WYDZIAŁ MECHANICZNY ENERGETYKI I LOTNICTWA
POLITECHNIKI WARSZAWSKIEJ
Zakład Teorii Maszyn i Robotów
Laboratorium Podstaw Automatyki i Sterowania IV
Instrukcja do ćwiczenie nr 2
Badania symulacyjne układu napędowego
z silnikiem prądu stałego

1
Cel ćwiczenia
Celem ćwiczenia jest badanie własności modelu stopnia napędowego dla:
• sil
nika obciążonego stałym momentem,
•
silnika obciążonego momentem zmiennym,
Dla każdego z powyższych modeli silnika należy zaobserwować działanie układu przy
różnych wymuszeniach. Ćwiczenie ma na celu pokazanie studentom zastosowania
oprogramowania Matlab Simulink w badaniu modeli rzeczywistych, w tym przypadku
modelu silnika prądu stałego. Wychodząc z modelu fizycznego, poprzez model
matematyczny do różnych sposobów opisu tego samego zjawiska.
1.1
Opis obiektu badań
Przedmiotem fizycznym podlegającym badaniu jest stopień napędowy stosowany
do
sterowania ruchem postępowym lub obrotowym członu konstrukcji mechanicznej
(np. ramienia robota).
W stopniu napędowym stosowany jest elektryczny silnik bezszczotkowy prądu stałego.
Ruch obrotowy wirnika silnika przenoszony przez przekładnię (reduktor) napędza ruch
obrotowy ramienia manipulatora (lub innego członu). Zastosowanie układu zamieniającego
ruch obrotowy na postępowy umożliwia uzyskanie napędu o ruchu postępowym.
W celu sterowania (czyli celowego oddziaływania) ruchem obrotowym obciążenia trzeba
celowo wpływać na obroty wirnika. Sterowanie obrotami wirnika jest możliwe przez zmiany
napięcia (albo natężenia) prądu płynącego w obwodzie elektrycznym silnika. Trzeba wiedzieć
w jaki sposób zmienić napięcie (natężenie) w obwodzie elektrycznym silnika aby uzyskać
pożądane położenie (lub prędkość kątową) obciążenia.
Silnik elektryczny nie jest idealnym układem wykonawczym. Jako układ mechaniczny ma
on pewną bezwładność, w czasie obrotów wirnika występuje tarcie wiskotyczne między
ruchomym wirnikiem a nieruchomą częścią silnika. Tarcie wiskotyczne występuje także
w
przekładni, co daje efekt tłumienia sygnału. Obwód elektryczny silnika ma dodatkowo
m.in. własną indukcyjność (efekt różniczkowania sygnału) oraz oporność (tłumienie sygnału).
Skumulowanie wszystkich dodatkowych oddziaływań „zniekształca” rezultat sterowania.
W szczególności można uzyskać niestabilne zachowanie się układu, a więc
np. oscylujące położenie kątowe obciążenia albo położenie obarczone dużym błędem.
Ze względu na omówione wyżej czynniki, w rzeczywistych stopniach napędowych
wprowadza się regulatory o tak dobranych parametrach aby kompensować wszystkie
niepożądane zjawiska i aby układ regulacji miał pożądane cechy, jak np. określone wartości
zapasu stabilności (np. zapasu modułu, zapasu fazy) czy określony czas regulacji.
Położenie regulatora w układzie sterowania jest zależne od celu jaki chcemy osiągnąć.
Regulat
or włączony w pętlę sprzężenia zwrotnego kształtuje sygnał zwrotny, przed
wzmacniaczem kształtuje sygnału uchybu, przed węzłem sumacyjnym kształtuje wartość
zadaną.
3
2 Model obiektu
2.1 Wprowadzenie
Pierwszym etapem prac przy projektowaniu stopnia napędowego jest sformułowanie jego
modelu matematycznego. Tworząc model powinniśmy pamiętać, które wielkości traktujemy
jako –
wejściowe a które – jako wielkości wyjściowe. W modelu tym powinny być
uwzględnione wartości parametrów rzeczywistego stopnia napędowego (jak np. rezystancja,
pojemność, indukcyjność, moment bezwładności itd.).
