
POLITECHNIKA GDAŃSKA
Wydział Elektrotechniki i Automatyki
Katedra Energoelektroniki i Maszyn Elektrycznych
MATERIAŁY POMOCNICZE DO LABORATORIUM
M A S Z Y N Y E L E K T R Y C Z N E I I
PODSTAWY DYNAMIKI MASZYN ELEKTRYCZNYCH
Kier. Elektrotechnika, studia mgr, sem. V
TEMATYKA ĆWICZENIA
BADANIE DYNAMIKI SILNIKA PRĄDU STAŁEGO
POMIARY KOMPUTEROWE
(wersja a)
Mieczysław RONKOWSKI
Marek KAMIŃSKI
Grzegorz KOSTRO
Michał MICHNA
Tomasz WRÓBLEWSKI
GDAŃSK 2001

M. RONKOWSKI, M. KAMIŃSKI, G. KOSTRO, M. MICHNA, T. WRÓBLEWSKI
2
ĆWICZENIE
BADANIE DYNAMIKI SILNIKA PRĄDU STAŁEGO
POMIARY KOMPUTEROWE
Program ćwiczenia
1.
CEL ĆWICZENIA .................................................................................................................. 2
2.
RZUT OKA NA ZASTOSOWANE KOMPUTEROWE TECHNIKI POMIAROWE ................... 2
3.
BADANIA DOŚWIADCZALNE WYBRANYCH STANÓW PRACY DYNAMICZNEJ SILNIKA 3
3.1.
Oględziny zewnętrzne ........................................................................................................ 3
3.2.
Badanie rozruchu silnika przy braku obciążenia na wale.................................................... 3
3.3.
Badanie rozruchu silnika przy obciążeniu na wale.............................................................. 7
4.
PYTANIA KONTROLNE........................................................................................................ 9
5.
ZADANIA ............................................................................................................................ 10
6.
SPRAWOZDANIE ............................................................................................................... 10
7.
LITERATURA...................................................................................................................... 11
1. CEL
ĆWICZENIA
Celem ćwiczenia jest:
•
opanowanie zastosowania komputerowych technik pomiarowych do badania właściwości
dynamicznych silnika prądu stałego (obcowzbudnego);
•
wykonanie badań doświadczalnych wybranych stanów pracy dynamicznej silnika prądu stałego:
! rozruchu silnika przy braku obciążenia na wale (załączanie napięcia stałego do obwodu twornika
przy otwartym „obwodzie mechanicznym”),
! rozruchu silnika przy obciążeniu na wale (załączanie napięcia stałego do obwodu twornika przy
obciążonym „obwodzie mechanicznym”),
•
porównanie wyników badań symulacyjnych z wynikami badań doświadczalnych.
2.
RZUT OKA NA ZASTOSOWANE KOMPUTEROWE TECHNIKI POMIAROWE
Przebiegi czasowe wielkości charakterystycznych dla stanów dynamicznych silnika prądu stałego a
mogą być rejestrowane za pomocą dwóch układów pomiarowych (do wyboru):
•
4-ro kanałowy oscyloskop cyfrowy firmy Tektronix ze złączem GPIB oraz komputer PC wyposażony
w kartę GPIB do zapisu wyników pomiarów na dysku;
•
komputer PC wyposażony w kartę pomiarową typu PCI-MIO-16E-4 firmy National Instruments.
Układ pierwszy jest układem klasycznym, więc nie wymaga wyjaśnienia zasady jego działania. W
przypadku układu drugiego „sercem” jest wymieniona karta pomiarowa, która posiada:
•
16 pojedynczych lub 8 różnicowych wejściowo/wyjściowych kanałów analogowych przy czym:
o
maksymalne napięcie pracy
±
11 [V] przy zabezpieczeniach przepięciowych
±
25 [V],
o
FIFO bufer (rozmiar kolejki) 512 [S],
o
przetwornik analogowo–cyfrowy 12 bitowy,
o
częstotliwość próbkowania 500 [kS/s];
•
2 analogowe wyjścia 12 bitowe;
•
8 wejściowo/wyjściowych kanałów cyfrowych;
•
2 wyjścia czasowe;
•
1 wyjście zewnętrznego wyzwalania.
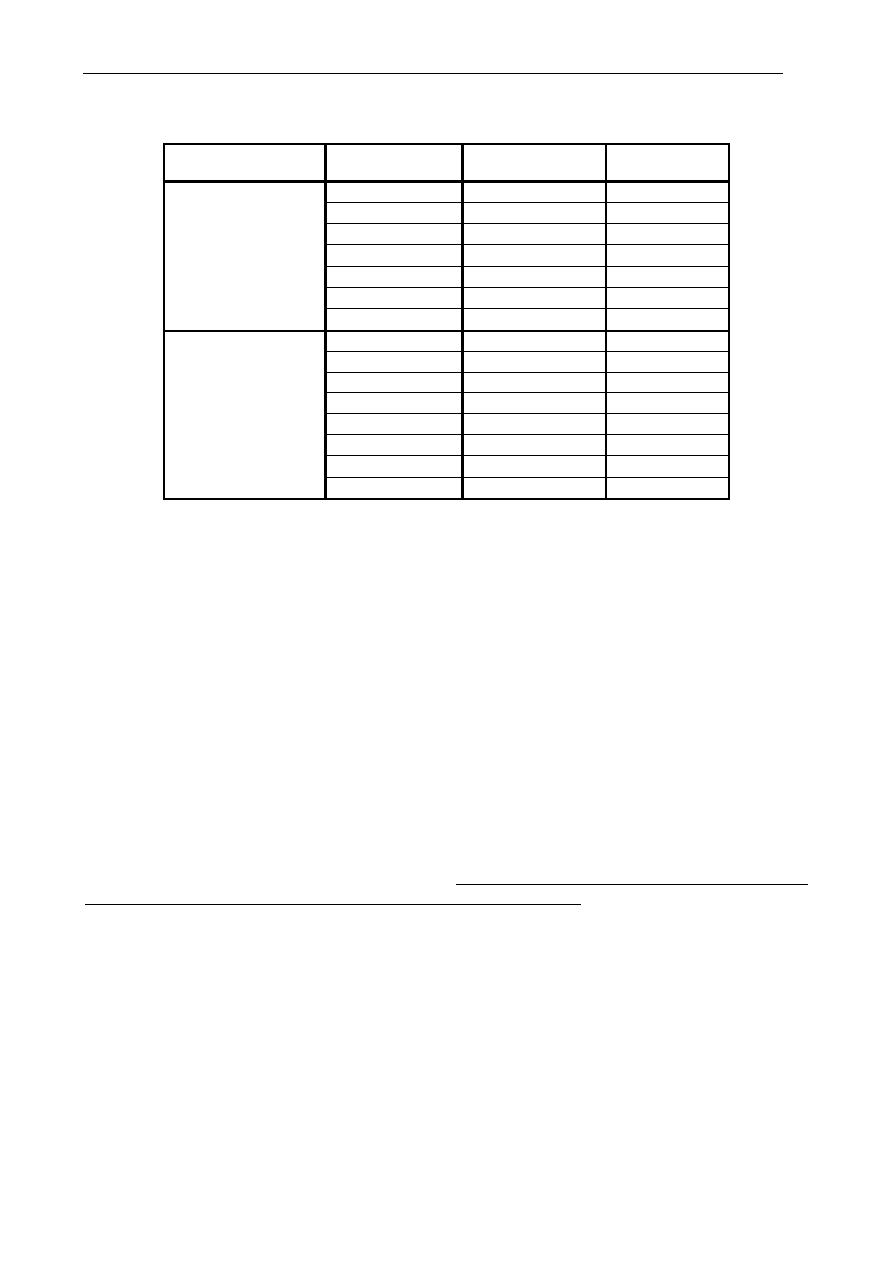
Rozdzielczość karty PCI-MIO-16E-4 wynika z zastosowania 12 bitowego przetwornika A/C (4096
poziomów dla danego zakresu). W tabeli 1 przedstawiono zakres pomiarowy oraz dokładności karty w
zależności od przyjętego wzmocnienia.
