
L
L
E
E
C
C
T
T
U
U
R
R
E
E
7
7
S
S
T
T
R
R
E
E
S
S
S
S
I
I
N
N
F
F
L
L
U
U
I
I
D
D
S
S
.
.
C
C
O
O
N
N
S
S
T
T
I
I
T
T
U
U
T
T
I
I
V
V
E
E
R
R
E
E
L
L
A
A
T
T
I
I
O
O
N
N
A
A
N
N
D
D
N
N
E
E
W
W
T
T
O
O
N
N
I
I
A
A
N
N
F
F
L
L
U
U
I
I
D
D
.
.
M
M
A
A
T
T
H
H
E
E
M
M
A
A
T
T
I
I
C
C
A
A
L
L
M
M
O
O
D
D
E
E
L
L
F
F
O
O
R
R
I
I
N
N
T
T
E
E
R
R
N
N
A
A
L
L
F
F
O
O
R
R
C
C
E
E
S
S
I
I
N
N
F
F
L
L
U
U
I
I
D
D
S
S
.
.
S
S
T
T
R
R
E
E
S
S
S
S
T
T
E
E
N
N
S
S
O
O
R
R
.
.
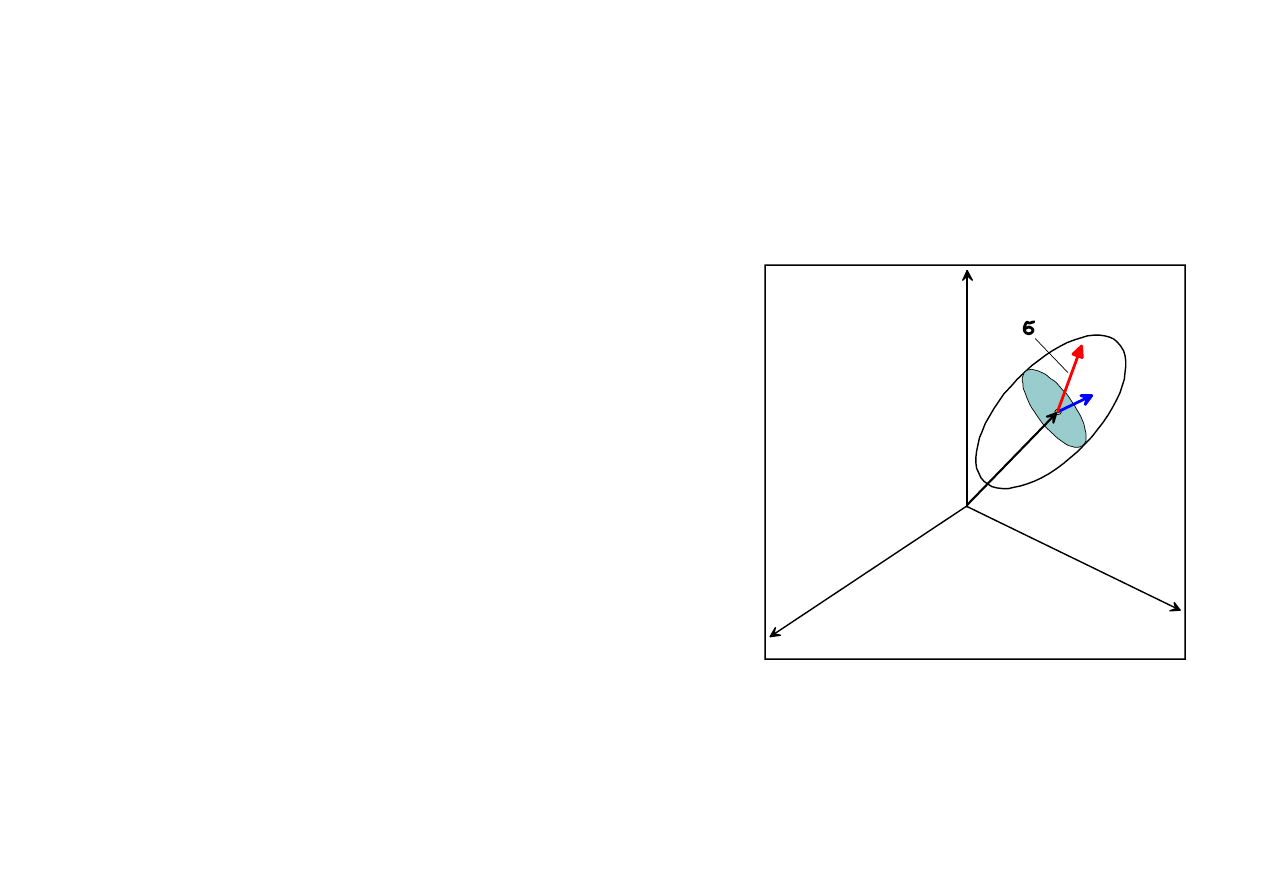
According to
Cauchy hypothesis
, the surface (or interface) reaction force acting between
two adjacent portions of a fluid can be characterized by its surface vector density called the
stress.
