3.Rezonans- reaktancja indukcyjna i pojemnościowa skompensują się wzajemnie. Oznacza to, że między
napięciem zasilającym a prądem w obwodzie nie będzie przesunięcia fazowego – będzie się zachowywał tak
jak gdyby miał tylko rezystancję.
Rezonans napięć - rezonans w obwodzie szeregowym R,L,C, występuje w obwodzie prądu sinusoidalnego,
złożonego z elementów R, L, C, napięcia na cewce i kondensatorze są równe, lecz mają przeciwne zwroty,
czyli: Ul+Uc=0
Rezonans prądów może wystąpić w równoległym połączeniu elementów R,L,C, czyli Il+Ic=0, a zgodnie z II
prawem Kirhchoffa: I=Ir+Ic+Il więc I=Ir
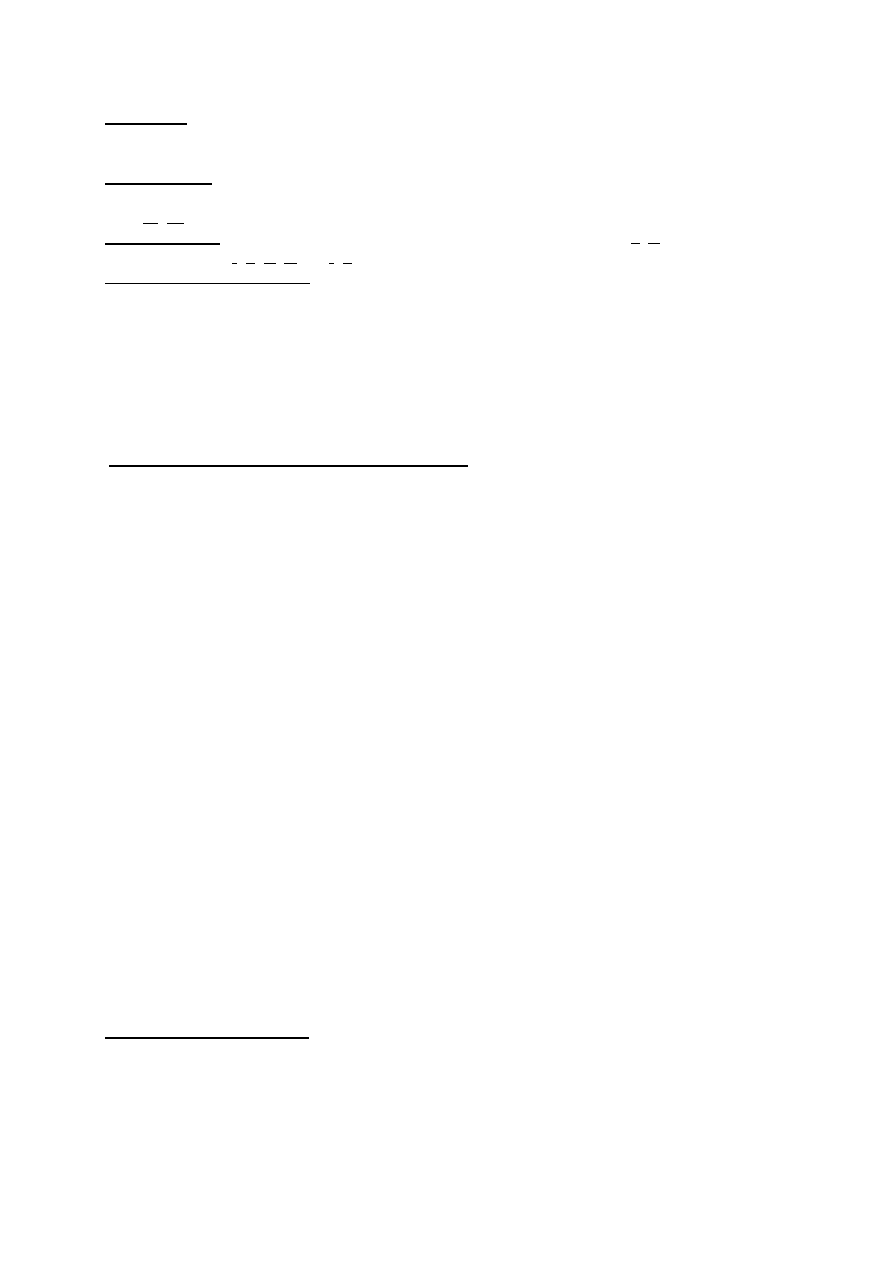
4.Poprawa współczynnika mocy
Mały współczynnik mocy nie pozwala generatorowi wytworzyć mocy czynnej o wartości zbliżonej do jego
mocy znamionowej; ponadto powoduje zwiększenie strat energii elektrycznej
Naturalnym sposobem poprawy mocy jest właściwy dobór mocy silników asynchronicznych uwzględniający
zapotrzebowana moc oraz wyłączenie silników spawarek transformatorów itp. urządzeń pracujących na
biegu jałowym.
Sztuczne środki: polegają na kompensacji mocy biernej indukcyjnej przez równoległe włączani do
odbiorników o charakterze indukcyjnym urządzenia pobierającego moc bierną pojemnościową. Takim
urządzeniem jest kondensator lub przez wzbudzona maszyna synchroniczna (kompresor synchroniczny).
5. Obwody elektryczne trójfazowe prądu sinusoidalnego
Obwód trójfazowy zawiera 3 sprzężone źródła napięcia sinusoidalnego, mające tę samą częstotliwość,
których przebiegi czasowe są przesunięte względem siebie w fazie o kąt 120˚
Napięcie trójfazowe wytwarza się w prądnicach trójfazowych. Prądnica taka działa w ten sposób, że stały
strumień magnetyczny wytwarzany przez elektromagnes, zwany magneśnicą, wiruje ze stałą prędkością
kątową ω wskutek działania pochodzącego z zewnątrz momentu obrotowego. Magneśnica jest zasilana z
zewnątrz, poprzez szczotki i pierścienie na wale prądnicy trójfazowej, z małej niezależnej prądnicy prądu
stałego, zwanej wzbudnicą. W żłobkach strojenia prądnicy trójfazowej są umieszczone trzy uzwojenia,
przesunięte względem siebie o kąt 120˚.
Układ trójfazowy nieskojarzony: jeżeli 3 uzwojenia prądnicy wykorzysta się jako niezależne źródła
napięcia (niestosowane bo za duża liczba obwodów do podłączenia)
Układy skojarzone otrzymuje się przez połączenie odpowiednich początków lub zakończeń uzwojeń
prądnicy, dzieli się na gwiazdowe i trójkątowe.
Układ trójfazowy połączony w gwiazdę - końce faz prądnicy lub odbiornika połączone razem. Wspólny
węzeł faz zarówno prądnicy jak i odbiornika nazywa się punktem neutralnym. Jeżeli punkty neutralne
prądnicy i odbiornika nie są połączone to mamy układ trójfazowy gwiazdowy trójprzewodowy a jeżeli są
połączone przewodem to jest trójfazowy gwiazdowy czteroprzewodowy
Układ w trójkąt - koniec jednej fazy prądnicy lub odbiornika, będzie połączony z początkiem drugiego i tak
dalej
Moc czynna wytwarzana przez trójfazowe źródło napięcia lub pobierana przez odbiornik trójfazowy jest
równa sumie mocy poszczególnych faz. P=Pa+Pb+PC= UaIbcosφa + UbIbcosφb + UcIccosφc
Wzór na moc czynną układów trójfazowych symetrycznych, taki sam dla obu połączeń
U- napięcie między fazowe; I- prąd liniowy; φ- kąt przesunięcia fazowego między napięciem a prądem.
Na tabliczkach znamionowych silników podana jest zwykle moc użyteczna czyli iloczyn mocy i sprawności
Moc bierna: wytwarzana przez trójfazowe źródło napięcia lub pobierana przez odbiornik trójfazowy jest
równa sumie mocy biernych poszczególnych faz Q=Qa+Qb+Qc=
Moc pozorna: S=sqrt(P^2+Q^2)=3UfIf=sqrt(3)UI
8. Mierniki magnetoelektryczne
Do ich działania wykorzystuje się siłę działającą na umieszczony w polu magnetycznym przewód, w którym
płynie prąd elektryczny. Budowę przyrządu magnetoelektrycznego przedstawia rysunek. Część nieruchomą
przyrządu stanowi magnes trwały, między którego nabiegunnikami umieszczony jest walec wykonany z
materiału ferromagnetycznego miękkiego. Kształt nabiegunników i usytuowanie walca są takie, że dwie
szczeliny powietrza między nimi mają jednakową szerokość, co zapewnia stałą wartość indukcji
magnetycznej B w obu szczelinach.. W szczelinach umieszczone są dwa boki cewki osadzonej na osi, do
której przymocowana jest wskazówka. Moment zwracający wytwarzają dwie spirale sprężynki, które
umożliwiają także doprowadzenie prądu do ruchomej cewki. Jeżeli przez uzwojenie cewki płynie prąd I, to
na każdy bok cewki znajdujący się w szczelinie miedzy nabiegunnikiem a walcem z materiału
ferromagnetycznego działa siła ( wg wzoru): F = z B I l gdzie: z – liczba zwojów cewki B – indukcja
magnetyczna w szczelinie praktycznie równomierna wzdłuż całego nabiegunnika, I – długość boku cewki
znajdującego się w polu magnetycznym.
