia
środowiska naturalnego oraz niskie ryzyko uszkodzenia operatora),
•
odporność na zmiany temperatury otoczenia.
Jednakże sprężone powietrze posiada też kilka dość istotnych wad, do których zalicza się głównie:
•
dużą ściśliwość (utrudnia uzyskanie płynnych powolnych ruchów),
•
problemy z uzyskaniem pełnej szczelności układu.
1.3
Charakterystyka układów pneumatycznych
Podstawowym źródłem energii wykorzystywanym w układach pneumatycznych jest sprężone
powietrze, które to jest wytworzone przy wykorzystaniu kompresorów (sprężarek). Wykorzystuje
się w nich zazwyczaj silniki elektryczne, ale występują również sprężarki napędzane silnikiem
spalinowym. Ze względu na spadek ciśnienia, który wynika ze zjawisk związanych z przepływem
gazu wewnątrz instalacji, zwykło przyjmować się, iż maksymalna odległość, na jaką jest
transportowany czynnik wynosi ok. 1000 m. Stosunkowo łatwe jest natomiast przechowywanie
sprężonego
powietrza.
Może
to
się
odbywać
zarówno
w zbiornikach stałych jak i mobilnych (ruchomych). W pneumatyce siłowej możliwe jest uzyskanie
sił na poziomie 30kN. Uzyskuje się je przy stosunkowym niskim poborze mocy co wynika z faktu,
iż
ciśnienie
czynnika
roboczego
zazwyczaj
nie
przekracza
1,5MPa.
W systemach pneumatycznych regulacja siły polega na zmianie ciśnienia doprowadzanego do
aktorów. Zmiana prędkości odbywa się zazwyczaj poprzez dławienie czynnika roboczego, które
jest doprowadzane bądź też odprowadzane z przetwornika. Ogromną zaletą napędów
pneumatycznych jest możliwość ich stosowania w warunkach, gdzie może wystąpić zjawisko
samozapłonu. Ponieważ układy pneumatyczne nie mają obiegu zamkniętego to istotną wadą jest
hałas, który powstaje podczas wydostawania się czynnika do otoczenia.
W normie PN-73/M-73020 zawarty został podział elementów wchodzących w skład układów
pneumatycznych na następujące grupy:
•
elementy wykonawcze – dochodzi w nich do zamiany energii dostarczonego czynnika
roboczego na energię mechaniczną (silniki, siłowniki),
•
zawory – elementy regulujące przepływ czynnika roboczego,
•
zespół przygotowania, magazynowania i przesyłania czynnika roboczego,
•
elementy pomocnicze (wszelkiego rodzaju mierniki, złącza pneumatyczne oraz płyty
montażowe).
Coraz szersze zastosowanie układów pneumatycznych w budowie maszyn i urządzeń wynika z
bezpośrednich zalet, jakimi to charakteryzują się owe układy, są to miedzy innymi:
•
łatwość w zabezpieczaniu układu przed przeciążeniem (w momencie przekroczenia
maksymalnego obciążenia nie dochodzi do bezpośrednich uszkodzeń),
•
możliwość automatyzacji,
•
łatwość w przestrojeniu pracy całego układu,
•
możliwość ciągłej kontroli procesów technologicznych,

3
•
możliwość umieszczenia istotnych elementów sterowania w pobliżu operatora (ułatwia to
dostęp podczas ewentualnej awarii),
•
wysoki poziom znormalizowania części stosowanych w różnego typu maszynach, co
powoduje obniżenie kosztów wytworzenia kompletnego układu,
•
bezawaryjność (pod warunkiem prawidłowej eksploatacji),
•
możliwość indywidualnego dopasowania architektury układu do wymagań klienta.
Do wad urządzeń wykorzystujących napęd pneumatyczny należy zaliczyć:
•
problemy z pełną synchronizacją ruchów,
•
wpływ zmiany obciążenia zewnętrznego na prędkość aktorów,
•
ograniczenia długościowe w ruchu prostoliniowym.
1.4
Zastosowania urządzeń pneumatycznych
Na chwilę obecną pneumatyka znajduje duże zastosowanie w stosowanych rozwiązaniach
technicznych. W życiu codziennym, co chwilę napotykamy urządzenia wykorzystujące techniki
pneumatyczne, bądź też produkty wytworzone dzięki zastosowaniu pneumatyki. Bardzo często
nawet nie jesteśmy świadomi tego kontaktu. W wymienionych poniżej urządzeniach pneumatyka
znajduje zastosowanie, jako układ pomocniczy bądź też główny:
•
układy hamulcowe oraz aktywne zawieszenie w pojazdach dostawczych,
•
mechanizm zamykania drzwi w środkach komunikacji zbiorowej,
•
współrzędnościowe maszyny pomiarowe,
•
automaty pakujące,
•
maszyny do produkcji butelek PET,
•
wtryskarki,
•
manipulatory przemysłowe,
•
obrabiarki CNC,
•
systemy transportowe,
•
urządzenia sortujące,
•
rozlewarki,
•
dystrybutory,
•
narzędzia ręczne stosowane w budownictwie,
•
narzędzia ręczne na liniach montażowych,
•
inne.
4
2
ELEMENTY SKŁADOWE UKŁADÓW PNEUMATYCZNYCH
2.1
Zespoły przygotowania powietrza
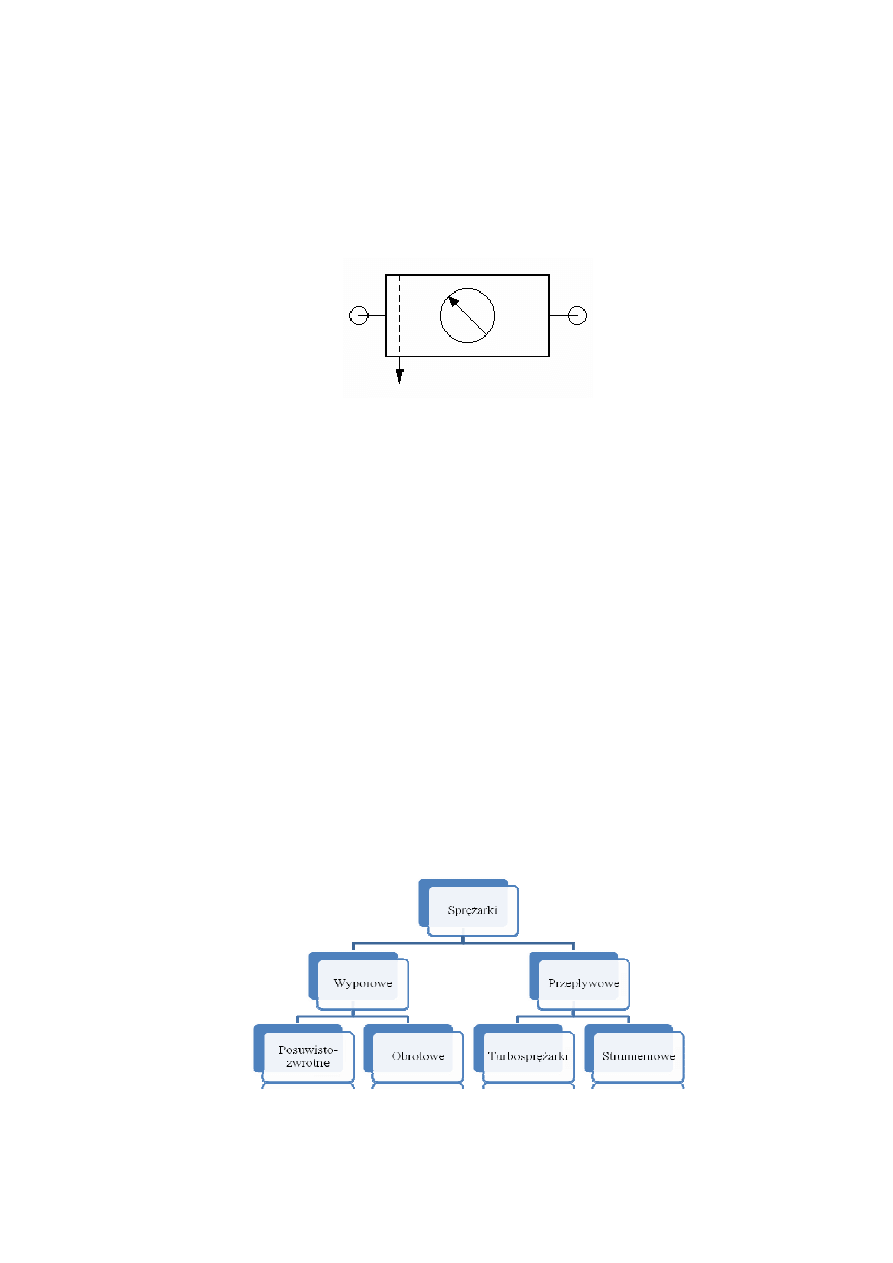
Zespół przygotowania powietrza (rys.1) zajmuje się nadaniem odpowiednich parametrów
sprężonemu powietrzu, co daje gwarancję prawidłowego działania układu oraz przedłuża
żywotność jego elementów składowych. W związku, z tym każdy układ pneumatyczny jest
wyposażony w specjalny układ, który ma za zadanie:
•
oczyszczenie powietrza,
•
zredukowanie ciśnienia do wymaganej wartości,
•
w razie zaistnienia konieczności: nasycanie czynnika roboczego mgłą olejową.