Thus, for an infinitesimal piece
dA
of the interface
1
2
, we have (see figure)
d
dA
F
σ
and
2
1
1
2
dA
F
σ
The stress vector
σ
is not a vector field: it depends not
only on the point
x
but also on the orientation of the
surface element
dA
or – equivalently – on the vector
n
normal (perpendicular) to
dA
at the point
x
.
From the 3
rd
principle of Newton’s dynamics (action-reaction principle) we have
( , )
( ,
)
σ x n
σ x n
x
1
x
3
x
2
0
dA
n
dF = dA
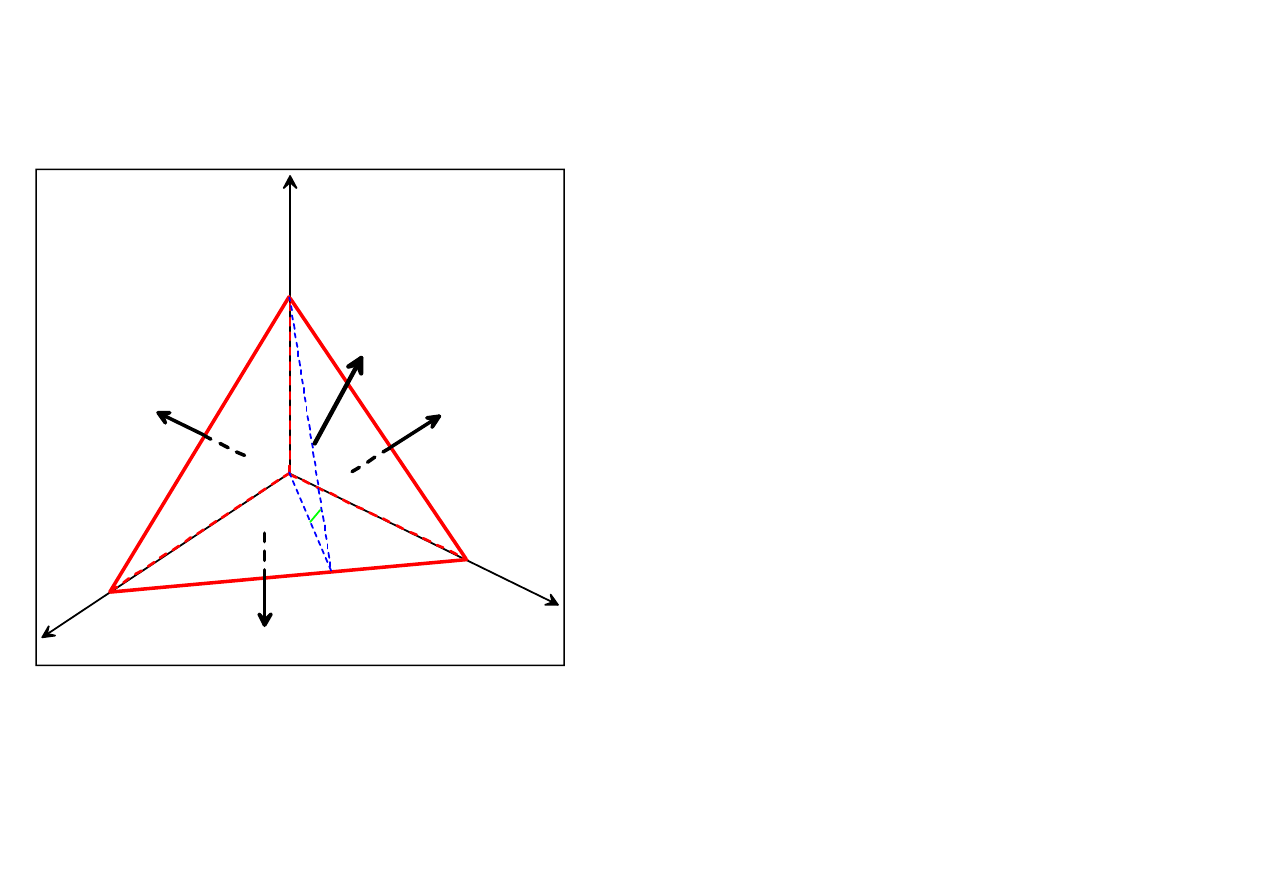
We will show that the value of stress vector
σ
can be expressed by means of a tensor field. To
this aim, consider a portion of fluid in the form of small tetrahedron as depicted in the figure
below.