Ćwiczenie: BADANIE DYNAMIKI SILNIKA PRĄDU STAŁEGO. Pomiary komputerowe
3
Tablica 1. Zakresy pomiarowe karty PCI-MIO-16E-4 firmy National Instruments
KONFIGURACJA
ZAKRESU
WZMOCNIENIE ZAKRES
POMIAROWY
DOKŁADNOŚĆ
1.0
0 do +10 V
2.44 mV
2.0
0 do +5 V
1.22 mV
5.0
0 do +2 V
488.28
µ
V
10.0
0 do +1 V
244.18
µ
V
20.0
0 do +500 mV
122.07
µ
V
50.0
0 do +200 mV
48.83
µ
V
0 do +10 V
100.0
0 do +100 mV
24.41
µ
V
0.5 -10 do +10 V
4.88 mV
1.0
-5 do +5 V
2.44 mV
2.0
-2.5 do +2.5 V
1.22 mV
5.0 -1 do +1 V
488.28
µ
V
10.0
-500 do +500 mV
244.18
µ
V
20.0
-250 do +250 mV
122.07
µ
V
50.0 -100 do +100 mV
48.83
µ
V
0 do +10 V
100.0
-50 do +50 mV
24.41
µ
V
Zasady doboru częstotliwości próbkowania i skanowania:
•
dostępny zakres częstotliwości: 0,00153 – 500 000 pts/s dla jednego kanału;
•
maksymalna częstotliwość próbkowania zmniejsza się tylokrotnie ile chcemy skanować kanałów;
•
należy tak dobrać obie częstotliwości by zachować minimalny czas pomiędzy odczytem ostatniego
kanału w jednej sekwencji skanowania, a odczytem pierwszego kanału następnej sekwencji (
∆
t
Scan
) (dla
karty PCI-MIO-16E-4 czas ten wynosi
∆
t
Samp
= 4
µ
s);
•
należy uwzględnić dłuższy czas opóźnienia międzykanałowego, w przypadku zmiany wzmocnienia w
dwóch sąsiednich kanałach na wyższą.
Dalsze szczegóły dotyczące zasad pomiaru z zastosowaniem karty pomiarowej typu PCI-MIO-16E-4
opisano w „Instrukcja Programu NIDAQScope rejestracji pomiarów z zastosowaniem karty pomiarowej
National Instruments MIO-PCI 16E4 i komputera PC” (dostępna na:
www.ely.pg.gda.pl/keime/maszyny
).
3. BADANIA
DOŚWIADCZALNE WYBRANYCH STANÓW PRACY DYNAMICZNEJ
SILNIKA
3.1. Oględziny zewnętrzne
Dokonać oględzin zewnętrznych badanego silnika prądu stałego i urządzeń wchodzących w skład
układu pomiarowego. Należy, przede wszystkim, dokładnie zanotować dane zawarte w tabliczce