Rys.1. Uproszczony schemat zespołu przygotowania powietrza
W skład zespołu przygotowania powietrza wchodzą:
•
reduktory,
•
filtry,
•
smarownice.
W celu dokonania poprawnego doboru zespołu przygotowania powietrza w szczególności należy
zwrócić uwagę na następujące parametry:
•
całkowity wydatek powietrza wyrażony w[m
3
/h.] (im wyższy wydatek tym większy spadek
ciśnienia wewnątrz urządzenia),
•
ciśnienie robocze (powinno być niższe bądź równe niż wartość deklarowanego ciśnienia
maksymalnego dla jednostki uzdatniającej),
•
temperatura (nie powinna być wyższa niż 50°C).
2.2
Zespół sprężania powietrza
Głównym zadaniem sprężarki jest zwiększenie ciśnienia czynnika roboczego poprzez
zmniejszenie objętości w wyniku jego kompresję. Zgodnie z normą PN-89/M-43100 można
dokonać podziału sprężarek na dwie główne grupy:
•
sprężarki wyporowe,
•
sprężarki przepływowe.
Na rysunku 2 zaprezentowano przykładowy podział sprężarek ze względu na konstrukcję
Rys..2. Podział sprężarek [23]
5
2.2.1
Sprężarki wyporowe
Zasadą działania tego typu sprężarek jest zassanie określonej ilości powietrza (lub innego
gazu) do określonej zamkniętej przestrzeni i następującym po tym zwiększeniu ciśnienia na skutek
zmniejszenia tej objętości poprzez ruch jednej z ograniczających ją powierzchni. Dalszego podziału
wewnątrz tej grupy można dokonać na podstawie analizy charakteru ruchu roboczego, wówczas
otrzymamy następujące podgrupy:
•
o ruchu posuwisto-zwrotnym – zasysanie oraz sprężanie czynnika roboczego uzyskuje po
przez ruch posuwisto zwrotny elementu roboczego we wnętrzu komory sprężania,
•
o ruchu obrotowym – sprężenie gazu uzyskuje się po przez ruch łopatek lub elementów
zazębiających się.
2.2.2
Sprężarki wyporowe posuwisto-zwrotne
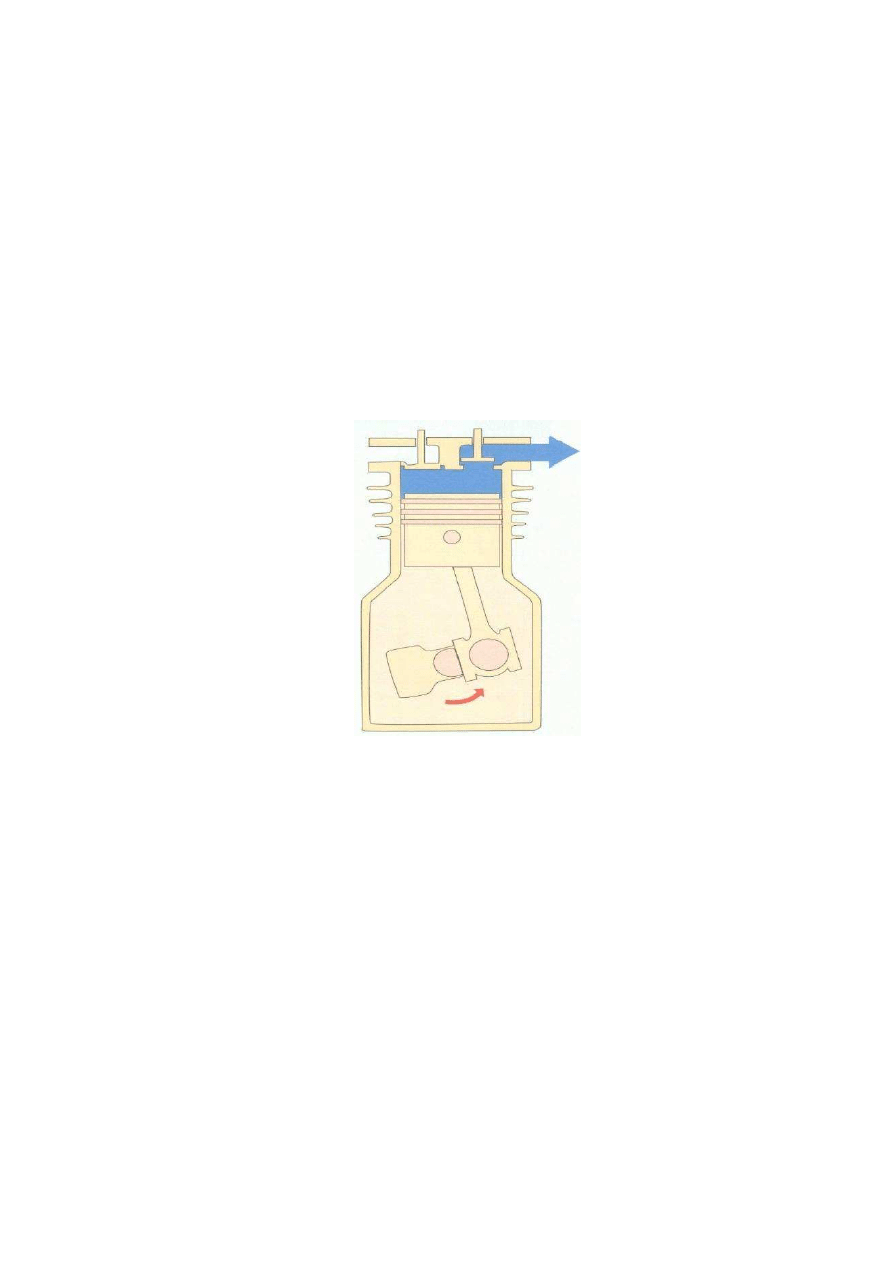
Sprężarki wyporowe tłokowe są najczęściej stosowanym typem sprężarek. Używa się nich
do wytworzenia ciśnienia od 1 do 25 bar przy wydajności rzędu 4÷200 m
3
/h. Elementem
sprężającym powietrze jest tłok, który wykonuje ruch posuwisto-zwrotny. W momencie
przemieszczania się w dół następuje zassanie powietrza, ruch ku górze jest odpowiedzialny za
sprężenie powietrza (rys. 3). Ilość tłoków oraz ich rozmieszczenie jest uzależnione od cech
indywidualnych danego kompresora.
Rys.3. Zasada sprężania kompresora tłokowego [1]
2.2.3
Sprężarki śrubowe
Ten typ sprężarki należy do grupy sprężarek wyporowych o ruchu obrotowym. Sprężanie gazu
powstaje na skutek zmniejszania się przestrzeni pomiędzy pracującymi śrubami na odcinku
pomiędzy otworami ssawnymi a otworami tłocznymi (rys. 4). Sprawność tego rozwiązania w dużej
mierze zależy od uzyskanej szczelności pomiędzy korpusem a śrubami oraz samymi śrubami.