The front face
ABC
belongs to the plane which
is describes by the following formula
j
j
( , )
n x
h
n x
,
h
– small number.
The areas of the faces of the tetrahedron are S, S
1
,
S
2
and S
3
for
ABC
,
OBC
,
AOC
and
ABO
, respectively. Obviously,
2
S
O(h )
.
Moreover, the following relations hold for
j = 1,2,3:
j
j
j
j
S
Scos[ ( , )] S ( , ) Sn
n e
n e
The volume of the tetrahedron is
3
V
O(h )
.
x
1
x
3
x
2
0
n=[n
1
,n
2
,n
3
]
-e
1
-e
2
-e
3
A
B
C
D
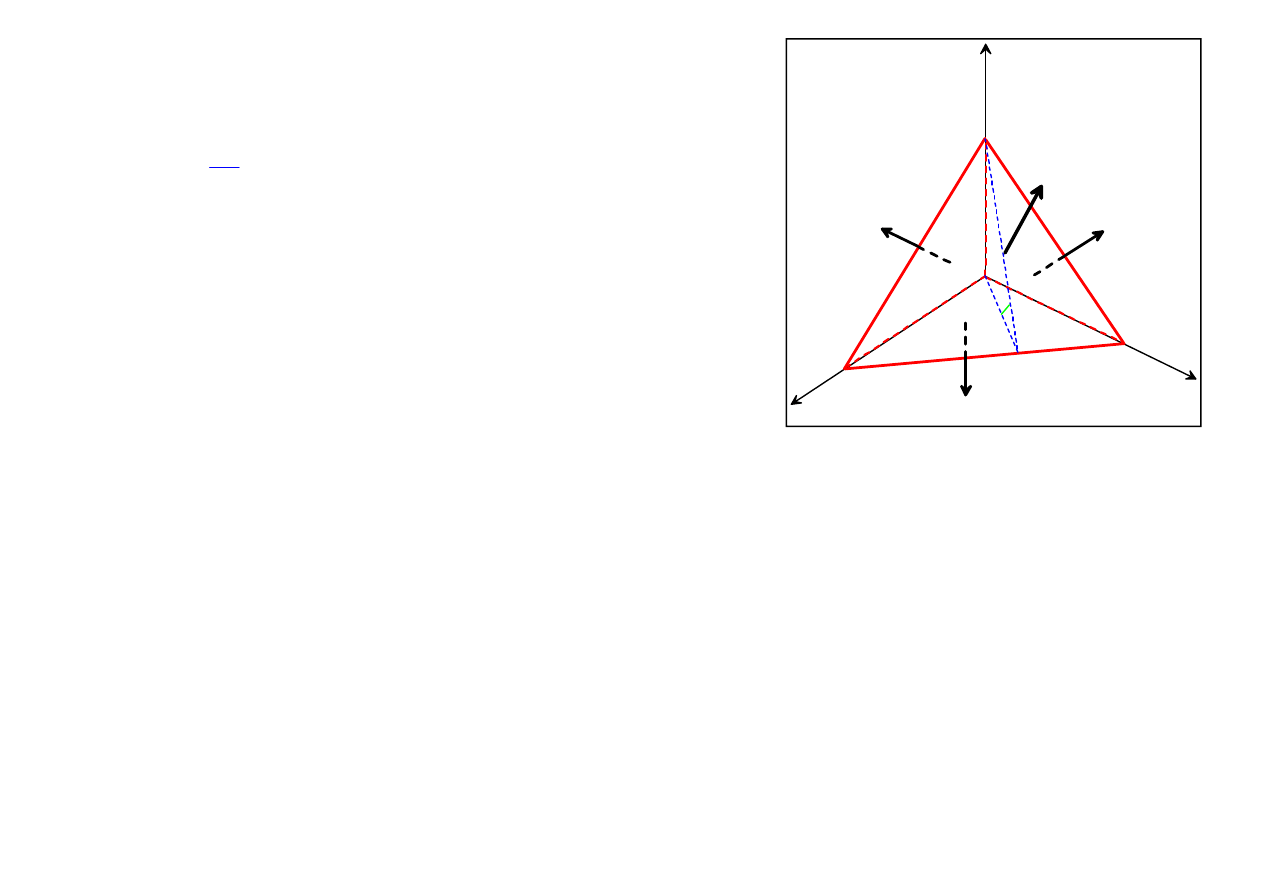
The momentum principle for the fluid contained inside
the tetrahedron volume reads
time derivative
of the momentum
total surface
total volume
fo
vol
surf
rce
force
d
d
dt
v x
F
F
We need to calculate the total surface force
surf
F
.