2.2
Model obciążonego silnika
Silnik rozpatrujemy jako element wykonawczy układu regulacji prędkości kątowej wirnika
ω.
Wyjściem układu silnika jest prędkość kątowa wirnika.
Tworzony model ob
ciążonego silnika zakładając najłatwiejszy do opisu przypadek, gdy
moment pochodzący od obciążenia i moment bezwładności obciążenia jest stały. Taki model
jest często wykorzystywany przy projektowaniu napędów w robotyce, gdzie nadmiar mocy
silników pozwala
pomijać efekty wynikające ze zmieniających się momentów pochodzących
od obciążeń.
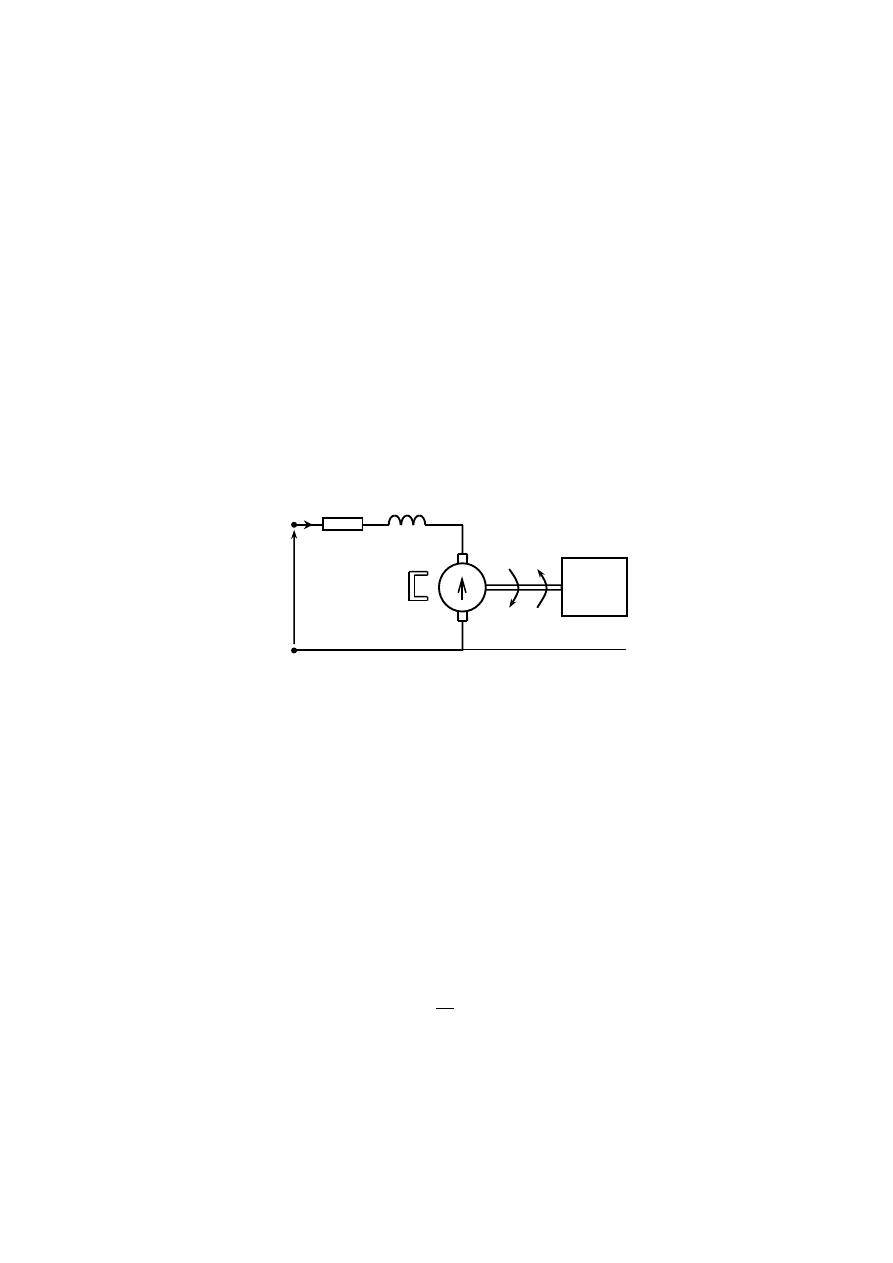
Rys. 1. Schemat ideowy silnika prądu stałego.
