AKADEMIA MORSKA W SZCZECINIE
JEDNOSTKA ORGANIZACYJNA:
Wydział Nawigacyjny
Zakład Bezpieczeństwa Nawigacyjnego
INSTRUKCJA
URZĄDZENIA NAWIGACYJNE
LABORATORIUM SYMULATORA ARPA CZ. 2
Opracował:
Wiesław Juszkiewicz
Zatwierdził:
Wiesław Juszkiewicz
Obowiązuje od: 22.09.2014

~ 2 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.

~ 3 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
RAMOWY SPIS TREŚCI
1. TEMATYKA ZAJĘĆ LABORATORYJNYCH
5
2. EFEKTY KSZTAŁCENIA, METODY I KRYTERIA OCENY
7
3. ĆWICZENIE NR 1
9
4. ĆWICZENIE NR 2
17
5. ĆWICZENIE NR 3
23
6. ĆWICZENIE NR 4
29
7. ĆWICZENIE NR 5
33
8. ĆWICZENIE NR 6
39
9. ĆWICZENIE NR 7
43
10. ĆWICZENIE NR 8
47
11. LITERATURA
49
12. ZAŁĄCZNIKI
51

~ 4 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
~ 5 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
1. TEMATYKA ZAJĘĆ LABORATORYJNYCH
Ćwiczenie 1
Zapoznanie się z mostkiem nawigacyjnym symulatora.
Włączenie i regulacja podstawowych nastaw ARPA. Akwizycja
ręczna obiektów i interpretacja informacji ARPA (zobrazowanie
wektorowe, stosowane symbole, meldunek radarowy, alarmy i
ostrzeżenia) – ćwiczenia na akwenie otwartym.
2 godz.
Ćwiczenie 2
Funkcja automatycznej akwizycji oraz historii ruchu obiektów –
ćwiczenia na akwenie otwartym w warunkach ograniczonej
widzialności.
2 godz.
Ćwiczenie 3
Planowanie manewrów zapobiegawczych z użyciem funkcji
manewru próbnego (TRIAL), dokładność planowania –
ćwiczenia na akwenie otwartym w warunkach ograniczonej
widzialności przy dużym natężeniu ruchu statków.
2 godz.
Ćwiczenie 4
Sposoby określania całkowitego znosu statku, stabilizacja obrazu
radarowego względem wody i względem dna – ćwiczenia na
akwenach
przybrzeżnych
z
wykorzystaniem
urządzeń
radarowych do nawigacji i unikania kolizji.
2 godz.
Ćwiczenie 5
Dokładność procesu śledzenia. Ograniczenia i błędy ARPA.
2 godz.
Ćwiczenie 6
Wykorzystanie elektronicznych map radarowych - ćwiczenia
kompleksowe z wykorzystaniem urządzeń radarowych do
nawigacji i unikania kolizji na akwenach ograniczonych o dużym
zagęszczeniu ruchu statków w warunkach ograniczonej
widzialności.
2 godz.
Ćwiczenie 7
Ćwiczenia
kompleksowe
z
wykorzystaniem
urządzeń
radarowych do nawigacji i unikania kolizji na akwenach
trudnych nawigacyjnie (torach wodnych) w warunkach
ograniczonej widzialności.
2 godz.
Ćwiczenie 8
Testowanie urządzeń ARPA.
1 godz.

~ 6 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
~ 7 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
2. EFEKTY KSZTAŁCENIA, METODY I KRYTERIA OCENY
Efekty kształcenia – semestr V/VI
Kierunkowe
EK1
Ma wiedzę z zakresu wymagań technicznych, zasad wykorzystania i ograniczeń syste-
mów z automatycznym śledzeniem ech.
K_W13; K_W15;
K_W16: K_W17;
K_W23:K_W24
EK2
Potrafi w sposób efektywny wykorzystywać systemy radarowe z automatycznym
śledzeniem ech do pozyskiwania i analizy informacji o sytuacji kolizyjnej oraz
podejmuje właściwe i skuteczne decyzje antykolizyjne i nawigacyjne.
K_U01; K_U12;
K_U18; K_U24;
K_U28
EK3
Posiada umiejętność dowodzenia wachtą nawigacyjną, precyzyjnie wyznaczając
zadania członkom wachty oraz nadzorując prawidłowość ich wykonania.
K_W12; K_K03;
K_K04
Metody i kryteria oceny
EK1
Ma wiedzę z zakresu wymagań technicznych, zasad wykorzystania i ograniczeń systemów z auto-
matycznym śledzeniem ech.
Metody oceny
Zaliczenie ćwiczeń, laboratoriów/ symulatorów.
Kryteria/ Ocena
2
3
3,5 - 4
4,5 - 5
Kryterium 1
Znajomość za-
gadnień związanych
z wykorzystaniem
systemów
radarowych z au-
tomatycznym śle-
dzeniem ech.
Nie zna podstawo-
wych wymagań tech-
nicznych oraz zasad
wykorzystania syste-
mów z automatycz-
nym śledzeniem ech
na mostku.
Zna wymagania
techniczne oraz
podsta-wowe funkcje
systemów z
automatycznym
śledzeniem ech.
Zna wymagania
techniczne,
ograniczenia oraz
podstawowe i do-
datkowe funkcje
systemów z
automatycznym
śledzeniem ech wraz
zasadami ich
wykorzystania.
Zna wymagania tech-
niczne, ograniczenia
oraz podstawowe i
dodatkowe funkcje
systemów z automa-
tycznym śledzeniem
ech wraz zasadami
ich wykorzystania, a
także zasady współ-
pracy tych urządzeń
w systemie mostka
zintegrowanego
EK2
Potrafi w sposób efektywny wykorzystywać systemy radarowe z automatycznym śledzeniem ech do
pozyskiwania i analizy informacji o sytuacji kolizyjnej oraz podejmuje właściwe i skuteczne
decyzje antykolizyjne i nawigacyjne.
Metody oceny
Zaliczenie ćwiczeń, laboratoriów/ symulatorów.
Kryteria/ Ocena
2
3
3,5 - 4
4,5 - 5
Kryterium 1
Wykorzystanie
urządzeń z auto-
matycznym śle-
dzeniem ech do
unikania kolizji.
Nie potrafi prawi-
dłowo uzyskać i zin-
terpretować informa-
cji o sytuacji kolizyj-
nej panującej wokół
statku własnego.
Potrafi uzyskać in-
formację o sytuacji
kolizyjnej panującej
wokół statku wła-
snego, właściwie ją
zinterpretować i wy-
korzystać do zapla-
nowania akcji zapo-
biegawczej.
Potrafi uzyskać
informację o sytuacji
kolizyjnej panującej
wokół statku
własnego, właściwie
ją zinterpretować i
wykorzystać do
zaplanowania akcji
zapobiegawczej z
właściwym
uwzględnieniem
błędów i ograniczeń
urządzeń z
automatycznym
śledzeniem echa.
Potrafi uzyskać in-
formację o sytuacji
kolizyjnej panującej
wokół statku wła-
snego, właściwie ją
zinterpretować i wy-
korzystać do zapla-
nowania akcji zapo-
biegawczej z właści-
wym
uwzględnieniem
błędów i ograniczeń
urządzeń z automa-
tycznym śledzeniem
echa z uwzględnie-
niem przepisów re-
gulujących zachowa-
nie statków w sytu-
acjach kolizyjnych.
Kryterium 2
Wykorzystanie
urządzeń z auto-
matycznym śle-
dzeniem ech do
prowadzenia bez-
piecznej nawigacji.
Nie potrafi włączyć i
prawidłowo
wykorzystać
podstawowych
funkcji systemów z
automatycznym śle-
dzeniem echa.
Potrafi uruchomić i
wykorzystać podsta-
wowe funkcje syste-
mów z automatycz-
nym śledzeniem echa
w podstawowym za-
kresie.
Potrafi uruchomić i
wy-korzystać
podstawowe funkcje
systemów z au-
tomatycznym śledze-
niem echa wraz z
prawidłową
interpretacją
ograniczeń
systemów.
Potrafi uruchomić i
wykorzystać podsta-
wowe i dodatkowe
funkcje systemów z
automatycznym śle-
dzeniem echa w za-
kresie wraz z prawi-
dłową interpretacją
ograniczeń oraz moż-
liwością współpracy
w ramach systemu
mostka zintegrowa-
nego.

~ 8 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
EK3
Posiada umiejętność dowodzenia wachtą nawigacyjną, precyzyjnie wyznaczając zadania członkom
wachty oraz nadzorując prawidłowość ich wykonania.
Metody oceny
Zaliczenie ćwiczeń, laboratoriów/ symulatorów.
Kryteria/ Ocena
2
3
3,5 - 4
4,5 - 5
Kryterium 1
Dowodzenie wachtą
nawigacyjną
Nie potrafi właściwie
podzielić zadań
nawigacyjnych
pomiędzy członków
wachty.
Potrafi dokonać po-
działu zadań nawiga-
cyjnych pomiędzy
członków wachty.
Potrafi dokonać po-
działu zadań nawiga-
cyjnych pomiędzy
członków wachty i
prowadzić
właściwego nadzoru
nad ich wykonaniem.
Potrafi dokonać po-
działu zadań nawiga-
cyjnych pomiędzy
członków wachty
oraz prowadzić wła-
ściwy nadzór nad ich
wykonaniem oraz
ocenić przydatność
członków wachty.

~ 9 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
3. ĆWICZENIE NR 1
TEMAT:
Zapoznanie się z mostkiem nawigacyjnym symulatora. Włączenie i regulacja
podstawowych nastaw ARPA. Akwizycja ręczna obiektów i interpretacja
informacji ARPA (zobrazowanie wektorowe, stosowane symbole, meldunek
radarowy, alarmy i ostrzeżenia) – ćwiczenia na akwenie otwartym.
CEL I ZAKRES ĆWICZENIA
Celem ćwiczenia jest zapoznanie się z możliwościami i wyposażeniem symulatora
nawigacyjno-radarowego QR-303, warunkami realizacji zajęć laboratoryjnych, podstawowymi
funkcjami zainstalowanych w nim urządzeń ARPA (funkcja ręcznej akwizycji obiektów, alarmy i
ostrzeżenia, zobrazowanie wektorowe informacji, kasowanie obiektów ze śledzenia) oraz nabycie
umiejętności prawidłowej interpretacji informacji o śledzonych obiektach.
CZĘŚĆ TEORETYCZNA
Charakterystyka symulatora
Symulator QR 303 jest przeznaczony do szkolenia nawigatorów w aspekcie nawigacji
radarowej i rozwiązywania sytuacji kolizyjnych. Umożliwia on tworzenie ćwiczeń pod kątem
wykorzystania urządzeń ARPA, wskaźników radarowych i sporządzania nakresów radarowych.
Symulator składa się z sześciu stanowisk, z których każde reprezentuje rzeczywisty statek.
Pojedyncze stanowisko składa się z konsoli manewrowej oraz wskaźnika radarowego (ARPA).
Symulacja jest sterowana z komputera PC, który jest elementem stanowiska instruktora. Instruktor
może określić dodatkowo scenariusz ćwiczenia, na który min. składają się jednostki obce, obiekty
stałe i linia brzegowa. Na podstawie scenariusza ćwiczenia jest generowany obraz na ekranie
wskaźników radarowych. Dzięki temu można szkolić studentów w warunkach zbliżonych do
rzeczywistych pod kątem:
nawigacji radarowej
interpretacji ruchu względnego i rzeczywistego
ręcznego sporządzania nakresów radarowych
oceny sytuacji nawigacyjnej i unikania kolizji
obsługi urządzeń ARPA
nawigacji na akwenach ograniczonych
manewrowania statkiem.
W symulatorze dostępne są cztery typy urządzeń ARPA i tak na poszczególnych stanowiskach
zainstalowano:
Mostek 1 - ARPA Concept HR 3061 firmy Kelvin Hughes
Mostek 2 - ARPA Nucleus 6000A firmy Kelvin Hughes
Mostek 3 - ARPA DB-7 firmy Norcontrol
Mostek 4 - ARPA DB-2000 firmy Norcontrol
Mostek 5 - ARPA Concept HR 3061 firmy Kelvin Hughes
Mostek 6 - ARPA Nucleus 6000A firmy Kelvin Hughes.
Podstawy obsługi konsoli manewrowej oraz wszystkich urządzeń ARPA zainstalowanych
w symulatorze nawigacyjno-radarowym QR-303 zawarte są w poszczególnych instrukcjach obsługi
zamieszczonych w załącznikach.