AMPEROMIERZE: Cewki mierników magnetoelektrycznych ze względu na wymaganą lekkość
wykonywane są z cienkiego drut, umożliwiającego przepływ małego prądu. Miernikiem
magnetoelektrycznym można, więc mierzyć bezpośrednio prąd o wartości nieprzekraczającej wartości
dopuszczalnej prądu do uzwojenia jego cewki. Amperomierze wyskalowane w mikroamperach nazywane są
odpowiednio mikroamperomierzami i miliamperomierzami. Amperomierze o czułości mniejszej od
jednego mikroampera nazywane są galwanometrami.
OMOMIERZE – miernik do pomiaru rezystancji, w takim omomierzu szeregowo z ustrojem
magnetoelektrycznym włączone jest źródło napięcia stałego E rezystor dodatkowy RS oraz rezystancja
mierzona Rx
WOLTOMIERZE: Jeżeli szeregowo z ustrojem miernika magnetoelektrycznego zostanie włączony opornik
szeregowy R
d
, to prąd płynący przez ustrój I =U/Ru+Rd Podziałka takiego miernika jest równomierna i
może być wyskalowana bezpośrednio w jednostkach napięcia. Przy pomiarze napięć w o wartościach
większych od zakresu woltomierza magnetoelektrycznego zakres woltomierza rozszerza się przez włączenie
szeregowane z woltomierzem mającym rezystancję Ru rezystora R
d
. Dla n- krotnego rozszerzenia zakresu
woltomierza n=U`/U=I(R
v
+R
p
)/IR
v
11. Mierniki elektromagnetyczne
Istnieją dwa rozwiązania konstrukcyjne mierników elektromagnetycznych- mierniki jednordzeniowe oraz
mierniki dwurdzeniowe.
W mierniku jednordzeniowym rdzeń z materiału ferromagnetycznego w postaci blaszki, mającej specjalnie
wyprofilowany kształt, przytwierdzonej do osi, jest wyciągany do wnętrza cewki, jeżeli płynie przez nią prąd
elektryczny. Powoduje to odchylenie organu ruchomego.
W mierniku dwurdzeniowym wewnątrz cewki cylindrycznej znajdują się dwie blaszki ( rdzenie) z materiału
ferromagnetycznego – nieruchoma i ruchom połączona z osią, a na której osadzona jest wskazówka. Pod
wpływem pola magnetycznego wytworzonego przez prąd płynący w cewce obie blaszki magnesują się
jednoimienne i odpychają z siłą zależną od pola magnetycznego cewki. Powstający w ten sposób moment
napędowy jest funkcją kwadratu prądu cewki. Ponieważ i
2
ma wartość zawsze dodatnią, niezależnie od
zwrotu prądu, wiec przyrząd elektromagnetyczny może mierzyć zarówno prąd stały, jak i przemienny.
Wychylenie wskazówki przyrządu określa zależność: α = k f(i
2
).
Mierniki elektromagnetyczne są stosowane do pomiaru napięć, których wartości zawarte są w przedziale od
kilku do kilkuset woltów, i prądów o wartości od kilkudziesięciu mikroamperów do kilkudziesięciu
amperów.
12. Pomiar rezystancji metoda techniczna i mostkową:
Metoda techniczna pomiaru rezystancji polega na włączaniu rezystancji do źródła napięcia stałego oraz na
pomiarze prądu płynącego przez tą rezystancje za pomocą amperomierza i pomiarze napięcia na zaciskach
rezystora za pomocą woltomierza. Wyniki tych pomiarów umożliwiają obliczenie wartości rezystancji za
pomocą prawa Ohma.
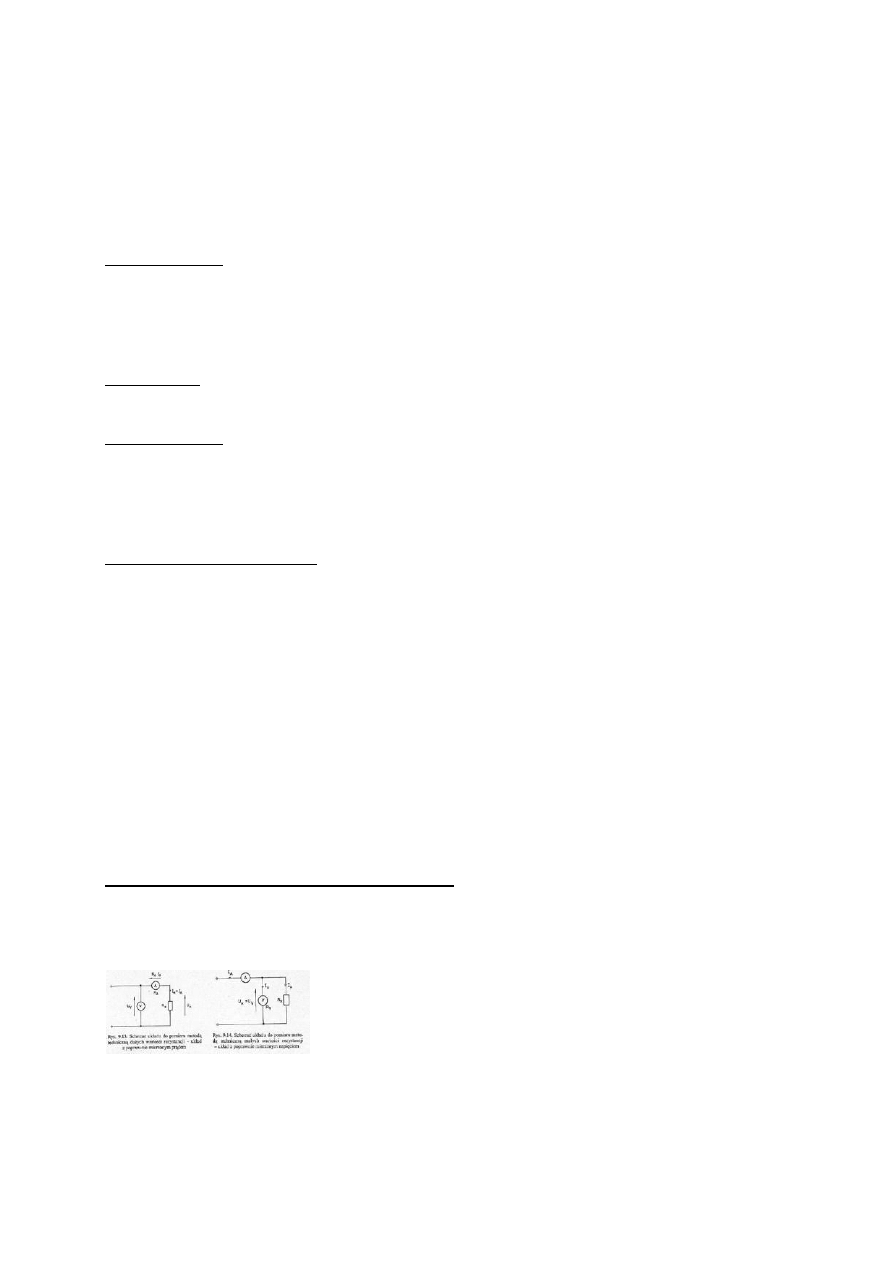
Metoda mostkowa-
Należy do dokładnych metod pomiaru rezystancji. Rezystor R1 – ma mierzona
Rezystancje i 3 rezystory wzorcowe gdzie R2 nastawny- dekadowy. Przekątna BD czworoboku jest gałąź
zawierająca galwanometr i rezystor R. W przekątnej AC włączona jest bateria akumulatorów, jako źródło
zasilające Mostek Wheatstone’a znajduje się w równowadze, gdy przez gałąź BD nie płynie prąd na tej gałęzi
znajduje się galwanometr
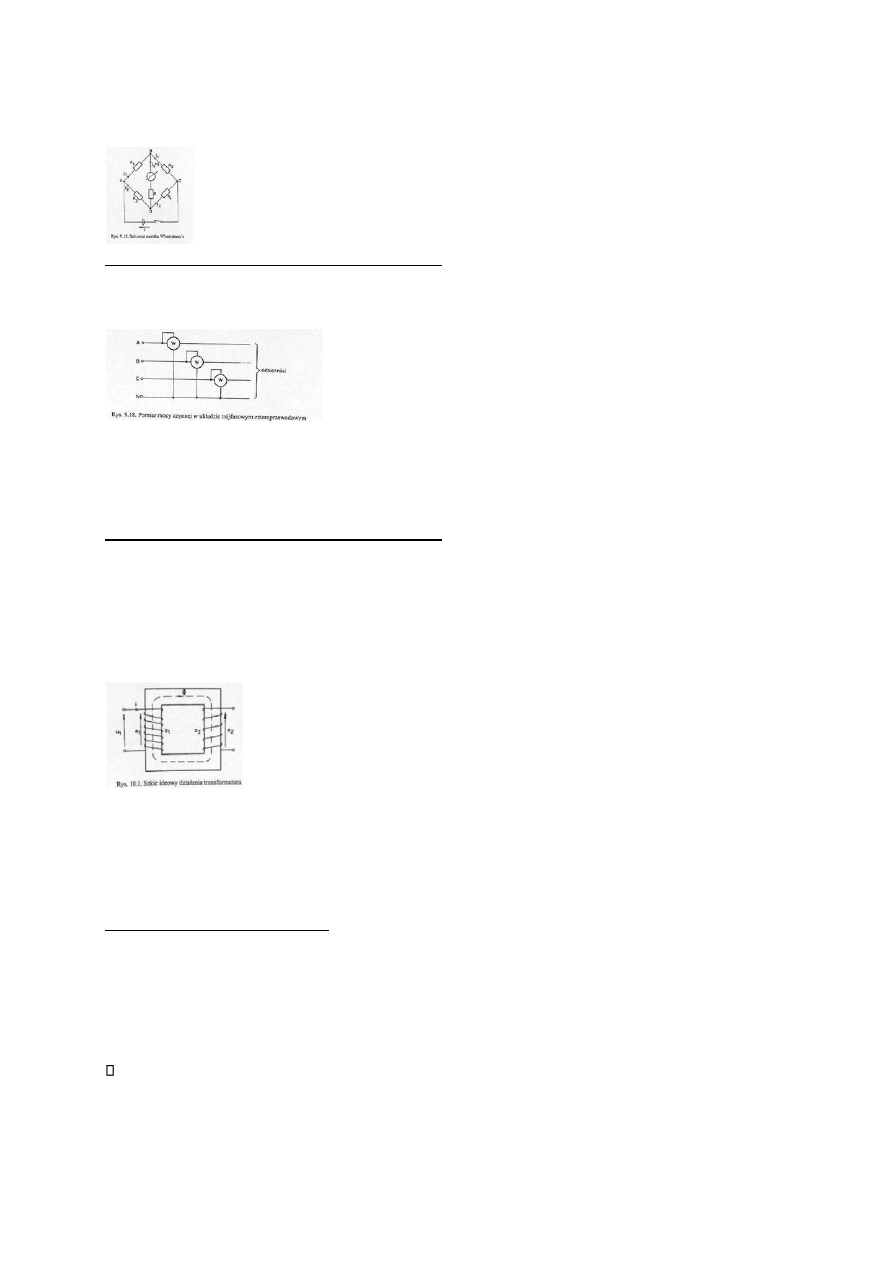
13. Pomiary mocy i energii w układach trójfazowych
Do pomiaru mocy czynnej w układzie trójfazowym czteroprzewodowym używa się 3 watomierzy
włączonych miedzy poszczególne przewody fazowe a przewód neutralny. Każdy z tych trzech watomierzy
mierzy moc jednej fazy. Moc czynna pobierana przez odbiorniki jest równa sumie mocy poszczególnych faz
.
W przypadku układu trójfazowego symetrycznego do pomiaru mocy czynnej wystarczy jeden watomierz
gdyż moce czynne poszczególnych faz są jednakowe. W tym przypadku moc czynna określa się mnożąc
wskazania tego watomierza przez 3. W układach trójfazowych trójprzewodowych wystarcza 2 watomierze
reszta jest jak wyżej.