Sprężarki tego typu znajdują swoje zastosowanie głównie w warunkach przemysłowych. Wynika to
z faktu, iż ich wydajność może sięgać nawet 10000m
3
/h. Często wewnątrz tego typu kompresorów
stosuje się ciecz (najczęściej jest to olej, ale również można spotkać rozwiązania z zastosowaniem
wody). Takie rozwiązanie ma na celu:
•
obniżenie temperatury pompy (zwiększa sprawność układu),
•
uszczelnienie przestrzeni roboczej (zapobiega przepływowi powrotnemu),
•
ochronie części ruchomych.
6
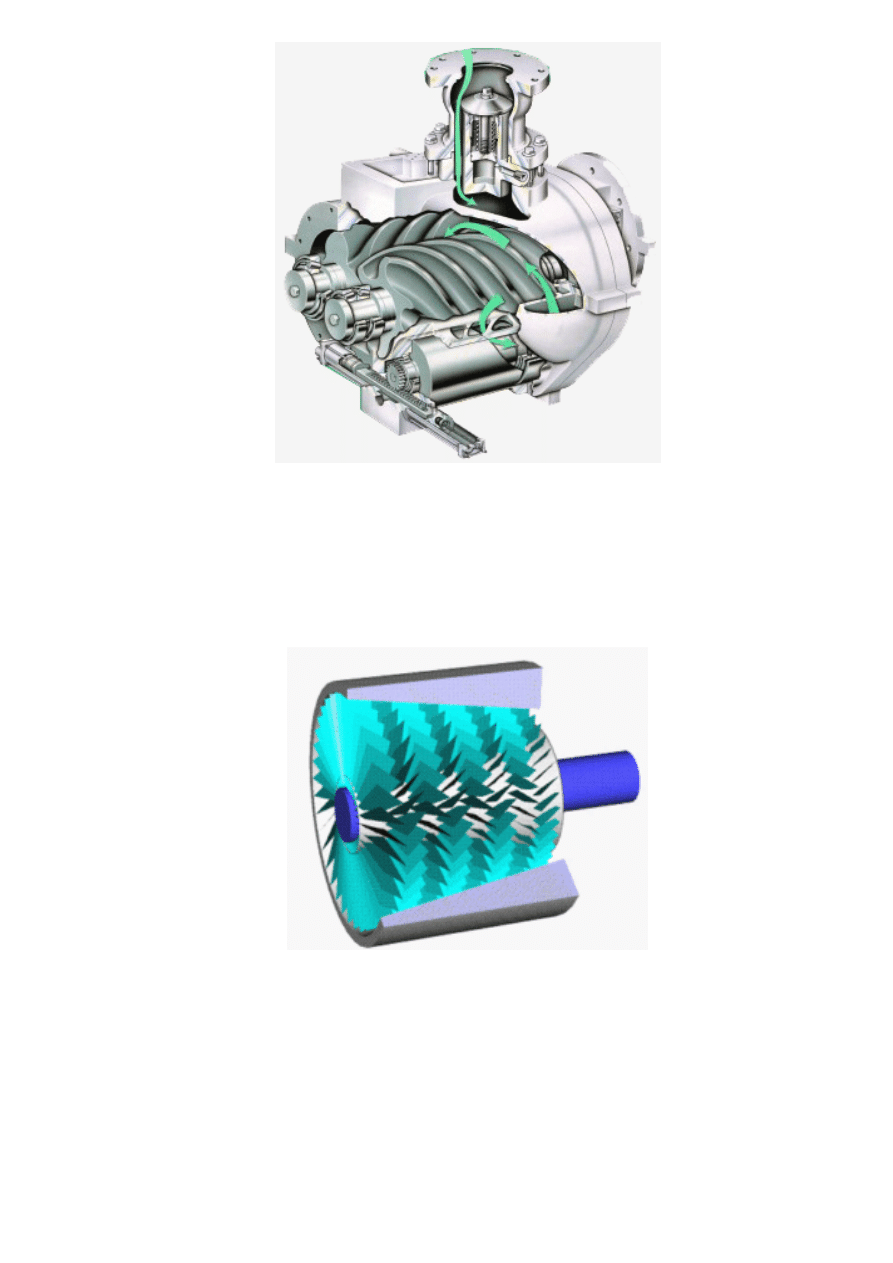
Rys.4. Budowa sprężarki śrubowej [2]
2.2.4
Sprężarki przepływowe
W tego typu sprężarkach (rys. 5) przyrost ciśnienia gazu powstaje na skutek oddziaływania
ukształtowanych w odpowiedni sposób elementów ruchomych (wirnika) oraz nieruchomego
korpusu zwanego również kierownicą. Na skutek oddziaływania sił wywołanych ruchem wirnika
od strony wlotu powstaje podciśnienie powodujące zasysanie gazu do środka sprężarki.
Kompresory tego rodzaju charakteryzują się bardzo dużą wydajnością dochodzącą nawet do
1400000 m³/h.
Rys.5. Przekrój sprężarki przepływowej [3]
2.3
Pneumatyczne elementy sterujące
Do najbardziej rozbudowanej grupy elementów stosowanych w układach pneumatycznych
należą części związane ze sterowaniem (zwane również potocznie zaworami). Są to elementy
odpowiedzialne za:
•
natężenie przepływu,
•
kierunek przepływu,
•
wartość ciśnienia.

7
Tak samo jak miało to miejsce w przypadku sprężarek tak i również w przypadku zaworów
możemy dokonać podziału na kilka grup oraz podgrup, w zależności od spełnianej przez zawory
funkcji:
A.
zawory sterujące kierunkiem przepływu:
•
rozdzielające,
•
szybkiego spustu,
•
zwrotne,
•
przełączniki obiegu,
•
odcinające,
•
podwójnego sygnału;
B.
zawory sterujące ciśnieniem:
•
ograniczające ciśnienie
•
regulatory ciśnienia,
•
różnicowe,
•
proporcjonalne,
•
kolejności działania;
C.
Zawory sterujące natężeniem przepływu:
•
dławiące,
•
dławiące proporcjonalne.
2.3.1
Zawory rozdzielające
Do zadań rozdzielacza (rys. 6) należy doprowadzenie bądź też odprowadzenie powietrza w
ściśle określonym czasie dla danego odbiornika (aktora). Na funkcjonalność tego typu zaworów
wpływ mają następujące czynniki:
•
ilość dróg przepływu – jest to ilość niepołączonych ze sobą w sposób trwały otworów,
miedzy, którymi w określonych położeniach następuje przepływ czynnika roboczego (w
najczęściej stosowanych modelach liczba dróg waha się w przedziale 2÷5),
•
ilość sterowalnych położeń – określa liczbę możliwych do uzyskania położeń zaworu
(najczęściej dwu- lub trójstanowe),
•
rodzaj sterowania – zawory mogą być sterowane mechanicznie, pneumatycznie, siłą
ludzkich mięśni bądź też w sposób mieszany,
•
odmiany sterowania – możemy w tym przypadku wyróżnić dwojaki podział ze względu na
sposób przekazywania mocy sterowania:
o
bezpośredni,
o
pośredni (z własnym układem wzmacniania sygnału),
ze względu na stan zaworu po odcięciu sygnału sterującego:
o
monostabilne (powracają do położenia pierwotnego),
o
bistabilne (utrzymują stan identyczny ze stanem w momencie przesyłu sygnału),
•
sposób zasilania – występują zawory zasilane przewodowo jak i bezprzewodowo.
Na chwilę obecną coraz częściej można się spotkać z hybrydową budową zaworów. Dlatego
też,
celowym
wydaje
się
być
dodatkowy
podział
rodziny
rozdzielaczy
z uwzględnieniem ich funkcji oraz budowy. Wówczas podział wygląda następująco:
•
rozdzielacze konwencjonalne (zwykłe) – odpowiedzialne są jedynie za kierunek przepływu,
•
rozdzielacze proporcjonalne – oprócz sterowania kierunkiem przepływu mogą regulować
natężenie przepływu bądź też ciśnienie,
•
rozdzielacze z wbudowanym serwomechanizmem.