Na wejście układu, doprowadzamy napięcie elektryczne u
a
Moment obrotowy silnika powstaje wskutek dynamicznego oddziaływania pola
magnetycznego na przewód z prądem umieszczony w tym polu. Pole magnetyczne jest
wytwarzane przez jedną lub kilka par biegunów elektromagnesów w umieszczonej zwykle
części nieruchomej tzw. magneśnicy (jeśli jest to silnik prądu stałego) lub stojanie (jeśli jest to
silnik prądu przemiennego). W części elektrycznej silnika (obwodzie twornikowym)
wzbudzana jest siła przeciwelektromotoryczna powodująca obrót wirnika (wraz
z
twornikiem). Dla uproszczenia pojemność obwodu twornikowego będzie pomijana,
rezystancja zastępcza tego obwodu (uwzględniająca twornik) niech będzie równa R,
a
indukcyjność L.
(może też być prąd
regulowany), wyjście rozumiane jest w niniejszym przykładzie jako prędkość
ω.
Stosując prawo Kirchoff’a do obwodu twornika, wyznaczamy napięcie sterujące
w obwodzie twornikowym:
e
dt
di
L
Ri
u
a
+
+
=
(1)
gdzie:
u
a =
u
a
R
-
rezystancja tego obwodu (jednostka Ω),
(t)
-
napięcie sterujące w obwodzie twornikowym (jednostka V),
i = i(t)
-
prąd w obwodzie twornikowym (jednostka A),
L
-
indukcyjność obwodu (jednostka H),
R
L
I
E
U
J =J
w
+J
ob
Ω
M
Φ
M
4
e = e(t)
-
siła przeciwelektromotoryczna (jednostka V).
Siła przeciwelektromotoryczna e i prędkość kątowa wirnika ω są zależnością:
ω
b
k
e
=
(2)
gdzie:
k
b
rad
Vs
-
stała elektromotoryczna silnika (jednostka
)
Podstawiając w równaniu 1 prawą stronę równania 2 otrzymujemy:
ω
b
a
k
dt
di
L
Ri
u
+
+
=
(3)
Moment m
w
rozwijany przez wirnik misi równoważyć moment własny silnika i moment
pochodzący od obciążenia m
b
ω
ω
f
dt
d
J
m
w
+
=
. Równanie to można zapisać w postaci:
(4)
gdzie:
J –
łączny moment bezwładności silnika i obciążenia (jednostka
2
/ s
rad
Nm
)
f –
współczynnik tarcia wiskotycznego (jednostka
s
rad
Nm
/
)
Moment obrotowy m
w
i
k
m
t
w
=
rozwijany
przez wirnik silnika jest proporcjonalny do natężenia
prądu płynącego w obwodzie twornika:
(5)
gdzie:
k
t
A
Nm
–
tzw. stała momentu silnika (jednostka
),
Równania 3 i 4 są bazowymi równaniami do dalszych rozważań. Pozwolą one na dalszą
analizę modelu silnika prądu stałego zarówno metodą przestrzeni stanów jak i metodą
transmitancji.
2.3 Model silnika w przestrzeni stanów
Opis modelu silnika w przestrzeni stanów oparty jest na równaniach stanu, które są
równaniami różniczkowymi opisującymi proces ciągły zachodzący w czasie. Zmiennymi
stanu są zmienne zawarte w równaniach stanu. Ogólne równanie stanu ma postać:
(
)
t
u
x
f
x
,
,
=
(6)
lub w postaci macierzowej:
Bu
Ax
x
+
=
(7)
gdzie :
f – funkcja wektorowa,
A, B – macierze funkcyjne,
x – wektor zmiennych stanu,
u –
wektor zmiennych sterujących,
t – czas.