~ 10 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Włączanie i regulacja urządzeń ARPA
Podstawowym zadaniem radaru podczas warunków ograniczonej widzialności jest wykrywanie
znajdujących się w pobliżu statku własnego obiektów, które nie mogą być obserwowane wzrokowo.
Odległości, w jakich większość obiektów jest wykrywana za pomocą radaru są wystarczające z punktu
widzenia bezpieczeństwa statku. Wyjątkiem są tu jedynie obiekty małe, których odległości wykrycia
są mniejsze niż w normalnych warunkach obserwacji wzrokowej. Warunkiem wykrycia obiektu
w możliwie największej odległości od statku własnego jest staranna regulacja radaru. Podstawowe
błędy podczas regulacji obrazu radarowego polegają na:
nieprawidłowym ustawieniu jasności obrazu radarowego, co powoduje zmniejszenie kontrastu
ech i ekranu (przy zbyt dużej jasności) lub zmniejszenie siły ech (przy zbyt małej jasności), co
może powodować brak na ekranie ech obiektów o małej skutecznej powierzchni odbicia
i zmniejszenie odległości wyświetlania ech silnych; po zmianie zakresów należy pamiętać o
poprawie nastawy jasności;
nieprawidłowym ustawieniem strojenia, co drastycznie zmniejsza zasięgi wykrywania
obiektów; strojenie powinno zapewnić wykrycie maksymalnej liczby obiektów na ekranie
radaru (maksymalne występowanie ech od fal), w spotykanych urządzeniach dostępne są
wskaźniki jakości strojenia; należy pamiętać o sprawdzaniu jakości zestrojenia radaru w
przypadku zmiany zakresu jego pracy, a także bez jego zmiany zwłaszcza w pierwszym
okresie jego pracy zaraz po włączeniu;
nieprawidłowej regulacji wzmocnienia; zbyt duża wartość nastawy powoduje pojawienie się
szumów własnych radaru, zbyt mała – wygaszenie ech zwłaszcza pochodzących od obiektów
małych lub znajdujących się w większej odległości; prawidłowe ustawienie wzmocnienia to
takie, gdy szumy własne radaru zaczynają się ledwo pojawiać na ekranie radaru;
nieprawidłowa nastawa zasięgowej regulacji wzmocnienia (ZRW), co może doprowadzić do
eliminacji z ekranu ech od obiektów znajdujących się w pobliżu statku własnego; jej
prawidłowa regulacja powinna zapewnić eliminację ech od fal, ale w takim stopniu, aby
drobne ślady odbić na ekranie pozostały;
nieprawidłowa regulacja rozróżnialnika, co przy jego dużej nastawie może spowodować
zmniejszenie zasięgu radaru;
ustawieniu zbyt dużej jasności wskaźników i informacji alfanumerycznych wyświetlonych na
ekranie (np. kręgi stałe odległości, kreski namiarowe, wektory, mapy radarowe, meldunki
radarowe) co powoduje rozświetlenie ekranu i zmniejszenie kontrastu zobrazowania
pogarszając możliwość wykrycia małych ech.
Po włączeniu i dokonaniu właściwej regulacji obrazu radarowego (jasność, wzmocnienie,
strojenie, ZRW, rozróżnialnik) należy pamiętać o poprawnym wprowadzeniu informacji
o parametrach ruchu statku własnego tzn. prędkości (źródło informacji: log) i kursu (źródło
informacji: żyrokompas - wprowadzenie odpowiedniej wartości kursu statku własnego). Należy także
wybrać odpowiedni rodzaj zobrazowania, zorientowania, stabilizacji obrazu, a także dodatkowych
funkcji wykorzystywanych w czasie prowadzenia obserwacji radarowej.
UWAGA:
W przypadku urządzeń zainstalowanych w symulatorze należy zwrócić uwagę na to, że pracują
one w trybie „slave” (obraz radarowy uzyskiwany jest na podstawie sygnału generowanego przez
komputer) i w związku z tym podczas włączania radaru nie dokonuje się regulacji strojenia (funkcja
TUNE).
Akwizycja ręczna obiektów
Akwizycja jest procesem polegającym na wprowadzeniu do systemu początkowej pozycji
obiektu w celu rozpoczęcia procesu śledzenia.
Zgodnie z wymogami IMO wybór i wprowadzanie obiektów do śledzenia może odbywać się
ręcznie lub automatycznie, przy czym zawsze powinna istnieć możliwość ręcznej akwizycji
i kasowania ech ze śledzenia. Akwizycja powinna mieć właściwości nie gorsze od możliwych do
osiągnięcia przez obserwatora radarowego.
~ 11 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Podstawowym rodzajem akwizycji jest więc akwizycja ręczna. Polega ona na wprowadzeniu
przez operatora do systemu przybliżonych współrzędnych wzrokowo wykrytego echa przez
naprowadzenie na to echo znacznika, kierowanego za pomocą manipulatora (joystick, tracker ball)
i wydaniu odpowiedniej komendy (Enter Plot, Enter, Acquire Target itp.).
Ta metoda akwizycji wymaga stałej obserwacji ekranu i każdorazowego podejmowania decyzji
o konieczności wprowadzenia echa do śledzenia. Przy dużej ilości ech, może wystąpić konieczność
przerywania procesu śledzenia niektórych z nich, aby umożliwić śledzenie innych, bardziej
niebezpiecznych. Natomiast przy małym ruchu, gdy prawdopodobieństwo pojawienia się echa jest
małe, ciągła obserwacja ekranu może być uciążliwa.
Interpretacja zobrazowania wektorowego
Wektorowa prezentacja informacji powinna zapewniać wyświetlenie zarówno wektorów
względnych jak i rzeczywistych z płynną lub skokową zmianą czasowej długości wektorów
i informacją o aktualnie używanej ich długości.
Często spotykanym rozwiązaniem jest połączenie aktualnie używanego rodzaju zobrazowania
(rzeczywiste lub względne) z rodzajem wyświetlanych wektorów (odpowiednio rzeczywiste
i względne) jednak niektórzy producenci umożliwiają bardziej elastyczne podejście. Operator ma
możliwość dowolnego wyboru rodzaju wyświetlanych wektorów niezależnie od aktualnie wybranego
zobrazowania. Taki rodzaj prezentacji pozwala na połączenie dwóch typów informacji (np. przy
wyświetleniu sztucznie generowanej poświaty innej niż wyświetlane wektory) jednak operator musi
na to zwracać uwagę odpowiednio interpretując dostępne dane.
W przypadku wektorów zgodnych z rodzajem wybranego przez operatora zobrazowania istnieje
funkcja chwilowego „podglądu” innego typu wektorów (np. Vector mode), dzięki której operator
może na chwilę włączyć sobie np. wektory względne mając nadal na ekranie wyświetlane
zobrazowanie rzeczywiste, z całą informacją z nim właśnie związaną (np. pozycje przeszłe obiektów).
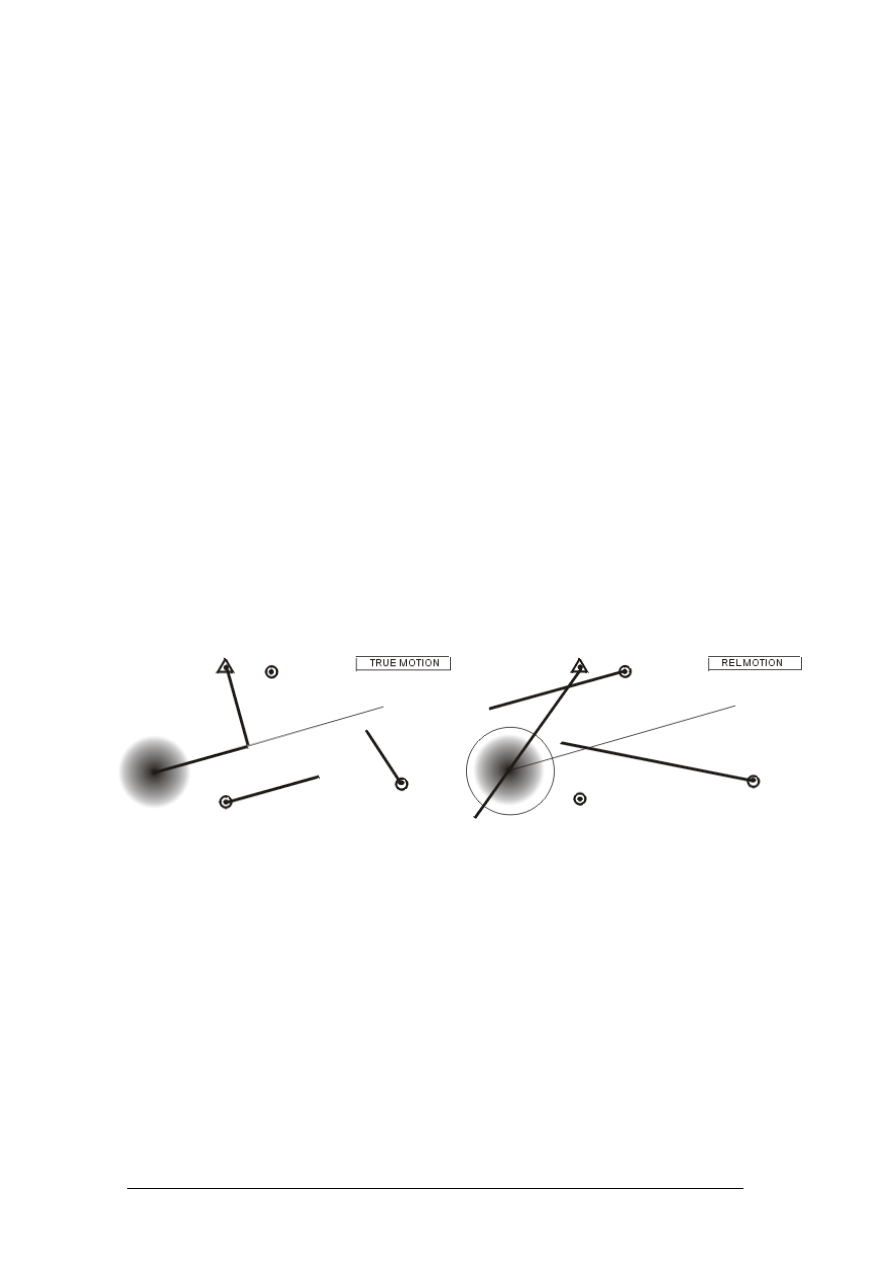
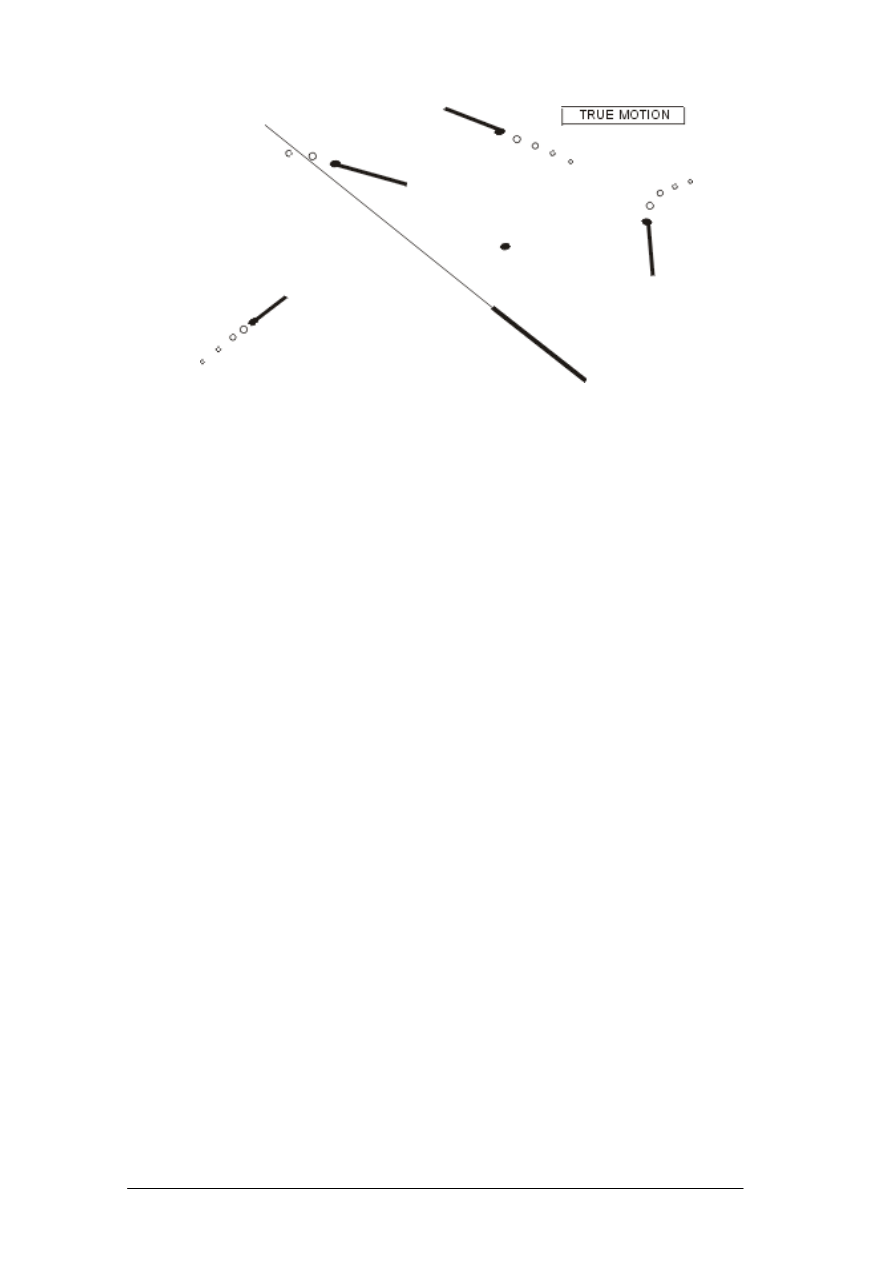
Różnice w prezentacji tej samej sytuacji przy zastosowaniu zobrazowania rzeczywistego i względnego
zostały pokazane na rys. 3.1.
Rys. 3.1. Prezentacja sytuacji kolizyjnej przy zobrazowaniu ruchu rzeczywistego i względnego.
Interpretacja wyświetlanych na ekranie wektorów powinna być taka, że każdy obiekt, po czasie
równym ustalonej czasowej skali wektorów, znajdzie się w końcu swojego wektora. Oznacza to, że
jeżeli końce dwóch wektorów leżą blisko siebie, może dojść do nadmiernego zbliżenia tych statków
jeśli przynajmniej jeden z nich nie wykona manewru zapobiegawczego. Znajdą się one bowiem w tym
samym czasie w tym samym miejscu.
W przypadku wektorów względnych najbardziej niebezpiecznymi są zawsze te obiekty, których
wektory przechodzą przez lub w pobliżu pozycji statku własnego, natomiast przy wektorach
rzeczywistych, te których końce wektorów (przy odpowiednio dobranej ich długości czasowej) znajdą
się w pobliżu końca wektora rzeczywistego własnej jednostki.
Przy ustalaniu długości wektorów (funkcja Vector Time) należy brać pod uwagę to, aby nie były
one zbyt długie (powoduje to zaciemnienie informacji prezentowanej na ekranie, a niektóre wektory
wychodzą po za ekran), ani zbyt krótkie (powstaje złudzenie bezpieczeństwa sytuacji, gdyż żaden
wektor nie znajduje się blisko pozycji statku własnego lub końca naszego wektora). Płynna zmiana
długości wyświetlanych wektorów pozwala, w pewnym sensie, w sposób dynamiczny prześledzić
~ 12 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
rozwój sytuacji, oczywiście przy założeniu, że żaden ze statków nie będzie w najbliższym czasie
manewrował.
Meldunek radarowy w ARPA
Na żądanie operatora powinna być natychmiast dostępna, w postaci alfanumerycznej,
następująca informacja o każdym śledzonym obiekcie:
aktualna odległość do obiektu (Distance)
aktualny namiar na obiekt (Bearing)
CPA (Closest Point of Approach)
TCPA (Time to Closest Point of Approach)
obliczony kurs rzeczywisty obiektu (True Course)
obliczona prędkość rzeczywista obiektu (True Speed).
Ponadto typ uzyskanych danych powinien zostać jednoznacznie wskazany (dane uzyskane na
podstawie śledzenia obiektu lub dane z AIS).
Dane o parametrach ruchu rzeczywistego obiektu powinny dodatkowo posiadać identyfikację
tego czy odnoszą się do ruchu stabilizowanego względem wody czy też dna. Jeśli dane wyświetlane są
dla kilku obiektów jednocześnie to powinny być jednoznacznie identyfikowane przez numer obiektu.
W takiej sytuacji dopuszczalne jest ograniczenie ilości informacji o obiekcie lecz nie mniej niż dwie
wielkości powinny być prezentowane dla każdego wybranego obiektu. Jeśli są wyświetlane po dwie
wielkości dla każdego echa to powinny one być odpowiednio pogrupowane (namiar i odległość, CPA
i TCPA, kurs i prędkość).
Symbolika ARPA
Różnorodność stosowanych w ARPA symboli i oznaczeń w dużym stopniu utrudniała właściwą
interpretację wyświetlanej na wskaźniku informacji. Wraz ze zmianą przepisów zawierających
wymagania techniczne dot. urządzeń ARPA ujednolicono stosowaną w ARPA symbolikę. Rezolucja
A.823(19) zaleca aby wszystkie urządzenia instalowane na statkach po 01.01.1997 roku prezentowały
ujednolicone symbole zgodne z wymogami Międzynarodowej Komisji Elektrotechnicznej
(International Elektrotechnical Commision). Zestawienie informacji zawartych w Załączniku E do
zalecenia 872IEC przedstawia tabela 3.1.
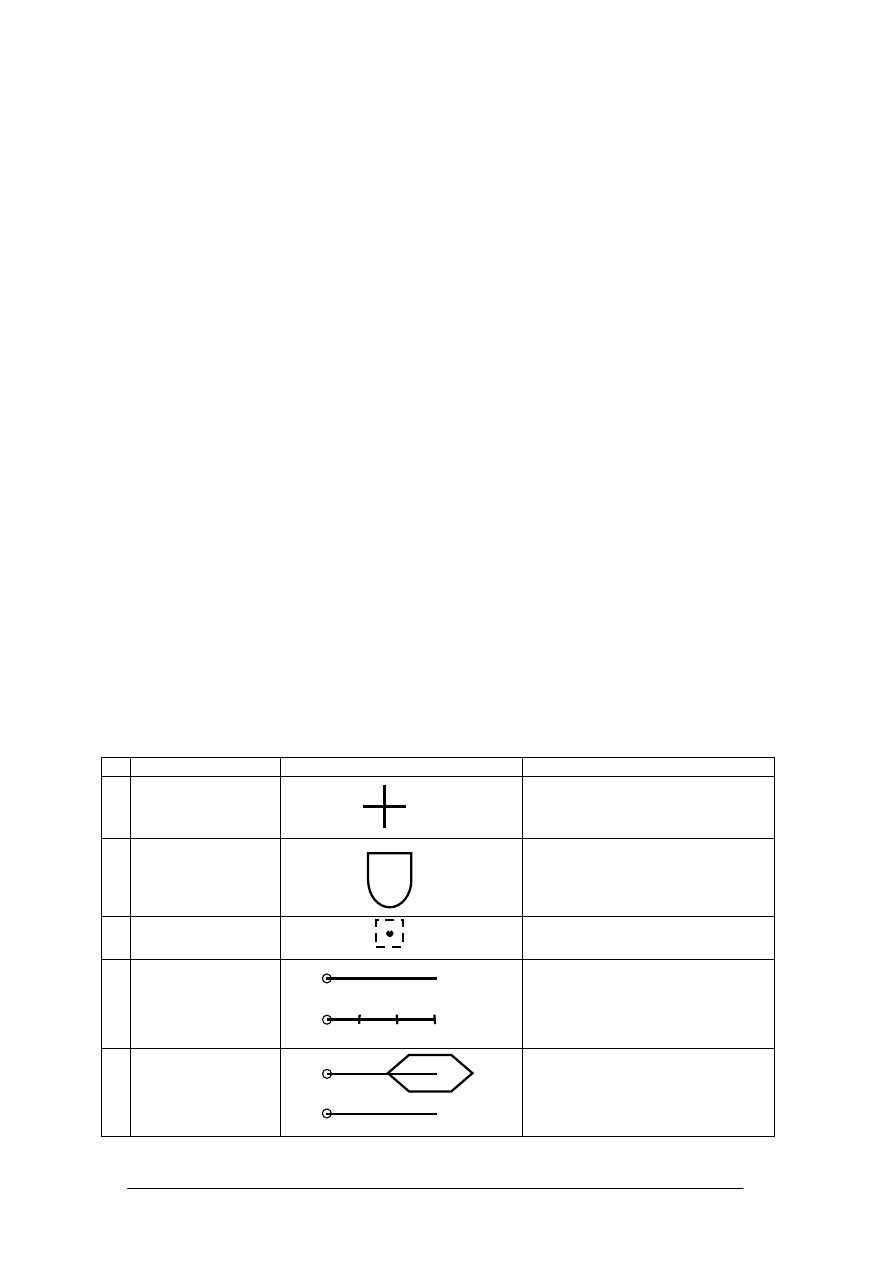
Tabela 3.1 Symbole urządzeń ARPA według IEC.
Lp.
Funkcja/obiekt
Symbol
Opis i uwagi
1.
Znacznik (marker) Akwizycja
ręczna i nakresy
Krzyż jako znacznik do ręcznej akwizycji obiektów.
2.
Obszar akwizycji automatycznej
Linia ciągła wskazująca granice obszaru automatycznej
akwizycji z uwzględnieniem obszarów wyłączonych.
3.
Obiekt w fazie śledzenia
wstępnego
Kwadrat wykreślony linią przerywaną wokół pozycji
obiektu akwizowanego lub będącego w fazie śledzenia
wstępnego.
4.
Obiekt w fazie śledzenia
ustalonego.
Wektor oznaczający przewidywany ruch rzeczywisty lub
względny obiektu. Wektor może mieć stałą lub
regulowaną skalę czasową. Początek wektora powinien
być zaznaczony kropką lub kółkiem.
5.
Obiekt w fazie śledzenia
ustalonego – zobrazowanie
graficzne.
Obszary zagrożenia kolizyjnego mogą być oznaczane
sześciokątami lub elipsami.
~ 13 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
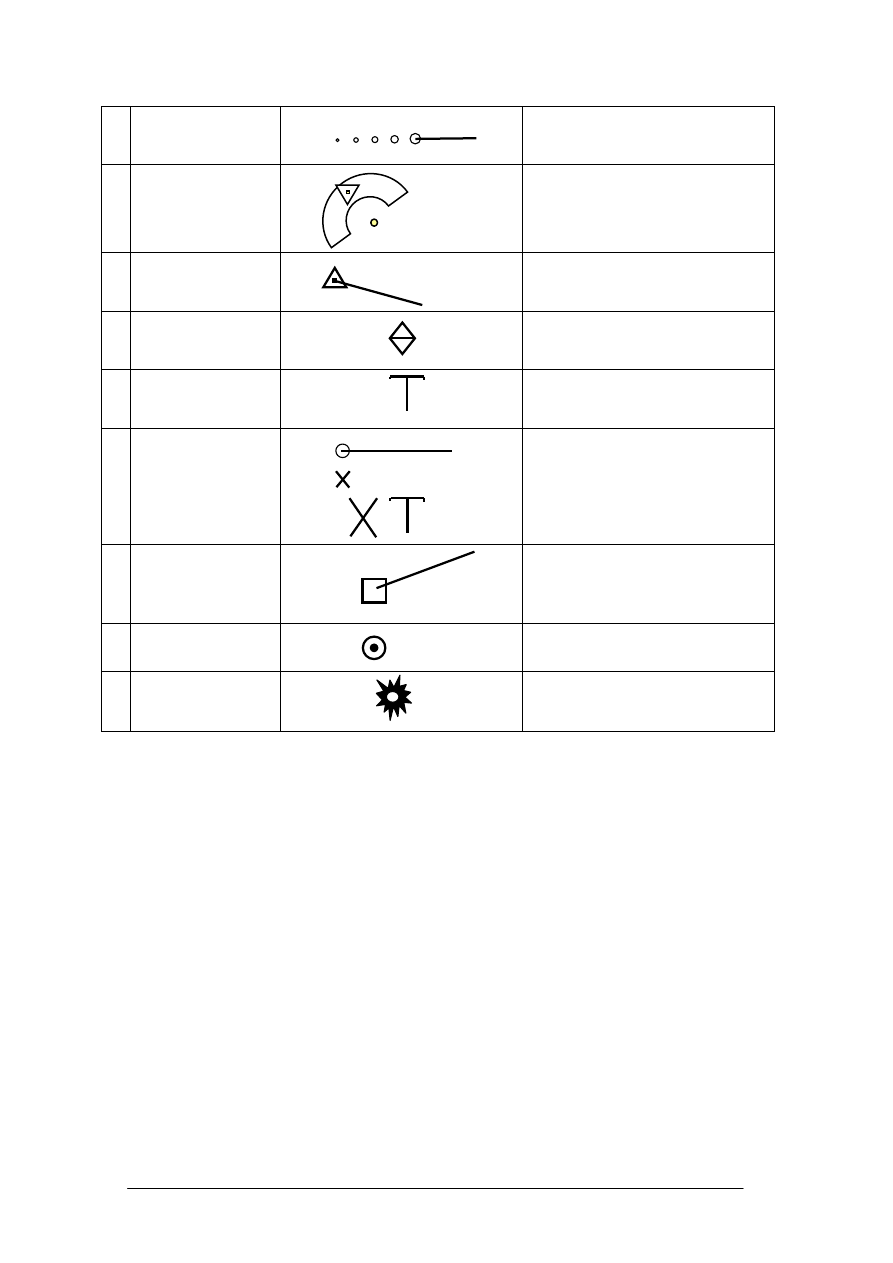
6.
Pozycje przeszłe obiektu.
Pokazywane na żądanie co najmniej 4 kropki lub małe
okręgi przedstawiające pozycje przeszłe w równych
odstępach czasu
7.
Ostrzeżenie o nowym obiekcie
w strefie strzeżonej. (New
Target Warnning)
Trójkąt wierzchołkiem w dół wykreślony wokół pozycji
echa i błyskający z częstotliwością ½ - 1 Hz.
Pierścień czuwający powinien być wykreślony liniami
ciągłymi, a jego szerokość powinna być na tyle mała,
aby nie był mylony z symbolem wymienionym w
punkcie 2.
Może być dodatkowo alarm akustyczny.
8
Ostrzeżenie o obiekcie
stwarzającym zagrożenie.
(CPA/TCPA warning)
Trójkąt wierzchołkiem ku górze, wykreślony wokół
pozycji echa i błyskający z częstotliwością od ½ - 4 Hz.
Może być dodatkowo alarm akustyczny.
9.
Ostrzeżenie o zgubieniu obiektu
ze śledzenia
(Lost Target warning)
Romb utworzony z dwóch równych trójkątów
wymienionych w punktach 7 i 8, wykreślony wokół
ostatniej znanej pozycji echa i błyskający z
częstotliwością od ½ do 1 Hz.
10.
Manewr próbny (Trial)
Litera „T”, błyskająca z częstotliwością od ½ do 1 Hz.
11.
Test
Litera „X”, wyświetlana w dolnej części ekranu i w
pozycji echa testującego z częstotliwością od ½ do 1 Hz..
W czasie manewru próbnego litery „XT” powinny
błyskać w dolnej części ekranu.
12.
Obiekt którego dane są aktualnie
wyświetlane
Kwadrat wykreślony wokół pozycji echa, którego dane
są aktualnie wyświetlane.
13.
Obiekt odniesienia.
R
Symbole jak w punktach 3, 4 i 9 z dołączoną literą R,
jeżeli ech odniesienia jest więcej to odpowiednio z
literami R1, R2, R3 etc..
14.
Obiekt śledzony ale z
wygaszonym wektorem.
Wyraźnie widoczna kropka nad echem rozróżniana
poprzez kontrast lub kolor, ale różna od symboli w
punktach 4 i 5 .
Źródło: opracowanie na podstawie Zał. E do zal. 872IEC.
Alarmy
Alarmy powinny być sygnalizowane w sposób wizualny lub/i akustyczny, a jeśli dotyczą one
śledzonych obiektów, to obiekt wywołujący alarm powinien być w wyraźnie wyróżniony na ekranie.
Stosowanie funkcji alarmów ma na celu zwrócenie uwagi obserwatora na fakt zmiany sytuacji,
panującej dotychczas wokół statku, a także sygnalizację wykrytych nieprawidłowości pracy systemu.
Powinna być także zapewniona możliwość włączenia i wyłączenia przez operatora sygnału
dźwiękowego alarmów.
Urządzenie ARPA powinno posiadać zdolność generowania następujących podstawowych
alarmów:
Alarm przekroczenia strefy chronionej (New Target Warning) – dotyczy każdego wyraźnie
widocznego obiektu zbliżającego się na wskazaną odległość lub przecinającego wybraną
przez obserwatora strefę (symbol: tab. 3.1 pkt. 7).
Alarm przekroczenia granicznych nastaw CPA
LIMIT
i TCPA
LIMIT
(CPA/TCPA Warning,
Collision Warning, Target Threat) – dotyczy śledzonych obiektów, dla których wyliczone
wartości CPA i TCPA są jednocześnie mniejsze od wybranych przez obserwatora wartości
bezpiecznych, określanych przez operatora dla danej wielkości statku, jego zdolności
manewrowych, akwenu na którym znajduje się statek oraz panujących warunków
atmosferycznych i stanu morza (symbol: tab. 3.1 pkt. 8); po skasowaniu alarmu obiekty
kolizyjne będą nadal oznaczone stosownymi symbolami.