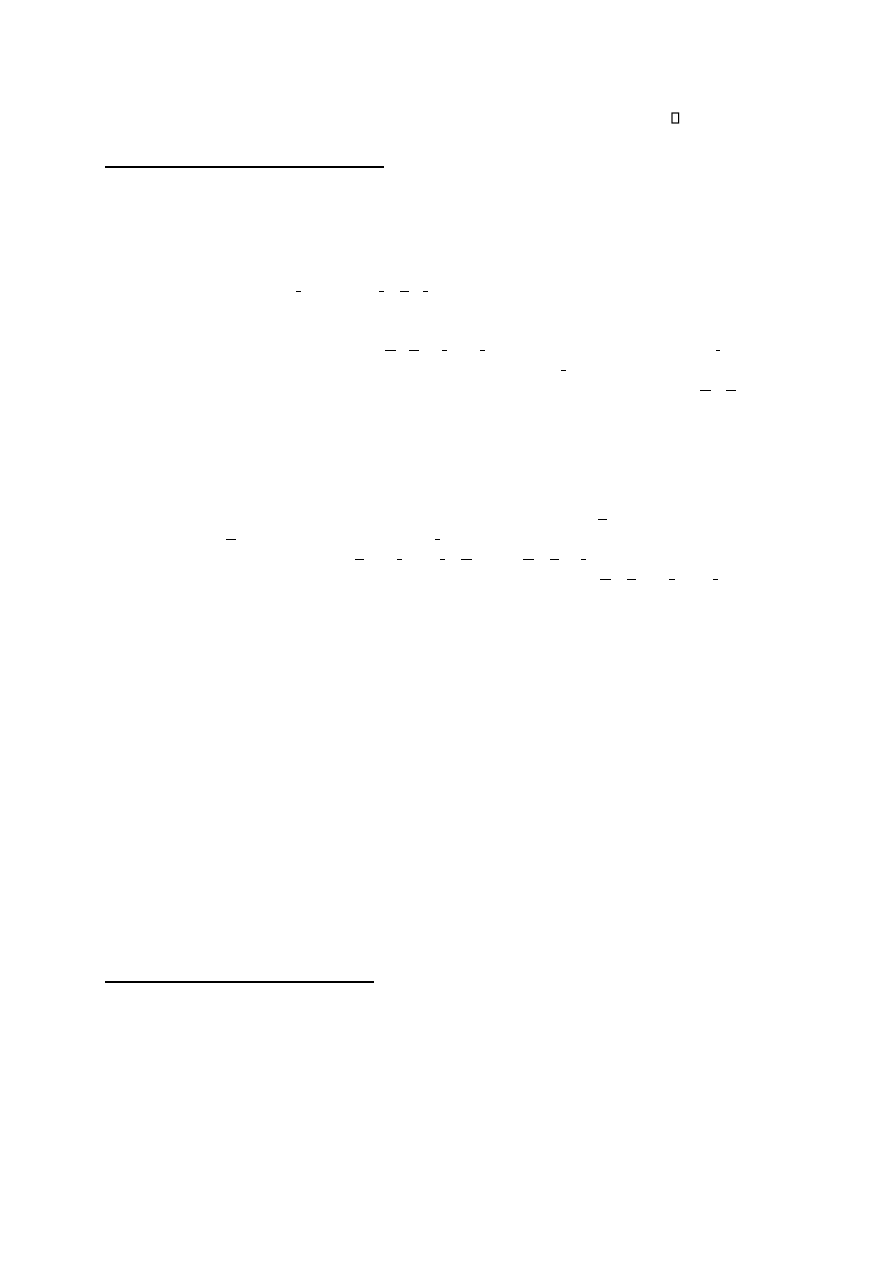
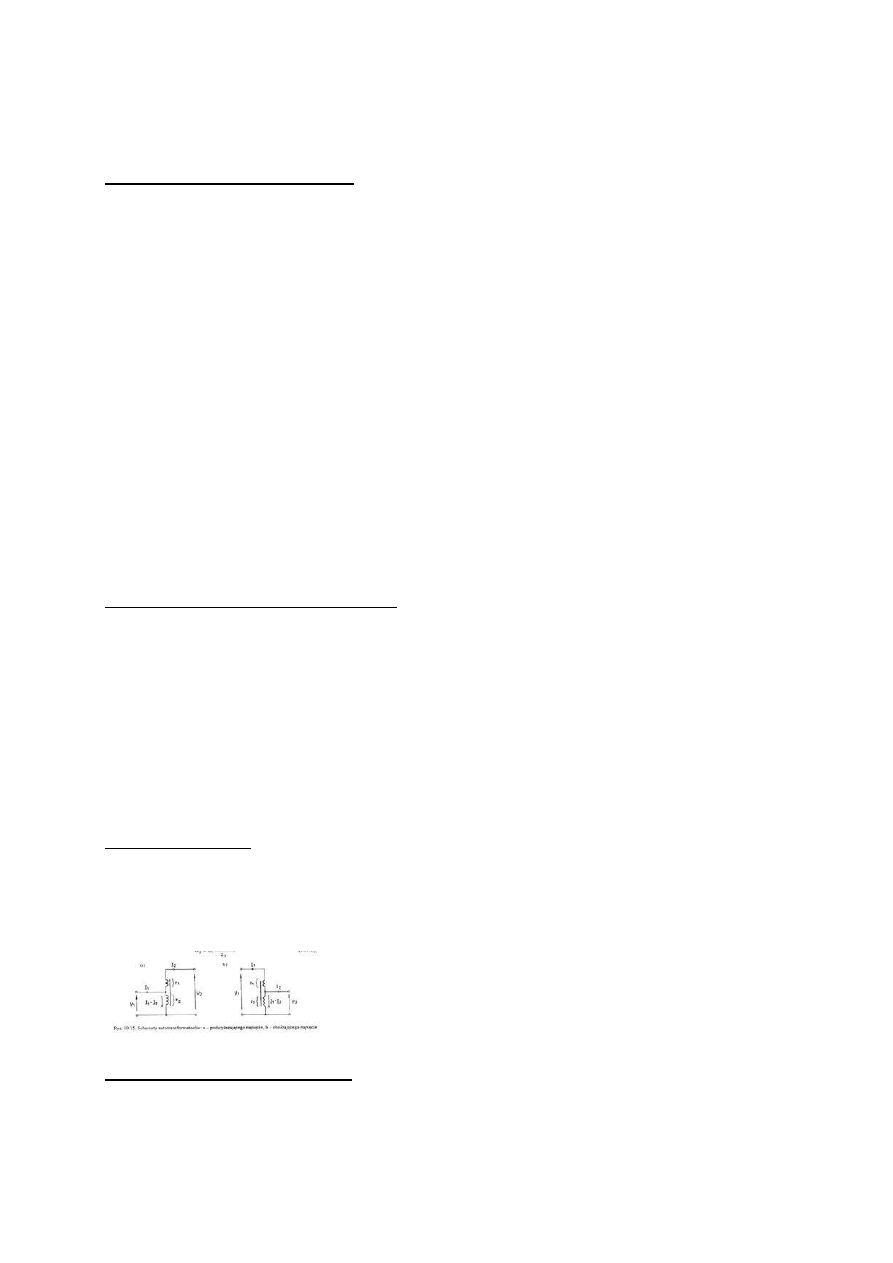
14. Zasada działania transformatora jednofazowego.
Transformator jest statycznym urządzeniem elektrycznym, w którym następuje przekazywanie energii
elektrycznej z jednego obwodu do drugiego za pośrednictwem pola magnetycznego. Transformator jest
zbudowany z uzwojeń sprzężonych magnetycznie. Transformator składa się z rdzenia, w którym zamyka się
strumień magnetyczny oraz umieszczonych na nim uzwojeń. Ze względu na liczbę uzwojeń rozróżnia się
transformatory: dwuuzwojeniowe, wielouzwojeniowe oraz jednouzwojeniowe (autotransformatory).
Uzwojenie, do którego doprowadza się energię, nazywa się uzwojeniem pierwotnym, a uzwojenie, z którego
odprowadza się energie nazywa się wtórnym.
Na rdzeń z materiału ferromagnetycznego stanowiący zamkniętą drogę dla strumienia magnetycznego
nawinięte są dwa uzwojenia odizolowane od siebie oraz od rdzenia. Uzwojenie pierwotne, mające z1
zwojów, dołączone jest do źródła prądu sinusoidalnego, U1, który płynąc przez te zwoje wywołuje
sinusoidalny strumień magnetyczny w rdzeniu transformatora. Uzwojnienie drugie wtórne ma Z2 zwojów. W
uzwojeniach pierwotnym z1 i wtórnym z2 zmiany strumienia magnetycznego sprzęgającego oba uzwojenia
indukują siły elektromotoryczne o wartościach: e1= Z1d(ϕ)/dt e2= Z2d(ϕ)/dt.
15. Straty mocy w transformatorze
Straty mocy czynnej związane z przenoszeniem energii elektrycznej przez transformator można w
przybliżeniu ograniczyć do strat mocy w rdzeniu oraz do strat mocy w uzwojeniach a) Straty mocy w
rdzeniu:
∆PFe=∆Ph+∆Pw gdzie (k- współczynnik proporcjonalności, B-indukcja magnetyczna, f- częstotliwość)
straty wywołane przez sinusoidalnie zmienny strumień płynący w rdzeniu który powoduje cykliczne
przemagnesowanie materiału ferromagnetycznego rdzenia. Związane są z tym straty histerezowe.
związane z indukowaniem się i przepływem prądów wirowych. Celem ograniczenia tych strat rdzenie
transformatorów wykonuje się z cienkich blach pokrytych lakierem elektroizolacyjnym lub przedzielonych
cienka warstwo izolacji elektrycznej.
b)Straty mocy w uzwojeniach transformatora: związane z przepływem prądu I1 przez uzwojenie o
rezystancji R1 oraz prądu I2 przez uzw. o rez. R2. wg prawa Joule’a Lenza
16.Podstawowe stany pracy transformatora
Stan jałowy
Stanem jałowym transformatora jest stan, w którym uzwojenie pierwotne połączone jest ze źródłem napięcia
sinusoidalnego, a uzwojenie wtórne jest otwarte. Prąd płynący przez uzwojenie pierwotne nazywa się wtedy
prądem stanu jałowego I0. Występujące straty mocy czynnej spowodowanej histerezą i prądami wirowymi
można przedstawić jako: ΔPFe=E1Ihw stąd Ihw= ΔPFe/E1.
Całkowity prąd stanu jałowego I0 jest równy I0= I
μ
+Ihw. Strumienie rozproszenia są proporcjonalne do
prądów, które je wzbudzają. Są z tymi prądami w fazie, tak jak w idealnej cewce powietrznej. Oddziaływanie
ich można przedstawić po stronie pierwotnej cewek indukcyjnych o reaktancjach X1 i X2. Napięcie
zasilające jest zgodne z II prawem Kirhchoffa U
1
=E
1
+RI
0
+jX
1
I
0
. Prąd stanu jałowego transformatora I
0
jest
kilkanaście razy mniejszy od prądu znamionowego uzwojenia pierwotnego Iln, tak, ze spadki napięcia i na