8
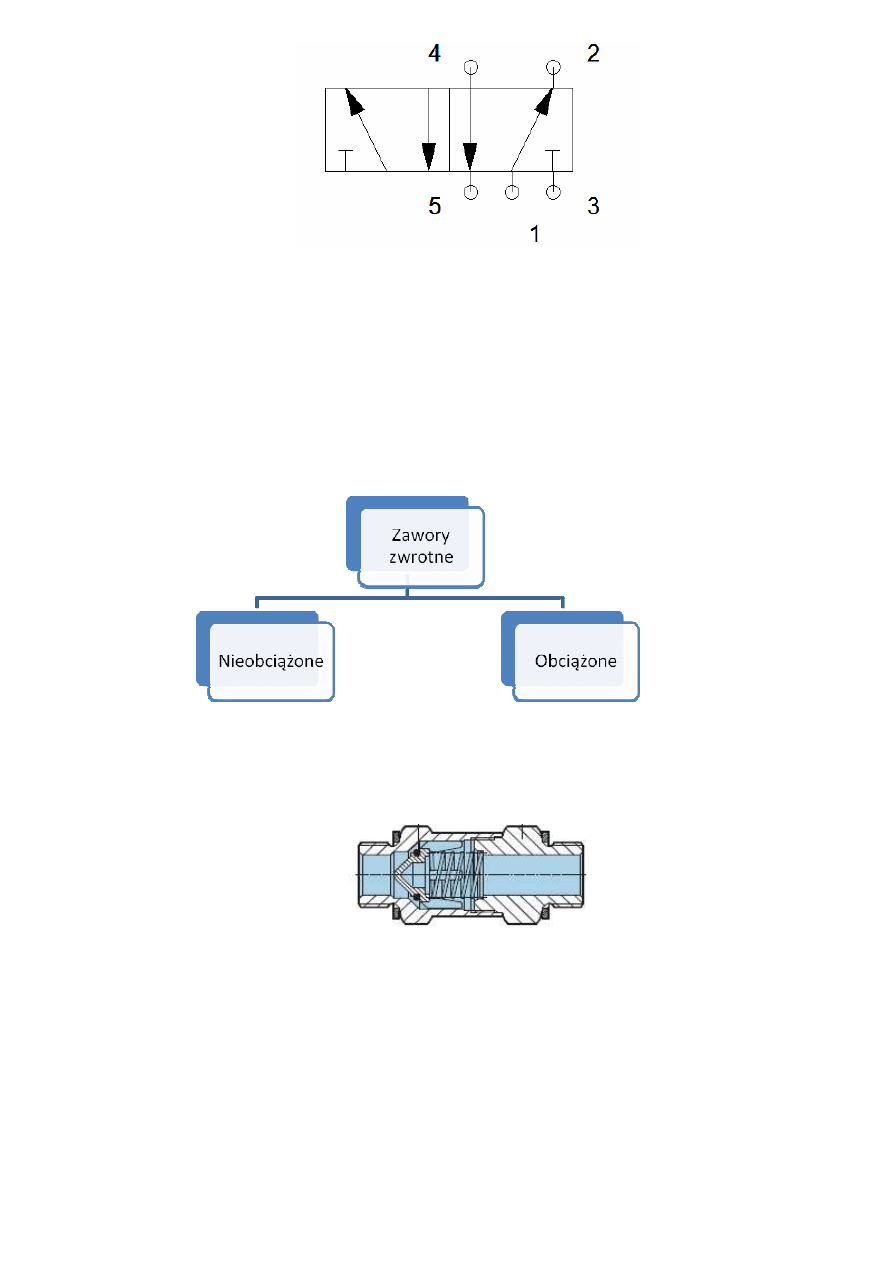
Rys.6. Przykładowy schemat zaworu rozdzielającego pięciodrogowego, 1 – przyłącze zasilające, 2 i 4 –
przyłącza robocze (wyjściowe), 3 i 5 – przyłącza odpowietrzające.
2.3.2
Zawory zwrotne
Zainstalowanie zaworu zwrotnego w obwodzie umożliwia przepływ gazu tylko
w jednym kierunku. Powinien być zamontowany możliwie blisko odbiornika w celu jego ochrony
przed skutkami gwałtownego spadku ciśnienia wewnątrz sieci. Produkowane są również zawory
zwrotne sterowane (tzw. zamki pneumatyczne). W odróżnieniu od zaworów standardowych można
w nich zmieniać kierunek przepływu gazu przy pomocy dodatkowego wejścia z układu sterowania,
które to determinuje otwarcie bądź zamknięcie przepływu.
Zawory zwrotne mogą występować w dwóch odmianach. Ich podział został zaprezentowany
na rysunku 7.
Rys.7. Podział zaworów zwrotnych [22]
W przypadku zaworów nieobciążonych ciśnienie dostarczone musi być wyższe od ciśnienia po
stronie odbiornika. Natomiast w przypadku zaworu obciążonego (rys. 4.8) dochodzi dodatkowa
siła, którą musi pokonać dostarczany gaz. wynika ona z oporu stawianego przez wbudowaną
sprężynę. Dzięki temu rozwiązaniu ustawienie zaworu nie ma żadnego wpływu na jego
charakterystykę.
Rys.8. Przykładowa budowa zaworu zwrotnego obciążonego [4]
2.3.3
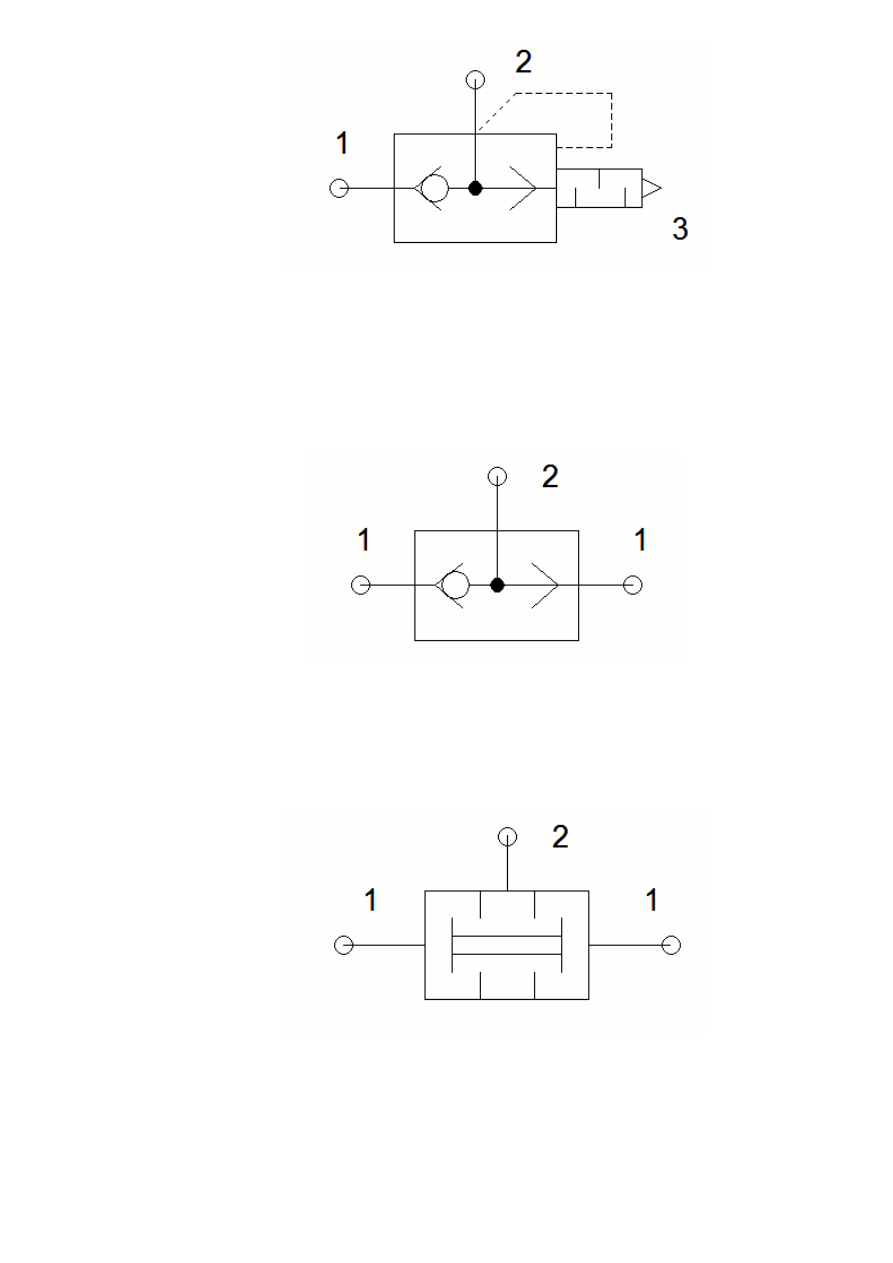
Zawory szybkiego spustu
Zawory te (rys. 9) są odpowiedzialne za samoczynne otworzenie drogi wyjściowej medium
do atmosfery w momencie spadku ciśnienia w drodze wejściowej. Ma to na celu jak najszybsze
opróżnienie komór aktora. Umożliwia to znaczne zwiększenie prędkości ruchu, zwłaszcza w
przypadku tłoka jednostronnego działania.