~ 14 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Alarm zgubienia echa ze śledzenia (Lost Target Warning) - dotyczy obiektu zgubionego ze
śledzenia (z wyjątkiem obiektów będących poza zasięgiem pracy radaru), wskazując jego
ostatnią pozycję na ekranie (symbol: tab. 3.1 pkt. 9).
Ponadto urządzenia generują dodatkowe alarmy systemowe, które mają za zadanie ułatwić
wykorzystanie niektórych funkcji urządzenia lub przekazać odpowiedni komunikat o stanie jego
pracy. Z punktu widzenia nawigatora na pewno są one pomocne zarówno w normalnej eksploatacji jak
i w sytuacji awaryjnej. Można do nich zaliczyć:
Alarm braku sygnałów wejściowych (Loss of Sensor Input Alarm) - aby urządzenie ARPA
mogło być wykorzystywane prawidłowo musi otrzymywać pewne informacje z urządzeń
zewnętrznych. Do takich sygnałów należą m.in. informacja o prędkości oraz o kursie statku.
Jeśli sygnały z logu lub żyrokompasu nie będą odbierane, zostanie włączony odpowiedni
alarm. Należy pamiętać, że możliwy jest do zasygnalizowania fakt braku sygnału
pochodzącego z zewnątrz, a nie jego błędne wskazanie. Sygnalizacja błędnych wskazań
sensorów na podstawie testów jakości pomiarów może mieć miejsce jedynie w przypadku
wystąpienia nagłego błędu po okresie dobrej pracy urządzenia. Jednak w przypadku stałego
błędnego wskazania wartości sygnału (np. prędkości) od początku pracy urządzenia, błąd taki
nie zostanie wykryty. Brak odpowiedniego sygnału wejściowego może być spowodowany
uszkodzeniem danego urządzenia lub jego połączenia z ARPA. W niektórych przypadkach
(np. uszkodzenie logu lub żyrokompasu) operator ma możliwość wprowadzenia odpowiednich
danych ręcznie. Należy jednak wówczas stale pamiętać o uaktualnianiu danych po każdym
manewrze statku własnego. Jest to więc rozwiązanie połowiczne, z którego można korzystać
do czasu usunięcia powstałego uszkodzenia.
Alarm wprowadzenia zbyt dużej ilości ech do śledzenia (Tracks Full, Overload) - urządzenie
ARPA ma możliwość śledzenia określonej, maksymalnej liczby obiektów w związku z tym
próba wprowadzenia kolejnego obiektu gdy wszystkie kanały śledzenia są już wykorzystane
spowoduje włączenie alarmu przepełnienia systemu. Sytuacja taka może zaistnieć przy
żegludze w rejonie o dużej gęstości ruchu. Operator powinien wówczas przeanalizować
jeszcze raz sytuację i zdecydować, które obiekty są bardziej bezpieczne i można je skasować,
a następnie wprowadzić do śledzenia obiekt, który go interesuje i może być bardziej
niebezpieczny. W przypadku stosowania akwizycji automatycznej powinien także
odpowiednio dostosować jej obszar.
Alarm kolizyjny w czasie manewru próbnego (Trial Collision Warning) - Alarm ten związany
jest z wykorzystaniem funkcji manewru próbnego. Jego działanie jest takie samo jak
opisanego wcześniej alarmu kolizyjnego (Collision Warning). Dotyczy on jednak nowych,
określonych przez operatora parametrów ruchu statku własnego, ale pod uwagę brane są te
same graniczne nastawy CPA
LIMIT
i TCPA
LIMIT
. W przypadku, gdy planowana zmiana kursu
lub prędkości statku własnego spowoduje przekroczenie obu limitów, zostanie włączony
alarm kolizyjny w czasie próby. Obiekt zostanie oznaczony odpowiednim symbolem, a na
pulpicie może zostać włączony wskaźnik alarmu. Podstawowym zadaniem tego alarmu jest
więc przekazanie informacji o tym, że planowany manewr jest niebezpieczny, gdyż nie
spełnia kryteriów ustalonych wcześniej przez operatora.
Alarm upływu ustalonego opóźnienia planowanego manewru (Time to Manoeuvre Alarm) -
Również ten alarm związany jest z wykorzystaniem funkcji manewru próbnego. Jeśli zostało
zaplanowane opóźnienie manewru (Delay, TTM) to włączenie alarmu będzie wskazywało
oficerowi, że powinien wykonać zaplanowany alarm, gdyż czas ustalonego opóźnienia
dobiega już końca.
Kasowanie obiektów ze śledzenia
Nieodłączną funkcją związaną ze śledzeniem obiektów jest usuwanie ze śledzenia tych
obiektów, które zostały już bezpiecznie wyminięte i oddalają się. Dzięki temu istnieje możliwość
akwizycji nowych obiektów pojawiających się w zakresie pracy radaru. Kasowanie może odbywać się
ręcznie (przez naprowadzenie znacznika na dane echo i wydanie odpowiedniej komendy (Erase,

~ 15 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Cancel, Delete) lub automatycznie (po osiągnięciu przez echo określonych parametrów np. zadanej
odległości od statku własnego).
Przy ręcznym kasowaniu echa należy zwrócić uwagę na to czy właściwe echo zostało wybrane
do skasowania. Po błędnym skasowaniu innego echa trzeba będzie ponownie przeprowadzić jego
akwizycję i czekać na wypracowanie jego dokładnych danych.
Niektóre z urządzeń ARPA posiadają dodatkową funkcję pozwalającą na skasowanie
wszystkich śledzonych obiektów (np. RASCAR firmy SPERRY), a w innych nie możliwe jest
skasowanie ech niebezpiecznych, które powodują włączenie alarmu kolizyjnego (np. urządzenia firmy
KELVIN HUGHES).
PRZEBIEG ĆWICZENIA
Charakterystyka akwenu:
Ćwiczenia odbywają się na akwenie otwartym.
Warunki hydrometeorologiczne:
Widzialność: ograniczona.
Prąd: brak.
Wiatr: brak.
Model statku:
Nazwa: drobnicowiec uniwersalny M/V NEO
Szczegółowe dane wykorzystywanego modelu statku zostały zamieszczone w załączniku nr 6.
Charakterystyka przebiegu ćwiczenia:
Ćwiczenia są realizowane niezależnie na wszystkich mostkach nawigacyjnych tzn. statki własne
nie są nawzajem widoczne na ekranach radarów znajdujących się na pozostałych stanowiskach.
Przed uruchomieniem ćwiczenia należy włączyć urządzenie ARPA i dokonać właściwej
regulacji.
W trakcie ćwiczenia należy:
1. Przeprowadzić ręczną akwizycję widocznych na ekranie radaru obiektów.
2. Po wyświetleniu i stabilizacji wektorów należy dokonać interpretacji zobrazowania
wektorowego (wektory rzeczywiste i względne) pod kątem bezpieczeństwa jednostki własnej.
3. W przypadku wykrycia sytuacji niebezpiecznej należy określić i wykonać manewr
zapobiegawczy w celu wyminięcia śledzonych jednostek w odległości podanej przez
prowadzącego ćwiczenia.
4. Po wykonanym manewrze należy skontrolować jego skuteczność.
5. Zaplanować i wykonać manewr powrotny do wyjściowych parametrów ruchu statku
własnego.
6. Skasować obiekty ze śledzenia.
WARUNKI ZALICZENIA
Warunkiem zaliczenia ćwiczenia jest wykazanie się właściwym przygotowaniem teoretycznym
oraz prawidłowe wykorzystanie omawianych funkcji urządzeń ARPA.
EFEKTY KSZTAŁCENIA REALIZOWANE W TRAKCIE ĆWICZENIA
EK2:
Potrafi w sposób efektywny wykorzystywać systemy radarowe z automatycznym
śledzeniem ech do pozyskiwania i analizy informacji o sytuacji kolizyjnej oraz podejmuje właściwe
i skuteczne decyzje antykolizyjne i nawigacyjne.

~ 16 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
INFORMACJE DODATKOWE
Opis włączenia i wykorzystania omawianych w trakcie ćwiczenia funkcji urządzeń ARPA
zawarty został w załącznikach zamieszczonych na końcu instrukcji do ćwiczeń:
ARPA Nucleus HR 6000
– zał. 2
ARPA Concept HR 3061
– zał. 3
ARPA DB 7
– zał. 4
ARPA DB 2000
– zał. 5
~ 17 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
4. ĆWICZENIE NR 2
TEMAT:
Funkcja automatycznej akwizycji oraz historii ruchu obiektów – ćwiczenia na
akwenie otwartym w warunkach ograniczonej widzialności.
CEL I ZAKRES ĆWICZENIA
Celem ćwiczenia jest zapoznanie się z możliwościami, ograniczeniami oraz sposobami
wykorzystania funkcji automatycznej akwizycji obiektów oraz funkcjami umożliwiającymi
prezentację ruchu przeszłego obiektów, a także dalsze doskonalenie umiejętności prawidłowej
interpretacji informacji o śledzonych obiektach podczas realizacji scenariuszy nawigacyjnych na
akwenie otwartym.
CZĘŚĆ TEORETYCZNA
Funkcja automatycznej akwizycji obiektów
Automatyczna akwizycja polega na tym, że każde echo, które nie zostało wcześniej poddane
akwizycji i znajdzie się w obrębie obszaru wyznaczonego przez operatora, zostanie automatycznie
wykryte i wprowadzone do śledzenia. W chwili obecnej obszar automatycznej akwizycji zostaje
zwykle ograniczony jedynie do pewnych stref, odpowiednio usytuowanych wokół statku własnego
i z nim związanych. Można tu wyróżnić dwa rodzaje takich stref. Jest to tzw. obszar automatycznej
akwizycji i kręgi bezpieczeństwa.
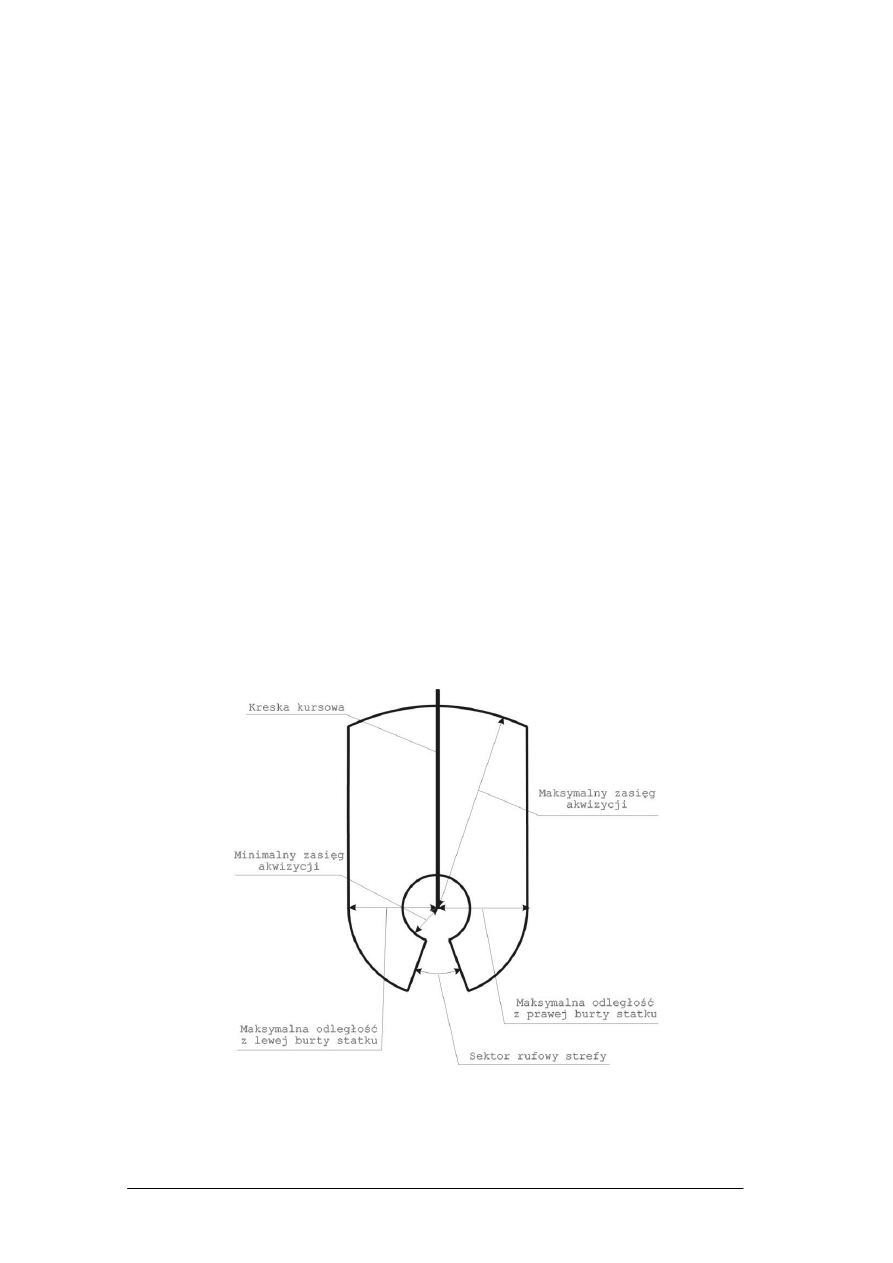
Pierwszy typ automatycznej akwizycji polega na określeniu przez operatora, przez wybór
dostępnych parametrów, rozmiaru strefy chronionej (urządzenia DB-7 i DB-2000). Przykładowy jej
kształt pokazany jest na rys. nr 4.1.
Rys. 4.1. Strefa automatycznej akwizycji wykorzystywana w urządzeniach firmy Norcontrol (DB 7
i DB 2000).
~ 18 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Parametrami, których wartość może ustalić operator są:
maksymalny zasięg akwizycji
minimalny zasięg akwizycji
sektor rufowy strefy
maksymalna odległość z prawej burty statku
maksymalna odległość z lewej burty statku.
Jeśli nie poddane akwizycji echo będzie wykryte wewnątrz tak określonego obszaru, zostanie
włączony alarm New Target Warning i zostanie ono w widoczny sposób oznaczone na ekranie
(symbol: tab. 3.1 pkt. 7). Rozpocznie się automatyczne śledzenie nowego obiektu. Po potwierdzeniu
alarmu przez operatora symbol oznaczający nowe echo zniknie i śledzenie będzie kontynuowane.
Jednocześnie sprawdzana jest liczba już śledzonych obiektów i jeśli okaże się, że wszystkie
kanały śledzenia są już wykorzystywane (śledzona jest już maksymalna liczba ech) zostanie włączony
alarm przepełnienia systemu i strefa automatycznej akwizycji zostanie wyłączona. Aby włączyć ją
ponownie należy skasować niektóre echa ze śledzenia i ograniczyć rozmiary obszaru, który ona
obejmuje. W przeciwnym przypadku, po ponownym uaktywnieniu tej funkcji, sytuacja wyłączenia
strefy po przekroczeniu dopuszczalnej liczby śledzonych ech powtórzy się.
Dodatkową funkcją stosowaną przy tego typu akwizycji jest możliwość ustawienia czułości
wykrywania nowego obiektu. Należy zwrócić uwagę aby nie była ona zbyt mała (możliwość
pominięcia echa słabego), ani zbyt wysoka (wprowadzanie zakłóceń jako obiektów nadających się do
śledzenia).
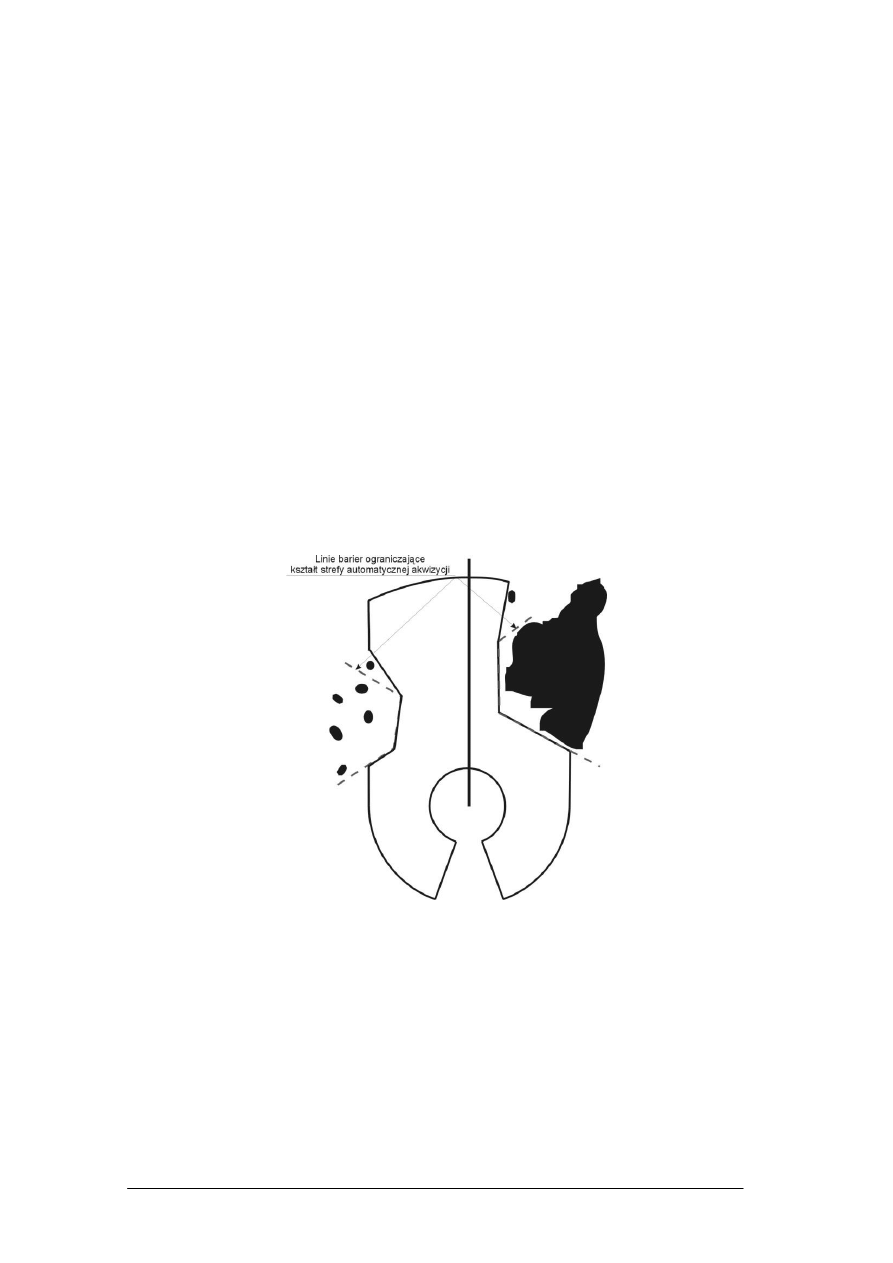
Rys. 4.2. Funkcja barriers ograniczająca obszar działania strefy automatycznej akwizycji.
W celu zabezpieczenia strefy przed wprowadzaniem do śledzenia dużej liczby nowych obiektów
i w efekcie przepełnienia systemu, istnieje możliwość wprowadzenia linii dodatkowo zmieniających
ustalony wcześniej kształt obszaru chronionego. Linie takie (barriers) mają tę właściwość, że
wszystkie elementy obrazu radarowego znajdującego się poza nimi nie są brane pod uwagę i nie
obciążają pamięci komputera (rys. 4.2.0. Na akwenach gdzie występuje znos statku operator powinien
dokonać stabilizacji obrazu radarowego względem dna, co zabezpieczy linie barier przed ich
przesuwaniem się na ekranie radaru względem ech stałych. Zastosowanie linii barier pozwala na
użycie funkcji automatycznej akwizycji również na akwenach przybrzeżnych do ograniczenia
obszarów, na których obserwowane są echa od lądu, kotwicowiska, skupiska łodzi rybackich itp., bez
konieczności zmniejszania zasięgu działania strefy. Oczywiście zgodnie z przepisami IMO taka
modyfikacja strefy automatycznej akwizycji powinna być odpowiednio pokazana na ekranie.
~ 19 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
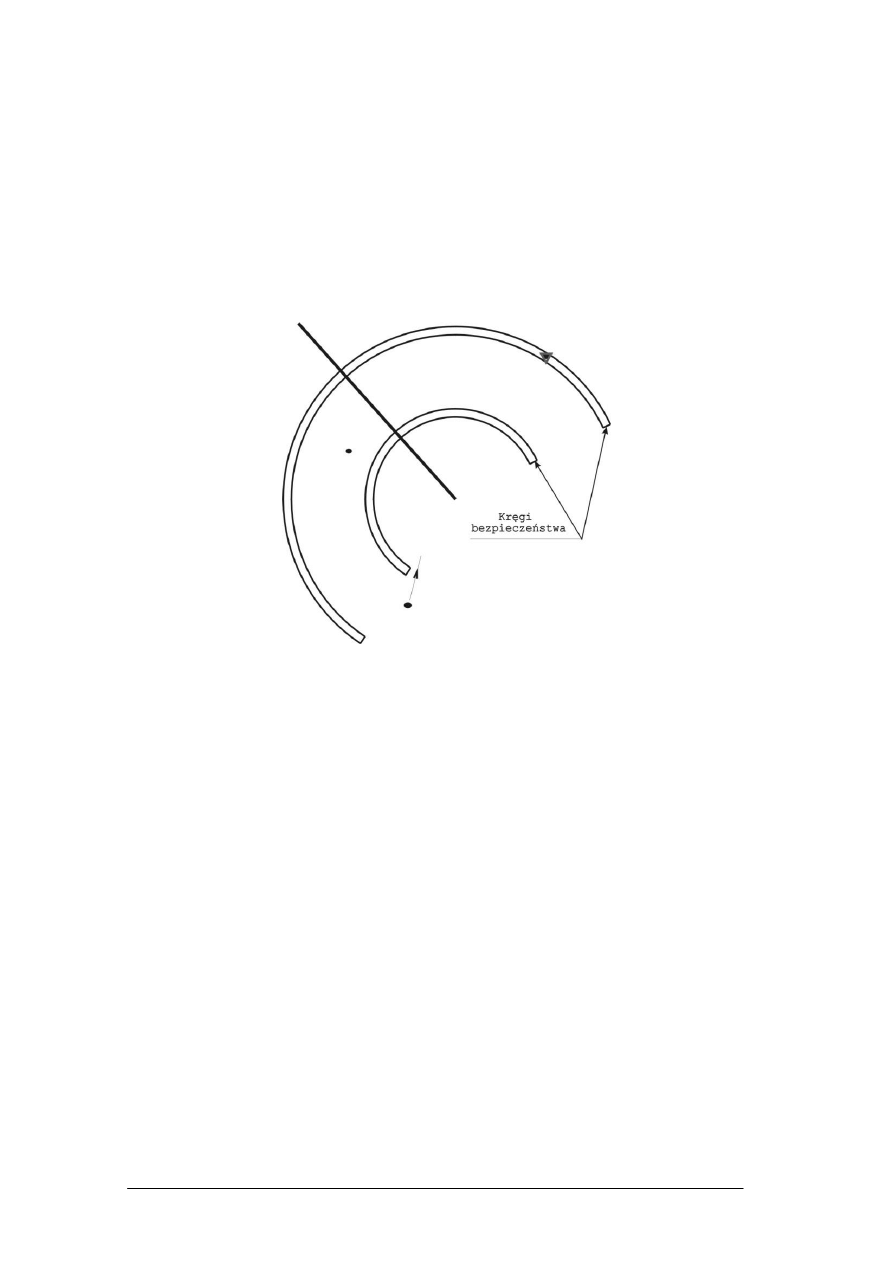
Drugi typ stref automatycznej akwizycji to tzw. kręgi bezpieczeństwa (Guard Rings, Guard
Zones), które mogą być określone przez kąt, w jakim są wyświetlane oraz odległość od statku
własnego.
Kąt ten zwykle określa się w odniesieniu do dziobu statku i przy zmianie kursu kręgi akwizycji
również zmieniają swoje położenie. Zwykle stosowane są dwa kręgi o określonej szerokości (ok. 0.5-
1.5 Mm), przy czym jeden z nich może być wyświetlany na zadanej odległości lub można tą odległość
regulować dla obydwu kręgów oddzielnie. Jeśli nowe echo znajdzie się wewnątrz jednego
z ustawionych kręgów, zostanie włączony alarm New Target Warning i echo zostanie w widoczny
sposób oznaczone na ekranie. Rozpoczyna się automatyczne śledzenie nowego obiektu.
Rys. 4.3. Funkcja automatycznej akwizycji realizowana w formie kręgów bezpieczeństwa.
Kręgi powinny być ustawione w takich odległościach od statku, aby zapewnić zarówno wczesne
wykrycie obiektów (krąg zewnętrzny), a także zabezpieczyć się przed możliwością pojawienia się ech
od obiektów małych bez ich wykrycia (krąg wewnętrzny). Należy również zwrócić uwagę na to, aby
krąg wewnętrzny nie zachodził na echa od fal, gdyż może to powodować ciągłe włączanie alarmu New
Target Warning. Użycie kręgów automatycznej akwizycji przedstawia rys. 4.3.
Sztuczna poświata (Trails, Afterglow) i historia ruchu obiektów (History, Past Positions)
Jedną z charakterystycznych cech wskaźnika z tradycyjną lampą radaroskopową była poświata
widoczna za poruszającymi się echami, spowodowana wydłużonym czasem świecenia luminoforu.
Zastosowanie nowych rozwiązań do obróbki obrazu radarowego oraz wskaźników typu raster-scan
poprawiło jego jakość ale jednocześnie w sposób naturalny została wyeliminowana poświata,
wskazująca ruch echa.
Wadę tą eliminuje zastosowanie w urządzeniach sztucznie generowanej poświaty,
reprezentującej drogę widocznego na ekranie obiektu. Zaletą takiego rozwiązania jest możliwość
ustawienia długości prezentowanych tras (Trails Time). Są one przedstawiane dla wszystkich
widocznych na ekranie obiektów niezależnie od tego czy poddano je akwizycji. Można wykorzystać tę
funkcję zarówno przy zobrazowaniu ruchu rzeczywistego jak i względnego. W pierwszym przypadku
łatwo jest zauważyć manewr obiektu (zwłaszcza zmiany kursu), a w drugim przeprowadzić selekcję
obiektów niebezpiecznych, które w pierwszej kolejności powinny być śledzone. Rodzaj wyświetlanej
aktualnie poświaty związany jest z reguły z aktualnie używanym rodzajem zobrazowania.
W starszych typach radarów wadą tego rozwiązania było związanie tak prezentowanej
informacji z aktualnie używanym zakresem, gdyż po przełączeniu zakresu poświata musi zostać