We have:
on
ABC
:
( , )
( , ) O(h)
σ x n
σ 0 n
ABC
3
surf
S ( , ) O(h )
F
σ 0 n
on
OBC
:
1
1
1
( ,
)
( , )
( , ) O(h)
σ x e
σ x e
σ 0 e
OBC
3
3
1
1
1
1
surf
S
( , ) O(h )
Sn
( , ) O(h )
F
σ 0 e
σ 0 e
on
AOC
:
2
2
2
( ,
)
( ,
)
( ,
) O(h)
σ x e
σ x e
σ 0 e
AOC
3
3
2
2
2
2
surf
S
( ,
) O(h )
Sn
( ,
) O(h )
F
σ 0 e
σ 0 e
on
AOB
:
3
3
3
( ,
)
( ,
)
( ,
) O(h)
σ x e
σ x e
σ 0 e
AOB
3
3
3
3
3
3
surf
S
( ,
) O(h )
Sn
( ,
) O(h )
F
σ 0 e
σ 0 e
x
1
x
3
x
2
0
n=[n
1
,n
2
,n
3
]
-e
1
-e
2
-e
3
A
B
C
D
When the above formulas are inserted to the equation of motion we get
3
2
3
O( h )
O(h )
O( h )
3
vol
j
j
d
d
S[ ( , ) n
( , ) ] O(h )
dt
v x
F
σ 0 n
σ 0 e
When
h
0
the above equation reduces to
j
j
( , ) n
( , )
0
σ 0 n
σ 0 e
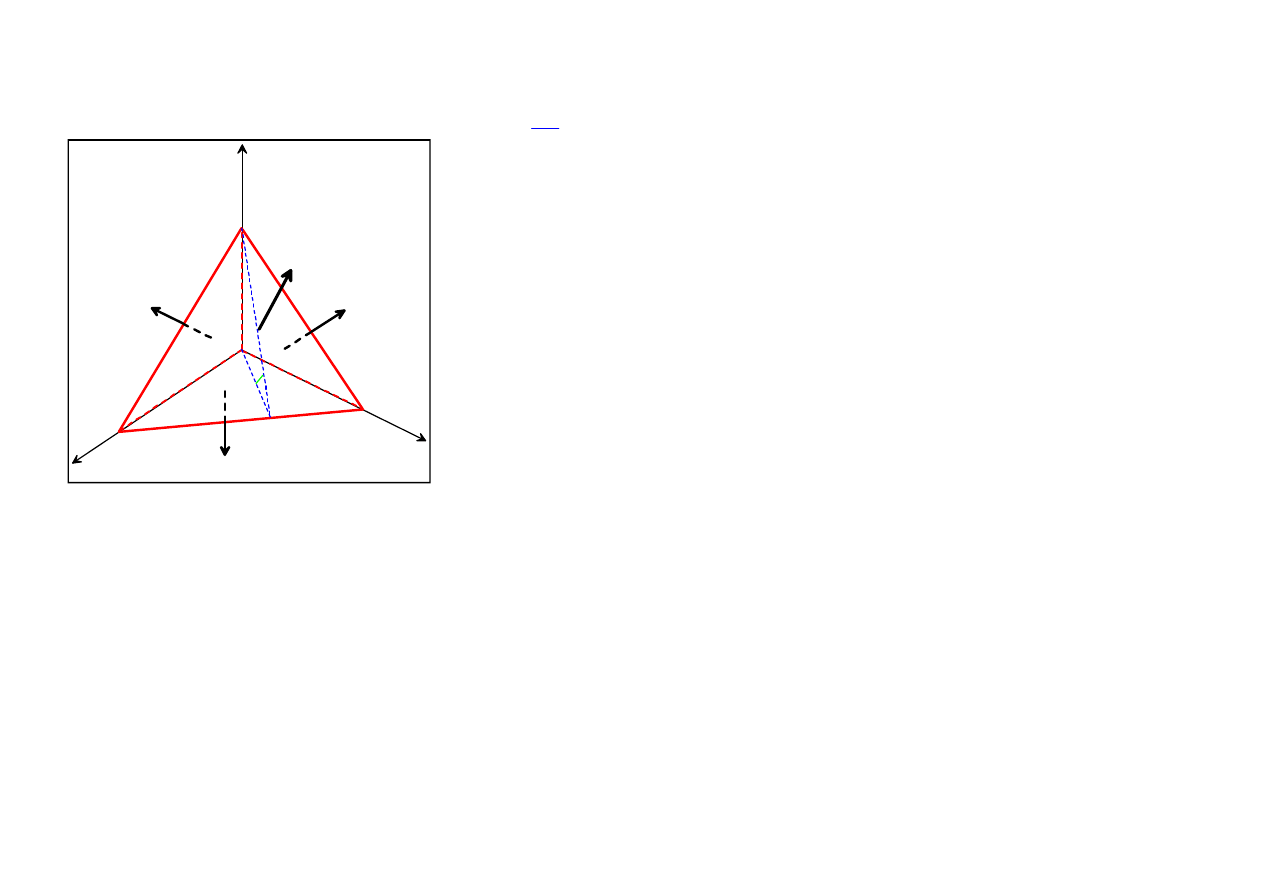
In general case, the vertex O is not the origin of the coordinate
system and the field of stress is time dependent. Hence, we
can write
j
j
(t, , )
n
(t, , )
σ
x n
σ
x e
In the planes oriented perpendicularly to the vectors
e
1
,
e
2
or
e
3
,
the stress vector can be
written as
j
ij
i
(t, , )
(t, )
σ
x e
x e
Thus, the general formula for the stress vector takes the form
j
j
ij
j i
(t, , ) n
(t, , )
(t, )n
(t, )
σ
x n
σ
x e
x
e
Ξ
x n