9
Rys.9. Schemat zaworu szybkiego spustu, 1 – przyłącze zasilające, 2 – przyłącze robocze (wyjściowe), 3 –
przyłącze odpowietrzające.
2.3.4
Przełączniki obiegu
W
zaworach
tego
typu
(rys.
10)
realizowana
jest
funkcja
logiczna
OR.
W momencie pojawienia się w jednej z dróg zasilania ciśnienia, w tym samym momencie następuje
zamknięcie drugiej linii zasilającej. W przypadku pojawienia się obu sygnałów jednocześnie do
wyjścia zostanie skierowany mocniejszy sygnał. Rozwiązanie to zostało podyktowane faktem, iż
czasem występuje konieczność uruchomienia odbiornika z kilku różnych miejsc. Konstrukcją jak i
również zasadą działania zawór ten jest bardzo zbliżony do zaworu zwrotnego.
Rys.10. Schemat przełącznika obiegu, 1 – przyłącza zasilające, 2– przyłącze robocze (wyjściowe).
2.3.5
Zawory podwójnego sygnału
W zaworach podwójnego sygnału (rys.11) podobnie jak prezentowanym powyżej rodzaju
zaworu, występują dwie drogi wejściowe i jedna droga wyjścia. Tak samo jak przełącznik obiegu
jest
to
zawór
logiczny
z
tą
jednak
różnicą,
że
realizuję
funkcję
AND.
W momencie pojawienia się dwóch sygnałów wejściowych na wyjściu pojawi się sygnał równy, co
do wartości niższemu ciśnieniu.
Rys.11. Schemat zaworu podwójnego sygnału, 1 – przyłącza zasilające, 2– przyłącze robocze (wyjściowe).
2.3.6
Zawory odcinające
Zawory te (rys. 12) należą do grupy zaworów dwudrogowych i służą do czasowego
zamykania bądź otwierania przepływu na danym odcinku układu. Umożliwiają przepływ czynnika
roboczego w dowolnym kierunku. W pozycji otwartej pozwalają na przepływ swobodny gazu,
podczas gdy w momencie zamknięcia całkowicie go blokują (położenia pośrednie ograniczają
10
przepływ). Zawory odcinające znajdują zastosowanie w miejscach, gdzie może wystąpić
konieczność czasowego odcięcia elementu składowego od całości układu w celu dokonania
stosownego przeglądu, wymiany bądź też naprawy. Często też, stosuje się je przed rzadziej
stosowanymi odcinkami układu np. w celu odciążenia sprężarek. Zawory odcinające znajdują
również zastosowanie przy zbiornikach ciśnieniowych, gdzie często pełnią rolę zaworów
spustowych.
Rys.12. Schemat zaworu odcinającego normalnie zamkniętego, 1 – przyłącze zasilające, 2– przyłącze
robocze (wyjściowe).
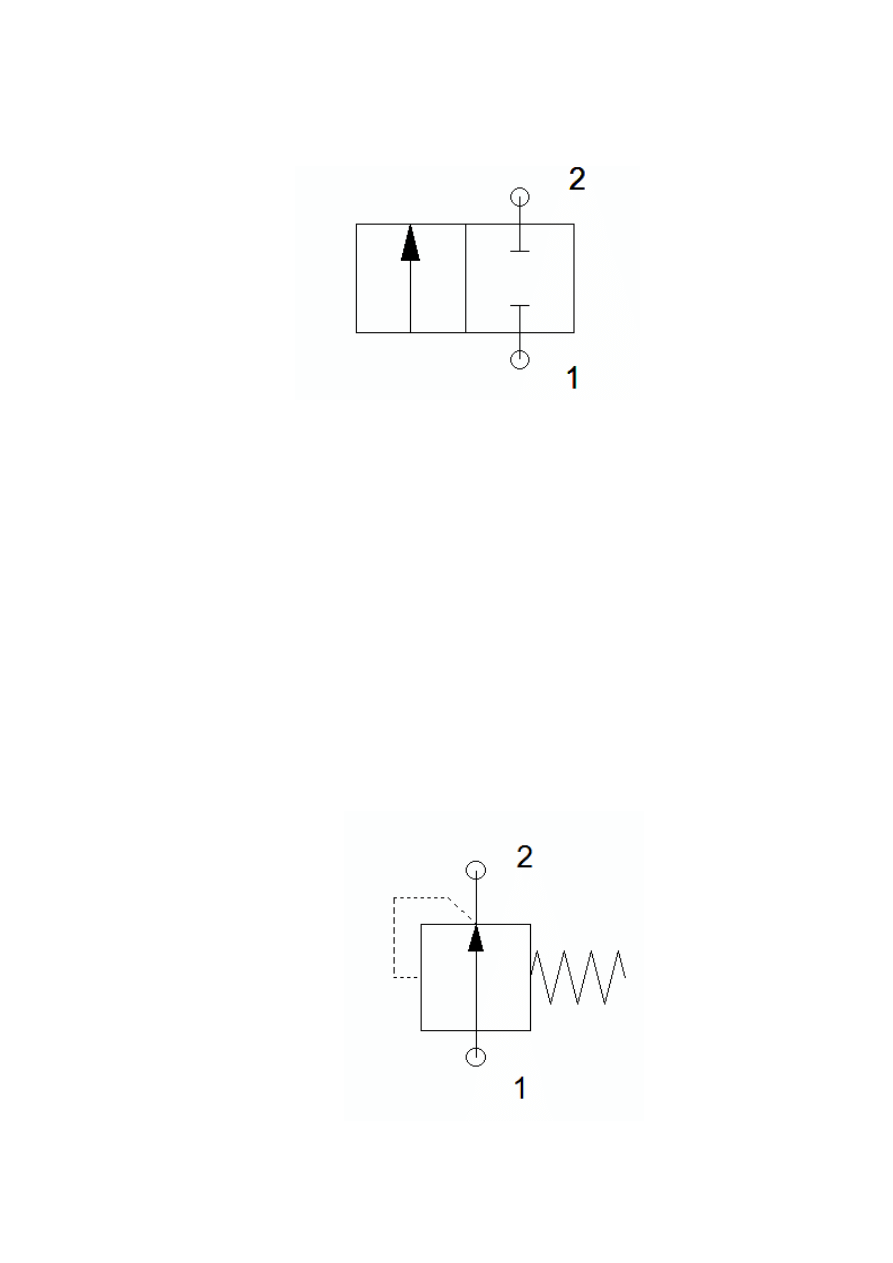
2.3.7
Zawory ograniczające ciśnienie
Głównym zadaniem tego typu zaworów jest zabezpieczenie całego układu przed
zniszczeniem na skutek ponadnormatywnego zwiększenia się ciśnienia. Ze względu na role, jaką
pełnią często są określane mianem zaworów bezpieczeństwa, bądź też zaworów maksymalnych. Ze
względu na dość istotną rolę, jaką pełnią w układach pneumatycznych wymaga się od nich otwarcia
i zredukowania ciśnienia w jak najkrótszym czasie (nawet, gdy skok ciśnienia miał charakter
impulsowy). W zawór takiego typu wyposażone jest większość kompresorów dostępnych na rynku.
2.3.8
Regulatory ciśnienia
Regulatory ciśnienia (rys 13), nazywane również potocznie zaworami redukcyjnymi, należą
do grupy elementów najczęściej stosowanych w układach pneumatyki. Dzięki ich zastosowaniu
możliwe jest zmniejszenie (zredukowanie) ciśnienia, jakie jest na wejściu do wartości wcześniej
zadanej i utrzymanie go bez względu na zakres zmian ciśnienia wejściowego czy też zmian
natężenia przepływu czynnika roboczego na wejściu. Można wyszczególnić wiele rodzajów
regulatora ciśnienia, jednakże w rzeczywistych układach pneumatycznych można się spotkać
głównie z regulatorem obniżającym ciśnienie. Zawór ten uniemożliwia wzrost ciśnienia powyżej
zadanego pułapu.