~ 20 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
zbudowana od zera do określonej przez operatora długości. Konieczność częstej zmiany zakresów
w określonej sytuacji nawigacyjnej utrudniało wykorzystanie omawianej funkcji. Wadę tą
wyeliminowały wymagania Rezolucji MSC.192(97). Zgodnie z nimi informacja w postaci
wyskalowanej poświaty lub pozycji historii ruchu obiektów lub oba typy prezentacji powinny być
obsługiwane i możliwe do zaprezentowania na ekranie w ciągu 2 skanowań lub równoważnego czasu
w następujących sytuacjach:
zmniejszenia lub zwiększenia zakresu o jeden;
przesunięcia lub reset pozycji obrazu radarowego;
zmiany między poświatami rzeczywistymi i względnymi.
Kolejną wadą funkcji poświaty wydaje się być również trudność wykrycia manewru zmiany
prędkości obiektu mimo zastosowania zmiennego wyglądu poświaty w zależności od czasu jej
wyświetlania. Zastosowanie poświaty podczas żeglugi w małych odległościach od lądu (przy
zobrazowaniu ruchu względnego) spowoduje natomiast znaczne zamazanie obrazu radarowego, gdyż
widoczna będzie także poświata pochodząca od lądu. Również wszelkie zakłócenia pojawiające się na
ekranie (echa od fal i opadów) powodują zaciemnienie obrazu radarowego.
Inną funkcją umożliwiającą prezentację ruchu przeszłego obiektów jest historia ruchu obiektów
śledzonych. Zgodnie z wymogami IMO, każde urządzenie ARPA powinno mieć możliwość
prezentacji przeszłego ruchu obiektów, w postaci przynajmniej 4 równoodległych w czasie przeszłych
pozycji ech. Wymagania te są dosyć ogólne i wiele firm stosuje różne metody prezentacji pozycji
przeszłych obiektów.
W wielu urządzeniach w zależności czy funkcja zostanie włączona przy zobrazowaniu
rzeczywistym czy też względnym, na ekranie radaru obserwator może otrzymać zbiór pozycji
reprezentujących odpowiednio drogę rzeczywistą lub względną echa (oczywiście jeśli oba rodzaje
prezentacji drogi przeszłej są dostępne). W nowych typach urządzeń daje się jednak zauważyć
tendencję powiązania rodzaju pozycji przeszłych z rodzajem aktualnie prezentowanych wektorów.
Z punktu widzenia wykorzystania tej funkcji wydaje się, że większe znaczenie ma historia drogi
rzeczywistej obiektu, gdyż bardzo szybko można zorientować się, czy obiekt wykonał manewr i jaki
był jego charakter. Przy tym rodzaju pozycji przeszłych ich obserwacja daje jednoznaczną odpowiedź
jaka była zmiana kursu (zmiana kierunku ułożenia pozycji) lub prędkości (zagęszczenie lub
rozrzedzenie pozycji na stałym kursie) lub obu tych parametrów jednocześnie. W przypadku
wyświetlania historii względnej obiektu, który wykonał manewr, możemy jedynie stwierdzić, że taki
fakt miał miejsce. Trudno jest natomiast określić jaki to był manewr.
Następnym problemem związanym z tą funkcją, jest odstęp czasu między kolejnymi pozycjami.
W większości urządzeń operator ma możliwość zmiany odstępu czasu (np. co 1 minutę) lub wyboru
jednej z dwóch lub kilku wartości (np. 1,5 lub 3 min.).
Należy pamiętać także i o tym, że obiekt śledzony krótko (poniżej całkowitego okresu czasu
reprezentowanego przez wszystkie pozycje przeszłe echa) nie będzie miał wyświetlanych wszystkich
pozycji, ale mniejszą ich liczbę, a pozostałe będą dopiero dostawiane w miarę wydłużania się czasu
śledzenia tego echa (rys. 4.4.).
W większości urządzeń aktywacja funkcji historii ech, powoduje wyświetlenie pozycji
przeszłych dla wszystkich obiektów jednocześnie. Powoduje to zaciemnienie sytuacji widocznej na
ekranie (zwłaszcza, gdy śledzona jest większa liczba obiektów). Z tego powodu powinna ona zostać
wyłączona po wykorzystaniu uzyskanej informacji. Niektóre urządzenia ARPA (np. DB-7, DB-2000)
pozwalają na wyświetlenie historii ruchu dla wybranego jednego lub kilku obiektów. Wydaje się to
rozwiązaniem bardziej szczęśliwym, gdyż operator z reguły orientuje się, którego echa ruch chciałby
prześledzić i selektywnie może je wybrać.
~ 21 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Rys. 4.4. Wykorzystanie funkcji historii ruchu rzeczywistego śledzonych obiektów.
Jak widać omawiana funkcja może być w danym urządzeniu realizowana w bardzo różny
sposób. Dlatego historię należy obserwować z dużą uwagą, aby zorientować się dokładnie, w jaki
sposób jest ona prezentowana na urządzeniu, którym się posługujemy.
PRZEBIEG ĆWICZENIA
Charakterystyka akwenu:
Ćwiczenia odbywają się na akwenie otwartym.
Warunki hydrometeorologiczne:
Widzialność: ograniczona.
Prąd: brak.
Wiatr: brak.
Model statku:
Nazwa: drobnicowiec uniwersalny M/V NEO
Szczegółowe dane wykorzystywanego modelu statku zostały zamieszczone w załączniku nr 6.
Charakterystyka przebiegu ćwiczenia:
Ćwiczenia są realizowane niezależnie na wszystkich mostkach nawigacyjnych tzn. statki własne
nie są nawzajem widoczne na ekranach radarów znajdujących się na pozostałych stanowiskach.
Przed uruchomieniem ćwiczenia należy włączyć urządzenie ARPA i dokonać właściwej
regulacji.
W trakcie ćwiczenia należy:
1. Włączyć funkcje automatycznej akwizycji w sposób umożliwiający jej wykorzystanie dla
określonej sytuacji nawigacyjnej.
2. Echa obiektów znajdujących się poza obszarem automatycznej akwizycji poddać akwizycji
ręcznej.
3. Po wyświetleniu i stabilizacji wektorów należy dokonać interpretacji zobrazowania
wektorowego (wektory rzeczywiste i względne) pod kątem bezpieczeństwa jednostki własnej
ze szczególnym uwzględnieniem generowanych alarmów.
4. Włączyć funkcje historii ruchu obiektów oraz sztucznej poświaty oraz dokonać dostępnych
dla danego urządzenia regulacji i właściwie interpretować uzyskiwane informacje o
manewrach obiektów.
5. W przypadku wykrycia sytuacji niebezpiecznej należy określić i wykonać manewr
zapobiegawczy w celu wyminięcia śledzonych jednostek w odległości podanej przez
prowadzącego ćwiczenia.
6. Po wykonanym manewrze należy skontrolować jego skuteczność.

~ 22 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
7. W przypadku wykrycia sytuacji niebezpiecznej należy dokonać analizy sytuacji i jeśli istnieje
taka potrzeba należy zaplanować i wykonać manewr zapobiegawczy w celu wyminięcia
śledzonych jednostek w odległości podanej przez prowadzącego ćwiczenia. W trakcie
wykonywanych manewrów należy obserwować zachowanie się obszarów automatycznej
akwizycji i dokonywać korekty ich ustawienia.
8. Skasować obiekty ze śledzenia.
WARUNKI ZALICZENIA
Warunkiem zaliczenia ćwiczenia jest wykazanie się właściwym przygotowaniem teoretycznym
oraz prawidłowe wykorzystanie omawianych funkcji urządzeń ARPA.
EFEKTY KSZTAŁCENIA REALIZOWANE W TRAKCIE ĆWICZENIA
EK2:
Potrafi w sposób efektywny wykorzystywać systemy radarowe z automatycznym
śledzeniem ech do pozyskiwania i analizy informacji o sytuacji kolizyjnej oraz podejmuje właściwe
i skuteczne decyzje antykolizyjne i nawigacyjne.
INFORMACJE DODATKOWE
Opis włączenia i wykorzystania omawianych w trakcie ćwiczenia funkcji urządzeń ARPA
zawarty został w załącznikach zamieszczonych na końcu instrukcji do ćwiczeń:
ARPA Nucleus HR 6000
– zał. 2
ARPA Concept HR 3061
– zał. 3
ARPA DB 7
– zał. 4
ARPA DB 2000
– zał. 5

~ 23 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
5. ĆWICZENIE NR 3
TEMAT:
Planowanie manewrów zapobiegawczych z użyciem funkcji manewru
próbnego (TRIAL), dokładność planowania – ćwiczenia na akwenie otwartym
w warunkach ograniczonej widzialności przy dużym natężeniu ruchu statków.
CEL I ZAKRES ĆWICZENIA
Celem ćwiczenia jest zapoznanie się z możliwościami, ograniczeniami oraz sposobami wykorzystania
funkcji manewru próbnego.
CZĘŚĆ TEORETYCZNA
Charakterystyka funkcji manewru próbnego
Zgodnie z wymogami Rezolucji MSC.192(97) system powinien umożliwić symulację
przewidywanych efektów manewru statku własnego w potencjalnie niebezpiecznej sytuacji i powinien
uwzględniać charakterystykę dynamiki statku własnego. Symulacja manewru próbnego powinna
zostać wyraźnie wskazana. Wymagania są następujące:
powinna być możliwa symulacja zmian kursu i prędkości statku własnego;
powinna być dostępna symulacja czasu do rozpoczęcia manewru wraz z jego odliczaniem.
w czasie symulacji, śledzenie obiektów powinno być kontynuowane i aktualne dane obiektów
powinny być wyświetlane.
Manewr próbny powinien być dostępny dla wszystkich śledzonych obiektów i przynajmniej
wszystkich aktywnych obiektów AIS.
Zmiany w wymaganiach dotyczą przede wszystkim wprowadzenia obowiązku uwzględnienia
dynamiki statku własnego podczas planowania manewru. Ponieważ dla urządzeń produkowanych
przed 2008 rokiem nie było tak jednoznacznego wymogu, w dalszej części charakterystyki omówiona
zostanie także opcja planowania statycznego manewru statku własnego (spotykana szczególnie w
starszych typach urządzeń).
Tak więc funkcja manewru próbnego powinna zapewnić możliwość symulacji wpływu
planowanego manewru statku własnego na parametry zbliżenia śledzonych obiektów bez przerywania
procesu śledzenia i uaktualniania informacji. Jej głównym celem jest ocena stopnia jego
bezpieczeństwa w stosunku do śledzonych obiektów. Fakt włączenia funkcji manewru próbnego
powinien być w widoczny sposób zasygnalizowany na ekranie, przez wyświetlenie na ekranie
wymaganego symbolu (od Rezolucji A.823(19) jest to symbol w postaci litery T). Informacja ta jest
o tyle istotna, że nawigator musi wiedzieć, iż sytuacja widoczna na ekranie nie jest sytuacją
rzeczywistą lecz wynika z planowanego manewru, który może być dopiero wykonany w przyszłości.
Funkcja manewru próbnego pozwala wyznaczyć taką wartość zmiany kursu lub/i prędkości,
która pozwoli w sposób optymalny rozwiązać sytuację kolizyjną, nawet przy dużym natężeniu ruchu.
Ponieważ przy planowaniu manewru zakłada się, że obserwowane obiekty nie będą
manewrować (podobnie jak czyni się przy rozwiązywaniu tego problemu na nakresie), najwięcej
informacji będzie można uzyskać przy obserwacji zobrazowania względnego. Podczas zmiany
parametrów ruchu statku własnego, będzie można zaobserwować zmianę położenia wektorów
względnych śledzonych obiektów. Płynna zmiana tych parametrów pozwoli na wybór manewru
optymalnego, tzn. takiego, który umożliwi bezpieczne minięcie się ze wszystkimi obiektami (wektory
względne obiektów powinny znaleźć się w odległości uznawanej za bezpieczną dla naszego statku).
Przy prezentacji wektorów względnych obiektów (w celu łatwiejszej i bardziej precyzyjnej oceny
skutków planowanego manewru) na ekranie radaru mogą zostać wyświetlone stałe kręgi odległości
lub ruchomy krąg odległości dla wymaganego bezpiecznego CPA. W celu ułatwienia operatorowi