We have introduced the matrix
Ξ
which represents the stress tensor. The stress tensor
depends on time and space coordinates, i.e., we actually have the tensor field.
x
1
x
3
x
2
0
n=[n
1
,n
2
,n
3
]
-e
1
-e
2
-e
3
A
B
C
D

Note that the stress tensor
can be viewed as the linear mapping (parameterized by
t
and
x
)
between vectors in 3-dimensional Euclidean space
3
3
j j
ij
j i
: E
w
w
E
w
e
e
In particular
ij
j i
( )
n
n
Ξn
e
σ
i.e., the action of
on the normal vector
n
at some point of the fluid surface yields the
stress vector
σ
at this point.
It is often necessary to calculate the normal and tangent stress components at the point of
some surface.
Normal component is equal
inner (scal
n
ar)
product
(
)
( ,
)
n
σ
n Σn n
n Σn
Tangent component can be expressed as
i
n
m
m
ij
j i
km k
i i
ij
j
km k
i
i
n
(
n n )n
[
n
(
n n )n ]
σ
σ
σ
n
e
e
e
or, equivalently (verify!) as
(
)
σ
n
σ n

C
C
O
O
N
N
S
S
T
T
I
I
T
T
U
U
T
T
I
I
V
V
E
E
R
R
E
E
L
L
A
A
T
T
I
I
O
O
N
N
The constitutive relation for the (simple) fluids is the relation between stress tensor
Ξ
and
the deformation rate tensor
D
. This relation should be postulated in a form which is frame-
invariant and such that the stress tensor is symmetric.