Rys.13. Schemat regulatora ciśnienia, 1 – przyłącza zasilające, 2– przyłącze robocze (wyjściowe).
11
2.3.9
Zawory różnicowe
Zawory różnicowe są odpowiedzialne za utrzymywanie stałej różnicy pomiędzy wartością
ciśnienia wejściowego a wartością ciśnienia wyjściowego. Zawory te mogą być nastawiane w
sposób manualny bądź też mogą posiadać możliwość nastawienia poprzez zewnętrzne układy
sterujące.
2.3.10
Zawory kolejności działania
Zawór kolejności działania, jest też nazywany zaworem sekwencyjnym. Wynika to ze
specyficznej funkcji, jaką pełni w układzie. Jest on odpowiedzialny jest za odcięcie jednej
z odnóg układu aż do momentu osiągnięcia określonego ciśnienia. Zawory tego typu są
przeznaczone zazwyczaj do sekwencyjnego załączania dwóch lub większej ilości obwodów układu
pneumatycznego.
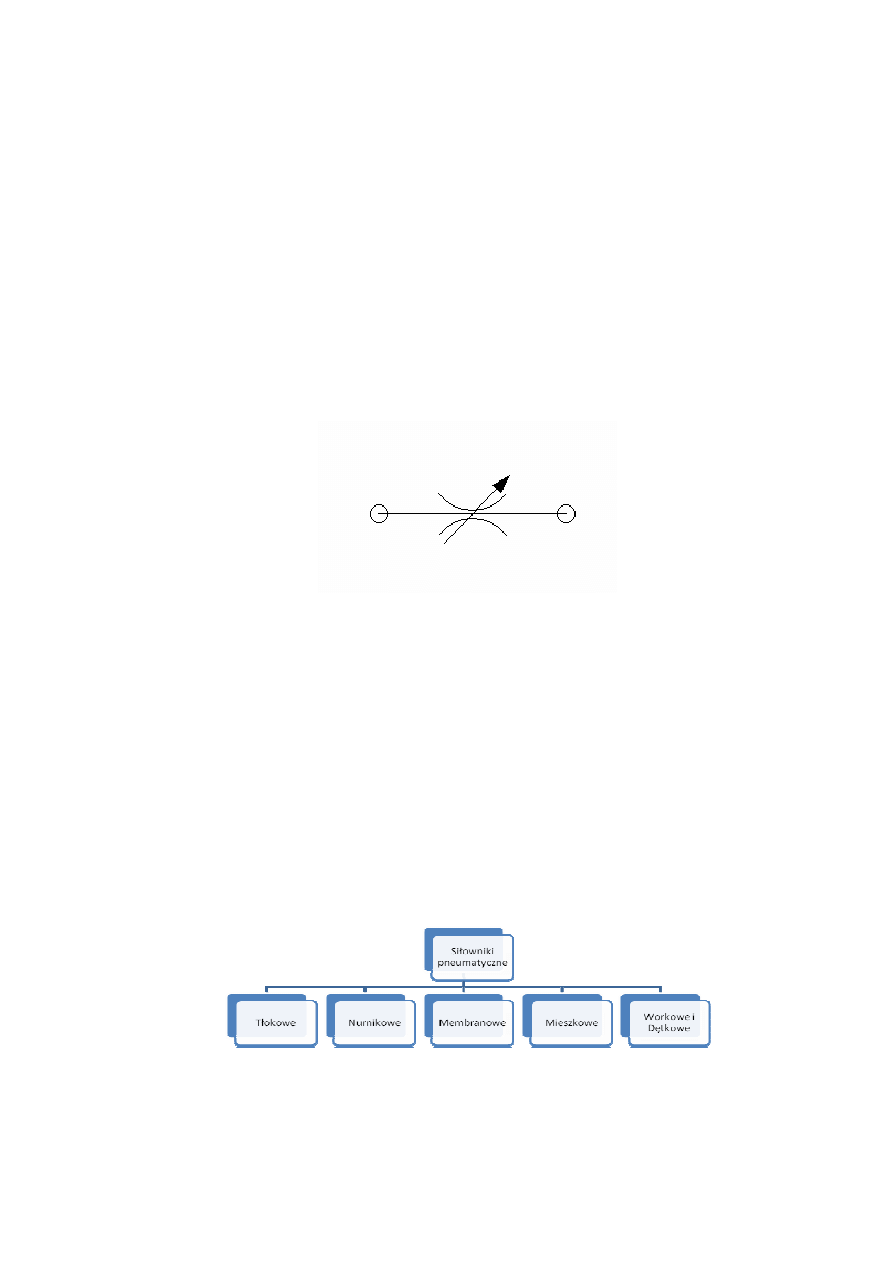
2.3.11
Zawory sterujące natężeniem przepływu
Zawory te (rys. 14) mają za zadanie ustalenie żądanej wartości natężenia przepływu
czynnika roboczego w układzie. Można do nich zaliczyć:
•
zawory dławiące zwykłe (nastawy dokonywane są ręcznie, mechanicznie lub
elektromechanicznie),
•
zawory proporcjonalne – dzięki specyficznej budowie umożliwiają automatyczną zmianę
wartości natężenia przepływu poprzez zmianę sygnału sterującego.
Rys.14. Schemat zaworu regulującego natężenie przepływu
2.4
Siłowniki
Siłowniki pneumatyczne są elementami bezpośrednio odpowiedzialnymi za zamianę energii
potencjalnej sprężonego powietrza w energię mechaniczną. Dzięki temu znajdują one zastosowanie
w pneumatycznych układach napędowych, gdzie są odpowiedzialne za wprawianie w ruch
elementów maszyn oraz mechanizmów. W celu zapewnienia poprawnego działania oraz
zadowalającej trwałości siłowników, należy doprowadzić do nich odpowiednio przygotowany
czynnik roboczy.
2.4.1
Podział siłowników pneumatycznych
Ponieważ siłowniki są bardzo liczną grupą elementów, to występuje wiele możliwości podziału.
Poniżej została zaprezentowana część z nich (rys.15÷20).