~ 24 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
możliwości przybliżonej oceny koniecznego do wykonania manewru antykolizyjnego może być
zastosowane wyświetlenie wektora ruchu rzeczywistego statku własnego, mimo, że na ekranie
włączony jest ruch względny (np. urządzenia firmy KELVIN HUGHES). Każdej zmianie parametrów
ruchu statku własnego będzie wówczas odpowiadać zmiana kierunku lub długości jego wektora
rzeczywistego. Oczywiście dokładne dane o tak wypracowanym kursie czy prędkości wyświetlane są
na wskaźniku w postaci alfanumerycznej.
W przypadku wykorzystywania funkcji manewru próbnego w zobrazowaniu ruchu
rzeczywistego należy pamiętać o tym, iż ocena uzyskiwanej odległości minięcia się ze śledzonymi
obiektami nie jest tak jednoznaczna jak w przypadku ruchu względnego. Planowany manewr powinien
być taki, aby koniec wektora rzeczywistego statku własnego znajdował się w wystarczająco dużej
odległości od końców wektorów rzeczywistych śledzonych obiektów. Może zdarzyć się jednak tak, że
do pełnej oceny skuteczności manewru konieczna będzie zmiana długości czasowej wektorów,
zwłaszcza w stosunku do statków poruszających się kursami zbieżnymi.
W niektórych urządzeniach ARPA istnieje możliwość uzyskania dodatkowej dokładnej
informacji o zmianie CPA i TCPA wskazanego przez obserwatora obiektu. W miejscu gdzie
normalnie możliwy jest odczyt meldunku radarowego obiektów, pojawiają się tzw. Trial target data,
czyli meldunek radarowy kalkulowany dla założonych zmian kursu i prędkości statku własnego.
(rozwiązanie takie stosowane jest np. w urządzeniach firm NORCONTROL). Funkcja ta jest
szczególnie użyteczna w przypadku konieczności testowania manewru zapobiegawczego
w zobrazowaniu ruchu rzeczywistego. Bardzo pomocne jest też stosowane funkcji alarmu kolizyjnego
w trakcie próby (Trial Collision Warning), oraz wygaszanie lub generowanie symbolu echa
niebezpiecznego dla obiektów, dla których wyliczone nowe (wynikające z planowanego manewru)
wartości CPA i TCPA są mniejsze od limitów ustawionych przez operatora.
Podczas testowania skutków planowanego manewru zakłada się niezmienność parametrów
ruchu obiektów, jednak proces śledzenia obiektów nie jest przerywany i wszelkie rzeczywiste zmiany
prędkości lub kursu zostaną wykryte i odpowiednio uwzględnione na ekranie i w wyświetlonych
meldunkach radarowych.
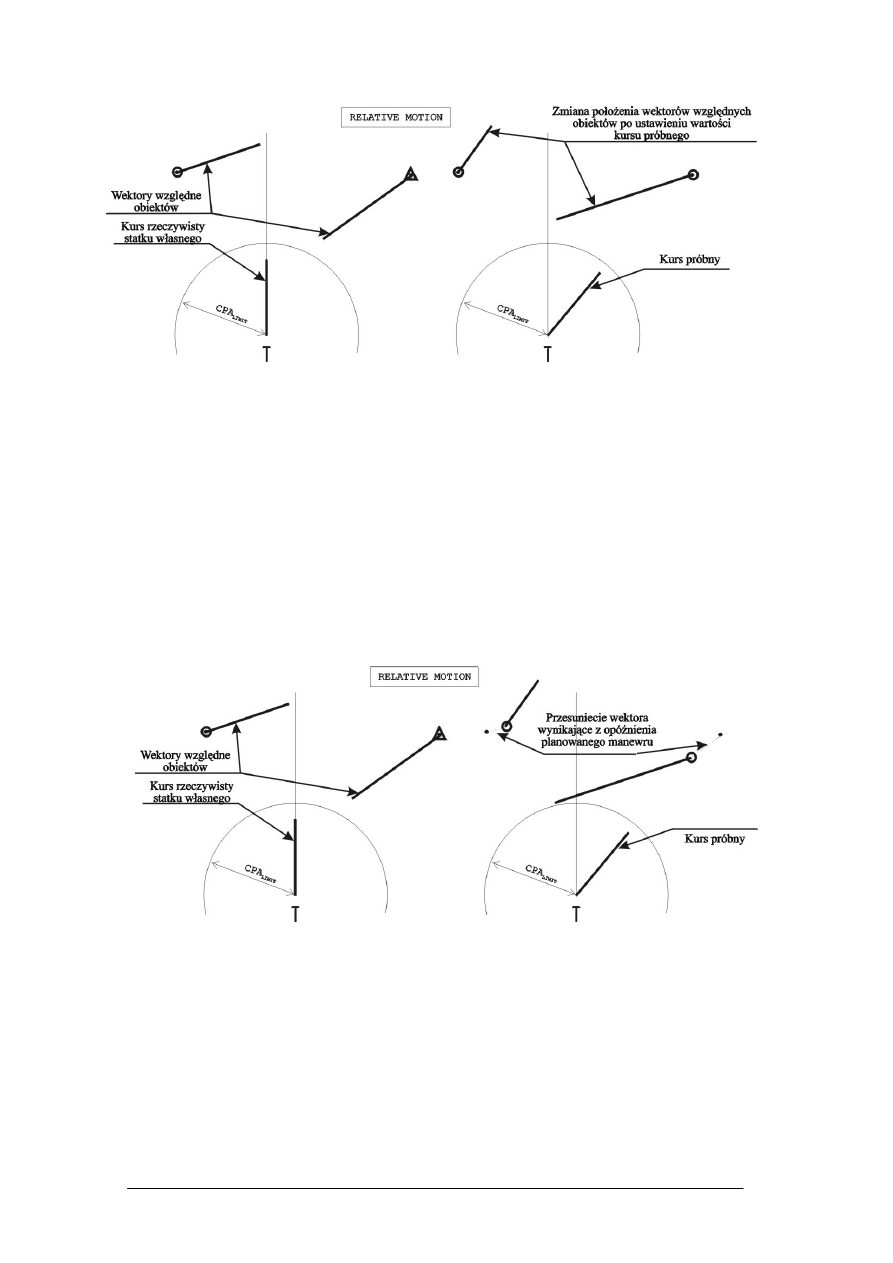
Najprostszym stosowanym rozwiązaniem jest testowanie manewru próbnego bez uwzględnienia
charakterystyki manewrowej statku oraz wprowadzenia opóźnienia czasowego w wykonaniu
planowanego manewru. Takie statyczne przedstawienie sytuacji stosowane jest m.in. w podstawowej
wersji urządzenia RASCAR firmy SPERRY. Operator ma tu możliwość wyboru jedynie nowego
kursu i/lub prędkości, a zaplanowany manewr powinien wykonać natychmiast po ustaleniu, że spełnia
on kryteria bezpieczeństwa. Sytuację przed i po zaplanowaniu manewru zapobiegawczego
przedstawia rysunek nr 5.1.
Pamiętając o tym, że praktycznie manewr taki nie może zostać wykonany natychmiast i znając
charakterystyki manewrowe statku własnego, nawigator powinien uwzględniać je przy planowaniu
akcji zapobiegawczej, odpowiednio interpretując otrzymane wyniki. Przydatna jest tutaj znajomość
teorii wykonywania nakresów radarowych. Dzięki temu może on uwzględnić to, że otrzymana wartość
szybkości bezpiecznej jest faktycznie średnią wartością prędkości w czasie wykonywania manewru
i dlatego należało by ją zmniejszyć lub zwiększyć bardziej niż wynika tylko z planowania manewru.
Sam manewr powinien być wykonany możliwie szybko. Mniejsze różnice występują przy planowaniu
zmiany kursu, gdyż manewr ten przebiega szybciej. Konieczna jednak może okazać się np. nieco
większa (niż zostało to wcześniej zaplanowane) wartość zwrotu, w celu utrzymania założonego CPA.
~ 25 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Rys. 5.1. Funkcja manewru próbnego – statyczna forma prezentacji sytuacji bez uwzględnienia opóźnienia
czasowego wykonania manewru.
Dodatkową opcją często dostępną przy sprawdzaniu manewru antykolizyjnego jest możliwość
wprowadzenia opóźnienia czasu rozpoczęcia planowanego manewru (Delay, Time To Manoeuvre -
TTM). Możliwość taka pozwala na przesunięcie całej obserwowanej sytuacji i zaplanowanie swojej
akcji dopiero od pewnego momentu w przyszłości. Obserwowane wektory zostają przesunięte
o odcinek równy drodze jaką przejechało by każde echo w tym czasie (rys. 5.2.). W przypadku
statycznej prezentacji sytuacji (gdy nie są uwzględnione parametry manewrowe statku własnego)
należy traktować takie opóźnienie jako czas konieczny na wykonanie zaplanowanego manewru
(podobnie jak w przypadku nakresów wykonywanych ręcznie) i rozpocząć zaplanowany manewr
wystarczająco wcześnie (w zależności od zdolności manewrowych statku własnego w danych
warunkach i wielkości samego manewru).
Rys. 5.2. Funkcja manewru próbnego – statyczna forma prezentacji sytuacji z uwzględnieniem opóźnienia
czasowego wykonania manewru.
~ 26 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
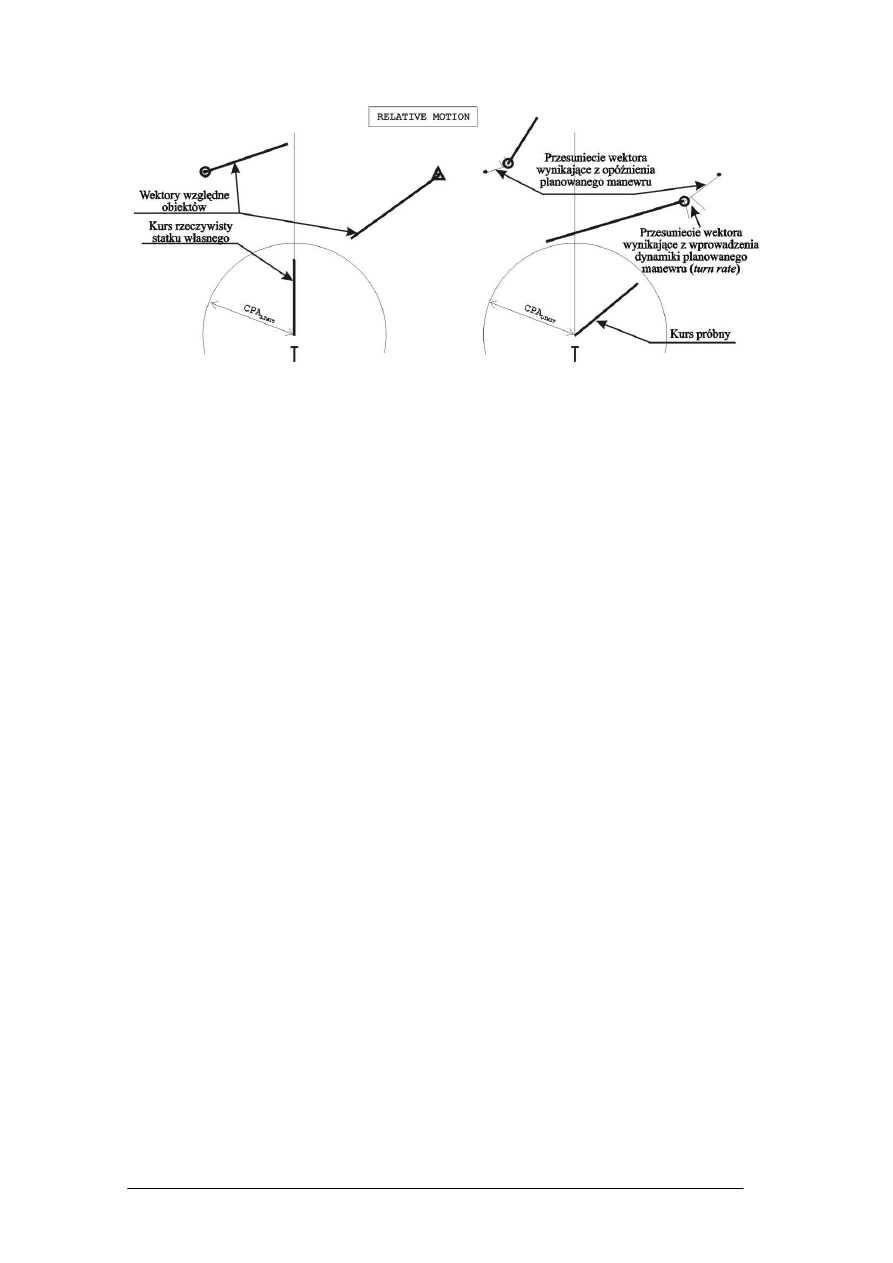
Rys. 5.3. Funkcja manewru próbnego – dynamiczna forma prezentacji sytuacji z uwzględnieniem opóźnienia
czasowego wykonania manewru.
Rozwinięciem omawianej funkcji jest możliwość uwzględnienia parametrów manewrowych
statku własnego (rys. nr 5.3.). Wyróżnić można następujące wielkości, które są uwzględniane przy
dynamicznym planowaniu manewru:
szybkość zmiany kursu statku (Turn rate), wyrażana w [o/min]
szybkość zmiany prędkości statku (Speed rate), wyrażana w [w/min]
opóźnienie w poruszaniu się po kursie wskazywanym przez żyrokompas (Course delay)
wyrażone w [s]; jest to wielkość rzadziej wykorzystywana w odróżnieniu od dwóch
pierwszych parametrów
promień zwrotu statku (Turn radius), wyrażany w [Mm]; jest ściśle związany z szybkością
zmiany kursu i przy wzroście jej wartości (szybszy zwrot), jego wartość maleje.
Najczęściej stosowane są dwa pierwsze parametry, mające największy wpływ na dokładność
planowania zwrotu. Uwzględnienie parametrów manewrowych statku własnego podczas planowania
akcji zapobiegawczej (nawet w tak ograniczonej formie) zwiększa dokładność tej funkcji.
W przypadku zastosowania dynamicznej formy prezentacji informacji na wskaźniku podczas
testowania skutków planowanego manewru istnieje także możliwość wprowadzenia czasu opóźnienia
jego rozpoczęcia (Delay time), lecz w odróżnieniu od prezentacji statycznej nie ma już potrzeby
wykonania manewru z wyprzedzeniem, gdyż uwzględniona jest droga statku własnego w czasie
wykonywania zaplanowanego manewru. Bardzo często przy tego typu prezentacji wprowadzony przez
operatora czas opóźnienia jest odliczany do zera (w tym czasie echa obiektów zbliżają się do
przesuniętych na ekranie wektorów), a sam manewr może być rozpoczęty w momencie, gdy
opóźnienie osiągnie wartość równą zeru.
Kończąc ogólne rozważania na temat wykorzystania i możliwości manewru próbnego należy
zwrócić uwagę na to, aby wykorzystywać go rozsądnie. Nie należy pozostawiać obrazu planowanej
próby zbyt długo na ekranie, gdyż nie jest to obraz rzeczywisty. Po zaplanowaniu akcji należy
wyłączyć funkcje manewru próbnego i wykonać wcześniej zaplanowany manewr.
Ograniczenia funkcji manewru próbnego
Przy planowaniu manewru antykolizyjnego z użyciem funkcji manewru próbnego należy
pamiętać, że funkcja ta posiada pewne ograniczenia i uwzględniać następujące dodatkowe czynniki:
a) ARPA nie uwzględnia przepisów MPDM; wskazując, że dany kurs lub prędkość są
bezpieczne w danej sytuacji nie odpowiada na pytanie czy manewr wykonany w celu ich
osiągnięcia jest zgodny z MPDM;

~ 27 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
b) informacje o przewidywanym rozwoju sytuacji można uzyskać jedynie dla obiektów
śledzonych;
c) statki, w stosunku do których nawigator podejmuje działanie, znajdują się na określonym
akwenie, na którym mogą manewrować, aby podążać wcześniej zaplanowaną trasą lub
uniknąć sytuacji kolizyjnej, a manewry te nie są uwzględniane w trakcie planowania
manewru własnego;
d) planowanie odbywa się z określoną dokładnością dlatego nawigator musi pamiętać o
zachowaniu wystarczająco dużego marginesu bezpieczeństwa;
e) w trakcie wykonywania wydatnego manewru zmiany kursu prędkość statku własnego
czasowo ulegnie zmniejszeniu, co trudno jest uwzględnić podczas symulacji manewru;
f) w określonej sytuacji nawigacyjnej statek własny może być zmuszony wykonać manewr, po
którym czasowo znajdzie się na kursie kolizyjnym z innym statkiem, aż do momentu
wykonania następnego manewru, np. powrotu na swój poprzedni kurs (zwłaszcza może to
dotyczyć statków znajdujących się w dużej odległości) dlatego ważna jest prawidłowa
interpretacja rozwoju sytuacji.
PRZEBIEG ĆWICZENIA
Charakterystyka akwenu:
Ćwiczenia odbywają się na akwenie otwartym.
Warunki hydrometeorologiczne:
Widzialność: ograniczona.
Prąd: brak.
Wiatr: brak.
Model statku:
Nazwa: drobnicowiec uniwersalny M/V NEO
Szczegółowe dane wykorzystywanego modelu statku zostały zamieszczone w załączniku nr 6.
Charakterystyka przebiegu ćwiczenia:
Ćwiczenia są realizowane niezależnie na wszystkich mostkach nawigacyjnych tzn. statki własne
nie są nawzajem widoczne na ekranach radarów znajdujących się na pozostałych stanowiskach.
Przed uruchomieniem ćwiczenia należy włączyć urządzenie ARPA i dokonać właściwej
regulacji.
W trakcie ćwiczenia należy:
1. Przeprowadzić ręczną akwizycję widocznych na ekranie radaru obiektów.
2. Po wyświetleniu i stabilizacji wektorów należy dokonać interpretacji zobrazowania
wektorowego (wektory rzeczywiste i względne) pod kątem bezpieczeństwa jednostki własnej
ze szczególnym uwzględnieniem generowanych alarmów.
3. W przypadku wykrycia sytuacji niebezpiecznej należy włączyć funkcje manewru próbnego,
zaplanować i wykonać manewr zapobiegawczy w celu wyminięcia śledzonych jednostek w
odległości podanej przez prowadzącego ćwiczenia.
4. Po wykonanym manewrze należy skontrolować jego skuteczność oceniając dokładność
planowania.
5. Korzystając z funkcji manewru próbnego zaplanować i wykonać manewr powrotny do
wyjściowych parametrów ruchu statku własnego.
6. Skasować obiekty ze śledzenia.
WARUNKI ZALICZENIA
Warunkiem zaliczenia ćwiczenia jest wykazanie się właściwym przygotowaniem teoretycznym
oraz prawidłowe wykorzystanie funkcji manewru próbnego oraz interpretacja uzyskiwanych
informacji.

~ 28 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
EFEKTY KSZTAŁCENIA REALIZOWANE W TRAKCIE ĆWICZENIA
EK2:
Potrafi w sposób efektywny wykorzystywać systemy radarowe z automatycznym
śledzeniem ech do pozyskiwania i analizy informacji o sytuacji kolizyjnej oraz podejmuje właściwe
i skuteczne decyzje antykolizyjne i nawigacyjne.
EK3:
Posiada umiejętność dowodzenia wachtą nawigacyjną, precyzyjnie wyznaczając zadania
członkom wachty oraz nadzorując prawidłowość ich wykonania.
INFORMACJE DODATKOWE
Opis włączenia i wykorzystania omawianych w trakcie ćwiczenia funkcji urządzeń ARPA
zawarty został w załącznikach zamieszczonych na końcu instrukcji do ćwiczeń:
ARPA Nucleus HR 6000
– zał. 2
ARPA Concept HR 3061
– zał. 3
ARPA DB 7
– zał. 4
ARPA DB 2000
– zał. 5

~ 29 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
6. ĆWICZENIE NR 4
TEMAT:
Sposoby określania całkowitego znosu statku, stabilizacja obrazu radarowego
względem wody i względem dna – ćwiczenia na akwenach przybrzeżnych z
wykorzystaniem urządzeń radarowych do nawigacji i unikania kolizji.
CEL I ZAKRES ĆWICZENIA
Celem ćwiczenia jest zapoznanie się z możliwością uzyskania informacji o znosie statku
własnego oraz stabilizacją obrazu radarowego względem dna na podstawie śledzenia echa obiektu
stałego.
CZĘŚĆ TEORETYCZNA
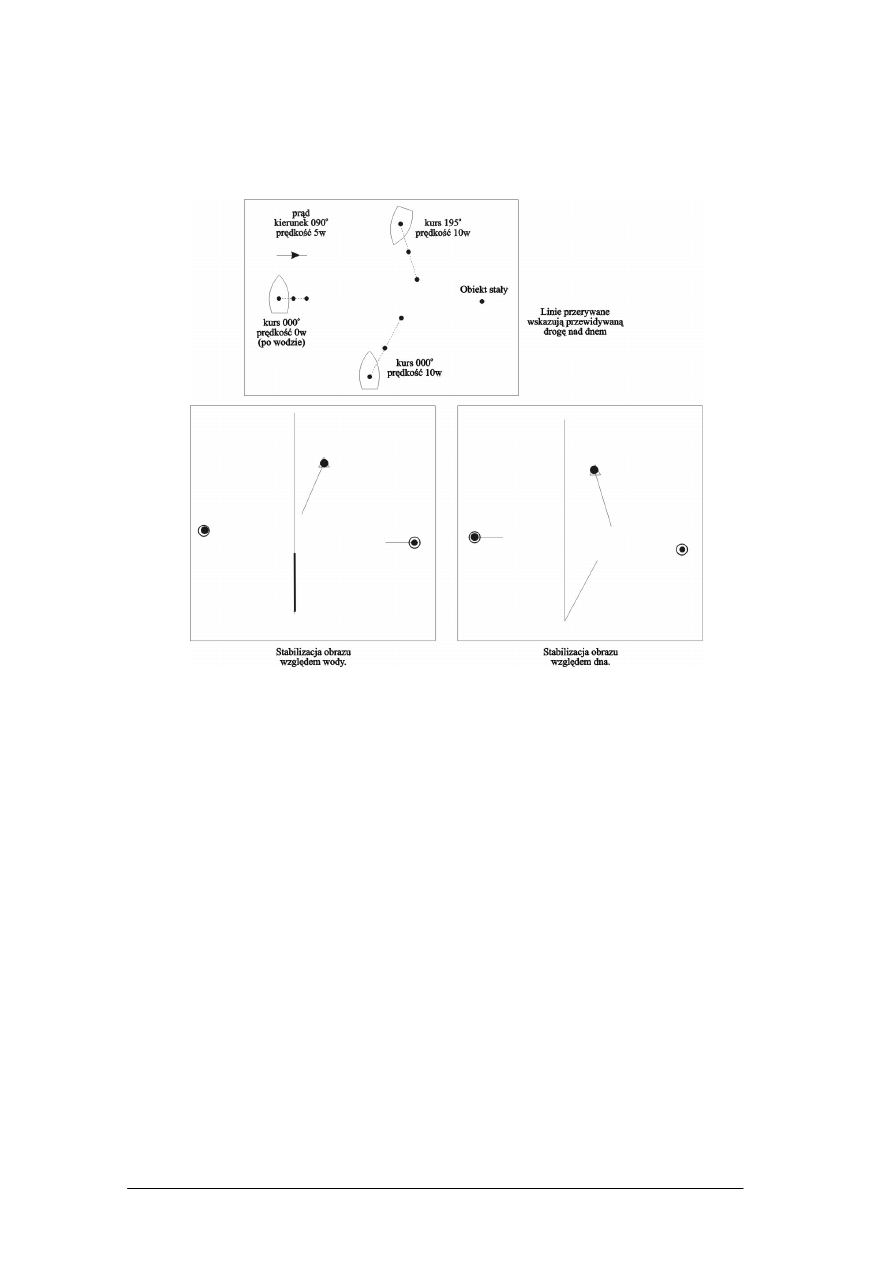
Funkcja stabilizacji obrazu radarowego względem dna
Zgodnie z Rezolucją MSC.192(79):
Powinny być dostępne tryby stabilizacji zobrazowania względem wody i względem dna.
Tryb stabilizacji i źródło informacji dot. stabilizacji powinno być jasno wskazane.
Źródło informacji o prędkości statku własnego powinno zostać wskazane a sygnały powinny
być dostarczone z sensorów zatwierdzonych w określonych wymaganiach IMO odnośnie
danego trybu stabilizacji.
Powinna być dostępna funkcja stabilizacji zobrazowania względem dna, bazująca na śledzeniu
obiektu stałego. Echo wykorzystywane do tego celu powinno zostać oznaczone odpowiednim
symbolem zdefiniowanym w SN/Circ.243.
Omawiane funkcje mogą być wykorzystane do stabilizacji względem dna linii wykreślonych na
ekranie w zobrazowaniu rzeczywistym, a więc linii tworzących mapę radarową oraz linii
ograniczających działanie strefy automatycznej akwizycji. Dodatkowo istotną z punktu widzenia
nawigatora jest także sama informacja o kierunku i wartości występującego znosu statku oraz kursie
i prędkości nad dnem.
W przypadku uzyskania tego typu stabilizacji zobrazowania radarowego należy pamiętać, że
(najczęściej) zarówno wartości kursu i prędkości śledzonych obiektów prezentowane w meldunkach
radarowych jak i ich wektory rzeczywiste dotyczą ich ruchu nad dnem. W związku z tym (zwłaszcza
przy dużych wartościach prądów występujących na danym akwenie) nie należy wektorów
rzeczywistych traktować jako ustawienia sylwetek śledzonych statków względem jednostki własnej.
Jest to istotne z punktu widzenia interpretacji informacji pod katem jej właściwej kwalifikacji (np.
rodzaj spotkania statków: statki na kursach przeciwnych, przecinających czy też sytuacja
wyprzedzania.
Sytuacja taka jest przedstawiona na rys. 6.1.
Należy pamiętać, iż przy prezentacji wektorów rzeczywistych nad dnem nawigator nie powinien
wykorzystywać funkcji manewru próbnego, gdyż uzyskane informacje o bezpiecznym manewrze
związane są z ruchem statku własnego nad dnem a nie po wodzie, co może prowadzić w efekcie do
podjęcia niewłaściwych manewrów, które nie pozwolą uzyskać bezpiecznego CPA.
Wykorzystanie do kalkulacji dryfu śledzenia echa obiektu stałego polega na zakwalifikowaniu
tego obiektu jako obiektu nieruchomego względem dna po uprzednim poddaniu go akwizycji. Obiekty
te zostaną oznaczone na ekranie odpowiednim symbolem (w starszych urządzeniach często
stosowanym symbolem była litera F – Fixed target, a w nowych – wyprodukowanych po 01.01.1997,
litera R – Reference target). W większości urządzeń automatycznie rozpocznie się kalkulacja dryfu
i uzyskana zostanie stabilizacja obrazu radarowego względem dna. W niektórych urządzeniach trzeba
~ 30 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
jednak dodatkowo ręcznie włączyć funkcję kalkulacji dryfu (np. DB-7, DB-2000). Nawigator ma
zwykle możliwość zakwalifikowania kilku obiektów jako obiekty stałe, co ma zapewnić ciągłość
procesu kalkulacji dryfu w momencie zgubienia jednego z nich ze śledzenia.
Rys. 6.1. Stabilizacja obrazu radarowego ruchu rzeczywistego względem wody i dna.
Omawiając funkcje kalkulacji dryfu i stabilizacji obrazu radarowego względem dna warto
również wspomnieć o tym, że większość urządzeń posiada możliwość ręcznego wprowadzenia
parametrów znosu, wyznaczonego innymi dostępnymi metodami.
PRZEBIEG ĆWICZENIA
Charakterystyka akwenu:
Ćwiczenia odbywają się na akwenie otwartym.
Warunki hydrometeorologiczne:
Widzialność: ograniczona.
Prąd: brak.
Wiatr: brak.
Model statku:
Nazwa: drobnicowiec uniwersalny M/V NEO
Szczegółowe dane wykorzystywanego modelu statku zostały zamieszczone w załączniku nr 6.
Charakterystyka przebiegu ćwiczenia:
Ćwiczenia są realizowane niezależnie na wszystkich mostkach nawigacyjnych tzn. statki własne
nie Ćwiczenia są realizowane niezależnie na wszystkich mostkach nawigacyjnych tzn. statki własne
nie są nawzajem widoczne na ekranach radarów znajdujących się na pozostałych stanowiskach.
Przed uruchomieniem ćwiczenia należy włączyć urządzenie ARPA i dokonać właściwej regulacji.