rezystancji i reaktancji indukcyjnej uzwojenia pierwotne są znikomo małe. Więc przyjmuje się, że U1=E1.
Przekładnie transformatora jest równa stosunkowi napięcia zasilającego uzwojenie pierwotne do napięcia na
zaciskach wtórnego w stanie jałowym υ=E1/E2=U1/U2.
Transformator w stanie jałowym nie oddaje mocy. Pobrana ze źródła moc przeznaczona jest prawie w całości
na pokrycie strat magnetycznych w rdzeniu.
Stan obciążenia
Jeśli do zacisków uzwojenia wtórnego zostanie włączony odbiornik o impedancji Zodb to pod wpływem siły
elektromotorycznej E
2
w obwodzie tym popłynie prąd I
2
. Dla obwodu tego zgodnie z drugim prawem
Kirchhoffa można napisać bilans napięć: E2=R2I2+jXzI2+U2, gdzie U2=ZodbI2 jest napięciem na zaciskach
odbiornika. Natomiast dla obwodu pierwotnego analogiczne równanie ma postać: U1=E1+R1I1+jX1I1.
Równaniom tym odpowiadają 2 niezależne obwody elektryczne.
Analizę pracy transformatora najlepiej przeprowadza się wykorzystując wykres wektorowy prądów i napięć
występujących w transformatorze przy dowolnym obciążeniu włączonym do zacisku uzwojenia wtórnego.
Schemat zastępczy umożliwia skonstruowanie wykresu wektorowego napięć i prądów w transformatorze
przy dowolnym obciążeniu włączonym do zacisków uzwojenia wtórnego. Jeśli transformator jest zasilany
napięciem o stałej wartości skutecznej, a zmienia się impedancja odbiornika, wówczas zmianie ulega
napięcie na zaciskach uzwojenia wtórnego Zależność napięcia na zaciskach uzwojenia wtórnego od prądu
obciążenia
I2 dla odbiorników mających różny współczynnik mocy.
Stan zwarcia Stan zwarcia jest takim stanem transformatora, w którym zaciski wtórne są zwarte, a uzwojenie
pierwotne jest zasilane napięciem. W praktyce stan zwarcia jest stanem awaryjnym. Rezystancje uzwojeń Rl,
R2 oraz ich reaktancje rozproszeniowe X
1
, X
2
są tak małe, że po zasileniu uzwojenia pierwotnego napięciem
znamionowym w uzwojeniach płynęłyby bardzo duże prądy. W wyniku zamiany energii elektrycznej na
ciepło w uzwojeniach, w bardzo krótkim czasie nastąpiłoby przegrzanie izolacji uzwojeń i zniszczenie
transformatora.
Parametrem charakteryzującym dany transformator jest tzw. znamionowe napięcie zwarcia. Jest to wartość
napięcia zasilającego uzwojenie pierwotne transformatora, gdy przy zwartych zaciskach uzwojenia w
uzwojeniu pierwotnym płynie prąd równy prądowi znamionowemu Iln czyli Uz=ZzIln gdzie Zz- impedencja
zwarcia transformatora.
17. Budowa transformatora trójfazowego.
Rdzeń transformatora trójfazowego składa się z 3 kolumn połączonych na obu końcach jarzmami. Uzwojenia
pierwotne i wtórne poszczególnych faz umieszczone są na kolumnach rdzenia. Jeżeli uzwojenia pierwotne
zostaną przyłączone do symetrycznej trójfazowej sieci zasilającej, to w uzwojeniach tych popłyną prądy,
które wytworzą w kolumnach rdzenia strumienie magnetyczne, proporcjonalne do wartości prądów.
Ponieważ w dowolnej chwili suma trzech wartości chwilowych prądów w układzie trójfazowym
symetrycznym jest równa zeru, więc również suma wartości chwilowych trzech strumieni poszczególnych
kolumn, dopływających do jarzma jest równa zeru. Uzwojenia pierwotne i wtórne transformatora mogą być
łączone w gwiazdę, w trójkąt, lub w zygzak - tylko uzwojenie dolnego napięcia.