Let’s remind two facts:
The velocity gradient
v
can be decomposed into two parts: the symmetric part
D
called the deformation rate tensor and the skew-symmetric part
R
called the (rigid)
rotation tensor.
v
D R
Tensor
D
can be expressed as the sum of the spherical part
D
SPH
and the deviatoric part
D
DEV
DEV
SPH
D
D
D
where
SPH
tr
1
1
(
)
3
3
D
D
I
v I
and
j
i
k
DEV
DEV ij
ij
j
i
k
v
v
v
1
1
1
div
(
)
3
2
x
x
3 x
D
D
v I
D

The general constitutive relation for a (simple) fluid can be written in the form of the matrix
“polynomial”
2
3
0
0
1
2
3
( )
c
c
c
c
...
Ξ
D
Σ
I
D
D
D
P
where the coefficients are the function of 3 invariants of the tensor
D
, i.e.
1
2
3
k
k
c
c [ I ( ),I ( ),I ( )]
D
D
D
.
Consider the characteristic polynomial of the tensor
D
3
2
1
2
3
p ( )
det[
]
I
I
I
D
D
I
.
The Cayley-Hamilton Theorem states that the matrix (or tensor) satisfies its own
characteristic polynomial meaning that
3
2
1
2
3
p ( )
I
I
I
D
D
D
D
D
0
Thus, the 3
rd
power of
D
(and automatically all higher powers) can be expressed as a linear
combinations of
I
,
D
and
D
2
.
Hence, the most general polynomial constitutive relation is given by the 2
nd
order formula
2
0
0
1
2
( )
c
c
c
Σ
D
Σ
I
D
D
P

N
N
E
E
W
W
T
T
O
O
N
N
I
I
A
A
N
N
F
F
L
L
U
U
I
I
D
D
S
S
The behavior of many fluids (water, air, others) can be described quite accurately by the
linear constitutive relation. Such fluids are called
Newtonian fluids
.
For Newtonian fluids we assume that:
0
c
is a linear function of the invariant
I
1
,
1
c
is a constant,
2
c
0
.
If there is no motion we have the Pascal Law: pressure in any direction is the same. It means
that the matrix
0
Ξ
should correspond to a spherical tensor and
0
0
p
p
n
I
Ξ
Ξ
The constitutive relation for the Newtonian fluids can be written as follows
1
1
0
0
0
I ( )
2
DEV
c
c
3
p
(
)
2
p
(
)(
)
2
D
Ξ
Ξ
v
Ξ
I
I
D
I
v I
D
where
μ
- (shear) viscosity (the physical unit in SI is kg/m∙s)