~ 31 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
W trakcie ćwiczenia należy:
1. Przeprowadzić ręczną akwizycję widocznych na ekranie radaru obiektów.
2. Zidentyfikować echo od obiektu stałego (Racon T).
3. Dokonać stabilizacji obrazu radarowego względem dna przez zakwalifikowanie obiektu jako
stały.
4. Porównać dostępność informacji o wyliczonym znosie statku własnego na dostępnych w
symulatorze typach urządzeń ARPA.
5. Skasować obiekty ze śledzenia.
WARUNKI ZALICZENIA
Warunkiem zaliczenia ćwiczenia jest wykazanie się właściwym przygotowaniem teoretycznym,
prawidłowe wykorzystanie funkcji stabilizacji obrazu radarowego względem dna dla zainstalowanych
w symulatorze urządzeń ARPA oraz właściwa interpretacja uzyskiwanej informacji.
EFEKTY KSZTAŁCENIA REALIZOWANE W TRAKCIE ĆWICZENIA
EK2:
Potrafi w sposób efektywny wykorzystywać systemy radarowe z automatycznym
śledzeniem ech do pozyskiwania i analizy informacji o sytuacji kolizyjnej oraz podejmuje właściwe
i skuteczne decyzje antykolizyjne i nawigacyjne.
INFORMACJE DODATKOWE
Opis włączenia i wykorzystania omawianych w trakcie ćwiczenia funkcji urządzeń ARPA
zawarty został w załącznikach zamieszczonych na końcu instrukcji do ćwiczeń:
ARPA Nucleus HR 6000
– zał. 2
ARPA Concept HR 3061
– zał. 3
ARPA DB 7
– zał. 4
ARPA DB 2000
– zał. 5

~ 32 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
~ 33 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
7. ĆWICZENIE NR 5
TEMAT:
Dokładność procesu śledzenia. Ograniczenia i błędy ARPA.
CEL I ZAKRES ĆWICZENIA
Celem ćwiczenia jest prezentacja błędów i ograniczeń procesu śledzenia realizowanego w
urządzeniach ARPA.
CZĘŚĆ TEORETYCZNA
Podstawy prawne regulujące dokładność procesu śledzenia realizowanego w ARPA.
Przepisy prawne dotyczące wymaganej dokładności śledzenia obiektów zawarte są w Rezolucji
IMO A.823(19). Zgodnie z tymi wytycznymi wymagana dokładność określania poszczególnych
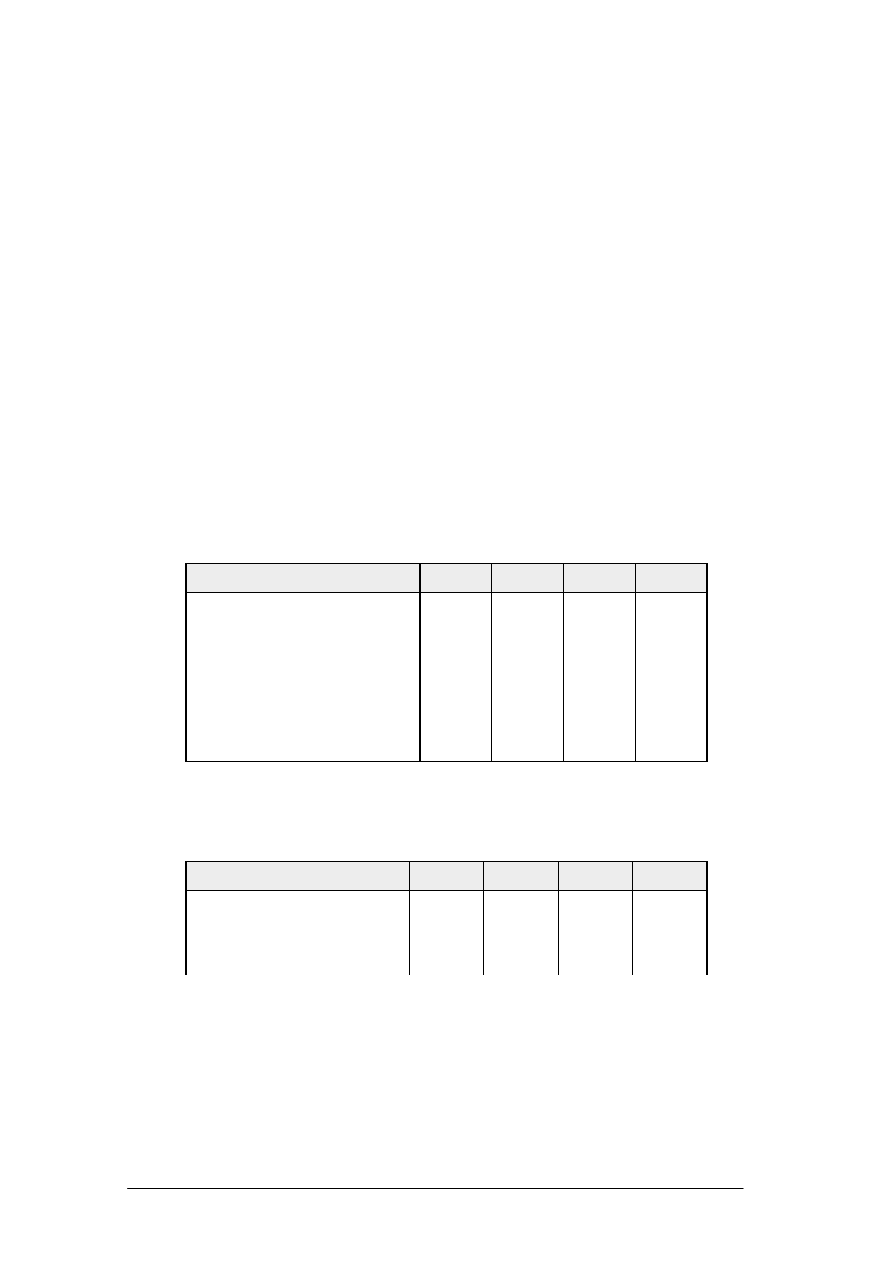
wartości elementów meldunku radarowego powinna być nie gorsza od podanych w tabelach 5.2 i 5.3
dla 4 niżej określonych sytuacji nawigacyjnych zamieszczonych w tabeli 7.1. Łącznie z błędami
pochodzącymi od logu, żyrokompasu i radaru, podane wartości odpowiadają najlepszym rezultatom
uzyskiwanym z ręcznie wykonanego nakresu w warunkach kołysania do
10
o
.
Tabela 7.1. Scenariusze testowe IMO.
Sytuacja
I
II
III
IV
Kurs statku własnego (
o
)
000
000
000
000
Prędk. statku własnego (w)
10
10
5
25
Odległość od obiektu (Mm)
8
1
8
8
Namiar (
o
)
000
000
045
045
Względny kurs obiektu (
o
)
180
090
225
225
Względna prędk. Obiektu (w)
20
10
20
20
Źródło: Rezolucja IMO 823(19)
ARPA powinna prezentować po czasie nie dłuższym niż 1 min. ustalonego stanu śledzenia,
tendencję ruchu obiektów z następującą dokładnością i z prawdopodobieństwem 95%:
Tabela 7.2. Dokładność śledzenia obiektów po czasie 1 min od momentu akwizycji.
Sytuacja
I
II
III
IV
Kurs względny (
o
)
11
7
14
15
Prędkość względna (w)
2.8
0.6
2.2
1.5
CPA (Mm)
1.6
---
1.8
2
Źródło: Rezolucja IMO 823(19)
Po czasie nie dłuższym niż 3 min. ustalonego stanu śledzenia ARPA powinna zapewnić
określenie parametrów ruchu obiektu z następującą dokładnością i z prawdopodobieństwem 95%:
Tabela 7.3. Dokładność śledzenia obiektów po czasie 3 min od momentu akwizycji.
~ 34 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Sytuacja
I
II
III
IV
Kurswzględny (
o
)
3
2.3
4.4
4.6
Prędkość względna (w)
0.8
0.3
0.9
0.8
CPA (Mm)
0.5
---
0.7
0.7
TCPA (min)
1
---
1
1
Kurs rzeczywisty (
o
)
7.4
2.8
3.3
2.6
Prędkość rzeczywista (w)
1.2
0.8
1
1.2
Źródło: Rezolucja IMO 823(19)
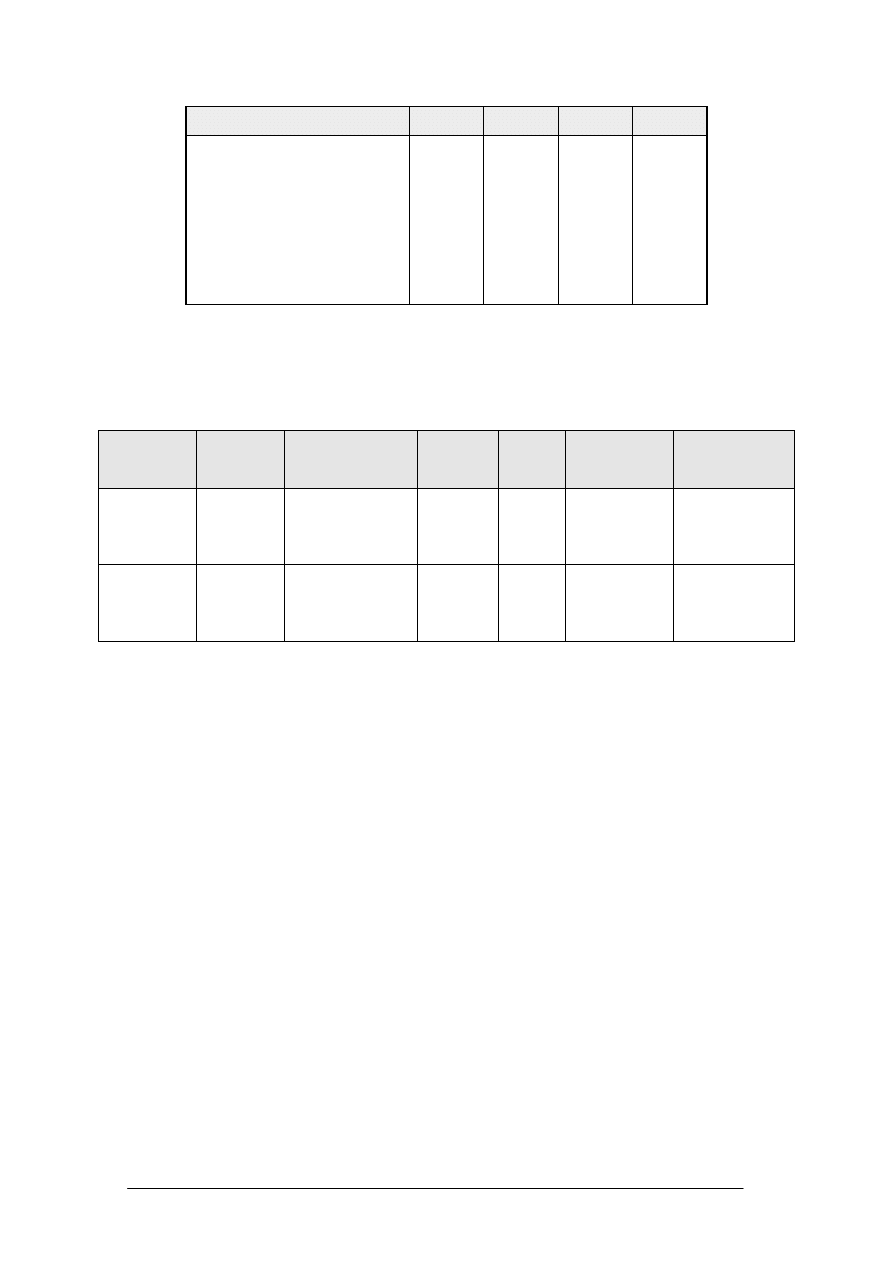
Dla urządzeń instalowanych na statkach morskich po 30.06.2008 obowiązuje rezolucja
MSC.192(79) „Przyjęcie zmienionych wymagań techniczno- eksploatacyjnych dla urządzeń radarowych”
(Adoption of the Revised Performance Standards for Radar Equipment). W tabeli 7.4 przedstawiono
dokładności śledzenia obiektów zawarte w w/w rezolucji (na poziomie prawdopodobieństwa 95%).
Czas
śledzenia
[min]
Kurs
względny
[˚]
Prędkość
względna [w]
CPA
[Mm]
TCPA
[min]
Kurs
rzeczywisty
[˚]
Prędkość
rzeczywista [w]
1
min-
trend
11
1.5 lub 10%( w
zależności która
wartość
jest
większa)
1.0
-
-
-
3 min- ruch
3
0.8
lub
1%
(w
zależności
która wartość jest
większa)
0.3
0.5
5
0.5
lub
1%
(w zależności
która wartość
jest większa)
Czynniki wpływające na błędy procesu śledzenia.
Poziomy dokładności określone w przepisach IMO związane są ściśle z wielkościami błędów
sygnałów wejściowych, zależnych od jakości współpracujących z systemem ARPA urządzeń
zewnętrznych.
Wszystkie błędy, które mogą mieć wpływ na dokładność oraz właściwą interpretację
prezentowanych danych można podzielić na trzy grupy:
a) błędy związane z dokładnością pracy urządzeń, do których można zaliczyć:
błędy określenia pozycji śledzonego obiektu związane z:
występowaniem zjawiska migotania echa (Glint),
błędem pomiaru namiaru spowodowanym:
różnicą między rzeczywistym położeniem anteny radaru, a informacją o jej
położeniu, uzyskaną z układu mierzącego to położenie, a spowodowaną luzem
przekładni anteny
przechyłem płaszczyzny obrotu anteny, wywołanym kołysaniem statku
wystąpieniem błędu paralaksy związanym z kołysaniem statku
niesymetrycznością wiązki
kwantyzacją zmierzonego namiaru obserwowanego obiektu.
błędem pomiaru odległości spowodowanym:
zmianą odległości występującą przy przechyłach bocznych statku
błędem związanym z kwantyzacją odległości
błędem związanym ze zmianą amplitudy odebranego sygnału.
błędy logu
~ 35 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
błędy żyrokompasu.
b) błędy spowodowane niedokładnościami przetwarzania danych radarowych, nieodpowiednio
dobranym algorytmem i zaakceptowanymi granicami dokładności, do których w pierwszej
kolejności należy zaliczyć:
stabilizacja procesu śledzenia w czasie do 3 minut od momentu akwizycji
pogorszenie dokładności procesu śledzenia w trakcie wykonywania manewru przez statek
własny i ponowna jego stabilizacja po zakończeniu manewru
opóźnienia wykrycia manewru wykonywanego przez śledzony statek, wzrost błędów
śledzenia w trakcie samego manewru i ponowna stabilizacja procesu śledzenia po
zakończeniu manewru
gubienie obiektów ze śledzenia
zamiana śledzonych obiektów
c) błędy w interpretacji wyświetlanych danych (błędy operatora), do których można zaliczyć
przede wszystkim:
pomyłkę w interpretacji aktualnie wyświetlanych wektorów (np. wektory rzeczywiste
traktowane są jako względne i odwrotnie)
traktowanie punktu przecięcia się wektorów rzeczywistych jako punktu kolizyjnego, co
jest prawdą jedynie w przypadku gdy wyliczone CPA jest równe zeru
traktowanie Trial Target Data jako rzeczywistych parametrów minięcia obiektu podczas
użycia funkcji Trial (oczywiście jeśli taki rodzaj danych jest dostępny)
uznanie obiektu za manewrujący na podstawie zmiany położenia wyświetlanego wektora
we wstępnej fazie śledzenia (między pierwszą a trzecią minutą okresu śledzenia)
złą interpretację wyświetlanej historii ruchu obiektu (ocena manewrów śledzonych
obiektów na podstawie historii ruchu względnego).
PRZEBIEG ĆWICZENIA
Ćwiczenie 1
Charakterystyka akwenu:
Akwen otwarty.
Warunki hydrometeorologiczne:
Widzialność: ograniczona.
Prąd: brak.
Wiatr: brak.
Model statku:
Nazwa: drobnicowiec uniwersalny M/V NEO.
Statek porusza się z prędkością rzeczywistą 10 w kursem 000
0
.
Charakterystyka przebiegu ćwiczenia:
Przed uruchomieniem ćwiczenia należy włączyć urządzenie ARPA i dokonać właściwej
regulacji (włączyć zobrazowanie ruchu rzeczywistego, wektory rzeczywiste 15 min., ustawić limity
CPA na 1,0 Mm i TCPA na 15 min.).
Ćwiczenie polega na wprowadzeniu do śledzenia widocznego na ekranie echa radarowego,
wyświetleniu jego meldunku radarowego, a następnie rejestracji w określonych odstępach wartości
kursu i prędkości rzeczywistej oraz CPA w trakcie całego ćwiczenia. Przebieg ćwiczenia jest
następujący:
1. W początkowej fazie ćwiczenia symulowany jest scenariusz testowy IMO nr 1 (Ko=180
0
;
Vo=10 w).

~ 36 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
2. Następnie śledzony obiekt wykonuje manewr zmiany kursu na 220
0
. Zadanie polega na
wykryciu momentu rozpoczęcia manewru i zarejestrowanie czasu jego wykrycia, co pozwoli
na ustalenie opóźnienia prezentacji manewrów obiektu śledzonego.
3. Po ustabilizowaniu procesu śledzenia obiektu (w momencie określonym przez prowadzącego
ćwiczenia) należy wykonać manewr zmiany kursu statku własnego na kurs 040
0
.
W trakcie ćwiczenia należy:
1. Po upływie 1 minuty od włączenia ćwiczenia wprowadzić obiekt do śledzenia.
2. Po ukazaniu się pierwszego wektora obiektu wyświetlić jego meldunek radarowy i w
odstępach 15 sek. w tabeli notować: kurs rzeczywisty obiektu, prędkość rzeczywistą obiektu i
CPA aż do zakończenia ćwiczenia.
3. Obserwować wektor rzeczywisty obiektu pod kątem wykrycia wykonywanego przez niego
manewru, a po jego zauważeniu zapisać czas wykrycia manewru..
4. Obserwować wektor ruchu rzeczywistego obiektu do momentu jego ponownej stabilizacji
(Ko=220
0
; Vo=10 w); zanotować czas stabilizacji wektora.
5. W czasie określonym przez prowadzącego ćwiczenia wykonać manewr zmiany kursu statku
własnego na kurs 040
0
i obserwować stabilność procesu śledzenia w trakcie i po zakończeniu
manewru.
6. Skasować obiekt ze śledzenia.
Ćwiczenie 2
Charakterystyka przebiegu ćwiczenia:
Ćwiczenie na prezentację błędnie wprowadzonej informacji o prędkości na proces śledzenia ARPY
oraz na manewr próbny. Należy wprowadzić manualnie prędkość 10 w, w rzeczywistości statek
poruszać się będzie z prędkością 15,4 w. Na ekranie znajdują się dwa obiekty.
Zadaniem studentów jest:
1. wprowadzenie obiektów do śledzenia,
2. po ustabilizowaniu się wektorów należy spisać meldunki radarowe dla obu obiektów,
3. zaplanowanie za pomocą funkcji manewru próbnego oraz wykonanie zaplanowanego
manewru, tak aby z obiektem niebezpiecznym minąć się na odległość 1,0 Mm (manewr
kursem),
UWAGA: należy wykonać dokładnie manewr, który został zaplanowany! NIE należy
korygować wielkosci manewru!!!
4. po wykonaniu manewru i ustabilizowaniu się wektorów należy spisać ponownie meldunki
radarowe dla obu obiektów.
Porównując wartości CPA, TCPA oraz kursu i prędkości odczytane z ARPA, z wartościami podanymi
przez prowadzącego należy wywnioskować, które z tych wartości są podawane prawidłowo, a które
nie. Należy również podać przyczynę tych różnic.
Charakterystyka akwenu:
Akwen otwarty.
Warunki hydrometeorologiczne:
Widzialność: ograniczona.
Prąd: brak.
Wiatr: N 7
o
B.
Model statku:
Nazwa: drobnicowiec uniwersalny M/V NEO.
Szczegółowe dane wykorzystywanego modelu statku zostały zamieszczone w załączniku nr 6.
Symulowane silne myszkowanie statku.
~ 37 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Ćwiczenie 3
Charakterystyka akwenu:
Akwen otwarty.
Warunki hydrometeorologiczne:
Widzialność: ograniczona.
Prąd: brak.
Wiatr: N 7
o
B.
Model statku:
Nazwa: drobnicowiec uniwersalny M/V NEO.
Szczegółowe dane wykorzystywanego modelu statku zostały zamieszczone w załączniku nr 6.
Symulowane silne myszkowanie statku.
Charakterystyka przebiegu ćwiczenia:
Celem ćwiczenia jest prezentacja błędów śledzenia w złych warunkach pogodowych (duże
myszkowanie statku własnego) na akwenach o dużym natężeniu ruchu statków (małe odległości
mijania).
W trakcie ćwiczenia należy:
1. Po włączeniu ćwiczenia należy dokonać ręcznej akwizycji wszystkich obiektów widocznych
na ekranie.
2. W zobrazowaniu ruchu rzeczywistego należy obserwować proces stabilizacji procesu
śledzenia pod kątem jego niestabilności, opóźnień w przekazywaniu informacji o manewrach
śledzonych statków oraz występowania zjawisk zamiany śledzonych obiektów i ich gubienia
ze śledzenia.
3. W przypadku zgubienia obiektu ze śledzenia lub zamiany śledzonych obiektów ponownie
poddać je akwizycji.
4. Skasować obiekty ze śledzenia.
WARUNKI ZALICZENIA
Warunkiem zaliczenia ćwiczenia jest właściwe wypełnienie tabeli rejestracji wyników
(ćwiczenie nr 1) potwierdzone przez prowadzącego ćwiczenia, a następnie opracowanie
zarejestrowanych wyników estymacji (kurs i prędkość rzeczywista oraz CPA obiektu) w postaci tabeli
i wykresów (w programie MICROSOFT EXCEL) wg zaleceń prowadzącego ćwiczenia.
Po sporządzeniu wykresów należy ocenić dokładność procesu śledzenia pod kątem
maksymalnych wartości błędów w odniesieniu do źródeł ich powstania oraz wymagań zawartych w
rezolucjach IMO.
Czas
Kurs
Prędkość
CPA
Czas
Kurs
Prędkość
CPA
1m 30s
11m 00s
1m 45s
11m 15s
2m 00s
11m 30s
2m 15s
11m 45s
2m 30s
12m 00s
2m 45s
12m 15s
3m 00s
12m 30s
3m 15s
12m 45s
3m 30s
13m 00s
3m 45s
13m 15s
4m 00s
13m 30s
4m 15s
13m 45s
4m 30s
14m 00s
4m 45s
14m 15s
…..
….