znamionowej silnika oraz wartości parametrów modelu obwodowego (patrz instrukcja do ćwiczenia
„Maszyny prądu stałego: Badanie silników” Laboratorium ME I sem. IV oraz instrukcja do części A
niniejszego ćwiczenia).
3.2. Badanie rozruchu silnika przy braku obciążenia na wale
Badanie rozruchu silnika polega na wykonaniu kolejno czynności:
•
załączeniu stałego napięcia zasilania do obwodu wzbudzenia i ustawieniu prądu wzbudzenia silnika
wg zadanej wartości;
•
załączeniu skokowym stałego napięcia zasilania do obwodu twornika przy braku obciążenia na wale
(otwarty „obwód mechaniczny”) i zerowej początkowej prędkości obrotowej;
•
rejestracji przebiegów czasowych: napięcia i prądu twornika, prądu wzbudzenia i prędkości
obrotowej;
•
pomiarze wartości ustalonych: napięcia i prądu twornika, prądu wzbudzenia i prędkości obrotowej.
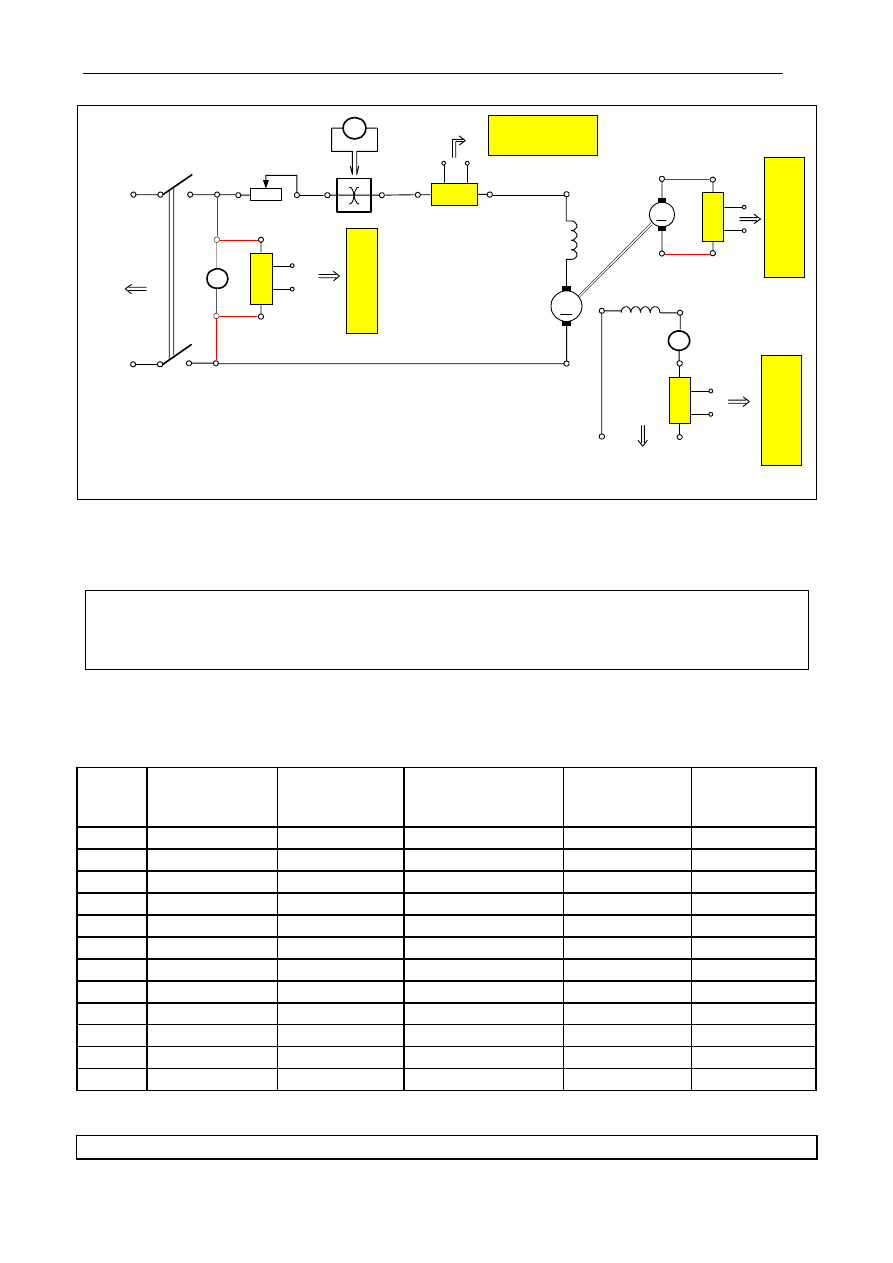
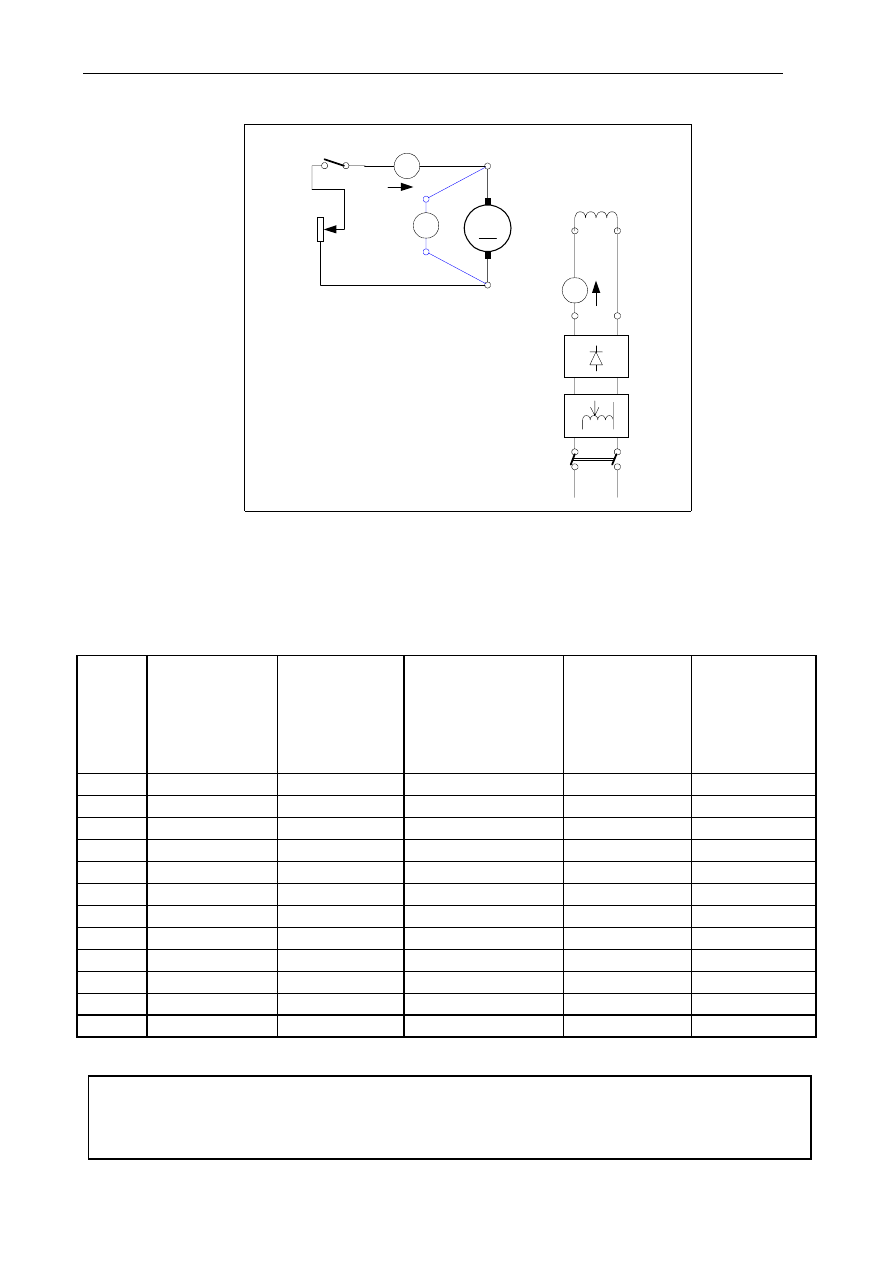
Schemat układu pomiarowego do badania rozruchu silnika przedstawiono na rys. 1.
M. RONKOWSKI, M. KAMIŃSKI, G. KOSTRO, M. MICHNA, T. WRÓBLEWSKI
4
R
d
I
a
ST
B2
A1
E1
E2
I
f
A
LEM(I)
A
Do źródła napięcia
stałego
Do
źród
ła napi
ęcia
sta
łego
M
LEM(I)
LEM(U)
u
a
V
Karta pomiarowa
(oscyloskop)
Karta pomiarowa
(oscyloskop)
Karta pomiarowa
(oscyloskop)
LEM(U)
Karta pomiarowa
(oscyloskop)
TP
i
a
i
f
U
a
Rys. 1. Schemat połączeń układu pomiarowego do badania dynamiki rozruchu silnika prądu stałego
(obcowzbudnego) przy braku obciążenia na wale
Uwaga:
Zakresy pomiarowe użytych mierników i przetworników typu LEM należy dobrać stosownie do:
•
danych znamionowych badanego silnika;
•
dopuszczalnego zakresu amplitudy sygnałów na wejściu użytej karty pomiarowej lub
oscyloskopu.
Pomiary próby rozruchu należy wykonać dla przypadków podanych w tablicy 1.