5
W przypadku rozpatrywanego silnika prądu stałego, zmiennymi stanu są prąd silnika i
oraz prędkość obrotowa ω.
Równania 3 i 4 można zapisać w postaci (uwzględniając 5):
L
u
L
k
i
L
R
dt
di
a
b
+
−
−
=
ω
(8)
ω
ω
J
f
i
J
k
dt
d
t
−
=
(9)
Jak można zauważyć równania te są już równaniami stanu, wiec można je zapisać w
postaci macierzowej:
+
−
−
−
=
0
)
(
0
0
0
)
(
)
(
1
t
u
t
t
i
a
L
J
f
J
k
L
k
L
R
dt
d
dt
di
t
b
ω
ω
(10)
Równanie macierzowe 10 jest końcowym równaniem i pozwala ono na bezpośrednią
implementacje w programie Matlab Simulink.
2.4
Transmitancja obciążonego silnika
Punktem wyjścia do wyznaczenia transmitancji silnika są równania 3 i 4, na nich to zostanie
wykonana transformat Laplace’a i przekształcenia w celu implementacji modelu w programie
Matlab Simulink.
Po dokonaniu transformaty Laplace’a zależności 3 i takim uporządkowaniu wyrazów, aby
uzyskać zależność natężenia prądu od napięcia U
a
)
(
)
(
)
(
s
sL
R
k
s
U
sL
R
I
s
I
b
a
a
Ω
+
−
+
=
(s)
i prędkości Ω(s) otrzymujemy:
(11)
Dla odróżnienia transformat od ich oryginałów użyliśmy powyżej dużych liter do
oznaczenia transformat zmiennych.
Po dokonaniu transformaty Laplace’a zależność (5) i uwzględnieniu jej w (11)
otrzymujemy zależność między momentem rozwijanym przez silnik a napięciem U
a
)
(
)
(
)
(
s
sL
R
k
k
s
U
sL
R
k
s
M
b
t
a
t
w
Ω
+
−
+
=
(s)
(na
pięciem sterującym) i prędkością Ω(s), której wpływ uwidacznia się przez zwrotne
oddziaływanie siły przeciwelektromotorycznej:
(12)
Podobnie postępujemy z równaniem 4, gdzie po dokonaniu transformaty Laplace’a
otrzymujemy:
)
(
)
(
)
(
s
f
s
s
J
s
M
w
Ω
+
Ω
=
(13)
Zauważamy, że zależność 12 podaje moment M
w
Moment M
rozwijany przez wirnik silnika w funkcji
parametrów obwodu elektrycznego, natomiast w zależności 13 moment ten jest wyrażony
w
funkcji parametrów mechanicznych obciążenia.
w
rozwijany prz
ez silnik (rozumiany w opisie części elektrycznej jako wielkość
wyjściowa) zależy od napięcia sterującego U
a
(wielkość wejściowa) oraz od prędkości
kątowej (przenoszonej zwrotnie), zależność 12. Z drugiej zaś strony moment ten równoważy
obciążenie posiadające prędkość kątową Ω(s) (wielkość wyjściowa), co jest opisane
zależnością 13.