~ 38 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Dalsza część sprawozdania powinna zawierać analizę błędów powstałych w wyniku wykonania
manewru zapobiegawczego w ćwiczeniu 2 wraz z identyfikacją ich źródła.
Część sprawozdania dotycząca ćwiczenia nr 3 powinna zawierać opis zaobserwowanych w
trakcie ćwiczenia błędów śledzenia wraz z ich analizą i próbą identyfikacji źródeł błędów.
EFEKTY KSZTAŁCENIA REALIZOWANE W TRAKCIE ĆWICZENIA
EK1:
Ma wiedzę z zakresu wymagań technicznych, zasad wykorzystania i ograniczeń syste-
mów z automatycznym śledzeniem ech.
EK2:
Potrafi w sposób efektywny wykorzystywać systemy radarowe z automatycznym
śledzeniem ech do pozyskiwania i analizy informacji o sytuacji kolizyjnej oraz podejmuje właściwe
i skuteczne decyzje antykolizyjne i nawigacyjne.
INFORMACJE DODATKOWE
Opis włączenia i wykorzystania omawianych w trakcie ćwiczenia funkcji urządzeń ARPA
zawarty został w załącznikach zamieszczonych na końcu instrukcji do ćwiczeń:
ARPA Nucleus HR 6000
– zał. 2
ARPA Concept HR 3061
– zał. 3
ARPA DB 7
– zał. 4
ARPA DB 2000
– zał. 5

~ 39 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
8. ĆWICZENIE NR 6
TEMAT:
Wykorzystanie elektronicznych map radarowych - ćwiczenia kompleksowe z
wykorzystaniem urządzeń radarowych do nawigacji i unikania kolizji na
akwenach ograniczonych o dużym zagęszczeniu ruchu statków w warunkach
ograniczonej widzialności.
CEL I ZAKRES ĆWICZENIA
Celem ćwiczenia jest wykorzystanie urządzeń ARPA na akwenach przybrzeżnych w warunkach
ograniczonej widzialności do prowadzenia nawigacji oraz unikania sytuacji niebezpiecznych oraz
zapoznanie się z możliwością tworzenia, zapisywania i prawidłowego wykorzystania elektronicznych
map radarowych.
CZĘŚĆ TEORETYCZNA
Charakterystyka akwenów ograniczonych o dużym zagęszczeniu ruchu statków.
W rejonach o dużym zagęszczeniu ruchu statków w celu poprawy bezpieczeństwa żeglugi
zostały wyznaczono systemy ruchu. Systemy te zapewniają większe bezpieczeństwo, lecz nie
zwalniają nawigatorów od posiadania odpowiedniej wiedzy nawigacyjnej umożliwiającej bezpieczne
prowadzenie statku w samym systemie i podczas włączania się do niego. Staje się to szczególnie
ważne podczas warunków ograniczonej widzialności, które redukują ilość informacji nawigacyjnych
praktycznie do tych, które można otrzymać z przede wszystkim z urządzeń radarowych i ARPA.
W związku z tym, oprócz podstawowych wiadomości o akwenie (locja, mapa nawigacyjna i pozostałe
pomoce nawigacyjne), ważna jest znajomość poprawnego wykorzystania urządzeń radarowych do
określania pozycji, oceny sytuacji i unikania kolizji.
W związku z występowaniem przypadków łamania obowiązujących przepisów, co w
konsekwencji może doprowadzić do poważnych w skutkach katastrof morskich, ruch statków jest na
bieżąco monitorowany w stacjach brzegowych. Odpowiedzialny za monitoring ruchu brytyjski CNIS
(Channel Navigation Information Service), podlegający Dover Costguard, ma możliwość obserwacji
do 900 jednostek (3 radary), natomiast Griz-Nez Traffic może śledzić ruch 1000 jednostek (2 radary).
Zautomatyzowane funkcje systemu umożliwiają alarmowanie w przypadku: naruszania postanowień
prawidła 10, sytuacji kolizyjnych, wykonywania przez statki gwałtownych manewrów kursem
i prędkością, statków wchodzących w obszary wyłączone nawigacji i statków stojących na kotwicy.
Stacje brzegowe mają możliwość rejestrowania przebiegu całego zdarzenia. Materiał taki może być
wykorzystany później do analizy zaistniałej sytuacji. W przypadku potrzeby identyfikacji jednostki
łamiącej przepisy, która nie jest wyposażona w AIS, istnieje możliwość nagrania filmu z samolotu
straży brzegowej, nawet w złych warunkach pogodowych oraz w nocy.
Funkcja radarowych map elektronicznych.
Większość z produkowanych urządzeń ARPA umożliwia wykreślenie na ekranie specjalnych
linii nawigacyjnych i map, ułatwiających interpretację obrazu radarowego. Wykreślane linie mogą
mieć określoną długość, kierunek i mogą być ustawione w wybranym miejscu na ekranie. Dzięki temu
istnieje możliwość wykreślenia systemów rozgraniczenia ruchu, kanałów, otoczenia rejonów
niebezpiecznych dla żeglugi, słabo widocznej linii brzegowej itp. Linie takie mogą być także
wykorzystane do nawigacji przy stosowaniu techniki linii równoległych, choć w przypadku urządzeń
ARPA ma to może mniejsze znaczenie. Dodatkowo tak sporządzone mapy mogą być zwykle
uzupełnione symbolami (w zależności od typu urządzenia może to być jeden lub wiele różnych
symboli) dla oznaczenia pław, staw, latarniowców lub niebezpieczeństw nawigacyjnych. Oczywiście

~ 40 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
sposób konstruowania takiej mapy dla każdego urządzenia będzie miał swój indywidualny charakter.
Tak sporządzone mapy mogą być zwykle zapisane w specjalnym obszarze pamięci wewnętrznej
komputera lub na zewnętrznych nośnikach informacji (dyskietki, specjalne karty). Pozwala to na
wielokrotne użycie map, bez groźby ich utraty po wyłączeniu zasilania urządzenia. Oczywiście raz
sporządzona mapa może być następnie poprawiona lub uzupełniona o kolejne elementy.
Ograniczeniem jest jedynie maksymalna liczba elementów, które mogą zostać użyte do konstrukcji
jednej mapy oraz maksymalna liczba map (choć przy użyciu zewnętrznych nośników informacji nie
ma to już takiego znaczenia).
Wykreślanie nowej mapy może odbywać się w oparciu o widoczny na ekranie obraz radarowy.
Nie jest to jednak konieczne. Oczywiście w ten sposób mapę można sporządzić szybciej. Oficer
powinien jednak przygotować mapę wcześniej, korzystając z informacji zawartej na mapie
nawigacyjnej. Mapa taka może być tworzona w oparciu o namiary i odległości między jej
charakterystycznymi punktami (sposób częściej stosowany) lub w oparciu o ich współrzędne
geograficzne (np. DB-7, DB-2000). Przy drugim sposobie sporządzania mapy, a przed jej
wyświetleniemm, należy pamiętać o podaniu przybliżonej pozycji geograficznej statku własnego, aby
mapa mogła być wyświetlona na ekranie (zakres pracy radaru). Nie ma znaczenia zakres na jakim
mapa jest sporządzana ponieważ przy ich zmianie jest ona odpowiednio skalowana.
Po wywołaniu już sporządzonej mapy konieczne jest zwykle "zgranie" jej z widocznym na
ekranie rzeczywistym obrazem, gdyż z reguły występuje jej mniejsze lub większe przesunięcie.
Należy wykorzystywać przy tym jej punkty charakterystyczne (symbole). Jeśli żegluga odbywa się
w rejonach występowania prądów powinna być włączona funkcja stabilizacji obrazu względem dna,
ponieważ inaczej widoczna mapa elektroniczna nie będzie związana z lądem i będzie poruszała się
względem ech od obiektów stałych i lądu. Konieczne będzie wtedy ciągłe jej pozycjonowanie.
Przy korzystaniu z map radarowych należy pamiętać, że nadal najważniejsze są widoczne echa,
a linie i symbole mają za zadanie jedynie pomóc w lepszej interpretacji widocznego na ekranie obrazu
radarowego. Nie należy więc tworzyć mapy zbyt skomplikowanej, mogącej zaciemniać widoczny
obraz radarowy.
Większe znaczenie dla nawigacji posiadają mapy tworzone w zobrazowaniu ruchu
rzeczywistego i dlatego większość urządzeń wykorzystuje tylko tą możliwość. Przy tworzeniu i
wyświetlaniu mapy musi być włączone wtedy zobrazowanie rzeczywiste. Niektóre z urządzeń
posiadają też możliwość utworzenia mapy w zobrazowaniu względnym (np. KH-6000, KH-3000).
Taka mapa czy linie nawigacyjne są na stałe związane ze statkiem własnym, podobnie jak np. kręgi
automatycznej akwizycji. Dzięki temu można zaznaczyć na ekranie radaru stałe namiary, sektory
martwe itp.
PRZEBIEG ĆWICZENIA
Charakterystyka akwenu.
Cieśnina Dover jest ważnym szlakiem żeglugowym łączącym Morze Północne z Oceanem
Atlantyckim. W północno-wschodniej części systemu rozgraniczenia ruchu występuje jego
rozgałęzienie (porty Belgii i Holandii) w związku z czym następuje krzyżowanie się dróg
wyznaczonych przez SRR. Duże natężenie ruchu statków w tym rejonie powoduje wzrost
niebezpieczeństwa kolizji.
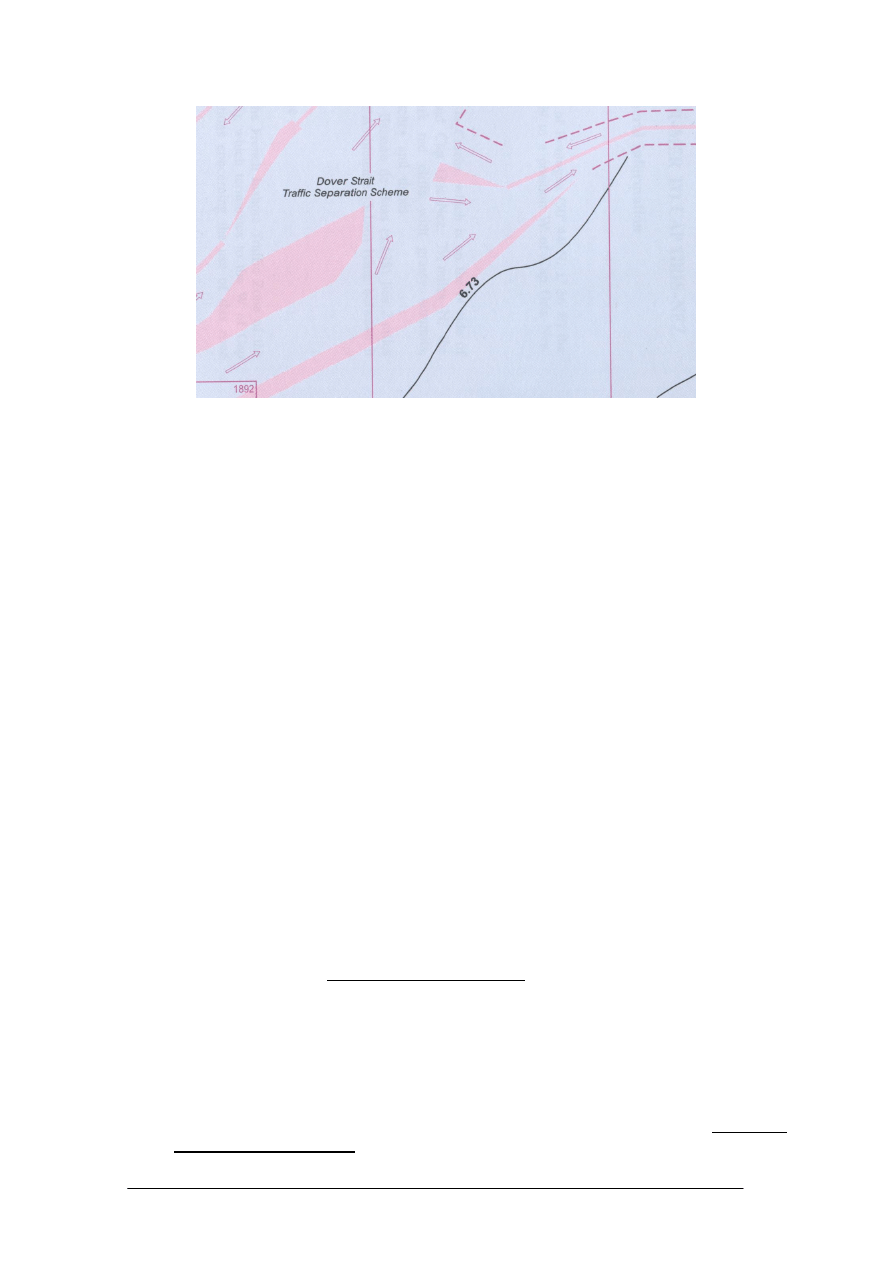
~ 41 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Rys.8.3. Mapa systemu rozgraniczenia ruchu TSS Dover – część wschodnia.
W trakcie ćwiczenia należy zapoznać się zarówno z ograniczeniami nawigacyjnymi jak
i warunkami hydrometeorogicznymi charakterystycznymi dla tego akwenu (BA Chart no 323 oraz
Admirality Sailings Directions DOVER STRAIT PILOT Volume I).
Warunki hydrometeorologiczne
Widzialność: ograniczona.
Prąd: aktualną wartość prądu należy określić przy wykorzystaniu funkcji automatycznej
kalkulacji dryfu.
Wiatr: brak.
Opis i realizacja ćwiczenia
Na obszarze cieśniny symulowany jest ruch statków nawigujących w pasach systemu
rozgraniczenia, przechodzących w poprzek systemu oraz kutrów rybackich poławiających w strefiach
separacyjnych. Statki znajdują się w ustalonych pozycjach wyjściowych i mają określony port
(miejsce) przeznaczenia. Każdy statek ma ustalony kurs i prędkość początkową, które przed
rozpoczęciem ćwiczenia należy skontrolować. Po wyznaczeniu początkowej pozycji statku należy
zaplanować trasę jego przejścia do punktu docelowego, a następnie (na podstawie mapy nawigacyjnej)
zbudować elektroniczną mapę radarową akwenu w zobrazowaniu ruchu rzeczywistego.
Przed przystąpieniem do ćwiczenia należy zapoznać się z informacjami nawigacyjnymi
dotyczącymi akwenu nawigacyjnego (locja, mapa nawigacyjna).
Podczas realizacji ćwiczenia należy:
1. zbudować elektroniczną mapę radarową akwenu w zobrazowaniu ruchu rzeczywistego;
2. prawidłowo wyregulować ustawienia radaru (wzmocnienie, ZRW, rozróżnialnik, długości
poświat, zakres);
3. ustawić odpowiednie długości wektorów i parametry CPA
LIMIT
i TCPA
LIMIT
;
4. zlokalizować i wybrać obiekty wykorzystywane w nawigacji radarowej w żegludze
przybrzeżnej (pod kątem określenia pozycji, wykorzystania linii równoległych);
5. określić pozycję statku;
6. zaplanować trasę statku (uwaga: maksymalnie trzy WP);
7. określać pozycję statku co 5 minut lub w zależności od sytuacji (pozycje wpisywać do tabeli-
wzór tabeli: zał. nr 7);
8. dokonać stabilizacji obrazu radarowego względem dna z wykorzystaniem funkcji śledzenia
obiektu stałego (parametry prądu wpisywać do tabeli razem z pozycjami co 10 minut);
9. w trakcie ćwiczenia właściwie wykorzystywać przygotowaną wcześniej mapę radarową do
prawidłowej identyfikacji obiektów i interpretacji sytuacji panującej na akwenie z ciągłą
kontrola pozycji mapy na ekranie radaru;
10. podczas realizacji ćwiczenia stosować prawidła MPDM odpowiednie dla warunków
ograniczonej widzialności oraz właściwie wykorzystywać poznane funkcje ARPA.
~ 42 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Sytuację początkową poszczególnych statków przedstawia poniższa tabela.
Statki wzajemnie niewidoczne.
Ćwiczenia z linią brzegową – Dover Strait.
Model statku: drobnicowiec uniwersalny M/V NEO (szczegółowe dane wykorzystywanego
modelu statku zostały zamieszczone w załączniku nr 6).
Nr statku
Kurs
Nastawa
prędkości
Port przeznaczenia
OS 1.
025
o
CN – 15.4 w
Morze Północne
OS 2.
060
o
CN – 15.4 w
Antwerpia
OS 3.
140
o
CN – 15.4 w
Antwerpia
OS 4.
250
o
CN – 15.4 w
Plymouth
OS 5.
040
o
CN – 15.4 w
Antwerpia
OS 6.
140
o
CN – 15.4 w
Antwerpia
WARUNKI ZALICZENIA
Warunkiem zaliczenia ćwiczenia jest:
stworzenie radarowej mapy ruchu rzeczywistego
właściwe wykorzystanie mapy w trakcie realizacji ćwiczenia (interpretacja informacji,
stabilizacja obrazu radarowego względem dna, kontrola pozycji mapy)
prawidłowe zaplanowanie trasy statku
wypełnienie tabeli z pozycjami i parametrami prądów
znajomość i prawidłowe wykorzystanie funkcji ARPA
prawidłowe stosowanie przepisów MPDM.
EFEKTY KSZTAŁCENIA REALIZOWANE W TRAKCIE ĆWICZENIA
EK1:
Ma wiedzę z zakresu wymagań technicznych, zasad wykorzystania i ograniczeń syste-
mów z automatycznym śledzeniem ech.
EK2:
Potrafi w sposób efektywny wykorzystywać systemy radarowe z automatycznym
śledzeniem ech do pozyskiwania i analizy informacji o sytuacji kolizyjnej oraz podejmuje właściwe
i skuteczne decyzje antykolizyjne i nawigacyjne.
EK3:
Posiada umiejętność dowodzenia wachtą nawigacyjną, precyzyjnie wyznaczając zadania
członkom wachty oraz nadzorując prawidłowość ich wykonania.
INFORMACJE DODATKOWE
Opis włączenia i wykorzystania omawianych w trakcie ćwiczenia funkcji urządzeń ARPA
zawarty został w załącznikach zamieszczonych na końcu instrukcji do ćwiczeń:
ARPA Nucleus HR 6000
– zał. 2
ARPA Concept HR 3061
– zał. 3
ARPA DB 7
– zał. 4
ARPA DB 2000
– zał. 5