Tablica 1. Warunki rozruchu silnika prądu stałego obcowzbudnego
Numer
próby
Prąd wzbudzenia
I
f
Napięcie
twornika
U
a
Krotność udarowego
prądu rozruchowego
k
Iaud
Moment
obciążenia
T
L
Rezystancja
dodatkowa
R
d
1
I
f
= I
fn
U
a
= U
an
k
Iaud
<
3
0
wg wzoru (1)
2
I
f
>
I
fn
U
a
= U
an
k
Iaud
<
3
0
wg wzoru (1)
3
I
f
<
I
fn
U
a
= U
an
k
Iaud
<
3
0
wg wzoru (1)
4
I
f
= I
fn
U
a
= U
an
k
Iaud
<
6
0
wg wzoru (1)
5
I
f
>
I
fn
U
a
= U
an
k
Iaud
<
6
0
wg wzoru (1)
6
I
f
<
I
fn
U
a
= U
an
k
Iaud
<
6
0
wg wzoru (1)
7
I
f
= I
fn
U
a
<
0,20U
an
k
Iaud
<
6
0 0
8
I
f
>
I
fn
U
a
<
0,20U
an
k
Iaud
<
6
0 0
9
I
f
<
I
fn
U
a
<
0,20U
an
k
Iaud
<
6
0 0
10
I
f
= I
fn
U
a
<
0,25U
an
k
Iaud
<
10
0 0
11
I
f
>
I
fn
U
a
<
0,25U
an
k
Iaud
<
10
0 0
12
I
f
<
I
fn
U
a
<
0,25U
an
k
Iaud
<
10
0 0
Uwaga:
Próby od nr 7 do 12 należy wykonać przy zasilaniu obwodu twornika z baterii akumulatorów.
Ćwiczenie: BADANIE DYNAMIKI SILNIKA PRĄDU STAŁEGO. Pomiary komputerowe
5
Uwaga:
Po zakończeniu rozruchu należy zanotować wartości ustalone:
•
napięcia zasilania twornika
U
aus
=................... [V]
•
prądu twornika
I
aus
= ................... [A]
•
prądu wzbudzenia
I
fus
= .................... [A]
•
prędkości obrotowej
n
us
= .................... [obr/min]
•
rezystancji dodatkowej
R
d
=..................... [
Ω
]
Celem ograniczenia wartości prądu rozruchowego silnika należy dobrać odpowiednią wartość rezystancji
dodatkowej R
d
wg zależności:
a
an
Iaud
a
d
R
I
k
U
R
−
≥
(1)
gdzie: U
a
– wartość napięcie zasilania twornika; I
an
– znamionowa wartość prądu twornika badanego silnika;
R
a
– rezystancja obwodu twornika badanego silnika, k
Iaud
= I
aud
/ I
an
- krotność udarowego prądu
rozruchowego silnika, określona jako stosunek udarowego prądu rozruchowego do prądu znamionowego
twornika silnika.
Uwagi:
•
Ograniczenie wartości prądu rozruchowego silnika prądu stałego wynika z niebezpieczeństwa
powstania nadmiernego iskrzenia zestyku ślizgowego szczotki-komutator, które może
doprowadzić do powstania łuku elektrycznego (ognia) na komutatorze – w efekcie do
uszkodzenia a nawet do zniszczenia komutatora.
•
W zastosowaniach praktycznych zaleca się krotność ustalonego prądu rozruchowego k
Iaus
≤
2.
•
Ograniczenie wartości udarowej prądu rozruchowego silnika może także wynikać z zakresu
pomiarowego użytych przetworników LEM.
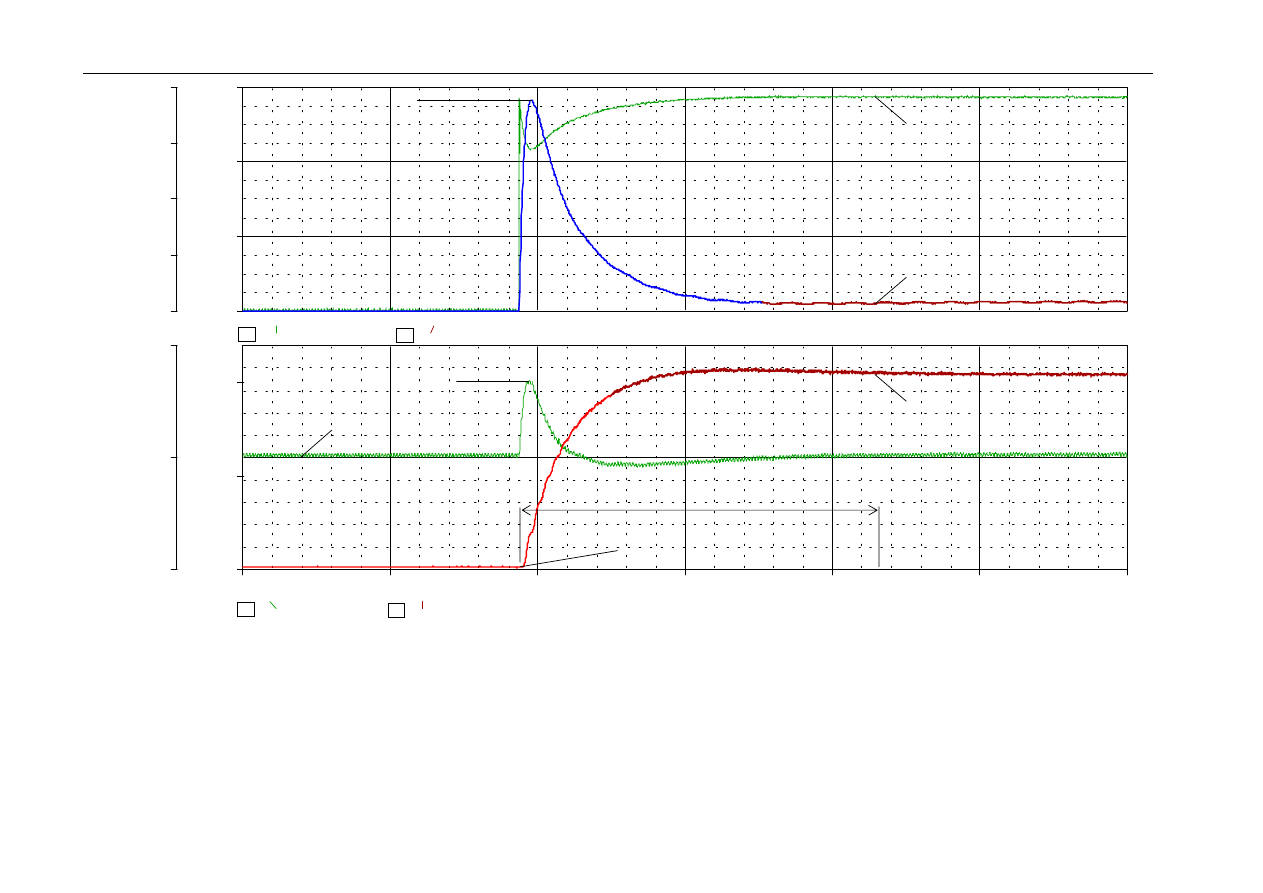
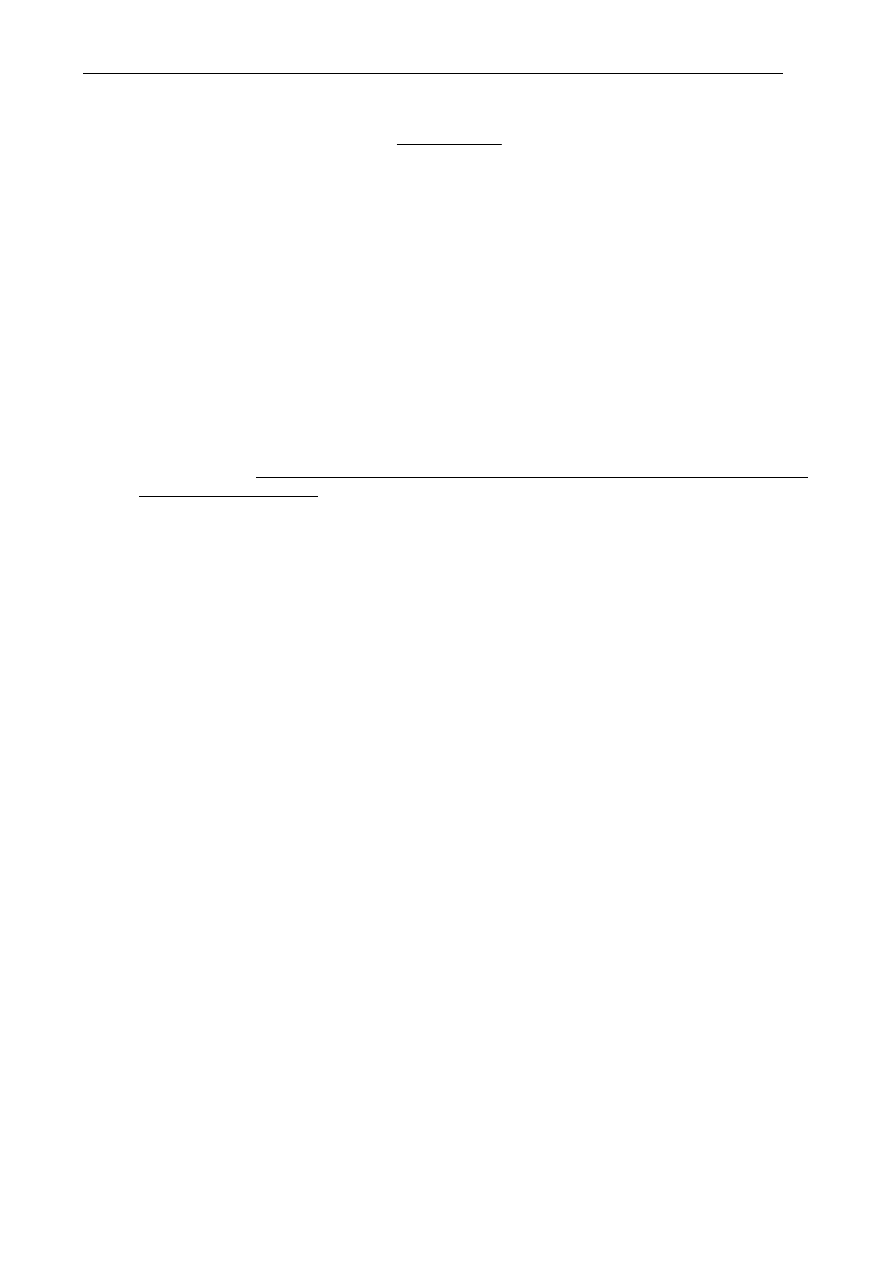
Rys. 2 przedstawia przykład zarejestrowanych i odpowiednio opracowanych przebiegów, które są
charakterystyczne dla dynamiki rozruchu silnika prądu stałego (obcowzbudnego) przy braku obciążenia na
wale.
Uwagi do rys. 2:
•
Przebiegi zarejestrowano w układzie pomiarowym: karta PCI-MIO-16E-4 oraz komputer PC.
•