Wynikiem różnych połączeni transformatorów trójfazowych jest występowanie przesunięć fazowych między
napięciami pierwotnymi a wtórnymi. Można użyć 3 transformatorów jednofazowych do dużych mocy lub
jeden trójfazowy.
18. Praca równoległa transformatorów
Do transformowania energii elektrycznej zamiast 1 transformatora o mocy dobranej do obciążenia
szczytowego stosuje się 2 transformatory mniejsze połączone równolegle. W warunkach zmiennego
obciążenia układ taki stwarza możliwość zmniejszenia strat energii związanej z jej transformacją. Przy
obciążeniu szczytowym pracują 2 transformatory. W dolinie obciążenia wyłącza się jeden z transformatorów
a zostawia włączony ten, dla którego aktualne obciążenie zbliżone jest do optymalnego.
Należy podkreślić, że układ transformatorów współpracujących równolegle zwiększa pewność zasilania
energią elektryczną; jeśli przyjąć, że jeden ze współpracujących transformatorów uszkodzi się, drugi może
nadal zasilać sieć rozdzielczą.
Aby współpraca transformatorów była optymalna, tak pod względem technicznym jak i ekonomicznym,
transformatory pracujące równolegle muszą mieć:
-Warunek pierwszy - jednakowych grup połączeń - wynika z koniecznej zgodności w fazie sił
elektromotorycznych odpowiadających sobie faz transformatorów przeznaczonych do pracy równoległej. -
Warunek drugi - jednakowe przekładnie - wynika z koniecznej równości sił elektromotorycznych
indukowanych w uzwojeniach dolnego napięcia. Przy niejednakowych przekładniach te siły
elektromotoryczne nie są równe
-Warunek trzeci -jednakowe napięcia zwarcia - wynika z faktu, że transformatory współpracujące równolegle
obciążają się odwrotnie proporcjonalnie do ich napięć zwarcia, tzn. transformator mający mniejsze napięcie
zwarcia przyjmuje na siebie większe obciążenie.
- Warunek czwarty - stosunek mocy znamionowych współpracujących równolegle transformatorów nie
większy od 3 - związany jest z sumowaniem się prądów oddawanych przez transformatory.
19. Budowa transformatorów energetycznych
W czasie pracy transformatora energetycznego w rdzeniu i w uzwojeniach wydziela się dużo ciepła,. dlatego
trzeba go chłodzić, aby nie zniszczyć izolacje uzwojeń. Zazwyczaj transformatory energetyczne są chłodzone
mineralnym olejem izolacyjnym, ale mogą też być chłodzone powietrzem.
W transformatorze energetycznym uzwojenia są umieszczone na kolumnach rdzenia, których przekrój
zbliżony jest do koła. Uzwojenia mogą być wykonywane jako walcowe (cylindryczne) bądź krążkowe. Przy
uzwojeniach cylindrycznych bliżej rdzenia umieszcza Się uzwojenie dolnego napięcia. Natomiast przy
uzwojeniu krążkowym krążki cewek będące częściami uzwojeń dolnego i górnego napięcia są ułożone na
przemian i przedzielone przegrodami z materiału elektroizolacyjnego!!!
W celu ułatwienia odprowadzania ciepła z transformatora do otoczenia ścianki kadzi transformatora
wykonuje się z blachy falistej lub mocuje się radiatory rurowe, umożliwiające grawitacyjną (lub wymuszoną
przez specjalną pompę) cyrkulację oleju.
20. Autotransformator
Wynikiem zastosowania w transformatorze dwóch oddzielnych uzwojeń – pierwotnego i wtórnego – jest
elektryczne odizolowanie od siebie obwodów- pierwotnego i wtórnego. Jeśli takie odizolowanie nie jest
wymagane, można zbudować transformator mający jedno uzwojenie, którego część jest wspólna dla
obwodów pierwotnego i wtórnego. Taki transformator nazywamy autotransformatorem. W części wspólnej
uzwojenia autotransformatora (z
2
) przy obciążeniu płynie prąd o wartości I
1
-I
2.
21. Przekładniki napięciowe i prądowe
W pomiarach wielkości elektrycznych w obwodach prądu przemiennego, w których występuje wysokie
napięcie lub duży prąd bądź względy bezpieczeństwa wymagają aby miernik był odizolowany od obwodu w
którym występuje wysokie napięcie powszechnie stosuje się transformatory małej mocy zwane
przekładnikami przekładniki umożliwiają pomiar napięcia prądu mocy i energii elektrycznej przyrządami o
niewielkich zakresach pomiarowych i o stosunkowo nieskomplikowanej budowie. W zależności od
przeznaczenia przekładniki dzielimy na prądowe- wykorzystywane w pomiarach prądu i napięciowe
przekładniki – wykorzystywane w pomiarach napięcia. Przekładniki prądowe są to jednofazowymi
transformatorami małej mocy, zasilanymi po stronie pierwotnej wysokim napieciem którego wartości jest
mierzona.
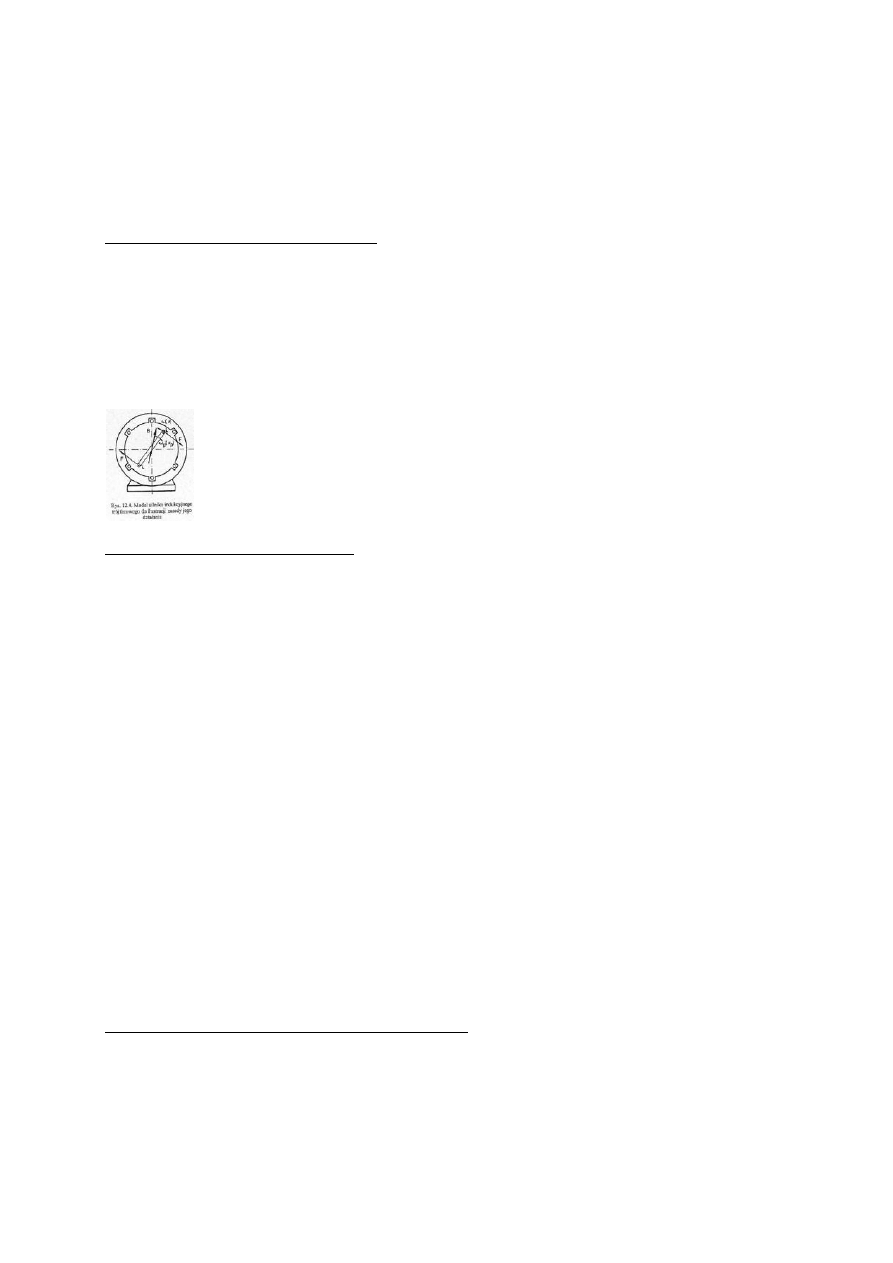
22. Zasada działania silnika indukcyjnego.
Zasadę tą można przedstawić na uproszczonym modelu silnika, złożonym ze stojana, w którym układ cewek
zasilany z sieci trójfazowej wytwarza pole magnetyczne wirujące, i wirnik, którym jest przymocowana do
ułożyskowanej osi ruchomej cewka mająca uzwojenie zwarte. Gdy pole magnetyczne wirujące z prędkością
kątową ωp zbliża się z prędkością liniową vp do początkowo nieruchomej ramki, wskutek zmiany tego pola
magnetycznego w prętach ramki równoległych do osi obrotu indukują się siły elektromotoryczne. Kierunek i
zwrot siły F można wyznaczyć z reguły lewej dłoni e = Blv gdzie B – wart. indukcji magnetycznej
l – dł. pręta
v – względna prędkość pręta ramki
23 Analiza pracy silnika indukcyjnego.
a) stan jałowy silnika pierścieniowego przy otwartym obwodzie wirnika
Po włączeniu uzwojeń stojana do sieci zasilającej powstaje w nim wirujące pole magnetyczne ten strumień
magnetyczny napotyka na swojej drodze szczeliny powietrzne miedzy rdzeniem stojana a rdzeniem wirnika.