6
Na podstawie wprowadzonych zależności można wyznaczyć transmitancję obciążonego
silnika, porównując stronami 12 oraz 13:
sL
R
s
k
s
U
k
s
f
s
s
J
b
a
t
+
Ω
−
=
Ω
+
Ω
)
(
)
(
)
(
)
(
(14)
Wielkością wejściową silnika jest napięcie U
a
(
)
t
b
t
a
s
k
k
Rf
Lf
RJ
s
JL
s
k
s
U
s
G
+
+
+
+
=
Ω
=
2
)
(
)
(
(s
), wielkością wyjściową prędkość kątowa
Ω(s). Transmitancja obciążonego silnika jest więc równa:
(15)
2.5 Parametry silnika
Jeżeli prowadzący nie poda innych parametrów silnika, należy użyć następujących wartości
(wielk
ości podane są w jednostkach wcześniej sprecyzowanych, podane jednostki zapewniają
zgodność obliczeń, tak więc dalej ich nie piszemy):
U
a
-
napięcie maksymalne zasilania
U
a
L -
indukcja uzwojeń silnika
L = 3.88 * 10
= 35
R - rezystancja u
zwojeń silnika
R = 1.5
-3
k
b
-
stała elektromotoryczna silnika,
k
b
k
= 1.2
t
-
stała momentu silnika
k
t
J
= 0.62
m
-
moment bezwładności silnika
J
m
= 25.5*10
ƒ -
współczynnik tarcia wiskotycznego silnika ƒ
- 4
m
2.6 Schema
t stopnia napędowego zrealizowany w SIMULINKU
= 0.169.
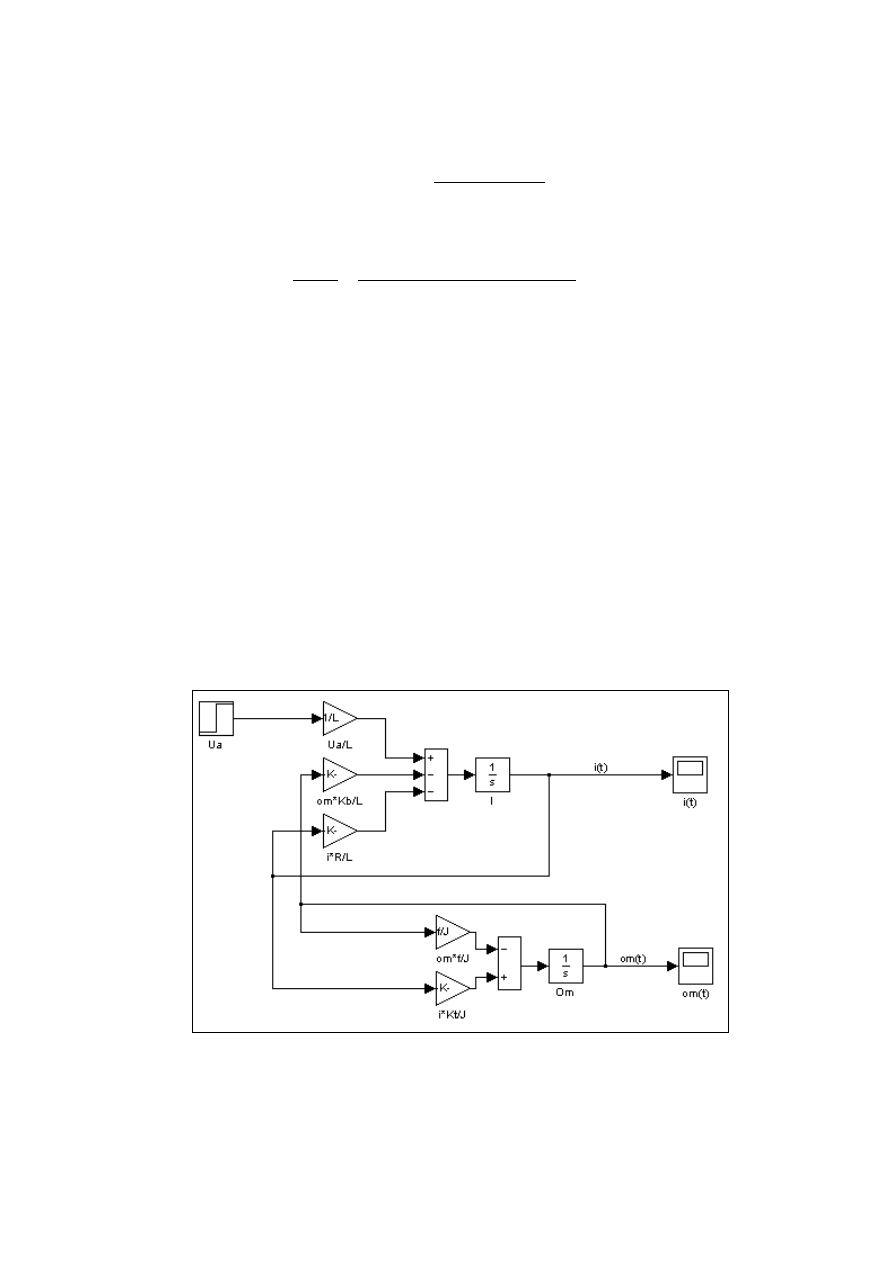
W trakcie ćwiczenia należy zbudować modele silnika prądu stałego na podstawie równań
różniczkowych 8 i 9, równań stanu 10 oraz transmitancji 15.