Przebiegi wykreślono i opracowano za pomocą procesora graficznego PROBE symulatora
PSPICE.
•
Zarejestrowane przebiegi czasowe na wyjściu przetworników LEM są odpowiednio
przeskalowane. I tak:
#
dla przebiegów prądowych wg relacji:
Wartość liczbowa przebiegu prądowego w [A] = zarejestrowana wartość liczbowa
przebiegu prądowego w [V] na wyjściu przetwornika LEM * współczynnik transformacji
przetwornika LEM w [A/V]
#
dla przebiegów napięciowych wg relacji:
Wartość liczbowa przebiegu napięciowego w [V] = zarejestrowana wartość liczbowa
przebiegu napięciowego w [V] na wyjściu przetwornika LEM * współczynnik
transformacji przetwornika LEM w [V/V]
•
Czas t (time) jest rejestrowany bezpośrednio w sekundach!
•
Wartości ustalone i udarowe (maksymalne) wielkości mierzonych należy odnieść do wartości
znamionowych silnika (np. na rys. 2 dla wartości udarowej prądu twornika podano: I
aud
=
9.438 I
an
)
•
Na podstawie zarejestrowanych przebiegów należy określić czas rozruchu silnika (np. na rys.
2 podano t
r
= 1.205 [s]).
M. RONKOWSKI, M. KAMIŃSKI, G. KOSTRO, M. MICHNA, T. WRÓBLEWSKI
6
Time
0s
0.5s
1.0s
1.5s
2.0s
2.5s
3.0s
1
Chan1*2.563 2
(Chan3/140.3m)*522
0
0.5
1.0
1
SEL>>
0
250
500
2
SEL>>
nus = 522 obr/min
tr = 1.205 s
Ifus = 1.302 Ifn
(941.000m,7.7202)
(969.234m,839.378m)
(198.000m,501.323m)
(2.1458,522.372)
1
Chan0*330.54 2
Chan2*31.342
0
12.5
25.0
37.5
50.0
1
0
50
100
150
2
>>
Iaus = 0.337Ian
Uaus = 0.218Uan
Iaud = 9.438Ian
Ia = 0
Ua = 0
(980.000m,141.572)
(2.1450,5.0492)
(2.1450,48.028)
Rys. 2. Przykład zarejestrowanych i odpowiednio opracowanych przebiegów czasowych dynamiki rozruchu silnika prądu stałego (obcowzbudnego) przy braku
obciążenia na wale:
Chan0 - napięcia zasilania twornika [V], Chan1 - prąd wzbudzenia [A], Chan2 - prąd twornika [A], Chan3 - prędkość obrotowa [obr/min]
Moment elektromagnetyczny silnika jest opisany zależnością:
a
f
f
af
e
i
i
i
G
T
)
(
=
gdzie, G
af
(i
f
) – indukcyjność rotacji zależna o prądu wzbudzenia silnika i
f
, i
a
– prąd twornika silnika.
Zatem przy założeniu stałej wartości i
f
i pominięciu oddziaływania twornika moment silnika jest opisany
zależnością
a
e
i
T ~
, czyli jest proporcjonalny do prądu twornika (przebiegu chan2*31.342).
Ćwiczenie: BADANIE DYNAMIKI SILNIKA PRĄDU STAŁEGO. Pomiary komputerowe
7
Np. dla wielkości zarejestrowanej w kanale „0” (chan0 = napięcia zasilania twornika) przeskalowanie
wykonano za pomocą odpowiednich opcji procesora graficznego PROBE, które umożliwiają wykonanie
wielu operacji, np. mnożenia, dzielenia zmiennej przez wielkość stałą; całkowania, różniczkowania
zmiennej; itp.. Zatem przeskalowanie napięcia twornika ma postać:
330.54
*
0
chan
u
a
=
[V]
gdzie,
liczba 330.54 = współczynnik transformacji zastosowanego przetwornika LEM w [V/V].