Szczeliny te stanowią duży opór magnetyczny w porównaniu z oporem magnetycznym rdzeni wykonanych z
materiałów ferromagnetycznych. Dlatego prąd magnesujący potrzebny do wytworzenia w silniku
indukcyjnym magnetycznego strumienia wirującego jest relatywnie znacznie większy niż w transformatorze.
Wirnik pierścieniowy silnika pozostaje nieruchomy ponieważ uzwojenia nie tworzą obwodu zamkniętego.
Uzwojenie faz stojana silnika indukcyjnego są wykonane tak, że rozkład indukcji magnetycznej wzdłuż
obwodu szczeliny między stojanem a wirnikiem jest w przybliżeniu sinusoidalny, więc w uzwojeniach
stojana i wirnika indukują się sinusoidalne zmienne siły elektromotoryczne. b) Praca silnika indukcyjnego
Po zamknięciu obwodu wirnika, np. przez bezpośrednie połączenie (zwarcie) zacisków uzwojenia wirnika na
tabliczce zaciskowej, siła elektromotoryczna indukowana w wirniku wywołuje w zamkniętym obwodzie
wirnika prąd, który wytwarza elektromagnetyczny moment napędowy. Jeżeli wartość tego momentu jest
większa od momentu obciążenia, to wirnik zaczyna się obracać, a jego prędkość wzrasta do wartości, przy
której moment elektromagnetyczny jest równy momentowi obciążenia. Wraz ze wzrostem prędkości
obrotowej wirnika maleje względna prędkość obrotowa pola i wirnika. Jednocześnie pulsacja i częstotliwość
siły elektromotorycznej indukowanej w wirniku maleją.
Prądy, które płyną w uzwojeniach stojana i wirnika, wywołują oprócz strumienia głównego również
strumienie rozproszenia, skojarzone z uzwojeniami, które je wytworzyły, powodują powstanie w
uzwojeniach indukcyjnych spadków napięcia na indukcyjnościach rozproszeniowych L1 i L2.
Uzwojenie stojana i wirnika nie są połączone elektrycznie, lecz sprzężone magnetycznie, jak uzwojenie
pierwotne i wtórne w transformatorze.
24. Charakterystyki mechaniczne silników indukcyjnych
Moc mechaniczna wytwarzana przez 1 fazę silnika przy poślizgu s jest równa mocy wydzielonej na
rezystorze
Dla silnika trójfazowego, moc całkowita jest 3 razy większa, czyli zgodnie z prawem Joule'a-Lenza Wzór ten
pozwala wyznaczyć na podstawie zmierzonych parametrów silnika indukcyjnego zależności momentu
elektromagnetycznego M silnika od poślizgu s, albo po skorzystania z wzoru s=np-n/np, zależność momentu
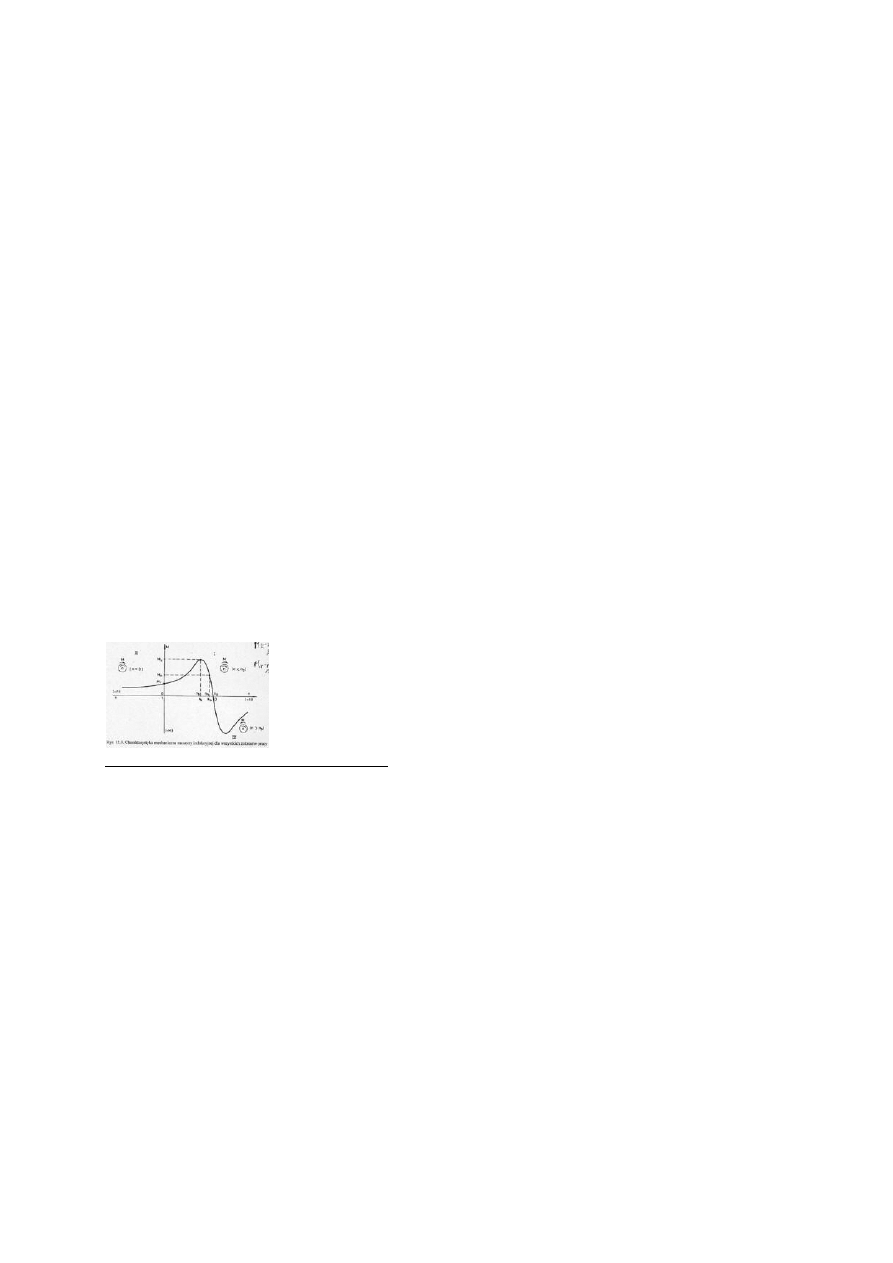
elektromagnetycznego silnika od jego prędkości obrotowej n. Ta ostatnia zależność nazywa się
charakterystyką mechaniczną silnika. Typowy przebieg charakterystyki mechanicznej silnika indukcyjnego,
którego uzwojenia są zwarte, przedstawiono na poniższym wykresie. Wykres przechodzi przez 3 ćwiartki:
I,II,IV. Ćwiartki:
I-zakres pracy silnikowej. Moment elektromagnetyczny jest zgodny ze zwrotem wirowania wirnika, jest więc
momentem napędowym. Po włączeniu nieruchomego wirnika do sieci wytwarza on moment rozruchowy.
Pod jego wpływem wirnik silnika zaczyna zwiększać swoją prędkość obrotową. Jednocześnie wzrasta
moment elektromagnetyczny. Jego wartość maksymalna nazywa się momentem krytycznym. Po pewnym
czasie prędkość silnika i sprzęgniętej z nim maszyny napędzanej ustala się na poziomie, przy którym
występuje różność momentu elektromagnetycznego i momentu hamującego(momentu obciążenia) Jeżeli
zamiast obciążyć silnik indukcyjny momentem hamującym, dostarczy się do niego moment mechaniczny, to
silnik zacznie zwiększać swoją prędkość obrotową i w pewnej chwili osiągnie prędkość synchroniczną z
polem magnetycznym wirującym, a następnie ją przekroczy (ćw. IV) Wtedy nastąpi zmiana zwrotu momentu
elektromagnetycznego silnika na przeciwny. Moment wytwarzany przez silnik będzie skierowany przeciwnie
do kierunku wirowania wirnika i stanie się momentem hamującym. - zakres pracy prądnicowej lub
hamowanie odzyskowe
II-wirnik obraca się przeciwnie do kierunku wirowania pola magnetycznego. Zwrot wytwarzanego przez
silnik momentu elektromagnetycznego jest skierowany przeciwnie do zwrotu prędkości wirowania wirnika.
Moment ten jest więc momentem hamującym. Ten rodzaj hamowania nosi nazwę hamowania przeciw
włączeniem/przeciwprądem.