Rys. 2. Schemat blokowy silnika prądu stałego na podstawie równań różniczkowych.
7
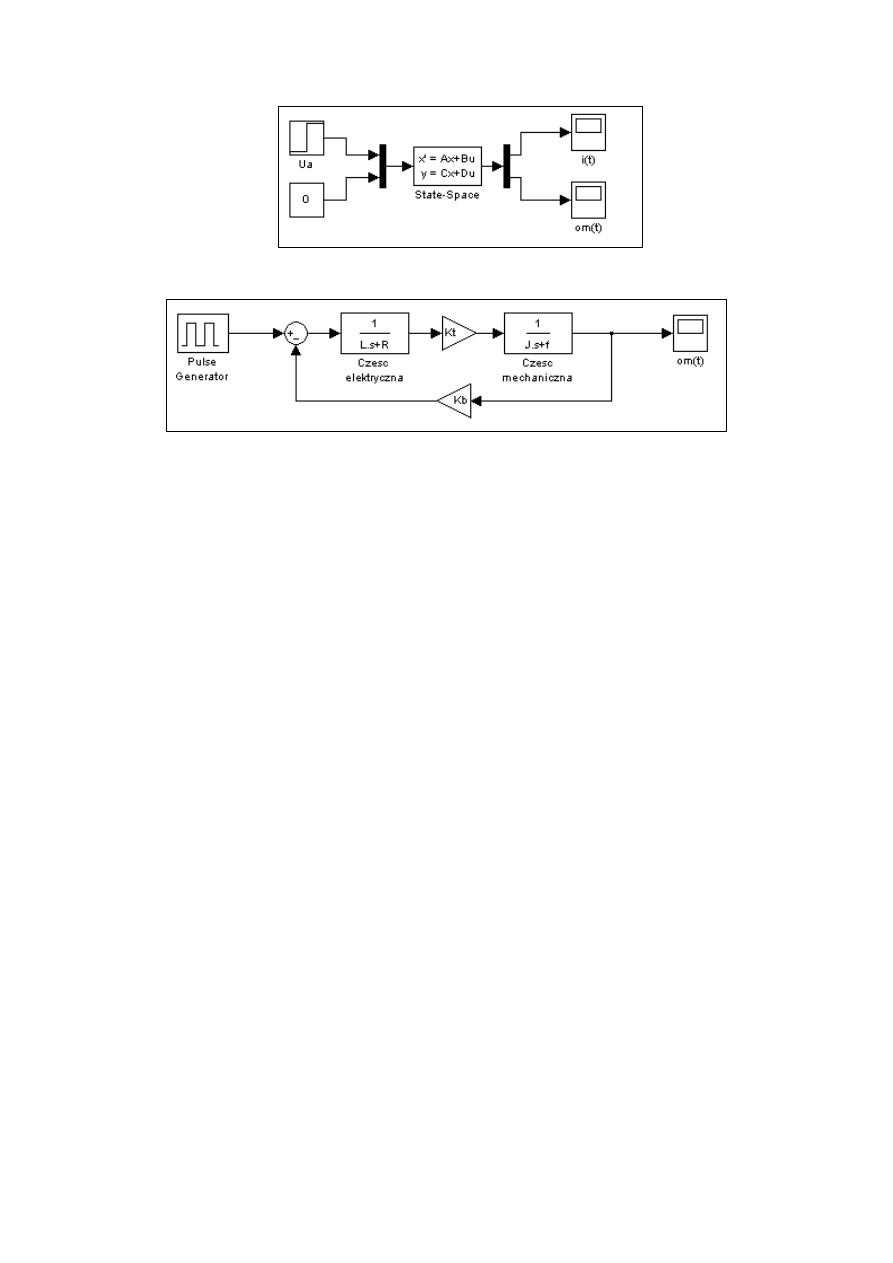
Rys. 3. Schemat blokowy silnika prądu stałego z równaniami stanu.