Do przeskalowania prędkości obrotowej n (zarejestrowanej w chan3 ), ze względu na problemy dokładnego
określenia stałej prądniczki tachometrycznej, wybrano następujący sposób:
522
140.3m *
)
/
3
(chan
n
=
[obr/min]
gdzie,
liczba 140.3m = wartość ustalona przebiegu napięciowego na wyjściu przetwornika LEM w [mV],
odczytana bezpośrednio na wykresie zmiennej za
pomocą
opcji Cursor procesora graficznego
PROBE
;
liczba 522 = wartość ustalona prędkości obrotowej n
us
, odczytana bezpośrednio na obrotomierzu w
[obr/min].
Analogicznie jak przebieg
prędkości obrotowej
można przeskalować inne przebiegi zarejestrowane,
szczególnie w przypadku braku wartości współczynnika transformacji zastosowanego przetwornika
LEM.
3.3. Badanie rozruchu silnika przy obciążeniu na wale
Badanie rozruchu silnika polega na wykonaniu kolejno czynności:
•
załączeniu stałego napięcia zasilania do obwodu wzbudzenia i ustawieniu prądu wzbudzenia silnika
(wg zadanej wartości) i prądu wzbudzenia prądnicy;
•
załączeniu skokowym stałego napięcia zasilania do obwodu twornika przy obciążenia na wale
(obciążony „obwód mechaniczny”, tzn. dodatkowa maszyna prądu stałego jest sprzężona
mechanicznie z badanym silnikiem i pracujące jako prądnica) i zerowej początkowej prędkości
obrotowej;
•
rejestracji przebiegów czasowych: napięcia i prądu twornika, prądu wzbudzenia i prędkości
obrotowej;
•
pomiarze wartości ustalonych: napięcia i prądu twornika, prądu wzbudzenia i prędkości obrotowej.
Schemat układu pomiarowego do badania rozruchu silnika (pokazany na rys. 1) należy uzupełnić o układ
połączeń dodatkowej maszyny prądu stałego (pokazany na rys. 3), pracującej jako prądnica i obciążonej
rezystancją R
o
.
Pomiary próby rozruchu należy wykonać dla przypadków podanych w tablicy 2.
Uwagi:
•
Jako miarę obciążenia badanego silnika należy przyjąć wartość jego prądu twornika w
stanie ustalonym I
aus
, która jest odniesiona do znamionowego prądu twornika.
•
Wartość prądu twornika I
aus
badanego silnika ustala się za pomocą rezystancji obciążenia
R
o
lub/i prądu wzbudzenia prądnicy I
fp
(patrz rys. 3).
Można przyjąć, przy pominięciu strat mechanicznych i strat na prądy wirowe, że moment obciążenia silnika
T
L
jest praktycznie równy momentowi elektromagnetycznemu silnika T
e
:
a
f
f
af
e
L
i
I
I
G
T
T
)
(
=
≅
(2)
gdzie, G
af
(I
f
) – indukcyjność rotacji silnika zależna o prądu wzbudzenia silnika I
f
, i
a
– prąd twornika silnika.
Z kolei można przyjąć, przy pominięciu strat mechanicznych i strat na prądy wirowe prądnicy, że moment
obciążenia silnika, jest praktycznie równy momentowi elektromagnetycznemu prądnicy:
ap
fp
fp
afp
ep
L
i
I
I
G
T
T
)
(
=
≅
(3)
M. RONKOWSKI, M. KAMIŃSKI, G. KOSTRO, M. MICHNA, T. WRÓBLEWSKI
8
gdzie, G
afp
(I
fp
) – indukcyjność rotacji prądnicy zależna o prądu wzbudzenia prądnicy I
fp
, i
ap
– prąd twornika
prądnicy.
A
AT
+
-
E1
E2
G
A1
B2
V
I
fp
W2
P
A
I
ap
U
ap
R
o
W3
Rys. 3. Schemat połączeń maszyny prądu stałego pracującej jako prądnica obciążona rezystancją R
o
(maszyna służy jako obciążenie badanego silnika w układzie pomiarowym pokazanym rys. 1)
Tablica 2. Warunki zasilania i obciążenia silnika prądu stałego (obcowzbudnego) przy próbie rozruchu
Numer
próby
Prąd wzbudzenia
I
f
Napięcie
twornika
U
a
Krotność udarowego
prądu rozruchowego
k
Iaud
Moment
obciążenia
wg ustalonego
prądu twornika
silnika
T
L
~ I
aus
Rezystancja
dodatkowa
R
d
1
I
f
= I
fn
U
a
= U
an
k
Iaud
<
3
I
aus
= I
an
wg wzoru (1)
2
I
f
>
I
fn
U
a
= U
an
k
Iaud
<
3
I
aus
= I
an
wg wzoru (1)
3
I
f
<
I
fn
U
a
= U
an
k
Iaud
<
3
I
aus
= I
an
wg wzoru (1)
4
I
f
= I
fn
U
a
= U
an
k
Iaud
<
6
I
aus
= I
an
wg wzoru (1)
5
I
f
>
I
fn
U
a
= U
an
k
Iaud
<
6
I
aus
= I
an
wg wzoru (1)
6
I
f
<
I
fn
U
a
= U
an
k
Iaud
<
6
I
aus
= I
an
wg wzoru (1)
7
I
f
= I
fn
U
a
<
0,20U
an
k
Iaud
<
6
I
aus
= 0,5I
an
0
8
I
f
>
I
fn
U
a
<
0,20U
an
k
Iaud
<
6
I
aus
= 0,5I
an
0
9
I
f
<
I
fn
U
a
<
0,20U
an
k
Iaud
<
6
I
aus
= 0,5I
an
0
10
I
f
= I
fn
U
a
<
0,25U
an
k
Iaud
<
10
I
aus
= 0,5I
an
0
11
I
f
>
I
fn
U
a
<
0,25U
an
k
Iaud
<
10
I
aus
= 0,5I
an
0
12
I
f
<
I
fn
U
a
<
0,25U
an
k
Iaud
<
10
I
aus
= 0,5I
an
0
Uwagi:
•
Celem ograniczenia wartości prądu rozruchowego silnika należy dobrać odpowiednią
wartość rezystancji dodatkowej R
d
wg zależności (1).
•
Próbę nr od 7 do 12 należy wykonać przy zasilaniu obwodu twornika z baterii
akumulatorów.
Ćwiczenie: BADANIE DYNAMIKI SILNIKA PRĄDU STAŁEGO. Pomiary komputerowe
9
Uwzględniając )
/(
o
a
ap
ap
R
R
e
i
+
=
oraz
rm
fp
fp
afp
ap
I
I
G
e
ω
)
(
=
wyrażenie (3) przyjmie postać:
rm
o
ap
fp
fp
afp
L
R
R
I
I
G
T
ω
)
)
(
(
2
+
≅
(4)
gdzie, R
ap
– rezystancja twornika prądnicy, R
o
– rezystancja obciążenia prądnicy,
ω
rm
- prędkość obrotowa
silnika (prądnicy).