Rys.15. Podział siłowników ze względu na konstrukcję [22]
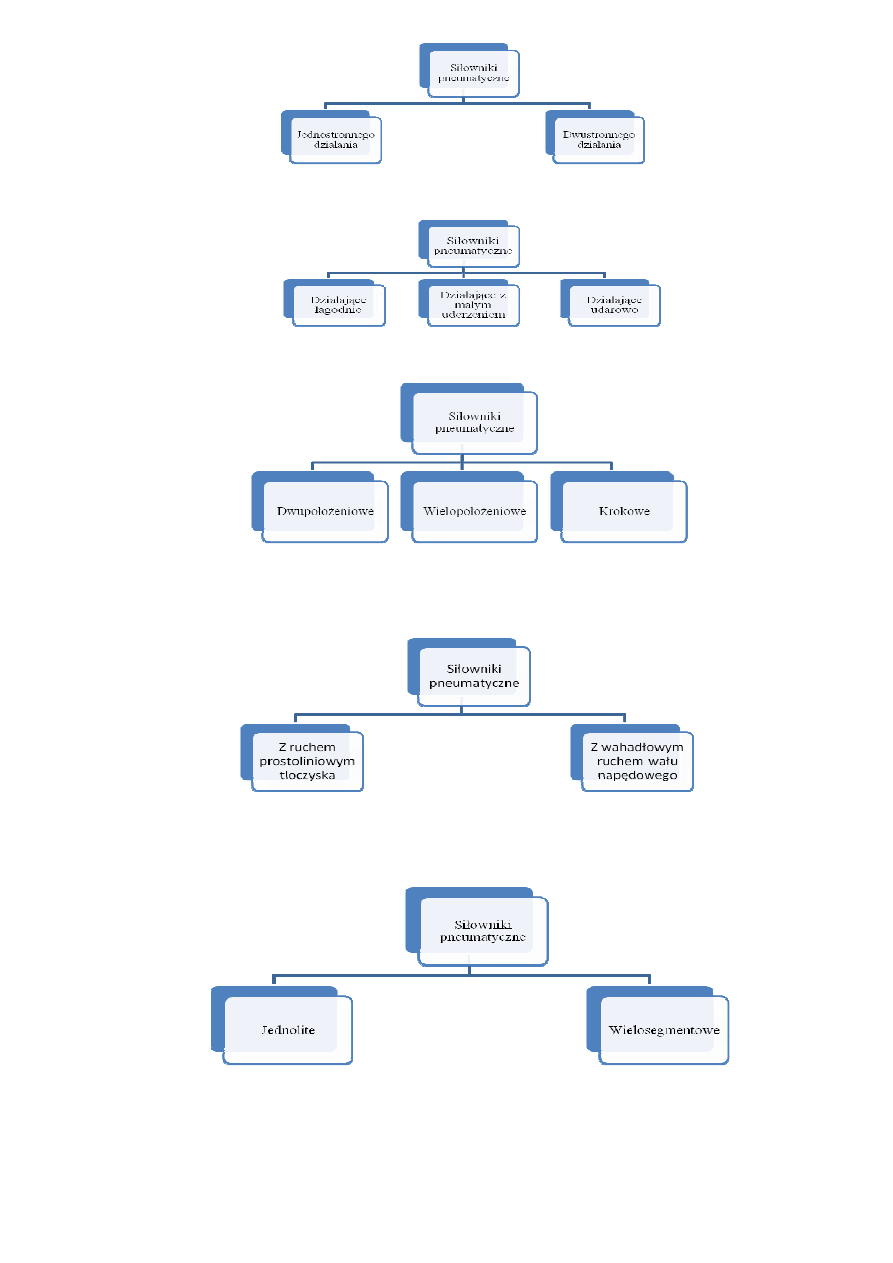
12
Rys.16. Podział ze względu na możliwości wywierania przez nie siły [22]
Rys.17. Podział ze względu na charakter zmiany siły działającej na element wykonawczy [22]
Rys.18. Podział ze względu na liczbę ściśle określonych położeń roboczych tłoczysk siłowników [22]
Rys.19. Podział ze względu na rodzaj ruchu realizowanego przez siłownik [22]
Rys.20. Podział ze względu na budowę konstrukcyjną tulei i tłoczyska [22]
2.4.2
Podstawowe części siłownika
13
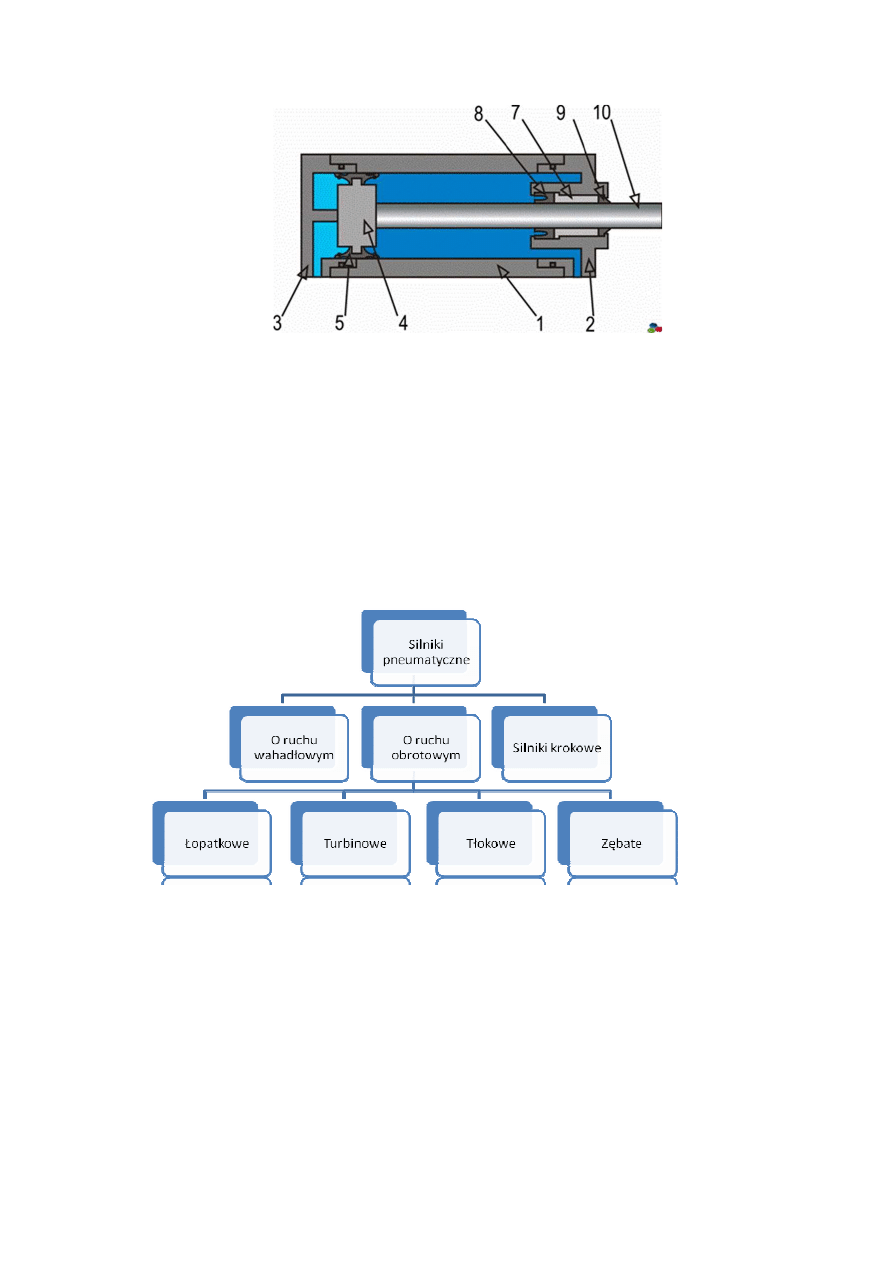
Ze względu na mnogość rozwiązań występujących w budowie siłowników pneumatycznych,
do zaprezentowania budowy został wybrany najbardziej rozpowszechniony siłownik tłokowy (rys.
21).
1 - tuleja cylindrowa, 2 - pokrywa przednia, 3 - pokrywa tylna, 4 - tłok, 5 - pierścień uszczelniający połączenie
ruchowe tłoka, 6 - tłoczysko, 7 - tuleja prowadząca tłoczysko, 8 - pierścień uszczelniający umieszczony w pokrywie
przedniej, 9 - pierścień zgarniający
2.5
Silniki pneumatyczne
W przypadku silników pneumatycznych (podobnie jak w przypadku omawianych wcześniej
siłowników) mamy do czynienia z zamianą energii potencjalnej sprężonego powietrza w energię
mechaniczną. W przypadku budowy silników pneumatycznych można zauważyć analogię w
stosunku do opisywanych już wcześniej sprężarek. Istotą różnicą pojawiającą się pomiędzy tymi
dwoma rodzajami elementów jest kierunek zamiany energii. W przypadku sprężarek dochodziło do
zamiany energii mechanicznej w energię potencjalną. Przykładowy podział silników
pneumatycznych został zaprezentowany na rysunku 22.
Rys.22. Podział silników pneumatycznych [22]
Na podstawie powyższego podziału można zauważyć, iż tylko silnik krokowy nie posiada
swojego bezpośredniego odpowiednika. Wynika to z faktu, iż jest to silnik wyposażony w
odpowiedni układ elektroniczny umożliwiający określić ruch, jaki wykonał oraz nadzorować
wykonywanie kolejnych ruchów (poprzez sprzężenie zwrotne).
2. WYBRANE METODY DETEKCJI NIESZCZELNOŚCI UP
W celu przeprowadzenia ćwiczeń laboratoryjnych zaproponowano trzy metody, które zostały
pokrótce scharakteryzowane.
Rys.21 Budowa siłownika pneumatycznego [5]
6

14
2.1
Badania metodą bąbelkową
W metodzie tej wykorzystuje się dwa podstawowe zjawiska, jakimi są napięcie
powierzchniowe oraz lepkość cieczy.
Napięcie powierzchniowe jest to zjawisko fizyczne, które występuje na styku cieczy z
gazem, ciałem stałem bądź też inną cieczą. Dzięki temu zjawisku powierzchnia zachowuje się
niczym sprężysta błona. Przyczyną napięcia powierzchniowego są siły cząsteczkowe znajdujące się
pomiędzy molekułami płynu. Ograniczenie występowania powyższego zjawiska można osiągnąć
po przez dodanie do cieczy substancji powierzchniowo czynnych, czyli tak zwanych surfaktantów.