Rys. 4. Schemat transmitancji silnika prądu stałego.
3
PRZEBIEG ĆWICZENIA
CZĘŚĆ I:
1.
Wykonać modele silnika prądy stałego na podstawie :
• rów
nań różniczkowych,
•
równań stanu
• transmitancji
2.
Podłączyć modele silnika do układów pomiarowych.
3.
Wykonać wykresy odpowiedzi silnika na wymuszenie skokowe (skok napięcia
zasilania).
CZĘŚĆ II:
1.
Dla modelu wykonanego w oparciu o równania różniczkowe wykreślić rodzinę
charakterystyk zależności prędkości obrotowej ω i prądu twornika i od
zewnętrznego obciążenia ω = f(J
0
), i = f(J
0
2.
Dla modelu wykonanego w oparciu o równania stanu wykreślić rodzinę
charakterystyk prędkości obrotowej ω i prądu twornika i od napięcia zasilania
ω = f(u
).
a
), i = f(u
a
3. Dla modelu wykonanego w oparciu o transmitancje zasilanego z generatora fali
prostokątnej, wykreślić zależność prędkości obrotowej ω od współczynnika
wypełnienia impulsu ω = f(h).
).
4 SPRAWOZDANIE
W sprawozdaniu należy zamieścić:
1.
Zwięzły opis zadania i schematy połączeń
2. Wyniki obserwacji charakterystyk skokowych dla poszczególnych modeli
3.
Wyniki symulacji przeprowadzonych w trakcie ćwiczenia
4. Wnioski
Document Outline
- Zakład Teorii Maszyn i Robotów
- Laboratorium Podstaw Automatyki i Sterowania IV
- 1 Cel ćwiczenia
- 2 Model obiektu
- 3 PRZEBIEG ĆWICZENIA
- 4 SPRAWOZDANIE
Wyszukiwarka
Podobne podstrony:
02 Badania symulacyjne układu napędowego z silnikiem prądu stałego
BADANIE UKLADU NAPEDOWEGO Z SILNIKIEM PRADU STALEGO ZASILANYM Z NAWROTNEGO PRZEKSZTALTNIKA TYRYSTORO
02 Badania elementów układu zasilania silnika o zapłonie samoczynnym z sekcyjną pompą wtryskową
02 Badania elementów układu zasilania silnika o zapłonie samoczynnym z sekcyjną pompą wtryskową
Badanie silnika pradu stałego
Badanie układu napędowego z silnikiem bezszczotkowym z magnesami trwałymi
Silnik prądu stałego (symulator)v1
Badanie regulatora PID w układzie sterowania prędkością obrotową silnika prądu stałego
Badanie silnika pradu stałego
Badanie układu napędowego z silnikiem bezszczotkowym z magnesami trwałymi
Badanie silnika pradu stałego
silniki prądu stałego
silnik pradu stalego
Model silnika pradu stalego id Nieznany
silnik prądu stałego (tyrystor), Akademia Morska -materiały mechaniczne, szkoła, Mega Szkoła, szkola
DTR Silnik prądu stałego LD 020 LD 030 LD 055 2
Tabela do układu napędowego silnika asynchronicznego
więcej podobnych podstron