Z kolei przy I
fp
= const., R
o
= const. i pominięciu oddziaływania twornika wyrażenie (4) można
zapisać w postaci:
rm
L
T
ω
~
(5)
Zatem moment obciążenia silnika jest proporcjonalny do prędkości obrotowej silnika (prądnicy).
4. PYTANIA
KONTROLNE
1. Podać i omówić schemat połączeń układu pomiarowego do badania przebiegów czasowych
rozruchu silnika prądu stałego (obcowzbudnego) przy braku obciążenia na wale.
2. Podać i omówić schemat połączeń układu pomiarowego do badania przebiegów czasowych
rozruchu silnika prądu stałego (obcowzbudnego) przy obciążeniu na wale.
3. Podać i uzasadnić przebiegi prądu rozruchowego (twornika) i prędkości obrotowej silnika prądu
stałego (obcowzbudnego) przy braku obciążenia na wale. Rozważyć przypadek rozruchu
bezpośredniego (znamionowe napięcie twornika, znamionowy prąd wzbudzenia, brak rezystancji
dodatkowej - rozruchowej). Posłużyć się przebiegami uzyskanymi metodą symulacyjną (program
PSPICE). Wyróżnić trzy przypadki relacji między stałymi czasowymi silnika. Czy stałe czasowe
mają wpływ na czas rozruchu?
4. Podać i uzasadnić przebiegi prądu rozruchowego (twornika) i prędkości obrotowej silnika prądu
stałego (obcowzbudnego) przy braku obciążenia na wale. Rozważyć przypadek rozruchu przy
napięciu twornika U
a
= 0,5U
an
. Posłużyć się przebiegami uzyskanymi metodą symulacyjną (program
PSPICE). Wyróżnić trzy przypadki relacji między stałymi czasowymi silnika. Jak jest efekt
obniżenia napięcia? Czy ma ono wpływ na stałe czasowe przebiegów i czas rozruchu?
5. Podać i uzasadnić przebiegi prądu rozruchowego (twornika) i prędkości obrotowej silnika prądu
stałego (obcowzbudnego) przy braku obciążenia na wale. Rozważyć przypadek rozruchu z
rezystancją dodatkową w obwodzie twornika. Posłużyć się przebiegami uzyskanymi metodą
symulacyjną (program PSPICE). Omówić wpływ stałych czasowych silnika na charakter
przebiegów. Jak jest efekt rezystancji dodatkowej? Czy ma ona wpływ na stałe czasowe przebiegów
oraz na czas rozruchu?
6. Podać i uzasadnić przebiegi momentu elektromagnetycznego i prędkości obrotowej silnika prądu
stałego (obcowzbudnego) przy braku obciążenia na wale. Rozważyć przypadek rozruchu
bezpośredniego. Posłużyć się przebiegami uzyskanymi metodą symulacyjną (program PSPICE).
Wyróżnić trzy przypadki relacji między stałymi czasowymi silnika. Czy stałe czasowe mają wpływ
na czas rozruchu?
7. Podać i uzasadnić przebiegi momentu elektromagnetycznego i prędkości obrotowej silnika prądu
stałego (obcowzbudnego) przy braku obciążenia na wale. Rozważyć przypadek rozruchu przy
napięciu twornika U
a
= 0,5U
an
. Posłużyć się przebiegami uzyskanymi metodą symulacyjną (program
PSPICE). Wyróżnić trzy przypadki relacji między stałymi czasowymi silnika. Jak jest efekt
obniżenia napięcia? Czy ma ono wpływ na stałe czasowe przebiegów i czas rozruchu?
8. Podać i uzasadnić przebiegi momentu elektromagnetycznego i prędkości obrotowej silnika prądu
stałego (obcowzbudnego) przy braku obciążenia na wale. Rozważyć przypadek rozruchu z
rezystancją dodatkową w obwodzie twornika. Posłużyć się przebiegami uzyskanymi metodą
symulacyjną (program PSPICE). Omówić wpływ stałych czasowych silnika na charakter
przebiegów. Jak jest efekt rezystancji dodatkowej i czy ma ona wpływ na stałe czasowe przebiegów
oraz na czas rozruchu?
9. Podać i uzasadnić przebiegi prądu rozruchowego (twornika) i prędkości obrotowej silnika prądu
stałego (obcowzbudnego) przy braku obciążenia na wale. Rozważyć przypadki rozruchu
bezpośredniego przy trzech wartościach prądu wzbudzenia: I
f
= I
fn
, I
f
> I
fn
, I
f
< I
fn
. Posłużyć się
przebiegami uzyskanymi metodą symulacyjną (program PSPICE). Jak jest efekt zmiany wartości
prądu wzbudzenia? Czy ma ona wpływ na stałe czasowe przebiegów oraz na czas rozruchu?

M. RONKOWSKI, M. KAMIŃSKI, G. KOSTRO, M. MICHNA, T. WRÓBLEWSKI
10
10. Podać i uzasadnić przebiegi momentu elektromagnetycznego i prędkości obrotowej silnika prądu
stałego (obcowzbudnego) przy braku obciążenia na wale. Rozważyć przypadki rozruchu
bezpośredniego przy trzech wartościach prądu wzbudzenia: I
f
= I
fn
, I
f
> I
fn
, I
f
< I
fn
. Posłużyć się
przebiegami uzyskanymi metodą symulacyjną (program PSPICE). Jak jest efekt zmiany wartości
prądu wzbudzenia? Czy ma ona wpływ na stałe czasowe przebiegów oraz na czas rozruchu?
11. Podać metody ograniczania wartości prądu rozruchowego silnika prądu stałego (obcowzbudnego).
Jakie są powody jego ograniczania? Jakie zaleca się krotność ustalonego prądu rozruchowego w
zastosowaniach praktycznych? Podać sposób szacowania wartości udarowego prądu rozruchowego.
5. ZADANIA
1. Na podstawie wyników pomiaru rozruchu badanego silnika prądu stałego (obcowzbudnego) przy
braku obciążenia na wale (otwarty „obwód mechaniczny”):
•
wykreślić przebiegi czasowe: napięcia i prądu twornika, momentu elektromagnetycznego
(wyliczyć wg wzoru (3)),
prądu wzbudzenia i prędkości obrotowej;
•
uzasadnić fizyczne i analitycznie charakter pomierzonych przebiegów;
•
wyznaczyć wartości udarowe i ustalone: napięcia i prądu twornika, momentu
elektromagnetycznego (wyliczyć wg wzoru (3)),
prądu wzbudzenia i prędkości obrotowej;
•
wyznaczyć czas rozruchu i porównać go ze stałymi czasowymi silnika (elektromagnetyczną i
elektromechaniczną) oraz stałą rozruchową silnika, podać przyczyny rozbieżności.