Do tej grupy zaliczają się wszelkiego rodzaju mydła, detergenty oraz emulgatory.
Drugą właściwością wykorzystywaną w badaniu tą metodą jest lepkość cieczy. Określana
jest ona jako tarcie wewnętrzne płynów. Jest to właściwość płynów i ciał stałych charakteryzująca
opór wewnętrzny przeciwdziałający płynięciu.
Na skutek obniżenia napięcia powierzchniowego oraz wzrostu lepkości cieczy otrzymujemy
warunki sprzyjające do wytworzenia piany. Piana jest to mieszanina, w której ośrodkiem
rozpuszczającym jest ciecz a fazą rozpuszczaną gaz.
W metodzie bąbelkowej najlepiej wykorzystywać płyny o jak najmniejszym napięciu
powierzchniowym jednocześnie z możliwe jak największą lepkością. Powstały w ten sposób środek
ma właściwości pianotwórcze. W momencie jego naniesienia na element badanego układu
pneumatycznego będącego pod ciśnieniem, który uległ uszkodzeniu (np. rozszczelnieniu) dojdzie
do wytworzenia się piany. Dzięki temu będzie możliwa lokalizacja nieszczelności oraz jej
późniejsza naprawa. Metoda ta charakteryzuje się bardzo niskim nakładem finansowym. W celu
przeprowadzenia badań wystarczy posiadać wodę oraz detergent lub mydło. Problematyczne może
się natomiast okazać nanoszenie samej substancji w ciężko dostępne miejsca a także późniejsza
analiza, która w dużej mierze może być subiektywna.
2.2. Badania z wykorzystaniem otwartego płomienia
Metoda ta polega na skłonności płomieni do odchylania się na skutek ruchów powietrza.
Zwrot odchylenia płomienia jest zgodny z kierunkiem przepływu gazu. Natomiast poziom
odchylenia jest uzależniony natężenia przepływu. Ponieważ płomień jest efektem procesu spalania
to nie powinno się go stosować do sprawdzania szczelności układów w warunkach grożących
wybuchem, bądź też zapłonem jednego z elementów układu.
2.3.
Badania metodami ultradźwiękowymi
Badania te polegają na wykorzystaniu detekcji fal w zakresie ultradźwięków, czyli
dźwięków o częstotliwości powyżej 20kHz. Ultradźwięki towarzyszą zazwyczaj procesowi
rozprężania się gazu. Ultradźwięki występujące w powietrzu charakteryzują się bardzo krótkimi
falami λ≤0,017m. Dodatkowo obszar ich oddziaływania jest ograniczony, im wyższa częstotliwość
tym silniej są one tłumione. Poziom tłumienia fali akustycznej jest przyjmowany na poziomie:
•
0,3dB/m dla 10kHz,
•
3dB/m dla 100kHz,
•
40dB/m dla 400kHz.
Hałas ultradźwiękowy jest określany w paśmie częstotliwości 20-kHz- 100kHz.
W celu przeprowadzenia badań metodami ultradźwiękowymi konieczne jest dysponowanie
specjalistycznymi urządzeniami pomiarowymi, bądź też mikrofonem i układem pomiarowym
rejestrującym dźwięki w paśmie powyżej 20kHz.
W celu przeprowadzenia badań wprowadzonych nieszczelności w zestawie próbek można
wykorzystać urządzenia będące na wyposażeniu laboratorium takie jak Ultraprobe 2000 i Amprobe
ULD-100 oraz miernik poziomu dźwięku RFT 000017
•
Podstawowe parametry urządzenia Ultraprobe 2000 (rys. 23)
o
zakres
regulacji
pasma
częstotliwości
(selektywne):
20-100
kHz
lub
szerokopasmowo (20-100kHz),
o
przełącznik umożliwiający zastosowanie skali logarytmicznej lub skali liniowej,

15
o
dodatkowe wyjście umożliwiające rejestrację sygnału (0 - 50 mV),
o
precyzyjny potencjometr do regulacji wzmocnienia (helipot 10-cio obrotowy)
o
możliwość detekcji nieszczelności układów ciśnieniowych jak i podciśnieniowych.
Rys.23. Ultraprobe 2000 [12]
•
Amprobe ULD-100 (rys. 24)
o
częstotliwość pomiarowa: 30kHz -42 kHz,
o
wskaźnik poziomu sygnału wejściowego oparty na 10 elementach typu LED,
o
czas pracy na baterii: 15 godzin,
o
transmiter umożliwiający detekcję szczelności hermetyzacji pomieszczeń lub
przestrzeni, między którymi nie występuje przepływ gazu,
o
możliwość detekcji nieszczelności układów ciśnieniowych jak i podciśnieniowych.
Rys.24. Amprobe ULD-1000 [13]
•
miernik dźwięku RFT 00017 wyposażony w mikrofon umożliwiający rejestrację
dźwięków w paśmie ultradźwiękowym (rys. 25)
Układ ten oprócz pomiarów dźwięku w paśmie słyszalnym umożliwia wykonanie pomiarów w
pasmach oktawowych obejmujących zakres ultradźwięków (częstotliwości środkowych pasm
oktawowych od 31,5 Hz do 63 kHz).

16
Rys.25. Precyzyjny miernik poziomu dźwięku RFT 00 0017
LITERATURA
[1] http://www.pneumatyka.info.pl/media/gfx/14.jpg
[2] http://www.ontariocompressor.com/images/saver11.gif
[3] http://pl.wikipedia.org/wiki/Plik:Axial_compressor.gif
[4],[5] elektroniczny katalog produktów 2010 firmy festo
[6] http://www.atmo.com.pl/public/pfiles/74/TBC26KK2.jpg
[7],[8] katalog 2010 firmy tubes international
[9]http://instalatorka.pl/image_func.php
[10] http://www.ferro.pl/foto/1/c/KP1.jpg
[11] http://www.sklepecoheat.pl/galerie/u/uchwyt-zamkniety-pp-do-r_49524_m.jpg
[12] http://www.uesystems.com/media/17060/up2000-kit-w-bkgd.jpg
[13]
http://t3.gstatic.com/images
[14] http://emarket.ua/objavlenie/shumomer
[15] http://pl.wikipedia.org/wiki/Lepko%C5%9B%C4%87
[16] http://pl.wikipedia.org/wiki/Piana_%28chemia%29
[17] Duckworth R.A., Mechanika płynów, WNT, Warszawa 1983, 19–26
[18] Pluta J., Stojek J., Napędy i sterowanie hydrauliczne, Skrypt AGH, Kraków 2001.
[19] PN–73/M–73020 Elementy i zespoły hydrauliczne i pneumatyczne. Podział i oznaczenia.
[20] PN–74/M–73702 Napędy i sterowania pneumatyczne - Elementy sterujące (zawory)-Podział i oznaczenie.
[21] PN–91/M–73001 Napędy i sterowania hydrauliczne i pneumatyczne -- Terminologia
[22] Szenajch W., Przyrządy i uchwyty pneumatyczne, WNT, Warszawa 1975, 43–164.
[23] http://pl.wikipedia.org/wiki/Spr%C4%99%C5%BCarka
Opracowanie na podstawie Pracy Dyplomowej:
PASZKOWSKI. P, Zastosowanie metod wibroakustycznych do diagnozowania układów
pneumatycznych, Politechnika Poznańska, WBMiZ 2011, (promotor dr inż. Roman Barczewski)
Udostępnione za zgodą autora
Wyszukiwarka
Podobne podstrony:
koszykarz plecionkarz 742[02] z1 01 n
monter sieci i urzadzen telekomunikacyjnych 725[02] o1 01 n
obuwnik 744[02] z2 01 n
obuwnik 744[02] o1 01 u
obuwnik 744[02] o1 01 n
ciesla 712[02] z2 01 n
operator maszyn lesnych 833[02] z4 01 n
obuwnik 744[02] z5 01 n
kusnierz 743[02] o1 01 u
gornik eksploatacji podziemnej 711[02] z1 01 n
kominiarz 714[02] z2 01 n
monter sieci i urzadzen telekomunikacyjnych 725[02] z1 01 n
kucharz 512[02] z3 01 u
G2 PB 02 B Rys 2 01
piekarz 741[02] z3 01 n
gornik eksploatacji podziemnej 711[02] o2 01 n
02 materiały wykład II
introligator 734[02] z2 01 u
więcej podobnych podstron