Charakterystyki zakresu pracy silnikowej:
-moment znamionowy oraz prędkość znamionowa i poślizg znamionowy
-moment, prędkość, poślizg krytyczny (oznaczenie k)
-przeciążalność
-moment rozruchowy
Moment znamionowy oblicza się:
25. Metody rozruchu silników indukcyjnych
Rozruch silnika jest procesem przejście wirnika od stanu postoju do stanu pracy ustalonej, w danych
warunkach zasilania i obciążenia. Może on nastąpić tylko wówczas, gdy wytworzony przez silnik w chwili
włączenia moment rozruchowy będzie większy od momentu hamującego. Mr>Mh Następuje gdy moment
rozruchu > moment hamujący. Początkowo moment rozruchowy silników indukcyjnych jest mniejszy od
momentu znamionowego. Czas rozruchu zależy od wartości momentu dynamicznego a także od momentów
wszystkich sprzężonych ze sobą części wirujących silnika o napędzanej maszyny.
Bezpośrednie włączenie do sieci stojana silnika indukcyjnego klatkowego lub pierścieniowego ze zwartymi
uzwojeniami wirnika powoduje, że silnik te pobierają znaczny prąd. Duży prąd pobierany przy rozruchu rzez
silnik indukcyjny z sieci zasilającej powoduje w niej duże spadki napięć, których konsekwencją jest
pogorszenie parametrów energii elektrycznej dostarczonej do wszystkich odbiorników zasilanych tą siecią.
Natomiast w samym silniku przepływ dużego prądu rozruchowego powoduje wyzwolenie się w uzwojeniach
dużej energii w postaci ciepła.
a)uruchamianie silnika indukcyjnego klatkowego jest bezpośrednie włączenie do sieci, stosowane w
przypadku silników do 3kW. W przypadku silników mających moc od 3kW zmniejszenie prądu rozruchu
uzyskuje się przez obniżenie napięcia doprowadzającego do uzwojeń faz silnika w czasie rozruchu. Wiąże się
to oczywiście ze zmniejszeniem momentu rozruchu silnika. Najczęściej są stosowane następujące metody
obniżenia napięcia na zaciskach uzwojeń faz stojana silnika: zastosowanie przełącznika gwiazda-trójkąt;
zastosowanie autotransformatora rozruchowego.

Inny sposób polega na tym ze uzwojenie stojana łączy się z siecią poprzez dodatkowe rezystory albo dławiki
jest stosowany sporadycznie. W zależności od rodzaju zastosowanego autotransformatora napięcie podnosi
się płynie skokowo.
b)Uruchomienie silników indukcyjnych pierścieniowych w silniku indukcyjnym pierścieniowym prąd
rozruchu może być zmniejszony przez włączenie w obwód uzwojenia wirnika dodatkowych rezystorów
tworząc tzw. rozrusznik. Rozrusznik jest układem 3 kilkustopniowych rezystorów zmontowanych we
wspólnej obudowie i połączonych w gwiazdę. Zaciski rozrusznika (gwiazdy) są połączone z uzwojeniami faz
wirnika za pośrednictwem 3 szczotek przylegających do pierścieni wirnika.
Uzwojenie stojana silnika połączone jest w trójkąt uzwojenie wirnika natomiast w układzie gwiazdowym
połączone jest z czterostopniowym rozrusznikiem. Pierwszy stopień wirnika odpowiada największej
rezystancji, a czwarty stopień odpowiada całkowicie wyłączonemu rozrusznikowi. Przełączenie
poszczególnych stopni rozrusznika odbywa się za pomocą specjalnej dźwigni.
Rozrusznik jest przystosowany tylko do rozruchu silnika i długotrwałe obciążenie jego rezystorów może
spowodować ich uszkodzenie.
Przed przystąpieniem do rozruchu silnika, zanim uzwojenia stojana zostaną włączone do sieci zasilającej,
należy sprawdzić czy dźwignia rozrusznika jest cofnięta w swoje pierwotne położenie, odpowiadające
otwartemu obwodowi wirnika. Wtedy włącza się napięcie zasilające stojan. Następnie za pomocą dźwigni
przesuwa się zestyki ruchome rozrusznika. W początkowej fazie rozruchu są włączone wszystkie sekcje
rozrusznika.
26. Regulacja prędkości obrotowej silników indukcyjnych
Z powyższego wzoru wynika, że zmiana prędkości obrotowej silnika może wystąpić w wyniku zmiany:
- częstotliwości f napięcia zasilającego silnik
- liczby p par biegunów
-poślizgu wirnika s
Największe możliwości zmiany prędkości w sposób płynny prędkości obrotowej uzyskuje się przez zmianę f.
Zmiana ta powoduje zmianę wartości prędkości obrotowej pola magnetycznego wirującego.
Regulację prędkości obrotowej przez zmianę liczby par biegunów jest możliwa tylko z zastosowaniem
silników wielobiegowych. Wirniki tych silników są wykonane wyłącznie, jako klatkowe. Zwykle silnikami
tego typu są silniki dwubiegowe, rzadziej trójbiegowe i czterobiegowe.
Regulację prędkości obrotowej przez zmianę poślizgu wirnika można uzyskać, zmieniając wartości napięcia
zasilającego silnik lub włączając w obwód wirnika silnika indukcyjnego pierścieniowego specjalną
rezystancję. Wynika z tego że pierwszy sposób może być stosowany zarówno w silnikach klatkowych jak i
pierścieniowych, a drugi tylko w pierścieniowych.
27. Hamowanie silników indukcyjnych.
W układach napędowych konieczność hamowania zachodzi wtedy, gdy dąży się do: zatrzymania układu
napędowego znajdującego się w ruchu, zmniejszenia jego prędkości obrotowej.
Wyróżnia się sposoby hamowania:
a)
naturalne - polega na odłączeniu silnika od źródła zasilającego. W wyniku występującego momentu
hamującego wytworzonego przez maszynę napędzaną oraz przez łożyska i wentylator silnika z czasem
energia kinetyczna części wirujących jest zamieniona na ciepło i silnik staje.
b)
mechaniczne - polega na zastosowaniu hamulców ciernych, które zamieniają energię kinetyczną
części wirujących na ciepło w trących się tarczach i klockach hamulcowych lub bębnach i szczękach
hamulcowych c) elektryczne silnikiem - hamowanie, w którym silnik elektryczny, pracując jako hamulce,
wytwarza moment obrotowy mający przeciwny zwrot do zwrotu wirowania wirnika w czasie normalnej
pracy silnika. wyróżnia się:
-hamowanie przeciw włączeniem (przeciwprądem) - polega na tym, że silnik indukcyjny wyłącza się z sieci,
po czym przełącza się na przeciwny kierunek wirowania i ponownie włącza do sieci.
-
hamowanie prądnicowe (odzyskowe) - zachodzi gdy wirnik silnika ma prędkość obrotową większą
od prędkości synchronicznej.

-
hamowanie prądem stałym (dynamiczne) polega na odłączeniu uzwojenia stojana silnika od sieci
prądu przemiennego i połączeniu dwóch zacisków tego uzwojenia ze źródłem napięcia stałego. W stojanie
silnika powstaje wówczas pole magnetyczne nieruchome, które indukuje prąd w obracającym się wirniku.
Prądy te wywołują znaczny moment hamujący zmniejszający prędkość obrotową do zera.
28. Silnik indukcyjny jednofazowy.
Stojan silnika jednofazowego ma jedno uzwojenie zasilane jednofazowo. Wirnik silnika wykonywany jest
jako klatkowy i ma taką samą konstrukcję jak wirnik silników trójfazowych. Sinusoidalnie zmienny prąd
jednofazowy płynący w uzwojeniu stajana wytwarza w jego wnętrzu nieruchome w przestrzeni i oscylujące
w czasie pole magnetyczne. Pole takie teoretycznie można przyjąć za sumę dwóch pól magnetycznych o
równych strumieniach lecz wirujących w przeciwne strony z prędkością kątową ωp. Można przyjąć że te dwa
wirujące pola magnetyczne, oddziałując indywidualnie na wirnik, wytwarzają w nim 2 momenty
elektromagnetyczne. Moment elektromagnetyczny jest równy sumie tych momentów czyli M=. Po włączeniu
silnika, kiedy wirnik jest nieruchomy, moment wypadkowy M jest równy zeru. W celu uruchomienia silnika
należy mu nadać prędkość obrotową o dowolnym zwrocie, większą od prędkości obrotowej wynikającej z
charakterystyki mechanicznej silnika. W silnikach jednofazowych do wytworzenia momentu rozruchowego
służy dodatkowe uzwojenie w stojanie, nazwane uzwojeniem pomocniczym; podstawowe uzwojenie nazywa
się uzwojeniem głównym lub roboczym. Osie obu uzwojeń są przesunięte w przestrzeni o kąt 90˚. Obydwa
uzwojenia są zasilane tym samym napięciem jednofazowym. Aby uzyskać niezbędne do wytworzenia
początkowego momentu rozruchowego przemieszczenia w czasie prądu uzwojenia pomocniczego względem
prądu uzwojenia głównego, umocnienie pomocnicze wykonuje się z cienkiego drutu, co zwiększa jego
rezystancję. Bardzo często jednak w celu uzyskania tego przesunięcia do obwodu uzwojenia włącza się
kondensator. W wyniku przepływu prądu przez te uzwojenia zostaje wytworzone pole magnetyczne wirujące
eliptycznie. Uzwojenie pomocnicze o powiększonej rezystancji jest najczęściej włączane tylko na okres
rozruchu. Natomiast uzwojenie pomocnicze z kondensatorem może być załączane na czas rozruchu lub może
być włączone na stałe.