ζ
- bulk viscosity (the same unit as
μ
) ; usually
and
can be assumed zero
.
The constitutive relation can be written in the index notation
j
k
i
2
3
ij
ij
k
j
i
v
v
v
p (
)
x
x
x
For an incompressible fluid we have
j
j
v
div
0
x
v
v
and the constitutive relation
reduces to the simpler form
p
2
Ξ
I
D
or, in the index notation
ij
ij
i
j
j
i
p
v
v
x
x
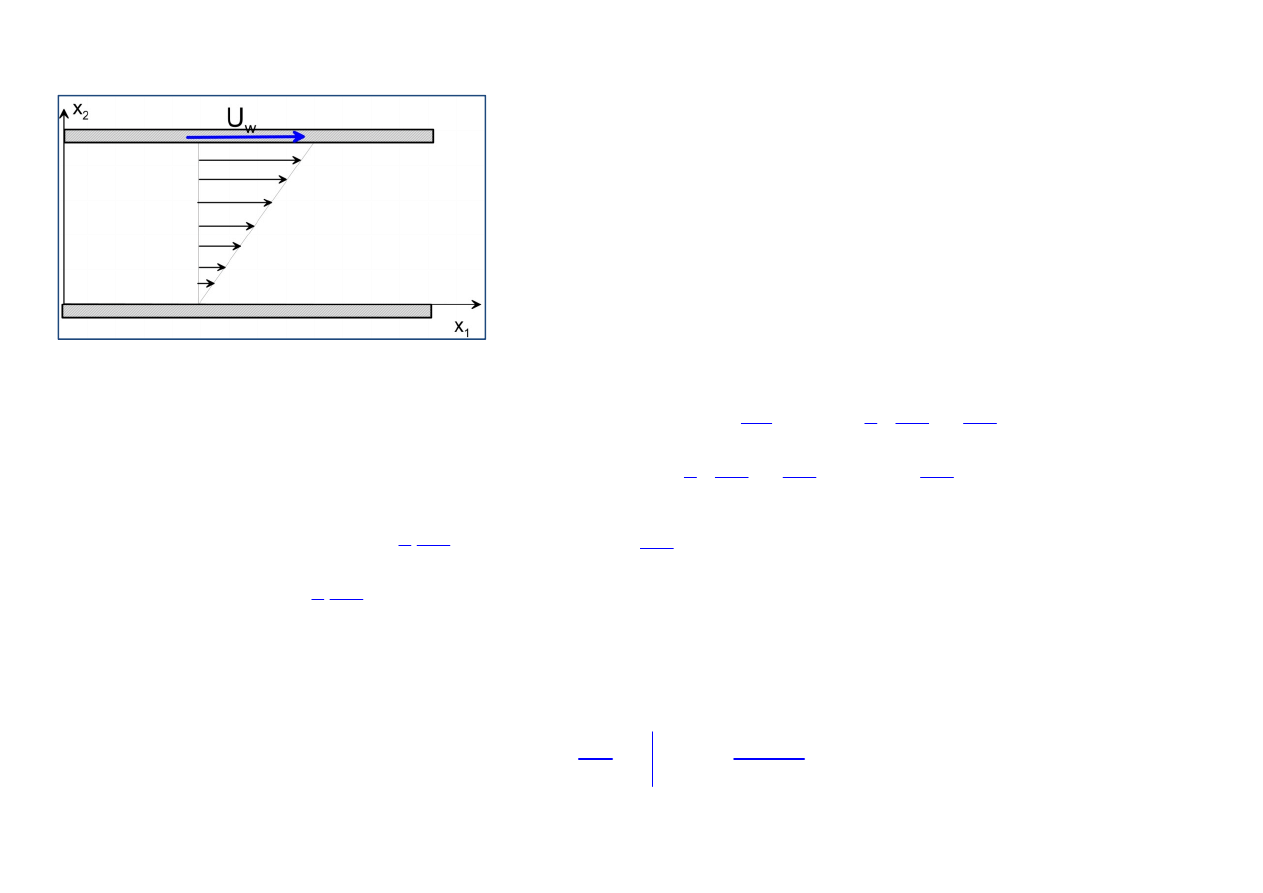
Example: Calculate the tangent stress in the wall shear layer.
The velocity field is defined as follows:
1
1
2
2
2
1
2
v ( ,
)
/
,
v ( ,
)
0
wall
x x
U
x
H
x x
and the pressure is constant. At the bottom wall, the
normal vector which points outwards is
[0, 1]
n
.
Then
1
1
2
1
2
1
1
2
2
2
1
2
1
1
2
2
1
2
v
v
v
1
x
2
x
x
v
v
v
1
[0, 1]
2
x
x
x
v
v
1
2 x
w
x
v
1
2 x
(
)
0
0
p
2
2
(
)
p
1
0
0
0
U / H
2
0
p
1
p
p
σ
Ξn
n
Dn
According to the action-reaction principle, the tangent stress at the bottom wall is
2
1
v
w
wall
x
wall
U
H
Wyszukiwarka
Podobne podstrony:
Posttraumatic Stress Symptomps Mediate the Relation Between Childhood Sexual Abuse and NSSI
Public Relations oglne
Media Relationsch3
ipp2p L7
różnice między public relations a reklamą (2 str), Marketing
Samorządowy PR. Zadania biura prasowego i PR oraz jego miejsce w strukturze urzędu, Public Relations
L7 I2Y3S1 7
Public Relations wykłady
Ch18 Stress Calculations
Ogden T A new reading on the origins of object relations (2002)
nOTATKI, L7 ' English Disease'
Piasta Ł , Public Relations Istota, techniki, s 20 84
Marketing, Public Relations
Plan działań PR, Public Relations
Public relations sci, Politologia, Komunikowanie społeczne
Marketing i public relations w malej firmie Wydanie II zaktualizowane markp2
60przeksztalcanie predkosci w mechanice relatiwystycznej
Rzecznik prasowy-charakterystyka zawodu, Public Relations i Rzecznicwo prasowe
les pronoms relatifs grammaire fle wikispaces com
więcej podobnych podstron