Na podstawie dynamicznego modelu obwodowego silnika o danych wartościach parametrów
modelu obwodowego:
•
obliczyć „ręcznie” (oszacować) wartości udarowe i ustalone: prądu twornika, momentu
elektromagnetycznego (wyliczyć wg wzoru (3)),
prądu wzbudzenia i prędkości obrotowej.
•
porównać z wynikami wyznaczonymi doświadczalnie, podać przyczyny rozbieżności.
2. Na podstawie wyników pomiaru rozruchu badanego silnika prądu stałego (obcowzbudnego) przy
obciążeniu na wale (obciążony „obwód mechaniczny”):
•
wykreślić przebiegi czasowe: napięcia i prądu twornika, momentu elektromagnetycznego
(wyliczyć wg wzoru (3)),
prądu wzbudzenia i prędkości obrotowej;
•
uzasadnić fizyczne i analitycznie charakter pomierzonych przebiegów;
•
wyznaczyć wartości udarowe i ustalone: napięcia i prądu twornika, momentu
elektromagnetycznego (wyliczyć wg wzoru (3)),
prądu wzbudzenia i prędkości obrotowej;
•
wyznaczyć czas rozruchu i porównać go ze stałymi czasowymi silnika (elektromagnetyczną i
elektromechaniczną) oraz stałą rozruchową silnika, podać przyczyny rozbieżności.
Na podstawie dynamicznego modelu obwodowego silnika o danych wartościach parametrów
modelu obwodowego:
•
obliczyć „ręcznie” (oszacować) wartości udarowe i ustalone: prądu twornika, momentu
elektromagnetycznego (wyliczyć wg wzoru (3)),
prądu wzbudzenia i prędkości obrotowej.
•
porównać z wynikami wyznaczonymi doświadczalnie, podać przyczyny rozbieżności.
3. Porównać wyniki uzyskane na drodze doświadczalnej i symulacyjnej (program PSPICE) dla zadania
1 (wybrać jeden z przebiegów, np.: napięcie twornika, prąd twornika, moment elektromagnetyczny,
prąd wzbudzenia lub prędkość obrotową). Podać przyczyny rozbieżności.
4. Porównać wyniki uzyskane na drodze doświadczalnej i symulacyjnej (program PSPICE) dla zadania
21 (wybrać jeden z przebiegów, np.: napięcie twornika, prąd twornika, moment elektromagnetyczny,
prąd wzbudzenia lub prędkość obrotową). Podać przyczyny rozbieżności.
6. SPRAWOZDANIE
Opracowanie sprawozdania powinno zawierać:
•
stronę tytułową wg następującego układu wg wzoru podanego niżej;
•
nr zadania;
•
dane znamionowe, parametry modelu obwodowego i stałe czasowe badanego silnika (wartości
parametrów należy nanieść na rysunku przedstawiającym model obwodowy silnika!);
•
określenie wymuszeń elektrycznych i mechanicznych;
•
określenie warunków początkowych (wartości początkowe prądów i prędkości obrotowej);
Ćwiczenie: BADANIE DYNAMIKI SILNIKA PRĄDU STAŁEGO. Pomiary komputerowe
11
•
„ręczne” oszacowanie wartości udarowych i ustalonych wielkości badanych silnika oraz ich
porównanie z wartościami otrzymanymi na drodze doświadczalnej i symulacyjnej;
•
uzasadnienie fizyczne i analityczne uzyskanych wyników
(powinno to być napisane w stylu inżynierskim! —- tzn. minimum języka tekstowego a
maksimum języka graficznego i symbolicznego);
•
krótkę dyskusję wpływu dokładności pomiarów i założeń upraszczających modelu silnika na
uzyskane wyniki metodą doświadczalną i symulacyjną (program PSPICE);
•
wykaz literatury wykorzystanej przy pisaniu sprawozdania.
Wzór strony tytułowej sprawozdania
POLITECHNIKA GDAŃSKA
WYDZIAŁ ELEKTROTECHNIKI I AUTOMATYKI
KATEDRA ENERGOELEKTRONIKI I MASZYN
ELEKTRYCZNYCH
LABORATORIUM MASZYN ELEKTRYCZNYCH II
sem. V rok akad. 2001/02
ĆWICZENIE 2B
BADANIE DYNAMIKI SILNIKA PRĄDU STAŁEGO
POMIARY KOMPUTEROWE
Opracowali:
Imię i nazwisko:
..............................................................
..............................................................
Nr grupy laboratoryjnej/dziekańskiej:
Data oddania sprawozdania:
Ocena:
7. LITERATURA
1. S.
Bolkowski:
Stany nieustalone w obwodach elektrycznych. WNT, Warszawa, 1976.
2. R.H. Cannon (jr.): Dynamika układów fizycznych. WNT, Warszawa, 1973.
3. P.C. Krause i O. Wasynczuk: Electromechanical Motion Devices. Mc Graw -Hill Book Comp., New
York, 1989. Purdue University, USA.
4. P.C.
Krause:
Analysis of Electric Machinery. Mc Graus - Hill Book Comp., New York, 1986.
5. W.
Latek:
Teoria maszyn elektrycznych. WNT, Warszawa, 1982.
6. Z.
Manitius:
Maszyny elektryczne cz. I, II. Skrypt PG, 1982, 1984.
7. M. Michna: Instrukcja Programu NIDAQScope rejestracji pomiarów z zastosowaniem karty
pomiarowej National Instruments MIO-PCI 16E4 i komputera PC. Materiały pomocnicze do
laboratorium maszyny elektryczne II. Podstawy dynamiki maszyn elektrycznych. Katedra
Energoelektroniki i Maszyn Elektrycznych. WEiA. PG, Gdańsk, 2001.
(
www.ely.pg.gda.pl/keime/maszyny
)
8. W.
Paszek:
Stany nieustalone maszyn elektrycznych prądu przemiennego. WNT, Warszawa, 1986.
9. M.
Ronkowski:
Szkic do wykładów z przedmiotu Maszyny elektryczne II. Dynamika maszyn
elektrycznych. Katedra Energoelektroniki i Maszyn Elektrycznych. WEiA. PG, Gdańsk, 2001.
(
www.ely.pg.gda.pl/keime/maszyny
)
10. S. Roszczyk: Teoria maszyn elektrycznych. WNT, Warszawa, 1979.
11. P. Zimny, K. Karwowski: SPICE klucz do elektrotechniki. Instrukcja, program, przykłady. Skrypt
PG, 1993.
Wyszukiwarka
Podobne podstrony:
Me2 oscyloskop
me2 cw1a
me2 trafo
me2 cw2a
Wykresy ME2 CW3
me2
Egzamin1MaszynyElektryczne15.06.2009, Studia, semestr 4, Maszyny elektryczne, Maszyny elektryczne I,
me, Studia, semestr 4, Maszyny elektryczne, Maszyny elektryczne I, ME2
Me2
kolokwium 1, Studia, semestr 4, Maszyny elektryczne, Maszyny elektryczne I, ME2
cw2B
Me2
Ćw2b
Ćw2b
me2 cw4b
cw2b
Cw2B
cw2b t
cw2b r
więcej podobnych podstron