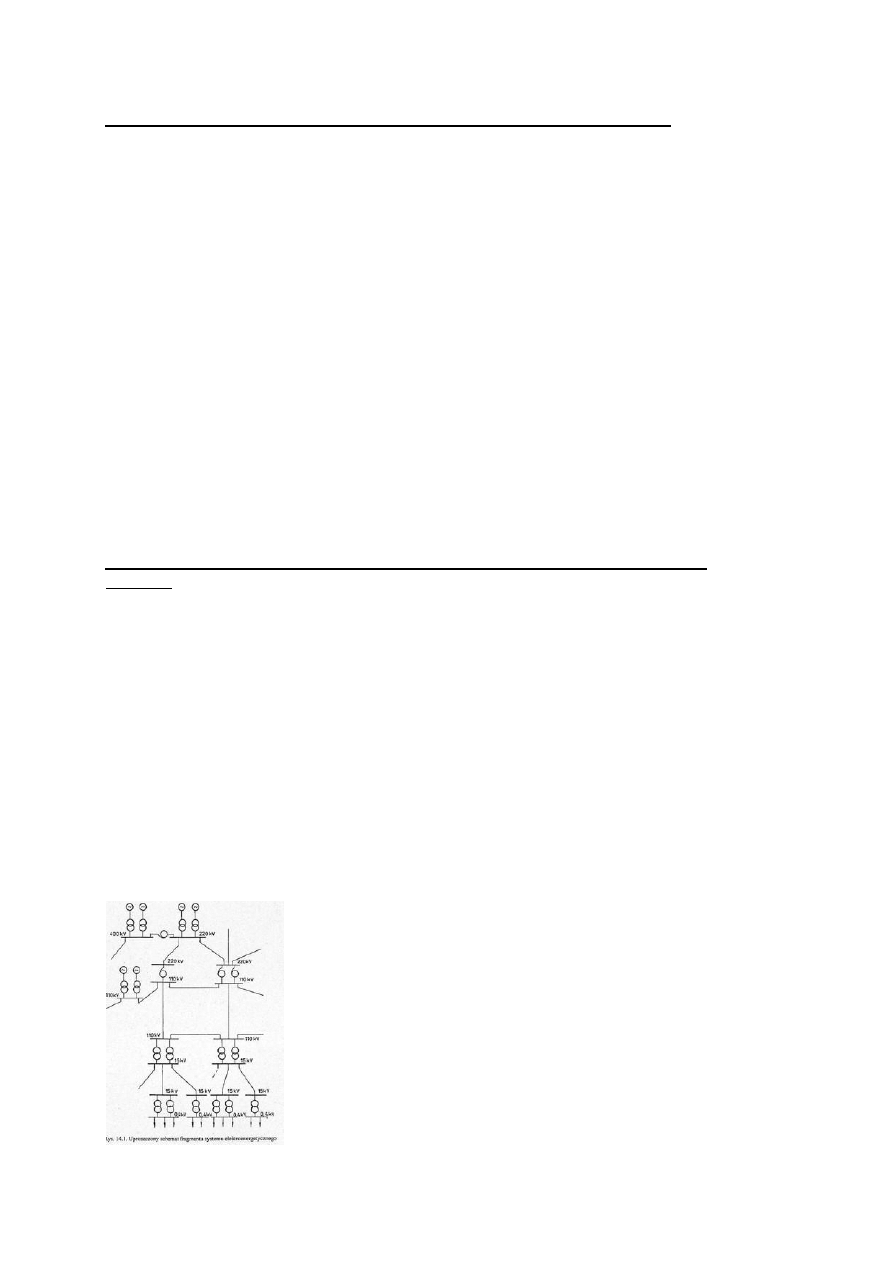
34. Wiadomości ogólne o systemie elektroenergetycznym; uproszczony schemat systemu.
system elektroenergetyczny - zespół urządzeń służących do wytwarzania, przesyłania i rozdzielania energii
elektrycznej. Zadaniem systemu elektroenergetycznemu jest zapewnienie odbiorcom ciągłej dostawy
energii elektrycznej. W skład systemu elektroenergetycznego wchodzą elektrownie oraz sieci
elektroenergetyczne, przy czym sieć elektroenergetyczna jest zespołem urządzeń do przesyłania i
rozdzielania energii.
Sieć elektroenergetyczna składa się z linii służących do przesyłania energii oraz ze stacji
elektroenergetycznych. W stacjach elektroenergetycznych następuje rozdział albo przetwarzanie lub
jednocześnie rozdział i przetwarzanie energii elektrycznej. Jeżeli w stacji następuje rozdział en elektr. z
obwodów zasilających na obwody odbiorcze na tym samym poziomie napięcia, to nazywa się ją stacją
rozdzielczą albo rozdzielnią. Stacja, w której następuje przetworzenie en elektr. o jednym napięciu na en
elektr. o innym napięciu nazywa się stacją transformatorową. Zwykle w takich stacjach następuje także
rozdział na en elektr. - stacje transformaorowo-rozdzielcze.
W elektrowniach odbywa się przetwarzanie energii dostarczonej przez występujące w przyrodzie źródła
energii na en elektr. W Polsce ponad 95% en jest w elektrowniach cieplnych. Moc generatorów
zainstalowanych w tych elektrowniach wynosi ok. 34000 MW. Pewna część en elektr. w Polsce jest
wytwarzana w elektr. wodnych, moc generatorów zainstalowanych wyniosła ok 2000 MW
Linie elektroenergetyczne są elementami sieci elektroenergetycznej łączącymi elektrownie ze stacjami
transformatorowymi, rozdzielczymi, odbiorcami en elektr. Mogą być wykonane jako nadpowietrzne albo
kablowe.
W liniach najwyższych napięć, zwykle przy napięciu większym od 22okV, stosuje się przewody fazowe w
postaci tzw. przewodów wiązkowych.
35. Zasady bezpiecznej obsługi urządzeń elektrycznych 36. Oddziaływanie prądu na organizm
człowieka.
W przypadku uszkodzenia izolacji elektrycznej, gdy człowiek dotknie tej obudowy przez ciało
dotykającego popłynie do ziemi prąd, elektr.; Mówi się wówczas o rażeniu prądem elektr. Którego
następstwem jest porażenie elektryczne, czyli zespół zagrażających zdrowiu zmian fizycznych,
chemicznych i biologicznych wywołanych w organizmie przez przepływający prąd?
Bardzo niebezpieczny jest dla człowieka prąd przepływający między jedną a drugą ręką lub między ręką a
stopą, gdyż na drodze prądu znajduj się serce; jeszcze bardziej niebezpieczny jest prąd, który płynie przez
głowę.
Człowiek jest bardziej wrażliwy na rażenie prądem przemiennym o częstotliwości sieciowej (50Hz) niż na
rażenie prądem stałym. Prąd przemienny:
-prąd o wartości ok. 1mA - niewyczuwalny
- prąd p wartości od kilku do 15 mA - wywołuje ból i skurcze mięśni palców i ramion - 15-20mA - silny ból
- 25-75 mA - nieregularność pracy serca, b silne skurcze mięśni i utratę przytomności
-powyżej 75 mA - szok, utratę przytomności, migotanie komór serca, oparzenia
Rn- rezystancja naskórka dłoni
Rc - rezystancja ciała
Rp - rezystancja przejścia między stopami człowieka a ziemią
37. Ochrona przed porażeniem prądem elektr.
Porażeniem prądem elektr następuje najczęściej na skutek dotknięcia lub uchwycenia ręką części urządzeń
elektrycznych znajdującego się w danej chwili pod napięciem. Często też występuje przy uszkodzeniach
izolacji urządzenia elektr i przy nieskutecznym działaniu środków ochrony przeciwporażeniowej
Wyszukiwarka
Podobne podstrony:
opracowanie na egzamin Opydo (obszerniejsze), mibm 3, elektrotechnika
Opracowania na egzamin z OP id Nieznany
Prawoznawstwo - opracowanie na egzamin, Prawoznawstwo
Opracowania na egzamin z RPE RPE
Poetyka material na egzamin id Nieznany
Fizyka opracowanie na egzamin, wersja 2
Opracowanie na egzamin z fizyki, semestr I(1)
Opracowanie pytan EGZAMIN Inzyn Nieznany
ANTROPOLOGIA OPRACOWANIE NA EGZAMIN
Filozofia opracowanie na egzamin
MAŁE+GRUPY+ OPRACOWANIE NA EGZAMIN, socjologia
Metodologia wykłady - opracowanie na egzamin, studia różne, Opracowania
egz end, opracowania na egzamin obrone, Wstęp do nauki o państwie , prawie i polityce
Opracowania na egzamin z RPE, 3. Celtowie, CELTOWIE
Opracowanie na egzamin
więcej podobnych podstron