~ 43 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
9. ĆWICZENIE NR 7
TEMAT:
Ćwiczenia kompleksowe z wykorzystaniem urządzeń radarowych do nawigacji
i unikania kolizji na akwenach trudnych nawigacyjnie (torach wodnych) w
warunkach ograniczonej widzialności.
CEL I ZAKRES ĆWICZENIA
Celem ćwiczenia jest wykorzystanie urządzeń ARPA na akwenach przybrzeżnych w warunkach
ograniczonej widzialności do prowadzenia nawigacji oraz unikania sytuacji niebezpiecznych.
CZĘŚĆ TEORETYCZNA
Charakterystyka pojęcia „wąskie przejścia”.
Międzynarodowe prawo drogi morskiej oraz orzecznictwo nie definiuje w sposób precyzyjny
pojęcia wąskiego przejścia. Wąskimi przejściami nazywa się zazwyczaj zwężenia dróg wodnych, np.
cieśniny, kanały itp. łączące duże akweny morskie lub łączące wody portowe z akwenami morskimi,
np. tory podejściowe do portów. Każde wąskie przejście ma określoną szerokość. Wpływ na sposób
nawigowania na takim ograniczonym akwenie mają przede wszystkim warunki naturalne (kształt linii
brzegowej, głębokości, prądy, obecność niebezpieczeństw nawigacyjnych itp.). W związku z tym za
wąskie przejście można przyjąć taki akwen, na którym nie ma możliwości swobodnego
manewrowania w celu wyminięcia się dwóch statków jak ma to miejsce na akwenach otwartych.
Należy też rozróżnić miedzy sobą pojęcia wąskiego przejścia i toru wodnego. Wąskie przejście
jest pojęciem szerszym, gdyż wewnątrz wąskiego przejścia wyznaczone są tory wodne pozwalające na
prowadzenie bezpiecznej żeglugi. Zasady zachowania się statków w wąskim przejściu lub na torze
wodnym określa prawidło nr 9. Naczelna zasadą obowiązującą na tych akwenach jest zasada ruchu
prawostronnego. Zasada ta powinna być stosowana przez cały czas przechodzenia wzdłuż wąskiego
przejścia czy toru wodnego.
PRZEBIEG ĆWICZENIA
Charakterystyka akwenu
System rozgraniczenia ruchu i tor głębokowodny przy Hatter Barn są częścią duńskich
wodnych dróg tranzytowych. Przez system rozgraniczenia ruchu przechodzi ruta T, której przebieg
przedstawiono na rys. 1. Trasę wyznaczono w celu zwiększenia bezpieczeństwa nawigacji,
szczególnie pod kątem dużych statków, nawigujących na wodach pomiędzy Skagen a północno-
wschodnim rejonem Gedser (akwen Kattegat-Wielki Bełt - wody zachodniego Bałtyku). Ruta T
została dobrze oznakowana (pławy świetlne, światła nawigacyjne). Głębokości na tym odcinku
wynoszą minimum 17 m. Jednak dla większych statków, na niektórych odcinkach trasy, obszar ten
jest akwenem trudnym nawigacyjnie, co jest spowodowane wąskimi przejściami, ostrymi zakrętami,
silnymi prądami i występującymi mieliznami. Oprócz tego na całym akwenie mogą poławiać licznie
duże i małe statki rybackie, a w okresie letnim dodatkowym utrudnieniem jest duża liczba jednostek
żeglugi rekreacyjnej. W samym tylko Wielkim Bełcie ruch statków sięga do 80 000 jednostek rocznie.
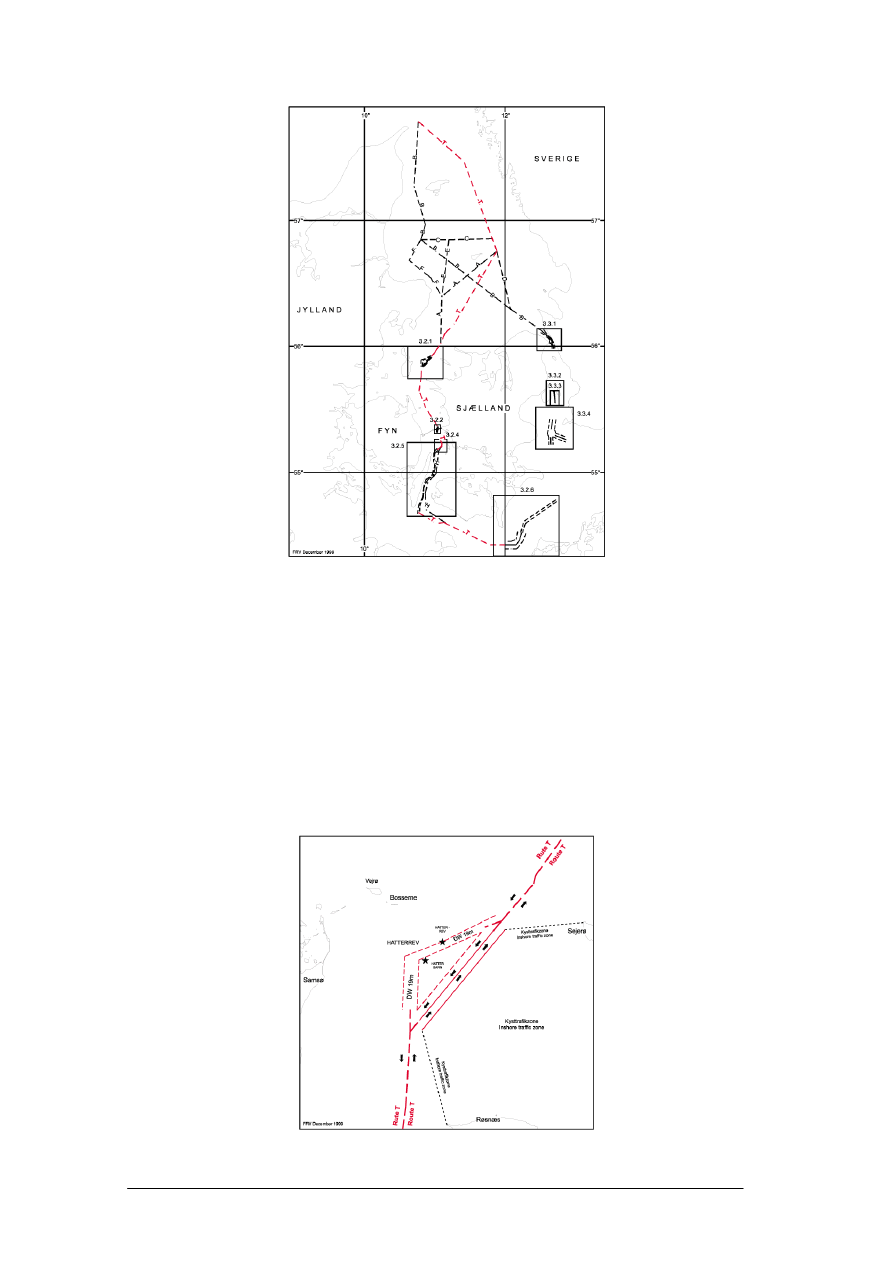
~ 44 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Rys. 9.1. Mapa wodnych dróg tranzytowych Bałtyk – Morze Północne. (źródło: http://www.frv.dk).
Znacznie trudniejsza w nawigacji jest południowa część trasy, która przechodzi między innymi
przez system rozgraniczenia ruchu przy Hatter Barn (rejon ten znajduje się w kwadracie oznaczonym
cyframi 3.2.1 na rys. 9.1, a dokładny przebieg wyznaczonych torów wodnych pokazany jest na rys.
9.2). Maksymalne głębokości w tym systemie wynoszą 15 m. Statki o większym zanurzeniu muszą
nawigować sąsiadującym torem głębokowodnym, gdzie szczególną ostrożność należy zachować na
obszarze „Hatter Barn” i „Hatter Rev”. W tym miejscu szerokość akwenu żeglownego wynosi 650 m.
Trudność polega na prawidłowym zaplanowaniu manewru na podejściu do zakrętu, przy którym
znajdują się mielizny, szczególnie w przypadku, gdy na torze znajduje się drugi statek poruszający się
w kierunku przeciwnym. Według przeprowadzonych statystyk, w latach 1997-2001, w tym miejscu
doszło do 1 kolizji i 11 wejść na mieliznę.
Rys. 9.2. TSS i tor głębokowodny przy Hatter Barn (źródło: http://www.frv.dk).
~ 45 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Warunki hydrometeorologiczne
Widzialność: ograniczona.
Prąd: aktualną wartość prądu należy określić przy wykorzystaniu funkcji automatycznej
kalkulacji dryfu.
Wiatr: brak.
Przebieg ćwiczenia
W ćwiczeniu symulowany jest ruch statków nawigujących w granicach toru głębokowodnego
oraz systemu rozgraniczenia ruchu. Statki znajdują się w ustalonych pozycjach wyjściowych i mają
określony port (miejsce) przeznaczenia. Każdy statek ma ustalony kurs i prędkość początkową, które
przed rozpoczęciem ćwiczenia należy skontrolować. Po wyznaczeniu początkowej pozycji statku
należy zaplanować trasę jego przejścia do punktu docelowego. Przed przystąpieniem do ćwiczenia
należy zapoznać się z informacjami nawigacyjnymi dotyczącymi akwenu nawigacyjnego (locja, mapa
nawigacyjna).
Podczas realizacji ćwiczenia należy:
1. zapoznać się z akwenem (uwarunkowania nawigacyjne, warunki hydrometeorologiczne);
2. prawidłowo wyregulować ustawienia radaru (wzmocnienie, ZRW, rozróżnialnik, długości
poświat, zakres);
3. ustawić odpowiednie długości wektorów i parametry CPA LIMIT i TCPA LIMIT;
4. zlokalizować i wybrać obiekty wykorzystywane w nawigacji radarowej (pod kątem określenia
pozycji, wykorzystania linii równoległych);
5. określić pozycję statku;
6. zaplanować trasę statku;
7. kontrolować pozycję statku w oparciu o odległości mijania znaków nawigacyjnych (pozycje
wpisywać do tabeli- wzór tabeli: zał. nr 7);
8. określać na bieżąco wartość prądu z wykorzystaniem funkcji stabilizacji obrazu względem
dna lub na podstawie kursu i prędkości śledzonego obiektu stałego (parametry prądu
wpisywać do tabeli razem z pozycjami co 10 minut);
9. podczas realizacji ćwiczenia stosować prawidła MPDM odpowiednie dla warunków
ograniczonej widzialności oraz akwenu właściwie wykorzystując poznane funkcje ARPA.
Sytuację początkową dla poszczególnych statków w kolejnych ćwiczeniach przedstawiają
poniższe tabele.
Ćwiczenie nr 1
Statki wzajemnie niewidoczne.
Ćwiczenia z linią brzegową – Hatter Barn. Pozycja wyjściowa
dla wszystkich statków znajduje się na południe od TSS. Wszystkie statki płyną torem
głębokowodnym.
Model statku: drobnicowiec uniwersalny M/V NEO (szczegółowe dane wykorzystywanego
modelu statku zostały zamieszczone w załączniku nr 6).
Nr statku
Szer. geogr.
Dł. geogr.
Kurs
Nastawa prędkości
Port przeznaczenia
OS 1.
55
o
47.0 N
010
o
49.0 E
000
o
WN – 6.8 w
Oslo
OS 2.
55
o
47.0 N
010
o
49.0 E
000
o
WN – 6.8 w
Oslo
OS 3.
55
o
47.0 N
010
o
49.0 E
000
o
WN – 6.8 w
Oslo
OS 4.
55
o
47.0 N
010
o
49.0 E
000
o
WN – 6.8 w
Oslo
OS 5.
55
o
47.0 N
010
o
49.0 E
000
o
WN – 6.8 w
Oslo
OS 6.
55
o
47.0 N
010
o
49.0 E
000
o
WN – 6.8 w
Oslo
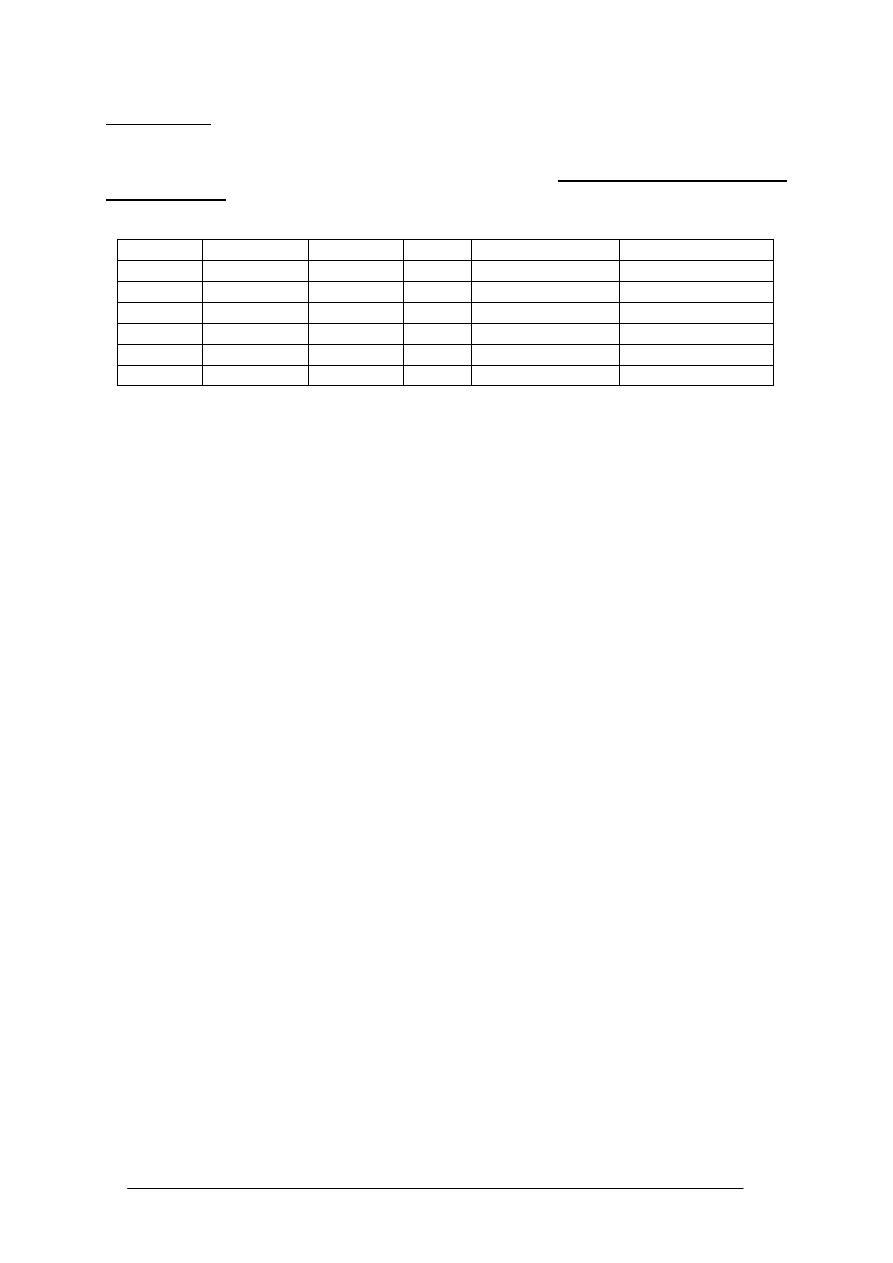
~ 46 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Ćwiczenie nr 2
Statki wzajemnie niewidoczne.
Ćwiczenia z linią brzegową – Hatter Barn. Pozycja wyjściowa
dla wszystkich statków znajduje się na południe od TSS. Wszystkie statki płyną torem
głębokowodnym.
Model statku: drobnicowiec uniwersalny M/V NEO (szczegółowe dane wykorzystywanego
modelu statku zostały zamieszczone w załączniku nr 6).
Nr statku
Szer. geogr.
Dł. geogr.
Kurs
Nastawa prędkości
Port przeznaczenia
OS 1.
55
o
58.0 N
011
o
00.9 E
216
o
WN – 6.8 w
Szczecin
OS 2.
55
o
55.2 N
010
o
56.4 E
250
o
WN – 6.8 w
Szczecin
OS 3.
55
o
46.3 N
010
o
49.0 E
000
o
WN – 6.8 w
Oslo
OS 4.
55
o
56.8 N
010
o
59.2 E
060
o
WN – 6.8 w
Oslo
OS 5.
55
o
50.0 N
010
o
49.0 E
355
o
WN – 6.8 w
Oslo
OS 6.
55
o
47.9 N
010
o
49.0 E
030
o
WN – 6.8 w
Oslo
WARUNKI ZALICZENIA
Warunkiem zaliczenia ćwiczenia jest:
prawidłowe zaplanowanie trasy statku
wypełnienie tabeli z pozycjami i parametrami prądów
znajomość i prawidłowe wykorzystanie funkcji ARPA
prawidłowe stosowanie przepisów MPDM.
EFEKTY KSZTAŁCENIA REALIZOWANE W TRAKCIE ĆWICZENIA
EK1:
Ma wiedzę z zakresu wymagań technicznych, zasad wykorzystania i ograniczeń syste-
mów z automatycznym śledzeniem ech.
EK2:
Potrafi w sposób efektywny wykorzystywać systemy radarowe z automatycznym
śledzeniem ech do pozyskiwania i analizy informacji o sytuacji kolizyjnej oraz podejmuje właściwe
i skuteczne decyzje antykolizyjne i nawigacyjne.
EK3:
Posiada umiejętność dowodzenia wachtą nawigacyjną, precyzyjnie wyznaczając zadania
członkom wachty oraz nadzorując prawidłowość ich wykonania.
INFORMACJE DODATKOWE
Opis włączenia i wykorzystania omawianych w trakcie ćwiczenia funkcji urządzeń ARPA
zawarty został w załącznikach zamieszczonych na końcu instrukcji do ćwiczeń:
ARPA Nucleus HR 6000
– zał. 2
ARPA Concept HR 3061
– zał. 3
ARPA DB 7
– zał. 4
ARPA DB 2000
– zał. 5

~ 47 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
10. ĆWICZENIE NR 8
TEMAT:
Testowanie urządzeń ARPA.
CEL I ZAKRES ĆWICZENIA
Celem ćwiczenia jest zapoznanie się z możliwościami testowania urządzeń ARPA oraz
lokalizacja usterek i nieprawidłowości w ich pracy.
CZĘŚĆ TEORETYCZNA
Podstawowym warunkiem prawidłowego wykorzystania konwencjonalnych radarów była
właściwa ich regulacja. W przypadku urządzeń bardziej skomplikowanych, których budowa opiera się
głównie na zastosowaniu układów komputerowych, pojawiła się konieczność sprawdzania
poprawności ich działania. W związku z tym wszystkie urządzenia ARPA zostały wyposażone w
pewien zestaw testów, które przeprowadzane są automatycznie z różną częstotliwością lub mogą być
przeprowadzone osobiście przez nawigatora.
Zgodnie z wymaganiami Rezolucji A.823(19) urzadzenie ARPA powinno generować właściwe
ostrzeżenia o uszkodzeniach, w celu zapewnienia operatorowi możliwości kontroli właściwej pracy
systemu. Dodatkowo powinny być dostępne programy testujące umożliwiające okresowe sprawdzenie
z określoną dokładnością parametrów eksploatacyjnych urządzenia. Jeśli zostanie uruchomiony
program testujący na ekranie powinien zostać wyświetlony określony symbol testu.
Część z tych testów jest wykonywana zawsze po włączeniu urządzenia. W zasadzie, jeśli
urządzenie jest gotowe do pracy i nie pojawił się żaden komunikat ani alarm, to znaczy, że wszystkie
testy przebiegły pozytywnie. Jeśli zostanie wykryte uszkodzenie systemu, operator jest powiadamiany
o tym fakcie za pośrednictwem odpowiedniego alarmu, a często podawany jest także powód
uszkodzenia, czy też jego numer (należy wtedy zobaczyć w instrukcji, co taki komunikat oznacza).
Należy sobie zdawać sprawę z tego, że cześć uszkodzeń może zostać nie wykryta np.
uszkodzenie wyświetlacza alfanumerycznego. W tym celu dostarczane są specjalne testy
umożliwiające dokładniejsze sprawdzenie poprawności działania wszystkich części systemu.
Procedury ich przeprowadzania są zwykle zawarte w instrukcjach obsługi, a ich dokładniejsza analiza
w tym miejscu, z uwagi na ogromne różnice między poszczególnymi urządzeniami, wydaje się
niecelowa. Warto jedynie zwrócić uwagę na to, że bardzo rozbudowany system testowania
zastosowała w swoich urządzeniach firma NORCONTROL, co wraz z bogatym opisem budowy,
rzeczywiście może być przydatne do ustalenia przyczyny nieprawidłowej pracy. W wielu przypadkach
jednak testy te są bardzo ograniczone, a postepowanie opisane w instrukcji obsługi kończy się uwagą
o konieczności wezwania serwisu.
PRZEBIEG ĆWICZENIA
Ćwiczenie polega na prezentacji możliwości testowania oraz konfiguracji parametrów pracy
poszczególnych urządzeń ARPA zainstalowanych w symulatorze QR-303 z uwzględnieniem
występujących różnic w realizacji omawianych funkcji. Testowanie odbywa się w oparciu o dostępną
dokumentację dostarczoną przez producentów urządzeń.
WARUNKI ZALICZENIA
Warunkiem zaliczenia ćwiczenia jest przygotowanie teoretyczne dot. zagadnień związanych z
testowaniem urządzeń ARPA i prawidłowa interpretacja uzyskanych wyników testów.
~ 48 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
EFEKTY KSZTAŁCENIA REALIZOWANE W TRAKCIE ĆWICZENIA
EK1:
Ma wiedzę z zakresu wymagań technicznych, zasad wykorzystania i ograniczeń syste-
mów z automatycznym śledzeniem ech.
INFORMACJE DODATKOWE
Opis włączenia i wykorzystania omawianych w trakcie ćwiczenia funkcji urządzeń ARPA
zawarty został w załącznikach zamieszczonych na końcu instrukcji do ćwiczeń:
ARPA Nucleus HR 6000
– zał. 2
ARPA Concept HR 3061
– zał. 3
ARPA DB 7
– zał. 4
ARPA DB 2000
– zał. 5

~ 49 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
10. LITERATURA
1. Bole A.G.: „Radar and ARPA Manual”. CIL, Great Britain 2002.
2. Juszkiewicz W., „ARPA radar z automatycznym śledzeniem echa” WSM Szczecin,
1995.
3. Kabaciński J. Trojanowski J.: ,,Wykorzystanie radaru w warunkach ograniczonej
widzialności”. WSM, Szczecin 1995.
4. Praca zbiorowa “Urządzenia radarowe w praktyce nawigacyjnej” 2010.
5. Rezolucja IMO A.823(19).
6. Rezolucja MSC 192(79).
7. Wawruch R.: ARPA zasada działania i wykorzystania. Dział Wydawnictw WSM
Gdynia 2002.
~ 50 ~
Akademia Morska w Szczecinie. Wszelkie prawa autorskie zastrzeżone.
Wyszukiwarka
Podobne podstrony:
2 Instrukcja do laboratorium układy sekwencyjne
Instrukcje do laboratoriów(1)
038 Rutery Wstęp teoretyczny, praktyczne aspekty konfiguracji, instrukcja do laboratorium
Optoelementy-instrukcja do laboratorium, Lotnictwo, Elektro
Z03 prost spice, Instrukcja do laboratorium zasilania trakcji elektrycznej
Instrukcja do laboratorium
instrukcja 06, sem 3, Podstawy elektrotechniki i elektroniki, Laboratoria, instrukcje do cwiczen 201
Instrukcja do ćwiczenia laboratoryjnego PDH
instrukcja 09, sem 3, Podstawy elektrotechniki i elektroniki, Laboratoria, instrukcje do cwiczen 201
instrukcje do sprawozdań, cw8 przerzutniki, Laboratorium
instrukcje do cwiczen laboratoryjnych 2011, WSZOP INŻ BHP, V Semestr, TOKSYKOLOGIA
Instrukcja do I cz ci badania
instrukcje do sprawozdań, cw5 bramki logiczne, Laboratorium
Oczyszczanie wody instrukcja do ćwiczeń laboratoryjnych
LABORKA, instrukcje do cwiczen laboratoryjnych PCAE AiR
instrukcja 01, sem 3, Podstawy elektrotechniki i elektroniki, Laboratoria, instrukcje do cwiczen 201
instrukcja 03, sem 3, Podstawy elektrotechniki i elektroniki, Laboratoria, instrukcje do cwiczen 201
więcej podobnych podstron